CN100398877C - 具有附加弦节距减小量的滚链链轮 - Google Patents
具有附加弦节距减小量的滚链链轮 Download PDFInfo
- Publication number
- CN100398877C CN100398877C CNB028242890A CN02824289A CN100398877C CN 100398877 C CN100398877 C CN 100398877C CN B028242890 A CNB028242890 A CN B028242890A CN 02824289 A CN02824289 A CN 02824289A CN 100398877 C CN100398877 C CN 100398877C
- Authority
- CN
- China
- Prior art keywords
- mentioned
- roller
- sprocket wheel
- chain
- tooth
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images

























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H7/00—Gearings for conveying rotary motion by endless flexible members
- F16H7/06—Gearings for conveying rotary motion by endless flexible members with chains
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H55/00—Elements with teeth or friction surfaces for conveying motion; Worms, pulleys or sheaves for gearing mechanisms
- F16H55/02—Toothed members; Worms
- F16H55/30—Chain-wheels
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H55/00—Elements with teeth or friction surfaces for conveying motion; Worms, pulleys or sheaves for gearing mechanisms
- F16H55/02—Toothed members; Worms
- F16H55/08—Profiling
- F16H2055/086—Silent gear profiles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H57/00—General details of gearing
- F16H57/0006—Vibration-damping or noise reducing means specially adapted for gearings
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gears, Cams (AREA)
- Devices For Conveying Motion By Means Of Endless Flexible Members (AREA)
Abstract
链轮(112)在处于新的或者“制成”条件下,可包括有附加弦节距减小量。链轮弦节距Ps’相对于制成链节距Pc(或者一理论最大链轮弦节距)可有目的地减小一可选量,这里称为“附加弦节距减小量”。该附加弦节距减小量不包括由于制造公差而产生的固有弦节距减小量。由于可延长相关链滚子的咬合时间间隔,所以结合有上述附加弦节距减小量的链轮(112)适合迫切需要。这样形成的链轮(112)具有一弦节距,该弦节距相对最大理论链轮弦节距(或者链连杆节距)可减小上述最大理论链轮弦节距的大约0.5%到1%之间的数量。
Description
技术领域
本发明涉及汽车定时链技术。这里尤其是涉及一种用于汽车凸轮轴驱动领域的单向滚链链轮,其将结合最佳实施例描述。但本发明还涉及其他可减小链驱动噪音能级的链驱动系统和应用。
背景技术
用于汽车凸轮轴驱动的滚链链轮通常根据ISO(国际标准化组织)的标准606:1994(E)制造。ISO-606标准规定有短节距精度滚链和相关链轮或链轮齿的要求。
图1示出一用于ISO-606柔顺量链轮的对称齿间轮廓。上述齿间具有一连续的圆角或齿根半径Ri,如滚子就位角度α所限定的那样从齿侧(侧面)延伸到相邻齿侧。齿侧半径Rf在切点TP和上述滚子就位半径Ri正切。具有连杆节距P的链设置有和上述齿间相接触且直径为D1的滚子。该ISO链轮具有长度为P,齿根直径为D2,齿数为Z的弦节距。进一步限定上述ISO-606柔顺量链轮,上述节距圆半径PD,尖端或外侧直径OD,齿间角A(等于360°/Z)。上述最大和最小滚子就位角度α可限定为:
αmax=140°-(90°/Z);αmin=120°-(90°/Z)
参考图2,一示意性ISO-606柔顺量滚链驱动系统10在如箭头11所示的顺时针方向上旋转。上述链驱动系统10包括驱动链轮12,从动链轮14和具有多个滚子18的滚链16。上述每一链轮12、14和链16通常都符合上述ISO-606标准。
滚链16啮合并环绕在上述链轮12、14上,且具有两个在上述链轮,松弛链条20和拉紧链条22之间延伸的跨距。上述滚链16如箭头24所示张紧。通过链导向26,上述拉紧链条22可从从动链轮14导向到驱动链轮12。如图所示的第一滚子28处于驱动链轮12上12点时刻位置的初始咬合位置。第二滚子30邻接上述第二滚子28是下一个要与并为驱动链轮12咬合的滚子。
链驱动系统具有几个会产生所不希望出现噪音的元件。滚链驱动噪音的主要来源就是当滚子在咬合过程中离开上述跨距,并和链轮相碰撞时所产生的噪音。合成的冲击噪音循环往复并具有等于链咬合链轮频率的频率。冲击噪音的响度是在咬合过程中吸收冲击能量(EA)的函数。上述吸收的冲击能量和发动机速度、链质量、链以及链轮起始咬合时的速度有关。上述冲击速度由链-链轮啮合几何形状所影响,啮合齿侧压力角γ(图3)为其一因数,其中:
EA=冲击能量(N·m)
VA=滚子冲击速度(m/s)
γ=啮合齿侧压力角
n=发动机速度(RPM)
W=链质量(Kg/m)
Z=链轮齿数
A=齿间角(360°/Z)
α=滚子就位角度
P=链节距(弦节距)
推定链驱动动态的冲击能量(EA)等式通常为准静态分析模型,当链轮从上述跨距上接收滚子时,在齿侧和齿根半径的切点TP(图3)处发生滚子-链轮主动接触。
如图3所示,压力角γ由线A和线B限定,其中线A从啮合滚子28的中心引出,通过齿侧半径Rf中心,在切点TP接触到啮合齿侧,线B连接在完全就位的滚子28中心,这时滚子28定位于齿根半径D2上、以及下一咬合滚子30中心,其中滚子30在其啮合齿间仍处于齿根半径D2上。上述在图27中所列的滚子就位角α和压力角γ可由上述等式所计算。可以理解,上述角度γ在角度α最大时最小。图3中,符合ISO-606的18齿链轮12的压力角γ范围在如图27所列的12.5°到22.5°之间。
图3中当驱动链轮12在箭头11的方向上旋转时,还示出啮合路径(虚线滚子)和滚子28(实线)的主动接触位置。图3描述了一种理论情况,其中链滚子27位于链节距和链轮弦节距都等于理论节距P的最大尺寸链轮的齿根直径D2。对于该理论情况,在滚子啮合的开始就产生噪音,该噪音具有一由于滚子和齿根表面Ri相碰撞产生的径向分量FIR,和一在滚子移动为主动接触时,同一滚子28在切点TP和啮合齿侧相碰撞产生的切向分量FIT。可以认为,径向冲击首先发生,同时伴随有切向冲击。滚子冲击速度VA如图所示通过啮合齿侧切点TP,而滚子28正主动接触在该点TP上。
上述冲击能量(EA)等式仅仅计算了在咬合过程中的切向滚子冲击。实际的滚子啮合假定为具有径向和切向冲击(可以任何顺序发生),该滚子啮合不同于上述冲击能量(EA)等式。这种准静态模式应用,可用作为定向工具,进行特性分析,从而可减少切向滚子-链轮在咬合初始碰撞过程中所必须吸收的冲击能量。上述在咬合过程中的径向冲击和噪音效果都可以由冲击能量(EA)等式所计算。
在实际的条件下,由于尺寸公差,链和链轮之间的节距通常不匹配,在应用中这些零件由于磨损,这种不匹配情况更加严重。该节距失配会移动咬合冲击的点,而上述径向碰撞仍发生在齿根表面Ri,但不一定是在D2上。切向碰撞通常在点TP附近发生,但作为上述实际链-链轮节距失配的函数,这种接触爬升到齿根半径Ri的啮合边缘,或者从啮合齿侧半径Rf径向向外。
如冲击能量(EA)等式所确定的那样,减小上述啮合齿侧压力角γ就会减少滚链驱动的咬合噪音。可行但不值得推荐的是可减小上述压力角γ,在通过增大滚子就位角α以保持对称齿间轮廓时,来有效降低两齿侧压力角。这种轮廓需要磨损的链在滚子经过链轮卷折部(sprocket wrap)(下面会描述)时,更加倾斜,因此上述滚子在离开上述卷折部之前就有必要在斜坡齿侧(coast flank)上爬升。
链驱动噪音的另一个来源就是由于轴的扭矩变化和链、链轮之间尺寸误差等在零件中产生的宽频机械噪音。宽频机械噪音是在滚子经过上述链轮卷折部时,由于发生在无负载滚子和链轮齿之间的间歇振动或者振动接触造成的。尤其是,常见的链驱动系统磨损包括链轮齿面磨损和链磨损。上述链磨损是由链接合部的轴承磨损引起的,且特征为节距伸长。可以认为和ISO标准链轮咬合的磨损链仅仅具有一个滚子处于主动接触并在最大加载条件下加载。
参考图2,最大加载的主动接触一般发生在滚子进入到驱动链轮卷折部32进行啮合时。啮合滚子28如图所示处于主动接触,并在最大加载条件下加载。滚子28上的加载通常是初始咬合冲击加载和链拉紧加载。在滚子28以前,卷折部32上接下来的几个滚子处于拉紧加载,而不是渐进的降低速度。在滚子28(以及卷折部上接下来的几个滚子)的加载都可以保持这些滚子和上述链轮齿根面34实体或者硬性接触。
滚子36是驱动链轮卷折部32中进入松弛链条20之前的最后一个滚子。除了在上述齿根面34的某些点上爬升(例如径向向外),滚子36同样和驱动链轮12硬性接触。
除了滚子28和36,以及滚子28之前的几个处于链拉紧加载的滚子以外,上述驱动链轮卷折部32上的其他滚子都不会和驱动链轮12硬性接触,所以当它们环绕上述卷折部时就会相对上述链轮齿根面振动,因而就会产生所不希望的宽频机械噪音。
滚子38是驱动链轮卷折部40中进入拉紧链条22之前的最后一个滚子。滚子38和链轮14主动接触。滚子36在驱动链轮卷折部32内时,除了在齿根直径以外,链轮卷折部40内的滚子42都和从动链轮14的齿根半径14硬性接触。
众所周知,即使滚链磨损,在链轮齿之间的节距线间隙(PLC)也会促进链轮卷折部内链滚子和链轮之间的硬性接触。添加到齿间的节距线间隙量可形成有一集中在上述齿间并形成齿根直径D2一段的短弧度长度。齿根圆角半径Ri正切于上述齿侧半径Rf和齿根直径弧度段。上述齿间轮廓仍然对称,但Ri不再是从一齿侧半径到相邻齿侧半径的连续圆角半径。这样的效果就使得可以减小链驱动系统的宽频机械噪音分量。但是,链轮齿之间增加的节距线间隙不会减小滚子-链轮冲击相碰撞所引起的链驱动噪音。
弦动作量(chordal action),或者弦的升高量和降低量都是另一个影响链驱动的操作平滑性和噪音能级的重要因素,尤其是在高速的情况下。在咬合过程中,当上述链从自由跨距进入到链轮,就会产生弦动作量,其可以使得上述自由链在垂直于上述链的方向上移动,但不是在上述链和链轮的相同平面上。源自弦动作量的这种链运动就会产生构成上述咬合噪音而又令人讨厌的噪音分量,所以减少滚链驱动中固有的弦动作量是十分有益的。
图4a和4b示出18齿ISO-606柔顺量链轮的弦动作量。该链轮具有弦节距为9.525mm。弦升高量(chordal rise)通常被限定为当链轮转动过A/2角度时,链中心线的位移,其中:
弦升高量=rp-rc=rp[1-cos(180°/Z)]
其中rc是弦半径,或者从链轮中心到长度P的节弦的距离;rp是实际的理论节圆半径;Z是链轮齿数。
可以知道,短节距链相比较于具有类似节圆半径的长节距链,可设置有减小的弦动作量。图4a和4b仅仅示出驱动链轮,且假定从动链轮(未示出)也具有18齿,并与所示的驱动链轮同相。换句话说,在T=0(图4a)时,两个链轮的链轮齿中心都处于12点时钟位置。所以,在准静态条件下的这种链驱动设置就处于顶链条和拉紧链条状态,该状态下链条以统一的模式可向上、向下移动和上述弦升高量相同的距离。在T=0时,滚子46处于咬合的起始点,弦节距P水平且和拉紧链条22一致。在T=0+(A/2)时(图4b),滚子46移动到上述12点时钟位置。
对于多种链驱动,上述驱动和从动链轮具有不同的尺寸,相位也不相同。链导向26(图2)在开始可控制在拉紧跨距中的链条振动。导向链界面的几何形状也可限定自由跨距链条的长度,该链条可操作弦升高量和弦降低量。图5是图2的放大视图,其中示出的第一滚子28在啮合的起始点,第二滚子30作为和链轮12咬合的下一个滚子。在这个实例中,除了5个沿链导向26和啮合滚子28之间延伸的无支撑或“自由”的连杆节距以外,链导向26都用以控制并导向上述拉紧链条22的啮合部。在该实例中,用于拉紧链条22啮合部的这些无支撑连杆节距的长度在上述滚子28处于12点时钟位置时为水平设置。
参考图6和7,驱动链轮12顺时针旋转,以使滚子28移动到新的角度位置(A/2)+ω,其中ω是附加转动角,由准静态啮合几何结构所确定,此时滚子28完全就位而滚子30处于和链轮啮合瞬间。如图6所示,可认为滚子28就位后,在滚子30刚开始咬合时,和齿根面D2硬性接触。可假定一条直线作为从滚子28到链销中心48的链跨距,可认为环绕从销48到啮合滚子30的无支撑或“自由”跨距旋转。
这样上述弦动作量,就不会再和自由跨距水平啮合,来满足滚子的啮合形状。因为上述驱动和从动链轮都具有相同的齿数,且链轮齿均同相,所以这相比较于如图4a所述的链驱动,除了在水平路径上,弦动作量都使得拉紧链条可均匀运动。可以理解,上述直线假定仅仅在准静态模型内有效。从上述直线假定的偏移量或运动量是驱动的动力学,链控制装置,以及链驱动、链轮几何形状的函数。链导向26的定位和链界面轮廓可确定自由跨距节距的数量,在滚子咬合过程中,由于弦升高量和弦降低量而产生链动作。
最好如图7所示,假定滚子28、30在D2和链轮齿根面都硬性接触,上述弦升高量是当从初始的咬合位置移动通过上述的12点时钟位置,滚子30中心(位于上述节圆直径PD)距离拉紧跨距22路径的垂直位移。
因此,又有必要研发一种新式改进的滚链驱动系统,可满足上述需求并能克服上述缺陷,且提供更好、更多的优点。
发明内容
根据本发明的第一方面,一种单向滚链驱动系统包括具有多个齿的制成驱动链轮,具有多个齿的制成从动链轮,上述驱动链轮、从动链轮相啮合的制成滚链。上述滚链形成有链连杆节距(Pc)。上述驱动链轮和/或从动链轮通过减少上述链连杆节距(Pc)的至少0.5%但不多于1%,形成有小于上述链连杆节距(Pc)的链轮弦节距(Ps’)。
根据本发明的另一方面,上述驱动链轮和/或从动链轮通过减小上述链连杆节距(Pc)的至少0.5%但不多于1%、但小于链连杆节距(Pc)的大约1%,形成有小于上述链连杆节距(Pc)的链轮弦节距(Ps’)。
根据本发明的另一实施例,可设置有制成链轮和一相关制成滚链相结合使用。该链轮包括有多个滚子,并具有链节距Pc。上述链轮包括多个向外突出的链轮齿,并在连续的齿之间分别形成有多个齿间。每一齿间可容纳相关滚链的一个滚子。通过减小上述链连杆节距(Pc)的至少0.5%但不多于1%,链轮形成有一相对于上述相关滚链链节距Pc减小的链轮弦节距(Ps’)。
根据本发明的另一方面,链轮弦节距(Ps’)可相对链连杆节距(Pc),减小链连杆节距的大约0.2%到大约1%。
根据本发明的另一方面,设置有一种制成滚链和制成链轮的咬合间隔的延长方法。该方法包括使得链轮通过减小上述链连杆节距(Pc)的至少0.5%但不多于1%,形成有一相对于上述相关滚链的链节距Pc减小的链轮弦节距(Ps’)。
根据本发明的另一方面,上述链轮弦节距(Ps’)相对于链连杆节距(Pc),可减小超过上述链连杆节距(Pc)的大约0.2%、但小于或等于链连杆节距(Pc)的大约1%。
本发明的一个主要优点就是当使用滚链驱动系统的滚链时,链轮可显示出改进的噪音特性。
本发明的另一优点就是链轮中,滚链的滚子咬合间隔延长,从而减小了使用过程中的噪音。
本发明的另一优点就是链轮以及结合有该链轮的滚链驱动系统中,附加弦节距减少,从而延长了咬合时间间隔,这样就会从就位的滚子向处于起始咬合的啮合滚子提供更大的渐进载荷传递,从而分散了长时间的咬合冲击,有助于最小化滚子冲击所产生的噪音。
本发明进一步的目的就是根据阅读和理解下列优选实施例的详细说明,对本领域的普通技术人员更加显而易见。
附图说明
本发明采用不同的组件和组件设置,以及不同的步骤和步骤设置。这些附图仅仅是用于说明优选实施例的目的,而并不仅仅将本发明限定于此。
图1是描述ISO-606柔顺量滚链链轮齿的对称齿间轮廓;
图2是一具有ISO-606柔顺量驱动链轮,从动链轮和滚链的示意性滚链驱动系统;
图3当ISO-606柔顺量驱动链轮顺时针转动时,示出一啮合路径(虚线)和一在驱动位置的滚子(实线);
图4a示出了和18齿链轮初始咬合的滚子;
图4b示出了图4a驱动链轮顺时针旋转,直到滚子处于12点时钟位置;
图5是图2中驱动链轮的放大视图,其中滚子完全就位于齿间,而第二滚子将要和上述驱动链轮咬合;
图6示出了图5中顺时针旋转的驱动链轮,直到第二滚子和驱动链轮初始接触为止;
图7是图6的放大视图,示出在理论条件下第二滚子和驱动链轮的齿根面(径向冲击)刚刚接触;
图8描述了根据本发明具有滚链驱动链轮和从动链轮的滚链驱动系统;
图9根据本发明实施例,描述了图8中具有非对称齿间轮廓的滚链驱动链轮;
图10是图9中非对称齿间轮廓的放大视图,其中示出和链轮双点接触的滚子;
图11示出了当驱动链轮图8中顺时针旋转时,滚子的啮合路径(虚线)和完全咬合的瞬间;
图12是图8中驱动链轮的放大视图,第一滚子完全就位于齿间,而第二滚子作为从滚链的拉紧跨距所接收的下一滚子;
图13示出了图12中的驱动链轮顺时针旋转,直到第二滚子和驱动链轮开始接触;
图14是图13的放大视图,示出了双点接触的第一滚子以及和驱动链轮开始切向接触的第二滚子;
图14a描述了当图14中驱动链轮顺时针旋转时,第一和第二滚子的前进过程;
图14b是图14中顺时针旋转的驱动链轮的放大视图,该链轮可使得第二滚子提前到在12点时钟时刻位置完全咬合;
图15描述了根据本发明另一实施例的、具有非对称齿间轮廓的滚链驱动链轮;
图16是图8的部分放大视图,示出了当滚子经过上述驱动链轮卷折部时的接触前进过程;
图17是离开图16中链轮的链轮卷折部的滚子放大视图;
图18根据本发明另一实施例,描述了具有非对称齿间轮廓的滚链链轮;
图19根据本发明另一实施例,描述了具有非对称齿间轮廓的滚链链轮;
图20是结合有本发明特性的示意性任意啮合滚子的前视图;
图21是图20中链轮的放大视图,示出了结合有本发明中啮合齿侧离隙(flank relief)和齿间间隙的非对称齿间轮廓;
图21a是图21中链轮的放大视图,示出了设置有齿侧离隙和齿间间隙的倾斜齿根面;
图22是图21a中倾斜齿根面的另一实施例,其中仅仅设置有齿侧离隙;
图23描述了图9的非对称齿间轮廓,其上重叠有图21中的非对称齿间轮廓;
图24描述了当链轮顺时针旋转时,在图20该链轮中的第一滚子的咬合前进过程和相邻第二滚子的咬合过程;
图25描述了图20中具有双点接触的第一滚子、初始切向接触的第二滚子和作为驱动链轮下一啮合滚子的第三滚子的链轮;
图26描述了图25中顺时针旋转的链轮,直到在链轮的齿根面第三滚子初始啮合的瞬时为止;
图27是多个不同ISO-606柔顺量链轮尺寸的滚子就位角α和压力角γ的列表;
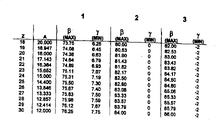
图28是不同链轮尺寸中三种不同非对称齿间轮廓(1-3)的最大贝塔角(β)和对应的最小压力角(γ)的列表;
图29-31是根据本发明描述了结合有附加弦节距减少量(CPR)的链轮。
具体实施方式
下面参考图8,滚链驱动系统110包括结合有本发明特征的驱动链轮112和从动链轮114。该滚链驱动系统110进一步包括具有多个滚子118的滚链116,该滚链同上述链轮112、114啮合并将其环绕。滚链环绕上述链轮112、114运动,沿箭头11的方向顺时针转动。
滚链116具有两个在链轮之间延伸的跨距,松弛链条120和拉紧链条122。滚链116如箭头124所示处于张紧状态。拉紧链条122的中心部可由链导向126从从动链轮114导向到驱动链轮112。所示的第一滚子128完全就位于驱动链轮112的12点时钟位置。第二滚子130和滚子128相邻,并将要和驱动链轮112咬合。
为了便于描述本发明的非对称齿轮廓,下面将仅仅对驱动链轮112描述。但是本发明的非对称齿间轮廓也可应用在从动链轮114上,以及其他例如惰轮、与平衡块转轴相连的链轮等类型的链轮上。
下面参考图9和10,链轮112包括具有啮合齿侧134的第一齿132,和具有倾斜或脱离齿侧138的第二齿136。啮合齿侧134和倾斜齿侧138配合操作以限定一具有齿根面141的齿间140。齿间140容纳有上述啮合滚子128(如虚线所示)。该啮合滚子128直径为D1,如图所示以双点接触的方式完全就位于齿间140内,这将在下面进一步描述。尤其是,当啮合滚子128完全就位于齿间内时,接触到分别沿每一链轮齿面(轴向即在正交于图面的方向)延伸的两条直线B、C。但是为了便于说明,直线A、B、C仅仅在齿间内作为接触点来参考。
啮合齿侧134具有正切于齿侧平面(flank flat)144径向外端的半径Rf,该非对称啮合齿侧半径Rf小于上述ISO-606标准所规定的RfISO半径。但是在仍然满足上述滚子咬合(啮合)和脱离几何结构的前提下,该非对称啮合齿侧半径Rf的大小应该尽可能的大。齿侧平面144的定位由角度β所限定。当滚子在点B、C处和链轮相接触时,上述平面的取向可垂直或正交于经过点B和滚子128中心的直线。
上述从点B径向向外延伸的齿侧平面长度可影响初始切向冲击和点C处的后续径向冲击之间的时间延迟。上述在初始接触点A处的初始切向冲击沿着齿侧平面144产生在链轮112和滚子128之间。可以认为滚子从在点A的初始切向接触,直到滚子以双点接触方式移动到在点B、C的完全啮合位置为止,滚子都基本和上述齿侧平面保持接触。压力角γ,上述链和链轮之间的节距失配量,以及齿侧平面的长度可各不相同,以达到初始滚子-链轮咬合时所需的初始滚子接触点A。
可以理解,齿侧(切向)接触总是首先发生,径向接触随后发生,并总是发生在点C,且无关于链节距的长度。作为比较,对于结合有单点接触(例如单线接触)的已知齿间形式(例如ISO-606中的柔顺量和非对称形式),啮合滚子在径向接触之后,必须移动到一驱动位置。所以根据压力角γ可假定啮合滚子会在齿侧半径/齿根半径切点处接触。这样上述已知单点/线齿间形式的咬合接触位置就是能“敏感”地确定产生径向冲击以及驱动(切向)冲击地点的节距。
上述啮合齿侧滚子就位角β(图9)和脱离齿侧滚子就位角β’可替换上述ISO-606滚子就位角α(如虚线所示的ISO轮廓)。如图9所述,β是由经过滚子128中心和链轮中心的线152,和也经过滚子128、点B的第二直线间所限定的角度。如图9所示,β’是经过Ri’弧段中心和链轮中心的直线,同经过Ri’弧段中心和Rf’弧段中心的第二直线所限定的角度。上述压力角γ是啮合齿侧滚子就位角β的函数。即如果β增加,则γ减小。从下列等式中可以确定最小非对称压力角,其中:
γmin=βmax-(αmax/2+γISO min)
所以,如图28中的表所述,当βmax=(αmax/2+γISO min)时,非对称压力角γmin=0。图28列出了三种不同的非对称齿间轮廓(1-3)的链轮尺寸的最大贝塔角(β)和对应的最小压力角(γ)。可以理解,减小上述啮合齿侧压力角γ,就会减小切向冲击力分量FIA(图14),从而减小构成整个在初始啮合时噪音的切向冲击噪音。
即,上述冲击力FIA是与冲击力的函数也即相关压力角γ的冲击速度的函数。当压力角γ减小,使得在开始咬合时,链和链轮之间的冲击速度也对应减小。最小压力角γ还有利于在接触切点A、B之间产生更大间隔或距离,以进一步增加或最大化咬合间隔。在优选实施例中,上述啮合齿侧压力角γ范围在大约-2.0°到大约+5°之间,从而可优化滚子和链轮之间的渐进冲击。
在所述的实施例中,在最大尺寸条件下,滚子就位角度β大于ISOαmax/2,可以调节角β,直到达到所需的啮合齿侧压力角γ。这样,上述图9中的滚子就位角β就可以使得压力角γ小于零,或某一负值。上述负压力角γ如图11所示,和图3中具有正压力角γ的ISO-606柔顺量齿轮廓相比较,如图11所示,非对称轮廓压力角γ由直线A和直线B之间的角度所限定。其中,当滚子在点B、C接触上述啮合齿侧时,直线A沿完全啮合滚子128的中心延伸,并通过点B。直线B连接上述完全就位滚子128的中心,以及如果下一咬合滚子130在啮合齿间完全咬合时也为双点接触,直线B还连接到滚子130的中心。可以认为,对于“额定”系统或对于磨损系统,理论链/链轮界面的负压力角很小就会有利于使压力角γ接近于零(0)。但是也可以调节上述啮合齿侧滚子就位角β,以便于任一啮合齿侧压力角γ的数值小于上述最小ISO压力角。
再来参考图9和10,第一齿根半径Ri正切于齿侧平面144的径向内端,并正切于倾斜齿根面146的径向外端。如图10清楚所示,最大齿根半径Ri必须等于或者小于最小滚子半径0.5D1,以在点B、C产生上述完全啮合的双点/线接触。因此,这就会在齿根半径Ri处的啮合齿侧134和完全咬合处(即双点/线接触)的滚子128之间形成有一小间隙148(图10)。根据滚子128直径D1和齿根半径Ri的所有尺寸公差条件,齿侧平面144和倾斜齿根面146分别在点B、C以内延伸,以在完全啮合处产生双点/线滚子接触。第二齿根半径Ri’在直线150处正切于倾斜齿根面146的内端。脱离齿侧半径Rf’在脱离齿侧滚子就位角β’所限定的点处正切于Ri’。上述半径Rf’的数值在上述ISO-606范围之内。
上述倾斜齿根面146是一具有有限长度的平面,该长度形成有一齿间间隙(TSC)。通过调节链节距延长ΔP的规定大小,该齿间间隙用以补偿链节距延长或者链磨损。换句话说,上述齿间间隙TSC使得可保持磨损链的滚子和链轮齿的倾斜齿根面硬性接触。另外,上述倾斜齿根面146有利于减小径向作用力,从而减小构成整个噪音的滚子径向冲击噪音。
倾斜齿根面146能够以任一角度φ倾斜,从而满足规定的链驱动几何结构和链节距延长。如图9所示,上述倾斜齿根面角度φ由经过滚子128中心、链轮中心的直线152和一也经过滚子128中心、点C的第二直线154所限定。倾斜齿根面146正交于直线154,并径向向内延伸到正切于Ri’的直线150。在所述的实施例中,倾斜齿根面角度φ优选为在大约20°到大约35°之间。
图12是图8中的放大视图,示出了第一滚子128完全双点/线接触地啮合在链轮齿轮廓的厚度和宽度上,第二滚子130作为将要和链轮112咬合的下一滚子。相比较ISO-606柔顺量驱动系统10,除了五个沿链导向126和啮合滚子128延伸的无支撑连杆节距(和除了沿从动链轮和链导向之间延伸的无支撑连杆节距)以外,链导向126可控制并导向拉紧链条122的中心部。拉紧链条122在滚子128处于12点时钟位置时为水平设置。
图13示出了链轮和滚子130啮合的瞬时,驱动链轮112顺时针旋转过(A/2)+ω时的情况。可假定一条直线作为从滚子128到链销中心156的链跨距,可认为环绕从销156到啮合滚子130的无支撑或“自由”跨距旋转。可以理解,上述直线假定仅仅在准静态模型内有效。上述的运动量(或从上述直线假定的偏移量)是驱动的动力学,链驱动、链轮几何形状的函数。
在滚子130开始咬合时,链轮接触早于上述ISO-606所对应的接触,就会减小弦升高量,并使得有利于在啮合齿侧点A上的所需压力角γ处发生初始接触。而且由于链轮转动,直到滚子130处于上述12点时刻位置时,也不会发生构成整个噪音能级的滚子130径向链轮接触。
图14是图13的放大视图,更加清晰的示出了滚子130初始咬合时的情况。在咬合之前,假定滚子128承载整个如箭头所示的拉紧链条载荷FTB+Fφ。实际上,箭头代表作用在拉紧链条上的作用力。在滚子130咬合的瞬时,产生如冲击力向量FIA所示的切向冲击。上述切向冲击不同于上述拉紧链条载荷。尤其是,冲击载荷或冲击应力都和冲击速度VA相关。可以知道在两个物体之间碰撞过程中产生的冲击,可使得较大的应力经历较短的时间间隔。由于直到链轮足够旋转,使滚子130处于12点时钟位置,也不会发生径向冲击,所以所示的径向冲击力向量FIC仅仅作为一大致向量(outline)。
图14a示出了图14中所示滚子128和130的相同滚子位置(实线),但除了相对于链轮轮廓,滚子130到达其在12点时钟位置的双点/线咬合位置时的滚子位置(虚线)。这样,由于链和链轮之间的节距失配,滚子128一定会移动到新位置。尤其是,当滚子128从开始接触到完全咬合,滚子128就会在齿间向前移动。但是,在链连接部分的小间隙也会减小滚子128所需的向前移动量。而且在开始咬合时,拉紧链条载荷就从滚子128向滚子130传递。
上述前述“渐进”咬合的非对称轮廓使得咬合间隔延长。尤其是,参考图14,点A在开始咬合时和相关的冲击力FIA切向接触。可以认为滚子130当链轮移动使滚子径向接触在点C时完全咬合的过程中,都基本和上述啮合齿侧134保持硬性接触。
图14b是图14的放大视图,示出了链轮112的旋转将滚子130提前到在12点时钟位置时处于完全咬合的瞬时。在该完全咬合的瞬时,会产生径向冲击力FIC,并可认为完成了拉紧链条载荷的传递。由于合成径向冲击力FIC,滚子130在点C的径向碰撞瞬时,也已产生FIA的切向冲击力,并不再是一个因数。切向和径向滚子-链轮碰撞之间的时间延迟(“渐进”啮合)可有效的分散长时间间隔中的冲击能量,从而减小其在咬合频率所产生的噪音。
因此可以相信,当咬合滚子130从点A的初始咬合移动到完全双点咬合位置时,本发明中非对称链轮齿轮廓可使得从完全啮合滚子128到咬合滚子130更加渐进的传递拉紧链条载荷。
再来参考图14,当滚子130从开始咬合接触点A移动到滚子128现在的咬合位置时,具有本发明非对称轮廓的弦升高量(和弦降低量)是滚子130中心从拉紧链条122路径的垂直位移。可以认为滚子130当该滚子从开始径向接触到完全咬合的过程中,都基本和上述啮合齿侧134保持硬性接触。所以如果点A、B之间的距离增大,上述弦升高量就会减小。如图14所示,链节距Pc大于链轮112弦节距Ps。
下面,参考图15,倾斜齿根面146(图10)的长度可减小为零(0),从而消除上述倾斜齿根面146,并使齿根半径Ri’在点C正切于上述齿根面和滚子128。即,Ri’在点C正切于一短平段,该短平段又正切于Ri。如果上述倾斜齿根面146得以消除,啮合齿侧压力角γ通常就处于某一正值到零之间的范围内,但并不小于零。这是由于负值γ可使弦节距减小,以使得上述滚子可离开链轮卷折部60(图16),而不干扰Rf。
图16示出了对于所有卷折部60内的滚子,接触到链轮112轮廓的滚子情况。滚子128如图所示处于完全双点咬合状态。线160示出每一滚子的接触点,以及当滚子经过上述卷折部时的接触前进(contact progression)。当上述滚子环绕上述链轮卷折部前进时,上述链轮和滚链之间的固有节距失配引起上述滚子爬升到上述倾斜侧齿侧上。由于附加有弦节距减小量,所以上述滚子爬升到上述倾斜侧齿侧的程度就会大大增加。
非常重要的是,当上述压力角γ为负值时,就需要有弦节距减小量。另外从图16和17中可以非常清楚地看出,滚子162当其离开上述卷折部60返回跨距时,就会干扰上述啮合齿侧(具有最大尺寸链轮和理论最短节距链)。即,弦节距减小量使得上述在啮合齿侧具有一间隙163的滚子162离开上述卷折部60。而且,上述减小的弦节距可增加上述咬合间隔(渐进咬合)。图16示出了在卷折部60处的滚子接触前进,还示出了小角度β’和齿间间隙TSC为何有助于保持卷折部的滚子具有“硬性”的滚子-链轮接触。
另外,可以调节脱离齿侧滚子就位角度β’(图9),使其为等于αmin/2或更小的一最大值。该减小的滚子就位角度β’当滚子离开链轮,进入跨距时,可使得更快加速间隔。当卷折部中的滚子环绕链轮运动时,该减小的滚子就位角度β’还可使在磨损链中的滚子沿上述倾斜齿侧面爬升到一小角度。
可以想到的是,可替换上述的非对称齿轮廓特征,而并不会偏离本发明中可减少噪音的上述链和链轮咬合动力学。举例来说,上述啮合非对称齿侧轮廓可为渐开线形式,脱离非对称齿侧轮廓可以是不同的渐开线形式。由于制造和/或质量控制原因,或者为了提高零件尺寸精度,非对称齿轮廓可进行细微变化。这些变换都落入这里所公开的本发明范围内。
在另一实施例中,啮合齿侧倾斜齿根面146(图9)可由一如图18所示的斜坡齿侧倾斜齿根面164所替换。上述斜坡齿侧倾斜齿根面164如所述的倾斜齿根面146以相同方式提供有一齿间间隙(TSC)。另外当链磨损时,脱离齿侧倾斜齿根面164可将滚子移动到一优选的径向向外位置。
而且,斜坡齿侧倾斜齿根面164可包括有如图19所示的啮合齿侧倾斜齿根面146。该啮合齿侧和斜坡齿侧倾斜齿根面146、164彼此协作,通过上述相同的方式,提供有齿间间隙(TSC)。
下面参考图20,可将图9,15,18和19中的任一个非对称齿轮廓结合到随机啮合滚链链轮300中。该所示的链轮300是18齿链轮。但是链轮300根据需要也可有更多或者更少的齿数。链轮300包括一第一组任意定位链轮齿302,其中每一个都结合有图9,15,18和19所示齿侧平面144的轮廓。而且,链轮齿302还可结合有一个或两个或者没有设置如图9,15,18和19所示的倾斜齿根面146,164。剩下的链轮齿304(链轮齿1、3、4、9、13、14和16)可环绕链轮随机定位,并可结合有一不同于第一组链轮齿302轮廓的齿轮廓。如下进一步所述,上述第一和第二组链轮齿302、304可配合以减小链驱动系统噪音,使其被减小在单独使用任意齿轮廓所产生的噪音以下。
图21描述了一个链轮齿304的示意性齿轮廓。相邻齿的啮合齿侧306和斜坡或脱离齿侧308相互配合以限定一具有齿根面311的齿间310。该齿间310可收容一啮合滚子314(如虚线所示)。该啮合滚子314具有一滚子直径D1,并单点接触(线)地完全就位于齿间310内。如图21a清楚所示,啮合滚子314在开始咬合时并不接触啮合齿侧306,而是直接从上述跨距移动到完全咬合齿根接触在一倾斜齿根面316上的接触点C’上。该点C’在朝向啮合齿侧306的方向上,位于接触点C的径向外侧。接触点C’是一沿每一链轮齿面(即在正交于图面的方向)轴向延伸的滚子/齿接触线。这样,在滚子314和啮合齿侧306之间就限定有间隙321。
如图21和21a所示,第一或啮合齿根半径Ri在直线319处正切于倾斜齿根面316,并还可以角度β正切于Rf。由于滚子/齿侧不会接触齿轮廓304,所以角度β不需要在滚子开始咬合时进行特定。应该注意的是对于齿轮廓304,Ri可等于ISO-606齿根半径。
上述倾斜齿根面从点C到其在直线319的径向外端的长度可由齿侧偏移量所确定。因为该偏移量需要保证滚子在整个设计寿命中,对于任意链节距延长(磨损),都不会啮合齿根接触。在优选实施例中,齿侧偏移量323范围在大约0.025到0.13mm之间。齿侧偏移量323是倾斜齿根面316的延伸。该齿根面316可相关倾斜齿根面146以相同的方式提供齿间间隙(TSC)。
如上所述,通过调整链节距延长的规定大小,齿间间隙用以补偿链节距延长或者链磨损。换句话说,上述齿间间隙TSC使得可保持磨损链的滚子和链轮齿的倾斜齿根面硬性接触。另外,上述倾斜齿根面316有利于间隙径向作用力,从而减小构成整个噪音能级的滚子径向冲击噪音。
倾斜齿根面316能够以任一角度φ倾斜,从而满足规定链驱动几何结构和链节距延长。上述倾斜齿根面角度φ由经过滚子314中心、链轮中心的直线320和一也经过滚子314中心、点C的第二直线322所限定。倾斜齿根面316正交于直线322,并径向向内延伸到正切于Ri’的直线318。在所述的实施例中,倾斜齿根面角度φ优选为在大约20°到大约35°之间。
图22示出了齿轮廓304的另一实施例,其中没有设置有齿间间隙TSC。即,从直线318到直线322的倾斜齿根面没有设置平面部分。这样齿304从点C到在齿间啮合侧外侧或尖端直径的轮廓就基本上等同于图15所示的齿轮廓。上述倾斜齿根面316从直线322到直线319的剩余平面部分323的功能仅仅是用以提供上述的啮合齿侧偏移量。
可以理解,从直线318到直线322的啮合齿侧倾斜齿根面的部分可由图18中的斜坡齿侧倾斜齿根面164所替换。即,齿轮廓304可基本等同于图18所示链轮112从接触点C到斜坡齿侧138外径的齿轮廓。斜坡齿侧倾斜齿根面164以和倾斜齿根面316相同的方式提供一齿间间隙(TSC)。另外,当链磨损时,斜坡齿侧倾斜齿根面可将滚子移动到一优选径向向外位置。而且,上述斜坡齿侧倾斜齿根面164可包括有和图19所示的相同啮合齿侧倾斜齿根面316(倾斜面164包括上述倾斜面146)。这样,齿轮廓304还可基本等同于图19所示链轮112从接触点C到斜坡齿侧138外径的齿轮廓。
除了具有最短节距(最短的理论节距)和最大尺寸链轮的链所限定的理论条件以外,节距失配都固有在链/链轮界面内。该理论条件可限定有一相关链和链轮的节距失配公差范围的下限(零,或没有节距失配)。当最长“制成”链用于最小尺寸链轮时,或者换句话说,链轮具有最小轮廓时,还可限定有另一下限。该下限会导致最大量的节距失配。该节距失配范围由零件特征的公差所确定。
对于齿轮廓302,在点A的初始切向接触和在点B、C完全就位接触之间,额外的节距失配可用以产生更大的时间延迟,或者“渐进”咬合。可以理解使初始接触爬升到上述啮合齿侧的齿侧平面144,可提高齿轮廓302的渐进接触。而因为齿轮廓304没有切向接触,因此对于每一齿轮廓302、304,可改变初始滚子-链轮接触的点和节奏,所以就会减小咬合频率噪音。
上述链轮弦节距应短于上述弦节距,以便于上述“渐进”滚子-齿接触。另外当滚子轮廓上述链轮卷折部返回到跨距时,弦节距减小量还可提供滚子-齿侧的间隙。
图29部分描述了非对称链轮112包括多个相同轮廓的齿132。为了便于理解附加弦节距减小量(CPR)的特征,连续的齿132由后缀为a、b...的参考标号132a、132b、132c所指定。链轮112沿方向11顺时针旋转,每一齿132都包括啮合齿侧134和脱离齿侧138。在每一齿的啮合齿侧134和下一或连续齿132的脱离齿侧之间限定有一间隙140。包括滚子128、130以及连杆(未示出)的滚链和链轮112相啮合,滚子128、130完全就位于各自的齿间140内。
如上所述,滚链包括一由连续滚子128、130中心之间距离所限定的新的或所制(as-built)的链节距Pc。这里,当链轮处于新的或“制成”(as-manufactured)条件下,如果两个滚子都和链轮完全咬合主动接触就位,连续滚子中心之间的直线距离就是链轮节距。这样对于链轮112,如图29所示,当两个滚子在点B、C啮合到各自的啮合齿侧134上时,链轮节距Ps就为滚子128、130中心之间的直线距离。在图29所示的实施例中,链轮112包括一弦节距Ps,由于制造公差所以相对上述弦节距Pc大约减少了0.1%。这样如图29所示,滚子128和齿132b的啮合齿侧134进行双点主动接触,从而就位。即,上述滚子和齿132b啮合齿侧134上的点B、C相啮合。下一啮合滚子130在点初始接触点A处,刚刚啮合到齿132a的啮合齿侧134上。但如下所述,点A非常靠近点B,这是因为链轮弦节距Ps等于上述链连杆节距Pc。这样即使滚子130刚刚和链轮112相啮合,滚子130也会和齿132a的啮合齿侧134的点B、C相双点接触就位。所以本领域的普通技术人员就会认识到渐进冲击,即咬合时间间隔的延伸,并不会对图29中的实施例有任何影响。换句话说,即使滚子130在点B、C处双点主动接触不良,也会立即和链轮112啮合。这样,在CA处所示的弦动作量(弦升高量和弦降低量)就可大于所需的弦动作量。
图30部分描述了除了限定有包括附加弦节距减小量(CPR)以外、等同于链轮112的链轮112’,在新的或“制成”(as-manufactured)条件下,即链轮弦节距Ps’相比较上述制成链节距Pc定向减小一选定量,在这里称作为“附加弦节距减小量”。如下所述,该定向的附加弦节距减小量是不包括上述由于制造公差而产生的固有弦节距减小量。由于咬合的时间间隔延长,即改善了下一和链轮112’咬合的滚子130的渐进冲击,所以根据本发明如图30所示的附加弦节距减小量适合迫切需要。这通过比较图29和30变得非常明显。在图30中,可以看出滚子128完全啮合并和齿132b的啮合齿侧134双点主动接触就位,即,滚子128和点B、C都接触。而下一咬合滚子130刚刚和链轮112’啮合、还没有完全双点接触就位。上述滚子130在点A处和啮合齿侧134开始接触,由于本发明中的附加弦节距减小量,上述点A和点B彼此径向向外间隔。所以滚子130仅仅基于链轮112’的进一步旋转,主动接触到点B、点C而就位。如上所述,该滚子30在点A的开始接触和滚子在点B、C的后续啮合之间的延迟就是一种迫切所需的渐进冲击或者咬合时间间隔的延长。
通过比较图29和30,初始接触点A从链轮112’径向向外的这种运动可相比较于链轮112而显而易见。而且进一步对比图29和30可示出,相比较链轮112的弦动作量CA,使用包括有附加弦节距减小量的链轮112’,还可进一步减小上述弦升高量和弦降低量动作CA’。
附加弦节距减小量的优选量最好参考图31确定。这里,链轮112可结合在点B、C双点接触而完全就位于各自啮合齿侧134的滚子128、130进行描述。如上所述,链轮112没有附加弦节距减小量。直线Ps1基于标准最大“过约束”公差(over-pin tolerance),指示一最大弦节距。而直线Ps2则基于标准最小“过约束”公差,指示一最小弦节距。尤其是,直线Ps2指示一相比较上述最大弦节距Ps1、由于制造公差而产生大约为0.2%的弦节距减小量。这样本领域普通技术人员会认识到上述链轮弦节Ps1、Ps2代表没有附加弦节距减小量的链轮112的最大和最小链轮弦节距尺寸。换句话说,没有附加弦节距减小量的链轮由于制造公差而至多具有0.2%如直线Ps2所示的弦节距减小量。
继续参考图31,直线Ps3基于具有1%附加弦节距减小量的链轮最大“过约束”公差,可指示上述最大链轮弦节距。而直线Ps4则基于具有1%附加弦节距减小量的链轮最小“过约束”公差,可指示上述最小弦节距。换句话说,对于没有附加弦节距减小量的链轮112,直线Ps3所指示的上述减小的链轮弦节距代表最大可能链轮弦节距Ps1的1%减小量。而且,对于没有附加弦节距减小量的链轮112,直线Ps4所指示的上述减小的链轮弦节距代表最小弦节距Ps2的1%减小量。
可以优选的是,对于没有附加弦节距减小量的链轮(等于上述在用链连杆节距Pc),根据本发明形成的链轮112’相对于上述最大弦节距Ps1,可以包括不多于1%附加弦节距减小量。如图29所示的链轮112没有附加弦节距减小量,但由于制造公差,具有大约0.1%的额定弦节距减小量。即,链轮112的弦节距将落入在如图31所示的弦节距Ps1和Ps2之间。如图30所示的链轮112’根据本发明形成并相对于图29中的链轮112,可结合有0.5%的附加弦节距减小量。
本发明中结合有附加弦节距减小量的链轮112’可以是一包括同一规定非对称齿轮廓的非对称链轮。根据本发明形成的链轮轮齿可以设置有这里所述的任意非对称轮廓。而且,链轮112’可是一如上所述的随机非对称链轮300,并包括多个在单一链轮上的不同非对称齿轮廓。根据本发明结合有附加弦节距减小量的链轮还可以是一驱动链轮或者是从动链轮,根据本发明的滚链驱动系统可以包括一接合有根据本发明的附加弦节距减小量的驱动链轮和/或从动链轮。
最后,应该注意的是,尽管这里所述的非对称齿轮廓使得上述滚子128、130双点接触就位,但也可以考虑其他的设置。尤其是,结合有单点就位非对称齿轮廓的链轮也可具有本发明中的附加弦节距减小量。举例来说,美国专利No.5,876,295就公开有附加非对称齿轮廓和包括本发明中弦节距减小量的链轮。所以美国专利No.5,876,295作为参考结合在这里。在美国专利No.5,921,878和5,993,344中还公开有用于本发明中链轮上的其他非对称齿轮廓。这些专利公开都作为参考结合在这里。
齿轮廓302的上述渐进滚子接触可进一步提供一小于ISO-606标准的链轮齿压力角γ。可以考虑压力角γ为等于或非常接近于零(0),或者为负的压力角。
图23描述了重叠在上述齿轮廓302(虚线)上的齿轮廓304。所示的啮合滚子沿齿轮廓302的啮合齿侧,初始切向接触在点A处。上述啮合滚子将保持和上述啮合齿侧接触,并直到完全咬合,就位于如图9所示的点B、C。齿轮廓304重叠在齿轮廓302上,示出啮合滚子在齿轮廓304的倾斜齿根面上仅仅具有径向接触(参考图21a和22),且和齿轮廓304没有切向接触。
由于上述滚子没有接触上述啮合齿侧,所以齿轮廓304的压力角γ在滚子开始咬合时,并没有起什么作用。上述所示齿轮廓302的压力角γ302为一负值。这样γmin可以为一小的负值,γmax可以为一数值,该数值等于某一小于ISO-606最小压力角γ的数值。这样链轮300(图20)齿轮廓302的初始滚子-链轮接触就产生在点A处,随后完全啮合接触在点B、C处。如上所述,链轮300结合有或者没结合有附加弦节距减小量,并也可具有或者不具有齿间间隙(TSC)。
图24示出了滚子342从初始接触在点A(虚线)到双点接触而完全就位在链轮齿302上(实线)的啮合路径,以及滚子314和随机啮合链轮300的相邻链轮齿304相啮合的啮合路径。在滚子314的初始咬合时,在均分链载荷的齿304上产生小部分链载荷传递。但齿302继续承载大部分上述的链载荷,直到啮合滚子通过齿侧接触咬合另一齿302为止。参考图24,指示出了上述齿302从在点A处的初始接触到在点B、C处的完全啮合接触所产生的“渐进”量。
图25和26描述了上述齿轮廓302、304之间的咬合延迟。尤其是,如图25所示,链轮300具有另一和链轮齿双点接触而完全就位的滚子344,上述链轮齿具有齿轮廓302。所示的滚子342正处于初始切向接触在同样具有齿轮廓302的第二链轮齿的点A处的瞬时。滚子314为跨距中下一滚子,并和具有齿轮廓304的链轮齿相咬合。链轮300旋转滚子342经过一角度τ,从而从其在点A的初始接触位置移动到在一12点时钟位置的、和齿轮廓302双点接触的完全咬合就位位置。
参考图26,图25中链轮300顺时针旋转,直到滚子314和齿轮廓304开始咬合。链轮300旋转经过一小角度k,以使得滚子314就位于上述的12点时钟位置。这样链轮300就旋转上述滚子经过一额外角度τ-k,从而使其完全就位于上述齿轮廓302上。
再来参考图20,两组齿轮廓302、304以随机模式设置,以便于通过改变上述滚子-链轮接触的点和节奏来变换上述咬合冲击频率。但是这两组齿轮廓302、304可设置为不同的随机模式。而且还可以考虑上述两组齿轮廓302、304也可设置为多组同等工作的规定模式。在上述所有的情况下,链轮上两组不同齿轮廓的设置都会提供一种分散在正常情况下由同一链轮齿形所引发咬合频率冲击噪音的方法。可通过变换上述初始滚子-链轮接触的点和节奏,来减小这种咬合频率噪音。
曲柄轴链轮,这种在链驱动中最小的链轮,通常是主要的噪音来源。而常用的大型从动凸轮轴链轮也易于产生噪音,只不过是程度小于上述曲柄轴链轮而已。对于平衡轴链轮和泵用链轮,从动链轮尤其是其尺寸接近于或者小于驱动链轮时,从动链轮就会成为主要的噪音发生器。这样,本发明的特征就可以应用于凸轮轴或者其他从动链轮中。
可以理解,变换图20-26中的齿轮廓特征,并不会偏离上述本发明中用以减小噪音的链和链轮咬合动力学。举例来说,啮合非对称齿侧轮廓可以是渐开线形式,脱离非对称齿侧轮廓可以是另一种不同的渐开线形式。出于制造和/或质量控制原因,或者为了提高零件的尺寸精度,对这些轮廓的细微变化都是允许的。
上面,参考优选实施例,已经描述了本发明。非常明显的是,根据阅读和理解说明书和本发明,可以进行多种的修改,而且这些修改都落入到随后权利要求书以及等效要求的范围之内。
Claims (16)
1.一种单向滚链驱动系统包括:
具有多个齿的制成的驱动链轮;
具有多个齿的制成的从动链轮;
与上述驱动链轮、从动链轮相啮合的所制的滚链,上述滚链形成有链连杆节距(Pc),上述驱动链轮和/或从动链轮通过减小上述链连杆节距(Pc)的至少0.5%但不多于1%,形成有小于上述链连杆节距(Pc)的链轮弦节距(Ps’)。
2.如权利要求1所述的单向滚链驱动系统,其特征在于,上述驱动链轮和从动链轮中的至少一个包括多个每一都具有非对称轮廓的齿。
3.如权利要求2所述的单向滚链驱动系统,其特征在于,上述驱动链轮和从动链轮中的至少一个都包括第一和第二不同非对称齿轮廓。
4.如权利要求3所述的单向滚链驱动系统,其特征在于,上述第一和第二不同非对称齿轮廓可随机设置在上述至少一个链轮上。
5.如权利要求2所述的单向滚链驱动系统,其特征在于,上述多个齿中的每一个都包括一能够以单点主动接触方式在一完全咬合位置啮合上述滚链滚子的啮合齿侧。
6.如权利要求2所述的单向滚链驱动系统,其特征在于,上述多个齿中的每一个都包括一能够以双点主动接触方式在一完全咬合位置啮合上述滚链滚子的啮合齿侧。
7.如权利要求2所述的单向滚链驱动系统,其特征在于,在上述齿之间形成有齿间,上述齿间形成有一啮合齿侧压力角,范围在大约-2°到大约+5°之间。
8.一种适于和相关所制的滚链结合使用的制成的链轮,上述滚链包括多个滚子,并具有一链节距Pc,上述链轮包括:
多个向外突出的链轮齿,并在连续的齿之间分别形成有多个齿间,每一齿间可容纳相关滚链的一个滚子,通过减小上述链连杆节距Pc的至少0.5%但不多于1%,链轮形成有一相对于上述相关滚链的链节距Pc减小的链轮弦节距Ps’。
9.如权利要求8所述的链轮,其特征在于,上述齿间为非对称齿间。
10.如权利要求9所述的链轮,其特征在于,上述齿间形成有一啮合齿侧压力角,范围在大约-2°到大约+5°之间。
11.如权利要求8所述的链轮,其特征在于,上述多个链轮齿均为非对称齿,且每一都包括一啮合齿侧和一脱离齿侧,上述多个链轮齿的每一啮合齿侧都能够以单点主动接触的方式啮合上述相关滚链的相关滚子。
12.如权利要求8所述的链轮,其特征在于,上述多个链轮齿均为非对称齿,且每一都包括一啮合齿侧和一脱离齿侧,上述每一齿的啮合齿侧相对于上述相关滚链的相关滚子,都被尺寸精确化和整合,以使得当相关滚子完全咬合在一齿间内时,上述啮合齿侧能够在第一滚子就位点(B)和第二滚子就位点(C)以双点主动接触的方式啮合上述相关滚子。
13.如权利要求12所述的链轮,其特征在于,上述减小的链轮弦节距Ps’使得上述相关滚链的相关滚子在从所述第一滚子就位点(B)和第二滚子就位点(C)径向向外的初始接触点(A)处和上述齿的啮合齿侧初始接触,其中上述相关滚子接触初始接触点(A)和就位于第一滚子就位点(B)和第二滚子就位点(C)之间的时间得以延长。
14.如权利要求8所述的链轮,其特征在于,上述多个链轮齿为具有至少两种随机设置在上述链轮上的不同轮廓非对称齿。
15.一种所制的滚链和制成的链轮的咬合间隔的延长方法,该方法包括:
使得链轮通过减小上述链连杆节距(Pc)的至少0.5%但不多于1%,形成有一相对于上述相关滚链的链节距Pc减小的链轮弦节距(Ps’)。
16.如权利要求15所述的方法,进一步包括:限定上述链轮,使得在上述连续齿之间形成有齿间,上述齿间形成有一啮合齿侧压力角,范围在大约-2°到大约+5°之间。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/004,544 | 2001-12-04 | ||
| US10/004,544 US6761657B2 (en) | 1996-12-19 | 2001-12-04 | Roller chain sprocket with added chordal pitch reduction |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1678846A CN1678846A (zh) | 2005-10-05 |
| CN100398877C true CN100398877C (zh) | 2008-07-02 |
Family
ID=21711297
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNB028242890A Expired - Fee Related CN100398877C (zh) | 2001-12-04 | 2002-12-03 | 具有附加弦节距减小量的滚链链轮 |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US6761657B2 (zh) |
| EP (1) | EP1451489B1 (zh) |
| JP (1) | JP2005511983A (zh) |
| CN (1) | CN100398877C (zh) |
| AU (1) | AU2002357052A1 (zh) |
| BR (1) | BR0214645B1 (zh) |
| CA (1) | CA2468973C (zh) |
| MX (1) | MXPA04005220A (zh) |
| WO (1) | WO2003048604A2 (zh) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7416500B2 (en) * | 1996-12-19 | 2008-08-26 | Cloyes Gear And Products, Inc. | Random engagement roller chain sprocket and timing chain system including same |
| US6761657B2 (en) * | 1996-12-19 | 2004-07-13 | Cloyes Gear And Products, Inc. | Roller chain sprocket with added chordal pitch reduction |
| CN100335815C (zh) * | 2004-09-15 | 2007-09-05 | 山东大学 | 不等节距高速传动齿形链和链轮 |
| US7740555B2 (en) * | 2005-10-14 | 2010-06-22 | Borgwarner Inc. | Sprocket tooth profile for a roller or bush chain |
| DE202006010311U1 (de) * | 2006-06-30 | 2006-10-12 | Schaeffler Kg | Rotationsscheibe |
| DE102006034364B4 (de) | 2006-07-25 | 2021-07-29 | JOH. WINKLHOFER & SÖHNE GMBH & Co. KG | Kettenrad mit alternierenden Teilungsabständen |
| JP5492074B2 (ja) * | 2007-05-11 | 2014-05-14 | クロイズ ギア アンド プロダクツ インコーポレイテッド | 周波数変調噛合を用いた逆歯チェーンスプロケット |
| JP4235242B1 (ja) * | 2007-12-26 | 2009-03-11 | 株式会社椿本チエイン | タイミングチェーンドライブ装置 |
| KR101649772B1 (ko) * | 2009-02-06 | 2016-08-19 | 섀플러 테크놀로지스 아게 운트 코. 카게 | 랜덤 롤러 체인 스프로켓 및 스프로켓의 제조 방법 |
| US8944945B2 (en) * | 2010-04-14 | 2015-02-03 | Richard J. Kilshaw | Chain tensioner |
| AT509479B1 (de) * | 2010-05-03 | 2011-09-15 | Nagel Edmund F | Gekapseltes fahrrad-stufenlosgetriebe |
| US9033833B2 (en) | 2011-01-28 | 2015-05-19 | Paha Designs, Llc | Gear transmission and derailleur system |
| US10207772B2 (en) | 2011-01-28 | 2019-02-19 | Paha Designs, Llc | Gear transmission and derailleur system |
| US9327792B2 (en) | 2011-01-28 | 2016-05-03 | Paha Designs, Llc | Gear transmission and derailleur system |
| JP2013096447A (ja) * | 2011-10-28 | 2013-05-20 | Tsubakimoto Chain Co | スプロケットおよびチェーン伝動装置 |
| US9062758B2 (en) * | 2011-12-06 | 2015-06-23 | Sram, Llc | Chainring |
| US9182027B2 (en) * | 2011-12-06 | 2015-11-10 | Sram, Llc | Chainring |
| US20130345005A1 (en) * | 2012-06-21 | 2013-12-26 | Tai-Her Yang | Anti-Detachment Chainwheel having Forced Recessed Face at Chain Tooth Root Portion |
| US20130345006A1 (en) * | 2012-06-21 | 2013-12-26 | Tai-Her Yang | Chainwheel Enabling Positive Rotational Transmission and Reverse Rotational Sliding Features |
| DE102013009492B4 (de) | 2013-06-05 | 2023-10-19 | Sram Deutschland Gmbh | Kettenring |
| US10000256B2 (en) * | 2014-01-23 | 2018-06-19 | Shimano Inc. | Bicycle sprocket |
| CN103775612A (zh) * | 2014-01-24 | 2014-05-07 | 南通四方冷链装备股份有限公司 | 一种转笼链轮块 |
| US9394986B2 (en) * | 2014-02-10 | 2016-07-19 | Wolf Tooth Components, LLC | Sprocket |
| US9581230B2 (en) | 2014-02-10 | 2017-02-28 | Wolf Tooth Components, LLC | Sprocket |
| US9581229B2 (en) | 2014-02-10 | 2017-02-28 | Wolf Tooth Components, LLC | Sprocket |
| US9394987B2 (en) * | 2014-02-10 | 2016-07-19 | Wolf Tooth Components, LLC | Sprocket |
| US9669899B2 (en) * | 2014-02-27 | 2017-06-06 | Eko Sport, Inc. | Alternating tooth chain ring |
| US9625027B2 (en) | 2014-04-08 | 2017-04-18 | Wolf Tooth Components, LLC | Sprocket |
| US9404565B2 (en) * | 2014-04-08 | 2016-08-02 | Wolf Tooth Components, LLC | Sprocket |
| US9581231B2 (en) | 2014-04-08 | 2017-02-28 | Wolf Tooth Components, LLC | Sprocket |
| US10451166B2 (en) | 2015-04-13 | 2019-10-22 | Eko Sport, Inc. | Chain ring with teeth oppositely laterally engaging a drive chain |
| US10703441B2 (en) | 2015-07-03 | 2020-07-07 | Sram Deutschland Gmbh | Drive arrangement for a bicycle |
| DE102015008662A1 (de) * | 2015-07-03 | 2017-01-05 | Sram Deutschland Gmbh | Einzelkettenrad für eine Fahrradvorderkurbelanordnung |
| DE212015000179U1 (de) * | 2015-08-25 | 2017-02-13 | MIRANDA & IRMÃO, LDa | Getriebesystem und seine Verwendung |
| JP2018001773A (ja) * | 2016-06-27 | 2018-01-11 | 株式会社シマノ | 自転車用スプロケット、及び自転車用スプロケット組立体 |
| JP7011166B2 (ja) * | 2018-03-30 | 2022-01-26 | 株式会社椿本チエイン | スプロケット及び伝動機構 |
| US10625985B1 (en) | 2019-01-25 | 2020-04-21 | Kone Corporation | Pedestrian conveyor mass damper to reduce step vibration |
| JP7292087B2 (ja) * | 2019-04-16 | 2023-06-16 | 大同工業株式会社 | スプロケット |
| CN110410274B (zh) * | 2019-08-16 | 2021-10-22 | 长沙理工大学 | 一种联排垂直轴风力发电装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3194609A (en) * | 1964-03-30 | 1965-07-13 | Thurlow Lloyd | Sprocket and chain drive |
| US3448629A (en) * | 1968-06-20 | 1969-06-10 | Amsted Ind Inc | Chain and sprocket drive |
| WO1998000656A1 (en) * | 1996-07-03 | 1998-01-08 | Cloyes Gear And Products, Inc. | Roller chain drive system having improved noise characteristics |
| WO1998004848A2 (en) * | 1996-07-25 | 1998-02-05 | Cloyes Gear And Products, Inc. | Random engagement roller chain sprocket having improved noise characteristics |
| WO1998029673A2 (en) * | 1996-12-19 | 1998-07-09 | Cloyes Gear And Products, Inc. | Random engagement roller chain sprocket |
| US6416436B1 (en) * | 1999-07-22 | 2002-07-09 | Tsubakimoto Chain Co. | Silent chain power transmitting device |
| US20020132689A1 (en) * | 1996-12-19 | 2002-09-19 | Young James D. | Roller chain sprocket with added chordal pitch reduction |
Family Cites Families (106)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US320734A (en) | 1885-06-23 | Belt-gearing | ||
| US601333A (en) | 1898-03-29 | James barrett | ||
| US536813A (en) | 1895-04-02 | Sprocket-wheel | ||
| US698991A (en) | 1901-04-13 | 1902-04-29 | Morse Chain Co | Chain-wheel. |
| US717976A (en) | 1901-11-07 | 1903-01-06 | Link Belt Engineering Company | Sprocket-wheel for drive-chains. |
| US984509A (en) | 1909-06-12 | 1911-02-14 | Sam A Crowder | Sprocket driving mechanism. |
| US1630313A (en) | 1925-04-30 | 1927-05-31 | American Manganese Steel Co | Sprocket wheel |
| US1808369A (en) | 1926-06-21 | 1931-06-02 | Celotex Company | Sprocket |
| FR851099A (fr) | 1939-03-02 | 1940-01-02 | Chaîne formant levier pour bicyclettes et autres applications | |
| US2259937A (en) | 1940-02-05 | 1941-10-21 | Chain Belt Co | Roller chain sprocket wheel |
| US2385923A (en) | 1941-10-23 | 1945-10-02 | Chain Belt Company Milwaukee | Conveyer chain |
| US2382740A (en) | 1943-07-10 | 1945-08-14 | Fred P Noffsinger | Sprocket wheel |
| US2934200A (en) | 1956-10-15 | 1960-04-26 | Gen Motors Corp | Conveyor system |
| US3130791A (en) | 1963-02-04 | 1964-04-28 | Lloyd K Schmidt | Endless chain drive unit |
| US3298406A (en) | 1964-05-15 | 1967-01-17 | Herbert V Erickson | Chain saw chain |
| US3377875A (en) | 1966-05-09 | 1968-04-16 | Gen Motors Corp | Chain drive power transmitting mechanism |
| US3495468A (en) | 1968-11-21 | 1970-02-17 | Gen Motors Corp | Chain drive |
| US3604755A (en) | 1969-07-24 | 1971-09-14 | Cincinnati Mine Machinery Co | Cutter bar, cutter chain and sprocket assembly |
| US3752035A (en) | 1971-04-05 | 1973-08-14 | Gen Electric | Auto-synchronizing gear system |
| US3824869A (en) | 1972-09-25 | 1974-07-23 | Standard Tool & Mfg Co | Chain drive having pivoted drive teeth |
| JPS4980736A (zh) | 1972-12-07 | 1974-08-03 | ||
| SU515906A1 (ru) | 1974-09-09 | 1976-05-30 | Гомельский Ордена Ленина Завод Сельскохозяйственного Машиностроения | Звезвочка дл роликовой или втулочной цепи |
| US4089406A (en) | 1974-10-09 | 1978-05-16 | Fritz Teske | Chain drive |
| SU595565A1 (ru) | 1975-09-01 | 1978-02-28 | Gotovtsev Aleksandr A | Звездочка |
| US4016772A (en) | 1975-09-22 | 1977-04-12 | Caterpillar Tractor Co. | Sprocket member configuration |
| US4058023A (en) | 1975-12-08 | 1977-11-15 | Esco Corporation | Rotating assembly for material handling equipment |
| US4036071A (en) | 1976-04-02 | 1977-07-19 | Hollis And Company | Sprocket and method for producing same |
| JPS551989Y2 (zh) | 1976-12-28 | 1980-01-19 | ||
| US4116081A (en) | 1977-05-25 | 1978-09-26 | Caterpillar Tractor Co. | Sprocket profile |
| US4168634A (en) | 1977-05-27 | 1979-09-25 | General Motors Corporation | Chain and sprocket power transmitting mechanism |
| US4099423A (en) | 1977-06-21 | 1978-07-11 | Max Mullins | Compatible sprocket and chain system |
| PL201127A1 (pl) | 1977-09-29 | 1979-09-24 | Obrabiarek Precyzyj Ponar | Kolo zebate o zebach srubowych |
| US4274184A (en) | 1977-10-20 | 1981-06-23 | Svein Nordtvedt | Mesh distribution wheels |
| US4174642A (en) | 1978-02-09 | 1979-11-20 | Gehl Company | Chain drive including sprocket having alternate wide and narrow teeth |
| US4200000A (en) | 1978-10-04 | 1980-04-29 | Societe Suisse Pour L'industrie Horlogere Management Services S.A. | Gear train |
| US4223528A (en) | 1978-10-31 | 1980-09-23 | Societe Suisse Pour L'industrie Horlogere Management Services, S.A. | Unidirectional gear transmission |
| US4207777A (en) | 1978-11-07 | 1980-06-17 | Societe Suisse pour l'Industrie Horlogere Mangagement Services S.A. | One way gear train |
| JPS55125630U (zh) | 1979-02-28 | 1980-09-05 | ||
| JPS6042359B2 (ja) | 1979-09-14 | 1985-09-21 | 株式会社日立製作所 | スクリユ−ロ−タ |
| JPS5810706Y2 (ja) | 1979-10-11 | 1983-02-26 | 株式会社シマノ | 多段スプロケツト装置 |
| US4342560A (en) | 1980-05-16 | 1982-08-03 | Borg-Warner Corporation | Composite chain link assembly |
| AU8752782A (en) | 1981-08-24 | 1983-03-03 | Cornelis Johannes Maria Beerens | Chain saw bar and sprocket |
| US4645475A (en) | 1981-10-13 | 1987-02-24 | Royce H. Husted | Incrementally variable bicycle transmission |
| US4521207A (en) | 1982-06-11 | 1985-06-04 | Royce H. Husted | Incrementally variable transmission |
| US4509937A (en) | 1981-12-18 | 1985-04-09 | Borg-Warner Corporation | Power transmission chain |
| US4509323A (en) | 1981-12-18 | 1985-04-09 | Borg-Warner Corporation | Power transmission chain |
| JPS58203264A (ja) * | 1982-05-24 | 1983-11-26 | Honda Motor Co Ltd | スプロケツトの歯型形状 |
| US4522611A (en) | 1982-12-27 | 1985-06-11 | Esco Corporation | Sprocket assembly with replaceable teeth |
| US4559028A (en) | 1983-07-11 | 1985-12-17 | Reeves Jr James B | Adjustment pitch sprocket |
| US4531926A (en) | 1983-07-11 | 1985-07-30 | Reeves Jr James B | Adjustable pitch sprocket |
| US4571218A (en) | 1983-07-11 | 1986-02-18 | Reeves Jr James B | Adjustable pitch sprocket |
| IN162773B (zh) | 1983-10-12 | 1988-07-09 | Mitsuboshi Belting Ltd | |
| US4602279A (en) * | 1984-03-21 | 1986-07-22 | Actv, Inc. | Method for providing targeted profile interactive CATV displays |
| US4832668A (en) | 1984-10-17 | 1989-05-23 | Borg-Warner Corporation | Power transmission chain |
| US4653340A (en) | 1986-03-03 | 1987-03-31 | Pitney Bowes Inc. | Beveled spur gear |
| US4738653A (en) | 1987-01-15 | 1988-04-19 | Deere & Company | Roller chain drive having a self cleaning roller chain sprocket |
| US4758209A (en) | 1987-04-01 | 1988-07-19 | Borg-Warner Automotive, Inc. | Silent timing chain and sprocket system |
| US4758210A (en) | 1987-04-01 | 1988-07-19 | Borg-Warner Automotive, Inc. | Silent chain and sprocket system |
| JPS6445989A (en) | 1987-08-11 | 1989-02-20 | Hitachi Ltd | Screw fluid machine |
| DE3887076T2 (de) | 1987-10-21 | 1994-07-21 | Shimano Industrial Co | Zusammenbau eines mehrstufigen Kettenrades für ein Fahrrad. |
| JPH0621604B2 (ja) | 1988-01-27 | 1994-03-23 | バンドー化学株式会社 | 歯付ベルトおよびそのベルトを使用する動力伝達装置 |
| US4813916A (en) | 1988-03-08 | 1989-03-21 | Sachs-Huret S.A. | Sprocket having teeth of improved shape and a cycle free-wheel including said sprocket |
| JPH02503708A (ja) | 1988-03-29 | 1990-11-01 | ロストフスキー、ゴスダルストウェンヌイ、ユニベルシテート、イメーニ、エム、アー、ススロワ | ノビコフ型伝動装置 |
| US4911032A (en) | 1988-10-03 | 1990-03-27 | Moore Push-Pin Company | One-way gear |
| DE3842140A1 (de) * | 1988-10-28 | 1990-05-03 | Bernhard Dipl Ing Rohloff | Rollenkette |
| JPH02127185A (ja) | 1988-11-07 | 1990-05-15 | Shimano Ind Co Ltd | 自転車用多段スプロケット装置 |
| IT1227627B (it) | 1988-11-29 | 1991-04-23 | Pirelli Transmissioni Ind Spa | Puleggia dentata e relativa trasmissione. |
| US4969371A (en) | 1989-01-26 | 1990-11-13 | Renold, Inc. | Gear type flexible coupling |
| JPH03295U (zh) | 1989-02-15 | 1991-01-07 | ||
| US4915675B1 (en) | 1989-02-28 | 1998-12-29 | Borg Warner Automotive | Pitch equalized chain with frequency modulated engagement |
| US5155591A (en) * | 1989-10-23 | 1992-10-13 | General Instrument Corporation | Method and apparatus for providing demographically targeted television commercials |
| JPH03217389A (ja) | 1990-01-20 | 1991-09-25 | Shimano Ind Co Ltd | 自転車用多段スプロケットホイール |
| US5446919A (en) * | 1990-02-20 | 1995-08-29 | Wilkins; Jeff K. | Communication system and method with demographically or psychographically defined audiences |
| US5154674A (en) | 1990-04-25 | 1992-10-13 | Borg-Warner Automotive Transmission & Engine Components Corporation | Power transmission chain constructed with asymmetrical links |
| US5162022A (en) | 1990-09-18 | 1992-11-10 | Maeda Industries, Ltd. | Multiple sprocket assembly for bicycle |
| US5163826A (en) | 1990-10-23 | 1992-11-17 | Cozens Eric E | Crescent gear pump with hypo cycloidal and epi cycloidal tooth shapes |
| US5192252A (en) * | 1991-10-16 | 1993-03-09 | Borg-Warner Automotive Transmission & Engine Components Corporation | Roller chain with randomized pitch |
| US5564088A (en) * | 1992-02-07 | 1996-10-08 | Sony Corporation | Broadcast signal receiver with means for prioritizing broadcast signals based on previous selections thereof |
| US5427580A (en) | 1992-05-19 | 1995-06-27 | Borg-Warner Automotive, Inc. | Phased chain assemblies |
| US5600364A (en) * | 1992-12-09 | 1997-02-04 | Discovery Communications, Inc. | Network controller for cable television delivery systems |
| JPH06199268A (ja) | 1992-12-28 | 1994-07-19 | Mori San Tsuaa:Kk | 自転車用多段スプロケット装置 |
| JP3297914B2 (ja) * | 1993-01-08 | 2002-07-02 | ソニー株式会社 | テレビジョン受像機 |
| JP3059021B2 (ja) | 1993-03-02 | 2000-07-04 | シンワ株式会社 | 歯車噛合装置およびテーププレーヤ |
| US5318483A (en) | 1993-05-14 | 1994-06-07 | American Longwall Face Conveyors, Inc. | Sprocket with asymmetrical teeth for mining conveyors |
| IT1270417B (it) | 1993-06-03 | 1997-05-05 | Campagnolo Srl | Gruppo pignoni per biciclette |
| JP2546442Y2 (ja) | 1993-06-30 | 1997-09-03 | 株式会社椿本チエイン | ローラチェーン用スプロケット |
| DE4330989A1 (de) | 1993-09-13 | 1995-03-16 | Fichtel & Sachs Ag | Kettenschaltung, insbesondere für Fahrräder |
| JP3644455B2 (ja) * | 1994-09-29 | 2005-04-27 | ソニー株式会社 | 番組情報放送方式、番組情報表示方法および受信装置 |
| US5758257A (en) * | 1994-11-29 | 1998-05-26 | Herz; Frederick | System and method for scheduling broadcast of and access to video programs and other data using customer profiles |
| US6002393A (en) * | 1995-08-22 | 1999-12-14 | Hite; Kenneth C. | System and method for delivering targeted advertisements to consumers using direct commands |
| US5876295A (en) * | 1996-01-23 | 1999-03-02 | Cloyes Gear And Products, Inc. | Roller chain drive system having improved noise characteristics |
| DE19606667C2 (de) | 1996-02-23 | 1999-10-14 | Sram De Gmbh | Kettenschaltung für Fahrräder |
| US5945988A (en) * | 1996-06-06 | 1999-08-31 | Intel Corporation | Method and apparatus for automatically determining and dynamically updating user preferences in an entertainment system |
| DK0932398T3 (da) * | 1996-06-28 | 2006-09-25 | Ortho Mcneil Pharm Inc | Anvendelse af topiramat eller derivater deraf til fremstilling af et lægemiddel til behandling af maniodepressive bipolære forstyrrelser |
| JPH1026213A (ja) | 1996-07-09 | 1998-01-27 | Tsubakimoto Chain Co | ローラチェーン用スプロケット歯形 |
| US6090003A (en) * | 1996-07-25 | 2000-07-18 | Cloyes Gear & Products, Inc. | Random engagement roller chain sprocket having improved noise characteristics |
| US6144376A (en) * | 1996-11-15 | 2000-11-07 | Intel Corporation | Method and apparatus for merging, displaying and accessing personal computer content listings via a television user interface |
| US6114376A (en) * | 1997-04-30 | 2000-09-05 | Mcgill University | Methods for using macrocyclic lactone compounds as multidrug resistance reversing agents in tumor and other cells |
| US6131127A (en) * | 1997-09-24 | 2000-10-10 | Intel Corporation | I/O transactions on a low pin count bus |
| US6119189A (en) * | 1997-09-24 | 2000-09-12 | Intel Corporation | Bus master transactions on a low pin count bus |
| US5991841A (en) * | 1997-09-24 | 1999-11-23 | Intel Corporation | Memory transactions on a low pin count bus |
| US6184918B1 (en) * | 1997-09-30 | 2001-02-06 | Intel Corporation | Method and apparatus for monitoring viewing of broadcast data |
| EP1108160B1 (en) * | 1998-08-25 | 2003-10-29 | CLOYES GEAR & PRODUCTS, INC. | A roller chain sprocket with cushion rings |
| JP3212288B2 (ja) * | 1999-03-02 | 2001-09-25 | 三協オイルレス工業株式会社 | チェーン駆動機構装置 |
| US6387001B1 (en) * | 2000-01-21 | 2002-05-14 | Borgwarner Inc. | Rollerless chain having sprocket-engaging pins |
| US6736744B1 (en) * | 2000-11-01 | 2004-05-18 | Borgwarner, Inc. | Roller chain sprocket for preventing substantially radial impact with chain rollers |
-
2001
- 2001-12-04 US US10/004,544 patent/US6761657B2/en not_active Expired - Lifetime
-
2002
- 2002-12-03 EP EP02804481A patent/EP1451489B1/en not_active Expired - Fee Related
- 2002-12-03 MX MXPA04005220A patent/MXPA04005220A/es active IP Right Grant
- 2002-12-03 AU AU2002357052A patent/AU2002357052A1/en not_active Abandoned
- 2002-12-03 BR BRPI0214645-2B1A patent/BR0214645B1/pt not_active IP Right Cessation
- 2002-12-03 WO PCT/US2002/038412 patent/WO2003048604A2/en active Application Filing
- 2002-12-03 CA CA2468973A patent/CA2468973C/en not_active Expired - Fee Related
- 2002-12-03 JP JP2003549761A patent/JP2005511983A/ja active Pending
- 2002-12-03 CN CNB028242890A patent/CN100398877C/zh not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3194609A (en) * | 1964-03-30 | 1965-07-13 | Thurlow Lloyd | Sprocket and chain drive |
| US3448629A (en) * | 1968-06-20 | 1969-06-10 | Amsted Ind Inc | Chain and sprocket drive |
| WO1998000656A1 (en) * | 1996-07-03 | 1998-01-08 | Cloyes Gear And Products, Inc. | Roller chain drive system having improved noise characteristics |
| WO1998004848A2 (en) * | 1996-07-25 | 1998-02-05 | Cloyes Gear And Products, Inc. | Random engagement roller chain sprocket having improved noise characteristics |
| WO1998029673A2 (en) * | 1996-12-19 | 1998-07-09 | Cloyes Gear And Products, Inc. | Random engagement roller chain sprocket |
| US20020132689A1 (en) * | 1996-12-19 | 2002-09-19 | Young James D. | Roller chain sprocket with added chordal pitch reduction |
| US6416436B1 (en) * | 1999-07-22 | 2002-07-09 | Tsubakimoto Chain Co. | Silent chain power transmitting device |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2003048604A3 (en) | 2003-09-18 |
| AU2002357052A8 (en) | 2003-06-17 |
| JP2005511983A (ja) | 2005-04-28 |
| CA2468973A1 (en) | 2003-06-12 |
| US6761657B2 (en) | 2004-07-13 |
| BR0214645B1 (pt) | 2013-09-24 |
| AU2002357052A1 (en) | 2003-06-17 |
| US20020132689A1 (en) | 2002-09-19 |
| CA2468973C (en) | 2010-10-05 |
| BR0214645A (pt) | 2004-11-03 |
| EP1451489B1 (en) | 2012-06-20 |
| MXPA04005220A (es) | 2004-08-19 |
| CN1678846A (zh) | 2005-10-05 |
| EP1451489A2 (en) | 2004-09-01 |
| WO2003048604A2 (en) | 2003-06-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100398877C (zh) | 具有附加弦节距减小量的滚链链轮 | |
| US6325734B1 (en) | Random engagement roller chain sprocket with staged meshing and flank relief to provide improved noise characteristics | |
| US5921878A (en) | Roller chain drive system having improved noise characteristics | |
| US5976045A (en) | Random engagement roller chain sprocket having improved noise characteristics | |
| CN103492750A (zh) | 降低啮合冲击逆齿链和链轮传动系统 | |
| CN101210606B (zh) | 链传动装置 | |
| US20040185977A1 (en) | Random engagement roller chain sprocket and timing chain system including same | |
| CN101109436A (zh) | 适用于动力传动的增速或减速齿轮副 | |
| US6090003A (en) | Random engagement roller chain sprocket having improved noise characteristics | |
| CN102144111A (zh) | 降低啮合冲击的逆齿链以及链轮驱动系统 | |
| CN101191549A (zh) | 链轮 | |
| CN102753857A (zh) | 降低了啮合冲击的齿形链和链轮驱动系统 | |
| CN101680522A (zh) | 调频啮合的反齿链链轮 | |
| JP4309052B2 (ja) | 段階的かみ合い及びルート緩和を具え、改良されたノイズ特性を提供するランダム係合ローラチェーンスプロケット | |
| US6533107B2 (en) | Silent chain power transmitting apparatus | |
| US2725755A (en) | Power transmission chain drive | |
| EP1281890A2 (en) | Silent chain transmission mechanism | |
| JP5520278B2 (ja) | 一定のトルクを有するプロフィールギヤ | |
| CN101278145B (zh) | 具有改进的齿形和金属垫圈的滚子链轮 | |
| CA2582737A1 (en) | Out-of-round rotation disc for a timing drive | |
| US20080176689A1 (en) | Rotating disk with a periodically changing tooth-space geometry | |
| JP5088241B2 (ja) | 無段変速装置 | |
| US2678569A (en) | Power transmission chain | |
| US20090253542A1 (en) | Rotary disc | |
| Domek et al. | Methods of designing of timing belts pulley |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20080702 Termination date: 20161203 |