BR112016003714B1 - Perfurador ósseo - Google Patents
Perfurador ósseo Download PDFInfo
- Publication number
- BR112016003714B1 BR112016003714B1 BR112016003714-6A BR112016003714A BR112016003714B1 BR 112016003714 B1 BR112016003714 B1 BR 112016003714B1 BR 112016003714 A BR112016003714 A BR 112016003714A BR 112016003714 B1 BR112016003714 B1 BR 112016003714B1
- Authority
- BR
- Brazil
- Prior art keywords
- bone
- drill
- axis
- mass
- cross
- Prior art date
Links
- 210000000988 bone and bone Anatomy 0.000 title claims abstract description 403
- 238000005520 cutting process Methods 0.000 claims abstract description 83
- 230000002262 irrigation Effects 0.000 claims abstract description 15
- 238000003973 irrigation Methods 0.000 claims abstract description 15
- 238000006073 displacement reaction Methods 0.000 claims description 48
- 230000007423 decrease Effects 0.000 claims description 13
- 239000004053 dental implant Substances 0.000 claims description 7
- 229910045601 alloy Inorganic materials 0.000 claims description 5
- 239000000956 alloy Substances 0.000 claims description 5
- 239000012530 fluid Substances 0.000 claims description 3
- 238000005553 drilling Methods 0.000 abstract description 45
- 238000000605 extraction Methods 0.000 abstract description 31
- 238000000034 method Methods 0.000 abstract description 31
- 230000033001 locomotion Effects 0.000 abstract description 24
- 238000013461 design Methods 0.000 abstract description 15
- 230000000399 orthopedic effect Effects 0.000 abstract description 8
- 230000015572 biosynthetic process Effects 0.000 abstract description 3
- 239000000463 material Substances 0.000 description 34
- 238000000926 separation method Methods 0.000 description 13
- 239000012634 fragment Substances 0.000 description 12
- 238000002513 implantation Methods 0.000 description 10
- -1 but not limited to Substances 0.000 description 9
- 238000010168 coupling process Methods 0.000 description 9
- 239000007943 implant Substances 0.000 description 9
- 239000002184 metal Substances 0.000 description 9
- 229910052751 metal Inorganic materials 0.000 description 9
- 238000013459 approach Methods 0.000 description 8
- 230000008878 coupling Effects 0.000 description 8
- 238000005859 coupling reaction Methods 0.000 description 8
- 238000000227 grinding Methods 0.000 description 8
- 239000000919 ceramic Substances 0.000 description 7
- 230000007246 mechanism Effects 0.000 description 7
- 239000002245 particle Substances 0.000 description 7
- 230000003247 decreasing effect Effects 0.000 description 6
- 230000009977 dual effect Effects 0.000 description 6
- 238000003754 machining Methods 0.000 description 6
- 229910001000 nickel titanium Inorganic materials 0.000 description 6
- 238000002360 preparation method Methods 0.000 description 6
- 239000000758 substrate Substances 0.000 description 6
- 230000035876 healing Effects 0.000 description 5
- 230000006872 improvement Effects 0.000 description 5
- 230000001537 neural effect Effects 0.000 description 5
- 239000010703 silicon Substances 0.000 description 5
- 229910052710 silicon Inorganic materials 0.000 description 5
- 239000004575 stone Substances 0.000 description 5
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 4
- 238000004140 cleaning Methods 0.000 description 4
- 239000002131 composite material Substances 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 150000002739 metals Chemical class 0.000 description 4
- 239000004033 plastic Substances 0.000 description 4
- 229920003023 plastic Polymers 0.000 description 4
- 238000003825 pressing Methods 0.000 description 4
- 230000002441 reversible effect Effects 0.000 description 4
- 230000009919 sequestration Effects 0.000 description 4
- 238000007514 turning Methods 0.000 description 4
- 239000002023 wood Substances 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 230000003466 anti-cipated effect Effects 0.000 description 3
- 238000005452 bending Methods 0.000 description 3
- 230000000295 complement effect Effects 0.000 description 3
- 229940113601 irrigation solution Drugs 0.000 description 3
- HLXZNVUGXRDIFK-UHFFFAOYSA-N nickel titanium Chemical compound [Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ti].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni].[Ni] HLXZNVUGXRDIFK-UHFFFAOYSA-N 0.000 description 3
- 230000000278 osteoconductive effect Effects 0.000 description 3
- 229910001220 stainless steel Inorganic materials 0.000 description 3
- 210000001519 tissue Anatomy 0.000 description 3
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 2
- 229910000990 Ni alloy Inorganic materials 0.000 description 2
- 229910001069 Ti alloy Inorganic materials 0.000 description 2
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 2
- 239000012237 artificial material Substances 0.000 description 2
- 230000008933 bodily movement Effects 0.000 description 2
- 229910003460 diamond Inorganic materials 0.000 description 2
- 239000010432 diamond Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000005516 engineering process Methods 0.000 description 2
- 238000003475 lamination Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000007935 neutral effect Effects 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 239000010935 stainless steel Substances 0.000 description 2
- 238000001356 surgical procedure Methods 0.000 description 2
- 206010028851 Necrosis Diseases 0.000 description 1
- 206010031264 Osteonecrosis Diseases 0.000 description 1
- 241001422033 Thestylus Species 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 230000000890 antigenic effect Effects 0.000 description 1
- 230000002238 attenuated effect Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000001574 biopsy Methods 0.000 description 1
- 210000004369 blood Anatomy 0.000 description 1
- 239000008280 blood Substances 0.000 description 1
- 239000002639 bone cement Substances 0.000 description 1
- 229910052799 carbon Inorganic materials 0.000 description 1
- 239000003610 charcoal Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 239000002826 coolant Substances 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000003306 harvesting Methods 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 210000004373 mandible Anatomy 0.000 description 1
- 210000002050 maxilla Anatomy 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000003801 milling Methods 0.000 description 1
- 238000009740 moulding (composite fabrication) Methods 0.000 description 1
- 230000017074 necrotic cell death Effects 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 230000002188 osteogenic effect Effects 0.000 description 1
- 230000002138 osteoinductive effect Effects 0.000 description 1
- 238000013021 overheating Methods 0.000 description 1
- 230000002028 premature Effects 0.000 description 1
- 238000004080 punching Methods 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 210000000689 upper leg Anatomy 0.000 description 1
- 238000003466 welding Methods 0.000 description 1
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B51/00—Tools for drilling machines
- B23B51/02—Twist drills
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1613—Component parts
- A61B17/1615—Drill bits, i.e. rotating tools extending from a handpiece to contact the worked material
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/1635—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans for grafts, harvesting or transplants
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods
- A61B17/16—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans
- A61B17/164—Instruments for performing osteoclasis; Drills or chisels for bones; Trepans intramedullary
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61C—DENTISTRY; APPARATUS OR METHODS FOR ORAL OR DENTAL HYGIENE
- A61C3/00—Dental tools or instruments
- A61C3/02—Tooth drilling or cutting instruments; Instruments acting like a sandblast machine
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B51/00—Tools for drilling machines
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B51/00—Tools for drilling machines
- B23B51/0081—Conical drills
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D1/00—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor
- B28D1/14—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by boring or drilling
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B28—WORKING CEMENT, CLAY, OR STONE
- B28D—WORKING STONE OR STONE-LIKE MATERIALS
- B28D1/00—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor
- B28D1/14—Working stone or stone-like materials, e.g. brick, concrete or glass, not provided for elsewhere; Machines, devices, tools therefor by boring or drilling
- B28D1/146—Tools therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2250/00—Compensating adverse effects during turning, boring or drilling
- B23B2250/16—Damping of vibrations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2251/00—Details of tools for drilling machines
- B23B2251/20—Number of cutting edges
- B23B2251/204—Four cutting edges
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2251/00—Details of tools for drilling machines
- B23B2251/24—Overall form of drilling tools
- B23B2251/241—Cross sections of the diameter of the drill
- B23B2251/244—Cross sections of the diameter of the drill decreasing in a direction towards the shank from the tool tip
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23B—TURNING; BORING
- B23B2251/00—Details of tools for drilling machines
- B23B2251/24—Overall form of drilling tools
- B23B2251/241—Cross sections of the diameter of the drill
- B23B2251/245—Variable cross sections
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/03—Processes
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/44—Cutting by use of rotating axially moving tool with means to apply transient, fluent medium to work or product
- Y10T408/45—Cutting by use of rotating axially moving tool with means to apply transient, fluent medium to work or product including Tool with duct
- Y10T408/455—Conducting channel extending to end of Tool
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/89—Tool or Tool with support
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/89—Tool or Tool with support
- Y10T408/905—Having stepped cutting edges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/89—Tool or Tool with support
- Y10T408/909—Having peripherally spaced cutting edges
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T408/00—Cutting by use of rotating axially moving tool
- Y10T408/89—Tool or Tool with support
- Y10T408/909—Having peripherally spaced cutting edges
- Y10T408/9095—Having peripherally spaced cutting edges with axially extending relief channel
- Y10T408/9097—Spiral channel
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T409/00—Gear cutting, milling, or planing
- Y10T409/30—Milling
- Y10T409/303752—Process
- Y10T409/303808—Process including infeeding
Landscapes
- Engineering & Computer Science (AREA)
- Health & Medical Sciences (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- General Health & Medical Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Dentistry (AREA)
- Public Health (AREA)
- Mining & Mineral Resources (AREA)
- Biomedical Technology (AREA)
- Molecular Biology (AREA)
- Medical Informatics (AREA)
- Heart & Thoracic Surgery (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Epidemiology (AREA)
- Transplantation (AREA)
- Surgical Instruments (AREA)
- Drilling Tools (AREA)
Abstract
FERRAMENTAS DE PERFURAÇÃO ÓSSEA E DENTAL DE MOVIMENTO DE PRECESSÃO E APARELHO DE EXTRAÇÃO ÓSSEA. A presente invenção refere-se a dispositivos ortopédicos e dentais e métodos para uso dos mesmos. Por exemplo, perfuradores ósseos e perfuradores dentais inovadores são descritos. Os perfuradores ósseos e dentais têm pelo menos alguns centros de massa que são deslocados do eixo de rotação dos perfuradores. Consequentemente, os perfuradores ósseos e dentais podem girar e cortar com o uso de um padrão de precessão de movimento. O projeto facilita o corte de ossos, formação de lascas e capacidade de arraste, irrigação e extração óssea. Em algumas modalidades, as lascas ósseas são coletadas em um aparelho removível fixado à porção distal do perfurador, e as lascas ósseas coletadas podem ser usadas para formação de enxerto ósseo.
Description
[001] Este pedido reivindica prioridade para o Pedido Provisório no U.S. 61/868.276, depositado em 21 de agosto de 2013, e para o Pedido Provisório no U.S. 61/899.705, depositado em 4 de novembro de 2013. As revelações dos pedidos anteriores são consideradas parte de (e são incorporadas a título de referência em) a revelação deste pedido.
[002] Em um primeiro contexto, este documento refere-se a dispositivos ortopédicos e métodos para uso dos mesmos. Por exemplo, este documento se refere a perfuradores ósseos inovadores para realizar osteotomias ou para perfurar ossos. Os perfuradores ósseos têm pelo menos alguns centros de massa que são deslocados do eixo de rotação do perfurador. Consequentemente, os perfuradores ósseos podem girar e cortar com o uso de um padrão de precessão de movimento. Em um segundo contexto, este documento se refere a ferramentas de perfuração de movimento de precessão em geral. Por exemplo, este documento se refere a brocas e métodos de uso para perfurar uma variedade de materiais que inclui, porém, sem limitação, metais, cerâmica, madeira, placa de reboco, plásticos, pedra, compósitos, sintéticos, silício e similares. Este documento também se refere a perfuradores dentais e métodos para uso dos mesmos.
[003] Osteotomias são realizadas de modo rotineiro para acesso cirúrgico ou para dividir ou repor um osso para correção cirúrgica. Furos podem ser perfurados em ossos por várias razões, tais como para acomodar parafusos, pinos, implantes dentais e vários outros dispositivos implantáveis e materiais, ou para coletar uma amostra óssea para biópsia. Em exemplo comum da necessidade de uma osteotomia é um procedimento de implante dental 10 conforme retratado na Figura 1. Nesse procedimento, o cirurgião precisa criar um espaço de um diâmetro e profundidade específicos em osso 15 (mostrados em corte transversal) para acomodar um implante 20 de tamanho correspondente dentro do osso 15 e que se estende acima do tecido de goma 18. Frequentemente, o implante é colocado de modo subperiosteal, e osso de auto-enxerto é usado para suplantar e auxiliar na cicatrização.
[004] Os instrumentos tradicionais usados para criarem osteotomias remetem às brocas helicoidais comuns. Esses projetos foram descritos já em Hartshorn (1882), e modificados por Hanson (1904), Kallio (1960), Kim, (1980) e outros. Os mesmos foram somente alguns aprimoramentos nessa tecnologia desde esse tempo. Davis (o documento de Patente no U.S. 5.190.548, maio de 1993) descreveu um perfurador oco de quatro lados com capacidade de evacuar ossos por meio da porção em túnel ou oca do perfurador. Leppelmeier (documento de Patente no U.S. 6.312.432, novembro de 2001) descreveu um perfurador ósseo, também similar a uma broca helicoidal, com um ponto de estabilização ou ponta projetada para impedir que o perfurador ósseo se desvie do eixo longo da osteotomia. Leppelmeier (Publicação de Patente no U.S. 2012/0004661, janeiro de 2012) também propôs um perfurador ortopédico com canais que têm ângulos helicoidais variáveis. Lehenkari (Publicação no U.S. 2012/20245586, setembro de 2012, e Publicação no U.S. 2013/0110112, maio de 2013) propôs o uso de ligas superelásticas para criar um perfurador que era multidirecional.
[005] Além dos aprimoramentos mínimos na tecnologia de perfuração, esses projetos oferecem pouca oportunidade para coletar osso para um auto-enxerto, que é frequentemente necessário. Nesses casos, o cirurgião pode usar um auto- enxerto de outro local ou pode preferir usar aloenxertos ou material artificial. Enxertos autólogos, no entanto, são preferenciais devido ao fato de que os mesmos são inerentemente biocompatíveis, osteocondutivos, osteoindutivos e osteogênicos. A extração óssea autóloga de um local de doador resulta em tempo adicional e o risco presente de complicações tais como dor e morbidade de local de doador. Aloenxertos, derivados de tecidos de doador (cadáver), são somente osteocondutivos, e podem impor o risco de contaminação. Materiais artificiais tais como cimento ósseo aloplástico são escolhas fracas para colocação de enxerto visto que os mesmos são potencialmente antigênicos e raramente osteocondutivos. Desse modo, a extração óssea da área operacional original é desejável.
[006] Realizar osteotomias pode ser desafiador mesmo com iluminação ideal, ampliação e assistência satisfatória. Por exemplo, em alguns casos, o local cirúrgico pode ser obscurecido por sangue e lascas ósseas. Manter o campo operativo limpo durante a cirurgia é benéfico. Desse modo, a irrigação constante e controlada com um meio fisiológico é geralmente uma parte integral desses procedimentos. Também é vantajoso para a mecânica de corte de ossos, visto que os canais dos perfuradores cortam de modo mais eficaz quando o substrato está mais frio e na ausência de fragmentos ósseos que pode obstruir e enguiçar o perfurador. A irrigação não somente aprimora a eficiência do instrumento de corte, a mesma também evita necrose térmica do osso que pode retardar ou neutralizar posteriormente o processo de cicatrização. A irrigação controlada ocorre em importância ainda maior se o operador se destina a capturar os fragmentos ósseos para reutilização em um auto-enxerto.
[007] Embora o uso de irrigação seja vantajoso, a entrega do irrigante ao local cirúrgico tipicamente exige a pressurização do irrigante que pode tornar a recuperação de fragmentos ósseos para um auto-enxerto difícil ou impossível. Um método aprimorado de limpar fragmentos ósseos permitirá irrigação sob pressão, e auxiliar o cirurgião mantendo-se o limpador de área em operação, mais visível e mais acessível.
[008] Idealmente, a extração óssea deve ser feita enquanto se realiza a osteotomia e ainda fornece acesso adequado ao cirúrgico para irrigação, enquanto mantém uma operação limpa para a cirurgia.
[009] Projetos anteriores para extração óssea, tais como aqueles sugeridos por Meller (documento de patente no U.S. 7.033.359) são dispositivos complexos que compreendem uma mola, um retentor de mola disposto em torno de uma haste, que é anexado a um aparelho de coleta fixado. O aparelho exige fixação à cabeça ou braço da peça de mão por um pino de retenção. O aparelho é essencialmente destinado para extração óssea e não é projetado para preparar a osteotomia para o implante e extrair ossos simultaneamente. Devido ao fato de que o aparelho é solido e fixo, o mesmo também bloquearia o irrigante e causaria sobreaquecimento potencial do substrato ósseo e das partículas ósseas que são extraídas.
[010] As Figuras 2A e 2B mostram um perfurador ósseo 200 convencional. O perfurador ósseo 200 mostrado inclui um eixo 202 com uma extremidade livre ou ponta 204 e uma haste 206. O eixo 202 define sulcos 208 e 210 que são espiralados ao redor do eixo 202. Os sulcos 208 e 210 são também denominados no presente relatório descritivo como canais 208 e 210.
[011] A Figura 2B mostra um corte transversal 212 (isto é, corte transversal A-A) do perfurador ósseo 200. O corte transversal 208 mostra espaços de corte transversal 214 e 216 dos canais 208 e 210, respectivamente. Os canais 208 e 210 são geralmente os espaços em ambos os lados de uma estrutura helicoidal 218 (ou hélice) que é espiralada ao redor do eixo 202. A porção de fundo de um canal — visto como uma linha ou curva (por exemplo, curva 220 da Figura 2B) — é denominada no presente relatório descritivo como uma ranhura. A porção de uma ranhura que entra em contato com uma superfície que é cortada durante o corte será denominada no presente relatório descritivo como um apoio radial. O item 222 da Figura 2B é um exemplo de um apoio radial. Um canal de um perfurador ósseo geralmente inclui uma borda modelada configurada para corte. A borda 224 da Figura 2A é um exemplo de tal borda de corte. A borda 224 pode ser vista como um ponto 226 na Figura 2B. Geralmente, um instrumento que tem bordas de corte de lado direito é aquele que cortará ou removerá material ao girar em sentido horário, conforme visto da haste até a ponta. Neste relatório descritivo, uma direção de rotação será especificada conforme visto da haste até a ponta do instrumento. A direção de corte de rotação para um perfurador ósseo de lado direito está no sentido horário. Um instrumento que tem bordas de corte de lado esquerdo é aquele que cortará ou removerá material ao girar em sentido anti-horário. A direção de corte de rotação, nesse caso, está no sentido anti-horário. Um perfurador ósseo inclui uma porção de trabalho ou corpo de perfuração, que é a porção que pode cortar ou remover material. A porção de trabalho é tipicamente a porção ao longo do eixo que está entre a ponta do instrumento e a extremidade de haste dos canais. A porção 228 é a porção de trabalho para o perfurador ósseo mostrado na Figura 1A. A porção de trabalho é também denominada neste relatório descritivo como a porção de corte, corpo de trabalho, ou o corpo de perfuração; e o comprimento de trabalho como o comprimento de corte ou comprimento de trabalho.
[012] Este documento fornece dispositivos ortopédicos e métodos para uso dos mesmos. Por exemplo, perfuradores ósseos inovadores para preparar uma osteotomia são fornecidos. Os perfuradores ósseos têm pelo menos alguns centros de massa que são deslocados do eixo de rotação dos perfuradores. O centro de massa deslocado permite que os perfuradores ósseos forneçam movimento de precessão, ou formem ondas mecânicas, e são, portanto, denominadas nominalmente no presente documento como perfuradores ósseos oscilantes ou de precessão. Projetos oscilantes criam envelopes de corte mais amplos com áreas menores de corpo de perfuração em corte transversal, o que torna os perfuradores ósseos mais flexíveis do que projetos não oscilantes. Os perfuradores ósseos também exibem maiores ângulos de folga e capacidade de arraste aprimorada. Em algumas modalidades, os instrumentos de perfuração fornecidos no presente documento são feitos de aço inoxidável que podem ser ou não revestidos. Em modalidades alternativas, os instrumentos de perfuração fornecidos no presente documento são feitos de ligas superelásticas tais como ligas de níquel e titânio (por exemplo, nitinol) para aumentar a flexibilidade dos perfuradores ósseos. Em algumas modalidades, as lascas ósseas geradas por perfurações ósseas são coletadas em um aparelho removível fixado à porção distal do perfurador, e as lascas ósseas coletadas podem ser usadas para formação de enxerto ósseo.
[013] Embora as ferramentas de perfuração de movimento de precessão fornecidas no presente documento sejam descritas abaixo no contexto de perfuração de material ósseo, deve-se entender que as ferramentas de perfuração de movimento de precessão podem ser também usadas de modo benéfico no contexto de uma ampla variedade de outros materiais. Tais materiais podem incluir, porém, sem limitação, metais, cerâmica, madeira, placa de reboco, plásticos, pedra, compósitos, silício, sintéticos e similares. Os desenhos e descrição anexos são incluídos para fornecer um entendimento adicional da revelação em geral. Uma implantação de perfuração óssea é fornecida como uma aplicação exemplificadora contextual não limitadora para as ferramentas e métodos fornecidos no presente documento, de modo que um entendimento geral do projeto e operação das ferramentas de perfuração de movimento de precessão fornecidas no presente documento possa ser obtido. Um versado na técnica verificará prontamente, a partir de tal entendimento, como as ferramentas de perfuração de movimento de precessão fornecidas no presente documento são aplicáveis e úteis de modo vantajoso no contexto de perfuração de outros materiais além do material ósseo.
[014] Em geral, um aspecto deste documento apresenta um perfurador ósseo. O perfurador ósseo compreende uma haste configurada para ser fixável de modo liberável a um motor para girar o perfurador ósseo em torno de um eixo de rotação. O perfurador ósseo compreende adicionalmente um corpo de perfuração que se estende a partir da haste. O corpo de perfuração inclui uma extremidade de haste onde o corpo de perfuração se estende a partir da haste e uma extremidade livre em uma extremidade do corpo de perfuração que é oposta à extremidade de haste. O corpo de perfuração inclui uma porção de corte entre a extremidade de haste e a extremidade livre. O corpo de perfuração tem um centro de massa em cada corte transversal do corpo de perfuração. O centro de massa de um corte transversal na extremidade de haste é deslocado do eixo de rotação e o centro de massa de um corte transversal na extremidade livre está situado no eixo de rotação ou próximo ao mesmo. A distância do centro de massa do eixo de rotação diminui de monotonicamente da extremidade de haste até a extremidade livre.
[015] Em várias implantações do perfurador ósseo, a distância do centro de massa do eixo de rotação pode diminuir de modo linear da extremidade de haste até a extremidade livre. O centro de massa do corte transversal na extremidade livre pode estar situado no eixo de rotação. Os centros de massa podem formar uma espiral ao redor do eixo de rotação. O corpo de perfuração pode ter um diâmetro substancialmente constante da extremidade de haste até a extremidade livre. O corpo de perfuração pode ser afunilado da extremidade de haste até a extremidade livre. O corpo de perfuração pode ser afunilado da extremidade livre até a extremidade de haste, na qual o diâmetro de canal máximo está na extremidade livre. O corpo de perfuração pode incluir um corte transversal que é assimétrico, bissimétrico, simétrico, triangular ou quadrilateral (incluindo trapezoidal ou romboidal). O corpo afunilado pode incluir um primeiro corte transversal e um segundo corte transversal. O primeiro corte transversal pode ter uma primeira geometria, e o segundo corte transversal pode ter uma segunda geometria diferente da primeira geometria. O corpo afunilado pode cortar ao longo de um eixo duplo, sendo que o eixo duplo compreende um primeiro eixo correspondente ao eixo central de rotação e um segundo eixo correspondente a uma trajetória de massa deslocada que gira ao redor do eixo central.
[016] Em várias implantações do perfurador ósseo, o perfurador ósseo pode compreender uma ponta de cinzel na extremidade livre do corpo de perfuração. A ponta de cinzel pode subtender um ângulo de pelo menos 90 graus. Uma extremidade da ponta de cinzel pode estar no eixo de rotação. Uma extremidade da ponta de cinzel pode ser deslocada do eixo de rotação. A ponta de cinzel pode incluir uma pluralidade de planos inclinados em inclinação substancialmente igual. A ponta de cinzel pode incluir um primeiro plano inclinado e um segundo plano incluído com uma inclinação diferente do primeiro plano inclinado. Uma porção do corpo de perfuração próxima à extremidade livre pode ter bordas de corte embotadas. O perfurador ósseo pode ser constituído de uma liga de níquel e titânio.
[017] Em várias implantações do perfurador ósseo, a porção de corte do perfurador ósseo pode ser dimensionada para preparar uma osteotomia que tem um diâmetro dentro de uma faixa de cerca de 1,5 milímetros a cerca de 8,0 milímetros. O perfurador ósseo pode ser dimensionado para preparar uma osteotomia que tem uma profundidade suficiente para receber implantes com comprimentos que variam de cerca de 8 milímetros a cerca de 18 milímetros. A porção de corte pode ser revestida com carbono similar a diamante. A porção de corte pode ser revestida com diamante amorfo. A porção de corte pode ser revestida com nitreto de titânio. O perfurador ósseo pode ter uma passagem de irrigação longitudinal que atravessa uma porção de colar do perfurador ósseo e atravessa um núcleo ou trama do perfurador que sai de modo lateral e distal, em que a passagem é configurada para permitir o fluxo de fluido de irrigação para um perímetro lateral e a ponta do perfurador ósseo. O perfurador ósseo pode compreender adicionalmente um ou mais marcadores de profundidade ou medidores de profundidade no corpo de perfuração.
[018] Em um segundo aspecto geral, este documento apresenta um método de limpeza ou alargamento de um espaço intramedular. O método compreende: inserir um perfurador ósseo no espaço intramedular; colocar a extremidade de ponta do perfurador ósseo em contato com uma superfície interna do espaço intramedular; e girar o perfurador ósseo de modo que o corpo afunilado se flexione na direção oposta do eixo de rotação em uma proporção substancialmente igual em um primeiro ângulo de rotação e em um segundo ângulo de rotação.
[019] Em várias implantações do método, girar o perfurador ósseo pode incluir fazer com que o perfurador ósseo forme ondas sinusoidais dentro do espaço intramedular. Girar o perfurador ósseo pode incluir fazer com que o perfurador ósseo forme ondas helicoidais dentro do espaço intramedular. O perfurador ósseo pode ser constituído de uma liga de níquel e titânio.
[020] Em um terceiro aspecto geral, este documento apresenta outro método de limpeza ou alargamento de um espaço intramedular. O método compreende: inserir um perfurador ósseo no espaço intramedular; colocar a extremidade de ponta do perfurador ósseo em contato com uma superfície interna do espaço intramedular; e girar o perfurador ósseo de modo que o corpo afunilado seja cortado ao longo de um eixo duplo, sendo que o eixo duplo compreende um primeiro eixo correspondente ao eixo de rotação e um segundo eixo correspondente a uma trajetória de massa deslocada que gira ao redor do eixo de rotação.
[021] Em várias implantações do método, girar o perfurador ósseo pode incluir fazer com que o perfurador ósseo forme ondas sinusoidais dentro do espaço intramedular. Girar o perfurador ósseo pode incluir fazer com que o perfurador ósseo forme ondas helicoidais dentro do espaço intramedular. O perfurador ósseo pode ser constituído de uma liga de níquel e titânio.
[022] Em um quarto aspecto geral, este documento apresenta um aparelho para extrair material ósseo. O aparelho compreende: um primeiro recipiente, sendo que o primeiro recipiente compreende um cilindro aberto com um diâmetro interno e um diâmetro externo, sendo que o cilindro aberto do primeiro recipiente inclui uma extremidade proximal e uma extremidade distal, sendo que a extremidade proximal é configurada para se acoplar a um perfurador ósseo; e um segundo recipiente, sendo que o segundo recipiente compreende um cilindro aberto com um diâmetro interno e um diâmetro externo, sendo que o cilindro aberto do segundo recipiente inclui uma extremidade proximal e uma extremidade distal. O primeiro recipiente e o segundo recipiente são configurados para se engatarem de modo deslizável um com o outro de modo que, em uma configuração retraída, uma maior parte de um dos recipientes seja posicionada substancialmente dentro de uma região interior definida pelo outro recipiente, e, em uma configuração estendida, uma maior parte de cada um dos recipientes seja posicionada fora da região interior definida pelo outro recipiente.
[023] Em várias implantações do aparelho, o segundo recipiente pode ser configurado para ser móvel em uma direção axial em relação a um perfurador ósseo ao qual o aparelho é acoplado, e o primeiro recipiente pode ser configurado para ser fixo, sem ser movido na direção axial em relação ao perfurador ósseo. O diâmetro interno do segundo recipiente pode ser maior do que o diâmetro externo do primeiro recipiente, de modo que o segundo recipiente possa deslizar em relação ao primeiro recipiente entre a configuração retraída, na qual uma maior parte do primeiro recipiente está dentro de uma região interior definida pelo segundo recipiente e a configuração estendida. O primeiro recipiente pode ser acoplável de modo giratório a um perfurador ósseo. O primeiro e o segundo recipientes pode ser configurado para não girar enquanto um perfurador ósseo ao qual o aparelho é acoplado gira. Uma região interior definida pelo primeiro recipiente pode ser configurada para receber lascas ósseas que são geradas por um processo de perfuração com o uso de um perfurador ósseo ao qual o aparelho é acoplado. O primeiro e o segundo recipientes pode ser configurado para deslizar um em relação ao outro quando os recipientes são acoplados a um perfurador ósseo e quando o perfurador ósseo é avançado em um osso de modo que o segundo recipiente entre em contato com o osso. O diâmetro interno do primeiro recipiente pode ser maior do que o diâmetro externo do segundo recipiente, de modo que o primeiro recipiente possa deslizar em relação ao segundo recipiente entre a configuração retraída, na qual uma maior parte do segundo recipiente está dentro de uma região interior definida pelo primeiro recipiente e a configuração estendida.
[024] O aparelho de extração óssea pode compreender adicionalmente um terceiro recipiente. O terceiro recipiente pode compreender um cilindro aberto com um diâmetro interno e um diâmetro externo. O cilindro aberto do terceiro recipiente pode incluir uma extremidade proximal e uma extremidade distal. O terceiro recipiente pode ser configurado para se engatar de modo deslizável ao segundo recipiente de modo que, na configuração retraída, uma maior parte de dois dos recipientes seja posicionada substancialmente dentro de uma região interior definida pelo outro recipiente, e de modo que, na configuração estendida, uma maior parte de cada um dos três recipientes seja posicionada fora da região interior definida pelos outros dois recipientes.
[025] Em um quinto aspecto geral, este documento apresenta outro perfurador ósseo. O perfurador ósseo compreende uma haste que é configurada para ser fixável de modo liberável a um motor para girar o perfurador ósseo em torno de um eixo de rotação, e um corpo de perfuração que se estende a partir da haste. O corpo de perfuração inclui uma extremidade de haste onde o corpo de perfuração se estende a partir da haste e uma extremidade livre em uma extremidade do corpo de perfuração que é oposta à extremidade de haste. O corpo de perfuração inclui uma porção de corte entre a extremidade de haste e a extremidade livre. O corpo de perfuração tem um centro de massa em cada corte transversal do corpo de perfuração. Um centro de massa de um corte transversal na extremidade de haste é deslocado do eixo de rotação e um centro de massa de um corte transversal na extremidade livre é deslocado do eixo de rotação. Uma distância de um centro de massa de cada corte transversal entre a extremidade de haste e a extremidade livre é deslocada do eixo de rotação por uma distância substancialmente consistente.
[026] Em várias implantações do perfurador ósseo, os centros de massa de cortes transversais consecutivos entre a extremidade de haste e a extremidade livre formam uma trajetória de massa. Em algumas modalidades, a trajetória de massa compreende uma hélice. Em algumas modalidades, pelo menos uma porção da trajetória de massa é linear. O corpo de perfuração pode ter um diâmetro substancialmente constante da extremidade de haste até a extremidade livre, ou pode ser afunilado da extremidade de haste até a extremidade livre de modo que a extremidade de haste tenha um diâmetro de corte maior do que a extremidade livre, ou pode ser afunilado da extremidade livre até a extremidade de haste de modo que a extremidade livre tenha um diâmetro de corte maior do que a extremidade de haste. Em algumas modalidades, o corpo afunilado inclui um primeiro corte transversal e um segundo corte transversal, em que o primeiro corte transversal tem uma primeira geometria; e em que o segundo corte transversal tem uma segunda geometria diferente da primeira geometria. Em modalidades particulares, o corpo afunilado pode cortar ao longo de um eixo duplo, sendo que o eixo duplo compreende um primeiro eixo correspondente ao eixo central de rotação e um segundo eixo correspondente a uma trajetória de massa deslocada que gira ao redor do eixo central. O corpo de perfuração pode incluir um corte transversal que é assimétrico, bissimétrico, simétrico, triangular ou quadrilateral formado (incluindo formatos: trapezoide, paralelogramo e rombo).
[027] Em um sexto aspecto geral, este documento fornece o perfurador ósseo. O perfurador ósseo compreende uma haste configurada para ser fixável de modo liberável a um motor para girar o perfurador ósseo em torno de um eixo de rotação e um corpo de perfuração que se estende a partir da haste. O corpo de perfuração inclui uma extremidade de haste onde o corpo de perfuração se estende a partir da haste e uma extremidade livre em uma extremidade do corpo de perfuração que é oposta à extremidade de haste. O corpo de perfuração inclui uma porção de corte entre a extremidade de haste e a extremidade livre. O corpo de perfuração tem um centro de massa em cada corte transversal do corpo de perfuração. Um centro de massa de um corte transversal na extremidade de haste é deslocado do eixo de rotação e um centro de massa de um corte transversal na extremidade livre é deslocado do eixo de rotação.
[028] Em várias implantações do perfurador ósseo, os centros de massa de cortes transversais consecutivos entre a extremidade de haste e a extremidade livre formam uma trajetória de massa, e a trajetória de massa pode compreender uma espiral. Em algumas implantações, pelo menos uma porção da trajetória de massa é substancialmente linear. Em algumas implantações, pelo menos uma porção da trajetória de massa é curvada, e um centro de massa de um único corte transversal está no centro de rotação, ou um centro de massa de dois únicos cortes transversais está no centro de rotação. Em algumas implantações, todos os centros de massa de cada corte transversal podem estar em um plano comum. Em algumas implantações, os centros de massa de cortes transversais consecutivos entre a extremidade de haste e a extremidade livre formam uma trajetória de massa, e uma primeira porção da trajetória de massa é deslocada do eixo de rotação por uma distância substancialmente constante, enquanto uma segunda porção da trajetória de massa é deslocada do eixo de rotação por uma distância que diminui de monotonicamente.
[029] Modalidades particulares da matéria descrita neste documento podem ser implantadas para efetuar um ou mais das seguintes vantagens. Em algumas modalidades, os instrumentos de perfuração ortopédicos descritos no presente documento podem fornecer procedimentos de osteotomia mais eficientes, e procedimentos de osteotomia que são mais seguras para um paciente. Um instrumento que é tanto flexível quanto forte resiste à ruptura e danos ao paciente. Um instrumento que é flexível e tem um centro de massa deslocado de um eixo de rotação se projeta do eixo de rotação à medida que o instrumento gira em altas velocidades, tais como quando o instrumento é usado com uma ferramenta de atuador motorizado. Se o instrumento for configurado para se dobrar em uma quantidade igual em cada ângulo de rotação, o diâmetro interno de um espaço pode ser colocado em contato pelo instrumento e uniformemente limpo. O instrumento pode ser produzido para ter um diâmetro menor do que o espaço que exige limpeza, permitindo assim que uma área de acesso difícil seja acessada. Outras vantagens oferecidas pelos projetos de oscilação ou precessão incluem o contato intermitente dos canais do perfurador com o próprio osso. Se o espaço intraósseo pode ser ampliado de modo mais eficaz, o substrato ósseo é mantido mais frio para evitar ou reduzir a ocorrência de necrose óssea térmica que pode retardar ou evitar o processo de cicatrização. O contato intermitente também pode facilitar a irrigação, que também pode aprimorar a eficiência de corte do instrumento. Adicionalmente, os fragmentos ósseos podem obstruir e enguiçar o perfurador. A remoção eficiente dos fragmentos aprimora o corte, visibilidade e oferece uma oportunidade de capturar esses fragmentos ósseos para reutilização em um auto-enxerto.
[030] Dentro do contexto dos objetivos acima, novos dispositivos de extração óssea também são revelados neste documento. Os dispositivos de extração óssea revelados no presente documento são convenientes para fabricar e adaptável de trabalhar com os perfuradores ósseos revelados no presente documento, assim como com outras modalidades de perfuradores e instrumentos similares a perfurador. Os dispositivos de extração óssea podem ser reutilizáveis em algumas modalidades, e os dispositivos de extração óssea podem ser descartáveis em algumas modalidades. Os dispositivos de extração óssea revelados no presente documento são também projetados para se encaixarem prontamente em uma guia para a osteotomia e facilitar a irrigação máxima, enquanto coleta ossos de modo mais eficiente.
[031] A menos que seja definido de outra forma, todos os termos técnicos e científicos usados no presente documento têm o mesmo significado conforme comumente entendido por um indivíduo de habilidade comum na técnica a qual esta invenção pertence. Embora métodos e materiais similares ou equivalentes aos descritos no presente documento possam ser usados para praticar a invenção, métodos e materiais adequados são descritos no presente documento. Todas as publicações, pedidos de patente, patentes, e outras referências mencionadas no presente documento são incorporadas a título de referência em sua integridade. Em caso de conflito, o presente relatório descritivo, incluindo definições, terá controle. Além disso, os materiais, métodos e exemplos são ilustrativos somente e não se destinam a ser limitadores.
[032] Os detalhes de uma ou mais modalidades da invenção são apresentados nos desenhos anexos e na descrição no presente documento. Outros recursos, objetos e vantagens da invenção serão evidentes a partir da descrição e dos desenhos, e a partir das reivindicações.
[033] A Figura 1 retrata um implante dental exemplificador.
[034] As Figuras 2A e 2B retratam uma broca helicoidal comum.
[035] A Figura 2C retrata um corpo de perfuração que se dobra ou flamba por meio de força axial (compressiva).
[036] A Figura 2D retrata uma lâmina fina de um corpo de perfuração deslocado que gira ao redor do eixo de rotação.
[037] As Figuras 3A a 3E retratam várias vistas de um perfurador ósseo de deslocamento giratório de dois lados exemplificador.
[038] As Figuras 4A a C e 4F retratam um perfurador ósseo de deslocamento giratório de dois lados com uma trama que pode ser usada como uma broca piloto, pode realizar uma osteotomia em preparação para um implante dental, e também pode ser útil em uma variedade de outras aplicações ortopédicas. Essa modalidade de perfurador ósseo de deslocamento giratório de dois lados corta um envelope de corte afunilado.
[039] As Figuras 4D e 4E são vistas em corte transversal da Figura 4A tomadas nos cortes A-A e B-B, respectivamente.
[040] A Figura 4G mostra uma vista alongada de um exemplo perfurador ósseo que tem uma porção de trabalho com centros de massa que são deslocados do eixo de rotação ao longo da porção de trabalho até a ponta que é centralizada no eixo de rotação.
[041] A Figura 4H representa os centros de massa do perfurador ósseo da Figura 4G.
[042] As Figuras 4I a 4K retratam o envelope de corte do perfurador ósseo da Figura 4G que corta com um movimento de precessão.
[043] As Figuras 5A a 5C e 5F mostram um perfurador ósseo de deslocamento giratório de três lados exemplificador. Esse instrumento pode ser usado, por exemplo, como uma broca piloto, para sequestrar ossos, ou para preparar a osteotomia para colocação de implante. Em algumas modalidades, esse tipo de instrumento corta dentro de um envelope de corte afunilado.
[044] As Figuras 5D e 5E são vistas em corte transversal do perfurador ósseo de deslocamento giratório de três lados da Figura 5A a 5C.
[045] As Figuras 6A a 6C e 6F mostram vistas de um perfurador ósseo de deslocamento giratório de três lados exemplificador que é ligeiramente maior na ponta do que na extremidade de haste. Esse instrumento pode ser usado, por exemplo, para preparar uma osteotomia para colocação de implante ou usado para sequestro ósseo. Em algumas modalidades, esse tipo de instrumento é projetado para cortar um envelope de corte paralelo.
[046] As Figuras 6D e 6E são vistas em corte transversal do perfurador ósseo de deslocamento giratório de três lados das Figuras 6A a 6C.
[047] A Figura 6H é uma vista lateral da ponta do instrumento das Figuras 6A a 6F.
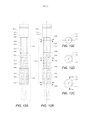
[048] A Figura 6I é uma vista de extremidade da ponta do instrumento das Figuras 6A a 6F.
[049] A Figura 6G mostra o diferencial do envelope de corte dos perfuradores ósseos das Figuras 5A-5F (um envelope de corte afunilado) em comparação ao envelope de corte dos perfuradores ósseos das Figuras 6A a 6F (um envelope de corte paralelo).
[050] As Figuras 7A1 e 7B1 mostram a ponta ativa de brocas piloto exemplificadoras que permanecerão substancialmente centralizadas quando estão em uso.
[051] As Figuras 7A-7C e 7F mostram vistas de um perfurador ósseo de deslocamento giratório de três lados exemplificador que é ligeiramente maior na ponta do que na extremidade de haste. Nessa modalidade, os centros de massa de todos os cortes transversais ao longo do comprimento de trabalho são deslocados do eixo de rotação, enquanto o ponto da ponta coincide com o eixo de rotação. Esse instrumento pode ser usado, por exemplo, para preparar uma osteotomia para colocação de implante, ou para sequestro ósseo. Em algumas modalidades, esse tipo de instrumento é projetado para cortar um envelope de corte paralelo.
[052] As Figuras 7D e 7E são vistas em corte transversal do perfurador ósseo de deslocamento giratório de três lados das Figuras 7A a 7C.
[053] As Figuras 8A a 8C e 8F mostram um exemplo de um perfurador ósseo de quatro lados deslocado que é afunilado, mas corta um envelope de corte cilíndrico. As ranhuras são angulares e emanam do núcleo radialmente.
[054] As Figuras 8D e 8E são vistas em corte transversal do perfurador ósseo de deslocamento giratório de três lados das Figuras 8A a 8C.
[055] As Figuras 9A1 a 9C1, 9A2 a 9C2, e 9F mostram vistas de um perfurador ósseo de quatro lados de deslocamento giratório exemplificador que é ligeiramente maior na ponta do que na extremidade de haste e que tem um corte transversal na forma de um paralelogramo. Nessa modalidade, o centro de massa na haste é deslocado do centro de rotação, e o centro de massa na ponta coincide com o eixo de rotação. Esse instrumento pode ser usado, por exemplo, para preparar uma osteotomia para colocação de implante, ou para sequestro ósseo. Em algumas modalidades, esse tipo de instrumento é projetado para cortar um envelope de corte paralelo.
[056] As Figuras 9D1 e 9E1 são vistas em corte transversal do perfurador ósseo de quatro lados de deslocamento giratório das Figuras. 9A1 a 9C1 e 9A2 a 9C2.
[057] As Figuras 10A a 10I mostram um aparelho de extração óssea exemplificador para uso com os instrumentos de perfuração óssea fornecidos no presente documento. Essa modalidade demonstra dois recipientes telescópicos com o maior recipiente localizado nas proximidades.
[058] As Figuras 12A a 12G mostram outro exemplo de um aparelho de extração óssea para uso com os instrumentos de perfuração óssea fornecidos no presente documento. Essa modalidade demonstra três recipientes telescópicos com o maior recipiente localizado de modo distal e um recipiente superior não perfurado.
[059] As Figuras 13A a 13G mostram outro aparelho de extração óssea exemplificador para uso com os instrumentos de perfuração óssea fornecidos no presente documento. Essa modalidade demonstra três recipientes telescópicos com o maior recipiente localizado nas proximidades e um recipiente superior não perfurado.
[060] As Figuras 14A e 14B mostram porções de ponta de perfuradores ósseos exemplificadores que têm bordas atenuadas ou laminadas e uma ponta inativa ou sem corte.
[061] A Figura 15 mostra um exemplo de um perfurador ósseo de quatro lados que tem cortes cruzados em suas hélices.
[062] A Figura 16A retrata um osso longo fraturado.
[063] A Figura 16B retrata um perfurador intramedular deslocado que prepara o espaço intramedular para preparação para um pino intramedular.
[064] A Figura 16C retrata a colocação de um pino intramedular e a fixação do osso longo em preparação para cicatrização.
[065] As Figuras 25A a 25H mostram exemplos de peças brutas para formação de perfurador a partir das quais os instrumentos de perfuração fornecidos no presente documento podem ser fabricados.
[066] Referências numéricas similares representam partes correspondentes em todo o documento.
[067] Em um primeiro contexto, este documento fornece dispositivos ortopédicos e métodos para uso dos mesmos. Por exemplo, perfuradores ósseos inovadores para preparar uma osteotomia são fornecidos. Os instrumentos de perfuração fornecidos no presente documento têm pelo menos alguns cortes transversais (perpendiculares ao eixo de rotação) com centros de massa que são deslocados do eixo de rotação dos perfuradores. O centro de massa deslocado pode permitir que os perfuradores fornecessem movimento de precessão ou formem ondas mecânicas quando estão em uso. Em um segundo contexto, este documento fornece ferramentas de perfuração de movimento de precessão para uso industrial. Por exemplo, este documento fornece brocas e métodos de uso para perfurar uma variedade de materiais que incluem, porém, sem limitação, metais, cerâmica, madeira, placa de reboco, plásticos, pedra, compósitos, sintéticos, silício e similares.
[068] Uma grande combinação de matemática e engenharia foi dedicada a modelar, estudar e resolver os problemas associados a vibrações de alta frequência e baixa frequência durante a perfuração na tentativa de aprimorar a eficiência de perfuração. Os mesmos incluem o trabalho de Yang e Jaganathan (2002), Stone e Askari (2002), Hsieh (2005) e Gupta, Ozdoganlar, Kapoor e DeVor (2003). O uso do modelo prático mais simples, Kessentini et al. usou um modelo com dois graus de liberdade para simular a vibração de brocas helicoidais em uma direção x e y. O eixo z foi o eixo de rotação longitudinal. O modelo foi usado para descrever a posição de ferramenta relativa no tempo (t). O algoritmo: foi usado para calcular a vibração radial do perfurador deduzida diretamente cerca de x(t) e y(t). Essa equação é relacionada ao Teorema de Eixo Perpendicular, que correlaciona a inércia de uma lâmina fina de um objeto (por exemplo, cilíndrico de corpo de perfuração) com coordenadas x e y. Se a inércia (I) for definida como I = mr2, então a inércia total da lâmina que gira ao redor do eixo z pode ser descrita como Iz = Ix + Iy.
foi usado para calcular a vibração radial do perfurador deduzida diretamente cerca de x(t) e y(t). Essa equação é relacionada ao Teorema de Eixo Perpendicular, que correlaciona a inércia de uma lâmina fina de um objeto (por exemplo, cilíndrico de corpo de perfuração) com coordenadas x e y. Se a inércia (I) for definida como I = mr2, então a inércia total da lâmina que gira ao redor do eixo z pode ser descrita como Iz = Ix + Iy.
[069] Ao trabalhar em coordenadas cartesianas, o momento Embora algoritmos matemáticos sejam úteis na modelagem, uma abordagem mais simplista no entendimento do valor de corte de precessão e projetos deslocados é a avaliação do momento de inércia de um cilindro de raio r e seu raio associado de giro Rg fazendo com que a explicação de mudanças de inércia se tornem mais compreensíveis.
Embora algoritmos matemáticos sejam úteis na modelagem, uma abordagem mais simplista no entendimento do valor de corte de precessão e projetos deslocados é a avaliação do momento de inércia de um cilindro de raio r e seu raio associado de giro Rg fazendo com que a explicação de mudanças de inércia se tornem mais compreensíveis.
[070] O raio de giro Rg é um parâmetro conveniente, que fornece uma medida da resistência de um corte transversal para flambagem lateral conforme mostrado pelo deslocamento x na Figura 2C, ou uma indicação da dureza de um corte com base no formato do corte transversal quando usado sob pressão ou compressão P (por exemplo, um cilíndrico de corpo de perfuração).
[071] Em geral, o membro s^ dobrará no plano mais fino ir e em uma área de menos ; ; expresso pela fórmula: onde I = momento de área, e A = área de material no corte transversal.
; expresso pela fórmula: onde I = momento de área, e A = área de material no corte transversal.
[072] Desse modo, o raio ou giro, e, desse modo, a resistência à flambagem e/ou distorção, aumenta à medida que o momento de inércia de uma dada massa em um dado sistema de coordenadas aumenta. O momento de inércia pode ser calculado para qualquer corpo rígido que passa por uma rotação física em torno de um eixo fixo. Isso se baseia não somente no formato físico do objeto e sua distribuição de massa, mas também na configuração específica de como o objeto gira. Então o mesmo objeto que gira de diferentes maneiras teria um momento diferente de inércia em cada situação. A fórmula ger; AL_, „ representa o conceito mais básico para o momento de inércia. Basicamente, para qualquer objeto giratório, o momento de inércia pode ser calculado tomando-se distância de cada partícula do eixo de rotação (r na equação), quadrando esse valor (o termo r2), e multiplica-lo pela massa dessa partícula. Isso é feito for todas as partículas que compõem o objeto giratório, e combinar os resultados proporciona o momento de inércia.
representa o conceito mais básico para o momento de inércia. Basicamente, para qualquer objeto giratório, o momento de inércia pode ser calculado tomando-se distância de cada partícula do eixo de rotação (r na equação), quadrando esse valor (o termo r2), e multiplica-lo pela massa dessa partícula. Isso é feito for todas as partículas que compõem o objeto giratório, e combinar os resultados proporciona o momento de inércia.
[073] A consequência dessa formula é que o mesmo objeto obtém um momento diferente de valor de inércia, dependendo de como o mesmo gira e onde o mesmo está localizado no espaço. Um novo eixo de rotação e/ou um novo centroide termina com uma fórmula diferente, mesmo se o formato físico do objeto permanecer o mesmo. Desse modo, quanto mais longe as coordenadas x e y para o movimento de r na direção oposta do eixo de rotação e/ou do centroide, maior o valor da inércia rotacional I.
[074] No caso de um cilindro sólido, a expressão para o momento de inércia pode ser extrapolada visualizando-se lâmina fina e é expressa como: onde, M é a massa e dm é a massa diferencial. Novamente, a partir das equações acima, torna-se claro que o momento de inércia aumenta à medida que o raio do centroide aumenta.
onde, M é a massa e dm é a massa diferencial. Novamente, a partir das equações acima, torna-se claro que o momento de inércia aumenta à medida que o raio do centroide aumenta.
[075] O teorema de eixo paralelo, também conhecido como o teorema de Huygens-Steiner, que foi empregado no século XVII para descrever o movimento planetário, é especialmente útil para avaliar o aprimoramento na inércia com o uso de centros de massa deslocados. Uma lâmina de um cilíndrico de corpo de perfuração deslocado é mostrada na Figura 2D. Pode-se escrever a fórmula para o teorema de eixo paralelo em sua fórmula mais simples como I = Icm + md2. Aqui Icm é o momento de inércia de um corpo de massa m em relação a uma linha através de seu centroide cm, I é o momento de inércia total em relação a uma linha paralela ao eixo central ou eixo de rotação, e d é a distância entre as duas linhas. Desse modo, para uma dada lâmina, inércia total I (e a resistência à dobra e distorção) pode ser aprimorada por aprimoramentos tanto na massa de um corte transversal quanto em um aumento exponencial na distância do eixo central ao centroide.
[076] Desse modo, aprimoramentos em inércia de torção (e resistência à dobra) pode ser concluída por um deslocamento modesto da área de corte transversal na direção oposta do eixo central sem aumentar substancialmente a massa ou (no caso de uma broca helicoidal) a espessura do núcleo ou trama.
[077] Em algumas modalidades, os perfuradores e/ou escareadores descritos no presente documento têm um ou mais cortes transversais com um centroide (centro de massa) que é deslocado do eixo de rotação do perfurador. O centro de massa deslocado permite que esses perfuradores e/ou escareadores forneçam movimento de precessão, e/ou forme ondas mecânicas durante rotação. A marca de dispositivos de corte de precessão é o contato intermitente das bordas de corte dos canais com as paredes do substrato à medida que o mesmo é cortado ou perfurado, que tem o potencial de reduzir ou eliminar a vibração tanto em uma direção axial quanto em uma direção torcional. Diferente dos projetos de perfuradores anteriores, os perfuradores e/ou escareadores fornecidos no presente documento cumprem as mesmas funções que os perfuradores orbitais, mas podem ser usados em um perfurador ou eixo giratório padrão.
[078] Perfuradores e/ou escareadores de precessão podem criar envelopes de corte com áreas de corte transversal que são maiores do que pelo menos algumas das áreas de corte transversal do próprio perfurador ou escareador, e são, portanto, mais leves e exigem menos energia para operar. Os mesmos também têm maiores ângulos de folga com capacidade de arraste aprimorada, o que também aprimora a eficiência de corte.
[079] Outras vantagens oferecidas por perfuradores e/ou escareadores de precessão são o contato intermitente dos canais do dispositivo com o substrato que tornam a peça de trabalho mais fria e menos suscetível à distorção. O contato intermitente também pode facilitar maiores volumes de irrigante ou agente de resfriamento quando o controle de temperatura é obrigatório, por exemplo, durante a perfuração de cerâmica, vidro e silício, aprimorando também a eficiência de corte. Além disso, os perfuradores e/ou escareadores descritos no presente documento, quando fabricados a partir de um liga flexível ou superflexível, pode engendrar movimento corpóreo ou deflexão, que podem ser particularmente úteis em perfurar e/ou escarear espaços irregulares ou espaços com algum grau de curvatura.
[080] Neste documento, o termo “deslocamento” se refere a uma configuração de um instrumento de corte (por exemplo, um perfurador, escareador e similares) em que o centroide de um ou mais cortes transversais do instrumento de corte são separados do eixo de rotação do instrumento de corte. A combinação de múltiplos centroides de cortes transversais consecutivos de um instrumento de corte define uma “trajetória de centro de massa” do instrumento de corte. Conforme será descrito adicionalmente abaixo, a trajetória de centro de massa dos instrumentos de corte fornecidos no presente documento pode ser parcial ou completamente deslocada do eixo de rotação dos instrumentos de corte. Adicionalmente, as trajetórias de centro de massa deslocadas, ou porções das mesmas, podem ter várias configurações. Por exemplo, algumas trajetórias de centro de massa deslocadas, ou porções das mesmas são lineares. Algumas trajetórias de centro de massa deslocadas, ou porções das mesmas, são curvadas (por exemplo, uma única curva, ou múltiplas curvas tais como uma onda em formato de S ou senoidal). Algumas trajetórias de centro de massa deslocadas, ou porções das mesmas, são helicoidais ou têm um formato de saca-rolha. Deve-se entender que combinações de tais trajetórias de centro de massa podem ser combinadas em um único instrumento de corte. Por exemplo, um único instrumento de corte pode ter uma ou mais porções que têm uma trajetória de centro de massa que são coincidentes com o eixo de rotação, e uma ou mais outras porções que têm trajetórias de centro de massa que são deslocadas. Além disso, tal uma ou mais outras porções que têm trajetórias de centro de massa que são deslocadas podem ter configurações similares ou dissimilares. Por exemplo, uma primeira porção de trajetória de centro de massa deslocada pode ser linear, enquanto uma segunda trajetória de centro de massa deslocada pode ser curvada, helicoidal, em formato de saca-rolha e similares. Deve-se entender que quaisquer tais combinações e permutações de trajetórias de centro fora de massa são antevistos e estão dentro do escopo desta revelação.
[081] Além disso, deve-se entender que os instrumentos de corte fornecidos no presente documento podem ser completamente ou podem ter porções que têm um perfil cilíndrico, um perfil afunilado, um perfil multiafunilado e similares e qualquer combinação e subcombinação dos mesmos. Por exemplo, algumas modalidades fornecidas no presente documento têm um perfil multiafunilado que significa que uma primeira porção do instrumento de corte tem um cone diametral em uma primeira taxa de cone, e o instrumento de corte tem uma ou mais outras porções que têm um cone diametral em uma taxa que é diferente da primeira taxa de cone. Deve-se entender que instrumentos de corte que têm qualquer combinação e permutação de porções com um perfil afunilado, um perfil multiafunilado e similares são antevistos e estão dentro do escopo desta revelação. Por exemplo, um único instrumento de corte pode ter uma primeira porção que tem um perfil cilíndrico, uma segunda porção que tem um perfil multiafunilado, e uma ou mais porções adicionais que têm um perfil cilíndrico ou outro perfil formado.
[082] A Figura 1 retrata um implante dental 20 que é colocado na mandíbula ou maxilar 15 que segue uma osteotomia, que é realizada com o uso de um perfurador ósseo de várias modalidades descritas no presente documento.
[083] As Figuras 2A e 2B fornecem um exemplo de uma broca helicoidal 200 padrão conforme descrito adicionalmente na seção de Antecedentes acima.
[084] As Figuras 3A a 6E ilustram várias implantações do perfurador ósseo. Um recurso comum dessas implantações é que os centros de massa dos cortes transversais estão mais distantes do eixo de rotação na extremidade de haste da porção de trabalho do que na extremidade livre ou extremidade de ponta da porção de trabalho. O deslocamento do centro de massa do eixo de rotação pode diminuir de monotonicamente, por exemplo, de modo linear, a partir da extremidade de haste à extremidade de ponta. Visto que o formato de corte transversal da porção de trabalho gira da extremidade de haste à extremidade de ponta, os centros de massa dos cortes transversais formam uma trajetória em espiral do diâmetro decrescente (da haste para a ponta) ao redor do eixo de rotação. Embora as implantações das Figuras 3A a 6E sejam ilustradas com o centro de massa na extremidade de ponta da porção de trabalho localizado no eixo de rotação, isso não é necessário; o centro de massa na extremidade de ponta da porção de trabalho pode permanecer ligeiramente deslocado do eixo de rotação (embora não tanto quanto a extremidade de haste).
[085] O diâmetro da porção de trabalho pode ser substancialmente constante da haste à extremidade de ponta, ou pode se estreitar ligeiramente, por exemplo, em ângulo de menos do que 10 graus, menos do que 5 graus, ou menos do que 1 grau, a partir do eixo de rotação.
[086] Após a porção de trabalho do perfurador, o perfurador se estreita subitamente para formar uma ponta angulada. Por exemplo, em algumas modalidades a ponta pode ter um ângulo de ponto de cerca de 60 a 75 graus, 75 a 90 graus, 90 a 105 graus, 105 a 120 graus, 120 a 135 graus, cerca de, 135 a 150 graus, ou maior do que 150 graus.
[087] As Figuras 3A a 3E ilustram um perfurador ósseo de deslocamento giratório de dois lados exemplificador 310. O perfurador ósseo 310 é descrito como um perfurador ósseo “deslocado” devido ao fato de que os centros de massa dos cortes transversais (por exemplo, centros de massa 330a e 330b das Figuras 3C e 3D, respectivamente) ao longo da porção de trabalho 312 são deslocados do eixo de rotação 305 do perfurador ósseo 310. Conforme mostrado na vista em corte transversal 3C, o deslocamento começa na haste 311, e migra da haste 311 até a ponta 320, até que o centro de massa se torne completamente centralizado no eixo de rotação 305 na extremidade de ponta 320 do instrumento 310.
[088] Esse perfurador 310 apresenta uma trama estreita 335 para sequestro ou extração óssea. O perfurador 310 define dois canais 320A e 320B que, em relação ao centro de massa, são substancialmente bissimétricos no corte transversal, e que podem ser utilizados para remover ossos. Um encaixe, que é adequado para se acoplar de modo liberável a um atuador de motor acionado por mecanismos com uma peça manual e mandril, ou um manípulo utilizado para atuação manual, pode ser anexado de modo fixo à haste 311 o instrumento de perfuração óssea 310 é adequado, por exemplo, para uso como uma broca piloto, para realizar uma osteotomia em preparação para um implante dental, e para uso em uma variedade de outras aplicações ortopédicas. O perfurador ósseo 310 corta um envelope de corte afunilado devido ao fato de que dos centros de massa deslocados.
[089] As Figuras 4A a 4F ilustram outra modalidade exemplificativa dos perfuradores ósseos fornecida no presente documento. O instrumento de perfuração óssea 410 retratado inclui uma haste 411, uma extremidade livre ou ponta 413, e uma porção de trabalho 412 entre os mesmos. Em algumas modalidades, o diâmetro da porção de trabalho 412 é ligeiramente afunilado, ou seja, diminuindo em diâmetro da haste 411 até a ponta 413. Em outras modalidades, o diâmetro da porção de trabalho 412 é consistente ao longo da porção de trabalho 412.
[090] O perfurador 410 define dois canais 420A e 420C que são relativamente bissimétricos no corte transversal, e que podem ser utilizados para remover osso. Conforme será descrito adicionalmente, o perfurador ósseo 410 corta uma cavidade óssea ou prepara uma osteotomia que é afunilada.
[091] Um encaixe 415, que é adequado para se acoplar de modo liberável a um atuador de motor acionado por mecanismos com uma peça manual e mandril, ou um manípulo utilizado para atuação manual, pode ser anexado de modo fixo à haste 411.
[092] A ponta 413 pode incluir uma superfície ativa ou de corte que é confluente com a porção de trabalho 412 (por exemplo, como as pontas mostradas nas Figuras 7A1 e 7B1). Alternativamente, a ponta projetante 413 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 412 (por exemplo, como a ponta mostrada nas Figuras 14A e 14B).
[093] O MxFD (diâmetro de canal máximo) 417 do perfurador ósseo 410 é localizado próximo à extremidade de haste 411 da porção de trabalho 412. O MnFD (diâmetro de canal mínimo) 418 é localizado próximo à ponta 413. A haste 411 acima da porção de trabalho 412 é essencialmente cilíndrica e tem um diâmetro ligeiramente maior do que a superfície de corte no MxFD 417. Em referência em particular às Figuras 4D a 4F, aqueles versados na técnica reconhecerão que o centro de massa de um corte transversal no MxFD 417 é deslocado do eixo de rotação 440 do perfurador ósseo 410. No entanto, o centro de massa de um corte transversal no MnFD 418 está situado no eixo de rotação 440 ou coincide com o mesmo.
[094] Conforme mostrado nas Figuras 4A a 4F, o perfurador ósseo 410 define dois canais helicoidais contínuos 420A e 420C. Os canais 420A e 420C são sulcos substancialmente côncavos que seguem a circunferência da porção de trabalho 412 como espirais entre a haste 411 e a ponta projetante 413 para definir círculos concêntricos. Os canais 420A e 420C ocorrem alternativamente com os apoios 420B e 420D. Em algumas modalidades, os canais 420A e 420C têm um passo uniforme ao longo do eixo longitudinal. Em outras modalidades, os canais 420A e 420C podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 413. O número total de voltas por canal dos canais 420A e 420C entre o MxFD 417 e o MnFD 416 podem depender do comprimento total da porção de trabalho 412, mas não é menor do que um quarto de uma revolução completa. Canais helicoidais 420A e 420C se originam, cada um, no MxFD 417 em locais separados que são igualmente separados em torno da circunferência da haste 411, ou mais especificamente em 180 graus de separação para dois canais.
[095] Conforme melhor observado nas Figuras 4D e 4E, os canais 420A e 420C são definidos por ranhuras em formato de J 421A e 421C. As ranhuras em formato de J, 421A e 421C se cruzam com os apoios 420B e 420D para formar bordas de corte helicoidais 425A e 425C que se estendem da periferia da haste 411 até a ponta 413. As ranhuras em formato de J, 421A, 421C e os apoios 420B, 420D compreendem as superfícies de uma trama ou núcleo 426 do perfurador 410. As áreas de folga radial, ou cortes, dos canais 421A e 421C contornam uma porção da trama ou núcleo 426. Essas áreas de folga são designadas por numerais 430A e 430C. No corte transversal da haste 411 até a ponta 413, as ranhuras 421A e 421C de canais de corte 420A e 420C formam áreas de folga em formato de lágrimas de profundidade variável. As superfícies de corte 425A e 425C e as ranhuras das paredes internas 421A e 421C circunscrevem áreas de folga 430A e 430C.
[096] Também em referência às Figuras 4D e 4E, pode-se observar que as ranhuras geralmente em formato de J, 421A e 421C cruzam a periferia da haste 411 nos pontos 431A e 431C. Essas interseções possuem distâncias iguais afastadas, ou em 180° de separação que formam um ângulo de corte neural (ou um ângulo de 90° à tangente do perímetro de haste 411). É reconhecido que esse ângulo de corte pode ser tanto negativo como positivo (ou seja, menor ou maior do que 90° à tangente do perímetro da haste 411). É antevisto que, para criar várias modalidades dos perfuradores ósseos fornecidos no presente documento, as ranhuras 421A e 421C podem ser variadas em profundidade e formato, e podem ter qualquer uma dentre uma miríade de diferentes configurações. Por exemplo, embora as ranhuras 421A e 421C tenham formato de J, em algumas modalidades, as ranhuras 421A e 421C são ranhuras em formato de S (por exemplo, conforme mostrado na modalidade da Figura 5A), e podem ser individualmente simétricos ou assimétricos, e podem ser imagens espelhadas uma da outra. Embora a profundidade e o formato de cada ranhura 421A e 421C possam variar, o diâmetro de corte transversal da porção de núcleo 426 é geralmente não mais estreito do que cerca de 20% do diâmetro da haste 411.
[097] Conforme declarado acima, o perfurador ósseo 410 é uma modalidade de perfurador ósseo de deslocamento giratório de dois lados exemplificador. Em relação ao recurso de deslocamento, e também em referência às Figuras 4D-4F, o perfurador 410 tem uma linha central ou eixo de rotação 440 (ao redor da qual o perfurador 410 gira quando está em uso), e um eixo de massa 441 que não coincide completamente com o eixo de rotação 440. O eixo de massa 441 é uma linha definida pelos centros de massa de áreas de corte transversal do perfurador ósseo 410. O deslocamento é a diferença entre o eixo de massa 441 e o eixo de rotação 440 (que são deslocados em uma distância 442 um do outro). A distância de deslocamento 442 diminui continuamente da haste 411 até a ponta 413, e é zero no ponto final 446. Esse recurso de deslocamento exclusivo permite que o instrumento 410 corte com o uso de um movimento de precessão. Consequentemente, o perfurador ósseo 410 corta uma cavidade óssea ou prepara uma osteotomia que é afunilada.
[098] As Figuras 4G a 4K ilustram a característica do perfurador ósseo 410 para cortar com o uso de movimento de precessão. Conforme mencionado anteriormente, precessão descreve o movimento que ocorre sempre que o eixo em torno do qual um corpo gira, por si só, gira em torno de outro eixo . Conforme mostrado na Figura 4H, o eixo de rotação 440 teórico e o eixo de massa 441 são deslocados um do outro. A quantidade de deslocamento entre o eixo de rotação 440 e o eixo de massa 441 é definida pela distância entre esses dois eixos geométricos, e a distância de deslocamento variam ao longo do comprimento do perfurador. Devido ao fato de ter centros de massa que são deslocados do eixo de rotação 440, o perfurador 410 exibe um fenômeno durante a rotação que é conhecido como precessão ou, no vernáculo, oscilação. No caso de perfuradores deslocados, o eixo de precessão é substancialmente “inerente” ou limitado ao projeto e não controlados por variáveis externas. Construindo-se o eixo de precessão no perfurador deslocado, o ângulo de precessão, e, portanto, a ação de corte pode ser controlada de modo preciso.
[099] Com velocidade angular adequada e um centro de massa deslocado suficiente, um perfurador deslocado pode experimentar acelerações angulares, que pode, por sua vez, produzir movimentos corporais radiais do perfurador. Isso ocorre devido ao fato de que o vetor de força centrífuga F = ma (ou a força é igual à massa vezes aceleração) desloca os centroides do perfurador radialmente em uma extensão que é limitada pela constante de mola para o perfurador conforme definido pela lei de Hooke F = -kx (em que k é a constante de mola e x é o comprimento de unidade de deflexão). Em qualquer caso, o corte ao longo de um eixo de precessão é concluído deslocando-se o centroide ou centro de massa da área de corte transversal geométrico em um comprimento de unidade do perfurador 410 do eixo ou do centro de rotação 440 do perfurador 410. A aplicação da teoria de onda simples também pode ser útil no entendimento do movimento de precessão dos perfuradores ósseos fornecidos no presente documento.
[100] Também em referência ao perfurador alongado 410, e conforme uma descrição adicional das propriedades do perfurador 410, a trajetória de corte arqueada pode ser associada a uma onda de amplitude x (em referência à Figura 4H). Desse modo, a distância total percorrida por qualquer ponto no arco se iguala 2x, o que define o diâmetro de corte para esse ponto.
[101] Em referência continuada às Figuras 4I a 4K, também pode ser antevisto que o corte ocorre alternativamente e que nenhum ângulo de corte se engata às paredes ósseas imediatamente opostas uma das outras em qualquer um tempo. Esse recurso permite que o instrumento 410 crie grandes envelopes de corte enquanto usa de um perfurador 410 com áreas de corte transversal menores. Aqueles versados na técnica verificarão que essa propriedade aprimora a flexibilidade de perfuração, reduz a fadiga cíclica, mitiga a ligação ou trava de cone (o efeito de aparafusamento), e mitiga o transporte na direção oposta do eixo cortado destinado ou da anatomia original do espaço no caso de escareamento.
[102] As Figuras 5A a 5F ilustram outro perfurador ósseo 510 exemplificador. O perfurador ósseo 510 é um exemplo de uma modalidade de perfurador ósseo de deslocamento giratório de três lados. O perfurador ósseo de deslocamento 510 tem três lados, tem corte transversal geralmente triangular, e pode ser utilizado para remover osso. O instrumento de perfuração óssea 510 inclui uma haste 511, uma extremidade livre ou ponta 513 e uma porção de trabalho 512 entre as mesmas. O diâmetro da porção de trabalho 512 é ligeiramente afunilado, ou seja, diminuir em diâmetro da haste 511 até a ponta 513. Alternativamente, o diâmetro da porção de trabalho 512 pode permanecer substancialmente constante ao longo do comprimento da porção de trabalho 512. A porção de trabalho 512 do perfurador 510 define três canais 520A, 520B e 520C. Conforme será descrito adicionalmente, o perfurador ósseo 510 corta uma cavidade óssea ou prepara uma osteotomia que é afunilada.
[103] Um encaixe 515, que é adequado para se acoplar de modo liberável a um motor acionado por mecanismo com uma peça manual e mandril, ou um manípulo utilizado para instrumentação manual, pode ser fixado à haste 511.
[104] A ponta 513 pode incluir uma superfície ativa ou de corte que é confluente à porção de trabalho 512. Alternativamente, a ponta projetante 513 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 512 (por exemplo, como a ponta mostrada nas Figuras 14A e 14B).
[105] O MxFD 517 é localizado próximo à extremidade de haste 511 da porção de trabalho 512. O MnFD 518 é localizado próximo à ponta 513. A haste 511 acima da porção de trabalho 512 é essencialmente cilíndrica e exibe um diâmetro ligeiramente maior do que a superfície de corte no MxFD 517. Em referência em particular às Figuras 5D a 5F, aqueles versados na técnica reconhecerão que o centro de massa de um corte transversal no MxFD 517 é deslocado do eixo de rotação 540 do perfurador ósseo 510. No entanto, o centro de massa de um corte transversal no MnFD 518 coincide com o eixo de rotação 540.
[106] Conforme mostrado nas Figuras 5A a 5F, o perfurador ósseo 510 define três canais helicoidais contínuos 520A, 520B e 520C. Os canais 520A, 520B e 520C são sulcos substancialmente côncavos que seguem a circunferência da porção de trabalho 512 como espirais entre a haste 511 e a ponta projetante 513 para definir círculos concêntricos. Em algumas modalidades, os canais 520A, 520B e 520C podem ser equidistantes uns dos outros. Em modalidades particulares, os canais 520A, 520B e 520C podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 513. O número total de voltas por canal dos canais 520A, 520B e 520C do MxFD 517 ao MnFD 516 pode depender do comprimento total da porção de trabalho 512, mas não é menor do que um quarto de uma revolução completa. Os canais helicoidais 520A, 520B e 520C se originam, cada um, no MxFD 517 em locais separados que são igualmente separados ao redor da circunferência da haste 511, ou mais especificamente em 120 graus de separação.
[107] Conforme melhor observado nas Figuras 5D e 5E, os canais 520A, 520B e 520C são definidos por superfícies de ranhuras em formato de S, 521A, 521B e 521C. Os canais 520A, 520B, e 520C se cruzam para formar bordas de corte helicoidais 525A, 525B, e 525C entre a periferia da haste 511 e ponta 513. Os canais helicoidais 520A, 520B, e 520C cooperam para formar uma trama ou núcleo 526, que é essencialmente triangular. As áreas de folga radial ou cortes 530A, 530B e 530C dos canais 521A, 521B e 521C contornam a trama ou núcleo 526. No corte transversal da haste 511 até a ponta 513, as ranhuras 521A, 521B e 521C dos canais de corte 520A, 520B e 520C formam áreas de folga formadas arqueadas de profundidade variável. As bordas de corte 525A, 525B e 525C e as ranhuras das paredes internas 521A, 521B e 521C circunscrevem áreas de folga 530A, 530B e 530C.
[108] Também em referência às Figuras 5D e 5E, pode-se observar que as ranhuras em formato de S, 521A, 521B e 521C cruzam a periferia da haste 511 nos pontos 531A, 531B e 531C. Em algumas modalidades, essas interseções são distâncias igualmente afastadas, e em 120° de separação para formar um ângulo de corte neural (ângulo de 90° à tangente do perímetro de haste 511) ou ângulo de inclinação ligeiramente positivo (maior do que 90° à tangente do perímetro da haste 511). Deve-se reconhecer que esse ângulo de corte pode ser tanto negativo como positivo (ou seja, menor ou maior do que 90° à tangente do perímetro da haste 511). Nessa modalidade, as linhas traçadas para conectar pontos 531A, 531B e 531C formam um triângulo equilátero. No entanto, aqueles versados na técnica reconhecerão também que pontos 531A, 531B e 531C podem ser separados variando- se graus e/ou distâncias que tornam o corte transversal embora triangular, assimétrico (por exemplo, em 110, 125 e 125 graus de separação, ou em outros graus de separação). Também será reconhecido que ranhuras 521A, 531B e 521C pode ser variável em profundidade e formato e pode ter qualquer uma dentre uma miríade de diferentes configurações.
[109] Nesse perfurador ósseo 510 exemplificador, as ranhuras 521A, 521B e 521C têm formato de S e são individualmente simétricas. O bissetor de cada ranhura divide a ranhura igualmente em segmentos convexos e um côncavo que formam o perfil em formato de S. As linhas que atravessam cada ranhura 521A, 521B e 521C podem ser traçadas ao centroide do núcleo 526 e têm comprimento igual. Além disso, um bissetor alternativo pode ser traçado do ponto central de bissetor de cada ranhura 521A, 521B e 521C através da maior concavidade à ranhura adjacente 521A, 521B e 521C. As linhas traçadas perpendiculares às linhas de bissetor alternativo formam um triângulo equilátero. Os bissetores para cada ranhura 521A, 521B e 521C são iguais. A maior profundidade de cada ranhura pode ser definida por um segmento de Ia (em referência às Figuras 5D e 5E). Essas profundidades podem variar e, ademais, podem ser calculadas como uma porcentagem do comprimento de Ia. As maiores profundidades de ranhuras 521A, 521B e 521C, indicadas com segmentos de linha demarcados 537A, 537B e 537C, são cerca de 15%, 20% ou 25% do comprimento de Ia, respectivamente. As maiores convexidades das ranhuras 521A, 521B e 521C são imagens espelhadas das maiores concavidades das mesmas ranhuras. Embora a profundidade e altura de cada ranhura 521A, 521B e 521C pode variar, o diâmetro de corte transversal da porção de núcleo 526 é geralmente não mais estreito do que cerca de 20% do diâmetro da haste 511.
[110] Conforme declarado acima, o perfurador ósseo 510 é um exemplo de uma modalidade de perfurador ósseo de deslocamento giratório de três lados. Em relação ao recurso de deslocamento, e também em referência às Figuras 5D a 5F, o perfurador 510 tem uma linha central ou eixo de rotação 540 (em torno do qual o perfurador 510 gira quando está em uso), e um eixo de massa 541 que não coincide com o eixo de rotação 540. O eixo de massa 541 é uma linha definida pelos centros de massa de áreas de corte transversal consecutivas do perfurador ósseo 510. O deslocamento é a diferença entre o eixo de massa 541 e o eixo de rotação 540 (que são deslocados em uma distância 542 um do outro). A distância de deslocamento 542 diminui continuamente da haste 511 até a ponta 513, e é zero no ponto final 546. Esse recurso de deslocamento exclusivo permite que o instrumento 510 corte com um movimento de precessão. Consequentemente, o perfurador ósseo 510 corta uma cavidade em osso ou prepara uma osteotomia que é afunilada.
[111] As Figuras 6A a 6F ilustram outro perfurador ósseo 610 exemplificador. O perfurador ósseo 610 é outro exemplo de uma modalidade de perfurador ósseo de deslocamento giratório de três lados. O perfurador ósseo de deslocamento 610 tem três lados, tem corte transversal geralmente triangular, e pode ser utilizado para remover osso. O instrumento de perfuração óssea 610 inclui uma haste 611, uma extremidade livre ou ponta 613, e uma porção de trabalho 612 entre as mesmas. O diâmetro da porção de trabalho 612 é ligeiramente afunilado, ou seja, aumenta em diâmetro da haste 611 até a ponta 613. Alternativamente, o diâmetro da porção de trabalho 612 pode permanecer substancialmente constante ao longo do comprimento da porção de trabalho 612. A porção de trabalho 612 do perfurador 610 define três canais 620A, 620B e 620C. Conforme será descrito adicionalmente, o perfurador ósseo 610 corta uma cavidade óssea ou prepara uma osteotomia que é geralmente cilíndrica.
[112] Um encaixe 615, que é adequado para se acoplar de modo liberável a um motor acionado por mecanismo com uma peça manual e mandril, ou um manípulo utilizado para instrumentação manual, pode ser fixado à haste 611.
[113] A ponta 613 pode incluir uma superfície ativa ou de corte que é confluente à porção de trabalho 612 (por exemplo, como a ponta mostrada nas Figuras 7A1 e 7B1).
[114] Alternativamente, a ponta projetante 613 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 612 (por exemplo, como a ponta mostrada nas Figuras 14A e 14B).
[115] O MnFD 617 é localizado próximo à extremidade de haste 611 da porção de trabalho 612. O MxFD 618 é localizado próximo à ponta 613. A haste 611 acima da porção de trabalho 612 é essencialmente cilíndrica e exibe um diâmetro ligeiramente maior do que a superfície de corte no MnFD 617. Em referência in particular às Figuras 6D a 6F, aqueles versados na técnica reconhecerão que o centro de massa de um corte transversal no MnFD 617 é deslocado do eixo de rotação 640 do perfurador ósseo 610. No entanto, o centro de massa de um corte transversal no MxFD 618 coincide com o eixo de rotação 640.
[116] Conforme mostrado nas Figuras 6A a 6F, o perfurador ósseo 610 define três canais helicoidais contínuos 620A, 620B e 620C. Os canais 620A, 620B e 620C são sulcos substancialmente côncavos que seguem a circunferência da porção de trabalho 612 como espirais entre a haste 611 e a ponta projetante 613 para definir círculos concêntricos. Em algumas modalidades, os canais 620A, 620B e 620C podem ser equidistantes um do outro. Em algumas modalidades, os canais 620A, 620B e 620C podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 613. O número total de voltas por canal dos canais 620A, 620B e 620C de MnFD 617 ao MxFD 616 pode depender do comprimento total da porção de trabalho 612, mas não é menor do que um quarto de uma revolução completa. Os canais helicoidais 620A, 620B e 620C se originam, cada um, no MnFD 617 em locais separados que são igualmente separados ao redor da circunferência da haste 611, ou mais especificamente em 120 graus de separação. Cada estrutura helicoidal do perfurador ósseo 610, isto é, a massa entre os canais 620A, 620B e 620C e que definem os canais 620A, 620B e 620C, é contínua ao longo do comprimento da superfície de corte 612 da haste 611 até a ponta projetante 613.
[117] Também em referência às Figuras 6D e 6E, pode-se observar que as ranhuras em formato de S, 621A, 621B e 621C cruzam a periferia da haste 611 em pontos 631A, 631B e 631C. Em algumas modalidades, essas interseções são distâncias igualmente afastadas, e em 120° de separação para formar um ângulo de corte neural (ângulo de 90° à tangente do perímetro de haste 611) ou ângulo de inclinação ligeiramente positivo (maior do que 90° à tangente do perímetro da haste 611). Deve-se reconhecer que esse ângulo de corte pode ser tanto negativo como positivo (ou seja, menor ou maior do que 90° à tangente do perímetro da haste 611). Nessa modalidade, as linhas traçadas para conectar pontos 631A, 631B, e 631C formam um triângulo equilátero. No entanto, aqueles versados na técnica reconhecerão também que os pontos 631A, 631 B, e 631C podem ser separados variando-se graus e/ou distâncias que tornam o corte transversal embora triangular, assimétrico (por exemplo, em 110, 125 e 125 graus de separação, ou em outros graus de separação). Também será reconhecido que as ranhuras 621A, 631B e 621C podem ser variáveis em profundidade e formato e podem ter qualquer uma dentre uma miríade de diferentes configurações.
[118] Nesse perfurador ósseo 610 exemplificador, as ranhuras 621A, 621B e 621C têm formato de S e são individualmente simétricas. O bissetor de cada ranhura divide a ranhura igualmente em segmentos convexos e um côncavo que formam o perfil em formato de S. As linhas que atravessam cada ranhura 621A, 621B e 621C podem ser traçadas ao centroide do núcleo 626 e têm comprimento igual. Além disso, um bissetor alternativo pode ser traçado do ponto central de bissetor de cada ranhura 621A, 621B e 621C através da maior concavidade à ranhura adjacente 621A, 621B e 621C. As linhas traçadas perpendiculares às linhas de bissetor alternativo formam um triângulo equilátero. Os bissetores para cada ranhura 621A, 621B e 621C são iguais. A maior profundidade de cada ranhura pode ser definida por um segmento de Ia (em referência às Figuras 6D e 6E). Essas profundidades podem variar e, além disso, podem ser calculadas como uma porcentagem do comprimento de Ia. As maiores profundidades de ranhuras 621A, 621B e 621C, indicados com segmentos de linha demarcados 637A, 537B, e 537C, são cerca de 15%, 20% e 25% do comprimento de Ia, respectivamente. As maiores convexidades de ranhuras 621A, 621B e 621C são imagens espelhadas das maiores concavidades das mesmas ranhuras. Embora a profundidade e altura de cada ranhura 621A, 621B e 621C possa variar, o diâmetro de corte transversal da porção de núcleo 626 é geralmente não mais estreito do que cerca de 20% do diâmetro da haste 611.
[119] Conforme declarado acima, o perfurador ósseo 610 é um exemplo de uma modalidade de perfurador ósseo de deslocamento giratório de três lados. Em relação ao recurso de deslocamento, e também em referência às Figuras 6D a 6F, o perfurador 610 tem uma linha central ou eixo de rotação 640 (em torno do qual o perfurador 610 gira quando está em uso), e um eixo de massa 641 que não coincide com o eixo de rotação 640. O eixo de massa 641 é uma linha definida pelos centros de massa de áreas de corte transversal consecutivas do perfurador ósseo 610. O deslocamento é a diferença entre o eixo de massa 641 e o eixo de rotação 640 (que são deslocados em uma distância 642 um do outro). A distância de deslocamento 642 diminui continuamente da haste 611 até a ponta 613, e é zero no ponto final 646. Esse recurso de deslocamento exclusivo permite que o instrumento 610 corte com um movimento de precessão. Consequentemente, o perfurador ósseo 610 corta uma cavidade em osso ou prepara e osteotomia que é substancialmente cilíndrica.
[120] Os recursos das várias modalidades de perfurador ósseo descritos no presente documento podem ser combinados entre si em qualquer combinação adequada. Por exemplo, um perfurador ósseo que tem o formato de corte transversal de perfurador ósseo 410 poderia ser usado com diâmetros afunilados de perfuradores ósseos 510, 610 ou 810. Em outro exemplo, uma primeira porção de um perfurador ósseo pode ter o formato de corte transversal do perfurador ósseo 410, e uma segunda porção do mesmo perfurador ósseo pode ter o formato de corte transversal dos perfuradores ósseos 510 ou 610. Em outro exemplo, um perfurador ósseo com três canais tais como perfuradores 510 e 610 pode ter um diâmetro consistente ao longo dos comprimentos de trabalho 512 e 612 inteiros, respectivamente. Em ainda outro exemplo, um perfurador ósseo do formato de 510 da Figura 5 poderia ser usado com diâmetro decrescente do perfurador ósseo 610 da Figura 6. De modo similar, outras tais combinações e subcombinações são antevistas dentro do escopo deste documento.
[121] A Figura 6G ilustra o diferencial entre os tamanhos e formatos dos envelopes de corte do perfurador 510 das Figuras 5A a 5F e o perfurador 610 das Figuras 6A a 6F. O perfurador 510 exibe um envelope de corte afunilado, enquanto o perfurador 610 exibe um envelope de corte paralelo ou cilíndrico. O envelope de corte afunilado do perfurador 510 é retratado pelo perfil 800 (com linhas sólidas), e o envelope de corte paralelo do perfurador 610 é retratado pelo perfil 801 (com linhas pontilhadas).
[122] Agora em referência também às Figuras 6H e 61, a ponta 613 do perfurador 610 é essencialmente piramidal com três lados e diferente da maioria das pontas de cinzel, que têm dois lados. Emanam da ponta afiada 670 três planos de inclinação ou facetas 666A, 666B, e 666C que cooperam para formar o primeiro conjunto de rebordos de corte limitados em comprimentos por bordas 663A, 663B e 663C. Nessa modalidade, e quando visualizado pelo lado, o primeiro plano de inclinação ou faceta se estende lateralmente na direção oposta do eixo central e se aproxima a 60 graus. Desse modo, em uma vista lateral, quaisquer dois planos de inclinação cooperam para formar um ângulo que se aproxima a 120 graus. Esse ângulo pode ser aumentado quando usado para perfurar materiais mais macios e diminuir ao perfurar materiais mais duros. Esse primeiro conjunto de facetas é subtendido por um segundo conjunto de facetas 665A, 665B, e 665C, que têm comprimento menor do que o primeiro conjunto de facetas, e cooperam para formar um segundo conjunto de rebordos limitados em comprimentos por bordas 662A, 662B e 662C. Esse segundo conjunto de facetas e rebordos se estendem na direção oposta do eixo central em um ângulo que é menor do que o ângulo do primeiro conjunto de facetas. O segundo conjunto de facetas é subtendido por um terceiro conjunto de facetas 664A, 664B, e 664C que têm comprimento limitado por bordas 661A, 661B e 661C. O terceiro conjunto de facetas e rebordos se estendem na direção oposta do eixo central em um ângulo que é ainda menor do que o ângulo do primeiro conjunto e do segundo conjunto de facetas.
[123] Configurações de ponta multifacetadas podem aprimorar a capacidade de autocentralização, geometria de furo ou simetria, reduzir a produção de rebarba de saída, aprimoram a quebra de lascas e capacidade de arraste, e reduzir a força axial ou impulso exigido para operar o perfurador. Dependendo das necessidades do operador e a qualidade e dureza da peça de trabalho, os números de facetas e o ângulo dos planos de inclinação de cada faceta pode ser aumentado ou diminuído. Projetos tais como aqueles trabalharão de modo sinérgico com ferramentas de corte de precessão com cortes transversais deslocados para aprimorar também a eficiência de corte.
[124] Nas modalidades das Figuras 3A a 6E, o ponto na extremidade livre ou ponta, por exemplo, o ponto 322 na extremidade da ponta 320, está no eixo de rotação. No entanto, isso não é exigido. Por exemplo, a extremidade apontada da ponta pode ser deslocada do eixo de rotação. As Figuras 7A1 e 7B1 mostram exemplos de pontas deslocadas (extremidades apontadas que são deslocadas do eixo de rotação) de acordo com algumas modalidades. Isso pode ser o caso em que o centro de massa da extremidade de ponta da porção de trabalho coincide com o eixo ou rotação, e/ou em que o centro de massa da extremidade de ponta da porção de trabalho é deslocada do eixo de rotação.
[125] Agora em referência às Figuras 7A1 e 7B1 que mostram exemplos de pontas ativas 710 e 720 de uma broca piloto. Aqueles versados na técnica reconhecerão que, similar a um perfurador ósseo que tem um perfil de deslocamento, a ponta também pode ser deslocada do eixo de rotação do perfurador. A Figura 7B1 mostra uma ponta de cinzel que exibe planos de inclinação 700B e 703B que são relativamente iguais. A Figura 7A1, no entanto, mostra uma ponta de cinzel em que a inclinação 700A é menor e menos aguda do que o plano de inclinação de 703A. Os diagramas também ilustram que as áreas de superfície formadas por facetas 701A e 702A são menores em combinação do que a área de superfície formada pela faceta 703A. Também deve-se reconhecer que um perfurador ósseo que é deslocado da haste até a ponta também exibirá um deslocamento inerente na extensão distal do perfurador e/ou da ponta. Em algumas modalidades, as pontas podem permanecer substancialmente centralizadas quando estão em uso.
[126] As Figuras 7A a 7F ilustram outro perfurador ósseo 710 exemplificador. O perfurador ósseo 710 é uma modalidade de perfurador ósseo de deslocamento giratório de três lados que tem corte transversal geralmente triangular. O perfurador ósseo de deslocamento 710 tem três lados, tem corte transversal geralmente triangular, e pode ser utilizado para remover osso. O instrumento de perfuração óssea deslocado 710 inclui uma haste 711, uma ponta 713 (também denominados no presente documento como uma extremidade livre), e uma porção de trabalho 712 entre as mesmas. Em algumas modalidades, o diâmetro da porção de trabalho 712 é ligeiramente afunilado, ou seja, aumenta em diâmetro da haste 711 até a ponta 713. Alternativamente, o diâmetro da porção de trabalho 712 pode permanecer substancialmente constante ao longo do comprimento da porção de trabalho 712, ou pode ser afunilado de modo que o diâmetro diminui da haste 711 até a ponta 713.
[127] A porção de trabalho 712 do perfurador 710 define três canais 720A, 720B e 720C. Conforme será descrito adicionalmente, o perfurador ósseo 710 corta uma cavidade óssea ou prepara uma osteotomia que é geralmente cilíndrica.
[128] Um encaixe 715, que é adequado para um acoplamento liberável a um motor acionado por mecanismo com uma peça manual e mandril, ou um manípulo utilizado para instrumentação manual, pode ser fixado à haste 711.
[129] A ponta 713 pode incluir uma superfície ativa ou de corte que é confluente com a porção de trabalho 712 (por exemplo, como a ponta mostrada nas Figuras 7A1 e 7B1). Alternativamente, a ponta projetante 713 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 712.
[130] Na modalidade retratada, o MnFD 717 é localizado próximo à extremidade de haste 711 da porção de trabalho 712, e o MxFD 718 é localizado próximo à ponta 713. A haste 711 acima da porção de trabalho 712 é essencialmente cilíndrica e exibe um diâmetro ligeiramente maior do que a superfície de corte no MnFD 717. Em referência in particular às Figuras 7D a 7F, aqueles versados na técnica reconhecerão que o centro de massa 741 de um corte transversal no MnFD 717 (corte transversal A-A na Figura 7D) é deslocado do eixo de rotação 740 do perfurador ósseo 710. Além disso, o centro de massa 741 de um corte transversal no MxFD 718 (corte transversal B-B na Figura 7E) é também deslocado do eixo de rotação 740. Embora os centros de massa dos cortes transversais 717 e 718 (e os centros de massa dos cortes transversais entre os mesmos) sejam deslocados do eixo de rotação, nessa modalidade, a extremidade apontada da ponta 713 coincide com o eixo de rotação. No entanto, em modalidades alternativas, a extremidade apontada da ponta também pode ser deslocada do eixo de rotação.
[131] Conforme mostrado nas Figuras 7A a 7F, o perfurador ósseo 710 define três canais helicoidais contínuos 720A, 720B e 720C que formam espirais ao longo do comprimento da porção de trabalho 712. Os canais 720A, 720B e 720C são sulcos substancialmente côncavos que seguem a circunferência da porção de trabalho 712 como espirais entre a haste 711 e a ponta projetante 713 para definir círculos concêntricos. Em algumas modalidades, os canais 720A, 720B e 720C podem ser equidistantes um do outro. Em algumas modalidades, os canais 720A, 720B e 720C podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 713. O número total de voltas por canal dos canais 720A, 720B e 720C do MnFD 717 ao MxFD 718 pode depender do comprimento total da porção de trabalho 712, mas é tipicamente não menor do que um quarto de uma revolução completa. Os canais helicoidais 720A, 720B e 720C se originam, cada um, no MnFD 717 em locais separados que são espaçados relativamente igualmente afastados ao redor da circunferência da haste 711, ou mais especificamente em cerca de 120 graus de separação.
[132] Também em referência às Figuras 7D e 7E, pode-se observar que as ranhuras em formato de S 721A, 721B e 721C definem bordas de corte nos pontos 731A, 731B e 731C. Em algumas modalidades, essas interseções são distâncias igualmente afastadas, e em cerca de 120° de separação para formar um ângulo de corte neural (ângulo de 90° à tangente do perímetro da haste 711) ou ângulo de inclinação ligeiramente positivo (maior do que 90° à tangente do perímetro da haste 711). Deve-se reconhecer que esse ângulo de corte pode ser tanto negativo como positivo (ou seja, menor ou maior do que 90° à tangente do perímetro da haste 711). Nessa modalidade, linhas traçadas para conectar pontos 731A, 731B, e 731C formam um triângulo equilátero. No entanto, aqueles versados na técnica reconhecerão também que os pontos 731A, 731B e 731C podem ser separados variando-se graus e/ou distâncias que tornam o corte transversal embora triangular, assimétrico (por exemplo, em 110, 125 e 125 graus de separação, ou em outros graus de separação). Também será reconhecido que ranhuras 721A, 731B e 721C podem ser variáveis em profundidade e formato e podem ter qualquer uma dentre uma miríade de diferentes configurações.
[133] Nesse perfurador ósseo 710 exemplificador, as ranhuras 721A, 721B e 721C têm formato de S e são individualmente simétricas. O bissetor de cada ranhura divide a ranhura igualmente em segmentos convexos e um côncavo que formam o perfil em formato de S. As linhas que atravessam cada ranhura 721A, 721B e 721C podem ser traçadas até o centroide 741 do núcleo 726 e têm comprimento igual. Além disso, um bissetor alternativo pode ser traçado do ponto central de bissetor de cada ranhura 721A, 721B e 721C através da maior concavidade até a ranhura adjacente 721A, 721B e 721C. As linhas traçadas perpendiculares às linhas de bissetor alternativo formam um triângulo equilátero. Os bissetores para cada ranhura 721A, 721B e 721C são iguais. Conforme mencionado anteriormente, a maior profundidade de cada ranhura 721A, 721B e 721C podem variar em algumas modalidades. Embora a profundidade e altura de cada ranhura 721A, 721B e 721C possa variar, o diâmetro de corte transversal da porção de núcleo 727 é geralmente não mais estreito do que cerca de 20% do diâmetro da haste 711. No entanto, em algumas modalidades, o diâmetro de corte transversal da porção de núcleo 727 pode ser mais estreito do que cerca de 20% do diâmetro da haste 711.
[134] Conforme declarado acima, o perfurador ósseo 710 é um exemplo de uma modalidade de perfurador ósseo de deslocamento giratório de três lados. Em relação ao recurso de deslocamento, e também em referência às Figuras 7D a 7F, o perfurador 710 tem um eixo de rotação 740 (em torno do qual o perfurador 710 gira quando está em uso), e um eixo de massa 741 que não coincide de modo consistente com o eixo de rotação 740. Em outras palavras, o eixo de massa 741 é deslocado do eixo de rotação 740.
[135] O eixo de massa 741 é a série contínua de pontos definidos pela coleta dos centroides (centros de massa) de cada área de corte transversal ao longo da porção de trabalho 712. Nessa modalidade, o eixo de massa 741 é deslocado do eixo de rotação 740 por uma distância 742. Nessa modalidade, a distância de deslocamento 742 permanece relativamente consistente da haste 711 até a ponta 713, e linear. Esse recurso de deslocamento exclusivo permite que o instrumento 710 corte com um movimento de precessão. Consequentemente, o perfurador ósseo 710 corta uma cavidade em osso ou prepara e osteotomia que é substancialmente cilíndrica.
[136] Em algumas modalidades de instrumento de perfuração, uma parte ou todo o eixo de massa pode ser deslocado do eixo de rotação, e outras relações espaciais podem existir entre os mesmos (diferente da distância relativamente consistente 742 e eixo de massa 741 linear da broca 710). Por exemplo, em algumas modalidades uma parte ou todo o eixo de massa pode se aproximar a uma forma helicoidal que circunda o eixo de rotação. Em outras modalidades, uma parte ou todo o eixo de massa pode formar uma espiral ao redor do eixo de rotação. Em algumas modalidades, o eixo de massa pode cruzar o eixo de rotação ao longo de uma porção do comprimento de trabalho do instrumento, e pode ser deslocado do eixo de rotação ao longo de outras porções do comprimento de trabalho. Em modalidades particulares, o eixo de massa cruza o eixo de rotação em um ou mais pontos, enquanto outros pontos do eixo de massa são deslocados do eixo de rotação. Por exemplo, em algumas modalidades, o eixo de massa pode formar um formato ondulado, sinusoidal, ou curvado que pode cruzar o eixo de rotação em um ou mais pontos.
[137] Projetos com rebordos de corte multifacetados e múltiplas pontas de ponto são também antevistas estão dentro do escopo desta revelação.
[138] As Figuras 8A a 8F ilustram outro perfurador ósseo 810 exemplificador. O perfurador ósseo 810 é um exemplo de uma modalidade de perfurador ósseo de quatro lados de deslocamento giratório. O perfurador ósseo de deslocamento 810 tem quatro lados, é tanto quadrilátero quanto radial no corte transversal, e pode ser utilizado para remover osso. O instrumento de perfuração óssea 810 inclui uma haste 811, uma extremidade livre ou ponta 813, e uma porção de trabalho 812 entre as mesmas. Nessa modalidade, o diâmetro da porção de trabalho 812 é ligeiramente afunilado, ou seja, aumenta em diâmetro da haste 811 até a ponta 813. Em outras modalidades, o cone pode estar na direção reversa, ou o perfurador pode não ter cone. A porção de trabalho 812 do perfurador 810 define quatro canais 820A, 820B, 820C e 820D. Conforme será descrito adicionalmente, essa modalidade do perfurador ósseo 810 corta uma cavidade óssea ou prepara uma osteotomia que é geralmente cilíndrica.
[139] Um encaixe 815 na porção de extremidade proximal do perfurador ósseo 810 é adequado para um acoplamento liberável a um motor acionado por mecanismo com uma peça manual e mandril, ou um manípulo utilizado para instrumentação manual. O encaixe 815 pode se estender da haste 811.
[140] A ponta 813 pode incluir uma superfície ativa ou de corte que é confluente à porção de trabalho 812 (por exemplo, como a ponta mostrada nas Figuras 7A e 7B). Alternativamente, a ponta projetante 813 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 812.
[141] O MnFD 817 é localizado próximo à extremidade de haste 811 da porção de trabalho 812. O MxFD 818 é localizado próximo à ponta 813. A haste 811 acima da porção de trabalho 812 é essencialmente cilíndrica e exibe um diâmetro ligeiramente maior do que a superfície de corte no MnFD 817. Em referência in particular às Figuras 8D a 8F, aqueles versados na técnica reconhecerão que o centro de massa 841 de um corte transversal no MnFD 817 é deslocado do eixo de rotação 840 do perfurador ósseo 810. No entanto, o centro de massa de um corte transversal no MxFD 818 coincide com o eixo de rotação 840.
[142] Conforme mostrado nas Figuras 8A a 8F, o perfurador ósseo 810 define quatro canais helicoidais contínuos 820A, 820B, 820C e 820D. Os canais 820A, 820B, 820C e 820D são sulcos angulares, que seguem a circunferência da porção de trabalho 812 como espirais entre a haste 811 e a ponta projetante 813 para definir círculos concêntricos. Embora os canais 820A, 820B, 820C e 820D na modalidade retratada do perfurador ósseo 810 formem espirais ao redor do eixo de rotação entre a haste 811 e a ponta projetante 813, deve-se entender que os canais 820A, 820B, 820C e 820D podem ser configurados de modo diferente em modalidades alternativas. Por exemplo, em algumas modalidades, os canais 820A, 820B, 820C e 820D são lineares e se estendem geralmente paralelos ao eixo longitudinal do perfurador ósseo 810 (que é coincidente com o eixo de rotação).
[143] Em algumas modalidades, os canais 820A, 820B, 820C e 820D podem ser equidistantes um do outro. Em algumas modalidades, os canais 820A, 820B, 820C e 820D podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 813. O número total de voltas por canal dos canais 820A, 820B, 820C e 820D do MnFD 817 ao MxFD 818 pode depender do comprimento total da porção de trabalho 812, mas é geralmente não menor do que um quarto de uma revolução completa. Em algumas modalidades, os canais helicoidais 820A, 820B, 820C e 820D se originam, cada um, no MnFD 817 em locais separados, e são igualmente separados ao redor da circunferência da haste 811, ou mais especificamente são em 90 graus de separação.
[144] Também em referência às Figuras 8D e 8E, pode-se observar que as ranhuras angulares 821A, 821B, 821C e 821D associadas aos canais 820A, 820B, 820C e 820D cruzam a periferia da haste 811 nos pontos 831A, 831B, 831C e 831D. Nessa modalidade, essas interseções são distâncias igualmente afastadas, e em cerca de 90° de separação. Deve- se entender, no entanto, que essas interseções podem estar em diferentes pontos de origem, tais como em cerca de 80°, 100°, 80° e 100°, para fornecer somente um tal exemplo.
[145] Nessa modalidade, as ranhuras 821A, 821B, 821C e 821D formam um ângulo de corte neural (em cerca de um ângulo de 90° à tangente do perímetro da haste 811). Alternativamente, as ranhuras podem formar um ângulo de inclinação positivo (por exemplo, maior do que 90° à tangente do perímetro da haste 811). É também reconhecido que esse ângulo de corte pode ser negativo (por exemplo, menos do que 90° à tangente do perímetro da haste 811). Nessa modalidade, linhas traçadas para conectar pontos 831A, 831B, 831C e 831D se unem para formar uma configuração quadrilátera. No entanto, aqueles versados na técnica reconhecerão também que pontos 831A, 831B, 831C e 831D podem ser separados variando-se graus e/ou distâncias que tornam o corte transversal embora quadrilateral, assimétrico, por exemplo, em cerca de 80, 85, 95 e 100 graus de separação (ou em outros graus de separação). Também será reconhecido que ranhuras 821A, 831B, 821C e 821D pode ter profundidade e formato variáveis e podem ter uma ampla variedade de configurações.
[146] Nesse perfurador ósseo 810 exemplificador, as ranhuras 821A, 821B, 821C e 821D são angulares (por exemplo, formando quase um ângulo reto) adjacente à trama ou núcleo 826, e as ranhuras 821A, 821B, 821C e 821D são individual e aproximadamente simétricas.
[147] As maiores profundidades das ranhuras 821A, 821B, 821C e 821D são indicadas pela largura do núcleo 826 e podem ser constantes ou variáveis. O diâmetro de corte transversal da porção de núcleo 826 é, geralmente, não mais estreito do que cerca de 20% do diâmetro da haste 811. Mas, em alguns casos, o diâmetro de corte transversal da porção de núcleo 826 pode ser mais estreito do que cerca de 20% do diâmetro da haste 811.
[148] Conforme declarado acima, o perfurador ósseo 810 é um exemplo de uma modalidade de perfurador ósseo de quatro lados de deslocamento giratório. Em relação ao recurso de deslocamento, e também em referência às Figuras 8D a 8F, o perfurador 810 tem uma linha central ou eixo de rotação 840 (em torno do qual o perfurador 810 gira quando está em uso), e um eixo de massa 841 que não coincide com o eixo de rotação 840. O eixo de massa 841 é uma linha definida pelos centros de massa de áreas de corte transversal consecutivos do perfurador ósseo 810. O deslocamento é a diferença entre o eixo de massa 841 e o eixo de rotação 840 (que são deslocados em uma distância 842 um do outro). Nessa modalidade, a distância de deslocamento 842 diminui continuamente da haste 811 até a ponta 813, e é zero no ponto final 846. Esse recurso de deslocamento exclusivo permite que o instrumento 810 corte com um movimento de precessão, que curva um envelope de corte 843 com o uso de um corte transversal com um corte transversal 844 menor. Consequentemente, o perfurador ósseo 810 corta uma cavidade em osso ou prepara e osteotomia que permanece cilíndrica e corresponde ao MxFD 818, com um perfurador que tem corte transversal substancialmente menor longitudinalmente. Em outras modalidades, a distância de deslocamento 842 pode ser diferente, por exemplo, zero na haste 811 e aumentar continuamente até a ponta 813.
[149] Os recursos das várias modalidades de perfurador ósseo descritos no presente documento podem ser combinados entre si em qualquer combinação adequada. Por exemplo, o perfurador ósseo 810 é um exemplo de uma modalidade de perfurador ósseo de quatro lados de deslocamento giratório que aumenta em diâmetro da haste 811 até a ponta 813, e outras modalidades também podem ser adaptadas para incluir tal cone. Por exemplo, um perfurador ósseo que tem o formato de corte transversal de perfurador ósseo 410, 510, 610 ou 710 ou poderia ser usado com diâmetros afunilados do perfurador ósseo 810. Todas as combinações e subcombinações dos recursos e projetos fornecidas no presente documento estão dentro do escopo desta revelação.
[150] As Figuras 9A1 a 9C1, 9A2 a 9C2, 9D1, 9E1 e 9F ilustram outro perfurador ósseo 910 exemplificador. As Figuras 9A1 a 9C1 e 9A2 a 9C2 mostram o mesmo perfurador ósseo 910, mas as vistas giram em 90 graus uma em relação à outra. Ou seja, a Figura 9A2 é uma vista do perfurador ósseo 910 de uma perspectiva que gira em 90 graus a partir da vista da Figura 9A1.
[151] O perfurador ósseo 910 é uma modalidade de um perfurador ósseo de quatro lados de deslocamento giratório. O perfurador ósseo de deslocamento 910 tem um corte transversal que é formado aproximadamente como um paralelogramo. Em modalidades particulares, o formato de corte transversal pode ser próximo a um rombo. O perfurador ósseo 910 pode ser utilizado para remover osso e para perfurar outros materiais conforme descrito no presente documento. O instrumento de perfuração óssea 910 inclui uma haste 911, uma ponta 913 (ou extremidade livre), e uma porção de trabalho 912 entre as mesmas. Nessa modalidade, o diâmetro da porção de trabalho 912 (conforme definido pela trajetória giratória dos pontos 931A e 931C, que são as interseções das ranhuras 921A com 921D, e 921B com 921C) é ligeiramente afunilado, ou seja, aumenta em diâmetro da haste 911 até a ponta 913. Em outras modalidades, o cone pode estar na direção reversa, ou o perfurador pode não ter cone. A porção de trabalho 912 do perfurador 910 define quatro canais 920A, 920B, 920C e 920D. Conforme será descrito adicionalmente, essa modalidade do perfurador ósseo 910 corta uma cavidade óssea ou prepara uma osteotomia que é geralmente cilíndrica. Um encaixe 915 na porção de extremidade proximal do perfurador ósseo 910 é adequado para acoplar de modo liberável o perfurador 910 a um motor acionado por mecanismo com uma peça manual e mandril, ou um manípulo utilizado para instrumentação manual. O encaixe 915 se estende a partir da haste 911.
[152] A ponta 913 pode incluir uma superfície ativa ou de corte que é confluente com a porção de trabalho 912 (como a ponta mostrada nas Figuras 7A1 e 7B1). Alternativamente, a ponta projetante 913 pode incluir uma superfície não ativa ou sem corte que é confluente com a porção de trabalho 912.
[153] Nessa modalidade, o MnFD 917 é localizado próximo à extremidade de haste 911 da porção de trabalho 912, e o MxFD 918 é localizado próximo à ponta 913. Em outras modalidades, os locais do MnFD e MxFD podem ser em qualquer lugar ao longo da porção de trabalho 912. A haste 911 acima da porção de trabalho 912 é essencialmente cilíndrica e exibe um diâmetro ligeiramente maior do que a superfície de corte no MnFD 917. Em referência em particular às Figuras 9D1, 9E1, e 9F, aqueles versados na técnica reconhecerão que o centro de massa 941 de um corte transversal no MnFD 917 (em referência à Figura 9D 1) é deslocado do eixo de rotação 940 do perfurador ósseo 910. No entanto, o centro de massa de um corte transversal no MxFD 918 coincide com o eixo de rotação 940. Em outras modalidades, os centros de massa de cortes transversais em várias posições ao longo da porção de trabalho de um instrumento podem formar um eixo de massa que tem uma relação espacial diferente do eixo de rotação (isto é, diferente da relação espacial entre o eixo de massa e eixo de rotação definidos pelo perfurador 910). Por exemplo, conforme descrito acima, uma parte ou todo o eixo de massa pode ser helicoidal, em formato de espiral, ondulado, curvado, linear, deslocado do eixo de rotação, coincidente com o eixo de rotação, e assim por diante. Em algumas modalidades, combinações de tais recursos podem ser incluídas em um único instrumento.
[154] Conforme mostrado nas Figuras 9A1 a 9C1, 9A2 a 9C2, 9D1, 9E1 e 9F, o perfurador ósseo 910 define quatro canais helicoidais contínuos 920A, 920B, 920C e 920D. Nessa modalidade, as ranhuras 921A, 921B, 921C e 921D são superfícies geralmente planas. Em modalidades alternativas, as ranhuras 921A, 921B, 921C e 921D têm perfis curvados com um ou mais porções côncavas ou convexas, perfis em formato de S, perfis em formato de J e similares. Consistente com os cortes transversais de paralelogramo mostrados nas Figuras 9D1, 9E1, os canais 920A, 920B, 920C e 920D formam um formato retilíneo bissimétrico com canais 920A e 920C que são relativamente iguais e que circunscrevem o menor arco, e canais 920B e 920D que são relativamente iguais e circunscrevem o maior arco. Aqueles versados na técnica reconhecerão que os comprimentos de arco podem variar de modo que formatos de corte transversal assimétricos possam ser definidos em algumas modalidades. Nessa modalidade, esses arcos exibirão novamente bissimetria e circundam o eixo em uma taxa relativamente igual da haste para a ponta. Em outras modalidades, os canais 920A, 920B, 920C e 920D podem se tornar cada vez mais apertados ou mais numerosos à medida que os mesmos se aproximam da ponta 913 (ou mais apertados na extremidade de haste). O número total de voltas por canal dos canais 920A, 920B, 920C e 920D do MnFD 917 (em referência ao corte transversal A-A das Figuras 9A1 e 9D1) ao MxFD 919 (em referência ao corte transversal B—B das Figuras 9A1 e 9E1) pode depender do comprimento total da porção de trabalho 912, mas é geralmente não menor do que um quarto de uma revolução completa.
[155] Também em referência às Figuras 9D1 e 9E1, pode- se observar que as ranhuras 921A, 921B, 921C e 921D associadas aos canais 920A, 920B, 920C e 920D se cruzam nos pontos 931A, 931B, 931C e 931D. Nessa modalidade, as interseções 931A, 931B, 931C e 931D definem segmentos arqueados entre os mesmos em ângulos de cerca de 70 graus, 110 graus, 70 graus e 110 graus. Deve-se entender, no entanto, que outros ângulos podem ser usados em outras modalidades, de modo que o formato do corte transversal possa se tornar mais estreito, maior, assimétrico, triangular, e assim por diante. Além disso, o formato dos cortes transversais pode variar ao longo do comprimento de trabalho do instrumento. Por exemplo, o formato de um corte transversal próximo à haste pode ser romboidal e o formato de um corte transversal em qualquer lugar pode ser um paralelogramo conforme retratado na Figura 9E1 (ou outro tipo de formato).
[156] Nessa modalidade, as ranhuras 921A, 921B, 921C e 921D formam ângulos de corte negativos tangentes com o perímetro de haste 911. Alternativamente, as ranhuras podem formar um ângulo de inclinação neutro ou positivo tangente com o perímetro da haste 911.
[157] Também será reconhecido que ranhuras 921A, 931B, 921C e 921D podem incluir porções côncavas que podem ser formadas para ter várias profundidades, formatos e podem ter uma ampla variedade de configurações. As maiores profundidades das ranhuras 921A, 921B, 921C e 921D são afetadas pela largura do núcleo 943, e as profundidades podem ser constantes ou variáveis ao longo da porção de trabalho 912. O diâmetro de corte transversal da porção de núcleo 943 é geralmente não mais estreito do que cerca de 20% do diâmetro da haste 911. No entanto, em algumas modalidades, o diâmetro de corte transversal da porção de núcleo 943 pode ser mais estreito do que cerca de 20% do diâmetro da haste 911.
[158] Conforme declarado acima, o perfurador ósseo 910 é um exemplo de um perfurador ósseo de quatro lados de deslocamento giratório que tem o corte transversal de um paralelogramo. Em relação ao recurso de deslocamento, e também em referência às Figuras 9D1, 9E1, e 9F, o perfurador 910 tem uma linha central ou eixo de rotação 940 (em torno do qual o perfurador 910 gira quando está em uso), e um eixo de massa 941 que não coincide de modo consistente com o eixo de rotação 940. O eixo de massa 941 é uma série contínua de pontos definidos pelos centros de massa (centroides) de áreas de corte transversal consecutivas do perfurador ósseo 910 ao longo da porção de trabalho 912. O deslocamento é a diferença espacial entre o eixo de massa 941 e o eixo de rotação 940 (que são deslocados em uma distância 942 um do outro próximo à haste 911). Nessa modalidade, a distância de deslocamento 942 diminui da haste 911 até a ponta 913, e é cerca de zero no ponto final 946. Esse recurso de deslocamento exclusivo permite que o instrumento 910 corte com um movimento de precessão, que pode remover material em um envelope pelo menos tão largo quanto o envelope de corte 943, enquanto usa um instrumento com um corte transversal 944 menor. Consequentemente, o perfurador ósseo 910 corta uma cavidade em osso (ou outro material), e pode preparar uma osteotomia que permanece geralmente cilíndrica e corresponde ao MxFD 918, com um perfurador 910 que tem corte transversal substancialmente menor. Em outras modalidades, a distância de deslocamento 942 pode ser diferente, por exemplo, cerca de zero na haste 911 e aumentar até a ponta 913, ou o deslocamento pode ser essencial consistente da haste para a ponta conforme mostrado, por exemplo, na modalidade da Figura 7A a 7F.
[159] Em algumas modalidades de instrumento de perfuração que tem cortes transversais formados como um paralelogramo, outras relações espaciais podem existir entre o eixo de massa e o eixo de rotação (ou seja, diferente da distância 942 próxima à haste 911 e que diminui até cerca de zero na ponta 913). Por exemplo, em algumas modalidades, o eixo de massa pode se aproximar a uma forma helicoidal que circunda o eixo de rotação. Em outras modalidades, o eixo de massa pode formar uma espiral ao redor do eixo de rotação. Em algumas modalidades, o eixo de massa pode cruzar o eixo de rotação ao longo de uma porção do comprimento de trabalho do instrumento, e pode ser deslocado do eixo de rotação ao longo de outras porções do comprimento de trabalho. Em modalidades particulares, o eixo de massa cruza o eixo de rotação em um ou mais pontos, enquanto outros pontos do eixo de massa são deslocados do eixo de rotação. Por exemplo, em algumas modalidades, o eixo de massa pode formar um formato ondulado ou curvado que pode cruzar o eixo de rotação em um ou mais pontos.
[160] Em referência às Figuras 10A a 10I, um aparelho 1014 exemplificador para extração óssea (também denominado no presente documento como uma cesta de ossos) é fornecido, em conjunto com um perfurador ósseo 1010. O aparelho de extração óssea 1014 pode ser encaixado de modo intercambiável sobre a superfície de trabalho de perfuradores ósseos, incluindo, porém, sem limitação, o perfurador ósseo 1010 exemplificador e outros perfuradores ósseos descritos no presente documento, e conectados e/ou em contiguidade com a haste do próprio perfurador. O aparelho de extração óssea 1014 é um utensílio telescópico. Ou seja, o aparelho 1014 pode incluir múltiplas porções que pode cooperar para formar configurações que são axialmente extensíveis (por exemplo, Figura 10B), axialmente retráteis (por exemplo, Figura 10H), e em qualquer lugar entre as configurações estendida e retraída. Esse aparelho de extração óssea exemplificador 1014 tem duas porções que podem ser comparadas ou descritas, por exemplo, como compartimentos ou recipientes.
[161] O aparelho de extração óssea 1014 inclui um recipiente 1021 localizado de modo proximal e um recipiente 1031 localizado de modo distal. Nessa modalidade, o recipiente distal 1031 é deslizável de modo que o recipiente distal 1031 possa ser posicionado substancialmente dentro da região interior definida pelo recipiente proximal 1021, tal como quando o aparelho 1014 está na configuração axialmente retraída. Os recipientes 1021 e 1031 podem ser interconectados e estabilizados um com o outro de várias maneiras. Por exemplo, os recipientes 1021 e 1031 podem incluir projeções anulares complementares 1023 e 1032, respectivamente. Nessa modalidade, o recipiente proximal 1021 inclui uma projeção anular 1023 que se estende radialmente para dentro em direção ao eixo do recipiente 1021. O recipiente distal 1031 inclui uma projeção anular 1032 que se estende radialmente para fora na direção oposta do eixo do recipiente 1031. As projeções 1023 e 1032 são dimensionadas de modo que o recipiente distal 1031 seja deslizável dentro do recipiente proximal 1021, mas em que tal deslizamento é limitado na direção distal por uma interferência entre as projeções 1023 e 1032. Ou seja, a extensão à qual os recipientes 1021 e 1031 podem se estender axialmente é limitada pelo contato físico e a interferência entre as projeções 1023 e 1032, conforme mostrado na Figura 10A.
[162] Ainda em referência às Figuras 10A a 10I, conforme descrito anteriormente, o perfurador ósseo 1010 pode ser acoplado ao mandril de uma ferramenta motora giratória ou uma peça de mão por meio da extremidade de haste 1011 do perfurador ósseo 1010. A extremidade de trabalho do perfurador ósseo 1010 pode se estender através do aparelho de extração óssea 1014, e passam através da extremidade distal do recipiente distal 1031 do aparelho 1014 para revelar pelo menos a ponta do perfurador 1010.
[163] Em algumas modalidades, um perfurador ósseo e aparelho de cesta de extração óssea são acoplados entre si por meio de um mancal ou bucha nos quais o perfurador é livre para girar em relação à cesta de ossos. Nesse exemplo, um mancal 1024/1025/1026 é localizado no colar proximal 1013 da cesta proximal 1021 (em referência às Figuras 10A, 10E a 10G, e 10I). A extremidade proximal do colar 1013 pode ser posicionada para estar quase em contiguidade com o cubo de batente de perfurador 1015 do perfurador 1011. A calha externa 1026 do mancal 1024/1025/1026 é acoplada de modo eficaz ao diâmetro interno do recipiente proximal 1021 de modo que a calha externa 1026 e recipiente proximal 1021 giram entre si. Em algumas modalidades, a calha externa 1026 é acoplada ao recipiente proximal 1021 com o uso de um encaixe por pressão de interferência entre os mesmos. Em algumas modalidades, outras técnicas de acoplamento são usadas, tais como grampeamento, rosqueamento, com o uso de adesivo e similares. Em modalidades particulares, esse acoplamento pode ser seletivamente desmontado e remontado por um usuário do perfurador ósseo 1010 que tem o aparelho de extração óssea 1014. Em modalidades alternativas, a calha externa 1026 e o recipiente proximal 1021 pode ser uma peça unitária de material que é feita por meio de usinagem, soldagem, formação e similares.
[164] A calha interna 1024 do mancal 1024/1025/1026 é acoplada de modo eficaz ao perfurador 1010 de modo que a calha interna 1024 e o perfurador 1010 giram entre si. Na modalidade mostrada, o perfurador 1010 inclui um sulco anular 1016 localizado próximo ao lado distal do batente de perfurador 1015 no qual o mancal 1024/1025/1026 é assentado, embora tal sulco não seja exigido. Por exemplo, em algumas modalidades um anel de pressão pode ser usado para reter a calha interna 1024 à haste do perfurador 1010 entre o anel de pressão e o batente de perfurador 1015.
[165] O diâmetro externo do recipiente proximal 1021 pode ser dimensionado para se encaixar prontamente através de uma guia de perfuração, que atua para direcionar o eixo longitudinal do perfurador ósseo 1010.
[166] Ainda em referência às Figuras 10A a 10I, nessa modalidade, é evidente que a cesta de ossos 1021/1031 é telescópica e de extremidade aberta. À medida que a perfuração continua de modo distal, o recipiente distal 1031 entra em contato com o osso ou outro material de tecido de modo que o recipiente distal 1031 seja tocado para deslizar axialmente no recipiente proximal 1021 para formar, por fim, a configuração retraída conforme mostrado nas Figuras 10G a 10I.
[167] Deve-se entender que as luvas ou recipientes 1021 e 1031 podem ser perfurados por meio de aberturas 1025 e 1035, que são alinhadas para permitir a solução de irrigação flua continuamente através da cesta 1014 enquanto o perfurador ósseo 1010 gira. As perfurações 1025 e 1035 são preferencialmente menores do que o tamanho das lascas ósseas criadas pelos canais do perfurador ósseo 1010. Deve- se entender também que as fileiras de perfurações 1025 e 1035 são instaladas em distâncias específicas da ponta do perfurador ósseo 1010 de modo que as perfurações 1025 e 1035 podem atuar como um medidor de profundidade intraóssea durante a perfuração.
[168] Visto que o perfurador 1010 gira em relação aos recipientes 1021 e 1031, as partículas de osso removidas pelo fluxo de perfuração em uma direção proximal e para cima e se acumulam nos espaços entre os recipientes 1021 e 1031, tais como o recurso de deslocamento do perfurador ósseo 1010 e os canais que são encerrados pela cesta de extração óssea 1014.
[169] A cesta 1014 pode ser removível e usada tanto como um componente adjunto a um procedimento de osteotomia que permite uma vista operacional clara e limpa ou, em casos em que a extração óssea é desejável. Uma vez que a cesta 1014 é removida do perfurador 1010, os fragmentos ósseos devem ser acessíveis por dentro da própria cesta 1014 ou recuperáveis dos canais do perfurador 1010.
[170] Em referência às Figuras 12A a 12G, outro aparelho exemplificador para extração óssea 1250 é fornecido, em conjunto com um perfurador ósseo 1210 exemplificador. O aparelho de extração óssea 1250 pode ser encaixado de modo intercambiável na superfície de trabalho de perfuradores ósseos, tal como o perfurador ósseo 1210 exemplificador, e conectado e/ou estar em contiguidade com a haste do próprio perfurador. O aparelho de extração óssea 1250 é um utensílio telescópico. Ou seja, o aparelho 1250 pode incluir múltiplas porções que podem cooperar para formar configurações que são axialmente estendidas (por exemplo, Figura 12B), axialmente retraídas (por exemplo, Figura 12G), e em qualquer lugar entre as configurações estendida e retraída. Esse aparelho de extração óssea exemplificador 1250 tem três recipientes: (i) um recipiente proximal 1221, (ii) um recipiente intermediário 1231, e (iii) um recipiente distal 1241.
[171] Nessa modalidade, o recipiente distal 1241 tem o maior diâmetro, o recipiente proximal 1221 tem o menor diâmetro, e o recipiente intermediário 1231 tem um diâmetro que está entre os diâmetros dos recipientes distal e proximal 1241 e 1221. As relações diametrais entre os três recipientes 1221, 1231, e 1241 permitem que o aparelho 1250 se estendam axialmente e retraiam como um telescópio. Ou seja, o recipiente distal 1241 é deslizável sobre o recipiente intermediário 1231 de modo que o recipiente intermediário 1231 possa ser posicionado substancialmente dentro da região interior definida pelo recipiente distal 1241. De modo semelhante, o recipiente intermediário 1231 é deslizável sobre o recipiente proximal 1221 de modo que o recipiente proximal 1221 possa ser posicionado substancialmente dentro da região interior definida pelo recipiente intermediário 1231 (e também substancialmente dentro da região definida pelo recipiente distal 1241 [quando o recipiente intermediário 1231 é posicionado substancialmente dentro da região interior definida pelo recipiente distal 1241]). Quando os recipientes 1221, 1231, e 1241 são então posicionados um dentro do outro, o aparelho 1250 está na configuração axialmente retraída (por exemplo, Figura 12G). Em contraste, quando os recipientes 1221, 1231, e 1241 não são então posicionados um dentro do outro, o aparelho 1250 está na configuração axialmente estendida (por exemplo, Figura 12B) ou configuração parcialmente estendida.
[172] Os recipientes 1221, 1231 e 1241 podem ser interconectados e estabilizados um pelo outro de várias maneiras. Por exemplo, os recipientes 1221, 1231 e 1241 podem incluir projeções anulares complementares 1223, 1232, 1233 e 1242 (com recipiente intermediário 1231 que tem duas projeções anulares — uma projeção anular proximal 1223 que se estende radialmente para dentro e uma projeção anular distal 1233 que se estende radialmente para fora). As projeções 1223, 1232, 1233 e 1242 são dimensionadas de modo que os recipientes 1221, 1231 e 1241 sejam deslizáveis um em relação ao outro, mas em que tal deslizamento é limitado na direção distal por uma interferência entre as projeções 1223 e 1232, e entre as projeções 1233 e 1242. Ou seja, o grau em que os recipientes 1221, 1231 e 1241 podem se estender axialmente é limitado pelo contato físico e interferência entre as projeções 1223, 1232, 1233 e 1242, conforme mostrado na Figura 12A.
[173] Deve-se entender que as luvas ou recipientes 1231 e 1241 podem ser perfuradas por meio de aberturas 1235 e 1245, que são alinhadas para permitir que a solução de irrigação flua continuamente através da cesta aparelho 1250 enquanto o perfurador ósseo 1210 gira. As perfurações 1235 e 1245 são preferencialmente menores do que o tamanho das lascas ósseas criadas pelos canais do perfurador ósseo 1210. Deve-se entender também que as fileiras de perfurações 1235 e 1245 podem ser instaladas em distâncias específicas da ponta do perfurador ósseo 1210 de modo que as perfurações 1235 e 1245 possam atuar como um medidor de profundidade intraóssea durante a perfuração. Nessa modalidade, o recipiente proximal 1221 não tem tais perfurações. Essa disposição ilustra que tais perfurações são opcionais para os recipientes dos aparelhos de extração óssea fornecidos no presente documento. O recipiente proximal 1221, que não é perfurado, pode ser vantajoso para encerrar e reter os fragmentos ósseos capturados nos recipientes 1231 e 1241.
[174] Em algumas modalidades, o perfurador 1210 gira em relação a todos os três recipientes 1221, 1231 e 1241. Em algumas tais modalidades, um mancal ou bucha pode ser usado entre a extremidade proximal do recipiente proximal 1221 e o perfurador 1250 (conforme descrito acima em referência às Figuras 10A, 10E a 10G, e 10I). Em outras modalidades, o recipiente proximal 1221 gira com o perfurador 1250 enquanto o recipiente intermediário 1231 e o recipiente distal 1241 não giram com o perfurador 1250. Em tais casos, um mancal ou bucha pode ser usado entre a extremidade distal do recipiente proximal 1221 e a extremidade proximal do recipiente intermediário 1231.
[175] Visto que o perfurador 1210 gira em relação pelo menos aos recipientes 1231 e 1241, as partículas de osso removidas pelo perfurador 1250 fluirão em uma direção proximal e para cima e acumuladas nos canais e/ou no espaço definido pelo recurso de deslocamento do perfurador ósseo 1210 e encerradas pela cesta 1250.
[176] A cesta 1250 pode ser removível e usada tanto como um adjunto a um procedimento de osteotomia que permite uma vista operacional clara e limpa como, naqueles casos, quando a extração óssea é desejável. Uma vez que a cesta 1250 é removida, os fragmentos ósseos são acessíveis dentro da própria cesta 1250, ou recuperáveis dos canais do perfurador deslocado 1210.
[177] Agora em referência às Figuras 13A a 13G, outro aparelho exemplificador para extração óssea 1350 é fornecido, em conjunto com um perfurador ósseo 1310 exemplificador. O aparelho de extração óssea 1350 pode ser encaixado de modo intercambiável na superfície de trabalho de perfuradores ósseos, tal como o perfurador ósseo 1310 exemplificador, e conectado e/ou estar em contiguidade com a haste do próprio perfurador. O aparelho de extração óssea 1350 é um utensílio telescópico. Ou seja, o aparelho 1350 pode incluir múltiplas porções que podem cooperar para formar configurações que são axialmente estendidas (por exemplo, Figura 13B), axialmente retraídas (por exemplo, Figura 13G), e em qualquer lugar entre as configurações estendida e retraída. Assim como a modalidade 1250 das Figuras 12A a 12G descritas acima, esse aparelho de extração óssea exemplificador 1350 tem três recipientes: (i) um recipiente proximal 1321, (ii) um recipiente intermediário 1331 e (iii) um recipiente distal 1341.
[178] Em contraste à modalidade 1250 das Figuras 12A a 12G, nesse aparelho de extração óssea 1350 o recipiente proximal 1321 tem o maior diâmetro, o recipiente distal 1341 tem o menor diâmetro, e o recipiente intermediário 1331 tem um diâmetro que está entre os diâmetros dos recipientes distal e proximal 1341 e 1321. As relações diametrais entre os três recipientes 1321, 1331, e 1341 permitem que o aparelho 1350 se estendam axialmente e retraiam como um telescópio. Ou seja, o recipiente proximal 1321 é deslizável sobre o recipiente intermediário 1331 de modo que o recipiente intermediário 1331 possa ser posicionado substancialmente dentro da região interior definida pelo recipiente proximal 1321. De modo semelhante, o recipiente intermediário 1331 é deslizável sobre o recipiente distal 1341 de modo que o recipiente distal 1341 possa ser posicionado substancialmente dentro da região interior definida pelo recipiente intermediário 1331 (e também substancialmente dentro da região definida pelo recipiente proximal 1321 [quando o recipiente intermediário 1331 é posicionado substancialmente dentro da região interior definida pelo recipiente proximal 1321]). Quando os recipientes 1321, 1331 e 1341 são então posicionados um dentro do outro, o aparelho 1350 está na configuração axialmente retraída (por exemplo, Figura 13G). Em contraste, quando os recipientes 1321, 1331 e 1341 não são então posicionados um dentro do outro, o aparelho 1350 está na configuração axialmente estendida (por exemplo, Figura 12B) ou configuração parcialmente estendida.
[179] Os recipientes 1321, 1331 e 1341 podem ser interconectados e estabilizados um pelo outro de várias maneiras. Por exemplo, os recipientes 1321, 1331 e 1341 podem incluir projeções anulares complementares 1323, 1332, 1333 e 1342 (com recipiente intermediário 1331 que tem duas projeções anulares — uma projeção anular proximal 1323 que se estende radialmente para fora e uma projeção anular distal 1333 que se estende radialmente para dentro). As projeções 1323, 1332, 1333 e 1342 são dimensionadas de modo que os recipientes 1321, 1331 e 1341 sejam deslizáveis um em relação ao outro, mas em que tal deslizamento é limitado na direção distal por uma interferência entre as projeções 1323 e 1332, e entre as projeções 1333 e 1342. Ou seja, o grau em que os recipientes 1321, 1331 e 1341 podem se estender axialmente é limitado pelo contato físico e interferência entre as projeções 1323, 1332, 1333 e 1342 conforme mostrado na Figura 13A.
[180] Deve-se entender que as luvas ou recipientes 1331 e 1341 podem ser perfuradas por meio de aberturas 1335 e 1345, que são alinhadas para permitir que a solução de irrigação flua continuamente através da cesta aparelho 1350 enquanto o perfurador ósseo 1310 gira. As perfurações 1335 e 1345 são preferencialmente menores do que o tamanho das lascas ósseas criadas pelos canais do perfurador ósseo 1310. Deve-se entender também que as fileiras de perfurações 1335 e 1345 podem ser instaladas em distâncias específicas da ponta do perfurador ósseo 1310 de modo que as perfurações 1335 e 1345 possam atuar como um medidor de profundidade intraóssea durante a perfuração. Nessa modalidade, o recipiente proximal 1321 não tem tais perfurações. Essa disposição ilustra que tais perfurações são opcionais para os recipientes dos aparelhos de extração óssea fornecidos no presente documento. O recipiente proximal 1321, que não é perfurado, pode ser vantajoso para encerrar recipientes 1331 e 1341 e para reter os fragmentos ósseos capturados no mesmo.
[181] Em algumas modalidades, o perfurador 1310 gira em relação a todos os três recipientes 1321, 1331 e 1341. Em algumas tais modalidades, um mancal ou bucha pode ser usado entre a extremidade proximal do recipiente proximal 1321 e o perfurador 1350 (conforme descrito acima em referência às Figuras 10A, 10E a 10G, e 10I). Em outras modalidades, o recipiente proximal 1321 gira com o perfurador 1350 enquanto o recipiente intermediário 1331 e o recipiente distal 1341 não giram com o perfurador 1350. Em tais casos, um mancal ou bucha pode ser usado entre a extremidade distal do recipiente proximal 1321 e a extremidade proximal do recipiente intermediário 1331.
[182] Visto que o perfurador 1310 gira em relação pelo menos aos recipientes 1331 e 1341, as partículas de osso removidas pelo perfurador 1350 fluirão em uma direção proximal e para cima e acumuladas nos canais e/ou no espaço definido pelo recurso de deslocamento do perfurador ósseo 1310 e encerradas pela cesta 1350.
[183] A cesta 1350 pode ser removível e usada tanto como um adjunto a um procedimento de osteotomia que permite uma vista operacional clara e limpa como, naqueles casos, quando a extração óssea é desejável. Uma vez que a cesta 1350 é removida, os fragmentos ósseos são acessíveis dentro da própria cesta 1350, ou recuperáveis dos canais do perfurador deslocado 1310.
[184] As Figuras 14A e 14B mostram porções distais exemplificadoras de perfuradores ósseos 1400 e 1410, de acordo com algumas modalidades, que retêm os canais ao longo de uma parte ou todo o comprimento inteiro da porção de trabalho para manter a ação de arraste, enquanto têm a borda projetante da porção de trabalho modificada de modo que a extremidade distal da porção de trabalho não corte substancialmente o osso. Essa modificação é ocasionada por embotamento ou laminação das bordas de canais tanto na ponta como em uma porção da haste ou ambas, deixando a porção central da porção de trabalho ativa. As bordas de laminação evitarão que o instrumento se alargue demasiadamente ou rompa a extensão distal da osteotomia de modo distal e mitigarão o arrasto e fadiga prematura de modo proximal. A Figura 14A mostra uma porção de ponta sem corte 1406 do instrumento 1400. A Figura 14B mostra uma porção de extremidade de haste sem corte 1418 do instrumento 1410.
[185] A Figura 15 mostra outro perfurador ósseo 1500 exemplificador de acordo com algumas modalidades. O perfurador ósseo 1500 exemplificador é um perfurador ósseo afunilado de quatro lados com hélices que incluem um ou mais cortes cruzados. Os cortes cruzados podem estar (porém, sem exigência a tal) em ângulos retos em relação à hélice. Em geral, os cortes cruzados podem ter uma geometria e profundidade a fim de aumentar a flexibilidade do instrumento endodôntico 1500 para permitir assim que o instrumento 1500 se dobre mais facilmente. Os cortes cruzados podem ter várias geometrias de perfil diferentes, tais como canais em V simétricos, canais em V assimétricos, canais com aresta curva, canais retangulares, canais trapezoidais e similares. Os cortes cruzados podem incluir bordas de corte que, consequentemente, fornecem um dispositivo 1500 de corte mais eficiente.
[186] As Figuras 16A a 16C fornecem uma série de ilustrações que retratam um procedimento pelo qual os perfuradores ósseos fornecidos no presente documento podem ser usados. A Figura 16A retrata um osso longo fraturado, tal como um fêmur. A Figura 16B retrata um perfurador intramedular deslocado (tais como as modalidades de perfurador ósseo fornecidas no presente documento) que prepara o espaço intramedular no osso em preparação para a inserção de um pino intramedular. A Figura 16C retrata a colocação de um pino intramedular e a fixação do osso longo em preparação para cicatrização. Deve-se verificar que as Figuras 16A a 16C fornecem somente um exemplo de um uso para os perfuradores ósseos fornecidos no presente documento, enquanto inúmeros outros usos são também antevistos.
[187] As Figuras 25A a 25H diz respeito a materiais exemplificadores e métodos para produzir os instrumentos de perfuração óssea fornecidos no presente documento. Em algumas modalidades, os instrumentos de perfuração óssea podem ser formados começando com um molde, tais como um molde de metal, que é então modelado (por exemplo, por retificação, etc.) e de outro modo tratado para alcançar um instrumento de perfuração que tem uma configuração desejada. Em algumas modalidades, a porção de corte formada pode ser colocada, revestida, ou de outro modo tratada com carbono similar a diamante, diamante amorfo, nitreto de titânio, ou similares para intensificar as características de desempenho dos instrumentos de perfuração. Em outras modalidades, nenhum revestimento é adicionado. Os instrumentos podem ser feitos de uma variedade de materiais, incluindo vários tipos de aços inoxidáveis, materiais superelásticos (por exemplo, nitinol), cerâmicas e similares. Em algumas modalidades, os instrumentos de perfuração fornecidos no presente documento têm uma ou mais passagens de irrigação longitudinal que atravessam uma porção de colar do perfurador e atravessam um núcleo ou trama do perfurador que sai de modo lateral e distal, em que a passagem é configurada para permitir o fluxo de fluido de irrigação para um perímetro lateral e a ponta do perfurador. Os instrumentos de perfuração fornecidos no presente documento podem incluir adicionalmente um ou mais marcadores de profundidade ou medidores de profundidade no corpo de perfuração. As Figuras 25A a 25D são exemplos de moldes de materiais que podem ser retificados para criar os perfuradores ósseos, e as Figuras 25E a 25H são os perfis de corte transversal dos moldes das Figuras 25A a 25D, respectivamente.
[188] Em referência às Figuras 25A e 25E, um molde exemplificador 2510 tem uma geometria de corte transversal substancialmente uniforme de uma extremidade de haste 2514 a uma extremidade de ponta 2518. A geometria de corte transversal do molde 2510 é assimétrica em relação ao eixo de rotação 2516 abaixo do comprimento do molde 2510. Portanto, os centros de massa dos cortes transversais não estão situados no eixo de rotação 2516 ao longo do comprimento do molde 2510. À medida que os canais são formados, tais como por moagem, usinagem, corte, retificação ou cozimento e compressão, as distâncias relativas entre os canais podem ser mudadas ou as profundidades podem ser mudadas para alcançar instrumentos de perfuração óssea que têm um corte transversal assimétrico ao longo de seu comprimento inteiro, e pode cortar ao longo de um eixo de precessão conforme anteriormente descrito em referência ao modalidades de perfurador ósseo fornecidas no presente documento.
[189] Em referência às Figuras 25B e 25F, um molde 2520 é modelado para ter uma geometria diferente na extremidade de haste 2524 da extremidade de ponta 2528. Nesse exemplo, na extremidade de haste 2524, o molde 2520 tem um corte transversal retangular ou quadrado. Na extremidade de ponta 2528, o molde 2520 assume um corte transversal triangular. Entre o corte transversal triangular e o corte transversal retangular, o molde assume um corte transversal trapezoidal, que pode ter um centroide ou centro de massa que é localizado deslocado do eixo de rotação. À medida que os canais são formados, tais como por moagem, usinagem, corte, retificação ou cozimento e compressão, as distâncias relativas entre os canais podem ser mudadas ou as profundidades podem ser mudadas para alcançar o instrumento que tem um corte transversal simétrico, bissimétrico ou assimétrico ao longo de seu comprimento inteiro. Em algumas modalidades, instrumentos de perfuração formados em tais modos podem cortar ao longo de um eixo de precessão conforme anteriormente descrito em referência às modalidades de perfurador ósseo fornecidas no presente documento.
[190] Em referência às Figuras 25C e 25G, um molde 2530 tem um formato inclinado. Na extremidade de haste 2534, o molde 2530 tem um centro de massa (centroide) que está em um primeiro eixo 2540. Voltado à extremidade de ponta 2538, o molde 2530 tem um centro de massa (centroide) que está em um segundo eixo 2542. O primeiro eixo 2540 é paralelo ao segundo eixo 2542, mas os dois eixos geométricos 2540 e 2542 não sobrepõem ou coincidem um com o outro. Se o perfurador instrumento for cortado essencialmente perpendicular a qualquer um dos eixos geométricos 2540 e 2542, o corte transversal do instrumento pode ser simétrico. Em algumas implantações, o molde é formado com um metal flexível, tais como um metal com memória de formato (por exemplo, nitinol), e o formato é alcançado usinando-se o molde 2530, em vez de dobrar o molde. À medida que os canais são formados, tais como por moagem, usinagem, corte, retificação ou cozimento e compressão, as distâncias relativas entre os canais podem ser mudadas ou as profundidades podem ser mudadas para alcançar o instrumento que tem um corte transversal simétrico, bissimétrico ou assimétrico ao longo de seu comprimento inteiro de modo que o instrumento possa cortar ao longo de um eixo de precessão conforme anteriormente descrito em referência ao modalidades de perfurador ósseo descritas acima.
[191] Em referência às Figuras 25D e 25H, um molde 2550 é cortado (em pelo menos em um plano) em um formato curvado para formar um molde de instrumento que tem um perfil curvado. Alternativamente, um canal seletivo (ou canais) pode incluir um perfil curvado de modo que o instrumento tenha um perfil espiral, similar à bobina ou helicoidal. À medida que os canais são formados, tais como por moagem, usinagem, corte, retificação ou cozimento e compressão, as distâncias relativas entre os canais podem ser mudadas ou as profundidades podem ser mudadas para alcançar o instrumento que tem um corte transversal simétrico, bissimétrico ou assimétrico ao longo de seu comprimento inteiro, e tal instrumento pode cortar ao longo de um eixo de precessão conforme anteriormente descrito em referência ao modalidades de perfurador ósseo fornecido no presente documento.
[192] Várias modalidades e implantações da invenção foram descritas. Todavia, será entendido que várias modificações podem ser feitas sem se afastar do espírito e escopo da invenção. Por exemplo, em outras implantações, instrumentos similares podem ter três, quatro, cinco ou seis canais. Além disso, o padrão de canal pode exibir uma trama ou núcleo amplo ou estreito, e pode ser de uma variedade de formatos de corte transversal, tais como triangular, retilíneo, trapezoidal, um paralelogramo, romboidal ou radial e exibir ângulos de inclinação negativos, neutros ou positivos. As hastes e/ou moldes de metal dos quais esses instrumentos podem ser fabricados e têm diâmetros ligeiramente maiores que fornecem material suficiente para facilitar o número aumentado de canais. Os canais, portanto, exigiriam menos espirais por comprimento de unidade. Os instrumentos de tamanho ou diâmetro crescente, tornam-se cada vez mais menos flexíveis. A implantação de mais canais e/ou corte dos canais mais profundo nos moldes de metal durante a fabricação pode facilitar a compensação para a diminuição de flexibilidade. Além disso, espaços maiores e profundos também fornecem uma oportunidade maior para arrastar detritos do osso.
[193] A porção de trabalho pode incluir várias variações que incluem cortes cruzados, bordas laminadas e uma hélice reversa. A haste pode ser alongada com a porção de trabalho que se estende ao longo somente da extensão distal do dispositivo para acesso aos ossos longos. A haste longa sem canais de corte pode ser usada para preparar o espaço intramedular para colocação de pino intramedular.
[194] Os materiais usados para fabricar esse projeto podem ser tomados a partir de uma variedade de recursos, que incluem materiais superelásticos tais como ligas de níquel e titânio, ou aço inoxidável de várias ligas, e outros materiais metálicos que podem ser retificados ou usinados ou são moldáveis. Materiais radiolucentes tais como cerâmicas são também antevistos para produzir perfuradores ósseos estão dentro do escopo desta revelação.
[195] Embora os perfuradores e escareadores descritos neste documento tenham sido designados para cortar materiais ósseos, deve-se entender que esses projetos podem ter uma variedade de outras aplicações. Por exemplo, os instrumentos fornecidos no presente documento podem ser usados em aplicações industriais nos quais uma variedade de materiais são perfurados. Tais materiais podem incluir, porém, sem limitação, metais, cerâmicas, madeira, placa de reboco, plásticos, pedra, compósitos, sintéticos, silício e similares.
[196] Por fim, deve-se reconhecer que as áreas de corte transversal mais profunda próxima à extremidade proximal de um dispositivo de perfuração deslocado descrito no presente documento oferecem uma excelente oportunidade para sequestrar e extrair osso. Implantações para capturar esse osso são também contempladas. Em algumas modalidades, as lascas ósseas são coletadas em um aparelho removível fixado à porção distal do perfurador, e as lascas ósseas coletadas podem ser usadas para formação de enxerto ósseo.
[197] Embora este relatório descritivo contenha muitos detalhes de implantação específicos, os mesmos não devem ser interpretados como limitações no escopo de qualquer invenção ou do que pode ser reivindicado, mas, preferencialmente, como descrições de recursos que podem ser específicos às modalidades particulares de invenções particulares. Determinados recursos que são descritos neste relatório descritivo no contexto de modalidades separadas também podem ser implantados em combinação em uma única modalidade. Inversamente, vários recursos que são descritos no contexto de uma única modalidade podem também ser implantados em múltiplas modalidades separadamente ou em qualquer subcombinação adequada. Além disso, embora os recursos possam ser descritos acima como agir em certas combinações e mesmo inicialmente reivindicado como tal, um ou mais recursos de uma combinação reivindicada podem, em alguns casos, ser removidos da combinação e a combinação reivindicada pode ser direcionada para uma subcombinação ou variação de uma subcombinação.
[198] De modo similar, embora operações sejam mostradas nos desenhos em uma ordem em particular, isso não deveria ser compreendido como exigência que tais operações sejam realizadas na ordem em particular mostrada ou em ordem sequencial, ou que todas as operações ilustradas sejam realizadas para alcançar resultados desejáveis. Em certas circunstâncias, o processamento paralelo e de multitarefas pode ser vantajoso. Ademais, a separação de vários componentes de sistema nas realizações descritas acima não deve ser entendida com exigências para tal separação em todas as realizações e deve-se entender que os sistemas e componentes de programa descritos podem ser geralmente integrados em um único produto de software ou compactados em múltiplos produtos de software.
[199] Modalidades particulares da matéria foram descritas. Outras modalidades estão no escopo das reivindicações apresentadas a seguir. Por exemplo, as ações citadas nas reivindicações podem ser realizadas em uma ordem diferente e ainda assim alcançar os resultados desejáveis. Como exemplo, os processos descritos nas figuras anexas, não exigem necessariamente a ordem particular representada, ou a ordem sequencial, para obter resultados desejáveis. Em determinadas implantações, o processamento paralelo e de multitarefas pode ser vantajoso.
Claims (14)
1. Perfurador ósseo (310, 410, 510, 610, 710, 810, 910, 1010) que compreende: uma haste (311, 411, 511, 611, 711, 811, 911, 1011) configurada para ser fixável de modo liberável a um motor para girar o perfurador ósseo em torno de um eixo de rotação (305, 440, 540, 640, 740, 840, 940, 1040); e um corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012) que se estende a partir da haste, sendo que o corpo de perfuração inclui uma extremidade de haste onde o corpo de perfuração se estende a partir da haste e uma extremidade livre (320, 413, 513, 613, 713, 813, 913) em uma extremidade do corpo de perfuração que é oposta à extremidade de haste, sendo que o corpo de perfuração inclui uma porção de corte entre a extremidade de haste e a extremidade livre, sendo que o corpo de perfuração tem um centro de massa (330a, 330b, 441, 541, 641, 741, 841, 941, 1041) em cada corte transversal do corpo de perfuração, caracterizado pelo fato de que um centro de massa de um corte transversal na extremidade de haste é deslocado do eixo de rotação e um centro de massa de um corte transversal na extremidade livre está situado no eixo de rotação, em que a distância de deslocamento (442, 542, 642, 742, 842, 942, 1042) do centro de massa do eixo de rotação diminui de modo linear da extremidade de haste até a extremidade livre.
2. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que os centros de massa (330a, 330b, 441, 541, 641, 741, 841, 941, 1041) dos cortes transversais consecutivos entre a extremidade de haste e a extremidade livre (320, 413, 513, 613, 713, 813, 913) formam uma trajetória de massa, e em que pelo menos uma porção da trajetória de massa é deslocada do eixo de rotação (305, 440, 540, 640, 740, 840, 940, 1040).
3. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que os centros de massa (330a, 330b, 441, 541, 641, 741, 841, 941, 1041) formam uma espiral ao redor do eixo de rotação (305, 440, 540, 640, 740, 840, 940, 1040).
4. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que o corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012) tem um diâmetro substancialmente constante da extremidade de haste até a extremidade livre (320, 413, 513, 613, 713, 813, 913).
5. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que o corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012) é afunilado a partir da extremidade de haste até a extremidade livre (320, 413, 513, 613, 713, 813, 913) de modo que a extremidade de haste tenha um diâmetro de corte maior do que a extremidade livre.
6. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que o corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012) é afunilado a partir da extremidade livre (320, 413, 513, 613, 713, 813, 913) até a extremidade de haste de modo que a extremidade livre tenha um diâmetro de corte maior do que a extremidade de haste.
7. Perfurador ósseo, de acordo com a reivindicação 5 ou 6, caracterizado pelo fato de que o corpo afunilado inclui um primeiro corte transversal e um segundo corte transversal, em que o primeiro corte transversal tem uma primeira geometria; e em que o segundo corte transversal tem uma segunda geometria diferente da primeira geometria.
8. Perfurador ósseo, de acordo com a reivindicação 5 ou 6, caracterizado pelo fato de que o corpo afunilado corta ao longo de um eixo duplo, sendo que o eixo duplo compreende um primeiro eixo correspondente ao eixo central de rotação e um segundo eixo correspondente a uma trajetória de massa deslocada que gira ao redor do eixo central.
9. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que uma porção do corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012) próxima à extremidade livre tem bordas de corte embotadas.
10. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que o perfurador ósseo (310, 410, 510, 610, 710, 810, 910, 1010) é constituído de uma liga superelástica.
11. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que a porção de corte é dimensionada para preparar uma osteotomia que tem um diâmetro dentro de uma faixa de cerca de 1,5 milímetros a cerca de 8,0 milímetros.
12. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que o perfurador ósseo (310, 410, 510, 610, 710, 810, 910, 1010) é dimensionado para preparar uma osteotomia que tem uma profundidade suficiente para receber implantes dentais com comprimentos que variam de cerca de 8 milímetros a cerca de 18 milímetros.
13. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que tem pelo menos uma passagem de irrigação longitudinal que atravessa uma porção de colar do perfurador ósseo (310, 410, 510, 610, 710, 810, 910, 1010) e atravessa um núcleo ou trama do perfurador saindo de modo lateral e distal, em que a passagem é configurada para permitir o fluxo de fluido de irrigação para um perímetro lateral e ponta do perfurador ósseo.
14. Perfurador ósseo, de acordo com a reivindicação 1, caracterizado pelo fato de que compreende adicionalmente um ou mais marcadores de profundidade ou medidores de profundidade no corpo de perfuração (312, 412, 512, 612, 712, 812, 912, 1012).
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361868276P | 2013-08-21 | 2013-08-21 | |
| US61/868,276 | 2013-08-21 | ||
| US201361899705P | 2013-11-04 | 2013-11-04 | |
| US61/899,705 | 2013-11-04 | ||
| PCT/US2014/051916 WO2015026959A2 (en) | 2013-08-21 | 2014-08-20 | Precessional-motion bone and dental drilling tools and bone harvesting apparatus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112016003714A2 BR112016003714A2 (pt) | 2017-08-01 |
| BR112016003714B1 true BR112016003714B1 (pt) | 2022-03-29 |
Family
ID=52480523
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112016003714-6A BR112016003714B1 (pt) | 2013-08-21 | 2014-08-20 | Perfurador ósseo |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US9277925B2 (pt) |
| EP (2) | EP3035871B1 (pt) |
| BR (1) | BR112016003714B1 (pt) |
| CA (1) | CA2922053A1 (pt) |
| WO (2) | WO2015026959A2 (pt) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9232953B2 (en) | 2012-10-08 | 2016-01-12 | Peter Bono | Cutting tool for bone, cartilage, and disk removal |
| WO2014118587A1 (fr) | 2013-01-30 | 2014-08-07 | Maillefer Instruments Holding Sàrl | Instrument pour l'alésage des canaux radiculaires dentaires |
| CH707745B1 (fr) * | 2013-03-12 | 2017-05-31 | Fkg Dentaire S A | Instrument endodontique, notamment pour l'alésage d'un canal radiculaire. |
| WO2015026959A2 (en) | 2013-08-21 | 2015-02-26 | Scianamblo Michael J | Precessional-motion bone and dental drilling tools and bone harvesting apparatus |
| DE102014108513A1 (de) * | 2014-06-17 | 2015-12-17 | Franz Haimer Maschinenbau Kg | Rotationsschneidwerkzeug |
| US20160022879A1 (en) * | 2014-07-24 | 2016-01-28 | Jared Ruben Hillel FORAN | Hypoallergenic orthopedic surgical instruments and methods |
| CN105676380B (zh) | 2014-11-21 | 2019-07-12 | 泰科电子(上海)有限公司 | 光缆布线系统和光缆连接组件 |
| US20160228130A1 (en) * | 2015-02-09 | 2016-08-11 | Cutting Edge Medical Llc | Surgical Drill Bit |
| KR102563551B1 (ko) | 2016-01-14 | 2023-08-04 | 후아이스 아이피 홀딩 엘엘씨 | 개량된 세로 홈 외형을 가진 자가이식 공구 및 상기 공구의 사용 방법 |
| ES2905457T3 (es) * | 2016-01-29 | 2022-04-08 | Nobel Biocare Services Ag | Herramienta de técnica dental |
| EP3246120A1 (de) * | 2016-05-18 | 2017-11-22 | HILTI Aktiengesellschaft | Metallbohrer |
| US10595961B2 (en) * | 2017-03-27 | 2020-03-24 | Michael J. Scianamblo | Endodontic instruments displaying compressibility |
| KR102553000B1 (ko) * | 2017-03-29 | 2023-07-06 | 덴츠플라이 시로나 인코포레이티드 | 파라볼릭 인스트루먼트 |
| US20190076932A1 (en) * | 2017-09-14 | 2019-03-14 | Spirit Aerosystems, Inc. | Apparatus and method for minimizing elongation in drilled holes |
| US11191616B1 (en) * | 2017-10-21 | 2021-12-07 | David W. Kelliny | Access guide and drill kit to be used with same for endodontic access cavity preparation and method of use |
| EP3700439B1 (en) | 2017-10-23 | 2024-05-15 | Globus Medical, Inc. | Rotary oscillating and linearly reciprocating surgical tool |
| USD884172S1 (en) | 2018-01-12 | 2020-05-12 | Peter L. Bono | Surgical cutting tool |
| US10582933B2 (en) | 2018-03-22 | 2020-03-10 | Capstone Surgical Techologies, LLC | Oscillating surgical cutting tool |
| WO2019204644A1 (en) * | 2018-04-18 | 2019-10-24 | Scianamblo Michael J | Bone matter collection apparatuses |
| GB2573524B (en) * | 2018-05-08 | 2023-01-18 | Prima Dental Mfg Limited | Dental milling tool |
| JP6670422B1 (ja) * | 2018-06-28 | 2020-03-18 | 株式会社アライドマテリアル | リーマ |
| CN113164225B (zh) | 2018-11-06 | 2023-02-21 | 胡维斯Ip控股公司 | 用于深范围应用的自体移植工具 |
| EP4023375A4 (en) * | 2019-08-27 | 2022-10-26 | Sumitomo Electric Hardmetal Corp. | DRILL |
| JP7418183B2 (ja) * | 2019-11-11 | 2024-01-19 | マニー株式会社 | 歯科用ファイル及び歯科用ファイルの製造方法 |
| KR102581637B1 (ko) * | 2021-01-28 | 2023-09-25 | (주)메디메카 | 치아 임플란트 시술용 드릴 |
Family Cites Families (111)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2930264A (en) * | 1958-07-11 | 1960-03-29 | Microtron Inc | Reamers |
| US3384085A (en) * | 1964-07-03 | 1968-05-21 | Robert M. Hall | Surgical cutting tool |
| US3400617A (en) * | 1966-07-18 | 1968-09-10 | Frank E. Sanborn | Drill bit tip |
| US3583821A (en) * | 1969-04-02 | 1971-06-08 | Melvin H Shaub | Chip catcher |
| US3824026A (en) | 1973-03-19 | 1974-07-16 | T Gaskins | Cutting lead tips for drill bits |
| US4044468A (en) | 1976-05-03 | 1977-08-30 | Henry Kahn | Handle for cutting and abrading instruments useful in the practice of endodontia |
| JPS52156494A (en) * | 1976-06-22 | 1977-12-26 | Toshiba Corp | Drill for working taper hole |
| SU637207A1 (ru) * | 1977-07-18 | 1978-12-15 | Владимирский политехнический институт | Сверло спиральное |
| DE2742143C2 (de) | 1977-09-19 | 1984-08-23 | Siemens AG, 1000 Berlin und 8000 München | Verfahren zur Herstellung von verschmierungsfreien Bohrungen bei aus Kunststoff gebildeten Leiterplatten |
| DE2742104C2 (de) | 1977-09-19 | 1984-04-12 | Siemens AG, 1000 Berlin und 8000 München | Bohrer aus Hartmetall zum Bohren von Kontaktlöchern in Leiterplatten u.dgl. |
| US4457710A (en) | 1979-08-03 | 1984-07-03 | Inventive Technology International | Dental instrument |
| US4332561A (en) | 1979-08-03 | 1982-06-01 | Inventive Technology International, Inc. | Dental file |
| US4538989A (en) | 1979-10-01 | 1985-09-03 | Dentsply International, Inc. | Dental reamer |
| US4353698A (en) | 1979-12-20 | 1982-10-12 | Inventive Technology International, Inc. | Dental tool |
| JPS6040328B2 (ja) | 1981-01-21 | 1985-09-10 | オ−エスジ−株式会社 | 切削工具 |
| US4456411A (en) * | 1981-08-10 | 1984-06-26 | Burke Clement | Twist drill |
| US4549538A (en) * | 1982-11-12 | 1985-10-29 | Zimmer, Inc. | Pin inserter sheath |
| US4536159A (en) | 1983-02-08 | 1985-08-20 | Roane James B | Endodontic instrument |
| CH651746A5 (fr) | 1983-03-29 | 1985-10-15 | Flueckiger Et Huguenin S A | Instrument dentaire pour l'alesage des canaux. |
| DK165662C (da) | 1985-04-15 | 1993-05-24 | Sven Karl Lennart Goof | Vaerktoej, isaer til brug ved rensning af tandrodskanaler, samt drivelement hertil |
| US4762445A (en) * | 1985-06-03 | 1988-08-09 | Precorp, Inc. | Composite sintered twist drill |
| JPS62241606A (ja) * | 1986-04-09 | 1987-10-22 | Mitsubishi Motors Corp | 切削用ドリル |
| US4842451A (en) * | 1988-02-05 | 1989-06-27 | Dugger Ben A | Deburring drill bit |
| US4934934A (en) | 1988-11-04 | 1990-06-19 | Quality Dental Products, Inc. | Dental file/reamer instrument |
| US4889487A (en) | 1988-11-23 | 1989-12-26 | Lovaas Leeland M | Endodontic files |
| US5888036A (en) | 1990-02-27 | 1999-03-30 | Hitachi Seiko, Ltd. | Drill bit and step feeding method |
| US5743916A (en) * | 1990-07-13 | 1998-04-28 | Human Factors Industrial Design, Inc. | Drill guide with removable ferrules |
| US5106298A (en) | 1991-04-03 | 1992-04-21 | Heath Derek E | Endodontic dental instrument |
| US5190548A (en) | 1991-04-10 | 1993-03-02 | Linvatec Corporation | Surgical reamer |
| US5527205A (en) | 1991-11-05 | 1996-06-18 | Tulsa Dental Products, L.L.C. | Method of fabricating an endodontic instrument |
| JPH06320323A (ja) | 1993-05-19 | 1994-11-22 | Toshiba Tungaloy Co Ltd | 切削工具 |
| US5498158A (en) | 1994-02-14 | 1996-03-12 | Wong; Nelson J. | Color-coded endodontic cutting instruments and color-code system and method |
| US5897316A (en) | 1994-04-28 | 1999-04-27 | Buchanan; Leonard Stephen | Endodontic treatment system |
| JP3164479B2 (ja) * | 1994-11-01 | 2001-05-08 | 兼房株式会社 | 回転穿孔工具 |
| WO1996022060A1 (en) | 1995-01-17 | 1996-07-25 | Johnson William B | An improved method of endodontic preparation of a root canal and a file set for use in the method |
| US5584617A (en) | 1995-04-04 | 1996-12-17 | International Business Machines Corporation | Single flute drill for drilling holes in printed circuit boards and method of drilling holes in a printed circuit board |
| US5503554A (en) | 1995-04-11 | 1996-04-02 | Schoeffel; G. John | Endodontic files |
| US5605460A (en) | 1995-04-26 | 1997-02-25 | Tulsa Dental Products, L.L.C. | Endodontic instrument and procedure |
| IT1278092B1 (it) | 1995-06-06 | 1997-11-17 | Francesco Riitano | Strumento endodontico per l'allargamento meccanico rapido dell'imbocco canalare e la rettificazione mirata dei primi due terzi. |
| JP3307809B2 (ja) * | 1995-10-05 | 2002-07-24 | 兼房株式会社 | シャンク付回転工具 |
| US5716736A (en) | 1995-10-06 | 1998-02-10 | Midwest Research Institute | Solid lithium-ion electrolyte |
| EP0770362B1 (fr) | 1995-10-23 | 2001-02-21 | Maillefer Instruments S.A. | Jeu d'instruments dentaires de taille croissante |
| US5980250A (en) | 1995-12-11 | 1999-11-09 | Tycom Dental Corporation | Endodontic instrument |
| DE69621464T2 (de) | 1995-12-11 | 2003-01-23 | Ormco Corporation, Orange | Endodontisches instrument |
| US5735689A (en) | 1995-12-11 | 1998-04-07 | Tycom Dental Corporation | Endodontic dental instrument |
| US6419488B1 (en) | 1995-12-11 | 2002-07-16 | Ormco Corporation | Endodontic instrument having a chisel tip |
| CH691789A5 (fr) | 1995-12-20 | 2001-10-31 | Maillefer Instr Sa | Jeu d'instruments pour l'alésage des canaux radiculaires dentaires. |
| US5713736A (en) | 1996-05-01 | 1998-02-03 | Tulsa Dental Products, L.L.C. | Endodontic dental instrument |
| US5842862A (en) | 1996-11-27 | 1998-12-01 | Nissan; Roni | Endodontic tool |
| US5882198A (en) * | 1997-03-28 | 1999-03-16 | Ormco Corporation | Endodontic instrument having enhanced compliance at the tip |
| SE512187C2 (sv) * | 1997-04-30 | 2000-02-07 | Seco Tools Ab | Borr |
| JPH1198142A (ja) | 1997-07-25 | 1999-04-09 | Fujitsu Ltd | Abr通信制御方法及びabr通信制御装置 |
| US5984679A (en) | 1997-09-26 | 1999-11-16 | Ormco Corporation | Method of manufacturing superelastic endodontic files and files made therefrom |
| DE19841978C2 (de) * | 1998-09-14 | 2000-11-23 | Heller Dinklage Gmbh Geb | Bohrer |
| WO2000025698A1 (en) | 1998-10-30 | 2000-05-11 | Filhol Stuart J | Dental tool |
| US6702579B1 (en) | 1998-11-17 | 2004-03-09 | Gebruder Brasseler Gmbh & Co. Kg | Root canal instrument and method for the production thereof |
| US6299445B1 (en) | 1999-04-08 | 2001-10-09 | Ormco Corporation | Endodontic instrument, instrument blank and method of manufacture |
| DE19916103A1 (de) | 1999-04-09 | 2000-10-12 | Espe Dental Ag | Verfahren zur Herstellung endodontischer Instrumente durch spanende Formgebung mit geometrisch bestimmter Schneide und schneidendem Abtrag |
| FR2798277B1 (fr) | 1999-09-10 | 2002-04-19 | Micro Mega Sa | Instrument canalaire du type alesoir dentaire et procedes de realisation |
| US7249414B2 (en) | 1999-09-10 | 2007-07-31 | Micro Mega, S.A. | Method for making a root canal instrument |
| US6312432B1 (en) | 2000-03-02 | 2001-11-06 | Nemco Medical, Inc. | Bone drill |
| DE10031968A1 (de) | 2000-06-30 | 2002-01-10 | Hilti Ag | Bohrer für Gestein |
| US6641395B2 (en) | 2000-08-02 | 2003-11-04 | Nobel Biocare Ab | Endosseous implant drill |
| EP1184003B1 (fr) | 2000-09-04 | 2003-07-02 | Maillefer Instruments Holding SA | Instruments pour le traitement de canaux radiculaires dentaires |
| DE10052016A1 (de) * | 2000-10-20 | 2002-05-08 | Horn P Hartmetall Werkzeugfab | Rotierendes Werkzeug, insbesondere Fräswerkzeug |
| JP4048709B2 (ja) | 2000-11-09 | 2008-02-20 | 三菱マテリアル株式会社 | ドリル |
| JP4239414B2 (ja) | 2001-01-10 | 2009-03-18 | 三菱マテリアル株式会社 | ドリル |
| FR2821000B1 (fr) | 2001-02-20 | 2003-08-22 | Jean Claude Rouiller | Instrument d'alesage, en particulier pour l'alesage de canaux dentaires |
| US6966774B2 (en) | 2001-08-16 | 2005-11-22 | Cloudland Institute, Llc. | Endodontic instrument having notched cutting surfaces |
| EP1997575B1 (en) * | 2001-12-05 | 2011-07-27 | Baker Hughes Incorporated | Consolidated hard material and applications |
| DE50304177D1 (de) | 2002-02-28 | 2006-08-24 | Bosch Gmbh Robert | Verfahren zur Herstellung eines Bohrers oder Fräsers |
| US20040023186A1 (en) | 2002-05-16 | 2004-02-05 | Mcspadden John T. | Multi-tapered endodontic file |
| EP1562513A2 (en) | 2002-09-06 | 2005-08-17 | Cloudland Institute LLC | Precision cast dental instrument |
| DE10243104A1 (de) | 2002-09-17 | 2004-03-25 | Gebr. Brasseler Gmbh & Co. Kg | Rotierendes Instrument aus Keramik |
| US6929078B1 (en) | 2002-11-21 | 2005-08-16 | Astec Industries, Inc. | Apparatus for use in enlarging a borehole |
| US7033359B2 (en) | 2003-04-21 | 2006-04-25 | Moshe Meller | Rotary apparatus for grafting and collecting bone |
| FR2854054B1 (fr) * | 2003-04-24 | 2005-07-08 | Rouiller Jean Claude | Instrument pour l'alesage de canaux radiculaires |
| US7094056B2 (en) | 2003-05-01 | 2006-08-22 | Scianamblo Michael J | Endodontic instrument having reversed helix |
| US7955078B2 (en) | 2003-05-01 | 2011-06-07 | Scianamblo Michael J | Endodontic instruments for preparing endodontic cavity spaces |
| US7731498B2 (en) | 2003-05-16 | 2010-06-08 | Mcspadden John T | Endododontic file with multi-tapered flutes |
| JP2005001088A (ja) | 2003-06-13 | 2005-01-06 | Osg Corp | 硬質被膜被覆部材、およびその製造方法 |
| US20050026109A1 (en) | 2003-07-30 | 2005-02-03 | Buchanan L. Stephen | Multi-tapered dental files |
| JP2005125455A (ja) * | 2003-10-24 | 2005-05-19 | Hakuseisha:Kk | ドリル及びガイド孔用カッター及び円孔穿設方法 |
| WO2005107627A2 (en) | 2004-05-05 | 2005-11-17 | Innovadontics, Inc. | Systems and methods for dispensing sealant in medical applications |
| US20060068362A1 (en) * | 2004-09-27 | 2006-03-30 | Ormco Corporation | Endodontic instrument with depth markers |
| US20060111724A1 (en) | 2004-11-24 | 2006-05-25 | Yeung Research | Bone harvesting drill bit for oral surgery |
| JP3801606B2 (ja) | 2004-12-01 | 2006-07-26 | ユニオンツール株式会社 | ドリル |
| JP2006152424A (ja) * | 2004-12-01 | 2006-06-15 | Osg Corp | 硬質被膜および硬質被膜被覆加工工具 |
| DE102005005982A1 (de) * | 2005-02-09 | 2006-08-17 | Günther & Co GmbH | Tieflochbohrer |
| ES2363981T3 (es) * | 2005-04-08 | 2011-08-22 | Michael J. Scianamblo | Instrumentos endodónticos plegables. |
| DE102005034010A1 (de) | 2005-07-18 | 2007-01-25 | Coltène/Whaledent GmbH + Co. KG | Wurzelkanalinstrument mit abrasiver Beschichtung und Verfahren zur Herstellung desselben |
| JP4809711B2 (ja) * | 2006-03-22 | 2011-11-09 | 日本プロジェクト株式会社 | ドリル |
| USD750246S1 (en) | 2006-04-10 | 2016-02-23 | Michael J. Scianamblo | Endodontic device |
| DE102007062539B4 (de) * | 2006-12-21 | 2012-08-23 | Stefan Rothenaicher | Bohrwerkzeug |
| DE102007024184A1 (de) * | 2007-05-24 | 2008-11-27 | Kennametal Inc. | Bohrer sowie Verfahren zum Bohren |
| KR101026648B1 (ko) | 2007-06-22 | 2011-04-04 | 히타치 쓰루 가부시키가이샤 | 심공 가공용 소경 드릴 및 미세 심공 가공 방법 |
| FR2919212B1 (fr) | 2007-07-26 | 2009-12-25 | Snecma | Foret ceramique pour percage grande vitesse de materiaux composites. |
| FR2935260A1 (fr) * | 2008-09-04 | 2010-03-05 | Michel David Oiknine | Dispositif medical (lime nikel-titane) de preparation et de mise en forme canalaire |
| US8721234B2 (en) * | 2009-02-24 | 2014-05-13 | Black & Decker Inc. | Depth gauge for drill bit |
| JP5385976B2 (ja) * | 2009-04-27 | 2014-01-08 | 京セラ株式会社 | ドリル及びこのドリルを用いる被削材の切削方法 |
| JP5067441B2 (ja) * | 2009-06-30 | 2012-11-07 | イビデン株式会社 | 切削ドリル及びプリント配線板の製造方法 |
| US8480682B2 (en) * | 2009-08-28 | 2013-07-09 | Zimmer Dental, Inc. | Device for limiting the drilling depth of a drill |
| US20110236853A1 (en) | 2010-03-25 | 2011-09-29 | Klad Corporation | Dental drill extension |
| US8916009B2 (en) | 2011-05-06 | 2014-12-23 | Dentsply International Inc. | Endodontic instruments and methods of manufacturing thereof |
| US20120004661A1 (en) | 2010-06-30 | 2012-01-05 | John Leppelmeier | Orthopedic bone drill |
| US8734068B2 (en) * | 2010-08-09 | 2014-05-27 | Kennametal Inc. | Cutting tool with unequal flute spacing |
| US20130170920A1 (en) * | 2011-01-31 | 2013-07-04 | Kyocera Corporation | Drill and method of manufacturing machined product using the same |
| FI9329U1 (fi) | 2011-03-21 | 2011-08-16 | Oulun Yliopisto | Luupora |
| US9078722B2 (en) | 2012-01-20 | 2015-07-14 | William B. Johnson | Multi-planar pre-curved rotary endodontic file |
| WO2014118587A1 (fr) | 2013-01-30 | 2014-08-07 | Maillefer Instruments Holding Sàrl | Instrument pour l'alésage des canaux radiculaires dentaires |
| WO2015026959A2 (en) | 2013-08-21 | 2015-02-26 | Scianamblo Michael J | Precessional-motion bone and dental drilling tools and bone harvesting apparatus |
-
2014
- 2014-08-20 WO PCT/US2014/051916 patent/WO2015026959A2/en active Application Filing
- 2014-08-20 US US14/464,596 patent/US9277925B2/en active Active
- 2014-08-20 BR BR112016003714-6A patent/BR112016003714B1/pt active IP Right Grant
- 2014-08-20 EP EP14838210.4A patent/EP3035871B1/en active Active
- 2014-08-20 CA CA2922053A patent/CA2922053A1/en not_active Abandoned
- 2014-08-20 WO PCT/US2014/051909 patent/WO2015026955A1/en active Application Filing
- 2014-08-20 EP EP19176206.1A patent/EP3590445B1/en active Active
- 2014-08-20 US US14/464,597 patent/US9271740B2/en active Active
-
2016
- 2016-02-25 US US15/053,296 patent/US10363615B2/en active Active
- 2016-03-07 US US15/062,626 patent/US20160207121A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US9277925B2 (en) | 2016-03-08 |
| EP3035871A4 (en) | 2017-04-05 |
| US20150057664A1 (en) | 2015-02-26 |
| EP3590445B1 (en) | 2022-11-16 |
| EP3590445A1 (en) | 2020-01-08 |
| US20160207121A1 (en) | 2016-07-21 |
| US9271740B2 (en) | 2016-03-01 |
| BR112016003714A2 (pt) | 2017-08-01 |
| CA2922053A1 (en) | 2015-02-26 |
| US10363615B2 (en) | 2019-07-30 |
| WO2015026955A4 (en) | 2015-04-16 |
| WO2015026955A1 (en) | 2015-02-26 |
| WO2015026959A2 (en) | 2015-02-26 |
| US20160192945A1 (en) | 2016-07-07 |
| US20150056032A1 (en) | 2015-02-26 |
| WO2015026959A3 (en) | 2015-04-09 |
| EP3035871A2 (en) | 2016-06-29 |
| EP3035871B1 (en) | 2019-05-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112016003714B1 (pt) | Perfurador ósseo | |
| JP5685593B2 (ja) | リブ付き外科用バー | |
| US5857995A (en) | Multiple bladed surgical cutting device removably connected to a rotary drive element | |
| EP2967593B1 (en) | Ultrasonic surgical drill | |
| EP2624762B1 (en) | Bone marrow harvesting device having flexible needle | |
| US20180161124A1 (en) | Axial stop gauge and jig guide for surgical drill | |
| JP6713416B2 (ja) | 組織除去用医療器具 | |
| WO2018006705A1 (zh) | 一种超声骨刀刀头 | |
| US12201308B2 (en) | Cartilage removal tool and method | |
| JP2013500073A (ja) | 髄内管内に空洞を切削するための手術器具 | |
| JP6888014B2 (ja) | 手術用ドリルビット | |
| CN106794026A (zh) | 用于切割组织的装置及方法 | |
| WO2008100413A1 (en) | Hollow reamer for medical applications | |
| WO2018071863A1 (en) | Universal keyless guided surgery system | |
| US10617430B2 (en) | Surgical bur with a single cutting flute | |
| CN110269662B (zh) | 取骨工具 | |
| CN203935240U (zh) | 椎间孔扩孔钻 | |
| CN107049412B (zh) | 医用把手、环锯系统及其手术方法 | |
| US9649124B2 (en) | Curved blade tissue shaver | |
| RU50399U1 (ru) | Устройство для выполнения остеотрепанации трубчатых костей | |
| CN206979529U (zh) | 关节突成形凸、凹锯 | |
| JP6161050B2 (ja) | 補綴体をプレス嵌めするための挿入穴を形成するための器具 | |
| CN105982701A (zh) | 微创手术用多角度钻铣工具 | |
| BR112021008626A2 (pt) | ferramenta de autoenxerto para aplicações de alcance profundo |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06F | Objections, documents and/or translations needed after an examination request according [chapter 6.6 patent gazette] | ||
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 20/08/2014, OBSERVADAS AS CONDICOES LEGAIS. |