CN111183358B - 构造物评价系统、构造物评价装置以及构造物评价方法 - Google Patents
构造物评价系统、构造物评价装置以及构造物评价方法 Download PDFInfo
- Publication number
- CN111183358B CN111183358B CN201880055335.XA CN201880055335A CN111183358B CN 111183358 B CN111183358 B CN 111183358B CN 201880055335 A CN201880055335 A CN 201880055335A CN 111183358 B CN111183358 B CN 111183358B
- Authority
- CN
- China
- Prior art keywords
- elastic wave
- evaluation
- wave source
- sensor
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000011156 evaluation Methods 0.000 title claims abstract description 293
- 238000009826 distribution Methods 0.000 claims abstract description 71
- 230000006866 deterioration Effects 0.000 claims abstract description 20
- 230000015556 catabolic process Effects 0.000 claims description 29
- 238000006731 degradation reaction Methods 0.000 claims description 29
- 238000012937 correction Methods 0.000 claims description 23
- 238000009434 installation Methods 0.000 claims description 22
- 238000012545 processing Methods 0.000 description 45
- 238000000034 method Methods 0.000 description 15
- 230000008569 process Effects 0.000 description 14
- 238000010586 diagram Methods 0.000 description 10
- 230000003902 lesion Effects 0.000 description 9
- 238000004891 communication Methods 0.000 description 7
- 238000001514 detection method Methods 0.000 description 7
- 230000000630 rising effect Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 238000003860 storage Methods 0.000 description 6
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 238000005259 measurement Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 238000005401 electroluminescence Methods 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000000605 extraction Methods 0.000 description 2
- 238000010438 heat treatment Methods 0.000 description 2
- 239000002245 particle Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 230000003321 amplification Effects 0.000 description 1
- 239000010426 asphalt Substances 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 239000011435 rock Substances 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000009827 uniform distribution Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/07—Analysing solids by measuring propagation velocity or propagation time of acoustic waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/14—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object using acoustic emission techniques
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/04—Analysing solids
- G01N29/043—Analysing solids in the interior, e.g. by shear waves
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/22—Details, e.g. general constructional or apparatus details
- G01N29/24—Probes
- G01N29/2437—Piezoelectric probes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N29/00—Investigating or analysing materials by the use of ultrasonic, sonic or infrasonic waves; Visualisation of the interior of objects by transmitting ultrasonic or sonic waves through the object
- G01N29/44—Processing the detected response signal, e.g. electronic circuits specially adapted therefor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/02—Indexing codes associated with the analysed material
- G01N2291/023—Solids
- G01N2291/0232—Glass, ceramics, concrete or stone
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2291/00—Indexing codes associated with group G01N29/00
- G01N2291/10—Number of transducers
- G01N2291/106—Number of transducers one or more transducer arrays
Landscapes
- Physics & Mathematics (AREA)
- Biochemistry (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Acoustics & Sound (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- Investigating Or Analyzing Materials By The Use Of Ultrasonic Waves (AREA)
Abstract
实施方式的构造物评价系统具有多个传感器、位置标定部以及评价部。多个传感器检测弹性波。位置标定部根据由所述多个传感器分别检测出的多个弹性波,标定弹性波的发生源的位置。评价部根据基于所述弹性波的发生源的位置标定结果得到的示出所述发生源的位置的弹性波源分布和传感器的有无,评价构造物的劣化状态。
Description
技术领域
本发明的实施方式涉及构造物评价系统、构造物评价装置以及构造物评价方法。
背景技术
通过在桥梁、岩盘等构造物的表面设置传感器(例如AE(Acoustic Emission,声发射)传感器),能够检测从构造物内部的损伤部位发生的弹性波。通过在构造物的表面设置多个传感器,能够根据传感器之间的弹性波到达时刻的差,标定弹性波的发生源(以下称为“弹性波源”)的位置。另外,通过从外部对构造物提供冲击也会发生弹性波,所以能够标定弹性波源的位置。但是,在弹性波的传播路径中有损伤的情况下,弹性波的传播被妨碍,所以利用传感器的弹性波的检测精度降低。其结果,弹性波源的位置标定精度也降低。利用这样的构造物的特性,能够根据位置标定出的弹性波源的分布的错乱检测构造物内部的损伤。
然而,取决于在构造物内部有损伤的区域和传感器的设置位置的关系,有时会错误地评定弹性波源的位置。其结果,存在构造物的劣化状态的评价精度降低的情况。
现有技术文献
专利文献
专利文献1:日本特开2004-125721号公报
发明内容
本发明想要解决的问题在于提供一种能够提高构造物的劣化状态的评价精度的构造物评价系统、构造物评价装置以及构造物评价方法。
实施方式的构造物评价系统具有多个传感器、位置标定部以及评价部。多个传感器检测弹性波。位置标定部根据由所述多个传感器分别检测出的多个弹性波,标定弹性波的发生源的位置。评价部根据基于所述弹性波的发生源的位置标定结果得到的示出所述发生源的位置的弹性波源分布和传感器的有无,评价构造物的劣化状态。
附图说明
图1是示出第1实施方式中的构造物评价系统的结构的图。
图2是示出在对构造物施与了均匀的冲击的情况下通过位置标定部进行弹性波源的位置标定而生成的弹性波源分布的图。
图3是图2中的弹性波源分布的等密图。
图4A是在损伤的正下方设置有传感器的情况下的构造物的剖面图。
图4B是在损伤的正下方未设置传感器的情况下的构造物的剖面图。
图5是示出第1实施方式中的构造物评价装置进行的劣化状态的评价处理的流程的流程图。
图6是示出第2实施方式中的构造物评价系统的结构的图。
图7是示出第2实施方式中的构造物评价装置进行的劣化状态的评价处理的流程的流程图。
图8是示出第3实施方式中的构造物评价系统的结构的图。
图9是用于说明第3实施方式中的构造物评价装置具备的校正部的处理的图。
图10是示出第3实施方式中的构造物评价装置进行的劣化状态的评价处理的流程的流程图。
具体实施方式
以下,参照附图说明实施方式的构造物评价系统、构造物评价装置以及构造物评价方法。
(第1实施方式)
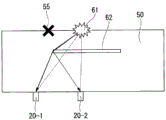
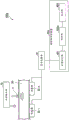
图1是示出第1实施方式中的构造物评价系统100的结构的图。
构造物评价系统100被用于构造物的健全性的评价。在以下的说明中,评价意味着根据某个基准确定构造物的健全性的程度即构造物的劣化状态。此外,在以下的说明中,作为构造物的一个例子,以由混凝土构成的桥梁为例子进行说明,但构造物无需限定于桥梁。例如,构造物只要是伴随裂缝的产生或者发展、或者外部的冲击(例如雨、人工降雨等)而发生弹性波的构造物,则可以是任意的构造物。此外,桥梁不限于在河流、溪谷等上架设的构造物,还包括设置于比地面更上方的各种构造物(例如高速公路的高架桥)等。
另外,作为对构造物的劣化状态的评价造成影响的损伤,例如有裂缝、窟窿、砂土化等妨碍弹性波的传播的构造物内部的损伤。在此,裂缝包括纵向的裂缝、横向的裂缝以及倾斜方向的裂缝等。纵向的裂缝是指,在与设置有传感器的构造物的面垂直的方向上产生的裂缝。横向的裂缝是指,在与设置有传感器的构造物的面水平的方向上产生的裂缝。倾斜方向的裂缝是指,在与设置有传感器的构造物的面并非水平以及垂直的方向上产生的裂缝。砂土化是指,主要在沥青与混凝土基板的边界部混凝土变化为砂土状的劣化。
构造物评价系统100具备冲击施与部10、多个传感器20-1~20-n(n为2以上的整数)、信号处理部30以及构造物评价装置40。信号处理部30和构造物评价装置40以有线或者无线方式可通信地连接。此外,在以下的说明中,在不区分传感器20-1~20-n的情况下,记载为传感器20。
冲击施与部10通过对构造物50提供冲击11,使构造物内部发生弹性波。冲击施与部10例如是设置于在构造物50上行驶的交通工具的装置。冲击施与部10对构造物50的路面以均匀的分布施与许多冲击11。只要对构造物50的路面的宽度范围提供冲击11的施与即可。例如,通过水滴、冰粒、固体物的散布、利用锤头等锤子的连续击打、利用激光的加热等进行冲击11的施与。在冲击施与部10作为冲击11的施与散布水滴的情况下,最好能够通过喷嘴的调整、吐出定时的控制来控制碰撞到路面的水滴的尺寸和定时。在利用锤头等锤子的连续击打中,也最好能够将冲击11的强度和定时控制为期望的值。
传感器20设置于构造物50。例如,传感器20设置于与冲击施与部10提供冲击11的面相反的一侧的面。传感器20具有压电元件,检测从构造物50内部发生的弹性波,将检测到的弹性波变换为作为电压信号的AE源信号。传感器20对AE源信号实施放大、频率限制等处理,输出到信号处理部30。此外,也可以代替传感器20而使用加速度传感器。在该情况下,加速度传感器通过进行与传感器20同样的处理,将信号处理后的信号输出到信号处理部30。构造物50的厚度例如是15cm以上。
信号处理部30将基于传感器20的处理被实施后的AE源信号作为输入。信号处理部30通过对输入的AE源信号进行所需的噪声去除、参数抽出等信号处理,抽出包含与弹性波有关的信息的AE特征量。与弹性波有关的信息例如是AE源信号的振幅、能量、上升沿时间、持续时间、频率、零交叉计数数等信息。信号处理部30将基于抽出的AE特征量的信息作为AE信号输出到构造物评价装置40。在信号处理部30输出的AE信号中,包含传感器ID、AE检测时刻、AE源信号振幅、能量、上升沿时间以及频率等信息。AE检测时刻表示由传感器20检测到弹性波的时刻。
信号处理部30进行的信号处理例如是噪声去除、参数抽出等。另外,与弹性波有关的信息例如是AE源信号的振幅、能量、上升沿时间、持续时间、频率、零交叉计数数等信息。信号处理部30将基于抽出的AE特征量的信息作为AE信号输出到构造物评价装置40。在信号处理部30输出的AE信号中,包含传感器ID、AE检测时刻、AE源信号振幅、能量、上升沿时间以及频率等信息。
在此,AE源信号的振幅例如是在弹性波中最大振幅的值。能量例如是在各时间点下对振幅进行平方并对其结果进行时间积分而得到的值。此外,能量的定义不限定于上述例子,例如也可以是使用波形的包络线近似的例子。上升沿时间例如是弹性波从零值起超过预先设定的预定值至上升沿的时间。持续时间例如是从弹性波的上升沿开始至振幅变得小于预先设定的值的时间。频率是弹性波的频率。零交叉计数数例如是弹性波横穿通过零值的基准线的次数。
构造物评价装置40具备用总线连接的CPU(Central Processing Unit,中央处理单元)、存储器、辅助存储装置等,执行评价程序。通过评价程序的执行,构造物评价装置40作为具备位置标定部401、评价部402、显示部403的装置发挥功能。此外,构造物评价装置40的各功能的全部或者一部分也可以使用ASIC(Application Specific IntegratedCircuit,专用集成电路)、PLD(Programmable Logic Device,可编程逻辑器件)、FPGA(Field Programmable Gate Array,现场可编程门阵列)等硬件实现。另外,评价程序也可以记录于计算机可读取的记录介质。计算机可读取的记录介质例如是软盘、光磁盘、ROM、CD-ROM等可移动介质、内置于计算机系统的硬盘等存储装置。另外,评价程序也可以经由电气通信线路发送接收。
位置标定部401将从信号处理部30输出的AE信号作为输入。另外,位置标定部401将与对构造物50设置的传感器20的设置位置有关的信息(以下称为“传感器位置信息”)与传感器ID对应起来预先保持。与设置位置有关的信息例如是纬度以及经度或者从作为构造物50的基准的位置起的水平方向以及垂直方向上的距离等。
位置标定部401根据包含于输入的AE信号的传感器ID、AE检测时刻等信息和预先保持的传感器位置信息,进行弹性波源的位置标定。具体而言,位置标定部401根据弹性波向多个传感器20的到达时刻即AE检测时刻的差,评定弹性波源的位置。位置标定部401使用在一定期间的期间中得到的多个弹性波源的位置的信息,生成构造物50内的评价对象区域中的弹性波源分布。构造物50内的评价对象区域是指由传感器20包围的区域。弹性波源分布是表示评定的弹性波源的位置的分布。位置标定部401将生成的弹性波源分布输出到评价部402。
评价部402将从位置标定部401输出的弹性波源分布作为输入。评价部402根据输入的弹性波源分布和传感器20的设置位置,评价构造物50的劣化状态。具体而言,评价部402根据弹性波源分布,取得弹性波源分布中的弹性波的特征量,使用取得的特征量和传感器20的设置位置,评价构造物50的劣化状态。弹性波源分布中的弹性波的特征量例如是弹性波源的密度、弹性波的数量以及弹性波的振幅。
作为具体的处理,首先,评价部402将弹性波源分布分为适于评价的区域(以下称为“评价区域”)。评价区域被预先设定。例如,以想要检测的损伤的尺寸以下且被施与冲击11的位置包括1个或者多个的方式设定评价区域。使区域的间隔越窄,则越能够评价有无更小的损伤。另外,在1个区域中包含被施与越多的冲击11的位置,密度的差越显著而评价的精度越进一步提高。
接下来,评价部402针对每个评价区域,计算弹性波源的密度。然后,评价部402将针对每个评价区域计算出的弹性波源的密度与预先设定的第1阈值以及第2阈值的至少任意一个进行比较,从而评价构造物50的劣化状态。第2阈值大于第1阈值。评价部402使评价结果显示于显示部403。
显示部403是液晶显示器、有机EL(Electro Luminescence,电致发光)显示器等图像显示装置。显示部403依照评价部402的控制,显示评价结果。显示部403也可以是用于将图像显示装置与构造物评价装置40连接的接口。在该情况下,显示部403生成用于显示评价结果的影像信号,向与自身连接的图像显示装置输出影像信号。
接下来,说明如上所述设定第1阈值以及第2阈值的原因。
图2是示出在对构造物50施与均匀的冲击11的情况下通过位置标定部401进行弹性波源的位置标定而生成的弹性波源分布的图。另外,图3是图2中的弹性波源分布的等密图。在图2以及图3中,纵轴以及横轴表示评价对象区域的长度(m)。图2以及图3的黑圆的位置表示传感器20的设置位置。在图2以及图3中,示出设置有15个传感器20的情况。图2的三角55的位置表示弹性波源的位置。
设为在图2所示的区域60-1以及60-2内有损伤。在区域60-1以及60-2中有损伤,但在图2所示的例子中,与区域60-2相比在区域60-1内弹性波源被评定得比较少。2个区域的差异点在于,在区域60-1内在损伤正下方设置有传感器20,在区域60-2内在损伤正下方未设置传感器20。此外,在图2中,虚线所示的格状的区域56分别是评价区域。
参照图3,在区域60-1内由损伤引起的弹性波源的密度的降低显著,相对于此,在区域60-2内由于损伤引起的弹性波源的密度相对大。因此,在评价部402利用相同的1个阈值评价区域60-1以及60-2内的情况下,在阈值过低时,在区域60-2内损伤部分的弹性波源的密度不低于阈值,不被评价为损伤。另一方面,在阈值过大时,当在区域60-1内由于冲击施与的条件、测量条件等测量时的执行方法的偏差而在弹性波的密度中产生稍微的差异时,损伤部分被错误地评价为健全。
使用图4,说明产生如上述的现象的原因。
图4A是在损伤62的正下方设置有传感器20的情况下的构造物50的剖面图。图4B是在损伤62的正下方未设置传感器20的情况下的构造物50的剖面图。在图4A以及图4B中,作为损伤62,以横向的损伤为例子示出,但如上所述本实施方式中的损伤是裂缝、窟窿、砂土化等。在图4A以及图4B中,符号61表示冲击11的施与位置。由于在施与位置61处被提供的冲击11在构造物50的上表面产生的弹性波的传播被损伤62妨碍,所以几乎不透过损伤62。因此,由于损伤62而被衍射的弹性波到达传感器20。
