CN1160011A - 同步穿梭电梯系统 - Google Patents
同步穿梭电梯系统 Download PDFInfo
- Publication number
- CN1160011A CN1160011A CN96121364A CN96121364A CN1160011A CN 1160011 A CN1160011 A CN 1160011A CN 96121364 A CN96121364 A CN 96121364A CN 96121364 A CN96121364 A CN 96121364A CN 1160011 A CN1160011 A CN 1160011A
- Authority
- CN
- China
- Prior art keywords
- compartment
- crane
- floor
- floor district
- make
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/2408—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration where the allocation of a call to an elevator car is of importance, i.e. by means of a supervisory or group controller
- B66B1/2458—For elevator systems with multiple shafts and a single car per shaft
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B1/00—Control systems of elevators in general
- B66B1/24—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration
- B66B1/2408—Control systems with regulation, i.e. with retroactive action, for influencing travelling speed, acceleration, or deceleration where the allocation of a call to an elevator car is of importance, i.e. by means of a supervisory or group controller
- B66B1/2491—For elevator systems with lateral transfers of cars or cabins between hoistways
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B9/00—Kinds or types of lifts in, or associated with, buildings or other structures
- B66B9/003—Kinds or types of lifts in, or associated with, buildings or other structures for lateral transfer of car or frame, e.g. between vertical hoistways or to/from a parking position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/30—Details of the elevator system configuration
- B66B2201/303—Express or shuttle elevators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/30—Details of the elevator system configuration
- B66B2201/304—Transit control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B2201/00—Aspects of control systems of elevators
- B66B2201/30—Details of the elevator system configuration
- B66B2201/306—Multi-deck elevator cars
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Structural Engineering (AREA)
- Elevator Control (AREA)
- Types And Forms Of Lifts (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Abstract
可水平移动的电梯车厢A-E在两个相邻井道的两个电梯HI,LO的吊车架(72)之间和在吊车架及下述层次的登层区L,R之间被转移,井道延伸在一个楼房的至少三个层次(GND,MID,SKY)之间。各吊车在井道中的垂直运动是同步的各电梯车厢在各登层区与各吊车架之间的转移是同时进行的。
Description
本发明涉及延伸在三个或多个层次上、具有井道外的的乘客上载及量载并能完全利用所有井道的高乘载容量的同步穿梭电梯系统。
在传统电梯提升系统中的钢系绳的净重力限制了行程的实际长度。为了到达超过该极限的高楼层部分,通常将乘客送达高空走廊,乘客从那里徒步到能常他们到楼高层的其它电梯。但是,来去的乘客通常是无序的,并使乘客在上楼或下楼时的稳定流量打乱。
所有要去楼上层的乘客必须经过楼的下层向上乘行。因此,当楼愈高,愈来愈多的乘客必须经过下层乘行,就需要愈来愈多的楼部分专用于电梯井道(以下称为“心墙”)。使适量的乘客移动到楼上层所需的心墙量的减少就必须增加每个电梯井道的有效使用。例如,公知的双层吊车能使乘载高峰期移动的乘客量增倍,由此能使所需的井道数几乎减少一半。在井道中具有多个车厢移动的建议包括双悬吊系统,在其中由于绳索比,上部车厢移动的距离是下部车厢移动距离的两倍;及在井通的侧壁上用线性电动机(LIMS)驱动的电梯,由此除消钢丝绳的需要。但是,双悬吊系统对于使乘客输送到很高楼房的高空走廊无济于事;而LIMS还未实用,主要因为没有配重,电机部件及功率损耗过大。
为了能到达较高的距离,一个电梯车厢可移动到第一井道中的第一吊车架中,从地面层向上到一个转移层上,水平地移到第二井道中的第二电梯吊车架,并在该第二井道中向楼的上部移动,并如此进行下去,正如在共享的同时递交的未决专利申请系列号No…(律师记录号No.OT-2230)中所公开的。但是,该申请的系统在多个井道中仅具有单个车厢的转移,在其中当前无车厢移动的井道则空着,因而浪费心墙。
因为乘客的上载及下载需要相当的时间,与快速电梯运行相反,另一方式是增加井道利用率,由此减少心墙的需要,该方式包括使电梯车厢离开井道以便下载及上载,正如在共享的同时递交的未决专利申请系列号No…(律师记录号No.OT-2297)中所描述的。虽然该申请的系统非常有效,但它限制在仅两个层次之间运载。
本发明的目的在于设置一种电梯系统,它可延伸在多于两个层次之间,由此获得的移动乘客距离几乎是钢丝绳系统给出的距离极限的两倍,它使井道的利用率达到最大,并提供了井道外的乘客上载及下载。
根据本发明,一种电梯系统包括至少两个井道,每个井道具有可在其中移动的吊车架,及多个可水平移动的电梯车厢,同时地将一个车厢从一个登层区移到吊车架及使另一车厢从该吊车架移到另一吊车架。接着根据本发明,一个车厢可移动到第二吊车架,并与另外吊车架同时地到达另外登层区。根据本发明,在车厢移入到吊车架前使乘客上载到车厢中,并在车厢从吊车架中移出后使乘客下载。根据本发明,车厢在登层区上上载,移动到吊车架上,吊车架被移动到另一层,车厢被移到另一吊车架,然后车厢被移动到第三层,从那里它被移到登层区以便下载。根据本发明,车厢以这样的方式同步地在各登层区之间移动,以使得在第一及第二层次之间和在第二及第三层次之间,并在第一及第三层次之间在双方向上规则地处理乘载;并根据本发明,这样安排同步运行,即要到一具体目的地的车厢总是从同一原始登层区离开并总是到达相同的目的登层区。再根据本发明,车厢可为双层车厢,以致要到目的地的乘客可从两个登层区的任一个上离开,一个紧位于另一个上方,并总是到达相应的登层区,这些登层区也是一个在另一个的上方。并根据本发明,可得到双层操作,以使得其间一个车厢可从上登层区也可从下登层区以重复循环方式到达相同的给定目的地。再根据本发明,通过多层次,多井道系统同步地转移的电梯车厢总是沿相同路径,重复地从一个登层区到另一登层区。
本发明可根据需要使用三个,四个或多个登层区。本发明获得每个井道的很高利用率,尤其是以双层方式操作时,并允许从任何给定原始层频繁地驶向任何给定目的地。双层厢的实施例在节省心墙及不会使乘客运行混乱方面特别有用。
借助于以下对附图中所示实施例范例的详细描述,将会使本发明的另外目的,特征及优点更加阐明。附图为:
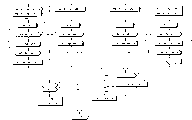
图1-40是根据本发明实施例的一对穿梭电梯的同步操作的概要示图;
图41是图1-40中所示同步穿梭电梯的简化剖割侧视图;
图42-46是根据本发明一个实施例的一对穿梭电梯当系统关机(例如在周末前)时的同步操作概要示图;
图47-50是根据本发明一个实施例的一对穿梭电梯当系统起动(例如周末后)时的同步操作概要示图;
图51是图1-40所示操作的简化表示;
图52是表示图54的组合同步变型的部分流程图;
图53是使图41的同步穿梭电梯根据图1-40,及42-52操作的吊车/车厢控制程序的逻辑流程图;
图54是用于图53程序中的车厢控制子程序的逻辑流程图;
图55-57是用于图53程序中的车厢控制子程序的逻辑流程图;
图58是用于图53程序中的转移控制子程序的逻辑流程图;
图59是用于图41的实施例的执行电梯车厢转移的装置的部分切割、部分剖视侧视图;
图60-65是根据使用双层电梯的另一实施例的一对穿梭电梯的同步操作概图;
图66是根据用于四个层次的另一实施例的四个穿梭电梯的同步操作概图;
图67是根据具有四层次平衡服务的另一实施例的9个穿梭电梯的同步操作概图。
实施本发明的最佳方式
首先参照图41(附图第4页),本发明一个实施例的同步穿梭电梯系统包括延伸在一个楼房的三个层次GND,MID,SKY之间的两个电梯,每个层次设有右登层区R及左登层区L并具有电梯井道门70,所有左登层区及中间层次右登层区的门70用实线表示为它们是关闭的,高空层次及地面层次的右登层区的井道门用虚线表示为它们是打开的。
每个电梯LD,HI包括具有一个由电机驱动的吊绳系统73悬挂的车厢吊架72的吊车,通常形式的绞轮和制动系统74及配重75。以下为了简要起见,电梯车厢吊架以及每个整体电梯均用它们的标记LO,HI来称呼并简称为吊车。
在图41上共有五个电梯车厢A-E,它们每个在其左侧(L)及右侧(R)均具有电梯门76。车厢A-C的电梯门用实线表示,表明它们是关闭的。车厢D及E的右电梯门用虚线表示它们是打开的,而这两个车厢的左电梯门用实线表示它们是关闭的。如通常情况那样,当一车厢处于着落位置,电梯门与井道门相耦合,因此电梯车厢门的打开及关闭伴随着相邻井道门的打开及关闭;这里,说到门的打开或关闭意味着涉及车厢门及与车厢门相邻的井道门。一对箭头71指示高空层次及地面层次的右登层区的电梯车厢门及井道门是打开的;这些箭头也被用在下述的图1-40,42-51及60-67中表示该情况。
图41绘示在高空及地面层次上的车厢D及E,它们的门打开着,以便在车厢及地面间交换乘客。图41也绘出朝右转移的车厢A-C:车厢C正离开中间层次左侧地面(MIDL)并将登上下电梯(LO)的车厢吊架72;车厢A正离开下电梯的车厢吊架72,经由一支承78并将进入上电梯(HI)的车厢吊架72;车厢B正离开上电梯(HI)的车厢吊架72并将进入中间层次右侧地面(MIDR)。在图41所示时刻后的几秒钟内,车厢B将完全登上MIDR的地面(类似于图41中的车厢D及E),车厢C将完全放置在LO吊车上及车厢A将完全放置在HI吊车上。在吊车及地面之间的车厢转移方式将在下面参照图59来描述。
本发明的一个特征是根据本发明的同步操作总能允许对每个层面指定一个单一的目的地,离开该层面的一个车厢将总是驶向该目的地,这如图41的图面所表示的:一个离开高空层次SKYL的车厢总是驶到中间层次(MIDR,见下述),余依此类推;一个离开SKYR的车厢将驶到地面层次(GNDR,见下文);参照图1-40及51,本发明的该特征将变得更明显。
对本发明的操作将从图1开始描述,其状态为:车厢A处于地面层次及下电梯中;车厢E处于GNDR层面;车厢C处于MIDL层面;车厢D处于SKYR层面;及车厢B处于高空层次及HI吊车中。在高空及地面层次上向右指的箭头表示车厢B和D及车厢A和E刚被转移到右侧。这种转移发生在作为周期No.1的控制时钟确定的周期中,它在下文中称为CRTL=1。类似地,图1-40中每个所描绘的动作、位置及状态均发生在控制时钟的同一序号的周期中。正如看到的,在每个奇数号的图1-39中,发生车厢向右或向左、进入及离开层面和吊车的转移,如每个奇数号的附图中的箭头指示的。在每个偶数号附图2-40中,上、下电梯吊车在相反的方向上行驶,即如每个偶数号图中垂直箭头所示的垂直方向上行驶,并且某些门打开及某些门关闭着,如每个偶数号附图中水平箭头所示。
参照图2,车厢A已向上行驶及车厢B已向下行驶,并由此都位于中间层次。车厢C的门关闭及车厢D及E的门开启。然后,在图3中,车厢C,A及B全都转移到右侧(如图41中所示),车厢D及E的门保持开启。在图4中,车厢B的门被打开以允许乘客进入中间层次,而车厢D及E的门被关闭以准备将这些车厢转移。当车厢A及C分别在上、下吊车中向上及向下移动时发生门的打开及关闭。在图5中,车厢A及D被转移到高空层次的左侧,及车厢C和E被转移到地面层次的左侧。在这个专门的实施例中在每个情况下,地面及高空层次上的车厢是同时地向左侧及同时地向右侧转移的;在另外的实施例中,它们不需要这样。在图6中,车厢A和C的门被打开允许乘客从其中出来:从车厢A中出来到高空层次上的乘客是如图1中所示在地面层次上车厢A中的乘客。因此,这些乘客在LO吊车中从地面层次驶到中间层次,转移到HI吊车,然后在HI吊车中向上驶到高空层次。另一方面,从车厢C中出来的乘客是在图1中所示那时从中间层次进入车厢。在图6中,车厢B的门关闭以准备当车厢E,D及B移向左侧时使车厢B转移到图7中的上吊车中。
以上所述的操作持续地进行,每个车厢离开具体的层面并在相同的具体路径上行驶到另外的层面,每个车厢在相同路径上依次地跟随在其前面的车厢。
参照图36,车厢A在下电梯中向下行驶到地面层次,然后与车厢C一起被移到左侧,如图37中所示;接着A车厢的门打开允许其中乘客出来,如图38中所示。在图40中,车厢A的门被关闭以准备被移到如图1中所示的右侧,这如上所述。然后,只要本发明的同步穿梭电梯系统在工作,便持续地重复图1-40中所指示的过程。当两个车厢向上或向下行驶时,另外的车厢停在层面上并开启着门以允许与层面交换乘客。一个车厢每八个控制周期、例如CTRL=0,8,16,24,32及0从给定层面再次离开。在常规操作中,每个车厢行驶的路程表示在图52中:GND-SKY;SKY-MID;MID-SKY;SKY-GND;GND-MID;MID-GND。
如果系统要停止运行,例如当在周末时只需少量的系统,或由于另外的原因,则需要稍微不同的操作,以使得将所有的车厢引导到一个层面,使乘客走出到层面上。在这里的简化实施例中,停止系统的运行(如在周末)仅允许从控制周期34通过关掉服务标志(例如图41中,“运行到地面层次”)开始;另外在控制周期34及35中的操作与图34及35中所示相同。图42与图36相同,但除车厢D的门关闭外,这将伴随着警报及服务标志消失,因此在此时没有乘客能进入车厢D。控制周期37中的操作变更为如图43中所示。具体地,车厢C和E未从接房中释放,因此未如图37中所示地被转移到左侧;而是,车厢A及B被转移到左侧,及车厢E和D分别留在高空层次右层面及地面层次右层面。但是,由于门关着将没有乘客进入车厢E和C,因为当控制周期34期间当车厢E和C的门打开使乘客出去到层面上时(如图34所示),将发出警报。警报意味着大声的刺激噪音,它将警告人们使他们不进入电梯,也可以在车厢中设有闪烁开、关的灯光。此外在控制周期34中服务标志已被关断以使其表现为该电梯已脱离服务。如果需要、为了驱使乘客从车厢中出来,门随着灯的关闭12警报启动以很慢的速度关闭。在任何情况下,如图43中所示,在控制周期37期间车厢C和E门关着地保持在原地。在控制周期38上,车厢A及B的门打开以便让乘客出来。如前对于车厢C及E所述的那样,警报将被启动及服务标志将被关掉,因此,此时乘客将不会进入车厢A和B。在图45所示的控制周期39期间,所有车厢静止不动,车厢C,D及E的门被关闭,车厢A及B的门打开,随着警报启动使乘客出来。然后在控制周期O时,如图46中所示,车厢A及B的门关闭,并在上述的警报中进行。另一方面,如果牵引系统(电动机及制动装置)不适以抵抗配重的上拉保持空车厢,在关机时可使两个车厢留在吊车的吊架中。在这种情况下,所有的车厢首先必须被清空且无回载,如上所述,并在每个层面上带着警报简单地驶过一组状态(例如,图30-37中的所有状态)。
为了起动该系统,假定是在图46所示的状态下关机的,所有要做的事只是打开车厢门允许乘客进入车厢E和C,将这些车厢转移到左侧并开始正常工作。为了作到这个,控制被迫进入周期35,车厢E和C的门被打开,如图47中所示,及服务标志被开通以显示离开每层面的车厢的目的地。为了有时间能让乘客进入车厢,在使控制进入图48所示的周期36前设有一个延时。在控制周期36中,车厢C及E的门关闭和车厢D的门打开(与图36中所示的常规操作相同)。然后在控制周期37中,车厢C和E被转移到左侧,但是,车厢A和B总是在左侧位置,因此不被转移。在控制周期37结束时,其状态与常规操作期间控制周期37结束时的状态相同。然后,从控制周期38(图50)开始,操作完全与常规操作期间完全相同(如图38中所示)。因而,在下文中将参照控制对所有这些操作进行更详细的解释。
现在参照图53,一个组合的吊车/车厢控制程序用以确定是否运行正常、关机、开始或结束。它也访问执行对电梯吊车及车厢专门同步控制的子程序。该程序通过进入点100到达第一检验步骤101,以确定电梯管理系统(EMS)是否请求该两电梯穿梭系统的起动运行。如果是,第一步骤102置“起动”标志及第二步骤103清除“运行关闭”标志。控制计数器(下文将更全面地描述)在步骤104上被置为35由此引起如上文中相应图47开始的起动。在步骤105上所有的服务标志(图41中文字说明)被开启,步骤106将EMS请求复位到开启运行。另一方面,如果没有被EMS指令开始起动,则在检验步骤101上的否定回答将旁路所有的步骤102-106。
在检验步骤107上确定是否EMS已指令运行结束。如果是,检验步骤108确定是否控制置到第34周期。如果是,步骤108的肯定结果将导致到步骤109,它置入“结束”标志,步骤110将关断所有的服务标志,及步骤111将EMS请求复位到结束运行。在该简单的实施例中,如果控制不是在第34周期,将不启动运行的结束,因为该实施例使用了非常简单的程序来保证在系统关断前所有乘客离开车厢。本发明可用在更复杂的系统实施,该系统能识别与周期34等同任何控制及它与吊车位置的关系。例如,在周期2中,车厢E与周期34中车厢C具有相同的位置与状态。因此,如果在该实施例中,在该周期结束时,车厢E的所有动作跟随如同对于车厢C的相同程序作出了时,则可以在该第二周期启动运行结束,并对于所有相它车厢是类似的。如果不是控制周期34或者如果EMS没有请求运行结束,则步骤109-111被旁路。
在步骤112上确定是否实际上已经结束并在现在关机。如果为否,则执行一系列子程序以控制上述对于图1-51的过程。吊车控制子程序113控制上、下电梯吊车的方向及运行并在适当的时候将它们锁于楼房中。一系列的子程序114-118,一是用于控制车厢门(因而也用于井道门)的开及闭,及用于当操作结束时发出警报声。转移控制子程序119控制车厢从右转移到左侧及从左转移到右侧,其方式如以上相对图1-42所述。所有子程序113-119能极快速地执行,虽然每个任务不是在单个子程序执行中完成的。概念上,子程序以首先吊车控制、其次车厢控制、最后转移控制的次序操作;但是真正的子程序执行次序是不限的,因为它们完全与检验相关联。每当运行被关断时,检验步骤112的肯定结果引起所有子程序113-119被旁路。如果需要时,可在子程序113-119的任两个之间执行另外的程序,并假如每个在开始时具有类似于检验步骤112的步骤,以便当运行关断时旁路它。所有这些是本技术领域的熟练技术人员所熟悉的并与本发明无关。
在所有子程序113-118的说明中,首先,假定,首先进入的是常规操作而不是常规操作的起动或结束。吊车控制子程序通过图54中的进入点125达到第一检验步骤126并确定是否已置入起动标志(图53步骤102)。在假定常规操作的情况下,它没有被置入,故检验步骤126的否定结果导入到检验步骤127,以确定结束标志(图53步骤109)是否被置入。在此假设下它未被置入,故检验步骤127的否定结果导入到步骤128,以确定是否上、下电梯是否已能够运行。正如下文所述,在偶次控制周期的第一部分期间,电梯还不能运行,在检验步骤128的否定回答将导入到检验步骤129以观察对于下电梯是否已确定了方向。起初,它并没有,故检验步骤129的否定结果导入到检验步骤130以观察是否有一个车厢在下电梯中。如果没有,则意味着该车厢被转移并未一直置于该电梯中。因此,步骤130的否定结果引起另外的程序被旁路而进入返回点133。在随后通过图54的子程序时,可能有一个车厢被锁置在下吊车中,如在共享的同日提交的待审查美国专利申请系列号No.…(律师记录号No.OT-2284)中那样,联锁开关信号将指示车厢在下吊车中。然后,检验步骤130的肯定结果将导入到检验步骤134,以确定是否控制已置到任何最低两序号位为“10”的序号上。这将是对于控制周期2,6,10,14等所发生的。参照与指示这些周期时间相同序号的图,下吊车位于地面层次并且它的方向一定设为向上,以致它能向前进入中间层次。因而,检验步骤134的肯定结果导入到检验步骤135以证实下吊车的位置(由公知的原边位置传感器或类似装置确定)指示下吊车处于地面层次。如果不是这样,这意味着某些情况有错:或是控制失去同步,或是下吊车的位置传感器被损坏,或是因某原因使吊车处于错误位置。在任何情况下,检验步骤135的否定结果导入到步骤136以置入一个错误(在该实施例中指定为“错误2”),并跨过另外的程序进入到返回点133。如果假定错误2的置定将引起另外情况发生以致当错误被清除时图54的子程序才能被进入。另一方面,如果下吊车处于地面层次,检验步骤135的肯定结果,将导入到步骤138以将下吊车的方向设置成等于“向上”。
如果检验步骤134为否定,则检验步骤142确定是否控制被置为其最低两个序号位是“00”的序号上。如果不是,则系统不处于电梯吊车方向待被设置的控制周期中。因此,检验步骤142的否定结果导致另外的程序被跨过而进入到返回点133。另一方面,如果控制被置成具有最低序号位“00”的序号上,检验步骤142的肯定结果将导入到检验步骤143以观察下吊车是否处于中间层次,它将处于第4、第8第12(余类推)周期的开始,如在图4、8、12等中所示的。如果不是,检验步骤143的否定结果将导入到步骤136,以设置错误。但是如果下吊车处于中间层次,则它的下一运行将是向下,因此检验步骤143的肯定结果导入到步骤144,以设置下吊车方向为向下。
一旦下吊车的方向被置定,则进入检验步骤142以观察是否已对上吊车设定方向。如果没有,则检验步骤142的否定结果导入到一系列的步骤及检验,它们与用于下吊车的步骤及检验130-144相等同,故不再需要对其说明。在通过图54的某些下面的子程序时,利用在适当周期中的控制,将对上吊车及下吊车两者确定了方向,故在检验步骤129及146上的肯定结果导入到步骤147,在该步骤上设置“运行”标志。这引起了上吊车及下吊车的运运控制并由此使吊车开始在由图54子程序建立的方向上运行。一旦设置了“运行”标志,每个吊车将在吊车移动控制器的指令下在适合的方向上开始运动。
如果这里LO及HI吊车是穿梭式电梯同步机组的一部分,正始在共同享有的与此同时提交的待审查美国专利申请系列号No.…(律师记录号No.OT-2293)中所述的,“运行”的设置可以与一个组控制器同步,如图52中所示。在其中,不是设置“运行”标志,在步骤147a上设置“吊车1运行就绪”标志,然后群控制器可作为“吊车1启动运行”标志返回,当适当时间达到时,检验步骤147b对其响应,置“运行”标志及清除“吊车1运行就绪”标志及“吊车1启动运行”标志。
当吊车接近运行结束时,它将到达一定区域,通常称为门外及门内区域,在此情况下它称为层面区域。一旦在步骤147中设置了运行标志,就在以下经过的图54的子程序中得到检测步骤126及127为否定及检测步骤128为肯定。这将导入到测试步骤148以确定是否下吊车到达其层面区域(等同于门外区域)。起初,当吊车正在运行,将不会在层面区域,故检验步骤148的否定结果导入到检验步骤149以观察上吊车是否已到达其层面区域。起初不是该情况,步骤149的否定结果将引起另外程序的旁路及进入返回点133。图54的每个后继通过的子程序将是类似的,直到最后一个或另一吊车到达层面区域。如果下吊车达到其层面区域,检验步骤148的肯定结果导入到检验步骤150以观察是否次边位置传感器(SPT)指示下吊车与它应登入的层面齐平。这与普通电梯登层时发生的找层面的情况相等同。如果不是与该层面齐平,将进入用于下吊车的常规再对齐层面子程序151,以便在下电梯当前登层时为它对齐层面。但是如果SPT指示下吊车是与它要登入的层面对齐,则子程序151被旁路。类似地,如果检验步骤149指示上吊车位于它的层面区域内,则检验步骤152确定该吊车是否对齐层面。如果它不是,则通过子程序153再对齐层面;否则该子程153被旁路。如果检验步骤152指示上吊车已对齐层面,则检验步骤158确定下吊车是否也对齐层面(注意,无需下吊车对齐层面,也可到达检验步骤149)。如果两个吊车均对齐层面,检验步骤158的肯定结果导入到一对检验步骤159,160,以确定两个吊车是否已全部停止。如果它们是这样,检验步骤159及160的肯定结果导入到一系列步骤:步骤161及162清除用于两个电梯的电梯制动指令,使制动器落下;步骤163及164使下吊车及上吊车被锁止在楼层上,以便当车厢进入或出吊车时没有钢丝绳应力的变化;步骤165及166清除上电梯及下电梯两者的方向;步骤167清除“运行”标志,及检验步骤168设置“转移”标志,指示现在车厢可以从吊车转移到层面上,从层面转移到吊车上及在两吊车之间转移。一旦步骤161-168已被执行,就指示车厢已在吊车上层面间被输送及对转移准备就绪。
至今对图54的说明是在常规操作期间。如果开始标志被设置,检验步骤126的肯定结果导入到检验步骤131以确定是否控制被设置为35。起初将是这样,因为由步骤104(图53)将控制设为35以便起动操作。因此,检验步骤127的肯定结果将导入到检验步骤137以确定是否已启动了延时。这是这样一个时间周期,该时间周期将允许在使控制前进及关闭车厢C和E的门(图48)前使乘客有足够时间进入车厢C及E(图47)。通常,在该时间周期的期间门将打开,此后电梯吊车将作往返运行,从一个层面离开及再回到该层面。因为在起动期间没有吊车运动,故设置乘客进入延时。起初,延时将未被启动,因此检验步骤137的否定结果导入到步骤139以启动乘客定时器并在步骤141上设置“延时启动标志,以使得在随后再通过图54的程序时将得到检验步骤137的肯定结果。一旦该定时器被启动及标志被设置,将旁路另外的程序步骤进入到返回点133。
在随后通过图53的吊车/车厢控制程序时,检验步骤101将为否定,检验步骤107将为否定,检验步骤112也再次为否定,则导入到图54的吊车控制子程序113。在该过程中,检验步骤126,131及137将为否定,进入到检测步骤145以确定是否乘客定时器已期满。起初,它将未期满,因此另外的程序步骤被旁路进入到返回点133。这将继续地多次通过图54的子程序,直到最后一个适当的时间间隔(15秒数量级)过去为止,以使得所有想进入的乘客可能都进入车厢C及E。当此发生时,检验步骤145的肯定结果导入到步骤169,它使控制器递增,由此向前到达控制周期36。参照图48,这将引起车厢C及E的门被关上及车厢D的门打开。在下一次通过图54的子程序时,检验步骤126为肯定,而现在检验步骤131为否定,则进入到检验步骤154以确定控制是否在36上;它将是如此,因此步骤154的肯定结果将导入到步骤169,在这里控制器再次递增,因为在控制周期36中无吊车功能被执行。然后,另外的程序部分被旁路进入到返回点133。
在下次通过吊车控制子程序113时,检验步骤126为肯定,检验步骤131及154为否定,及检验步骤127为否定。然后,操作如前所述。这就是开始控制置于37(如图49中所示),吊车控制子程序113将与作为常规操作开始期间相同地操作。
现在假定不是设置了开始标志,而是设置了结束标志。检验步骤126的否定结果及检验步骤127的肯定结果将导入到一系列检验步骤170-173以观察控制是否设置在38与0之间的任一周期上。因为“结束”标志设置在控制周期34处,开始几次通过子程序113将会得到所有检验步骤170-173的否定结果,因此吊车控制子程序113的操作将与常规操作期间相同。有可能到达控制周期38,因此检验步骤170的肯定结果导入到检验步骤137以确定是否乘客延时已被启动。起初未延时启动,因此步骤139及141启动定时器及设置“已启动延时”标志。然后旁路另外程序步骤,进入返回点133,设有在步骤169上使控制周期递增。这使得程序重复地经过步骤38的肯定结果,直到检验步骤145的肯定结果指示乘客定时时间(使乘客从车厢A和B中出来所需时间,见图44)已过为止。然后,检验步骤145的肯定结果导入到步骤169,以使控制周期从38递增到39。
当控制周期等于37时,检验步骤127的肯定结果及检验步骤170的否定结果将导入到检验步骤71,该步骤将为肯定,只是引起另外程序部分被旁路以进入到返回点133,因为当操作结束时没有吊车的运动或另外的在控制周期37期间所需的吊车功能。接着,控制周期将在如上所述的转移子程序中递增;在控制周期设在38上后第一次通过吊车控制子程序时,检验步骤170及178的肯定结果将产生乘客延时的建立,以取代电梯的运行时间使乘客有时间能从车厢A和B中出来,因为在常规操作结束期间电梯在控制周期39中不运行。起初,检验步骤137为否定,进入步骤139及141,以启动乘客延时定时器及设置标志。因为在该子程序中控制周期从偶数递增到奇数,所有随后通过检验步骤170及171都将导入到检验步骤137,它为肯定,则在检验步骤145上等待延时到期。在延时到期以前,检验步骤145的否定结果将总是单使得另外的程序部分被旁路以进入到返回点133,而没有在步骤169上递增控制周期。一旦乘客定时器到期,检验步骤145的肯定结果进入到步骤169,以使控制周期递增到39。在下一次经过吊车控制子程序113时,检测步骤172的肯定结果只引起另外程序部分被旁路并进行到返回点133,因为当操作结束时在第39控制周期期间不执行吊车控制功能。有可能是,转移子程序将使控制周期从39向前到0,并且检验步骤173的肯定结果将单使图中子程序113的其余部分被旁路以进入到返回点133。如上所述,当操作结束时在第一次通过控制转移子程序119时所有操作将停止,及控制在零周期上。
参照图55,通过进入点174进入用于车厢A的车厢控制子程序114并在一对检验步骤175,176上确定车厢是否在层面上并锁止在层上(以上述的方式或不以上述方式)。在这里,锁止在层上是以不同的方式发生在右登层区而非在左登层区。在该实施中,使用了两个不同的锁止位置,一个用于右侧而另一不同者用于左侧,因此,联锁或确保了吊车的锁止对于右侧是不同于左侧的识别。这种联锁不过是一种微动开关,它仅在适合的右或左侧位置上响应完全锁上时才闭合。如果吊车不是锁在右或左侧登层面上,检验步骤175,176两者的结果将是负的,并进入到返回点177,因此当尤其通过图55的子程序期间在车厢A中没有门开或闭或启动警报。另一方面,如果车厢A被锁止在左登层区,检验步骤175的肯定结果将导入到检验步骤180以确定是否已设置结束标志。在常规操作期间,将没有设置该结束标记,故检验步骤180的否定结果导入到一系列的检验步骤181-186,以确定是否在需要右门打开的任何周期上,如从图6,32及38中看到的,或在需要左门打开的任何周期上,如从图8,34及40中看到的,已设置了控制。如果检验步骤181-183中的任一个为肯定,步骤187将引起车厢A的左门打开指令。另一方面,如果检验步骤184-186中任一个为肯定,步骤188将引起车厢A的左门关闭指令。以类似的方式,如果车厢A被锁在右登层区,则一系列的检验步骤191-193将确定是否在步骤197上需要右门打开指令的周期上已设置了控制,及一系列的检验步骤194-196将确定是否在步骤198上需要右门关闭的指令。例如,参照图12及14,它们表示车厢A的右门在控制12时打开及在控制14上关闭。
如在图44中看到的,如果已经对常规操作给出了结束指令并设置了结束标志,在控制周期38上车厢A的左门被打开以便让人进入。为了在此时阻止别人进入车厢,必须使警报发声并可能地降低灯光强度等,以阻止别的乘客进入车厢。指示离开左登层区的车厢目的地的运行信号在图53中步骤110上的控制周期34上已被关断。在图55中,因此检验步骤180的肯定结果将导入到一对步骤201,202,它们使得在控制周期38中由步骤203接通警报,及在控制周期0中由步骤204关断警报(图46)。
用于车厢B的车厢控制子程序115与用于车厢A的相同,所不同的是在与检验步骤181-186等同的检验步骤上所检验的控制周期分别为24,30,38,26,32及0。这可从参照相同序号的附图看到:在图24,30及38中车厢B左门打开及在图26,32及40中它关闭。类似地,在与检验步骤191-196等同的检验步骤中检验的控制序号是4,10,18,6,12及20,因为可以看到,在图4,10及18中车厢B的右门被打开及在图6,12及20中它被关闭。
参照图56,用于车厢C的车厢控制程序是和用于车厢A的该程序相同的,不同的是用于左门的等同控制序号为0,6,14,2,8及16,而用于右门的等同控制序号为20,26,34,22,28及36;及在控制周期34中当常规操作结束期间接通警报,和在控制周期37中关断警报。用于车厢E的车厢控制子程序118与用于车厢C的该程序相同,不同处在于左门控制序号为8,14,22,10,16及24;及右门控制序号为2,28,34,4,30及36。警报的控制相同。
用于车厢D的车厢控制子程序程序17(如图57所示)与图56中所示的用于车厢C的车厢控制子程序相同,不同之处在于所涉及的控制序号。左门控制序号为16,22,30,18,24及32;右门的控制序号为2,10,36,4,12及38。在控制序号36时警报接通,而在控制序号39时警报关断,因为如从图42及42所见,在控制序号36时,车厢D的右门打开以便让乘客出来,而在控制序号38时该门关闭。
如图58所示,转移控制子程序119通过进入点207来导入。第一检验步骤208确定是否已在图54的步骤168上设置了转移标志。如果没有,则作为通过子程序119结果任何车厢不发生水平运动。检验步骤208的否定结果导入到检验步骤209以确定是否以确立常规操作的结束;在不是该情况的常规操作时,则检验步骤209的否定结果引起另外程序步骤的旁路并进入到返回点210。另一方面,如果已设置了转移标志,检验步骤208的肯定结果导入到一系列检验步骤211以确定是否在所有的车厢A-E上右门及左门全都关闭。如果有任何门开着,相应检验步骤211的否定结果将引起另外步骤的旁路并进入到返回点210。在常规情况下,所有的门均关闭,因此所有检测步骤211的肯定结果将导入到检验步骤212,以确定控制是否被设在奇数周期。通常将是该情况,因为除去起动及结束期间,控制紧跟着在步骤168上的转移标志的设置在图54的步骤169上从偶数递增到奇数。如果在偶数周期期间出现了转移标志,这意味着某些事已出错及检验步骤212的否定结果导入到步骤213,则在这里将错误设置成错误4。在常规情况下,检验步骤212的肯定结果导入到一对步骤213,214,以便使在上及下吊车中的两车厢解锁并准备从这些吊车出来的水平运动(见图41)。检验步骤218确定控制是否被设置在以“001”结束的序号上,该序号代表相应于图1,9,17,25及33的控制序号,其中上吊车及下吊车均有车厢从左向右移动:这就是在吊车上的车厢移动到右登层区及在左登层区上的车厢移动到吊车中。在检验步骤219上如果是肯定的,则一对步骤220,221使在高空左登层区及地面左登层区中的车厢解锁(例如为图8中的车厢A及C),然后步骤222指令向右侧转移,它是用在以下相对图59所述的方式实现的。然后检验步骤223确定是否车厢已完全移入到右高空登层区(例如图9中车厢B)。如果是的话,由步骤224使该车厢锁在该登层区上。如果在等待该车厢完全进入右高空登层区,步骤223的否定结果将引起另外步骤的旁路并进入到返回点210。一旦车厢被锁在右高空登层区,检验步骤224确定是否一个车厢完全位于右地面登层区上。在此时,通常是检验步骤224的肯定结果导入到步骤225,这时将通过步骤226使车厢锁在右地面登层区(例如图9中车厢D)。
如果检验步骤219为否定,则检验步骤230确定控制是否设置在“011”为结束的序号上。如果是,这代表等同于图3,11,19,27及35中的控制序号,其中中间车厢移动到右侧。这使得不涉及中间层次的一系列步骤及测试步骤231-234等同于步骤及测试步骤221-224。
如果检验步骤230为否定,则检验步骤235确定控制是否设置在以“101”结束的序号上。如果是,这涉及到与图5,13,21,29及37等同的控制序号,其中高空层及地面层的车厢均移动到左侧。检验步骤235的肯定结果导入到检验步骤236,以确定是否已设置结束标志。在一般情况下,将不是这样,故检验步骤236的否定结果进入到一系列的步骤及检验步骤240-246,它们分别等同于步骤220-226,所不同的是它们涉及转移到左侧。在常规操作的结束期间,如图43中看到的,车厢A及B被移到左侧,而车厢E及C留下未动。为了达到这个,在步骤236为肯定的情况下旁路步骤240及241,及步骤247指示控制序号被设置在37上(图43中所示)。因而,当转移发生时,车厢C及E保留在右登层区而不是移动到左侧,如以下相对图59所述的。
如果检测步骤235为否定,因为检测步骤212指示控制被设置在奇序号上,该唯一剩余的奇数序号是以“111”结尾的控制序号,它等同于控制序号(因而为图号)7,15,23,31及39,其中在中间层次上的车厢被移到左侧。检验步骤235的否定结果导入到一对检验步骤249,250以确定是否控制序号设置为39及设置了结束标志。如果不是,检验步骤249或250的否定结果将导入到一系列的步骤及检验步骤251-254,它们相应于步骤221-224,所不同的是它们涉及在中间层次被移到左侧的车厢。如比较图45和图39所看到的,在结束操作的控制周期39期间,没有车厢被移到左侧。因此,检验步骤249及250两者的肯定结果旁路了所有步骤及检验步骤251-254,并导入到步骤257,该步骤将控制序号设置为0,及进入步骤258,该步骤清除转移标志,因为这时已完成转移操作。
每当在步骤226,234,246或254上已完成转移操作时,图58的转移控制子程序将进行到检验步骤259,以观察是否控制序号设在39上。在通常的情况下,不是这样,故检验步骤259的否定结果导入到步骤260以使控制增加到下一较高的序号。因为转移控制子程序119在奇数周期期间运行,步骤260上的递增使控制呈现偶序号。另一方面,当检验步骤259为肯定时,则控制序号不是递增,而是复位到零,以便重复图1-40所示的功能。并且,每次达到检验步骤259时,将达到步骤258,以清除转移标志。此后,另外的程序步骤被旁路并进入到返回点210。
在任一通过转移控制子程序119时,每当转移标志未设置,或门打开时,或控制未设置在奇数序号上,任一检验步骤208,211或212的否定结果将导入到检验步骤209以确定是否在结束常规操作的程序中已设置了结束标志。如果设置了结束标志,则检验步骤209的肯定结果导入到检验步骤259,以观察控制序号是否达到零。这将在通过紧跟其中检验步骤235及249的肯定结果引起步骤257将控制序号设成零的子程序时发生。检验步骤209及259的肯定结果将导入到步骤206,以清除结束标志,及导入到步骤261,以设置服务标志关断,以使得随后通过图53的吊车车厢控制程序时由于检验步骤112的肯定结果使子程序113-119旁路。
如相对图41所描述的,车厢同时地从层面移动到吊车架,从吊车架到吊车架,及从吊车架到层面。用于在吊车之间转移车厢的优选方式被公开在共享的、同时申请的美国专利申请系列号…(律师记录号OT-2320)中,如相对图59简要描述的那样。在图59中,车厢A的底部是有一个固定的、从前方延伸到后方(图59中从右向左)的主齿条350,及一个辅助滑动齿条353,后者能向外滑到右侧,如图中所示,或滑动到左侧。在吊车架平台72的每个上一共具有四个电机驱动的小齿轮。首先,一个电机驱动的辅助小齿轮355正时针地转动以使滑动辅助齿条353从车箱下方位置驱动到图示位置,这时它可与平台72上的电动驱动辅助小齿轮365相啮合,后者是齿条353能滑动到的极限。然后,电机驱动的小齿轮356将拉动辅助齿条353(它现在延伸在其极限上)并由此使整个车厢A向右侧移动,如图59中所示,直到主齿条350的一端357与位于图59电机驱动辅助小齿轮356正向方的电机驱动主小齿轮(未示出)相啮合为止。然后,该电机驱动主小齿轮将借助主齿条350拉动整个车厢A完全进入HI电梯的吊车架72,并当作到这个时,一个弹簧使滑动辅助齿条353收缩到车厢A的下方。电机驱动辅助小齿轮359在将车厢A向右移到另一吊车架或层面(如果有的话)时起辅助作用。类似地,辅助小齿轮360在将车厢从吊车架或层面向其左侧移动时起辅助作用(如果有的话)。
为了使车厢A从HI电梯的吊车架72返回到LO电梯的吊车架72,辅助小齿轮356将反时针转动,以使滑动辅助齿条353向外移到左侧,直到其左端361与辅助小齿轮355齿合为止。然后,辅助小齿轮355拉动辅助齿条353,并使整个车厢A拉向左侧,直到主齿条的左端362与位于辅助小齿轮355正后方的电机驱动主小齿轮(未示出)相啮合为止,后者使整个车厢拉向左侧,直到它完全到达LO电梯的吊车架72上为止。
如以上所描述的,根据图1-40的本发明操作每八个控制周期将使车厢离开每个层面一次,每次使上及下电梯吊车运行四次。因为每次登层总是到达一个专门目的地行程的开始,一个车厢开始每次行程,对于每八个控制周期运行一次(例如一个乘客可能在图8的车厢C中、在图16的车厢E中、在图24的车厢D中及在图32的车厢B中离开地面层)。本发明的第二实施例在控制的第四个周期上提供乘客到达任何目的地一次,其中使用双层电梯,它的上及下层不是以相同的定时移动,而是上层的车厢的定时滞后于下层的相应吊车四个控制周期。这表示在图60-65上,其中车厢V,W,X,Y及Z被看作分别等同于车厢A,B,C,D及E。在括号中的图号指出图号1-40中的一个,它们分别表示一组或另一组车厢的状态。例如在图60中,车厢A-E处于与它们在图1中相同的位置上,但是车厢V-Z处于与车厢A-E在图37中相同的位置上。另一方面,在图64中,车厢V-Z现在精确地处于与图1中车厢A-E相同的位置上。换言之,第二组车厢V-Z将在任何控制周期中将作四个控制周期前第一组车厢A-E所作的操作。因此,乘客可在下层的车厢A中在控制周期0期间门关着地离开地面层次驰向高空层次(如图40所示),也可在以后在控制周期4期间上层的车厢V中门关着地离开地面层次驰向高空层次。然后,乘客可在控制周期8期间在下层车厢C中门关着地离开地面层次驶向高空层次(见图8),并接着可在控制周期12期间在上层车厢X中门关着地离开地面层次驶向高空层次,并依此类推。在此实施例中,一个层次可包括两个楼层,或仅包括在相应楼层的不同高度上具有上、下阶层的单楼层;或双楼层。
用于本发明的典型定时可包括;使车厢向左侧转移的四秒钟,使车厢向右侧转移的四秒钟,每层1/2秒,因此如果中间层次处于第80楼层,高空层次处于第160楼层,则对于每个上、下电梯从一个层次到另一层次的运行时间将是40秒的量级,故得到从一层次到相邻的另一层次的全部运行时间为48秒。从任一层次到非相邻的层次的全部运行时间中需要三次转移,因此将为92秒的量级。对于单个电梯的运行时间将是两倍长,即为160秒量级,因此还必须加上的服务时间是开门、允许乘客走出并再允许乘客进入,这对于大型电梯每次登层需要12秒,总加起来超过三分钟(检查人数及移动到前端)。
如前面相对图51所描述的,每个车厢遵循重复的、单一的运行模式,及每个车厢跟随通过该路径的相同车厢,并被通过该路径的另一相同车厢所跟随,并无限地重复下去。具体的路径将是与系统起动时车厢如何布置的后果。参见图1,如果车厢C是在右中间层面上而非在左中间层面上,其结果将是图51中箭头的方向全部反转。如果车厢D及E也是分别从右高空层面及右地面层面移到左高空层面及左地面层面,其结果将是,从地面到高空的箭头和从高空到地面的箭头相交叉,这就是从地面左层面到高空右层面及从高空左层面到地面右层面的运行。类似地,在在吊车的相对位置上可作出许多另外的变型已得到另外的模式。然而在每种情况中,一旦模式被建立,任何给定层面就专用于到达任何特定的其它给定层面的进入点,这是不变的,并且每个车厢跟随相同的车厢并被相同车厢跟随地通过不变的重复运行模式。
至此本发明的实施例在对所有层次提供同样服务方面是统一的,也就是,到任何特定层次运行的开始基于电梯的每个另外循行的周期。这就是说,从中间层次左层面到地面层次左层面的运行开始于图2-使用车厢C,而下次运行开始于图10-使用车厢E。类似地,每另一运行重复地开始,每一次对应电梯的每两次循行。但是,本发明的第二实施例(简要地表示在图60-65中)将提供两倍的服务,每次电梯循行具有离开任何层次到达任何另外层次的服务。该实施例使用了双层电梯吊车在每个层次上具有双层登层面,其方式为至此对于图1-59所述的实施例及兼容了公知的双层电梯。为了获得重复每次电梯循行一次的服务,所需的是上层系统相对控制周期的特定同步偏离下层系统的控制周期的同步四个控制周期。因此,图60-65表示下层系统正好与以上图1-6相同。另一方面,图64中的上层系统具有与图1相同的状态。这就是说,如果车厢V、W、X、Y及Z分别与A,B,C,D及E相对应,则图64中的上层系统与图60中的下层系统具有相同状态。这两个系统就可以使它们的控制序号简单地偏置4进行相同的控制操作,如图60-65中所表明的。
图60-65也表明,当上层与下层具有完全相同的模式但偏离四个控制周期时,在每种情况下在每层次上转移发生在相反方向上。但是,也可使用另外的模式组合,来获得上层及下层之间的另外特性及不同关系。
图60-65中所示的实施例在两层中具有相同的专用服务登层区。这就是,从地面层次到上层次的运行在上、下层中均开始于左地面登层区;从地面层次到中间层次的运行开始于上、下层的地面右登层区;余依次类推。这就简化了乘客根据他们的目的地朝正确层面的聚集和引导。
以上的实施例用于三个层次。图66及67表示本发明的另一实施例,其中可用于四个层次。图66中所示的模式前进到下一控制周期到达图67a中所示的状态。对于电梯的每次循行,该状态将提供:第一及第四层次之间的两次服务;第二及第三层次之间的一次服务;第三及第一层次之间的两次服务及第四及第二层次之间的二次服务。图67b表示的状态是图67a中状态的倒置。对于电梯的每次循行,该状态将提供:第一及第三层次之间的两次服务;第二及第四层次之间的两次服务;第三及第二层次之间的一次服务;和第四及第一层次之间的两次服务。图67a及图67b中所示两个系统的组合将对于所有八个电梯每次循行将提供如下的组合服务:层次一到层次三,两次;层次一到层次四,两次;层次二到层次三,一次;层次二到层次四,两次;层次三到层次一,一次;层次四到层次一,两次;层次四到层次二,两次。因此,通过附加图67中的示图a及b的平衡组,示图C中所示的5个单层次组,可获得对于电梯的每次循行到达任何目的地的两个运行开始点,示图C中的5个单层次组将提供在层次二及三之间每个方向上的一次附加单运行及层次一及二之间、层次三及四之间每个方向上的两二附加运行。因此图67的系统对于电梯的每次循行提供了起始于任何层次的一次运行。当然,图56或57的实施例可以与时间偏置的双层电梯相结合以便对于电梯的每次起动提供多个运行起始点。
本发明可结合另外的电梯、层次数及车厢数的组合使用。在这里的实施例中,车厢数目等于层次数目与电梯吊车数目的和,因为在所有偶数控制周期(图1-40的实施例)中,在每个电梯中有一个车厢及在每层次上留有一个车厢。
所有以上引证的专利申请被结合于此作为参考。
因此,虽然本发明是对于其示范实施例进行图解及说明的,但对于本领域的熟练技术人员,应该理解在不偏离本发明的精神及范围的情况下,可以在其中或对其作出以上的或其它的各种变型,省略及添加。
Claims (21)
1 一种使第一电梯车厢从楼房的第一层通过所述楼房的第二层到所述楼房的第三层的方法,包括以下步骤:
(a)使所述第一电梯车厢沿所述楼房的第一电梯井道从所述第一层到所述第二层;
(b)在所述第二层上,使所述第一车厢移动到所述楼房中的第二井道;及
(c)使所述第一车厢沿所述第二井道从所述第二层到所述第三层;
其特征在于,其中的改进为步骤(b)包括:
(d)在所述第二层上,所述第一车厢移动到所述第二井道与第二车厢从所述第二层的第一登层区移动到所述第一进道同时地进行,并且同时地使第三车厢在与所述第一登层区相反方向上从所述第二井道移动到所述第二层的第二登层区。
2 根据权利要求1所述的方法,还包括:
(e)在所述步骤(a)以前,使所述第一车厢从所述第一层的第三登层区移动到所述第一井道。
3 根据权利要求2所述的方法,还包括:
(f)在所述步骤(f)以后,使所述车厢从所述第二井道移动到所述第三层的第四登层区。
4 根据权利要求3所述的方法,其中所述车厢是一个乘客梯厢并还包括:
在所述步骤(a)以前,允许乘客从所述第一层转移到所述第三登层区中的所述车厢中;及
在所述步骤(C)以后,允许乘客从所述第四登层区的所述车厢转移到所述第三层。
5 根据权利要求1所述的方法,还包括:
(g)在所述步骤(c)以后,将所述车厢从所述第二井道移到所述第三层的另一登层区。
6 在楼房的两个乘客厅层之间移动乘客的方法,包括:
设置了多个电梯,每个具有在一个井道的两个终端层次之间移动的电梯吊车,一个所述电梯的所述终端层次的下层次是一个下乘客厅层,及所述电梯的所述终端层次的上层次是一个上乘客厅层,除所述上及下乘客厅层外的所述所有电梯的终端层次与所述另一电梯的终端层次一起处于所述楼房的转移层次上,及设有多个车厢,它们可在所述登层区及所述吊车之间移动;
使乘客从所述下厅层进入到在相应一个所述下终端层次上的第一登层区的车厢中;
使所述车厢从所述第一登层区移到第一所述吊车;
然后使所述第一吊车移动到它的另一终端层次;
接着使所述车厢从所述第一吊车移到所述另一吊车;
然后使所述第二吊车上的所述车厢移到所述上终端层次;
接着使所述车厢移到所述另一厅层的第二登层区;及
使乘客在所述另一厅层上从所述车厢中出来。
7 用于具有多个层次的楼房的电梯系统,它包括:
多个交叠的电梯井道,每个具有一个可从相应井道的下端移动到相应井道的上端的电梯吊车,所述系统中每个井道除所述最低井道外其下端与所述另一井道的上端处在相同的中间楼层次上,所述系统中每个井道除所述最高井道外其上端与所述另一井道的下端处在相同的中间楼层次上;
多个电楼车厢;及
与使另一所述车厢从所述一个电梯吊车架转移到所述一个及另一井道的所述同一中间层层次的登层区的同时使所述电梯车厢从所述另一井道的所述另一电梯吊车架转移到所述一个井道的所述一个电梯吊车架上的装置。
8 根据权利要求7所述的电梯系统,其中:所述用于转移的装置使所述车厢与所述另一电梯车厢从所述同一中间楼层次上的另一登层区转移到所述另一电梯吊车架同时地转移。
9 一种同步穿梭电梯,包括:
一个楼房,具有三个互相分隔的层次,在每层次上的井道对立侧上具有两个乘客登层区;
一对电梯各具有在相应井道中垂直移动的吊车,每个井道延伸在两个所述层次之间,每个井道在两个井道延伸的中间一个所述层次上与另一井道相邻接;
五个电梯车厢,每个可在一个所述电梯吊车与另一所述电梯吊车之间移动,及每个可在所述电梯吊车及所述登层区之间移动;及
用于交替地作下列移动的装置:
使所述一个车厢在第一水平方向上从第一所述吊车移到第一所述登层区,并同时地使另一所述车厢在所述第一水平方向上从第二所述吊车移到所述第一吊车中,以及同时地使另一所述车厢在所述第一水平方向上从第二所述登层区移到所述第二吊车上;或
使所述一个车厢在第二水平方向上从所述第一登层区移到所述第一吊车,并同时地使另一所述车厢在所述第二水平方向上从所述第一吊车移到所述第二吊车中,以及同时地使另一所述车厢在所述第二水平方向上从所述第二吊车移到所述第二登层区上;或
将所述一个车厢在一个所述水平方向上从所述第一吊车移到所述第三登层区,并同时地使所述另一车厢在所述一个水平方向上从第四所述登层区移到所述第一吊车,及将一个所述车厢在任一所述水平方向上从所述第二吊车移到第五所述登层区,并同时地使另一所述车厢在所述任一方向上从第六所述登层区移到所述第二吊车。
10 根据权利要求9所述的同步穿梭电梯,其中:
所述吊车为双层吊车,每个吊车将一个车厢保持在另一车厢上方;
所述楼房包括相对于每个所述楼层次的两个上层登层区及两个下层登层区,每个上层登层区位于相应下层登层区的上方;
所述穿梭电梯包括十个车厢;及
用于交替地作下列移动的装置;
使第一所述车厢在第一水平方向上从第一所述吊车的下层移到所述第一下层登层区,并同时使第二所述车厢在所述第一水平方向上从第二所述吊车的下层移到所述第一吊车的下层,并同时地使第三所述车厢在所述第一水平方向上从第二所述下层登层区移到所述第二吊车的下层,并同时地使第四所述车厢在第二水平方向上从所述第一登层区上方的一个所述上层登层区移到所述第一吊车的上层,并同时地使第五所述车厢在所述第二水平方向上从所述第一吊车的上层移到所述第二吊车的下层,并同时地使第六所述车厢在所述第二水平方向上从所述第二吊车的上层移到所述第二登层区上方的所述上层登层区;或
使第一所述车厢在所述第二水平方向上从所述第一下层登层区移到所述第一吊车的下层,并同时使第二所述车厢在所述第二水平方向上从所述第一吊车的下层移到所述第二吊车的下层,并同时使第三所述车厢在所述第二水平方向上从所述第二吊车移到所述第二下层登层区,并同时使第四所述车厢在所述第一水平方向上从所述第一吊车的上层移到所述第一登层区上方的所述上层登层区,并同时使第五所述车厢在所述第一水平方向上从所述第二吊车的上层移到所述第一吊车的上层,并同时使第六所述车厢在所述第一水平方向上从所述第二登层区的所述上层登层区移到所述第二吊车的上层;或
使第一所述车厢在一个所述水平方向上从所述第一吊车的下层移到第三所述下层登层区,并同时使第二所述车厢在所述一个水平方向上从第四所述下层登层区移到所述第一吊车的下层,并同时使第三所述车厢在另一所述水平方向上从所述第三登层区上方的一个上层登层区移到所述第一吊车的上层,并同时使第四所述车厢在所述另一水平方向上从所述第一吊车的上层移到所述第四登层区上方的一个所述上层登层区,并使第五所述车厢在任一所述水平方向上从所述第二吊车的下层移到第五所述登层区的下层,并同时使第六所述车厢在所述任一方向上从第六所述登层区的下层移到所述第二吊车的下层,并同时使第七所述车厢在与所述任一水平方向相反的方向上从所述第五登层区上方的所述上层登层区移到所述第二吊车的上层,并同时使第八所述车厢在所述相反方向上从所述第二吊车的上层移到所述第六登层区上方的一个所述上层登层区。
11 操作一个穿梭电梯的方法,该穿梭电梯包括多个电梯,每个电梯具在相应井道中在多个楼层次之间移动的电梯吊车架,每个井道在所述楼的转移层次上与另一井道交叠,并包括多个电梯车厢,它们可移入及移出所述吊车架,该方法包括:
(a)使乘客在电梯井道外的登层区进入电梯车厢及从其中卸载;
(b)水平一致地移动多个车厢,使车厢从所述登层区移到所述井道中的电梯吊车架,并同时使车厢从所述吊车架移到所述转移层次上的所述登层区,也同时地使车厢从一个所述吊车架转移到另一所述吊车架;及
(c)使所述吊车架在所述层次之间的所述井道中移动。
12 根据权利要求11所述的方法,其中:所述楼包括在每层次上的一对登层区,每个登层区彼此位于井道的两对立侧上。
13 根据权利要求12所述的方法,其中:每个井道在所述转移层上仅具有一个与其相邻的登层区,及所述步骤(b)包括:使第一车厢在所述转移层上从第一登层区转移到第一井道中第一吊车架上,并同时使第二车厢从所述第一吊车架转移到第二井道中第二吊车架上,并同时使第三车厢从所述第二吊车架转移到所述转移层次上的第二登层区。
14 根据权利要求12所述的方法,其中所述步骤(b)包括:使第一车厢从第一登层区转移到第一井道中第一吊车架上,并同时使第二车厢从所述第一吊车架转移到第二登层区。
15 根据要求11所述的方法,其中所述穿梭电梯包括在第一转移层次上与第三井道交叠的两个井道,及所述步骤(b)包括:使第一车厢从所述第一转移层次上的第一登层区转移到第一所述井道中的第一吊车架,同时地使第二车厢从所述第一吊车架转移到第二所述井道的第二吊车架上,并同时使第三车厢从所述第二吊车架转移到所述转移层次的第二登层区。
16 根据权利要求11所述的方法,其中所述电梯吊车架是双层架,及所述登层区包括在每层次上与所述架层相应的上、下登层区,及所述步骤(b)包括:使第一车厢从第一下登层区移动到第一井道中第一吊架架下层,并同时使第二车厢从所述第一吊车架的上层移到所述第一下登层区上方的上登层区。
17 根据权利要求11所述的方法,其中所述电梯吊车架是双层架,及所述登层区包括在每层次上与所述架层相应的上、下登层区,及所述步骤(b)包括:使第一车厢从第一下登层区移到第一井道中第一吊车架下层,并同时使第二车厢从所述第一吊车架的上层移到所述第一下登层区上方的上登层区,并同时使第三车厢从所述第一吊车架的所述下层移到第二井道中第二吊车架的下层,并同时使第四车厢从所述第二吊车架的上层转移到所述第一吊车架的上层,并同时使第五车厢从第二下登层区转移到所述第二吊车架的下层,并同时使第六车厢从所述第二下登层区上方的上登层区转移到所述第二吊车架的上层。
18 一种同步穿梭电梯,包括:
一个具有三个互相隔开的层次的楼房,在每层次上的井道对立侧上具有两个乘客登层区;
一对电梯,各具有在相应井道中垂直移动的吊车,每个井道延伸在两个所述层次之间,每井道在两井道延伸的中间一个所述层次上与另一井道相邻接;
五个电梯车厢,每个可在一个所述电梯吊车与另一所述电梯吊车之间移动,及每个可在所述电梯吊车及所述登层区之间移动;及
用于使每个所述车厢依次沿公共路径移动的装置,对于所有车厢其路径相同并在各层次之间,各吊车架之间及登层区及吊车架之间移动,每个离开具体登层区的车厢总是受限制地沿所述路径到达一个给定的相应登层区,在一个重复周期中车厢周期性的离开每个登层区。
19 根据权利要求18的同步穿梭电梯,其中:
所述吊车为双层吊车,每个吊车将一个车厢保持在另一车厢上方;
所述楼房包括相对于每个所述楼层次的两个上层登层区及两个下层登层区,每个上登层区位于相应下层登层区的上方;
所述穿梭电梯包括十个车厢;及
所述用于移动的装置包括:
用于使第一批五个所述车厢依次沿第一公共路径移动的装置,对于所有所述第一批车厢其路径相同并在各层次之间,各吊车架的下层之间,吊车架的下层及下登层区之间,和下登层区及吊车架的下层之间移动,每个离开具体下登层区的第一批车厢总是受限制地沿所述第一路径到达一个给定的相应下登层区;及用于使第二批五个所述车厢依次沿第二公共路径移动的装置,使车厢在各层次之间,各吊车架的上层及上登层区之间,及在上登层区及吊车架的上层之间移动,每个离开具体上登层区的第二批车厢总是受限制地沿所述第二路径到达一个给定的相应上登层区;在一个重复周期中具有一个周期性地离开每个下登层区的所述第一批车厢,及在所述重复周期中具有一个周期性地离开每个上登层区的所述第二批车厢。
20 根据权利要求19所述的同步穿梭电梯,其中所述第一批车厢在所述第二批车厢离开每个下登层区上方的上登层区的时间之间的中途离开下登层区。
21 根据权利要求19所述的同步穿梭电梯,其中每个单一的具体下登层区处于同一层次上一个具体上登层区的下方,在层次在所述单一具体下登层区的给定相应下层次的上方具有一个给定的相应上层次。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US08/564,534 US5651426A (en) | 1995-11-29 | 1995-11-29 | Synchronous elevator shuttle system |
| US564,534 | 1995-11-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1160011A true CN1160011A (zh) | 1997-09-24 |
Family
ID=24254864
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN96121364A Pending CN1160011A (zh) | 1995-11-29 | 1996-11-28 | 同步穿梭电梯系统 |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US5651426A (zh) |
| EP (1) | EP0781724A3 (zh) |
| JP (1) | JPH09165148A (zh) |
| KR (1) | KR970026873A (zh) |
| CN (1) | CN1160011A (zh) |
| AU (1) | AU7198296A (zh) |
| CA (1) | CA2189919A1 (zh) |
| ZA (1) | ZA969381B (zh) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106335829A (zh) * | 2016-11-10 | 2017-01-18 | 山东建筑大学 | 一种移动对接立体式连通电梯 |
| CN107285167A (zh) * | 2017-07-31 | 2017-10-24 | 山东建筑大学 | 一种可垂直和横向移动的电梯 |
| CN107922158A (zh) * | 2015-08-03 | 2018-04-17 | 奥的斯电梯公司 | 中间转运站 |
| CN110612266A (zh) * | 2017-05-11 | 2019-12-24 | 蒂森克虏伯电梯股份公司 | 具有两个井道的电梯系统 |
| CN111252647A (zh) * | 2020-03-11 | 2020-06-09 | 长沙宁湖机械设备有限公司 | 一种三厢双层停靠式电梯 |
| CN112888647A (zh) * | 2018-08-21 | 2021-06-01 | 蒂森克虏伯电梯创新与运营有限公司 | 具有第一部分电梯系统和第二部分电梯系统的电梯系统 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5861586A (en) * | 1996-06-19 | 1999-01-19 | Otis Elevator Company | Horizontal and vertical passenger transport |
| US5816368A (en) * | 1997-03-20 | 1998-10-06 | Otis Elevator Company | Elevator cars switch hoistways while traveling vertically |
| US6481535B1 (en) * | 2000-05-16 | 2002-11-19 | Otis Elevator Company | Dispatching algorithm for piston-type passenger conveying system |
| US6520295B1 (en) * | 2000-05-16 | 2003-02-18 | Otis Elevator Company | Piston-type passenger conveying system |
| CN1298605C (zh) * | 2002-07-11 | 2007-02-07 | 株式会社日立制作所 | 电梯装置 |
| CN101111443B (zh) * | 2005-02-04 | 2011-06-08 | 奥蒂斯电梯公司 | 指示一电梯轿厢在等待同一电梯井中另一电梯轿厢的通知 |
| EP1851155B1 (en) * | 2005-02-04 | 2013-12-25 | Otis Elevator Company | Calls assigned to one of two cars in a hoistway to minimze delay imposed on either car |
| JP5133352B2 (ja) * | 2006-12-22 | 2013-01-30 | オーチス エレベータ カンパニー | 単一の昇降路に複数のかごを含むエレベータ装置 |
| FI20090280A (fi) * | 2009-07-17 | 2011-01-18 | Kone Corp | Hissijärjestely ja menetelmä hissikorin liikuttamiseksi hissikuilussa |
| CN102408054B (zh) * | 2011-08-21 | 2013-09-25 | 冯静 | 多层住宅楼的多幢楼共用电梯的建筑结构及使用方法 |
| KR101760115B1 (ko) * | 2012-04-26 | 2017-07-20 | 아티큘레이티드 퍼니큘레이터 에이비 | 연결식 승강기 |
| WO2014158127A1 (en) * | 2013-03-25 | 2014-10-02 | Otis Elevator Company | Multicar self-propelled elevator system |
| DE102014201804A1 (de) * | 2014-01-31 | 2015-08-06 | Thyssenkrupp Elevator Ag | Verfahren zum Betreiben eines Aufzugsystems |
| US9758347B2 (en) | 2014-12-02 | 2017-09-12 | ThyssenKrupp Elevator AG; ThyssenKrupp AG | Arrangement and method to move at least two elevator cars independently in at least one hoistway |
| WO2016126933A1 (en) * | 2015-02-05 | 2016-08-11 | Otis Elevator Company | Vehicle and method for elevator system installation |
| US10017354B2 (en) * | 2015-07-10 | 2018-07-10 | Otis Elevator Company | Control system for multicar elevator system |
| US9598265B1 (en) * | 2015-09-28 | 2017-03-21 | Smart Lifts, Llc | Vertically and horizontally mobile elevator cabins |
| US10472206B2 (en) * | 2015-12-04 | 2019-11-12 | Otis Elevator Company | Sensor failure detection and fusion system for a multi-car ropeless elevator system |
| JP6531642B2 (ja) * | 2015-12-24 | 2019-06-19 | 株式会社ダイフク | 物品搬送設備 |
| US20170355562A1 (en) * | 2016-06-10 | 2017-12-14 | Otis Elevator Company | Fire service sequence for multicar elevator systems |
| US10081513B2 (en) * | 2016-12-09 | 2018-09-25 | Otis Elevator Company | Motion profile for empty elevator cars and occupied elevator cars |
| CN107032221A (zh) * | 2017-05-09 | 2017-08-11 | 绳季清 | 直线蜗轮电梯 |
| CN106927337A (zh) * | 2017-05-09 | 2017-07-07 | 绳季清 | 高层建筑双通道直线蜗轮电梯井道 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1580310A (en) * | 1924-09-17 | 1926-04-13 | Daniel F Lepley | Removable elevator cage |
| US1939729A (en) * | 1930-01-29 | 1933-12-19 | Thomas W Cohill | Elevator system |
| US2052690A (en) * | 1934-08-03 | 1936-09-01 | John T Austin | Elevator |
| US2626721A (en) * | 1945-04-25 | 1953-01-27 | Armitage & Bertram Ltd | Unloading system for mines |
| DE1912520A1 (de) * | 1969-03-12 | 1970-09-17 | Foerster Dr Med Hans Rudolf | Fahrstuhlsystem fuer schnellen Massenverkehr,insbesondere in Hochhaeusern |
| US3750849A (en) * | 1970-04-21 | 1973-08-07 | Westinghouse Electric Corp | Duplex counterweightless shuttle elevator system |
| US3658155A (en) * | 1970-09-15 | 1972-04-25 | William G Salter | Elevator system |
| DE2154923A1 (de) * | 1971-11-04 | 1973-05-10 | Adolf H Borst | Personenaufzug |
| EP0388814B1 (en) * | 1989-03-20 | 1995-08-09 | Hitachi, Ltd. | Passenger transport installation |
| JPH04361968A (ja) * | 1991-06-11 | 1992-12-15 | Mitsubishi Electric Corp | エレベーター装置 |
-
1995
- 1995-11-29 US US08/564,534 patent/US5651426A/en not_active Expired - Lifetime
-
1996
- 1996-11-07 ZA ZA969381A patent/ZA969381B/xx unknown
- 1996-11-08 CA CA002189919A patent/CA2189919A1/en not_active Abandoned
- 1996-11-25 KR KR1019960057164A patent/KR970026873A/ko not_active Application Discontinuation
- 1996-11-26 AU AU71982/96A patent/AU7198296A/en not_active Abandoned
- 1996-11-28 CN CN96121364A patent/CN1160011A/zh active Pending
- 1996-11-29 EP EP96308661A patent/EP0781724A3/en not_active Withdrawn
- 1996-11-29 JP JP8319338A patent/JPH09165148A/ja not_active Withdrawn
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN107922158A (zh) * | 2015-08-03 | 2018-04-17 | 奥的斯电梯公司 | 中间转运站 |
| US10865072B2 (en) | 2015-08-03 | 2020-12-15 | Otis Elevator Company | Intermediate transfer station |
| CN106335829A (zh) * | 2016-11-10 | 2017-01-18 | 山东建筑大学 | 一种移动对接立体式连通电梯 |
| CN110612266A (zh) * | 2017-05-11 | 2019-12-24 | 蒂森克虏伯电梯股份公司 | 具有两个井道的电梯系统 |
| CN110612266B (zh) * | 2017-05-11 | 2022-07-08 | 蒂森克虏伯电梯创新与运营有限公司 | 具有两个井道的电梯系统 |
| CN107285167A (zh) * | 2017-07-31 | 2017-10-24 | 山东建筑大学 | 一种可垂直和横向移动的电梯 |
| CN107285167B (zh) * | 2017-07-31 | 2019-04-05 | 山东建筑大学 | 一种可垂直和横向移动的电梯 |
| CN112888647A (zh) * | 2018-08-21 | 2021-06-01 | 蒂森克虏伯电梯创新与运营有限公司 | 具有第一部分电梯系统和第二部分电梯系统的电梯系统 |
| CN111252647A (zh) * | 2020-03-11 | 2020-06-09 | 长沙宁湖机械设备有限公司 | 一种三厢双层停靠式电梯 |
| CN111252647B (zh) * | 2020-03-11 | 2021-09-03 | 天津优视津阳金属制品有限公司 | 一种三厢双层停靠式电梯 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU7198296A (en) | 1997-06-12 |
| ZA969381B (en) | 1997-06-02 |
| EP0781724A2 (en) | 1997-07-02 |
| CA2189919A1 (en) | 1997-05-30 |
| KR970026873A (ko) | 1997-06-24 |
| JPH09165148A (ja) | 1997-06-24 |
| US5651426A (en) | 1997-07-29 |
| EP0781724A3 (en) | 1998-06-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1160011A (zh) | 同步穿梭电梯系统 | |
| CN103132756B (zh) | 一种塔式立体车库 | |
| US5758748A (en) | Synchronized off-shaft loading of elevator cabs | |
| CN1099366C (zh) | 沿水平和铅直方向的乘客运送方法及系统 | |
| MXPA03004344A (es) | Instalacion de ascensores con varias cabinas autopropulsadas y como minimo tres cajas de ascensor dispuestas una junto a otra. | |
| CN202416942U (zh) | 智能型多层立体车库 | |
| JPH1067471A (ja) | ローカルエレベータを備えたシャトルエレベータ | |
| US5752585A (en) | Elevator shuttle with auxiliary elevators at terminals | |
| US5829553A (en) | Fail-safe movement of elevator cabs between car frames and landings | |
| CN109184299B (zh) | 一种双排双层立体式机械停车装置及其车辆停取方法 | |
| CN1410640A (zh) | 一种智能型高层立体车库 | |
| EP0414626A1 (en) | Multi-storey car park | |
| CN1154338A (zh) | 紧急电梯舱室征用传送装置 | |
| GB2320013A (en) | Elevator shuttle system | |
| CN212336854U (zh) | 一种跨运式平面移动停车设备 | |
| CN212453845U (zh) | 地上宽轿厢旋转升降机 | |
| CN111764718A (zh) | 一种跨运式平面移动停车设备 | |
| CN2492547Y (zh) | 循环式多出入口的电梯 | |
| WO1991012397A1 (en) | Automatic multistorey parking building structure | |
| JP2004168530A (ja) | 可動式ダブルデッキエレベータの自動階床学習装置および自動階床学習方法 | |
| JPH03137366A (ja) | エレベータ式立体駐車装置の車両移載入出庫機構 | |
| CN110748212B (zh) | 一种便于泊车的立体停车系统 | |
| CN210918406U (zh) | 仅有一个出口的梳齿式多层循环车库 | |
| RU60961U1 (ru) | Автоматизированная многоуровневая стоянка для автомобилей и ее узлы | |
| JPH1150683A (ja) | 立体駐車場 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| AD01 | Patent right deemed abandoned | ||
| C20 | Patent right or utility model deemed to be abandoned or is abandoned | ||
| AD01 | Patent right deemed abandoned | ||
| C20 | Patent right or utility model deemed to be abandoned or is abandoned |