WO2022201455A1 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- WO2022201455A1 WO2022201455A1 PCT/JP2021/012652 JP2021012652W WO2022201455A1 WO 2022201455 A1 WO2022201455 A1 WO 2022201455A1 JP 2021012652 W JP2021012652 W JP 2021012652W WO 2022201455 A1 WO2022201455 A1 WO 2022201455A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- target
- modulated signal
- signal
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
- G01S7/354—Extracting wanted echo-signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/343—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using sawtooth modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/347—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using more than one modulation frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/023—Interference mitigation, e.g. reducing or avoiding non-intentional interference with other HF-transmitters, base station transmitters for mobile communication or other radar systems, e.g. using electro-magnetic interference [EMI] reduction techniques
- G01S7/0232—Avoidance by frequency multiplex
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/023—Interference mitigation, e.g. reducing or avoiding non-intentional interference with other HF-transmitters, base station transmitters for mobile communication or other radar systems, e.g. using electro-magnetic interference [EMI] reduction techniques
- G01S7/0235—Avoidance by time multiplex
Definitions
- the present invention relates to a radar device that calculates the distance to a target and the relative speed to the target.
- a radar apparatus comprises a radar signal output unit that repeatedly outputs a frequency modulated signal, a transmitter/receiver that transmits the frequency modulated signal toward a target and receives a reflected wave from the target, and a frequency modulated signal.
- a beat signal generator that generates a beat signal having a frequency difference between the frequency and the frequency of the reflected wave and converts it into digital data;
- a signal processing unit that calculates the Doppler frequency corresponding to the relative speed with the target and detects the distance and relative speed of the target, and the radar signal output unit changes the frequency with a preset first chirp slope.
- FIG. 1 shows a configuration diagram of a radar device according to this embodiment.
- the radar device 1 is composed of a radar signal output section 11 , a transmission/reception section 15 , a beat signal generation section 18 and a signal processing section 22 .
- the distributor 14 distributes each radar signal repeatedly output from the signal source 13 into two.
- the distributor 14 outputs one of the distributed radar signals to the transmitting antenna 16 and outputs the other distributed radar signal to the beat signal generator 18 as a local oscillation signal.
- the radar signal output unit 11 intermittently and repeatedly outputs the frequency-modulated signal whose frequency changes over time to the transmission/reception unit 15 as a radar signal.
- the transmitting/receiving unit 15 includes a transmitting antenna 16 and a receiving antenna 17, transmits the radar signal repeatedly output from the radar signal output unit 11 toward the target, and reflects each radar signal reflected by the target. Receive as waves.
- the transmission/reception unit 15 in which the receiving antenna 17 is directly connected to the frequency mixing unit 19 has been described, but this is only an example, and an amplifier is connected between the receiving antenna 17 and the frequency mixing unit 19.
- the amplifier may amplify the received signal output from the receiving antenna 17 and output the amplified received signal to the frequency mixing section 19 .
- FIG. 3 is a hardware configuration diagram of a computer when the signal processing unit 22 is realized by software, firmware, or the like.
- the signal source 13 repeatedly outputs the radar signal Tx(k) to the distributor 14 according to the output timing indicated by the control signal output from the output controller 12 .
- the distributor 14 divides the radar signal Tx(k) into two each time it receives the radar signal Tx(k) from the signal source 13 .
- the distributor 14 outputs one of the distributed radar signals Tx(k) to the transmitting antenna 16, and outputs the other distributed radar signal Tx(k) to the frequency mixer 19 as the local oscillation signal Lo(k). do.
- step ST ⁇ b>12 the second spectrum calculator 52 repeatedly acquires K first frequency spectra from the first spectrum calculator 51 .
- the second spectrum calculator 52 calculates a second frequency spectrum by Fourier transforming the K first frequency spectra in the Doppler direction every time K first frequency spectra are obtained.
- the distance/velocity calculation processing unit 53 compares a plurality of spectrum values included in the two-dimensional spectrum including the first frequency spectrum and the second frequency spectrum with the threshold value Th for peak detection. , a spectral value larger than the threshold value Th among a plurality of spectral values is detected as a peak value.
- the threshold value Th for peak detection may be stored in the internal memory of the distance/velocity calculation processing unit 53 or may be given from the outside of the radar device 1 .
- the peak value detected in step ST13 is the location indicated by the distance/velocity calculation result (ST13) in FIGS.
- ST13 distance/velocity calculation result
- FIG. 6 since there is no electromagnetic noise, only the peak values of the target are indicated by circles, and in FIG. 7, not only the peak values of the target but also the peak values of the electromagnetic noise are indicated by triangles. ing.
- the beat frequency and the Doppler frequency are used to determine a pseudo target by electromagnetic noise, in ST13 of FIGS. The result of detecting the peak value as the relative speed BIN corresponding to the frequency is shown.
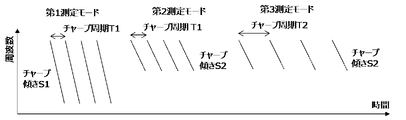
- FIG. 10 shows radar signals in two measurement modes used in this embodiment.
- the absolute value of the chirp slope S1 in the first measurement mode is greater than the absolute value of the chirp slope S2 in the second measurement mode, and the chirp periods in the first and second measurement modes have the same value T. .
- the true target 2 exists at a long distance, it is outside the detection range of the first measurement mode and is observed only in the second measurement mode.
- the pseudo target due to electromagnetic noise has the same distance BIN in both the first measurement mode and the second measurement mode because the frequency of the electromagnetic noise corresponds to the beat frequency.
- the Doppler frequency corresponding to the electromagnetic noise is the same value, and the relative velocity BIN is also the same in the first measurement mode and the second measurement mode. has a value of That is, in the first measurement mode and the second measurement mode, it can be determined that the target corresponding to the peak where both the distance BIN and the relative velocity BIN match is a pseudo target caused by electromagnetic noise.
- the determination unit 24 After completing the signal processing for the measurement mode, the calculation results of the first measurement mode, the second measurement mode, and the third measurement mode are acquired from the memory. After that, the determination unit 24 compares the distance R and the relative velocity v corresponding to the peak value in the two-dimensional spectrum of each measurement mode, and determines whether the target corresponding to each peak value is a pseudo target due to electromagnetic noise. make a judgment as to whether
- step ST53 if there is a target pair that satisfies the condition of step ST52, the target in the second measurement mode is extracted from the pair of targets, and the two-dimensional spectrum in the third measurement mode is extracted. Acquire information on the target corresponding to the peak value.
- step ST54 regarding the information on the target corresponding to the peak value in the two-dimensional spectrum in the third measurement mode obtained in step ST53, the target in the second measurement mode and the third measurement that satisfy the conditions in step ST52. A comparison is made to see if the distance values and relative velocity values match between targets in the mode.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar Systems Or Details Thereof (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/012652 WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
| CN202280022683.3A CN116997815A (zh) | 2021-03-25 | 2022-03-24 | 雷达装置 |
| DE112022000734.6T DE112022000734T5 (de) | 2021-03-25 | 2022-03-24 | Radareinrichtung |
| PCT/JP2022/014039 WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
| JP2023509306A JP7345703B2 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
| US18/217,867 US12504508B2 (en) | 2021-03-25 | 2023-07-03 | Radar device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/012652 WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022201455A1 true WO2022201455A1 (ja) | 2022-09-29 |
Family
ID=83395476
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/012652 Ceased WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
| PCT/JP2022/014039 Ceased WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/014039 Ceased WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US12504508B2 (https=) |
| JP (1) | JP7345703B2 (https=) |
| CN (1) | CN116997815A (https=) |
| DE (1) | DE112022000734T5 (https=) |
| WO (2) | WO2022201455A1 (https=) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115641729B (zh) * | 2022-12-07 | 2023-09-22 | 创辉达设计股份有限公司 | 一种高速行驶车辆信息抽取方法及系统 |
| WO2025013644A1 (ja) * | 2023-07-11 | 2025-01-16 | ソニーグループ株式会社 | 情報処理装置、レーダ装置及び情報処理方法 |
| CN117310639A (zh) * | 2023-09-05 | 2023-12-29 | 苏州承泰科技有限公司 | 一种应用于毫米波雷达的杂散识别方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150002332A1 (en) * | 2013-06-28 | 2015-01-01 | Robert Bosch Gmbh | Radar sensor and method for operating a radar sensor |
| JP2017090143A (ja) * | 2015-11-06 | 2017-05-25 | 富士通テン株式会社 | レーダ装置、レーダ装置用の信号処理装置及び信号処理方法 |
| JP2019184370A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社Soken | レーダシステム |
| JP6797334B1 (ja) * | 2020-02-21 | 2020-12-09 | 三菱電機株式会社 | レーダ装置、観測対象検出方法および車載装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10232281A (ja) * | 1997-02-20 | 1998-09-02 | Matsushita Electric Ind Co Ltd | Fmcwレーダ装置 |
| US8311074B2 (en) * | 2000-10-10 | 2012-11-13 | Freescale Semiconductor, Inc. | Low power, high resolution timing generator for ultra-wide bandwidth communication systems |
| US6711219B2 (en) * | 2000-12-04 | 2004-03-23 | Tensorcomm, Incorporated | Interference cancellation in a signal |
| US6492938B1 (en) * | 2002-02-11 | 2002-12-10 | Delphi Technologies, Inc. | Method of associating target data in a multi-slope FMCW radar system |
| US6606052B1 (en) * | 2002-03-07 | 2003-08-12 | Visteon Global Technologies, Inc. | Method and apparatus for detecting multiple objects with frequency modulated continuous wave radar |
| DE102004047176A1 (de) * | 2004-09-29 | 2006-04-13 | Robert Bosch Gmbh | Radarsystem für Kraftfahrzeuge |
| JP2010038705A (ja) * | 2008-08-05 | 2010-02-18 | Fujitsu Ten Ltd | 信号処理装置、レーダ装置、車両制御装置、及び信号処理方法 |
| PL2384448T3 (pl) * | 2009-01-31 | 2014-03-31 | Elbit Systems Land & C4I Ltd | Niskoenergetyczny system radarowy |
| JP5382087B2 (ja) * | 2011-11-02 | 2014-01-08 | 株式会社デンソー | レーダ装置 |
| DE102013200404A1 (de) | 2013-01-14 | 2014-07-31 | Robert Bosch Gmbh | Verfahren zur zyklischen Messung von Abständen und Geschwindigkeiten von Objekten mit einem FMCW-Radarsensor |
| KR102144668B1 (ko) * | 2013-11-05 | 2020-08-14 | 현대모비스 주식회사 | 가변 파형을 이용하여 허위 타켓 판별하는 차량용 레이더 및 이를 이용한 허위 타겟 판별 방법 |
| DE102014212390A1 (de) | 2014-06-27 | 2015-12-31 | Robert Bosch Gmbh | Verfahren zur Objektortung mit einem FMCW-Radar |
| EP3098623A1 (en) * | 2015-05-25 | 2016-11-30 | Autoliv Development AB | A vehicle radar system |
| KR20170068950A (ko) * | 2015-12-10 | 2017-06-20 | 김영욱 | Fmcw 레이더 및 이를 이용한 fmcw 레이더의 간섭 회피 방법 |
| US20180095163A1 (en) * | 2016-10-03 | 2018-04-05 | John Lovberg | Phase-modulated continuous wave radar system (with prbs codes) |
| KR102550832B1 (ko) * | 2017-02-24 | 2023-07-03 | 아스틱스 게엠베하 | 편광측정 레이더 데이터를 이용한 물체 분류 방법 및 그에 적합한 장치 |
| JP6952567B2 (ja) | 2017-10-17 | 2021-10-20 | 株式会社デンソーテン | レーダ装置及び信号処理方法 |
| DE102018106858A1 (de) * | 2018-03-22 | 2019-09-26 | Infineon Technologies Ag | Fmcw-radar mit zusätzlicher am zur störungsdetektion |
| JP6771699B2 (ja) * | 2018-05-23 | 2020-10-21 | 三菱電機株式会社 | レーダ装置 |
| US10404261B1 (en) * | 2018-06-01 | 2019-09-03 | Yekutiel Josefsberg | Radar target detection system for autonomous vehicles with ultra low phase noise frequency synthesizer |
| US11500062B2 (en) * | 2018-06-18 | 2022-11-15 | DSCG Solutions, Inc. | Acceleration-based fast SOI processing |
| CN112534298A (zh) * | 2018-08-07 | 2021-03-19 | 株式会社村田制作所 | 雷达装置 |
| DE102018127947B3 (de) * | 2018-11-08 | 2020-03-19 | Infineon Technologies Ag | Mimo fmcw radarsystem |
| WO2020165952A1 (ja) * | 2019-02-12 | 2020-08-20 | 三菱電機株式会社 | レーダ装置、観測対象検出方法及び車載装置 |
| JP6987300B2 (ja) * | 2019-04-04 | 2021-12-22 | 三菱電機株式会社 | レーダ装置、信号処理方法及び車載装置 |
| CN110632587A (zh) * | 2019-10-10 | 2019-12-31 | 南京凌云科技发展有限公司 | 一种基于快速fmcw雷达的弱运动物体监测方法 |
| US20210208272A1 (en) * | 2020-01-06 | 2021-07-08 | Tal Lavian | Radar target detection system for autonomous vehicles with ultra-low phase-noise frequency synthesizer |
-
2021
- 2021-03-25 WO PCT/JP2021/012652 patent/WO2022201455A1/ja not_active Ceased
-
2022
- 2022-03-24 CN CN202280022683.3A patent/CN116997815A/zh active Pending
- 2022-03-24 JP JP2023509306A patent/JP7345703B2/ja active Active
- 2022-03-24 DE DE112022000734.6T patent/DE112022000734T5/de active Pending
- 2022-03-24 WO PCT/JP2022/014039 patent/WO2022203006A1/ja not_active Ceased
-
2023
- 2023-07-03 US US18/217,867 patent/US12504508B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150002332A1 (en) * | 2013-06-28 | 2015-01-01 | Robert Bosch Gmbh | Radar sensor and method for operating a radar sensor |
| JP2017090143A (ja) * | 2015-11-06 | 2017-05-25 | 富士通テン株式会社 | レーダ装置、レーダ装置用の信号処理装置及び信号処理方法 |
| JP2019184370A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社Soken | レーダシステム |
| JP6797334B1 (ja) * | 2020-02-21 | 2020-12-09 | 三菱電機株式会社 | レーダ装置、観測対象検出方法および車載装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112022000734T5 (de) | 2023-11-16 |
| CN116997815A (zh) | 2023-11-03 |
| US20230350012A1 (en) | 2023-11-02 |
| JP7345703B2 (ja) | 2023-09-15 |
| JPWO2022203006A1 (https=) | 2022-09-29 |
| US12504508B2 (en) | 2025-12-23 |
| WO2022203006A1 (ja) | 2022-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1619519B1 (en) | FM-CW radar system | |
| US7791532B2 (en) | Radar | |
| US7460058B2 (en) | Radar | |
| US7187321B2 (en) | Interference determination method and FMCW radar using the same | |
| US6888494B2 (en) | FMCW radar system | |
| JP3788322B2 (ja) | レーダ | |
| US7714771B2 (en) | Method and device for measuring the distance and relative speed of multiple objects | |
| JP7345703B2 (ja) | レーダ装置 | |
| US7522093B2 (en) | Radar for detecting a target by transmitting and receiving an electromagnetic-wave beam | |
| JP2002168947A (ja) | Fm−cwレーダ装置 | |
| JP5693906B2 (ja) | レーダ装置 | |
| JP2004004120A (ja) | Fmcwレーダ装置 | |
| US6825799B2 (en) | Radar apparatus equipped with abnormality detection function | |
| WO2021166205A1 (ja) | レーダ装置、観測対象検出方法および車載装置 | |
| WO2023063093A1 (ja) | レーダ装置及びレーダ装置の干渉対策検出方法 | |
| JP5564244B2 (ja) | 観測信号処理装置 | |
| KR102126071B1 (ko) | 레이더를 이용한 목표물 탐지 방법 및 장치 | |
| JPH0777575A (ja) | レーダ装置 | |
| KR100643939B1 (ko) | 레이더 장치 및 레이더의 거리측정 방법 | |
| JP2003329764A (ja) | パルスレーダ装置 | |
| US12345803B2 (en) | Radar signal processing device, radar signal processing method, radar device, and in-vehicle device | |
| JP5586217B2 (ja) | レーダ装置 | |
| JP2003270330A (ja) | 物体検知装置 | |
| JP2000081481A (ja) | 電波式距離計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21933061 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21933061 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |