CN1308213C - 用于防止电梯轿厢出现不允许的高的运行速度的方法 - Google Patents
用于防止电梯轿厢出现不允许的高的运行速度的方法 Download PDFInfo
- Publication number
- CN1308213C CN1308213C CNB02813575XA CN02813575A CN1308213C CN 1308213 C CN1308213 C CN 1308213C CN B02813575X A CNB02813575X A CN B02813575XA CN 02813575 A CN02813575 A CN 02813575A CN 1308213 C CN1308213 C CN 1308213C
- Authority
- CN
- China
- Prior art keywords
- speed
- lift car
- velocity limit
- limit value
- monitoring device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/34—Details, e.g. call counting devices, data transmission from car to control system, devices giving information to the control system
- B66B1/36—Means for stopping the cars, cages, or skips at predetermined levels
- B66B1/44—Means for stopping the cars, cages, or skips at predetermined levels and for taking account of disturbance factors, e.g. variation of load weight
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/28—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical
- B66B1/285—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration electrical with the use of a speed pattern generator
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Elevator Control (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Lasers (AREA)
Abstract
本发明涉及一种防止电梯轿厢出现不允许的高的运行速度的方法,其中通过至少一个在电梯轿厢(8)的整个运行路径范围内的测量系统(20,21)将有关电梯轿厢的实际位置和运行速度的信息传递给速度监视装置(24),速度监视装置(24)对实际运行速度与一个速度极限值(28)或三个速度极限值(28.1,28.2,28.3)中的一个极限值持续地进行比较,和当电梯轿厢(8)的运行速度超过所述速度极限值(28)或所述三个速度极限值(28.1,28.2,28.3)中的一个速度极限值时,将激活制动措施,其中速度监视装置(24)至少一个接一个地启用三种不同的制动措施。本发明避免了对安全制动装置不必要的启用。
Description
技术领域
本发明涉及一种用于防止电梯轿厢出现不允许的高的运行速度的方法。
背景技术
有关电梯制造和工作的规范要求必须采用在电梯运行的任何阶段以最高的安全性可以避免电梯轿厢出现不允许的高的运行速度的装置和方法。
习用的电梯配备有安全制动装置,当电梯轿厢的运行速度超过定义的速度极限值时,由限速器激活所述装置,和电梯轿厢被以最可靠的迟滞制动和停止运行。
在US6,170,614B1中披露了一种电子限速系统,所述电子限速系统从一个位置测量装置持续地获得有关电梯轿厢的实际位置的信息并根据这些信息计算出电梯轿厢的实际速度。由一微处理机对该实际速度持续地与固定编程的在整个运行范围相同的极限值进行比较,所述极限值与电梯特定的工作方式,例如上行运行或下行运行配合。当电梯轿厢的实际速度超过瞬时有效的极限值时,电子限速系统激活电磁控制的安全制动系统,停止电梯轿厢的运行。
所述的电子限速系统的主要缺点在于:每次当检测出超过有效的极限值时,将导致安全制动装置的释放并随之导致电梯工作中断,其中在专业人员将电梯重新恢复工作或将电梯轿厢置于入口范围处之前,乘客大多不能离开电梯。因此每次限速都会导致以在最可靠范围内的迟滞值对电梯轿厢的制动,此点将导致乘客非常不适、惧怕,和对老弱的人员将意味着甚至有可能受到伤害的危险。
发明内容
本发明的方法的目的在于提出一种用于防止电梯轿厢不允许的高的运行速度出现的方法,利用所述方法在部分检测出超速的情况下避免工作的中断,使乘客尽可能不被关在电梯内并且只在极其紧急的情况下才由安全制动装置施加剧烈的迟滞作用。
实现本发明的技术方案如下:
一种防止电梯轿厢出现不允许的高的运行速度的方法,其中通过至少一个在电梯轿厢的整个运行路径范围内的测量系统将有关电梯轿厢的实际位置和运行速度的信息传递给速度监视装置,速度监视装置对实际运行速度与一个速度极限值或三个速度极限值中的一个速度极限值持续地进行比较,和当电梯轿厢的运行速度超过所述速度极限值或所述三个速度极限值中的一个速度极限值时,将激活制动措施,其特征在于,速度监视装置至少一个接一个地启用三种不同的制动措施。
本发明的方式实现的优点主要在于,提高了电梯设备的可用度,并且通过尽可能在一定程度上避免安全制动,一方面可以使电梯的使用者不会受到不必要的惊吓和被关在电梯轿厢内,并且另一方面不会出现在安全制动后为解除电梯的制动付出代价。
根据本发明一优选的实施方式,由速度监视装置分别释放一特定的制动措施,一旦与该特定的制动措施相对应的速度极限值被超过的话。采用这种方法可以实现一种以安全和简单方式的多级的速度监视装置。
根据本发明的费用低廉的实施方式可以分别启用另一种制动措施,一旦在先的制动措施不能在定义的时间内导致定义的减速的话。
本发明的一种安全技术的特别有益的进一步设计在于,分别启用另一制动措施,一旦与该制动措施相对应的速度极限值被超过的话,或一旦在先的制动措施不能在一定的时间内导致实现定义的减速的话。其中同时对两种标准进行监视,和一旦两个标准中的一个标准得到满足,将启用另一制动措施。
对那些具有带速度调节装置的驱动机的电梯,本发明方法特别有益的设计在于,所述制动措施中的一种制动措施在于,速度监视装置试图对速度调节装置施加影响,从而使速度调节装置减少电梯轿厢的驱动速度。因而在大多数的情况下可以避免对电梯的机械摩擦制动和停止电梯的运行。
上述方法的设计经验证是特别简单和有益的,其中通过如下措施降低了电梯轿厢的驱动速度,将一个固定存储的速度额定值加在速度调节装置的额定值输入端。
另一个应用本发明的方法适用的制动措施在于,在一个具有驱动装置和主动轮的缆索驱动的电梯中激活一个直接或间接作用于主动轮的机电驱动制动器或摩擦制动器,所述机电驱动制动器或摩擦制动器将降低电梯轿厢的运行速度或停止电梯轿厢的运行,其中首先将驱动装置断开。采用此方式以最大的安全性对电梯轿厢进行制动,从而在大多数情况可以避免采用安全制动装置。
在一个液压驱动的电梯设备中采用本发明的方法时,有益的制动措施在于,速度监视装置通过一个单独的流量控制阀对液压介质的流量递增地进行限制或激活一个作用于液压升降机的活塞杆的制动钳,以此可以降低承载装置的运行速度或停止承载装置的运行。
根据本发明方法的另一有益的进一步设计,制动措施在于,由速度监视装置激活安全制动装置,所述安全制动装置设置在电梯轿厢上,和一旦安全制动装置被激活,将作用于沿运行路径被固定安装的导轨并使电梯轿厢停止运行。
本发明的方法的一特别有益的设计在于,速度监视装置将实际的运行速度与与各个制动措施相对应的速度极限值持续地进行比较,所述速度极限值取决于电梯轿厢的实际位置并在运行路径的两个端范围对运行速度必要的减速加以考虑。另外速度极限值还取决于特殊的运行方式(例如载荷运行、检验、故障方式等)。因此在电梯轿厢的运行路径的两个端范围内的传统的迟滞控制装置已经没有必要。另外因此也可以省去避免传统的电梯在下面和上面的运行路径端的硬撞击的缓冲器或将缓冲器做得较小,其原因在于,出于对故障安全的考虑在运行路径的端范围内可以对通过控制促使产生的迟滞进行监视。
根据有益的实施方式,速度监视装置将实际的运行速度与与各个制动措施相对应的速度极限值持续地进行比较,所述速度极限值针对电梯轿厢在运行路径上的每个位置,必要时根据瞬时激活的特殊的工作方式,以固定定义和电子方式例如存储在表格内。固定存储的与位置相关的速度极限值将使本发明的方法具有很高的功能安全性。
本发明方法的另一有益的设计在于,速度监视装置将实际的运行速度与与各个制动措施相对应的速度极限值持续地进行比较,通过一个安装在速度监视装置中的微处理机持续地根据电梯轿厢的实际位置对所述速度极限值进行计算。其中一方面考虑到了取决于位置固定编程的速度极限值,另一方面考虑到了由电梯控制单元提供的有关运行过程,特别是有关在楼层停靠时减速的信息。此点的优点是,速度监视装置也在减速的该范围内起作用。
本发明的附加的有益的进一步设计在于,在采取一个由于超速引发的顺利的制动措施后,电梯自动地重新恢复正常工作或被置于疏散工作,只要最后的制动措施的方式以及自动进行的对安全相关的部件的功能检验容许此点。
本发明的方法一种特殊有益的设计在于,所有参与本发明的方法的功能都在采用故障安全的方案的情况下进行。所述故障安全方案包括例如冗余的位置-和/或速度测量装置、根据故障安全设计的用于激活制动装置的执行元件、在数据传输时的数据安全方法、通过采用多个,有时可能不同的处理器进行的结果比较的冗余数据处理等。在出现不一致时将启用相应的安全措施。通过在本发明方法中采用安全故障方案可以省去昂贵的机械的限速系统以及在电梯轿厢的运行路径端的两个范围内的附加的迟滞控制电路。
附图说明
下面将对照例子并结合附图对本发明做进一步的说明。图中示出:
图1A为具有缆索驱动装置的电梯设备的示意图,其中仅示出与本发明有关的重要的电梯部件;
图1B为具有液压驱动装置的电梯设备的示意图,其中仅示出与本发明有关的重要的电梯部件;
图2、3示出在正常运行时的速度曲线与采用本发明方法的速度极限值之间的关系;
图4、5示出采用唯一一个速度-极限值曲线的方法过程;
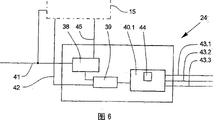
图6为采用唯一一个速度-限制值曲线时的速度监视装置的示意图;
图7、8示出采用多个速度-极限值曲线的方法过程,和
图9为采用多个速度-限制值曲线时的速度监视装置的示意图。
具体实施方式
图1A为具有缆索驱动装置的电梯设备的示意图。图中示出具有机房2和楼层入口3的电梯竖井1。在机房2内设置有一个驱动机4,所述驱动机通过一个主动轮5和一个承载缆索6对一个在导轨7上被导向的电梯轿厢8曳引和驱动。驱动机4具有一个带有机电驱动制动器10的驱动电机9。由一个速度调节装置14对驱动电机9的旋转方向、转速和驱动力矩进行调整,其中速度调节装置由电梯控制单元15获得控制指令。在电梯轿厢8上安装有两个例如电磁激活的安全制动装置18,采用所述安全制动装置在应急情况下可以对电梯轿厢8进行制动和停止运行。用20表示在电梯轿厢8的整个运行路径上延伸的刻度尺,所述刻度尺具有多个二进制编码的平行的代码-道。由一个固定在电梯轿厢8上的位置检测装置21对所述的代码-道进行扫描,所述检测装置根据二进制信号状态持续地对电梯轿厢8的实际绝对位置进行译码并传递给电梯控制单元15。通过在时间上对位置值差的微分在电梯控制单元15中计算出电梯轿厢15的实际运行速度,所述实际运行速度另外作为起着对驱动电机9的速度调节装置14的实际值-反馈的作用。速度监视装置24的任务是对电梯轿厢8的不允许的高的运行速度进行检测和必要时启用相应的对抗措施。如图1A所示,电梯控制单元15、速度调节装置14和速度监视装置24通过信号-和/或数据线路相互连接,但也不排除将所述装置共同安装在一个较大的单元内。一方面在这些装置之间的数据和信号传输和另一方面在位置检测装置21以及安全制动装置18之间的数据和信号传输是通过一根在电梯轿厢8和竖井壁之间脱卷的悬挂电缆25实现的。
图1B为具有液压驱动装置的电梯设备的示意图。图中示出具有机房2和楼层入口3的电梯竖井1。在机房2内设置有一个液压驱动单元50,所述液压驱动单元对液压升降机51的活塞杆52进行驱动,所述活塞杆在其上端具有一个换向轮53。承载缆索54绕过所述换向轮,所述承载缆索的一端固定在升降机51上的固定点55上和利用另一端对电梯轿厢8进行曳引和驱动,所述电梯轿厢在导轨7上被导向。驱动单元50具有一个速度调节装置14,所述速度调节装置例如通过调节泵56对用于移动升降机51的油流的量和方向进行确定,其中速度调节装置14由电梯控制单元15获得控制指令。在电梯轿厢8上安装有两个例如电磁激活的安全制动装置18,采用所述安全制动装置在应急情况下,例如当承载缆索断裂时,可以对电梯轿厢8进行制动和停止运行。在升降机缸57的上端固定有一个电磁激活的作用于活塞杆52的制动钳58。从x部分的详图中可以看出,在磁铁59无电流时在制动钳58与活塞杆52之间通过压缩弹簧60的力可以产生制动的力。所述制动力例如在液压驱动装置的速度调节失效时可以对电梯轿厢8进行制动。所述磁铁59被速度监视装置24控制。液压驱动单元50除了其它的阀门外具有一个安全-流量控制阀61,所述安全-流量控制阀当检测出电梯轿厢8超速时被速度监视装置24激活,其中安全-流量控制阀在这样一种情况下连续地减少油流量,从而利用定义的迟滞对电梯轿厢8进行制动。用20表示在电梯轿厢8的整个运行路径上延伸的刻度尺,所述刻度尺具有多个二进制编码的平行的代码-道。由一个固定在电梯轿厢8上的位置检测装置21对所述的代码-道进行扫描,所述检测装置根据二进制信号状态持续地对电梯轿厢8的实际绝对位置进行译码并传递给电梯控制单元15。通过在时间上对位置值差的微分在电梯控制单元15中计算出电梯轿厢15的实际运行速度,所述实际运行速度另外起着对驱动电机9的速度调节装置14的实际值-反馈的作用。速度监视装置24的任务是对电梯轿厢8的不允许的高的运行速度进行检测和必要时启用相应的对抗措施。如图1B所示,电梯控制单元15、速度调节装置14和速度监视装置24通过信号-和/或数据线路相互连接,但也不排除将所述装置共同安装在一个较大的单元内。一方面在这些装置之间的数据和信号传输和另一方面在位置检测装置21以及安全制动装置18之间的数据和信号传输是通过一根在电梯轿厢8和竖井壁之间脱卷的悬挂电缆25实现的。