在图4A的情况下,弹性波的衍射角度大,所以衰减大,弹性波难以到达损伤62正下方的传感器20。另外,即使弹性波到达了传感器20,由于向在图4A中示出的传感器20-1以及20-2的各个传感器的到达时刻的差等于来自损伤62的端部的时刻差,所以弹性波源被标定为损伤62的端部的位置。这样,在损伤62的正下方设置有传感器20的情况下,产生损伤62的区域的弹性波源的密度显著降低。
另一方面,在图4B的情况下,衍射角度相对小,弹性波衍射而到达传感器20的情形变多。另外,有时向在图4B中示出的传感器20-1以及20-2的各个传感器的到达时刻差与无损伤62的情况相比变化不大。因此,被标定于损伤62的正上方的位置的弹性波源增加。这样,在损伤62的正下方未设置传感器20的情况下,产生损伤的区域的弹性波源的密度的降低比在损伤62的正下方设置有传感器20的情况小。
以上,根据在产生损伤62的区域的下部是否设置有传感器20,弹性波源的密度的降低程度不同。因此,本实施方式中的构造物评价装置40根据弹性波源分布和传感器20的设置位置,评价构造物50的劣化状态。
图5是示出第1实施方式中的构造物评价装置40进行的劣化状态的评价处理的流程的流程图。
位置标定部401取得从信号处理部30输出的AE信号(步骤S101)。位置标定部401根据包含于取得的AE信号的传感器ID、AE检测时刻等信息和预先保持的传感器位置信息,进行弹性波源的位置标定(步骤S102)。之后,位置标定部401使用位置标定结果,生成弹性波源分布(步骤S103)。
位置标定部401将生成的弹性波源分布和传感器20的设置位置的信息输出到评价部402。评价部402取得从位置标定部401输出的弹性波源分布和传感器20的设置位置的信息。评价部402对取得的弹性波源分布设定评价区域(步骤S104)。例如,评价部402如图2所示对弹性波源分布设定评价区域(图2所示的区域56)。
评价部402选择设定的多个评价区域中的1个评价区域(步骤S105)。此时,评价部402选择与阈值未进行比较的评价区域。接下来,评价部402导出选择的评价区域内的弹性波源的密度(步骤S106)。评价部402判定导出的弹性波源的密度(第1特征量)是否是第1阈值以上(步骤S107)。在弹性波源的密度是第1阈值以上的情况下(步骤S107-“是”),评价部402判定导出的弹性波源的密度(第1特征量)是否是第2阈值以上(步骤S108)。
在弹性波源的密度是第2阈值以上的情况下(步骤S108-“是”),评价部402将选择的评价区域评价为健全(步骤S109)。评价部402判定是否评价了所有评价区域(步骤S110)。在评价了所有评价区域的情况下(步骤S110-“是”),评价部402将评价结果输出到显示部403。显示部403依照评价部402的控制,显示评价结果(步骤S111)。具体而言,显示部403针对弹性波源分布的每个评价区域,重叠显示评价结果(健全或者劣化)。
在步骤S110的处理中未评价所有评价区域的情况下(步骤S110-“否”),评价部402执行步骤S105及其以后的处理。
另外,在步骤S107的处理中弹性波源的密度小于第1阈值的情况下(步骤S107-“否”),评价部402将选择的评价区域评价为劣化(步骤S112)。
另外,在步骤S108的处理中弹性波源的密度小于第2阈值的情况下(步骤S108-“否”),评价部402使用传感器20的设置位置的信息,判定在选择的评价区域内是否设置有传感器20(步骤S113)。
在选择的评价区域内设置有传感器20的情况下(步骤S113-“是”),评价部402将选择的评价区域评价为健全(步骤S109)。
另一方面,在选择的评价区域内未设置传感器20的情况下(步骤S113-“否”),评价部402将选择的评价区域评价为劣化(步骤S112)。
根据如以上所述构成的构造物评价系统100,构造物评价装置40根据评价区域内的弹性波源的密度和评价区域内的传感器20的有无,评价劣化状态,从而能够提高构造物的劣化状态的评价精度。具体而言,构造物评价装置40在评价区域内的弹性波源的密度小于第2阈值的情况下,判定在评价区域内是否设置有传感器20。在设置有传感器20的附近,存在弹性波源的密度变低的趋势。因此,构造物评价装置40在即使弹性波源的密度小于第2阈值而满足了评价为劣化的条件但在评价区域内设置有传感器20的情况下,将评价区域评价为健全。另外,在弹性波源的密度小于第2阈值且在评价区域内未设置传感器20的情况下,构造物评价装置40将评价区域评价为劣化。通过这样构成,能够抑制传感器20的设置位置所引起的错误的评价。因此,能够提高构造物的劣化状态的评价精度。
另外,构造物评价装置40如第1阈值以及第2阈值那样使用2个阈值来评价劣化状态。例如,在构造物50内部整体有损伤的情况下,构造物评价装置40通过比较第1阈值和评价区域中的密度,将评价区域全部判断为劣化。由此,构造物评价装置40能够在比较第2阈值和评价区域中的密度之前的阶段中判断为劣化。因此,与仅使用第2阈值评价构造物的劣化状态相比,能够进一步提高评价精度。
以下,说明第1实施方式中的构造物评价系统100的变形例。
在本实施方式中,示出构造物评价装置40比较第1阈值以及第2阈值和作为弹性波源分布中的弹性波的特征量之一的弹性波源的密度的结构,但构造物评价装置40的处理无需限定于此。例如,构造物评价装置40也可以构成为比较作为弹性波源分布中的弹性波的特征量之一的弹性波的振幅(第2特征量)和针对弹性波的振幅的第1阈值,比较第2阈值和弹性波源的密度(第1特征量)。在使用弹性波的振幅的情况下,评价部402针对每个评价区域,导出弹性波的振幅的平均值,比较导出的振幅的平均值和第1阈值。
构造物评价装置40也可以构成为根据1个阈值和传感器20的设置位置,评价构造物50的劣化状态。在这样构成的情况下,构造物评价装置40不执行步骤S107的处理,在步骤S106的处理之后执行步骤S108的处理。
(第2实施方式)
在第2实施方式中,构造物评价系统根据评价区域是否包含于以各传感器为中心的预定范围,评价构造物的劣化状态。
图6是示出第2实施方式中的构造物评价系统100a的结构的图。
构造物评价系统100a具备冲击施与部10、多个传感器20-1~20-n、信号处理部30以及构造物评价装置40a。构造物评价系统100a在代替构造物评价装置40而具备构造物评价装置40a这点,结构与构造物评价系统100不同。以下,仅说明构造物评价装置40a。
构造物评价装置40a具备用总线连接的CPU、存储器、辅助存储装置等,执行评价程序。通过评价程序的执行,构造物评价装置40a作为具备位置标定部401、评价部402a、显示部403的装置发挥功能。此外,构造物评价装置40a的各功能的全部或者一部分也可以使用ASIC、PLD、FPGA等硬件实现。另外,评价程序也可以记录于计算机可读取的记录介质。计算机可读取的记录介质例如是软盘、光磁盘、ROM、CD-ROM等可移动介质、内置于计算机系统的硬盘等存储装置。另外,评价程序也可以经由电气通信线路发送接收。
构造物评价装置40a在代替评价部402而具备评价部402a这点,结构与构造物评价装置40不同。构造物评价装置40a的其他结构与构造物评价装置40相同。因此,仅说明评价部402a中的与评价部402的不同点。
评价部402a在弹性波源的密度小于第2阈值的情况下,根据评价区域是否包含于以各传感器20为中心的预定范围,评价构造物50的劣化状态。以传感器20为中心的预定范围是指,以传感器20为中心设定的范围,例如,可以是以传感器20为中心的半径D的范围,也可以是以传感器20为中心的在X方向和Y方向上距离不同的四边形的范围。距离D被设定为相对传感器间隔足够小。评价部402a将评价结果输出到显示部403。
图7是示出第2实施方式中的构造物评价装置40a进行的劣化状态的评价处理的流程的流程图。此外,在图7中,在与图5同样的处理中附加相同的符号而省略说明。
在步骤S108的处理中弹性波源的密度小于第2阈值的情况下(步骤S108-“否”),评价部402a判定评价区域是否包含于以各传感器20为中心的预定范围(步骤S201)。评价部402a在评价区域的一部分或者全部包含于以各传感器20为中心的预定范围的情况下,判定为评价区域包含于以传感器20为各传感器20为中心的预定范围。评价部402a在评价区域的全部未包含于以各传感器20为中心的预定范围的情况下,判定为评价区域未包含于以各传感器20为中心的预定范围。
在评价区域包含于以各传感器20为中心的预定范围的情况下(步骤S201-“是”),评价部402a将选择的评价区域评价为健全(步骤S109)。
另一方面,在评价区域未包含于以各传感器20为中心的预定范围的情况下(步骤S201-“否”),评价部402a将选择的评价区域评价为劣化(步骤S112)。
如以上所述构成的构造物评价系统100a在评价区域内的弹性波源的密度小于第2阈值的情况下,判定评价区域是否包含于以传感器20为中心的预定范围。如上所述,在设置有传感器20的附近,存在弹性波源的密度变低的趋势。因此,构造物评价装置40a在即使弹性波源的密度小于第2阈值而满足了评价为劣化的条件但在评价区域包含于以传感器20为中心的预定范围的情况下,将评价区域评价为健全。另外,在弹性波源的密度小于第2阈值且评价区域未包含于以传感器20为中心的预定范围的情况下,构造物评价装置40a将评价区域评价为劣化。通过这样构成,能够抑制传感器20的设置位置所引起的错误的评价。因此,能够提高构造物的劣化状态的评价精度。
也可以与构造物评价系统100同样地变形第2实施方式中的构造物评价系统100a。
(第3实施方式)
在第3实施方式中,构造物评价系统通过校正弹性波源密度分布,评价构造物的劣化状态。
图8是示出第3实施方式中的构造物评价系统100b的结构的图。
构造物评价系统100b具备冲击施与部10、多个传感器20-1~20-n、信号处理部30以及构造物评价装置40b。构造物评价系统100b在代替构造物评价装置40而具备构造物评价装置40b这点,结构与构造物评价系统100不同。以下,仅说明构造物评价装置40b。
构造物评价装置40b具备用总线连接的CPU、存储器、辅助存储装置等,执行评价程序。通过评价程序的执行,构造物评价装置40b作为具备位置标定部401、评价部402b、显示部403、校正部404b的装置发挥功能。此外,构造物评价装置40b的各功能的全部或者一部分也可以使用ASIC、PLD、FPGA等硬件实现。另外,评价程序也可以记录于计算机可读取的记录介质。计算机可读取的记录介质例如是软盘、光磁盘、ROM、CD-ROM等可移动介质、内置于计算机系统的硬盘等存储装置。另外,评价程序也可以经由电气通信线路发送接收。
构造物评价装置40b在代替评价部402而具备评价部402b这点、新具备校正部404b这点,结构与构造物评价装置40不同。构造物评价装置40b的其他结构与构造物评价装置40相同。因此,仅说明评价部402b以及校正部404b。
评价部402b使用导出的每个评价区域的弹性波源的密度和弹性波源分布,生成弹性波源密度分布。弹性波源密度分布是表示弹性波源的密度的分布。例如,用如图3那样的等密图表示弹性波源密度分布。评价部402b根据由校正部404校正后的校正后弹性波源密度分布,评价构造物的劣化状态。评价部402b将评价结果输出到显示部403。
校正部404针对弹性波源密度分布根据与传感器20的位置相距的距离进行不同的处理,从而校正弹性波源密度分布。使用图9说明校正部404的具体的处理。
图9是用于说明校正部404的处理的图。
如图9所示,校正部404在弹性波源密度分布的区域中的、与传感器20的设置位置相距的距离比D更内侧的区域70中不进行校正。另外,校正部404在弹性波源密度分布的区域中的、与传感器20的设置位置相距的距离比D更外侧、即从传感器20的设置位置起相距距离D以上的区域71中进行以下的校正。例如,校正部404对在弹性波源密度分布中得到的弹性波源密度的值根据校正系数k针对弹性波源密度p进行p′=M-k(M-p)的运算,导出校正后的弹性波源密度p′。在此,M是健全的区域中的平均弹性波源密度。另外,校正系数k以及距离D无需是常数,也可以使用根据传感器间隔等测量条件而连续地变化的系数等。
图10是示出第3实施方式中的构造物评价装置40b进行的劣化状态的评价处理的流程的流程图。此外,在图10中,在与图5同样的处理中附加相同的符号而省略说明。
在步骤S104的处理后,评价部402b针对每个评价区域,导出弹性波源的密度(步骤S301)。评价部402b使用导出的每个评价区域的弹性波源的密度和弹性波源分布,生成弹性波源密度分布(步骤S302)。评价部402b将生成的弹性波源密度分布输出到校正部404。
校正部404b根据传感器20的设置位置,校正生成的弹性波源密度分布,从而生成校正后弹性波源密度分布(步骤S303)。校正部404b将校正后弹性波源密度分布输出到评价部402b。评价部402b选择从校正部404b输出的校正后弹性波源密度分布中的评价区域中的1个评价区域(步骤S304)。校正后弹性波源密度分布中的评价区域与评价部402b在步骤S104的处理中对弹性波源分布设定的评价区域相同。
评价部402b判定选择的评价区域中的弹性波源的密度是否是第1阈值以上(步骤S305)。在弹性波源的密度是第1阈值以上的情况下(步骤S305-“是”),评价部402b将选择的评价区域评价为健全(步骤S306)。评价部40b2判定是否评价了所有评价区域(步骤S307)。在评价了所有评价区域的情况下(步骤S307-“是”),评价部402b将评价结果输出到显示部403。
在步骤S307的处理中未评价所有评价区域的情况下(步骤S307-“否”),评价部402b执行步骤S304及其以后的处理。
另外,在步骤S305的处理中弹性波源的密度小于第1阈值的情况下(步骤S305-“否”),评价部402b将选择的评价区域评价为劣化(步骤S308)。
如以上所述构成的构造物评价系统100b通过根据与传感器20的设置位置相距的距离校正弹性波源密度分布,评价构造物50的劣化状态。通过利用校正系数校正弹性波源密度分布,校正由弹性波源密度分布表示的密度。通过这样构成,能够抑制传感器20的设置位置所引起的错误的评价。因此,能够提高构造物的劣化状态的评价精度。
以下,说明各实施方式中共同的变形例。
在构造物评价系统100、100a以及100b中,具备3个以上的传感器20即可。
构造物评价系统100、100a以及100b也可以不具备冲击施与部10。在这样构成的情况下,人工提供针对构造物50的冲击11即可。人工提供的针对构造物50的冲击11例如是水滴、冰粒、固体物的散布、利用锤头、铁锤等锤子的连续击打、利用激光的加热等。
评价区域无需限定于如图2所示的格状。具体而言,评价区域只要是想要检测的损伤的尺寸以下且包括1个或者多个被施与冲击11的位置的区域,则可以是任意的形式。例如,评价区域可以是圆形,也可以是具有多个顶点的矩形(例如n边形(n为3以上的整数)),还可以是手写指定的区域。另外,评价区域也可以是想要检测的损伤的尺寸以下的区域。
构造物评价装置40具备的各功能部也可以一部分或者全部设置于其他框体。例如,也可以构造物评价装置40仅具备评价部402,位置标定部401以及显示部403设置于其他框体。在这样构成的情况下,评价部402从不同的框体取得弹性波源分布,使用取得的弹性波源分布评价构造物的健全性。然后,评价部402将评价结果输出到其他框体具备的显示部403。
通过这样构成,通过在弹性波源分布的导出中使用已有的装置,能够抑制构造物评价装置40的制造成本。
信号处理部30也可以构成为对输入的AE源信号中的、具有高于被设定为比噪声水平高的第1阈值的振幅值的AE源信号进行信号处理。具体而言,首先,在检测到比第1阈值大的振动的情况下,信号处理部30将从超过第1阈值的时刻起预定的时间量的信号判断为弹性波波形,保存具有高于第1阈值的振幅值的AE源信号。然后,信号处理部30根据保存的AE源信号表示的弹性波波形的数据,抽出包括与弹性波有关的信息的AE特征量。此外,第1阈值被预先设定。
信号处理部30也可以设置于构造物评价装置40(或者构造物评价装置40a、构造物评价装置40b)。在这样构成的情况下,信号处理部30从传感器20直接或者经由未图示的中继装置取得基于传感器20的处理被实施后的AE源信号。
在图1中,对多个传感器20-1~10-n连接1台信号处理部30,但构造物评价系统100(或者构造物评价系统100a、构造物评价系统100b)也可以构成为具备多台信号处理部30,对各传感器20分别连接信号处理部30而具备多台传感器单元。
另外,评价部402(或者评价部402a、评价部402b)也可以作为输出控制部动作。输出控制部控制输出部,输出评价结果。在此,输出部包括显示部403、通信部以及印刷部。在输出部是通信部的情况下,输出控制部控制通信部,将评价结果发送到其他装置。另外,在输出部是印刷部的情况下,输出控制部控制印刷部,印刷评价结果。此外,构造物评价装置40(或者构造物评价装置40a、构造物评价装置40b)也可以作为输出部而具备显示部403、通信部以及印刷部的一部分或者全部来执行上述动作。
根据以上说明的至少一个实施方式,具有:多个传感器,检测弹性波;位置标定部,根据由多个传感器分别检测出的多个弹性波,标定弹性波源的位置;以及评价部,根据基于弹性波源的位置得到的弹性波源分布和传感器的有无,评价构造物的劣化状态,由此,能够提高构造物的劣化状态的评价精度。
虽然说明了本发明的几个实施方式,但这些实施方式是作为例子而提示的实施方式,不意图限定发明的范围。这些实施方式能够以其他各种方式实施,能够在不脱离发明的要旨的范围内进行各种省略、置换、变更。这些实施方式、其变形与包含于发明的范围、要旨同样地包含于权利要求书记载的发明和其均等的范围。
Claims (5)
1.一种构造物评价系统,其中,具备:
多个传感器,检测弹性波;
位置标定部,根据由所述多个传感器分别检测出的多个弹性波,标定弹性波的发生源的位置;以及
评价部,使用基于所述弹性波的发生源的位置标定结果得到的示出所述发生源的位置的弹性波源分布和所述多个传感器的设置位置的信息这两方,评价构造物的劣化状态,
所述评价部通过分割所述弹性波源分布,设定多个分割区域,将所述弹性波源分布中的第1特征量为第1阈值以上并小于第2阈值且设置有传感器的分割区域或包含于以传感器为中心的预定范围的分割区域评价为健全的区域,将所述第1特征量为所述第1阈值以上并小于所述第2阈值且未设置传感器的分割区域或未包含于以传感器为中心的预定范围的分割区域评价为发生劣化的区域,所述第1特征量为所述发生源的密度、所述弹性波的数量或所述弹性波的振幅中的任意特征量,所述第2阈值为比所述第1阈值大的值。
2.根据权利要求1所述的构造物评价系统,其中,
所述评价部比较所述弹性波源分布中的第2特征量和所述第1阈值,将所述第2特征量小于所述第1阈值的分割区域评价为发生劣化的区域,在所述第2特征量是所述第1阈值以上的情况下,进行基于所述弹性波的所述第1特征量和所述第2阈值的比较结果的评价,所述第2特征量为所述发生源的密度、所述弹性波的数量或所述弹性波的振幅中的任意特征量,且不同于所述第1特征量。
3.根据权利要求1所述的构造物评价系统,其中,
还具备校正部,该校正部对基于所述弹性波源分布得到的表示所述弹性波的发生源的密度的弹性波源密度分布的区域中的、从所述多个传感器各自的设置位置离开阈值以上的距离的区域进行校正,
所述校正部使用在所述弹性波源密度分布中得到的弹性波源密度p、健全的区域中的弹性波源密度的平均值M以及校正系数k,基于p′=M-k(M-p),在所述弹性波源密度分布的区域中的、从所述多个传感器各自的设置位置离开阈值以上的距离的区域中导出校正后的弹性波源密度p′,从而校正所述弹性波源密度分布,
所述评价部使用校正后的弹性波源密度分布,评价所述构造物的劣化状态。
4.一种构造物评价装置,其中,具备:
位置标定部,根据由检测弹性波的多个传感器分别检测出的多个弹性波,标定弹性波的发生源的位置;以及
评价部,使用基于所述弹性波的发生源的位置标定结果得到的示出所述发生源的位置的弹性波源分布和所述多个传感器的设置位置的信息这两方,评价构造物的劣化状态,
所述评价部通过分割所述弹性波源分布,设定多个分割区域,将所述弹性波源分布中的第1特征量为第1阈值以上并小于第2阈值且设置有传感器的分割区域或包含于以传感器为中心的预定范围的分割区域评价为健全的区域,将所述第1特征量为所述第1阈值以上并小于所述第2阈值且未设置传感器的分割区域或未包含于以传感器为中心的预定范围的分割区域评价为发生劣化的区域,所述第1特征量为所述发生源的密度、所述弹性波的数量或所述弹性波的振幅中的任意特征量,所述第2阈值为比所述第1阈值大的值。
5.一种构造物评价方法,其中,具有:
位置标定步骤,根据由检测弹性波的多个传感器分别检测出的多个弹性波,标定弹性波的发生源的位置;以及
评价步骤,使用基于所述弹性波的发生源的位置标定结果得到的示出所述发生源的位置的弹性波源分布和所述多个传感器的设置位置的信息这两方,评价构造物的劣化状态,
在所述评价步骤中,通过分割所述弹性波源分布设定多个分割区域,将所述弹性波源分布中的第1特征量为第1阈值以上并小于第2阈值且设置有传感器的分割区域或包含于以传感器为中心的预定范围的分割区域评价为健全的区域,将所述第1特征量为所述第1阈值以上并小于所述第2阈值且未设置传感器的分割区域或未包含于以传感器为中心的预定范围的分割区域评价为发生劣化的区域,所述第1特征量为所述发生源的密度、所述弹性波的数量或所述弹性波的振幅中的任意特征量,所述第2阈值为比所述第1阈值大的值。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2018/034004 WO2020054026A1 (ja) | 2018-09-13 | 2018-09-13 | 構造物評価システム、構造物評価装置及び構造物評価方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111183358A CN111183358A (zh) | 2020-05-19 |
| CN111183358B true CN111183358B (zh) | 2023-06-02 |
Family
ID=69778245
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880055335.XA Active CN111183358B (zh) | 2018-09-13 | 2018-09-13 | 构造物评价系统、构造物评价装置以及构造物评价方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210181157A1 (zh) |
| EP (1) | EP3851849A4 (zh) |
| JP (2) | JP6857777B2 (zh) |
| CN (1) | CN111183358B (zh) |
| WO (1) | WO2020054026A1 (zh) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6756927B2 (ja) | 2018-02-27 | 2020-09-16 | 株式会社東芝 | 構造物評価システム及び構造物評価方法 |
| JP6857777B2 (ja) * | 2018-09-13 | 2021-04-14 | 株式会社東芝 | 構造物評価システム、構造物評価装置及び構造物評価方法 |
| EP4184161A4 (en) * | 2020-07-16 | 2024-07-03 | Toshiba Kk | STRUCTURE EVALUATION SYSTEM, STRUCTURE EVALUATION DEVICE, AND STRUCTURE EVALUATION METHOD |
| JP7362580B2 (ja) * | 2020-09-16 | 2023-10-17 | 株式会社東芝 | 構造物評価方法、及び構造物評価システム |
| JP7532306B2 (ja) | 2021-04-19 | 2024-08-13 | 株式会社東芝 | 損傷領域推定システム、推定装置及び損傷領域推定方法 |
| JP7508427B2 (ja) | 2021-09-16 | 2024-07-01 | 株式会社東芝 | 構造物評価システム、構造物評価装置及び構造物評価方法 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004170397A (ja) * | 2002-10-28 | 2004-06-17 | Natl Inst For Land & Infrastructure Management Mlit | Aeセンサ及びaeセンサを用いた構造物の異常検出システム並びに安全性評価システム |
| JP2016217974A (ja) * | 2015-05-25 | 2016-12-22 | 三菱電機株式会社 | 測位精度評価装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5528557A (en) * | 1995-08-07 | 1996-06-18 | Northrop Grumman Corporation | Acoustic emission source location by reverse ray tracing |
| WO2002062206A2 (en) * | 2001-02-08 | 2002-08-15 | University Of South Carolina | In-situ structural health monitoring, diagnostics and prognostics system utilizing thin piezoelectric sensors |
| JP3850782B2 (ja) * | 2002-10-07 | 2006-11-29 | 財団法人鉄道総合技術研究所 | 2次起因のae音による構造物損傷度判定方法および装置 |
| JP4422988B2 (ja) * | 2003-08-08 | 2010-03-03 | キヤノン株式会社 | 位置検出装置、光学装置、撮像システムおよびプログラム |
| JP4384132B2 (ja) * | 2006-03-08 | 2009-12-16 | 本田技研工業株式会社 | 内燃機関の制御装置 |
| JP4992084B2 (ja) * | 2006-11-29 | 2012-08-08 | 国立大学法人京都工芸繊維大学 | 構造物の損傷の診断システムおよび方法 |
| WO2009001800A1 (ja) * | 2007-06-22 | 2008-12-31 | Nec Corporation | 画質評価装置、画質評価方法およびプログラム |
| CN101221104B (zh) * | 2007-10-16 | 2010-08-11 | 吴智深 | 基于分布式应变动态测试的结构健康监测方法 |
| KR100883446B1 (ko) * | 2008-02-25 | 2009-02-13 | 주식회사 렉터슨 | 음향방출신호를 이용한 결함진단시스템 및 결함진단방법 |
| JP5750066B2 (ja) * | 2012-02-13 | 2015-07-15 | 日立Geニュークリア・エナジー株式会社 | ガイド波を用いた非破壊検査方法 |
| WO2013183313A1 (ja) * | 2012-06-06 | 2013-12-12 | 日本電気株式会社 | 構造物の分析装置および構造物の分析方法 |
| JP2014122849A (ja) * | 2012-12-21 | 2014-07-03 | Jfe Steel Corp | 渦流探傷装置および渦流探傷方法 |
| JP6196532B2 (ja) * | 2013-11-05 | 2017-09-13 | 日本電産サンキョー株式会社 | エンコーダ |
| JP6289196B2 (ja) * | 2014-03-20 | 2018-03-07 | 原子燃料工業株式会社 | スイング逆止弁の診断方法 |
