-
HINTERGRUND DER ERFINDUNG
-
GEBIET DER ERFINDUNG
-
Die vorliegende Erfindung bezieht sich auf ein Verfahren zum Schätzen einer Position (z. B. einer Magnetpolposition) eines Rotors bzw. Läufers bei einem Synchronmotor und eine Vorrichtung zum Steuern des Motors basierend auf der geschätzten Position.
-
BESCHREIBUNG DER VERWANDTEN TECHNIK
-
Aus Parasiliti, F; Petrella, R; Tursini, M „Speed sensorless control of an interior PM synchronous motor" in Industry Application Conference, 2002, 37th IAS Annual Meeting, Conference Record of the Volume 1, 13-18 Oct. 2002, Pages: 657-664 ist ein Verfahren zum Schätzen einer Magnetpolposition eines Synchronmotors bekannt, bei welchem mittels eines Schätzers aus den Sollspannungen und den Istströmen die Magnetpolposition bestimmt wird.
-
Bei einem Synchronmotor, wie z. B. einem oberflächen-permanentmagnetischen Synchronmotor (SPMSM; SPMSM = Surface Permanent-Magnetic Synchronous Motor) oder einem innen-permanentmagnetischen Synchronmotor (IPMSM; IPSMS = Intemal Permanent-Magnetic Synchronous Motor), werden Permanentmagneten für einen Rotor verwendet, und S- und N-Magnetpole, die durch die Permanentmagneten gebildet sind, sind abwechselnd um eine Rotorwelle bzw. Rotorachse angeordnet. Während des Betriebs dieses Motors ist eine Wechselspannung an Wicklungen eines Stators bzw. Ständers angelegt, und ein Wechselstrom, der aus der angelegten Spannung erzeugt wird, fließt durch die Wicklungen. Eine Phase der Spannung wird synchron zu einer Position (z. B. einer Magnetpolposition) eines Rotors gesteuert. Ein Positionserfasser bzw. Positionsdetektor zum Erfassen der Magnetpolposition des Rotors ist daher erforderlich. Als dieser Detektor wird ein Hall-Element, ein Codierer oder ein Auflöser bzw. Drehmelder verwendet. Es ist jedoch schwierig, einen Motor mit einem Positionsdetektor zu verkleinern, und es ist erforderlich, den Detektor mit einer Steuerung zum Steuern des Motors durch Verbindungsleitungen zu verbinden.
-
Um einen Synchronmotor ohne ein Verwenden eines Positionsdetektors zu steuern, wurde daher in letzter Zeit eine Magnetpolposition eines Rotors in einem Motor unter Verwendung einer induzierten Spannung des Motors geschätzt. Während des Betriebs des Motors induziert der Motor selbst eine Spannung, die sich mit der Magnetpolposition ändert. Die Magnetpolposition kann daher aus der induzierten Spannung geschätzt werden. Die veröffentlichte japanische Patenterstveröffentlichung Nr.
JP 2001-251 889 A offenbart beispielsweise einen Motormodellausdruck bzw. eine Motormodellgleichung, der in einem dq-Drehkoordinatensystem mit einer d-Achse und einer q-Achse genähert ist, um eine Magnetpolposition basierend auf einer induzierten Spannung zu schätzen. Die d-Achse ist eingestellt, um von einem S-Magnetpol zu einem N-Magnetpol in einem Rotor gerichtet zu sein. Die q-Achse ist eingestellt, um zu der d-Achse auf einer Ebene senkrecht zu einer Drehachse des Rotors orthogonal zu sein. Ein Ursprungspunkt des Koordinatensystems ist auf der Drehachse platziert.
-
Bei der Schätzung unter Verwendung dieser Motormodellgleichung werden Vorrichtungsparameter, die auf konstante Werte eingestellt sind, zum Bilden einer Motormodellgleichung verwendet, und eine Wellenverschiebung bzw. Achsenverschiebung Δθ einer geschätzten Polposition von einer tatsächlichen Polposition (d. h. d-Achse) in einem Synchronmotor wird aus einer Komponente Idc (die im Folgenden d-Achsen-Komponente genannt ist) eines erfassten Gleichstroms entlang der d-Achse, einer Komponente iqc (die im Folgenden q-Achsen-Komponente genannt ist) des erfassten Gleichstroms entlang der q-Achse, einer d-Achsen-Komponente V*d einer Spannung, die an den Motor angelegt ist, einer q-Achsen-Komponente V*q der angelegten Spannung und einer Solldrehgeschwindigkeit ω*r des Rotors berechnet, Eine geschätzte Magnetpolposition des Rotors wird aus der Verschiebung Δθ berechnet.
-
Die Parameterwerte, die für einen tatsächlichen Motor geeignet sind, sind jedoch aufgrund verschiedener Ursachen variiert. Obwohl beispielsweise Motoren in einer Massenerzeugung hergestellt werden, unterscheiden sich Größen und Formen von Bestandteilen eines Motors von denselben anderer Motoren. Bei diesem Fall ist ein tatsächlicher Wert eines Parameters in einem Motor abhängig von den Größen und Formen von Teilen des Motors bestimmt. Die Parameterwerte, die für einen Motor geeignet sind, sind ferner variiert, wenn ein Magnetfeld in dem Motor gesättigt ist.
-
Um dieses Problem zu lösen, offenbart beispielsweise die veröffentlichte japanische Patenterstveröffentlichung Nr.
JP 2005-130 691 A eine Spannungsformel als ein Motormodellausdruck. Bei diesem Modell wird, um einen Fehler bei einer geschätzten Magnetpolposition zu minimieren, eine q-Achsen-Induktivität, die einer der Vorrichtungsparameter bezeichnet, erneuert, und eine geschätzte Magnetpolposition wird gemäß einem Motormodellausdruck unter Verwendung der erneuerten Induktivität bestimmt. Eine erste geschätzte Magnetpolposition wird insbesondere gemäß einem Motormodellausdruck unter Verwendung einer Sollspannung, die an einen Motor angelegt ist, eines Stroms, der von dem Motor erfasst wird, und einer änderbaren q-Achsen-Induktivität berechnet, und eine zweite geschätzte Magnetpolposition wird ohne Verwenden einer q-Achsen-Induktivität berechnet. Die q-Achsen-Induktivität wird basierend auf einer Differenz zwischen der ersten und der zweiten Position erneuert, und eine Magnetpolposition wird basierend auf der erneuerten Induktivität bei einem nächsten Schätzungszyklus geschätzt.
-
In dieser Veröffentlichung ist jedoch, da zwei geschätzte Positionen für jeden Schätzungszyklus berechnet werden, eine große Berechnungsmenge erforderlich, um eine Magnetpolposition korrekt zu schätzen.
-
ZUSAMMENFASSUNG DER ERFINDUNG
-
Die Aufgabe der vorliegenden Erfindung besteht darin, unter angemessener Berücksichtigung der Nachteile der herkömmlichen Schätzung einer Magnetpolposition ein Verfahren zu schaffen, bei dem eine Magnetpolposition eines Rotors in einem Motor gemäß einem Motormodellausdruck unter Verwendung eines korrigierten Parameters genau bestimmt wird, während eine Berechnungsmenge reduziert ist. Die Aufgabe besteht ferner darin, eine Vorrichtung zum Steuern eines Motors basierend auf der geschätzten Magnetpolposition zu schaffen.
-
Gemäß einem ersten Aspekt dieser Erfindung wird die Aufgabe durch die Schaffung eines Verfahrens zum Schätzen einer Magnetpolposition bei einem Synchronmotor mit ausgeprägten Polen bzw. Einzelpolen gelöst, das die Schritte des Vorsehens eines Motormodellausdrucks für ein Schätzen der Magnetpolposition aus einer Sollspannung, die an den Motor angelegt ist, einem Strom, der aus der Sollspannung erzeugt wird, und einem Parameter, der aus einer Gruppe bestehend aus Statorwiderstand, Drehgeschwindigkeit und q-Achsen Induktivität ausgewählt ist, und des Berechnens einer geschätzten Magnetpolposition in dem Motor aus der Sollspannung, dem erzeugten Strom und dem Parameter gemäß dem Motormodellausdruck aufweist. Der Schritt des Berechnens der geschätzten Magnetpolposition weist (1) das Anlegen einer Phasenanpassungsspannung, die eine höhere Frequenz als dieselbe der Sollspannung aufweist und eine Phasenanpassung mit der vorher erhaltenen Magnetpolposition aufweist, an den Motor, (2) das Erfassen eines Phasenanpassungsstroms, der aus der Phasenanpassungsspannung erzeugt wird, von dem Motor, (3) das Korrigieren eines Werts des Parameters, derart, dass eine Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom im Wesentlichen null ist, und (4) das Berechnen einer geschätzten Magnetpolposition aus der Sollspannung, dem erzeugten Strom und dem Parameter, der den korrigierten Wert aufweist, auf.
-
Da dementsprechend die Schätzung einer Magnetpolposition einmal pro Schätzungszyklus durchgeführt wird, kann eine Berechnungsmenge zum Schätzen einer Magnetpolposition reduziert werden. Da ferner der Parameter derart korrigiert wird, dass eine Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom im Wesentlichen null ist, kann sich die geschätzte Magnetpolposition zuverlässig einer tatsächlichen Magnetpolposition nähern.
-
Die Aufgabe wird ferner durch die Schaffung einer Vorrichtung zum Steuern eines Synchronmotors mit Einzelpolen bzw. ausgeprägten Polen gelöst, die eine Schätzeinheit, die eine Magnetpolposition in dem Motor aus einer Sollspannung, die an den Motor angelegt ist, einem Strom, der aus der Sollspannung erzeugt wird, und einem Parameter, der aus einer Gruppe bestehend aus Statorwiderstand, Drehgeschwindigkeit und q-Achsen Induktivität ausgewählt ist, schätzt, und eine Steuereinheit, die den Motor gemäß der geschätzten Magnetpolposition steuert, aufweist. Die Schätzeinheit weist (1) eine Anlegeeinheit, die eine Phasenanpassungsspannung, die eine höhere Frequenz als dieselbe der Sollspannung aufweist und eine Phasenanpassung mit der im Vorhergehenden erhaltenen geschätzten Magnetpolposition aufweist, an den Motor anlegt, (2) eine Erfassungseinheit, die einen Phasenanpassungsstrom, der aus der Phasenanpassungsspannung von dem Motor erzeugt wird, erfasst, (3) eine Korrigiereinheit, die einen Wert des Parameters derart korrigiert, dass eine Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom im Wesentlichen null ist, und (4) eine Berechnungseinheit, die eine geschätzte Magnetpolposition aus der Sollspannung, dem erfassten Strom und dem Parameter mit dem korrigierten Wert berechnet, auf. Die Steuereinheit steuert den Motor gemäß der geschätzten Magnetpolposition, die in der Berechnungseinheit berechnet wird.
-
Da eine Berechnungsmenge zum Schätzen einer Magnetpolposition reduziert ist, kann die Steuereinheit den Motor gemäß der geschätzten Magnetpolposition unverzüglich steuern. Teile, die für die Berechnung erforderlich sind, können ferner vereinfacht sein, derart, dass die Steuereinheit verkleinert werden kann.
-
Gemäß einem zweiten Aspekt dieser Erfindung wird die Aufgabe durch die Schaffung eines Verfahrens zum Schätzen einer Magnetpolposition eines Rotors bei einem Synchronmotor gelöst, das die Schritte des Vorsehens eines Motormodellausdrucks zum Schätzen der Magnetpolposition aus einer Sollspannung, die aus einer Solldrehgeschwindigkeit des Rotors bestimmt wird und an den Motor angelegt ist, einem Strom, der aus der Sollspannung erzeugt wird, und einem Parameter, der aus einer Gruppe bestehend aus Statorwiderstand, Drehgeschwindigkeit und q-Achsen Induktivität ausgewählt ist, und des Berechnens einer geschätzten Magnetpolposition in dem Motor aus der Sollspannung, dem erzeugten Strom und dem Parameter gemäß dem Motormadellausdruck aufweist. Der Schritt des Berechnens der geschätzten Magnetpolposition weist (1) ein Berechnen eines tatsächlichen Leistungsfaktorwinkels bzw. Phasenverschiebungswinkels aus einer Differenz hinsichtlich der Phase zwischen der Sollspannung und dem erzeugten Strom, (2) ein Berechnen eines normalen Leistungsfaktorwinkels aus der Solldrehgeschwindigkeit und eines Drehmoments des Rotors, (3) ein Korrigieren eines Werts des Parameters, derart, dass der tatsächliche Leistungsfaktorwinkel im Wesentlichen mit dem normalen Leistungsfaktorwinkel übereinstimmt, und (4) ein Berechnen einer geschätzten Magnetpolposition aus der Sollspannung, dem erzeugten Strom und dem Parameter mit dem korrigierten Wert auf.
-
Da dementsprechend die Schätzung einer Magnetpolposition einmal pro Schätzungszyklus durchgeführt wird, kann eine Berechnungsmenge zum Schätzen einer Magnetpolposition reduziert werden. Da ferner der Parameter derart korrigiert wird, dass der tatsächliche Leistungsfaktorwinkel im Wesentlichen mit dem normalen Leistungsfaktorwinkel übereinstimmt, kann sich die geschätzte Magnetpolposition einer tatsächlichen Magnetpolposition zuverlässig nähern.
-
Die Aufgabe wird ferner durch die Schaffung einer Vorrichtung zum Steuern eines Synchronmotors gelöst, die eine Schätzeinheit, die eine Magnetpolposition eines Rotors in dem Motor aus einer Sollspannung, die aus einer Solldrehgeschwindigkeit des Rotors bestimmt wird und an den Motor angelegt ist, einem Strom, der aus der Sollspannung erzeugt wird, und einem Parameter, der aus einer Gruppe bestehend aus Statorwiderstand, Drehgeschwindigkeit und q-Achsen Induktivität ausgewählt ist, schätzt, und eine Steuereinheit, die den Motor gemäß der geschätzten Magnetpolposition steuert, aufweist. Die Schätzeinheit weist (1) einen ersten Rechner, der einen tatsächlichen Leistungsfaktorwinkel aus einer Differenz hinsichtlich der Phase zwischen der Sollspannung und dem erzeugten Strom berechnet, (2) einen zweiten Rechner, der einen normalen Leistungsfaktorwinkel aus der Solldrehgeschwindigkeit und einem Drehmoment des Rotors berechnet, (3) eine Korrigiereinheit, die einen Wert des Parameters derart korrigiert, dass der tatsächliche Leistungsfaktorwinkel im Wesentlichen mit dem normalen Leistungsfaktorwinkel übereinstimmt, und (4) einen dritten Rechner, der eine geschätzte Magnetpolposition aus der Sollspannung, dem erzeugten Strom und dem Parameter mit dem korrigierten Wert berechnet, auf.
-
Da eine Berechnungsmenge zum Schätzen einer Magnetpolposition reduziert ist, kann die Steuereinheit den Motor gemäß der geschätzten Magnetpolposition unverzüglich steuern. Teile, die für die Berechnung erforderlich sind, können ferner vereinfacht sein, derart, dass die Steuereinheit verkleinert werden kann.
-
Figurenliste
-
- 1 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einem ersten Ausführungsbeispiel der vorliegenden Erfindung;
- 2 zeigt eine Differenz hinsichtlich der Phase zwischen einer Phasenanpassungsspannung und einem Phasenanpassungsstrom;
- 3 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einer Modifikation des ersten Ausführungsbeispiels;
- 4 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einem zweiten Ausführungsbeispiel der vorliegenden Erfindung;
- 5A zeigt einen Phasenstrom, der hinsichtlich der Phase von einer Phasenspannung durch einen normalen Leistungsfaktorwinkel verschoben ist;
- 5B zeigt einen Phasenstrom, der hinsichtlich der Phase von einer Phasenspannung durch einen tatsächlichen Leistungsfaktorwinkel verschoben ist;
- 6 zeigt eine zweidimensionale Abbildung, die eine Beziehung zwischen einem normalen Leistungsfaktorwinkel und einer Kombination einer Drehgeschwindigkeit und eines Drehmoments zeigt; und
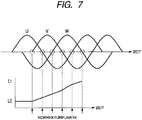
- 7 zeigt eine q-Achsen-Induktivität Lq, die jedes Mal korrigiert wird, wenn einer der drei Phasenströme eine Null-Pegel-Linie kreuzt.
-
DETAILLIERTE BESCHREIBUNG DER BEVORZUGTEN AUSFÜHRUNGSBEISPIELE
-
Ausführungsbeispiele der vorliegenden Erfindung sind im Folgenden unter Bezugnahme auf die beigefügten Zeichnungen beschrieben, in denen gleiche Bezugsziffern gleiche Teile, Bauglieder oder Elemente durch die Beschreibung hindurch zeigen, es sei denn, dass es anders gezeigt ist.
-
AUSFÜHRUNGSBEISPIEL 1
-
1 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einem ersten Ausführungsbeispiel der vorliegenden Erfindung.
-
Ein Synchronmotor 10, der in 1 gezeigt ist, weist Wicklungen eines Stators und einen Rotor (nicht gezeigt), der aus Permanentmagneten hergestellt ist, auf. Wenn eine Drei-Phasen-Wechselspannung an die Wicklungen angelegt ist, fließt ein Drei-Phasen-Wechselstrom, der aus Phasenströmen von U-, V- und W-Phasen zusammengesetzt ist, durch die Wicklungen, um ein änderbares Magnetfeld aufgrund der elektromagnetischen Induktion zu erzeugen, und der Rotor mit den Permanentmagneten wird auf der Drehachse desselben ansprechend auf das Magnetfeld gedreht. Die Drehkraft wird durch einen Übertrager, wie z. B. eine Riemenscheibe und einen Riemen, ausgegeben. Eine Phase des Stroms wird in einer Steuereinheit, die in 1 gezeigt ist, gesteuert, um den Rotor bei einer gewünschten Drehgeschwindigkeit stabil zu drehen.
-
Bei diesem Ausführungsbeispiel sind Permanentmagneten mit ausgeprägten Einzelpolen um eine Welle eines Rotors angeordnet, um von der Welle vorzustehen, derart, dass eine d-Achsen-Induktivität Ld des Motors entlang der d-Achsen-Richtung von einem überwachten S-Magnetpol zu einem entsprechenden N-Magnetpol in einem dq-Drehkoordinatensystem kleiner als eine q-Achsen-Induktivität Lq des Motors entlang einer q-Achsen-Richtung orthogonal zu der d-Achsen-Richtung auf einer Ebene senkrecht zu der Drehachse ist.
-
Wie in 1 gezeigt ist, werden Daten einer Solldrehgeschwindigkeit τ* des Rotors zu einem Befehlsstromerzeuger 1 der Steuereinheit wiederholt gegeben. Jedes Mal, wenn Daten der Geschwindigkeit τ* zu der Steuereinheit gegeben werden, berechnet der Erzeuger 1 Werte von sowohl einer d-Achsen-Komponente id* als auch einer q-Achsen-Komponente iq* eines Sollwechselstroms i*, der in dem dq-Drehkoordinatensystem definiert ist, aus der Geschwindigkeit τ*. In dem dq-Drehkoordinatensystem wird ein Ursprungspunkt bei einer Position auf der Drehachse eingestellt. Da das dq-Koordinatensystem ein Rotationssystem bzw. Drehsystem ist, sind eine Spannung bzw. ein Strom durch einen Gleichstrom und eine Gleichspannung in dem dq-Koordinatensystem ausgedrückt. Das dq-Koordinatensystem stellt daher ein Zwei-Phasen-Gleichstrom-Koordinatensystem dar.
-
Ein erster Differenzrechner 2 berechnet eine d-Achsen-Differenz Δid zwischen der d-Achsen-Komponente i*d und einer d-Achsen-Komponente id eines erfassten Stroms idet und berechnet eine q-Achsen-Differenz Δiq zwischen der q-Achsen-Komponente i*q und einer q-Achsen-Komponente iq des erfassten Stroms idet . Der Strom wird von den Statorwicklungen des Motors 10 erfasst. Eine Stromregelung 3 berechnet Werte von sowohl einer d-Achsen-Komponente V*d als auch einer q-Achsen-Komponente V*q einer Sollspannung V* aus den Differenzen Δid und Δiq , derart, das sich jede der Differenzen Δid und Δiq null nähert, wenn die Sollspannung an den Motor 10 angelegt ist. Die Frequenz der Sollspannung V* ist gleich derselben des Sollstroms i*.
-
Ein dq/αβ-Koordinatenwandler bzw. Koordinatentransformierer 4 transformiert das dq-Drehkoordinatensystem in ein αβ-Koordinatensystem basierend auf einer geschätzten Magnetpolposition θes des Rotors, um die Komponenten V*d und V*q der Sollspannung V* in eine α-Achsen-Komponente V*α und eine β-Achsen-Komponente V*β , die in dem αβ-Koordinatensystem definiert sind, umzuwandeln. Die Position θes ist durch einen Drehwinkel des Rotors ausgedrückt.
-
Wie gut bekannt ist, ist das αβ-Koordinatensystem ein stationäres bzw. ortsfestes System und ist durch eine α-Achse und eine β-Achse, die zueinander orthogonal sind, an einer Ebene senkrecht zu der Drehachse des Rotors definiert, und ein Ursprungspunkt des αβ-Koordinatensystems ist auf die Drehachse des Rotors eingestellt, um die gleiche Position wie derselbe des dq-Koordinatensystems aufzuweisen. Da das αβ-Koordinatensystem ein ortsfestes System ist, sind eine Spannung bzw. ein Strom durch einen Wechselstrom und eine Wechselspannung in dem αβ-Koordinatensystem ausgedrückt. Das αβ-Koordinatensystem stellt daher ein Zwei-Phasen-Wechselstromkoordinatensystem dar.
-
Eine geschätzte Magnetpolposition ist in dem αβ-Koordinatensystem durch einen Winkel zwischen einer Richtung einer geschätzten Magnetpolposition und der α-Achse ausgedrückt. Bei diesem Fall ist eine tatsächliche Magnetpolposition θc durch einen Winkel zwischen einer Richtung einer tatsächlichen Magnetpolposition (d. h. d-Achse) und der α-Achse ausgedrückt. Wenn eine Magnetpolposition des Rotors korrekt geschätzt ist, um die tatsächliche Position anzuzeigen, kann eine relative Beziehung hinsichtlich der Phase (d. h. ein Winkel zwischen der α-Achse und der d-Achse) zwischen dem ortsfesten αβ-Koordinatensystem und dem dq-Drehkoordinatensystem spezifiziert werden. Die Koordinatentransformation kann daher basierend auf der geschätzten Position θes korrekt durchgeführt werden.
-
Ein Addierer 5 addiert eine Phasenanpassungsspannung V*h mit einer α-Achsen-Komponente V*hα und einer β-Achsen-Komponente V*hβ zu der Sollspannung V*, die aus dem Transformierer 4 ausgegeben wird, um eine überlagerte Befehlsspannung mit einer α-Achsen-Komponente V*hα+V*α und einer β-Achsen-Komponente V*hβ+V*β zu erzeugen. Eine Frequenz der Phasenanpassungsspannung ist höher als eine Frequenz der Sollspannung V*. Die Phasenanpassungsspannung weist beispielsweise eine höhere harmonische Schwingung mit einer harmonischen Frequenz bzw. Oberwellenfrequenz auf, während die Sollspannung eine Grundschwingung einer Grundfrequenz aufweist. Die harmonische Frequenz ist ein ganzzahliges Vielfaches der Grundfrequenz.
-
Ein αβ/uvw-Koordinatentransformierer 6 transformiert das αβ-Koordinatensystem in ein UVW-Koordinatensystem, das durch eine U-Phasen-Achse, eine V-Phasen-Achse und eine W-Phasen-Achse definiert ist, um die Komponenten V*hα+V*α und V*hβ+V*β der überlagerten Befehlsspannung in eine U-Phasen-Komponente V*u, eine V-Phasen-Komponenten V*v und eine W-Phasen-Komponente V*w umzuwandeln. Die drei Achsen des UVW-Koordinatensystems sind bei gleichen Intervallen von 120 Grad hinsichtlich des elektrischen Winkels auf der Ebene senkrecht zu der Drehachse beabstandet und entsprechen U-, V- und W-Phasen, und ein Ursprungspunkt des UVW-Koordinatensystems ist eingestellt, um gleich demselben des αβ-Koordinatensystems zu sein.
-
Ein Pulsbreitenmodulations- (PWM-; PWM = Pulse Width Modulation) Signalerzeuger 7 erzeugt ein PWM-Signal aus jeder der Komponenten V*u, V*v und V*w der überlagerten Befehlsspannung. Die PWM-Signale werden jeweils zu einem Inverter 8 übertragen, um drei Schaltelemente, die den Statorwicklungen entsprechen, zu betreiben. Die Komponenten V*u, V*v bzw. V*w der überlagerten Befehlsspannung sind daher an die Wicklungen angelegt. Ansprechend auf die überlagerte Befehlsspannung fließt ein Drei-Phasen-Wechselstrom mit einer U-Phasen-Komponente iU , einer V-Phasen-Komponente iV und einer W-Phasen-Komponente iw durch die Wicklungen. Der Motor 10 erzeugt ferner abhängig von einer Magnetpolposition eine induzierte Spannung. Der Wechselstrom hängt daher von einer überlagerten Befehlsspannung und der induzierten Spannung ab.
-
Ein Stromsensor 9 erfasst Werte der Phasenkomponenten iU , iV und iw des Wechselstroms idet . Der Sensor 9 kann lediglich zwei der drei Komponentenwerte erfassen, um den anderen Komponentenwert aus den erfassten Werten zu berechnen. Ein uvw/αβ-Koordinatentransformierer 11 transformiert das uvw-Koordinatensystem in das αβ-Koordinatensystem, um die Komponenten iU , iV und iW des erfassten Wechselstroms idet in eine α-Achsen-Komponente iα und eine β-Achsen-Komponente iβ umzuwandeln. Dieser Strom weist einen Rotortreibstrom, der aus der Sollspannung erzeugt wird, und einen Phasenanpassungsstrom, der aus der Phasenanpassungsspannung erzeugt wird, auf. Der Rotortreibstrom weist die gleiche Frequenz wie dieselbe der Sollspannung auf, und der Phasenanpassungsstrom weist die gleiche Frequenz wie dieselbe der Phasenanpassungsspannung auf. Der erfasste Wechselstrom wird in einem αβ/dq-Koordinatentransformierer 12 und einer Magnetpolpositionsschätzeinheit 13 empfangen.
-
Der Transformierer 12 transformiert das αβ-Koordinatensystem in das dq-Koordinatensystem basierend auf der geschätzten Magnetpolposition θes , die aus der Schätzeinheit 13 ausgegeben wird, um die Komponente iα und iβ des erfassten Wechselstroms in eine d-Achsen-Komponente id und eine q-Achsen-Komponente iq umzuwandeln. Die Komponenten id und iq des erfassten Stroms werden zu dem Rechner 2 übertragen. Die Frequenz des Phasenanpassungsstroms, den der erfasste Strom in sich aufweist, ist hier höher als dieselbe des Sollstroms, der in dem Erzeuger 1 erzeugt wird, während der Treibstrom, den der erfasste Strom in sich aufweist, die gleiche Frequenz wie dieselbe des Sollstroms aufweist. Daher übt der Phasenanpassungsstrom kaum einen Einfluss auf die Berechnung des Rechners 2 aus.
-
Die Schätzeinheit 13 schätzt eine Magnetpolposition θes des Rotors gemäß einem Motormodellausdruck, bei dem die Komponenten V*α und V*β der Sollspannung, die von dem Transformierer 4 empfangen wird, die Komponenten iα und iβ des erfassten Stroms, der von dem Transformierer 11 empfangen wird, und Parameter verwendet werden. Dieser Motormodellausdruck wird durch Anwenden eines Störungsüberwachers auf ein Motormodell, das eine erweiterte bzw. verlängerte induzierte Spannung berücksichtigt, erhalten. Der Störungsüberwacher ist beispielsweise in einem Paper bzw. Aufsatz „Position and Speed Sensorless Control of IPMSM Using Extended Induced Voltage Disturbance Observer“, geschrieben von Ichikawa, Chin, Tomita, Michiki und Ookuma bei der Tagung des Industrial Applied Section im Jahre 2000, Institute of Electrical Engineer of Japan (IEEJ), offenbart.
-
Das Modell, das eine erweiterte induzierte Spannung berücksichtigt, ist in dem αβ-Koordinatensystem gemäß einer ersten Formel ausgedrückt:
-
Es werden sowohl eine α-Achsen-Komponente Vα als auch eine β-Achsen-Komponente Vβ einer an einen Motor angelegten Sollspannung, ein Widerstand R eines Stators, eine Drehgeschwindigkeit ωre eines Rotors, die durch Differenzieren einer Position des Rotors, die bei einem vorhergehenden Schätzungszyklus geschätzt wird, hinsichtlich der Zeit erhalten wird, eine d-Achsen-Induktivität Ld in dem Motor, eine q-Achsen-Induktivität Lq in dem Motor, ein Differentialoperator p, sowohl eine α-Achsen-Komponente iα als auch eine β-Achsen-Komponente iβ eines Treibstroms, der aus dem Motor erfasst wird, und eine Konstante KE einer induzierten Spannung verwendet.
-
Bei diesem Modellausdruck ist der zweite Ausdruck der rechten Seite als eine erweiterte induzierte Spannung definiert. Zusätzlich zu einer induzierten Spannung basierend auf Permanentmagneten des Rotors wird eine Induktivitätsdifferenz L
d-L
q, die ein Reluktanzdrehmoment bzw. synchrones Drehmoment erzeugt, als eine Komponente eines zusätzlichen Magnetflusses berücksichtigt. Eine Magnetpolposition kann unter Verwendung dieses Modells ohne weiteres geschätzt werden. Wenn ein Störungsüberwacher, der eine erweiterte induzierte Spannung als Störung betrachtet, basierend auf diesem Modell gebildet wird, kann eine erweiterte induzierte Spannung berechnet werden. Sowohl eine α-Achsen-Komponente e
α als auch eine β-Achsen-Komponente e
β der erweiterten induzierten Spannung sind gemäß einer zweiten Formel ausgedrückt:
-
Ein Differentialoperator s und ein Überwacherpol α sind zusätzlich verwendet.
-
Da die Beziehung von tanθ
es = -e
α/e
β durch Berücksichtigen eines Vektors einer Spannung, der um 90 Grad einer Richtung eines Magnetflusses (d. h. einer Richtung einer geschätzten Magnetpolposition) voreilt, erfüllt ist, wird die geschätzte Position
θesl durch eine Arcustangens-Berechnung gemäß einer dritten Formel erhalten:
-
Bei dieser Schätzung wird die induzierte Spannung gemäß dem detaillierten Motormodell berechnet. Obwohl sich eine Drehgeschwindigkeit des Rotors oder eine Last, die dem Rotor hinzugefügt ist, schnell ändern, kann die Magnetpolposition des Rotors aus der induzierten Spannung e(eα, eβ) korrekt geschätzt werden. Da jedoch dieses Motormodell einen Differentialausdruck s/(s+α) aufweist, ist eine für die Schätzung erforderliche Berechnungsmenge enorm vergrößert. Um die Berechnungsmenge zu reduzieren, kann ein näherndes Motormodell, das keinen Differentialausdruck aufweist, zur Schätzung einer Magnetpolposition verwendet werden.
-
Eine Amplitude Ia(t) von sowohl der α-Achsen-Komponente
iα (i
α = -Ia(t)·sinθ, θ = ω
ret+c, c ist eine Konstante) als auch der β-Achsen-Komponente
iβ (i
β = Ia(t)·cosθ) des Treibstroms ändert sich insbesondere mit der Zeit. Diese zeitabhängige Amplitude Ia(t) wird durch eine Amplitude Ia, die im Wesentlichen von der Zeit t nicht abhängt (d/dt·Ia = 0), genähert oder ersetzt. D. h., ein hinsichtlich der Zeit differenzierter Wert einer Amplitude des Treibstroms wird im Wesentlichen auf null eingestellt (Schritt
S12). In diesem Fall kann ein Differentialausdruck für die α-Achsen-Komponente
iα in dem Motormodell gemäß einer vierten Formel neu geschrieben werden:
-
Auf die gleiche Art und Weise kann ein Differentialausdruck für die β-Achsen-Komponente
iβ in dem Motormodell gemäß einer fünften Formel neu geschrieben werden.
-
Die zweite Formel kann daher vereinfacht und neu geschrieben werden, und eine sechste Formel, die ein näherndes Motormodells ausdrückt, kann durch Einfügen der vierten und der fünften Formel in die zweite Formel erhalten werden.
-
Die Komponenten eα und eβ der induzierten Spannung werden aus den Komponenten V*α und V*β der Sollspannung und den Komponenten iα und iβ des Treibstroms unter Verwendung von Parametern, wie z. B. einem Statorwiderstand R, einer Drehgeschwindigkeit ωre und einer q-Achsen-Induktivität Lq, berechnet. Die geschätzte Position θes wird aus den Komponenten eα und eβ der induzierten Spannung gemäß der dritten Formel erhalten. Die geschätzte Position θes wird zu den Transformierern 4 und 12 und einem Störungserzeuger 17 ausgegeben. Da hier die Frequenz der Phasenanpassungsspannung und des Phasenanpassungsstroms höher als dieselbe der Sollspannung und des Treibstroms ist, üben die Phasenanpassungsspannung und der Phasenanpassungsstrom keinen Einfluss auf die Schätzung in der Einheit 13 aus.
-
Wenn die Parameter ungeachtet der Betriebsbedingungen eines Motors oder von Größen und Formen von Teilen des Motors bei der Massenerzeugung konstant sind, kann eine Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition (d. h. d-Achse) angepasst ist bzw. mit derselben übereinstimmt, in der Einheit 13 geschätzt werden. Werte der Parameter, die für den Motor 10 geeignet sind, variieren jedoch aufgrund verschiedener Ursachen, wie z. B. einer Änderung der Betriebsbedingungen und Variationen der Größen und Formen von Teilen des Motors. Wenn daher alle Parameterwerte eingestellt sind, um konstant zu sein, kann die Position θes, die mit einer tatsächlichen Magnetpolposition übereinstimmt, nicht korrekt geschätzt werden.
-
Um dieses Problem zu lösen, ist eine Phasenanpassungsspannung einer höheren harmonischen Schwingung an dem Motor 10 zusätzlich zu der Sollspannung einer Grundschwingung angelegt, und ein Phasenanpassungsstrom, der aus der Phasenanpassungsspannung erzeugt wird, wird von dem Motor 10 erfasst. Der Phasenanpassungsstrom weist die gleiche harmonische Frequenz wie dieselbe der Phasenanpassungsspannung auf. Wenn eine Phase des Phasenanpassungsstroms von derselben der Phasenanpassungsspannung verschoben ist, wird beurteilt, dass sich mindestens einer der Parameter von einem Wert, der für den Motor 10 geeignet ist, unterscheidet, um eine geschätzte Magnetpolposition von einer tatsächlichen Magnetpolposition zu unterscheiden. Ansprechend auf diese Beurteilung wird der Parameter gemäß einer Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom korrigiert, derart, dass die Phasendifferenz im Wesentlichen null ist. Die d-Achsen-Induktivität Ld wird beispielsweise korrigiert.
-
Die Argumentation, dass sich die geschätzte Magnetpolposition der tatsächlichen Magnetpolposition nähern kann, wenn die Phasendifferenz im Wesentlichen null wird, ist beschrieben. Bei dem Motor 10 mit den Einzelpol-Permanentmagneten ist die d-Achsen-Induktivität Ld kleiner als die q-Achsen-Induktivität Lq. Wenn daher ein Magnetfeld in den Statorwicklungen induziert wird, ist der Fluss eines Wechselstroms entlang der d-Achse leichter als entlang der q-Achse. D. h., eine Impedanz für den Wechselstrom entlang der q-Achse ist größer als dieselbe entlang der d-Achse. Wenn ein Vektor einer Sollspannung, die an den Motor 10 angelegt ist, daher nicht auf der d-Achse platziert ist, wird ein Vektor eines Treibstroms, der aus der Sollspannung erzeugt wird, hin zu der d-Achse hinsichtlich des Vektors der Sollspannung verschoben.
-
Der Störungserzeuger 17 erzeugt Daten von einer α-Achsen-Komponente V*hα und einer β-Achsen-Komponente V*hβ der Phasenanpassungsspannung V*h , derart, dass eine Phase der Phasenanpassungsspannung gleich derselben der geschätzten Position θes , die vorher in der Schätzeinheit 13 erhalten wird, ist. In dem Addierer 5 wird die Phasenanpassungsspannung der Sollspannung V*(V*α, V*β) überlagert. Daher weist der erfasste Wechselstrom in sich einen Phasenanpassungsstrom, der aus der Phasenanpassungsspannung erzeugt wird, auf.
-
2 zeigt eine Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom.
-
Wie in 2 gezeigt ist, unterscheidet sich, wenn sich die geschätzte Position θes von einer tatsächlichen Magnetpolposition (d-Achse) unterscheidet, eine Phase (die durch eine γ-Achse in 2 gezeigt ist) der Phasenanpassungsspannung von der d-Achse, die einer tatsächlichen Magnetpolposition entspricht. Da das Fließen eines Wechselstroms entlang der d-Achse leichter als entlang der q-Achse ist, ist eine Phase des Phasenanpassungsstroms hin zu der d-Achse hinsichtlich der Phase der Phasenanpassungsspannung verschoben. Bei dem in 2 gezeigten Beispiel eilt, wenn die Phase der Phasenanpassungsspannung der d-Achse voreilt, die Phase des Phasenanpassungsstroms der Phase der Phasenanpassungsspannung nach. Wenn im Gegensatz dazu die Phase des Phasenanpassungsstroms der d-Achse nacheilt, eilt die Phase des Phasenanpassungsstroms der Phase der Phasenanpassungsspannung vor. Eine Phasendifferenz θvi zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom ist im Wesentlichen null, wenn die Phase der Phasenanpassungsspannung mit der d-Achse übereinstimmt oder an dieselbe angepasst ist. Wenn daher mindestens einer der Parameter in dem nähernden Motormodellausdruck korrigiert wird, derart, dass die Phasendifferenz fast null ist, kann sich die geschätzte Position einer tatsächlichen Magnetpolposition nähern.
-
Um mindestens einen der Parameter in dem nähernden Motormodellausdruck gemäß der Phasendifferenz zu korrigieren, derart, dass die Phasendifferenz fast null ist, hält eine Verzögerungseinheit 14 den erfassten Wechselstrom, der aus dem Transformierer 11 ausgegeben wird, für eine vorbestimmte Zeitperiode (z. B. eine Zeitperiode, die einer Wellenlänge des erfassten Wechselstroms entspricht), um einen verzögerten bzw. nacheilenden Wechselstrom zu erzeugen. Ein zweiter Differenzrechner 15 subtrahiert den nacheilenden Wechselstrom von dem erfassten Wechselstrom, der aus dem Transformierer 11 ausgegeben wird. Bei dieser Subtraktion gleicht der Treibstrom, den der nacheilende Wechselstrom in sich aufweist, denselben des erfassten Wechselstroms aus. Der Rechner 15 führt dann einen Abtastbetrieb mit einem Zyklus gleich der Frequenz der Phasenanpassungsspannung durch, um eine α-Achsen-Komponente ihα und eine β-Achsen-Komponente ihβ des Phasenanpassungsstroms aus dem subtrahierten Resultat zu extrahieren, ohne eine Phasenverzögerung in dem Phasenanpassungsstrom zu bewirken.
-
Um den Phasenanpassungsstrom aus dem erfassten Wechselstrom zu extrahieren, kann ein Hochpassfilter anstelle der Verzögerungseinheit 14 und des Rechners 15 verwendet sein. In diesem Fall wird, da eine Phasenverzögerung in dem Phasenanpassungsstrom auftritt, eine Phasenkompensation für den Phasenanpassungsstrom benötigt.
-
Ein Rechner
16 für ein äußeres Produkt berechnet eine Länge eines äußeren Produkts der Phasenanpassungsspannung V(V*
hα, V*
hβ), die in dem Erzeuger
17 erzeugt wird, und des Phasenanpassungsstroms I(i
hα, i
hβ), der in dem Rechner
15 erzeugt wird, gemäß einer siebten Formel.
-
In dieser Formel wird, wenn der Strom I hinsichtlich der Phase der Spannung V voreilt, d. h., wenn die geschätzte Magnetpolposition θes von einer tatsächlichen Magnetpolposition θc verzögert ist bzw. derselben nacheilt, die berechnete Länge positiv. Wenn im Gegensatz dazu der Strom I hinsichtlich der Phase der Spannung V nacheilt, d. h., wenn die geschätzte Magnetpolposition θes einer tatsächlichen Magnetpolposition θc voreilt, wird die berechnete Länge negativ. θvi bezeichnet eine Phasendifferenz zwischen den Vektoren V und I.
-
Im Vergleich zu einem Fall, bei dem eine Phasendifferenz θvi unter Verwendung von komplizierten Berechnungen, wie z. B. einer Arcustangens-Berechnung, direkt berechnet wird, sind lediglich einfache Berechnungen, wie z. B. eine Multiplikation und eine Subtraktion erforderlich, um das äußere Produkt zu berechnen. Eine Berechnungsmenge bei der Schätzung einer Magnetpolposition kann daher weiter reduziert werden.
-
Eine Länge des äußeren Produkts ist null, wenn die Phasendifferenz θvi null ist. Wenn sich die Phasendifferenz θvi von null unterscheidet, weist das äußere Produkt eine Länge mit einem Plus- oder einem Minus-Zeichen auf. Es ist daher bevorzugt, dass die Länge des äußeren Produkts als ein Wert, der der Phasendifferenz entspricht, berechnet wird.
-
Eine Kompensiereinheit
18 korrigiert einen Wert der q-Achsen-Induktivität L
q basierend auf der Länge des äußeren Produkts, während ein Vorzeichen einer Länge des äußeren Produkts berücksichtigt wird, gemäß einer achten Formel:
-
L0 bezeichnet einen Anfangswert. Kp bezeichnet einen Proportionsgewinn bzw. eine Proportionsverstärkung. Ki bezeichnet eine Integrationsverstärkung. Die q-Achsen-Induktivität Lq kann daher zuverlässig korrigiert werden, derart, dass ein äußeres Produkt, das basierend auf der korrigierten Induktivität Lq berechnet wird, im Wesentlichen null ist.
-
Die Schätzeinheit 13 schätzt die Magnetpolposition basierend auf der korrigierten Induktivität Lq gemäß der zweiten Formel, Da daher die korrigierte Induktivität Lq in der Einheit 18 bestimmt wird, derart, dass das äußere Produkt im Wesentlichen null ist, kann die geschätzte Magnetpolposition θes bestimmt werden, derart, dass die Phasendifferenz im Wesentlichen null ist, und die geschätzte Magnetpolposition θes kann im Wesentlichen an eine tatsächliche Magnetpolposition θc angepasst sein.
-
Zum Schluss wird bei diesem Ausführungsbeispiel, wenn eine Magnetpolposition in dem Motor 10 aus einer Sollspannung, die an den Motor angelegt ist, einem Strom, der aus der Spannung erzeugt wird, und Parametern gemäß dem nähernden Motormodellausdruck geschätzt wird, eine Phasenanpassungsspannung, bei der eine Phase an die geschätzte Magnetpolposition, die bei einem ersten Zyklus berechnet wird, angepasst ist, an den Motor angelegt, ein Phasenanpassungsstrom, der aus der Phasenanpassungsspannung erzeugt wird, wird von dem Motor erfasst, und ein Wert von mindestens einem der Parameter wird derart korrigiert, dass eine Differenz hinsichtlich der Phase zwischen der Phasenanpassungsspannung und dem Phasenanpassungsstrom im Wesentlichen null ist. Wenn daher eine Magnetpolposition bei einem zweiten Zyklus, der dem ersten Zyklus folgt, aus der Sollspannung, dem erzeugten Strom und den Parametern, die den Parameter mit dem korrigierten Wert aufweisen, geschätzt wird, kann eine Phase der Sollspannung basierend auf der geschätzten Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition angepasst ist, gesteuert werden.
-
Ein Betrieb des Motors I0 kann dementsprechend zuverlässig gesteuert werden, und eine Berechnungsmenge zum Schätzen einer Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition angepasst ist, kann beträchtlich reduziert werden.
-
Da ferner der Phasenanpassungsstrom, der aus der Phasenanpassungsspannung erzeugt wird, durch die Statorwicklungen des Motors 10 fließt, kann eine magnetische Sättigung, die einen ausreichenden Strom erfordert, in dem Motor 10 zuverlässig erhalten werden. Der Motor kann daher zuverlässig getrieben werden.
-
Die Frequenz der Phasenanpassungsspannung kann zwischen 300 Hz bis 10 KHz schwanken. Wenn jedoch die Frequenz der Phasenanpassungsspannung nicht ausreichend höher als dieselbe der Sollspannung ist, besteht eine Wahrscheinlichkeit, dass ein Pulsieren auftritt, derart, dass der Wert der Sollspannung schwankt oder Rauschen einer niedrigen Tonfrequenz erzeugt wird. Wenn im Gegensatz dazu die Frequenz der Phasenanpassungsspannung übermäßig hoch ist, wird es schwierig, den Phasenanpassungsstrom aus dem erfassten Wechselstrom zu extrahieren. Wenn daher ein Pulsieren oder Rauschen während des Betriebs des Motors 10 ermöglicht ist, schwankt die Frequenz der Phasenanpassungsspannung vorzugsweise zwischen 300 bis 700 Hz. Wenn eine Einheit mit einer höheren Leistung verwendet wird, um den Phasenanpassungsstrom zu extrahieren, schwankt die Frequenz der Phasenanpassungsspannung vorzugsweise zwischen 5 bis 10 KHz.
