WO2023100274A1 - 回転子および磁気波動歯車装置 - Google Patents
回転子および磁気波動歯車装置 Download PDFInfo
- Publication number
- WO2023100274A1 WO2023100274A1 PCT/JP2021/044018 JP2021044018W WO2023100274A1 WO 2023100274 A1 WO2023100274 A1 WO 2023100274A1 JP 2021044018 W JP2021044018 W JP 2021044018W WO 2023100274 A1 WO2023100274 A1 WO 2023100274A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rotor
- magnetic
- stator
- magnet
- base
- Prior art date
Links
- 230000002093 peripheral effect Effects 0.000 claims abstract description 12
- 229910000831 Steel Inorganic materials 0.000 claims description 7
- 239000000696 magnetic material Substances 0.000 claims description 7
- 239000010959 steel Substances 0.000 claims description 7
- 238000004804 winding Methods 0.000 claims description 4
- 239000000126 substance Substances 0.000 abstract 1
- 230000004907 flux Effects 0.000 description 4
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000003780 insertion Methods 0.000 description 2
- 230000037431 insertion Effects 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 238000010248 power generation Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229910000640 Fe alloy Inorganic materials 0.000 description 1
- 229910000990 Ni alloy Inorganic materials 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000009347 mechanical transmission Effects 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
Images

Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
- H02K1/272—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis
- H02K1/274—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets
- H02K1/2753—Inner rotors the magnetisation axis of the magnets being perpendicular to the rotor axis the rotor consisting of two or more circumferentially positioned magnets the rotor consisting of magnets or groups of magnets arranged with alternating polarity
- H02K1/278—Surface mounted magnets; Inset magnets
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Definitions
- This application relates to rotors and magnetic wave gear devices.
- a magnetic wave gear device that integrates a magnetic reduction gear and a rotating machine is known as a generator for a wind power generator.
- a magnetic wave gear device is composed of a low-speed rotor, a high-speed rotor provided coaxially with the low-speed rotor, and a stator having stator windings and permanent magnets.
- a magnetic wave gear device can change the rotation speed of a rotor in a non-contact manner without using a mechanical transmission that causes mechanical wear. Therefore, in the magnetic wave gear device, the load of maintenance against mechanical wear is reduced. Further, when the magnetic wave gear device is used as a generator for a wind power generator, a single device can perform both speed change and power generation, so that the power generation system can be made smaller and space-saving.
- a magnetic wave gear in which a stator having a plurality of permanent magnets, a high-speed rotor having a plurality of rotor magnets, and a low-speed rotor having a plurality of magnet pieces are concentrically arranged.
- a device has been disclosed (see, for example, Patent Document 1).
- a high-speed rotor of such a magnetic wave gear device a rotor in which a plurality of magnet modules, in which rotor magnets are fixed to a base, are arranged in the circumferential direction can be used.
- a rotor a rotor in which the base of the magnet module is made of a magnetic material is disclosed (see, for example, Patent Document 2).
- the magnetic resistance between the magnetic poles is large because the boundaries between the magnet modules are the boundaries between the adjacent magnetic poles. Therefore, even if a conventional rotor is applied to a magnetic wave gear device, there is a problem that the output is low because the magnetic resistance between the magnetic poles of the rotor is large.
- the present application was made to solve the above-mentioned problems, and aims to provide a rotor with small magnetic resistance between magnetic poles.
- the rotor of the present application is a rotor in which magnet modules are arranged in an annular shape around the rotation axis.
- the magnet module has a base made of a magnetic material, and two rotor magnets with different polarities arranged on the outer peripheral surface of the base with a gap in the rotation direction of the rotating shaft. , the facing rotor magnets of two rotationally adjacent magnet modules have the same pole and are in close contact with each other.
- the opposing rotor magnets of two magnet modules adjacent in the rotation direction have the same poles and are in close contact with each other, so the magnetic resistance between the magnetic poles can be reduced.
- FIG. 1 is a front view of a magnetic wave gear device according to Embodiment 1;
- FIG. 1 is a perspective view of a magnet module according to Embodiment 1.
- FIG. 1 is a cross-sectional view of a high-speed rotor according to Embodiment 1;
- FIG. 1 is a perspective view of a magnetic wave gear device according to Embodiment 1.