图2为一个曲线图,所述曲线图的纵轴表示运行路径(竖井内的位置)和其横轴表示电梯轿厢8的运行速度,所述曲线示出了在正常运行时的速度曲线与被速度监视装置24监视的速度-极限值之间的关系。图中绘制了具有中间停靠运行时正常运行速度曲线27以及速度-极限值曲线28,所述曲线也包含在两个运行路径-端范围内绝对必要的减速。在本实施方式中针对电梯轿厢8在电梯竖井1内的每个位置将速度极限值曲线28的值在速度监视装置24固定地,例如以表格方式编程。根据速度监视方法的实施,一个或多个与不同的制动措施配合的不同的速度极限值曲线28被存储。根据在任何情况下被启用的特殊的工作方式(例如载荷运行、检验、故障方式等),这些取决于位置的速度-极限值曲线可以以不同的方式伸展。
图3示出一个与图2相同的曲线图,但其中在运行路径-端范围之间的范围内的速度-极限值曲线28附加考虑了在中间停靠楼层停靠时的速度曲线。在速度监视装置24中根据速度额定值-信息持续地计算出这些范围的极限值,所述信息是由电梯控制单元15提供的。而且在此也可以采用具有不同的容许的偏差的多个额定值曲线,根据在任何情况下被启用的工作方式(例如载荷运行、检验、故障方式等)曲线的伸展也可以不同,但在图中未示出。
图4和5在路径/速度-曲线图中示出本发明方法的过程,但其中只有一条速度-极限值曲线。在图4中用27示出(用于比较)表示具有正常运行速度曲线和用28表示速度-极限值曲线。图中绘制的实际-速度29在运行路径-端范围外曲线点30处超过速度极限值曲线28。速度监视装置24识别出此点并激活第一制动措施,即在本例中所述措施试图促使速度调节装置14采用预定的迟滞,根据调节器制动曲线33降低驱动速度。该第一制动措施不必非得导致电梯停止运行。当利用速度调节装置14的制动措施使运行速度低于速度极限值曲线28时,和当一个安装在电梯控制单元15内的系统测试装置没有发出相关的故障信号时,则电梯可以根据程序继续运行。在从激活第一制动措施时刻开始的确定的短暂的时间后,速度监视装置24检查速度极限值曲线28是否仍被超过,并且在必要时(在曲线点31)激活第二制动措施(图1A中示出的作用于驱动电机9的机电驱动制动器10或如图1B所示的作用于活塞杆52的制动钳58),从而使电梯根据驱动制动曲线34被制动。当速度监视装置24在经过另一短暂的等候时间判定仍然超过速度-极限值曲线28,则(在曲线点32)启用一个根据本实施例最后的制动措施,即激活机电释放的安全制动装置18,所述安全制动装置根据安全制动曲线35使电梯停止运行。
图5在路径/速度-曲线图中示出,当电梯的实际-速度29在运行路径-端范围或楼层停靠-范围内尚未超过额定速度,但在此由于例如在此必要的实际-速度的降低未出现,因而超过下降的速度-极限值曲线时,采用本发明方法时用唯一一个速度-极限值曲线28是如何启用制动措施的。在点30上当由速度监视装置24启用第一制动措施后,则进行与结合图4所述相同的过程。
图6示意示出本发明的用于采用唯一一个速度-极限值曲线28的方法的速度监视装置24。所述速度监视装置主要由一个极限值模块38、一个比较器39和一个具有时钟44的反应发生器40.1构成。速度监视装置24一方面通过其位置数据输入端41不间断地获得有关电梯轿厢8在电梯竖井内的实际位置的由位置检测装置21产生的信息。另一方面速度监视装置通过其实际-速度输入端42获得来自电梯控制单元15的有关电梯的实际-速度的信息。由存储在极限值模块38的表格持续地读出分配给每个竖井位置的速度-极限值并与实际的速度进行比较。一旦和只要比较器39确定实际的实际-速度超过根据位置确定的实际的速度-极限值,比较器39将向反应发生器40.1发出一个相应的超速信号。该超速信号通过比较器的一个制动信号-输出端43.1、43.2、43.3立刻启用第一制动措施,即一个固定存储的速度额定值或一个固定存储的迟滞额定值被加在速度调节装置14的额定值输入端。同时用一设定的等候时间启动时钟44。当等候时间后仍然存在超速信号,则反应发生器40.1激活下一个制动措施并重新启动时钟44。在第二个等候时间后仍然超过速度-极限值,则激活最后的制动措施或安全制动装置。
根据本发明的方法的实施变型方案,由极限值模块38向比较器39输出的速度-极限值28并不总是与在极限值模块的表格固定存储的取决于位置的速度-极限值相符的,而是存储的速度-极限值在电梯控制单元15预定的减速-额定值的范围内,通过一个安装在极限值模块38的处理机对该减少的额定值连续地进行适配调整。此点尤其发生在停靠在楼层时的情况。极限值模块通过数据线路45由电梯控制单元15获得为此必要的信息。
当然本发明的方法也适用于具有三个以上的不同的制动措施的电梯设备。
图7和8在路径/速度-曲线图中示出本发明方法的过程,具有多条速度-极限值曲线28,所述曲线分别对应于不同的制动措施。在图7中曲线图旨在比较,含有曲线27,所述曲线示出表示正常运行速度曲线另外还绘制有三条速度-极限值曲线28。一个假设的实际-速度29高于额定速度和在运行路径-端范围或在楼层停靠范围外在曲线点46处超过速度极限值曲线28.1。速度监视装置24识别出此点并激活第一制动措施,即在本例中所述措施试图促使速度调节装置14采用预定的迟滞根据调节器制动曲线33降低驱动速度。该第一制动措施此时不必非得导致电梯停止运行。当第二速度-极限值曲线28.2尚未被超过和安装在电梯控制单元15内的系统测试装置没有发出相关的故障信号,电梯可以按照程序继续运行。但如果第一制动措施不起作用或不能充分起作用,从而使第二速度-极限值曲线28.2也被超过,速度监视装置24在曲线点47激活第二制动措施(如图1A中示出的作用于驱动电机9的作为机电驱动制动器10或如图1B所示的作用于活塞杆52的制动钳58),从而使电梯根据驱动制动曲线34被制动,停止运行。当该制动措施不能或不能充分地降低速度时,则速度监视装置24在曲线点48启用一个根据本实施例最后的制动措施,即激活机电释放的安全制动装置18,所述安全制动装置根据安全制动曲线35使电梯停止运行。
图8在路径/速度-曲线图中示出,假设电梯的实际-速度29尚未超过额定速度,在运行路径-端范围或楼层停靠-范围内超过一个或多个在此下降的速度-极限值曲线28.1、28.2、28.3时,由于例如在此必要的实际-速度的降低未出现,采用本发明方法是如何用多个个速度-极限值曲线28.1、28.2、28.3启用制动措施的。在曲线点30上当由速度监视装置24启用第一制动措施后,则进行与结合图7所述相同的过程。
图9示意示出本发明的电子速度监视装置24,所述装置适用于结合图7和8所述的具有多个速度-极限值曲线28.1、28.2、28.3的方法。所述装置与上述结合图6所述的速度监视装置24相同,主要由相同的模块构成,但其中为每个有待监视的速度极限值曲线28.1、28.2、28.3分别设有一个极限值模块和一个比较器。所述装置还包含三个极限值模块38.1、38.2、38.3和三个比较器39.1、39.2、39.3以及一个共同的的反应发生器40.2。速度监视装置24一方面通过其位置数据输入端41不间断地获得有关电梯轿厢8在电梯竖井内的实际位置的由位置检测装置21产生的信息。另一方面速度监视装置通过其实际-速度输入端42连续地获得来自电梯控制单元15的有关电梯的实际-速度的信息。在三个极限值模块38.1、38.2、38.3中的每一个模块中的每一个表格内存储有取决于位置的速度-极限值,其中分别在一个表格内包含的值分别构成一个在图7和8中所示的三条速度极限值曲线值曲线28.1、28.2、28.3中的一条,即每个表格分别与三种不同的制动措施中的一个对应并且针对在竖井内的电梯的每个位置包含有一个分配给该制动措施的速度极限值。
在电梯运行时,由三个存储在极限值模块38.1、38.2、38.3内的表格中的每个表格中持续地读出三个不同的制动措施的与电梯轿厢8的实际的竖井位置相对应的速度极限值并且分别在一个与极限值模块38.1、38.2、38.3配合的比较器39.1、39.2、39.3中与实际-速度进行比较。一旦和只要其中的一个比较器39.1、39.2、39.3确定出实际的实际-速度超过存储在分别相对应的表格中的取决于位置的速度-极限值,则比较器向反应发生器40.2发出一个超速信号。所述超速信号通过比较器的一个制动信号输出端43.1、43.2、43.3立刻激活三个可能的制动措施中的某个制动措施,所述制动措施是与发送信号的比较器和相应的极限值模块相对应的。
根据本发明的结合图9所述的具有多个不同的速度-极限值曲线28.1、28.2、28.3的方法的实施变型方案,由三个极限值模块38.1、38.2、38.3向比较器39.1、39.2、39.3输出的速度-极限值并不总是与在极限值模块的表格固定存储的取决于位置的速度-极限值相符的,而是存储的速度-极限值在电梯控制单元15预定的减速-额定值的运行路径-范围内,通过安装在极限值模块38.1、38.2、38.3的处理机对该减少的额定值连续地进行适配调整。此点尤其发生在在楼层停靠时的情况。极限值模块38.1、38.2、38.3通过数据线路45由电梯控制单元15获得为此必要的信息。
当然结合图9所述的整个方法也适用于具有三种以上不同的制动措施的电梯。
可以实现一种特别可以满足高的安全要求的速度监视方法,其中可以将具有根据图4、5、6的取决于时间的反应控制的方法与根据图7、8、9的多个不同的速度-极限值曲线28结合在一起,其中如果在先的制动措施不能在一确定的时间内导致确定的减速,或如果超过与另一种制动措施相对应的取决于位置的速度极限值,则将分别启用另一制动措施。
为了使本发明的方法可以满足对电梯系统的高的安全要求,至少安全实施地实现所有参与激活安全制动装置的功能。用于实现这种“故障安全”方案的相应的措施对专业人员是已知的,例如包括:
-对位置-或速度检测装置、数据处理机、用于激活制动装置的执行元件等的冗余配置;
-用于数据传输的数据安全方法;
-采用多个,有时不同的处理机进行并列的数据处理,采用结果比较和在出现故障时启用相应的安全措施。
为了即使在断电或内部控制电源失效时也能确保方法实施,在出现故障时采用相应的应急电源装置,例如利用电池或蓄电池对本发明的方法重要的电路馈电。
Claims (15)
1.一种防止电梯轿厢(8)出现不允许的高的运行速度的方法,其中通过至少一个在电梯轿厢(8)的整个运行路径范围内的测量系统(20、21)将有关电梯轿厢的实际位置和运行速度的信息传递给速度监视装置(24),速度监视装置(24)对实际运行速度与一个速度极限值(28)或三个速度极限值(28.1、28.2、28.3)中的一个速度极限值持续地进行比较,和当电梯轿厢(8)的运行速度超过所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)中的一个速度极限值时,将激活制动措施,其特征在于,速度监视装置(24)至少一个接一个地启用三种不同的制动措施。
2.按照权利要求1所述的方法,其特征在于,一旦与该制动措施相对应的所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)中的一个速度极限值被超过的话,分别启用所述制动措施中的一个。
3.按照权利要求1所述的方法,其特征在于,分别启用另一制动措施,一旦在先的制动措施不能在一定的时间内导致实现定义的减速的话。
4.按照权利要求1所述的方法,其特征在于,分别启用另一制动措施,一旦与该制动措施相对应的所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)中的一个被超过的话,或一旦在先的制动措施不能在一定的时间内导致实现定义的减速的话。
5.按照权利要求1至4中任一项所述的方法,其特征在于,在一个电梯中,所述电梯具有带速度调节装置(14)的电梯轿厢(8)的驱动机(4),制动措施在于,速度监视装置试图对驱动机(4)的速度调节装置(14)施加影响,从而通过速度调节装置降低电梯轿厢(8)的驱动速度。
6.按照权利要求5所述的方法,其特征在于,采用如下方式实现电梯轿厢(8)的驱动速度的降低,将一固定存储的速度额定值或一个固定存储的迟滞额定值加在速度调节装置(14)的额定值输入端。
7.按照权利要求1至4中任一项所述的方法,其特征在于,在一具有包括有驱动电机(9)的驱动机(4)的缆索曳引电梯中通过速度监视装置(24)对在驱动电机(9)上的机电驱动制动器(10)进行激活。
8.按照权利要求1至4中任一项所述的方法,其特征在于,在一个具有在导轨(7)上被导向的电梯轿厢(8)的电梯中,另一制动措施在于,由速度监视装置(24)激活位于电梯轿厢(8)与电梯轿厢的导轨(7)之间的摩擦制动器。
9.按照权利要求1至4中任一项所述的方法,其特征在于,在液压驱动的电梯中分别另一制动措施在于,由速度监视装置(24)通过流量控制阀(61)确定促使液压升降机(51)移动的液压介质的流量,液压介质的流量被逐步限制,或者由速度监视装置(24)激活一作用于液压升降机(51)的活塞杆(52)的制动钳(58)。
10.按照权利要求1至4中任一项所述的方法,其特征在于,制动措施在于,由速度监视装置(24)至少激活安全制动装置(18),所述安全制动装置设置在电梯轿厢(8)上并作用于沿运行路径固定安装的导轨(7)和使电梯轿厢(8)停止运行。
11.按照权利要求1至4中任一项所述的方法,其特征在于,由速度监视装置(24)连续地对实际运行速度(29)与与制动措施相对应的所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)进行比较,所述速度极限值取决于电梯轿厢(8)的实际位置并包含在运行路径的端范围内必要的降低运行速度。
12.按照权利要求1至4中任一项所述的方法,其特征在于,由速度监视装置(24)连续地对实际运行速度(29)与与制动措施相对应的所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)进行比较,针对电梯轿厢(8)在运行路径上的每个位置固定确定所述速度极限值并对所述速度极限值进行存储。
13.按照权利要求1至4中任一项所述的方法,其特征在于,由速度监视装置(24)连续地对实际运行速度(29)与与制动措施相对应的所述速度极限值(28)或所述三个速度极限值(28.1、28.2、28.3)进行比较,由微处理机根据电梯轿厢(8)的实际位置,考虑到固定编程的速度极限值(28)以及来自电梯控制单元(15)的有关计划的运行过程的信息计算出速度极限值。
14.按照权利要求1至4中任一项所述的方法,其特征在于,在由超速启用的成功的制动措施后,电梯被重新恢复正常工作或采取疏散工作,只要最后的制动措施的方式以及一自动进行的对安全相关的部件进行的功能检验的结果对此是容许的。
15.按照权利要求1至4中任一项所述的方法,其特征在于,针对对电梯轿厢的位置和运行速度的检测、对运行速度与速度极限值的比较以及对制动措施的激活,采取广泛的故障安全-方案。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP01810654.2 | 2001-07-04 | ||
| EP01810654 | 2001-07-04 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1524057A CN1524057A (zh) | 2004-08-25 |
| CN1308213C true CN1308213C (zh) | 2007-04-04 |
Family
ID=8184004
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB02813575XA Expired - Lifetime CN1308213C (zh) | 2001-07-04 | 2002-06-27 | 用于防止电梯轿厢出现不允许的高的运行速度的方法 |
Country Status (13)
| Country | Link |
|---|---|
| US (1) | US7117979B2 (zh) |
| EP (1) | EP1401757B2 (zh) |
| JP (2) | JP2005515134A (zh) |
| CN (1) | CN1308213C (zh) |
| AT (1) | ATE348779T1 (zh) |
| BR (1) | BR0210750B1 (zh) |
| CA (1) | CA2448538C (zh) |
| DE (1) | DE50209017D1 (zh) |
| DK (1) | DK1401757T4 (zh) |
| ES (1) | ES2278027T5 (zh) |
| HK (1) | HK1065014A1 (zh) |
| PT (1) | PT1401757E (zh) |
| WO (1) | WO2003004397A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107673148A (zh) * | 2016-08-02 | 2018-02-09 | 通力股份公司 | 调节调平速度极限的方法、电梯控制单元和电梯系统 |
Families Citing this family (54)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100564217C (zh) * | 2003-11-18 | 2009-12-02 | 奥蒂斯电梯公司 | 电梯调速装置 |
| JP4368854B2 (ja) | 2003-11-21 | 2009-11-18 | 三菱電機株式会社 | エレベータ装置 |
| CN100542926C (zh) * | 2004-03-30 | 2009-09-23 | 三菱电机株式会社 | 电梯控制装置 |
| JP4668186B2 (ja) * | 2004-04-06 | 2011-04-13 | 三菱電機株式会社 | エレベータ装置 |
| EP1739046B1 (en) * | 2004-04-20 | 2011-06-15 | Mitsubishi Denki Kabushiki Kaisha | Emergency stop system of elevator |
| EP1741656B2 (en) † | 2004-04-27 | 2015-06-17 | Mitsubishi Denki Kabushiki Kaisha | Elevator apparatus |
| US7650966B2 (en) * | 2004-06-21 | 2010-01-26 | Otis Elevator Company | Elevator system including multiple cars in a hoistway, destination entry control and parking positions |
| EP1792865B1 (en) * | 2004-09-09 | 2013-06-26 | Mitsubishi Denki Kabushiki Kaisha | Elevator apparatus |
| US8307952B2 (en) * | 2004-12-16 | 2012-11-13 | Otis Elevator Company | Elevator system with multiple cars in a hoistway |
| MY192706A (en) | 2004-12-17 | 2022-09-02 | Inventio Ag | Lift installation with a braking device, and method for braking and holding a lift installation |
| BRPI0419271A (pt) * | 2004-12-29 | 2008-01-22 | Otis Elevator Co | sistema de elevador e método de compensar desequilìbrio de carga em um sistema de elevador |
| ES2293392T5 (es) * | 2005-01-07 | 2011-07-20 | Thyssenkrupp Elevator Ag | Ascensor con sistema de control. |
| EP1853506B1 (en) * | 2005-02-04 | 2011-11-02 | Otis Elevator Company | Announcements indicating one car is waiting for another car in the same hoistway |
| US7784588B2 (en) * | 2005-02-04 | 2010-08-31 | Otis Elevator Company | Calls assigned to one of two cars in a hoistway to minimize delay imposed on either car |
| CN100554120C (zh) * | 2005-02-17 | 2009-10-28 | 奥蒂斯电梯公司 | 将轿厢去往底坑或者顶部的运行告知电梯乘客的方法 |
| WO2006088456A1 (en) * | 2005-02-17 | 2006-08-24 | Otis Elevator Company | Collision prevention in hoistway with two elevator cars |
| CN101128383B (zh) * | 2005-02-25 | 2010-10-13 | 奥蒂斯电梯公司 | 具有成角度设置的下悬式挂绳布置的电梯轿厢 |
| EP1698580B1 (de) | 2005-03-05 | 2007-05-09 | ThyssenKrupp Aufzugswerke GmbH | Aufzuganlage |
| EP2660181B1 (en) * | 2005-03-30 | 2021-02-17 | Mitsubishi Denki Kabushiki Kaisha | Elevator apparatus with overspeed detection device and car position detection. |
| JP2006298645A (ja) * | 2005-04-21 | 2006-11-02 | Inventio Ag | エレベータケージの速度を監視するための方法および検出システム |
| JP4705407B2 (ja) * | 2005-05-13 | 2011-06-22 | 株式会社日立製作所 | エレベータ制御装置 |
| WO2007009269A1 (de) * | 2005-07-19 | 2007-01-25 | Bucher Hydraulics Ag | Maschinenraumloser hydraulischer aufzug |
| WO2007013141A1 (ja) * | 2005-07-26 | 2007-02-01 | Mitsubishi Denki Kabushiki Kaisha | エレベーターの制御装置 |
| US20070029052A1 (en) * | 2005-08-03 | 2007-02-08 | Nien Made Enterprise Co., Ltd. | Equilibrium device for a blind without pull cords |
| EP1834917B1 (de) * | 2006-03-16 | 2015-05-20 | ThyssenKrupp Aufzugswerke GmbH | Aufzugantrieb mit einem Elektromotor |
| EP1997763B1 (en) | 2006-03-17 | 2015-10-28 | Mitsubishi Electric Corporation | Elevator device |
| CN101128379B (zh) * | 2006-03-17 | 2011-09-14 | 三菱电机株式会社 | 电梯装置 |
| KR100994582B1 (ko) * | 2006-05-16 | 2010-11-15 | 미쓰비시덴키 가부시키가이샤 | 엘리베이터의 제어 장치 |
| FR2904594B1 (fr) * | 2006-08-04 | 2008-10-17 | Pomagalski Sa | Procede de commande d'une unite de freinage d'une installation de transport par cable et unite de freinage. |
| JP5133352B2 (ja) * | 2006-12-22 | 2013-01-30 | オーチス エレベータ カンパニー | 単一の昇降路に複数のかごを含むエレベータ装置 |
| FI119508B (fi) * | 2007-04-03 | 2008-12-15 | Kone Corp | Vikaturvallinen tehonohjauslaitteisto |
| ES2343608B1 (es) | 2007-08-03 | 2011-06-16 | Orona, S.Coop | Procedimiento y dispositivo de actuacion en situacion de emergencia en aparatos elevadores. |
| CN101888961B (zh) * | 2007-12-05 | 2014-04-02 | 奥蒂斯电梯公司 | 用于在单升降通道内控制多个升降机车厢运动的装置 |
| CN103466402B (zh) * | 2008-09-01 | 2015-10-07 | 三菱电机株式会社 | 电梯装置 |
| US20110240412A1 (en) * | 2008-12-17 | 2011-10-06 | Schienda Greg A | Elevator braking control |
| EP2408702B1 (en) * | 2009-03-16 | 2018-09-19 | Otis Elevator Company | Over-acceleration and over-speed detection and processing system |
| JP5600399B2 (ja) * | 2009-05-19 | 2014-10-01 | 株式会社日立製作所 | エレベーター装置 |
| JP5241623B2 (ja) * | 2009-06-11 | 2013-07-17 | 株式会社日立製作所 | 安全装置付きエレベーター |
| US8191689B2 (en) * | 2009-06-19 | 2012-06-05 | Tower Elevator Systems, Inc. | Elevator safety rescue system |
| US9169104B2 (en) | 2010-12-17 | 2015-10-27 | Inventio Ag | Activating a safety gear |
| WO2012080102A1 (de) | 2010-12-17 | 2012-06-21 | Inventio Ag | Einrichtung für die betätigung und die rückstellung einer fangvorrichtung |
| ES2703362T3 (es) | 2010-12-17 | 2019-03-08 | Inventio Ag | Instalación de ascensor con cabina y contrapeso |
| EP2607282A1 (de) | 2011-12-23 | 2013-06-26 | Inventio AG | Sicherheitseinrichtung für einen Aufzug mit mehreren Kabinen |
| FR2984864A1 (fr) * | 2011-12-27 | 2013-06-28 | Arnoult Serge | Controle du mouvement d'une cabine d'ascenseur |
| SI2807103T1 (sl) | 2012-01-25 | 2016-04-29 | Inventio Ag | Postopek in krmilna priprava za nadzor premikov kabine dvigala |
| JP5932577B2 (ja) * | 2012-09-06 | 2016-06-08 | 株式会社日立製作所 | エレベータの安全システム |
| FI124545B (fi) | 2013-09-26 | 2014-10-15 | Kone Corp | Menetelmä hissikomponentin liikkeen valvomiseksi sekä hissin turvajärjestely |
| WO2016038681A1 (ja) * | 2014-09-09 | 2016-03-17 | 三菱電機株式会社 | エレベーター装置 |
| EP3366626B1 (en) * | 2017-02-22 | 2021-01-06 | Otis Elevator Company | Elevator safety system and method of monitoring an elevator system |
| EP3608274A1 (en) * | 2018-08-10 | 2020-02-12 | Otis Elevator Company | Enhancing the transport capacity of an elevator system |
| EP3744672A1 (de) * | 2019-05-31 | 2020-12-02 | Cedes AG | Grenzkurvensteuerung für aufzüge |
| US20220033215A1 (en) | 2020-08-01 | 2022-02-03 | Otis Elevator Company | Elevator motion control after electrical protective device activation |
| KR102382611B1 (ko) * | 2021-10-26 | 2022-04-08 | (주) 청원기연 | 카리프트 안전운전 시스템 |
| DE102022111457A1 (de) | 2022-05-09 | 2023-11-09 | Tk Elevator Innovation And Operations Gmbh | Verfahren zum Betreiben einer Aufzugsanlage |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4378059A (en) * | 1980-04-18 | 1983-03-29 | Hitachi, Ltd. | Abnormal elevator speed detector |
| GB2153465A (en) * | 1984-01-11 | 1985-08-21 | Hitachi Ltd | Emergency stop control apparatus for elevator |
| US4800990A (en) * | 1987-05-07 | 1989-01-31 | Blain Roy W | Three speed valve control for high performance hydraulic elevator |
| US6170614B1 (en) * | 1998-12-29 | 2001-01-09 | Otis Elevator Company | Electronic overspeed governor for elevators |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH502948A (de) * | 1968-12-04 | 1971-02-15 | Aufzuege Ag Schaffhausen | Hydraulische Antriebseinrichtung für einen Seil-Aufzug |
| JPS6239017Y2 (zh) * | 1979-03-17 | 1987-10-05 | ||
| JPS5785779A (en) * | 1980-11-12 | 1982-05-28 | Hitachi Ltd | Preventive circuit for free-run of elevator |
| US4638888A (en) * | 1985-03-18 | 1987-01-27 | Brownie Manufacturing Co., Inc. | Hydraulic elevator |
| JPS62230582A (ja) * | 1986-03-31 | 1987-10-09 | 三菱電機株式会社 | エレベ−タの安全装置 |
| JPH04286587A (ja) * | 1991-03-14 | 1992-10-12 | Mitsubishi Electric Corp | リニアモータ式エレベータ制御装置 |
| JPH0543150A (ja) * | 1991-08-20 | 1993-02-23 | Hitachi Ltd | エレベータ |
| US5226508A (en) * | 1991-12-02 | 1993-07-13 | Otis Elevator Company | Disc brake for elevator drive sheave |
| DK0648703T3 (da) * | 1993-10-18 | 1999-09-13 | Inventio Ag | Sikkerhedsbremse til en elevatorkabine |
| US6371248B1 (en) * | 1998-12-14 | 2002-04-16 | Inventio Ag | Drive unit for elevators |
| CA2419737C (en) * | 2000-08-18 | 2009-01-27 | Bucher Hydraulics Ag | Hydraulic elevator with an accumulator |
| US6557670B2 (en) * | 2001-07-17 | 2003-05-06 | Jiun Jyh Wang | Double brake protection device for elevator |
-
2002
- 2002-06-27 WO PCT/CH2002/000350 patent/WO2003004397A1/de active IP Right Grant
- 2002-06-27 DK DK02732317.9T patent/DK1401757T4/da active
- 2002-06-27 AT AT02732317T patent/ATE348779T1/de active
- 2002-06-27 BR BRPI0210750-3A patent/BR0210750B1/pt not_active IP Right Cessation
- 2002-06-27 DE DE50209017T patent/DE50209017D1/de not_active Expired - Lifetime
- 2002-06-27 PT PT02732317T patent/PT1401757E/pt unknown
- 2002-06-27 JP JP2003510378A patent/JP2005515134A/ja active Pending
- 2002-06-27 ES ES02732317T patent/ES2278027T5/es not_active Expired - Lifetime
- 2002-06-27 EP EP02732317A patent/EP1401757B2/de not_active Expired - Lifetime
- 2002-06-27 CN CNB02813575XA patent/CN1308213C/zh not_active Expired - Lifetime
- 2002-06-27 US US10/481,615 patent/US7117979B2/en not_active Expired - Lifetime
- 2002-06-27 CA CA2448538A patent/CA2448538C/en not_active Expired - Lifetime
-
2004
- 2004-09-28 HK HK04107468A patent/HK1065014A1/xx not_active IP Right Cessation
-
2009
- 2009-06-29 JP JP2009153196A patent/JP2009215082A/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4378059A (en) * | 1980-04-18 | 1983-03-29 | Hitachi, Ltd. | Abnormal elevator speed detector |
| GB2153465A (en) * | 1984-01-11 | 1985-08-21 | Hitachi Ltd | Emergency stop control apparatus for elevator |
| US4800990A (en) * | 1987-05-07 | 1989-01-31 | Blain Roy W | Three speed valve control for high performance hydraulic elevator |
| US6170614B1 (en) * | 1998-12-29 | 2001-01-09 | Otis Elevator Company | Electronic overspeed governor for elevators |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107673148A (zh) * | 2016-08-02 | 2018-02-09 | 通力股份公司 | 调节调平速度极限的方法、电梯控制单元和电梯系统 |
| CN107673148B (zh) * | 2016-08-02 | 2023-02-21 | 通力股份公司 | 调节调平速度极限的方法、电梯控制单元和电梯系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7117979B2 (en) | 2006-10-10 |
| EP1401757A1 (de) | 2004-03-31 |
| PT1401757E (pt) | 2007-02-28 |
| DE50209017D1 (de) | 2007-02-01 |
| ES2278027T3 (es) | 2007-08-01 |
| EP1401757B1 (de) | 2006-12-20 |
| US20040173413A1 (en) | 2004-09-09 |
| ES2278027T5 (es) | 2011-12-05 |
| ATE348779T1 (de) | 2007-01-15 |
| CA2448538A1 (en) | 2003-01-16 |
| BR0210750A (pt) | 2004-07-20 |
| DK1401757T4 (da) | 2011-10-24 |
| BR0210750B1 (pt) | 2012-12-11 |
| JP2009215082A (ja) | 2009-09-24 |
| CA2448538C (en) | 2010-06-01 |
| DK1401757T3 (da) | 2007-04-10 |
| EP1401757B2 (de) | 2011-07-13 |
| HK1065014A1 (en) | 2005-02-08 |
| CN1524057A (zh) | 2004-08-25 |
| JP2005515134A (ja) | 2005-05-26 |
| WO2003004397A1 (de) | 2003-01-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1308213C (zh) | 用于防止电梯轿厢出现不允许的高的运行速度的方法 | |
| EP2583928B1 (en) | Elevator system | |
| RU2369554C2 (ru) | Контроль состояния лифта | |
| CN102348626B (zh) | 电梯过加速和过速保护系统 | |
| FI119878B (fi) | Järjestelmä ja menetelmä hissin turvallisuuden parantamiseksi | |
| CN104080722B (zh) | 用于减小升降机轿厢的速度的系统和方法 | |
| CN1642841A (zh) | 电梯的竖井监视系统 | |
| CN107148392B (zh) | 具有非中心的电子安全系统的电梯 | |
| CN104860148B (zh) | 电梯系统 | |
| CN1753825A (zh) | 电梯安全装置及其动作测试方法 | |
| CN1854049A (zh) | 对电梯轿厢速度进行监视的方法和监视系统 | |
| CN101090854A (zh) | 电梯装置 | |
| CN1524058A (zh) | 具有在竖井底部和/或在竖井顶部的虚构的保护区的电梯设备和用于驱动电梯设备的方法 | |
| CN103754726A (zh) | 一种防止电梯轿厢意外移动的装置及其方法 | |
| CN201016077Y (zh) | 光电旋转编码器式电梯限速器 | |
| JP2006298538A (ja) | エレベータ装置 | |
| CN1720189A (zh) | 电梯用调速器 | |
| CN101056813A (zh) | 电梯装置 | |
| CN102452596B (zh) | 电子安全电梯 | |
| CN1910104A (zh) | 电梯装置 | |
| CN202542667U (zh) | 一种自动扶梯或自动人行道安全保护装置 | |
| US20210371240A1 (en) | Emergency terminal stopping systems | |
| CN110980460B (zh) | 一种利用多功能电梯制动控制装置的电梯制动控制方法 | |
| CN205916866U (zh) | 防止电梯轿厢意外移动系统 | |
| CN115285819A (zh) | 一种电梯安全装置的保护系统及电梯 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term |
Granted publication date: 20070404 |
|
| CX01 | Expiry of patent term |