-
Bei diesem Ausführungsbeispiel ist eine Frequenz der Phasenanpassungsspannung, die eine harmonische Schwingung aufweist, ein ganzzahliges Vielfaches (zwei Mal oder drei Mal, --) derselben der Sollspannung, die eine Grundschwingung aufweist. Die Phasenanpassungsspannung kann jedoch eine Frequenz aufweisen, die höher als dieselbe der Sollspannung ist.
-
Die Kompensiereinheit 18 berechnet ferner einen korrigierten Wert der q-Achsen-Induktivität Lq. Wenn jedoch die Länge des äußeren Produkts positiv ist, ist die geschätzte Magnetpolposition θes von einer tatsächlichen Magnetpolposition θc verzögert bzw. eilt derselben nach. Wenn im Gegensatz dazu die Länge des äußeren Produkts negativ ist, eilt die geschätzte Magnetpolposition θes einer tatsächlichen Magnetpolposition θc vor. Es kann daher basierend auf einem Vorzeichen der Länge des äußeren Produkts beurteilt werden, ob die geschätzte Magnetpolposition θes einer tatsächlichen Magnetpolposition θc voreilt oder nacheilt. Die Einheit 18 kann daher die q-Achsen-Induktivität Lq um einen vorbestimmten Wert basierend auf einem Vorzeichen der Länge des äußeren Produkts vergrößern oder verringern, derart, dass sich die Phasendifferenz null nähert.
-
ERSTE MODIFIKATION DES ERSTEN AUSFÜHRUNGSBEISPIELS
-
Bei dem ersten Ausführungsbeispiel sind die Phasenanpassungsspannung V*h (V*hα, Vhβ) und der Phasenanpassungsstrom ih (ihα, ihβ) in dem ortsfesten αβ-Koordinatensystem definiert. Eine Magnetpolposition kann jedoch derart geschätzt werden, dass ein äußeres Produkt einer Phasenanpassungsspannung und eines Phasenanpassungsstroms, die in dem dq-Drehkoordinatensystem definiert sind, im Wesentlichen null ist.
-
3 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einer ersten Modifikation des ersten Ausführungsbeispiels.
-
Wie in 3 gezeigt ist, erzeugt der Störungserzeuger 17 eine d-Achsen-Komponente V*hd einer Phasenanpassungsspannung, derart, dass eine Phase der Phasenanpassungsspannung an dieselbe der geschätzten Position θes angepasst ist. Da die Position θes korrekt geschätzt im Wesentlichen an eine tatsächliche Position θc , die auf der d-Achse platziert ist, angepasst ist, wird die Phasenanpassungsspannung derart erzeugt, dass die Phase der Phasenanpassungsspannung an die d-Achse angepasst ist. D. h., die Phasenanpassungsspannung weist einen q-Achsen-Komponentenwert auf, der im Wesentlichen gleich null ist. Der Addierer 5 addiert die Phasenanpassungsspannung (V*hd, 0) zu der Sollspannung V*(V*d, V*q), die aus der Steuerung 3 ausgegeben wird, um eine überlagerte Befehlsspannung zu erzeugen. Der Transformierer 4 wandelt Komponenten der überlagerten Befehlsspannung in α- und β-Achsen-Komponenten um, und der Transformierer 6 transformiert diese Komponenten in U-, V- und W-Achsen-Komponenten.
-
Die Verzögerungseinheit 14 verzögert einen erfassten Wechselstrom idet (id , iq ), der in dem Transformierer I2 erzeugt wird, und der Rechner 15 subtrahiert den verzögerten bzw. nacheilenden Wechselstrom von dem erfassten Wechselstrom, der aus dem Transformierer 12 ausgegeben wird, um einen Phasenanpassungsstrom ih (ihd , ihq ) aus dem erfassten Wechselstrom zu extrahieren. Der Rechner 16 berechnet eine Länge eines äußeren Produkts der Phasenanpassungsspannung Vh (V*hd, 0) und des Phasenanpassungsstroms i h (ihd, ihq). Die Kompensiereinheit 18 korrigiert einen Wert der q-Achsen-Induktivität Lq basierend auf der Länge des äußeren Produkts, derart, dass ein äußeres Produkt, das basierend auf der korrigierten Induktivität Lq berechnet wird, im Wesentlichen null ist, und die Schätzeinheit 13 schätzt eine Magnetpolposition basierend auf der q-Achsen-Induktivität Lq, die auf den korrekten Wert eingestellt ist.
-
Da die Phasenanpassungsspannung einen q-Achsen-Komponentenwert aufweist, der im Wesentlichen gleich null ist, kann eine Berechnung des äußeren Produkts weiter vereinfacht werden.
-
ZWEITE MODIFIKATION DES ERSTEN AUSFÜHRUNGSBEISPIELS
-
Ein angelegter Phasenanpassungsstrom mit lediglich einer d-Achsen-Komponente kann der d-Achsen-Differenz Δid , die aus dem Rechner 2 ausgegeben wird, überlagert sein. In diesem Fall erzeugt der Störungserzeuger 17 den Phasenanpassungsstrom mit der gleichen Phase wie dieselbe einer geschätzten Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition angepasst ist. Die Steuerung 3 wandelt den Phasenanpassungsstrom in eine Phasenanpassungsspannung mit der gleichen Phase wie der Phasenanpassungsstrom um. Die Phasenanpassungsspannung ist an den Motor I0 angelegt, und der Rechner 15 extrahiert einen Phasenanpassungsstrom ih (ihd , ihq ), der aus dem angelegten Phasenanpassungsstrom erzeugt wird, aus dem erfassten Wechselstrom.
-
Die Phasenanpassungsspannung, die der Sollspannung überlagert ist, ist daher im Wesentlichen an den Motor angelegt, und die q-Achsen-Induktivität Lq kann derart korrigiert werden, dass ein äußeres Produkt der angelegten Phasenanpassungsspannung und des Phasenanpassungsstroms im Wesentlichen null ist.
-
AUSFÜHRUNGSBEISPIEL 2
-
4 ist ein Blockdiagramm einer Steuereinheit für einen Synchronmotor gemäß einem zweiten Ausführungsbeispiel der vorliegenden Erfindung. 5A zeigt einen Phasenstrom, der hinsichtlich einer Phase von einer Phasenspannung durch einen normalen Leistungsfaktorwinkel bzw. Phasenverschiebungswinkel verschoben ist, und 5A zeigt einen Phasenstrom, der hinsichtlich der Phase von einer Phasenspannung durch einen tatsächlichen Leistungsfaktorwinkel verschoben ist. 6 zeigt eine zweidimensionale Abbildung, die eine Beziehung zwischen einem normalen Leistungsfaktorwinkel und einer Kombination einer Drehgeschwindigkeit und eines Drehmoments zeigt. 7 zeigt eine q-Achsen-Induktivität Lq, die jedes Mal korrigiert wird, wenn einer der drei Phasenströme eine Nullpegellinie kreuzt.
-
Ein Synchronmotor 40, der in 4 gezeigt ist, unterscheidet sich von dem in 1 gezeigten Motor 10 dahingehend, dass der Motor 40 einen Rotor (nicht gezeigt), der aus Permanentmagneten mit ausgeprägten Polen oder Vollpolen hergestellt ist, aufweist.
