WO2024202664A1 - 磁歪式トルクセンサ - Google Patents
磁歪式トルクセンサ Download PDFInfo
- Publication number
- WO2024202664A1 WO2024202664A1 PCT/JP2024/005424 JP2024005424W WO2024202664A1 WO 2024202664 A1 WO2024202664 A1 WO 2024202664A1 JP 2024005424 W JP2024005424 W JP 2024005424W WO 2024202664 A1 WO2024202664 A1 WO 2024202664A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- bobbin
- ring
- locking hole
- torque sensor
- side locking
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L3/00—Measuring torque, work, mechanical power, or mechanical efficiency, in general
- G01L3/02—Rotary-transmission dynamometers
- G01L3/04—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft
- G01L3/10—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating
- G01L3/101—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means
- G01L3/102—Rotary-transmission dynamometers wherein the torque-transmitting element comprises a torsionally-flexible shaft involving electric or magnetic means for indicating involving magnetic or electromagnetic means involving magnetostrictive means
Definitions
- This disclosure relates to a magnetostrictive torque sensor that measures the torque applied to a rotating shaft.
- a magnetostrictive torque sensor that measures the torque applied to a rotating shaft by utilizing the inverse magnetostrictive effect that occurs in the rotating shaft when torque is applied to the rotating shaft has been known for some time, for example as described in JP 2020-085814 A.
- the torque sensor described in JP 2020-085814 A is constructed by injection molding epoxy resin to cover and bond a detection unit having a resin bobbin, a detection coil formed by winding insulated wire around the bobbin, and a ferromagnetic ring arranged to cover the detection coils of the detection unit in order to suppress magnetic flux leakage to the outside.
- a magnetic circuit is formed through the rotating shaft, the bobbin on whose outer periphery the detection coil of the detection section is arranged, and the magnetic ring, so it is necessary to ensure good coaxiality between the rotating shaft, bobbin, and magnetic ring.
- the bobbin and magnetic ring must be bonded and fixed so that they cannot move relative to each other in the axial and circumferential directions, regardless of temperature changes.
- the torque sensor described in JP 2020-085814 A leaves room for improvement in terms of ensuring sufficient bonding strength between the bobbin and the magnetic ring.
- the resin material that constitutes the bobbin has a linear expansion coefficient that differs greatly from that of the metal material that constitutes the magnetic ring.
- the adhesion between the bobbin and the magnetic ring decreases with temperature changes, and there is a possibility that relative slippage (creep) between the bobbin and the magnetic ring, i.e., relative rotation and/or relative axial displacement, may occur.
- the bobbin and the magnetic ring In order to ensure good coaxiality between the bobbin and the magnetic ring, they need to be fitted together without any radial wobble, for example by using a spigot fit.
- the diameter (inner or outer diameter) of the fitting portion of the bobbin relative to the magnetic ring and the diameter (outer or inner diameter) of the magnetic ring relative to the bobbin need to be roughly the same. For this reason, even if the bobbin is elastically deformed when combining the bobbin and the magnetic ring, the claws get in the way and the bobbin and the magnetic ring cannot be fitted together.
- the present disclosure aims to realize a magnetostrictive torque sensor structure that can ensure sufficient bonding strength between the bobbin and the magnetic ring while ensuring good coaxiality between the bobbin and the magnetic ring, regardless of temperature changes.
- the magnetostrictive torque sensor of one embodiment of the present disclosure is a sensor that measures the torque applied to a rotating shaft having magnetostrictive properties, and includes a bobbin, a detection unit, a magnetic ring, and a positioning member.
- the bobbin has a bobbin side tube portion arranged around the rotation shaft, a cylindrical bobbin side mating surface, and a bobbin side locking hole.
- the detection unit has a detection coil arranged around the bobbin side tube portion.
- the magnetic ring has a ring side cylindrical portion arranged around the detection portion, a ring side mating surface that mates with the bobbin side mating surface, and a ring side locking hole.
- the positioning member spans between the bobbin side locking hole and the ring side locking hole.
- the bobbin side mating surface and the ring side mating surface can be mated together without any rattle in the radial direction. More preferably, the bobbin side mating surface and the ring side mating surface can be mated together in a spigot-fit manner, which is a clearance fit without any rattle in the radial direction.
- the bobbin side locking hole can be inserted radially through the bobbin, and the positioning member can be protruded radially from one of the openings on either radial side of the bobbin side locking hole that is radially opposite the magnetic ring side.
- the magnetostrictive torque sensor of one embodiment of the present disclosure may have multiple combinations of the bobbin side locking hole, the ring side locking hole, and the positioning member.
- the magnetostrictive torque sensor of one embodiment of the present disclosure may have one combination of the bobbin side locking hole, the ring side locking hole, and the positioning member.
- the positioning member can be configured with a spring pin.
- the positioning member can be configured with a columnar or cylindrical pin, screw, etc.
- the bobbin side mating surface can be provided on the inner peripheral surface of the bobbin, and the ring side mating surface can be provided on the outer peripheral surface of the magnetic ring.
- the bobbin can have a connection plate portion extending radially outward from one axial end of the bobbin side tube portion, and an outer diameter side tube portion extending from the radially outer end of the connection plate portion toward the other axial side.
- the inner peripheral surface of the bobbin is formed by the inner peripheral surface of the outer diameter side tube portion.
- the bobbin side locking hole penetrates the outer diameter side tube portion in the radial direction.
- the ring side fitting surface is provided at one axial end of the outer peripheral surface of the magnetic ring. The ring side locking hole opens into the ring side fitting surface.
- the magnetostrictive torque sensor of one embodiment of the present disclosure can ensure good coaxiality between the bobbin and the magnetic ring, while also ensuring sufficient bonding strength between the bobbin and the magnetic ring regardless of temperature changes.
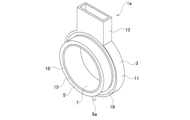
- FIG. 1 is a perspective view showing a magnetostrictive torque sensor according to a first embodiment of the present disclosure.
- FIG. 2 is a cross-sectional view showing a magnetostrictive torque sensor according to a first example.
- FIG. 3 is an exploded perspective view showing the magnetostrictive torque sensor of the first example with the detection portion omitted.
- FIG. 4 is a schematic cross-sectional view showing an example of the detection unit.
- Figures 5(A) and 5(B) are expanded views of detection coils viewed from the radially outside for another example of the detection unit, where Figure 5(A) is a view showing the first detection coil and the fourth detection coil, and Figure 5(B) is a view showing the second detection coil and the third detection coil.
- FIG. 5(A) is a view showing the first detection coil and the fourth detection coil
- Figure 5(B) is a view showing the second detection coil and the third detection coil.
- FIG. 6 is a diagram showing a detection circuit including four detection coils.
- FIG. 7 is a perspective view showing a magnetostrictive torque sensor according to a second embodiment of the present disclosure.
- FIG. 8 is an enlarged cross-sectional view of a main portion of the magnetostrictive torque sensor of the second embodiment.
- FIG. 9 is a diagram for explaining a method for preventing the magnetostrictive torque sensor of the second example from rotating relative to the housing.
- FIG. 10 is a perspective view showing a magnetostrictive torque sensor according to a third example of an embodiment of the present disclosure.
- FIG. 11 is a diagram for explaining a method for preventing the magnetostrictive torque sensor of the third example from rotating relative to the housing.
- FIG. 1 A first example of an embodiment of the present disclosure will be described with reference to FIGS. 1 to 3.
- FIG. 1 A first example of an embodiment of the present disclosure will be described with reference to FIGS. 1 to 3.
- the magnetostrictive torque sensor 1 in this example is a sensor that measures the torque applied to a rotating shaft 2 (see Figure 2) that has magnetostrictive properties, and includes a bobbin 3, a detection unit 4, a magnetic ring 5, and a positioning member 6.
- the axial, radial, and circumferential directions of the magnetostrictive torque sensor 1 refer to the axial, radial, and circumferential directions of the rotating shaft 2.
- the axial, radial, and circumferential directions of the rotating shaft 2 coincide with the axial, radial, and circumferential directions of the bobbin 3, coincide with the axial, radial, and circumferential directions of the detection unit 4, and coincide with the axial, radial, and circumferential directions of the magnetic ring 5.
- the bobbin 3 has a bobbin side tube portion 7 arranged around the rotating shaft 2, a cylindrical bobbin side mating surface 8, and a bobbin side locking hole 9.
- the bobbin 3 is made of synthetic resin, which is a non-magnetic and non-conductive (insulating) material.
- the bobbin 3 is made as a whole by injection molding of synthetic resin.
- the bobbin 3 can also be made by combining multiple parts.
- the bobbin side cylinder portion 7 has a portion around its periphery, specifically its outer or inner periphery, where the detection coil 28 of the detection unit 4 is disposed.
- the bobbin side cylinder portion 7 has a cylindrical shape. That is, the bobbin side cylinder portion 7 has an inner circumferential surface whose inner diameter does not change along the axial direction, and an outer circumferential surface whose outer diameter does not change along the axial direction.
- the bobbin side cylinder portion 7 is also disposed coaxially with the rotating shaft 2 with the magnetostrictive torque sensor 1 supported and fixed to the non-rotating member 20. In this state, the circumferential surface of the bobbin side cylinder portion 7 and the circumferential surface of the rotating shaft 2 face each other.
- the inner circumferential surface of the bobbin side cylinder portion 7 and the outer circumferential surface of the rotating shaft 2 face each other closely with a small gap between them.
- the bobbin side fitting surface 8 is provided on the peripheral surface of any part of the bobbin 3. Specifically, the bobbin side fitting surface 8 is provided on the whole or part of the bobbin side tube portion 7 or a tube portion provided separately from the bobbin side tube portion 7, such as, but not limited to, the outer diameter side tube portion 11 provided on the outer diameter side thereof or the inner diameter side tube portion provided on the inner diameter side thereof. In this case, it is preferable that the bobbin side fitting surface 8 is configured by a single cylindrical surface whose diameter does not change in the axial direction.
- the bobbin side locking hole 9 is provided in any part of the bobbin 3.
- the bobbin side locking hole 9, in combination with the positioning member 6 and the ring side locking hole 15 of the magnetic ring 5, has the function of preventing relative displacement (creep) between the bobbin 3 and the magnetic ring 5, particularly relative displacement in the axial direction.
- the arrangement of the bobbin side locking hole 9 is not particularly limited, and can be set appropriately at any position on the bobbin 3 depending on factors such as ease of assembly.
- the bobbin side locking hole 9 can be formed in any direction including the radial or axial direction of the bobbin 3 as long as it can achieve its function, but it is preferable to form it in the radial direction of the bobbin 3.
- the bobbin side locking hole 9 can be configured as a through hole or a bottomed hole in relation to the ring side locking hole 15, so long as it is possible to place (insert) the positioning member 6 inside the bobbin side locking hole 9 and inside the ring side locking hole 15.
- the opening shape of the bobbin side locking hole 9 can be set arbitrarily depending on the shape of the positioning member.
- the bobbin 3 has a connection plate portion 10 that extends radially outward from the end portion on one axial side (right side in FIG. 2) of the bobbin side tube portion 7, and an outer diameter side tube portion 11 that extends from the radially outer end portion of the connection plate portion 10 toward the other axial side.
- the bobbin side fitting surface 8 is formed by the entire inner circumferential surface of the outer diameter side tube portion 11.
- the bobbin side locking hole 9 penetrates the outer diameter side tube portion 11 in the radial direction.
- connection plate portion 10 has a hollow circular end face shape when viewed from the axial direction. That is, the connection plate portion 10 extends from one axial end of the bobbin side tube portion 7 toward the radially outward over the entire circumference. The radially outer end of the connection plate portion 10 is connected to one axial end of the outer diameter side tube portion 11. In other words, the connection plate portion 10 radially connects one axial end of the bobbin side tube portion 7 and one axial end of the outer diameter side tube portion 11.
- the outer diameter side tube portion 11 is provided in a portion of the bobbin 3 excluding the portion provided with the connector accommodating portion 12, and extends from the radially outer end of the connection plate portion 10 toward the other axial side (left side in FIG. 2). That is, in this example, the outer diameter side tube portion 11 has an overall notched cylindrical shape. However, in a structure without the connector accommodating portion 12, it extends from the entire radially outer end of the connection plate portion 10 toward the other axial side.
- the outer diameter side tube portion 11 is arranged coaxially with the bobbin side tube portion 7 and the bobbin side mating surface 8.
- the outer diameter side tube portion 11 has an axial length that is shorter than the axial length of the bobbin side tube portion 7. Therefore, the other axial side portion of the bobbin side tube portion 7 protrudes further in the axial direction than the other axial end portion of the outer diameter side tube portion 11.
- the axial length of the outer diameter side tube portion 11 is not particularly limited, but can be at least three times, and preferably at least four times, the diameter of the bobbin side locking hole 9. In the illustrated example, the axial length of the outer diameter side tube portion 11 is approximately three times the diameter of the bobbin side locking hole 9.
- the bobbin side mating surface 8 is provided on the inner peripheral surface of the outer diameter side tube portion 11.
- the bobbin side mating surface 8 is provided on the entire inner peripheral surface of the outer diameter side tube portion 11.
- the bobbin side locking hole 9 penetrates the outer diameter side tubular portion 11 in the radial direction.
- the bobbin side locking hole 9 opens to both the bobbin side mating surface 8 provided on the inner peripheral surface of the outer diameter side tubular portion 11 and the outer peripheral surface of the outer diameter side tubular portion 11.
- the bobbin side locking hole 9 is configured as a circular hole having a circular opening shape.
- the bobbin side locking hole 9 is provided at any position in the circumferential direction of the outer diameter side tube portion 11.
- the bobbin side locking hole 9 is provided in a portion of the outer diameter side tube portion 11 that is slightly shifted in the circumferential direction from the portion to which the radially inner end of the connector accommodating portion 12 is connected, specifically, in a portion that is shifted about 45 degrees from the circumferential center position of the connector accommodating portion 12.
- the bobbin 3 further includes a connector housing 12.
- the connector housing 12 houses a connector for electrically connecting a cable extending from a detection circuit that is external to the magnetostrictive torque sensor 1 to the detection unit 4.
- the connector accommodating portion 12 has a rectangular tubular shape that extends in the radial direction of the bobbin 3.
- the radially inner end of the connector accommodating portion 12 opens into the bobbin side mating surface 8 provided on the inner peripheral surface of the outer diameter side tubular portion 11.
- the shape of the connector housing can be changed as appropriate depending on the shape of the connector housed therein.
- the connector housing can be omitted.
- the detection unit 4 has a detection coil 28 arranged around the bobbin side cylinder portion 7.
- the detection coil 28 is arranged on the outer periphery of the bobbin side cylinder portion 7.
- the detection unit 4 changes its output signal according to the magnitude and direction of the torque applied to the rotating shaft 2.
- the output signal of the detection unit 4 is transmitted to the detection circuit via the connector and cable housed in the connector housing portion 12.
- the shape, number, arrangement, and other configuration of the detection coils are not particularly limited.
- the detection unit 4 can be configured by arranging two detection coils 23a, 23b, each of which is made by winding an insulated electric wire around the bobbin 3 in a circular or spiral shape, side by side in the axial direction.
- two magnetic change sections 26a, 26b are provided on the outer peripheral surface of the rotating shaft 2, each of which is composed of multiple alternating magnetic sections 24a, 24b having magnetic anisotropy and multiple non-magnetic sections 25a, 25b having no magnetic anisotropy.
- the magnetic section 24a and non-magnetic section 25a constituting the first magnetic change section 26a extend in a direction inclined by a predetermined angle (for example, +45 degrees) with respect to the axial direction of the rotating shaft 2.
- the magnetic section 24b and non-magnetic section 25b constituting the second magnetic change section 26b extend in a direction inclined by a predetermined angle (for example, -45 degrees) with respect to the axial direction of the rotating shaft 2 in the opposite direction to the inclination direction of the magnetic section 24a and non-magnetic section 25a of the first magnetic change section 26a.
- a predetermined angle for example, -45 degrees
- the first detection coil 23a is placed around the first magnetic change portion 26a
- the second detection coil 23b is placed around the second magnetic change portion 26b.
- the detection circuit determines the difference in voltage (induced electromotive force) between the detection coils 23a, 23b, and based on this difference, the direction and magnitude of the torque applied to the rotating shaft 2 are determined.
- the detection unit 4 can be constructed by stacking four detection coils 28a-28d in the radial direction, each of which is made up of multiple parallelogram coil pieces 27a-27d arranged around the entire circumference when viewed from the radial direction.
- Each of the detection coils 28a to 28d is formed by winding an insulated electric wire around the bobbin 3.
- the outer peripheral surface of the bobbin 3 is provided with a first inclined groove 29a inclined at a predetermined angle (for example, +45 degrees) with respect to the axial direction of the bobbin 3, and a second inclined groove 29b inclined at a predetermined angle (for example, -45 degrees) in the opposite direction to the first inclined groove 29a with respect to the axial direction of the bobbin 3.
- the coil piece 27a constituting the first detection coil 28a and the coil piece 27d constituting the fourth detection coil 28d are formed by winding an insulated electric wire along the first inclined groove 29a.
- the coil piece 27b constituting the second detection coil 28b and the coil piece 27c constituting the third detection coil 28c are formed by winding an insulated electric wire along the second inclined groove 29b.
- the detection coils 28a to 28d are connected in a ring shape as shown in FIG. 6 to form a detection circuit 30.
- an AC voltage is applied between contact A between the first detection coil 28a and the second detection coil 28b and contact C between the third detection coil 28c and the fourth detection coil 28d.
- the voltages between contact B between the second detection coil 28b and the third detection coil 28c and contact D between the first detection coil 28a and the fourth detection coil 28d are detected, and the direction and magnitude of the torque transmitted by the rotating shaft 2 are determined based on these voltages.
- the rotating shaft 2 is configured in a columnar or cylindrical shape from an iron-based alloy having magnetostrictive properties.
- a shot peening process can be performed on the portion of the outer circumferential surface of the rotating shaft 2 that is located radially inside the detection unit 4 to form a modified layer with improved magnetostrictive properties.
- the detection unit is not limited to the two examples described above, and any configuration can be adopted as long as it can detect changes in the magnetic field present around the rotating shaft as torque is applied to the rotating shaft.
- the detection coil that constitutes the detection unit 4 is not limited to a coil formed by winding an insulated wire around the bobbin 3, but can also be formed by a pattern printed on a flexible printed circuit board (FPC).
- FPC flexible printed circuit board
- the magnetic ring 5 is also called a back yoke, and has the function of preventing the magnetic flux generated by the detection coil 28 that constitutes the detection unit 4 from leaking to the outside.
- the magnetic ring 5 has a ring side cylindrical portion 13 that is arranged around the detection unit 4, a ring side mating surface 14 that mates with the bobbin side mating surface 8, and a ring side locking hole 15.
- the magnetic ring 5 is made of a magnetic material and is constructed as a single unit.
- the magnetic material that constitutes the magnetic ring 5 can be, for example, an iron-based alloy such as alloy steel for mechanical construction or stainless steel.
- the magnetic ring 5 is made up of only the ring side cylindrical portion 13, and is configured to be approximately cylindrical overall.
- the shape of the ring side cylindrical portion 13 can be any shape as long as it is approximately cylindrical overall; for example, the outer diameter and inner diameter can be constant along the axial direction, but at least one of the outer diameter and inner diameter can be configured with a stepped cylindrical surface.
- the ring side tubular portion 13 has a small diameter portion 16 on the other axial side portion (excluding the end portion on one axial side), and a large diameter portion 17 with a larger outer diameter than the small diameter portion 16 at the end portion on one axial side. That is, the ring side tubular portion 13 has a stepped cylindrical outer circumferential surface in which the outer circumferential surface of the small diameter portion 16 and the outer circumferential surface of the large diameter portion 17 are connected by a step surface 18 facing the other axial side. In contrast, the inner circumferential surface of the small diameter portion 16 and the inner circumferential surface of the large diameter portion 17 are located on the same cylindrical surface. Therefore, the radial thickness of the large diameter portion 17 is thicker than the radial thickness of the small diameter portion 16.
- the ring side cylindrical portion 13 has a notch 19 at one circumferential position on one axial end of the large diameter portion 17, which penetrates the large diameter portion 17 from the inner peripheral surface to the outer peripheral surface and opens to one axial end face of the large diameter portion 17.
- the notch 19 is positioned at a portion whose phase in the circumferential direction coincides with that of the connector accommodating portion 12 when the magnetostrictive torque sensor 1 is assembled.
- a cable extending from the detection portion 4 and/or a connector provided at the tip of the cable are positioned inside the notch 19.
- the ring side mating surface 14 is provided on the outer peripheral surface of the large diameter portion 17, more specifically, on the entire outer peripheral surface.
- the relationship between the axial length of the bobbin side fitting surface 8 and the axial length of the ring side fitting surface 14 is arbitrary, and these lengths can be the same or different.
- the axial length of the bobbin side fitting surface 8 and the axial length of the ring side fitting surface 14 are approximately the same.
- the axial length of the outer diameter side tubular portion 11 and the axial length of the large diameter portion 17 are approximately the same. Therefore, when the magnetostrictive torque sensor 1 is assembled, the axial position of the step surface 18 and the axial position of the end face on the other axial side of the outer diameter side tubular portion 11 are approximately the same. In other words, the step surface 18 and the end face on the other axial side of the outer diameter side tubular portion 11 are located on approximately the same plane.
- the ring side locking hole 15 is provided in any part of the magnetic ring 5.
- the ring side locking hole 15, in combination with the positioning member 6 and the bobbin side locking hole 9 of the bobbin 3, has the function of preventing relative displacement (creep), particularly relative displacement in the axial direction, between the bobbin 3 and the magnetic ring 5.
- the arrangement of the bobbin side locking hole 9 is not particularly limited, but is provided in a part that matches the bobbin side locking hole 9 when the magnetostrictive torque sensor 1 is assembled.
- the ring side locking hole 15 can be configured as a through hole or a bottomed hole in relation to the bobbin side locking hole 9, so long as it is possible to place (insert) the positioning member 6 inside the bobbin side locking hole 9 and inside the ring side locking hole 15.
- the opening shape of the ring side locking hole 15 can be set arbitrarily depending on the shape of the positioning member.
- the ring side locking hole 15 is provided in the large diameter portion 17.
- the ring side locking hole 15 opens into the ring side mating surface 14 provided on the outer circumferential surface of the large diameter portion 17.
- the ring side locking hole can be formed so as to penetrate the magnetic ring in the radial direction.
- the ring side locking hole 15 has a circular opening shape and is configured as a bottomed hole that opens only radially outward.
- the material constituting the positioning member 6 is not particularly limited as long as it can ensure sufficient bonding strength between the bobbin 3 and the magnetic ring 5, and metal materials such as iron-based alloys and light alloys, as well as synthetic resins, can be used.
- the structure of the positioning member 6 is not particularly limited as long as it can realize its function.
- the positioning member 6 can be configured with a cylindrical or cylindrical pin, as well as a segmented cylindrical spring pin with a linear or wavy slit at one circumferential location.
- the cross-sectional shape of the positioning member 6 is not limited to a circle, but can also be a non-circular shape such as a segmented circle or polygon. It is preferable that the opening shapes of the bobbin side locking hole 9 in the bobbin 3 and the ring side locking hole 15 in the magnetic ring 5 are determined according to the cross-sectional shape of the positioning member 6.
- the positioning member 6 can be constructed of a screw.
- one of the bobbin side locking hole 9 and the ring side locking hole 15 is a screw hole.
- the positioning member 6 can be constructed of a screw.
- the radially outer portion of the positioning member 6 is positioned (inserted) inside the bobbin side locking hole 9, and the radially inner portion of the positioning member 6 is positioned (inserted) inside the ring side locking hole 15.
- the radially outer end of the positioning member 6 does not protrude radially outward from the radially outer end of the bobbin side locking hole 9.
- the positioning member 6 is also made of a metal material such as an iron-based alloy or a light alloy.
- the combination of the bobbin side locking hole 9, the ring side locking hole 15, and the positioning member 6 serves to prevent relative displacement (creep), particularly relative displacement in the axial direction, between the bobbin 3 and the magnetic ring 5.
- the number of combinations of the bobbin side locking hole 9, the ring side locking hole 15, and the positioning member 6 can be set as desired depending on the application and installation location of the magnetostrictive torque sensor 1.
- the magnetostrictive torque sensor 1 can have one combination of the bobbin side locking hole 9, the ring side locking hole 15, and the positioning member 6. Alternatively, it can have multiple combinations of the bobbin side locking hole 9, the ring side locking hole 15, and the positioning member 6.
- the magnetostrictive torque sensor 1 in this example has only one positioning member 6.
- the magnetostrictive torque sensor 1 is prevented from rotating relative to the non-rotating member 20 by fitting the outer surface of the small diameter portion 16 constituting the ring side tube portion 13 of the magnetic ring 5 without any radial rattle into the fixed side fitting surface 31 provided on the inner surface of the non-rotating member 20 (see Figure 2), which does not rotate even when the housing or frame is in use, and by facing both circumferential side surfaces of the connector accommodating portion 12 to stopper surfaces provided on the non-rotating member 20.
- the magnetostrictive torque sensor 1 is positioned in the axial direction by abutting the fixed side step surface 32 facing one axial side of the non-rotating member 20 against the step surface 18 of the magnetic ring 5 and the end face on the other axial side of the outer diameter side tube portion 11, and by abutting a retaining member 33 such as a retaining ring engaged with the inner peripheral surface of the non-rotating member 20 against the side surface on one axial side of the connecting plate portion 10.
- the magnetostrictive torque sensor 1 is disposed around the rotating shaft 2 with the magnetostrictive torque sensor 1 supported and fixed to the non-rotating member 20.
- the magnetostrictive torque sensor 1 is supported and fixed to the non-rotating member 20 with the rotating shaft 2 inserted inside the bobbin side cylinder portion 7.
- the method of supporting and fixing the magnetostrictive torque sensor to a non-rotating member that does not rotate during use is not limited to the above-mentioned method, and any method can be used.
- a portion of the non-rotating member 20 can be abutted against or closely opposed to the peripheral portion of the radially outer opening of the bobbin side locking hole 9 on the outer circumferential surface of the bobbin 3 so as to cover the radially outer opening of the bobbin side locking hole 9 provided in the bobbin 3. This can reliably prevent the positioning member 6 from falling off the bobbin side locking hole 9 and the ring side locking hole 15.
- the magnetic permeability of the rotating shaft 2 changes due to the inverse magnetostriction effect.
- the voltage (induced electromotive force) of the detection coil that constitutes the detection unit 4 changes. Based on this change in voltage, the detection circuit determines the torque applied to the rotating shaft 2.
- the bobbin side mating surface 8 on the bobbin 3 and the ring side mating surface 14 on the magnetic ring 5 are mated without any rattle. This ensures good coaxiality between the bobbin 3 and the magnetic ring 5, and allows a stable magnetic circuit to be formed that passes through the rotating shaft 2, bobbin 3, and magnetic ring 5.
- the positioning member 6 is fitted between the bobbin side locking hole 9 in the bobbin 3 and the ring side locking hole 15 in the magnetic ring 5. Therefore, even if the bobbin 3 and/or the magnetic ring 5 expand or contract due to temperature changes, it is possible to reliably prevent relative displacement in the axial and circumferential directions between the bobbin 3 and the magnetic ring 5. In other words, with the magnetostrictive torque sensor 1 of this example, it is possible to sufficiently ensure the bonding strength between the bobbin 3 and the magnetic ring 5, specifically the bonding strength in the axial and circumferential directions.
- the bobbin side fitting surface 8 is provided on the inner peripheral surface of the bobbin 3, and the ring side fitting surface 14 is provided on the outer peripheral surface of the magnetic ring 5. That is, in the magnetostrictive torque sensor 1 of this example, the bobbin side fitting surface 8 facing the radially inward and the ring side fitting surface 14 facing the radially outward are fitted together without any rattle, and the positioning member 6 is inserted from the radially outward into the bobbin side locking hole 9 of the bobbin 3 and the ring side locking hole 15 of the magnetic ring 5.
- the bobbin side locking hole 9 can be formed in the outer diameter side cylinder portion 11 rather than the bobbin side cylinder portion 7, and the detection coil 28 of the detection unit 4 is arranged around it (in this example, the outer periphery), and the roundness of the bobbin side cylinder portion 7, whose peripheral surface (in this example, the inner peripheral surface) faces the peripheral surface (in this example, the outer peripheral surface) of the rotating shaft 2, is more appropriately ensured.
- the bobbin side mating surface can alternatively be provided on the outer peripheral surface of the bobbin, and the ring side mating surface can be provided on the inner peripheral surface of the magnetic ring. That is, the bobbin side mating surface facing radially outward and the ring side mating surface facing radially inward can be mated (preferably without rattle), and a positioning member can be inserted from the radially outer side into the bobbin side locking hole that is provided on the bobbin and opens into the bobbin side mating surface, and the ring side locking hole that is provided on the magnetic ring and penetrates the magnetic ring in the radial direction.
- both the bobbin side cylindrical portion of the bobbin and the ring side cylindrical portion of the magnetic ring are configured to be approximately cylindrical overall, and a protrusion (bobbin side protrusion or ring side protrusion) is provided that protrudes radially outward and/or inward from one axial end of at least one of the bobbin side cylindrical portion and the ring side cylindrical portion.
- a protrusion bobbin side protrusion or ring side protrusion
- the bobbin side fitting surface is formed by the outer circumferential surface of the one axial end of the bobbin side cylindrical portion or the outer circumferential surface of the bobbin side protrusion
- the ring side fitting surface is formed by the inner circumferential surface of the one axial end of the ring side cylindrical portion or the inner circumferential surface of the ring side protrusion.
- the magnetostrictive torque sensor 1a of this example differs from the structure of the first example in that the bobbin side locking hole 9 penetrates the bobbin 3 in the radial direction, and the positioning member 6a protrudes radially from the opening on the radial side opposite the magnetic ring 5 side of the openings on both radial sides of the bobbin side locking hole 9.
- the positioning member 6a is made of a metal material. Furthermore, the length of the positioning member 6a is longer than the sum of the radial depth of the bobbin side locking hole 9 in the bobbin 3 and the radial depth of the ring side locking hole 15 in the magnetic ring 5. Therefore, the radially outer end of the positioning member 6a protrudes radially outward from the radially outer opening of the bobbin side locking hole 9 in the bobbin 3.
- the radially outer portion of the positioning member 6a protruding from the radially outer opening of the bobbin side locking hole 9 is positioned inside the engagement recess 21 provided on the inner circumferential surface of the non-rotating member 20a.
- the radially outer portion of the positioning member 6a is then positioned between the circumferentially opposing side surfaces of the inner surface of the engagement recess 21.
- the radially outer portion of the positioning member 6a is closely opposed to the side surface provided on the non-rotating member 20a and facing in the circumferential direction. This prevents the magnetostrictive torque sensor 1a from rotating relative to the non-rotating member 20a.
- the magnetostrictive torque sensor 1a of this example makes it easy to miniaturize or omit the connector housing 12 provided on the bobbin 3.
- the radially outer portion of the positioning member 6a is positioned inside the engagement recess 21 provided on the inner circumferential surface of the non-rotating member 20a, thereby preventing the magnetostrictive torque sensor 1a from rotating relative to the non-rotating member 20a. This makes it easier to reduce the size of the connector housing 12 or to omit it.
- the ring side locking hole penetrates radially through the magnetic ring, the bobbin side mating surface facing radially outward is mated with the ring side mating surface facing radially inward, and the positioning member protrudes radially from the opening on the radial opposite side to the bobbin 3 side, of the openings on both radial sides of the ring side locking hole.
- FIG. 10 A third example of the embodiment of the present disclosure will be described with reference to FIGS. 10 and 11.
- FIG. 10 A third example of the embodiment of the present disclosure will be described with reference to FIGS. 10 and 11.
- the magnetostrictive torque sensor 1b of this example differs from the structures of the first and second examples in that it has multiple bobbin side locking holes, the ring side locking holes, and the positioning members.
- the magnetostrictive torque sensor 1b in this example has two combinations of a bobbin-side locking hole provided in the bobbin 3, a ring-side locking hole provided in the magnetic ring 5, and a positioning member 6a.
- each positioning member 6a protrudes radially outward from the radially outer opening of the bobbin-side locking hole provided in the bobbin 3.
- the radially outer portion of one positioning member 6a faces a stopper surface 22a provided on the non-rotating member 20b and facing one circumferential side
- the radially outer portion of the other positioning member 6a faces a stopper surface 22b provided on the non-rotating member 20b and facing the other circumferential side. This prevents the magnetostrictive torque sensor 1b from rotating relative to the non-rotating member 20b.
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Power Steering Mechanism (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP24778809.4A EP4692745A1 (en) | 2023-03-24 | 2024-02-16 | Magnetostrictive torque sensor |
| JP2025509904A JP7768447B2 (ja) | 2023-03-24 | 2024-02-16 | 磁歪式トルクセンサ |
| CN202480018091.3A CN120917296A (zh) | 2023-03-24 | 2024-02-16 | 磁致伸缩式转矩传感器 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023-047527 | 2023-03-24 | ||
| JP2023047527 | 2023-03-24 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024202664A1 true WO2024202664A1 (ja) | 2024-10-03 |
Family
ID=92904193
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2024/005424 Ceased WO2024202664A1 (ja) | 2023-03-24 | 2024-02-16 | 磁歪式トルクセンサ |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP4692745A1 (https=) |
| JP (1) | JP7768447B2 (https=) |
| CN (1) | CN120917296A (https=) |
| WO (1) | WO2024202664A1 (https=) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5526704A (en) * | 1994-11-01 | 1996-06-18 | Unisia Jecs Corporation | Structure of magnetostrictive torque sensor applicable to sensor for detecting torque applied to rotatable shaft |
| JPH09105686A (ja) * | 1995-08-09 | 1997-04-22 | Koyo Electron Ind Co Ltd | トルク検出装置 |
| JPH10339679A (ja) * | 1997-06-06 | 1998-12-22 | Toyota Autom Loom Works Ltd | トルクセンサ及びその固定子の回転規制部材 |
| JP2000019032A (ja) * | 1998-06-29 | 2000-01-21 | Suzuki Motor Corp | トルクセンサ装置 |
| JP2003121275A (ja) * | 2001-10-16 | 2003-04-23 | Hitachi Unisia Automotive Ltd | トルクセンサ |
| JP2008261852A (ja) * | 2007-04-03 | 2008-10-30 | Invendo Medical Gmbh | 圧力ゲージ |
| JP2020085814A (ja) | 2018-11-30 | 2020-06-04 | 日立金属株式会社 | 磁歪式トルクセンサの製造方法、及び磁歪式トルクセンサ |
| JP7040691B1 (ja) * | 2020-09-16 | 2022-03-23 | 日本精工株式会社 | トルク測定装置 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2548452Y2 (ja) * | 1991-12-26 | 1997-09-24 | 株式会社ユニシアジェックス | 磁歪式トルクセンサ |
| JPH085477A (ja) * | 1994-06-16 | 1996-01-12 | Unisia Jecs Corp | 磁歪式トルクセンサ |
| JP2020197496A (ja) | 2019-06-05 | 2020-12-10 | 日本精工株式会社 | トルクセンサ |
-
2024
- 2024-02-16 JP JP2025509904A patent/JP7768447B2/ja active Active
- 2024-02-16 CN CN202480018091.3A patent/CN120917296A/zh active Pending
- 2024-02-16 EP EP24778809.4A patent/EP4692745A1/en active Pending
- 2024-02-16 WO PCT/JP2024/005424 patent/WO2024202664A1/ja not_active Ceased
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5526704A (en) * | 1994-11-01 | 1996-06-18 | Unisia Jecs Corporation | Structure of magnetostrictive torque sensor applicable to sensor for detecting torque applied to rotatable shaft |
| JPH09105686A (ja) * | 1995-08-09 | 1997-04-22 | Koyo Electron Ind Co Ltd | トルク検出装置 |
| JPH10339679A (ja) * | 1997-06-06 | 1998-12-22 | Toyota Autom Loom Works Ltd | トルクセンサ及びその固定子の回転規制部材 |
| JP2000019032A (ja) * | 1998-06-29 | 2000-01-21 | Suzuki Motor Corp | トルクセンサ装置 |
| JP2003121275A (ja) * | 2001-10-16 | 2003-04-23 | Hitachi Unisia Automotive Ltd | トルクセンサ |
| JP2008261852A (ja) * | 2007-04-03 | 2008-10-30 | Invendo Medical Gmbh | 圧力ゲージ |
| JP2020085814A (ja) | 2018-11-30 | 2020-06-04 | 日立金属株式会社 | 磁歪式トルクセンサの製造方法、及び磁歪式トルクセンサ |
| JP7040691B1 (ja) * | 2020-09-16 | 2022-03-23 | 日本精工株式会社 | トルク測定装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4692745A1 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024202664A1 (https=) | 2024-10-03 |
| CN120917296A (zh) | 2025-11-07 |
| JP7768447B2 (ja) | 2025-11-12 |
| EP4692745A1 (en) | 2026-02-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10594198B2 (en) | Stator structure and resolver | |
| US20040021393A1 (en) | Brushless motor | |
| JP4687871B2 (ja) | アキシャルギャップ型電動機 | |
| US10641322B2 (en) | Bearing assembly unit and motor | |
| US6856065B2 (en) | Electric rotary machine having positioning ring for securing salient poles in place | |
| US6414482B1 (en) | Non-contact type rotational angle sensor and sensor core used in the sensor | |
| JPH10339679A (ja) | トルクセンサ及びその固定子の回転規制部材 | |
| US11799349B2 (en) | Motor | |
| JPH11344394A (ja) | トルクセンサ | |
| JPH0678833U (ja) | 磁歪式トルクセンサ | |
| JP6882112B2 (ja) | センサマグネットおよびモータ | |
| KR102809327B1 (ko) | 모터 및 스테이터 조립체 | |
| JP7768447B2 (ja) | 磁歪式トルクセンサ | |
| JP5932141B2 (ja) | 回転機械の回転子 | |
| US20160087515A1 (en) | Linear-rotary actuator | |
| CN107306514B (zh) | 旋转电机 | |
| JP3857548B2 (ja) | 磁歪式トルクセンサー | |
| JP2001133212A (ja) | 非接触式回転角センサ及びセンサコア | |
| WO2022085782A1 (ja) | モータ | |
| KR102504095B1 (ko) | 모터용 샤프트 조립체 및 이를 포함하는 모터 | |
| JP2678843B2 (ja) | 磁歪式トルクセンサ | |
| JP2020085178A (ja) | 軸受組立体、モータ、およびモータの製造方法 | |
| WO2025063111A1 (ja) | 磁歪式トルクセンサ | |
| JP2005328647A (ja) | Pm型ステッピングモータ | |
| JP2001141412A (ja) | 非接触式回転角センサ及びセンサコア |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 24778809 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025509904 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025509904 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202480018091.3 Country of ref document: CN |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024778809 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 202480018091.3 Country of ref document: CN |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| ENP | Entry into the national phase |
Ref document number: 2024778809 Country of ref document: EP Effective date: 20251024 |
|
| WWP | Wipo information: published in national office |
Ref document number: 2024778809 Country of ref document: EP |