CN111133487B - 方法和装置 - Google Patents
方法和装置 Download PDFInfo
- Publication number
- CN111133487B CN111133487B CN201880063122.1A CN201880063122A CN111133487B CN 111133487 B CN111133487 B CN 111133487B CN 201880063122 A CN201880063122 A CN 201880063122A CN 111133487 B CN111133487 B CN 111133487B
- Authority
- CN
- China
- Prior art keywords
- event
- vehicle
- data
- database
- processors
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3833—Creation or updating of map data characterised by the source of data
- G01C21/3848—Data obtained from both position sensors and additional sensors
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/38—Electronic maps specially adapted for navigation; Updating thereof
- G01C21/3804—Creation or updating of map data
- G01C21/3807—Creation or updating of map data characterised by the type of data
- G01C21/3815—Road data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F16/00—Information retrieval; Database structures therefor; File system structures therefor
- G06F16/50—Information retrieval; Database structures therefor; File system structures therefor of still image data
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0129—Traffic data processing for creating historical data or processing based on historical data
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0141—Measuring and analyzing of parameters relative to traffic conditions for specific applications for traffic information dissemination
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/091—Traffic information broadcasting
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F7/00—Methods or arrangements for processing data by operating upon the order or content of the data handled
- G06F7/58—Random or pseudo-random number generators
- G06F7/588—Random number generators, i.e. based on natural stochastic processes
Abstract
本发明涉及一种用于产生和/或更新数字地图的至少一个子区域的数字模型的系统,所述系统在车辆侧具有:具有车辆侧的地图数据的车辆数据库,所述车辆侧的地图数据对数字地图的至少一个子区域进行成像;一个或者多个传感器,用于采集车辆环境数据;一个或者多个处理器,所述一个或者多个处理器配置为从车辆环境数据中产生至少一个片段,并且如果存在形式为在地图数据中的对象与所述片段中的对象之间的差的事件,则从所述片段中测定所述数字地图的所述子区域的更新数据;用于确定事件的空间位置的装置;发送和接收装置,所述发送和接收装置配置为,从后端装置接收具有针对随机数的种子的消息;其中所述一个或者多个处理器此外还配置为,基于所述种子产生随机数;其中发送和接收装置配置为,如果车辆侧的数据库关于事件的空间位置处于标准模式中,或者如果随机数超过确定的值,则向所述后端装置传送具有事件和相关的空间位置的更新数据。
Description
技术领域
本发明涉及驾驶辅助系统的领域。本发明特别是涉及通过车辆的传感器来采集(Erfassen)公路数据(Fahrwegdaten)以及向车辆外部的数据库传输所采集的公路数据。
技术背景
为了将在后端装置的数据库中的(例如针对自主驾驶或者半自主驾驶的)关于公路特性的数据保持为当前的,必须定期地使这些数据处于最新的状态。可以由在道路上行驶的车辆来执行公路特性的采集,所述车辆分别配备有合适的传感器和用于采集地理位置(Geo-Position)的设备。接着,可以经由车辆对X的通信或者移动无线电连接而向后端装置的数据库发送所采集的数据,在后端装置的数据库那里,所述数据被合并成数据记录,接着可以向另外的车辆发送所述数据记录,例如用于路线计算等。当向后端装置传送来自多个车辆的更新数据时,所采集的数据可能引起从车辆到后端装置的非常大的数据量(Datenaufkommen)。如果在后端装置中已经存在统计学上显著的、更新过的、被合并的数据记录,则这表示通信资源的浪费,因为可能无法通过经由进一步传输经过车辆采集的数据来实现被合并的数据记录的品质的进一步提高。
发明内容
因而,本发明的任务是给出一种用于产生或更新数字地图的数字模型的系统,该系统是可靠的并且安全地工作。
该任务利用根据系统独立权利要求所述的系统来解决。从属权利要求涉及特别的构建方案。
一个方面涉及一种用于产生和/或更新数字地图的至少一个子区域的数字模型的系统,其中进行双侧数据处理。数据处理的一部分在一个或者多个车辆中进行。数据处理的另一部分在后端装置中进行。在车辆侧,该系统具有车辆数据库,该车辆数据库具有车辆侧的地图数据,所述地图数据对数字地图的至少一个子区域进行成像,该数字地图也存储在后端装置中的服务器数据库中。此外,在车辆侧,该系统具有一个或者多个用于采集车辆环境数据的传感器,以及具有一个或者多个处理器,所述一个或者多个处理器配置为从车辆环境数据中产生至少一个片段(Snippet)。该片段是数字地图的局部模型(Teilmodell),所述局部模型包含车辆环境对象的对象数据。可以涉及例如100m x 100m大的地图部段的CAD(计算机辅助设计(computer aided design))模型,该模型例如从一系列摄像机图像中算出。此外,所述一个或者多个处理器配置为,如果出现形式为在地图数据中的对象与片段中的对象之间的差的事件,则从片段中测定数字地图的子区域的更新数据。该事件例如可以是新添加的车辆环境对象,如路障或者临时架设的路标。再者,在车辆侧存在用于确定事件的空间位置的装置,例如存在用于确定车辆位置的GPS接收器或者附加地用于确定事件相对于车辆的空间位置的雷达传感器。再者,在车辆侧设置有发送和接收装置,该发送和接收装置配置为,从后端装置接收种子(Seed),以产生随机数。所述一个或者多个此外还配置为,基于该种子来产生随机数。发送和接收装置此外还配置为:如果车辆侧的数据库相对于事件的空间位置处于标准模式,或者如果随机数超过确定的值,则向后端装置传送具有事件和相关的空间位置的更新数据。标准模式涉及车辆侧的数据库的如下状态:在所述状态中,关于车辆的确定的空间位置,在通过车辆首次探测到事件时,该车辆向车辆数据库传输更新数据。因此,在车辆数据库的标准模式中,事件在后端(Backend)中还不存在。
在后端侧,该系统具有后端装置。所述后端装置包含服务器数据库以及发送/接收装置,所述服务器数据库具有数字模型的后端侧的地图数据,所述发送/接收装置配置为,从一个或者多个车辆接收更新数据。此外,在后端装置中设置有一个或者多个处理器,所述一个或者多个处理器配置为,以统计学方式来评价更新数据,并且根据统计学评价来进行对后端侧的地图数据的更新,而且根据统计学评价来产生确定数目的正令牌(Token)和负令牌。在这种情况下,正令牌的数目可以选择为使得:通过由另外的车辆进行足够高次数的确认来验证该事件,以致在服务器数据库中仅产生或更新具有相对应高的置信度的数据。后端装置的发送和接收装置此外还配置为,向一个或者多个车辆传送正令牌或者负令牌。
存放在服务器数据库中的数字模型尤其是可以具有带有其他环境元素的高分辨率的数字地形图(Landkarte)。该数字地形图至少通过道路模型形成,该道路模型描述了路段和行车车道的走向,并且包含关于车道的数目和走向、弯道半径、坡度、交叉路口和类似特征的信息。
该数字模型尤其是可以包括其他静态的或者动态的环境元素。静态环境元素涉及:关于行车道标记和路标(比方说停车线、斑马线、中央分隔带、行车道边缘标记等)的位置和类型的信息;路边建筑物的存在,以及其类别和相对的或者绝对的位置;关于交通标志的位置和类型的信息;或者关于交通信号灯系统或者可变交通标志的类型和状态的信息。动态环境元素尤其是涉及车辆的位置和速度。对于环境元素的每个参数、尤其是位置和属性(例如交通标志的位置和交通标志的类型),在训练阶段的进程中,从统计学上显著的次数的测量中确定统计数据(Statistik)。该统计数据可以反映测量值围绕平均值的分布。
不仅可以在后端装置中关于测量次数(即通过车辆传输的次数)给更新数据分配显著值(Signifikanzwert),而且在车辆侧已经可以根据其品质来给更新数据分配置信度值或者统计学参数,所述置信度值或者统计学参数例如可以从车辆环境数据的质量得出。这样,尤其是当车辆环境数据是一系列摄像机图像时,车辆环境数据的质量在如雾和强降雨的恶劣天气条件下可能比在良好天气条件下更低。每个车辆的发送/接收装置可以配置为,除了更新数据之外,还向后端装置传送统计学参数或者在车辆侧确定的置信度值作为附加数据。
后端装置也可以仅以统计学方式来评价更新数据。后端装置的一个或者多个处理器可以配置为,依据已传送更新数据的车辆的数目和/或依据传送的次数来以统计学方式评价更新数据,并且基于车辆的数目和/或传送的次数给更新数据分配置信度值。
在这种情况下,后端装置可以将在车辆侧确定的附加数据一起包括在置信度值的确定中。依据已传送更新数据的车辆的数目和/或传送的次数,并且依据附加数据,后端装置的一个或者多个处理器可以评价更新数据。
该系统的一个方面涉及在后端装置中产生正令牌和负令牌。后端装置的一个或者多个处理器可以配置为,如果更新数据具有超过最小阈值的统计学显著性,则产生正令牌和负令牌,其中给正令牌和负令牌分配至少相关的事件的空间位置和相关的事件的事件ID。后端装置的发送/接收装置可以配置为,尤其是经由广播,向一个或者多个车辆传送正令牌和负令牌。
该系统的一个方面涉及对事件中止的探测的处理。只要事件中止要被评定为统计学上显著的,该事件中止就应导致:关于该事件,删除所有车辆中的全部正令牌和负令牌,并且关于该事件、即尤其是关于其空间位置,使车辆数据库恢复到标准模式。
一个或者多个车辆侧的处理器配置为,如果在地图数据中的对象与片段中的对象之间存在负的差,则探测到具有确定的空间位置和所分配的事件ID的事件的中止。车辆侧的发送/接收装置可以配置为:如果在车辆侧的存储器中存在负令牌,则以更新数据的形式向后端装置传送事件的中止。因此,仅仅如下车辆报告事件的中止:所述车辆的车辆数据库关于该事件具有负令牌。
后端装置的一个或者多个处理器可以配置为,如果更新数据具有超过最小阈值的统计学显著性,则产生如下消息:所述消息关于已中止的事件的空间位置和事件ID而使车辆侧的数据库置于标准模式中。后端装置的发送/接收装置可以配置为,向一个或者多个车辆传送消息。于是,一个或者多个车辆侧的处理器可以从车辆侧的存储器中去除关于空间位置和/或事件ID的正令牌或者负令牌,并且关于已中止的事件而使车辆数据库恢复到标准模式。
一个方面涉及在空间上将正令牌和负令牌分配给车辆。后端装置的发送和接收装置可以配置为,向一个或者多个如下车辆传送正令牌或者负令牌:所述车辆在空间上仅位于该事件附近。
一个方面涉及将更新过的后端侧的地图数据分配给车辆。为此,一个或者多个后端侧的处理器可以配置为,如果更新数据具有超过最小阈值的置信度值,则利用更新数据来更新具有数字模型的后端侧的地图数据的服务器数据库。后端侧的发送/接收装置可以配置为,向如下车辆传送至少更新过的数据库的涉及该事件的数据:所述车辆在空间上位于该事件附近。
附图说明
在下面,依据实施例参照附图来描述本发明。在附图中,
图1示出了用于产生数字模型的系统的方框电路图;和
图2示出了针对事件的出现的方法的流程图;和
图3示出了可替选的针对事件的出现的方法的流程图。
具体实施方式
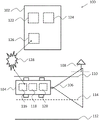
图1示出了用于产生和/或更新数字地图的数字模型的系统100,该系统包括后端装置102和具有传感器106的车辆104,该车辆104在通过两个车道110、112划界的、具有中央分隔带114的行车道上运动。车辆104具有发送/接收装置116,用于往返于后端装置102进行数据传输。后端装置102同样具有发送和接收装置126,用于往返于车辆104进行数据传输。一个安装在车辆104上的环境传感器106可以构造为摄像机,并且以车辆环境的一系列照片的形式来采集车辆环境数据,所述车辆环境数据包含交通标志108。环境传感器附加地可以构造为雷达传感器,并且可以配置为,借助雷达来扫描环境。以这种方式,雷达传感器106可以附加地确定环境元素(例如交通标志108)相对于车辆的空间位置的位置。再者,结合GPS模块(未示出)可以确定绝对空间位置。车辆此外具有处理器120,该处理器120配置为,从车辆环境数据中产生片段。片段是数字模型的大约100 x 100m大的部分,并且基本上表示对象建模。车辆104此外具有带有车辆侧的地图数据的车辆数据库118,所述地图数据对数字地图的至少一个子区域进行成像。处理器120配置为,将片段与来自车辆数据库118的相对应的车辆侧的地图数据进行比较,以便查明是否存在形式为在地图数据中的对象与片段中的对象之间的差的事件。在这种情况下,假设交通标志108还不存在于地图数据中,例如因为它不久前被架设。因此,该比较得出新架设的交通标志108作为事件。后端装置目前还不知道此事件,因为尚未经由通信网络向该后端装置传达该事件。
车辆104向后端装置102以更新数据的形式传送该事件,该后端装置102以此可以更新其具有数字模型的服务器侧的地图数据的服务器数据库122。该数字模型可以由如下片段组成:所述片段可以源自多个车辆。也可以涉及可参数化的环境模型。参数化可以在学习过程的进程中由统计学上显著的数目的车辆来进行。因此,经过参数化的环境模型表示了后端侧的被合并的车辆环境信息。环境元素的每个环境元素都可以具有自己的鉴于位置、属性和探测概率的统计数据。后端装置具有处理器124,该处理器124配置为,以统计学方式来评价更新数据,并且根据统计学评价来对服务器数据库122中的后端侧的地图数据进行更新。
假设多个车辆经过交通标志108。由于这些车辆中的每个车辆都将新架设的交通标志108探测为事件,所以如果每个车辆都会以更新数据的形式向后端装置102传达该事件,则在至后端装置102的上行链路中会产生非常大的数据量。因而,在下文中参照图2、图3和图4描述用于传达更新数据的基于令牌的协议。
图2示出了针对事件的出现的协议的流程图200。在默认模式中,对于数字地图的确定的空间区域,还不存在事件。车辆侧的数据库202包含服务器侧的数据库200的整个数字地图的选段(Ausschnitt)。服务器侧的数据库200包含环境模型、尤其是具有其他环境元素的高分辨率数字地形图。该数字地形图至少通过道路模型形成,该道路模型描述了路段和行车车道的走向,并且包含关于车道的数目和走向、弯道半径、坡度、交叉路口和类似特征的信息。环境模型尤其是可以包括其他静态环境元素。静态环境元素涉及:关于行车道标记和路标(比方说停车线、斑马线、中央分隔带、行车道边缘标记等)的位置和类型的信息;路边建筑物的存在,以及其类别和相对的或者绝对的位置;关于交通标志的位置和类型的信息;或者关于交通信号灯系统或者可变交通标志的类型和状态的信息。
车辆侧的传感器采集车辆环境数据,参见步骤204。通过一个或者多个车辆侧的处理器206,从车辆环境数据中计算片段。该片段包含交通标志108,参见图1,该交通标志不久前被架设。通过比较,即通过求得在车辆侧的数据库202中的对象与片段206中的对象之间的差,交通标志108被辨认为事件。在步骤210中测定:针对该事件,即针对该事件在其中已出现的空间区域,是否已接收到种子,以产生随机数。对于针对相对应的空间区域的车辆侧的数据库202在其中处于默认模式的空间区域,情况并非如此,因为还没有向后端传送该事件。在这种情况下,向后端装置传送事件308,并且在接收之后,该事件308在那里作为事件216存在。在后端侧,依据从可能不同的车辆传送该事件的次数,在步骤218中进行针对该事件的统计学评价。依据统计学评价,在步骤222中产生具有用于产生随机数的种子的消息。向车辆传送该具有种子的消息,在该车辆那里,在步骤224中在为此所配置的处理器中产生随机数。再者,在步骤218中的统计学评价的范围中,测定说明该事件多么值得信任的置信度值,并且在步骤220中,将该置信度值与阈值进行比较。如果比较的结果是置信度值超过阈值,则进行服务器侧的数据库224的更新。随着传送带有种子的消息,车辆侧的数据库从默认模式又进入事件模式,在该事件模式中,事件的传送根据借助种子产生的随机数进行。如果该事件在接收到该消息之后的预先确定的时间段之内不再存在,则向后端进行相对应的报告。因此,随着预先确定的时间段期满,车辆侧的数据库从事件模式转到默认模式。
在图3中示出了可替选的实施形式的协议的流程图。车辆侧的传感器采集车辆环境数据,参见步骤304。通过一个或者多个车辆侧的处理器,从车辆环境数据中计算片段306。片段306包含不久前被架设的交通标志108,参见图1。通过比较,即通过求得在车辆侧的数据库302中的对象与片段306中的对象之间的差,交通标志108被辨认为事件。在步骤310中测定,对于该事件,即对于该事件在其中已出现的空间区域,是否已接收到种子,以产生随机数。对于针对相对应的空间区域的车辆侧的数据库302在其中处于默认模式的空间区域,情况并非如此,因为还没有向后端传送该事件。在这种情况下,向后端装置传送事件308,并且在接收之后,该事件308作为事件316存在。在后端侧,依据从可能不同的车辆传送该事件的次数,在步骤318中进行针对该事件的统计学评价。依据统计学评价,在步骤322中产生带有到期时间的具有如下种子的消息:该种子用于产生随机数。向车辆传送该具有种子和到期时间的消息,在该车辆那里,在步骤324中在为此配置的处理器中产生随机数。可以借助广播来进行传送。为此,事件的空间位置被映射到无线电小区上,并且向相对应的无线电小区传送消息。
再者,在步骤318中的统计学评价的范围中,测定说明事件多么值得信任的置信度值,并在步骤320中,将该置信度值与阈值进行比较。如果比较的结果是置信度值超过阈值,则进行服务器侧的数据库324的更新。随着传送具有种子的消息,车辆侧的数据库从默认模式又进入事件模式,在该事件模式中,事件的传送根据借助种子产生的随机数进行。如果该事件在到期时间期满之后仍然存在,则在默认模式中将该事件当作新事件看待。因此,从所有车辆向后端传送该事件。为此目的,在步骤326中检查,是否已超过到期时间。如果情况如此,则与随机数是否超过阈值无关地,向后端传送事件。否则,仅仅车辆侧的数据库302被更新。
Claims (10)
1.一种用于产生和/或更新数字地图的至少一个子区域的数字模型的系统,所述系统在车辆侧具有:
具有车辆侧的地图数据的车辆数据库,所述车辆侧的地图数据对所述数字地图的至少一个子区域进行成像,
一个或者多个传感器,用于采集车辆环境数据;
一个或者多个处理器,所述一个或者多个处理器配置为:从所述车辆环境数据中产生至少一个片段;并且如果存在形式为在地图数据中的对象与所述片段中的对象之间的差的事件,则从所述片段中测定所述数字地图的所述子区域的更新数据;
用于确定所述事件的空间位置的装置;
发送和接收装置,所述发送和接收装置配置为,从后端装置接收具有针对随机数的种子的消息;
其中所述一个或者多个处理器此外还配置为,基于所述种子产生随机数;
其中所述发送和接收装置配置为,如果车辆侧的数据库关于所述事件的所述空间位置处于标准模式中,或者如果所述随机数超过确定的值,则向所述后端装置传送具有所述事件和相关的空间位置的所述更新数据;和
在后端侧,所述系统具有后端装置,所述后端装置具有:
服务器数据库,所述服务器数据库具有所述数字模型的后端侧的地图数据;
发送/接收装置,所述发送/接收装置配置为从一个或者多个车辆接收所述更新数据;
一个或者多个处理器,所述一个或者多个处理器配置为,对所述更新数据以统计学方式进行评价,并且根据统计学评价来产生所述种子,而且进行所述后端侧的地图数据的更新;和
其中所述发送和接收装置此外还配置为,向一个或者多个车辆传送所述种子。
2.根据权利要求1所述的系统,其中,所述后端装置的所述一个或者多个处理器配置为,依据已传送所述更新数据的车辆的数目和/或传送的次数,对所述更新数据以统计学方式进行评价,以及基于所述车辆的数目和/或所述传送的次数,给所述更新数据分配置信度值。
3.根据权利要求2所述的系统,其中,一个或者多个后端侧的处理器配置为:如果所述更新数据具有超过最小阈值的置信度值,则利用所述更新数据来更新具有所述数字模型的后端侧的地图数据的所述服务器数据库,并且其中,后端侧的发送/接收装置配置为,借助广播向车辆传输至少所述种子以及更新过的数据库的如下数据:所述数据涉及所述事件。
4.根据权利要求3所述的系统,其中,车辆侧的发送/接收装置配置为,传输具有所述事件的所述更新数据连带相关的时间戳,并且其中,所述后端侧的发送/接收装置配置为传输所述更新过的数据库的如下数据连带所述事件的所述时间戳:所述数据涉及所述事件。
5.根据权利要求4所述的系统,其中,一个或者多个车辆侧的处理器配置为,如果在所述地图数据中的对象与所述片段中的对象之间存在负的差,则探测到具有确定的空间位置和所分配的事件ID的所述事件的中止;
其中,所述车辆侧的发送/接收装置配置为,如果所述随机数超过一值并且从所述事件发生以来还没有超过预先给定的时间段,则以更新数据的形式向所述后端装置传送所述事件的中止;和
其中所述后端装置的所述一个或者多个处理器配置为,如果所述更新数据具有超过最小阈值的置信度值,则产生如下消息:所述消息关于已中止的所述事件的所述空间位置和所述事件ID而使所述车辆侧的数据库置于所述标准模式中;并且其中所述后端装置的所述发送/接收装置配置为,借助于广播向一个或者多个车辆传送所述消息。
6.根据权利要求5所述的系统,其中,所述一个或者多个车辆侧的处理器配置为,如果从所述事件发生以来已超过预先给定的时间段,则关于所述事件的所述空间位置而使所述车辆侧的数据库恢复到所述标准模式。
7.根据权利要求3所述的系统,其中,车辆侧的发送/接收装置配置为,传输具有所述事件的所述更新数据连带相关的时间戳,并且其中所述后端侧的发送/接收装置配置为,传输到期时间连带所述更新过的数据库的如下数据:所述数据涉及所述事件。
8.根据权利要求7所述的系统,其中,一个或者多个车辆侧的处理器配置为:如果在所述地图数据中的对象与所述片段中的对象之间存在负的差,则探测到具有确定的空间位置和所分配的事件ID的所述事件的中止;
其中,所述车辆侧的发送/接收装置配置为,如果所述随机数超过一值并且还没有超过所述到期时间,则以更新数据的形式向所述后端装置传送所述事件的中止;和
其中,所述后端装置的所述一个或者多个处理器配置为,如果所述更新数据具有超过最小阈值的置信度值,则产生如下消息:所述消息关于已中止的所述事件的所述空间位置和所述事件ID而使所述车辆侧的数据库置于所述标准模式中;并且其中所述后端装置的所述发送/接收装置配置为,借助广播向一个或者多个车辆传送所述消息。
9.根据权利要求8所述的系统,其中,所述一个或者多个车辆侧的处理器配置为,当已超过所述到期时间时,关于所述事件的所述空间位置而使所述车辆侧的数据库恢复到所述标准模式。
10.根据权利要求3至9中任一项所述的系统,其中,所述广播经由TMC或者LTE进行。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102017217299.1 | 2017-09-28 | ||
| DE102017217299.1A DE102017217299A1 (de) | 2017-09-28 | 2017-09-28 | Verfahren und Einrichtung |
| PCT/EP2018/076151 WO2019063630A1 (de) | 2017-09-28 | 2018-09-26 | Verfahren und einrichtung |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN111133487A CN111133487A (zh) | 2020-05-08 |
| CN111133487B true CN111133487B (zh) | 2022-01-25 |
Family
ID=63798954
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201880063122.1A Active CN111133487B (zh) | 2017-09-28 | 2018-09-26 | 方法和装置 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US20200256682A1 (zh) |
| EP (1) | EP3688737A1 (zh) |
| JP (1) | JP6918141B2 (zh) |
| KR (1) | KR102384443B1 (zh) |
| CN (1) | CN111133487B (zh) |
| DE (1) | DE102017217299A1 (zh) |
| WO (1) | WO2019063630A1 (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102016216335B4 (de) * | 2016-08-30 | 2020-12-10 | Continental Automotive Gmbh | System und Verfahren zur Analyse von Fahrtrajektorien für einen Streckenabschnitt |
| CN112579614A (zh) * | 2019-09-27 | 2021-03-30 | 北京百度网讯科技有限公司 | 地图数据的采集方法、装置、电子设备和介质 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE19513640C2 (de) | 1994-11-28 | 1997-08-07 | Mannesmann Ag | Verfahren zur Reduzierung einer aus den Fahrzeugen einer Fahrzeugflotte zu übertragenden Datenmenge |
| US6047234A (en) * | 1997-10-16 | 2000-04-04 | Navigation Technologies Corporation | System and method for updating, enhancing or refining a geographic database using feedback |
| US20080303693A1 (en) * | 2007-06-07 | 2008-12-11 | Link Ii Charles M | Methods and Systems for Automated Traffic Reporting |
| DE102008012661A1 (de) * | 2007-08-25 | 2009-02-26 | Continental Teves Ag & Co. Ohg | Aktualisierungseinheit und Verfahren zur Aktualisierung einer digitalen Karte |
| US9043138B2 (en) * | 2007-09-07 | 2015-05-26 | Green Driver, Inc. | System and method for automated updating of map information |
| US9304005B2 (en) * | 2009-12-04 | 2016-04-05 | GM Global Technology Operations LLC | Application programming interface (API) for navigation applications that merges incremental updates with existing map database |
| WO2013074897A1 (en) * | 2011-11-16 | 2013-05-23 | Flextronics Ap, Llc | Configurable vehicle console |
| DE102012208254A1 (de) * | 2012-05-16 | 2013-11-21 | Continental Teves Ag & Co. Ohg | Verfahren und System zur Erstellung eines aktuellen Situationsabbilds |
| US9143897B2 (en) * | 2012-11-05 | 2015-09-22 | Nokia Technologies Oy | Method and apparatus for providing an application engine based on real-time commute activity |
| DE102013205392A1 (de) * | 2013-03-27 | 2014-10-02 | Bayerische Motoren Werke Aktiengesellschaft | Backend für Fahrerassistenzsysteme |
| DE102014217847A1 (de) * | 2014-09-08 | 2016-03-10 | Conti Temic Microelectronic Gmbh | Fahrerassistenzsystem, Verkehrstelematiksystem und Verfahren zum Aktualisieren einer digitalen Karte |
| JP2016156973A (ja) | 2015-02-25 | 2016-09-01 | パイオニア株式会社 | 地図データ記憶装置、制御方法、プログラム及び記憶媒体 |
| JP5997797B2 (ja) * | 2015-03-03 | 2016-09-28 | 富士重工業株式会社 | 車両の地図データ処理装置 |
| DE102016205141A1 (de) * | 2015-11-04 | 2017-05-04 | Volkswagen Aktiengesellschaft | Verfahren und Fahrzeugkommunikationssystem zum Bestimmen einer Fahrintention für ein Fahrzeug |
| DE102016205543A1 (de) * | 2015-11-05 | 2017-05-11 | Continental Teves Ag & Co. Ohg | Verfahren und System zum Austauschen von Kartendaten in Abhängigkeit eines Gütemaßes |
| US10223380B2 (en) * | 2016-03-23 | 2019-03-05 | Here Global B.V. | Map updates from a connected vehicle fleet |
-
2017
- 2017-09-28 DE DE102017217299.1A patent/DE102017217299A1/de active Pending
-
2018
- 2018-09-26 JP JP2019559848A patent/JP6918141B2/ja active Active
- 2018-09-26 US US16/651,712 patent/US20200256682A1/en not_active Abandoned
- 2018-09-26 CN CN201880063122.1A patent/CN111133487B/zh active Active
- 2018-09-26 EP EP18783388.4A patent/EP3688737A1/de active Pending
- 2018-09-26 WO PCT/EP2018/076151 patent/WO2019063630A1/de unknown
- 2018-09-26 KR KR1020207012102A patent/KR102384443B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| WO2019063630A1 (de) | 2019-04-04 |
| JP6918141B2 (ja) | 2021-08-11 |
| JP2020518811A (ja) | 2020-06-25 |
| US20200256682A1 (en) | 2020-08-13 |
| KR102384443B1 (ko) | 2022-04-08 |
| DE102017217299A1 (de) | 2019-03-28 |
| EP3688737A1 (de) | 2020-08-05 |
| CN111133487A (zh) | 2020-05-08 |
| KR20200053610A (ko) | 2020-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111108538B (zh) | 用于生成和/或更新数字地图的数字模型的系统 | |
| CN105793669B (zh) | 车辆位置推定系统、装置、方法以及照相机装置 | |
| CN108986450B (zh) | 车辆环境感知方法、终端及系统 | |
| CN110880236B (zh) | 路况信息处理方法、装置及系统 | |
| JP2016095831A (ja) | 運転支援システム及びセンタ | |
| CN113706737B (zh) | 基于自动驾驶车辆的路面巡检系统及方法 | |
| JPWO2017212639A1 (ja) | 情報処理装置、計測装置及び制御方法 | |
| US20200286370A1 (en) | Transportation threat detection system | |
| EP3895950A1 (en) | Methods and systems for automated driving system monitoring and management | |
| US20220057230A1 (en) | Method For Checking Detected Changes To An Environmental Model Of A Digital Area Map | |
| CN110880235A (zh) | 路况信息处理系统中的路侧设备、处理方法及装置 | |
| CN111133487B (zh) | 方法和装置 | |
| CN111213032A (zh) | 用于对路线区段绘制地图的方法 | |
| CN115470884A (zh) | 用于自动驾驶系统的感知系统开发的平台 | |
| JP2021043475A (ja) | 送信装置、点群データ収集システムおよびコンピュータプログラム | |
| US20200057772A1 (en) | Method, Device, and System for Determining a Weather Area | |
| US20210323577A1 (en) | Methods and systems for managing an automated driving system of a vehicle | |
| JP2021073547A (ja) | 情報処理装置、計測装置及び制御方法 | |
| CN114760330B (zh) | 用于车联网的数据传输方法、装置、存储介质和系统 | |
| CN114363308B (zh) | 一种地图数据的传输方法及装置 | |
| CN106063257B (zh) | 用于管理交通信息的方法及机器可读的介质 | |
| WO2016072082A1 (ja) | 運転支援システム及びセンタ | |
| WO2022156352A1 (zh) | 地图更新方法、装置和计算机可读存储介质 | |
| CN116311163A (zh) | 车辆信息处理方法、装置及设备 | |
| CN115620420A (zh) | 地上物数据收集装置、地上物数据收集方法以及地上物数据收集用计算机程序 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| TR01 | Transfer of patent right |
Effective date of registration: 20230117 Address after: Hannover Patentee after: Continental Automotive Technology Co.,Ltd. Address before: Hannover Patentee before: CONTINENTAL AUTOMOTIVE GmbH |
|
| TR01 | Transfer of patent right |