-
Wie in 4 gezeigt ist, schätzt eine Drehmomentschätzeinheit 22 ein Drehmoment des Rotors des Motors 10 basierend auf den Phasenströmen iU , iV und iW des Drei-Phasen-Stroms, der in dem Sensor 9 erfasst wird. Eine Bestimmungseinheit 23 für einen normalen Leistungsfaktorwinkel bestimmt einen normalen Leistungsfaktorwinkel aus sowohl der Solldrehgeschwindigkeit τ* des Rotors als auch dem geschätzten Drehmoment.
-
Wie in 5A gezeigt ist, ist ein Leistungsfaktorwinkel als eine Phasendifferenz zwischen einer Phasenspannung einer Drei-Phasen-Spannung, die an einen Motor angelegt ist, und einem Phasenstrom eines Drei-Phasen-Stroms, der aus der angelegten Drei-Phasen-Spannung erzeugt wird, definiert, Die Phasendifferenz wird aus einer Differenz einer Nullpegel-Kreuzzeit zwischen dem Phasenstrom und der Phasenspannung erhalten. Wenn eine Magnetpolposition, die in der Schätzeinheit 13 geschätzt wird, an eine tatsächliche Magnetpolposition angepasst ist, ist der Leistungsfaktorwinkel minimiert und erreicht einen normalen Leistungsfaktorwinkel ϕ*d. Ein Leistungsfaktor des Motors wird sowohl aus einer Drehgeschwindigkeit als auch einem Drehmoment eines Rotors bestimmt und ist maximiert, wenn die Phasendifferenz gleich dem normalen Leistungsfaktorwinkel ϕ*d ist.
-
Die Bestimmungseinheit 23 speichert eine zweidimensionale Abbildung, die in 6 gezeigt ist. Diese Abbildung zeigt eine Beziehung zwischen einem normalen Leistungsfaktorwinkel und einer Kombination einer Drehgeschwindigkeit und eines Drehmoments. Wenn die Geschwindigkeit τ* und das geschätzte Drehmoment empfangen wird, nimmt die Einheit 23 auf die Abbildung Bezug und erfasst einen normalen Leistungsfaktorwinkel, der auf einen Wert eingestellt ist, der einem Betriebspunkt des Motors 10, der durch die Kombination der Geschwindigkeit τ* und des geschätzten Drehmoments bestimmt ist, entspricht.
-
Eine Berechnungseinheit 21 für einen tatsächlichen Leistungsfaktorwinkel empfängt die Phasenspannungen V*u, V*v und V*w der Drei-Phasen-Sollspannung und der Phasenströme iU , iV und iW des erfassten Drei-Phasen-Stroms von dem Transformierer 6 und dem Sensor 9 und berechnet eine Phasendifferenz zwischen jeder Phasenspannung und dem entsprechenden Phasenstrom, jedes Mal, wenn der Phasenstrom eine Linie des Nullpegels kreuzt, und berechnet eine Durchschnittsphasendifferenz aus den Phasendifferenzen. Die Einheit 21 gibt die Durchschnittsphasendifferenz als einen tatsächlichen Leistungsfaktorwinkel zu einem zweiten Differenzrechner 24 aus.
-
Der tatsächliche Leistungsfaktorwinkel kann gemäß einem Verfahren, das in der veröffentlichten japanischen Patenterstveröffentlichung Nr.
JP 2004-064 860 A oder in der veröffentlichten japanischen Patenterstveröffentlichung Nr.
JP 2004-088 838 A offenbart ist, berechnet werden. Ein Integrationsbereich der Zeit ist insbesondere basierend auf benachbarten Zeiten, zu denen jeder der Drei-Phasen-Ströme
iU ,
iV und
iW wiederholt eine Linie des Nullpegels kreuzt, bestimmt, wobei jede der angelegten Phasenspannungen in dem entsprechenden Integrationsbereich integriert wird, und der tatsächliche Leistungsfaktorwinkel wird aus einem Integrationswert, der zwischen null und einem maximalen Wert schwankt, berechnet.
-
Wie in 5B gezeigt ist, wird, wenn sich eine Magnetpolposition, die in der Einheit 13 geschätzt wird, von einer tatsächlichen Magnetpolposition um eine Positionsdifferenz Δθ unterscheidet, der tatsächliche Leistungsfaktorwinkel um eine Winkeldifferenz Δϕd, die der Positionsdifferenz Δθ entspricht, größer als der normale Leistungsfaktorwinkel ϕ*d.
-
Die in 4 gezeigte Steuereinheit steuert eine Phase einer Spannung, die an Statorwicklungen des Motors 10 angelegt ist, synchron zu einer Position (z. B. einer Magnetpolposition) des Rotors 20. Wenn sich daher eine geschätzte Magnetpolposition von einer tatsächlichen Magnetpolposition unterscheidet, wird der tatsächliche Leistungsfaktorwinkel von dem normalen Leistungsfaktorwinkel unterschieden.
-
Der Rechner 24 subtrahiert den normalen Leistungsfaktorwinkel ϕ*d von dem tatsächlichen Leistungsfaktorwinkel, um die Winkeldifferenz Δϕd zu erhalten. Eine Kompensiereinheit 25 korrigiert einen Wert der q-Achsen-Induktivität Lq basierend auf der Winkeldifferenz Δϕd, derart, dass ein tatsächlicher Leistungsfaktorwinkel, der basierend auf der korrigierten Induktivität Lq berechnet wird, im Wesentlichen mit dem normalen Leistungsfaktorwinkel übereinstimmt. Die Schätzeinheit 13 schätzt basierend auf der korrigierten Induktivität Lq eine Magnetpolposition.
-
Wie in 7 gezeigt ist, wird beispielsweise jedes Mal, wenn einer der Phasenströme iU , iV und iW eine Linie des Nullpegels kreuzt, die Induktivität Lq korrigiert, und eine Magnetpolposition wird basierend auf der korrigierten Induktivität Lq geschätzt. In diesem Fall kann sich, obwohl sich ein Ursprungswert Lo der Induktivität Lq stark von einem Wert Lt, der für den Motor 30 geeignet ist, unterscheidet, der Wert der Induktivität Lq allmählich dem geeigneten Lt durch wiederholtes Durchführen der Korrektur und der Schätzung nähern. Eine Magnetpolposition, die daher im Wesentlichen an die tatsächliche Magnetpolposition angepasst ist, kann zuverlässig geschätzt werden.
-
Zum Schluss wird bei diesem Ausführungsbeispiel, wenn eine Magnetpolposition in dem Motor 40 aus einer Sollspannung, die aus einer Solldrehgeschwindigkeit des Rotors bestimmt wird und an den Motor angelegt ist, einem Strom, der aus der Spannung erzeugt wird, und Parametern gemäß der nähernden Motormodellgleichung geschätzt wird, ein tatsächlicher Leistungsfaktorwinkel aus einer Differenz hinsichtlich der Phase zwischen der Sollspannung und dem erzeugten Strom berechnet, ein normaler Leistungsfaktorwinkel wird aus der Solldrehgeschwindigkeit und einem Drehmoment des Rotors, das aus dem erzeugten Strom geschätzt wird, berechnet, und ein Wert von mindestens einem der Parameter wird derart korrigiert, dass der tatsächliche Leistungsfaktorwinkel im Wesentlichen mit dem normalen Leistungsfaktorwinkel übereinstimmt. Wenn daher eine Magnetpolposition bei einem nächsten Zyklus aus der Sollspannung, dem erzeugten Strom und den Parametern, die den Parameter mit dem korrigierten Wert aufweisen, geschätzt wird, kann eine Phase der Sollspannung basierend auf der geschätzten Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition angepasst ist, gesteuert werden.
-
Auf die gleiche Art und Weise wie bei dem ersten Ausführungsbeispiel kann dementsprechend eine Berechnungsmenge zum Schätzen einer Magnetpolposition, die im Wesentlichen an eine tatsächliche Magnetpolposition angepasst ist, beträchtlich reduziert werden.