CN100496400C - 动态螺旋扫描图像产生的方法和设备 - Google Patents
动态螺旋扫描图像产生的方法和设备 Download PDFInfo
- Publication number
- CN100496400C CN100496400C CNB200410085253XA CN200410085253A CN100496400C CN 100496400 C CN100496400 C CN 100496400C CN B200410085253X A CNB200410085253X A CN B200410085253XA CN 200410085253 A CN200410085253 A CN 200410085253A CN 100496400 C CN100496400 C CN 100496400C
- Authority
- CN
- China
- Prior art keywords
- stored
- projection view
- projection
- image
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims abstract description 67
- 238000003384 imaging method Methods 0.000 claims abstract description 28
- 238000003860 storage Methods 0.000 claims description 22
- 238000001914 filtration Methods 0.000 claims description 17
- 230000033001 locomotion Effects 0.000 claims description 17
- 238000013170 computed tomography imaging Methods 0.000 claims description 10
- 230000014759 maintenance of location Effects 0.000 claims 1
- 230000008569 process Effects 0.000 description 40
- 238000002591 computed tomography Methods 0.000 description 17
- 230000000694 effects Effects 0.000 description 10
- 230000008859 change Effects 0.000 description 9
- 230000006870 function Effects 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 238000012360 testing method Methods 0.000 description 7
- 241000446313 Lamella Species 0.000 description 6
- 238000004422 calculation algorithm Methods 0.000 description 5
- 230000001276 controlling effect Effects 0.000 description 4
- 125000004122 cyclic group Chemical group 0.000 description 4
- 238000013461 design Methods 0.000 description 4
- 230000008520 organization Effects 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 230000000007 visual effect Effects 0.000 description 4
- 230000010412 perfusion Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- 230000008707 rearrangement Effects 0.000 description 2
- 238000003325 tomography Methods 0.000 description 2
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 238000005352 clarification Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000002059 diagnostic imaging Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000002349 favourable effect Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 238000010606 normalization Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000001105 regulatory effect Effects 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computed tomography [CT]
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/70—Means for positioning the patient in relation to the detecting, measuring or recording means
- A61B5/704—Tables
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus or devices for radiation diagnosis; Apparatus or devices for radiation diagnosis combined with radiation therapy equipment
- A61B6/02—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/027—Arrangements for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis characterised by the use of a particular data acquisition trajectory, e.g. helical or spiral
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N23/00—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00
- G01N23/02—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material
- G01N23/04—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material
- G01N23/046—Investigating or analysing materials by the use of wave or particle radiation, e.g. X-rays or neutrons, not covered by groups G01N3/00 – G01N17/00, G01N21/00 or G01N22/00 by transmitting the radiation through the material and forming images of the material using tomography, e.g. computed tomography [CT]
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/40—Imaging
- G01N2223/419—Imaging computed tomograph
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N2223/00—Investigating materials by wave or particle radiation
- G01N2223/60—Specific applications or type of materials
- G01N2223/612—Specific applications or type of materials biological material
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S378/00—X-ray or gamma ray systems or devices
- Y10S378/901—Computer tomography program or processor
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Animal Behavior & Ethology (AREA)
- Heart & Thoracic Surgery (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Biophysics (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- High Energy & Nuclear Physics (AREA)
- Optics & Photonics (AREA)
- Pulmonology (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Physics & Mathematics (AREA)
- Immunology (AREA)
- Apparatus For Radiation Diagnosis (AREA)
- Image Processing (AREA)
- Image Analysis (AREA)
Abstract
本发明的一些构型提供一种产生对象(22)的图像的方法。该方法包括利用扫描成像系统动态地螺旋地扫描在运动工作台(46)上的对象。在扫描的过程中,与对应的工作台位置一起采集(108)并存储对象的投影视图。选择(114)对象的图像的重构的平面。利用(116)所存储的工作台位置来确定可应用于所存储的投影视图的几何变量;以及利用该几何变量对所存储的投影视图进行滤波(118)和反向投影以重构在重构平面上的对象的图像。
Description
技术领域
本发明总体涉及扫描成像系统,更具体地说,涉及通过具有在对象或人的扫描过程中能够以可变的速率移动的工作台的扫描成像系统产生图像。
背景技术
公知的扫描计算机断层(CT)成像系统不允许在扫描的过程中改变螺旋扫描的间距。相反,在CT扫描过程中螺旋间距(即工作台速度)保持恒定。为实现恒定的工作台速度,工作台设置于远离所需的开始位置的距离并加速到所需的速度。在加速的过程中,X-射线束不接通并且不采集数据。在工作台达到所需的速度并且通过开始位置时,束接通并开始数据采集。
更快且更高性能的扫描CT成像系统具有更多的临床应用。在心脏和灌注领域中几种新的临床应用要求扫描CT成像系统在扫描的同时改变它的间距。例如,典型头部灌注要求覆盖沿患者的轴线(即成像系统的z-轴,即对应于患者的从头到脚的轴)的4-8厘米。公知的多片层CT成像系统在任何给定时刻仅能够覆盖2厘米。因此,以往复的模式采集灌注数据比较有利,在这种往复模式中患者工作台在扫描的过程中来回运动以覆盖整个灌注器官。例如这种往复模式要求在工作台运动的上冲和下冲的过程中进行数据采集和重构。公知的扫描CT成像系统没有这种能力。
发明内容
因此本发明的某些构型提供了一种产生对象的图像的方法。该方法包括利用扫描成像系统动态地螺旋地扫描在运动工作台上的对象。在扫描的过程中,与对应的工作台位置一起采集并存储对象的投影视图。选择用于对象的图像的重构的平面。使用所存储的工作台位置以确定应用于所存储的投影视图的几何变量;利用该几何变量对所存储的投影视图进行滤波和反向投影以重构对象在重构平面上的图像。
本发明的某些其它构型提供了一种产生对象的图像的方法,该方法包括利用扫描成像系统动态地螺旋地扫描在运动工作台上的对象,采集并存储对象的投影视图和仅某些所采集的投影视图的相应的所确定或所估计的工作台位置。选择重构对象的图像的平面并利用所存储的工作台位置确定应用于所存储的投影视图的几何变量。利用该几何变量对所存储的投影视图进行滤波和反向投影以重构对象在重构平面上的图像。
本发明的其它的构型提供了一种成像设备,该成像设备被构造成动态地螺旋地扫描在运动工作台上的对象。该设备进一步被构造成采集并存储对象的投影视图和相应的工作台位置,利用所存储的工作台位置确定应用于所存储的投影视图的几何变量;以及利用该几何变量对所存储的投影视图进行滤波和反向投影以重构对象在所选择的重构平面上的图像。
本发明的其它的构型也提供了一种成像设备,该成像设备被构造成动态地螺旋地扫描在运动工作台上的对象。该成像设备进一步被构造成采集并存储对象的投影视图和仅某些所采集的投影视图的相应的确定或估计的工作台位置。此外,该成像设备被构造成利用所存储的工作台位置确定应用于所存储的投影视图的几何变量;以及利用该几何变量对所存储的投影视图进行滤波和反向投影以重构对象在所选择的重构平面上的图像。
本发明的各种构型允许在图像重构的过程中使用精确或几乎精确的工作台位置。这些构型例如对在螺旋扫描过程中改变患者的速度或加速度以满足临床的要求是有用的。本发明的应用包括(但不限于)心脏扫描应用和灌注应用。此外,在以固定螺旋扫描间距扫描时可以提供在患者工作台的加速和/或减速的过程中开始螺旋扫描的能力。
附图说明
附图1所示为CT成像系统的附图。
附图2所示为在附图1中所示的系统的方块示意图。
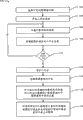
附图3所示为代表在与每个采集的投影视图一起存储工作台位置的本发明的某些构型中执行的扫描和图像重构的流程图。
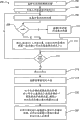
附图4所示为代表在仅与某些采集的投影视图一起存储工作台位置的本发明的某些构型中执行的扫描和图像重构的流程图。
附图5所示为代表在仅与某些采集的投影视图一起存储工作台位置并且还对所采集的视图进行加权以避免在重构的图像中的留下阴影和/或拖尾假像的本发明的某些构型中执行的扫描和图像重构的流程图。
具体实施方式
将会理解到,在此所描述的本发明的构型的技术效果是利用动态螺旋扫描进行对象或患者的扫描和重构。
在某些公知的CT成像系统构型中,X-射线源投影扇形束,对该扇形束进行准直以使其位于笛卡儿坐标系的X-Y平面(一般称为“成像平面”)内。X-射线束通过正成像的对象比如患者。在被对象衰减之后X-射线束撞击到辐射检测器的阵列上。在检测器阵列上接收的经衰减的辐射束的强度取决于对象对X-射线束的衰减。阵列的每个检测器元件产生作为在检测器位置上的束强度的测量的单独的电信号。分别采集来自所有的检测器的强度测量以形成透射分布。
在第三代CT系统中,X-射线源和检测器阵列在成像平面内绕要成像的对象与机架一起旋转以使X-射线束与对象交叉的角度恒定地变化。来自在一个机架角度上的检测器阵列的一组X-射线衰减测量值(即投影数据)称为一个“视图”。对象的一次“扫描”包括在X-射线源和检测器的一圈旋转中不同的机架角度或视角上形成的一组视图。
在轴向扫描中,投影数据被处理以重构对应于通过对象形成的二维片层的图像。从一组投影数据中重构图像的一种方法在本领域中称为滤波反向投影技术。这种处理将来自扫描的衰减测量值转换为称为“CT数”或“Hounsfield单元”(HU)的整数,使用该整数来控制在阴极射线管显示器上的相应的像素的量度。
为减小总的扫描时间,可以执行“螺旋“扫描。为执行“螺旋”扫描,在采集预定数量的片层的数据的同时移动患者。这种系统从扇形束螺旋扫描中产生单螺旋线。通过扇形束绘制出的螺旋线产生投影数据,从该投影数据中可以重构在每个预定的片层中的图像。
螺旋扫描的重构算法通常使用螺旋加权算法,这种算法按视角和检测器通道索引的函数对采集的数据进行加权。具体地说,在进行滤波反向投影处理之前,根据螺旋加权系数对数据进行加权,该加权系数是机架和检测器角度两者的函数。然后对经加权的数据进行处理以产生CT数并重构对应于通过对象形成的二维片层的图像。
为进一步减小总的采集时间,已经引入了多片层CT。在多片层CT中,在任何时刻总是同时采集多行投影数据。在与螺旋扫描模式组合时,该系统产生锥形束的投影数据的单螺旋线。类似于单片层螺旋、加权方案,导出一种方法来在滤波反向投影算法之前将权重与投影数据相乘。
正如在此所使用,以单数的并在其前面冠以“一”的一元件或步骤应该被理解为不排除多个所说的元件或步骤,除非这种排除是明确说明的。此外,参考本发明的“一种实施例”并不希望被解释为排除同样引入了所述特征的附加的实施例的存在。
正如在此所使用,术语“重构图像”并不希望排除这样的本发明的实施例:其中产生了表示图像的数据但没有产生可视的图像。然而,许多实施例产生(或者被构造为产生)至少一个可视的图像。
此外,还正如在此所使用,术语“动态螺旋扫描”是指这样的螺旋扫描,其中在扫描间距改变的同时采集数据。更具体地说,在本发明的构型中,在扫描中保持对象的工作台在进行扫描的同时加速或减速以形成可变间距的扫描。为了本发明的目的,加速或减速是否是有意的、偶然的或者完全无意的都不要紧,虽然在这里所描述的构型中,它是有意的。在某些有意加速或减速的情况下,使用反馈环来在扫描过程中调节工作台速度。
在本发明的某些构型中,从使用所测量的或估计的工作台位置确定X-射线管和检测器相对于图像重构平面的位置这个意义上讲,扫描的间距是可变的。在这些构型中,对于部分或所有的扫描,工作台以恒定的速度移动,但是在以恒定的间距扫描时并不限制它这样。除非另外特别说明,其中在上文所述的扫描间距可变的扫描希望被包括在术语“动态螺旋扫描”的范围内。
此外,尽管并不要求恒定的机架旋转速度来实践本发明,但是在此所描述的本发明的构型在数据采集的过程中具有恒定的机架旋转速度。
参考附图1和2,所示的多片层扫描成像系统例如计算机断层(CT)成像系统10包括代表“第三代”CT成像系统的机架12。机架12具有将X-射线束16朝在机架12的相对侧上的检测器阵列18投射的X-射线管14(在此也称为X-射线源14)。检测器阵列18由包括多个检测器元件20的多个检测器行(未示)形成,该多个检测器元件20一起感测通过对象(比如在阵列18和源14之间的医疗患者22)投影的X-射线。每个检测器元件20产生表示撞击的X-射线束的强度的电信号,由此可以使用该电信号估计在X-射线束通过对象或患者22时它的衰减。在采集X-射线投影数据的扫描的过程中,机架12和安装在其中的部件绕旋转中心24旋转。附图2仅示出了单行检测器元件20(即一个检测器行)。然而,多片层检测器阵列18包括多个平行的检测器行的检测器元件20以使对应于多个准平行或平行的片层的投影数据在一个扫描的过程中被同时采集。
在机架12上的部件的旋转和X-射线源14的操作由CT系统10的控制机构26控制。控制机构26包括给X-射线源14提供功率和时序信号的X-射线控制器28和控制在机架12上部件的旋转速度和位置的机架马达控制器30。在控制机构26中的数据采集系统(DAS)32从检测器元件20中采集模拟数据并将该数据转换为数字信号以用于随后的处理。图像重构器34从DAS 32接收采样的并数字化的X-射线数据并执行高速的图像重构。经重构的图像作为输入应用到计算机36,该计算机36在存储装置38中存储图像。图像重构器34可以是专用的硬件或在计算机36上执行的计算机程序。
计算机36也通过具有键盘的操作台40从操作员接收指令和扫描参数。相关的阴极射线管显示器42允许操作员观测来自计算机36的经重构的图像和其它的数据。计算机36使用操作员输送的指令和参数来提供控制信号和信息给DAS32、X-射线控制器28和机架马达控制器30。此外,计算机36操作控制机动化的工作台46以定位在机架12中的患者22的工作台马达控制器44。具体地说,工作台46通过机架开口48移动患者22的各部分。
在一个实施例中,计算机36包括装置50,例如软盘驱动器、CD-ROM驱动器、DVD驱动器、磁光盘(MOD)装置或包括用于从计算机可读介质52比如软盘、CD-ROM、DVD或其它的数字源比如网络或因特网读取指令和/或数据的网络连接装置比如以太网装置的任何其它数字装置以及尚待开发的数字装置。在另一实施例中,计算机36执行存储在固件(未示)中的指令。计算机36被编程为执行在此所描述的各种功能,正如在此所使用,术语计算机并不仅限于在本领域中称为计算机的那些集成电路,而是宽泛地指计算机、处理器、微控制器、微型计算机、可编程逻辑控制器、专用集成电路和其它的可编程电路,这些术语在此可互换地使用。虽然上述的具体的实施例指第三代CT系统,但是在此所描述的方法可以同等地应用到第四代CT系统(静止的检测器-旋转X-射线源)和第五代CT系统(静止的检测器和X-射线源)。此外,可以设想,本发明的好处可应用于除了CT之外的成像模态。此外,虽然在此所描述的方法和设备在医疗设施中描述,但是本发明的好处也可以应用于非医疗成像系统比如在工业设施或运输设施中通常运用的那些系统。这种成像系统的实例包括(但不限于)用于机场或其它的运输中心的行李扫描系统。
本发明的某些构型允许在扫描的过程中改变螺旋间距。这种扫描称为“动态螺旋扫描”。这些构型精确地确定或估计对象或患者22在z-方向上的位置并与所采集的CT原始图像数据一起包括或存储该位置数据。在这些构型中,以根据精确的要求和实用性确定的频率报告工作台46的位置。
更具体地说,在某些构型中,与动态螺旋扫描的每个投影采样(即每个投影视图)一起报告的工作台46位置的位置与工作台46位置和衰减信息一起采样。然而,对于有利地使用动态螺旋扫描模式的许多使用,在多种公知的CT成像系统10中的位置编码器(未示)的速度和精度并不足以满足位置报告所要求程度的严格要求。因此,本发明的其它构型每第N个视图报告工作台46的位置,这里N根据工作台46的加速度和减速度特征选择,或预先确定(即事先选择)。在加速度和减速度足够平稳的构型中,N的值可以较大。在加速度和减速度具有非常高的频率分量的构型中,N的值应该更小。
用于估计工作台46位置的估计算法的选择也影响该实际的N的范围。例如,为估计在两个所测量的位置之间的中间位置,某些构型利用线性插值或者更高阶的插值(比如拉格朗日插值)。更高阶的插值允许极大的非线性,同时维持估计精度。在插值之后,对每个投影视图产生工作台46的位置。在某些构型中,为实现某些类型的插值,尤其是为完成非线性插值,在扫描的过程中改变N的值。仅作为举例,如果计数器J用于扫描计数并且N的第一个值是8,则第一工作台位置可以记录为J=8,随后J复位到1,并且N改变到5。在J=5时记录第二工作台位置然后,随后J复位到1,并且N改变到6,等。
图像重构使用原始图像数据连同对象或患者22的z-轴位置(或同义语“z位置”)以重构在用户界定的位置(即,用户定义的对象或患者22的“片层”或图像重构平面)上的图像。在某些构型中重构处理包括反向反向投影处理的调节。更具体地说,对于在本发明的构型中的动态螺旋扫描,X-射线管14和检测器18相对于图像重构平面的位置根据工作台46的所测量的或估计的位置计算。这个位置信息输入到反向投影处理以确保精确地确定每个X-射线路径。
除了在确定每个X-射线路径的过程中使用工作台46的所测量的或估计的位置之外,本发明的某些构型也将投影采样的贡献归一化到重构的图像的每个像素。在本发明的某些构型中,在执行扫描时确定动态螺旋扫描的权重。这些所确定的权重用于以避免留下阴影和/或拖尾假像的方式对冗余数据加权。(对于恒定的间距螺旋扫描,在扫描开始之前可以确定每个投影采样的位置,允许在扫描之前事先确定权重)。
例如,对于每个图像位置,利用视图的机架12的位置确定中心视图。一般地,对于特定的图像的重构可用的衰减数据量大于最小的半扫描要求。因此,在某些构型中,改变中心视图位置(而不是图像重构位置),并对于不同的投影组形成一组权重。在某些构型中重复这个过程以确保对成像平面有作用的所有的投影都被使用。然后对半扫描权重进行适当加权并求和以形成最后的螺旋权重。
在本发明的某些构型中,确定对在图像中的每个像素位置有作用的投影视图数。一旦投影数能够足够满足对完整重构的要求,则消除附加投影的影响(如果有的话)以避免冗余。
在本发明的多种构型中,在工作台移动的同时重构一个或多个图像平面并在扫描的过程中采集数据。对于本领域普通技术人员来说处理流水线是十分公知的,正如过程重新排序一样,在过程重新排序中一个的输入在时间或值上不取决于另一个的输出。因此,可以相信描述流水线构造所要求的增加的复杂度将影响本发明的简明的描述。结果,为使解释简明起见,在此所描述的多种构型在扫描中采集视图数据并在扫描已经完成和工作台运动结束之后在预先选择的图像平面上仅重构一个图像。
此外,有多种可以实施叠代循环的方法。变型方法包括初始化循环变量为1并上计数到极限,初始化循环变量到极限并下计数到1,初始化循环变量到0而不是1,测试循环顶部而不是底部(或反之亦然)等。“簿记”细节比如要使用哪种循环实施方案作为设计选择留给本领域普通技术人员。某些其它细节符合被最佳地描述为“末端效应(endeffects)”的种类。末端效应包括诸如是否需要或希望记录第一视图(而不是在第N个视图的第一次)和/或最后视图的工作台46的位置的细节,即使最后的视图不是“第N个视图”。这种末端效应的处理也作为设计选择留给本领域普通技术人员。
此外,将会认识到,在本发明的构型中可用的工作台46的位置信息由计算机36和/或图像重构器34用于确定在加权、归一化、滤波和反向投影过程中使用的几何变量。本领域中一个普通技术人员会理解到构造成像系统10以利用工作台46位置信息来确定这些变量所需的设计选择。此外,本发明并不限制其它的设计选择,比如所使用的加权函数的选择。例如,对于提供或可作选择用的一个或多个不同的加权函数的构型没有限制。
通过前述的说明并参考附图3,附图3示出了代表本发明的某些构型的流程图100。通过流程图100所描述的本发明的处理的技术效果是对象或患者22的扫描及其图像的产生。本发明的构型允许为实现所期望的技术效果按照在流程图100中的操作顺序操作、在合乎逻辑的并且是可能的程度上增加附加的操作或改变操作的顺序。
在102中选择动态螺旋扫描类型。(在除了动态螺旋扫描之外不提供扫描类型选择的构型中可以省去选择102)。然后在104中根据动态扫描的参数开始工作台46的运动。在106中采集在工作台46上正在扫描的对象或患者22的投影视图。在通过流程图100所描述的构型中,对于每次这种采集确定工作台46的位置,在108中存储视图和对应的工作台位置。如果扫描没有完成,则过程返回到106以采集另一投影视图。如果扫描结束,则在112中停止工作台46的运动并在114选择图像的重构平面。在116中,对于每个相应的存储的视图,使用所存储的工作台位置来确定X-射线管14和检测器18相对于所选择的图像重构平面的位置。在118中,利用所确定的X-射线管和检测器位置和所存储的视图,执行滤波和反向投影以在重构平面上重构对象或患者22的图像。
在本发明的某些构型中,参考附图2和附图3,在108的扫描的过程中工作台46的位置报告给计算机36并通过计算机36直接或间接控制在扫描过程中执行的物理操作。在108存储所采集的数据和工作台46位置于存储装置38中。使用操作员操作台40和显示器42进行选择,通过操作员可以执行在102中的动态螺旋扫描的选择和/或图像位置或重构平面的选择。否则,通过计算机36自动地执行螺旋扫描的选择和/或图像位置或重构平面的选择。(多种流水线的构型自动或手动地选择每次扫描的多个图像位置或重构平面并使用已经采集并存储的视图来重构对象或患者的图像,同时采集并存储其它图像的其它视图)。通过计算机36利用在存储装置38中存储的数据执行在116的位置确定,并通过图像重构器34执行滤波和反向投影。其它的构型允许对在成像系统10的各种不同的部件中不同地划分上述的功能。
参考附图4,示出了表示本发明的一些构型的另一流程图200。通过流程图200所描述的本发明的处理的技术效果是对象或患者22的扫描及其图像的产生。本发明的构型允许为实现所期望的技术效果按照在流程图200中的操作进行流水线操作、增加附加的操作或在合乎逻辑的并且是可能的程度上改变操作的顺序。
在202中选择动态螺旋扫描类型。(在除了动态螺旋扫描之外不提供扫描类型选择的构型中可以省去选择202)。然后在204中根据动态扫描的参数开始工作台46的运动,并初始化循环变量J。在206中采集在工作台46上正被扫描的对象或患者22的投影视图。在通过流程图200所描述的构型中,仅对于每第N个采集确定工作台46的位置。因此,在208中执行测试以确定对这次采集是否确定工作台46的位置。如果没有位置要存储,则在210中循环变量递增并存储所采集的视图。否则,确定(或估计)工作台46的位置,在212中与相应的采集视图一起存储该位置,并重新初始化循环变量。在任一情况下,在214中执行测试以确定扫描是否完成。如果没有完成,则在206中采集对象的另一投影视图。否则,在216中停止工作台并在218中选择重构图像的平面。在220中使用所存储的工作台46位置确定所存储的视图的X-射线管14和检测器18相对于图像重构平面的位置。对于在212中没有存储的相应的工作台位置的存储的视图,使用插值估计工作台位置。在222中,利用所确定的和/或插值的X-射线管和检测器位置和所存储的视图,执行滤波和反向投影以在重构平面上重构对象或患者22的图像。
返回到附图5,示出了表示本发明的一些构型的另一流程图300。通过流程图300所描述的本发明的处理的技术效果是对象或患者22的扫描及其图像的产生。本发明的构型允许为实现所期望的技术效果按照在流程图300中的操作执行流水线操作、增加附加的操作或在合乎逻辑的并且是可能的程度上改变操作顺序。
在302中选择动态螺旋扫描类型。(在除了动态螺旋扫描之外不提供扫描类型选择的构型中可以省去选择302)。然后在304中根据动态扫描的参数开始工作台46的运动,并初始化循环变量J。在306中采集在工作台46上正被扫描的对象或患者22的投影视图。在308中使用当前的机架12位置确定所选择的图像位置的中心视图,在308中对于所选择的图像位置的投影视图确定半扫描权重。在通过流程图300所描述的构型中,仅对于每第N个采集确定工作台46的位置。因此,在310中执行测试以确定对这次采集是否确定工作台46的位置。如果没有位置要存储,则在312中循环变量递增并存储所采集的视图。否则,确定(或估计)工作台46的位置,在314中与相应的采集视图一起存储该位置,并重新初始化循环变量。在任何情况下,在214中执行测试以确定扫描是否完成。如果没有完成,则在316中采集对象的另一投影视图。否则,在318中停止工作台。在320中使用在308中所确定的半扫描权重确定最终的螺旋权重并使用最后的螺旋权重对所存储的视图进行加权。在322中使用所存储的工作台46位置确定所存储的视图的X-射线管14和检测器18相对于图像重构平面的位置,对于在314中没有存储工作台位置数据的那些视图使用插值来估计工作台46位置。在324中,对加权的视图执行滤波和反向投影以重构在重构平面上的对象的图像。这个滤波和反向投影利用在322中所确定的X-射线管14和检测器18的位置。
将会理解到,本发明的各种构型允许在图像重构过程中使用精确或几乎精确的工作台位置,因此在螺旋扫描过程中可以改变患者的速度或加速度以满足临床要求。这种能力对于增强的应用尤其有用,这些增强的应用包括(但不限于)心脏扫描应用和灌注应用。此外,在以固定螺旋扫描间距扫描时可以提供在患者工作台的加速和/或减速的过程中开始螺旋扫描的能力。
本发明的构造并不限于计算机断层(CT)。其它的成像模态比如磁共振(MR)也可以被用于以动态改变的工作台速度采集图像。
此外,在此所公开的实例中描述的各种动态扫描以“开环”的方式执行。但是,本发明的构型可以包括反馈以在扫描的过程中调节工作台速度。例如,基于所测量的投影和/或其它的信息,可以调节螺旋间距以获得改进的或最佳的临床结果,比如最大的对比度增强。这种构型的实例将会在附图3的方块108和110之间提供将当前的工作台位置和所需的工作台位置进行比较并以补偿的方式调节工作台的运动的附加功能。例如在附图4的方块214直接之前(与是否通过方块210或方块212到达方块214无关)或者在附图5的方块316直接之前(与是否通过方块312或方块314到达方块316无关)也可以增加类似的功能。这些实例并不被认为是其中可以增加反馈以在扫描的过程中调节工作台速度的多种方式的穷举。
虽然根据不同的具体实施例已经描述了本发明,但是本领域普通技术人员会认识到本发明还可以以在权利要求的精神和范围内的变型方式实施。
部件清单:
CT系统 10
机架 12
X-射线管或X-射线源 14
X-射线束 16
检测器阵列 18
检测器元件 20
对象或患者 22
旋转中心 24
控制机构 26
X-射线控制器 28
机架马达控制器 30
数据采集系统(DAS) 32
图像重构器 34
计算机 36
存储装置 38
操作台 40
阴极射线管显示器 42
工作台马达控制器 44
机架开口 48
装置 50
计算机可读装置 52
流程图 100
选择动态螺旋扫描类型 102
根据动态扫描的参数开始工作台的运动 104
采集正在工作台上扫描的对象或患者的投影视图 106
确定每次这种采集的工作台位置,以及存储该视图和相应的工作台位置 108
方块 110
如果扫描结束停止工作台的运动 112
选择用于图像重构的平面 114
对于每个相应的存储的视图,使用所存储的工作台位置确定X-射线管和检测器相对于所选择的图像重构平面的位置 116
利用所确定的X-射线管和检测器位置和所存储的视图执行滤波和反向投影以重构对象或患者在重构平面上的图像 118
流程图 200
选择动态螺旋扫描类型 202
根据动态扫描的参数开始工作台的运动,并初始化循环变量J204
采集正在工作台上扫描的对象或患者的投影视图 206
执行测试以确定是否确定这次采集的工作台的位置 208
如果没有位置要存储,则递增循环变量并存储所采集的视图 210
与相应的采集的视图一起存储位置,并重新初始化循环变量 212
执行测量以确定扫描是否结束 214
停止工作台 216
选择用于图像重构的平面 218
使用所存储的工作台位置确定所存储的视图的X-射线管和检测器相对于所选择的图像重构平面的位置 220
利用所确定和/或插值的X-射线管和检测器位置和所存储的视图,执行滤波和反向投影以重构对象或患者在重构平面上的图像222
流程图 300
选择动态螺旋扫描类型 302
根据动态扫描的参数开始工作台的运动,并初始化循环变量J304
采集正在工作台上扫描的对象或患者的投影视图 306
使用当前的机架位置确定选择的图像位置的中心视图 308
执行测试以确定是否确定这次采集的工作台的位置 310
如果没有位置要存储,则递增循环变量并存储所采集的视图 312
与相应的采集的视图一起存储位置 314
采集对象的另一投影视图 316
停止工作台 318
确定最后的螺旋权重 320
使用所存储的工作台位置确定所存储的视图的X-射线管和检测器相对于所选择的图像重构平面的位置 322
对加权的视图执行滤波和反向投影以重构对象在重构平面上的图像 324
Claims (8)
1.一种产生对象的图像的方法,包括:
利用扫描成像系统动态地螺旋地扫描在运动工作台上的对象;
采集并存储对象的投影视图,并仅对一些所采集的投影视图采集并存储相应的所确定或所估计的工作台位置;
选择用于对象的图像的重构的平面;
利用所存储的工作台位置来确定可应用于所存储的投影视图的几何变量;和
利用该几何变量对所存储的投影视图进行滤波和反向投影以重构在重构平面上的对象的图像。
2.根据权利要求1所述的方法,其中扫描成像系统是计算机断层成像系统。
3.根据权利要求1所述的方法,其中所述利用所存储的工作台位置来确定可应用于所存储的投影视图的几何变量包括利用插值来估计缺少相应的所确定或估计的工作台位置的所存储的投影视图的工作台位置。
4.根据权利要求1所述的方法,其中所述几何变量包括X-射线管和检测器相对于图像重构平面的位置。
5.根据权利要求4所述的方法,其中扫描成像系统是具有旋转机架的计算机断层成像系统,所述方法进一步包括:
利用投影视图的机架位置确定投影视图的所选择的图像位置的中心视图;
确定所选择的图像位置的每个投影视图的权重;
使用每个投影视图的所确定的权重确定最后的螺旋权重;和
利用所确定的最后螺旋权重对所存储的投影视图进行加权;
以及进一步其中对所存储的投影视图进行滤波和反向投影包括对所加权的存储的投影视图进行滤波和反向投影。
6.一种成像设备,该成像设备被构造成:
用于动态地螺旋地扫描在运动工作台上的对象的装置;
用于采集并存储对象的投影视图的装置,和用于仅对一些所采集的投影视图存储相应的确定的或估计的工作台位置的装置;
用于利用所存储的工作台位置来确定可应用于所存储的投影视图的几何变量的装置;以及
用于利用该几何变量对所存储的投影视图进行滤波和反向投影以重构在所选择的重构平面上的对象的图像的装置。
7.根据权利要求6所述的设备,其中所述设备进一步包括用于利用插值来估计缺少相应的所确定或估计的工作台位置的所存储的投影视图的工作台位置的装置。
8.根据权利要求6所述的设备,其中进一步包括X-射线管和检测器,以及用于定位所述X-射线管和所述检测器相对于图像重构平面的位置的装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/680,688 US6977984B2 (en) | 2003-10-07 | 2003-10-07 | Methods and apparatus for dynamical helical scanned image production |
| US10/680688 | 2003-10-07 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1636513A CN1636513A (zh) | 2005-07-13 |
| CN100496400C true CN100496400C (zh) | 2009-06-10 |
Family
ID=34394391
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB200410085253XA Expired - Fee Related CN100496400C (zh) | 2003-10-07 | 2004-10-08 | 动态螺旋扫描图像产生的方法和设备 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US6977984B2 (zh) |
| JP (1) | JP4576193B2 (zh) |
| CN (1) | CN100496400C (zh) |
| DE (1) | DE102004048402A1 (zh) |
| NL (1) | NL1027185C2 (zh) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006141906A (ja) * | 2004-11-25 | 2006-06-08 | Ge Medical Systems Global Technology Co Llc | 放射線撮影装置 |
| DE102005021065A1 (de) * | 2005-05-06 | 2006-11-16 | Siemens Ag | Medizinische Untersuchungseinrichtung zum Erzeugen von Untersuchungsbildern eines Objekts und zugehöriges Verfahren |
| US8232535B2 (en) | 2005-05-10 | 2012-07-31 | Tomotherapy Incorporated | System and method of treating a patient with radiation therapy |
| JP2006320523A (ja) * | 2005-05-19 | 2006-11-30 | Ge Medical Systems Global Technology Co Llc | シャトルモードヘリカルスキャンのスキャンパラメータ設定方法およびx線ct装置 |
| EP1906826A4 (en) | 2005-07-22 | 2009-10-21 | Tomotherapy Inc | SYSTEM AND METHOD FOR DETECTING A RESPIRATORY CYCLE IN A PATIENT RECEIVING RADIOTHERAPY TREATMENT |
| US8442287B2 (en) | 2005-07-22 | 2013-05-14 | Tomotherapy Incorporated | Method and system for evaluating quality assurance criteria in delivery of a treatment plan |
| US20090041200A1 (en) * | 2005-07-23 | 2009-02-12 | Tomotherapy Incorporated | Radiation therapy imaging and delivery utilizing coordinated motion of jaws, gantry, and couch |
| WO2007014090A2 (en) * | 2005-07-23 | 2007-02-01 | Tomotherapy Incorporated | Radiation therapy imaging and delivery utilizing coordinated motion of gantry and couch |
| JP4509903B2 (ja) * | 2005-09-27 | 2010-07-21 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | X線ct装置 |
| JP4611168B2 (ja) * | 2005-10-07 | 2011-01-12 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | 画像再構成方法、およびx線ct装置 |
| JP4639143B2 (ja) * | 2005-11-30 | 2011-02-23 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | X線ct装置およびその制御方法 |
| JP2007151849A (ja) * | 2005-12-06 | 2007-06-21 | Ge Medical Systems Global Technology Co Llc | X線ct撮影方法およびx線ct装置 |
| JP4611225B2 (ja) * | 2006-03-01 | 2011-01-12 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | X線ct装置 |
| JP2007236662A (ja) * | 2006-03-09 | 2007-09-20 | Ge Medical Systems Global Technology Co Llc | X線ct装置およびそのx線ct画像再構成方法、x線ct画像撮影方法。 |
| RU2452384C2 (ru) * | 2006-09-29 | 2012-06-10 | Конинклейке Филипс Электроникс Н.В. | Сканирование в сквозном режиме |
| DE102007021023A1 (de) * | 2007-05-04 | 2008-11-13 | Siemens Ag | Verfahren zur Bilderstellung für die Spiral-CT mit veränderlichem Pitch und CT-Gerät zur Durchführung des Verfahrens |
| US7724866B2 (en) * | 2007-06-27 | 2010-05-25 | Analogic Corporation | Method of and system for variable pitch computed tomography scanning for baggage screening |
| CN101820948A (zh) * | 2007-10-25 | 2010-09-01 | 断层放疗公司 | 用于放疗实施的运动适应性优化的系统和方法 |
| US8467497B2 (en) * | 2007-10-25 | 2013-06-18 | Tomotherapy Incorporated | System and method for motion adaptive optimization for radiation therapy delivery |
| US8284892B2 (en) * | 2008-12-22 | 2012-10-09 | General Electric Company | System and method for image reconstruction |
| US7933377B2 (en) * | 2009-06-03 | 2011-04-26 | General Electric Company | Method of CT perfusion imaging and apparatus for implementing same |
| JP6257962B2 (ja) * | 2012-09-04 | 2018-01-10 | 東芝メディカルシステムズ株式会社 | X線ct装置 |
| HK1217567A1 (zh) | 2013-02-26 | 2017-01-13 | Accuray, Inc. | 電磁致動的多葉準直器 |
| DE102013215807A1 (de) * | 2013-08-09 | 2015-02-12 | Siemens Aktiengesellschaft | Verfahren zur Spiralaufnahme mit veränderlicher Tischgeschwindigkeit bei konstantem Pitch und Computertomographiegerät zur Durchführung eines solchen Verfahrens |
| DE102015205004B4 (de) * | 2015-03-19 | 2020-07-09 | Siemens Healthcare Gmbh | Einstellen einer Tischposition eines Tomographen |
| DE102016211720A1 (de) * | 2016-06-29 | 2018-01-04 | Siemens Healthcare Gmbh | Verfahren zum Positionieren eines positionierbaren Tisches |
| US10722188B2 (en) | 2017-05-18 | 2020-07-28 | Canon Medical Systems Corporation | X-ray CT apparatus |
| US11039808B2 (en) * | 2019-02-13 | 2021-06-22 | Analogic Corporation | Scanning systems configured to inspect conveyed objects and related systems and methods |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5073911A (en) * | 1989-02-13 | 1991-12-17 | Kabushiki Kaisha Toshiba | Computerized tomographic apparatus |
Family Cites Families (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5262946A (en) * | 1988-10-20 | 1993-11-16 | Picker International, Inc. | Dynamic volume scanning for CT scanners |
| JPH04150840A (ja) * | 1990-10-15 | 1992-05-25 | Hitachi Medical Corp | 螺旋スキャンct装置 |
| US5090037A (en) | 1990-11-19 | 1992-02-18 | General Electric Company | Helical scanning computed tomography with tracking x-ray source |
| JP2933107B2 (ja) * | 1992-02-14 | 1999-08-09 | 株式会社東芝 | Ct装置 |
| JPH05317300A (ja) * | 1992-05-25 | 1993-12-03 | Toshiba Corp | 寝台位置制御装置 |
| US5224136A (en) | 1992-06-30 | 1993-06-29 | General Electric Company | Helical scanning computed tomography apparatus with constrained tracking of the x-ray source |
| US5377250A (en) * | 1992-08-07 | 1994-12-27 | General Electric Company | Reconstruction method for helical scanning computed tomography apparatus with multi-row detector array |
| EP0587334B1 (en) * | 1992-09-09 | 1999-06-30 | Picker International, Inc. | Imaging methods and apparatus |
| JP2824011B2 (ja) * | 1993-11-15 | 1998-11-11 | 株式会社日立メディコ | X線ct装置 |
| US5515409A (en) | 1994-12-22 | 1996-05-07 | General Electric Company | Helical interpolative algorithm for image reconstruction in a CT system |
| US5891030A (en) * | 1997-01-24 | 1999-04-06 | Mayo Foundation For Medical Education And Research | System for two dimensional and three dimensional imaging of tubular structures in the human body |
| US6298112B1 (en) | 1998-07-01 | 2001-10-02 | Ge Medical Systems Global Technology Co. Llc | Methods and apparatus for helical multi-frame image reconstruction in a computed tomography fluoro system including data communications over a network |
| US6038278A (en) | 1998-07-01 | 2000-03-14 | Hsieh; Jiang | Method and apparatus for helical multi-frame image reconstruction in a computed tomography fluoro system |
| US6185271B1 (en) * | 1999-02-16 | 2001-02-06 | Richard Estyn Kinsinger | Helical computed tomography with feedback scan control |
| US6597803B1 (en) | 1999-10-29 | 2003-07-22 | Ge Medical Systems Global Technology Company, Llc | Hybrid reconstruction for high pitch multi-slice helical cardiac imaging |
| US6332013B1 (en) | 1999-12-28 | 2001-12-18 | General Electric Company | Methods and apparatus for tilted helical reconstruction multislice CT |
| US6385278B1 (en) | 2000-04-28 | 2002-05-07 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for region of interest multislice CT scan |
| US6381297B1 (en) | 2000-08-15 | 2002-04-30 | Ge Medical Systems Global Technology Company, Llc | High pitch reconstruction of multislice CT scans |
| US6463117B1 (en) | 2000-11-22 | 2002-10-08 | Ge Medical Systems Global Technology Company, Llc | Methods and apparatus for tilted helical image reconstruction in CT imaging |
| US6452996B1 (en) | 2001-03-16 | 2002-09-17 | Ge Medical Systems Global Technology Company, Llc | Methods and apparatus utilizing generalized helical interpolation algorithm |
| US6421411B1 (en) | 2001-05-10 | 2002-07-16 | Ge Medical Systems Global Technology Company, Llc | Methods and apparatus for helical image artifact reduction |
| US6529576B2 (en) | 2001-06-29 | 2003-03-04 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for pitch-adaptive reconstruction in multislice helical computed tomographic systems |
| US6490334B1 (en) | 2001-06-29 | 2002-12-03 | Ge Medical Systems Global Technology Company, Llc | Methods and apparatus for high pitch helical computed tomography image reconstruction |
| US6404842B1 (en) | 2001-10-15 | 2002-06-11 | Ge Medical Systems Global Technology Company, Llc | Method and apparatus for image reconstruction in twin helical computed tomographic systems |
| US6522714B1 (en) | 2001-11-09 | 2003-02-18 | Ge Medical Systems Global Technologies Company Llc | Row-wise full helical view weighting method and apparatus for CT scanners |
| US20030171665A1 (en) | 2002-03-05 | 2003-09-11 | Jiang Hsieh | Image space correction for multi-slice helical reconstruction |
| US6600802B1 (en) | 2002-04-01 | 2003-07-29 | Ge Medical Systems Global Technology Company, Llc | Image space correction for multi-slice helical reconstruction with z-smoothing |
| EP1605825A4 (en) * | 2003-03-14 | 2008-01-23 | Univ Central Florida Res Found | EFFICIENT IMAGE RECONSTRUCTION ALGORITHM FOR SPIRAL VARIABLE SPIRAL TOMODENSITOMETRY (CT) |
-
2003
- 2003-10-07 US US10/680,688 patent/US6977984B2/en not_active Expired - Lifetime
-
2004
- 2004-10-01 DE DE102004048402A patent/DE102004048402A1/de not_active Withdrawn
- 2004-10-06 JP JP2004293833A patent/JP4576193B2/ja not_active Expired - Fee Related
- 2004-10-06 NL NL1027185A patent/NL1027185C2/nl not_active IP Right Cessation
- 2004-10-08 CN CNB200410085253XA patent/CN100496400C/zh not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5073911A (en) * | 1989-02-13 | 1991-12-17 | Kabushiki Kaisha Toshiba | Computerized tomographic apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| CN1636513A (zh) | 2005-07-13 |
| DE102004048402A1 (de) | 2005-05-19 |
| US20050074085A1 (en) | 2005-04-07 |
| NL1027185A1 (nl) | 2005-04-08 |
| US6977984B2 (en) | 2005-12-20 |
| JP2005111269A (ja) | 2005-04-28 |
| JP4576193B2 (ja) | 2010-11-04 |
| NL1027185C2 (nl) | 2006-01-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100496400C (zh) | 动态螺旋扫描图像产生的方法和设备 | |
| CN109561869B (zh) | 用于计算机断层扫描的方法和系统 | |
| CA2584900C (en) | Method and device of reconstructing an (n+1)-dimensional image function from radon data | |
| JP5198443B2 (ja) | 画像の分解能を高めるシステム及び方法 | |
| CN106232009B (zh) | 断层扫描设备和由断层扫描设备重构断层扫描图像的方法 | |
| JP5221394B2 (ja) | ラドンデータから画像関数を再構成する方法 | |
| US7236558B2 (en) | Three-dimensional image display device creating three-dimensional image directly from projection data | |
| JP5978429B2 (ja) | 医用画像処理装置、医用画像処理方法 | |
| CN103390284B (zh) | 在扩展的测量场中的ct图像重建 | |
| CN102138806B (zh) | 在扩展的测量场中计算机断层造影图像重建 | |
| US7251307B2 (en) | Fan-beam and cone-beam image reconstruction using filtered backprojection of differentiated projection data | |
| JP5727508B2 (ja) | コンピュータ断層撮影装置 | |
| JP2007512034A (ja) | 発散ビームスキャナのための画像再構成方法 | |
| JP2004065983A (ja) | 計算機式断層写真法データの加重の方法及び装置 | |
| CN107427274A (zh) | 断层扫描设备及其用于重构断层扫描图像的方法 | |
| JP6972242B2 (ja) | 高解像度スペクトルコンピュータ断層撮影撮像のためのシステムおよび方法 | |
| JP2016152916A (ja) | X線コンピュータ断層撮像装置及び医用画像処理装置 | |
| US20220375038A1 (en) | Systems and methods for computed tomography image denoising with a bias-reducing loss function | |
| JP2013513452A5 (zh) | ||
| US20050110748A1 (en) | Tomography-capable apparatus and operating method therefor | |
| CN1487478A (zh) | Ct中调节清晰度和噪声的图像回溯滤波及窗口控制滤波 | |
| JP2008529637A (ja) | 螺旋相対運動及び円錐ビーム束を用いたコンピュータ断層撮影方法 | |
| JP2002330957A (ja) | コンピュータ断層撮影画像のヘリカル行ビュー重み付け | |
| JP5180584B2 (ja) | 螺旋相対運動及び円錐ビームを用いたコンピュータ断層撮影方法 | |
| JP4571622B2 (ja) | 周期的運動をする対象のコンピュータ断層撮影法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20090610 Termination date: 20211008 |