- FIG. 1 is a front view of a magnetic wave gear device according to Embodiment 1;
- FIG. 1 is a perspective view of a magnet module according to Embodiment 1.
- FIG. 1 is a cross-sectional view of a high-speed rotor according to Embodiment 1;
- FIG. 1 is a perspective view of a magnetic wave gear device according to Embodiment 1.
- Embodiment 1. 1 is a front view of a magnetic wave gear device according to Embodiment 1.
- FIG. A magnetic wave gearing 1 of this embodiment has a cylindrical frame 2 , a stator 3 , a low speed rotor 4 and a high speed rotor 5 .
- the stator 3 includes a stator core 31 having a plurality of slots in the circumferential direction, stator windings 32 and stator magnets 33 arranged in the slots.
- the stator 3 is fixed to the frame 2 on the inner peripheral side of the frame 2 .
- the low-speed rotor 4 has a cylindrical low-speed rotor core arranged on the inner peripheral side of the stator 3 with a gap therebetween.
- the high-speed rotor 5 is concentric with the rotating shaft 41 of the low-speed rotor 4 and is arranged on the inner peripheral side of the low-speed rotor core with a gap therebetween.
- the high-speed rotor 5 includes a cylindrical high-speed rotor core 51 and magnet modules 52 arranged side by side in the circumferential direction.
- the low-speed rotor 4 includes a low-speed rotor end plate 42 that fastens the low-speed rotor core and the rotating shaft 41 outside the high-speed rotor 5 in the direction of the rotating shaft 41 .
- the low-speed rotor end plate 42 of this embodiment is composed of a plurality of spokes 42a. Openings are provided between the plurality of spokes 42a.
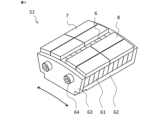
- FIG. 2 is a perspective view of the magnet module according to this embodiment.
- the direction indicated by the double-ended arrow is the rotation direction of the rotating shaft 41 of the magnetic wave gear device 1 shown in FIG.
- the magnet module 52 has a base 6 and two rotor magnets 7 and 8 having different polarities and arranged on the outer peripheral surface of the base 6 with a gap in the rotational direction.
- the base 6 has a plurality of electromagnetic steel sheets 61 laminated in the axial direction of the rotating shaft.
- a plurality of electromagnetic steel plates 61 are fixed by a bottom plate 62 having an L-shaped cross section, an end plate 63 and a fixing bolt 64 .
- the two rotor magnets 7, 8 have different poles. For example, if the outer circumference of the rotor magnet 7 is the north pole, the outer circumference of the rotor magnet 8 is the south pole. As shown in FIG. 2, the two rotor magnets 7 and 8 are each composed of four magnet pieces divided into two in the rotational direction and the axial direction. These magnet pieces are firmly fixed to the base 6 with, for example, an adhesive.
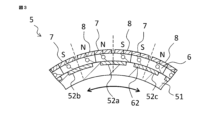
- FIG. 3 is a cross-sectional view of the high-speed rotor according to this embodiment.
- the magnet modules 52 are annularly arranged in close contact with the outer peripheral surface of the cylindrical high-speed rotor core 51 .
- FIG. 3 shows a part of the cross-section of the high-speed rotor 5 with the magnet modules 52 arranged in the direction of rotation of the rotary shaft 41 .
- the direction indicated by the double-ended arrow is the rotation direction of the rotating shaft 41 of the magnetic wave gear device 1 shown in FIG.
- the facing rotor magnets of the magnet modules 52 that are rotationally adjacent have the same pole and are in close contact with each other.
- one magnetic pole is configured to straddle two magnet modules 52 .
- dashed lines indicate boundaries of magnetic poles.
- the left N-pole rotor magnet 7 of the centrally arranged magnet module 52a and the right N-pole rotor magnet 8 of the left-hand magnet module 52b constitute one N-pole magnetic pole.
- the rotor magnet 8 of the south pole on the right side of the magnet module 52a arranged in the center and the rotor magnet 7 of the left south pole of the magnet module 52c arranged on the right side form one magnetic pole of the south pole. It is configured.
- the boundary of the magnetic poles is the central portion of the magnet module. Therefore, since the base of the magnet module serves as a magnetic path between the magnetic poles, the magnetic resistance between the magnetic poles is reduced. As a result, it is possible to suppress a decrease in the output of a magnetic wave gear device using this high-speed rotor.
- the base of the magnet module is made of magnetic steel sheets laminated in the axial direction, the current path in the axial direction is cut off, making it difficult for eddy currents to flow. Therefore, in this magnet module, eddy current loss caused by harmonic magnetic flux can be reduced.
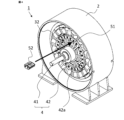
- FIG. 4 is a perspective view of the magnetic wave gear device according to this embodiment.
- the low speed rotor end plate 42 is constructed with a plurality of spokes 42a. Openings are provided between the plurality of spokes 42a.
- the magnet module 52 can also be passed through this opening and arranged on the outer peripheral surface of the high-speed rotor core 51 .
- the rotor magnets 7 and 8 are not incorporated in the high-speed rotor core 51 when the high-speed rotor core 51 is inserted into the inner peripheral side of the stator 3 .
- the gap between the high-speed rotor 5 and the stator 3 is widened in order to improve the efficiency of the assembly work. No need. If the gap between the high-speed rotor 5 and the stator 3 is widened, the output of the magnetic wave gear device will decrease. For this reason, in the magnetic wave gear device according to the present embodiment, it is possible to suppress the decrease in output caused by the widening of the gap between the high-speed rotor and the stator.
- the base of the magnet module is composed of laminated electromagnetic steel plates. If eddy current losses due to harmonic flux are not a concern, the base of the magnet module may be an integral magnetic body.
- the two rotor magnets 7 and 8 are composed of four magnet pieces that are divided into two in the rotational direction and the axial direction. If the rotor magnets 7 and 8 are divided into magnet pieces, the eddy current caused by the harmonic magnetic flux is less likely to flow, and the eddy current loss in the rotor magnets 7 and 8 can be reduced. However, if the eddy current loss in the rotor magnets is not a problem, each of the rotor magnets 7 and 8 may be composed of one magnet.
- Embodiment 2 a base in which a plurality of electromagnetic steel sheets are laminated is used as the base of the magnet module.
- a powdery magnetic material is used as the base of the magnet module.
- Other configurations of the magnet module are the same as those of the magnet module of the first embodiment.
- the configurations of the high-speed rotor and the magnetic wave gear device are the same as those of the first embodiment.
- powder materials such as iron and alloys of iron and nickel can be used.
- the boundary between the magnetic poles is the central portion of the magnet module. Therefore, since the base of the magnet module serves as a magnetic path between the magnetic poles, the magnetic resistance between the magnetic poles is reduced, and the reduction in the output of the magnetic wave gear device using this high-speed rotor can be suppressed.
- the base of the magnet module is made of a powdery magnetic material, the current path is cut off, making it difficult for eddy currents to flow, as in the first embodiment. Therefore, in this magnet module, eddy current loss caused by harmonic magnetic flux can be reduced.
- 1 magnetic wave gear device 2 frame, 3 stator, 4 low speed rotor, 5 high speed rotor, 6 base, 7, 8 rotor magnet, 31 stator core, 32 stator winding, 33 stator magnet, 41 rotary shaft, 42 low-speed rotor end plate, 42a spokes, 51 high-speed rotor core, 52, 52a, 52b, 52c magnet module, 61 electromagnetic steel plate, 62 bottom plate, 63 end plate, 64 fixing bolt.
Abstract
磁極間の磁気抵抗が小さい回転子を提供する。 回転軸を中心に磁石モジュール(52a、52b、52c)が円環状に配置された回転子(5)であって、磁石モジュールは、磁性体で構成された基台(6)と、基台の外周面に回転軸の回転方向に隙間を介して配置された互いに極が異なる2つの回転子磁石(7、8)とを有しており、回転方向に隣接する2つの磁石モジュール同士の対向する回転子磁石は、互いに同じ極でありかつ密接している。
Description
本願は、回転子および磁気波動歯車装置に関する。
風力発電装置の発電機として磁気減速機と回転機とを一体化させた磁気波動歯車装置が知られている。磁気波動歯車装置は、低速回転子と、低速回転子と同軸状に設けられた高速回転子と、固定子巻線および永久磁石を有する固定子とで構成されている。磁気波動歯車装置は、機械的な摩耗が発生する機械式変速機を用いることなく、非接触で回転子の回転速度を変えることができる。そのため、磁気波動歯車装置においては、機械的な摩耗に対するメンテナンスの負荷が軽減される。また、磁気波動歯車装置を風力発電装置の発電機として用いる場合、1つの装置で変速と発電とが可能となるので、発電システムの小型化、省スペース化が実現できる。
従来の磁気波動歯車装置として、複数の永久磁石を有する固定子と、複数の回転子磁石を有する高速回転子と、複数の磁石片を有する低速回転子とが同心状に配置された磁気波動歯車装置が開示されている(例えば、特許文献1参照)。このような磁気波動歯車装置の高速回転子として、回転子磁石を基台に固定した磁石モジュールを周方向に複数並べた回転子を用いることができる。このような回転子として、磁石モジュールの基台を磁性体で構成した回転子が開示されている(例えば、特許文献2参照)。
しかしながら、従来の回転子においては、磁石モジュール同士の境界が隣り合う磁極の境界となるため磁極間の磁気抵抗が大きい。そのため、従来の回転子を磁気波動歯車装置に適用しても、回転子の磁極間の磁気抵抗が大きいために、出力が低いという問題があった。
本願は、上述のような課題を解決するためになされたもので、磁極間の磁気抵抗が小さい回転子を提供することを目的とする。
本願の回転子は、回転軸を中心に磁石モジュールが円環状に配置された回転子である。そして、磁石モジュールは、磁性体で構成された基台と、基台の外周面に回転軸の回転方向に隙間を介して配置された互いに極が異なる2つの回転子磁石とを有しており、回転方向に隣接する2つの磁石モジュール同士の対向する回転子磁石は互いに同じ極でありかつ密接している。
本願の回転子においては、回転方向に隣接する2つの磁石モジュール同士の対向する回転子磁石は互いに同じ極でありかつ密接しているので、磁極間の磁気抵抗を小さくすることができる。
以下、本願を実施するための実施の形態に係る回転子および磁気波動歯車装置について、図面を参照して詳細に説明する。なお、各図において同一符号は同一もしくは相当部分を示している。
実施の形態1.
図1は、実施の形態1に係る磁気波動歯車装置の正面図である。本実施の形態の磁気波動歯車装置1は、円筒形状のフレーム2と、固定子3と、低速回転子4と、高速回転子5とを有している。固定子3は、周方向に複数のスロットを備えた固定子鉄心31、スロット内に配置された固定子巻線32および固定子磁石33を備えている。固定子3は、フレーム2の内周側でフレーム2に固定されている。低速回転子4は、固定子3の内周側に間隙を介して配置された円筒形状の低速回転子鉄心を有している。高速回転子5は、低速回転子4の回転軸41と同心で、低速回転子鉄心の内周側に間隙を介して配置されている。高速回転子5は、円筒形状の高速回転子鉄心51と周方向に並んで配置された磁石モジュール52とを備えている。低速回転子4は、高速回転子5より回転軸41方向の外側で低速回転子鉄心と回転軸41とを締結する低速回転子端板42を備えている。図1に示すように、本実施の形態の低速回転子端板42は、複数のスポーク42aで構成されている。複数のスポーク42aの間は開口部となっている。
図1は、実施の形態1に係る磁気波動歯車装置の正面図である。本実施の形態の磁気波動歯車装置1は、円筒形状のフレーム2と、固定子3と、低速回転子4と、高速回転子5とを有している。固定子3は、周方向に複数のスロットを備えた固定子鉄心31、スロット内に配置された固定子巻線32および固定子磁石33を備えている。固定子3は、フレーム2の内周側でフレーム2に固定されている。低速回転子4は、固定子3の内周側に間隙を介して配置された円筒形状の低速回転子鉄心を有している。高速回転子5は、低速回転子4の回転軸41と同心で、低速回転子鉄心の内周側に間隙を介して配置されている。高速回転子5は、円筒形状の高速回転子鉄心51と周方向に並んで配置された磁石モジュール52とを備えている。低速回転子4は、高速回転子5より回転軸41方向の外側で低速回転子鉄心と回転軸41とを締結する低速回転子端板42を備えている。図1に示すように、本実施の形態の低速回転子端板42は、複数のスポーク42aで構成されている。複数のスポーク42aの間は開口部となっている。
図2は、本実施の形態に係る磁石モジュールの斜視図である。図2において、両端矢印で示す方向は、図1に示す磁気波動歯車装置1の回転軸41の回転方向である。磁石モジュール52は、基台6と、この基台6の外周面に回転方向に隙間を介して配置された互いに極が異なる2つの回転子磁石7、8とを有している。基台6は、回転軸の軸方向に複数の電磁鋼板61が積層されている。複数の電磁鋼板61は、断面がL字型の底板62と端板63と固定ボルト64とで固定されている。
2つの回転子磁石7、8は互いに極が異なっている。例えば、回転子磁石7の外周側がN極であれば、回転子磁石8の外周側はS極である。図2に示すように、2つの回転子磁石7、8は、回転方向および軸方向にそれぞれ2分割された4つの磁石片で構成されている。これらの磁石片は、例えば接着剤などで基台6に強固に固定されている。
図3は、本実施の形態に係る高速回転子の断面図である。本実施の形態に係る高速回転子5は、円筒形状の高速回転子鉄心51の外周面に磁石モジュール52が円環状に密接して配置されている。図3は、回転軸41の回転方向に磁石モジュール52が配置された高速回転子5の断面の一部を示している。図3において、両端矢印で示す方向は、図1に示す磁気波動歯車装置1の回転軸41の回転方向である。図3に示すように、回転方向に隣接する磁石モジュール52同士の対向する回転子磁石は互いに同じ極でありかつ密接している。そのため、1つの磁極は、2つの磁石モジュール52を跨ぐ形で構成される。図3において、破線は磁極の境界を示している。例えば、中央に配置された磁石モジュール52aの左側のN極の回転子磁石7と、左側に配置された磁石モジュール52bの右側のN極の回転子磁石8とで1つのN極の磁極が構成されている。同様に、中央に配置された磁石モジュール52aの右側のS極の回転子磁石8と、右側に配置された磁石モジュール52cの左側のS極の回転子磁石7とで1つのS極の磁極が構成されている。
このように構成された高速回転子5においては、磁極の境界が磁石モジュールの中央部になる。そのため、磁石モジュールの基台が磁極間の磁路となるので、磁極間の磁気抵抗が小さくなる。その結果、この高速回転子を用いた磁気波動歯車装置の出力低下を抑制することができる。
また、磁石モジュールの基台が軸方向に積層された電磁鋼板で構成されているため軸方向の電流経路が分断されて渦電流が流れにくくなる。そのため、この磁石モジュールにおいては、高調波磁束に起因する渦電流損を低減することができる。
図4は、本実施の形態に係る磁気波動歯車装置の斜視図である。図4に示すように、低速回転子端板42は、複数のスポーク42aで構成されている。複数のスポーク42aの間は開口部となっている。図4において矢印で示すように、磁石モジュール52をこの開口部を通過させて高速回転子鉄心51の外周面に配置することもできる。このようにして高速回転子を組み立てると、高速回転子鉄心51を固定子3の内周側に挿入するときに回転子磁石7、8は高速回転子鉄心51に組み込まれていない。そのため、高速回転子鉄心51を挿入するときに固定子磁石33と回転子磁石7、8との間の磁気吸引力は発生しない。その結果、高速回転子鉄心51を固定子3に挿入するときに挿入方向と直角な方向の力は作用しないので、精度よく高速回転子鉄心51を固定子3に挿入することができる。
また、高速回転子5を固定子3に挿入するときに挿入方向と直角な方向の力は作用しないので、組み立て作業の効率を向上させるために高速回転子5と固定子3との間隙を広げる必要もない。仮に高速回転子5と固定子3との間隙を広げた場合、磁気波動歯車装置の出力が低下する。このことから、本実施の形態に係る磁気波動歯車装置においては、高速回転子と固定子との間隙が広くなることに起因する出力の低下も抑制することができる。
なお、本実施の形態においては、磁石モジュールの基台が積層された電磁鋼板で構成されている。高調波磁束に起因する渦電流損が問題にならない場合には、磁石モジュールの基台は一体化された磁性体であってもよい。
また、本実施の形態においては、2つの回転子磁石7、8は、回転方向および軸方向にそれぞれ2分割された4つの磁石片で構成されている。回転子磁石7、8が磁石片に分割されていると高調波磁束に起因する渦電流が流れにくくなり、回転子磁石7、8における渦電流損を低減することができる。ただし、回転子磁石における渦電流損が問題にならない場合には、回転子磁石7、8はそれぞれ1つの磁石で構成されていてもよい。
実施の形態2.
実施の形態1においては、磁石モジュールの基台として複数の電磁鋼板が積層された基台を用いている。実施の形態2においては、磁石モジュールの基台として粉末状の磁性体を用いたものである。それ以外の磁石モジュールの構成は、実施の形態1の磁石モジュールの構成と同様である。また、高速回転子および磁気波動歯車装置の構成も実施の形態1と同様である。
実施の形態1においては、磁石モジュールの基台として複数の電磁鋼板が積層された基台を用いている。実施の形態2においては、磁石モジュールの基台として粉末状の磁性体を用いたものである。それ以外の磁石モジュールの構成は、実施の形態1の磁石モジュールの構成と同様である。また、高速回転子および磁気波動歯車装置の構成も実施の形態1と同様である。
粉末状の磁性体としては、例えば鉄、鉄とニッケルとの合金などの粉末材料を用いることができる。
このように構成された磁石モジュールを用いた高速回転子においては、磁極の境界が磁石モジュールの中央部になる。そのため、磁石モジュールの基台が磁極間の磁路となるので、磁極間の磁気抵抗が小さくなり、この高速回転子を用いた磁気波動歯車装置の出力低下を抑制することができる。
また、磁石モジュールの基台が粉末状の磁性体で構成されているので、実施の形態1と同様に、電流経路が分断されて渦電流が流れにくくなる。そのため、この磁石モジュールにおいては、高調波磁束に起因する渦電流損を低減することができる。
本願は、様々な例示的な実施の形態が記載されているが、1つまたは複数の実施の形態に記載された様々な特徴、態様、および機能は特定の実施の形態の適用に限られるのではなく、単独で、または様々な組み合わせで実施の形態に適用可能である。
したがって、例示されていない無数の変形例が、本願に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
したがって、例示されていない無数の変形例が、本願に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合、さらには、少なくとも1つの構成要素を抽出し、他の実施の形態の構成要素と組み合わせる場合が含まれるものとする。
1 磁気波動歯車装置、2 フレーム、3 固定子、4 低速回転子、5 高速回転子、6 基台、7、8 回転子磁石、31 固定子鉄心、32 固定子巻線、33 固定子磁石、41 回転軸、42 低速回転子端板、42a スポーク、51 高速回転子鉄心、52、52a、52b、52c 磁石モジュール、61 電磁鋼板、62 底板、63 端板、64 固定ボルト。
Claims (4)
- 回転軸を中心に磁石モジュールが円環状に配置された回転子であって、
前記磁石モジュールは、磁性体で構成された基台と、前記基台の外周面に前記回転軸の回転方向に隙間を介して配置された互いに極が異なる2つの回転子磁石とを有しており、回転方向に隣接する2つの前記磁石モジュール同士の対向する前記回転子磁石は、互いに同じ極でありかつ密接していることを特徴とする回転子。 - 前記基台は、前記回転軸の軸方向に積層された電磁鋼板で構成されていることを特徴とする請求項1に記載の回転子。
- 前記基台は、粉末状の磁性体で構成されていることを特徴とする請求項1に記載の回転子。
- 周方向に複数のスロットを備えた固定子鉄心、前記スロット内に配置された固定子巻線および固定子磁石を有する固定子と、
前記固定子の内周側に間隙を介して配置された第1回転子と、
前記第1回転子の回転軸と同心で、前記第1回転子の内周側に間隙を介して配置された第2回転子とを有する磁気波動歯車装置であって、
前記第2回転子が請求項1から3のいずれか1項に記載の回転子で構成されていることを特徴とする磁気波動歯車装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2023564326A JPWO2023100274A1 (ja) | 2021-12-01 | 2021-12-01 | |
| PCT/JP2021/044018 WO2023100274A1 (ja) | 2021-12-01 | 2021-12-01 | 回転子および磁気波動歯車装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/044018 WO2023100274A1 (ja) | 2021-12-01 | 2021-12-01 | 回転子および磁気波動歯車装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023100274A1 true WO2023100274A1 (ja) | 2023-06-08 |
Family
ID=86611725
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/044018 WO2023100274A1 (ja) | 2021-12-01 | 2021-12-01 | 回転子および磁気波動歯車装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2023100274A1 (ja) |
| WO (1) | WO2023100274A1 (ja) |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08505037A (ja) * | 1992-10-09 | 1996-05-28 | ヒル,ヴォルフガンク | 軟磁性部片および硬磁性部片から構成される永久磁石式電気機械 |
| JP2013106499A (ja) * | 2011-11-16 | 2013-05-30 | Aisin Seiki Co Ltd | 回転電機および回転電機のロータ |
| WO2013111335A1 (ja) * | 2012-01-27 | 2013-08-01 | 株式会社安川電機 | 回転電機 |
| JP2016135014A (ja) | 2015-01-20 | 2016-07-25 | 株式会社Ihi | 磁気波動歯車装置 |
| JP2019030063A (ja) | 2017-07-26 | 2019-02-21 | Tdk株式会社 | 磁石構造体及びモータ |
-
2021
- 2021-12-01 JP JP2023564326A patent/JPWO2023100274A1/ja active Pending
- 2021-12-01 WO PCT/JP2021/044018 patent/WO2023100274A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08505037A (ja) * | 1992-10-09 | 1996-05-28 | ヒル,ヴォルフガンク | 軟磁性部片および硬磁性部片から構成される永久磁石式電気機械 |
| JP2013106499A (ja) * | 2011-11-16 | 2013-05-30 | Aisin Seiki Co Ltd | 回転電機および回転電機のロータ |
| WO2013111335A1 (ja) * | 2012-01-27 | 2013-08-01 | 株式会社安川電機 | 回転電機 |
| JP2016135014A (ja) | 2015-01-20 | 2016-07-25 | 株式会社Ihi | 磁気波動歯車装置 |
| JP2019030063A (ja) | 2017-07-26 | 2019-02-21 | Tdk株式会社 | 磁石構造体及びモータ |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2023100274A1 (ja) | 2023-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2200154B1 (en) | Axial gap motor | |
| US9071118B2 (en) | Axial motor | |
| CN101779366B (zh) | 轴向间隙型电动机 | |
| EP2226924B1 (en) | Motor and rotor for dynamo-electric machine | |
| AU2011303910B2 (en) | Rotor for modulated pole machine | |
| CN101663806B (zh) | 轴向间隙型电机 | |
| JP5210150B2 (ja) | 永久磁石式回転電機、エレベータ装置、及び永久磁石式回転電機の製造方法 | |
| JP2010178472A (ja) | アキシャルギャップ型モータ | |
| US20050077802A1 (en) | Magnetic circuit structure for rotary electric machine | |
| CN108696019B (zh) | 用于开关型磁阻电机的转子的端板 | |
| JPWO2020194390A1 (ja) | 回転電機 | |
| JP2013059178A (ja) | 磁気ギア | |
| WO2023100274A1 (ja) | 回転子および磁気波動歯車装置 | |
| JP2006304532A (ja) | アキシャルギャップ型回転電機のロータ構造 | |
| JP7262623B2 (ja) | 固定子およびこれを用いた回転電機 | |
| JP2016178816A (ja) | ロータ、電動モータ | |
| JP5292953B2 (ja) | アキシャルギャップ型モータ | |
| JP5731055B1 (ja) | アウターロータ型発電機 | |
| WO2023199460A1 (ja) | 回転装置 | |
| WO2023012855A1 (ja) | 磁気波動歯車装置 | |
| WO2015068846A1 (ja) | 回転電機 | |
| JP5017045B2 (ja) | アキシャルギャップ型モータ | |
| JP5280788B2 (ja) | アキシャルギャップ型モータ | |
| CN112970178A (zh) | 磁齿轮电机 | |
| JP6804699B1 (ja) | 固定子およびこれを用いた回転電機 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21966358 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023564326 Country of ref document: JP |