CN108974169B - 一种电力电线杆爬杆机器人 - Google Patents
一种电力电线杆爬杆机器人 Download PDFInfo
- Publication number
- CN108974169B CN108974169B CN201810915183.8A CN201810915183A CN108974169B CN 108974169 B CN108974169 B CN 108974169B CN 201810915183 A CN201810915183 A CN 201810915183A CN 108974169 B CN108974169 B CN 108974169B
- Authority
- CN
- China
- Prior art keywords
- gear
- climbing
- rotating shaft
- rod
- connecting arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D57/00—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track
- B62D57/02—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members
- B62D57/024—Vehicles characterised by having other propulsion or other ground- engaging means than wheels or endless track, alone or in addition to wheels or endless track with ground-engaging propulsion means, e.g. walking members specially adapted for moving on inclined or vertical surfaces
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
本发明公开一种电力电线杆爬杆机器人,包括爬杆下体、爬杆上体、夹杆装置、减速机安装板、减速机、旋转板、输送机械手,爬杆上体滑动安装在爬杆下体的上方,减速机安装板固定安装在爬杆上体的上方,减速机固定安装在减速机安装板上,旋转板的轴头插入减速机的空心轴与其转动安装,输送机械手固定安装在旋转板上;本发明通过爬杆下体和爬杆上体以及夹杆装置来实现爬杆动作,通过输送机械手来调整云梯台与电线杆之间的距离和角度,避免了维修市政电线时占用车道造成交通压力,自动度较多,可以多角度调整位置,为电路维修提供了充足的便利条件。
Description
技术领域
本发明涉及市政电路维修保养技术领域,特别涉及一种电力电线杆爬杆机器人。
背景技术
随着社会的不断发展,电力的需求量越来越大,随之而来的电网检修工作也逐渐的增多,在电网检修工作中,需要很多维修工具,携带移动很不方便,检修过程中需要更换电线时需要从别处取来,非常麻烦,很多电力检修工作需要登高作业,而登高时需要至少两个人配合才能实现,且高处保护措施有限,维修人员的安全得不到保证,所以很多企业开始使用一些设备来完成此类工作,一般的电力维修辅助设备为电力维修车,如申请号为201610863243.7公布了一种《电力维修车》,主要包括车架、行走轮、驾驶位、收纳工具箱、升降支柱、承重平台和液压系统,此设备在电网检修时需要占用至少一条车道,很容易造成交通压力,给其他车辆的正常行驶带来不便,以此需要一种新型的电力检修辅助设备。
发明内容
针对上述问题,本发明提供一种电力电线杆爬杆机器人,通过爬杆下体和爬杆上体以及夹杆装置来实现爬杆动作,通过输送机械手来调整云梯台与电线杆之间的距离和角度,避免了维修市政电线时占用车道造成交通压力,自动度较多,可以多角度调整位置,为电路维修提供了充足的便利条件。
本发明所使用的技术方案是:一种电力电线杆爬杆机器人,包括爬杆下体、爬杆上体、夹杆装置、减速机安装板、减速机、旋转板、输送机械手,所述的爬杆上体滑动安装在爬杆下体的上方,减速机安装板固定安装在爬杆上体的上方,减速机固定安装在减速机安装板上,旋转板的轴头插入减速机的空心轴与其转动安装,输送机械手固定安装在旋转板上。
所述的爬杆下体包括下架体、光轴、直线轴承、圆柱齿条、第一气缸安装架、第一气缸、齿轮支架、第一转轴、第一轴承、大齿轮、方形齿条,所述的直线轴承固定安装在下架体的两侧,圆柱齿条穿过直线轴承与其滑动安装,两根方形齿条固定安装在下架体上方两根立柱的内侧,两个第一气缸安装架分别固定安装在下架体的两侧,第一气缸固定在第一气缸安装架上,齿轮支架固定安装在第一气缸的气缸杆端头,第一转轴两端与齿轮支架两侧固定,第一轴承嵌入大齿轮并与其一并转动安装在第一转轴上,大齿轮与圆柱齿条和方形齿条相互啮合。
所述的爬杆上体包括上架体、直线轴承,所述的三个直线轴承其中一个固定安装在上架体中间的横梁上,另外两个直线轴承固定安装在上架体底侧横梁的两端。
所述的夹杆装置包括第二气缸安装架、第二气缸、推杆、第二转轴、第二轴承、连杆、第三转轴、夹爪,所述的第二气缸安装架固定在下架体和上架体上,第二气缸固定在第二气缸安装架上,推杆与第二气缸的气缸杆端头固定安装,连杆两端嵌入第二转轴,其中一端通过第二转轴与推杆转动安装,另一端与第三转轴转动安装,夹爪固定安装在第三转轴的两端。
所述的输送机械手包括安装座、销轴、第一齿轮、第二齿轮、第一电机、第一连臂、第二电机、第三齿轮、第四齿轮、第四转轴、第二连臂、第三电机、第五齿轮、第六齿轮、第五转轴、云梯台,所述的第一连臂的底部通过销轴与安装座转动安装,第一齿轮与第一连臂固定安装,第一电机固定在第一连臂的底部,第二齿轮与第一电机的伸出轴固定安装并与第一齿轮啮合,第四转轴与第一连臂的顶部转动安装,与第二连臂底部固定安装,第四齿轮与第四转轴固定安装,第二电机固定在第一连臂顶部,第三齿轮与第二电机的伸出轴固定安装并与第四齿轮啮合,第五转轴与第二连臂转动安装,与第六齿轮和云梯台固定安装,第三电机固定在第二连臂的顶部,第五齿轮与第三电机的伸出轴固定安装并与第六齿轮啮合。
本发明有益效果:(1)本发明模仿人体爬杆动作进行设计,在维修市政电线时可以避免占用道路,减轻了交通压力,且所占空间也较小;(2)本发明的输送机械手拥有较多自由度,可以任意调整位置和角度,大大方便了电工对电路的维修。
附图说明
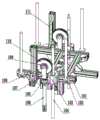
图1为本发明的整体结构示意图。
图2为本发明的爬杆机构整体结构示意图。
图3为本发明的爬杆下体结构示意图。
图4为本发明的爬杆上体结构示意图。
图5为本发明的夹杆装置结构示意图。
图6为本发明的输送机械手结构示意图。
附图标号:1-爬杆下体;2-爬杆上体;3-夹杆装置;4-减速机安装板;5-减速机;6-旋转板;7-输送机械手;101-下架体;102-光轴;103-直线轴承;104-圆柱齿条;105-第一气缸安装架;106-第一气缸;107-齿轮支架;108-第一转轴;109-第一轴承;110-大齿轮;111-方形齿条;201-上架体;301-第二气缸安装架;302-第二气缸;303-推杆;304-第二转轴;305-第二轴承;306-连杆;307-第三转轴;308-夹爪;701-安装座;702-销轴;703-第一齿轮;704-第二齿轮;705-第一电机;706-第一连臂;707-第二电机;708-第三齿轮;709-第四齿轮;710-第四转轴;711-第二连臂;712-第三电机;713-第五齿轮;714-第六齿轮;715-第五转轴;716-云梯台。
具体实施方式
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
如图1、图2、图3、图4、图5、图6所示的一种电力电线杆爬杆机器人,包括爬杆下体1、爬杆上体2、夹杆装置3、减速机安装板4、减速机5、旋转板6、输送机械手7,爬杆上体2滑动安装在爬杆下体1的上方,减速机安装板4固定安装在爬杆上体2的上方,减速机5固定安装在减速机安装板4上,旋转板6的轴头插入减速机5的空心轴与其转动安装,输送机械手7固定安装在旋转板6上。
爬杆下体1包括下架体101、光轴102、直线轴承103、圆柱齿条104、第一气缸安装架105、第一气缸106、齿轮支架107、第一转轴108、第一轴承109、大齿轮110、方形齿条111,直线轴承103固定安装在下架体101的两侧,圆柱齿条104穿过直线轴承103与其滑动安装,两根方形齿条111固定安装在下架体101上方两根立柱的内侧,两个第一气缸安装架105分别固定安装在下架体101的两侧,第一气缸106固定在第一气缸安装架105上,齿轮支架107固定安装在第一气缸106的气缸杆端头,第一转轴108两端与齿轮支架107两侧固定,第一轴承109嵌入大齿轮110并与其一并转动安装在第一转轴108上,大齿轮110与圆柱齿条104和方形齿条111相互啮合。
爬杆上体2包括上架体201、直线轴承103,三个直线轴承103其中一个固定安装在上架体201中间的横梁上,另外两个直线轴承103固定安装在上架体201底侧横梁的两端。
夹杆装置3包括第二气缸安装架301、第二气缸302、推杆303、第二转轴304、第二轴承305、连杆306、第三转轴307、夹爪308,第二气缸安装架301固定在下架体101和上架体201上,第二气缸302固定在第二气缸安装架301上,推杆303与第二气缸302的气缸杆端头固定安装,连杆306两端嵌入第二转轴304,其中一端通过第二转轴304与推杆303转动安装,另一端与第三转轴307转动安装,夹爪308固定安装在第三转轴307的两端。
输送机械手7包括安装座701、销轴702、第一齿轮703、第二齿轮704、第一电机705、第一连臂706、第二电机707、第三齿轮708、第四齿轮709、第四转轴710、第二连臂711、第三电机712、第五齿轮713、第六齿轮714、第五转轴715、云梯台716,第一连臂706的底部通过销轴702与安装座701转动安装,第一齿轮703与第一连臂706固定安装,第一电机705固定在第一连臂706的底部,第二齿轮704与第一电机705的伸出轴固定安装并与第一齿轮703啮合,第四转轴710与第一连臂706的顶部转动安装,与第二连臂711底部固定安装,第四齿轮709与第四转轴710固定安装,第二电机707固定在第一连臂706顶部,第三齿轮708与第二电机707的伸出轴固定安装并与第四齿轮709啮合,第五转轴715与第二连臂711转动安装,与第六齿轮714和云梯台716固定安装,第三电机712固定在第二连臂711的顶部,第五齿轮713与第三电机712的伸出轴固定安装并与第六齿轮714啮合。
本发明的工作原理:初始状态时爬杆下体1和爬杆上体2是收缩到一起的,且两个夹杆装置3都夹紧电线杆,当开始爬杆是,爬杆上体2的夹杆装置3开始工作,第二气缸302伸出通过连杆306使得两个夹爪308张开,然后第一气缸106伸出通过大齿轮110和方形齿条111使得圆柱齿条104向上运动从而使得爬杆上体2向上运动,此时爬杆上体2上的第二气缸302收缩通过连杆306使得两个夹爪308闭合夹紧电线杆,爬杆下体1上的第二气缸302伸出通过连杆306使得两个夹爪308张开,然后第一气缸106收缩通过大齿轮110和圆柱齿条104使得方形齿条111向上运动从而使得爬杆下体1向上运动,此时爬杆下体1上的第二气缸302收缩通过连杆306使得两个夹爪308闭合夹紧电线杆,如此循环往复实现爬杆动作;减速机5工作通过旋转板6带动输送机械手7在电线杆的圆周方向转动以调整云梯台716与电线杆的合适位置,第一电机705工作带动第一齿轮703转动从而带动与其啮合的第二齿轮704转动,第二齿轮704转动带动第一连臂706转动,同样的第二电机707工作带动第三齿轮708转动从而带动与其啮合的第四齿轮709转动,第四齿轮709转动带动第四转轴710转动从而带动第二连臂711转动,以此来调整云梯台716与电线杆的距离,第三电机712工作带动第五齿轮713转动从而带动与其啮合的第六齿轮714转动,第六齿轮714转动带动第五转轴715转动从而带动云梯台716转动,以此来调整云梯台716的角度。
Claims (1)
1.一种电力电线杆爬杆机器人,包括爬杆下体(1)、爬杆上体(2)、夹杆装置(3)、减速机安装板(4)、减速机(5)、旋转板(6)、输送机械手(7),其特征在于:所述的爬杆上体(2)滑动安装在爬杆下体(1)的上方,减速机安装板(4)固定安装在爬杆上体(2)的上方,减速机(5)固定安装在减速机安装板(4)上,旋转板(6)的轴头插入减速机(5)的空心轴与其转动安装,输送机械手(7)固定安装在旋转板(6)上;
所述的爬杆下体(1)包括下架体(101)、光轴(102)、直线轴承(103)、圆柱齿条(104)、第一气缸安装架(105)、第一气缸(106)、齿轮支架(107)、第一转轴(108)、第一轴承(109)、大齿轮(110)、方形齿条(111),所述的直线轴承(103)固定安装在下架体(101)的两侧,圆柱齿条(104)穿过直线轴承(103)与其滑动安装,两根方形齿条(111)固定安装在下架体(101)上方两根立柱的内侧,两个第一气缸安装架(105)分别固定安装在下架体(101)的两侧,第一气缸(106)固定在第一气缸安装架(105)上,齿轮支架(107)固定安装在第一气缸(106)的气缸杆端头,第一转轴(108)两端与齿轮支架(107)两侧固定,第一轴承(109)嵌入大齿轮(110)并与其一并转动安装在第一转轴(108)上,大齿轮(110)与圆柱齿条(104)和方形齿条(111)相互啮合;
所述的爬杆上体(2)包括上架体(201)、直线轴承(103),三个所述的直线轴承(103)其中一个固定安装在上架体(201)中间的横梁上,另外两个直线轴承(103)固定安装在上架体(201)底侧横梁的两端;
所述的夹杆装置(3)包括第二气缸安装架(301)、第二气缸(302)、推杆(303)、第二转轴(304)、第二轴承(305)、连杆(306)、第三转轴(307)、夹爪(308),所述的第二气缸安装架(301)固定在下架体(101)和上架体(201)上,第二气缸(302)固定在第二气缸安装架(301)上,推杆(303)与第二气缸(302)的气缸杆端头固定安装,连杆(306)两端嵌入第二转轴(304),其中一端通过第二转轴(304)与推杆(303)转动安装,另一端与第三转轴(307)转动安装,夹爪(308)固定安装在第三转轴(307)的两端;
所述的输送机械手(7)包括安装座(701)、销轴(702)、第一齿轮(703)、第二齿轮(704)、第一电机(705)、第一连臂(706)、第二电机(707)、第三齿轮(708)、第四齿轮(709)、第四转轴(710)、第二连臂(711)、第三电机(712)、第五齿轮(713)、第六齿轮(714)、第五转轴(715)、云梯台(716),所述的第一连臂(706)的底部通过销轴(702)与安装座(701)转动安装,第一齿轮(703)与第一连臂(706)固定安装,第一电机(705)固定在第一连臂(706)的底部,第二齿轮(704)与第一电机(705)的伸出轴固定安装并与第一齿轮(703)啮合,第四转轴(710)与第一连臂(706)的顶部转动安装,与第二连臂(711)底部固定安装,第四齿轮(709)与第四转轴(710)固定安装,第二电机(707)固定在第一连臂(706)顶部,第三齿轮(708)与第二电机(707)的伸出轴固定安装并与第四齿轮(709)啮合,第五转轴(715)与第二连臂(711)转动安装,与第六齿轮(714)和云梯台(716)固定安装,第三电机(712)固定在第二连臂(711)的顶部,第五齿轮(713)与第三电机(712)的伸出轴固定安装并与第六齿轮(714)啮合。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810915183.8A CN108974169B (zh) | 2018-08-13 | 2018-08-13 | 一种电力电线杆爬杆机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201810915183.8A CN108974169B (zh) | 2018-08-13 | 2018-08-13 | 一种电力电线杆爬杆机器人 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108974169A CN108974169A (zh) | 2018-12-11 |
| CN108974169B true CN108974169B (zh) | 2021-08-20 |
Family
ID=64553104
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201810915183.8A Active CN108974169B (zh) | 2018-08-13 | 2018-08-13 | 一种电力电线杆爬杆机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN108974169B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109968315B (zh) * | 2019-04-02 | 2022-11-11 | 亿智越智能科技(武汉)有限公司 | 一种饮水机桶装水运输更换机器人 |
| CN111976858B (zh) * | 2020-08-31 | 2022-04-15 | 国家电网有限公司 | 一种电力抢险辅助攀高机器人 |
| CN115245918A (zh) * | 2022-07-12 | 2022-10-28 | 中山大学 | 一种用于大型天线的仿生蠕动式清洁机器人 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3239252B2 (ja) * | 1994-04-01 | 2001-12-17 | 中部電力株式会社 | 高所における重量物ハンドリング装置 |
| CN102689308B (zh) * | 2012-01-04 | 2014-06-11 | 河南科技大学 | 一种机械手爬杆器 |
| CN105253213A (zh) * | 2015-10-27 | 2016-01-20 | 昆明理工大学 | 一种爬杆机器人 |
| CN106112993B (zh) * | 2016-08-22 | 2018-02-06 | 常州信息职业技术学院 | 一种交替式爬杆机器人 |
| CN106737621B (zh) * | 2016-12-30 | 2019-12-13 | 河南理工大学 | 一种利用辅助杆爬杆的复合型机器人 |
| CN207189651U (zh) * | 2017-04-20 | 2018-04-06 | 深圳市朗驰欣创科技股份有限公司 | 爬杆机器人 |
-
2018
- 2018-08-13 CN CN201810915183.8A patent/CN108974169B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN108974169A (zh) | 2018-12-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN108974169B (zh) | 一种电力电线杆爬杆机器人 | |
| CN111085578B (zh) | 一种全智能汽车制动硬管加工装置 | |
| CN109175507A (zh) | 一种用于加工铝合金板材的切割装置 | |
| CN102941567A (zh) | 高压输电线路巡线及作业机器人驱动臂 | |
| CN109510102B (zh) | 一种电动和手动相结合的两分裂导线出线作业平台 | |
| CN103586680A (zh) | 一种用于垂直装配的平衡臂机构及其调整方法 | |
| CN204770288U (zh) | 一种冲压机辅助机械手 | |
| CN203579153U (zh) | 一种用于垂直装配的平衡臂机构 | |
| CN104907438A (zh) | 一种冲压机辅助机械手 | |
| CN112398293B (zh) | 一种电机组装机及方法 | |
| CN210758483U (zh) | 一种自平衡自适应石材锯切装置 | |
| CN107700330A (zh) | 一种公路标线自动绘制机 | |
| CN203865667U (zh) | 具有消静电功能的电子薄膜收卷装置 | |
| CN215935009U (zh) | 一种电缆巡检装置 | |
| CN202935465U (zh) | 高压输电线路巡线及作业机器人驱动臂 | |
| CN210297106U (zh) | 一种电力工程用的线缆固定装置 | |
| CN113746026A (zh) | 一种安全性高的电力维修用导线飞车 | |
| CN202753670U (zh) | 适用于大型雕刻物的立体雕刻机 | |
| CN202170419U (zh) | 一种应用于绣花机绣框y方向的驱动装置 | |
| CN111842715A (zh) | 一种钢丝生产用自动校直装置 | |
| CN213505313U (zh) | 手动绕线机的定位工装 | |
| CN219041224U (zh) | 一种电缆损耗检修工具 | |
| CN214899903U (zh) | 一种电缆桥架支架 | |
| CN205272013U (zh) | 新型旋转组合工作台手臂 | |
| CN205309429U (zh) | 一种轴向可固定的钢管剪切装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| TA01 | Transfer of patent application right | ||
| TA01 | Transfer of patent application right |
Effective date of registration: 20210730 Address after: 341600 second floor, office building 1a, 5g Industrial Park, Xinfeng County, Ganzhou City, Jiangxi Province Applicant after: Jiangxi Tangju Technology Co.,Ltd. Address before: 300401 Xiping Road, Beichen District, Tianjin Applicant before: Xing Zhiping |
|
| GR01 | Patent grant | ||
| GR01 | Patent grant |