CN1056668C - 储压器燃油系统的电控系统 - Google Patents
储压器燃油系统的电控系统 Download PDFInfo
- Publication number
- CN1056668C CN1056668C CN95107103A CN95107103A CN1056668C CN 1056668 C CN1056668 C CN 1056668C CN 95107103 A CN95107103 A CN 95107103A CN 95107103 A CN95107103 A CN 95107103A CN 1056668 C CN1056668 C CN 1056668C
- Authority
- CN
- China
- Prior art keywords
- fuel
- valve
- control
- signal
- engine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000446 fuel Substances 0.000 title claims abstract description 289
- 238000000034 method Methods 0.000 title claims description 173
- 238000002347 injection Methods 0.000 claims abstract description 191
- 239000007924 injection Substances 0.000 claims abstract description 191
- 230000008569 process Effects 0.000 claims description 116
- 238000002485 combustion reaction Methods 0.000 claims description 42
- 239000000295 fuel oil Substances 0.000 claims description 42
- 230000014509 gene expression Effects 0.000 claims description 25
- 230000008859 change Effects 0.000 claims description 24
- 238000000465 moulding Methods 0.000 claims description 24
- 230000006698 induction Effects 0.000 claims description 17
- 238000001514 detection method Methods 0.000 claims description 12
- 230000033001 locomotion Effects 0.000 claims description 12
- 238000010304 firing Methods 0.000 claims description 11
- 230000001965 increasing effect Effects 0.000 claims description 11
- 230000001939 inductive effect Effects 0.000 claims description 10
- 238000003860 storage Methods 0.000 claims description 9
- 230000001360 synchronised effect Effects 0.000 claims description 7
- 238000012360 testing method Methods 0.000 claims description 7
- 239000012530 fluid Substances 0.000 claims description 6
- 229920006395 saturated elastomer Polymers 0.000 claims description 6
- 238000009434 installation Methods 0.000 claims description 4
- 239000010761 intermediate fuel oil Substances 0.000 claims description 3
- 230000005284 excitation Effects 0.000 claims description 2
- 239000003607 modifier Substances 0.000 claims 1
- 238000012797 qualification Methods 0.000 claims 1
- 238000005086 pumping Methods 0.000 abstract description 46
- 230000001934 delay Effects 0.000 abstract description 2
- 230000003213 activating effect Effects 0.000 abstract 1
- 238000004422 calculation algorithm Methods 0.000 description 171
- 101100225051 Saccharomyces cerevisiae (strain ATCC 204508 / S288c) ECM13 gene Proteins 0.000 description 69
- 239000003921 oil Substances 0.000 description 52
- 238000012545 processing Methods 0.000 description 36
- 238000013461 design Methods 0.000 description 19
- 239000007921 spray Substances 0.000 description 17
- 230000008901 benefit Effects 0.000 description 16
- 230000006870 function Effects 0.000 description 14
- 230000000694 effects Effects 0.000 description 13
- 230000006835 compression Effects 0.000 description 11
- 238000007906 compression Methods 0.000 description 11
- 238000010586 diagram Methods 0.000 description 11
- 238000005507 spraying Methods 0.000 description 11
- 230000004044 response Effects 0.000 description 10
- 238000005516 engineering process Methods 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 6
- 230000004087 circulation Effects 0.000 description 6
- 230000006872 improvement Effects 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 230000007246 mechanism Effects 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 6
- 238000004886 process control Methods 0.000 description 6
- 238000003745 diagnosis Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 5
- 239000010705 motor oil Substances 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 230000009466 transformation Effects 0.000 description 5
- 230000007704 transition Effects 0.000 description 5
- 230000005540 biological transmission Effects 0.000 description 4
- 230000005611 electricity Effects 0.000 description 4
- JEIPFZHSYJVQDO-UHFFFAOYSA-N ferric oxide Chemical compound O=[Fe]O[Fe]=O JEIPFZHSYJVQDO-UHFFFAOYSA-N 0.000 description 4
- 238000003780 insertion Methods 0.000 description 4
- 230000037431 insertion Effects 0.000 description 4
- 238000012423 maintenance Methods 0.000 description 4
- 230000004913 activation Effects 0.000 description 3
- 230000007423 decrease Effects 0.000 description 3
- 238000009826 distribution Methods 0.000 description 3
- 238000001914 filtration Methods 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- 230000011664 signaling Effects 0.000 description 3
- 230000005355 Hall effect Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 2
- 230000000712 assembly Effects 0.000 description 2
- 238000000429 assembly Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 230000002950 deficient Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 230000005672 electromagnetic field Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000008439 repair process Effects 0.000 description 2
- 230000035807 sensation Effects 0.000 description 2
- 108010076504 Protein Sorting Signals Proteins 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000033228 biological regulation Effects 0.000 description 1
- 230000000903 blocking effect Effects 0.000 description 1
- 239000003990 capacitor Substances 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000002405 diagnostic procedure Methods 0.000 description 1
- 230000008034 disappearance Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000005674 electromagnetic induction Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 238000012840 feeding operation Methods 0.000 description 1
- 239000002828 fuel tank Substances 0.000 description 1
- 239000011551 heat transfer agent Substances 0.000 description 1
- 230000008676 import Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 230000014759 maintenance of location Effects 0.000 description 1
- 238000007726 management method Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012067 mathematical method Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000010587 phase diagram Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- -1 simultaneously Substances 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 239000013585 weight reducing agent Substances 0.000 description 1
Images
























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/38—Controlling fuel injection of the high pressure type
- F02D41/3809—Common rail control systems
- F02D41/3836—Controlling the fuel pressure
- F02D41/3845—Controlling the fuel pressure by controlling the flow into the common rail, e.g. the amount of fuel pumped
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/30—Controlling fuel injection
- F02D41/38—Controlling fuel injection of the high pressure type
- F02D41/3809—Common rail control systems
- F02D41/3827—Common rail control systems for diesel engines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M41/00—Fuel-injection apparatus with two or more injectors fed from a common pressure-source sequentially by means of a distributor
- F02M41/16—Fuel-injection apparatus with two or more injectors fed from a common pressure-source sequentially by means of a distributor characterised by the distributor being fed from a constant pressure source, e.g. accumulator or constant pressure positive displacement pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M45/00—Fuel-injection apparatus characterised by having a cyclic delivery of specific time/pressure or time/quantity relationship
- F02M45/02—Fuel-injection apparatus characterised by having a cyclic delivery of specific time/pressure or time/quantity relationship with each cyclic delivery being separated into two or more parts
- F02M45/04—Fuel-injection apparatus characterised by having a cyclic delivery of specific time/pressure or time/quantity relationship with each cyclic delivery being separated into two or more parts with a small initial part, e.g. initial part for partial load and initial and main part for full load
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M45/00—Fuel-injection apparatus characterised by having a cyclic delivery of specific time/pressure or time/quantity relationship
- F02M45/12—Fuel-injection apparatus characterised by having a cyclic delivery of specific time/pressure or time/quantity relationship providing a continuous cyclic delivery with variable pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M59/00—Pumps specially adapted for fuel-injection and not provided for in groups F02M39/00 -F02M57/00, e.g. rotary cylinder-block type of pumps
- F02M59/44—Details, components parts, or accessories not provided for in, or of interest apart from, the apparatus of groups F02M59/02 - F02M59/42; Pumps having transducers, e.g. to measure displacement of pump rack or piston
- F02M59/46—Valves
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M59/00—Pumps specially adapted for fuel-injection and not provided for in groups F02M39/00 -F02M57/00, e.g. rotary cylinder-block type of pumps
- F02M59/44—Details, components parts, or accessories not provided for in, or of interest apart from, the apparatus of groups F02M59/02 - F02M59/42; Pumps having transducers, e.g. to measure displacement of pump rack or piston
- F02M59/46—Valves
- F02M59/466—Electrically operated valves, e.g. using electromagnetic or piezoelectric operating means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M63/00—Other fuel-injection apparatus having pertinent characteristics not provided for in groups F02M39/00 - F02M57/00 or F02M67/00; Details, component parts, or accessories of fuel-injection apparatus, not provided for in, or of interest apart from, the apparatus of groups F02M39/00 - F02M61/00 or F02M67/00; Combination of fuel pump with other devices, e.g. lubricating oil pump
- F02M63/0003—Fuel-injection apparatus having a cyclically-operated valve for connecting a pressure source, e.g. constant pressure pump or accumulator, to an injection valve held closed mechanically, e.g. by springs, and automatically opened by fuel pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
- F02D2041/2017—Output circuits, e.g. for controlling currents in command coils using means for creating a boost current or using reference switching
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
- F02D2041/202—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit
- F02D2041/2055—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit with means for determining actual opening or closing time
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/20—Output circuits, e.g. for controlling currents in command coils
- F02D2041/202—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit
- F02D2041/2058—Output circuits, e.g. for controlling currents in command coils characterised by the control of the circuit using information of the actual current value
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/22—Safety or indicating devices for abnormal conditions
- F02D2041/224—Diagnosis of the fuel system
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02M—SUPPLYING COMBUSTION ENGINES IN GENERAL WITH COMBUSTIBLE MIXTURES OR CONSTITUENTS THEREOF
- F02M2200/00—Details of fuel-injection apparatus, not otherwise provided for
- F02M2200/40—Fuel-injection apparatus with fuel accumulators, e.g. a fuel injector having an integrated fuel accumulator
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Oil, Petroleum & Natural Gas (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Fuel-Injection Apparatus (AREA)
Abstract
一种数字式电子控制系统、监视和控制发动机供油系统的工作,用于多个气缸的喷射激活信号通过一个信号控制线传到用于一个独立的喷射器电磁阀的驱动回路中、而控制储压器燃油泵的信号则传送到泵送控制电磁阀中。对喷射信号加以控制,以便在喷射期间改变供油速率。后EMF感应回路测量阀开启的延迟,而控制系统可以补偿阀的延迟,喷射电磁阀输出信号脉冲的可变气缸特性延迟是预先编程的,以补偿通向各喷射器的燃油管路长度的不同。
Description
本发明涉及一种用于控制供入内燃机燃烧室的燃油的系统和方法,在本发明的实施例中,本发明涉及的是一种用于多缸压燃式发动机的系统和方法,所述的发动机中包括一个高压燃油泵和燃油储压器。
75年来内燃机一直作为人类的主要的运输能源。无论怎样描述内燃机的重要性和工程技术人员为其的完善所做的不懈努力都是不过分的。目前人们已经充分地认识到内燃机设计的技巧就是:大多数“新”的发动机设计是在对现有的多种已知方案的选择中进行的。例如,牺牲发动机的燃油经济性可以很容易地改善其动力输出曲线,增加成本则可以消除污染和提高可靠性。通常如果同时牺牲燃油经济性和成本的话,那么还可以实现其它目的,如增加功率、缩小尺寸和/或减轻重量。
对于内燃机的性能和成本来说,发动机的燃油系统通常最具重要性。所以到目前为止在对内燃机所作的改进的所有工程技术努力中,用于内燃机的燃油系统的研究是其中最主要的部分。因此,今天的发动机设计人员对已知的燃油系统进行多种选择和可能的排列,设计人员的设计工作主要包括在如下的各种因素之间进行极其复杂和细致的平衡,即:成本、尺寸、可靠性、性能、制造容易以及与现有的发动机设计的通用性。
由于目前公众的要求和政府的管理都有提高燃油效率和保持环境的要求,设计人员的设计面临了越来越多的困难。从燃油系统设计已成熟的角度来看,在未来的燃油系统的改进中,同时兼顾提高发动机性能和降低污染是非常困难的,然而由于对环境问题的广泛关注和因此而产生的各种标准,又迫切需要进行这方面的改进。满足上述的各项标准(特别是关于压燃式发动机的标准)需要对燃油系统进行较大的改进,以避免因燃油系统的成本和/或发动机再设计成本的增加而加重消费者的负担。
CUMMINS公司(本发明的受让人)研制出了一种全新的供油系统,该系统具有一个新的泵油和分配结构,以满足对各种相互矛盾的设计因素的改进的需求。
简而言之,在一个实施例中,上述新的供油系统包括一个由泵驱动的直列式往复凸轮,所述的泵带有一个或多个高压泵缸,泵缸将燃油供入一个高压储压器中,随后燃油通过一个机械分配阀将燃油导入多个发动机的气缸。双联泵控制阀可以在可变的时刻打开和关闭,以改变有效的泵的位移并保持储压器的燃油压力,使之独立于发动机速度。在储压器和分配器之间设有一个或多个喷射控制阀,这样上述的一个或多个阀顺序控制供入各所缸中的供油时刻和供油量。
在这种改进的供油系统的发展过程中需要一种改进的电控系统,这一控制系统特别适用于控制这种新的系统。实际上,本发明人已经发现该燃油系统的主要优点(低成本、高燃油效率和少污染)只有通过设置一个先进的电控系统对才能得以实现,该电控系统具有集中的控制并能对构成该燃油系统的不同的燃料流量控制机构进行监控。采用这种电子控制可以实现不同喷射过程期间供油速率的改变、控制和操作性能的改善。此外在本发明的一个特殊的电子控制系统中,由于采用了新的控制算法和信号图形,所以本发明可以使用许多通用的燃油系统中先进的设计。
同样,在现有技术中也没有提供或建议这样一种燃油喷射系统,该喷射系统能将一个直列往复泵、一个储压器、一个单一的喷射控制阀和一个燃油分配器很好地结合在一起,以前的控制系统也没能提供一种集中的电子控制系统,该系统可以控制一个直列往复泵,以便通过所有气缸的燃烧将高压储压器内的油压保持在需要的值上,并且同时控制一个单一的喷射控制阀,从而依次精确控制各气缸的喷射定时和油量。
当然在现有技术中也有各种的电控系统,这些系统的控制算法和信号输出适用于其它类型的燃油喷射系统。在Komatsu的日本专利申请文件57-68532中便公开了一种采用电子控制对燃油喷射进行控制的方法。该对比文件中公开了一种电控高压泵和一个用以接收上述泵的输出的储压器,高压泵的输出通过一分配器型的阀和相应的供油管将燃油供给多个喷射嘴。储压器中的压力由第一电控单元根据感应的储压器压力和发动机位置进行控制,以便有效地控制高压泵的有效位移。但是在该系统中,喷射定时和喷射量是由另一个电子单元通过对分配器内转动阀件的控制而加以改变的。因此,在该系统中没有对喷射定时、喷射速率和燃油压力进行集中控制,以精确控制发动机内的燃油。
在现有技术的另外一些系统中虽然具有对储压器和喷嘴进行电子控制的一个单一的控制单元,但是类似地,在这些系统中没有提供用一个集中的电控系统对多腔室泵和一个单一的喷射电磁阀的控制。在下述各文献中公开了这样的系统:其中一个油管储存高压油泵的输出,并通过多个喷嘴将燃油送入气缸中,各喷嘴直接与油管和各相应的气缸直接相联。每个喷嘴包括一个单一的集成的电磁阀,以控制从储压器供入各气缸中的燃油流的定时和流量。上述的文献是:授于Beck等人的美国Re专利33,270,授于Miyaki等人的美国专利5,094,216,授于Martin的美国专利5,109,822,授于Miyaki等人的美国专利4,777,921和Miyaki等人的SAE会刊第910252号文章,文章名称为:“用于柴油机的新的电控燃油喷射系统ECD-U2的发展”。在上述系统中,油管压力可根据需要独立于发动机的速度进行调整。在所公开的控制形式中可以有多个输出端,每一端控制用于一个发动机的一个喷射阀或操作泵机构。
类似地,授予Osuka(受让人为Nippondenso)的美国专利5,201,294中公开了一种单一的电子控制单元(ECU),该控制单元可以控制多个高压泵并设置多条独立的输出线,每条输出线将控制信号传输给一个与发动机气缸相联的喷射阀。Osuka的ECU可以根据公共管路中的压力对泵进行操纵,所述的公共管路中采用了反馈控制技术以保持所需的压力水平。气缸喷射控制电磁阀也类似地根据发动机工况根据ECU的控制指令进行操作,所述的发动机工况由发动机速度传感器和加速传感器检测得到。对公共管路中的压力进行监视,以检测一个或两个泵是否失效。Osuka的欧洲专利申请0,501,463中公开的系统与前者类似,只是对如何根据计算出的定时值同步产生用于泵送电磁阀的控制信号进行了更加详细的说明,在所述的控制系统中具有一个由发动机位置感应所产生的中断过程来起动的部分。在Nippondenso的另一份文献(日本专利申请05-106495)中同样也描述了一个对气缸的喷射脉冲和公共油管压力进行集中控制的系统。但是在上述文件中,上述各种Nippondenso控制系统在多个与各气缸喷射器电磁阀相连的管路中产生的喷射信号是不同的。
授予Crowley等人的美国专利5,133,645中公开了一种带有电控单元的燃油喷射系统,该控制单元通过向一个独立的电子分配单元输送低压和低能的信号来控制一个高压燃油泵和各气缸中的喷嘴。
授予Stepper等人的美国专利5,137,000和授予Hapka等人(CUMMINS电子公司)的美国专利5,070,832中公开了一种电子的发动机控制系统,该系统可以控制燃油喷射和其它功能的进行。但是,在该系统中不能对储压器中的燃油压力进行直接的控制,也无法使用多个独立的受控燃油喷射电磁阀。
在一些现有的系统中常用一个“升压能量”回路来产生一个电磁阀激活电压,该激活电压大大高于系统的电池电压,以便根据控制信号尽快激活电磁阀。为使用带有上述各类控制系统的升压回路,应当设置多个升压回路或一个分配开关回路,以便将该升压输入相应的喷射电磁阀。无论采用何种方案都会使用大量高成本的大功率处理部件。
有一种减少喷射初期喷入气缸的初始燃油量的方法,它是通过降低喷射初期送入喷射组件中的燃油的压力实现的。目前已研制出多种装置,以控制在喷射初期供入喷嘴的燃油压力,进而改变供入喷嘴组件的燃油流率。例如在美国专利3,718,283、3,747,857、4,811,715和5,029,568公开了与各喷射器组件相连的装置,以产生燃油流率受限制的初始阶段和其后的燃油流率基本不受限制阶段,在后一阶段中燃油通过喷射孔喷入燃烧室中。但是,这些流率控制装置不是电子控制的,并且还需要对多点喷射系统中的各燃油喷射器组件进行改进,这样导致了该喷射系统的成本和复杂程度的增加。在授予Kuroyanagi等人的美国专利4,469,068中公开了一种分配式燃油喷射装置,该装置包括一个可变容积储压器,以改变燃油喷射速率,实现有效的燃烧。但是该装置采用了一个用以改变喷射速率的复合式储压器控制系统,且该装置可与一个往复柱塞式分配器一起使用,如上所述,Miyaki的SAE报告中公开了一种喷射流率控制曲线,以便在喷射期间使供油速率平缓增加,但它是采用液压装置来形成这种流率线型的,并且它也没有设置产生一定线型的喷射流率的第二电磁阀和精确顺序激活喷射电磁阀的控制回路。上述文件中均未提供用于燃油喷射系统的电控系统,它可以控制电磁阀,依次对喷射期间的可变流率进行控制。
总之,目前需要一种实用的、低成本的控制系统,该系统可与一个新的燃油喷射波形协同工作,在较宽的发动机式工作范围内同时满足污染控制和改进操作性能等各种相矛盾的要求。
本发明的一个总的目的是克服现有技术中的缺陷,提供一种能够用在内燃机中的实用、廉价的控制系统以及符合污染控制要求且改善了发动机性能的燃油系统。本发明特别提供一种能够作为燃油系统的一部分使用的控制系统,该控制系统具有较好的污染控制并改善了发动机的性能,而只需要对现有的发动机设计进行极小的改动。
本发明的另一个主要目的是提供一种控制高压燃油泵及单个的三通喷射控制阀的电子控制系统及方法。
本发明的另一个主要目的是提供一种基于非车用发动机过程控制的改进的电子控制系统及方法。
本发明的另一个目的是提供一种高压燃油泵组件的电子控制系统及方法,该组件包括一个泵、一个储压器、一个与电操纵泵控制阀相结合的分配器和所使用的组件中的一个喷射阀。
本发明的另一个目的是提供一种控制高压燃油泵和喷射控制阀的电子控制系统及方法,它把发动机中的布线量降至最小。
本发明的再一个目的是提供一种控制高压燃油泵和喷射控制阀的电子控制系统和方法,它把对分配器和集成电路的需求减至最小。
另外,本发明的一个目的是提供一个控制喷射控制阀的一个驱动电路,它精确地测量电磁线圈的后EMF以确定阀的开启时间,与发动机的旋转同步预测及控制以后的开启时间。
本发明的另一个目的是提供一个控制喷射控制阀的电子控制系统和方法,它可以补偿阀和由阀控制的不同喷射器喷嘴之间的不同燃料管路长度和不同燃料传送时间。
本发明的另一个目的是提供一种控制单个燃料控制阀的电子控制系统和方法,该阀控制燃料向多个气缸中喷射,它依据将要喷油的每个气缸来改变定时信号传送的延迟时间来补偿到达气缸的燃料管路长度的不同。
本发明的另一个目的是提供一种采用电池电压,而不是升压电压来精确控制喷射控制阀的电子控制系统和方法。
本发明的另一个目的是提供一种电子喷射系统和方法,它在喷射过程所希望的时间之前将在电池电压下预先施加的偏流提供给喷射控制阀,然后在希望开启的时间以同样的电压增加开启电流,从而取消升压的电磁阀开启电压。
本发明的另一个目的是提供一种在发动机启动期间,发动机角度位置指示器的第一输出之前,在第一圈就让高压燃料储压器开始增压的控制系统和方法。
本发明的另一个目的是提供一种让高压燃料储压器开始增压的控制系统和方法,该储压器在发动机的开始转动期间产生泵控制信号的序列,直到发动机角度位置传感器产生一个精确的发动机角度位置指示,以使泵可以进行时间控制为止。
本发明的还有一个目的是提供一种监控与喷射过程相关的高压储压器中压力变化,根据压力的变化来检测泵的失灵或损坏的改进的控制系统和方法。
本发明的再一个特殊的目的是提供一种非车用发动机基于过程控制的改进的电子控制系统和方法,它提供了一个响应于有负载作用的输入指示的预测。
本发明的另一个特殊目的是提供一种基于发动机过程控制的改进的电子控制系统和方法,它在收到表示作用的负载量增加的信号时,立即增加发动机的功率。
本发明的另外一个目的是提供一种基于发动机过程控制的改进的电子控制系统和方法,它监测负载作用控制信号并且改变供油量,以在负载作用时增加发动机的功率,从而使发动机的功率随负载量的增加同步增加,而不响应于因不希望的负载作用而导致的发动机操作变化。
本发明还有一个目的是提供一种高性能、高压力燃料系统的控制系统,它不需要再对发动机进行很多昂贵的设计,而能够对现有的压燃式发动机进行改动。特别是本发明提供了一种具有上述特征的燃料系统共同工作的控制系统,即使燃料压力升到非常高的值时它也可以通过减少伴随的损失而改善发动机的效率。
本发明的另一个目的是提供一种内燃机的高集成燃料控制系统,它把对现有的发动机设计的影响减到最小,而仍然能够提供对喷射量及喷射定时的精确控制、丰富的失效保护电子元件,并且在与现有技术的系统相比降低了整个成本的情况下改善了发动机的效率。
本发明再一个目的是提供一种燃油泵组件的控制系统,该系统提供了一个带有一系列泵腔的泵壳和多个电磁操纵的泵控制阀,该阀与泵腔的数量相对应,用以控制在每一个泵腔中工作的相应泵塞的有效工作容量。通过这种结构,在燃油泵储压器中的燃油的相应压力信号可以被控制系统用来控制电磁操纵泵控制阀进行泵塞的有效工作容量的调整,以使储压器中的燃油压力与预定的压力值相等。
本发明的另一个目的是提供一种压燃式发动机的电子控制系统,它能够产生非常高的喷射压力,例如5,000-30,000psi并且最好是16,000-22,000psi,它相对于发动机工况的改变精确地控制燃料量时间。
本发明还有一个目的是提供一种燃油泵组件的电子控制系统,其特征是泵、分配器和储压器结合为一体。
本发明的另一个目的是提供一种控制带有泵送储压器的一对泵控制阀的数值电子供油控制系统,从而控制泵元件的工作容量以使之分担负载并且保持所希望的燃油压力。一个第一喷射控制阀用来控制向每一个气缸中预先喷射的部分,而一个第二喷射控制阀与第一控制阀一起来控制向每个气缸的主燃料喷射部分。如果控制阀(泵或者喷射器)之一无法工作,那么电子控制系统也可以让一个备用阀来代替。
本发明的另一个目的是提供一种新的燃料系统的电子控制系统,它具有一个三通阀,当它被激励时把燃油分配器中的轴向通路与高压燃料储压器相连,而当将其断电时则把分配器转子中的轴向供油通路与低压排出口相连。
本发明还有一个目的是提供一种具在比率成型能力的电子数值控制系统,它通过控制喷射组件处的压力增加,来控制喷射过程的初期部分期间的燃料喷射量。
本领域的技术人员通过参照附图结合对本发明的详细描述将能够理解到本发明的其它目的。
本发明的目的是通过提供一个电子数值控制系统,与发动机的燃油系统结合,监视并控制发动机和燃油系统的工作,从而在一个最佳实施例中实现的。该控制系统通过数值和模拟元件的结合而完成,而且包括一个用来计算燃料时间及燃料量的微处理器。开始向一组气缸中喷射的信号通过一根信号线传递到单个喷射电磁阀的驱动电路。控制系统也可相应于燃料系统实现其它的功能,例如控制燃油增压泵。
最佳实施例还提供了在每次喷射过程中通过减少喷射过程的初级期间燃料喷射量来降低柴油燃烧过程中产生污染程度的可变率的燃料输送。喷射器电磁阀和/或泵控制阀上还设置有一个后EMF传感器用来精确确定开启时间的延迟并且自动补偿超过这些延迟时间的变化。另外,还特别为每一个气缸在输出信号脉冲传送到喷射电磁驱动电路中与相应气缸的供油同步提供了可变编程延迟。这些延迟补偿了分配器与独立的气缸喷嘴之间的燃料管路长度变化,并使之可以使用上述不同的管路长度,而使燃料在希望的时间到达每个气缸。
启动时,该系统以预定的间隔及负载循环产生一个泵控制信号序列,在发动机初期转动期间驱动泵送控制电磁阀,直到发动机角度位置传感器产生一个精确的发动机角度位置指示,使得可以进行泵的精确时间控制为止。在高压储压器中的压力变化通过控制系统与喷射过程相结合而监测,而且,泵装置的失灵或者损坏由压力的变化来进行检测。
在本发明的另一实施例中,在喷射过程所希望的时间之前给喷射控制阀提供一个电池电压下的预先的偏置电流,然后在所希望的开启时间提供一个同样电压下的增加的开启电流,从而给控制信号提供一个精确的控制以及快速的线圈反应,因而不需要产生大的电磁阀开启电压的升压电路。
在本发明的实施例中,当发动机不用作车辆驱动力时,电子控制系统监测到负载作用控制信号,并且改变供油量以在负载作用时增加发动机功率,从而使发动机功率伴随负载的增加而同步增加,而不相应于非希望的负载作用而产生的功率消耗。
通过将多腔高压泵保持在所希望的高压储压器压力范围内,并且通过传递所有气缸的喷射信号经信号线圈控制输出进行传递来控制喷射阀,这两者的结合使本发明的控制系统产生了多个潜在的优点。
首先,该控制系统与上述新的发动机供油元件系统同步工作产生了很大的益处,如果只通过设置电子控制或者新的燃油系统元件设置中的任何一个,而缺乏另一个都不能完全实现这些益处。虽然其它供油系统的选择需要对发动机机体和/或气缸盖重新进行适应性设计,但是上面所述的电子控制发动机供油元件系统可以在不对发动机进行任何重新设计的情况下安装在任何柴油机或其它形式的内燃机上。而且,本发明的电子控制系统提供了改进的燃油经济性,同时降低了有害的污染。总之,没有电子控制系统产生供油系统所需的控制信号,并且同时通过执行精确控制算法降低污染及改善发动机性能、经济性和安全性就无法获得发动机供油元件系统设计的全部操作优点。
第二,通过将所有气缸的喷射控制信号进行组合,并且将这些控制信号提供给单个喷射器控制输出,从而使发动机腔室中的布线大大减少。特别是,系统只需要一个单根的短线从控制系统引到单个喷射器电磁阀,而不是需要六根或更多线,以便将每一根线引到不同的气缸盖上的喷嘴上。在希望将数值计算机控制功能同电磁阀的功率驱动电路上分开的情况下,单个喷射器电磁控制输出的措施使其可以依靠一个位于数值控制装置和动力驱动电路之间的简单的连接总线。这个总线可以使用简单的二进制控制信号并且可以用少到三至四根线就可以控制所有泵送和喷射功能的时刻。作为对比,现有技术的带有电子控制组件的控制总线则需要六根或更多的总线才能够控制单气缸喷射器电磁线圈,并且还要附加线来控制储压器压力。发动机元件中的线的数量和线的长度的减少降低了成本并且促进其保持线路具有极高可靠性。在象燃油喷射系统这样的基本系统中,减少系统中线的量就可以通过降低这些基本连接在发动机工作期间被热损伤、机械损伤以及发动机维修期间被损伤的可能性来增强其可靠性。减少线的数量同样也减少了所产生的电磁干扰和受到的电磁干扰,因而减少了对控制电路中的防护及对EMF的过滤的需求。由于所有的这些原因,本发明控制系统所实现的布线数量的减少是一个很大的优点。
第三,通过加入后EMF感应功能,与现有技术中带有多个电磁控制输出的电路相比,本发明的控制电路可以更容易、更有效地用来产生更精确的喷射定时和供油率。这些优点是由于本发明的电路只有一个喷射电磁阀输出,其中的电流必需被监控而获得的。在现有技术中,它即需要提供一组后EMF感应电路,还需要一个使单个的电路感应流经一组喷射器电磁阀的联系电路。而本发明的控制系统通过提供一个燃料泵电磁阀的组合控制并将所有的喷射器电磁信号传递成单个输出,进而给一个单个的喷射器电磁阀,从而取消了将后EMF传感器与电磁阀连接的多根线和开关装置。这样,该电子控制系统即减少了电磁场类型,也减少了与传感器操作相干扰的联系电路类型。另外,这种设计使得它有可能更容易地动态补偿由时间段的变化和开启指定喷射阀所需的电压的变化而产生的制造变化及损耗,使阀在所希望的精确时间开启。必需感应一个单个的阀,而且由于该阀始终被用于控制所有气缸的喷射,因而感应算法能够更迅速地检测发动机工作期间相应于时间的阀的变化。该系统可以储存和分析该信号,把其转换成描述阀相应于输出信号的数据,而不是试图去补偿一组不同的阀的不同变化。
第四,与带有多个电磁控制输出的现有技术电路相比,本发明的控制电路可以更容易、更有效地进行燃料喷射的比率成型。这个优异的结果是由于本发明的电路只有一个喷射器电磁阀控制而获得的。因此,需要对阀门特性和通过一组气缸的均匀特性进行精确预测的比率成型操作在必需起动只有一个阀门控制信号电路的时候才能够更为精确地实现。响应于不同的信号线路的变化和响应于一组电磁阀的变化由于本发动的结构而被取消。而本发明的控制系统通过提供一个燃料泵电磁阀的组合控制并将所有的喷射器电磁阀信号传递成单个输出,进而给一个单个的喷射器电磁阀,从而取消了将比率成型指令传送给电磁阀的多根线和开关装置。这样,该电子控制系统即减少了电磁场类型,也减少了与精确电磁脉冲操作相干扰的联系电路类型。另外,如上所述,这种设计使得它有可能更容易地动态补偿由时间段的变化和采用后EMF技术开启喷射阀所需的电压的变化而产生的制造变化及损耗。后EMF和比率成型技术的组合用在本发明中可以使燃油喷射到达一个更精确和更迅速的程度,这在多个阀门控制系统的现有技术中是很难实现的。特别是本系统能够储存和分析信号,将其转换成描述阀门响应于输出信号的数据,而不是试图去补偿一组不同的阀的不同变化,并且能够使用响应于单个阀门的这一信息来实现所希望的比率成型功能。
因而,这里所公开的电子控制系统可以对发动机的操作、燃油经济性、污染和产品的经济性进行极大的改善。
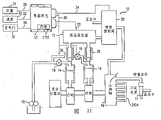
图1表示了本发明的燃油系统和控制系统的方框图;
图2a表示了本发明图1所示燃油系统的电控系统的方框图;
图2b至图2e表示了图2a所示电控系统的干涉和动力部分具体结构的电路图;
图3为图4至10中所讨论控制方法的分级关系方框图;
图4是本发明发动机转速控制方法(ESP)的流程图;
图5是本发明发动机转速控制方法的发动机位置处理部分的流程图;
图6是本发明发动机转速控制方法的速度处理部分的流程图;
图7是本发明供油命令转换算法(FCA)的流程图;
图8是本发明泵油命令转换算法(PCA)的流程图;
图9是本发明阀活动控制算法(VEC)的状态图;
图10是本发明的储压器压力传感取样(PSS)算法的流程图;
图11a是由本发明控制的比率成型装置的截面示意图;
图11b的图形表示了采用图11a所示装置的本发明所产生的燃油喷射压力波形;
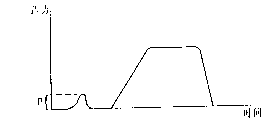
图12a的图形表示了采用图1所示压力喷射阀所产生的第二燃油喷射压力波形;
图12b的图形表示了由于采用现有技术中不同的电磁阀而使波形产生的变化;
图13的图形表示了同时采用图11所示的装置和图1所示的喷射阀时本发明所产生的喷射压力波形;
图14是本发明所采用的类型的起动电路示意框图;
图15表示了本发明所公开的后EMF技术测出的在阀运动期间的一个电流波形;
图16表示了本发明的后EMA检测回路的示意图;
图17为采用本发明的电磁阀和后EMF感应固路工作时的波形图;
图18为一种典型的电磁阀的B和H之间的关系曲线;
图19是一种可为本发明的电磁喷射阀提供三个不同电压的电路方框图;
图20表示对应于电磁阀运动的电磁压力时序的时序图;
图21为本发明一实施例的方框图,在该实施例中控制系统用于补偿分配器和各气缸间燃油管路不等长所造成的影响;
图22是本发明的燃油管路长度补偿算法的流程图;
图23比较了升压系统的时间对应的操作电流与本发明另一实施例的预压系统的时间所对应的操作电流;
图24a表示了在泵油和供油过程置换时通常储压器的压力变化,图24b表示了在工作期间与正常压力相比一种不正常的压力波形;
图25是本发明的一种用于检测泵是否工作正常的算法的流程图,采用该检测方法不需要复杂的波形过滤、分析和处理;
图26表示了一种脉冲波形,该脉冲波可在即使没有发动机位置参照值的情况下也能使储压器增压;和
图27是控制系统的方框图,该控制系统用于一个非车载发动机,如用于发电机。
图1表示了整体的燃油输送组和控制系统,以标号10表示,它是由本发明表示的方法控制的。所述的系统中包括:一个高压储压器12,用于接收高压燃油以将其送入发动机的燃油喷射器;一个高压泵14,该泵用于接收从一个低压燃油供给泵15供入的低压燃油,并将高压燃油供给储压器12,和;一个燃油分配器16,用于使燃油周期性地通入储压器12和各发动机气缸(图中未示)的喷嘴11。
所述的燃油输送组也包括一个或多个喷射控制阀20,这些控制阀位于从储压器12到分配器16的燃油供给管路上,用以根据从电控组件(ECM)13收到的控制信号控制喷入各气缸的燃油定时和定量。同样,在供油管路到泵14的位置上设置至少一个油泵控制阀18、19,用于控制供入储压器12的燃油量,从而保持储压器12内燃油压力。本发明还设有一个压力传感器22,以测量储压器12内的燃油压力。
本发明的燃油系统的部件可以采用一份在申请美国专利中所公开的结构(该美国专利申请的申请日为1993年5月6日,申请号为08/057,489,申请名称为“结构紧凑的高性能燃油系统”),而且它最好采用另一份在申请美国专利中所公开的结构(该美国专利申请的名称与上一份相同,申请日为1994年5月6日,并且是一份以美国专利局为受理局的PCT申请),本发明参考了这两份专利申请。本发明的喷射控制阀20最好采用下述两份美国专利申请中的一种中所公开的结构,即:申请日为1993年3月19日,申请号为08/034,841、申请名称为“力平衡的三通电磁阀”的美国专利申请,或申请日为1993年3月31日、申请号为08/041,424、申请名称为“套筒中带销的结构紧凑的三通阀”,本发明也参考了这两份专利申请。本发明的高压泵油机构14、18和19可采用下述美国专利申请中所公开的结构,该美国专利申请的申请日为1993年5月6日、申请号为08/057,510、申请名称为“用于燃油喷射系统的可变容量高压泵”,本申请还参考了这份专利申请。本发明的分配器16可采用下述美国专利申请中所公开的结构,该美国专利申请的申请日为1993年9月8日、申请号为08/117,697、申请名称为“用于高压燃油喷射系统的分配器”,本发明中同样参考了该专利申请。
ECM13根据不同的发动机工况对泵控制阀18、19和喷射控制阀20进行控制,以便准确控制分配器16送入喷嘴11中的燃油量,从而进一步有效地控制燃油的定时、输送和计量。ECM13通过喷射控制线24与喷射控制阀20相连接。喷射控制线24可按下文将要描述的方式使ECM13对喷射控制阀20的运行情况进行监视和控制。ECM13还与泵控制阀18、19和压力传感器22相连。ECM13可以用压力传感器22监视储压器12内的压力,还可以控制泵控制阀18和19的工作,从而保证储压器12的燃油压力在一个预定值。下面还将进一步描述本发明的上述功用。
图1中还表示了用来感应内燃机工况的ECM13的外部连接。ECM13通过输入线30、32和34与发动机外部监视装置相连。虽然图1中只表示了三根连接线,但是可选用任何数量的连接线将发动机的传感器与ECM13相连接。如图所示,输入线30与发动机位置传感器31相连,用以向ECM提供有关内燃机位置的信息。例如,位置传感器可设置在内燃机的凸轮上,且其形状可适于向ECM提供一个单脉冲信号。该信号可以表示发动机的气缸1位于上死点(TDC)位置处。用这种方法,发动机凸轮每转动一圈都可以准确确定内燃机的位置。当然,在本发明的发动机控制系统中也可以采用其它的应置传感装置,以实现本发明的目的。
输入线32与速度传感器33相连接,以向ECM13提供有关内燃机速度的信息。例如,速度传感器可以是一个霍尔效应型的传感器,它能在曲轴上的每一个齿通过该传感器时,产生并向ECM13传送一个脉冲信号。假设曲轴上有72个齿,那么发动机曲轴每转完一圈便向ECM13提供72个脉冲信号。测量这些脉冲信号间的时间间隔,ECM13即可很容易地准确确定内燃机的转速。当然,本发明也可选用其它类型的传感器。
输入线34与节气门位置传感器35相连接,它可以向ECM13提供有关发动机目前节气门位置的信息。节气门传感器35可选用任何一种类型的用以检测内燃机节气门位置的标准传感器。
利用从发动机位置传感器31和速度传感器33所得到的信息,ECM13可以方便、准确地确定在任何一个时刻内燃机的转动位置。具体来说,发动机凸轮每转动一周,发动机位置传感器31便可提供一个表示发动机预定位置的信号。如上所述,在收到该脉冲信号时,该传感器便向ECM13提供了一个表示发动机准确的转动位置的位置信号。此外,亦如上文所述,发动机速度传感器33在发动机曲轴正时齿轮的每一齿处产生脉冲信号,从而提供了一系列的脉冲信号。因此,如果曲轴正时齿轮的齿数已知,那么通过计脉冲的个数并将它与曲轴转动一周的总脉冲数量相比较,即可得知曲轴正时齿轮的转动量。
为便于说明,如果假设曲轴正时齿轮的72个齿,那么发动机曲轴每转动一圈ECM13便从速度传感器33接收到72个脉冲信号。此外,由于发动机凸轮轴每转一周(360°)则发动机曲轴转动二周(720°),所以发动机曲轴转动一圈将使ECM13从速度传感器33接收144个脉冲信号。当ECM13从位置传感器31接收到表示位置的脉冲信号后便开始计数收到的脉冲信号。假设ECM13从前次的最后一个脉冲信号(表示第一缸的上死点位置)起,从位置传感器31接收到了36个脉冲信号,那么,ECM13就可用数学方法计算出内燃机的位置。36除以144得0.25,这就表明发动机的气缸1已从上死点处转动了四分之一圈。同样地,由于凸轮转动一圈发动机曲轴转动两圈,所以这36个脉冲信号表示从收到位置传感器31前次的最后一个脉冲信号起,发动机曲轴也已转动了半圈。
如上所述,位置传感器31可与内燃机的曲轴相连接,并在一个预定位置提供一个准确表示发动机转动位置的脉冲信号。由于制造和使用上的误差,发动机曲轴还要对发动机的转动位置进行更准确的测量。但是囿于空间和尺寸上的限制,无法也无需在发动机曲轴上再设置一个附加的位置传感器。因此为克服上述缺陷,可使位置传感器31与发动机曲轴连接,以便在速度传感器产生一个脉冲信号(该脉冲信号表示发动机的一个已知的预定位置)前的某一时间产生一个脉冲信号。这样,当ECM13接收到位置传感器31发出的脉冲信号后,ECM13即可知道当发动机处于预定位置(如第一缸的上死点)时,就能从速度传感器33收到下一个脉冲信号。依此方法,控制系统便能根据发动机的曲轴进行准确的位置测量,而无需在曲轴或曲轴正时齿轮本身设置另外一个传感器。
本领域的技术人员可从以上的例子中理解到只需采用上述的发动机位置传感器31和速度传感器33即可准确测定内燃机的转动位置。另外,本领域的技术人员也能够理解到也可采用两个这样的传感器来确定发动机的位置的速度。
下面将详细描述ECM13如何利用压力传感器22来监视储压器12内的压力,如何控制泵控制阀18和19以保证储压器12内的燃油压力。首先参见图1,燃油通过泵控制阀18和19从低压供油泵15供入高压泵14中。
通常,泵控制阀18和19是处于打开状态的,这样在各泵14向下冲程时,燃油可以从低压供油泵15送出。在泵14的压缩冲程期间,泵控制阀18和19依然开启,则燃油便会被迫流回到低压供油泵15中,或流经一个出油管(图中未示)再流回到油箱中。但是,如果需要向储压器12中提供附加的压力燃油,那么在各高压泵14的压缩冲程期间,泵控制阀18和19将被关闭。随着泵控制阀18和19的关闭,高压泵14的腔室中将形成压力,直至该压力足以克服储压器12内的压力,从而打开各自的单向阀36。由于高压泵中存有加压的燃油,所以这些燃油便通过单向阀进入到高压储压器12中。
由于泵14产生了极高的压力,所以即使在ECM13上不再有控制信号时,泵控制阀18和19也是保持在关闭位置上的。这样在来自高压油泵14腔室的压力作用下,控制阀18和19便会保持在其关闭的位置上。在本发明的最佳实施例中,泵控制阀18和19无需采用昂贵的高压阀,而只要采用一个较便宜的电磁操纵阀即可使之保持在关闭位置上,因为不论ECM13的控制信号是否存在,高压泵14所产生的压力都可以使所述的阀保持关闭。本发明的另一个优点还在于ECM13可以计算泵油开始的时间,给出泵油的指令并继续执行其它任务。ECM13不必指示泵油的结束,因为当高压泵14的柱塞向下运动并从泵控制阀18和19释放压力时,泵油过程便会自动停止。
因此正如下面结合本发明所用的软件将要详细描述的那样,ECM13只需用来确定应在高压泵14压缩冲程中的哪一点上,相应的泵控制阀18或19应关闭。为简化这一确定过程,ECM13依靠压力传感器22来监视储压器12中的压力。当对压力传感器送来的信号进行分析后表明储压器12中需要添加附加的压力燃油时,ECM13便计算应在高压泵14压缩冲程的哪一点处将相应的泵控制阀18或19关闭。然后ECM13产生一个适当的定时信号,以保证适量的压力燃油加入到储压器12中。
如上所述,一俟ECM13关闭泵控制阀18或19,高压泵14中产生的压力便可使泵控制阀18或19保持关闭状态,直到泵油过程结束。当然ECM13也向泵控制阀18或19发出一个控制信号,该信号的长度应确保高压泵14中建立起的压力足以将泵控制阀18或19保持关闭。在本发明一个较次之的实施例中,ECM13产生一个固定时间长度的信号,并以该固定长度的信号来控制泵控制阀18或19。由于高压泵14与内燃机是机械联接的,所以泵14的速度随发动机的速度而变化。这就导致了泵14腔室内形成的压力随发动机的速度改变。因此,当内燃机低速运转时,为确保高压泵14内产生适当的压力,便于将泵控制阀18和19固定在关闭位置上,因而ECM13必需要用一个非必要长度的固定时间。然而在内燃机高速运转时,这一固定长度的时间信号就是不必要的了。
因此,在本发明的最佳实施例中,ECM13产生一个用于泵控制阀18和19的控制信号,该信号的长度与内燃机的转动位置有关。例如,一个大约相当于发动机曲轴转动40度所需的时间。在曲轴转动40度的时间(与发动机的转速无关)内,泵14也在泵腔内产生大致相同的压力。按照这一方法,ECM13可以为泵控制阀18和19产生一个控制信号,该信号的长度至少应能保证高压泵14产生适当的压力,以使泵控制阀18和19不受发动机速度的影响的保持关闭。
ECM13还在发动机起动期间以一种独特的方式操纵泵控制阀18和19,以便易于储压器12内的加压。下文将结合发动机位置传感器对上述操作过程进行详细说明。
图2a所示为本发明控制系统的方框图。从该图中可以看出,在本发明的最佳实施例中,所述的控制系统包括一个数字控制部分232和一个驱动部分234,这两个部分通过连接器200相连。数字控制部分232和驱动部分234应予分开,以避免这两个部分之间的电磁干扰(EMI)。然而如果能消除或减少EMI问题,从节省空间的角度考虑似应将上述两个部分合并在一个单一的、整体的单元里。
通过连接器200与驱动部分234相连的还有电池228的正极和负极,以及一个车辆开关显示器236。电池的两极向驱动部分234提供动力,且驱动部分234用这些端极来控制燃油系统的供油和泵油单元的操作。此外,开关显示器236用于指示车辆开关已打开,从而设置一个故障保证机构,以防止车辆开关处于关闭位置时供油或泵油回路的误操作。
数字部分232包括一个微处理器230,它可以是摩托罗拉(MOTOROLA)已投入商业生产的68331或68332。同样,数字部分232还包括相应的支持集成电路(图中未示),以便操作微处理器230。此外如果操作微处理器230需要,数字部分232可以包括附加的存储器或数字电路。
一般来说,在本发明中通过连接器200将数字部分232和驱动部分234连接在一起是非常简单的。这是由于燃油系统的设计和单个喷射电磁阀的使用而造成的。在本发明最佳实施例中,数字部分232向驱动部分234提供一个泵指令、泵选择和一个喷射指令信号。泵选择信号直接用于关闭与被选定的泵14相应的泵控制电磁阀18或19,以开始泵油过程。喷射指令信号直接用于驱动电路,以打开喷射控制阀20,这样燃油便从高压储压器供入分配器16所选定的发动机气缸中。
从上述说明中可以看出,在本发明的控制系统中,数字部分和驱动部分的连接非常简单。由于需要(或是必须)而将上述两部分分开以避免它们之间的电磁干扰,本发明中所需的连接数量的减少将会大大降低本发明控制系统的成本和复杂程度。
如图2a所示,驱动部分234包括:喷射电磁阀驱动回路238,高压升压回路240,开关处理回路242和泵电磁阀驱动回路244。通常,电池的端极加在高压升压回路240和开关处理回路242上。高压升压产生回路240利用电池的电压来产生一个高压输出246,该输出信号送至喷射电磁阀驱动回路238和泵电磁阀回路(如有必要的话)。由于在本发明中只有一个喷射电磁阀,它就不必采用多个升压回路或用于向多个喷射电磁阀提供升压的复杂的高能量开关结构,这就大大降低了本发明系统的成本和复杂程度。开关处理回路242利用电池的电压,产生一个施加在门电压输出端248上的门电压,所述的门电压输出端则用来驱动喷射电磁阀驱动回路238中的电路和泵电磁阀驱动回路244。采用这种方法,只有在开关处理回路242根据一个有效的开关指示236在门电压输出端248上产生适当的门电压时,喷射电磁阀驱动回路238和泵电磁阀驱动回路244才会工作。因此,开关处理回路242被作为防止控制系统误操作的故障保证机构。
喷射电磁阀驱动回路238通过一个喷射命令指令线与微处理器230相连。泵电磁阀驱动回路244通过泵选择信号线和泵指令信号线与微处理器230相连。上述三条连线提供用于控制喷射电磁阀驱动回路238和泵电磁阀驱动回路244的工作。
喷射电磁阀驱动回路238包括:喷射电磁阀控制器202,高压侧驱动回路204,电流感应回路206和低压侧驱动回路208。喷射电磁阀控制器202通过连接器200与喷射指令信号线相连以接收喷射指令,与升压驱动回路205相连以控制送至喷射电磁阀20的高压控制信号的应用,与电流感应回路相连以接收一个供给喷射电磁阀20的电流值的指示信号,并与低压侧驱动回路208相连以接收一个喷射指令。高压侧驱动回路204和低压侧驱动回路208与喷射电磁阀20和电流感应回路206相连,从而感应电磁阀的电流。
高压升压产生回路240包括一个高压产生回路212和升压输出回路246,高压产生回路212通过连接器200接收来自电池228的电池电压,并产生一个施加在升压输出端246上的高压升压信号。通常该升压在100V-250V直流电的范围内,最好在150V-200V直流电的范围内。由高压升压产生回路240产生的高压施加到喷射电磁阀驱动回路238上,用于操纵喷射电磁阀。
泵电磁阀驱动回路244包括泵电磁阀控制器216,高压侧驱动回路218,电流感应回路220和低压侧驱动回路222。泵电磁阀控制器216通过连接器200与泵指令信号线相连,以接收泵指令信号;它还与高压侧驱动回路218相连,以控制送至泵控制阀18/19的电压控制信号;它再与电流感应回路220相连,以接收表示当时供应到泵电磁控制阀18/19上的电流信号;最后它还与低压侧驱动回路222相连,以接收一个泵指令。高压侧驱动回路218和低压侧驱动回路222与泵电磁控制阀18/19和电流感应回路200相连,以便感应电磁阀的电流。
现参照图2b-2e进行说明,这些图中表示了可用于本发明控制电路的一个回路的电路示意图。具体来说就是:图2b说明了一个可用于实现喷射电磁阀驱动回路238的回路;图2c说明了一个可用于实现高压升压产生回路240的回路,图2d说明了一个可用于实现开关处理回路242的回路;图2e说明了一个可用于实现泵电磁阀驱动回路244的回路。为清楚起见,图2b-2e采用了图2a中所使用的标号。
首先参见图2b所示的喷射电磁阀驱动回路238。喷射电磁阀238用来提供操作喷射控制阀20所必须的电信号。这些电控制信号包括;一个高压升压信号,一个大电流电磁阀引入信号和一个小电流电磁阀保持信号。通常,高压升压信号由150-200V的脉冲信号构成,该脉冲信号持续时间约为100微秒(只用于上升边)。应用该升压信号后,施加约500微秒的大电流牵入信号。最后,在喷射期间施加通常由12V电池电压产生的低压保持信号,以便将喷射电池控制阀20保持在其开启位置上。如图2b所示,喷射电磁阀控制器202包括一个集成电路电磁阀控制器。该集成电路控制器是应用特性集成电路(ASIC),该电路的程序用来实现上述驱动信号的产生和使用。此外,控制器202包括一个电流传感器,该传感器用来监视通过喷射电磁阀的电流,并向喷射电池提供一个脉冲宽度调节的激励信号,从而将电流保持在预定的宽度范围内,如在引入电压状态时该电流为18-22A,而在保持状态时该电流则为9-11A。本领域的技术人员从该图中即可了解,图2b的其余部分包括高压侧驱动回路204、电流感应回路206和低压侧驱动回路208。
参见图2c,图中表示了连接器200和升压输出端246。图2c的其余部分构成本领域技术人员易于理解的高压产生回路212。类似地,如图2d所示,图中表示了连接器200和门电压输出端248,而其中的其余部分则构成了一个本领域技术人员易于理解的开关处理回路220。在图2e中,泵控制器216也包括一个与如上所述的操作类似的、对应喷射电磁阀驱动器的ASIC,它具有电流感应功用和脉冲宽度调节,以便将电磁阀电流保持在预定的预定范围内。然而泵控制阀的操作也可以不需要升压驱动电路。
下面将详细描述ECM13和相应的数字部分232所使用的软件,该软件用来实现发动机的控制功能。很有必要了解到,ECM13包括一个如68331或68332的微处理器,该微处理器可以从摩托罗拉公司买到。所述的微处理器可用作能实现内燃机、或车辆、或安装该内燃机的装置的操作有关功能的计算机。例如,微处理器除了控制发动机的供油外,它还可以进行车辆诊断测试和/或向驱动器或其它远处的输送有关车辆性能的进一步信息。
然而,为了适时地进行发动机的供油,内燃机的供油需要准确的操作定时。因此,为了进行多种操作,本发明的微处理器的其它操作可以被迫中断,以进行供油操作。当每次被迫中断发生时(它发生在每次从位置传感器31接收到位置脉冲信号和从速度传感器收到速度脉冲信号时),ECM13便进行一系列的数字计算,用实现发动机的供油和储压器的升压。由于微处理器的被迫中断,所以车辆所需的微处理器或其它控制器的数量可以减少,而仍能对发动机供油进行准确控制。
此外,虽然在上文中讨论的是使用68331微处理器,且在所附的软件中指定的是在68331微处理器上的操作,但将本发明投入商业使用时,最好采用如68332等类似的微处理器。因为与68331处理器相比,68332支持更先进的定时操作。特别是,在68332处理器中包括一个时间处理单元(或称TPU),而68331处理器只包括一个用于一般目的的计时器(或称GPT)。由于燃油喷射和泵油过程的控制需要非常准确的定时控制,具有TPU更好一些,所以说使用68332处理器更好。对本领域的技术人员来说,完全可以将本文中对68331的说明和软件中的本发明的原理应用到68332或其它处理器上。
在本文所述的燃油控制系统和所附的软件中,采用了带有一个GPT的68331处理器。68331处理器的GPT只用于在一个预定的速度下计数定时脉冲数量。例如,GPT可按程序计数每10毫秒的脉冲数量。依此法,GPT即可通过计算在GPT上两次之间的差来确定两次之间的时间,也可利用68331处理器的比较操作输出,在一个预定的时间开始新的一次,它与现有技术中的方法相似。
下面将讨论本发明的控制系统所用的软件。图3说明了本发明所采用的控制方法的分级关系。如上所述,本发明的控制系统主要是被迫中断的。主要中断路径发动机速度处理(ESF)路径300。该路径处理所有由发动机的速度传感器33和位置传感器31产生的中断信号。所附软件的部分A中给出了一套ESP算法的源代码。同样在附件的部分I中也给出了所附软件中各种算法所用的不同定义。
ESP执行的算法中含有三个子路径(或称子算法)。其中储压器压力传感器取样(PSS)算法302进行各种用于控制储压器12内燃油压力的、与发动机速度同步的计算。PSS算法与ESP算法结合在一起形成所附软件中部分A的ESP算法。储压器压力设定值(PSE)算法304和储压器压力控制(PCR)算法306为该压力处理过程期间PSS算法302所采用。PSP和PCR算法的源代码分别在所附的软件的部分B和C中表示。
位置处理算法308通常作为ESP路径300(所附软件部分A)的一部分来完成。位置处理算法308的作用在于对位置传感器31产生的中断进行专门处理。
速度处理算法310在该例中也作为ESF路径300的一部分(所附软件部分A)。速度处理算法310为速度传感器33产生的中断信号提供支持。每当速度传感器33产生中断信号(可以是10-50度发动机曲轴转角)时,速度处理算法便进行计算,因此,速度处理算法也用作为供油和泵油进一步控制的一个切入点。
发动机燃油系统的控制由燃油指令转换(PCA)算法312进行。该算法可确定是否需要供油,并进而确定是否开始且持续该供油过程。FCA算法312采用供油到持续转换(FON)算法314来计算供油的持续时间。阀控制(VEC)算法316向发动机控制系统所用的燃油阀提供具体的控制信号。FCA、FON和供油VEC算法的源代码分别在所附软件的部分D、E和F中表示。
储压器燃油供给泵油系统的控制由泵油指令转换(PCA)算法318完成。PCA算法计算泵14适当的关闭角度,并将该角度转换转换为一个适当的时标基准,以供阀控制(VEC)算法320处理。VEC算法320对泵控制阀18和19进行控制,以便高压泵14将燃油供入储压器12中。用于供油阀控制的VEC算法316和用于泵油阀控制的算法320基本相似。但是,由于这些算法可以同时工作,所以它们也可以作为两个独立的软件程序来实施。同样地,PCA和VEC的泵油算法的源代码分别在所附的软件的部分G和H中表示。
现在详细说明上述各算法。当接到一个插入信号时,燃油系统控制器便执行一系列的计算机软件程序,对燃油系统进行监视和控制。下面将参照相应的、表示该程序流程的附图详细讨论上述的各种程序。此外,正如上文所述,由这些流程图表示的软件的源代码在所附的缩微胶片中表示。
图4是本发明所用的发动机速度处理算法(ESE)的流程图。该程序从图4中的框400开始,在这一步程序确定正在处理的中断信号源。如上所述,当接到来自发动机感应系统(即速度或位置传感器)的中断信号时,图3中所示的ESE算法便开始工作。参见图1及相应的说明部分,中断信号既可以由位置传感器31产生,也可以由速度传感器33产生。因此、图4中的框400首先确定是否正在处理由发动机位置传感器31或发动机速度传感器33所产生的中断信号。如果中断信号是由发动机位置传感器31产生的,那么处理过程便途径402到方框404,在方框404运行位置处理算法。方框404中所示的位置处理算法在图5中详细示出,后面将结合该图再进行讨论。
位置处理结束后,程序运行到方框406。在方框406中,发动机速度处理算法检查发动机速度传感器(ESS)诊断程序是否已运行。假如该系统发现发动机速度传感器有一个错误或失误,那么将运行ESS。该诊断程序包括特殊的处理路径,以修改或补偿传感器的错误,或只是简单地指示错误的产生,以便维护人员在对程序进行检查时注意到这个错误。如果一个错误连续发生,那么在对该传感器进行维修以前,ECM13可以一直对这一错误进行修正。
如果ESS诊断程序运行,表明速度传感器处于不正常的状态,那么速度处理算法将进行到方框408。这样,如果发动机转速传感器失灵的话,那么发动机就将在一个排量被减小的状态(或称“LIMPHOME”状态)下工作。这就导致了形成一个发动机速度的近似值,该值可用在需要从发动机速度传感器收到准确数据的地方。然后该发动机近似值被用以供油和泵油的控制。关于速度处理算法具体操作将结合图6在后面进一步说明。如果ESS诊断程序没有工作或在速度处理算法操作完成以后,则程序将回到方框410。
方框410表示了一个可用于本发明的选择控制算法,但对该燃油控制系统的正常运行来说,该算法并不是必须的。在方框410处,该燃油系统决定除了处理发动机位置传感器的数据外,是否需要处理发动机速度传感器的数据。如果根据需要,要在程序的这一位置处处理发动机速度传感器数据,以避免数据处理过程中不必要的延时。该延时是由于程序等待速度传感器中断信号的需要而造成的。如果程序处于非检测状态,即无需对发动机速度传感器的信号进行处理,那么程序将进入方框412,并结束发动机速度处理算法。然而,如果程序处于ESS状态,即对发动机速度传感器数据进行处理,那么程序转入方框420,且速度处理程序将依下述方式进行。
现回到图4的方框400,如果决定有来自速度传感器33(见图1)插入信号,那么处理过程经路径401到达方框414,在该方框处执行一个压力控制算法。后面将结合图10对方框414所示的压力控制算法进行说明。在压力控制算法完成以后,程序将继续进入方框416,该方框确定通用定时器的当前值与最后一次速度处理中断信号时的值的差值。如上所述,在GPT中的该差值可用来确定燃油控制系统中两次之间的时间。在GPT中的差值(或称差值)表示两次速度传感器插入信号之间的时间,即用接收到的脉冲数乘以GPT脉冲之间的时间表示从上一次速度插入信号产生后经过的时间。已知上一次脉冲后所经过的时间和两次速度传感器中断信号之间的曲轴转角后,更易于计算出准确的发动机速度。
方框416中计算出的值,GPT中两次速度传感器插入信号间的差值,也可有选择地到达方框418中所示的发动机速度算法(ESA)中。ESP在基本状态下工作(即它不需要与内燃机同步,但却是连续工作的),且ESP将发动机速度的信息提供给内燃机控制系统中的其它算法和其它的车辆系统。下面描述对原始速度数据的具体处理,该处理是由用于燃油控制系统的速度处理算法进行的。
该处理过程继续进入到方框420执行速度处理算法。速度处理算法将在下面结合图6及其相应的说明加以解释。
在完成发动机速度处理算法以后,该控制系统检查在方框422中的是否有任何TDC诊断程序已被执行。如果TDC诊断程序已执行,则说明内燃机位置传感器发生误差。如下将结合发动机处理位置算法进行的说明,若速度传感器的插入数超过一个预定值,那么,便可查出位置传感器已失灵且TDC诊断系统已运行。如果TDC诊断系统已运行,则处理过程进入方框424,并检查位置信号的实用性。依此法,即使在位置传感器失灵的情况下,控制系统也可继续运行,这就使发动机在位置传感器进行维修以前维持运转。但是如果发动机熄火的话,那么它就无法再起动,因为在控制系统中缺少位置信号,因此也就无法向发动机气缸正确地供油。然而,在本发明的最佳实施例中,位置信号也可改变为速度传感器信号,从而使得发动机再次起动。但即使在这种情况下,发动机也是在一个修正态下工作的,因为仅凭曲轴速度传感器是无法得知准确的发动机位置。
下一步,在方框426运行位置处理算法。如上所述,位置算法在图5中表示,并将结合该图在下面进行描述。如果在方框422没有运行TDC诊断程序或方框426中的位置处理算法完成以后,处理过程将进入方框428。
在方框428中,对TDC状态进行,如果检查出是处于TDC状态,那么处理过程转入方框404,进行正常的位置处理。如果在方框428中检查出不是处于TDC状态,那么处理过程转入方框412,结束所述的算法。
方框428与方框410的目的相同,且方框410表示一个可有选择的用于本发明的控制算法,但它却不是保持该燃油控制系统的正常工作所必须的。在方框428中燃油系统确定除了对发动机速度传感器的数据进行处理外是否还要对发动机位置传感器的数据进行处理。如方框428所示,该步骤可以根据需要在程序的这个位置对发动机速度传感器的数据进行处理,以避免在处理数据过程中不必要的延时,该延时是由于需要等待位置传感器的插入信号而造成的。如果没有运行TDC程序,表明不需要处理发动机位置传感信息,则控制程序进入方框412,且发动机速度处理算法结束。但如果是处于TDC状态,表明需要处理发动机位置传感器的数据,则控制程序转入方框404,并如上所述,按正常情况进行速度处理。
在图4的方框404和405中所示的位置处理算法将参照图5进行详细说明,图5对该算法进行了更加具体的说明。位置处理算法的基本目的是控制系统软件的运行与内燃机的转动位置同步。所述的位置处理算法只是在已从位置传感器31(如图1所示)检测到一个TDC基准信号时才运行。如上所述,该TDC基准信号是直接的或间接的,所谓直接的即指来自位置传感器的表示处于TDC状态的信息,所谓间接的则是指来自位置传感器的表示下一个速度传感器脉冲表示TDC状态的信息。
处理过程从方框500开始,在该步骤中程序确定控制系统是否在前面已经建立了一个位置基准信号。在这个确定过程中可以确定是否已收到一个来自位置传感器31的起始脉冲,或从传感器中收到了所述的这第一个脉冲信号。在发动机的起动过程中这是关键。如果没有确定这是从位置传感器接收到的第一个脉冲,则方框504中的计数检查将失灵,并导致运行方框506中的错误位置(或TDC)诊断程序。
如果已经建立了一个位置参考信号,则程序将进入方框504,在此处可证实计数状态。在方框504,控制系统将对从速度传感器33接收到的脉冲数和一个预定的正确值或表示脉冲数的确定值进行比较,表示脉冲数的确定值应当是发动机曲轴每转动一圈所收到的脉冲数。通常该修正值或确定值等于用于通过速度传感器33感应发动机速度的正时齿轮的齿数。在操作过程中,曲轴每转动720度,或凸轮每转动360度图5所示的算法运行一次,因为在这一时刻通常可以收到一个来自位置传感器31的位置指示脉冲。在这一转动期间,位置计数器收到的脉冲数等于曲轴齿轮上的齿数。因此,在方框504所进行的比较可以通过速度传感器33来证实在转动期间没有产生计数误差,因为已从位置传感器31收到了位置脉冲信号。
如果发现位置计数状态是正确的,则处理流程进入方框508,在该处清除系统诊断标记,说明系统运行正常。但是,如果发现计数状态有误,那么程序就转入方框506,开始运行位置(或TDC)诊断程序。在方框506开始TDC诊断或在方框508清除诊断信号以后,处理过程转入方框510。在方框510中,位置计数器清除或清零,以便在发动机曲轴转动下一圈时重新开始计数脉冲数。
程序在方框512继续运行,且脉冲累加器(PAI)清零到FE十六进位。脉冲累加器的目的是为了便于速度传感器脉冲的计数。脉冲累加器每从发动机速度传感器收到2或3个脉冲后计数一次。该过程是由每次从发动机速度传感器传来的脉冲在累加器中的增加和当脉冲累加器中累加的脉冲溢出时提供的中断信号所完成的。在发动机曲轴的正时齿轮的每一个齿通过速度传感器时,发动机速度传感器便产生上一个脉冲。通常这导致了每10度发动机曲轴转动角产生一个脉冲信号。然而,本发明只需要每30度发动机曲轴转动角来处理一个中断信号。脉冲累加器通过设置一个装置辅助上述任务的完成,利用该装置控制系统每次从速度传感器接收3个脉冲信号计数一次。
脉冲累加器也用于保持控制系统与发动机的转动同步。当有一个位置脉冲指示时,脉冲累加器清零至FE十六进位。这样,在收到第2个速度传感器脉冲信号时,位置感应回路将分析所产生的插入信号,从而表示一个强制的发动机位置信号,如第1缸的TDC程序。然后,该系统将脉冲累加器清零,以便继续每次从速度传感器收到3个脉冲信号便进行的计数。
随后程序进入方框514,在该步进行位置处理算法,然后根据对位置处理算法的响应,程序返回方框404或方框426。
再返回图5中的方框500,如果没有建立位置基准信号,则程序转入方框502。这种情况发生在前次没有从位置传感器32收到一个初始的位置指示脉冲的时候。例如在发动机起动状态下,发动机的转动位置是未知的,且要经过一段时间才能从位置传感器收到第一个位置脉冲信号。如果正在处理的位置脉冲是收到的起始脉冲,那么程序就将建立一个基准值,并从已经建立了一个基准值的方框502继续该程序。随后程序转入方框508,并如上所述,沿方框510、512和514继续运行。
现参见图6对图4所示的方框420和408中的速度处理算法进行详细说明。速度处理算法从方框600开始,在方框600中确定是否已建立了一个位置基准信号。如果没有建立位置基准信号,则程序转入方框602,该框中运行的是一个可选择的固定泵油算法。反之,如果在方框602中没有采用可选择的固定泵油算法,则速度处理算法便在方框604处结束。
由于尚未建立一个位置基准信号,所以还无法进行供油。没有位置基准信号控制系统不能确定发动机准确的转动位置。因此,控制系统缺少足够的信息来确定哪一个气缸需要供油,或这一供油应何时进行。这种缺少位置基准信号的情况只是发生在发动机起动过程中,特别是发生在发动机的凸轮还没转完一圈时的曲轴转角期间。当发动机凸轮转完一圈以后,便可从位置传感器31收到一个位置脉冲信号,并且也如上所述建立了一个位置基准信号。由于在发动机起动过程中没有收到位置脉冲信号,所以可以运行可选择的固定泵油算法,以利于发动机的正常起动。
在下述两份美国专利申请中讨论了适用于本发明控制系统的燃油系统的结构和其操作,这两份申请是:申请号为08/057489、名称为“带储压器的紧凑型高性能燃油系统”的专利申请和与之名称相同的、于1994年5月6日提交的作为其连续申请的专利申请。从上述申请中可以看出,储压器中的燃油需要有很高的压力(大约在16000PSI到22000PSI之间),以实现正常的燃油喷射。然而,出于安全及其它的原因,在发动机不工作期间储压器内的压力没有这么高。因此,当发动机起动的时候,储压器12应迅速增压,以便在收到一个位置传感信号后可以尽快地开始燃油喷射。
方框602中所示的固定泵油算法即可实现这一目的。如上所述,当ECM13将泵油控制阀18或19关闭时,来自高压泵14中的油压将阀18和19保持在关闭位置,直到相应的压力泵14开始向下运动。然而,由于此时没有收到发动机位置信号,所以无法准确确定何时关闭阀18或19,以开始泵油过程。此外,也不能仅将阀18或19置于关闭位置,因为这样的话泵14就无法从低压泵15中吸入燃油。
所以在本发明中,当发动机起动时,ECM13产生一系列用以控制阀18和19的脉冲信号。这些脉冲信号的保持时间约为20度曲轴转角,频宽比约为50%。图26给出了一种这样的波形。如图26所示,泵控制操作信号2600基本为方波,脉冲保持(ON)的时间约为20度发动机曲轴转角,脉冲消失(OFF)的时间约为20度发动机曲轴转角。如果在泵14向下的行程中产生了一个这样的脉冲,那么从低压泵15流向高压泵14的燃油流就会立即被切断,但只要一收到来自ECM13端子的脉冲信号,此燃油流又可从新开始流动。但是,如果这个脉冲是在高压泵的压缩冲程中产生的,那么相应的泵14中产生的燃油压力则将泵控制阀18或19保持在关闭位置,且将高压燃油加入到储压器12中。
参见图6,如果在框600中已经建立了位置基准,那么就会在框606中继续执行。在框606中,刚好在电流中断之前控制系统产生一个特殊的发动机间隔速度值。该速度值通过分析68331微处理器中的一般意义上的计时器和框416中算得的多个计时器的差来确定。框606中的算法确定了微处理器的一般意义上的计时器当前的读数与前一次的中断期间一般意义上的计时器的读数的差。这一计算的结果是在前一次的间隔期间产生一组计时脉冲。这个时间段(即在最后间隔期间由一般意义上的计时器计数的计时脉冲数所代表的时间段)被储存起来以使之能够用于后面的燃油系统计时计算。
然后进行框608中的算法,并且增加一个位置计数器。由于速度传感器33已产生了一个脉冲,表明曲轴正时齿轮的另一个齿或者间隔已经通过,位置计数器需要增加一个计数,以确保计算出精确的发动机转动位置。
在框610中继续进行算法,它通过检查确定出内燃机的起动是否正在发生。如果发动机正在起动(即,使用者正试图起动内燃机),控制进到框612,继而到框614前在框618返回。然而,如果发动机的起动状态未在框610中表明,控制通过框616并到达框618。如图6中可以看到的那样,在框610和框618之间的转换中将执行两条路径中的一条。算法或是执行框612和框614,或是执行框616。决定执行哪一条路径取决于发动机是否处于起动状态,这将在下面更进一步描述。
在工作中,本发明的控制系统在每一个中断期间工作,确定在下一个中断之前的任何时刻是否需要供油过程或泵送过程。在执行每个算法期间,程序在发动机的下面的30°曲轴转角中检查是否需要供油或泵送过程。另外,由于控制算法过程中的延迟,需要确保泵送或供油过程不会发生在发动机曲轴下面的30°转角加上一个附加的余量,以补偿控制算法在完成下一个中断间隔期间的适当过程中所需的延迟。
在框616中、控制算法期间,时间段的预期调整必须检查将要发生的供油或泵送过程是否确定。在本发明的最佳实施例中,这个时间段通过分析前一个中断间隔并以该时间长度做为基准线预定后来的中断间隔来确定。另外,如上所述,规定有预定的偏差以允许控制算法的计算延迟。一旦该后续的中断间隔的预定值被确定,程序便进入到框618。
然而,如果发动机处于起动状态,如框610确定的那样,来自前一个中断间隔的位置传感器数据就会不精确,并且它也许直到下一个中断间隔也不能反映精确时刻。在这种环境下,框612中的控制算法依赖于更普遍的发动机速度算法或者ESA值。在发动机起动过程中不希望使用框612中的ESA速度基准,因为发动机曲轴的扭震和快速振动速度被改变了。由于它是一个速度的平均值,虽然该值并不象框606中所确定的那样精确,但是在发动机起动期间,该值改善了起动特性。然后后控制到达框614,在此EFA速度值被转化成表示发动机曲轴旋转30°和1°的计时器等同数字。这种转化使得EFA速度在同样的装置中作为框616中确定的速度值,从而使控制过程沿独立于通常到达框618的路径到达该框。
在框681中继续的算法是FCA算法。该FCA算法将参照图7在下面详细描述。接着控制转到了框620,在此执行PCA算法,该算法也会参照图8在下面进行详细描述。最后控制转到框604,速度处理算法结束。
下面参照图7,FCA算法在图3的框312中被简明示出,下面将更详细地进行讨论,图7中所示的供油控制算法是用来确定在当前的中断间隔期间是否发生供油过程。如果确定发生该供油过程,FCA算法确定出一个喷射时刻值的开始以及喷射时刻值的延续时间。FCA算法再把这些值转换成计时器值,其足以控制图1中所示的喷射控制阀20,并且开始供油过程。
供油控制算法开始于框700,对于在该框中将各发动机气缸喷射开始值的绝对曲轴转角转换为各发动机气缸基于TDC的喷射开始相对值。该算法接近每个气缸的上死点已被储存在内存中的绝对值。每一个预定的气缸上死点值加上定时角和气缸特定的较准值,减去阀和管路的延迟,得出的结果表示发动机的至少下面两个气缸(也可以是所有气缸)进行供油的时间。
表示供油过程适当开始的这六个发动机位置将由发动机曲轴旋转的角度表示,即从0°到719°。下面各种喷射角的相应开始的计算将进入框702。在框702中算出喷射延迟时间的开始,即直到发生下一个燃料喷射过程的时刻(以GPT计算)。通过从每一个算出的供油过程的发动机位置(发动机曲轴转角)减去当前的发动机位置而产生。该计算结果表示所述的气缸将开始进行喷射的发动机角度,该角度值然后乘以每曲轴转角所收到的计时器值以产生一系列GPT计时值,直到每个喷油过程的开始。这是估计的时间(GPT计时值)。
下面执行框704,算法在此确定出当前间隔期间是否发行供油过程,直到框702中算得的喷射开始的计时器值如果小于本中断间隔(如框616中表示的那样)完成前的计时器计数值,那么在当前间隔期间将会发生供油过程。如上所述,速度中断主要发生在大约曲轴旋转每30°产生的速度传感器33信号。因此,如果供油过程确定成需要在发动机曲轴旋转的下一个30°转角之前发生,那么需要执行发动机供油过程。如从图7中可以看到的那样,如果发动机供油过程被确定为需要,则执行框706。然而在该期间,如果确定为不需要发动机的供油过程,则转到框712,供油控制算法中断。
接下来在框706中执行供油的接通持续时间(FON)转换算法。执行FON算法是用来确定图1中所示的电磁喷射阀20应该在供油过程中保持开启所需的时间值。这个时间是储压器压力和所期望的供油量的因素,因此作为输入,FON算法接收该供油量,并且测量上述储压器的压力,该压力是由图1中所示的传感器22通过ECM13测得的。该算法使用供油量和储存的压力形成一个包括电磁阀喷射持续时间值的三维查值表。
在本发明的最佳实施例中,FON算法接收预期的供油量和测出的储压器压力。预期的供油量以可能的最大供油量的百分比表示,而测出的储压器压力则以最大可能的储压器压力百分比表示。三维查值表产生一个供油时间或者供油定时,这就是最大可能的时间百分比。该最大可能的时间百分比被转换成GPT计时器时刻。另外,在本发明的最佳实施例中,三维查值表由20×20储压器压力和供油量值的矩阵构成。当然,如果期望更加清晰,该表的大小可以很容易地进行扩张并且在可以提供增加的期间值。
而后进入框708,其中记时器值将被用于产生一个控制电磁喷射阀20的记时值。在框708中,将算出喷射开始和喷射结束时未进行GPT运算的实际值,这些值通过下面将要讨论的VEC算法将被用来控制电磁喷射阀20的驱动。将算出的时间值与最小的时间值进行比较,如算出的时间小于最小值,这期间将被设定成与最小值相等。该最小期间用来确保足够的喷油量通过电磁喷射阀20,以适当润滑分配器和燃油系统的其它元件。
然后到达框710,其中执行阀过程控制算法(VEC),该VEC算法是用来控制电磁喷射阀20和图1中所示的泵送阀18和19两者的,如果供油或者泵送过程是在给定的中断循环中发生,那么VEC算法将产生一个适当的泵送指令。VEC算法在下面将参照图9进行更为详细的说明。完成框710中的VEC算法后,供油指令转换算法(FCA)将在框712中继续并完成。
再参照图6,执行过程将到达框620,其中执行泵送指令转换算法PCA,PCA算法计算图1所示的泵的泵送控制阀18和19的适当阀门关闭角,并且转换这些阀门关闭角到适当的GPT计时器数字,直到控制阀应该关闭。更详细的PCA算法的数据流程可以参见图8的流程图。
在图8中,随着泵控制阀的关闭角的确定,过程开始于框800。在曲轴旋转的整个720°期间需要六个泵送过程(即泵14将在每三个可能的压缩冲程中执行)。因此,在每一个泵14中缸的完整循环将用去240°的曲轴转角。因而,三个完整的循环将用去所需的720°曲轴转角。另外,每一泵14的缸的循环中的120°将为泵14的压缩冲程。因此,由PCA算法确定的阀关闭角将在从表示一个整个范围的泵送过程的120°到表示没有泵送工作的0°之间的范围内。
在框800中执行的计算仅是一个阀门关闭角或者以轴转角表示的VCA。然后过程到达框802,其中VCA被转换成基于每个泵送过程的泵凸轮绝对上死点的相对关闭角。该相对阀门关闭角在框804中被转换成GPT计时器计数,表示在适当泵送控制阀18、19被关闭以实现一个期望的泵送过程的时间。
对于这一点,PCA算法的操作与上述的FCA算法的操作相类似。在框806中,框804中所计算的GPT计时器数值与来自框616的预定的时刻的计时器计时值相比较以确定是否在当前的中断间隔期间发生泵送过程。如果不发生泵送过程,则执行框814并且中断PCA算法。
如果PCA算法产生了泵送过程,则执行框808,随着泵送过程的适当泵14的选择而执行到框808。基于发动机位置和泵塞的TDC值,将会选择一个适当的泵。0°、240°和480°的TDC值相应于前泵14,而120°、360°和600°的TDC值则相应于后泵14。
随着用在控制阀经过VEC算法的适当值的产生而进入框810。框810也检查泵启动寄存器,以确保所选择的泵是可操作的。如果泵启动寄存器显示泵不可操作,那么就不会产生泵送定时值并且也不会执行VEC算法。
在框812中,PCA算法执行泵阀过程控制算法,其中,把正确的GPT计时值赋予68331的相应的输出比较寄存器。当GPT值与输出比较的计时值相对应时,微处理器将关闭控制电磁阀并且使燃油泵送到储压器12中。下面接着进行VEC算法,PC算法在框814中中断。
下面参照图9,它显示出了一张用于FCA和PCA算法的VEC算法图表。虽然仅讨论一个单个的VEC算法,但是本发明的最佳实施例则包括两个VEC算法的软件执行过程。第一个执行过程控制喷射控制阀20的工作,而第二个执行过程控制泵控制阀18和19的工作。由于对于供油过程和泵送过程可以紧接着发生,因此希望有两个分开的VEC算法。
如图9中所看到的那样,VEC算法开始于状态0 900,这种状态应该是VEC算法只要有一个来自FCA或者PCA算法的呼叫就会进入的状态。如果VEC算法不在状态0 900,那么算法将产生一个过程不能进行并且该过程是当前的等待程序的指示。当算法进入状态3,VEC算法将会检查是否有过程等待,并且如果有一个这种过程等待,那么VEC算法确定出是否过程等待仍然在继续0即,是否发动机的旋转位置又进入等待过程),如果这个过程已完成,且过程的初始化还没有通过,那么VEC算法将直接过渡到状态1,进行等待过程。如果等待过程的前缘或者初始化被错过,那么过程的输出将被强制到激活状态并且算法将过渡到状态2以加载期间值。如果过程的前缘被错过,VEC算法也将会把它作为一种诊断状态记录下来。相似地,如果两边缘都被错过,那么VEC算法也将会把它作为一种诊断状态记录下来,并且可以执行诊断算法。
在正常工作期间,状态0 900在当用来进行供油或者泵送过程的微处理器68331的输出比较被编程为进入一个非活动状态,以确保输出比较随时可以接收指令。VEC算法然后过渡到状态1 902。
在状态1 902中,算法加载适当的延迟值,直到供油或者泵送过程开始而把这些延迟值加载到适当的输出比较寄存器中。例如,在最佳实施例中,泵送过程使用输出比较3,而供油过程则使用输出比较1。当GPT计数器等于输出比较寄存器的值时,输出将变成活动的,这样开始了供油或者泵送过程,并且输出一个中断信号。根据中断的接受,VEC算法将过渡到状态2 904。
状态2 904将加载适当的泵送或者供油过程的期限值到输出比较寄存器中。通过这种方式,当GPT计数器等于进入输出比较的值时,泵送或者供油过程将中止。根据这一个中止,执行一个中断,并且VEC算法将过渡到状态3 906。状态3 906仅仅更新阀门的状态并且清除适当的控制寄存器,然后回到状态0 900等待另一个供油或者泵送的指令。
储压器压力感应和控制算法示于图3中,框302、304和306将参照图10一起进行讨论。图10显示出了一个储压器压力传感器取样算法(PSS)的流程图。该算法执行所有与发动机速度同步的用来控制储压器12中的压力的活动。这些活动包括储压器压力传感器22的数据获取及处理以及压力控制器的工作。根据本发明,由于所有压力的产生都是发动机速度的函数,所以这些过程都是与发动机转速同步的。
PSS算法随着压力传感器数据的获取而开始于框1000,它是通过从压力传感器22抽取数据并且用一个模数转换器将这些数据转换成数字信号而实现的。在储压器中相应于压力的数据然后被储存以备之后的压力算法使用。
然后执行框1002,在框100中抽取的原始压力信号被处理。这种处理包括对抽取的储压器压力数据的范围检查和过滤。这种计算的结果是得到了合适于保持压力算法的过滤的压力传感器值。
在框1004中,PSS算法执行储压器压力控制算法(PCR),在此,计算出一个适当的基于所需的压力设定值和测得的储压器压力的阀门关闭角(VCA)。VCA做为整个预期的泵送量的百分比而输出,因此,输出0%表示不需要泵送,而值100%则表示需要执行最大的泵送(全冲程)。为了计算VCA,PCR算法使用了一个比例微积分(PID)控制器,以本领域的那些熟知的技术进行工作,以跟踪所期望的压力设定值。
一旦适当的VCA被建立起来,PSS算法在框1006中止。所需的泵送动作,由PCA算法进行分析并且需要的话,泵送过程将相应于PSS算法计算出的VCA开始。从以上可以看出,对于本领域的技术人员可以很容易地了解到本发明提供了一个系统和方法,通过该系统和方法,为了保持一定压力,需要对储压器的压力进行监控和补充。
带有缩微胶片软件目录中登录的原代码的软件的上述描述将会使本领域的一个技术人员用一种根据本发明的燃油系统控制器,并且实现其有关的优点。
本发明的一些附加的特殊特征将下面进行描述。第一,参照图11a和11b,其中描述了一个可以与发动机燃料系统共同作用的装置,它提供了一个根据本发明的比率成型能力。通过降低喷射的初相位期间喷油嘴组件处燃油压力增加的速率,从而降低发动机喷入燃烧室的初期燃油量。本发明的各种不同的实施例将能够实现各种不同的目标。诸如更有效以及更完全的燃油燃烧,以降低污染。
首先参照图11a所示的实施例,一个比率成型装置通常由1100表示,位于沿燃油传送回路1102上(位于图1中的燃油喷射控制阀20和分配器16之间)。然而,比率成型装置可以使用任何形式的燃料传送系统。
如图11a所示,比率成型装置1100包括一个流动限制阀1104,它位于燃料传送回路1102中,并且还有一个比率成型燃料旁通阀1106,它位于旁通通道1108中。流动限制阀1104包括一个可滑动的活塞1110,它设置成可在活塞腔1112中滑动的形式,而该活塞腔1112则形成于燃油传送回路102中,从而形成一个燃料入口1114和一个燃料出口1116。可滑动活塞1110包括一个第一端部1118,它位于靠近燃料入口1114处,一个第二端部1120位于靠近接燃料出口1116处,并且一个中心孔1112从第一端1118向内延伸,以限定出一个内端1124,可滑动的活塞1110还包括一个外筒形表面1126,该表面与活塞腔1112的内表面形成十分紧密的滑动配合,构成表面1126和活塞腔1112的内表面之间的流体密封。可滑动活塞1110的第二端部1120包括一个锥形表面1128,在滑动活塞1110移动到图11a所示的右侧时,该锥形表面1128与形成于在分配器壳1132的燃料出口1116上的环形阀座1130相配合。
滑动活塞1110还包括一个不管可滑动活塞1110的位置如何均穿过第二端1120延伸的中心孔1134,以使流体通入带有流体出口1116的中心孔1122。一组第一级孔1136从中心孔1122上延伸穿过第二端部1120。第一级孔1136与阀座1130相关,从而使当流动限制阀1104位于图11a,所示的位置时(其后被称为第二级位置),从第一级孔1136到燃料出口1116的燃料流动通过锥形表面1128和阀座1130的接合而被封闭。流动限制阀1104包括一个弹簧腔1138,它形成于活塞1110和分配器壳1132之间,以容纳偏压弹簧1140。一个环形台肩1142形成于活塞1110上,以提供一个弹簧1140的弹簧座,从而将活塞向图11a所示的左侧压在第一级部分上。
旁通通道1108的一端通过活塞腔1112与燃料入口1114的一端相连,而其另一端与燃料出口1116相连。可滑动活塞1110包括一个径向槽1144,该槽位于第一端部1118的端面上,以使燃料在流动限制阀1104处于第一级位置时,让燃料流入燃料入口1114和旁通通道1108之间。比率成型旁通阀1106位于比率成型阀腔1146中的旁通通道1108上。比率成型旁通阀1106包括一个伸长的阀件1148,该阀件带有一个锥形阀表面1150,用来与形成于分配器壳1132中的环形阀座1152相配合。比率成型旁通阀1106最好是一种双位置双向压力平衡电磁操纵阀,该阀包括一个偏压弹簧1154,该弹簧设置成将升阀件1148压靠在阀座1152的关闭位置上的形式。电磁阀组件1156用于将阀件1148移到图11a的右侧,进入完全流动的开启位置,将锥形阀表面1150从环形阀座1152上分离开,从而形成旁通通道1108的流动。
通常,流动限制阀1140是用来控制或者成型喷油过程开始期间喷嘴组件压力比率的增加的,如图11b中级I和II所显示的那样,同样它也控制在喷射过程的末尾燃料通过传输线路的回流,从而减少燃料传送回路和与之相连的燃料喷射管路中的气穴。这种回流发生在喷射控制阀与排油管相连时。比率成型旁通阀1116通常是用来在希望建立最大压力或者喷油组件的最大压力时,迅速建立最大压力的,这是通过如图11b中级III所示的初期喷射时期之后,在燃料传送回路1102上提供一个非限制流通路径而实现的。
尤其是在工作期间,刚好位于开始喷射之前,喷射控制阀20处于与排出口相连的燃料传送回路1102的关闭位置。这时,流动限制阀位于其第I级位置,其第一端部1118抵靠在分配器壳体1132上,从而使燃料入口1114和燃料出口1116之间的流体连接即通过中心孔1134也通过第一级孔1136连接。比率成型旁通阀1106在偏压力弹簧1154的压力下处于关闭位置,从而切断了旁通通道1108中的流动。一旦喷射控制阀20被打开,从而将储压器的压力连通到燃料传送回路1102中,同时,高压燃料将开始从中心孔1134和第一级孔1136流入,从而形成最初的流动限制阀1104的压力增加瞬流,并且位于图11b中的级I所表示的相应喷射组件处。然而,在燃料入口1114处的储压器燃料压力作用在中心孔1112的第一端部1118和中心孔1122的内端1124的端面上,移动可滑动活塞1110到图11a中的右侧,并使可滑动活塞1110位于第II级位置,其锥形表面1128与阀座1130相配合。通过第I级孔1136的燃料流被截断,而一定量的燃料通过中心孔1134到燃料出口1116,这样就形成了如图11b中级II所示的喷射器组件处的燃料压力比率的减小。
经过由ECM13所确定的一段预定时间之后,比率成型旁通阀1106被打开到开启位置,从而允许燃料通过通道1108流动,产生一个燃料排出压力的急剧增加,如图11b中级II的向上倾斜的压力比率。喷油组件处的压力很快到达一个最大的值,直到喷射控制阀20关闭而限定的喷射过程的末尾。因此,如图11b所示,比率成型装置1100产生一个带有高压力比率流率增加的第一燃料喷射级(级I),一个带有降低了压力比率(小于级I)的第二燃料喷射级(级II)和一个压力增加之初大于级II的第三级。通过在喷射的初级(即级II)降低喷嘴组件处的压力增加,比率成型装置1100还降低了在初级期间排到内燃机燃烧室中的燃料量,而降低了由燃烧过程产生的污染程度。
关闭后,喷射控制阀20切断了来自储压器的燃料,将燃料传送回路1102连接到排出口。在仍由ECM13确定的一预定时间之后,比率成型旁通阀1106再次工作,并被偏压弹簧1154移到关闭位置。然而,应该明确,比率成型装置1100下游的燃料传送回路1102的压力的消除可以根据与喷射控制阀20相关的比率成型旁通阀1106的关闭定时,采用不同方式来控制和成型。如果比率成型旁通阀1106的关闭在燃料喷射控制阀20关闭后的足够长时间时才重新打开或者被延迟到这一时间,旁通通道1108将被作为基本的卸压通道使聚积的燃料回流到排出口,因而很快地释放了传送回路及相应的燃料喷射器下游的流体压力,而第二级减压流动则通过流动限制阀1104完成。然而关闭比率成型旁通阀1106的同时或者紧跟其之后,关闭喷射控制阀20,初级释放将通过流体限制阀1104产生。在上述情况下,一旦比率成型旁通阀1106关闭,燃料入口1114中的燃料压力便会低于燃料出口1116中的燃料压力。这样,与弹簧1140的偏压共同作用在第二端部1120上的活塞1110端面上的流体压力变得大于作用在活塞1110上用来使活塞1110向图11a中的右侧移动的流体压力。这样,流动限制阀1104的可滑动活塞1110将马上从图11a向左移到第一级位置,让第一级孔1136与燃料出口1116相连,而确保燃料通过孔1134和1136流过流动限制阀1104。中心孔1134和第一级孔1136的直径足够大,从而使其组合的截面流动面积在排出过程中产生足够的回流,以确保喷嘴组件有足够的燃料压力排放,从而防止二次喷射。换句话说,中心孔1134和第一级孔1136足够的小,以提供一个组合的流通面积,用来把回路和位于流动限制阀1104与喷嘴组件之间的喷射管路中的气穴现象减到最小的程度。因此,用流动限制阀1104作为一可变的流动阀在第一级和第二级位置之间移动,成功地利用喷射过程中的中心孔1134的限流特性,以规整压力增加率,并有效地控制传输过程期间的回流,即防止了二次喷射也减少气穴现象。
这种设计的一个优点是通过将比率成型旁通阀设置在喷射控制阀的下游而实现的。这种设置减少了通过阀1106而产生的泄漏损失。如果把阀设置在喷射控制的上游,侧泄漏量至少要增加四倍(假定期间是30°曲轴转角,并且发动机是六缸四冲程发动机)。
根据以上所述,对于本领域的技术人员来讲显而易见,喷射控制阀20(图1所示)以及比率成型装置1100的组合允许ECM13以不同的方式控制燃料压力。例如,如图11b所示,级II的曲线可以通过ECM13变化,以使中间压力的喷射期间缩短。这是通过比率成型旁通阀1106的控制可以对ECM13实施而完成的。
通过改变旁通阀1106的开度,可以实现如图11b中虚线所确定的压力波形。曲线1190可以在比率成型旁通阀1106在活塞1110靠在座1130时或者之后的一小段时间内打开。曲线1192表示了一个在比率成型旁通阀1106保持一个很长时间关闭之后一段时间而后再打开时的压力波形。
另外,单喷射阀20的使用有利于为本控制系统提供比率成型能力。使用单喷射阀的优点特别在于它确保了一个喷射过程期间的均匀不变的压力响应。本发明不会产生使用多个喷射阀时能够发生的那种变化,而且,可以形成对喷射压力波形更加精确的控制。
这一概念将参照图12a进行描述,该图描述了一个喷射压力率,其特征是它具有一个第一小的喷射压力脉冲,跟着有一个大的喷射期间更长的喷射脉冲。该喷射压力波形可以这样形成,例如通过使喷射阀20产生一个短期间的波动,从而产生出小一些的压力脉冲,然后操纵喷射阀20产生一个大一些的喷射压力波形。
由于本发明只采用了一个单个的喷射电磁阀,所以图12a中所示的压力波形对于发动机的所有气缸都是固定不变的。然而如图12b所示它使用了一个膨胀压力轴线,使用多个燃料喷射阀喷射燃料时,在现有技术的不同燃料喷射阀会发生偏差和变化,从而导致压力波形的不一致。这种的现象在本发明的初期压力脉冲的压力波形中很明显(图12a所示),因为很小的制造差异,对此时的脉冲的影响大大地大于其对更大、更长持续时间的喷射波形的影响。
单个的喷射控制阀20和压力比率成型装置1100的组合还可以用来产生附加的压力波形,由于是单个喷射控制阀20和单个比例成型旁通阀1106的设置,因而将会再次在发动机气缸之间形成一致的固定的压力波形。例如图13所示的压力波形将会通过上述的比率成型技术的组合而实现。
图13示出了一个包括有单个的相对较小的初级压力脉冲的压力波,紧跟着是一个大一些的多级的压力波。初级压力脉冲通过给喷射控制阀20一个波动而实现,而后,多级压力波形则通过比率成型旁通阀1106的使用而实现。这两个元件的其它新的组合产生本发明的压力波形对于本领域技术人员来说是显而易见的。
在本发明的最佳实施例中,燃料喷射电磁阀的驱动电路将带有一个后EMF检测电路,它根据由阀穿过电磁线圈区域的运动而产生的后EMF来检测电磁阀的开度。后EMF电路就可以在某些情况下取消电磁升压电路。
如上所述,由于在相对于活塞位置的精确时刻将燃料喷入气缸中,可以认为按照需要很快地开启阀门,减小了决定喷射到燃料真正进入气缸的时间的延迟。阀门操作速度的增加可以通过上述的“升压电路”获得。该升压电路使电池电压上升到更高的电压。当控制系统决定出喷射燃料到气缸中的时刻时,它在一个较短的时期内将这个高的电压施加到电磁线圈上,这将导致线圈中产生一个迅速的电流增加。这个阀而后由传统的电池电压保持在打开状态。图14以框图的形式示出了升压电路的工作。电池228与升压电路212相连,而该升压电路则与驱动电路238的一个入口相连。电池228也与驱动电路238的一个入口相连。感应于来自ECM13的一个喷射,驱动电路238首先接通升压电路100到175V的直流电压输出到线24,并且进而到达电磁喷射阀20,从而很快地打开该喷射阀20。然后,在一定时间之后,驱动电路238中断与升压电路212的连接,同时让电池电压连入电磁喷射阀20,用来保持电磁喷射阀20的打开。
虽然某些情况下升压电路是必需的,但使用升压电路时会产生很多明显的缺点。这种提高电池电压的电路通常需要一些元件,从而附加几十美元成本。在大批量生产中,这是很高的花费。另外,驱动电路耗用了不相称的物理空间。因为大的元件需要将低的直流电压转换成高的直流电压(主要是一个电感线圈和几个电容器,除此之外还有供电的半导体元件),它增加了电子控制部件(ECM)的体积,使得安装使用更加复杂。升压电路同时还有较高的失误率。由于供电电子元件在高的电压下工作,因而它的工作温度较高。这会导致一个比ECM的数字元件更高的失误率,从而增加了维修的费用以及设备的停机时间。最后,升压电路的使用还导致阀的应力的增加。由于目标促进阀以快的速度工作,阀就会以很大的力撞击阀座。就使得该阀与更慢开启的阀相比容易更快地被磨损坏。因而在本发明的另一个最佳实施例中,取消了升压电路。
在本发明的这个优选的实施例中,在喷射电磁阀驱动电路中设置有一个后EMF传感器,通过了解在所有的开启及变化时间状态下的阀的开启时刻,ECM13可以动态地补偿延迟,从而将燃料在不论阀的开启速度如何的正确时刻喷射燃料。当阀通过由线圈产生的电磁区域时,该后EMF传感器通过监视阀20产生的后EMF而检测阀的开度。该后EMF将总是与阀的运动相反,并且在阀运动期间其本身的电流明显下降,图15中显示出一个这种下降的典型的例子。阀开启以及运动进行的点总是倾斜度从负转为正的点,图中由T3表示。
图16示出了本发明的后EMF检测电路1600。后EMF检测电路1600包括一个感应电阻1602 、电容1604、运算放大器1606和1608,和二极管1610和1612。感应电阻1602连接在电磁阀20的线圈电路中,处于线圈和地之间。电容1604连在运算放大器1606的负极输入端和地之间。运算放大器1606的正极输入端连接在感应电阻1602端部与电磁备20相连处。运算放大器1608的负输入极接在运算放大器1606的负输入极上,并且运算放大器1606的负输出端则连接到运算放大器1608的正输入极。二极管1610和1612以相反的极性连接在运算放大器1608的正输入端和运算放大器的负输入端之间。该后EMF感应电路1600和后EMF输出端由运算放大器1608的输入端承担。
图17示出了与电磁阀20相应的以及与后EMF感应电路1600的工作相应的波形。在时刻T1之前,没有任何喷射过程,因此流过电磁感应线圈的电流是零,因而在感应电阻1602上未施加电压。在启动时,电路1600中的噪音将使运算放大器1606产生短暂的振动,直到电容1604在最低限度噪音之上释放一个值时,使运算放大器处于低的饱和状态。ECM13中的软件被编制成在要喷射时忽略上述各种振动的形式,以避免由噪音引起的误读。
在时刻T1,ECM13启动电磁阀20,电磁阀20的电感线圈中的电流成指数地上升,从而在感应电阻1602上产生电压升高等于通过电磁阀的电流乘以感应电阻1602的值。当电流升高后,二极管1612正向偏压,使运算放大器1608的正输入极的电压为一个高于其负输入极的二极管压力降,提高了其输出。这种状态一直保持到由于阀门的移动在时刻T2时开始的后EMF而使电流降低。在时刻T2,运算放大器1606继续使加在电容1604上的电压随加在感应电阻1602上的电压降而改变,这样,二极管1610变成正向偏压。这使得运算放大器1608的负输入极比正输入极电压高,从而使得其输出转变为低。当阀门在时刻T3转为停止时,喷射器电流的正向倾斜再次形成,从而使运算放大器1608的输出转为正向。这样,阀门的开启将产生两个明显的峰值,第一下落边缘(T2)表示运动的开始,而第二上升边缘(T3)表示运动已完成。运算放大器1608的输出与ECM13的微处理器相连,监测这些峰值以检测和测量该过程。在一个过程中测得的开启阀的时刻被储存成(T开=T3-T1),而测得的阀延迟时间则用来补偿定时指令开启阀的下一个过程。ECM还能够测量发布命令给阀的初期运动(T2-T1)的时刻和阀移动的时间(T3-T2),并将这些时间值储存起来,用于预测和诊断。例如这些值可以用时间储存并且分析,用统计控制技术产生改进阀门的可以导致操作问题的开启状态变化的警告。
这一个电路在本发明中还有特殊的优点。构成该电路所必须的元件的成本只是通常用在工业上产生同样效果所用设备成本的一小部分。其结果是不需要增加任何的传感器甚至不需要为阀增加任可导线就可以提供阀门运动及开启时刻的精确检测,可以节省更多的费用。通常在ECM13中容纳这些回路所需要的空间小于一平方英寸,而容纳升压系统或者是带有一个传感器的非升压系统的空间则需要几平方英寸,从而导数了需要大的ECM底板。通过取消供电电路而不增加传感器,整个控制系统的失误率将会降低。由于阀门更为缓慢的运动,也会延长其寿命。另外,这个后EMF感应方式本身就提供了能够用于检测机械和电子下降及失误的系统中的时间数据,这一情报可以用来在其不能够完成任务或者辅助技术及诊断出现问题时,警告操作者即将发生故障。
本实施例的附加的优点包括:降低了EMI问题的可能性,减少控制器内部的振动危险,且由于降低了阀的力,使燃料系统噪音减小。
在采用多位阀的情况下,阀的加速度损失将使阀处于特有的闭锁状态比规定值长的一段时间。在这种情况下,升压电路不能够被取消。在现有技术中,当采用升压电路时就不能使用这种后EMF传感器电路,因为,电磁线圈常常处于最大速度的饱和状态,而后EMF特性变得模糊不清。特别是,需要一定大的力提供一定大的加速度,这样一种不希望或者不确定的状态来快速移动阀门(F=mA)。由于力和质量流率密度(B)的平方成正比,质量流率密度通过增加场的强度(H)来达到最大。场的强度等于线圈匝数乘以通过线圈的电流,除以铁芯长度:H=N×I/L。B和H之间的关系对于典型的电磁阀示于图18中。
如上所述,通常要在最快的时间内得到最大的力,在阀开启之前电流以导致磁力的饱和的速率增加(如图18所示,在H>H1时,B/H曲线的水平部分工作)。由于是饱和的,因而不产生附加的力,而且在位置反馈的电流轨迹上,阀的后EMF不明显。
本发明的另外方面还发展了一种技术,该技术可以使用升压电路提供增加的力级,而避免磁芯饱和,从而防止后EMF监控。在该技术中,ECM和升压电路有设置成有选择地提供一个三种中之一种不同的电压级给电磁喷射阀。如图19所示,切换装置1902在ECM13控制下有选择地与第一升压电路212的电压、中间升压电路1900的电压、或者电磁喷射阀20的电池电压连接。在单个喷射过程中,三个不同的电压依次施加给阀20,开始是升压电路212的全升压电压,而后是中间升压电路1900的中间电压,然后再到低的电池电压。
相应于电磁阀移动的这些依次的电压作用的时刻对于得到所希望的结果是特别重要的。参见图20,在时刻T=0时,ECM值向阀发出开启指令,并施加升压电压,B以大的斜度开始倾斜,从而使阀门的加速度相一致。在时刻T1,ECM以预想的阀门开度降低通过磁芯的电压。时刻T1被选择成小于电压开始加到阀门之后阀门开启的最小延迟时间。随着电压被降到中间升压电压,曲线B的斜度降低,而避免了阀动之前的饱和。通过将时间T=T2,阀被开启。由于磁芯仍然没有达到饱和,这个阀的开度可以通过后EMF检测电路1600(在图16中详细示出)而测得。随着阀的开度的检测,ECM在切换到与将阀保持开启所需的力相应的电压水平上(总是小于移动阀所需的力),这通常是电池电压。由于阀已被开启,其加速度是0,因而阀的速度很快地被初期加速度达到最大,这更加有益于避免磁芯饱和,从而使后EMF检测用于诊断及控制目的。
在本发明另外一个最佳实施例中,如图21所示,控制系统可以在分配器和气缸喷射嘴之间设置补偿燃料管路2104长度不等的装置。特别是为ECM13提供了一个与ECM13的主处理器相连的管路长度存储器2102,它储存了每个气缸的管路长度值。储存的管路长度值表示出用于相应气缸的燃料管路的不同长度。ECM中的程序使用这些信息补偿不同的燃料管路长度。程序可以改变燃料喷射量以及送到喷射阀件24上的喷射控制阀20的接顺序启动工作信号的时刻。图22是本发明燃料线长补偿算法的流程图。第一级(图22中的框2200)确定哪一个气缸将准备下一个燃料喷射。如图1和图2所述的那样,在本发明中,气缸的识别是通过使用霍尔效应传感器的凸轮齿轮的位置来确定的,并且从ECM可以方便地确定发动机的角度位置,并且确定下一次向哪个气缸喷燃料。一旦在图21所示的系统中要喷射燃料的气缸被确定,则框到达2202,而且ECM13微处理器重新得到存储器2102中气缸的管路长度信息。下面在框2204中,ECM按照发动机工作参数(速度、负载、温度等等)用上述详细描述的方法计算出气缸所需的基本燃料量。然后参照以管路长度为函数的基本值在框2206中计算出其变化因素。通常,在喷射期间燃料管路中产生高压的情况下,燃料可以被压缩使之作为一弹簧元件。因而当管路长度增加时通常要向管路中注入更多量的燃料,以在管路的另外一端的喷嘴处获得一个给定的所希望的压力。因而,喷射变化量的因素是基本燃料量、管路的长度、在某些情况下还包括储压器压力的函数。在框2208中计算出一个要提供的燃料量的新值,燃料量变化值的增加和减少由基本燃料值确定。这一新值将是喷入的燃料量。
在框2210中,根据上述方法作为发动机工作参数函数的喷射正时确定出一个基本值。在框2212中,根据特殊气缸的管路长度而算出时间补偿。通常,当管路长度增加时,它会花费更长的时间将燃料压力从燃料管路中传送到气缸,因而如果没有调整定时,收在长的燃料管路远端的喷嘴将比短的燃料管路上连接的喷嘴要稍微晚一些开启,其它的都是相同的。定时的补偿被计算成与标准管路长度和特殊气缸实际管路长度之间的差相等。在框2214中,喷射信号的精确定时是通过启动基本定时值并且提前或推迟由计算的定时来补偿特殊气缸燃料管路长度计算的补偿定时所产生的喷射信号来确定。下面在框2216中,喷射以上述的方式进行,它对时间和燃料量进行了调整,以补偿各个气缸喷嘴的燃料管路长度。
通过这种方式,多个气缸的喷射控制信号依次经线24传递给燃料喷射阀20(如图21所示)。每个驱动信号的时刻都是根据将中心喷射控制阀与单个气缸相连的燃料管路的物理结构而单独调整。因为这个补偿特性特别能适用于在不同燃料管路长度的情况下使用,它也可以用在补偿燃料管路的其它物理变化,比如不同的曲率或直径。补偿不同的燃料管路物理布局的能力使材料和费用得到了节省,因为不需要为所有的气缸配置大致相等长度的燃料管路。另外,可以根据美观性、使用可靠性和安全性获得更好的线路布局方式。燃料比率控制的优点可以通过这些本发明的实施例而获得。
本发明的另外一个优选的实施例示出了一种装置和方法,它控制电磁阀以高速工作,但不需要高电压的升压电路,即,只需要用电池电压驱动电路。如前所述,这种电路有很多缺点,因此有可能的话最好取消升压电路,以降低失误和减少费用。这对于现有的系统并不都是可行的,因为它们的设计和系统限制了其无法容忍较慢的阀门驱动速度。
在该实施例中,提供了一个预先给阀一个偏压的电路,使得阀能够在驱动时不需要很大的电流就能够很快地启动。虽然为ECM13提供了一个可以改变产生电流的电路,该电路能够提供至少两个电流级:一个预先加有偏压的级和一个驱动阀的级。在所需的阀的开度之前确定时间,ECM有选择地增加线圈的电流,便电流沿倾斜线上升到等于略少于克服弹簧力以及阀的静磨擦阻力所需的力的水平。当开启阀的时刻到来时,预偏压的电流再增加到到达或超过引入值。这个电流已经接近这一值,在增加电流的时间内测得的阀门开启时间很短,即使电流加力状态只是电池电压。这一时刻随着更高的升压电压作为加力状态,与从0到引入倾斜的升压电路的时刻是可以比较的。
图23是升压系统驱动电流超越时间与根据本发明的这个实施例的预先施加偏压系统之间的比较图表。如图23所示,升压式系统是在预定的喷射T2时间启动,并且很快地通过时间T3上升到引入的电流级。而本发明的预先施加偏压系统产生的预先偏压电流在时间T1之前采用电池电压。当编程的喷射信号在时刻T2产生时,电池电流进一步增加,成为原动力,而在时间T4时使电流到达引入电流值,这只是在由升压系统实现的时间之后的很短时间。当然,由于该系统设计成产生一个预先施以偏压的电流关闭器来关闭引入的电流,预先偏压系统的时间滞后将被减少,从而使之有可能等于或者超过相应的升压系统的时间。另外,它也可以对预定的喷射信号进行调整,以补偿任何的延迟增加,这种延迟增加是由预先偏压的系统与升压系统相比而得出的。通过把偏压方法与上面讨论过的后EMF感应方法进行组合,定时便可以通过系统动态调整,以在它被升压系统打开的相同的时间开启阀门。
在本发明的另一个实施例中,该系统还带有在一段时间内监控储压器压力并且分析压力时间波形,以测量并且诊断活塞泵的失误的软件。图24a表示出通常来自另外一个泵送及供油过程的储压器压力变化结果。图24b表示出工作期间标准压力的异常的偏差,表示出其中一个泵没有正常工作。
由于在系统中的压力信号是由压力传感器的输出显示出来的,因此图24a中表示出了一个典型的压力信号。正如上面所描述的工作那样,为每一个供油过程都提供了一个泵送过程,而泵的大小被以下述方式确定,即,所有的供油过程都会被下一个泵送过程完全补偿。
万一一个泵送装置失效,波形将会象如24b所示的那样。失效时的读数与上一个读数之间的差别将会非常大,ECM可以通过注意这种现象的重复率来确定,即,活塞泵都使用的每次“N”都有一个与活塞泵“N-1”所产生的相比较的压力差。然后ECM将会记录失误到联系机构,并且使相应仪表板上的警告灯闪亮,以提醒操作者。
本发明的这一个实施例上述的设计特征的优点,其中压力读数随着发动机的位置而同获取,即,在发动机每转的同一点上获取。因而泵的失效可以不需要很宽波形范围过滤分析并且使用图25中的流程所示的算法进行计算就能够检测到。如图25所示,在该实施例中确定出了一个读取储压器压力的软件,依靠发动机同步中断的运动进行修改,执行框2500并且以上述的方式读取储压器压力并通过A/D转换器传送到微处理器中。当前的压力值被储存在框2502中的内存中,用于至少下一个泵送循环。然后控制进入框2504,其中当前压力值被从内存中储存的至少测得的压力值中减去。在框2506中,依次测得的压力值之差的绝对值与预定的故障临界值相比较。如果这一差别大于故障临界值,控制就进入框2508和2510,故障在其中被记录并且相应地警告操作者。如果这个差别小于故障值,便不报告失误而且储压器压力监控的操作以及控制算法将以上述方式继续进行。故障值被选择成大于任何储压器压力的预期的操作波动,以避免误报警。然而,故障值必须设定到足够小,使一个泵的失效可以使用刚才描述的算法检测到。
图27所示的本发明另一个实施例提供了一种改进的发动机控制,它主要不是用在汽车的推进器上,而是如同步速度内燃机发电装置中。如图27所示,这种发电装置包括一台电机2700和一台发电机2702,通过开关2704与电力输出设备2706相连。电机2700带有燃料系统和一个在此所公开的形式的电子喷射控制系统,为了更清楚地表示,在此只示出了ECM13、喷射阀20和泵送阀18/19,传感器输出则如上所述同电机连到ECM13。重要的是还从2704到ECM13提供了一条控制信号线2708。
在这种形式应用中,2700的负载的急剧增加是在开关2704开始将大量的电能从发电机2702引入时发生。典型的是电机2700由采用反馈控制技术以保持发动机按希望的速度工作的ECM13来控制,例如保持在1800rpm。当负载大大增加时,电机2700必须产生更多的电能去保持这一必需的速度。本发明人发现,随着采用更传统的系统在负载增加时通常会暂时降低发动机转速,直到反馈控制器测得速度的下降,从而通过控制传送结果控制信号并且供油系统再向气缸内供入更多的燃料。而在本发明的改进中,增加负载的控制状态(诸如开关2704将发电机2702与设备2706相连)是在通过线2708输入到ECM13时提供的,由ECM13监控负载连接状态。在收到负载已增加的信号的同时,ECM13在预定的时间之前越过同步控制程序所建立的燃料级,在该预定的时间期间建立一个预定的增加的燃料级,从而对下一个燃烧过程的发生产生效果。通过这种方式,随着发动机负载增加的同时,发动机的功率会立即增加,而不是主要依靠相应于负载而带来的发动机工况变化。由于有这种高的供油系统响应和迅速的控制响应,因此就可以随着负载的增加同步增加发动机的功率,所以它不可能使用这样的系统,即,很少采用尖端的控制技术或者具有很大的供油控制信号以及真实燃料运送的传送延迟以及燃料喷射系统的压力增加。因而在这里公开的改进供油和控制系统的范围内,这一概念将有很大的优点。
Claims (17)
1.一种用于多缸内燃机的带集成电子控制的燃油输送和控制系统(10),包括:
高压储压器(12);
储压器压力传感装置(22),用于产生一个表示在所述高压储压器(12)中燃油压力的压力信号;
至少第一和第二高压泵腔,用于在泵入过程变化期间有选择地向所述高压储压器(12)供应燃油;
压力传递执行装置(18,19),用于分别依据泵控制信号有选择地启动所述泵入过程将燃油从所述第一和第二高压泵腔送入所述高压储压器(12)中;
燃油分配器(16);
多条燃油供给管路,与所述燃油分配器(16)连接,用于向内燃机各汽缸分别供应燃油;
电控电磁阀装置,与所述高压储压器(12)和所述燃油分配器(16)连接;
电磁阀执行装置,用于按一阀控制信号打开所述电控电磁阀装置,以便在所述电控电磁阀装置启动下的选定时间使燃油从所述高压储压器(12)通过所述燃油分配器(16)流入内燃机各汽缸的各个燃烧室中;以及
控制装置(13),与所述储压器压力传感装置(22)和所述压力传递执行装置(18,19)连接,并与所述电磁阀执行装置连接;
其特征在于:
还设有发动机位置传感装置(31),用于产生一个表示相对于一基准位置的发动机转角位置的位置信号;并且
所述泵入过程具有与发动机转角位置相关的可变启动时间和限定的终端时间;
所述控制装置(13)包含存储器和一个微处理器,存储器用来储存程序,微处理器与所述存储器相连,带有电输入端和输出端,以读出和执行所述程序,所述控制装置(13)也与所述发动机位置传感装置(31)相连,用于监视所述发动机转角位置和监视与所述转角位置同步的储压器压力,以及有选择地产生泵控制信号,以便在相对于发动机转角位置变化的各计算时间启动所述泵入过程,从而改变该泵入过程的期限以在所述高压储压器(12)内保持所需的压力范围;
所述电控电磁阀装置只包含一个由电控制的电磁阀(20);
只有一条控制线(24)与所述电磁阀执行装置相连,用于传送所述阀控制信号;以及
所述控制装置(13)在须要将燃油成功地喷入通过所述燃油分配器(16)而与所述高压储压器(12)流体相连的内燃机各汽缸的每个燃烧室中时工作,从而有选择地在与所述转角位置同步的每个周期的各计算时间产生多个所述阀控制信号。
2、如权利要求1所述的系统,其中所述的微处理器在发动机转动期间以标准的时间间隔接收所述的位置信号,并且根据各间隔时的发动机角度位置有选择地进行如下操作:(1)阀计时操作,以便在经过一预定的时间后产生所述的电磁阀控制信号,和(2)泵计时操作,以便在经过一预定的时间后产生所述的泵控制信号之一。
3、如权利要求2所述的系统,其中还包括一个中断装置,用以周期性地根据所述的位置信号产生一个微处理器中断信号。
4、如权利要求3所述的系统,其中所述的中断装置在发动机转动30度以后中断微处理器。
5、如权利要求2所述的系统,其中还包括一个与控制装置相连的发动机运行状态感应装置,以便提供关于当前发动机运行状态参数的信息。
6、如权利要求5所述的系统,其中还包括一个与所述的微处理器相连的可变定时装置,以便在所述的阀定时器功能和泵定时器功能的所述控制信号产生以前,根据所述的发动机运行状态感应装置所提供的信息,动态改变编程的经过时间。
7、如权利要求1所述的系统,其中所述的发动机位置传感装置包括:用以在转动轴的一个特定位置处产生一个信号的位置检测装置,用以产生指示发动机速度的信号的转动速度检测装置,和位置计算装置,所述的位置计算装置用以接收所述的位置检测信号和所述的转动速度检测信号,并产生表示相对于一个基准位置的发动机转动的角度位置的位置信号。
8、如权利要求1所述的系统,其中还包括一个起动激励装置,该装置用以产生一系列重复的所述泵控制信号,以便激励所述第一和第二泵室中的至少一个在发动机起动期间且在发动机位置传感装置提供一个准确表示发动机角度位置的信号以前使储压器加压。
9、如权利要求1所述的电控制系统,其中所述的燃油喷射系统包括:位于所述的电控电磁阀和所述的各燃烧室之间的比率成型装置,用以在燃油喷射期间动态改变供入燃烧室中的燃油压力,其中所述的控制装置还包括与所述的比率成型装置相连的比率成型控制装置,以便在燃油喷射期间产生控制信号以动态改变供入燃烧室中的燃油压力。
10、如权利要求1所述的系统,其中还包括与所述的电磁阀操作装置相连的后EMF检测装置,用以根据供入电磁阀的驱动电流通过电信号检测电磁阀机械运动的开始和结束。
11、如权利要求10所述的系统,其中所述的后EMF检测装置包括两个运算放大器,每个放大器具有正和负输入端以及一个输出端,第一运算放大器的正输入端与电磁阀线圈的电路中的感应电阻相连,第二运算放大器的正输入端与第一运算放大器的输出端相连,第一和第二运算放大器的负输入端通过一个中断装置接地,第二运算放大器的正、负输入端由一个二极管网连接,以使电流从第二运算放大器的正、负输入端中的一个流到其中的另一个中,第二运算放大器的输出端用以提供一个表示电磁阀运动的输出信号。
12、如权利要求1所述的系统,其中所述的电磁阀执行装置还包括多级升压装置,用以有选择地向电磁阀的线圈提供三个电压级中的一个,其中:第一电压级是在收到阀控制信号时提供的;第二电压级低于第一电压级,在所述的电磁阀打开以前第二电压级替代所述的第一电压级,所述的第二电压级设置的电压不至使线圈饱和;第三电压级低于第二电压级,在所述的电磁阀打开以后,第三电压级代替第二电压级,以将所述的电磁阀保持在一个开启的位置上。
13、如权利要求12所述的系统,其中还包括与所述的电磁阀操作装置相连的后EMF检测装置,用以根据供入电磁阀的驱动电流通过电信号检测电磁阀机械运动的开始和结束。
14、如权利要求1所述的系统,其中所述的燃油喷射系统具有位于分配器和各燃烧室之间的多个燃油管路,上述燃油管路中的至少两个的长度不等,所述的电控系统还包括用于储存一个随分配器和相应的燃烧室之间的燃油管路长度而变的相关的值,和用于改变阀控制信号的喷射指令改变装置,以补偿燃油管路长度的不同。
15、如权利要求1所述的系统,其中电磁阀执行装置还包括用于有选择地向电磁阀的线圈提供两个电流级中的一个的预偏置装置,其中:第一电流级低于电磁阀的引入电流,在所述的电磁阀开始激励以前将其施加到线圈上;第二电流级等于或高于引入电流,根据表示需要燃油喷射的阀控制信号将该电流施加到线圈上。
16、如权利要求1所述的系统,其中还包括一个与控制装置相连的泵操作监视装置,该装置用以:储存至少一个与所述的第一和第二泵腔中的一个相关的前次测出的储压器压力值;比较与上述的第一和第二泵腔中的另一个相关的当前储压器压力值与所述的前次测出的压力值;并且在当前值与前次值之间的差值超过一个预定的储存值时提供一个指示信号。
17、如权利要求1所述的系统,其中还包括:速度控制装置,用以改变燃油供给量,以便根据一个固定的发动机负荷的增加和卸去保持一个恒定的发动机速度;操作者输入装置,以接收一个表示所述的固定负荷已施加的指示信号;和加载响应装置,以便根据所述的固定负荷已施加的信号增加供给发动机的燃油量。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US23885994A | 1994-05-06 | 1994-05-06 | |
| US238,859 | 1994-05-06 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1116686A CN1116686A (zh) | 1996-02-14 |
| CN1056668C true CN1056668C (zh) | 2000-09-20 |
Family
ID=22899621
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN95107103A Expired - Fee Related CN1056668C (zh) | 1994-05-06 | 1995-05-05 | 储压器燃油系统的电控系统 |
Country Status (6)
| Country | Link |
|---|---|
| EP (1) | EP0681100B1 (zh) |
| JP (1) | JP2865588B2 (zh) |
| CN (1) | CN1056668C (zh) |
| AT (1) | ATE215178T1 (zh) |
| BR (1) | BR9501935A (zh) |
| DE (1) | DE69525986T2 (zh) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6149073A (en) * | 1994-05-18 | 2000-11-21 | Cummins Engine Company, Inc. | Ceramic plunger for internal combustion engine high pressure fuel system |
| US6016791A (en) * | 1997-06-04 | 2000-01-25 | Detroit Diesel Corporation | Method and system for controlling fuel pressure in a common rail fuel injection system |
| JP3317202B2 (ja) * | 1997-08-04 | 2002-08-26 | トヨタ自動車株式会社 | 蓄圧式エンジンの燃料噴射制御装置 |
| DE19735560B4 (de) * | 1997-08-16 | 2007-06-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung eines Verbrauchers |
| DE19757594C2 (de) * | 1997-12-23 | 2002-11-28 | Siemens Ag | Verfahren und Vorrichtung zur Funktionsüberwachung eines Druckreglers |
| JP2001263142A (ja) * | 2000-03-15 | 2001-09-26 | Hitachi Ltd | 内燃機関用燃料噴射装置 |
| US7406949B2 (en) * | 2006-11-06 | 2008-08-05 | Caterpillar Inc. | Selective displacement control of multi-plunger fuel pump |
| JP4338742B2 (ja) | 2007-03-09 | 2009-10-07 | 三菱電機株式会社 | 内燃機関の高圧燃料ポンプ制御装置 |
| JP4650449B2 (ja) * | 2007-04-05 | 2011-03-16 | 株式会社デンソー | 燃料供給装置 |
| DE102009048981B4 (de) * | 2009-10-09 | 2016-12-29 | Dspace Digital Signal Processing And Control Engineering Gmbh | Vorrichtung zum Testen einer elektrischen Komponente |
| EP2336533A3 (de) * | 2009-12-19 | 2014-08-06 | DEUTZ Aktiengesellschaft | Verfahren zur Erkennung und Bestimmung einer defekten Hochdruckpumpe eines Common-Rail-Systems mittels Sensorsignalen und Steuergerät an einer Brennkraftmaschine |
| EP2551510A4 (en) * | 2010-03-25 | 2016-08-24 | Keihin Corp | STRUCTURE ARRANGEMENT FOR A DRIVE SWITCHING |
| JP5358621B2 (ja) | 2011-06-20 | 2013-12-04 | 日立オートモティブシステムズ株式会社 | 燃料噴射装置 |
| US9228482B2 (en) * | 2012-09-07 | 2016-01-05 | GM Global Technology Operations LLC | System and method for diagnosing a fault in a switchable water pump for an engine based on a change in crankshaft speed |
| DE102012224004A1 (de) * | 2012-12-20 | 2014-06-26 | Robert Bosch Gmbh | Hochdruckeinspritzsystem |
| CN104895716B (zh) * | 2015-04-15 | 2017-09-29 | 中国航发北京航科发动机控制系统科技有限公司 | 一种用于燃油分配器的燃油储存装置 |
| JP6464076B2 (ja) * | 2015-11-17 | 2019-02-06 | ヤンマー株式会社 | 燃料噴射ポンプ |
| DE102016219959B4 (de) * | 2016-10-13 | 2018-06-21 | Continental Automotive Gmbh | Verfahren zum Überprüfen einer Kalibrierung eines Drucksensors eines Kraftfahrzeug-Einspritzsystems sowie Steuervorrichtung, Hochdruckeinspritzsystem und Kraftfahrzeug |
| CN109083791B (zh) * | 2018-09-30 | 2019-09-27 | 潍柴动力股份有限公司 | 发动机喷油驱动的故障检测方法及故障检测装置 |
| CN111102257B (zh) * | 2018-10-29 | 2021-04-27 | 株洲中车时代电气股份有限公司 | 液压缸同步控制方法及用于控制多液压缸同步动作的系统 |
| CN109637092A (zh) * | 2018-11-23 | 2019-04-16 | 鑫益能机电科技(厦门)有限公司 | 一种可燃性气体检测控制装置及系统 |
| JP7172756B2 (ja) * | 2019-03-08 | 2022-11-16 | 株式会社デンソー | 高圧ポンプの制御装置 |
| IT201900010059A1 (it) * | 2019-06-25 | 2020-12-25 | Bosch Gmbh Robert | Sistema e metodo di controllo di una elettrovalvola di dosaggio in un gruppo di pompaggio per alimentare combustibile ad un motore a combustione interna |
| CN110807252B (zh) * | 2019-10-29 | 2021-06-25 | 山东师范大学 | 高压油管单向减压阀的最佳开启时长动态计算方法及装置 |
| KR20210104317A (ko) * | 2020-02-17 | 2021-08-25 | 현대자동차주식회사 | 인젝터 열림 시간 편차 개선을 위한 연료 분사 제어 장치 및 방법 |
| CN113958393B (zh) * | 2021-12-22 | 2022-04-22 | 深圳市鑫鸿发环保设备有限公司 | 一种混合动力电动汽车废气截流传热再利用装置及其方法 |
| CN115573965B (zh) * | 2022-12-07 | 2023-03-21 | 太原理工大学 | 一种多功能电液流量控制阀及流量控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0068924A2 (en) * | 1981-06-23 | 1983-01-05 | Allied Corporation | Fuel injection pump |
| EP0340807A2 (en) * | 1982-09-16 | 1989-11-08 | Bkm, Inc. | Method and Apparatus for Precisely Controlled Fuel Injection in Internal Combustion Engine |
| WO1993023667A1 (en) * | 1992-05-18 | 1993-11-25 | Paul Marius A | Fuel injector system |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5652535A (en) * | 1979-10-08 | 1981-05-11 | Nissan Motor Co Ltd | Fuel supply device for compression ignition engine |
| JPS60132037A (ja) * | 1983-12-21 | 1985-07-13 | Hitachi Ltd | 内燃機関の燃料噴射装置 |
| US4884549A (en) * | 1986-04-21 | 1989-12-05 | Stanadyne Automotive Corp. | Method and apparatus for regulating fuel injection timing and quantity |
| JP2690734B2 (ja) * | 1987-09-16 | 1997-12-17 | 株式会社デンソー | 可変吐出量高圧ポンプ |
| JP2590499B2 (ja) * | 1987-12-03 | 1997-03-12 | トヨタ自動車株式会社 | 内燃機関の燃料噴射装置 |
| JPH0256854U (zh) * | 1988-10-17 | 1990-04-24 | ||
| JP3033214B2 (ja) * | 1991-02-27 | 2000-04-17 | 株式会社デンソー | 複数の燃料圧送手段による蓄圧式燃料供給方法及び装置と、複数の流体圧送手段を有する機器における異常判断装置 |
| JP3010777B2 (ja) * | 1991-05-15 | 2000-02-21 | トヨタ自動車株式会社 | 内燃機関の燃料噴射制御装置 |
| JPH05106495A (ja) * | 1991-10-15 | 1993-04-27 | Nippondenso Co Ltd | 内燃機関の蓄圧式燃料噴射装置 |
| DE4304967A1 (de) * | 1992-04-25 | 1993-10-28 | Bosch Gmbh Robert | Kraftstoffeinspritzeinrichtung für Brennkraftmaschinen |
| JPH06200800A (ja) * | 1992-12-28 | 1994-07-19 | Nippondenso Co Ltd | ディーゼル機関の蓄圧式燃料噴射装置 |
| JP3360336B2 (ja) * | 1993-01-12 | 2002-12-24 | 株式会社デンソー | 内燃機関の燃料噴射装置 |
-
1995
- 1995-05-03 AT AT95106632T patent/ATE215178T1/de active
- 1995-05-03 DE DE69525986T patent/DE69525986T2/de not_active Expired - Fee Related
- 1995-05-03 EP EP95106632A patent/EP0681100B1/en not_active Expired - Lifetime
- 1995-05-05 BR BR9501935A patent/BR9501935A/pt not_active IP Right Cessation
- 1995-05-05 CN CN95107103A patent/CN1056668C/zh not_active Expired - Fee Related
- 1995-05-08 JP JP7109836A patent/JP2865588B2/ja not_active Expired - Lifetime
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0068924A2 (en) * | 1981-06-23 | 1983-01-05 | Allied Corporation | Fuel injection pump |
| EP0340807A2 (en) * | 1982-09-16 | 1989-11-08 | Bkm, Inc. | Method and Apparatus for Precisely Controlled Fuel Injection in Internal Combustion Engine |
| WO1993023667A1 (en) * | 1992-05-18 | 1993-11-25 | Paul Marius A | Fuel injector system |
Also Published As
| Publication number | Publication date |
|---|---|
| DE69525986D1 (de) | 2002-05-02 |
| ATE215178T1 (de) | 2002-04-15 |
| JP2865588B2 (ja) | 1999-03-08 |
| JPH0842382A (ja) | 1996-02-13 |
| DE69525986T2 (de) | 2002-12-19 |
| EP0681100B1 (en) | 2002-03-27 |
| BR9501935A (pt) | 1995-12-19 |
| EP0681100A2 (en) | 1995-11-08 |
| EP0681100A3 (en) | 1998-06-17 |
| CN1116686A (zh) | 1996-02-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1056668C (zh) | 储压器燃油系统的电控系统 | |
| CN1298984C (zh) | 通过估算动能和停止位置来控制发动机旋转停止的装置 | |
| CN1072306C (zh) | 缸内喷射内燃机用的燃料喷射控制系统 | |
| US8418677B2 (en) | High pressure fuel pump control system for internal combustion engine | |
| CN100523464C (zh) | 设计用于使内燃机的燃烧噪声最小化的燃料喷射控制设备 | |
| US5678521A (en) | System and methods for electronic control of an accumulator fuel system | |
| CN100540880C (zh) | 可监视燃料泵入口异常压力的燃料喷射系统 | |
| CN101305171B (zh) | 用于内燃机的控制装置 | |
| US20090090331A1 (en) | Volumetric Efficiency Based Lift Pump Control | |
| CN1912370A (zh) | 通过估算动能和停止位置来控制发动机旋转停止的装置 | |
| CN102108909A (zh) | 缸内喷射式内燃机的控制装置 | |
| CN101418744A (zh) | 进气量校正设备 | |
| CN1735746A (zh) | 内燃机的燃料喷射控制装置 | |
| CN1745244A (zh) | 内燃机的控制装置 | |
| CN1661221A (zh) | 发动机燃料喷射控制部件 | |
| CN103502622A (zh) | 内燃机的燃料喷射控制系统 | |
| CN1788153A (zh) | 燃料泵控制装置及燃料泵控制方法 | |
| US6973919B2 (en) | Internal combustion engine and method, computer program and control apparatus for operating the internal combustion engine | |
| CN1519465A (zh) | 燃油喷射系统 | |
| CN1626786A (zh) | 低发热量的燃料喷射系统 | |
| CN101473128B (zh) | 用于喷油嘴阀特性匹配的方法和装置 | |
| US20120240669A1 (en) | Abnormality determination apparatus and abnormality determination method for multi-cylinder internal combustion engine | |
| CN102245884B (zh) | 用于带有共轨系统的内燃机的控制和调节方法 | |
| US10655555B2 (en) | Engine system and method of controlling engine system | |
| KR20170012030A (ko) | 내연 엔진의 실린더 내로 연료를 분사하기 위한 전자 제어식 분사 디바이스를 검사하는 방법 및 대형 디젤 엔진 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C06 | Publication | ||
| PB01 | Publication | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C19 | Lapse of patent right due to non-payment of the annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |