CN1265535C - 永久磁铁型同步线性马达 - Google Patents
永久磁铁型同步线性马达 Download PDFInfo
- Publication number
- CN1265535C CN1265535C CNB018081754A CN01808175A CN1265535C CN 1265535 C CN1265535 C CN 1265535C CN B018081754 A CNB018081754 A CN B018081754A CN 01808175 A CN01808175 A CN 01808175A CN 1265535 C CN1265535 C CN 1265535C
- Authority
- CN
- China
- Prior art keywords
- permanent magnet
- armature
- tooth
- length
- linear motor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images
Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K41/00—Propulsion systems in which a rigid body is moved along a path due to dynamo-electric interaction between the body and a magnetic field travelling along the path
- H02K41/02—Linear motors; Sectional motors
- H02K41/03—Synchronous motors; Motors moving step by step; Reluctance motors
- H02K41/031—Synchronous motors; Motors moving step by step; Reluctance motors of the permanent magnet type
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Linear Motors (AREA)
- Iron Core Of Rotating Electric Machines (AREA)
Abstract
本发明提供一种永久磁铁型同步线性马达,其具备有将构成场磁极的极性形成交替变化的多个永久磁铁(2)排列配置成直线状的磁轭(1),及藉磁隙与永久磁铁(2)的磁铁列成对向的电枢(3),电极(3)是由具有主齿(4b)和槽(4a)的电枢心(4),和缠绕线圈于电枢心(4)的槽(4a)的电枢线圈(5),及配置于电枢心(4)两端的辅助齿(6)所构成,而辅助齿(6)的中心间距离τP和场磁极的节距τm的关系是τP=(2n-1)×τm/2(n为正的整数)。其中,倘若与辅助齿6的永久磁铁列成正交(垂直相交)方向的长度为Hd,与主齿(4b)的永久磁铁列成正交方向的长度为Ht时,设定辅助齿(6)的长度为0<Hd<Ht的范围。由此,可提供齿槽效应推力小而性能高的永久磁铁型同步线性马达。
Description
技术领域
本发明涉及齿槽效应推力小而性能高的永久磁铁型同步线性马达。
背景技术
传统上(以往)被利用于工作机械的输送机构或半导体制造装置的定位装置等之同时,具有构成场磁极用的永久磁铁,及通过间隙与永久磁场的磁极面成对向,并将电枢线圈缠绕于电枢心的槽内所形成的电枢的永久磁铁型同步线性马达(电动机)已被众所周知。
当未对如此构成的线性马达的电枢线圈通电的状态下,通过与永久磁铁的电磁作用来使电枢朝永久磁铁的磁铁列的长轴方向移动时,会由电枢心两端部的端效果而产生齿槽效应(cogging)推力。而为了减低该齿槽效应推力,提出有如下的在电枢心两端具备辅助齿的现有技术的方案。
图5是显示习知技术的永久磁铁型同步线性马达的侧剖视图,是8个磁极、9个槽的间隙对向形之例者(例如日本专利实公平7-053427号公报)。
在图5中,1为平板状的磁轭,2为安装在磁轭1上的多个的极性成交替变化的永久磁铁,10为通过间隙与永久磁铁2的磁极面相对向的电枢,11为电枢心,是将电磁铁板冲制成梳齿状,并重叠固定具有形成槽11a的主齿11b及连结主齿11b的轭部11c的电枢铁板者。13为设于电枢心11两端的辅助齿,主齿11b的长度Ht和辅助齿13的长度Hd成为同一长度。该线性马达将配设于磁轭1的永久磁铁2作为定子,电枢10作为可动子(转子),以使电枢10朝磁轭1的长轴方向移动。
在该结构的线性马达中,假设配设于电枢两端的辅助齿的中心间的距离作为τPO,场磁极节距作为τm时,辅助齿中心间的距离τPO成为场磁极节距的奇数倍,也即具有τPO=(2n-1)×τm/2的关系。再者,图5是显示n=9为例。
另外,作为第2的习知技术,可举出揭示于日本专利特公昭60-30195号公报的线性马达。
该线性马达是使配设于电枢两端的辅助齿中心间的距离τPO成为场磁极间距τm的奇数倍,则形成τPO=(2n-1)×τm/2的关系。
然而,在习知技术中,为了消除电枢心端部的端效果的对策,虽如上述规定有辅助齿中心间的距离,但因应于线性马达的用途而试图高性能化时,反而会使设计上的自由度变小,以致无法使齿槽效应推力变小,而存在在意图使线性马达高性能化时产生妨碍的问题。
又习知技术所规定的辅助齿的中心间距离是考虑对于1个磁极节距会产生1个周期分量的变化的一次成分来求出者。因此,对于一次成分虽有大的减低效果,但在齿槽效应波形含有二次成分或高次成分时,对于高次成分的减低效果极小,使得具有无法使齿槽效应变小的场合。
另外,通过电枢的齿间的槽形状等的影响而减低齿槽效应效果会成为最大的辅助齿间节距,也有可能从以上述习知技术所规定的节距错开的情况产生。
发明内容
本发明是为了解决上述课题而发明者,其目的在于提供一种齿槽效应推力小而具有高性能的永久磁铁型同步线性马达。
为了解决上述问题,本发明1提供一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;而所述辅助齿的中心间距离τP和所述场磁极的节距τm的关系为τP=(2n-1)×τm/2,其中n为正的整数;使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交的方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd<Ht的范围内。
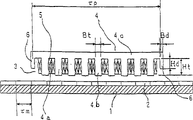
发明2的发明是在发明1的永久磁铁型同步线性马达中,将所述辅助齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bd形成较所述主齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bt为窄。
发明3发明是在发明1或2的永久磁铁型同步线性马达中,所述辅助齿的长度Hd和所述主齿的长度Ht的比Hd/Ht为0.5≤Hd/Ht<1。
发明4的发明是在发明1至3的任一项的永久磁铁型同步线性马达中,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
根据发明5,提供一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;而所述辅助齿的中心间距离τP和所述场磁极的节距τm的关系为τP≠(2n-1)×τm/2,其中n为正的整数;使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交的方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd≤Ht的范围内。
发明6的发明是在发明5的永久磁铁型同步线性马达中,设定所述辅助齿的长度Hd和所述主齿的长度Ht的比Hd/Ht为0.5≤Hd/Ht≤1。
发明7的发明是在发明5或6的永久磁铁型同步线性马达中,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
根据发明8,提供一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:场磁极的节距τm和辅助齿的中心间距离τP的关系为:(2n-1)τm/8≤τP≤(2n-1)τm/2,其中n为正的整数;将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd≤Ht的范围内。
发明9的发明是在发明8的永久磁铁型同步线性马达中,将所述辅助齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bd形成较所述主齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bt为窄。
发明10的发明是在发明8或9的永久磁铁型同步线性马达中,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
附图说明
图1是显示本发明的实施例的永久磁铁型同步线性马达,在说明实施例1~3的主齿和辅助齿的关系上,有共同的线性马达的侧剖视图;
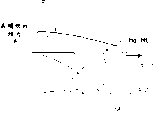
图2显示将辅助齿的中心间距离τP和辅助齿长度作为参数,而以数值分析来计算齿槽效应推力的分析结果;
图3是以模式性地显示对于电枢的辅助齿和主齿的长度比的与齿槽效应推力的关系图;
图4是显示本发明的实施例的永久磁铁型同步线性马达,具有分割磁心的线性马达的侧剖视图;
图5是显示第1习知技术的永久磁铁型同步线性马达的侧剖视图。
具体实施方式
以下,依据附图来说明本发明的实施形态。
实施例1
图1是显示本发明实施例的永久磁铁型同步线性马达,为了说明实施例1-3的主齿和辅助的关系,而为共同的线性马达侧剖视图。
本发明与习知为同一构成元件者,将标以同一标号而省略其说明,仅对于相异处加以说明。再者,本线性马达是显示与习知技术同样的8个磁极,9个槽的间隙成对向的例子。
图1中,3为电枢、4为电枢心、4a为槽、4b为主齿、4c为轭部、5为电枢线圈、6为辅助齿。
在本实施例中,线性马达包括:由要成为场磁极的永久磁铁2所构成的定子,及具有槽4a及主齿4b且具备辅助齿6于缠绕电枢线圈5于电枢心4两端的电枢3所构成的可动子者,在基本上与习知技术为同样结构者。
其次,于本实施例中,将辅助齿6的中心间距离作为τP,于图4的习知技术所示的辅助齿6的中心间距离作为τPO时,以辅助齿6的中心间距离τP和辅助齿6的长度Hd作为参数,且由使用有限单元法的数值分析来计算齿槽效应推力。再者,将辅助齿6与永久磁铁2的磁铁列成正交方向的长度作为Hd,主齿4b与永久磁铁2的磁铁列成正交方向的长度作为Ht者。
图2是显示辅助齿6的中心间距离τP和辅助齿6的长度Hd作为参数,而由数值解析来计算齿槽效应推力的分析结果。
纵轴为齿槽效应推力,横轴是图1所示的辅助齿6的中心间距离τP和图4所示的辅助齿6的中心间距离τPO的比τP/τPO,及辅助齿6的长度H和主齿4b的长度Ht的比Hd/Ht者。以连结各计算点成格子状、而表示齿槽效应推力值为相等的等高线。于图2中,考虑到齿槽效应推力方向而附加正负的符号于齿槽效应推力来表示。图2中,A表示齿槽效应推力为零的等高线。
于图2的实例中,将在τP/τPO约为0.98以上的范围,以适切地设定辅助齿6的长度Hd,就具有齿槽效应推力大致成为零的点,使得在设计上,较习知技术可增进设计的自由度。
于本实施例中,虽在τP/τPO,约为0.98以上时,具有齿槽效应推力大致成为零的点,但会由磁极的节距或电枢的齿的宽度、形状而变化。惟如图2的变化,可由数值分析或实验而获取。
又在本实施例中,于日本专利实公开7-053427号公报所示的辅助齿6的长度和主齿4b的长度为相等,而在辅助齿6的中心间距离τPO的条件下,产生有若干的齿槽效应推力。其乃由于主齿4b的前端形状而产生的影响,显示着最适宜点乃会比在日本专利实公平7-053427号公报所规定的节距偏移(错开)的场合。
甚至如此的状况下,在本发明,能在辅助齿6的中心间距离τP和场磁极的节距τm的关系,以形成τP=(2n-1)×τm/2(n为正的整数)的条件下,适切地设定辅助齿6的长度Hd于0<Hd<Ht的范围,就可减低齿槽效应推力至大致零的数值。
其次,说明有关辅助齿6的作用。线性马达的齿槽效应推力F,倘若作用于主齿的推力作为F1,作用于辅助齿6的推力作为F2时,就能以下面的公式表示。
F=F1+F2 ……(1)
图3是对于电枢的辅助齿6和主齿4b的长度比例的齿槽效应推力的关系,以模式显示的图。
横轴是电枢的辅助齿6的长度和主齿4b的长度的比例,纵轴为齿槽效应推力。而与图2同样,于图3考虑到齿槽效应推力的朝向,以附加正负符号于齿槽效应推力来表示。
由图3可知,作用于辅助齿6的齿槽效应推力F2及作用于电板3的推力F1,乃由辅助齿6的长度而变化。因而,以适切地设定辅助齿6的长度,就可抵消作用于主齿4b的推力而使整体的齿槽效应推力F(=F1+F2)形成为零。
有关齿槽效应推力会成为零的辅助齿6的最适当值会由辅助齿6的中心间距离、场磁极节距、电枢心4的长度、辅助齿6的宽度等而有不同。而该适当值可由图3的分析结果而了解,予以设定辅助齿的长度Hd和主齿长度Ht的比Hd/Ht为0.5≤Hd/Ht≤1时,可减低齿槽效应推力大致成为零之处。又在上述条件之下,倘若辅助齿6的沿着永久磁铁2的磁铁列长度方向的宽度做为Bd,主齿4b的沿着永久磁铁2的磁铁列长度方向的宽度作为Bt时,若使Bd较Bt形成狭窄,就可具有更进一步地对于减低齿槽效应推力有效果乃被证实。
因此,本线性马达,乃在辅助齿6的中心间距离τP和场磁极的节距τm的关系作成τP=(2n-1)×τm/2(n为正的整数)的关系下,使辅助齿6的长度Hd和主齿4b的长度Ht的关系予以适当地设定于0<Hd<Ht的范围,使得可令齿槽效应推力形成大致为零,而可提供齿槽效应推力小而高性能的永久磁铁型同步线性马达。
再者,在于上述的数值分析,察明除了上述条件的外,具有如下的减低齿槽效应推力的效果。
实施例2
接着,使用图1来说明有关实施例2。
亦即,将在辅助齿6的中心间距离τP和场磁极的节距τm的关系做成τP≠(2n-1)×τm/2(n为正的整数)的条件下,假定辅助齿6的沿着永久磁铁2的磁铁列成正交方向的长度为Hd,主齿4b沿着永久磁铁2的磁铁列成正交方向的长度为Ht时,予以设定辅助齿6的长度于0≤Hd≤Ht的范围之处。
又在上述结构下,设定辅助齿6的长度Hd和主齿4b的长度Ht的比Hd/Ht成0.50≤Hd/Ht≤1者。
实施例2,当主齿4b的长度Ht和辅助齿6的长度Hd的关系设定成如上述时,就如实施例1,能使齿槽效应推力减低成大致为零,而可提供高性能的永久磁铁型同齿线性马达。
实施例3
接着,使用图1来说明有关实施例3。
如在习知技术所说明,线性马达的齿槽效应波形乃对于磁极节距含有除了一次成分外的二次成分以上的高次成分。而次数愈小振幅会愈大。为此,对于减低齿槽效应,主要有需要减低一次成分和二次成分。
接着,说明有关由辅助齿6来减低一次成分或二次成分的减低效果。首先,将说明辅助齿6的中心间距离和齿槽效应的关系。
若要减低一次成分,以如日本专利实公开7-053427号所示,令辅助齿6的中心间距离做成τP=(2n-1)×τm/2即可。
而要抵消二次成分的辅助齿6的中心间距离是形成如下。
倘若作用于左右的辅助齿6的力做为FL、FR时,可各别地表示成如下。
FL=Fosin[(2x/τm)2π]
FR=Fosin[(2x/τm)2π+(2τP/τm)2π]
其中,Fo为二次成分的振幅,x为电枢心4的位置。
由于令FL和FR的合力成为零就可。亦即,Fs=Fosin[(2x/τm)2π]+Fosin[(2x/τm)2π+(2τP/τm)2π]=0,换言之,满足(2τP/τm)2π=(2n-1)π/2就可,因此,形成τP=(2n-1)τm/8。
以如上述,虽然使一次成分和二次成分成为最小化的辅助齿6的中心间距离有相异,也可调整辅助齿6的长度来使一次成分和二次成分同时成为最小化。
该情况乃由于辅助齿6的长度对于一次成分的影响极大,因而,甚至任意的辅助齿6的中心间距离,也可由适切地设定辅助齿6的长度而减低一次成分。而该时,也可由辅助齿6的长度而使二次成分的大小产生变化。便以使用有限单元法来分析的结果,确认在于(2n-1)τm/8≤τP(2n-1)τm/2的范围内,也存在可同时令二次成分成为最小的位置。
亦即,要使一次成分和二次成分同时变为小,只要设定辅助齿6的中心间距离成(2n-1)τm/8≤τP(2n-1)τm/2就可。由此,最适合的辅助齿6的中心间距离,可由有限单元法等的数值分极或实验来求出。
实施例3,由于令场磁极节距τm和辅助齿的中心间距离τP的关系设定成如上述时,可同时令齿槽效应波形的一次成分和二次成分变为小,因而,实施例1、2同样,可减低齿槽效应推力大致成为零,并可提供高性能的永久磁铁型同步线性马达。
实施例4
下面说明有关实施例4。
实施例1~3,虽然说明电极心成一体型式的例,但也可替代一体型式的电枢心而构成为多个的分割磁心的结构。图4是显示具备分割磁心的永久磁铁型同步线性马达的侧剖视图。
具体地说明时,该线性马达的电枢3是分电枢心4成复数的磁心块(部件),并构成在构成所分割的磁心块的轭部4c一方侧面,予以配设凸状的卡合部4d,又在另一方侧面配设凹状的卡合部4e,并连续地缠绕电枢线圈5于磁心块的槽4a来收容,而嵌合相邻的各卡合部4d、4e来结合,最后,令所结合的磁心场予以固定于移动子7的下面者。
实施例4,因可因应于线性马达的规格来增减电枢长度自如,因而,将实施例4与实施例1~3的构成特征予以组合时,当对于线性马达的长行程有所要求时,可增进设计的自由度且可减低齿槽效应推力。
再者,依据本发明的辅助齿的中心间距离τP,和习知技术所示的辅助齿的中心间距离τPO的关系,予以做成τP=τPO×0.99就可。
又在本实施例中齿虽形成开口槽,但亦可形成例如图4所示形成齿为半开口槽状,适切地设定辅助齿时,可减低齿槽效应推力。
又本线性马达,虽使用间隔对向型之例来说明,但也能以藉磁隙来配设成2列的场磁极于电枢两侧的磁通贯穿型来替代。
又辅助齿的材质亦可采用与电枢部相异者,可适当地予以选择。
又本发明由于设定配于设电枢心两端的辅助齿成适当,最适合的形状,因而,具有可抑制电枢线圈间的阻抗不平衡(失衡)。
如上所述,有关本发明的永久磁铁型同步线性马达,乃作为FA机器的搬运系统,例如工具机的供料台或半导体制造装置的步进器驱动机构等者,极为有用。
Claims (10)
1.一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;
所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;
而所述辅助齿的中心间距离τP和所述场磁极的节距τm的关系为τP=(2n-1)×τm/2,其中n为正的整数;
使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:
将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交的方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd<Ht的范围内。
2.根据权利要求1所述的永久磁铁型同步线性马达,其特征在于,将所述辅助齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bd形成较所述主齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bt为窄。
3.如权利要求1或2所述的永久磁铁型同步线性马达,其特征在于所述辅助齿的长度Hd和所述主齿的长度Ht的比Hd/Ht为0.5≤Hd/Ht<1。
4.如权利要求1所述的永久磁铁型同步线性马达,其特征在于,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
5.一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;
所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;
而所述辅助齿的中心间距离τP和所述场磁极的节距τm的关系为τP≠(2n-1)×τm/2,其中n为正的整数;
使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:
将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交的方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd≤Ht的范围内。
6.如权利要求5所述的永久磁铁型同步线性马达,其特征在于,设定所述辅助齿的长度Hd和所述主齿的长度Ht的比Hd/Ht为0.5≤Hd/Ht≤1。
7.如权利要求5或6所述的永久磁铁型同步线性马达,其特征在于,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
8.一种永久磁铁型同步线性马达,包括:将构成场磁极的极性成交替地变化的多个永久磁铁排列配置成直线状的磁轭,及通过磁隙与所述永久磁铁的磁铁列配置成对向的电枢;
所述电枢是由具有主齿和槽的电枢心,和将线圈缠绕于所述电枢心的槽中的电枢线圈,及配置于所述电枢心两端的辅助齿所构成;
使所述场磁极和所述电枢的任一方作为定子,另一方作为可动子,以使所述场磁极和所述电枢形成相对地移动,其特征在于:
场磁极的节距τm和辅助齿的中心间距离τP的关系为:(2n-1)τm/8≤τP≤(2n-1)τm/2,其中n为正的整数;
将所述辅助齿与所述永久磁铁的磁铁列成正交或垂直相交的方向的长度作为Hd,所述主齿与永久磁铁的磁铁列成正交方向的长度作为Ht时,将所述辅助齿的长度设定在0<Hd≤Ht的范围内。
9.根据权利要求8所述的永久磁铁型同步线性马达,其特征在于,将所述辅助齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bd形成较所述主齿的沿着所述永久磁铁的磁铁列长轴方向的宽度Bt为窄。
10.如权利要求8或9所述的永久磁铁型同步线性马达,其特征在于,所述电枢心是由多个分割磁心所构成,并在构成所述分割磁心的轭部一方侧面配设凸状的卡合部,另一方侧面配设凹状的卡合部,而嵌合相邻的各卡合部来结合。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP118022/2000 | 2000-04-19 | ||
| JP118022/00 | 2000-04-19 | ||
| JP2000118022 | 2000-04-19 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1430805A CN1430805A (zh) | 2003-07-16 |
| CN1265535C true CN1265535C (zh) | 2006-07-19 |
Family
ID=18629237
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB018081754A Expired - Lifetime CN1265535C (zh) | 2000-04-19 | 2001-02-16 | 永久磁铁型同步线性马达 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6831379B2 (zh) |
| EP (1) | EP1283586B1 (zh) |
| JP (1) | JP4103066B2 (zh) |
| KR (1) | KR100720753B1 (zh) |
| CN (1) | CN1265535C (zh) |
| TW (1) | TW506182B (zh) |
| WO (1) | WO2001080408A1 (zh) |
Families Citing this family (59)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6587781B2 (en) * | 2000-08-28 | 2003-07-01 | Estimotion, Inc. | Method and system for modeling and processing vehicular traffic data and information and applying thereof |
| US7362012B2 (en) * | 2001-04-09 | 2008-04-22 | Bei Sensors And Systems Company, Inc. | Ironcore linear brushless DC motor with reduced detent force |
| DE10133654A1 (de) * | 2001-07-11 | 2003-02-06 | Siemens Ag | Synchronmaschine |
| WO2003029651A2 (en) * | 2001-10-01 | 2003-04-10 | Magnemotion, Inc. | Synchronous machine design and manufacturing |
| JP3870413B2 (ja) * | 2002-08-20 | 2007-01-17 | 株式会社安川電機 | コアレスリニアモータ |
| JP2004187488A (ja) * | 2002-11-19 | 2004-07-02 | Fanuc Ltd | 電動機 |
| JP4102708B2 (ja) * | 2003-05-27 | 2008-06-18 | オークマ株式会社 | 永久磁石を利用したモータ |
| JP4089597B2 (ja) * | 2003-11-18 | 2008-05-28 | 株式会社日立製作所 | リニアモータ及びxyステージ |
| CN101356714B (zh) | 2004-05-07 | 2015-07-08 | 麦克纳莫绅有限公司 | 传送工具、传送方法、和传送系统 |
| JP4574224B2 (ja) * | 2004-05-12 | 2010-11-04 | 山洋電気株式会社 | リニアモータ |
| JP2006034017A (ja) * | 2004-07-16 | 2006-02-02 | Shin Etsu Chem Co Ltd | 工作機械用リニアモータ |
| EP1617545A3 (en) * | 2004-07-16 | 2006-12-27 | Shin-Etsu Chemical Co., Ltd. | Linear motor for use in machine tool |
| DE102005004380B4 (de) * | 2005-01-31 | 2012-02-02 | Siemens Ag | Linearmotor mit Kraftwelligkeitsausgleich |
| CN101283501B (zh) * | 2005-08-31 | 2010-08-11 | Thk株式会社 | 微型促动器 |
| JP2008005665A (ja) * | 2006-06-26 | 2008-01-10 | Hitachi Ltd | 円筒リニアモータ及びそれを用いた車両 |
| DE102006035671A1 (de) * | 2006-07-31 | 2008-02-07 | Siemens Ag | Linearmotor mit dreidimensionaler Zahnstruktur |
| DE102006035678A1 (de) * | 2006-07-31 | 2008-02-14 | Siemens Ag | Linearmotor mit Kraftwelligkeitsausgleich |
| DE102006035675A1 (de) * | 2006-07-31 | 2008-02-14 | Siemens Ag | Linearmotor mit Kraftwelligkeitsausgleich |
| DE102006035674A1 (de) * | 2006-07-31 | 2008-02-07 | Siemens Ag | Linearmotor mit Kraftwelligkeitsausgleich |
| EP1921735A3 (de) * | 2006-11-09 | 2015-03-18 | Alois Jenny | Eisenbehafteter Linearmotor mit kleiner Rastkraft bei hoher Leistungsdichte |
| KR101421314B1 (ko) * | 2007-04-24 | 2014-07-18 | 가부시키가이샤 야스카와덴키 | 리니어 모터 전기자 및 리니어 모터 |
| KR100892217B1 (ko) * | 2007-06-11 | 2009-04-07 | 삼익티에이치케이 주식회사 | 리니어모터 |
| US8030804B2 (en) | 2007-09-14 | 2011-10-04 | Thk Co., Ltd. | Linear motor and linear motor cogging reduction method |
| EP2091138A1 (de) * | 2008-02-18 | 2009-08-19 | Siemens Aktiengesellschaft | Primärteil und lineare elektrische Maschine mit Kraftwelligkeitsausgleich |
| EP2091137B1 (de) * | 2008-02-18 | 2014-06-25 | Siemens Aktiengesellschaft | Primärteil und lineare elektrische Maschine mit Kraftwelligkeitsausgleich |
| ATE544228T1 (de) * | 2008-10-31 | 2012-02-15 | Bosch Gmbh Robert | Verfahren und vorrichtung zur steuerung eines linearen bewegungssystems |
| US8616134B2 (en) | 2009-01-23 | 2013-12-31 | Magnemotion, Inc. | Transport system powered by short block linear synchronous motors |
| US9032880B2 (en) | 2009-01-23 | 2015-05-19 | Magnemotion, Inc. | Transport system powered by short block linear synchronous motors and switching mechanism |
| WO2011042975A1 (ja) * | 2009-10-08 | 2011-04-14 | 三菱電機株式会社 | ファンモーター及びこれを備えた空気調和機 |
| JP5041017B2 (ja) | 2010-03-11 | 2012-10-03 | 株式会社安川電機 | リニアモータ |
| JP5015290B2 (ja) * | 2010-06-16 | 2012-08-29 | Thk株式会社 | リニアモータ |
| DE112010005722T5 (de) * | 2010-07-06 | 2013-05-29 | Mitsubishi Electric Corporation | Läufer eines Linearmotors und Linearmotor |
| CN102185444B (zh) * | 2011-05-18 | 2012-12-05 | 哈尔滨工业大学 | 双电枢结构高动态直线永磁同步电机 |
| US20130033125A1 (en) * | 2011-08-03 | 2013-02-07 | Kabushiki Kaisha Yaskawa Denki | Linear motor armature and linear motor |
| JP5418558B2 (ja) * | 2011-08-23 | 2014-02-19 | 株式会社安川電機 | リニアモータの固定子およびリニアモータ |
| CN102290961B (zh) * | 2011-08-25 | 2013-02-13 | 哈尔滨工业大学 | 磁通反向平面电机 |
| CN102403872B (zh) * | 2011-11-04 | 2013-05-08 | 哈尔滨工业大学 | 定位力补偿型直线永磁同步电机 |
| CN102931803B (zh) * | 2012-10-10 | 2015-01-14 | 中国科学院宁波材料技术与工程研究所 | 一种抑制磁阻力的永磁同步直线电机 |
| KR101420254B1 (ko) * | 2012-11-07 | 2014-07-18 | 한국전기연구원 | 냉각 구조를 구비한 모듈형 전기기기 |
| CN103023268B (zh) * | 2013-01-16 | 2015-07-01 | 西安泰富西玛电机有限公司 | 强迫风冷三边工作三相直线异步电动机 |
| JP6633516B2 (ja) | 2013-09-21 | 2020-01-22 | マグネモーション インコーポレイテッド | パッケージングおよび他の用途のためのリニアモータ輸送 |
| WO2016005568A1 (en) | 2014-07-11 | 2016-01-14 | Asml Netherlands B.V. | Actuator, positioning device, lithographic apparatus, and method for manufacturing an actuator |
| CN104767350B (zh) * | 2015-04-29 | 2018-11-02 | 哈尔滨工业大学 | 基于单双层混合绕组的模块化圆筒型多相永磁直线电机 |
| KR102120569B1 (ko) * | 2015-07-20 | 2020-06-09 | 모트엑스 엘티디. | 횡자속 리니어모터 |
| CN105119463A (zh) * | 2015-07-22 | 2015-12-02 | 北京顿一科技有限公司 | 新型有铁芯直线电机、电机伺服系统及铁芯的制备方法 |
| TWI552487B (zh) * | 2015-08-03 | 2016-10-01 | 直得科技股份有限公司 | 鐵心式線性馬達構造 |
| EP3402059B1 (en) | 2015-11-27 | 2021-11-03 | Kabushiki Kaisha Yaskawa Denki | Linear motor |
| CN105811738B (zh) * | 2016-04-15 | 2018-02-02 | 东南大学 | 一种直驱式波浪发电用全超导初级励磁直线发电机 |
| RU2658301C2 (ru) * | 2016-09-06 | 2018-06-20 | Олег Анатольевич Рокачевский | Синхронный линейный электродвигатель |
| RU2658296C2 (ru) * | 2016-09-13 | 2018-06-20 | Олег Анатольевич Рокачевский | Линейный электродвигатель |
| CN107147222A (zh) * | 2017-05-26 | 2017-09-08 | 东莞市川恩智能装备有限公司 | 一种分体式直线电机铁芯 |
| TWI638503B (zh) * | 2017-09-05 | 2018-10-11 | 大銀微系統股份有限公司 | 線性馬達之鐵芯組 |
| CN107493003B (zh) * | 2017-09-22 | 2020-04-21 | 南京航空航天大学 | 一种单元电机模块化双边错齿60°永磁同步直线电机 |
| CN107493004A (zh) * | 2017-09-22 | 2017-12-19 | 南京航空航天大学 | 一种模块化圆筒型永磁同步直线电机 |
| RU2679002C1 (ru) * | 2018-01-17 | 2019-02-05 | Олег Анатольевич Рокачевский | Синхронный электродвигатель |
| CN108683319B (zh) * | 2018-06-01 | 2020-12-11 | 哈尔滨理工大学 | 低速高推力密度双层分数槽绕组圆筒型直线电机 |
| CN109104065A (zh) * | 2018-09-25 | 2018-12-28 | 珠海格力电器股份有限公司 | 动子组件、直线电机 |
| FR3100473B1 (fr) * | 2019-09-10 | 2021-07-30 | Sidel Participations | Dispositif d'étirage et bloc de bobinage d'un tel dispositif d'étirage |
| WO2024100907A1 (ja) * | 2022-11-10 | 2024-05-16 | Wolongモ-タ-制御技術株式会社 | リニアモータ |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU394892A1 (ru) * | 1970-10-08 | 1973-08-22 | Линейный индуктор индукционной машины | |
| DE3246064A1 (de) * | 1980-06-12 | 1984-06-14 | Papst-Motoren GmbH & Co KG, 7742 St Georgen | Gleichstromlinearmotor |
| JPS61124258A (ja) * | 1984-11-19 | 1986-06-12 | Hitachi Kiden Kogyo Ltd | リニア誘導モ−タ |
| JPS61112582A (ja) * | 1985-05-30 | 1986-05-30 | Fujitsu Ltd | 誘導型停止保持装置 |
| US4912746A (en) * | 1987-08-15 | 1990-03-27 | Shinko Denki Kabushiki Kaisha | Linear DC brushless motor |
| JPH03127259A (ja) | 1989-10-13 | 1991-05-30 | Naomasa Nomura | パソコン・ワープロの文書を音声化 |
| JPH0753427Y2 (ja) * | 1990-09-12 | 1995-12-06 | 株式会社安川電機 | 直線運動電動機 |
| JPH04281359A (ja) * | 1991-03-05 | 1992-10-06 | Fuji Electric Co Ltd | リニア同期機 |
| JP3670026B2 (ja) | 1993-06-10 | 2005-07-13 | 日本曹達株式会社 | ホスト化合物及び包接化合物 |
| US5910691A (en) * | 1995-03-20 | 1999-06-08 | Wavre; Nicolas | Permanent-magnet linear synchronous motor |
| JPH0937540A (ja) * | 1995-07-14 | 1997-02-07 | Shinko Electric Co Ltd | リニア誘導同期電動機 |
| JP3127259B2 (ja) * | 1997-09-08 | 2001-01-22 | 福井県 | リニアモータおよびこれを利用した装置 |
| JP3360606B2 (ja) * | 1998-03-10 | 2002-12-24 | 株式会社安川電機 | リニアモータ |
| JP3495621B2 (ja) * | 1998-12-09 | 2004-02-09 | 株式会社タムラ製作所 | リニアモータ |
| KR100855921B1 (ko) * | 1999-02-04 | 2008-09-02 | 가부시키가이샤 니콘 | 평면모터장치 및 그 구동방법, 스테이지장치 및 그구동방법, 노광장치 및 노광방법, 그리고 디바이스 및 그제조방법 |
| JP2001008432A (ja) * | 1999-06-22 | 2001-01-12 | Sankyo Seiki Mfg Co Ltd | リニアモータ |
-
2001
- 2001-02-16 KR KR1020027013888A patent/KR100720753B1/ko not_active IP Right Cessation
- 2001-02-16 CN CNB018081754A patent/CN1265535C/zh not_active Expired - Lifetime
- 2001-02-16 EP EP01904526.9A patent/EP1283586B1/en not_active Expired - Lifetime
- 2001-02-16 WO PCT/JP2001/001146 patent/WO2001080408A1/ja active Application Filing
- 2001-02-16 JP JP2001549270A patent/JP4103066B2/ja not_active Expired - Lifetime
- 2001-02-19 TW TW090103845A patent/TW506182B/zh not_active IP Right Cessation
- 2001-02-26 US US10/257,936 patent/US6831379B2/en not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1283586A1 (en) | 2003-02-12 |
| US6831379B2 (en) | 2004-12-14 |
| WO2001080408A1 (fr) | 2001-10-25 |
| KR100720753B1 (ko) | 2007-05-22 |
| CN1430805A (zh) | 2003-07-16 |
| EP1283586A4 (en) | 2006-12-27 |
| US20030098620A1 (en) | 2003-05-29 |
| JP4103066B2 (ja) | 2008-06-18 |
| EP1283586B1 (en) | 2013-05-01 |
| KR20030066321A (ko) | 2003-08-09 |
| TW506182B (en) | 2002-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1265535C (zh) | 永久磁铁型同步线性马达 | |
| CN1324785C (zh) | 永磁体埋入型电动机 | |
| CN1132291C (zh) | 永磁铁电动机 | |
| CN1266818C (zh) | 电动机转子 | |
| DE102004044697B4 (de) | Synchronmaschine | |
| CN1078019C (zh) | 采用永磁体的无刷直流电机 | |
| CN1729604A (zh) | 永磁式电动机 | |
| CN1575538A (zh) | 同步机器设计及制造 | |
| CN1606210A (zh) | 具有减小接齿效应和波动转矩的无刷永磁电机及制造方法 | |
| CN1592038A (zh) | 具有转子磁化偏斜的轴向模块的无刷永磁电机及制造方法 | |
| CN1726629A (zh) | 直接起动磁阻电动机的转子 | |
| CN1761130A (zh) | 一种永磁同步电动机 | |
| CN1574546A (zh) | 电机 | |
| CN1679220A (zh) | 用于电机的多相爪磁极结构 | |
| CN1409459A (zh) | 电动机 | |
| CN1108015A (zh) | 直线-旋转复合式步进电动机 | |
| DE102005045503A1 (de) | Elektrische Antriebsmaschine | |
| CN1890862A (zh) | 线性马达以及抵消吸引力型线性马达 | |
| EP2725687A1 (de) | Permanenterregte Synchronmaschine | |
| EP2792051A1 (de) | Transversalflussmaschine mit halbach-arrays | |
| CN1272896C (zh) | 永磁电机 | |
| CN1359187A (zh) | 直线电机 | |
| CN1222782A (zh) | 永磁电动机 | |
| CN1320295A (zh) | 磁力旋转装置 | |
| DE102008032214B4 (de) | Reluktanzmotor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CX01 | Expiry of patent term | ||
| CX01 | Expiry of patent term |
Granted publication date: 20060719 |