CN1167562C - 运行具有磁悬浮车辆的运输系统的装置 - Google Patents
运行具有磁悬浮车辆的运输系统的装置 Download PDFInfo
- Publication number
- CN1167562C CN1167562C CNB998030791A CN99803079A CN1167562C CN 1167562 C CN1167562 C CN 1167562C CN B998030791 A CNB998030791 A CN B998030791A CN 99803079 A CN99803079 A CN 99803079A CN 1167562 C CN1167562 C CN 1167562C
- Authority
- CN
- China
- Prior art keywords
- levitation
- vehicle
- linear motor
- transmission system
- magnetic
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000005339 levitation Methods 0.000 title claims abstract description 97
- 230000005291 magnetic effect Effects 0.000 title claims abstract description 61
- 230000005540 biological transmission Effects 0.000 claims abstract description 48
- 230000001939 inductive effect Effects 0.000 claims abstract description 5
- 230000008093 supporting effect Effects 0.000 claims description 20
- 238000012546 transfer Methods 0.000 claims description 19
- 230000005484 gravity Effects 0.000 claims description 14
- 230000004907 flux Effects 0.000 claims description 9
- 230000001105 regulatory effect Effects 0.000 claims description 7
- 238000007667 floating Methods 0.000 claims description 5
- 239000000725 suspension Substances 0.000 claims description 3
- 238000010276 construction Methods 0.000 description 5
- 238000013461 design Methods 0.000 description 5
- 238000005516 engineering process Methods 0.000 description 5
- 230000005284 excitation Effects 0.000 description 5
- 238000011161 development Methods 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 238000006073 displacement reaction Methods 0.000 description 3
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 238000005299 abrasion Methods 0.000 description 2
- 239000000696 magnetic material Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004880 explosion Methods 0.000 description 1
- 230000005294 ferromagnetic effect Effects 0.000 description 1
- 230000010365 information processing Effects 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L13/00—Electric propulsion for monorail vehicles, suspension vehicles or rack railways; Magnetic suspension or levitation for vehicles
- B60L13/10—Combination of electric propulsion and magnetic suspension or levitation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2200/00—Type of vehicles
- B60L2200/26—Rail vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Power Engineering (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Control Of Vehicles With Linear Motors And Vehicles That Are Magnetically Levitated (AREA)
- Non-Mechanical Conveyors (AREA)
- Vehicle Body Suspensions (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Abstract
本发明设计一种设施,用于运行具有磁悬浮车辆的运输系统。本发明的设施由一个集成化的传递系统构成,该传递系统包括一个用于感应传递电功率的能量传递系统,一个传递驱动功率的直线电机,和一个传递支撑力和/或者侧导向力的磁悬浮系统。
Description
技术领域
本发明涉及一种用于运行具有磁悬浮车辆的运输系统的装置。
背景技术
利用磁悬浮技术能够实现对作直线运动和转动构件进行无接触、并因而无摩损的支撑。磁悬浮技术在人员运输方面主要被用于高速下取代轮—轨接触;而在输送技术方面其特殊意义在于无磨耗、低噪音和低磨损。因而,这样的输送系统适用于对于卫生要求很高的环境中,如食品工业、制药业和医疗行业;同时,也适用于高纯空间或者是有爆炸危险的地方。就所输运的载荷与车辆的自重(空载重量)之比而言,在输送技术方面的数值也高于人员运输方面。
一个重要的着眼点是将车辆悬浮起来所需要的能量。在人员运输方面,该能量由于高速的缘故可以达到高于驱动功率的水平。在输送技术中,仅仅是几个米每秒的速度,显然太低了。因而,为了达到悬浮所需要的能量必须是由车辆自身提供的。
EP-A1 0 580 107中给出了一种磁悬浮-运输系统,其中悬浮车辆在一个轨道上由一个直线电机向前驱动。系统的缺点是,装置的体积大、机械系统复杂。
发明内容
本发明的目的是,提供一种运行带有磁悬浮车辆的运输系统的装置,它应当结构紧凑、占位少、并因而造价低。
为了实现该目的,本发明提出了一种带有一个轨道导向的磁悬浮车辆的运输系统的运行装置,具有集成化的传递系统,该传递系统带有用来感应传递电功率的能量传递系统,具有直线电机来传输驱动功率,并具有磁悬浮系统来传递支撑和/或侧导向力,其中,悬浮系统的主动的、受到调节的部分系统被安置在悬浮车辆上或旁,其中,设置了用来对悬浮系统的机械气隙进行调节的装置,其中,直线电机的主动的、受到调节的部分系统被安置在悬浮车辆上或旁,该能量传递系统对悬浮系统和直线电机的安置在悬浮车辆上或旁的部分系统提供电功率,设置了用来对悬浮系统的机械气隙、同时还用来对直线电机和/或者能量传递系统的机械气隙进行调节的装置。
利用本发明,能够将复杂的机械系统用无接触的系统来替换,这样的系统能够传递能量、和/或者传递驱动力、以及支撑力和侧导向力,特别是用在磁悬浮车辆中。它实现了无接触驱动的可移动系统的集成化。
本发明的、用于运行带有磁悬浮车辆运输系统的装置,具有一个集成的传递系统,传递系统带有能量传递系统,来实现电功率的感应传递,具有直线电机,来传递驱动能量;并具有磁悬浮系统,来传递支撑力和/或者侧导向力。该装置具有如下优点:集成化传递系统中的各个组成元件,在运行中动力学特性条件类似,并且在磁铁或机械公差中机械气隙条件类似。构造形式简单是其优点,特别是本发明的集成化传递系统可以是模件构造。另外的优点是,局部系统的装配简单,可能的电接头和连接技术简化,以及在可能需要部件更换时维护简单。
在一个优选的实施例中,传递系统被安置于移动系统、特别是悬浮车辆的外角处。其优点是传递系统的对称配置,因而可以灵活地使用一个移动系统,特别是前进和倒退行驶的条件可比较。这样,就使悬浮车辆行驶方向的改变简化了。
特别有利的是设置了一个转向架来容纳传递系统。在此优选的设置是,集成化传递系统分别被安置在与车厢相连接的转向架的两个外侧面上,其中转向架优选通过一个铰链与车厢进行连接,并且该铰链可分别绕相对于运行方向垂直的轴线转动。特别有利的设置是在车厢运行方向上的前后各安装一个转向架。将传递系统安置于与一个悬浮车辆的车厢相连接的转向架的两个端面处,是有利的。一种有利的设置为,在转向架和车厢之间设置一个万向球接头。这样,能够实现垂直面上特别小的弯道半径,当本发明的运输系统应用于上坡路段和下坡路段时具有优点。
本发明装置的一种有利的进一步构造中,磁悬浮系统的可移动的部分系统、特别是悬浮车辆,与转向架通过万向球接头相连接,具有两个独立的、可调节的单个磁铁。这样能够达到合适的动力学行驶特性,特别是在弯曲路段中。
在本发明装置的另一个有利改进构造中,传递系统具有与悬浮车辆固定连接在一起的传递器头部,它们被构造成向悬浮车辆外侧为U-形的,这样U-形腿沿垂直方向上下重叠并指向外侧。如果将U-形-轮廓伸入到传递系统的固定安置部分的轮廓中,则是特别有利的。特殊优点是这样能够在运输系统运行中使用被动式道岔。
本发明的另一种有利构造是,磁悬浮系统和直线电机的主动的、受调节的局部系统被安置于移动的悬浮车辆上或旁,其中最好利用借助于能量传递器传递的电能以及通过一个控制单元进行的可能的信息处理。其优点在于,能够使每个移动系统在行驶路线上的任何地点、在任何时刻都具有单独的行驶运行。特别的优点是,在相同的行驶路段上和/或者相同的行驶路段区段上,多个移动系统能够独立地运行。
根据本发明的另一个有利实施形式,磁悬浮系统具有一个可调节的机械气隙。优选设置法向力作用方向、特别是沿y-坐标轴方向的调节。该措施的优点是大大地减小了磨损,以及提供了可能性,将机械支撑元件仅仅构造为移动的悬浮车辆的防降和/或者辅助装置。
特别有利的是,设置了对磁悬浮系统的机械气隙进行调节的装置,同时又能对直线电机和/或者能量传递系统的机械气隙进行调节。该有利的组合使得无接触的传递系统具有最小化的气隙。其结果是,在与公知方案基本可比较的功率数据下,集成化传递系统的各个传递系统的重量与尺寸相比要小。与此相对应,当尺寸和质量相当时,可传递的功率和/或者驱动力则有利地得到提高。
在本发明装置的一种特别有利的改进结构中,直线电机被这样安置在悬浮车辆上,使得直线电机的重心和整个传递系统的重心,特别是考虑到载荷质量时,大体位于一个平面中(x-z-面),该平面与悬浮车辆的移动方向平行。这样,能够通过一个最小化的杠杆臂结合驱动力的作用,来控制悬浮车辆加速和减速时的干扰力矩。
磁悬浮系统在移动系统上和集成化传递系统中的一种良好的配置为,磁悬浮系统的气隙面(y-坐标轴)位于传递系统的整体移动系统的重心的上方,这里考虑到典型的载荷质量。其有利之处在于,这样可以避免运输系统的不稳定平衡的直立钟摆的特性。
有利的是,磁悬浮系统、直线电机、和能量传递器分别在垂直方向上上下重叠安置。这样基本上达到一种最优化的设置,具有最小化的干扰力矩,这是由于在避免了所不希望的不稳定平衡的钟摆特性的条件下受到驱动力作用,和/或者装置自身结构高度最小化的缘故。如果另外地使得传递器头部无机械间距地紧凑安置,则特别具有优点。这样,能够避免该装置的结构高度在其它情况下受必需的设计条件限制的高数值。
根据本发明,在另一种有利的改进构造中,能量传递器、磁悬浮系统和直线电机分别在垂直方向上下重叠地安置,并且,一方面能量传递器和磁悬浮系统的固定部分、另一方面悬浮系统的传递器头部和直线电机被紧邻地安置。这里的优点又是能够得到有利的小的结构高度。
磁悬浮系统具有一个带有磁导轭铁的磁铁,其中,磁铁与磁导轭铁均具有U-形横截面,U-形轮廓的腿互相相对。该设置的优点是具有有效的侧向导引力,它通过轮廓形状获得。移动系统因此得到稳定。
另一个有利构造是,集成化的传递系统具有一个机械导引系统,它被设置用于运输系统行驶道上被动式道岔中的方向控制。最好通过机械导引系统的一个轮对来进行一个侧向的行驶道导引。其中轮对作用到槽中,后者由磁悬浮系统的U-形磁导轭铁来构成。轮对优选处在移动的悬浮车辆的转向架上,并且能够成对地被安置于传递器头部(z坐标轴)装配位置的前或后,或者分别是轮对中的单个轮被安置于传递器头部装配位置的前或后。
在另一种具有优点的实施例中,悬浮系统的磁铁成对地相对安置,其中,传递器头部的可移动的、被固定于悬浮车辆上的部分搭接能量传递器的固定安置的部分。
有利的是,设计了装置,它们使得对磁悬浮系统的气隙进行调节成为可能,使此气隙具有可变化的数值。因而直线电机的法向力作为悬浮支撑被调节。通过磁悬浮系统的双侧结构使得它有利地得以实现,这是由于能够在正负两个方向(y-坐标轴)上对力进行调节。这样,能够使得系统的能量需求达到最低、损失达到最小。
磁悬浮系统的有利实施形式是,设置有装置,它们能够使磁导垂直于悬浮车辆的行驶方向。这样能够达到降低涡流损耗并提高有益的侧向导引力的目的。
附图说明
以下借助于图中的实施例对本发明予以进一步说明。其中,
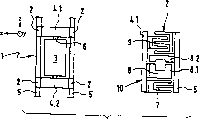
图1本发明的一个装置的俯视图和一个详图,
图2两个铰接装置的详图,
图3磁铁的两种安置,
图4支承磁铁的不同形式,
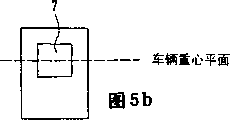
图5重心的合适设置,
图6集成化传递系统的一种实施形式的详图,
图7具有导引装置的悬浮车辆。
具体实施方式
在图1中示出了本发明的具有集成化传递系统的运输系统的配置。其中,悬浮车辆受到无接触式运行的直线电机的驱动,并且通过一个感应传递系统无接触地得到电能。一种优选的集成化传递系统的组成中包括:一个无接触式运行的能量传递系统,用于感应式传送电能;一个用来传递驱动力的直线电机;和一个磁悬浮系统,它的移动部分是悬浮车辆,而其固定部分在轨道上。
一个运输系统1,具有四个集成化的传递系统2。在它的俯视图的左半部,可以看到一个车厢3,带有一个前转向架4.1和一个后转向架4.2。它们被安装于一个悬浮车辆上,该车辆沿一个轨道5移动。悬浮车辆的细节未在这里示出。转向架4.1、4.2分别通过一个铰链6与车厢3连接起来。对称地在车辆的全部四个角处在转向架4.1、4.2的侧端部上分别安装了一个集成化的传递系统2。车辆能够沿z-坐标轴运动。在最简单的情况下铰链6可以是一个销,它允许在水平方向上的最好通过挡块限定的旋转、即绕y-轴的转动。在垂直方向上的转动是不允许的,并且要保证转向架4.1、4.2与车厢3基本上处于同一个平面内。铰链6的另一个适宜构造是一个万向球接头,它允许沿水平、垂直和方位角方向转动。这种转动可以通过挡块彼此独立地受到限制。对于在垂直方向上的曲线适用性有利的不仅是在转向架与车厢之间留有的缝隙,而且还有所谓的铰链刚性长度。
图1中右侧的详细图示出的是一个集成化传递系统2的横截面的细节。左面是轨道5的一部分,右侧可以看到一个转向架4.1、4.2。下部元件代表一个直线电机7,在它的上部安置着一个支承磁铁系统8,位于它上面的是能量传递器头部9。直线电机7、支承磁铁系统8和传递器头部9在这里分别具有一个固定部件和一个活动部件,前者被安置于轨道5上,而后者被安置于移动系统上并通过转向架4.1、4.2进行连接。这里,传递器头部9的移动部件具有U-形轮廓,它伸进到固定的对应件的E-形轮廓中。支承磁铁系统8具有一个下部构件8.1和一个磁导轭铁8.2,这二者均呈U-形,其轮廓腿互相对着。直线电机7的移动件具有U-形轮廓,它搭接固定侧上的轮廓。集成化传递系统2的构造是非常紧凑的,具有允许在系统中使用被动式道岔(passive Weichen)的优点。
在图2中简略示出了铰链6的两个实施例。在上图中是销铰链,分别位于转向架4.1、4.2至车厢3的两个侧边之间;在下图中是万向球接头,它位于转向架4.1或者4.2与车厢3之间。由于稳定性原因,并且由于自由度更大,万向球接头需要支承磁铁8的2-磁体配置。这是由于例如当车辆加速时转向架4.1、4.2在垂直方向上的倾翻通过一个1-磁体配置是不能避免的。而具有一个销铰链的装置,出于成本方面的原因,只能用1-磁体配置来实施。在此,车辆的刚性对于稳定性而言是足够的。然而,也可以设置2-磁体配置。
在图3中,以俯视图对支撑磁体的1-磁体配置与2-磁体配置进一步说明。在左侧的图中示出了一个1-磁体配置,说明了它适于结合一个位于转向架4.1、4.2和一个车厢3之间的销铰链6的原因。这里的悬浮车辆10具有四个支撑单元,它们带有支撑磁体8,这些支承磁铁分别由具有一个下部构件8.1和一个磁导轭铁8.2的支承磁铁构成。它们被安置于转向架4.1、4.2的侧端部上。在右侧的图中示出了一个2-磁体配置。这里的磁体均为集成化传递系统2的组成部分。最好是,每个磁体8都具有一个自身的气隙传感器来确定气隙的大小,以及一个自身的电流调节器。
图4中示出了支撑磁体8的有利构造。适宜的支撑磁体8是一个电磁铁,如图4a中所示的那样。在这种悬浮原理中,利用一个电磁铁对一个铁磁性轭铁的吸引力,在图中轭铁是由轨道5构成的。电磁铁的激励是通过通电线圈来实现的。由于该装置是不稳定的,气隙必须由气隙传感器进行测量并通过适当的线圈电流来使其稳定。另一种适宜的支撑磁体8由一种混合磁体构成。在这样的装置中,基本激发是由永磁体来承担的,它们与电磁铁相连接。这样能够实现车辆的节能磁悬浮。
原则上,车辆能够通过机械力或通过相应的结构元件如辊、橇,或者通过磁力在轨道上被导引。这里的导引既可以是主动的,也可以是被动的。
在一种属于主动式的电磁导引中,除了支撑磁体8外,还需要使用其它的电磁铁,它们将轨道上的车辆保持在导轨上或者使其位于导轨之间。为此,优选测量到导轨的侧向距离,并对导引磁铁相应地进行调节。
一种重量轻、成本低的替代物是被动导引。如果一个悬浮于导轨下的电磁铁侧向偏移,这时就产生了一个力,它将电磁铁拉回到中间位置上。该原理即是为大家共知的磁阻。由此形成弱的阻尼振动。悬浮车辆能够有利地通过磁阻力被导引,其中,可以进行侧向移动。为了能够实现稳定运行,对侧向的移动可能性要加以限制,优选通过挡轮来进行。与机械导引轮相比,这些挡轮并不是一直处于使用状态,因而它们能够更容易地被设计。特别有利之处在于,为了提高磁阻作用力,支撑轨道上沿行进方向上设置了一个槽,利用它可以提高侧向回复力,特别是大致提高一倍。
在图4b中示出了一个电磁铁,它作为支撑磁体8的下部构件8.1。它具有U-形磁轭8.3,其两个腿上缠绕着激励线圈11。激励线圈在图中并未示出。由于力仅与线圈中的电流有关,对于运行使用一个2-象限调节器已经足够了。
在图4c中示出了一个混合磁体。在此实施例中在电磁铁磁轭8.3的极面上安置了一块永磁材料12,其中,磁轭8.3的腿又带有图中并未示出的激励线圈11。对永磁材料厚度的选择,优先考虑使得混合磁体对于预定的极面与磁轭之间的气隙产生预定定的力,而无电流流过激励线圈11。为了改变所产生的力,或者是通过激励线圈11通电流来附加激励混合磁体,或者是去激励。这里应用四象限调节器是有利的。
在图4d中示出了支撑磁体8的另一个有利构造。一个具有较小磁作用气隙形式的电磁铁的优点和一个无电流时作用力形式的混合磁体的优点,在这里得到综合利用,成为所谓的组合式混合磁体。一个电磁铁磁轭8.3的磁极面仅部分地被永磁材料12覆盖。在图中,永磁材料12被制备于极面的外侧区域上,平行于磁轭8.3的槽。由于永磁材料12在两侧上与导电的磁轭8.3相接触,在那里形成磁短路。为了减少这种短路,有效的方法是在极面上附加开出一条槽,它平行于永磁材料12。根据永磁体12的设计,一个2-象限调节器来为电磁铁馈电应当是足够了。
支承磁铁8的另一种有利构造在图4e中以一个双回路配置的形式示出。支承磁铁8分别由一个电磁铁和一个永磁体构成,它们在机械位置上被前后或者并排地安置。
在所有的配置中,有利地使用一个导磁轭铁8.2,它呈U-形。为此,所附属的运行轨道5上的线路元件设置有槽,它同时还具有可以提高侧导引力的优点。在此,该线路元件必须承载与支承磁铁8的下部构件8.1同样的磁通。优点是,磁导轭铁8.2用薄板状铁制成,从而可以减小涡流损耗。
为了使得整个系统的配置尽可能稳定地构成,有利的是,这样设计系统,即,使磁悬浮系统的气隙面位于整个移动系统的重心之上。这在图5a中示出。优点是,在悬浮车辆中的一个典型载荷质量的作用同时得到考虑。在图5b中给出了直线电机7重心的合理设置。当直线电机7的重心与集成化的传递系统的重心大体上处于同一个平面内时,则是有利的。这时,系统特别稳定。
在图6中示出了集成化传递系统2的一个特别紧凑的配置。各传递系统的顺序在这里相对于图1中的实施例发生了变化。这里,能量传递器头部9在下面,直线电机7在中间,而磁悬浮系统8被安置于集成化传递系统的上部。
借助于图6中所示的集成化传递系统2的实施例,示出了一个具有机械导引、合理的而稳定配置。这一点由图7给出。尽管使用了一个磁支撑系统,出于对转向架4.1、4.2的安全因素的考虑,附加设置轮13是有利的。一方面,轮13被设置在转向架4.1、4.2的下侧,以便能够通过被动式道岔。这些轮13同时还能在突然断电或者其它系统失常的情况下来接管对车辆的控制。另外,轮13还可以被设置于转向架4.1、4.2的上侧上,因为,由于直线电机7和在支承磁铁系统8中使用混合磁铁时,当发生突然断电时,车辆的下降并非在任何的载荷状态下都可能。另一方面,轮13有利于通过通岔,这是由于轮13的摩擦力要高于一个偏移的支承磁铁所具有的磁阻力。这样,轮也能够在弯道行驶时被使用,以便提高弯道处的行驶速度。在转向架上,在传递系统2的区域中,转向架4.1、4.2的侧面分别安装有轮13。这样的实施形式特别适合于在被动式通岔中进行机械式方向控制。这里,一个轮对13作用到槽中,该槽是磁悬浮系统的U-形磁导轭铁8.2。轮13的设置,在这里可以是成对的,位于车厢3的前方或者是后面,也可以分别设置一个轮13,被安置于车厢3的前面或者后面。
磁悬浮系统的一个特别合理的磁导是使它相对于行驶方向(z-方向)垂直。磁导的类型影响运行时行驶方向上产生的涡流损耗,还影响系统的支撑力和侧导向力。由于支承磁铁8的支撑作用需要优先得到满足,法向力大于磁阻力,因而这样设计支承磁铁8,使磁铁8的法向力起支撑作用,而磁阻力被用于导引。如果磁导垂直于移动方向(垂直磁导),则相对于沿移动方向的磁导(平行磁导)而言,具有优点。一方面是在磁导轭铁8.3中的涡流损耗比平行磁导中要低,这是由于在磁铁8的可比较的移动中,在移动方向上磁通的变化很小。另一方面,在垂直磁导中,从轨道5伸出的磁轭表面通过磁轭8.2的侧向移动大于平行磁导的情况。这个更大的表面与磁场能量的变化相耦合,后者与侧向移动时的回复力成比例。通过轨道5上的开槽,另外可以使侧向导引力增大。
Claims (26)
1.带有一个轨道导向的磁悬浮车辆(10)的运输系统的运行装置,具有集成化的传递系统(2),该传递系统(2)带有用来感应传递电功率的能量传递系统(9),具有直线电机(7)来传输驱动功率,并具有磁悬浮系统(8,8.1,8.2,8.3)来传递支撑和/或侧导向力,其中,悬浮系统(8,8.1,8.2,8.3)的主动的、受到调节的部分系统被安置在悬浮车辆(10)上或旁,其中,设置了用来对悬浮系统(8,8.1,8.2,8.3)的机械气隙进行调节的装置,
其中,
直线电机(7)的主动的、受到调节的部分系统被安置在悬浮车辆(10)上或旁,该能量传递系统(9)对悬浮系统(8,8.1,8.2,8.3)和直线电机(7)的安置在悬浮车辆(10)上或旁的部分系统提供电功率,设置了用来对悬浮系统(8,8.1,8.2,8.3)的机械气隙、同时还用来对直线电机(7)和/或者能量传递系统(9)的机械气隙进行调节的装置。
2.如权利要求1所述的装置,
其特征为:
传递系统(2)被安置于悬浮车辆(10)的外角部上。
3.如权利要求1或2所述的装置,
其特征为:
设置了一个转向架(4.1,4.2)来容纳传递系统(2)。
4.如权利要求1至2之一所述的装置,
其特征为:
在转向架(4.1,4.2)与车厢(3)之间设置了一个铰链(6)。
5.如权利要求1至2之一所述的装置,
其特征为:
传递系统(2)被安置在一个转向架(4.1,4.2)的外侧面上,转向架与悬浮车辆(10)的车厢(3)相连接。
6.如权利要求1至2之一所述的装置,
其特征为:
传递系统(2)被安置于一个转向架(4.1,4.2)的两个侧端面上,转向架与悬浮车辆(10)的车厢(3)相连接。
7.如权利要求1至2之一所述的装置,
其特征为:
在悬浮车辆(10)的行驶方向上,转向架(4.1,4.2)被安置于悬浮车辆(10)的车厢(3)的前面或者后面。
8.如权利要求1至2之一所述的装置,
其特征为:
悬浮系统(8,8.1,8.2,8.3)的一个可移动的部分系统(8.1,8.2)具有两个独立的、可调节的单个磁铁(8.1,11),以便于施加支撑力。
9.如权利要求1至2之一所述的装置,
其特征为:
传递系统(2)具有与悬浮车辆(10)固定连接的传递器头部(9),它们在悬浮车辆(10)的外侧上构造成U-形,从而使得U-形的腿在垂直方向上互相叠置并指向外侧。
10.如权利要求1至2之一所述的装置,
其特征为:
传递系统(2)的与悬浮车辆(10)固定连接部分的传递器头部(9)轮廓,伸入到传递系统(2)的固定不动部分的轮廓中。
11.如权利要求1至2之一所述的装置,
其特征为:
将直线电机(7)这样安置在传递系统(2)上,使得直线电机(7)的重心和整个传递系统(2)的重心位于一个平行于悬浮车辆(10)移动方向的平面中。
12.如权利要求1至2之一所述的装置,
其特征为:
将直线电机(7)安置在悬浮车辆(10)上,使得直线电机(7)的重心和悬浮车辆(10)、传递系统(2)中固定于悬浮车辆(10)上的部分、以及载荷质量的共同重心位于一个平行于悬浮车辆(10)移动方向的平面中。
13.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)的气隙面被这样集成到传递系统(2)中,使得它位于传递系统(2)的重心的上方。
14.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)的气隙面被这样集成到传递系统(2)中,即,它被设置于悬浮车辆(10)和固定于悬浮车辆(10)上的传递系统(2)的部分及直线电机(7)的共同重心的上方。
15.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)、直线电机(7)和能量传递系统(9)分别在垂直方向上上下重叠地被安置。
16.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)、直线电机(7)和能量传递系统(9)分别在垂直方向上上下重叠地被安置,其中,悬浮系统(8)被安置于直线电机(7)之上。
17.如权利要求1至2之一所述的装置,
其特征为:
被固定于悬浮车辆(10)上的悬浮系统(8)的部分与直线电机(7)被紧紧相邻无机械间距地安置。
18.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)、直线电机(7)和能量传递器(9)分别在垂直方向上下重叠地被安置,其中,悬浮系统(8)在上、直线电机(7)居中、而能量传递器(9)被安置于下部。
19.如权利要求1至2之一所述的装置,
其特征为:
在垂直方向上的配置中,能量传递器(9)在上,磁悬浮系统(8,8.1,8.2,8.3)居中、直线电机(7)被安置于下部,从而一方面能量传递器(9)和磁悬浮系统(8,8.1,8.2,8.3)的固定不动部分、另一方面悬浮系统(8)的固定于悬浮车辆(10)上的部分和直线电机(7)被紧紧相邻地安置,没有机械间距。
20.如权利要求1至2之一所述的装置,
其特征为:
磁悬浮系统(8,8.1,8.2,8.3)具有一个带有磁导轭铁(8.2)及轭铁(8.3)的磁铁(8.1),其中,磁导轭铁(8.2)具有U-形横截面,其腿朝向磁铁(8.1)。
21.如权利要求1至2之一所述的装置,
其特征为:
集成化的传递系统(2)具有一个导引系统(13),它被设置用于在一个被动式道岔和/或者侧导向中进行方向控制。
22.如权利要求1至2之一所述的装置,
其特征为:
导引系统具有一个轮对(13),其中轮对(13)作用到一个槽中,该槽是U-形的磁导轭铁(5,8.2)。
23.如权利要求1至2之一所述的装置,
其特征为:
悬浮系统(8)的磁铁(8.1,8.3)是成对、并且相对安置的。
24.如权利要求23所述的装置,
其特征为:
悬浮系统(8)中被固定于悬浮车辆(10)上的部分搭接悬浮系统(8)的被固定地安置于轨道(5)上的部分。
25.如权利要求1至2之一所述的装置,
其特征为:
直线电机(7)的法向力被设置用来作为悬浮的支撑。
26.如权利要求1至2之一所述的装置,
其特征为:
磁导轭铁(8.2)相对于固定于悬浮车辆(10)上的悬浮系统(8.1,8.3)的部分被这样定向,即,磁通被垂直于悬浮车辆(10)行驶方向导向。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19801586A DE19801586A1 (de) | 1998-01-19 | 1998-01-19 | Anordnung zum Betreiben eines Transportsystems mit einem magnetischen Schwebefahrzeug |
| DE19801586.0 | 1998-01-19 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1291146A CN1291146A (zh) | 2001-04-11 |
| CN1167562C true CN1167562C (zh) | 2004-09-22 |
Family
ID=7854871
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB998030791A Expired - Fee Related CN1167562C (zh) | 1998-01-19 | 1999-01-18 | 运行具有磁悬浮车辆的运输系统的装置 |
Country Status (11)
| Country | Link |
|---|---|
| US (1) | US6502517B1 (zh) |
| EP (1) | EP1049601B1 (zh) |
| JP (1) | JP3857049B2 (zh) |
| KR (1) | KR100583677B1 (zh) |
| CN (1) | CN1167562C (zh) |
| AT (1) | ATE217268T1 (zh) |
| AU (1) | AU749681B2 (zh) |
| BR (1) | BR9907030B1 (zh) |
| CA (1) | CA2322888C (zh) |
| DE (1) | DE19801586A1 (zh) |
| WO (1) | WO1999036287A1 (zh) |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10240080A1 (de) | 2002-08-30 | 2004-03-11 | Siemens Ag | Verfahren zum draht- und berührungslosen Energie- und Datentransport und zugehörige Vorrichtung |
| DE10334737A1 (de) * | 2003-07-29 | 2005-02-24 | Rexroth Indramat Gmbh | Berührungslose Energieversorgung für bewegte Verbraucher |
| DE10334736A1 (de) * | 2003-07-29 | 2005-02-17 | Rexroth Indramat Gmbh | Linearmotor mit Fortbewegungsregelung |
| GB2428232B (en) * | 2005-07-09 | 2008-02-13 | Anthony Cuthbert | Traction arrangements |
| CN100554029C (zh) * | 2005-12-30 | 2009-10-28 | 中国科学院电工研究所 | 直线感应电动机牵引运载装置 |
| CN101121384B (zh) * | 2006-08-08 | 2011-05-04 | 彭雪明 | 一种磁悬浮列车的驱动系统 |
| DE102006050201A1 (de) * | 2006-10-25 | 2008-04-30 | Robert Bosch Gmbh | Transversalflussmaschine und Verfahren zur Herstellung einer Transversalflussmaschine |
| US20090026869A1 (en) * | 2007-07-24 | 2009-01-29 | Christian Kaehler | Transverse flux reluctance machine and method for manufacturing same |
| GB2461578A (en) | 2008-07-04 | 2010-01-06 | Bombardier Transp Gmbh | Transferring electric energy to a vehicle |
| GB2461577A (en) | 2008-07-04 | 2010-01-06 | Bombardier Transp Gmbh | System and method for transferring electric energy to a vehicle |
| DE502008002888D1 (de) * | 2008-09-09 | 2011-04-28 | Siemens Ag | Transfervorrichtung mit dynamisch veränderbaren Antriebsbereichen |
| GB2463692A (en) | 2008-09-19 | 2010-03-24 | Bombardier Transp Gmbh | An arrangement for providing a vehicle with electric energy |
| GB2463693A (en) | 2008-09-19 | 2010-03-24 | Bombardier Transp Gmbh | A system for transferring electric energy to a vehicle |
| WO2012089341A2 (de) * | 2010-12-30 | 2012-07-05 | Robert Bosch Gmbh | Magnetgelagerte positionierachse |
| KR101525559B1 (ko) * | 2013-11-14 | 2015-06-03 | 한국철도기술연구원 | 공심형 3상 지상코일을 이용한 선형 추진 및 무선 급전 시스템 |
| US9764648B2 (en) | 2015-02-08 | 2017-09-19 | Hyperloop Technologies, Inc. | Power supply system and method for a movable vehicle within a structure |
| US10958147B2 (en) | 2015-02-08 | 2021-03-23 | Hyperloop Technologies, Inc. | Continuous winding for electric motors |
| KR101922197B1 (ko) | 2015-02-08 | 2018-11-26 | 하이퍼루프 테크놀로지스 인코퍼레이티드 | 수송 시스템 |
| WO2016126506A1 (en) | 2015-02-08 | 2016-08-11 | Hyperloop Technologies, Inc. | Low-pressure environment structures |
| WO2016126492A1 (en) | 2015-02-08 | 2016-08-11 | Hyperloop Technologies, Inc. | Deployable decelerator |
| US9641117B2 (en) | 2015-02-08 | 2017-05-02 | Hyperloop Technologies, Inc. | Dynamic linear stator segment control |
| US9599235B2 (en) | 2015-02-08 | 2017-03-21 | Hyperloop Technologies, Inc. | Gate valves and airlocks for a transportation system |
| US10897216B2 (en) | 2015-10-29 | 2021-01-19 | Hyperloop Technologies, Inc. | Variable frequency drive system |
| CN105346408A (zh) * | 2015-11-03 | 2016-02-24 | 西南交通大学 | 一种基于错位结构的串联型永磁混合悬浮装置 |
| CN105346409B (zh) * | 2015-11-03 | 2017-12-19 | 西南交通大学 | 一种用于永磁电动式磁悬浮列车的圆筒型悬浮装置 |
| WO2017172786A1 (en) | 2016-03-28 | 2017-10-05 | Hyperloop Technologies, Inc. | Metamaterial null flux magnetic bearing system |
| CN109139723A (zh) * | 2018-09-20 | 2019-01-04 | 常州明磁卓控智能科技有限公司 | 一种磁悬浮电机用联轴器 |
| CN109552054B (zh) * | 2019-01-18 | 2023-12-05 | 张述成 | 一种磁浮驱动升降弓装置 |
| CN110014848B (zh) * | 2019-04-19 | 2023-11-07 | 西南交通大学 | 一种用于磁悬浮列车的推进装置 |
| CN111942163B (zh) * | 2020-07-07 | 2022-09-27 | 西南交通大学 | 一种永磁磁轮的磁悬浮汽车 |
| CN111942162B (zh) * | 2020-07-07 | 2022-09-27 | 西南交通大学 | 一种磁悬浮汽车 |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE2220735A1 (de) * | 1972-01-20 | 1973-11-08 | Krauss Maffei Ag | Anordnung zum beruehrungsfreien magnetischen tragen eines schwebefahrzeugs im bereich einer fahrbahnverzweigung |
| US3850109A (en) * | 1973-04-30 | 1974-11-26 | Massachusetts Inst Technology | Transportation system employing magnetic levitation, guidance and propulsion |
| DE3411190C2 (de) * | 1984-03-27 | 1986-11-06 | Messerschmitt-Bölkow-Blohm GmbH, 8012 Ottobrunn | Magnetregler für Langstator-Magnetschwebefahrzeuge |
| US4730566A (en) | 1984-09-18 | 1988-03-15 | Porter Sewing Machines, Inc. | Automatic pocket label stitcher |
| EP0179188B1 (en) * | 1984-10-23 | 1990-07-25 | Kabushiki Kaisha Toshiba | Transporting system of floated carrier type |
| JPS631305A (ja) * | 1986-06-20 | 1988-01-06 | H S S T:Kk | リニアモ−タカ−の可撓式台車構造 |
| JP2584473B2 (ja) * | 1988-02-25 | 1997-02-26 | 財団法人鉄道総合技術研究所 | 超伝導磁気浮上鉄道用クロスアンカ連接台車形低床車両 |
| JPH01315204A (ja) * | 1988-03-30 | 1989-12-20 | Toshiba Corp | 吸引式磁気浮上装置 |
-
1998
- 1998-01-19 DE DE19801586A patent/DE19801586A1/de not_active Withdrawn
-
1999
- 1999-01-13 US US09/600,585 patent/US6502517B1/en not_active Expired - Lifetime
- 1999-01-18 KR KR1020007007915A patent/KR100583677B1/ko not_active IP Right Cessation
- 1999-01-18 JP JP2000540020A patent/JP3857049B2/ja not_active Expired - Fee Related
- 1999-01-18 AT AT99903641T patent/ATE217268T1/de active
- 1999-01-18 BR BRPI9907030-8B1A patent/BR9907030B1/pt not_active IP Right Cessation
- 1999-01-18 AU AU24219/99A patent/AU749681B2/en not_active Ceased
- 1999-01-18 CA CA002322888A patent/CA2322888C/en not_active Expired - Fee Related
- 1999-01-18 EP EP99903641A patent/EP1049601B1/de not_active Expired - Lifetime
- 1999-01-18 WO PCT/EP1999/000259 patent/WO1999036287A1/de active IP Right Grant
- 1999-01-18 CN CNB998030791A patent/CN1167562C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| ATE217268T1 (de) | 2002-05-15 |
| AU749681B2 (en) | 2002-07-04 |
| EP1049601B1 (de) | 2002-05-08 |
| CN1291146A (zh) | 2001-04-11 |
| JP3857049B2 (ja) | 2006-12-13 |
| KR20010040363A (ko) | 2001-05-15 |
| WO1999036287A1 (de) | 1999-07-22 |
| CA2322888A1 (en) | 1999-07-22 |
| CA2322888C (en) | 2007-09-04 |
| BR9907030A (pt) | 2000-10-24 |
| BR9907030B1 (pt) | 2013-06-25 |
| KR100583677B1 (ko) | 2006-05-25 |
| JP2002509420A (ja) | 2002-03-26 |
| AU2421999A (en) | 1999-08-02 |
| DE19801586A1 (de) | 1999-07-22 |
| EP1049601A1 (de) | 2000-11-08 |
| US6502517B1 (en) | 2003-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1167562C (zh) | 运行具有磁悬浮车辆的运输系统的装置 | |
| CN111373097B (zh) | 采用无源低频电磁稳定化的永磁磁悬浮列车 | |
| US7096794B2 (en) | Inductrack configuration | |
| US6684794B2 (en) | Magnetically levitated transportation system and method | |
| US6101952A (en) | Vehicle guidance and switching via magnetic forces | |
| US20070044676A1 (en) | Guideway activated magnetic switching of vehicles | |
| KR20050059230A (ko) | 자력을 사용하는 서스펜션, 가이드 및 추진 차량 | |
| US4979445A (en) | Magnetically levitated vehicle with superconducting mirror sheets interacting with guideway magnetic fields | |
| CA2437223A1 (en) | Monorail system | |
| CN106926743A (zh) | 涡流阻尼器及磁悬浮车 | |
| JP2008167636A (ja) | 磁気浮上装置 | |
| EP3471996B1 (en) | Magnetic suspension for a vehicle | |
| CN1076677C (zh) | 双向电磁铁控制永磁悬浮及导向装置 | |
| CN206841206U (zh) | 涡流阻尼器及磁悬浮车 | |
| KR20120004865A (ko) | 스프링을 갖는 자기부상 이송 시스템 | |
| CN116198334A (zh) | 一种磁悬浮列车及其控制方法 | |
| JPS61224808A (ja) | 浮上式搬送装置 | |
| CN217435709U (zh) | 一种混合磁悬浮交通系统 | |
| JP2760491B2 (ja) | 浮上式搬送装置 | |
| CN115547906A (zh) | 一种单轨柱面可侧倾磁悬浮天车 | |
| JPS5886807A (ja) | 吸引力形磁気浮上車両 | |
| JP2713885B2 (ja) | 浮上式搬送装置 | |
| JPS627301A (ja) | 浮上式搬送装置 | |
| CN117922307A (zh) | 磁浮列车及永磁悬浮系统与控制方法 | |
| JPH03200468A (ja) | リニア台車の停止位置決め装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20040922 Termination date: 20150118 |
|
| EXPY | Termination of patent right or utility model |