CN100549863C - 图像形成装置 - Google Patents
图像形成装置 Download PDFInfo
- Publication number
- CN100549863C CN100549863C CNB2007100914648A CN200710091464A CN100549863C CN 100549863 C CN100549863 C CN 100549863C CN B2007100914648 A CNB2007100914648 A CN B2007100914648A CN 200710091464 A CN200710091464 A CN 200710091464A CN 100549863 C CN100549863 C CN 100549863C
- Authority
- CN
- China
- Prior art keywords
- image
- transfer belt
- processing system
- image processing
- intermediate transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images



































Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/14—Apparatus for electrographic processes using a charge pattern for transferring a pattern to a second base
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/01—Apparatus for electrographic processes using a charge pattern for producing multicoloured copies
- G03G15/0105—Details of unit
- G03G15/0131—Details of unit for transferring a pattern to a second base
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/14—Apparatus for electrographic processes using a charge pattern for transferring a pattern to a second base
- G03G15/16—Apparatus for electrographic processes using a charge pattern for transferring a pattern to a second base of a toner pattern, e.g. a powder pattern, e.g. magnetic transfer
- G03G15/1605—Apparatus for electrographic processes using a charge pattern for transferring a pattern to a second base of a toner pattern, e.g. a powder pattern, e.g. magnetic transfer using at least one intermediate support
- G03G15/161—Apparatus for electrographic processes using a charge pattern for transferring a pattern to a second base of a toner pattern, e.g. a powder pattern, e.g. magnetic transfer using at least one intermediate support with means for handling the intermediate support, e.g. heating, cleaning, coating with a transfer agent
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F3/00—Input arrangements for transferring data to be processed into a form capable of being handled by the computer; Output arrangements for transferring data from processing unit to output unit, e.g. interface arrangements
- G06F3/12—Digital output to print unit, e.g. line printer, chain printer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00135—Handling of parts of the apparatus
- G03G2215/00139—Belt
- G03G2215/00143—Meandering prevention
- G03G2215/00156—Meandering prevention by controlling drive mechanism
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/00135—Handling of parts of the apparatus
- G03G2215/00139—Belt
- G03G2215/00143—Meandering prevention
- G03G2215/0016—Meandering prevention by mark detection, e.g. optical
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0103—Plural electrographic recording members
- G03G2215/0119—Linear arrangement adjacent plural transfer points
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0103—Plural electrographic recording members
- G03G2215/0119—Linear arrangement adjacent plural transfer points
- G03G2215/0122—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt
- G03G2215/0125—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt the linear arrangement being horizontal or slanted
- G03G2215/0129—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt the linear arrangement being horizontal or slanted horizontal medium transport path at the secondary transfer
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0103—Plural electrographic recording members
- G03G2215/0119—Linear arrangement adjacent plural transfer points
- G03G2215/0138—Linear arrangement adjacent plural transfer points primary transfer to a recording medium carried by a transport belt
- G03G2215/0141—Linear arrangement adjacent plural transfer points primary transfer to a recording medium carried by a transport belt the linear arrangement being horizontal
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0151—Apparatus for electrophotographic processes for producing multicoloured copies characterised by the technical problem
- G03G2215/0158—Colour registration
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- General Engineering & Computer Science (AREA)
- Electrostatic Charge, Transfer And Separation In Electrography (AREA)
- Control Or Security For Electrophotography (AREA)
- Color Electrophotography (AREA)
Abstract
一种图像形成装置,其可以减少由该装置中升高的温度导致的颜色移位和图像模糊,并形成高质量图像,而不会导致该装置成本和尺寸的增加。图像传感器单元读取中间转印带的表面图案。数字信号处理器(DSP)基于由图像传感器单元读取的所述带的表面图案来控制带在垂直于其运动方向的横向方向上的运动。
Description
技术领域
本发明涉及一种诸如彩色复印机或彩色激光打印机的图像形成装置。
背景技术
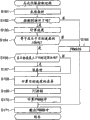
如图24所示,作为传统图像形成装置的图像形成装置1001包括作为承载和传送转印材料P的转印材料承载部件的转印带1005。在该图像形成装置1001中,用于黄色(Y)、品红(M)、青色(C)和黑色(Bk)的处理盒(下文中简称为“盒”)以级联方式沿着转印带1005的转印材料承载表面布置。在盒1014至1017上方,与各盒1014至1017关联地设置光学单元1018、1019、1020、1021。在盒1014至1017下方,设置与作为各盒1014至1017的图像承载部件的各感光鼓1006、1007、1008、1009相关联的转印辊1010、1011、1012、1013,其中在感光鼓1006、1007、1008、1009和转印辊1010、1011、1012、1013之间插有转印带1005。
利用上述设置,通过公知的电子照相过程获得的黄色、品红、青色和黑色调色剂图像以重叠方式转印到由拾取辊1003和片材进给及传送辊对1029从片材盒1002进给到转印带1005的转印材料P上。由定影单元1022将转印到转印材料P上的调色剂图像定影,并通过排出片材传感器1024和片材路径1023从该装置中排出。
为了在转印材料P的反面上也形成调色剂图像,将转印材料P在经过定影单元1022之后又通过另一个片材路径1025传送到转印带1005上,并按照类似于上述方式的方式在转印材料P的反面上形成调色剂图像。
应当注意由转印带驱动辊1004旋转地驱动转印带1005。
在图像形成装置1001中,用于各种颜色的光学单元1018至1021通过用激光束L1、L2、L3、L4照射相应感光鼓1006至1009的表面来扫描各表面,由此在各感光鼓1006至1009的表面上形成潜像。在图像形成装置1001中执行的图像形成操作序列中,控制激光束L1、L2、L3、L4以同步执行扫描,从而可以从所传送的转印材料P上的预定位置开始转印图像。
图像形成装置1001包括驱动片材进给及传送辊对1029的片材进给及传送马达、驱动转印带驱动辊1004的转印带驱动马达、驱动各颜色感光鼓1006至1009的感光鼓驱动马达、驱动定影单元1022的定影辊对1022a的定影辊驱动马达等等(它们都没有示出)。为了形成令人满意的图像,将这些马达控制在固定的旋转速度。
但是,利用传统的图像形成装置,可能存在内部温度由于合并入定影单元中的加热器的温度控制和/或驱动马达的加热而上升、并且转印带驱动辊由于温度上升而热膨胀从而导致转印带的速度增加的情况。在这种情况下,当将各种颜色的调色剂图像以重叠的方式转印到转印材料的指定位置上时,发生所谓的颜色移位从而导致图像质量明显下降。具体地说,由于感光鼓和转印带驱动辊被控制为以固定速度旋转,该转印带驱动辊的圆周速度随着转印带驱动辊的直径由于热膨胀导致的增加而提高,结果转印带的速度提高从而导致颜色移位。
作为解决上述问题的方法的例子,有一种方法在转印带上形成颜色移位检测图案并由传感器读取该颜色移位检测图案,以检测各颜色的颜色移位的相对量,并基于该检测结果校正通过激光束对各颜色进行的图像写入的开始位置,也就是执行对准校正。但该方法存在以下问题:
(1)尽管在刚刚对准校正之后各颜色的图像写入的开始位置可以处于对准状态,但是例如在连续打印的情况下,因为该装置中的温度进一步升高,转印带的圆周速度逐渐增加,由此在打印完多张片材后,颜色移位量很大。
(2)为了解决这个问题,例如可以在每当打印完预定数量的片材之后执行对准校正,但是频繁的对准校正会降低图像形成装置的吞吐量。此外,由于在对准校正期间在转印带上形成对准校正图案,因此调色剂的消耗增加,从而导致用户的成本效益降低。
作为用于校正颜色移位的另一种方法示例,有一种方法预先在转印带上形成对准参考标记,并通过CCD传感器检测该对准参考标记,基于检测结果来校正图像写入位置(例如参见日本公开专利出版物(Kokai)2000-071522)。
但在该方法中,由于需要预先在转印带上形成参考标记,因此转印带的制造成本很高,而且该装置必须很宽才能在转印带上确保参考标记的空间。
这种问题也出现在具有中间转印部件的图像形成装置中。
此外,传统的图像形成装置具有用于进给和传送转印材料的片材进给及传送辊对。当转印带的速度随着装置中温度的升高而增加时,由片材进给及传送辊对施加的转印材料传送力和由转印带施加的转印材料传送力之间的差增加,从而造成颜色移位和图像模糊。当通过片材进给及传送辊对施加的转印材料传送力大于由转印带施加的转印材料传送力时,很可能在传送方向上推动转印材料。在这种情况下,如果转印材料比较有弹性,如厚纸张,则会在转印材料的尾端出现图像模糊。
另一方面,还存在当通过转印带施加的转印材料传送力大于通过片材进给及传送辊对施加的转印材料传送力时在转印材料的前端出现图像模糊或颜色移位的问题。
发明内容
本发明提供了一种图像形成装置,其可以降低由该装置中升高的温度导致的颜色移位和图像模糊,形成高质量的图像,而不会导致该装置的成本和尺寸的增加。
在本发明的一个方面中,提供了一种图像形成装置,包括:带、适于读取该带的表面图案的读取单元、和适于基于由读取单元读取的带的表面图案来控制带在垂直于带的运动方向的横向方向上的运动的控制器。
根据本发明,可以减少由于装置中的温度升高而导致的颜色移位和图像模糊,而不会导致装置的成本和尺寸的增加。因此,可以形成高质量的图像。
通过下面结合附图进行的详细描述,本发明的上述和其它目的、特征和优点将会更加明显。
附图说明
图1是示出根据本发明第一实施例的图像形成装置的主要部分的截面视图。
图2是示出用于图1的图像形成装置中的外侧辊的对齐调整机构的透视图。
图3是示出图1的图像形成装置的内部电配置的电路框图。
图4是示出图1的图像形成装置的直流马达单元的结构的框图。
图5是示意性地示出图1的图像形成装置的图像传感器单元的结构的框图。
图6是示出由图5的图像传感器单元产生的中间转印带的表面图像的例子的图。
图7是示意性地示出图5的图像传感器单元的结构的电路框图。
图8是用于说明图5的图像传感器单元的电路操作的图。
图9是示意性地示出图1的图像形成装置的DSP的结构的框图。
图10是用于说明利用图7的图像传感器单元检测中间转印带的表面图像的方法的图。
图11A至11I示出由图5的图像传感器单元产生的中间转印带的表面图像的例子和由图9的DSP产生的移位表面图像的例子。
图12A至12I示出由图5的图像传感器单元产生的中间转印带的表面图像的例子和由图9的DSP产生的移位表面图像的例子。
图13A至图13I示出由图5的图像传感器单元产生的中间转印带的表面图像的例子和由图9的DSP产生的移位表面图像的例子。
图14是由图9的DSP执行的马达速度控制过程的流程图。
图15是在图14的马达速度控制过程中执行的马达速度控制过程的流程图。
图16是在图14的马达速度控制过程中执行的马达伺服控制过程的流程图。
图17是由图9的DSP执行的中间转印带移位控制过程的流程图。
图18是在图17的移位控制过程中执行的移位量检测过程的流程图。
图19是示意性地示出根据本发明第二实施例的图像形成装置的主要部分的截面视图。
图20A和20B示出作为对图5中示出的CMOS传感器读取的中间转印带的表面图像进行二值化的结果而获得的各表面图像。
图21A和21B是分别示出基于图20A和20B中的二值化图像的质心计算结果的图。
图22由图9的DSP执行的马达速度控制过程的流程图。
图23是在图22的马达速度控制过程中的速度检测过程的流程图。
图24示出传统的级联式图像形成装置的例子。
具体实施方式
下面参照示出本发明优选实施例的附图详细描述本发明。
首先对根据本发明第一实施例的图像形成装置进行描述。
图1是示出根据第一实施例的图像形成装置的主要部分的截面视图。如图1所示,根据第一实施例的图像形成装置1是包括并排布置的多个图像形成部分的彩色图像形成装置。
图像形成装置1是电子照相类型的,并包括光学系统1R和图像输出部分1P。光学系统1R读取原件上的图像,图像输出部分1P基于通过光学系统1R读取的图像信息在转印材料P上形成图像。图像输出部分1P主要包括图像形成部分10、片材进给单元20、中间转印单元30、定影单元40和包括控制板70的控制器。在图像形成部分10中,并排布置由四个结构相同的站(station)。
下面对上述单元进行详细描述。在图像形成部分10中,作为被沿着图1的箭头指示的方向旋转驱动的图像承载部件的感光鼓11a、11b、11c、11d在其中心被可转动地支撑。而且,在图像形成部分10中,沿感光鼓11a至11d的旋转方向面对感光鼓11a至11d的外圆周表面布置了初级静电充电器12(12a、12b、12c、12d)、光学系统13(13a、13b、13c、13d)和显影装置14(14a、14b、14c、14d)。
如下所述,图像形成部分10还具有分别旋转地驱动感光鼓11a、11b、11c、11d的Y鼓驱动马达52、M鼓驱动马达53、C鼓驱动马达54和Bk鼓驱动马达55。此外,如下所述,图像形成部分10还具有用光线分别扫描感光鼓11a、11b、11c、11d的Y扫描仪马达单元63、M扫描仪马达单元64、C扫描仪马达单元65、Bk扫描仪马达单元66。
在图像形成部分10中,初级静电充电器12a至12d均匀地对各感光鼓11a至11d的表面充电。然后,光学系统13a至13d使用扫描仪马达单元63、64、65、66对感光鼓11a至11d照射光线,如基于记录图像信号调制的激光束,由此在各感光鼓11a至11d上形成静电潜像。然后,存储四种颜色即黄色、品红、青色和黑色的显影剂(调色剂)的显影装置14a至14d将各静电潜像可视化为调色剂图像。应当注意,在初级转印区Ta、Tb、Tc、Td的下游可视化后的调色剂图像转印到作为带部件的中间转印带31的位置上,留在感光鼓11a至11d上没有转印到转印材料P上的残留调色剂被清洁装置15(15a、15b、15c、15d)刮掉,以清洁感光鼓11a至11d的表面。通过上述过程,利用各颜色的调色剂依次形成图像。
如图1所示,片材进给单元20包括用于存储转印材料P的片材盒21(21a和21b)、手动进给盘27和用于从片材盒21a或21b或手动进给盘27中一张接一张地进给转印材料P的拾取辊22a、22b和26。片材进给单元20还包括:用于与由图像形成部分10形成图像的定时同步地向次级转印区Te进给转印材料P的阻挡辊(resist roller)25a;以及用于将从拾取辊22a、22b、26进给的转印材料P传送到阻挡辊25a和25b的进给辊对23和进给导引件24。
片材进给单元20还包括具有片材进给马达的片材进给马达单元62,该片材进给马达分别旋转地驱动拾取辊22a、22b、26、进给辊对23和阻挡辊25a和25b,下面将会描述。
中间转印单元30具有作为中间转印部件的中间转印带31。中间转印带31张紧地卷绕在向中间转印带31输送驱动力的转印带驱动辊(下游辊)32、利用弹簧(弹性部件)产生的推力向中间转印带31施加适当的张力的张紧辊(上游辊)33(未示出)、在其间插有中间转印带31的情况下与次级转印区Te相对设置的次级转印内侧辊34、以及外侧辊80上。外侧辊80设置在中间转印带31的外侧,并且在传送转印材料P的方向上(通过箭头B表示的方向)位于次级转印区Te和初级转印区Td之间。应当注意中间转印带31的材料的例子包括PET(聚对苯二甲酸乙二醇酯)和PVdF(聚偏氟乙烯)。
如图1所示,初级转印平面A形成在中间转印带31的上表面上,位于转印带驱动辊32和张紧辊33之间的区域中。转印带驱动辊32是表面涂有几毫米厚的橡胶(聚氨酯(urethane)或氯丁二烯)的金属辊,从而防止转印带驱动辊32和中间转印带31之间的滑动。
在其中感光鼓11a至11d和中间转印带31相对设置的初级转印区Ta至Td中,初级转印装置35a、35b、35c、35d设置在各感光鼓11a至11d对面,而中间转印带31插在它们之间。而且,次级转印装置36设置在次级转印内侧辊34对面,其中中间转印带31插在它们之间以形成次级转印区Te。
用于清洁有图像形成在上面的中间转印带31的表面的清洁装置50设置在中间转印带31的次级转印区Te的下游位置上。清洁装置50包括清洁器刀片51和用于收纳废调色剂的废调色剂盒52a。应当注意,清洁器刀片51的材料的例子包括聚氨酯橡胶。
如下所述,中间转印单元30还包括:转印带驱动马达56,它是旋转地驱动转印带驱动辊32的转印承载部件驱动马达;以及向初级转印装置35a至35d和次级转印装置36施加高电压的高压单元59。
如图1所示,定影单元40包括其中并入了诸如卤素加热器的热源的定影辊41a、通过压力压在定影辊41a上的加压辊41b、用于将转印材料P引导至位于定影辊41a和加压辊41b之间的压合部分的导引件43、用于将从定影辊41a和加压辊41b排出的转印材料P引导到图像形成装置1的外部的内片材排出辊对44和外片材排出辊对45。加压辊41b可以具有热源。定影单元40还包括旋转地驱动定影辊41a的定影辊驱动马达57,下面将要描述。
上述控制器包括用于控制上述单元的机构的操作的控制板、马达驱动板等等。
而且,在图像形成装置1中,中间转印单元30包括下面将描述的针对外侧辊80的对齐调整机构和图像传感器单元60,图像传感器单元60是读取中间转印带31的表面图案以便通过控制转印带驱动辊32的旋转速度而控制中间转印带31的运动速度的读取单元。如图1所示,图像传感器单元60设置在感光鼓11a和中间转印带31的附近。图像传感器单元60将光照射在中间转印带31的表面上,聚集来自中间转印带31的表面的反射光以形成图像,并向中间转印带31的指定区域中输出表示表面图案的表面图像。
下面将描述如上所述构造的图像形成装置1的基本操作。
当响应用户的预定操作而发出图像形成操作启动信号时,首先由拾取辊22a从片材盒21a中逐张地进给转印材料P。然后将每个转印材料P通过进给辊对23在进给导引件24上传送到阻挡辊25a和25b。当转印材料P到达阻挡辊25a和25b时,该阻挡辊25a和25b搁置不动,从而使转印材料P的前端紧靠着压合部分。此后,阻挡辊25a和25b与图像形成部分10开始形成图像的定时同步地开始旋转。设置阻挡辊25a和25b开始旋转的定时,使得转印材料P和由图像形成部分10初级转印到中间转印带31上的调色剂图像可以同时传送到次级转印区Te中。
另一方面,在图像形成部分10中,在设置在中间转印带31的旋转方向上最上游侧的感光鼓11d上形成的调色剂图像在初级转印区Td中通过初级转印装置35d初级转印到中间转印带31上,其中在该初级转印装置35d上施加了高电压。然后将初级转印到中间转印带31上的调色剂图像传送到下一个初级转印区Tc,通过初级转印装置35c将形成在感光鼓11c上的调色剂图像转印到已初级转印到中间转印带31上的调色剂图像上。在初级转印区Tc中,在与在初级转印区Td中转印调色剂图像和将该调色剂图像传送到初级转印区Tc之间的时间对应的时间延迟之后执行调色剂图像的转印。因此,以先前转印的调色剂图像和下一个调色剂图像处于对准状态的方式将下一个调色剂图像转印到先前转印的调色剂图像上。在初级转印区Tb和Ta中以及在初级转印区Td和Tc中重复执行相同的处理,结果将四种颜色的调色剂图像初级转印到中间转印带31上。
此后,当转印材料P进入次级转印区Te并与中间转印带31接触时,与转印材料P通过次级转印辊36的定时同步地向次级转印辊36施加高电压。结果是将通过上述过程形成在中间转印带31上的四种颜色的调色剂图像全部转印到转印材料P的表面上。然后通过传送导引件43将上面已经转印了调色剂图像的转印材料P精确地引导至定影单元40的定影辊41a与加压辊41b之间的压合部分。然后通过定影单元40的辊41a和41b产生的热量和来自压合部分的压力将调色剂图像定影到转印材料P的表面上。然后通过内部排出辊对44和外部排出辊对45传送调色剂图像已定影到其上的转印材料P,并将其从图像形成装置1中排出。
而且,图像形成装置1可以对中间转印单元30的外侧辊80进行对齐。具体地说,外侧辊80具有图1中的通过承载体(bearing)(未示出)转动地支撑的后端部分和图1中的前端部分,该前端部分被图2中的对齐调整机构使得在图1的箭头C指示的方向上运动,下面将对此进行描述。也就是说,外侧辊80配置为通过对齐调整机构对齐,并且通过对齐调整机构的操作对外侧辊80进行对齐。
图2是示出外侧辊80的对齐调整机构的透视图。
如图2所示,对齐调整机构包括外侧辊80、操纵(steering)马达81、承载体82和拉长承载体83。
在外侧辊80的前部中的轴末端部分80a通过固定在侧板(未示出)上的拉长承载体83转动地支撑,使得该轴末端部分可以旋转。在拉长承载体83中,拉长孔83a支撑轴末端部分80a,使得轴末端部分80a可以在通过箭头R1和R2指示的两个方向上运动(通过图1的箭头C指示的方向)并且旋转。应当注意,在拉长承载体83前面的位置上,承载体82与轴末端部分80a啮合。操纵马达81固定在上述未示出的侧板上。具有导线的输出轴81a安装在操纵马达81的一端上,而输出轴81a的一端与承载体82接触。未示出的弹簧部件设置在承载体82的另一侧,用于通过在箭头R1指示的方向上推动承载体82而将该承载体压在输出轴81a上。
在上述对齐调整机构中,当操纵马达81在箭头M1指示的方向上扭转预定步进数量(number of step)时,输出轴81a在箭头L1指示的方向上运动预定量,承载体82在箭头L1指示的方向上运动预定量。另一方面,当操纵马达81在箭头M2指示的方向上扭转预定步进数量时,输出轴81a在箭头L2指示的方向上运动预定量,承载体82在箭头L2指示的方向上运动预定量。通过以这种方式旋转操纵马达81,外侧辊80的前部中的轴末端部分80a可以在箭头R1或R2指示的方向上运动。由此,可以将外侧辊80对齐。
通过利用上述对齐调整机构将外侧辊80对齐,可以控制中间转印带31移动的方向。当外侧辊80的前部中的轴末端部分80a在箭头R1指示的方向上运动时,在中间转印带31上施加使中间转印带31在箭头S2指示的方向上移动的力。另一方面,当外侧辊80的前部中的轴末端部分80a在箭头R2指示的方向上运动时,在中间转印带31上施加使中间转印带31在箭头S1指示的方向上移动的力。通过使用上述特征将外侧辊80对齐,在中间转印带31上,在使得抵消例如通过该装置的主体变形而施加在中间转印带31上的移动力的方向上主动施加移动力,从而中间转印带31可以在不会偏离预定位置的情况下运动。
下面描述图像形成装置1的电配置。图3是示出图像形成装置1的内部电配置的电路图。
如图3所示,图像形成装置1包括DSP(数字信号处理器)50、CPU 51、控制片材进给马达单元62的片材进给马达驱动器61、控制操纵马达81的操纵马达驱动器67。
DSP 50与驱动各种颜色的感光鼓11a、11b、11c、11d的用于各种颜色的鼓驱动马达52、53、54、55、旋动地驱动转印带驱动辊32的转印带驱动马达56、旋转地驱动定影辊41a的定影辊驱动马达57、图像传感器单元60、片材进给马达驱动器61和操纵马达驱动器67连接。CPU 51与利用光线扫描感光鼓11a、11b、11c、11d的用于各种颜色的扫描仪马达单元63、64、65、66、定影单元40以及向初级转印装置35a、35b、35c、35d和次级转印装置36施加高电压的高压单元59连接。
通过DSP 50控制鼓驱动马达52至55、转印带驱动马达56、定影辊驱动马达57、图像传感器单元60、片材进给马达驱动器61、和操纵马达驱动器67。扫描单元63至66、高压单元59和定影单元40由CPU 51控制。
下面参照图4,将对由DSP 50控制的鼓驱动马达52至55和转印带驱动马达56的结构进行简要描述。鼓驱动马达52至55和转印带驱动马达56通过其中并入了图4所示三相直流马达404的直流马达单元401来实施。
如图4所示,直流马达单元401具有控制IC 402和驱动器403以及三相直流马达404。控制IC 402具有预驱动器405和逻辑电路406。直流马达单元401与控制IC 402连接,并包括三个霍耳传感器407、408、409和速度检测MR传感器410,它们设置在三相直流马达404附近。
DSP 50根据来自速度检测MR传感器410的速度检测信号413计算马达旋转速度,并控制PWM信号412使得三相直流马达404的旋转速度(RPM)可以为目标速度。控制IC 402基于来自霍耳传感器407至409的检测信号改变要提供给线圈的电流,使得该电流可以以期望的方向通过线圈。从控制IC 402输出的电流由驱动器403基于PWM信号412放大,放大的电流提供给三相直流马达404的每个线圈。应当注意在图4中,附图标记411表示作为用于启动三相直流马达404的命令的马达启动信号。
下面参照图5对图像传感器单元60的结构进行描述。图5是示意性地示出图像传感器单元60的结构的框图。
如图1和5所示,图像传感器单元60与图像形成部分10中的中间转印带31相对设置,并包括作为发光部件的LED 601、作为光电转换元件的CMOS传感器602、透镜603和图像形成透镜604。从LED601发射的光在倾斜的方向上通过透镜603照射到中间转印带31的表面上或转印材料P的表面上。从照射到中间转印带31或转印材料P上的光反射的光通过图像形成透镜604被聚集从而在CMOS传感器602上形成图像。以这种方式,图像传感器单元60读取中间转印带31的表面图案或转印材料P的表面图像,以建立对应的图像数据。尽管在本实施例中,使用LED作为照明部件,但是照明部件不必是LED,而可以是任何光源如激光光源。
下面参照图6描述由图像传感器单元60产生的表面图像。图6是示出由图像传感器单元60产生的中间转印带31的表面图像例子的视图。如图6所示,利用图像传感器单元60,表示中间转印带31的表面图案的表面图像可以由图像形成透镜604放大成放大图像71。在图6中,附图标记72表示通过由CMOS传感器602检测放大图像71的一部分的色调而获得的图像。
中间转印带31的表面具有由瑕疵、污点等形成的不平(asperity)。由于以倾斜方向照射到该不平上的光使得在该不平之后产生阴影,因此通过将光以倾斜方向照射到中间转印带31的表面上容易检测表面图案。
而且,通过预先在中间转印带31的表面层上形成处于不影响用于图像形成的转印控制的范围内的不平,可进一步给出由CMOS传感器602读取的中间转印带31上的表面图案的特征。
此外,如果中间转印带31的表面层由透明材料制成,则通过预先在中间转印带31的中间层上形成不平或任意图案,可以由CMOS传感器602检测具有进一步的特征的表面图案而不会影响转印。
图6所示的图像72代表在利用具有24×16个像素的CMOS传感器602读取中间转印带31的表面图案的情况下产生的表面图像例子,其中每个像素具有8位的分辨率。应当注意,作为图像传感器单元60的光电转换元件,可以使用CCD传感器来代替CMOS传感器602。
下面参照图7描述图像传感器单元60的电路结构。图7是示意性地示出图像传感器单元60的结构的电路图。
如图7所示,图像传感器单元60包括具有24×16个像素的CMOS传感器602、控制电路611、A/D转换器(A/D转换电路)612、滤波器电路613、输出电路614和PLL电路615。
参照图8描述具有图7所示电路结构的图像传感器单元60的电路操作。图8是用于说明图像传感器单元60的电路操作的图。
DSP 50通过串行通信向控制电路(控制逻辑)611发送/CS信号S1、CLOCK(时钟)信号S2、DATA(数据)信号S3,并设置控制参数如控制电路611的滤波器电路613的滤波器常数。
通过发送图8所示的低电平/CS信号S1,DSP 50将操作模式切换到控制参数传输模式,并发送8位命令信号作为DATA信号S3。为了响应该命令信号,控制电路611控制滤波器电路613以确定CMOS传感器602的输出增益。
设置CMOS传感器602的输出增益的目的是为了图像传感器单元60不断地产生最佳表面图像,因为通过调整增益,例如中间转印带31的反射率根据其材料而改变。
DSP 50输出用于将由CMOS传感器602读取的中间转印带31的表面图案的增益调整为能实现下面描述的以高精度进行图像比较过程的电平。例如,DSP 50将CMOS传感器602的输出增益调整到在表示所读取的表面图案的图像中形成特定对比度的电平。
然后如图8所示,DSP 50发送高电平/CS信号S1,以将操作模式切换到从CMOS传感器602传输图像数据的图像数据传输模式。CLOCK信号S2触发输出电路(输出逻辑)614,使其向DSP 50逐个像素地传输由CMOS传感器602的输出通过A/D转换器612和滤波器电路613转换而来的数字图像信息。此时,PLL电路615基于该CLOCK信号S2产生发送同步时钟TXC S4。按照上述方式,图像传感器单元60依次产生24×16个像素数据(PIXEL(像素)0,1,...,8),而DSP 50依次接收该24×16个像素数据(PIXEL 0,1,...)。
下面参照图9简要描述DSP 50的结构。图9是示意性示出DSP 50的结构的框图。
如图9所示,DSP 50包括采样控制部分501、图像缓冲器502、图像存储器503、图像比较处理部分504、速度计算处理部分505、马达速度控制部分506、I/O控制部分507和照明控制部分508。
在DSP 50中,采样控制部分501作为采样单元工作,其以预定采样周期的间隔对从CMOS传感器602读取的表示中间转印带31的表面图案的表面图像进行采样。图像缓冲器502和图像存储器503是存储装置。该图像比较处理部分504在下面描述的马达速度控制过程和移位控制过程中执行图像比较过程。速度计算处理部分505在下面将要描述的马达速度控制过程和移位控制过程中执行各种计算。速度计算处理部分505还具有滤波处理部分505a,用于执行从检测数据中去除噪声和其它的滤波处理。
在下面将描述的马达速度控制过程中,马达速度控制部分506控制转印带驱动马达56,使得中间转印带31的运行速度可以是目标运行速度。在下面将描述的移位控制过程中,马达速度控制部分506驱动对齐调整机构的操纵马达81,使得中间转印带31的移位量可处于预定范围内。
I/O控制部分507是用于向图像传感器单元60发送并从其中接收诸如图8所示信号的数据的输入/输出部分。照明控制部件(逻辑)508是控制来自图像传感器单元601的LED 601的照明光量的照明光量控制部分。
在DSP 50中,采用控制部分501、图像存储器503、速度计算处理部分505、滤波处理部分505a、马达速度控制部分506和照明控制部分508配置为可编程。
下面描述DSP 50的操作。
DSP 50执行下面描述的马达速度控制过程和移位控制过程。在马达速度控制过程中,DSP 50对以预定采样周期的间隔采样的中间转印带31的表面图像执行图像比较过程,以计算该中间转印带31的相对运动量,而且基于该计算结果控制转印带驱动马达56的旋转速度,使得中间转印带31的运行速度可以等于预定的目标运行速度。在移位控制过程中,DSP 50基于计算的相对运动量控制图2的对齐调整机构的操纵马达81的操作,以将外侧辊80对齐,使得中间转印带31的移位量可以在预定的范围内。应当注意,相对运动量表示采样周期之间的移位量。目标运行速度表示预先设置在图像形成装置1中的中间转印带31的运行速度,例如是中间转印带31的初始运行速度。上述预定范围的移位量是在图像形成时不会出现问题的范围内的中间转印带31的移位量。例如,预先通过实验设置移位量的预定范围。
首先参照图10至图13,描述如何计算中间转印带31的相对运动量。
在本实施例中,CMOS传感器602读取中间转印带31的表面图案,以检测如图10所示的24×16个像素的表面图像72。然后如图10所示,采样控制部分501以上述采样周期的间隔对检测的表面图像72中的预定区域(如8×8个像素的表面图像73)进行采样。然后采样控制部分501通过在x方向和垂直于x方向的y方向(下面也称为“移位方向”)上逐个像素地移位采样后的表面图像73来产生移位的表面图像,其中转印材料P在x方向上传送到中间转印带31上。然后在下一个采样周期中,执行图像比较处理以计算相对运动量,在该图像比较处理中,对由采样控制部分501采样的来自CMOS传感器602的表面图像(参见表面图像73)和以上述方式产生的移位表面图像进行相互比较。具体地说,按照下面描述的方式计算中间转印带31的相对运动。
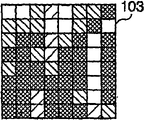
如图11A所示,CMOS传感器602读取中间转印带31的表面图案,以检测表示所读取的表面图案的24×16个像素的表面图像(例如表面图像72)。然后如上面参照图10描述的,采样控制部分501以预定的采样周期对来自所产生的表面图像72的8×8个像素的表面图像(表面图像73)进行采样,将其捕捉到图像缓冲器502中,并将其作为参考图像存储到图像存储器503中。此时,采样控制部分501通过在作为中间转印带31的传送方向的x方向上逐个像素地移位所采样的参考图像73来产生移位的表面图像(表面图像101至108),并将移位的表面图像存储在图像存储器503中(参见图11B至11I)。也就是说,移位的表面图像101至108是表示在中间转印带31的传送方向上逐个像素地从中间转印带31的表面上对应于表面图像73的位置移位后的位置处的表面图案的图像。例如,移位的表面图像101是表示在传送方向上移位一个像素后的位置处的表面图案的图像,移位的表面图像108是表示在传送方向上移位八个像素后的位置处的表面图案的图像。
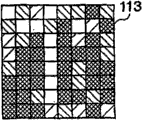
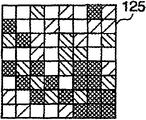
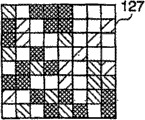
如图12A至12I和13A至13I所示,采样控制部分501还通过在x方向和垂直于传送方向(x方向)的y方向上都逐个像素地移位采样的参考图像73来产生移位的表面图像111至118和121至128,并将产生的移位表面图像存储在图像存储器503中。也就是说,移位的表面图像111至118是表示在x方向和+y方向(朝着前方)上都逐个像素地从中间转印带31的表面上对应于表面图像73的位置移位后的位置处的表面图案的图像。同样,移位的表面图像121至128是表示在x方向和-y方向(朝着后方)上都逐个像素地从中间转印带31的表面上对应于表面图像73的位置移位后的位置处的表面图案的图像。例如,移位的表面图像111是表示在传送方向上移位一个像素并在移位方向上朝着前方移动一个像素后的位置处的表面图案的图像,移位的表面图像118是表示在传送方向上移位八个像素并在移位方向上朝着前方移位八个像素后的位置处的表面图案的图像,移位的表面图像121是表示在传送方向上移位一个像素并在移位方向上朝着后方移位一个像素后的位置处的表面图案的图像,移位的表面图像128是表示在传送方向上移位八个像素并在移位方向上朝着尾方移位八个像素后的位置处的表面图案的图像。
上述产生移位的表面图像是为了通过在两个方向、即中间转印带31的传送方向和移位方向上产生逐个像素地移位的图像来检测在这两个方向、即传送方向和移位方向上的相对运动量。应当注意,中间转印带31可以朝着图像形成装置1的前方或后方运动,因此通过在+y方向上朝着前方和在-y方向上朝着后方移位而产生移位的表面图像。具体地说,产生如图12B所示的在x方向和+y方向上都逐个像素地移位的移位表面图像111至118和如图13B至13I所示的在x方向和-y方向上都逐个像素地移位的移位表面图像121至128。
然后,图像比较处理部分504执行图像比较过程。具体地说,将由采样控制部分501新采样的来自CMOS传感器602的表面图像与参考图像(表面图像73)和存储在图像存储器503中的移位表面图像(移位图像101至108、111至118、121至128)进行比较,以查找与该新采样的表面图像匹配的图像。在图像比较过程中,如果某个图像与采样的表面图像不完全匹配,但以不小于预定百分比的程度与该采样的表面图像部分匹配,则可以确定它们彼此匹配。然后推导出与该采样的表面图像匹配的图像从参考图像73移位了多少个像素。因此,所产生的移位表面图像与表示其在x和y方向上从参考图像中移位了多少个像素的信息(下面称为“移位像素数量”)一起存储在图像存储器503中。
接着,速度计算处理部分505基于图像比较过程的结果执行计算过程。在该计算过程中,假定采样图像与在x方向上从参考图像移位了5个像素的图像匹配(参见图11F),如果一个像素的尺寸是10μm,则通过计算确定中间转印带31运动了50μm。而且,假定采样周期是1kHz,则通过计算确定相对于前一次采样时中间转印带31的运行速度的相对速度是0.05×1kHz=50mm/sec。
类似地,对于y方向,假定采样图像与在垂直于传送方向的+y方向上从参考图像移位了5个像素的图像匹配(参见图12F),如果一个像素的尺寸是10μm,则通过计算确定中间转印带31朝着前方运动了50μm。同样,假定采样图像与在-y方向上从参考图像移位了5个像素的图像匹配(参见图12F),如果一个像素的尺寸是10μm,则通过计算确定中间转印带31朝着后方运动了50μm。移位量可以根据这样计算的运动量来计算。
具体地说,在本实施例中,在DSP 50中,采样控制部分501以预定采样周期的间隔对从CMOS传感器602读取的中间转印带31的表面图像进行采样。然后,采样控制部分501将所采样的表面图像捕捉到内部缓冲器502中,并将其作为参考图像存储到图像存储器503中。接着,图像比较处理部分504读取所采样的表面图像、在前一个采样周期中预先采样的参考图像以及基于来自图像存储器503的参考图像产生的移位的表面图像,并在图像比较过程中依次执行比较操作。然后,速度计算处理部分505根据该图像比较结果检测在中间转印带31的传送方向和移位方向上的图像移位量,并通过推导出在上一个采样周期中采样的参考图像在下一次采样时在传送方向和移位方向上移位了多少个像素,来计算相对运动量。然后,速度计算处理部分505根据所计算的相对运动量和采样周期来计算中间转印带31的相对速度和中间转印带31在移位方向上的移位量。
然后,基于该计算结果,马达速度控制部分506计算要将马达控制到的速度,并在下面要描述的马达速度控制过程中执行伺服控制。此外,在移位控制过程中,马达速度控制部分506发送在数量上与对应于中间转印带31的移位量的步进数量对应的驱动脉冲,以旋转操纵马达81,由此将中间转印带31在移位方向上的位置控制在预定范围内。
应当注意,通过上述计算过程推导出的中间转印带31的相对速度和移位量包括检测噪声和/或计算误差,因此要通过滤波处理部分505a进行滤波,从而可以导出适合于伺服控制马达的速度和适合于控制步进马达的驱动脉冲。例如,如果中间转印带31的相对速度由于检测噪声而是急剧变化的值,则要将伺服马达控制到的速度急剧变化,从而可能导致图像恶化。此外,在移位控制过程中,如果中间转印带31的移位量是急剧改变的值,则用于驱动步进马达的驱动脉冲的数量可能急剧变化,从而可能导致失去与马达的同步。
为了避免这些问题,滤波处理部分505a对如上所述检测的相对速度进行滤波,马达速度控制部分506计算要将伺服马达控制到的速度。类似地,在移位控制过程中,在滤波处理部分505a对移位量进行了滤波之后,马达速度控制部分506发送在数量上与对应于移位量的步进数量对应的驱动脉冲,由此以最佳方式控制步进马达。
下面参照图14描述由DSP 50针对中间转印带31执行的马达速度控制过程。图14是由DSP 50执行的马达速度控制过程的流程图。在马达速度控制过程中,执行速度检测过程和马达伺服控制过程。
当马达速度控制过程开始时,首先DSP 50使LED 601发光,并将LED光照射到中间转印带31的表面上(步骤S131)。接着,DSP50执行下面将参照图15描述的速度检测过程(步骤S132)。在执行了速度检测过程之后,DSP 50关闭LED 601(步骤S133),并设置转印带驱动马达56的目标速度(步骤S134)。在步骤S134中,根据在速度检测过程中计算的中间转印带31的平均相对速度,将转印带驱动马达56的目标速度设置为使得中间转印带31的运行速度可以等于目标运行速度,并且保持在这一速度。在步骤S134中,由速度计算处理部分505设置转印带驱动马达56的目标速度。然后,执行下面将参照图16描述的针对转印带驱动马达56的马达伺服控制过程(步骤S135),此后该过程结束。
下面描述在图14的马达速度控制过程的步骤S132中检测转印带驱动马达56的速度的速度检测过程。图15是在马达速度控制过程的步骤S132中执行的速度检测过程的流程图。
首先,监控用于基于时钟信号S2来确定采样周期(例如1ms)的中断信号(步骤S141)。如果没有接收到该中断信号,则该过程结束。另一方面,如果接收到该中断信号,则CMOS传感器602在接收到该中断信号时读取中间转印带31的表面图案以产生表面图像(例如图10中的图像72)(步骤S142)。然后,通过A/D转换器612对步骤S142中产生的表面图像(图像数据)进行模拟数字转换,调整滤波器电路613的增益,使得可以从由CMOS传感器602检测的表面图案产生最佳的表面图像(步骤S143)。接着,滤波器电路613对模拟数字转换后的表面图像进行滤波(步骤S144)。在滤波时,将通过CMOS传感器602检测的8位256色调数据转换为16色调数据,并从检测的数据中去除诸如噪声的分量。然后,采样控制部分501对滤波后的表面图像进行采样。
接着,执行图像比较过程,其中将由采样控制部分501采样的采样图像(参见图10中的图像73)与在前一处理中预先存储在图像存储器503中的对比图像进行比较,以确定是否有任何对比图像与该采样图像匹配(步骤S145)。对比图像对应于上述参考图像73、移位的表面图像101至108、111至118、121至128(参见图11A至11I、图12A至12I、图13A至13I)。如果没有与采样图像匹配的对比图像,则该过程前进至步骤S150。另一方面,如果存在与该采样图像匹配的对比图像,则从图像存储器503中检测对比图像在x方向上的移位像素数量(步骤S146)。然后,执行计算过程,以基于上述预定采样周期和在步骤S146中检测的移位像素数量计算中间转印带31的相对速度(步骤S147)。
接着,对在预先设置的一段时间期间在步骤S147中计算的中间转印带31的相对速度求取平均值,以计算中间转印带31的平均相对速度(步骤S148)。将所计算的平均相对速度存储在图像存储器503中(步骤S149)。
接着,从在当前速度检测过程中产生的采样图像产生在下一个速度检测过程的步骤S145中使用的对比图像(步骤S150),将所产生的对比图像存储在图像存储器503中,此后该速度检测过程结束。
下面描述在图14的马达速度控制过程的步骤S135中执行的马达伺服控制过程。图16是在图14的马达速度控制过程的步骤S135中执行的马达伺服控制过程的流程图。在该马达伺服控制过程中,基于在图15的速度检测过程中计算的中间转印带31的平均相对速度将转印带驱动马达56的速度伺服控制为预定的目标速度。
该马达伺服控制过程在DSP 50向转印带驱动马达56发送了启动命令411之后(参见图3)执行。首先,设置表示NOT-READY(未准备好)状态的标志,在该状态下转印带驱动马达56的速度还没有达到目标速度(步骤S161),并监控速度脉冲(步骤S162)。步骤S162中的速度脉冲监控是通过检测图4所示的速度检测信号413的边沿来执行的。
接着,计算转印带驱动马达56的旋转速度(步骤S163)。该计算由速度计算处理部分505执行。例如,如果在转印带驱动马达56转动一圈期间输出包含30个脉冲的速度检测信号413,并且该速度检测信号413的脉冲宽度为t sec,则转印带驱动马达56的旋转速度ω可以通过等式ω=2π/30/t(rad/sec)来表示。
接着,确定在步骤S163中计算的转印带驱动马达56的旋转速度ω是否等于或大于图14的马达速度控制过程的步骤S134中设置的目标速度的50%(步骤S164)。
如果该旋转速度ω小于目标速度的50%,则将PWM的ON(开)负荷设置为80%(步骤S165),向转印带驱动马达56输出具有所设置的ON负荷的PWM脉冲(步骤S171),然后,本过程结束。
另一方面,如果旋转速度ω等于或大于目标速度的50%,则进一步确定旋转速度ω是否在目标速度上下5%的范围内(步骤S166)。如果旋转速度ω在目标速度上下5%的范围内,则设置READY(准备好)标志(步骤S167),该标志表示转印带驱动马达56的旋转速度已达到目标速度的状态,该过程前进到步骤S168。另一方面,如果旋转速度ω不在目标速度上下5%的范围内,则该过程直接前进到步骤S168。
在步骤S168中,计算转印带驱动马达56的目标速度和实际旋转速度ω之差。然后,对计算的差值进行PI计算(控制)(步骤S169),并基于该计算结果确定这样的PWM脉冲宽度,根据该PWM脉冲宽度,可以使转印带驱动马达56的目标速度和实际旋转速度ω之差为0(步骤S170),向转印带驱动马达56输出具有所计算的脉冲宽度的PWM脉冲(步骤S171),此后本过程结束。
通过在上述马达速度控制过程中的步骤序列,在图4所示直流马达单元401中根据输出的PWM脉冲控制提供给转印带驱动马达56(三相直流马达404)的功率。结果,对转印带驱动马达56进行伺服控制,使得其旋转速度可以遵循目标速度。
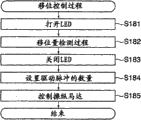
下面参照图17描述由DSP 50执行的针对中间转印带31的移位控制过程。图17是由DSP 50执行的针对中间转印带31的移位控制过程的流程图。
当移位控制过程开始时,首先DSP 50使LED 601发光,并将LED光照射到中间转印带31的表面上(步骤S181),然后,执行下面将参照图19描述的移位量检测过程(步骤S182)。
在结束移位量检测过程之后,DSP 50关闭LED 601(步骤S183),并设置用于驱动操纵马达81的脉冲数量(步骤S184)。具体地说,设置用于驱动操纵马达81的脉冲数量使得在步骤S182的移位量检测过程中计算的中间转印带31的移位量可以在上述预定范围内。然后,向操纵马达驱动器67输出在步骤S184中设置的驱动脉冲以驱动操纵马达81(步骤S185)。结果,中间转印带的移位量可以通过对齐调整结构保持在上述预定范围内。
下面描述在图17的移位控制过程的步骤S182中执行的移位量检测过程。图18是图17的移位控制过程的步骤S182中执行的移位量检测过程的流程图。
在移位量检测过程中,首先,监控用于基于时钟信号S2来确定预先设置的预定采样周期(例如1ms)的中断信号(步骤S191),如果没有接收到该中断信号,则当前过程结束。另一方面,如果接收到该中断信号,则CMOS传感器602读取中间转印带31的表面图案以产生表面图像(例如图10中的表面图像72)(步骤S192)。然后,通过A/D转换器612对步骤S192中产生的表面图像(图像数据)进行模拟数字转换,调整滤波器电路613的增益使得可以从由CMOS传感器602检测的表面图案产生最佳的表面图像(步骤S193)。接着,滤波器电路613对模拟数字转换后的表面图像进行滤波(步骤S194)。在滤波时,将通过CMOS传感器602检测的8位256色调数据转换为16色调数据,并从检测的数据中去除诸如噪声的分量。然后,采样控制部分501对滤波后的表面图像进行采样。
接着,执行图像比较过程,其中由采样控制部分501采样的采样图像(参见图10中的图像73)与在前一处理中预先存储在图像存储器503中的对比图像进行比较,以确定是否有任何对比图像与该采样图像匹配(步骤S195)。对比图像对应于上述参考图像73、移位的表面图像101至108、111至118、121至128(参见图11A至11I、图12A至12I、图13A值13I)。如果没有与采样图像匹配的对比图像,则该过程前进到步骤S200。另一方面,如果存在与该采样图像匹配的对比图像,则从图像存储器503中检测对比图像在x和y方向上的移位像素数量(步骤S196)。然后,执行计算过程,以基于上述预定采样周期和在步骤S196中检测的移位像素数量计算中间转印带31的移位量(运动量)(步骤S197)。
接着,对在预先设置的一段时间期间在步骤S197中计算的中间转印带31的移位量求取平均值,以计算中间转印带31的平均移位量(步骤S198)。将所计算的平均移位量存储在图像存储器503中(步骤S199)。
接着,从在当前移位量检测过程中产生的采样图像产生在下一个移位量检测过程的步骤S195使用的对比图像(步骤S200),所产生的对比图像存储在图像存储器503中(步骤S201),此后该速度检测过程结束。
如上所述,根据本发明第一实施例的图像形成装置1在预定采样周期中使用CMOS传感器602来检测中间转印带31的表面图案,以产生表示该表面图案的采样图像。然后,DSP 50将当前采样周期中产生的采样图像与预先基于前一采样周期中产生的采样图像产生的中间转印带31的表面图像(参考图像和移位的表面图像)进行比较,并基于该比较结果计算中间转印带31的相对速度和移位量。然后,DSP 50对中间转印带驱动马达56进行伺服控制,使得计算出的相对速度可以为0,也就是说,该中间转印带驱动马达56的旋转速度可以等于目标速度。DSP 50还驱动操纵马达81以在移位方向上调整中间转印带31的位置,使得所计算的中间转印带31的移位量可以在预定范围内。由此,即使中间转印带驱动马达56由于装置中的温度升高而膨胀,也可以通过上述伺服控制将该中间转印带驱动马达56的旋转速度控制为目标速度。由于这个原因,可以将中间转印带31的运行速度控制为固定速度(目标运行速度),从而可以减少由装置中的温度升高而导致的颜色移位和图像模糊,因此可获得高质量的图像。相应地,由于控制了中间转印带31的移位,可以进一步减小颜色移位和图像模糊,因此可以获得更高质量的图像。
应当注意,尽管在本实施例中,图像传感器单元60设置在感光鼓11a的附近,但是不用说,图像传感器单元60的位置不限于此,而是可以设置在任何位置,只要它可以获得中间转印带31的表面图像。而且,尽管在本实施例中,直流马达驱动中间转印带31,但这不是限制性的,而是示例性的,可以由步进马达驱动中间转印带31。
而且,尽管在本实施例中CMOS传感器602具有24×16个像素,但CMOS传感器602的配置不限于此。而且,尽管在本实施例中DSP50产生在每个方向上移位1至8个像素的移位表面图像101至108、111至118、121至128作为移位表面图像,但像素移位的数量不必是1至8个。
应当注意尽管在上述马达速度控制过程中,基于在速度检测过程中计算的平均相对速度计算转印带驱动马达56的目标速度和旋转速度,但可以基于在速度检测过程中计算的相对速度来计算转印带驱动马达56的目标速度和旋转速度。类似地,在移位控制过程中,可以基于在移位量检测过程中计算的移位量来计算向操纵马达81输出的PWM脉冲信号。这可以简化速度检测过程和移位量检测过程。
下面描述根据本发明第二实施例的图像形成装置。根据第二实施例的图像形成装置没有中间转印部件。在下面的描述中,那些与上述根据第一实施例的图像形成装置1对应的部件用相同的附图标记表示,并因此省略其描述。下面只描述不同之处。
图19是示意性示出根据本实施例的图像形成装置200的主要部分的结构的截面视图。图像形成装置200包括转印带205作为承载和传送转印材料P的转印材料承载带。分别用于黄色(Y)、品红(M)、青色(C)和黑色(Bk)的处理盒(下面简称为“盒”)214、215、216、217以级联方式沿着转印带205的转印材料承载表面布置。在各盒214至217上方,与各盒214至217关联地布置扫描仪单元218、219、220、221。此外,在盒214至217下方,设置与各盒214至217中的各感光鼓206、207、208、209关联的转印辊210、211、212、213,其中在感光鼓206、207、208、209和转印辊210、211、212、213之间插入了转印带205。盒214至217分别具有静电充电辊214a、215a、216a、217a;显影装置214b、215b、216b、217b和清洁器214c、215c、216c、217c,它们布置在感光鼓206至209周围。
转印带205卷绕在转印带驱动辊227和从动辊228上,并在图19的箭头指示的方向上随着转印带驱动辊227的旋转而运动。
利用上述配置,通过公知的电子照相过程获得的黄色、品红、青色和黑色调色剂图像以重叠方式转印到从片材盒202通过拾取辊203和片材进给及传送辊对229进给转印带205的转印材料P上。转印到转印材料P上的调色剂图像由定影装置222定影,并通过排出片材传感器224和片材路径223从该装置中排出。应当注意,定影装置222主要包括其中合并了加热器的定影辊222a和加压辊222b。
为了在转印材料P的反面上也形成调色剂图像,又将转印材料P在经过定影装置222之后通过另一个片材路径225传送到转印带205上,从而按照类似于上面的方式的方式在转印材料P的反面上形成调色剂图像。
在图像形成装置200中,作为读取单元的图像传感器单元60设置在最下游侧的用于黑色的盒217和转印带205附近,并且对着转印带205。图像传感器单元60将光照射到转印带205的表面上或转印材料P的表面上,并聚集从转印带205或转印材料P的表面反射的光从而形成图像,由此检测表示在转印带205或转印材料P的指定区域中的表面图案的表面图像。图像传感器单元60在结构上与第一实施例的图像传感器单元60相同。应当注意,图像传感器单元60设置在转印材料传送方向的下游(即设置在定影装置222一侧)的原因是转印带驱动辊227最容易受到热量的影响。也就是说,由于转印带驱动辊227的直径最可能由于装置中的热量而膨胀,因此必须尽可能快速地检测到由该膨胀导致的转印带205的圆周速度的变化。
在如上所述构造且没有中间转印部件的图像形成装置200中,像前面在第一实施例中描述的那样执行马达速度控制过程(图14至16)和移位控制过程(图17和18)。具体地说,具有CMOS传感器602并对着转印带205设置的图像传感器单元60产生转印带205的表面图像。然后,DSP 50根据所产生的表面图像来确定转印带205在传送方向上的相对速度和在垂直于传送方向的移位方向上的运动量。然后,根据所确定的转印带205在传送方向的相对速度来对转印带驱动马达进行伺服控制,使得转印带205的运行速度被持续控制在固定的目标运行速度。而且,根据所获得的转印带205的运行速度来控制对齐调整机构的操纵马达,使得将转印带205的移位控制为使转印带205的移位量可以在预定范围内。因此,在没有中间转印部件的图像形成装置200中,可以减少由装置中升高的温度导致的颜色移位和图像模糊,因此可以获得高质量的图像。
应当注意,马达速度控制过程和移位控制过程与第一实施例中的相同,因此省略其描述。
下面描述根据本发明第三实施例的图像形成装置。
根据第三实施例的图像形成装置与上述第一实施例的图像形成装置的不同之处在于马达速度控制过程和运动控制过程。具体地说,不是使用上述第一实施例中的图像的图案匹配来计算中间转印带的相对速度和移位量,而是利用质心计算方法来计算。在下面的描述中,那些与上述根据第一实施例对应的部件用相同的附图标记表示,因此省略其描述。下面只描述不同之处。
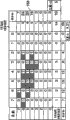
图20A和20B分别示出作为对CMOS传感器602读取的中间转印带31的表面图像进行二值化的结果而获得的各表面图像161和162。图21A和21B是示出基于图20A和20B中的各二值化图像的质心计算结果的表格163和164。
在本实施例中,DSP 50的图像比较处理部分504基于预定的阈值对表面图像73(参见图10)进行二值化,该表面图像73是CMOS传感器读取的中间转印带31的表面图像72的一部分。然后,图像比较处理部分504基于该二值化图像计算x和y方向上的质心。下面具体描述如何计算x和y方向上的质心。
例如,在x和y方向上将如表格163(图21A)所示的系数分配给二值化表面图像161(图20A)。在本实施例中,系数7、6、...、1、0根据如图21A所示的从顶行开始的顺序分配给8×8个像素的图像的各行。类似地,系数7、6、...、1、0根据从左侧开始的顺序分配给该图像的各列。接着,在表格163的行和列中给出二值化表面图像161的二值化数据。具体地说,在表格163中与二值化表面图像161中浓度(density)高于的上述阈值的像素对应的字段中给出二值化数据“1”,在表格163中与浓度低于上述阈值的像素对应的字段中给出二值化数据“0”。
然后,确定在每一行和每一列中存在多少个具有较高浓度的像素。也就是说,计算在每一行和每一列中给出的二值化数据的总和。在图21A的表格163中,例如在系数为7的列中具有较高浓度的像素个数是1;在系数为6的列中是2;在系数为3的行中是1;在系数为4的行中是4。接着,基于所计算的像素个数计算所有行和列的部分和。例如,部分和如下计算:在系数为7的列中7×1=7,因为具有高浓度的像素个数是1,在系数为6的列中6×2=12,在系数为3的行中3×1=3,在系数为4的行中4×4=16。
然后,对行和列的部分和求总和。在表格163中,行中的部分和的总和是70,列中的部分和的总和是59。然后,将这些部分和除以具有较高浓度的像素个数,从而产生质心。在表格163中,x方向的质心通过等式70÷14=5来表示,y方向的质心通过等式59÷14=4.21来表示。
此后,在下一个采样周期中,CMOS传感器602对中间转印带31的表面图像进行采样以产生表面图像,并通过按照与上述方式类似的方式执行二值化来产生二值化表面图像162(图20B)。然后,按照与上述方式类似的方式计算质心。在此例中,下一次采样的表面图像162的质心如下计算:x方向的质心是2,y方向的质心是2.21。
然后,将表格163和表格164相互比较,即在x和y方向上计算的质心相互比较,从而计算中间转印带31在x和y方向上从一个采样周期到下一个采样周期的相对运动量。作为表格163和164之间比较的结果,通过计算确定中间转印带31在x方向上运动的像素个数是3而在y方向上运动的像素个数是2。
可以从上述计算的相对运动量来计算该相对运动的距离。具体地说,假定采样图像相对于前一次采样的图像在作为传送方向的x方向上移位了三个像素,如果一个像素的尺寸是10μm,则通过计算确定中间转印带31运动了30μm。此时,假定采样周期是1kHz,通过计算确定相对速度是0.03mm×1kHz=30mm/sec。
类似地,对于方向y,假定采样图像相对于前一次采样的图像在垂直于传送方向的-y方向上移位了两个像素,如果一个像素的尺寸是10μm,则通过计算确定中间转印带在移动方向上朝着后方运动了20μm。由此,可以计算中间转印带31的移位量。
下面描述由根据本实施例的图像形成装置使用质心计算方法进行的马达速度控制过程。图22是马达速度控制过程的流程图。
当马达速度控制过程开始时,首先DSP 50使LED 601发光,并将LED光照射到中间转印带31的表面上(步骤S211)。然后,DSP50执行下面将参照图23描述的速度检测过程(步骤S212)。在执行了速度检测过程之后,DSP 50关闭LED 601(步骤S213)并设置转印带驱动马达56的目标速度(步骤S214)。在步骤S214中,根据在速度检测过程中计算的中间转印带31的平均相对速度,将转印带驱动马达56的目标速度设置为使得中间转印带31的运行速度等于该目标运行速度,并且保持在这一速度。然后,对转印带驱动马达56执行马达伺服控制过程(步骤S215)。在步骤S215中执行的马达伺服控制过程与上述第一实施例中执行的马达伺服控制过程(图16)相同,因此省略其描述。
下面描述在图22的马达速度控制过程的步骤S212中检测转印带驱动马达56的速度的速度检测过程。图23是在马达速度控制过程的步骤S212中执行的速度检测过程的流程图。
首先,监控用于基于时钟信号S2来确定采样周期(例如1ms)的中断信号(步骤S221)。如果没有接收到该中断信号,当前过程结束。另一方面,如果接收到该中断信号,则CMOS传感器602在接收到该中断信号时读取中间转印带31的表面图案以产生表面图像(例如图10中的图像72)(步骤S222)。然后,通过A/D转换器612对步骤S222中产生的表面图像进行模拟数字转换,调整滤波器电路613的增益使得可以从由CMOS传感器602检测的表面图案产生最佳的表面图像(步骤S223)。接着,滤波器电路613对模拟数字转换后的表面图像进行滤波(步骤S224)。在滤波时,将通过CMOS传感器602检测的8位256色调数据转换为16色调数据,并从检测的数据中去除诸如噪声的分量。然后,采样控制部分501对滤波后的表面图像进行采样。
接着,如上所述对通过采样控制部分501采样的采样图像(表面图像73)进行二值化,以产生二值化图像(参见图20A、20B、21A、21B)(步骤S225)。然后,采用上述质心计算方法计算所产生的二值化图像的质心(步骤S226)。将所计算的二值化图像的质心存储在图像存储器503中。从前一处理中计算的质心值和当前处理中计算的质心值之差以及采样周期推导出中间转印带31的相对速度(步骤S227)。然后,通过在预先设置的预定时间段上对中间转印带31的相对速度求取平均值,来计算中间转印带31的平均相对速度(步骤S228)。将所计算的平均相对速度存储在图像存储器503中(步骤S229),此后速度检测过程结束。
应当注意,就移位控制过程而言,也不是像在第一实施例中那样利用图像的图案匹配来计算中间转印带31的移位量,而是基于如上述马达速度控制过程的情况中的二值化数据利用质心计算方法来计算。因为这个原因,省略移位控制过程的详细描述。
如上所述,根据本发明第三实施例的图像形成装置使用CMOS传感器602以预定的采样周期检测中间转印带31的表面图案,以产生采样图像。然后,DSP 50计算该采样图像的质心,并基于所计算的质心和先前采样的表面图像的质心来计算中间转印带31的相对速度和移位量。然后,DSP 50对中间转印带驱动马达56进行伺服控制,使得计算出的相对速度可以为0,也就是说,该中间转印带驱动马达56的旋转速度可以等于目标速度。DSP 50还驱动操纵马达81以在移位方向上调整中间转印带31位置,使得所计算的中间转印带31的移位量可以在预定范围内。由此,即使中间转印带驱动马达56由于装置中的温度升高而膨胀,也可以通过上述伺服控制将该中间转印带驱动马达56的旋转速度控制为目标速度。由于这个原因,可以将中间转印带31的运行速度控制为固定速度(目标运行速度),从而可以减少由装置中的温度升高而导致的颜色移位和图像模糊,因此可获得高质量的图像。此外,由于还控制中间转印带31的移位,可以进一步减少颜色移位和图像模糊,由此可以获得更高质量的图像。
应当注意在上述第三实施例中使用质心计算方法的马达速度控制过程和移位控制过程还可以应用于根据上述第二实施例的没有中间转印部件的图像形成装置。
而且,尽管在上述第一至第三实施例中,给出中间转印带或转印材料承载带作为其移动被控制的带的例子,但其不是限制性的。例如,本发明可应用于对通过施加热量将调色剂图像定影到转印材料上的定影带的移位控制。
虽然参照示例性实施例描述了本发明,但是应当理解本发明不限于所公开的示例性实施例。所附权利要求的范围应当被赋予最宽泛的解释,从而涵盖所有变型、等同结构和功能。
Claims (15)
1.一种图像形成装置,包括:
带;
调色剂图像形成单元,适于在所述带上形成调色剂图像;
读取单元,适于以预定的定时反复读取所述带的带有不平的表面图案,所述表面图案位于所述调色剂图像形成单元不形成调色剂图像的区域上;以及
控制器,适于基于由所述读取单元以预定的定时反复读取的所述带的带有不平的表面图案来控制所述带在垂直于该带的运动方向的横向方向上的运动。
2.根据权利要求1所述的图像形成装置,还包括:
计算单元,适于基于由所述读取单元以预定的定时反复读取的所述带的带有不平的表面图案来计算所述带在垂直于运动方向的横向方向上的运动量。
3.根据权利要求2所述的图像形成装置,其中所述计算单元适于基于由所述读取单元读取的所述带的带有不平的表面图案来计算所述带在横向方向上的运动量,并计算所述带在运动方向上的速度。
4.根据权利要求3所述的图像形成装置,其中所述控制器适于根据由所述计算单元计算的所述带在运动方向上的速度来控制所述带在运动方向上的速度。
5.根据权利要求3所述的图像形成装置,还包括:
采样单元,适于以预定采样周期的间隔对由所述读取单元读取的所述带的带有不平的表面图案的图像进行采样;以及
图像存储单元,适于存储至少一个由所述采样单元采样的图像,
其中所述计算单元适于基于采样图像和存储在所述图像存储单元中的图像计算所述带在运动方向上的速度以及所述带在垂直于运动方向的横向方向上的运动量。
6.根据权利要求5所述的图像形成装置,其中所述计算单元适于通过执行相对比较操作来计算所述带在运动方向上的相对速度,在该相对比较操作中,将该采样图像和先前采样的采样图像相互进行比较。
7.根据权利要求3所述的图像形成装置,还包括:
采样单元,适于以预定采样周期的间隔对由所述读取单元读取的所述带的带有不平的表面图案进行采样,从而获得多个采样图像,并且
其中所述计算单元适于计算具有采样周期的间隔的所述带的带有不平的表面图案的所述多个采样图像的质心,并执行相对比较操作以计算所述带在运动方向上的速度和所述带在垂直于运动方向的横向方向上的运动量,在该相对比较操作中,将计算出的质心相互比较。
8.根据权利要求2所述的图像形成装置,其中所述计算单元包括:滤波操作部分,适于对由所述读取单元读取的所述带的带有不平的表面图案的图像进行滤波。
9.根据权利要求8所述的图像形成装置,其中所述计算单元适于可变地控制所述滤波操作部分的滤波器常数。
10.根据权利要求1所述的图像形成装置,其中所述读取单元包括:
照明部件,适于将光照射到所述带上;
光电转换元件,适于将来自由所述照明部件照明的所述带的光转换为电信号;以及
图像形成透镜,适于使来自所述带的光在所述光电转换元件上形成图像。
11.根据权利要求10所述的图像形成装置,其中所述照明部件包括:照明光量控制器,适于可变地控制照明光的量。
12.根据权利要求10所述的图像形成装置,其中所述读取单元包括:
作为所述光电转换元件的具有多个像素的CCD传感器和CMOS传感器之一;以及
A/D转换器,适于将来自所述CCD传感器和所述CMOS传感器之一的模拟信号转换为数字信号。
13.根据权利要求1所述的图像形成装置,其中所述带包括中间转印带,其中形成在图像承载部件上的图像被初级转印到该中间转印带上。
14.根据权利要求1所述的图像形成装置,其中所述带包括适于传送转印材料的转印材料承载带。
15.根据权利要求1所述的图像形成装置,其中所述带包括适于通过施加热量将调色剂图像定影到转印材料上的定影带。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006098770A JP5058506B2 (ja) | 2006-03-31 | 2006-03-31 | 画像形成装置 |
| JP2006098770 | 2006-03-31 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101046664A CN101046664A (zh) | 2007-10-03 |
| CN100549863C true CN100549863C (zh) | 2009-10-14 |
Family
ID=38197677
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2007100914648A Expired - Fee Related CN100549863C (zh) | 2006-03-31 | 2007-03-30 | 图像形成装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7796928B2 (zh) |
| EP (1) | EP1840665A2 (zh) |
| JP (1) | JP5058506B2 (zh) |
| KR (1) | KR100955177B1 (zh) |
| CN (1) | CN100549863C (zh) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5233027B2 (ja) * | 2006-07-31 | 2013-07-10 | オセ−テクノロジーズ・ベー・ヴエー | 像対シートの位置決めのための検出装置および方法 |
| JP4845656B2 (ja) * | 2006-09-14 | 2011-12-28 | キヤノン株式会社 | 画像形成装置 |
| JP5252995B2 (ja) | 2008-05-27 | 2013-07-31 | キヤノン株式会社 | 画像形成装置 |
| JP5536990B2 (ja) * | 2008-05-27 | 2014-07-02 | キヤノン株式会社 | 画像形成装置 |
| JP5558736B2 (ja) * | 2008-05-27 | 2014-07-23 | キヤノン株式会社 | 画像形成装置及びその制御方法 |
| JP4766140B2 (ja) * | 2009-03-27 | 2011-09-07 | 富士ゼロックス株式会社 | 片寄補正装置、中間転写装置、転写装置および画像形成装置 |
| US8351831B2 (en) * | 2009-03-27 | 2013-01-08 | Fuji Xerox Co., Ltd. | Displacement correcting device, intermediate transfer device, transfer device, and image forming apparatus |
| JP5586918B2 (ja) * | 2009-10-30 | 2014-09-10 | キヤノン株式会社 | 移動検出装置および記録装置 |
| JP5586919B2 (ja) * | 2009-10-30 | 2014-09-10 | キヤノン株式会社 | 移動検出装置および記録装置 |
| JP2011133870A (ja) * | 2009-11-27 | 2011-07-07 | Canon Inc | 画像形成装置及びその制御方法 |
| JP5506458B2 (ja) * | 2010-03-04 | 2014-05-28 | キヤノン株式会社 | 画像形成装置 |
| JP5949251B2 (ja) * | 2012-07-17 | 2016-07-06 | 株式会社リコー | 移動部材検出装置、画像形成装置 |
| JP6661311B2 (ja) | 2015-09-11 | 2020-03-11 | キヤノン株式会社 | 像加熱装置及び像加熱装置に用いるヒータ |
| CN113135021B (zh) * | 2021-04-28 | 2023-04-25 | 蓝思科技(长沙)有限公司 | 转印设备及其印刷方法 |
| CN113135029B (zh) * | 2021-04-28 | 2023-04-25 | 蓝思科技(长沙)有限公司 | 印刷设备及其印刷方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6137517A (en) * | 1999-04-14 | 2000-10-24 | Xerox Corporation | Image registration adjustment system and method for dynamically compensating for photoreceptor belt skew |
| CN1453661A (zh) * | 2002-04-26 | 2003-11-05 | 佳能株式会社 | 电子照相环形带、处理盒及电子照相装置 |
| CN1550098A (zh) * | 2001-06-27 | 2004-11-24 | 用于图像形成设备的带控制装置 | |
| CN1217525C (zh) * | 2000-12-28 | 2005-08-31 | 佳能株式会社 | 图象形成设备 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4705386A (en) * | 1986-05-12 | 1987-11-10 | Shinko Electric Co., Ltd. | Color copying machine |
| DE3834232A1 (de) * | 1987-10-09 | 1989-04-20 | Brother Ind Ltd | Vorrichtung und verfahren zur aufzeichnung eines farbbildes |
| JP2875261B2 (ja) * | 1988-08-05 | 1999-03-31 | キヤノン株式会社 | 画像形成装置 |
| DE3933196C2 (de) * | 1989-10-05 | 1994-05-26 | Schenck Ag Carl | Verfahren und Vorrichtung zur Überwachung des Bandlaufs eines Förderbandes oder einer Bandwaage |
| JPH0844134A (ja) * | 1994-07-26 | 1996-02-16 | Fuji Xerox Co Ltd | 多重画像形成装置 |
| JP2765628B2 (ja) * | 1996-03-07 | 1998-06-18 | 株式会社リコー | 画像形成装置 |
| JPH11160952A (ja) * | 1997-11-21 | 1999-06-18 | Canon Inc | 画像形成装置 |
| JP2000071522A (ja) | 1998-09-02 | 2000-03-07 | Minolta Co Ltd | 画像形成装置 |
| JP2000089529A (ja) * | 1998-09-10 | 2000-03-31 | Minolta Co Ltd | 画像形成装置 |
| JP2001039523A (ja) * | 1999-08-03 | 2001-02-13 | Nec Niigata Ltd | ベルト走行制御機構およびこのベルト走行制御機構を備えた画像形成装置 |
| EP1203269B1 (de) * | 1999-08-10 | 2007-03-21 | Océ Printing Systems GmbH | Verfahren und steuerung zur positionsregelung eines bandförmigen bildträgers in einem elektrographischen gerät |
| JP4021717B2 (ja) | 2002-06-21 | 2007-12-12 | 株式会社リコー | 画像形成装置 |
| JP2004184468A (ja) | 2002-11-29 | 2004-07-02 | Canon Inc | カラー画像形成装置 |
| JP2004280016A (ja) | 2003-03-19 | 2004-10-07 | Ricoh Co Ltd | 中間転写装置と画像形成装置と中間転写体の移動速度補正方法及び感光体回転速度補正方法 |
-
2006
- 2006-03-31 JP JP2006098770A patent/JP5058506B2/ja not_active Expired - Fee Related
-
2007
- 2007-03-27 EP EP07006273A patent/EP1840665A2/en not_active Withdrawn
- 2007-03-29 US US11/692,994 patent/US7796928B2/en not_active Expired - Fee Related
- 2007-03-30 CN CNB2007100914648A patent/CN100549863C/zh not_active Expired - Fee Related
- 2007-03-30 KR KR1020070031860A patent/KR100955177B1/ko not_active IP Right Cessation
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6137517A (en) * | 1999-04-14 | 2000-10-24 | Xerox Corporation | Image registration adjustment system and method for dynamically compensating for photoreceptor belt skew |
| CN1217525C (zh) * | 2000-12-28 | 2005-08-31 | 佳能株式会社 | 图象形成设备 |
| CN1550098A (zh) * | 2001-06-27 | 2004-11-24 | 用于图像形成设备的带控制装置 | |
| CN1453661A (zh) * | 2002-04-26 | 2003-11-05 | 佳能株式会社 | 电子照相环形带、处理盒及电子照相装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| KR20070098741A (ko) | 2007-10-05 |
| EP1840665A2 (en) | 2007-10-03 |
| JP2007272021A (ja) | 2007-10-18 |
| US7796928B2 (en) | 2010-09-14 |
| US20070231021A1 (en) | 2007-10-04 |
| JP5058506B2 (ja) | 2012-10-24 |
| KR100955177B1 (ko) | 2010-04-29 |
| CN101046664A (zh) | 2007-10-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100549863C (zh) | 图像形成装置 | |
| US6701117B2 (en) | Image forming apparatus | |
| EP1760537B1 (en) | Drive control unit, drive control method and image forming apparatus | |
| CN101846942A (zh) | 图像形成装置和图像形成方法 | |
| CN102998931B (zh) | 光源控制装置和成像装置 | |
| US6655774B2 (en) | Image forming apparatus | |
| JP4961296B2 (ja) | 画像形成装置 | |
| JP4720190B2 (ja) | 画像形成装置 | |
| CN101770201A (zh) | 定影装置、图像形成设备和定影装置控制方法 | |
| JP2004280016A (ja) | 中間転写装置と画像形成装置と中間転写体の移動速度補正方法及び感光体回転速度補正方法 | |
| US7012628B2 (en) | Image forming method | |
| US20040258437A1 (en) | Image information detection sensor | |
| JP2008052200A (ja) | 画像形成装置 | |
| JP4818022B2 (ja) | 画像形成装置及びその制御方法 | |
| JP2006201254A (ja) | 画像形成装置 | |
| JP4539322B2 (ja) | 画像形成装置および該装置における位相調整方法 | |
| JP4989201B2 (ja) | カラー画像形成装置、およびカラー画像形成装置の駆動方法 | |
| JP4956300B2 (ja) | 画像形成装置及び制御方法 | |
| KR100213116B1 (ko) | 인쇄기의 감광벨트 사행정보 검출방법 및 그 검출장치 | |
| JPH04321066A (ja) | カラー画像形成装置 | |
| JP2006227034A (ja) | ベルト移動装置および画像形成装置 | |
| US7545400B2 (en) | Image forming apparatus and method of controlling top margin of printing medium in image forming apparatus | |
| JP5053813B2 (ja) | 画像形成装置 | |
| US5708944A (en) | Image forming apparatus | |
| JPH08110347A (ja) | 感光体の回転情報検出器を備えた画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20091014 Termination date: 20180330 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |