WO2025079130A1 - 昇降装置 - Google Patents
昇降装置 Download PDFInfo
- Publication number
- WO2025079130A1 WO2025079130A1 PCT/JP2023/036697 JP2023036697W WO2025079130A1 WO 2025079130 A1 WO2025079130 A1 WO 2025079130A1 JP 2023036697 W JP2023036697 W JP 2023036697W WO 2025079130 A1 WO2025079130 A1 WO 2025079130A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- self
- piano wire
- link
- boosting
- lifting device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B7/00—Other common features of elevators
Definitions
- This disclosure relates to a lifting device.
- Patent Document 1 discloses a device that moves on a vertically installed rope, although it is not intended for installation in an elevator. Two sets of wheels are arranged above and below, sandwiching the rope from three directions at the same height, for a total of six wheels that move on the rope. When attaching this device to a rope, part of the casing is removed, the rope is inserted from the side, and part of the casing is closed. Furthermore, in order to press the wheels against the rope, it is necessary to adjust the length of the shaft that secures the wheels to the casing with a nut. As such, installing this device is time-consuming.
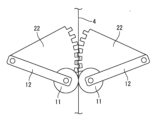
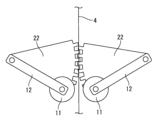
- the piano wire 4 serves as a reference for the horizontal position when installing rails or doors that guide the car.
- an elevator installation robot 5 is attached to one piano wire 4.
- the elevator installation robot 5 performs various tasks while moving up and down by itself, i.e., ascending and descending.
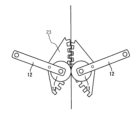
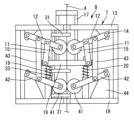
- Figure 10 is a top view showing the relationship between the piano wire 4 and the drive wheels 11 when there are three drive wheels 11.
- the drive wheels 11 are arranged at 120° intervals with respect to the piano wire 4.
- Three of each of the upper plate support parts 14, self-multiplying links 12, and angle interlocking links 15 are required.
- the other members are the same as those described above.
- the contact area between the piano wire 4 and the drive wheels 11 can be increased, and the load on the piano wire 4 and the drive wheels 11 can be reduced.
- the allowable weight of the elevator installation robot 5 can be increased.
- the drive wheels 11 are moved toward the piano wire 4 from three directions, there is an advantage that the piano wire 4 can be grasped more easily than when there are two drive wheels 11.
- the center of gravity of the machine body 7 is preferably below the drive wheels 11 and on or near the piano wire 4. Having the center of gravity in this position reduces the possibility of losing balance while traveling or working.
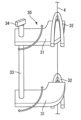
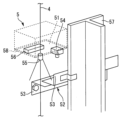
- the work unit 51 is composed of a laser sensor, a work unit control unit 56, etc., and measures the shape or dimensions of the elevator shaft 1.
- a plate 58 to which a LiDAR as a laser sensor and a work unit control unit 56 are fixed is fixed on the top plate 13 or under the bottom plate 19 of the elevator installation robot 5.
- the work unit control unit 56 is connected to the control unit or battery of the elevator installation robot 5, and obtains height information or power of the elevator installation robot 5.
- the shape and dimensions of the elevator shaft 1 can be obtained with high accuracy.
- information on the entire elevator shaft 1 can be obtained with high accuracy, so difficult points in equipment installation due to dimensions can be identified and countermeasures can be considered in advance.
Landscapes
- Manipulator (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/036697 WO2025079130A1 (ja) | 2023-10-10 | 2023-10-10 | 昇降装置 |
| JP2025551228A JPWO2025079130A1 (https=) | 2023-10-10 | 2023-10-10 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/036697 WO2025079130A1 (ja) | 2023-10-10 | 2023-10-10 | 昇降装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025079130A1 true WO2025079130A1 (ja) | 2025-04-17 |
Family
ID=95395346
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/036697 Pending WO2025079130A1 (ja) | 2023-10-10 | 2023-10-10 | 昇降装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025079130A1 (https=) |
| WO (1) | WO2025079130A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014005117A (ja) * | 2012-06-25 | 2014-01-16 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ昇降路内の長尺物点検装置及び長尺物点検方法 |
| JP2016160049A (ja) * | 2015-03-03 | 2016-09-05 | 学校法人神奈川大学 | 自走式移動装置 |
| WO2021038731A1 (ja) * | 2019-08-27 | 2021-03-04 | 三菱電機株式会社 | 搬送装置 |
| US20220144590A1 (en) * | 2020-11-07 | 2022-05-12 | Otis Elevator Company | Ropeless elevator propulsion system |
-
2023
- 2023-10-10 JP JP2025551228A patent/JPWO2025079130A1/ja active Pending
- 2023-10-10 WO PCT/JP2023/036697 patent/WO2025079130A1/ja active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014005117A (ja) * | 2012-06-25 | 2014-01-16 | Mitsubishi Electric Building Techno Service Co Ltd | エレベータ昇降路内の長尺物点検装置及び長尺物点検方法 |
| JP2016160049A (ja) * | 2015-03-03 | 2016-09-05 | 学校法人神奈川大学 | 自走式移動装置 |
| WO2021038731A1 (ja) * | 2019-08-27 | 2021-03-04 | 三菱電機株式会社 | 搬送装置 |
| US20220144590A1 (en) * | 2020-11-07 | 2022-05-12 | Otis Elevator Company | Ropeless elevator propulsion system |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025079130A1 (https=) | 2025-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US4078670A (en) | Cable-operated power manipulator | |
| US11053097B2 (en) | Magnet assembly for an electronic safety brake actuator (ESBA) | |
| JP2012024922A (ja) | ロボット | |
| CN111236661A (zh) | 一种建筑板材安装机器人 | |
| CN106458547B (zh) | 钢索吊车 | |
| CN102153007A (zh) | 双u型直线电机驱动的无绳提升机 | |
| CN109573632A (zh) | 三轴龙门码垛机 | |
| US10597265B2 (en) | Slider for use with a crane | |
| KR20040089576A (ko) | 리니어 모터를 구비한 드라이브, 이 드라이브를 구비한승강기 및 이 드라이브의 작동방법 | |
| WO2025079130A1 (ja) | 昇降装置 | |
| CN121986064A (en) | Lifting device | |
| US3768597A (en) | Elevator flexible guide clamp safety | |
| KR20200056691A (ko) | 중량물 운반용 수동 리프트 | |
| CN217372106U (zh) | 夹持装置 | |
| CN210654852U (zh) | 一种提升机 | |
| JP6692461B2 (ja) | エレベータ装置 | |
| CN223547531U (zh) | 应用于货物提升系统的制动定位装置 | |
| KR101765732B1 (ko) | 이송 장치 | |
| JP4195044B2 (ja) | エレベーター | |
| CN222370810U (zh) | 车门转运装置 | |
| EP4172097B1 (en) | Compact and portable lifting arrangement, conversion kit for a lifting arrangement, and a method to assemble such conversion kit | |
| KR100828693B1 (ko) | 오버 헤드 드롭 리프터 장치 | |
| JP7575917B2 (ja) | 乗客コンベアの制動機及びその動作確認治具 | |
| JP5523214B2 (ja) | エレベータ | |
| CN118770929A (zh) | 一种桁架设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23955382 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025551228 Country of ref document: JP Kind code of ref document: A |