CN100510632C - 振子、电子设备及振子的频率调整方法 - Google Patents
振子、电子设备及振子的频率调整方法 Download PDFInfo
- Publication number
- CN100510632C CN100510632C CNB2004100741819A CN200410074181A CN100510632C CN 100510632 C CN100510632 C CN 100510632C CN B2004100741819 A CNB2004100741819 A CN B2004100741819A CN 200410074181 A CN200410074181 A CN 200410074181A CN 100510632 C CN100510632 C CN 100510632C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- tablet
- crossbeam
- oscillator
- connecting portion
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C19/00—Gyroscopes; Turn-sensitive devices using vibrating masses; Turn-sensitive devices without moving masses; Measuring angular rate using gyroscopic effects
- G01C19/56—Turn-sensitive devices using vibrating masses, e.g. vibratory angular rate sensors based on Coriolis forces
Abstract
本发明提供一种可以高精度地检测振子的旋转的振子、电子设备及振子的频率调整方法。振子(10)包含:一对音片(1a、1b),其在Y方向上延伸,进行用于产生与振子(10)的旋转相对应的科里奥利力的第1振动;横梁(2),其在X方向上延伸,与一对音片(1a、1b)连接;第1检测部(6),其设置在横梁(2)上,对由科里奥利力引起的一对音片(1a、1b)的第2振动导致的横梁(2)的形状变化进行检测;基座(5),其用于支撑横梁(2);第1连接部(3),其连接横梁(2)的一端和基座(5);以及第2连接部(4),其连接横梁(2)的另一端和上述基座(5)。
Description
技术领域
本发明涉及陀螺(gyro)振子之类的振子、具备该振子的电子设备以及振子的频率调整方法。
背景技术
专利文献1:特公平7-69180号公报
专利文献2:特开平10-160479号公报
以往的振子为了检测该振子的旋转,如上述专利文献1所述,提出了如下的振子:与能产生与上述旋转相对应的振动的臂部件连接的基部,由突出设置于该基部的中央部分的支撑部件固定在基座上,并用该支撑部件检测扭转振动。
另外,关于振子的频率调整方法,如专利文献2所述,提出了如下的频率调整方法:通过在激励用振动片和检测用振动片其中之一的末端增加质量,或者除去上述所增加的质量,来改变各振动片的质量,调整激励振动频率和检测振动频率。
然而,上述振子存在如下的问题:上述臂部件的振动集中在设置于如上所述的上述基部的中央部分的1个部位的支撑部件上,容易泄漏到基座上而妨碍振动,很难高精度地检测上述振子的旋转。
另外,还存在如下的问题:由于利用位于远离振动片的位置上的支撑部件来检测角速度,所以不能高精度地检测扭转振动。
另外,在以往的频率调整方法中,即使想通过调整振动片末端的质量来将驱动振动频率和检测振动频率的频率差调整在规定的范围内,由于驱动振动频率和检测振动频率也会相互影响,而且调整范围小,有时不能充分地调整频率,使成品率下降。
发明内容
本发明就是为了解决上述课题而提出的,其目的在于提供一种能够高精度地检测振子的旋转的振子,以及提供一种具备能够高精度地检测振子的旋转的振子的电子设备。
另外,本发明的另一目的在于提供一种容易调整频率并可以提高成品率的振子的频率调整方法。
本发明的振子为了解决上述课题,其特征在于,包含:音片,其是沿着成为振子的旋转中心轴的第1方向(Y方向)延伸的棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;横梁,其与包含上述音片的假想平面(XY平面)平行,并且在与上述第1方向(Y方向)垂直的第2方向(X方向)上延伸,且与上述音片连接;第1检测部,其设置在上述横梁上,对由上述科里奥利力引起的上述音片的第2振动导致的上述横梁的形状变化进行检测;基座,其用于支撑上述横梁;第1连接部,其连接上述横梁的一端和上述基座;以及第2连接部,其连接上述横梁的另一端和上述基座。
根据本发明的振子,与上述音片连接的上述横梁,由于其一端通过上述第1连接部与上述基座连接,其另一端通过上述第2连接部与上述基座连接,所以,与不具有本发明的振子结构的以往的振子相比,可以减少由上述科里奥利力引起的上述第2振动向上述基座泄漏的情况。由此,与上述以往的振子相比,由上述第2振动引起的上述横梁的形状变化变大,可以高精度地检测上述振子的旋转。
本发明的振子为了解决上述课题,包含:一对音片,其是沿着成为振子的旋转中心轴的第1方向(Y方向)延伸的相互平行的一对棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;横梁,其与包含上述一对音片的假想平面(XY平面)平行,并且在与上述第1方向(Y方向)垂直的第2方向(X方向)上延伸,且与上述一对音片连接;第1检测部,其设置在上述横梁上,对由上述科里奥利力引起的上述一对音片的第2振动导致的上述横梁的形状变化进行检测;基座,其用于支撑上述横梁;第1连接部,其连接上述横梁的一端和上述基座;以及第2连接部,其连接上述横梁的另一端和上述基座。
即,在本发明的振子中,其特征在于,上述音片是沿着成为振子的旋转中心轴的第1方向延伸的相互平行的一对棒状音片。
根据本发明的振子,与上述一对音片连接的上述横梁,由于其一端通过上述第1连接部与上述基座连接,其另一端通过上述第2连接部与上述基座连接,所以,与不具有本发明的振子结构的以往的振子相比,可以减少由上述科里奥利力引起的上述第2振动向上述基座泄漏的情况。由此,与上述以往的振子相比,由上述第2振动引起的上述横梁的形状变化变大,可以高精度地检测上述振子的旋转。
在上述本发明的振子中,优选上述横梁的一端与上述一对音片中的一个音片连接,另一端与上述一对音片中的另一个音片连接。
在上述本发明的振子中,优选上述第1连接部连接上述横梁的上述一端与上述一个音片之间的上述连接部位和上述基座;上述第2连接部连接上述横梁的上述另一端与上述另一个音片之间的上述连接部位和上述基座。
在上述本发明的振子中,优选的是:上述横梁的一端和另一端位于上述一对音片的外侧。
在上述本发明的振子中,优选的是:将上述第1检测部设置在上述一对音片之间。
在上述本发明的振子中,优选的是:还具有:第3连接部,其连接上述横梁的大致中央部位和上述基座;第2检测部,其设置在上述横梁上,并检测上述横梁的形状变化;上述第1检测部和上述第2检测部协同进行检测,该检测用于除去在与上述假想平面(XY平面)垂直的第3方向(Z方向)上的对上述振子的旋转的干扰。
在上述本发明的振子中,优选的是:上述第1检测部设置在上述一对音片中的一个音片和上述第3连接部之间;上述第2检测部设置在上述一对音片中的另一个音片和上述第3连接部之间。
在上述本发明的振子中,优选的是:上述第1检测部设置在上述一对音片中的一个音片和上述第3连接部之间;上述第2检测部设置在上述一个音片和上述横梁的上述一端与上述另一端中距离该音片较近的一端之间。
在上述本发明的振子中,优选的是:上述一对音片中的一个音片和上述第3连接部之间的距离比上述一个音片和上述第1连接部与上述第2连接部中距离上述一个音片较近的连接部之间的距离短。
在上述本发明的振子中,优选的是:上述第1检测部设置在上述一对音片外侧的上述横梁的上述一端和上述一对音片中距离上述横梁的上述一端较近的一个音片之间。
在上述本发明的振子中,优选的是:还具有第2检测部,其设置在上述一对音片外侧的上述横梁的上述另一端和上述一对音片中的另一个音片之间,并检测上述横梁的形状变化;上述第1检测部和上述第2检测部协同进行检测,该检测用于除去在与上述假想平面(XY平面)垂直的第3方向(Z方向)上的对上述振子的旋转的干扰。
在上述本发明的振子中,优选的是:上述一对音片、上述横梁、上述第1连接部、上述第2连接部以及上述基座由石英构成。
本发明的电子设备具备上述的本发明的振子。
本发明的振子的频率调整方法中,该振子包含:音片,其是沿着成为振子的旋转中心轴的第1方向延伸的棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;横梁,其与包含上述音片的假想平面平行,并且在与上述第1方向垂直的第2方向上延伸,且与上述音片连接;基座,其用于支撑上述横梁;第1连接部,其连接上述横梁的一端和上述基座;以及第2连接部,其连接上述横梁的另一端和上述基座;该频率调整方法的特征在于,调整上述音片的至少一个端部的质量,对振子的频率进行调整。
由此,通过调整音片的端部的质量,可以调整音片的驱动振动频率,另外,通过调整音片另一端的质量,可以调整以往调整困难的驱动振动频率和检测振动频率的频率差。
另外,本发明的振子的频率调整方法的特征在于,调整从上述音片的上述横梁开始长长地延伸的第1延伸部的末端的质量,对驱动振动频率和检测振动频率进行调整;调整从上述音片的上述横梁开始短短地延伸的第2延伸部的末端的质量,对驱动振动频率和检测振动频率的差进行调整。
由此,可以用第1延伸部调整驱动振动频率和检测振动频率,用第2延伸部调整驱动振动频率和检测振动频率的差。因此,可以提供能确保良好特性的振子。
另外,本发明的振子的频率调整方法的特征在于,上述第2延伸部的末端设置有形成得比其基端大的频率调整部,调整该频率调整部的质量,对振子的频率进行调整。
这样,通过使第2延伸部的末端形成得比其基端大,质量的调整量变大,可以扩大频率的调整幅度。因此,可以充分地调整频率,并可提高振子的成品率。
附图说明
图1表示实施例1的振子的结构。
图2表示实施例1的振子的驱动模式。
图3表示实施例1的振子的检测模式。
图4表示实施例1的检测部的其它位置。
图5表示实施例2的振子的结构。
图6表示实施例3的振子的结构。
图7表示实施例3的检测部的另一个位置。
图8表示实施例4的振子的结构。
图9表示实施例4的检测部的另一个位置。
图10表示实施例4的检测部的再一个位置。
图11表示变形例的振子的结构。
图12表示其它变形例的振子的结构。
图13表示其它变形例的振子的结构。
图14表示其它变形例的振子的结构。
图15表示实施例1的被封装的振子的结构。
图16表示实施例中的应用设备的结构。
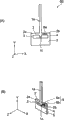
图17表示实施例5的振子的频率调整方法。
图18表示实施例5的振子的频率调整方法的频率变化。
图19表示变形例的振子的结构。
符号说明:
10:振子;1a、1b:音片;1c、1d:音片的下端;1e、1f:音片的上端;2:横梁;3:第1连接部;4:第2连接部;5:基座;6、7:检测部;8:第3连接部;20、30、40、50、60、70、80、200:振子;100:应用设备。
具体实施方式
参照附图,对本发明的振子的实施例进行说明。
[实施例1]
图1(A)和图1(B)是表示实施例1的振子的结构的正视图和斜视图。实施例1的振子10进行用于产生与以图1(A)、(B)所示的Y轴为中心轴的旋转相对应的科里奥利力的振动(以下称为“驱动用振动”)、以及由该科里奥利力引起的用于检测上述旋转的振动(以下称为“检测用振动”)。即,振子10在驱动模式时,进行上述驱动用振动,另一方面,在检测模式时,进行上述检测用驱动。振子10为了进行上述两种模式的振动,由一对音片1a、1b、横梁2、第1连接部(连接部件)3、第2连接部(连接部件)4、基座5以及检测部6构成。
一对音片1a、1b沿着Y轴延伸,且相互平行,它们是由具有规定长度的石英构成的棒状部件。
横梁2与包含一对音片1a、1b的假想平面(XY平面)平行,它是在与Y轴垂直的X轴方向上延伸的、由具有规定长度的石英构成的棒状部件。横梁2与一对音片1a、1b相交。由此,横梁2的一端2a和另一端2b位于一对音片1a、1b的外侧,另一方面,一个音片1a的下端1c和另一个音片1b的下端1d向横梁2的下方突出。
第1连接部3和第2连接部4是沿着Y轴方向延伸的、由具有规定长度的石英构成的棒状部件。第1连接部3连接横梁2的一端2a和基座5,另一方面,第2连接部4连接横梁2的另一端2b和基座5。
基座5是由具有横长的长方体形状的石英构成的部件,通过第1连接部3和第2连接部4,对保持音片1a、1b的横梁2进行支撑。
检测部6由检测电极6a、6b构成,该检测电极6a、6b分别设置在横梁2的与上述假想平面(XY平面)平行的两个面(正面和背面)的大致中央部位,在上述检测模式时,根据以往公知的压电原理,对由一对音片1a、1b的检测用振动所引起的横梁2的形状变化进行检测。
另外,一对音片1a、1b具有用于激励驱动用振动的以往公知的驱动元件(未图示)。
图15(A)是表示将振子10收纳在收纳容器中的状态的斜视图,图15(B)是该图15(A)的a-a剖面图。
由陶瓷等形成的收纳容器25被设置成一面开放的凹部。在该凹部中,通过粘合振子10的基座5与收纳容器25的载置部27,把振子10粘贴固定在收纳容器25中。另外,虽然未图示,但是,利用引线接合把形成于振子上的布线和形成于收纳容器25上的布线相连接,由此将它们电连接。而且,用盖体26来密封收纳容器25的上面,以使其内部保持真空氛围或惰性气体氛围,从而形成被封装的振子。
另外,上述的布线连接也可以不利用引线接合,而使用导电性粘合剂进行连接。
而且,也可以如下实施:不设置振子10的基座5,使第1连接部3和第2连接部4延伸,并将各自的终端部粘合在收纳容器25的载置部27上,由此,使收容容器25的载置部27发挥振子10的基座的作用。
图2(A)和图2(B)是表示实施例1的振子的驱动模式的正视图和斜视图。在驱动模式时,一对音片1a、1b由于上述驱动元件的激励,如图2(A)和(B)的箭头所示,沿着X轴方向以相互反相关系进行弯曲振动。更详细地来说,如图2(A)和(B)所示,在X轴方向上,当音片1a变形为“(”形状时,音片1b变形为“)”形状,与图2(A)、(B)的图示相反,在X轴方向上,当音片1a变形为“)”形状时,音片1b变形为“(”形状。换言之,音片1a、1b以其末端相互靠近或者远离的状态振动。
另外,音片1a的下端1c和音片1b的下端1d随着音片1a、1b的振动稍微有些振动,但该振动几乎不对音片1a、1b的振动产生影响。
图3(A)和图3(B)是表示实施例1的振子的检测模式的斜视图和侧视图。在检测模式时,换言之,一对音片1a、1b在进行驱动模式的驱动用振动的情况下,在振子10以Y轴为中心轴进行了旋转时,在一对音片1a、1b上交替地产生了实线箭头所示的科里奥利力F和虚线箭头所示的科里奥利力F。由于该科里奥利力F,一对音片1a、1b沿着与上述假想平面(XY平面)垂直的Z轴方向,以相互反相的关系进行弯曲振动。更详细地来说,如图3(A)和(B)所示,在Z轴方向上,当音片1a变形为“)”形状时,音片1b变形为“(”形状,与图3(A)、(B)的图示相反,在Z轴方向上,当音片1a变形为“(”形状时,音片1b变形为“)”形状。
另外,音片1a的下端1c和音片1b的下端1d随着音片1a、1b的振动稍微有些振动,该振动反相振动,以分别与音片1a、1b的振动取得平衡。
一对音片1a、1b在进行沿着上述Z轴方向的检测用振动时,由于该检测用振动,在横梁2上产生了形状变化,尤其是在横梁2的中央部位,产生了比在横梁2的两端2a、2b的近旁的部位之类的其它部位大的形状变化。其结果,设置于横梁2的大致中央部位的检测部6检测横梁2的上述形状变化,并将表示该形状变化的信号输出给计算电路(未图示)。计算电路根据以往公知的方法对上述信号进行计算,由此,可以算出以Y轴为中心轴的振子10的旋转,例如,旋转量、速度、加速度以及方向。
如上所述,根据实施例1的振子10,保持一对音片1a、1b的横梁2,通过把一端2a通过第1连接部3与基座5连接,把另一端2b通过第2连接部4与基座5连接,而连接在基座5上,因此,可以抑制由科里奥利力F引起的检测用振动向基座5扩散、即向基座5泄漏。由此,与不具有实施例1那样的结构的以往的振子相比,一对音片1a、1b的上述检测用振动可以高效率地向横梁2传播,因此,由检测用振动所引起的横梁2的形状变化比以往大,由此,与以往相比,检测部6可以高精度地检测振子10的旋转。
根据实施例1的振子10,进而,由于至少一对音片1a、1b由石英构成,所以可以使一对音片1a、1b的驱动用振动和检测用振动的频率稳定。
取代如上所述将检测部6、即检测电极6a、6b设置于横梁2的大致中央部位,如图4所示,可以将其设置于横梁2的一对音片1a、1b的外侧,更确切地说,通过将其设置于横梁2的一端2a和一个音片1a之间,虽然检测部6不像被设置在横梁2的大致中央部位那样高精度,但与以往相比,至少可以高精度地检测振子10的旋转。
即使取代如上所述使第1连接部3和第2连接部4沿着Y轴方向设置、即以相互平行的关系设置,而设置成不平行的关系,也能获得与上述同样的效果。
通过取代如上所述使一对音片1a、1b的下端1c、1d向横梁2的下方突出,而使其不向横梁2的下方突出,虽然一对音片1a、1b的振动的惯性稍微劣化,但也能获得与上述同样的效果。
另外,在上述实施例中,作为振子的材料,用压电材料的石英进行了说明,但也可以使用镍铬恒弹性合金等恒弹性材料或者钽酸锂(LiTaO3)、铌酸锂(LiNbO3)、磷酸钙(GaPO4)等压电材料。
[实施例2]
图5(A)、图5(B)和图5(C)是表示实施例2的振子的结构的正视图、斜视图和侧视图。实施例2的振子20与实施例1的振子10同样具有一对音片1a、1b、横梁2、第1连接部3、第2连接部4、基座5以及检测部6,另一方面,与实施例1的振子10不同,还具有检测部7。检测部7由具有与实施例1的振子10的检测电极6a、6b相同结构的检测电极7a、7b构成。
检测部6、7设置在横梁2的一对音片1a、1b的外侧,更详细地来说,检测部6设置在横梁2上的、横梁2的一端2a和一个音片1a之间,检测部7设置在横梁2上的、横梁2的另一端2b和一个音片1b之间。
在实施例2的振子20中,检测部6、7分别与实施例1的振子10的检测部6同样,与以往相比,根据一对音片1a、1b的图2所示的驱动用振动和图3所示的检测用振动,可以对以Y轴为中心轴的振子20的旋转进行高精度的检测。除了该旋转的检测,实施例2的振子20,如图5(A)、(B)、(C)所示,如果对振子20施加对本来应该检测的以Y轴为中心轴的旋转来说起干扰作用的、沿着Z轴方向的加速度Fa,则一对音片1a、1b沿着Z轴方向以相互同相的关系变形为“)”形状。由于一对音片1a、1b的上述形状变化,在横梁2的一端2a的近旁的部位和横梁2的另一端2b的近旁的部位产生了相互反相关系的形状变化,即,产生检测部6生成的信号与检测部7生成的信号为相互极性相反关系的形状变化。检测部6、7输出具有上述关系的信号,通过上述计算电路计算处理该两个信号,由此可以除去施加在Z轴方向的加速度Fa所带来的影响。
如上所述,根据实施例2的振子20,除了与实施例1的振子10同样地检测以Y轴为中心轴的振子20的旋转之外,也可以使设置在横梁2上的一对音片1a、1b外侧的检测部6、7协同来检测由Z轴方向的加速度Fa引起的、在设置了检测部6、7的横梁2的部位上所产生的具有相互反相关系的形状变化,因此,可以除去对于以Y轴为中心轴的旋转来说为干扰的Z轴方向的加速度Fa,由此,可以更高精度地检测以Y轴为中心轴的振子20的旋转。
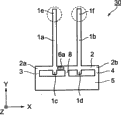
[实施例3]
图6(A)和图6(B)是表示实施例3的振子的结构的正视图和侧视图。实施例3的振子30与实施例1的振子10同样具有一对音片1a、1b、横梁2、第1连接部3、第2连接部4、基座5以及检测部6。另一方面,与实施例1的振子10不同,振子30具有第3连接部(连接部件)8。
第3连接部8是沿着Y轴方向延伸的由具有规定长度的石英构成的棒状部件,将横梁2的大致中央的部位和基座5相连接。此处,把一个音片1a和第3连接部8之间的距离d1、以及另一个音片1b和第3连接部8之间的距离d2,比一个音片1a和横梁2的一端2a之间的距离d3、以及另一个音片1b和横梁2的另一端2b之间的距离d4设定得短。另外,检测部6设置在横梁2上的一个音片1a和第3连接部8之间。
在实施例3的振子30中,检测部6通过进行一对音片1a、1b的图2和图3所示的驱动用振动和检测用振动,与实施例1的振子10同样地检测与以Y轴为中心轴的振子30的旋转相对应所产生的、在设置了检测部6的横梁2的部位上的横梁2的形状变化,由此,可以检测上述旋转。除了检测该旋转之外,由于上述距离d1、d2设定得比距离d3、d4短,即,与第1连接部3和第2连接部4相比,一对音片1a、1b被设置于更靠近第3连接部8的位置上,因此,一对音片1a、1b的上述检测用振动所引起的横梁2的形状变化有集中到第3连接部8或其近旁的倾向,由此,可以更高精度地检测上述旋转。
在实施例3的振子30中,由于具有连接横梁2和基座5的第3连接部8,所以,比起没有第3连接部8的实施例1的振子10,可以提高横梁2和基座5之间布线的自由度。
实施例3的振子30除了在横梁2上的一个音片1a和第3连接部8之间设置了检测部6之外,优选的是如图7(A)所示,在横梁2上的另一个音片1b和第3连接部8之间设置检测部7(检测电极7a等),或者,如图7(B)所示,在横梁2上的一个音片1a和横梁2的一端2a之间设置检测部7(检测电极7a等)。在设置了检测部7的横梁2的部位,产生与在设置了检测部6的横梁2的部位所产生的形状变化为反相关系的形状变化,因此,检测部6、7与实施例2的振子20的检测部6、7同样,可以协同进行用于除去施加在Z轴方向上的加速度Fa的检测。
[实施例4]
图8(A)和图8(B)是表示实施例4的结构的正视图和斜视图。实施例4的振子40具有与实施例1的振子10的一对音片1a、1b、横梁2、第1连接部3、第2连接部4、基座5以及检测部6相对应的一对音片41a、41b、横梁42、第1连接部43、第2连接部44、基座45以及检测部46。
横梁42的一端42a与一个音片41a连接,横梁42的另一端42b与另一个音片41b连接,由此,一对音片41a、41b由横梁42保持。
第1连接部43把横梁42的一端42a与音片41a的交点和基座45相连接,另一方面,第2连接部44把横梁42的另一端42b与音片41b的交点和基座45相连接。检测部46设置在横梁42的大致中央的部位。
在实施例4的振子40中,检测部46根据一对音片41a、41b的图2所示的驱动用振动和图3所示的检测用振动,可以高精度地检测以Y轴为中心轴的振子40的旋转。而且,与实施例1的振子10相比,一对音片41a、41b的驱动用振动和检测用振动很难泄漏到第1连接部43和第2连接部44,换言之,上述振动很容易集中在设置了检测部46的横梁42上,因此,比起实施例1的振子10的旋转,可以高精度地检测以Y轴为中心轴的振子40的旋转。
通过取代将检测部46设置在横梁42的大致中央的部位,如图9所示,而用与实施例3说明的第3连接部8同样的第3连接部48,将横梁42的大致中央部位和基座45相连接,并且,将检测部46设置在一个音片41a和第3连接部48之间,由此,可以获得与上述同样的效果。
另外,取代将检测部46设置在图9所示的横梁42的部位,如图10所示,将与在实施例中说明的检测部7同样的检测部47设置在横梁2上的另一个音片41b和第3连接部48之间,由此,检测部46、47可以与图7所示的实施例3的检测部6、7同样进行协作,进行用于取消Z轴方向的加速度的检测。
[变形例]
图11是表示变形例的振子的结构的正视图。变形例的振子50具有与实施例1的振子10的一对音片1a、1b、横梁2、第1连接部3、第2连接部4、基座5以及检测部6相对应的一对音片51a、51b、横梁52、第1连接部53、第2连接部54、基座55以及检测部56(检测电极56a等)。
横梁52的一端52a与一个音片51a连接,由此形成交点,同样,其另一端52b与另一个音片51b连接,由此形成交点。第1连接部53连接前者的交点和基座55,另外,第2连接部54连接后者的交点和基座55。另外,检测部56设置在横梁52的大致中央部位。
在振子50中,检测部56根据一对音片51a、51b的图2所示的驱动用振动以及图3所示的检测用振动,可以与实施例1的振子10的检测部6同样地检测以Y轴为中心轴的振子50的旋转。
图12是表示其它变形例的振子的结构的正视图。其它变形例的振子60具有与实施例4的振子40的一对音片41a、41b、横梁42、第1连接部43、第2连接部44、基座45以及检测部46相对应的一对音片61a、61b、横梁62、第1连接部63、第2连接部64、基座65、以及检测部66(检测电极66a等)。
第1连接部63和第2连接部64与实施例4的振子40上的直线状延伸的第1连接部43和第2连接部44不同,以圆和椭圆弧之类的曲线状延伸。
在振子60中,检测部66根据一对音片61a、61b的图2所示的驱动用振动和图3所示的检测用振动,与实施例4的振子40的检测部46同样,可以检测以Y轴为中心轴的振子60的旋转。
图13是表示其它变形例的振子的结构图。图13(A)是表示振子的结构的正视图,图13(B)是其斜视图。
变形例的振子80是具有实施例1的振子10的一对音片中的一个音片的振子。
振子80具有音片1a、横梁2、第1连接部3、第2连接部4、基座5以及检测部6(6a、6b)。横梁2的一端2a和另一端2b与音片1a连接,由此形成交点。第1连接部3和第2连接部4分别把横梁2的一端2a和另一端2b与基座5相连接。另外,检测部6设置在横梁2的另一端2b和音片1a之间。
在振子80中,音片1a的驱动用振动和检测用振动与实施例1说明的振子10的音片1a进行同样的振动(参照图2、图3)。这样,振子80的检测部6根据音片1a的驱动用振动和检测用振动,可以检测以Y轴为中心轴的振子80的旋转。
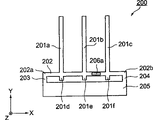
另外,图14是表示其它变形例的振子的结构的正视图。
变形例的振子是具有3个音片的振子200。
振子200具有音片201a、201b、201c、横梁202、第1连接部203、第2连接部204、基座205、以及检测部206(206a以及与206a相对置形成的206b(未图示))。
横梁202把音片201a、201b、201c相连接,一端202a与音片201a连接,由此形成交点,同样,另一端202b与音片201c连接,由此形成交点。第1连接部203把横梁202的一端202a与基座205相连接,另外,第2连接部204把横梁202的另一端202b与基座205相连接。另外,音片201a的下端201d、音片201b的下端201e、音片201c的下端201f向横梁202的下方突出。另外,检测部206设置在横梁202的音片201b和201c之间。
音片201a、201b、201c的驱动模式的驱动用振动沿着X轴方向,各相邻的音片以反相关系进行弯曲振动。更详细地来说,在X轴方向上,当音片201a变形为“(”形状时,音片201b变形为“)”形状,音片201c变形为“(”形状。即,音片201a、201b、201c以相邻的音片的末端相互靠近或者远离的状态进行振动。
另外,该驱动用振动也可以使中央的音片201b不动,而分别反相地驱动音片201a和音片201c。
另外,音片201a、201b、201c的检测模式的检测用振动沿着与假想平面(XY平面)垂直的Z轴方向,以相互反相关系进行弯曲振动。更详细地来说,在Z轴方向上,当音片201a变形为“(”形状时,音片201b变形为“)”形状,音片201c变形为“(”形状。
另外,在驱动振动使中央的音片201b不动,而分别反相地驱动音片201a和音片201c的情况下,检测振动被音片201a和音片201c激励。即,音片201b不动,在Z轴方向上,当音片201a变形为“(”形状时,音片201c变形为“)”形状。
这样,振子200的检测部206根据音片的驱动用振动和检测用振动,可以检测以Y轴为中心轴的振子200的旋转。
另外,在上述实施例中,对音片从1个到3个的实施方式进行了说明,但即使形成4个或更多的音片也能够实施,可以产生同样的效果。
[应用设备]
接着,对本发明的电子设备的实施方式进行说明。
图16是表示电子设备的结构的概略结构图。电子设备100具有包含了上述实施例所述的各个振子的振子90。
作为使用了上述实施例的振子的应用设备,可以列举出有必要检测其状态变化的移动电话、数码相机、摄像机以及导航系统之类的电子设备。该电子设备中,设置在该电子设备中的上述实施例的振子将该电子设备的状态变化作为振子的状态变化来进行检测,由此,可以享受上述的效果。
[实施例5]
接着,对振子的频率调整方法的实施例进行说明。在进行该说明之前,对陀螺振子之类的振子的频率调整的必要性进行说明。
在上述那样的陀螺振子的情况下,采用了由一对音片激励两个振动的结构。一个是驱动音片的驱动用振动,另一个是由与音片的旋转相对应的由科里奥利力引起的检测用振动。并且,这些振动的振动方向不同。
理论上,在该驱动用振动和检测用振动的频率相等时,最能提高旋转的角速度的检测灵敏度。然而,虽然角速度的检测灵敏度良好,但是,振动的振幅变大,因此,在振动达到最大振度而稳定之前需要时间,使角速度的检测响应性变差。另一方面,如果驱动用振动和检测用振动的频率差变大,则检测响应性良好,但是,将音片振动变换为电信号时的S/N比降低,因此,角速度的检测灵敏度变差。
因此,作为振子,为了获得良好的特性,必须将这些频率差设定在规定的范围内。
通常,音片的驱动振动频率(驱动振动的谐振频率)由于制造上的原因而具有偏差,因此必须将其调整为目标频率,另外,驱动振动频率(驱动振动的谐振频率)和检测振动频率(检测振动的谐振频率)的频率差大,因此需要调整该频率差。
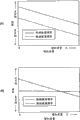
图17是对振子的频率调整进行说明的结构图。另外,图18是对频率调整时驱动振动频率和检测振动频率的变动状态进行说明的概略图。图18(A)是表示调整了驱动振动频率时的频率变动的图,图18(B)是表示调整了检测振动频率时的频率变动的图。
此处,以实施例3所说明的振子30为例进行说明。关于振子30的结构,由于前面已经叙述了,所以省略其说明。
首先,在对作为从横梁2开始长长地延伸的第1延伸部的音片1a、1b的驱动振动频率进行调整时,向音片1a的上端1e或者音片1b的上端1f增加质量,按照使频率降低的方向进行频率调整。具体来说,向音片的上端1e、1f上蒸镀Au或Ag等金属,增加质量。这样,通过控制质量,可以将驱动振动频率调整为规定的频率。
此时,如图18(A)所示,随着驱动振动频率由于质量增加而发生的变化,检测振动频率也发生几乎同样的变化,驱动振动频率和检测振动频率的差几乎没有变化。这样,在改变音片1a的上端1e或音片1b的上端1f的质量时,驱动振动频率和检测振动频率进行相互影响的频率的变动。
接着,为了调整驱动振动频率和检测振动频率的差,向作为从横梁2开始短短地延伸的第2延伸部的音片1a的下端1c、或者音片1b的下端1d增加质量,按照使检测振动频率降低的方向进行频率调整。具体来说,向音片的下端1c、1d上蒸镀Au或Ag等金属来增加质量。
此时频率的变化如图18(B)所示,检测振动频率随着质量的增加而频率降低。与此相对,驱动振动频率稍微降低。由此,可以将驱动振动频率和检测振动频率的差调整在规定的范围内。这样,在改变音片1a的下端1c或音片1b的下端1d的质量时,主要对检测振动频率产生影响,对驱动振动频率几乎不产生影响。即,在检测用振动中,由于音片的下端1c、1d受到音片1a、1b的惯性作用而进行振动,因此,向该音片的下端1c、1d增加质量后的振动对音片1a、1b的检测用振动产生影响。
另外,在上述频率调整中,在调整驱动振动频率和检测振动频率的差之后,驱动振动频率偏离了规定频率的情况下,用激光束对在音片上端1e、1f上增加质量的金属进行照射,通过除去一部分金属,可以提高频率,将其调整为规定的频率。
另一方面,如果在频率调整之前驱动振动频率在规定的范围内,则只进行检测振动频率的调整、即只对音片下端1c、1d的质量进行调整即可,另外,如果驱动振动频率和检测振动频率的差在规定的范围内,则只进行驱动振动频率的调整、即只对音片上端1e、1f的质量进行调整即可。
接着,对使频率调整变得更容易的振子的变形例的结构进行说明。
图19是变形例的振子的结构图。
该变形例的振子70与实施例3的振子30同样,具有横梁72、作为从横梁72开始长长地延伸的第1延伸部的一对音片71a、71b、第1连接部73、第2连接部74、第3连接部78、基座75以及检测部76。另外,振子70与振子30不同,在音片71a、71b的下端形成了作为从横梁72开始短短地延伸的第2延伸部的频率调整部71c、71d。该频率调整部71c、71d的末端具有比其基端大的面积。
对于音片71a、71b的频率调整,与上述方法同样,向音片71a的上端71e或者音片71b的上端71f增加质量,对驱动振动频率进行调整。然后,向音片71a的下端的频率调整部71c或者音片71b的下端的频率调整部71d增加质量,对检测振动频率进行调整。在该振子70中,由于可以向具有大面积的频率调整部71c、71d增加质量,所以,与振子30相比,可以获得更大的频率调整幅度。
这样,在实施例中,主要通过增加质量来进行频率调整,但是,也可以事先增加质量,然后通过除去一部分质量而改变质量,从而调整驱动振动频率和检测振动频率。
如上所述,根据本实施例,可以获得如下的频率调整方法:可以容易地将驱动振动频率和检测振动频率调整在规定的范围内,可以消除以往的不能充分调整频率的问题,并可提高成品率。
另外,本实施方式的振子的频率调整方法不仅可以调整陀螺振子的频率,而且可以用于调整谐振器的频率。
Claims (19)
1、一种振子,其包含:
音片,其是沿着成为振子的旋转中心轴的第1方向延伸的棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;
横梁,其与包含上述音片的假想平面平行,并且在与上述第1方向垂直的第2方向上延伸,且与上述音片连接;
第1检测部,其设置在上述横梁上,对由上述科里奥利力引起的上述音片的第2振动导致的上述横梁的形状变化进行检测;
第2检测部,其设置在上述横梁上,并检测上述横梁的形状变化;
基座,其用于支撑上述横梁;
第1连接部,其连接上述横梁的一端和上述基座;
第2连接部,其连接上述横梁的另一端和上述基座;以及
第3连接部,其连接上述横梁的大致中央部位和上述基座,
其中,上述第1检测部和上述第2检测部协同进行检测,该检测用于除去在与上述假想平面垂直的第3方向上对上述振子的旋转的干扰。
2、根据权利要求1所述的振子,其特征在于,上述音片是沿着成为振子的旋转中心轴的第1方向延伸的相互平行的一对棒状音片。
3、根据权利要求2所述的振子,其特征在于,上述横梁的一端与上述一对音片中的一个音片连接,另一端与上述一对音片中的另一个音片连接。
4、根据权利要求3所述的振子,其特征在于,
上述第1连接部连接上述横梁的上述一端与上述一个音片之间的连接部位和上述基座;
上述第2连接部连接上述横梁的上述另一端与上述另一个音片之间的连接部位和上述基座。
5、根据权利要求2所述的振子,其特征在于,上述横梁的一端和另一端位于上述一对音片的外侧。
6、根据权利要求2所述的振子,其特征在于,上述第1检测部设置在上述一对音片之间。
7、根据权利要求6所述的振子,其特征在于,
上述第1检测部设置在上述一对音片中的一个音片和上述第3连接部之间;
上述第2检测部设置在上述一对音片中的另一个音片和上述第3连接部之间。
8、根据权利要求6所述的振子,其特征在于,
上述第1检测部设置在上述一对音片中的一个音片和上述第3连接部之间;
上述第2检测部设置在上述一个音片、和上述横梁的上述一端与上述另一端中距离该音片较近的一端之间。
9、根据权利要求6所述的振子,其特征在于,上述一对音片中的一个音片和上述第3连接部之间的距离比上述一个音片和上述第1连接部与上述第2连接部中距离上述一个音片较近的连接部之间的距离短。
10、根据权利要求2所述的振子,其特征在于,上述第1检测部设置在上述一对音片外侧的上述横梁的上述一端和上述一对音片中的距离上述横梁的上述一端较近的一个音片之间。
11、根据权利要求10所述的振子,其特征在于,还具有:
第2检测部,其设置在上述一对音片外侧的上述横梁的上述另一端和上述一对音片中的另一个音片之间,并检测上述横梁的形状变化,
上述第1检测部和上述第2检测部协同进行检测,该检测用于除去在与上述假想平面垂直的第3方向上的对上述振子的旋转的干扰。
12、根据权利要求2所述的振子,其特征在于,上述一对音片、上述横梁、上述第1连接部、上述第2连接部以及上述基座由石英构成。
13、一种振子,其包含:
音片,其是沿着成为振子的旋转中心轴的第1方向延伸的棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;
横梁,其与包含上述音片的假想平面平行,并且在与上述第1方向垂直的第2方向上延伸,且与上述音片连接;
第1检测部,其设置在上述横梁上,对由上述科里奥利力引起的上述音片的第2振动导致的上述横梁的形状变化进行检测;
基座,其用于支撑上述横梁;
第1连接部,其连接上述横梁的一端和上述基座;以及
第2连接部,其连接上述横梁的另一端和上述基座,
其中,上述一对音片、上述横梁、上述第1连接部、上述第2连接部以及上述基座由石英构成,
并且其中,上述第1方向为石英的结晶轴的Y轴方向,上述第2方向为石英的结晶轴的X轴方向。
14、根据权利要求13所述的振子,其特征在于,上述音片是沿着成为振子的旋转中心轴的第1方向延伸的相互平行的一对棒状音片。
15、根据权利要求13所述的振子,其特征在于,还具有:
第3连接部,其连接上述横梁的大致中央部位和上述基座;以及
第2检测部,其设置在上述横梁上,并检测上述横梁的形状变化;
上述第1检测部和上述第2检测部协同进行检测,该检测用于除去在与上述假想平面垂直的第3方向上对上述振子的旋转的干扰。
16、一种电子设备,其特征在于,具备权利要求1或13所述的振子。
17、一种振子的频率调整方法,该振子包含:
音片,其是沿着成为振子的旋转中心轴的第1方向延伸的棒状音片,并进行用于产生与上述旋转相对应的科里奥利力的第1振动;
横梁,其与包含上述音片的假想平面平行,并且在与上述第1方向垂直的第2方向上延伸,且与上述音片连接;
基座,其用于支撑上述横梁;
第1连接部,其连接上述横梁的一端和上述基座;以及
第2连接部,其连接上述横梁的另一端和上述基座;
该频率调整方法的特征在于,
调整上述音片的至少一个端部的质量,对振子的频率进行调整。
18、权利要求17所述的振子的频率调整方法,其特征在于,
调整上述音片的从上述横梁开始长长地延伸的第1延伸部的末端的质量,对驱动振动频率和检测振动频率进行调整;调整上述音片的从上述横梁开始短短地延伸的第2延伸部的末端的质量,对驱动振动频率和检测振动频率的差进行调整。
19、权利要求18所述的振子的频率调整方法,其特征在于,
上述第2延伸部的末端设置有形成得比其基端大的频率调整部,调整该频率调整部的质量,对振子的频率进行调整。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003308693 | 2003-09-01 | ||
| JP2003308693 | 2003-09-01 | ||
| JP2004183654 | 2004-06-22 | ||
| JP2004183654A JP4206975B2 (ja) | 2003-09-01 | 2004-06-22 | 振動子、電子機器および振動子の周波数調整方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1590960A CN1590960A (zh) | 2005-03-09 |
| CN100510632C true CN100510632C (zh) | 2009-07-08 |
Family
ID=34106974
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB2004100741819A Expired - Fee Related CN100510632C (zh) | 2003-09-01 | 2004-09-01 | 振子、电子设备及振子的频率调整方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7246520B2 (zh) |
| EP (1) | EP1510783A3 (zh) |
| JP (1) | JP4206975B2 (zh) |
| CN (1) | CN100510632C (zh) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005217903A (ja) * | 2004-01-30 | 2005-08-11 | Seiko Epson Corp | 音叉型振動片及び電子機器 |
| JP2006058101A (ja) * | 2004-08-19 | 2006-03-02 | Seiko Epson Corp | 振動片、振動子および応用機器 |
| DE102005045379A1 (de) * | 2005-09-22 | 2007-03-29 | Eads Deutschland Gmbh | Drehratensensor |
| JPWO2007055133A1 (ja) * | 2005-11-08 | 2009-04-30 | パナソニック株式会社 | 角速度センサおよびその製造方法 |
| JP4850572B2 (ja) * | 2006-04-19 | 2012-01-11 | 富士通株式会社 | 角速度センサ |
| JP2008058062A (ja) * | 2006-08-30 | 2008-03-13 | Epson Toyocom Corp | 角速度センサ |
| JP2008157810A (ja) * | 2006-12-25 | 2008-07-10 | Tdk Corp | 角速度センサ素子および角速度センサ装置 |
| JP2008249489A (ja) * | 2007-03-30 | 2008-10-16 | Tdk Corp | 角速度センサ素子および角速度センサ装置 |
| JP4992512B2 (ja) * | 2007-03-30 | 2012-08-08 | Tdk株式会社 | 角速度センサ素子および角速度センサ装置 |
| DE102007035770B4 (de) * | 2007-07-27 | 2011-04-14 | Continental Automotive Gmbh | Vorrichtung zur Bestimmung der Viskosität und/oder Dichte einer Flüssigkeit |
| JP5482250B2 (ja) | 2010-02-02 | 2014-05-07 | セイコーエプソン株式会社 | 振動体および振動デバイス |
| JP5516119B2 (ja) * | 2010-06-21 | 2014-06-11 | セイコーエプソン株式会社 | 振動型ジャイロ素子、振動型ジャイロセンサーおよび振動型ジャイロセンサーによる角速度の検出方法 |
| KR101310408B1 (ko) * | 2011-09-29 | 2013-09-23 | 삼성전기주식회사 | 관성센서 및 이를 이용한 각속도 검출방법 |
| JP6003150B2 (ja) * | 2012-03-28 | 2016-10-05 | セイコーエプソン株式会社 | 振動片およびジャイロセンサー並びに電子機器および移動体 |
| CN109477717B (zh) * | 2016-07-26 | 2022-09-23 | 京瓷株式会社 | 角速度传感器、传感器元件及多轴角速度传感器 |
| CN111780735B (zh) * | 2020-05-28 | 2022-03-08 | 深迪半导体(绍兴)有限公司 | Mems陀螺仪驱动幅度校正装置及方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5166571A (en) * | 1987-08-28 | 1992-11-24 | Nec Home Electronics, Ltd. | Vibration gyro having an H-shaped vibrator |
| JPH05240874A (ja) * | 1991-12-06 | 1993-09-21 | Canon Inc | 角速度センサ |
| JPH0769180A (ja) | 1994-05-17 | 1995-03-14 | Mk Seiko Co Ltd | 洗車装置 |
| JP3326989B2 (ja) * | 1994-08-25 | 2002-09-24 | 株式会社豊田中央研究所 | 振動子とその調整方法および角速度センサ |
| US5763781A (en) * | 1995-02-23 | 1998-06-09 | Netzer; Yishay | Coupled resonator vibratory rate sensor |
| EP0939296A3 (en) | 1996-03-29 | 2001-01-17 | Ngk Insulators, Ltd. | Vibration gyro sensor, combined sensor, and method for producing vibration gyro sensor |
| JPH1047971A (ja) * | 1996-08-05 | 1998-02-20 | Nippon Soken Inc | 角速度センサ |
| JPH10160479A (ja) | 1996-12-03 | 1998-06-19 | Toyota Motor Corp | 角速度センサの共振周波数調整装置及び共振周波数調整方法 |
| JPH10170272A (ja) | 1996-12-10 | 1998-06-26 | Seiko Epson Corp | 圧電ジャイロセンサ及びその製造方法 |
-
2004
- 2004-06-22 JP JP2004183654A patent/JP4206975B2/ja not_active Expired - Fee Related
- 2004-08-30 US US10/928,103 patent/US7246520B2/en not_active Expired - Fee Related
- 2004-08-31 EP EP04020676A patent/EP1510783A3/en not_active Withdrawn
- 2004-09-01 CN CNB2004100741819A patent/CN100510632C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| EP1510783A3 (en) | 2006-01-04 |
| EP1510783A2 (en) | 2005-03-02 |
| US20050086995A1 (en) | 2005-04-28 |
| CN1590960A (zh) | 2005-03-09 |
| JP4206975B2 (ja) | 2009-01-14 |
| JP2005098983A (ja) | 2005-04-14 |
| US7246520B2 (en) | 2007-07-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100510632C (zh) | 振子、电子设备及振子的频率调整方法 | |
| KR101384597B1 (ko) | 진동편, 센서 유닛, 전자 기기, 진동편의 제조 방법 및 센서 유닛의 제조 방법 | |
| KR100261357B1 (ko) | 각속도 검출 장치 | |
| CN101487708B (zh) | 振动陀螺元件、振动陀螺元件的支撑结构和陀螺传感器 | |
| CN103245339A (zh) | 振动片、传感器单元以及电子设备 | |
| JP6078968B2 (ja) | 振動片の製造方法 | |
| KR20070049250A (ko) | 진동형 자이로스코프 및 진동형 자이로스코프의 제조 방법 | |
| JP3805837B2 (ja) | 角速度検出装置 | |
| CN101236082B (zh) | 振动陀螺传感器、控制电路和电子设备 | |
| JP2013205237A (ja) | 振動片およびその製造方法並びにジャイロセンサーおよび電子機器および移動体 | |
| JP2006201118A (ja) | 圧電振動ジャイロ素子およびジャイロセンサ | |
| US8453503B2 (en) | Vibrating reed, vibrator, physical quantity sensor, and electronic apparatus | |
| WO2001044755A1 (fr) | Capteur de vitesse angulaire | |
| JPH09178492A (ja) | 圧電振動体 | |
| JP2008151633A (ja) | 角速度センサの製造方法 | |
| US20050061073A1 (en) | Vibratory gyroscope and electronic apparatus | |
| JP2002213962A (ja) | 角速度センサ及びその製造方法 | |
| JP2000074676A (ja) | 角速度センサ | |
| JP2016173378A (ja) | ジャイロセンサー素子、ジャイロセンサーユニット、電子機器及びジャイロセンサーユニットの製造方法 | |
| JPH1019576A (ja) | 角速度検出装置 | |
| JP2013096882A (ja) | 物理量検出素子、物理量検出装置、および電子機器 | |
| JP3028999B2 (ja) | 振動ジャイロ | |
| JP6361707B2 (ja) | 振動片、センサーユニット、電子機器、および、振動片の製造方法 | |
| JPH10253363A (ja) | 角速度センサ素子及びそれを用いた角速度センサ | |
| JP2005077249A (ja) | 圧電体振動ジャイロセンサ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090708 Termination date: 20130901 |