| KR101655214B1 (ko) * | 2014-10-02 | 2016-09-07 | 현대자동차 주식회사 | 프레스 판넬의 결함 검출 장치 및 그 방법 |
| JP6567268B2 (ja) * | 2014-11-18 | 2019-08-28 | 株式会社東芝 | 信号処理装置、サーバ装置、検知システム及び信号処理方法 |
| JP6674263B2 (ja) * | 2016-01-22 | 2020-04-01 | 東芝テック株式会社 | 変状検出装置 |
| JP6366826B2 (ja) * | 2016-05-17 | 2018-08-01 | 株式会社東芝 | 構造物評価システム、構造物評価装置及び構造物評価方法 |
| CN106092623B (zh) * | 2016-05-26 | 2019-04-30 | 东南大学 | 一种基于长标距刚度系数的桥梁损伤识别评估方法 |
| US10345275B2 (en) * | 2016-06-15 | 2019-07-09 | Kabushiki Kaisha Toshiba | Structure evaluation system, structure evaluation apparatus, and structure evaluation method |
| EP3719491A1 (en) * | 2016-06-15 | 2020-10-07 | Kabushiki Kaisha Toshiba | Structure evaluation system, structure evaluation device, and structure evaluation method |
| US10458954B2 (en) * | 2016-09-15 | 2019-10-29 | Kabushiki Kaisha Toshiba | Structure evaluation system, structure evaluation apparatus, and structure evaluation method |
| WO2018100507A1 (en) * | 2016-11-29 | 2018-06-07 | Microline Technology Corporation | Method and apparatus for vibroacoustic modulation crack detection and characterization of conduits |
| CN109642847B (zh) * | 2017-06-21 | 2021-05-25 | 株式会社东芝 | 构造物评价系统以及构造物评价方法 |
| JP6756927B2 (ja) * | 2018-02-27 | 2020-09-16 | 株式会社東芝 | 構造物評価システム及び構造物評価方法 |
| JP6857777B2 (ja) | 2018-09-13 | 2021-04-14 | 株式会社東芝 | 構造物評価システム、構造物評価装置及び構造物評価方法 |
-
2018
- 2018-09-13 JP JP2020508055A patent/JP6857777B2/ja active Active
- 2018-09-13 WO PCT/JP2018/034004 patent/WO2020054026A1/ja unknown
- 2018-09-13 CN CN201880055335.XA patent/CN111183358B/zh active Active
- 2018-09-13 EP EP18933584.7A patent/EP3851849A4/en active Pending
-
2021
- 2021-02-25 US US17/184,667 patent/US20210181157A1/en active Pending
- 2021-03-22 JP JP2021047844A patent/JP7222014B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004170397A (ja) * | 2002-10-28 | 2004-06-17 | Natl Inst For Land & Infrastructure Management Mlit | Aeセンサ及びaeセンサを用いた構造物の異常検出システム並びに安全性評価システム |
| JP2016217974A (ja) * | 2015-05-25 | 2016-12-22 | 三菱電機株式会社 | 測位精度評価装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3851849A1 (en) | 2021-07-21 |
| US20210181157A1 (en) | 2021-06-17 |
| JP2021096266A (ja) | 2021-06-24 |
| JPWO2020054026A1 (ja) | 2020-10-22 |
| EP3851849A4 (en) | 2022-05-04 |
| WO2020054026A1 (ja) | 2020-03-19 |
| JP6857777B2 (ja) | 2021-04-14 |
| CN111183358A (zh) | 2020-05-19 |
| JP7222014B2 (ja) | 2023-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111183358B (zh) | 构造物评价系统、构造物评价装置以及构造物评价方法 | |
| CN110418961B (zh) | 构造物评价系统以及构造物评价方法 | |
| CN113092592B (zh) | 构造物评价系统、构造物评价装置以及构造物评价方法 | |
| CN107850578B (zh) | 构造物评价系统、构造物评价装置及构造物评价方法 | |
| CN109642847B (zh) | 构造物评价系统以及构造物评价方法 | |
| US10345275B2 (en) | Structure evaluation system, structure evaluation apparatus, and structure evaluation method | |
| KR20080090850A (ko) | Ae 방법을 이용한 암반 파괴 판정 및 예측 시스템 | |
| JP7405161B2 (ja) | 構造物劣化検出システム、構造物劣化検出方法、及び構造物劣化検出装置 | |
| CN117723627A (zh) | 构造物评价系统、装置、方法以及非暂时性记录介质 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |