CN218255244U - 一种多连杆平行夹爪及物料转移设备 - Google Patents
一种多连杆平行夹爪及物料转移设备 Download PDFInfo
- Publication number
- CN218255244U CN218255244U CN202222769801.7U CN202222769801U CN218255244U CN 218255244 U CN218255244 U CN 218255244U CN 202222769801 U CN202222769801 U CN 202222769801U CN 218255244 U CN218255244 U CN 218255244U
- Authority
- CN
- China
- Prior art keywords
- clamping
- linear
- driving
- link parallel
- driving mechanism
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Abstract
本实用新型涉及物料夹持技术领域,具体公开一种多连杆平行夹爪及物料转移设备,包括:底板;两个夹片,两所述夹片相对设置,并均与所述底板滑动连接;Y形多连杆,所述Y形多连杆包括主驱动杆和两个分驱动杆;每一所述分驱动杆与一个所述夹片铰接,且两所述分驱动杆绕同一轴线与所述主驱动杆铰接;直线驱动机构,所述直线驱动机构安装于所述底板上,并位于两所述夹片的侧面;所述直线驱动机构的驱动端与所述主驱动杆传动连接;其中,两所述夹片具有受所述直线驱动机构正向驱动相互靠近的夹紧状态,以及具有受所述直线驱动机构反向驱动相互远离的松开状态。本实用新型提供的多连杆平行夹爪及物料转移设备,具有厚度尺寸较小的优点。
Description
技术领域
本实用新型涉及物料夹持技术领域,尤其涉及一种多连杆平行夹爪及物料转移设备。
背景技术
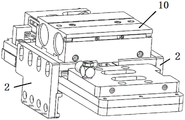
如图1所示,现有夹持装置一般包括:
夹爪气缸10,所述夹爪气缸10的底部设有两个驱动端;
两个夹片2,每个所述夹片2与一个所述驱动端连接。
当夹爪气缸10的两个驱动端相互靠近时,即可驱使两个夹片2夹紧工件;当夹爪气缸10的两个驱动端相互远离时,即可驱使两个夹片2释放工件。
现有夹持装置中,夹爪气缸10是位于夹片2的上方的,因此,整体厚度尺寸较大,当工作空间较为低矮时,现有夹持装置无法进入工作空间中夹持工件。
因此,需要对现有夹持装置进行改进,以解决其厚度尺寸较大的问题。
本背景部分中公开的以上信息仅被包括用于增强本公开内容的背景的理解,且因此可包含不形成对于本领域普通技术人员而言在当前已经知晓的现有技术的信息。
实用新型内容
本实用新型的一个目的在于,提供一种多连杆平行夹爪及物料转移设备,具有厚度尺寸较小的优点。
为达以上目的,一方面,本实用新型提供一种多连杆平行夹爪,包括:
底板;
两个夹片,两所述夹片相对设置,并均与所述底板滑动连接;
Y形多连杆,所述Y形多连杆包括主驱动杆和两个分驱动杆;每一所述分驱动杆与一个所述夹片铰接,且两所述分驱动杆绕同一轴线与所述主驱动杆铰接;
直线驱动机构,所述直线驱动机构安装于所述底板上,并位于两所述夹片的侧面;所述直线驱动机构的驱动端与所述主驱动杆传动连接;
其中,
两所述夹片具有受所述直线驱动机构正向驱动相互靠近的夹紧状态,以及具有受所述直线驱动机构反向驱动相互远离的松开状态。
可选的,还包括:
直线导轨,所述直线导轨固定设置于所述底板上;
两个滑块,两所述滑块均与所述直线导轨滑动连接,且每一所述夹片固定于一个所述滑块上。
可选的,所述直线导轨的长度方向与所述直线驱动机构的驱动方向相互垂直。
可选的,其中一个所述夹片靠近另一个所述夹片的侧面固设有弹簧顶针。
可选的,所述底板的下方安装有若干吸盘。
可选的,所述底板的下方设有定位板;
所述定位板上设有若干定位孔,每一所述吸盘位于一个所述定位孔中。
可选的,两所述夹片相互靠近的表面均设有保护垫。
另一方面,提供一种物料转移设备,包括机械手和由所述机械手驱动的所述多连杆平行夹爪。
可选的,所述机械手的末端连接有转接支架,所述转接支架上安装有两个所述多连杆平行夹爪。
本实用新型的有益效果在于:提供一种多连杆平行夹爪及物料转移设备,将直线驱动机构设置于夹片的侧面后,再使用Y形多连杆驱使两个夹片夹紧或者松开工件,这样的结构设计既能实现工件的夹持作业,又能避免因将直线驱动机构设置于夹片上方而导致的厚度尺寸过大问题。
附图说明
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
图1为背景技术提供的现有夹持装置的结构示意图;
图2为实施例提供的物料转移设备的结构示意图;
图3为实施例提供的多连杆平行夹爪的顶部结构示意图;
图4为实施例提供的多连杆平行夹爪的底部结构示意图.
图中:
100、转接支架;200a、第一多连杆平行夹爪;200b、第二多连杆平行夹爪;
1、底板;
2、夹片;
3、Y形多连杆;301、主驱动杆;302、分驱动杆;
4、直线驱动机构;
5、直线导轨;
6、弹簧顶针;
7、定位板;
8、吸盘;
9、保护垫;
10、夹爪气缸。
具体实施方式
为使得本实用新型的目的、特征、优点能够更加的明显和易懂,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,下面所描述的实施例仅仅是本实用新型一部分实施例,而非全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
在本实用新型的描述中,需要理解的是,当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中设置的组件。当一个组件被认为是“设置在”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中设置的组件。
此外,术语“长”“短”“内”“外”等指示方位或位置关系为基于附图所展示的方位或者位置关系,仅是为了便于描述本实用新型,而不是指示或暗示所指的装置或原件必须具有此特定的方位、以特定的方位构造进行操作,以此不能理解为本实用新型的限制。
以下将结合附图所示的具体实施方式对本实用新型进行详细描述。但这些实施方式并不限制本实用新型,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
本实用新型提供一种多连杆平行夹爪及物料转移设备,适用于对手机等工件进行夹持和位置转移的应用场景,其厚度尺寸较小,可在低矮的工作空间中作业。
参见图2,本实施例中,物料转移设备包括机械手、安装于机械手的末端的转接支架100和安装于该转接支架100上的两个多连杆平行夹爪。
将两个多连杆平行夹爪分别记作第一多连杆平行夹爪200a和第二多连杆平行夹爪200b,以将工件放入检测设备中进行功能检测为例,物料转移设备的工作过程如下:
S10:机械手将转接支架100移动至上料区,第一多连杆平行夹爪200a夹起一个未进行检测的工件;
S20:机械手将转接支架100移动至检测设备处,第二多连杆平行夹爪200b将检测设备中已经完成检测的工件夹起;接着,第一多连杆平行夹爪200a将未进行检测的工件放入检测设备中;
S30:机械手将转接支架100移动至下料区,第二多连杆平行夹爪200b将已经完成检测的工件放下。
重复执行S10~S30,即可依次进行多个工件的转移作业,且设置两个多连杆平行夹爪可以有效减少等待时间,提高生产效率。
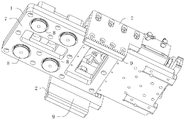
参见图3和图4,本实施例中,多连杆平行夹爪包括底板1、两个夹片2、Y形多连杆3、直线驱动机构4、直线导轨5以及两个滑块。
两所述夹片2相对设置,并均与所述底板1滑动连接。具体地,所述直线导轨5固定设置于所述底板1上;两所述滑块均与所述直线导轨5滑动连接,且每一所述夹片2固定于一个所述滑块上。
所述Y形多连杆3包括主驱动杆301和两个分驱动杆302;每一所述分驱动杆302与一个所述夹片2铰接,且两所述分驱动杆302绕同一轴线与所述主驱动杆301铰接。所述直线驱动机构4安装于所述底板1上,并位于两所述夹片2的侧面。所述直线驱动机构4的驱动端与所述主驱动杆301传动连接,且所述直线导轨5的长度方向与所述直线驱动机构4的驱动方向相互垂直。
本实施例中,当直线驱动机构4伸出时,两所述夹片2受所述直线驱动机构4正向驱动沿直线导轨5相互靠近地滑动,直至呈夹紧状态,以便夹紧工件;
当直线驱动机构4回缩时,两所述夹片2受所述直线驱动机构4反向驱动沿直线导轨5相互远离地滑动,直至呈松开状态,以便释放工件。
本实施例中,将直线驱动机构4设置于夹片2的侧面后,再使用Y形多连杆3驱使两个夹片2夹紧或者松开工件,这样的结构设计既能实现工件的夹持作业,又能避免因将直线驱动机构4设置于夹片2上方而导致的厚度尺寸过大问题,由于具有较小的厚度尺寸,故可在低矮的工作空间中作业,具有较高的灵活性。
可选的,其中一个所述夹片2靠近另一个所述夹片2的侧面固设有弹簧顶针6,以免两夹片2之间发生刚性碰撞导致损毁。
本实施例中,所述底板1的下方设有定位板7;所述定位板7上设有若干定位孔,每一个定位孔内设有一个吸盘8。可以理解的是,采用吸附和夹持双重固定的方式,有效降低工件掉落风险。
可选的,两所述夹片2相互靠近的表面均设有保护垫9,以免刮花工件的侧面。
本实施例中,机械手可以为四轴或者六轴结构等,此非本实用新型的重点,故不作赘述。进一步地,直线驱动机构4可以为伸缩气缸、电缸或者电机丝杆模组等,此非本实用新型的重点,亦不作赘述。
应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施方式中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
上文所列出的一系列的详细说明仅仅是针对本实用新型的可行性实施方式的具体说明,它们并非用以限制本实用新型的保护范围,凡未脱离本实用新型技艺精神所作的等效实施方式或变更均应包含在本实用新型的保护范围之内。
Claims (9)
1.一种多连杆平行夹爪,其特征在于,包括:
底板(1);
两个夹片(2),两所述夹片(2)相对设置,并均与所述底板(1)滑动连接;
Y形多连杆(3),所述Y形多连杆(3)包括主驱动杆(301)和两个分驱动杆(302);每一所述分驱动杆(302)与一个所述夹片(2)铰接,且两所述分驱动杆(302)绕同一轴线与所述主驱动杆(301)铰接;
直线驱动机构(4),所述直线驱动机构(4)安装于所述底板(1)上,并位于两所述夹片(2)的侧面;所述直线驱动机构(4)的驱动端与所述主驱动杆(301)传动连接;
其中,
两所述夹片(2)具有受所述直线驱动机构(4)正向驱动相互靠近的夹紧状态,以及具有受所述直线驱动机构(4)反向驱动相互远离的松开状态。
2.根据权利要求1所述的多连杆平行夹爪,其特征在于,还包括:
直线导轨(5),所述直线导轨(5)固定设置于所述底板(1)上;
两个滑块,两所述滑块均与所述直线导轨(5)滑动连接,且每一所述夹片(2)固定于一个所述滑块上。
3.根据权利要求2所述的多连杆平行夹爪,其特征在于,所述直线导轨(5)的长度方向与所述直线驱动机构(4)的驱动方向相互垂直。
4.根据权利要求1所述的多连杆平行夹爪,其特征在于,其中一个所述夹片(2)靠近另一个所述夹片(2)的侧面固设有弹簧顶针(6)。
5.根据权利要求1所述的多连杆平行夹爪,其特征在于,所述底板(1)的下方安装有若干吸盘(8)。
6.根据权利要求5所述的多连杆平行夹爪,其特征在于,所述底板(1)的下方设有定位板(7);
所述定位板(7)上设有若干定位孔,每一所述吸盘(8)位于一个所述定位孔中。
7.根据权利要求1所述的多连杆平行夹爪,其特征在于,两所述夹片(2)相互靠近的表面均设有保护垫(9)。
8.一种物料转移设备,其特征在于,包括机械手和由所述机械手驱动的权利要求1~7任一项所述的多连杆平行夹爪。
9.根据权利要求8所述的物料转移设备,其特征在于,所述机械手的末端连接有转接支架(100),所述转接支架(100)上安装有两个所述多连杆平行夹爪。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202222769801.7U CN218255244U (zh) | 2022-10-20 | 2022-10-20 | 一种多连杆平行夹爪及物料转移设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202222769801.7U CN218255244U (zh) | 2022-10-20 | 2022-10-20 | 一种多连杆平行夹爪及物料转移设备 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN218255244U true CN218255244U (zh) | 2023-01-10 |
Family
ID=84753433
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202222769801.7U Active CN218255244U (zh) | 2022-10-20 | 2022-10-20 | 一种多连杆平行夹爪及物料转移设备 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN218255244U (zh) |
-
2022
- 2022-10-20 CN CN202222769801.7U patent/CN218255244U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN212553899U (zh) | 一种一体式机器人手爪传动机构 | |
| CN111702799B (zh) | 机械手及其夹取装置 | |
| CN212502534U (zh) | 组装系统 | |
| CN111731839B (zh) | 夹取提升机构 | |
| CN219213171U (zh) | 一种多工位复合机械手及移运设备 | |
| CN108127976B (zh) | 一种袋体穿绳方法 | |
| CN216638060U (zh) | 装夹装置 | |
| CN212863098U (zh) | 夹取提升机构 | |
| CN212601913U (zh) | 机械手及其夹取装置 | |
| CN218255244U (zh) | 一种多连杆平行夹爪及物料转移设备 | |
| CN111702800A (zh) | 夹取装置及其夹爪组件 | |
| CN213703470U (zh) | 夹取装置及其夹爪组件 | |
| CN210147613U (zh) | 多功能夹爪装置 | |
| CN207915499U (zh) | 直线电机式片材运载装置 | |
| CN218984838U (zh) | 一种薄壁件负压吸盘式工业机器人手爪 | |
| CN217912527U (zh) | 带机械手臂自动化冲压移送装置 | |
| CN220165160U (zh) | 打标转运装置及打标加工设备 | |
| CN217413045U (zh) | 一种用于通讯产品的全自动组装设备 | |
| CN110641991A (zh) | 一种用于管件的复合夹具 | |
| CN209755259U (zh) | 机械手爪 | |
| CN215358518U (zh) | 多尺寸钢管接箍的抓取装置 | |
| CN218099488U (zh) | 一种柔性pcba性能测试设备 | |
| CN218136140U (zh) | 预装体自动组装装置 | |
| CN218450545U (zh) | 一种音圈引线自动绕弧形定位的辅助治具 | |
| CN214163042U (zh) | 一种功率模块总成机械手夹具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |