CN107548331B - 带有减小的电气噪声的电动工具马达 - Google Patents
带有减小的电气噪声的电动工具马达 Download PDFInfo
- Publication number
- CN107548331B CN107548331B CN201680027409.XA CN201680027409A CN107548331B CN 107548331 B CN107548331 B CN 107548331B CN 201680027409 A CN201680027409 A CN 201680027409A CN 107548331 B CN107548331 B CN 107548331B
- Authority
- CN
- China
- Prior art keywords
- drop arm
- housing
- assembly
- gear
- arm assembly
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000002829 reductive effect Effects 0.000 title description 8
- 239000012811 non-conductive material Substances 0.000 claims abstract description 17
- 239000004033 plastic Substances 0.000 claims description 21
- 229920003023 plastic Polymers 0.000 claims description 21
- 238000006243 chemical reaction Methods 0.000 description 24
- 238000004891 communication Methods 0.000 description 16
- 239000000428 dust Substances 0.000 description 13
- 230000033001 locomotion Effects 0.000 description 13
- 125000006850 spacer group Chemical group 0.000 description 13
- 239000000463 material Substances 0.000 description 12
- 229910052751 metal Inorganic materials 0.000 description 12
- 239000002184 metal Substances 0.000 description 12
- 230000001681 protective effect Effects 0.000 description 12
- 238000002955 isolation Methods 0.000 description 9
- 239000004020 conductor Substances 0.000 description 8
- 230000006378 damage Effects 0.000 description 7
- 238000010348 incorporation Methods 0.000 description 7
- 229910052782 aluminium Inorganic materials 0.000 description 6
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 6
- 238000000034 method Methods 0.000 description 6
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 5
- 229910052799 carbon Inorganic materials 0.000 description 5
- 230000005484 gravity Effects 0.000 description 5
- 230000036961 partial effect Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 230000004913 activation Effects 0.000 description 4
- 238000001994 activation Methods 0.000 description 4
- 230000008878 coupling Effects 0.000 description 4
- 238000010168 coupling process Methods 0.000 description 4
- 238000005859 coupling reaction Methods 0.000 description 4
- 239000003562 lightweight material Substances 0.000 description 4
- 238000004663 powder metallurgy Methods 0.000 description 4
- 230000009467 reduction Effects 0.000 description 4
- 229910000760 Hardened steel Inorganic materials 0.000 description 3
- 230000009471 action Effects 0.000 description 3
- 238000011068 loading method Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012546 transfer Methods 0.000 description 3
- 208000027418 Wounds and injury Diseases 0.000 description 2
- 230000004888 barrier function Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000000576 coating method Methods 0.000 description 2
- 230000005611 electricity Effects 0.000 description 2
- 230000006870 function Effects 0.000 description 2
- 238000002347 injection Methods 0.000 description 2
- 239000007924 injection Substances 0.000 description 2
- 208000014674 injury Diseases 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000008188 pellet Substances 0.000 description 2
- 239000006223 plastic coating Substances 0.000 description 2
- 229920002451 polyvinyl alcohol Polymers 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- KJLPSBMDOIVXSN-UHFFFAOYSA-N 4-[4-[2-[4-(3,4-dicarboxyphenoxy)phenyl]propan-2-yl]phenoxy]phthalic acid Chemical group C=1C=C(OC=2C=C(C(C(O)=O)=CC=2)C(O)=O)C=CC=1C(C)(C)C(C=C1)=CC=C1OC1=CC=C(C(O)=O)C(C(O)=O)=C1 KJLPSBMDOIVXSN-UHFFFAOYSA-N 0.000 description 1
- 229910000831 Steel Inorganic materials 0.000 description 1
- HCHKCACWOHOZIP-UHFFFAOYSA-N Zinc Chemical compound [Zn] HCHKCACWOHOZIP-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000002048 anodisation reaction Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 229910010293 ceramic material Inorganic materials 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000005336 cracking Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 238000004512 die casting Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000001125 extrusion Methods 0.000 description 1
- 238000010304 firing Methods 0.000 description 1
- 210000002683 foot Anatomy 0.000 description 1
- 239000003292 glue Substances 0.000 description 1
- CPSYWNLKRDURMG-UHFFFAOYSA-L hydron;manganese(2+);phosphate Chemical compound [Mn+2].OP([O-])([O-])=O CPSYWNLKRDURMG-UHFFFAOYSA-L 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 150000002739 metals Chemical class 0.000 description 1
- 239000002991 molded plastic Substances 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000037361 pathway Effects 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 230000000452 restraining effect Effects 0.000 description 1
- 230000000717 retained effect Effects 0.000 description 1
- 239000005060 rubber Substances 0.000 description 1
- 238000006748 scratching Methods 0.000 description 1
- 230000002393 scratching effect Effects 0.000 description 1
- 238000007493 shaping process Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 229920001187 thermosetting polymer Polymers 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 210000003371 toe Anatomy 0.000 description 1
- 238000013024 troubleshooting Methods 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
- 239000011701 zinc Substances 0.000 description 1
- 229910052725 zinc Inorganic materials 0.000 description 1
Images

































































Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D59/00—Accessories specially designed for sawing machines or sawing devices
- B23D59/001—Measuring or control devices, e.g. for automatic control of work feed pressure on band saw blade
- B23D59/002—Measuring or control devices, e.g. for automatic control of work feed pressure on band saw blade for the position of the saw blade
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D45/00—Sawing machines or sawing devices with circular saw blades or with friction saw discs
- B23D45/06—Sawing machines or sawing devices with circular saw blades or with friction saw discs with a circular saw blade arranged underneath a stationary work-table
- B23D45/065—Sawing machines or sawing devices with circular saw blades or with friction saw discs with a circular saw blade arranged underneath a stationary work-table with the saw blade carried by a pivoted lever
- B23D45/067—Sawing machines or sawing devices with circular saw blades or with friction saw discs with a circular saw blade arranged underneath a stationary work-table with the saw blade carried by a pivoted lever the saw blade being adjustable according to depth or angle of cut
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D47/00—Sawing machines or sawing devices working with circular saw blades, characterised only by constructional features of particular parts
- B23D47/08—Sawing machines or sawing devices working with circular saw blades, characterised only by constructional features of particular parts of devices for bringing the circular saw blade to the workpiece or removing same therefrom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D47/00—Sawing machines or sawing devices working with circular saw blades, characterised only by constructional features of particular parts
- B23D47/12—Sawing machines or sawing devices working with circular saw blades, characterised only by constructional features of particular parts of drives for circular saw blades
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23D—PLANING; SLOTTING; SHEARING; BROACHING; SAWING; FILING; SCRAPING; LIKE OPERATIONS FOR WORKING METAL BY REMOVING MATERIAL, NOT OTHERWISE PROVIDED FOR
- B23D59/00—Accessories specially designed for sawing machines or sawing devices
- B23D59/006—Accessories specially designed for sawing machines or sawing devices for removing or collecting chips
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B27—WORKING OR PRESERVING WOOD OR SIMILAR MATERIAL; NAILING OR STAPLING MACHINES IN GENERAL
- B27G—ACCESSORY MACHINES OR APPARATUS FOR WORKING WOOD OR SIMILAR MATERIALS; TOOLS FOR WORKING WOOD OR SIMILAR MATERIALS; SAFETY DEVICES FOR WOOD WORKING MACHINES OR TOOLS
- B27G19/00—Safety guards or devices specially adapted for wood saws; Auxiliary devices facilitating proper operation of wood saws
- B27G19/02—Safety guards or devices specially adapted for wood saws; Auxiliary devices facilitating proper operation of wood saws for circular saws
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Wood Science & Technology (AREA)
- Forests & Forestry (AREA)
- Sawing (AREA)
Abstract
一种电动工具组件,包括可旋转地支撑刀轴并且能够在第一垂臂位置和第二垂臂位置之间运动的垂臂组件;配置成当所述垂臂组件处于所述第一垂臂组件位置时将力传递到所述垂臂组件的致动装置;控制系统,其被配置为当感测到不安全状况时控制所述致动装置将力传递到所述垂臂组件;马达,其通过齿轮可操作地连接到所述刀轴;以及装纳所述齿轮的齿轮壳体,所述齿轮壳体由非传导性材料形成。
Description
相关申请的交叉引用
本申请要求2015年三月12日提交的名称为“TABLE SAW WITH DROPPING BLADE”的美国临时申请序列No. 62/132,004和2015年三月12日提交的名称为“SYSTEM AND METHODFOR CONTROL OF A DROP ARM IN A TABLE SAW”的美国临时申请序列No. 62/131,977的优先权,所述文献中的每一个的公开内容均通过引用以其整体并入本文。
技术领域
本公开涉及电动工具,且更具体地涉及带有暴露的成形装置的电动工具。
背景技术
已经产生若干电动工具以促进将工件形成为期望的形状。一种此类电动工具是台锯。多种多样的台锯可用于多种用途。诸如柜式台锯的一些台锯非常重,且相对固定不变。有时被称为工作现场台锯的其他台锯相对轻。工作现场台锯因此是便携的,使得工人能够将台锯定位在工作现场。在将台锯制得充分轻以移动时,通常牺牲一些精度。然而,将台锯定位在工作现场的便利使得在诸如一般建造工程的应用中非常期望工作现场台锯。
由于台锯的锯片通常非常锋利且以高速率运动,因此所有台锯,包括柜式台锯和工作现场台锯,都存在安全隐患。相应地,诸如割断的趾和深撕裂的严重伤害可能几乎瞬间发生。响应于以高速运动的暴露刀片中固有的危险,已经针对台锯研发了若干不同的安全系统。一种这样的安全系统是锯片护罩。锯片护罩活动地围封锯片,因此提供必须在暴露旋转锯片之前去除的物理屏障。虽然锯片护罩有效地防止一些伤害,但是或者为使用台锯的便利,或者由于锯片护罩不与和具体成形装置一起使用相容,锯片护罩可能被用户移除。举例而言,锯片护罩通常不与开槽(dado)刀片相容,且当执行非贯通切割时,通常必须移除锯片护罩。
也已经研发了台锯安全系统,其旨在当用户的手接近或触及刀片时制动刀片。已经研发了各种制动装置,包括被物理地插入刀片的齿内的制动装置。然而,在致动这种类型的制动装置时,由于制动构件,通常毁坏刀片。此外,通常损坏制动构件。相应地,每次致动安全装置,均必须花费相当多的资源来替换刀片和制动构件。这种类型的安全装置的另一缺点在于,成形装置必须是有齿的。此外,如果备用的刀片和制动构件不在手边,则用户必须行进至商店以获得替换物。因此,这种类型的安全系统能够是昂贵和不方便的。
另一种类型的台锯使用安全控制系统,其响应于感测到的不安全状况,使刀片运动至工作台的水平下方。一种这样的系统在2012年十月16日授权的美国专利No. 8,286,537中公开。'537专利公开了一种电动工具,其包括工件支撑表面、能够沿第一摆动臂位置和第二摆动臂位置之间的摆动路径运动的摆动臂组件和可在第一位置和第二位置之间运动的闩锁销,其中在第一摆动臂位置处,由摆动臂组件支撑的成形装置的一部分在工件支撑表面上方延伸,在第二摆动臂位置处,成形装置的该部分不在工件支撑表面上方延伸,并且在第一位置处,闩锁销与摆动臂组件接合,在第二位置处,闩锁不与摆动臂组件接合。
大体地,'537专利中的电动工具以已知的方式操作,直到由安全控制系统感测到不安全状况为止。响应于感测到的不安全状况,安全控制系统控制压力操作的致动器,以将闩锁销从第一位置迫动至第二位置,且迫使摆动臂组件远离第一摆动臂位置且朝向第二摆动臂位置。
上文描述的安全控制系统在降低不安全状况的可能性方面是有效的,然而,系统的有效性取决于准确地确定不安全状况存在。系统精确地确定不安全状况存在的能力受到系统中的任何电气噪声的妨碍。
鉴于前述内容,提供具有减小的噪声环境的感测系统和垂臂组件的电动工具将是有利的。
发明内容
在一个实施例中,电动工具组件包括可旋转地支撑刀轴并且能够在第一垂臂位置和第二垂臂位置之间运动的垂臂组件,配置成当垂臂组件处于第一垂臂组件位置时将力传递到垂臂组件的致动装置;控制系统,其被配置为当感测到不安全状况时控制致动装置以将力传递到垂臂组件;马达,其通过齿轮可操作地连接到刀轴;以及装纳齿轮的齿轮壳体,所述齿轮壳体由非传导性材料形成。
在一个或多个实施例中,齿轮壳体在安装在马达的动力轴上的风扇上延伸。
在一个或多个实施例中,所述动力轴限定动力轴轴线,并且所述齿轮壳体还包括多个径向通风口,所述径向通风口配置成从所述轴线径向向外地排出由所述风扇驱动的空气。
在一个或多个实施例中,所述非传导性材料是塑料。
在一个或多个实施例中,所述电动工具组件包括偏移驱动轴,所述偏移驱动轴通过所述齿轮可操作地连接到所述动力轴并且至少部分地位于所述齿轮壳体内,以及至少一个第一轴承,所述至少一个第一轴承旋转地支撑所述偏移驱动轴且位于所述齿轮壳体内。
在一个或多个实施例中,电动工具组件包括将齿轮封闭在齿轮壳体内的盖板,所述盖板由非传导性材料制成。
在一个或多个实施例中,所述电动工具组件包括至少一个第二轴承,所述至少一个第二轴承旋转地支撑所述偏移驱动轴,所述至少一个第二轴承由所述盖板直接支撑。
在一个或多个实施例中,电动工具组件包括可旋转地支撑刀轴的垂臂组件、配置成当感测到不安全状况时将垂臂组件放置在安全状况下的控制系统、包括可操作地连接到所述刀轴的动力轴的马达;以及部分地封闭所述马达的壳体,所述壳体包括多个径向通风口,所述径向通风口配置成从由所述动力轴限定的轴线径向向外地排出空气。
在一个或多个实施例中,所述壳体由非传导性材料形成。
在一个或多个实施例中,所述壳体在安装在所述马达的动力轴上的风扇上延伸。
在一个或多个实施例中,非传导性材料是塑料。
在一个或多个实施例中,所述电动工具组件包括偏移驱动轴,所述偏移驱动轴通过齿轮可操作地连接到所述动力轴并且至少部分地位于所述壳体内,以及至少一个第一轴承,所述至少一个第一轴承旋转地支撑所述偏移驱动轴且位于所述壳体内。
在一个或多个实施例中,电动工具组件包括由非传导性材料制成的罩和旋转地支撑偏移驱动轴的至少一个第二轴承,所述至少一个第二轴承由盖板直接支撑。
在一个或多个实施例中,所述电动工具组件包括可操作地连接到刀轴和动力轴的齿轮,所述齿轮由壳体装纳。
附图说明
附图示出本公开的各种实施例,且与说明书一起用于解释本公开的原理。
图1描绘了安装于带轮架的台锯的透视俯视图;
图2描绘了图1的台锯的右侧的侧视平面视图,并且其中壳体、斜面板和工件支撑表面被移除,且高度调整滑架处于上部位置处;
图3描绘了图1的台锯的左侧的侧视平面视图,并且其中壳体、工件支撑表面和斜面板被移除;
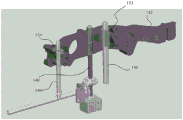
图4描绘了图1的台锯的高度调整滑架、垂臂组件和马达组件的透视俯视图;
图5描绘了图4的高度调整滑架连同用以引导高度调整滑架的运动的杆和管的透视俯视图;
图6描绘了图4的马达组件的侧横截面视图;
图7描绘了从台锯的左侧观察的图4的马达组件的平面视图;
图8描绘了从台锯的左侧观察的在已使马达组件旋转以向图4的带提供期望张力之后的图4的马达组件的平面视图;
图9描绘了图4的高度调整滑架的轨道部分的侧视平面视图;
图10描绘了图9的轨道部分的分解视图;
图11描绘了轨道部分的示例性实施例的部分分解视图;
图12描绘了轨道托架的另一示例性实施例的透视俯视图;
图12A描绘了图12的轨道托架的俯视平面视图;
图13描绘了支撑垂臂组件的图10的轨道组件的横截面视图;
图14描绘了图13的轨道组件的仰视透视横截面视图;
图15A描绘了图4的垂臂组件的分解视图;
图15B描绘了图4的垂臂组件的侧透视图;
图15C描绘了图4的垂臂组件的侧视平面视图;
图16描绘了图1的台锯的右侧的侧视平面视图,并且其中壳体和工件支撑表面被移除;
图17描绘了图4的高度调整滑架的透视图,并且其中烟火式组件(pyrotechnicassembly)和闩锁组件安装于高度调整滑架;
图18描绘了图17的管筒的透视图;
图19和图20描绘了图17的烟火式壳体的透视图;
图21描绘了图1的台锯的局部俯视平面视图,并且其中喉板被移除;
图22描绘了图4的垂臂框架的侧视横截面视图,其示出由垂臂框架的肋的位点和重心共享的公共点;
图23描绘了安装于高度调整滑架的烟火式壳体的侧视透视图;
图24描绘了图17的烟火式组件的分解视图;
图25描绘了图17的带有电气接头的作用弹丸(active shot)的俯视平面视图;
图26-图29描绘了在图24的反应塞被螺纹连接于烟火式壳体内时,图17的作用弹丸使图17的闩锁组件运动;
图30-图31描绘了当移除反应塞时,图17的闩锁组件从烟火式壳体向外偏压作用弹丸;
图32描绘了图4的垂臂组件的侧视平面视图,其指示各种部件的轴线;
图33描绘了在已使垂臂组件抵靠表面垂落同时高度调整滑架处于上部位置处之后图1的台锯的侧视平面视图;
图34描绘了图1的台锯的侧视平面视图,并且其中垂臂组件锁合且高度调整滑架处于下部位置;
图35描绘了在已使垂臂组件抵靠表面垂落并且高度调整滑架处于下部位置处之后图1的台锯的侧视平面视图;
图36描绘了安装于高度调整滑架的反弹式闩锁组件的透视俯视图;
图37-图39描绘了高度调整滑架的左视、俯视和右视平面视图,其示出用以提供增加的强度的肋配置;
图40-图41描绘了斜面滑架的透视图,其示出用以提供增加的强度的肋配置;
图42描绘了安装于斜面滑架的锯控制单元组件;
图43描绘了图42的锯控制单元组件和斜面滑架的分解视图;
图44描绘了图42的锯控制单元组件、垂臂组件和斜面滑架的分解视图;
图45描绘了斜面滑架的侧视透视图,其示出同轴布线,其用以提供与各种部件的连通;
图46描绘了用以提供与各种部件的电气连通的同轴布线的屏蔽件和中心导体;
图47描绘了在中央导体和CCP之间的连接的透视图;
图48描绘了从其通常位置偏移的同轴布线的透视图,在该处,其连接到斜面滑架,并且其中保护性覆盖件被移除以示出连接至斜面滑架的暴露的屏蔽件;
图49-图50描绘了保护性覆盖件,其用以覆盖同轴线的剥除外层的部分,且也提供同轴线和其他部件之间的连通;
图51描绘了图1的台锯的侧视透视图,并且其中壳体被移除以示出部件如何与同轴布线的屏蔽件连通;
图52描绘了用以使斜面滑架枢转的耳轴的分解视图,其示出工件支撑表面和斜面滑架之间的电气隔离;
图53是刀轴的横截面视图,其示出刀轴与带和垂臂组件的其余部分的电气隔离;
图54是图53的带轮的分解视图,其提供带和刀轴之间的电气隔离;
图54A是图54的外部壳的侧视平面视图,其示出燕尾花键;
图55描绘了马达组件的透视图,其示出指向径向方向的通风口,其引导碳尘远离一个或多个部件;
图56描绘了图1的工件支撑表面和喉板的局部分解视图;
图57描绘了由旋钮与移除的工件支撑表面接合的喉板的透视图;
图58描绘了图56的旋钮的俯视透视图;
图59描绘了喉板的前部的侧视平面视图;
图60描绘了垂臂组件的局部透视图,并且其中图15B的刀轴锁接合烟火式壳体以维持垂臂组件处于锁合状况中;
图61描绘了图1的台锯的局部俯视透视图,并且其中喉板被移除以允许垂臂组件的重置;
图62描绘了图1的HMI单元的侧视透视图;
图63描绘了图62的HMI单元的内部部件的分解视图;
图64描绘了图1的台锯的后视平面视图,并且其中斜面滑架处于零度;
图65描绘了图1的台锯的后视平面视图,并且其中斜面滑架处于四十五度的倾斜,使得锯控制单元组件的USB端口通过台锯壳体的灰尘端口通达(access)狭槽可见;以及
图66-图67描绘了保护罩,其能够被用于保护图65的USB端口免受不期望的通达的影响。
贯穿若干视图,对应的附图标记标示对应的零件。贯穿若干视图,同样的附图标记标示同样的零件。
具体实施方式
虽然本文中所描述的电动工具容许各种改型和替代性形式,但是其具体实施例已经在附图中以示例的方式示出且将在本文中被详细地描述。然而,应当理解,不旨在将电动工具限制于所公开的具体形式。不同地,预期覆盖落在如由所附权利要求所限定的本公开的精神和范围内的所有改型、等价物和替代方案。
参考图1,示出台锯组件100。台锯组件100包括安装于轮架104的台锯102。台锯102包括基底壳体106和工件支撑表面108。设置支撑表面延伸部110和112以辅助支撑更大的工件。提供导板114以沿工件支撑表面108引导工件。
劈刀或分料器116邻近成形装置定位,其在该实施例中是从基底壳体106内延伸至工件支撑表面108上方的刀片118。锯片护罩120和反冲棘爪(kick-back pawl)117可以附接至分料器116。刀片118延伸通过喉板(throat plate)122中的狭槽。在台锯102的前部处设置人机接口(HMI)单元124。
邻近HMI单元124定位的角度指示器130指示刀片118相对于工件支撑表面108的角度。斜面调整锁132可以被用于通过使斜面滑架134(在图2中示出)在基底壳体106内枢转来确立刀片118相对于工件支撑表面108的角度。斜面滑架134然后被夹持在斜面调整锁132和斜面夹持件133之间(见图3)。如在图3中进一步描绘的那样,高度调整轮136被用于调整刀片118在工件支撑表面108(在图3中未示出)上方的高度。高度调整轮136的旋转使与螺纹杆140接合的锥齿轮138旋转。螺纹杆140因此被迫或者顺时针或者逆时针旋转(取决于高度调整轮136旋转的方向)。
螺纹杆140螺纹地接合高度调整滑架142。在一个实施例中,螺纹杆140接合高度调整滑架142的螺纹衬套152。高度调整滑架142因此被迫在螺纹杆140旋转时向上和向下运动。由固定地附接至斜面滑架134的高度调整杆144和高度调整管146阻止高度调整滑架142的旋转。高度调整杆144和高度调整管146分别延伸通过高度调整滑架142中的开口148和150,其在图4中示出。
为了减少台锯102的重量,在高度调整滑架142的制造中使用轻质材料,例如铝。虽然对于减小重量而言是有效的,但是铝通常不够坚固以在没有变形或损伤的情况下经受施加于高度调整滑架142的各种力(在下文更全面地描述)。相应地,在开口150内提供在图5中更清楚地示出的粉末冶金衬套153。衬套153沿开口150平均地分布力,由此减小具体地在开口150的口部处的损伤的可能性,该损伤能够导致高度调整滑架142和高度调整管146之间的不期望的“松弛”。
类似地,在开口148的上部口部处设置粉末冶金带狭槽衬套154以保护开口148免受来自高度调整杆144的损伤。在其他实施例中,一个或多个衬套153/154由线性轴承或分裂引导垫取代。在一些实施例中,通过在支撑高度调整杆144和/或高度调整管146的位置处并入阻尼衬套来保护斜面滑架134。
返回图4,由高度调整滑架142支撑马达组件160。马达组件160通过在图6中更清楚地示出的偏移驱动轴164和带轮166驱动带162,带162在一个实施例中由传导性材料制成。由齿轮170使偏移驱动轴164从动力轴168偏移。马达组件160以允许带162在不需要线性张紧器的情况下被张紧的方式附接至高度调整滑架142,如参考图7所解释的那样。
如图7中所示,马达组件160用四个螺钉172附接至高度调整滑架142,这四个螺钉172被插入通过马达齿轮壳体176中的相应安装狭槽174。安装狭槽174被取向成限定马达安装旋转轴线178,其处于动力轴168的旋转轴线180下方,动力轴168相应地低于偏移轴164。相应地,沿与固定地附接至高度调整滑架142的板184螺纹接合的顶开螺钉182的一个方向的旋转引起顶开螺钉(jack screw)182推动附接至马达齿轮壳体176的板186。在一个实施例中,板184或者形成为高度调整滑架142的一部分,或者作为单个单元整合于高度调整滑架142内。因此,代替地,顶开螺钉182与高度调整滑架142螺纹接合。因为被顶开螺钉182冲击的板186位于马达安装旋转轴线178上方,所以马达组件160沿箭头188的方向从图7的位置旋转至图8的位置。
返回图4,马达组件160的上述运动引起附接至偏移驱动轴164的带轮166沿箭头190的方向远离由垂臂组件194可旋转地支撑的从动带轮192运动。因此,带162被置放成处于张紧状态。相应地,对于初始组装而言,马达组件160能够被置放在图7的位置中,且然后朝向图8中描绘的位置枢转至提供带162的期望张紧的位置。该配置要求相比于线性调整机构更少的线性行程,以在被约束的空间内实现相同的张紧。在其他实施例中,弹簧加载的致动器取代顶开螺钉182以随时间流逝维持带张紧。
使用被插入通过带保护罩198的上表面中的带张紧通达端口196(参见图4)的带张力计核实带162的张紧。通达端口196在带保护罩198的上表面上的定位允许从台锯102的上方通达带162。这允许更容易地实现带的张紧的设置同时维持高度调整滑架的结构性要求,而不使锯上下翻动来获得对带162的通达。虽然被描绘为圆形开口,但是在其他实施例中,通达端口196呈不同的几何形状,且在某些实施例中设有可移除的塞或通达门。
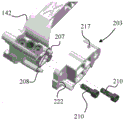
继续图4,垂臂组件194由限定垂臂轨道轴线201的轨道轴200活动地连接到高度调整滑架142。垂臂轨道轴线201的位置被控制以使用参考图9-10进一步描述的轨道托架203定位在偏移驱动轴164(参见图6)的旋转轴线202(其也是带轮166的旋转轴线)和从动带轮192的旋转轴线183之间。
轨道托架203包括轨道轴200被插入通过其的轨道轴孔204。轨道托架203还包括对准开孔205和抗旋转狭槽206,其分别接收从高度调整滑架142延伸的定位器销207和抗旋转销208。轨道托架203由两个螺钉210连接到高度调整滑架142。
抗旋转狭槽206的轴线211被对准以与对准开孔205的中央轴线212相交。相应地,当定位器销207和抗旋转销208分别定位在对准开孔205和抗旋转狭槽206内时,抗旋转销208和抗旋转狭槽206提供精确的角位置以便对准垂臂轨道轴线201。
带有抗旋转狭槽206的轨道托架203和抗旋转销226的并入使得能够使用轻质材料,同时在定位锯片118时提供增加的精度。在一些实施例中,使用被接收在高度调整滑架142上的对应开孔(未示出)内的两个带肩螺钉213(参见图11),或对准销214(图12)实现轨道托架的精确定位。还通过以相对于平行于垂落平面的平面大约0.65°的角度230并入轨道托架203的内部面228来提供锯片118的对准(参见下文和图21)。即使当带162处于增加的张力下,内部面的这种成角度也在贯穿各种倾斜角度定位锯片118时提供增加的精度。
还通过垂臂组件194活动地连接到高度调整滑架142的方式提供在定位刀片118时增加的精度。具体地,如图13中所示,轨道轴200由两个轴承215活动地支撑在垂臂组件194的垂臂框架242内。轨道螺栓232螺纹接合轨道轴200,且抵靠垂臂框架242的间隔分开的托架236的内部轴承壁234压紧轴承215。
轨道销216延伸通过对准的开孔217、218和219。开孔218延伸通过轨道轴200。开孔217延伸通过轨道托架203的上部部分,同时开孔219延伸通过轨道托架203的下部部分。轨道轴200因此关于轨道托架203依轨道地固定。两个紧定螺钉220延伸通过轨道托架203的下部部分中的开孔221,且抵靠图14中所描绘的轨道轴开孔204的两个肩部222锚固轨道轴200。
通过形成轨道轴开孔204的下部圆形部分224和轨道轴开孔204的上部圆形部分226而在轨道轴开孔204中形成肩部222。下部圆形部分224的直径与轨道轴200的直径大致相同。在不同实施例中,上部圆形部分226具有与下部圆形部分224相同或不同的直径。然而,上部圆形部分226的原点沿与紧定螺钉220的位置相对的方向从下部圆形部分224的原点偏移。
相应地,上部圆形部分226为轨道轴200和轨道轴开孔204之间的滑动配合提供充分的空隙。同时,上部圆形部分226和下部圆形部分224的会合处形成肩部222,其沿轨道轴开孔204的整个长度延伸。因此,当安装紧定螺钉220时,紧定螺钉220迫使轨道轴200抵靠肩部222,从而在每一个紧定螺钉和肩部之间形成“三点”锁定。
在一些实施例中,由使用轴承的外圈被压入垂臂框架242内的两个球轴承取代肩部。然后插入轨道轴200,并且其中轨道轴的一侧接合轴承中的一个的内圈。轨道螺栓然后从轨道轴的相对方向旋拧入轨道轴内侧,从而接合另一轴承的内圈。轨道轴和螺栓组件使两个轴承的内圈朝向彼此运动。在外圈固定在垂臂中且内圈被拉在一起的情况下,内部空隙被最小化,因此减小或消除由于轴承的内部空隙而引起的侧之间的运动。
现在转向图15A-15C,更详细地描绘了垂臂组件194。如上文所注意到的,从动带轮192与带162接合,且由垂臂组件194可旋转地支撑。更具体地,从动带轮192由刀轴(arborshaft)240可旋转地支撑,所述刀轴240被配置成可旋转地支撑刀片118(参见图1)。刀轴240被可旋转地支撑在垂臂框架242内。
垂臂框架242还包括装纳弹簧246的弹簧凹部244(图15B)。弹簧246操作性地连接于刀轴锁250的凸缘248。刀轴锁250包括定位在垂臂框架242上方的启动臂252和锁定斜坡254。刀轴240延伸通过刀轴狭槽256,且两个带肩螺钉258延伸通过引导狭槽260,且螺纹接合垂臂框架242。
垂臂组件194包括电容耦合板(CCP)262,接头突片264从其延伸。CCP使用螺钉安装于CCP托架268,图示五个螺钉,其是或者相同或者不同类型的螺钉266,CCP托架268相应地使用三个紧定螺钉269安装于垂臂框架242。CCP托架268包括凸起的唇部270,其配置成提供CCP和刀片之间的电气隔离。虽然在图15a的实施例中描绘了单件CCP托架268,但是在其他实施例中,使用在一些实施例中不连接到彼此的多个模块形成托架。
CCP 262是电容感测系统(在下文中更详细地讨论)的一部分,且由导电材料制成。如在图15C中最清楚地描绘的那样,CCP 262的形状不对称。而且,CCP 262的质心朝向垂臂框架242的轨道件(orbiter)272移动。这种形状提供充分的电容,同时减小了垂臂组件194的惯性。在一个实施例中,对于CCP 262的精整处理是非传导性涂层。可接受的涂层包括用于钢CCP的磷酸锰和用于铝CCP的阳极化处理。此类薄的非传导性覆盖件提供隔离,以防在强力切削期间由于刀片偏转引起的刀片和CCP的传导性部分之间的意外接触。
CCP托架268由非传导性材料形成。在一个实施例中,使用带有不受水影响的具有低介电常数的塑料,以便使系统中的电容变化最小化。CCP托架268被插入垂臂内,且被手动地调整到距刀片适当距离处,然后由紧定螺钉269(参见图15A,仅示出两个)锁合在恰当位置。
具体地,螺钉266被用于通过螺纹接合突起271将CCP 262安装于CCP托架268。任选地,除螺钉266之外,诸如螺母(未示出)的紧固元件能够被用于将CCP 262安装于CCP托架268。在另一实施例中,CCP托架268作为单个单元被包注模塑于CCP 262。因此,不再需要任何紧固元件。突起271然后被插入在垂臂框架中形成的凹部273内,且被调整以将CCP 262设置在期望的位置处。然后,紧定螺钉269被插入通过凹部273中的开孔以接合突起271。
突起271使螺钉266和CCP 262与垂臂框架242电气隔离。CCP托架268的凸起的唇部270沿外侧边缘包绕CCP 262,以在强力切割期间保护CCP 262免于与刀片偶然接触。
继续图15C,轨道件272包括回弹突出部274/275(也参见图15A)和安装于垂臂框架242的下表面的垫276。如在图15B中最佳地观察的那样,垂臂组件194还包括由垂臂框架242支撑的闩锁销282、半球状撞击销280和两个对准销278。
现在参考图16,垂臂组件194由闩锁300维持在锁合位置中。闩锁300由销302活动地连接到烟火式(pyrotechnic)壳体322。也在图17中示出的闩锁300包括闩锁销接收区域304,其在锁合位置中接合闩锁销282。闩锁300还包括两个叉齿(prong)306。闩锁300被弹簧308偏压,使得叉齿306被偏压成与致动器接触,该致动器在一个实施例中是弹丸(shot)310。
弹丸310通过图18中示出的管筒314与另一致动器或者弹丸312配对。桥320联结管筒314中的两个致动器或弹丸310/312。
管筒314在图17中被示出为安装在烟火式壳体322(也被称为致动器壳体)中。也在图19-20中示出的烟火式或致动器壳体322包括内部有螺纹的腔室324、安装板326和指状板328。锁定斜坡364位于指状板328的上部部分处。狭缝330沿内部有螺纹的腔室324的一侧延伸,且在倒圆的末端部分332处终止。这种配置允许作用弹丸的最优定位,如进一步参考图21和图22所解释的那样。
图21描绘了台锯102的局部俯视平面视图,并且其中喉板122被从喉板开口334移除。通过喉板开口334可见的是刀轴螺母336和安装于刀轴240的刀片118。通过喉板开口334也可见垂臂194和高度调整滑架142的一部分。也在图21中描绘的是垂落平面338。垂落平面338是一平面,其与弹丸310和垂臂组件相互连接处对准,且当启动锯控制系统时,垂臂组件以大致平行的方式沿该垂落平面338运动,如下文中更全面地讨论的那样。图22描绘了垂臂组件194的平行于图21的垂落平面338截取的横截面视图。
图21和22因此示出垂臂组件194被配置成使得垂臂组件194的重心340位于垂落平面338上、紧邻或邻近垂落平面338,使得力从弹丸至半球状撞击销280的传递尽可能切实可行地接近垂落平面338地发生。
相应地,烟火式壳体322被配置成使作用弹丸大致在垂落平面338上居中。这导致系统的减少的应力和垂臂组件194的减小的垂落时间。额外地,非作用弹丸(图21的配置中的弹丸312)关于作用弹丸向内定位,同时维持管筒314处于能够通过喉板开口334容易地通达的位置中。该配置确保非作用弹丸不干扰垂臂组件194的运动。
为了进一步改进作用弹丸与半球状撞击销280的对准,对准壳体342被安装于烟火式壳体322,如图17中所示。对准壳体342接收硬化钢对准销278(图15B),由此减小负载下的刀片偏转,以及确保作用弹丸和半球状撞击销280之间的适当对准。在垂臂组件194中设置销278还提供垂臂框架242抵抗相对轨道轴200(图4)的扭转加载或侧加载的增强的稳定。使用硬化钢销作为从铝垂臂框架242延伸的对准销实现了该益处,同时允许实现轻质/低惯性垂臂框架242。
虽然在图15B中示出两个销278,但是在其他实施例中,仅使用一个。而在另一实施例中,在系统中使用一个或多个突起或表面。另外,在一些实施例中,对准壳体定位在垂臂组件194中,同时硬化钢销从烟火式壳体322延伸。在另外的实施例中,对准特征被整合于闩锁300和/或弹丸内。
壳体322中的狭缝330接收管筒314的桥320。狭缝330因此允许将备用的弹丸并入管筒314。然而,狭缝330削弱了烟火式壳体322。因此,在相对于狭缝330在前方的位置和在后方的位置两者处均需要支撑,以预防烟火式壳体322的失效。虽然后部安装板326用图23中示出的两个螺栓346和销348牢固地螺栓连接于高度调整滑架142,但是烟火式壳体322的前部部分的螺栓连接将导致不可接受的高应力,即使在设置抑制在狭缝330的末端处的开裂的倒圆末端部分332的情况下也是这样。出于该原因,使用指状板328。
如图17中所描绘的那样,烟火式壳体322的前部部分由指状板328和高度调整滑架142上的指状肋配置344之间的接触支撑。指状板328因此沿烟火发射式作用(pyrofire)的方向(在烟火式壳体322下方)传递力,但是不在任何其他自由度方面约束烟火式壳体322,这极大地减少了该部分中的应力水平,且允许烟火式壳体322由可负担且轻质的材料形成。在该实施例中,提供三个指状件。在其他实施例中,提供更多或更少的指状件。
所公开的烟火式系统提供多个额外的特征。举例来说,图24的烟火式组件350包括两个弹丸310/312。虽然在一些实施例中锯控制系统提供电气检查以确保未用的弹丸被连接,但是在一些实施例中,安全控制系统不配置成确保连接的弹丸恰当地安装在烟火式壳体322中且因此与半球状撞击销280对准。然而,图24中示出的烟火式组件350被配置成确保用户不错误地连接错误的弹丸。
图24描绘了烟火式组件350,其包括烟火式壳体322、管筒314和弹丸310/312,其已经在上文中描述。烟火式组件350还包括电气接头352、连接线354和反应塞356。
通常,弹丸310/312和管筒314设置为单个单元。另外,台锯102设有连接线354,其被插入通过反应塞356的开口358,如在图25中最清楚地示出的那样。连接线354的一端永久地附接至锯控制单元,同时另一端附接至电气接头352。
通过在管筒314中设置弹丸310/312来组装烟火式组件350。弹丸310/312和管筒314然后被插入烟火式壳体322内。对于新的单元,任一弹丸310/312与壳体轴线366对准且被插入内部有螺纹的腔室324内。如果先前已经使用了该单元,则未用的弹丸被插入内部有螺纹的腔室324内。
接着,电气接头352被插入弹丸310/312的塞内。反应塞356然后被螺纹连接到内部有螺纹的腔室324内。由于电气接头352大于开口358(参见图25),所以如果电气接头352连接到位于内部有螺纹的腔室324中的弹丸,则反应塞356仅能够螺纹连接到内部有螺纹的腔室324内。电气接头352和弹丸上的匹配接头的并入因此能够实现如上文所描述的机械/电气闭锁的并入。
在其他实施例中,反应塞356和电气接头352能够用卡扣帽或手电筒状帽取代。另外,在这种实施例中,电气接头352能够被省略,且用简单的尾纤(pigtail)接头取代。
反应塞356还辅助闭锁(lock-out)功能,其确保管筒314适当地安置在烟火式壳体322内。如图26中所示,弹簧308沿顺时针方向偏压闩锁300。当反应塞356未像图26中描绘的那样适当地螺纹连接到内部有螺纹的腔室324内时,叉齿306迫使弹丸312在内部有螺纹的腔室324内向上,且闩锁300被沿顺时针方向旋转至闩锁300的下部部分360的下表面在该处定位在闩锁销282的垂落路径内的位置。相应地,通过垂臂组件的任何部分和下部部分360之间的接触约束垂臂组件194的逆时针轨道运动。因此,闩锁销282不能被接收在闩锁销接收区域304内。
通过沿使其进一步接合内部有螺纹的腔室324的方向旋转反应塞356,反应塞356被迫抵靠管筒314或弹丸310,从而迫使弹丸310或管筒314抵靠叉齿306。这迫使弹簧308压缩,且沿逆时针方向旋转闩锁,从而导致图27的配置。在图27中,仍然通过闩锁销282和下部部分360的下表面之间的接触约束垂臂组件194的逆时针轨道运动。
反应塞356的继续旋转使管筒314完全地安置在内部有螺纹的腔室324内,进一步将闩锁300旋转至图28的配置。在图28中,闩锁300已经被旋转,使得下部部分360的侧表面处于闩锁销282的垂落路径内。相应地,通过使垂臂组件194沿逆时针方向轨道运动,当闩锁销282沿下部部分360的侧表面向上滑动时,闩锁销282压抵下部部分360的侧表面,从而进一步压缩弹簧308和沿逆时针方向旋转闩锁300。
垂臂组件194的继续的逆时针轨道运动使闩锁销282在下部部分360的侧表面上方运动。相应地,弹簧308迫使闩锁300沿顺时针方向旋转,从而导致图29的配置。在图29中,闩锁300已经沿顺时针方向旋转,使得闩锁销282被接收在闩锁销接收区域304内。
相应地,如果反应塞356不充分螺纹连接到烟火式壳体322内,则闩锁300提供机械“闭锁”,且垂臂组件194不能够抬升至切割/锁合位置内。虽然关于烟火式装置描述,但是反应塞356能够与提供机械和电气闭锁能力两者的任何期望类型的致动器一起使用。
反应塞356通常被配置成使得能够容易地用手转动其。在一个实施例中,反应塞356包括肋362(参见图24),其配置成允许紧固/松开。肋362进一步被配置成允许用扳手扳钳(未示出)紧固/松开反应塞356。在一些实施例中,反应塞是六角形塞,能够用标准六角扳钳而不是扳手转动其。在另外的实施例中,设置与反应塞分离的锁定特征,其需要工具以允许反应塞的旋转。举例来说,锁定特征可以是弹簧加载部件(球轴承、弹簧调整片(springtab)),其通过在锁定突片上推动来操作,锁定突片需要螺丝刀或类似的工具来释放。在其他实施例中,使用孔和带有圆形反应塞的挤出销,这需要专用的扳钳以紧固和松开反应塞。
由弹簧308将闩锁300偏压至作用弹丸内还辅助管筒314的移除,如初始参考图30所解释的那样。图30描绘了完全安置在烟火式壳体322内的管筒314。为了移除管筒314,反应塞356被移除。由于闩锁300被抵靠作用弹丸偏压,所以反应塞356的移除允许管筒314被向上推动至图31中所描绘的位置。用户能够然后在非作用弹丸上方抓持管筒314的上部部分,而不是使用连接线354拉动管筒314。
重新参考图16,当由锯控制系统启动作用弹丸310时,弹丸310通过半球状撞击销280向垂臂组件194施加力,其中半球状撞击销280通过壳体322与垂落平面338大致对准。该力被传递至闩锁销282(参见图29),其迫使闩锁300压缩弹簧308且使闩锁300的闩锁销接收部分304运动离开闩锁销282的垂落路径。垂臂组件194然后沿顺时针方向轨道运动,从而使刀片118(参见图2)运动,刀片118安装于工件支撑表面104下方的刀轴240。
如上文所述,垂臂轨道轴线201的位置被控制以位于偏移驱动轴164的旋转轴线202和从动带轮192的旋转轴线之间。该布置提供垂臂组件194的增加的垂落速度,且防止将导致动力系性能的劣化的带的损伤或拉伸,如进一步参考图6、图15A和图32所解释的那样。图32示出垂臂轨道轴线201、偏移驱动轴164的旋转轴线202和从动带轮192的旋转轴线183。因为带轮166被安装于高度调整滑架142,且从动带轮192安装在垂臂组件194上,所以带162的张紧如上文所描述的那样使带轮166运动远离垂臂轨道轴线201(向图32中的左侧)。因此,在垂臂垂落期间,从动带轮192朝向带轮166运动。相应地,轴线183运动得更接近轴线202。距离的这种减小使带松弛,这导致更快的垂落时间。
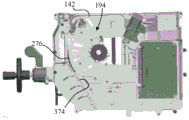
垂臂组件194的冲撞部分地通过垫276和表面374之间的接触被吸收,如图33中所示。垫276使用任何期望的安装手段(诸如胶、紧固件、夹固板等)安装在垂臂组件194上。相比于将垫安装在表面374上,将垫276定位在垂臂组件194上允许垫带有更小大小的几何形状。
例如,图33描绘了当高度调整滑架142初始地处于如图2中所描绘的完全抬升位置中时,垂臂组件194和表面374之间的冲撞的位置。当高度调整滑架142处于图34中所描绘的最低位置处时,垂臂组件194在如图35中所描绘的更低位置处接触表面374。因此,相比于覆盖接触表面374的垂臂组件194的部分所需的材料,覆盖由垂臂组件194接触的表面374的跨度将耗费更多的材料。因此,将垫276安装在垂臂组件194上减少了所需的垫材料的量。
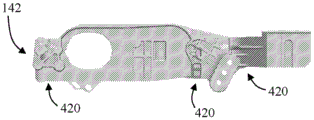
垂臂框架242的配置因此被部分地选定以针对接触表面374提供期望表面。返回图22,进一步选定垂臂框架242的配置以减少垂臂框架242的重量。如图22所描绘的那样,许多肋376/378/380/382从下表面384延伸至接收刀轴240的开口386。肋376/378/380/382提供强度,其允许使用更少的材料和/或允许使用更轻的材料。在垂臂组件194的背景中,这转换成减少的惯性矩,由此响应于感测到的不安全状况提供垂臂组件的更迅速的下降。
肋376/378/380/382也减少了一旦垫276接触表面374时垂臂组件194的回弹力。如图22中所示,肋376/378/380/382中的每一个均限定相应轴线388/390/392/394。轴线388/390/392/394在位点396处相交,位点396与重心340一致、邻近重心340、紧邻重心340。这种配置减少了反弹能量,且允许材料的量或重量的进一步减少。
上文描述的配置通常不足以耗散垂臂组件104的所有反弹能量。相应地,如图36中所示,设置反弹式闩锁组件400。反弹式闩锁组件400包括下部闩锁402和上部闩锁404,其由销406独立地活动地连接到轨道托架203。在一些实施例中,销406的大小比必需的更长以提供容差。可以在销406的头部和闩锁404之间使用波形垫圈(未示出)以允许容差,同时为系统提供期望的张力。
下部闩锁402和上部闩锁404分别由两个弹簧410和412偏压成与垂臂框架242的回弹表面408接触。弹簧410/412由螺栓414锚固于轨道托架203。反弹式闩锁组件400还包括重置杠杆416,其从下部闩锁402延伸至轨道托架203上方的位置。
在垂臂组件194响应于感测到的不安全状况的轨道运动期间,回弹表面408沿顺时针方向轨道运动(如在图36中所观察到的那样)。当回弹表面408轨道运动时,回弹突出部275(参见图15A)轨道运动越过下部闩锁402。相应地,弹簧410将下部闩锁402偏压成在回弹突出部275的最外限度向内的位置处与回弹表面408接触。随后,如上文所描述的那样,垂臂组件194接触表面374。当垂臂组件194远离表面374回弹时,下部闩锁402与回弹突出部275接触,从而预防垂臂组件194的进一步向上(逆时针)运动。
回弹突出部274(参见图15A)和上部闩锁404类似地操作。主要差异在于,为了使回弹突出部274在上部闩锁404下方轨道运动,需要回弹表面408的更大的顺时针轨道运动。这例如在高度调整滑架142朝向其最高位置(诸如图16中所描绘的高度)定位时发生。相应地,在更高的位置处,由回弹突出部274和上部闩锁404提供回弹保护,同时在更低的高度处,诸如在图34中所描绘的高度处,由回弹突出部275和下部闩锁402提供回弹保护。
当用户希望使垂臂组件194返回锁合位置时,用户推动重置杠杆416,其使下部闩锁402运动远离回弹表面408。另外,下部闩锁402的唇部418接触上部闩锁404,从而使上部闩锁404运动远离回弹表面408。垂臂组件194然后能够被抬升至由闩锁300保持的锁合位置。
肋配置的用以减少垂臂组件194的重量的上述用途也减少了台锯102的总重量,从而使台锯102更加便携。出于相同的目的,在台锯的其他区域中使用肋配置。例如,图37-图39描绘了高度调整滑架142的各种视图。设置大量的肋配置420以便适应来自弹丸310/312的大冲撞力。
类似地,如图40-图41中所描绘的那样,斜面滑架134包括肋配置422/424/426/428连同其他结构特征。图40-图41中也示出开口430和432。肋配置424和428提供用于表面374的结构支撑,表面374如上文所描述的那样被垂臂组件194冲撞。肋配置422和426及其他结构特征提供支撑,这允许适应开口430和432。需要开口430以便允许马达组件160的安装(图4),同时设置开口432以增强锯控制单元的操作,如将在下文中更详细地讨论的那样。此外,移除材料以形成开口432减少了锯的重量。
相应地,在一个实施例中,贯穿台锯102使用肋配置以在不损害结构的情况下保持台锯102轻和便携。尽管如此,以更坚固的材料的形式提供台锯102的选择性区域和部件以确保台锯102的最优功能,即使在多次烟火式启动之后也是这样。例如,一次垂落的冲撞的力传递通过垂臂、轨道托架且进入高度调整杆。相应地,轨道托架216(图10)和斜面/高度调整滑架围绕高度调整杆的区域通常用更坚固和或更重的材料形成。同样地,在一些实施例中,对准壳体342(图17)、烟火式壳体和闩锁300由更坚固的材料诸如通过使用粉末冶金、锌压铸等形成。
由于许多结构部件由轻质材料形成,所以来自烟火式操作和来自阻止(arresting)垂臂组件194的力不被阻抑。因此当定位敏感的部件时,必须考虑所传递的力。一种这样的敏感部件被装纳在图42中的锯控制单元组件450内,其被安装于斜面滑架134。锯控制单元组件450包括用于控制台锯组件100的电子器件。这种电子器件包括带有存储在其中的程序指令的存储器,当由锯控制单元组件450的处理器执行所述程序指令时,其控制安全控制系统。
如图43中所示,锯控制单元组件450包括安装于外部壳体454的印刷电路板(PCB)452。外部壳体454相应地安装于内部壳体456。锯控制单元组件450然后安装于斜面滑架134。内部壳体456和外部壳体454使PCB 452与斜面滑架134电气隔离。USB端口458(参见图42)为PCB 452提供电子通达。
锯控制单元组件450的前述配置提供来自烟火式操作和来自阻止垂臂组件194的力的阻抑。尽管如此,一些力仍可以被传递至PCB 452。相应地,如果垂直于这些力矢量中的任一者安装PCB 452,则大的冲撞/振动负载将被施加于PCB 452,这能够引起对PCB 452的损伤。相应地,如在图44中最佳地观察到的那样,以相对于表面374上的冲撞和弹丸的力在其中施加的平面成大约15度的角度安装PCB 452。
如果PCB 452被安装成紧密接近和平行于承载信号的传导性本体(诸如斜面滑架,如在下文中更详细地讨论的那样),则信号能够被电容耦合于PCB 452,且在其他信号中引起不希望的噪声。因此,斜面滑架134和锯控制单元组件450被配置成使得不存在平行金属表面来将噪声耦合于PCB 452。出于该原因,在斜面滑架134中设置开口432。
虽然如下文中进一步讨论的那样,出于线路布设的目的,PCB 452在斜面滑架134上的安装是方便的,但是在一些实施例中,PCB 452安装在工件支撑表面的塑料基底或底侧上。在这些实施例中,力的传递和信号耦合被减少,但是线路布设通常尚不最优。将PCB 452安装于工件支撑表面的底侧具有使用工件支撑表面作为PCB 452的诸如三端双向可控硅开关元件的热量生成部件的热沉的增加的优点。在另一实施例中,不同于PCB 452的生成热量的诸如第二PCB的部件安装于工件支撑表面的底侧,且使用工件支撑表面作为热沉。
如上所述,在一个实施例中,针对线路布设的方便选择锯控制单元组件450的定位。图45中描绘了用于一个实施例的线路布设。在图45中,PCB 452由同轴缆线460连接于CCP 262。图46中示出的同轴缆线460包括中心导体462,其通过绝缘体466与屏蔽件464绝缘。外部塑料覆层468保护且绝缘屏蔽件464。如图47中最清楚地示出的那样,同轴缆线460的中心导体462连接到CCP 262的接头突片264以提供可靠的连接,其能够经受烟火发射式作用事件的冲击加载。
返回图45,同轴缆线460在位置470处连接到高度调整滑架142,且在位置470和接头突片264之间的线460中提供充分的余量(slack),以允许垂臂组件194在不使同轴缆线460从接头突片264脱离的情况下运动。
同轴缆线460进一步在位置472和474处连接到斜面滑架134,且在位置476处连接到高度调整滑架142。在位置474和476之间在同轴缆线460中提供充分的余量,以允许高度调整滑架142相对于斜面滑架134的运动。
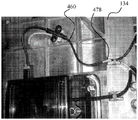
在各种位置处,外部塑料覆层468被剥除以暴露屏蔽件464。举例来说,图48描绘了与位置474相关联的剥除外层的区域478。剥除外层的区域478置放成在位置474处与斜面滑架134直接接触。通常,保护性覆盖件480(参见图49)然后被附接在剥除外层的区域478上以保护剥除外层的区域478,且确保屏蔽件464和下方的金属部件之间的良好接触。
取决于连接的位置,可以使用双螺钉保护性覆盖件,诸如保护性覆盖件480,或者单螺钉保护性覆盖件,诸如图50的保护罩482。在一些实施例中,保护性覆盖件中的一个或多个由塑料形成,同时在其他实施例中,保护罩中的一个或多个由金属形成以提供增加的连接性。替代性地,同轴缆线屏蔽件464能够直接钎焊于其他部件或表面。
在一些实施例中,仅设有保护罩480/482的连接位置被剥除外层。因此,在一些实施例中,缆线在图45的位置472和476处被剥除外层,但是在位置474处,缆线不被剥除外层。
同轴缆线屏蔽件464因此连接到金属部件,使得屏蔽件464能够在不终止的情况下连接到多个点,且以便在外部塑料覆层468被剥脱之处为同轴缆线460提供保护。这确保至底架组件中的所有金属部分的不间断的屏蔽件连接。同轴缆线460因此被用于将屏蔽件连接至斜面滑架134、高度调整滑架142、劈刀116和相关联的部件等。
也由位置472提供到角度指示器130(图1)的屏蔽件连接。如上文所述,位置472与斜面滑架134电气连通,这也在图51中示出。斜面滑架134相应地与斜面夹固件133电气连通。最后,当由斜面调整锁132锁定斜面滑架134时,斜面夹固件133被压成与角度指示器130电气连通。因此,角度指示器130被置放成与屏蔽件464电气连通。
由非传导性前板486使角度指示器130与工件支撑表面108电气隔离。这允许工件支撑表面108维持在“中性”,同时角度指示器130处于“屏蔽件(shield)”处。在其他实施例中,由作为台连接的塑料隔离件、通过使用全塑料前板或带有用于斜面夹固的小插入件的塑料前板,或者通过使用带有非传导性隔离件的全金属前板对斜面锁和工件支撑表面提供电气隔离。如果期望,则工件支撑表面108可以连接到地面,以减少来自静电的对感测系统的干扰。来自刀片和连接到屏蔽件的部件的静电能够通过将那些部件通过高电阻缆线连接至地面来改善。
由于斜面滑架134从工件支撑表面108悬垂,所以支撑机构也必须被绝缘。如图52中所示,斜面滑架134包括一对倾斜耳轴488(在图52中仅一个可见),其由附接至工件支撑表面108的一对耳轴块490可枢转地支撑。耳轴块490通过一对塑料耳轴插入件492与倾斜耳轴488绝缘。
在一些实施例中,角度指示器130连接到屏蔽件,或者替代性地或者额外地,通过斜面滑架134或高度调整滑架142连接。举例来说,图45示出斜面滑架134在位置472和476处连接到“屏蔽件”。与位置472和476的电气连通可以通过与高度调整杆484电气连通的粉末冶金托架496(参见图51)和/或通过与高度调整杆484电气连通的螺纹杆托架498提供。因此,虽然PM托架496/498提供额外的强度(这允许台锯102的其他部分用轻质金属形成),但是它们也能够提供部件之间的良好的电气连通。
如上文所述,高度调整滑架142连接到屏蔽件464。垂臂框架242相应地通过轨道托架203与高度调整滑架142电气连通。相应地,刀轴240和刀片118与垂臂框架242电气隔离。如图53中所示,刀轴240通过塑料轴承壳体500与垂臂框架242电气隔离,其中塑料轴承壳体500装纳轴承501,轴承501支撑刀轴240的刀片侧502。由轴承单元506支撑刀轴240的带轮侧504。垂臂框架242包括塑料包注模(over-mold)508,其支撑后轴承510。相应地,刀片118,以及刀轴240、刀轴螺母336和刀片垫圈512/514中的每一个均与垂臂框架242电气隔离。在替代实施例中,轴承510通过部件(未示出)隔离,其中,所述部件能够或者通过压配合、粘合剂、包注模塑,或者通过其他技术被并入后轴承510。轴承能够由非传导性材料(作为示例,诸如陶瓷材料)形成。
刀轴240进一步通过带轮192与传导性带162(图15A)电气隔离。如图53和图54中所描绘的那样,带轮192包括内部芯520、中间芯522和外部壳524。填隙片526被设置在刀轴240和从动带轮192的内部填隙片唇部528之间。在另一实施例中,可以在系统中使用多于一个填隙片。锁紧螺母530将带轮192维持在刀轴240上。
填隙片526提供带轮192和带轮166之间的正确对准。马达端带轮166附接至马达组件160。驱动带轮192附接至垂臂组件194。由于容差积累,两个带轮192/166可能偏移。相应地,在该实施例中,带轮中的一个是固定的,且另一个可调整。虽然在图53的实施例中使用填隙片,但是在其他实施例中,由滑动轴环或能够通过在外螺纹上转动调整的轴环取代填隙片。其他的实施例并入可调整轴环、在带轮中带有顶开螺钉的活动轴环、在带轮和轴上的偏斜平面、代替锁紧螺母的c-圈、可调整的多件式带轮,或基于实际轴偏移测量使用大小不同的带轮的方法。
返回图54,内部芯520是耐磨损的,且可以由传导性材料形成。内部芯520包括开孔532,其配置成诸如通过螺纹接合与刀轴240联接。也可以使用其他接合方法,诸如花键、键、压配合连接等。外部壳524也耐磨损,且可以由传导性材料形成。外部壳524包括外表面534,其配置成接合带162。
中间芯522由非传导性材料形成,其在一个实施例中是嵌件模塑塑料。内部芯520的外表面536和外部壳524的内表面538包括特征以防止中间芯522相对于内部芯520或外部壳524的滑动。特征包括但不限于:压花、花键、燕尾榫(dove-tail)、突出结构、防滑结构、锁定结构等。
如图54A中所描绘的那样,在该实施例中,外部壳524包括花键540,其是燕尾形的。外部面呈现大约6°的角度542。这提供增加的锁定,当使用呈现不同的热膨胀和收缩特性的材料时,这是有益的。相应地,当形成中间芯522时,如图54中所描绘的那样,在中间壳中形成互补的燕尾结构。因此,带轮的外部部件和内部部件限定其间的多个燕尾连接。
在其他实施例中,使用全塑料带轮、阳极化铝带轮,或者塑料包注模塑带轮提供刀轴240和带162之间的电气隔离。
在一些实施例中,代替传导性带162,使用非传导性带。在该实施例中,传导性带轮能够与非传导性带一起使用。在另一实施例中,传导性带能够与一个传导性带轮和一个非传导性带轮一起使用。
图6中示出的马达组件160因此通过带轮192与刀轴240隔离。如图6中所描绘的那样,马达组件160还通过带轮166隔离,带轮166像带轮192那样制成,其带有在内部芯582和外部壳584之间的非传导性中间芯580。
虽然马达组件160因此与刀轴240和刀片118电气隔离,但是尽管如此,马达仍能够生成电磁干扰。相应地,马达组件160被配置成减少干扰的电磁能量的潜在传输。如图6中所描绘的那样,动力轴168由轴承588径向地支撑在罩壳586内。动力轴168的另一端由轴承590径向地支撑在马达齿轮壳体176内。包含齿轮170的偏移驱动轴164由轴承592径向地支撑在马达齿轮壳体176内。轴承594由盖板596支撑。盖板596附接至马达齿轮壳体176且围绕齿轮170,且将齿轮170定位成由电枢小齿轮驱动。
如果所有前述部件均由金属制成,则马达组件160将像天线一样起作用,且传输能够干扰感测系统的噪声。具体地,偏移驱动轴164(也被称为齿轮轴)和轴承588、590、592和594均传输噪声,如果联接到像马达齿轮壳体176、马达罩壳586或盖板596那样的大部件,则如果那些部件均由金属形成,则噪声将在感测系统的附近传输。为了减少对感测系统的干扰,马达齿轮壳体176、罩壳586和盖板596因此由塑料制成,从而显著地减小了由马达组件160传输的噪声。在替代性实施例中,非金属屏障定位在轴/轴承和盖板/齿轮壳体之间。
除了来自电气噪声的干扰之外,马达组件160也生成碳尘,其能够干扰包括CCP262的感测系统的操作。例如,来自通用马达刷的碳尘能够在部件上积累,且可以形成将影响感测系统的传导性路径。相应地,与通常的马达壳体不同,马达齿轮壳体176设有许多径向通风口610,如图55中所示。径向通风口610使由风扇612(参见图6)轴向地驱动的冷却空气转向,且使空气径向地转向。相应地,在风扇驱动的空气内夹带的任何碳均沿远离包括CCP 262的电气隔离部件的方向被迫动,由此减小在隔离的部件之间积累碳尘的可能性。
在一些实施例中,通过并入电子整流马达而不是AC通用马达来实现电气噪声干扰的额外减少。电子整流马达提供更加一致的噪声水平,这更容易被缓解且可以减少生成的噪声。其他噪声减小特征包括并入代替塑料轴承隔离件的陶瓷轴承、用热固塑料或热塑塑料使齿轮与带轮轴隔离、诸如通过使用非传导性刀片垫圈局部地隔离刀片、在轴上并入非传导性联接器、并入部分非传导性的刀轴,或使用带有隔离的轴承的铝齿轮壳体。
图1的导板114也配置成减少对感测系统的潜在干扰。具体地,导板114可移除且活动地附接至安装于工件支撑表面108的导轨620/622。导板114任选地与工件支撑表面108电气连通。由于导板114是活动的,所以导板可能与刀片118或劈刀116(或相关联的棘爪)接触。为了减少能够影响感测系统的无意接触的可能,导板114的本体部分的侧部和顶部分别形成有隔离部件624、626、628。这允许导板114的内部部件和末端部分由金属形成。
在一个实施例中,隔离部件624、626、628中的一个或多个能够被用户移除和重新安装,以允许用工具使用定制的夹具或固持件。在另一实施例中,使用单个隔离部件。一个隔离部件可以是“U”形,以覆盖所有三个表面,或者仅仅覆盖导板的一侧。
在另外的实施例中,导板的本体部分用隔离材料包注模塑。在一些实施例中,劈刀和相关联的棘爪与屏蔽件信号隔离,或者由非传导性材料形成。在一些实施例中,隔离部件628被省略,且反冲棘爪设有“锁关”特征(类似于在上方的防护件常有的那些),其锁关以防止与导板的顶部的接触。在另外的实施例中,隔离部件628被省略,且导板被配置成仅延伸跨过工件支撑表面108至在该处其不能接触反冲棘爪的位置。
图1的喉板122也被配置成减少电气干扰,如参考图56所解释的那样。喉板122包括插入件接收区域640,插入件642被安装在其中。喉板122被配置成在工件支撑表面108的上表面中配合在喉板开口334内。通过首先将两个突片646/648插入工件支撑表面108中的狭槽(未示出)内或在工件支撑表面108的唇部(未示出)下方,喉板122被可移除地安装于工件支撑表面108。然后使旋钮650旋转以将喉板122锁定在恰当位置。
旋钮650具有本体部分652和柄654。本体部分652可旋转地定位在工件支撑表面108中的旋钮凹部656中。柄654延伸通过旋钮凹部656中的孔(未示出)到达工件支撑表面108的底侧。弹簧组件658在工件支撑表面108下方定位在柄654(参见图57)上,从而抵靠旋钮凹部656的底部偏压本体部分652。
转到图58,旋钮650的本体部分652包括两个指状孔660、锁定凸轮662和提升凸轮664。指状孔660提供一区域,其用于使用户获得杠杆作用以便使旋钮650旋转。在其他实施例中,提供其他几何形状以允许用户获得杠杆作用。在一些实施例中,本体部分包括联接特征,其在期望旋钮650的旋转时,允许诸如螺丝刀、通用扳钳或其他工具的工具接合旋钮650。
凸轮662和664选择性地接合位于图59中示出的喉板122的旋钮凹口668中的凸轮斜坡666。通过旋钮650沿顺时针方向的旋转,使提升凸轮664在凸轮斜坡666下方旋转,从而向上迫动喉板122,以便允许用户更容易地抓持和移除喉板122。旋钮650沿逆时针的旋转在凸轮斜坡666的顶部上旋转锁定凸轮662,由此将喉板锁定在恰当位置。
在一个实施例中,旋钮650和喉板122由塑料制成,以预防对感测系统的干扰。在经受增加的磨损的区域中,诸如插入件642的金属插入件可以被用于提供增加的耐磨性。通过塑料喉板122使这种金属插入件与工件支撑表面108绝缘。
通常期望喉板122的移除以便促进刀片118或其他成形装置的更换。相应地,用户仅仅沿顺时针方向旋转旋钮650以如上文所描述的那样向上迫动喉板122,且然后移除喉板以暴露刀轴螺母336,如图21中所描绘的那样。由于垂臂组件194仅由闩锁300单独地支撑(参见图29),因此用户可能在松开或紧固刀轴螺母336时无意地强行移动(dislodge)垂臂组件194。例如,当刀片扳钳被用于沿紧固方向转动刀轴螺母时,生成力矩,其沿对抗闩锁弹簧308的支撑力作用的方向作用在垂臂轨道件272上,且能够引起解锁。如下文中所描述的那样,刀轴锁250被用于预防这种解锁。
参考图15B,一旦喉板122被移除,用户就沿箭头670的方向推动启动臂252。现在参考图21,当沿图15B的箭头670的方向推动启动臂252时,凸缘248压缩弹簧246,且沿箭头672的方向迫动刀轴锁250。刀轴锁250因此借助于由带肩螺钉258引导的引导狭槽260和刀轴狭槽256沿带肩螺钉258和刀轴240滑动。
如图15B中所描绘的那样,当刀轴锁250向左运动时,刀轴狭槽256的狭窄部分674运动到刀轴240中的槽口676内,从而锁定刀轴,这允许用户旋转刀轴螺母336(参见图21)。
额外地,如图60中所描绘的那样,锁定斜坡254定位于锁定斜坡364上。由于锁定斜坡364是烟火式壳体332安装于高度调整滑架142的一部分,因此即使在紧固刀轴螺母336时,垂臂组件194也不能被从闩锁300解锁。在替代实施例中,刀轴锁与附接至高度调整滑架142或者是高度调整滑架142的一部分的其他部件相互连接。
在或者由于锯控制单元引起的垂臂组件194从闩锁300解锁或者其他解锁的情形中,喉板122的移除还允许用户重置垂臂组件194。如图61中所示,可以通过如下方法重置垂臂组件194:首先沿箭头678的方向推动重置杠杆416,这如上文关于图36所描述的那样使上部闩锁404和下部闩锁402运动,从而允许使垂臂组件194向上轨道运动。用户然后围绕刀轴螺母336或刀轴240定位刀片扳钳680,以将垂臂组件194拉回锁合位置,如上文关于图26-图29所描述的那样。
在一些实施例中,推棒或一些其他可移除工具被用于抬升垂臂组件194。在另外的实施例中,把手被设置在垂臂组件本身上。在又另外的实施例中,在解锁之后,诸如通过使用在垂臂组件194的运动期间存储的能量,垂臂组件194被自动地抬升。在一些实施例中,来自垂臂组件的运动的一些能量被存储在定位在表面374处的弹簧中。
图62中更详细地示出图1的HMI单元124。HMI单元124包括壳体700、接入点702和若干状态指示器704,在本文中示出近场通信(NFC)接入点。其他类型的通信协议,诸如蓝牙、紫峰、Wi-Fi、数据协议、移动协议、超宽带(UWB)协议或任何频段是可能的。壳体700保护HMI单元124的其他部件,同时提供对HMI单元124的部件的用户访问。NFC接入点702是一位置,诸如智能电话的电子装置能够定位在该处,以便将数据从HMI单元124的收发器传递至智能电话。为此目的,用户智能电话设有包括通信协议的应用程序。用户能够使用NFC接入点702来获得台锯102的当前状态以及用于台锯的独特的识别信息。应用程序能够然后被用于获得维护建议、重置程序或故障检修程序,及提供台锯的注册。应用程序还能够锁定或解锁系统。例如,应用程序被用于使用个人身份号码或代码锁定或解锁旁路开关和马达电源开关中的一者或多者。
状态指示器704被用于为用户提供期望的警告或状态指示符。在一些实施例中,状态指示器704指示可用功率、旁路安全系统、可由用户修正的安全或系统错误,以及可由服务中心修正的安全或系统错误。在不同的实施例中,提供更多或更少的状态指示器704。HMI单元124的构造使得即使在明亮的日光中也能够观察状态指示器704,如进一步参考图63所讨论的那样。
如图63中所示,由印刷电路板(PCB)708上的四个LED 706照亮状态指示器704。在一些实施例中,LEDS 706中的每一个均被设置为具有不同于其他LED的颜色的有色LED。NFC天线710也被设置在PCB 708上。PCB 708由附接至壳体700的支撑件712支撑。间隔件714由若干夹716附接至支撑件712。间隔件714包括若干凹部718,其包括在凹部718的下部部分处的开口(未示出),所述凹部718接收LED 706中的相应的一个。间隔件714提供LED和漫射器(diffuser)720之间的适当间距,以及NFC天线710和智能电话接入点702之间的适当间距。间隔件714的凹部718也防止不同颜色的LED 706之间的光渗透(light bleed)。间隔件714的凹部718还包括一个或多个开口或通路719。通路导引灰尘远离LED 706,由此防止LED706被覆盖。
漫射器720包括若干透镜722,每个透镜与相应的一个凹部718相关联。漫射器720维持LED亮度,同时漫射光,以遍及暴露的表面看上去均匀。漫射器720由耐刮擦和碎裂的材料制成。
虽然台锯102的一些部件因此被配置成提供通达或使用的容易性,但是不期望由用户通达或使用一些部件。举例来说,在台锯102的组装期间和在一些情形中,PCB 452必须能够由服务技术员电子地通达,但是不应当由用户通达。相应地,USB端口458定位成为技术员提供通达,同时限制用户通达,如初始参考图64所讨论的那样。
在图64中,台锯102被描绘为带有零斜角。相应地,灰尘端口730在基底壳体106中邻近灰尘端口通达狭槽732的下部末端部分定位。灰尘端口730是附接至斜面滑架134(在图64中不可见)的灰尘罩盖734的一部分。在该位置,用户不可见图42的USB端口458和外部壳体454两者。
图65描绘了当台锯102以四十五度的斜角定位时台锯103的后视图(在该视图中未描绘灰尘罩盖734)。在该位置处,通过灰尘端口通达狭槽732可观察到外部壳体454和USB端口458。相应地,USB端口458能够由服务技术员通达。然而,由于不预期用户时常以图65中所描绘的角度通过灰尘端口通达狭槽732查看,因此用户将通常看不到USB端口458。相应地,在大部分情形中,对用户屏蔽USB端口458。
在一些实施例中,对USB端口458的通达还诸如通过提供保护塑料或橡胶塞736(图66)或盖738(其用抗破坏螺钉740(图67)拧紧)而被保护。在一些实施例中,必须移除外部壳体454以提供对PCB 452的通达。
虽然本公开已经在附图和前述描述中详细图示和描述,但是其应当被视为说明性的,且本质上不是限制性的。应当理解的是,仅优选实施例已被示出,且期望落在本公开的精神内的全部改变、改型和更多应用受到保护。
Claims (13)
1.一种电动工具组件,包括:
可旋转地支撑刀轴并且能够在第一垂臂位置和第二垂臂位置之间运动的垂臂组件;
致动装置,其配置成当所述垂臂组件处于所述第一垂臂组件位置时将力施加到所述垂臂组件,足以使所述垂臂组件从所述第一垂臂位置移动到所述第二垂臂位置;
锯控制单元组件,其配置为当感测到不安全状况时控制所述致动装置将力施加到所述垂臂组件;
马达,其通过齿轮可操作地连接到所述刀轴;以及
装纳所述齿轮的齿轮壳体,所述齿轮壳体由非传导性材料形成,其中:
所述马达的动力轴限定动力轴轴线;
风扇安装在所述马达的动力轴上;并且
所述齿轮壳体还包括多个径向通风口,所述齿轮壳体和所述径向通风口配置成从所述轴线径向向外地排出由所述风扇驱动的所有空气,使得当成形装置安装到刀轴时没有空气接触所述成形装置。
2.根据权利要求1所述的电动工具组件,其特征在于,所述齿轮壳体在所述风扇上延伸。
3.根据权利要求1所述的电动工具组件,其特征在于,所述非传导性材料是塑料。
4.根据权利要求1所述的电动工具组件,其特征在于,还包括:
偏移驱动轴,所述偏移驱动轴通过所述齿轮可操作地连接到所述动力轴并且至少部分地位于所述齿轮壳体内;以及
至少一个第一轴承,所述至少一个第一轴承旋转地支撑所述偏移驱动轴且位于所述齿轮壳体内。
5.根据权利要求4所述的电动工具组件,其特征在于,还包括:
将所述齿轮封闭在所述齿轮壳体内的盖板,所述盖板由非传导性材料制成。
6.根据权利要求5所述的电动工具组件,其特征在于,还包括:
至少一个第二轴承,所述至少一个第二轴承旋转地支撑所述偏移驱动轴,所述至少一个第二轴承由所述盖板直接支撑。
7.一种电动工具组件,包括:
可旋转地支撑刀轴的垂臂组件;
配置成当感测到不安全状况时将所述垂臂组件放置在安全状况下的锯控制单元组件;
包括可操作地连接到所述刀轴的动力轴的马达;以及
部分地封闭所述马达的壳体,所述壳体包括多个径向通风口,所述径向通风口配置成从由所述动力轴限定的轴线径向向外地排出空气,使得当成形装置安装到刀轴时离开壳体的空气不接触所述成形装置。
8.根据权利要求7所述的电动工具组件,其特征在于,所述壳体由非传导性材料形成。
9.根据权利要求8所述的电动工具组件,其特征在于,所述壳体在安装在所述马达的动力轴上的风扇上延伸。
10.根据权利要求9所述的电动工具组件,其特征在于,所述非传导性材料是塑料。
11.根据权利要求9所述的电动工具组件,还包括:
偏移驱动轴,所述偏移驱动轴通过齿轮可操作地连接到所述动力轴并且至少部分地位于所述壳体内;以及
至少一个第一轴承,所述至少一个第一轴承旋转地支撑所述偏移驱动轴且位于所述壳体内。
12.根据权利要求11所述的电动工具组件,还包括:
由非传导性材料制成的盖板;和
旋转地支撑所述偏移驱动轴的至少一个第二轴承,所述至少一个第二轴承由盖板直接支撑。
13.根据权利要求12所述的电动工具组件,还包括:
可操作地连接到所述刀轴和所述动力轴的齿轮,所述齿轮由所述壳体装纳。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562131977P | 2015-03-12 | 2015-03-12 | |
| US201562132004P | 2015-03-12 | 2015-03-12 | |
| US62/131977 | 2015-03-12 | ||
| US62/132004 | 2015-03-12 | ||
| US15/060746 | 2016-03-04 | ||
| US15/060,746 US10493543B2 (en) | 2015-03-12 | 2016-03-04 | Power tool motor with reduced electrical noise |
| PCT/US2016/022027 WO2016145322A1 (en) | 2015-03-12 | 2016-03-11 | Power tool motor with reduced electrical noise |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107548331A CN107548331A (zh) | 2018-01-05 |
| CN107548331B true CN107548331B (zh) | 2020-08-21 |
Family
ID=56879743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201680027409.XA Active CN107548331B (zh) | 2015-03-12 | 2016-03-11 | 带有减小的电气噪声的电动工具马达 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10493543B2 (zh) |
| EP (1) | EP3268184B1 (zh) |
| KR (1) | KR102058403B1 (zh) |
| CN (1) | CN107548331B (zh) |
| AU (1) | AU2016228821B2 (zh) |
| WO (1) | WO2016145322A1 (zh) |
Family Cites Families (166)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2569914A (en) | 1948-08-06 | 1951-10-02 | Appleton Electric Co | Cover clamp |
| US2719547A (en) * | 1952-03-01 | 1955-10-04 | Gjerde Arne | Universally adjustable underbench saw |
| US3490637A (en) | 1968-06-24 | 1970-01-20 | Robert M Pope | Utility marker box |
| US3908139A (en) * | 1974-06-10 | 1975-09-23 | Singer Co | Portable power tools |
| US3909987A (en) | 1974-12-18 | 1975-10-07 | Sr Donald W Maccarthy | Idler pulley adjustment device |
| US4105055A (en) * | 1976-09-01 | 1978-08-08 | Robert Brenta | Portable workshop |
| DE2654521A1 (de) | 1976-12-01 | 1978-06-08 | Mey Kg Maschf Mafell | Nagelvorrichtung |
| DE3306841A1 (de) | 1983-02-26 | 1984-08-30 | Mafell Maschinenfabrik Rudolf Mey GmbH & Co KG, 7238 Oberndorf | Verfahren zur bearbeitung eines werkstoffs oder werkstuecks mittels ultraschall und vorrichtung zur durchfuehrung des verfahrens |
| IT8322561V0 (it) | 1983-08-02 | 1983-08-02 | Black & Decker Inc | Braccio portautensile da applicare a sbalzo su colonne portanti e, dotato di mezzi di guida, in particolare per squadratrici angolari. |
| JPS60142345U (ja) | 1984-03-02 | 1985-09-20 | トヨタ自動車株式会社 | Vベルトの張力調整機構 |
| JPS6114837A (ja) | 1984-06-27 | 1986-01-23 | Nissan Motor Co Ltd | 設備異常通報システム |
| US4631433A (en) * | 1985-05-06 | 1986-12-23 | General Electric Company | Plastic end shield with thermal barrier for dynamoelectric machines |
| CA1223793A (en) * | 1986-06-23 | 1987-07-07 | Jacques Ducharme | Scoring saw |
| US4893946A (en) | 1989-05-15 | 1990-01-16 | Amkor Industries, Inc. | Roller for spinning frame |
| US5006740A (en) * | 1990-06-13 | 1991-04-09 | Milwaukee Electric Tool Corporation | Insulated cooling boot for power tool |
| US5090126A (en) | 1990-07-25 | 1992-02-25 | Higgins Toney D | Rotary tool quick acting retention device |
| US5132629A (en) | 1991-02-25 | 1992-07-21 | Clinton Instrument Company | Apparatus for testing the insulation of an electrical conductor passing through an electrode |
| US5123317A (en) | 1991-03-20 | 1992-06-23 | Ryobi Motor Products Corp. | Support structure for a table saw blade assembly |
| US5177871A (en) | 1991-10-08 | 1993-01-12 | Textron Inc. | Power tool belt tension system |
| US5163883A (en) | 1991-12-04 | 1992-11-17 | General Motors Corporation | Pulley with integral fastener and spacer |
| US5268607A (en) * | 1992-09-09 | 1993-12-07 | Webster Plastics | Molded resin motor housing |
| JPH07298551A (ja) | 1994-04-26 | 1995-11-10 | Hitachi Ltd | 車両用交流発電機 |
| DE29513700U1 (de) * | 1995-08-25 | 1996-09-19 | Siemens AG, 80333 München | Motor-Getriebe-Antriebseinheit, insbesondere für einen Kraftfahrzeug-Fensterheberantrieb o.dgl. |
| US5676319A (en) | 1995-10-23 | 1997-10-14 | Stiggins; Kendy Lee | Garbage disposal system |
| US5734214A (en) * | 1995-11-09 | 1998-03-31 | Ametek, Inc. | Molded through-flow motor assembly |
| EP0875324B1 (en) | 1997-04-29 | 2006-09-27 | Black & Decker Inc. | Table saw |
| US6111643A (en) | 1997-10-28 | 2000-08-29 | Reliance Electric Industrial Company | Apparatus, system and method for determining wear of an article |
| US6044964A (en) | 1998-02-26 | 2000-04-04 | Sony Corporation | Multidirection belt conveyor |
| US6272960B1 (en) | 1998-06-03 | 2001-08-14 | Black & Decker Inc. | Chop saw |
| US5970835A (en) | 1998-09-10 | 1999-10-26 | Black & Decker Inc. | Throat plate for a tool |
| JP2000156124A (ja) | 1998-11-19 | 2000-06-06 | Furukawa Electric Co Ltd:The | ツイストペア線およびそれを撚り合わせたペアケーブル |
| US6536536B1 (en) | 1999-04-29 | 2003-03-25 | Stephen F. Gass | Power tools |
| US6109157A (en) | 1999-06-09 | 2000-08-29 | S-B Power Tool Company | Arbor locking mechanism |
| US6530303B1 (en) | 1999-06-10 | 2003-03-11 | Black & Decker Inc. | Table saw |
| US6255751B1 (en) * | 1999-09-09 | 2001-07-03 | Torex Corporation | Integrated rotary servo actuator |
| US7377199B2 (en) | 2000-09-29 | 2008-05-27 | Sd3, Llc | Contact detection system for power equipment |
| US7024975B2 (en) | 2000-08-14 | 2006-04-11 | Sd3, Llc | Brake mechanism for power equipment |
| US7284467B2 (en) | 2000-08-14 | 2007-10-23 | Sd3, Llc | Apparatus and method for detecting dangerous conditions in power equipment |
| US7055417B1 (en) | 1999-10-01 | 2006-06-06 | Sd3, Llc | Safety system for power equipment |
| US7098800B2 (en) | 2003-03-05 | 2006-08-29 | Sd3, Llc | Retraction system and motor position for use with safety systems for power equipment |
| US7481140B2 (en) | 2005-04-15 | 2009-01-27 | Sd3, Llc | Detection systems for power equipment |
| US6920814B2 (en) | 2000-08-14 | 2005-07-26 | Sd3, Llc | Cutting tool safety system |
| US7100483B2 (en) | 2000-08-14 | 2006-09-05 | Sd3, Llc | Firing subsystem for use in a fast-acting safety system |
| US7353737B2 (en) | 2001-08-13 | 2008-04-08 | Sd3, Llc | Miter saw with improved safety system |
| US7350445B2 (en) | 2003-08-20 | 2008-04-01 | Sd3, Llc | Brake cartridge for power equipment |
| US10589366B2 (en) | 2010-02-19 | 2020-03-17 | Sawstop Holding Llc | Table saw insert with lock-down mechanism |
| US6945148B2 (en) | 2000-09-29 | 2005-09-20 | Sd3, Llc | Miter saw with improved safety system |
| US20050041359A1 (en) | 2003-08-20 | 2005-02-24 | Gass Stephen F. | Motion detecting system for use in a safety system for power equipment |
| US6994004B2 (en) | 2000-09-29 | 2006-02-07 | Sd3, Llc | Table saw with improved safety system |
| US6880440B2 (en) | 2000-09-29 | 2005-04-19 | Sd3, Llc | Miter saw with improved safety system |
| US9981326B2 (en) | 2008-08-18 | 2018-05-29 | Sawstop Holding Llc | Table saw |
| US7077039B2 (en) | 2001-11-13 | 2006-07-18 | Sd3, Llc | Detection system for power equipment |
| US7171879B2 (en) | 2001-07-02 | 2007-02-06 | Sd3, Llc | Discrete proximity detection system |
| US20030037651A1 (en) | 2001-08-13 | 2003-02-27 | Gass Stephen F. | Safety systems for power equipment |
| US6877410B2 (en) | 2000-09-29 | 2005-04-12 | Sd3, Llc | Miter saw with improved safety system |
| US7225712B2 (en) | 2000-08-14 | 2007-06-05 | Sd3, Llc | Motion detecting system for use in a safety system for power equipment |
| US6957601B2 (en) | 2000-08-14 | 2005-10-25 | Sd3, Llc | Translation stop for use in power equipment |
| US9724840B2 (en) | 1999-10-01 | 2017-08-08 | Sd3, Llc | Safety systems for power equipment |
| US7600455B2 (en) * | 2000-08-14 | 2009-10-13 | Sd3, Llc | Logic control for fast-acting safety system |
| US7308843B2 (en) | 2000-08-14 | 2007-12-18 | Sd3, Llc | Spring-biased brake mechanism for power equipment |
| CN100343030C (zh) | 1999-10-01 | 2007-10-17 | Sd3有限责任公司 | 具有运转结构的机器 |
| US7536238B2 (en) | 2003-12-31 | 2009-05-19 | Sd3, Llc | Detection systems for power equipment |
| US7707920B2 (en) * | 2003-12-31 | 2010-05-04 | Sd3, Llc | Table saws with safety systems |
| US7197969B2 (en) | 2001-09-24 | 2007-04-03 | Sd3, Llc | Logic control with test mode for fast-acting safety system |
| US7509899B2 (en) * | 2000-08-14 | 2009-03-31 | Sd3, Llc | Retraction system for use in power equipment |
| US20030131703A1 (en) * | 2002-01-16 | 2003-07-17 | Gass Stephen F. | Apparatus and method for detecting dangerous conditions in power equipment |
| JP5043267B2 (ja) | 1999-10-01 | 2012-10-10 | エスディースリー・エルエルシー | 動力装置用の安全システム |
| US6945149B2 (en) | 2001-07-25 | 2005-09-20 | Sd3, Llc | Actuators for use in fast-acting safety systems |
| US6857345B2 (en) | 2000-08-14 | 2005-02-22 | Sd3, Llc | Brake positioning system |
| US7000514B2 (en) | 2001-07-27 | 2006-02-21 | Sd3, Llc | Safety systems for band saws |
| US7231856B2 (en) | 2001-06-13 | 2007-06-19 | Sd3, Llc | Apparatus and method for detecting dangerous conditions in power equipment |
| US7290472B2 (en) | 2002-01-14 | 2007-11-06 | Sd3, Llc | Miter saw with improved safety system |
| US7210383B2 (en) | 2000-08-14 | 2007-05-01 | Sd3, Llc | Detection system for power equipment |
| US7137326B2 (en) | 2000-08-14 | 2006-11-21 | Sd3, Llc | Translation stop for use in power equipment |
| US7789002B2 (en) * | 2000-09-29 | 2010-09-07 | Sd3, Llc | Table saw with improved safety system |
| US7350444B2 (en) * | 2000-08-14 | 2008-04-01 | Sd3, Llc | Table saw with improved safety system |
| US8061245B2 (en) | 2000-09-29 | 2011-11-22 | Sd3, Llc | Safety methods for use in power equipment |
| US7472634B2 (en) | 2003-08-20 | 2009-01-06 | Sd3, Llc | Woodworking machines with overmolded arbors |
| US6573625B2 (en) * | 2000-03-29 | 2003-06-03 | Asmo Co., Ltd. | Motor device having water-proof brush holder |
| DE20007037U1 (de) | 2000-04-17 | 2000-07-20 | Mafell AG, 78727 Oberndorf | Tischkreissäge |
| US6813983B2 (en) | 2000-09-29 | 2004-11-09 | Sd3, Llc | Power saw with improved safety system |
| US6826988B2 (en) | 2000-09-29 | 2004-12-07 | Sd3, Llc | Miter saw with improved safety system |
| JP3815211B2 (ja) | 2000-11-24 | 2006-08-30 | 松下電工株式会社 | 電動丸鋸 |
| DE10125582A1 (de) * | 2001-05-25 | 2002-12-05 | Webasto Vehicle Sys Int Gmbh | Antriebsvorrichtung |
| WO2003006213A2 (en) | 2001-07-11 | 2003-01-23 | Black & Decker Inc. | Power tool safety mechanisms |
| US6986185B2 (en) | 2001-10-30 | 2006-01-17 | Applied Materials Inc. | Methods and apparatus for determining scrubber brush pressure |
| JP2003153583A (ja) | 2001-11-12 | 2003-05-23 | Denso Corp | 直流サーボモータのモニタ装置およびロボットのモニタシステム |
| JP3641238B2 (ja) * | 2001-12-26 | 2005-04-20 | アスモ株式会社 | ブラシ保持装置、回転電機の組み付け方法 |
| US6898854B2 (en) | 2002-06-07 | 2005-05-31 | Black & Decker Inc. | Modular power tool |
| US6900728B2 (en) | 2002-07-29 | 2005-05-31 | Home Depot U.S.A., Inc. | System to detect user entry into a defined danger zone |
| GB0218198D0 (en) * | 2002-08-06 | 2002-09-11 | Johnson Electric Sa | Fan |
| US6808333B2 (en) | 2002-10-30 | 2004-10-26 | Cnh Canada, Ltd | Pivot pin assembly |
| US6748838B1 (en) | 2002-12-06 | 2004-06-15 | Chang Chin-Chin | Table saw having a rotation structure |
| DE10261791A1 (de) | 2002-12-23 | 2004-07-15 | Robert Bosch Gmbh | Vorrichtung zum Berührungsschutz und Verfahren zum Schutz von dem Berühren eines beweglichen Teils |
| KR101046666B1 (ko) | 2002-12-25 | 2011-07-06 | 에이씨티 엘에스아이 인크. | 정전 용량 검출형 근접 센서 |
| US7698975B2 (en) * | 2003-01-31 | 2010-04-20 | Techtronic Power Tools Technology Limited | Table saw with cutting tool retraction system |
| US20040194594A1 (en) | 2003-01-31 | 2004-10-07 | Dils Jeffrey M. | Machine safety protection system |
| US7290474B2 (en) * | 2003-04-29 | 2007-11-06 | Black & Decker Inc. | System for rapidly stopping a spinning table saw blade |
| US6922153B2 (en) * | 2003-05-13 | 2005-07-26 | Credo Technology Corporation | Safety detection and protection system for power tools |
| JP3903956B2 (ja) * | 2003-05-23 | 2007-04-11 | 日産自動車株式会社 | 複軸多層モータ |
| DE10329826A1 (de) | 2003-06-27 | 2005-01-13 | Festool Gmbh | Schleifteller |
| US20050081318A1 (en) * | 2003-10-20 | 2005-04-21 | Boutilier Wayne A. | Scraper and safety sheath |
| DE202004012468U1 (de) | 2003-11-21 | 2004-11-04 | Festool Gmbh | Tischkreissäge |
| DE502004003126D1 (de) | 2004-02-13 | 2007-04-19 | Festool Gmbh | Staubabsaugvorrichtung einer Oberfräse |
| US7134373B1 (en) | 2004-02-23 | 2006-11-14 | James Perry Vice | Throat insert for a table saw |
| KR100529377B1 (ko) | 2004-03-15 | 2005-11-17 | 한국전력공사 | 고압 회전기의 부분방전 감시 시스템 |
| US20060032355A1 (en) | 2004-08-11 | 2006-02-16 | Wang Wang T | Cutting device for dual-blade cutting tool |
| US7628101B1 (en) | 2006-03-13 | 2009-12-08 | Power Tool Institute | Pyrotechnic drop mechanism for power tools |
| US20060201300A1 (en) * | 2005-03-11 | 2006-09-14 | Schwaiger Barry M | Cutting tool and parts and accessories therefor |
| US8006596B2 (en) | 2005-03-11 | 2011-08-30 | Walter Meier (Manufacturing) Inc. | Cutting tool and parts and accessories therefor |
| FR2883606B1 (fr) | 2005-03-24 | 2010-03-19 | Snpe Materiaux Energetiques | Actionneur pyrotechnique muni d'un organe regulateur de pression |
| US7804204B1 (en) | 2005-05-19 | 2010-09-28 | Power Tool Institute | Capacitive sensing system for power cutting tool |
| DE102005060324B4 (de) | 2005-12-16 | 2021-03-18 | Robert Bosch Gmbh | Erfassung des Verschleißes einer Motoransteuerung |
| TWI280184B (en) * | 2006-03-23 | 2007-05-01 | Chi Whi Ind Inc | Box knife |
| TWM297804U (en) | 2006-03-30 | 2006-09-21 | Durq Machinery Corp | Steady lifting and lowering structure for the saw blade of bench saw |
| US7459817B2 (en) * | 2006-08-15 | 2008-12-02 | Bombardier Transportation Gmbh | Semi-enclosed AC motor |
| CN200958682Y (zh) | 2006-09-15 | 2007-10-10 | 东莞市凌峰信息科技有限公司 | 智能型人身安全保护装置 |
| CN201012414Y (zh) | 2007-01-29 | 2008-01-30 | 圣杰机器工业股份有限公司 | 台锯机的劈刀调整结构 |
| KR101275733B1 (ko) | 2007-05-07 | 2013-06-14 | (주)신한전기 | 전자식 팽창밸브 |
| US8618943B2 (en) | 2007-05-24 | 2013-12-31 | Cutsforth, Inc. | Brush holder assembly monitoring apparatus, assembly, system and method |
| US8099254B2 (en) | 2008-01-11 | 2012-01-17 | Minnesota Wire and Cable | Elastomeric conductor and shield fault detection |
| JP2010023186A (ja) * | 2008-07-18 | 2010-02-04 | Makita Corp | 切断機 |
| US8127648B2 (en) * | 2008-07-31 | 2012-03-06 | Robert Bosch Gmbh | Table saw guard system |
| CN201239972Y (zh) | 2008-08-08 | 2009-05-20 | 山东工友集团股份有限公司 | 精密裁板锯的划线锯皮带张紧装置 |
| US7739934B2 (en) | 2008-09-08 | 2010-06-22 | Power Tool Institute | Detection system for power tool |
| PL2166647T3 (pl) * | 2008-09-19 | 2018-09-28 | Abb Schweiz Ag | Samowentylowany silnik trakcyjny |
| US8919231B2 (en) | 2008-11-19 | 2014-12-30 | Power Tool Institute | Safety mechanisms for power tools |
| US8122798B1 (en) | 2008-11-19 | 2012-02-28 | Power Tool Institute | Power cutting tool with proximity sensing system |
| US8082825B2 (en) | 2009-06-09 | 2011-12-27 | Butler David J | Health and safety system for a table saw |
| DE102009027317B4 (de) | 2009-06-30 | 2019-12-05 | Robert Bosch Gmbh | Werkzeug |
| DE102010025586B4 (de) * | 2009-07-01 | 2021-04-15 | Johnson Electric International AG | Elektrowerkzeug |
| US9079258B2 (en) | 2009-08-26 | 2015-07-14 | Robert Bosch Gmbh | Table saw with belt stop |
| US8316748B2 (en) | 2009-08-26 | 2012-11-27 | Robert Bosch Gmbh | Table saw with alignment plate |
| US8297159B2 (en) | 2009-08-26 | 2012-10-30 | Robert Bosch Gmbh | Table saw with dropping blade |
| US10029386B2 (en) | 2009-08-26 | 2018-07-24 | Robert Bosch Tool Corporation | Table saw with positive locking mechanism |
| US8245612B2 (en) | 2009-08-26 | 2012-08-21 | Robert Bosch Gmbh | Table saw with swing arm support |
| US8286537B2 (en) | 2009-08-26 | 2012-10-16 | Robert Bosch Gmbh | Table saw with pressure operated actuator |
| US8210076B2 (en) * | 2009-08-26 | 2012-07-03 | Robert Bosch Gmbh | Table saw with mechanical fuse |
| US8327744B2 (en) | 2009-08-26 | 2012-12-11 | Robert Bosch Gmbh | Table saw with reset mechanism |
| US8291801B2 (en) | 2009-08-26 | 2012-10-23 | Robert Bosch Gmbh | Table saw with ratchet mechanism |
| US8250957B2 (en) | 2009-08-26 | 2012-08-28 | Robert Bosch Gmbh | Table saw with linkage drop system |
| US8186258B2 (en) | 2009-08-26 | 2012-05-29 | Robert Bosch Gmbh | Table saw with actuator reset mechanism |
| KR100981680B1 (ko) | 2009-09-15 | 2010-09-10 | 조지현 | 잠금 및 개방 기능을 갖는 맨홀뚜껑 |
| US10384281B2 (en) * | 2012-03-02 | 2019-08-20 | Sawstop Holding Llc | Actuators for power tool safety systems |
| WO2011043746A1 (en) | 2009-10-07 | 2011-04-14 | Bahtiyar Tasyagan | A reserve bullet store |
| CN101733478B (zh) | 2009-12-03 | 2014-01-08 | 青岛地恩地机电科技股份有限公司 | 台锯传动机构 |
| US8648016B2 (en) | 2010-02-08 | 2014-02-11 | Robert Bosch Gmbh | Array with extended dynamic range and associated method |
| KR101179734B1 (ko) | 2010-03-19 | 2012-09-04 | 룰런즈라버코리아 주식회사 | 환경친화형 전기전도성 벨트 및 그것의 제조방법 |
| CN201677207U (zh) | 2010-05-13 | 2010-12-22 | 河南省中原内配股份有限公司 | 一种计数控制装置 |
| US8534174B2 (en) | 2010-09-27 | 2013-09-17 | Power Tool Institute | Pyrotechnic actuator and power cutting tool with safety reaction system having such pyrotechnic actuator |
| US8726773B2 (en) * | 2010-10-19 | 2014-05-20 | Robert Bosch Gmbh | Table saw having airflow apparatus |
| CN102346466A (zh) | 2011-06-17 | 2012-02-08 | 武汉理工大学 | 一种金属锯床远程监控装置 |
| KR101266475B1 (ko) | 2011-07-07 | 2013-05-27 | 연세대학교 산학협력단 | 케이블 결함 진단 시스템 및 방법 |
| US8972219B2 (en) | 2012-02-22 | 2015-03-03 | General Electric Company | Method and system of monitoring electrical brushes |
| DE102012206863A1 (de) | 2012-04-25 | 2013-10-31 | Robert Bosch Gmbh | Diagnosevorrichtung für einen Kommutatormotor |
| US20140107853A1 (en) | 2012-06-26 | 2014-04-17 | Black & Decker Inc. | System for enhancing power tools |
| US8943937B2 (en) | 2012-09-28 | 2015-02-03 | Robert Bosch Gmbh | Power tool with circuit for sensing contact between an implement and an object |
| US9702916B2 (en) | 2012-09-28 | 2017-07-11 | Robert Bosch Tool Corporation | System and method for reducing false positive detection between a human and a moving implement in a power tool |
| US20140182430A1 (en) | 2012-12-31 | 2014-07-03 | Robert Bosch Gmbh | Saw Device with Detection System |
| US9252643B2 (en) | 2013-03-14 | 2016-02-02 | Cutsforth, Inc. | System and method for monitoring the status of one or more components of an electrical machine |
| US9517516B2 (en) | 2013-03-14 | 2016-12-13 | Robert Bosch Tool Corporation | Blade drop power tool with dust management |
| US9511429B2 (en) | 2013-03-15 | 2016-12-06 | Robert BoschTool Corporation | Blade drop for power device and method of manufacturing thereof |
| CN203502787U (zh) | 2013-10-15 | 2014-03-26 | 丽水学院 | 一种金属带锯床远程无线故障诊断装置 |
| CN203786187U (zh) | 2014-04-29 | 2014-08-20 | 重庆勤智科技有限公司 | 在线式发电机碳刷电流全面监测装置 |
| CN104049244B (zh) | 2014-06-23 | 2017-01-04 | 中国人民解放军63698部队 | 基于时域特征值分析的雷达测速机碳刷磨损识别方法 |
| US10189098B2 (en) * | 2015-03-12 | 2019-01-29 | Robert Bosch Tool Corporation | Diagnostic and maintenance operation for a saw |
-
2016
- 2016-03-04 US US15/060,746 patent/US10493543B2/en active Active
- 2016-03-11 AU AU2016228821A patent/AU2016228821B2/en active Active
- 2016-03-11 EP EP16762606.8A patent/EP3268184B1/en active Active
- 2016-03-11 WO PCT/US2016/022027 patent/WO2016145322A1/en active Application Filing
- 2016-03-11 CN CN201680027409.XA patent/CN107548331B/zh active Active
- 2016-03-11 KR KR1020177028083A patent/KR102058403B1/ko active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| EP3268184A4 (en) | 2019-03-20 |
| AU2016228821A1 (en) | 2017-10-05 |
| EP3268184B1 (en) | 2021-06-16 |
| CN107548331A (zh) | 2018-01-05 |
| EP3268184A1 (en) | 2018-01-17 |
| KR102058403B1 (ko) | 2019-12-24 |
| US20160263679A1 (en) | 2016-09-15 |
| US10493543B2 (en) | 2019-12-03 |
| WO2016145322A1 (en) | 2016-09-15 |
| KR20170123687A (ko) | 2017-11-08 |
| AU2016228821B2 (en) | 2018-12-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10507537B2 (en) | Method of operating a power tool with a protected coupling plate | |
| CN107530899B (zh) | 带有垂臂轨道托架的电动工具 | |
| CN107548338B (zh) | 动力工具组件和将致动器定位在动力工具组件中的方法 | |
| CN107530900B (zh) | 具有烟火式闭锁的动力工具和操作该动力工具的方法 | |
| CN107567364B (zh) | 具有受保护的电路板定向的动力工具 | |
| CN107530796B (zh) | 具有改进的带张紧的电动工具 | |
| CN107530797B (zh) | 带有电气隔离的刀轴的台锯 | |
| CN107548328B (zh) | 垂臂重置方法 | |
| CN107530799B (zh) | 具有带轮对准机构的台锯机 | |
| EP3268183B1 (en) | Power tool drop arm with offset ribbing | |
| EP3268182B1 (en) | Saw assembly with arbor lock and method of positioning a saw blade on a table saw assembly | |
| CN107548331B (zh) | 带有减小的电气噪声的电动工具马达 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |