WO2022201455A1 - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- WO2022201455A1 WO2022201455A1 PCT/JP2021/012652 JP2021012652W WO2022201455A1 WO 2022201455 A1 WO2022201455 A1 WO 2022201455A1 JP 2021012652 W JP2021012652 W JP 2021012652W WO 2022201455 A1 WO2022201455 A1 WO 2022201455A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- frequency
- target
- modulated signal
- signal
- distance
- Prior art date
Links
- 230000035559 beat frequency Effects 0.000 claims abstract description 34
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 abstract description 4
- 238000005259 measurement Methods 0.000 description 145
- 238000001228 spectrum Methods 0.000 description 68
- 238000000034 method Methods 0.000 description 20
- 238000001514 detection method Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 16
- 230000010355 oscillation Effects 0.000 description 10
- 230000005540 biological transmission Effects 0.000 description 8
- 230000003595 spectral effect Effects 0.000 description 5
- 230000001131 transforming effect Effects 0.000 description 5
- 239000000203 mixture Substances 0.000 description 2
- 239000002131 composite material Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
Images

















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/35—Details of non-pulse systems
- G01S7/352—Receivers
- G01S7/354—Extracting wanted echo-signals
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/343—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using sawtooth modulation
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
- G01S13/08—Systems for measuring distance only
- G01S13/32—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated
- G01S13/34—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal
- G01S13/347—Systems for measuring distance only using transmission of continuous waves, whether amplitude-, frequency-, or phase-modulated, or unmodulated using transmission of continuous, frequency-modulated waves while heterodyning the received signal, or a signal derived therefrom, with a locally-generated signal related to the contemporaneously transmitted signal using more than one modulation frequency
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/50—Systems of measurement based on relative movement of target
- G01S13/58—Velocity or trajectory determination systems; Sense-of-movement determination systems
- G01S13/583—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets
- G01S13/584—Velocity or trajectory determination systems; Sense-of-movement determination systems using transmission of continuous unmodulated waves, amplitude-, frequency-, or phase-modulated waves and based upon the Doppler effect resulting from movement of targets adapted for simultaneous range and velocity measurements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/023—Interference mitigation, e.g. reducing or avoiding non-intentional interference with other HF-transmitters, base station transmitters for mobile communication or other radar systems, e.g. using electro-magnetic interference [EMI] reduction techniques
- G01S7/0232—Avoidance by frequency multiplex
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/023—Interference mitigation, e.g. reducing or avoiding non-intentional interference with other HF-transmitters, base station transmitters for mobile communication or other radar systems, e.g. using electro-magnetic interference [EMI] reduction techniques
- G01S7/0235—Avoidance by time multiplex
Definitions
- the present invention relates to a radar device that calculates the distance to a target and the relative speed to the target.
- a radar apparatus comprises a radar signal output unit that repeatedly outputs a frequency modulated signal, a transmitter/receiver that transmits the frequency modulated signal toward a target and receives a reflected wave from the target, and a frequency modulated signal.
- a beat signal generator that generates a beat signal having a frequency difference between the frequency and the frequency of the reflected wave and converts it into digital data;
- a signal processing unit that calculates the Doppler frequency corresponding to the relative speed with the target and detects the distance and relative speed of the target, and the radar signal output unit changes the frequency with a preset first chirp slope.
- FIG. 1 shows a configuration diagram of a radar device according to this embodiment.
- the radar device 1 is composed of a radar signal output section 11 , a transmission/reception section 15 , a beat signal generation section 18 and a signal processing section 22 .
- the distributor 14 distributes each radar signal repeatedly output from the signal source 13 into two.
- the distributor 14 outputs one of the distributed radar signals to the transmitting antenna 16 and outputs the other distributed radar signal to the beat signal generator 18 as a local oscillation signal.
- the radar signal output unit 11 intermittently and repeatedly outputs the frequency-modulated signal whose frequency changes over time to the transmission/reception unit 15 as a radar signal.
- the transmitting/receiving unit 15 includes a transmitting antenna 16 and a receiving antenna 17, transmits the radar signal repeatedly output from the radar signal output unit 11 toward the target, and reflects each radar signal reflected by the target. Receive as waves.
- the transmission/reception unit 15 in which the receiving antenna 17 is directly connected to the frequency mixing unit 19 has been described, but this is only an example, and an amplifier is connected between the receiving antenna 17 and the frequency mixing unit 19.
- the amplifier may amplify the received signal output from the receiving antenna 17 and output the amplified received signal to the frequency mixing section 19 .
- FIG. 3 is a hardware configuration diagram of a computer when the signal processing unit 22 is realized by software, firmware, or the like.
- the signal source 13 repeatedly outputs the radar signal Tx(k) to the distributor 14 according to the output timing indicated by the control signal output from the output controller 12 .
- the distributor 14 divides the radar signal Tx(k) into two each time it receives the radar signal Tx(k) from the signal source 13 .
- the distributor 14 outputs one of the distributed radar signals Tx(k) to the transmitting antenna 16, and outputs the other distributed radar signal Tx(k) to the frequency mixer 19 as the local oscillation signal Lo(k). do.
- step ST ⁇ b>12 the second spectrum calculator 52 repeatedly acquires K first frequency spectra from the first spectrum calculator 51 .
- the second spectrum calculator 52 calculates a second frequency spectrum by Fourier transforming the K first frequency spectra in the Doppler direction every time K first frequency spectra are obtained.
- the distance/velocity calculation processing unit 53 compares a plurality of spectrum values included in the two-dimensional spectrum including the first frequency spectrum and the second frequency spectrum with the threshold value Th for peak detection. , a spectral value larger than the threshold value Th among a plurality of spectral values is detected as a peak value.
- the threshold value Th for peak detection may be stored in the internal memory of the distance/velocity calculation processing unit 53 or may be given from the outside of the radar device 1 .
- the peak value detected in step ST13 is the location indicated by the distance/velocity calculation result (ST13) in FIGS.
- ST13 distance/velocity calculation result
- FIG. 6 since there is no electromagnetic noise, only the peak values of the target are indicated by circles, and in FIG. 7, not only the peak values of the target but also the peak values of the electromagnetic noise are indicated by triangles. ing.
- the beat frequency and the Doppler frequency are used to determine a pseudo target by electromagnetic noise, in ST13 of FIGS. The result of detecting the peak value as the relative speed BIN corresponding to the frequency is shown.
- FIG. 10 shows radar signals in two measurement modes used in this embodiment.
- the absolute value of the chirp slope S1 in the first measurement mode is greater than the absolute value of the chirp slope S2 in the second measurement mode, and the chirp periods in the first and second measurement modes have the same value T. .
- the true target 2 exists at a long distance, it is outside the detection range of the first measurement mode and is observed only in the second measurement mode.
- the pseudo target due to electromagnetic noise has the same distance BIN in both the first measurement mode and the second measurement mode because the frequency of the electromagnetic noise corresponds to the beat frequency.
- the Doppler frequency corresponding to the electromagnetic noise is the same value, and the relative velocity BIN is also the same in the first measurement mode and the second measurement mode. has a value of That is, in the first measurement mode and the second measurement mode, it can be determined that the target corresponding to the peak where both the distance BIN and the relative velocity BIN match is a pseudo target caused by electromagnetic noise.
- the determination unit 24 After completing the signal processing for the measurement mode, the calculation results of the first measurement mode, the second measurement mode, and the third measurement mode are acquired from the memory. After that, the determination unit 24 compares the distance R and the relative velocity v corresponding to the peak value in the two-dimensional spectrum of each measurement mode, and determines whether the target corresponding to each peak value is a pseudo target due to electromagnetic noise. make a judgment as to whether
- step ST53 if there is a target pair that satisfies the condition of step ST52, the target in the second measurement mode is extracted from the pair of targets, and the two-dimensional spectrum in the third measurement mode is extracted. Acquire information on the target corresponding to the peak value.
- step ST54 regarding the information on the target corresponding to the peak value in the two-dimensional spectrum in the third measurement mode obtained in step ST53, the target in the second measurement mode and the third measurement that satisfy the conditions in step ST52. A comparison is made to see if the distance values and relative velocity values match between targets in the mode.
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
周波数変調信号を繰り返し出力するレーダ信号出力部と、周波数変調信号を物標に向けて送信するとともに物標からの反射波を受信する送受信部と、周波数変調信号の周波数と、反射波の周波数との差分の周波数を有するビート信号を生成し、デジタルデータに変換するビート信号生成部と、デジタルデータを用いて、物標との距離に対応するビート周波数と、物標との相対速度に対応するドップラ周波数を算出し、物標の距離と相対速度を検出する信号処理部とを備え、レーダ信号出力部は、予め設定された第1のチャープ傾きで周波数が変化し、予め設定された第1のチャープ周期で繰り返す第1の周波数変調信号と、第1のチャープ傾きとは異なる第2のチャープ傾きで周波数が変化し、第1のチャープ周期で繰り返す第2の周波数変調信号を出力し、信号処理部は、第1の周波数変調信号における物標のビート周波数と第2の周波数変調信号における物標のビート周波数とが一致するとともに、第2の周波数変調信号における物標のドップラ周波数と第2の周波数変調信号における物標のドップラ周波数とが一致した場合、第1の周波数変調信号における物標及び第2の周波数変調信号における物標を疑似物標と判定するレーダ装置。
Description
本発明は、物標までの距離及び物標との相対速度を算出するレーダ装置に関するものである。
物標までの距離及び物標との相対速度を算出するレーダ装置として、時間の経過に伴って周波数が変化するレーダ信号を送信するFMCW(Frequency Modulated Continuous Wave)方式のレーダ装置がある。
このFMCW方式のレーダ装置は、レーダ信号帯域外の外来電波や電磁ノイズ(以下、電磁ノイズ)を疑似的な物標として誤検出してしまうことがあるため、レーダ装置に対する電磁ノイズの影響を抑制すべく、電磁シールドなどのハードウェアによる対策が一般的に適用されている。しかし、この対策部品によるコストの増大だけではなく、レーダ装置全体の重量、容積等が大きくなってしまうという問題があった。
これに対して、対策部品を用いることの代わりにレーダの信号処理によって電磁ノイズによる疑似物標を判別し、除去する方法が開示されている。
このFMCW方式のレーダ装置は、レーダ信号帯域外の外来電波や電磁ノイズ(以下、電磁ノイズ)を疑似的な物標として誤検出してしまうことがあるため、レーダ装置に対する電磁ノイズの影響を抑制すべく、電磁シールドなどのハードウェアによる対策が一般的に適用されている。しかし、この対策部品によるコストの増大だけではなく、レーダ装置全体の重量、容積等が大きくなってしまうという問題があった。
これに対して、対策部品を用いることの代わりにレーダの信号処理によって電磁ノイズによる疑似物標を判別し、除去する方法が開示されている。
特許文献1には、送信される送信波を予め設定された第1の変化率で周波数が変化する第1測定モード、及び前記第1の変化率とは異なる第2の変化率で周波数が変化する第2測定モードとを有するレーダ装置が開示されている。
特許文献1に開示されているレーダ装置は、第1測定モードの動作時に抽出されたピーク信号成分と、第2測定モードで抽出されたピーク信号成分とで、少なくとも周波数が略同一であれば、電磁ノイズが混入しているものと判定する。
特許文献1に開示されているレーダ装置は、第1測定モードの動作時に抽出されたピーク信号成分と、第2測定モードで抽出されたピーク信号成分とで、少なくとも周波数が略同一であれば、電磁ノイズが混入しているものと判定する。
FMCW方式のレーダの中で、周波数変調信号を断続的に繰り返し出力するレーダ信号を用いて得られたビート信号を周波数解析し、距離に対応するビート周波数と相対速度に対応するドップラ周波数から距離と相対速度を算出するFCM(Fast Chirp Modulation)と呼ばれる方式がある。
FCM方式は、相対速度の識別精度向上や多目標環境での識別能力向上という利点を持つことから近年普及しているが、異なる勾配の変調パターンを有する送信波による検出結果を用いて電磁ノイズによる疑似物標を区別する方式だと、FCM方式では、異なる周波数変化率の変調パターンの送信波であっても、電磁ノイズに起因するピーク信号成分のドップラ周波数が一致しない場合があり、周波数の一致だけでは電磁ノイズによる疑似物標であるか否かの判定ができない、という課題があった。
FCM方式は、相対速度の識別精度向上や多目標環境での識別能力向上という利点を持つことから近年普及しているが、異なる勾配の変調パターンを有する送信波による検出結果を用いて電磁ノイズによる疑似物標を区別する方式だと、FCM方式では、異なる周波数変化率の変調パターンの送信波であっても、電磁ノイズに起因するピーク信号成分のドップラ周波数が一致しない場合があり、周波数の一致だけでは電磁ノイズによる疑似物標であるか否かの判定ができない、という課題があった。
この発明に係るレーダ装置は、周波数変調信号を繰り返し出力するレーダ信号出力部と、周波数変調信号を物標に向けて送信するとともに物標からの反射波を受信する送受信部と、周波数変調信号の周波数と、反射波の周波数との差分の周波数を有するビート信号を生成し、デジタルデータに変換するビート信号生成部と、デジタルデータを用いて、物標との距離に対応するビート周波数と、物標との相対速度に対応するドップラ周波数を算出し、物標の距離と相対速度を検出する信号処理部とを備え、レーダ信号出力部は、予め設定された第1のチャープ傾きで周波数が変化し、予め設定された第1のチャープ周期で繰り返す第1の周波数変調信号と、第1のチャープ傾きとは異なる第2のチャープ傾きで周波数が変化し、第1のチャープ周期で繰り返す第2の周波数変調信号を出力し、信号処理部は、第1の周波数変調信号における物標のビート周波数と第2の周波数変調信号における物標のビート周波数とが一致するとともに、第2の周波数変調信号における物標のドップラ周波数と第2の周波数変調信号における物標のドップラ周波数とが一致した場合、第1の周波数変調信号における物標及び第2の周波数変調信号における物標を疑似物標と判定するものである。
本発明によれば、FCM方式のレーダ装置に対して、電磁シールド等による電磁ノイズ対策を導入することなく、レーダの信号処理によって電磁ノイズによる疑似物標の判定や除去を実施することができる。
実施の形態1.
