EP0578529B1 - Dispositif de sécurité pour ouvrants électriques véhicule, du type à câble d'entraînement d'un organe mobile, notamment lève-vitre et toits ouvrants - Google Patents
Dispositif de sécurité pour ouvrants électriques véhicule, du type à câble d'entraînement d'un organe mobile, notamment lève-vitre et toits ouvrants Download PDFInfo
- Publication number
- EP0578529B1 EP0578529B1 EP93401628A EP93401628A EP0578529B1 EP 0578529 B1 EP0578529 B1 EP 0578529B1 EP 93401628 A EP93401628 A EP 93401628A EP 93401628 A EP93401628 A EP 93401628A EP 0578529 B1 EP0578529 B1 EP 0578529B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- traveller
- switch
- travellers
- motor
- movable member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000001514 detection method Methods 0.000 claims description 19
- 230000008878 coupling Effects 0.000 claims description 16
- 238000010168 coupling process Methods 0.000 claims description 16
- 238000005859 coupling reaction Methods 0.000 claims description 16
- 239000003302 ferromagnetic material Substances 0.000 claims description 2
- 238000010586 diagram Methods 0.000 description 3
- 238000004519 manufacturing process Methods 0.000 description 3
- 238000005303 weighing Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000003638 chemical reducing agent Substances 0.000 description 1
- 230000002950 deficient Effects 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01H—ELECTRIC SWITCHES; RELAYS; SELECTORS; EMERGENCY PROTECTIVE DEVICES
- H01H35/00—Switches operated by change of a physical condition
- H01H35/006—Switches operated by mechanical overload condition, e.g. transmitted force or torque becoming too high
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F15/00—Power-operated mechanisms for wings
- E05F15/40—Safety devices, e.g. detection of obstructions or end positions
- E05F15/41—Detection by monitoring transmitted force or torque; Safety couplings with activation dependent upon torque or force, e.g. slip couplings
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2400/00—Electronic control; Electrical power; Power supply; Power or signal transmission; User interfaces
- E05Y2400/10—Electronic control
- E05Y2400/52—Safety arrangements associated with the wing motor
- E05Y2400/53—Wing impact prevention or reduction
- E05Y2400/54—Obstruction or resistance detection
- E05Y2400/55—Obstruction or resistance detection by using load sensors
- E05Y2400/552—Switches
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/50—Application of doors, windows, wings or fittings thereof for vehicles
- E05Y2900/53—Type of wing
- E05Y2900/55—Windows
Definitions
- the attraction force of the magnet 35 keeps the two carriages 6, 7 assembled as long as the force undergone by the carriage 7 carrying the movable member to be moved remains less than the attraction force of the magnet 35.
- this force exceeds said attractive force, the two carriages 6, 7 separate, the switch 17 changes state and the electrical supply circuit controls the reversal of the direction of rotation of the motor 5a.
- the security devices which have just been described with reference to Figs. 3 to 5 are said to have electrical memory, because for these embodiments it is necessary to provide an electrical diagram capable of keeping in memory the information that the system has triggered. , and therefore to react accordingly even when the effort has disappeared, to move the movable member (for example the window) to a given place, for example the low position to be sure that the obstacle has been completely released.
- the switch 56 is part of an electrical supply circuit capable of reversing the direction of rotation of the motor of the geared motor when the switch 56 changes state. This change of state is itself caused by the displacement of the magnet 49 from its position glued against the lower plate 52 to its position glued to the upper plate 51. In its position glued to the plate 52 (initial position) , the magnet pushes the rod of the switch 56, while in its position where it is glued to the plate 51, the contact between the magnet 49 and the switch 56 is interrupted.
- the tension spring 48 is prestressed and ensures the coupling of the two carriages 6, 7.
- the device will switch from its initial position, shown in FIG. 6, to its detection position if the elongation of the spring 48 is sufficient to that the rod 54 of the magnet 49 is driven in the upward movement by the carriage 6, and more precisely by the finger 53, the rod 54 then coming into abutment at the lower end of the slot 55.
- the latter has for function of authorizing a certain free movement of the carriage 6 relative to the carriage 7.
- the force on the movable member exceeds a certain predetermined limit, the rod 54 is driven by the carriage 6 and the magnet 49, which was glued against the plate 52, will come to stick against the plate 51.
- circuits of Fig. 11 and 12 are with mechanical memory, therefore not self-powered.
- the switches and their control circuits constitute a current loop ("fail safe”), which makes it possible to ensure that the circuit is operating correctly, and can put the system in safety.
- the different springs used for example 16 in Fig. 3, 48 in Fig. 6 ... are prestressed, unlike the springs in the above-mentioned prior documents (for example that of FR-A 2,461,085). They can thus be released from the effort threshold with extreme sensitivity, which constitutes an appreciable advantage compared to the known prior devices.
- the security system has the advantage of being relatively simple to manufacture and therefore inexpensive.
Landscapes
- Power-Operated Mechanisms For Wings (AREA)
- Window Of Vehicle (AREA)
- Electric Cable Arrangement Between Relatively Moving Parts (AREA)
Description
- La présente invention a pour objet un ouvrant électrique de véhicule selon le préambule de la revendication 1.
- On sait qu'il existe actuellement trois types de lève-vitre sur les véhicules automobiles : les lève-vitre à câble crémaillère, les lève-vitre à câble torsadé (câble Bowden) et les lève-vitre à bras et secteur denté. L'invention concerne ces lève-vitre ainsi que d'autres ouvrants électriques présentant des conditions de fonctionnement similaires, tout particulièrement les toits ouvrants qui sont entraînés par des câbles.
- Quand un obstacle se trouve sur le parcours de fermeture de la vitre (ou du toit ouvrant), le système doit reconnaître la présence d'un phénomène anormal et, si l'effort sur la vitre ou le toit ouvrant dépasse une valeur limite, la vitre ne doit pas continuer sa trajectoire, mais s'arrêter et au moins libérer l'effort. Cette libération de l'effort peut être obtenue soit en libérant la vitre qui descend sous un faible effort ou sous l'effet de son propre poids si le frottement dans le joint latéral le permet, soit en inversant le mouvement de la vitre, qui est alors forcée à descendre.
- Pour résoudre ce problème on a déjà proposé divers dispositifs de sécurité, électroniques et électromécaniques qui présentent, entre autres inconvénients, celui d'être relativement onéreux en raison de leur complexité. Ce coût de fabrication élevé est évidemment un obstacle à leur diffusion en grande série.
- Par ailleurs, le US-A 2.130.764 et le FR-A 2.461.085 décrivent des dispositifs de sécurité pour des portes pivotantes dans lesquels des interrupteurs (switches) travaillent à la fermeture. De ce fait, si le câblage est défectueux, le système de sécurité ne fonctionne pas.
- En outre, ces deux dispositifs antérieurs comportent des ressorts dont la course de travail est importante, et donc la sensibilité au déclenchement faible.
- L'invention a pour but de proposer un ouvrant électrique comportant un dispositif de sécurité électromécanique qui soit de fabrication simple, peu coûteuse, plus fiable et plus sensible que les dispositifs précités.
- L'ouvrant visé par l'invention qui est conforme à la revendication 1, comprend des moyens électromécaniques d'accouplement et de détection d'effort entre un premier élément menant de ladite chaîne, et un second élément mené, supportant l'organe mobile, ces moyens étant agencés de manière à désaccoupler automatiquement les deux éléments menant et mené l'un de l'autre en cas de détection d'un effort dépassant une valeur prédéterminée, s'opposant à la course de la vitre.
- Ainsi, si dans un lève-vitre un obstacle s'interpose à la fermeture de la vitre, par exemple une main ou une autre partie du corps d'un passager, le système électromécanique détecte cet effort. Si ce dernier dépasse une certaine limite, le système réagit en inversant le sens de rotation du moteur, faisant ainsi descendre la vitre en libérant l'obstacle.
- Un tel ouvrant électrique est de structure relativement simple et peu onéreuse.
- D'autres particularités et avantages de l'invention apparaîtront au cours de la description qui va suivre, faite en référence aux dessins annexés qui en illustrent diverses formes de réalisations à titre d'exemples non limitatifs.
- La figure 1 est une vue en élévation partielle simplifiée d'un ouvrant électrique du type à câble crémaillère conforme à l'invention.
- La figure 2 est une vue en élévation partielle simplifiée d'un ouvrant constitué par un lève-vitre électrique selon l'invention, du type à câble Bowden.
- Les figures 3, 4, 5, 6, sont des vues en élévation de quatre formes de réalisation du dispositif électromécanique de sécurité selon l'invention.
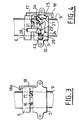
- La figure 7 est une vue en coupe partielle suivant 9/9 de la Fig.6.
- La figure 8 est une vue en élévation analogue aux Fig.1 à 6 d'une cinquième forme de réalisation du dispositif de sécurité selon l'invention.
- Les figures 9, 10, 11 et 12 sont des schémas électriques illustrant quatre formes d'exécution possibles du circuit électrique d'alimentation des dispositifs de sécurité représentés aux Fig.1 à 8.
- L'ouvrant électrique 1 représenté à la Fig.1 est un lève-vitre du type à câble crémaillère 2 coulissant dans une gaine 3. Le câble 2 engrène avec un pignon 4 de sortie d'un moto-réducteur 5. Au câble crémaillère 3 est fixé un chariot menant 6 relié à un chariot mené 7 supportant une vitre 8, les deux chariots 6 et 7 pouvant coulisser le long d'un rail 9 de guidage.
- Ces chariots sont reliés par des moyens électromécaniques d'accouplement et de détection d'effort entre les deux chariots, dont plusieurs formes de réalisation seront décrites ci-après en référence aux Fig.3 à 15.
- Le lève-vitre 11 représenté à la Fig.2 est du type à câble Bowden 12 enroulé autour de poulies 13 de renvoi et d'un tambour 14 solidaire de la roue dentée 15 du moto-réducteur 5. Au câble 12 est fixé le chariot 6, mécaniquement lié au chariot 7 supportant la vitre 8 par des moyens électromécaniques d'accouplement et de détection d'effort entre les deux chariots, selon l'un des modes de réalisation qui seront décrits ci-après.
- La Fig.3 illustre le schéma de fonctionnement le plus simple et le plus général de l'invention : les deux chariots 6, 7 sont accouplés par un élément élastique 16 précontraint de traction, constitué dans l'exemple représenté par un ressort hélicoïdal, et l'un des chariots, par exemple le chariot 6, est muni d'un interrupteur électrique 17 disposé en vis-à-vis du second chariot 7 de manière à pouvoir coopérer avec celui-ci. En raison de l'interposition du ressort 16 entre eux, les deux chariots 6, 7 sont distants d'un intervalle correspondant, mis à profit pour y disposer l'interrupteur 17. Des moyens de limitation du déplacement relatif des chariots 6, 7 sont prévus, par exemple comme représenté, un crochet 18 fixé à l'un des chariots (7 sur la Fig.3). Le crochet 18 s'étend le long de l'autre chariot 6 et son extrémité recourbée 18a permet de limiter le débattement entre les deux chariots.
- Si l'effort sur l'organe mobile porté par le chariot 7 augmente par suite de l'interposition d'un obstacle à la fermeture, le câble 2 ou 12 tend à tirer le chariot 6 vers le haut, tandis que l'effort sur l'organe mobile tend à pousser le chariot 7 vers le bas, le ressort 16 retenant les deux chariots entre eux. Un accroissement de l'effort sur l'organe mobile, donc entre les deux chariots 6, 7, provoque un allongement corrélatif du ressort 16. Tant que cet allongement ne dépasse pas une certaine limite, l'interrupteur 17 est dans un état déterminé : sur la Fig.3 il est en position poussée ou position départ. Au delà de cette limite, un effort supplémentaire, donc un allongement supplémentaire du ressort 16, libère suffisamment l'interrupteur 17 pour qu'il change d'état. Il suffit alors de disposer d'un circuit d'alimentation du moteur du moto-réducteur 5 qui, dans le cas où l'interrupteur 17 change d'état, inverse le sens de rotation du moteur et fait donc descendre l'organe mobile jusqu'au niveau voulu pour libérer l'obstacle.
- Les Fig.9 et 10 montrent des exemples de circuit électriques d'alimentation appropriés, dits "à mémoire électrique". Il s'agit d'un circuit usuel de commande de lève-vitre (ou de toit ouvrant) connu en soi, comprenant un bouton 19 de montée/descente, alimenté par une batterie 21, et auquel se combinent deux relais 22, 23 d'inversion du sens de marche, commandés par l'interrupteur 17 de pesage et relié au moteur 5a du moto-réducteur 5. Dans ce genre de circuit, il suffit de maintenir l'interrupteur de pesage 17 juste le temps nécessaire pour basculer les relais. Ensuite, même si l'interrupteur 17 est relâché, les relais restent par un système d'autoalimentation dans cette position de détection et assurant la descente de la vitre jusqu'au point de réarmement. Ce circuit d'alimentation étant bien connu en soi, ne nécessite pas de description plus détaillée.
- Le système de maintien des relais 22, 23 est alimenté tant que la pression sur le bouton 19 de commande est maintenue.
- Le circuit d'alimentation de la Fig.10 est une autre réalisation usuelle d'un circuit de commande, et ne diffère du circuit de la Fig.9 que par le fait qu'on amène continuellement le + et le - de la batterie 21 aux inverseurs des relais 22. L'alimentation du système de sécurité est donc indépendante de la position du bouton 19 de commande, de sorte qu'après la détection l'organe mobile descend, même après que le bouton 19 ait été relâché, et ce jusqu'à un point de réarmement. Le circuit de la Fig.10 est donc à mémoire électrique avec auto-alimentation.
- Le dispositif de sécurité de la Fig.4 comprend des moyens d'accouplement des deux chariots 6, 7 comportant un système à deux cliquets 24, 25 articulés sur des axes respectifs 26, 27 fixés à l'un des chariots, à savoir le chariot 7 dans l'exemple décrit. Ce dispositif d'accouplement comprend également un doigt 28 solidaire du chariot 6, portant un ergot terminal 29 engagé dans un bec 31 du cliquet 24, et un ressort 32 dont une extrémité est fixée en 33 au chariot 7 tandis que son extrémité est attachée en 34 au second cliquet 27. Ce dernier est ainsi sollicité élastiquement par le ressort 32, en appui contre le premier cliquet 24, de telle manière que le doigt 29 soit maintenu encliqueté dans le premier cliquet 24 tant que l'effort transmis au doigt 29 par le cliquet 24 reste inférieur à une valeur prédéterminée. L'un des chariots 6, 7, à savoir le chariot 6 dans l'exemple décrit, est équipé d'un interrupteur électrique 17, qui occupe l'intervalle entre les deux chariots et coopère avec le chariot 7 de façon à changer d'état lorsque l'effort précité dépasse ladite valeur prédéterminée et que le doigt 29 se dégage du cliquet 24.
- L'interrupteur 17 fait partie d'un circuit électrique d'alimentation du moteur du moto-réducteur 5, qui peut être soit le circuit de la Fig.11 soit celui de la Fig.12, comme pour la sécurité illustrée à la Fig.3.
- La forme de réalisation du dispositif de sécurité illustré à la Fig.5 comprend, comme moyen d'accouplement entre les chariots 6, 7, un aimant 35 fixé à l'un des chariots et collé à une plaque ferromagnétique non représentée, fixée à l'autre chariot. Un interrupteur 17 est fixé à l'un des chariots 6, 7 dans leur intervalle de séparation, et fait partie d'un circuit d'alimentation électrique selon la Fig.11 ou la Fig.12.
- Le chariot 7 porte un crochet 18 de limitation du débattement entre les deux chariots, analogue à celui de la Fig.3.
- La force d'attraction de l'aimant 35 maintient les deux chariots 6, 7 assemblés tant que l'effort subi par le chariot 7 portant l'organe mobile à déplacer reste inférieur à la force d'attraction de l'aimant 35. Lorsque cet effort dépasse ladite force d'attraction, les deux chariots 6, 7 se séparent, l'interrupteur 17 change d'état et le circuit d'alimentation électrique commande l'inversion du sens de rotation du moteur 5a.
- Les dispositifs de sécurité qui viennent d'être décrits en référence aux Fig.3 à 5 sont dits à mémoire électrique, car pour ces modes de réalisation il convient de prévoir un schéma électrique capable de garder en mémoire l'information que le système a déclenchée, et donc de réagir en conséquence même quand l'effort a disparu, pour déplacer l'organe mobile (par exemple la vitre) à un endroit donné, par exemple la position basse pour être sûr que l'obstacle a été libéré complètement.
- On décrira maintenant en référence aux Fig.6 à 8 deux autres formes de réalisations de la sécurité selon l'invention, dans lesquelles celle-ci a une mémoire "mécanique". Ceci signifie que même quant l'effort n'est plus supérieur à la limite prédéterminée, par exemple après l'intervention du système de sécurité et donc l'inversion du mouvement de l'organe mobile, le système garde en mémoire le fait que le phénomène du dépassement de l'effort a eu lieu. La position de débrayage reste alors jusqu'au moment où l'on va délibérément réarmer le dispositif, donc le remettre en position de départ.
- Les Fig.6 et 7 montrent une sécurité dans laquelle les moyens d'accouplement des chariots 6, 7 comprennent un ressort 48 de traction reliant les chariots 6, 7. L'un de ceux-ci, par exemple le chariot 7 portant l'organe mobile, est pourvu d'un aimant 49 déplaçable entre deux positons stables par des moyens d'entraînement et de guidage portés par le chariot 6. L'aimant peut se déplacer entre deux plaques 51, 52 de matériau ferromagnétique fixées sur le chariot 7, à un écartement l'une de l'autre approprié de part et d'autre de l'élément 49.
- Les moyens d'entraînement et de guidage de l'aimant 49 comprennent, dans l'exemple représenté, un doigt 53 saillant du chariot 6, s'étendant en vis-à-vis de l'aimant 49, lequel est muni d'une tige 54 pouvant coulisser dans une fente 55 de guidage ménagée dans le doigt 54. Les deux positions stables de l'aimant 49 sont celles où il est collé à l'une ou l'autre des deux plaques 51 et 52. L'aimant 49 coopère de plus avec un interrupteur électrique 56 qui peut prendre deux états correspondant chacun à l'une des positions stables de l'aimant 49 : la première position stable étant celle où les deux chariots 6, 7 sont accouplés comme représenté à la Fig.8, et sa seconde position stable étant celle où ils restent accouplés, mais plus éloignés l'un de l'autre, après détection d'un effort supérieur à une valeur prédéterminée. L'interrupteur 56 fait partie d'un circuit électrique d'alimentation capable d'inverser le sens de rotation du moteur du moto-réducteur lorsque l'interrupteur 56 change d'état. Ce changement d'état est lui même provoqué par le déplacement de l'aimant 49 de sa position collée contre la plaque inférieure 52 jusqu'à sa position collée à la plaque supérieure 51. Dans sa position collée à la plaque 52 (position initiale), l'aimant pousse la tige de l'interrupteur 56, tandis que dans sa position où il est collé à la plaque 51, le contact entre l'aimant 49 et l'interrupteur 56 est interrompu.
- La position de l'interrupteur 56 informe donc dans quel état se trouve le système de sécurité.
- Le ressort de traction 48 est précontraint et assure l'accouplement des deux chariots 6, 7. Le dispositif va basculer de sa position initiale, représentée à la Fig.6, dans sa position de détection si l'allongement du ressort 48 est suffisant pour que la tige 54 de l'aimant 49 soit entraînée dans le mouvement de montée par le chariot 6, et plus précisément par le doigt 53, la tige 54 venant alors en butée à l'extrémité inférieure de la fente 55. Cette dernière a pour fonction d'autoriser un certain débattement libre du chariot 6 par rapport au chariot 7. Ainsi, dès que l'effort sur l'organe mobile (vitre ou toit ouvrant), dépasse une certaine limite prédéterminée, la tige 54 est entraînée par le chariot 6 et l'aimant 49, qui était collé contre la plaque 52, va venir se coller contre la plaque 51. En même temps l'aimant 49 libère l'interrupteur 56 qui change d'état. A partir de ce moment, le circuit électrique d'alimentation, dont fait partie l'interrupteur 56, et qui peut être soit celui de la Fig.11, soit celui de la Fig.12, va inverser le sens de rotation du moteur du moto-réducteur 5. Le chariot 6 va donc être poussé vers le bas, tandis que la fente 55 permet à l'aimant 49 de rester dans sa position de détection, collé à la plaque 51, malgré le renversement du sens du mouvement.
- La Fig.11 représente un circuit usuel de commande d'ouvrant électrique comprenant comme les circuits des Fig.9 et 10, un bouton de commande 19 alimenté par la batterie 21, et deux relais 22, 23. Ce circuit ne nécessite donc pas de description détaillée. Tant que l'interrupteur de pesage 56 est en position de détection, les bobines 23 d'excitation des relais 22 sont alimentées, la descente se poursuivant sans qu'on ait besoin de maintenir la pression sur le bouton de commande 19. En effet, une fois la détection faite par le changement d'état de l'interrupteur 56 provoqué par le déplacement de l'aimant 49, l'interrupteur 56 reste dans son nouvel état jusqu'au moment où on "réarme volontairement" le système. Par conséquent le circuit électrique maintient l'interrupteur 56 dans sa position après la détection, même après le renversement du mouvement et donc suppression de l'effort.
- Le circuit de la Fig.12 est similaire à celui de la Fig.11, mais il est de plus équipé d'un pont 57 de diodes qui alimente les relais 22, 23. Si on cesse d'appuyer sur le bouton 19, le système s'arrête et l'organe mobile cesse de descendre, car les bornes + des relais 22 ne sont plus alimentées, compte tenu de la disposition des diodes du pont 57. Comme les circuits électriques précédents, le circuit de la Fig.12 est connu en soi et ne nécessite donc pas de description détaillée.
- Les circuits des Fig.11 et 12 sont à mémoire mécanique, donc non autoalimentés.
- Dans la forme de réalisation de la sécurité de la Fig.8, l'accouplement des deux chariots 6, 7 est assuré par un ressort 58 précontraint de traction et l'un des deux chariots, par exemple le chariot 7, est équipé d'une pièce 59 articulée autour d'un axe 61. La pièce 59 coopère avec un interrupteur électrique 56 et est sollicitée par un ressort 62, dont une extrémité est fixée au chariot 7, vers une position correspondant à un premier état de l'interrupteur 56. Le chariot 6 est muni d'un doigt 70 dont l'extrémité coopère avec la pièce 59 afin de maintenir cette dernière, contre la force de rappel du ressort 62, dans une position angulaire correspondant au second état de l'interrupteur 56, comme représenté à la Fig.8. Le maintien de la pièce 59 et de l'interrupteur 56 dans cet état est assuré tant que l'élément élastique 58 ne subit pas un allongement supérieur à celui correspondant à une valeur prédéterminée. L'interrupteur 56 fait partie d'un circuit d'alimentation du motoréducteur 5 capable d'inverser le sens de rotation de celui-ci lorsque l'interrupteur 56 change d'état, afin de libérer l'organe mobile. Ce circuit électrique peut être soit celui de la Fig.11 soit celui de la Fig.12.
- Ainsi, si les deux chariots 6, 7 s'éloignent d'une distance trop grande consécutivement à un allongement du ressort 58 lui même provoqué par l'interposition d'un obstacle entre l'organe mobile et le cadre qui l'entoure, la pièce 59 va être libérée de tout contact avec le doigt 70 qui s'escamote et donc va pivoter autour de l'axe 61 en libérant l'interrupteur 56. Ce dernier change d'état et le système électrique de la Fig.11 ou de la Fig.12 inverse le sens de rotation du moteur.
- Les réalisations de la sécurité à une seule position stable (Fig.3 à 5) n'ont pas de mémoire mécanique car elles n'ont qu'une seule position stable, et doivent donc être associées aux circuits des Fig.9 et 10. Les réalisations des Fig.6 à 8 ont deux positions stables, donc une mémoire mécanique, et sont de ce fait associées aux circuits des Fig.11 ou 12, non autoalimentés.
- Dans les divers modes de réalisation de l'invention, les interrupteurs et leurs circuits de commande constituent une boucle de courant ("fail safe"), qui permet de s'assurer que le circuit fonctionne correctement, et peuvent mettre le système en sécurité.
- Par ailleurs, les différents ressorts utilisés, par exemple 16 sur la Fig.3, 48 sur la Fig.6... sont précontraints, contrairement aux ressorts des documents antérieurs précités (par exemple celui du FR-A 2.461.085). Ils peuvent ainsi se libérer à partir du seuil d'effort avec une extrême sensibilité, ce qui constitue un avantage appréciable par rapport aux dispositifs antérieurs connus.
- L'invention est susceptible de diverses variantes d'exécution. Ainsi il est évident notamment que la disposition relative des éléments d'accouplement et de détection d'effort sur les chariots 6 et 7 peut être inversée par rapport à celles représentées. De même un seul cliquet convenablement agencé peut remplacer les deux cliquets 24 et 25 de la Fig.4.
- Dans les divers modes de réalisation de l'invention, le système de sécurité présente l'avantage d'être de fabrication relativement simple et donc peu onéreuse.
Claims (8)
- Ouvrant électrique de véhicule, comprenant un moteur (5 a), un organe mobile (8) pouvant être entraîné par un câble, une chaîne cinématique d'entraînement du câble, et un dispositif de sécurité comportant des moyens électromécaniques (16, 17...; 24, 25, 28, 17...) d'accouplement et de détection d'effort entre un premier élément menant (6) de ladite chaîne et un second élément mené (7) supportant l'organe mobile, ces moyens étant agencés de manière à désaccoupler automatiquement les deux éléments menant et mené l'un de l'autre en cas de détection d'un effort dépassant une valeur prédéterminée, s'opposant à la course de l'organe mobile, caractérisé en ce que les moyens électromécaniques d'accouplement et de détection d'effort (16, 17, 22, 23..) sont réalisés entre un premier chariot menant (6) solidaire du câble (9) et un second chariot mené (7) solidaire de l'organe mobile, ces moyens étant agencés de manière à désaccoupler automatiquement les deux chariots l'un de l'autre en cas de détection dudit effort dépassant une valeur prédéterminée.
- Ouvrant électrique selon la revendication 1, caractérisé en ce que les deux chariots (6, 7) sont accouplés par un élément élastique (16) précontraint de traction et l'un (6) des chariots est muni d'un interrupteur électrique (17) associé au second chariot (7), de façon à changer d'état lorsque l'effort précité dépasse ladite valeur prédéterminée et que l'élément élastique subit un allongement correspondant à l'écartement entre les chariots, et l'interrupteur fait partie d'un circuit électrique d'alimentation du moteur, capable d'inverser le sens de rotation du moteur lorsque l'interrupteur change d'état, afin de libérer l'organe mobile (Fig.3).
- Ouvrant électrique selon la revendication 1, caractérisé en ce que lesdits moyens d'accouplement comportent un système à deux cliquets (24, 25) articulés sur des axes respectifs (26, 27) fixés à l'un (7) des chariots (6, 7), un doigt (28) solidaire de l'autre chariot (6), engagé dans un bec (31) d'un premier cliquet (24), un ressort (32) dont une extrémité est fixée au chariot portant les cliquets et l'autre au second cliquet (25), qu'il sollicite en appui contre le premier cliquet (24) de telle manière que le doigt soit maintenu encliqueté dans le premier cliquet tant que l'effort transmis au doigt par le premier cliquet reste inférieur à ladite valeur prédéterminée, et l'un (6) des chariots est équipé d'un interrupteur électrique (17) associé au second chariot (7) de façon à changer d'état lorsque l'effort précité dépasse ladite valeur prédéterminée et que le doigt se dégage du système à cliquets, l'interrupteur faisant partie d'un circuit électrique d'alimentation du moteur capable d'inverser le sens de rotation du moteur lorsque l'interrupteur change d'état, afin de libérer l'organe mobile (Fig.4).
- Ouvrant électrique selon la revendication 1, caractérisé en ce que les moyens d'accouplement comprennent un aimant (35) placé entre les armatures fixées aux chariots (6, 7), dont la force d'attraction maintient les deux chariots assemblés tandis que les moyens de détection d'effort comprennent un interrupteur électrique (17) porté par l'un (6) des chariots et associé au second chariot de façon à changer d'état lorsque l'effort précité dépasse ladite valeur prédéterminée, l'interrupteur faisant partie d'un circuit électrique d'alimentation du moteur capable d'inverser le sens de rotation du moteur lorsque l'interrupteur change d'état, afin de libérer l'organe mobile (Fig.5).
- Ouvrant électrique selon la revendication 1, caractérisé en ce que les moyens d'accouplement comprennent un élément élastique (48) précontraint de traction reliant les deux chariots (6, 7) et l'un (7) des chariots est pourvu d'un aimant (49) déplaçable entre deux positions stables par des moyens d'entraînement et de guidage (53, 55) portés par l'autre chariot (6), cet aimant coopérant avec un interrupteur électrique (56) qui peut prendre deux états correspondant chacun à l'une des positions stables de l'aimant, la première position stable étant celle où les deux chariots (6, 7) sont accouplés et la seconde position stable étant celle où ils sont désaccouplés après détection d'un effort supérieur à ladite valeur prédéterminée, l'interrupteur faisant partie d'un circuit d'alimentation du moteur (5a) capable d'inverser le sens de rotation du moteur lorsque l'interrupteur (56) change d'état, afin de libérer l'organe mobile (Fig. 6-7).
- Ouvrant électrique selon la revendication 5, caractérisé en ce que les moyens d'entraînement et de guidage de l'aimant (35) comportent un doigt (53) saillant de l'un (6) des chariots (6, 7), s'étendant en vis-à-vis de l'aimant qui est muni d'une tige (54) coulissant dans une fente (55) de guidage ménagée dans le doigt, et les positions stables de l'aimant sont déterminées par deux plaques (51, 52) de matériau ferromagnétique fixées sur le chariot (7) portant l'aimant, à un écartement approprié de part et d'autre de ce dernier (Fig.6-7).
- Ouvrant électrique selon la revendication 1, caractérisé en ce que les moyens d'accouplement comprennent un élément élastique (58) précontraint de traction reliant les deux chariots (6, 7) et l'un (7) des chariots est équipé d'une pièce (59) articulée sur ce chariot, coopérant avec un interrupteur électrique (56) et sollicitée par un ressort (62) vers une position correspondant à un premier état de l'interrupteur, et le second chariot (6) est muni d'un doigt (70) coopérant avec ladite pièce articulée afin de maintenir cette dernière contre la force de rappel du ressort, dans une position angulaire correspondant au second état de l'interrupteur tant que l'élément élastique ne subit pas un allongement supérieur à celui correspondant à ladite valeur prédéterminée, l'interrupteur faisant partie d'un circuit électrique d'alimentation du moteur (5a) capable d'inverser le sens de rotation du moteur lorsque l'interrupteur change d'état, afin de libérer l'organe mobile (Fig.8).
- Ouvrant électrique selon l'une quelconque des revendication 1 à 4, caractérisé en ce que des moyens de limitation du déplacement relatif des chariots (6, 7) sont prévus, par exemple un crochet (18) fixé à l'un des chariots et qui s'étend le long de l'autre chariot afin de limiter son débattement par rapport au chariot portant le crochet.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP96105244A EP0724279B1 (fr) | 1992-07-10 | 1993-06-24 | Lève-vitre de véhicule à bras oscillant et secteur denté |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR9208620 | 1992-07-10 | ||
| FR929208620A FR2693589B1 (fr) | 1992-07-10 | 1992-07-10 | Dispositif de sécurité pour ouvrants électriques de véhicule, du type à câble d'entraînement d'un organe mobile, notamment lèvre-vitre et toits ouvrants. |
Related Child Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP96105244A Division EP0724279B1 (fr) | 1992-07-10 | 1993-06-24 | Lève-vitre de véhicule à bras oscillant et secteur denté |
| EP96105244.6 Division-Into | 1993-06-24 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0578529A1 EP0578529A1 (fr) | 1994-01-12 |
| EP0578529B1 true EP0578529B1 (fr) | 1997-03-12 |
Family
ID=9431817
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP93401628A Expired - Lifetime EP0578529B1 (fr) | 1992-07-10 | 1993-06-24 | Dispositif de sécurité pour ouvrants électriques véhicule, du type à câble d'entraînement d'un organe mobile, notamment lève-vitre et toits ouvrants |
| EP96105244A Expired - Lifetime EP0724279B1 (fr) | 1992-07-10 | 1993-06-24 | Lève-vitre de véhicule à bras oscillant et secteur denté |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP96105244A Expired - Lifetime EP0724279B1 (fr) | 1992-07-10 | 1993-06-24 | Lève-vitre de véhicule à bras oscillant et secteur denté |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US5461826A (fr) |
| EP (2) | EP0578529B1 (fr) |
| JP (1) | JPH06167167A (fr) |
| BR (1) | BR9302821A (fr) |
| CA (1) | CA2100120A1 (fr) |
| DE (2) | DE69323778T2 (fr) |
| FR (1) | FR2693589B1 (fr) |
| MX (1) | MX9304139A (fr) |
Families Citing this family (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT1273093B (it) * | 1994-03-30 | 1997-07-04 | Capricorno Srl | Dispositivo di sicurezza per finestrini elettrici di autoveicoli |
| DE4420008C1 (de) * | 1994-06-08 | 1995-05-24 | Ford Werke Ag | Seilzug-Fensterheber, insbesondere für Kraftfahrzeuge |
| US5595025A (en) * | 1995-05-01 | 1997-01-21 | Excel Industries, Inc. | Window regulator assembly |
| DE19618853C1 (de) * | 1996-05-10 | 1997-08-14 | Brose Fahrzeugteile | Motorisch angetriebener Fensterheber mit elektronischem Einklemmschutz für ein Kraftfahrzeug |
| GB2319805A (en) * | 1996-11-29 | 1998-06-03 | Btr Sealing Systems | Safety system for automotive window moving systems |
| FR2765613B1 (fr) * | 1997-07-04 | 1999-09-17 | Rockwell Lvs | Leve-vitre electrique pour vehicule automobile pourvu d'un systeme anti-pincement |
| US5960849A (en) * | 1997-08-13 | 1999-10-05 | Gmi Holdings, Inc. | Cable slack detector |
| US6243022B1 (en) | 1998-09-09 | 2001-06-05 | Honda Giken Kogyo Kabushiki Kaisha | Remote control device using two-way communication for a vehicle opening system |
| JP3931453B2 (ja) * | 1998-11-06 | 2007-06-13 | アイシン精機株式会社 | 車両用スライドドアの窓部開閉装置 |
| US6051945A (en) * | 1999-01-25 | 2000-04-18 | Honda Giken Kogyo Kabushiki Kaisha | Anti-pinch safety system for vehicle closure device |
| EP1098335B1 (fr) * | 1999-11-02 | 2006-07-12 | Hans-Peter Löffler | Capteur pour un couplage par friction utilisant un détecteur de seuil |
| US6922031B2 (en) * | 2003-06-17 | 2005-07-26 | Arvinmeritor Technology, Llc | Door actuation system with helical cable |
| US20050093330A1 (en) * | 2003-11-04 | 2005-05-05 | Hoffman Lawrence A. | Power drives |
| JP4573887B2 (ja) * | 2008-08-08 | 2010-11-04 | 三井金属鉱業株式会社 | ウィンドウレギュレータ |
| US8069611B2 (en) * | 2009-05-12 | 2011-12-06 | Honda Motor Co., Ltd. | Door pane position sensor assembly |
| US20130219794A1 (en) * | 2010-11-08 | 2013-08-29 | Yachiyo Industry Co., Ltd. | Window regulator |
| CN103201447B (zh) * | 2010-11-08 | 2015-04-22 | 八千代工业株式会社 | 车窗升降器 |
| CN114607231A (zh) * | 2017-03-31 | 2022-06-10 | 株式会社本田阿克塞斯 | 车辆用门开闭装置 |
| CN108756572B (zh) * | 2018-06-27 | 2020-07-03 | 温州如剑环保科技有限公司 | 一种汽车车窗用防夹装置 |
| CN111270943A (zh) * | 2020-02-14 | 2020-06-12 | 蒋利群 | 一种左右推拉窗的智能开窗机器人 |
| CN113044687B (zh) * | 2021-01-28 | 2022-09-20 | 艾陌极智能装备(深圳)有限公司 | 一种具有刹止功能的吊篮钢丝绳破损检测装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2044712A (en) * | 1933-07-27 | 1936-06-16 | Monroe John Edgar | Automatic overload release clutch |
| US2130764A (en) * | 1937-09-30 | 1938-09-20 | Nat Pneumatic Co | Combined motor mechanism and control switch therefor |
| US2649300A (en) * | 1947-12-26 | 1953-08-18 | Electric Auto Lite Co | Window lifting mechanism |
| US2817512A (en) * | 1955-03-10 | 1957-12-24 | Gen Motors Corp | Window regulator safety device |
| US2883183A (en) * | 1958-04-21 | 1959-04-21 | Gen Motors Corp | Vehicle window actuators |
| DE1630492A1 (de) * | 1967-08-16 | 1971-05-13 | Fichtel & Sachs Ag | Getriebe,insbesondere fuer Schiebedaecher,Fensterheber od.dgl. von Kraftfahrzeugen |
| BE727619A (fr) * | 1969-01-29 | 1969-07-01 | ||
| DE2028195A1 (de) * | 1970-06-09 | 1971-12-16 | Dr Ing h c F Porsche KG, 7000 Stuttgart Zuffenhausen | Schaltvorrichtung für elektrisch be tatigte Fensterscheiben von Fahrzeugen, insbesondere von Kraftfahrzeugen |
| GB2107387B (en) * | 1979-07-04 | 1984-08-01 | Firmaframe Nominees Pty Ltd | Improved mechanism for stopping the drive or reversing the drive of motors of roller shutter doors |
| DE2928315C2 (de) * | 1979-07-13 | 1986-06-26 | Gebr. Bode & Co, 3500 Kassel | Einklemmsicherung für eine durch eine Drehsäule betätigte Fahrzeugtür |
| DE3215203A1 (de) * | 1982-04-23 | 1983-10-27 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V., 8000 München | Fensterheber, insbesondere fuer kraftfahrzeuge |
-
1992
- 1992-07-10 FR FR929208620A patent/FR2693589B1/fr not_active Expired - Fee Related
-
1993
- 1993-06-24 DE DE69323778T patent/DE69323778T2/de not_active Expired - Fee Related
- 1993-06-24 DE DE69308660T patent/DE69308660T2/de not_active Expired - Fee Related
- 1993-06-24 EP EP93401628A patent/EP0578529B1/fr not_active Expired - Lifetime
- 1993-06-24 EP EP96105244A patent/EP0724279B1/fr not_active Expired - Lifetime
- 1993-07-02 US US08/087,835 patent/US5461826A/en not_active Expired - Fee Related
- 1993-07-08 CA CA002100120A patent/CA2100120A1/fr not_active Abandoned
- 1993-07-09 MX MX9304139A patent/MX9304139A/es unknown
- 1993-07-09 BR BR9302821A patent/BR9302821A/pt not_active Application Discontinuation
- 1993-07-12 JP JP5171562A patent/JPH06167167A/ja active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| EP0724279A2 (fr) | 1996-07-31 |
| BR9302821A (pt) | 1994-02-22 |
| JPH06167167A (ja) | 1994-06-14 |
| EP0724279A3 (fr) | 1996-10-16 |
| FR2693589B1 (fr) | 1994-09-30 |
| CA2100120A1 (fr) | 1994-01-11 |
| EP0578529A1 (fr) | 1994-01-12 |
| EP0724279B1 (fr) | 1999-03-03 |
| FR2693589A1 (fr) | 1994-01-14 |
| MX9304139A (es) | 1994-04-29 |
| DE69323778T2 (de) | 1999-07-29 |
| US5461826A (en) | 1995-10-31 |
| DE69308660T2 (de) | 1997-11-13 |
| DE69308660D1 (de) | 1997-04-17 |
| DE69323778D1 (de) | 1999-04-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0578529B1 (fr) | Dispositif de sécurité pour ouvrants électriques véhicule, du type à câble d'entraînement d'un organe mobile, notamment lève-vitre et toits ouvrants | |
| EP0300840B1 (fr) | Dispositif de condamnation anti-vol et anti-agression de l'actionnement d'une serrure pour porte, et serrure associée à ce dispositif | |
| EP2616616B1 (fr) | Poignee d'ouvrant de vehicule comprenant une masse inertielle et un fusible | |
| EP3581742B1 (fr) | Poignée de porte affleurante et son procédé de fonctionnement | |
| FR2746718A1 (fr) | Vehicule automobile avec au moins une porte coulissante montee dans une paroi laterale | |
| EP0057338B1 (fr) | Boîtier de commande pour moteur d'entraînement de panneau coulissant d'un véhicule, notamment pour lève-glace | |
| CH688006A5 (fr) | Dispositif de manoeuvre d'un élément de fermeture se déplacant au moins approximativement verticalement. | |
| EP0581623B1 (fr) | Dispositif de sécurité pour lève-vitre électrique à cable de véhicule | |
| EP1621712A1 (fr) | Système anti-pincement | |
| EP0578534A1 (fr) | Dispositif de sécurité pour ouvrants électriques de véhicule, notamment lève-vitre et toits ouvrants, et ouvrant incorporant ce dispositif | |
| EP0159238B1 (fr) | Dispositif électromécanique de commande de l'ouverture d'une serrure et serrure de portière de véhicule automobile comportant un tel dispositif | |
| EP0579518B1 (fr) | Lève-vitre électrique de véhicule du type à câble coulissant le long d'un rail de guidage | |
| WO1999001637A1 (fr) | Leve-vitre electrique pour vehicule automobile pourvu d'un systeme anti-pincement | |
| EP0032073B1 (fr) | Installation de sécurité pour ascenseurs | |
| EP0819204B1 (fr) | Porte de manutention avec systeme de securite | |
| EP1724428B1 (fr) | Mécanisme de commande automatique d'une porte coulissante légère équipée d'au moins un vantail mobile | |
| FR2847612A1 (fr) | Dispositif d'entrainement motorise d'un dispositif d'obtutation, tel qu'une porte coulissante, d'une baie menagee dans un vehicule, portiere et vehicule correspondants | |
| EP0102263B1 (fr) | Serrure à commande électrique pour portière de véhicule automobile | |
| EP1093947B1 (fr) | Store à enrouler motorisé, à moyens de solidarisation sélective du tube d'enroulement aux moyens de motorisation | |
| FR2873150A1 (fr) | Mecanisme de commande automatique d'une porte coulissante equipee d'au moins un vantail mobile | |
| EP1612360A1 (fr) | Dispositif de commande d'une baie coulissante motorisée, notamment pour une cabine de conduite d'un matériel ferroviaire ou similaire | |
| FR3007571A1 (fr) | Actionneur electromecanique et procede d'utilisation de cet actionneur electromecanique | |
| EP1383980A2 (fr) | Ensemble autonome motorise d'entrainement d'un portail coulissant | |
| FR2855545A1 (fr) | Dispositif de verrouillage d'un ouvrant de vehicule | |
| FR2494242A2 (fr) | Installation de securite pour ascenseurs |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): DE ES FR GB IT SE |
|
| 17P | Request for examination filed |
Effective date: 19940630 |
|
| 17Q | First examination report despatched |
Effective date: 19951030 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: ROCKWELL LIGHT VEHICLE SYSTEMS - FRANCE, EN ABREGE |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| ITF | It: translation for a ep patent filed |
Owner name: BARZANO' E ZANARDO ROMA S.P.A. |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): DE ES FR GB IT SE |
|
| DX | Miscellaneous (deleted) | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 19970312 |
|
| REF | Corresponds to: |
Ref document number: 69308660 Country of ref document: DE Date of ref document: 19970417 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 19970513 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19970612 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19970624 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19970624 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19980303 |
|
| 26N | No opposition filed | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20010621 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030228 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20050624 |