本実施の形態に係るレーダ装置の構成図を図1に示す。
図1において、レーダ装置1は、レーダ信号出力部11、送受信部15、ビート信号生成部18、信号処理部22で構成されている。
本実施の形態に係るレーダ装置の構成図を図1に示す。
図1において、レーダ装置1は、レーダ信号出力部11、送受信部15、ビート信号生成部18、信号処理部22で構成されている。
レーダ信号出力部11は、出力制御部12、信号源13、分配器14を備えている。
出力制御部12は、周波数変調信号の変調指令および出力タイミングを示す制御信号を信号源13に出力する。
信号源13は、出力制御部12から出力された制御信号が示す変調指令および出力タイミングに従って、周波数変調信号をレーダ信号として断続的に繰り返し分配器14に出力する。
出力制御部12は、周波数変調信号の変調指令および出力タイミングを示す制御信号を信号源13に出力する。
信号源13は、出力制御部12から出力された制御信号が示す変調指令および出力タイミングに従って、周波数変調信号をレーダ信号として断続的に繰り返し分配器14に出力する。
分配器14は、信号源13から繰り返し出力されたそれぞれのレーダ信号を2つに分配する。分配器14は、分配後の一方のレーダ信号を送信アンテナ16に出力し、分配後の他方のレーダ信号を局部発振信号としてビート信号生成部18に出力する。
このように、レーダ信号出力部11は、時間の経過に伴って周波数が変化する周波数変調信号をレーダ信号として断続的に繰り返し送受信部15に出力する。
送受信部15は、送信アンテナ16及び受信アンテナ17を備えており、レーダ信号出力部11から繰り返し出力されたレーダ信号を物標に向けて送信し、物標で反射されたそれぞれのレーダ信号を反射波として受信する。
このように、レーダ信号出力部11は、時間の経過に伴って周波数が変化する周波数変調信号をレーダ信号として断続的に繰り返し送受信部15に出力する。
送受信部15は、送信アンテナ16及び受信アンテナ17を備えており、レーダ信号出力部11から繰り返し出力されたレーダ信号を物標に向けて送信し、物標で反射されたそれぞれのレーダ信号を反射波として受信する。
送信アンテナ16は、レーダ信号出力部11から繰り返し出力されたそれぞれのレーダ信号を空間に放射する。
受信アンテナ17は、送信アンテナ16からそれぞれのレーダ信号が空間に放射されたのち、物標に反射されたそれぞれのレーダ信号を反射波として受信し、受信したそれぞれの反射波の受信信号をビート信号生成部18へ出力する。
なお、本実施の形態では、送信アンテナ16が分配器14と直接接続されている送受信部15について説明したが、これは一例に過ぎず、分配器14と送信アンテナ16との間に増幅器が接続されており、増幅器が、分配器14から出力されたレーダ信号を増幅し、増幅後のレーダ信号を送信アンテナ16に出力するようにしてもよい。
また、同様に受信アンテナ17が周波数混合部19と直接接続されている送受信部15について説明したが、これも一例に過ぎず、受信アンテナ17と周波数混合部19との間に増幅器が接続されており、増幅器が、受信アンテナ17から出力された受信信号を増幅し、増幅後の受信信号を周波数混合部19に出力するようにしてもよい。
受信アンテナ17は、送信アンテナ16からそれぞれのレーダ信号が空間に放射されたのち、物標に反射されたそれぞれのレーダ信号を反射波として受信し、受信したそれぞれの反射波の受信信号をビート信号生成部18へ出力する。
なお、本実施の形態では、送信アンテナ16が分配器14と直接接続されている送受信部15について説明したが、これは一例に過ぎず、分配器14と送信アンテナ16との間に増幅器が接続されており、増幅器が、分配器14から出力されたレーダ信号を増幅し、増幅後のレーダ信号を送信アンテナ16に出力するようにしてもよい。
また、同様に受信アンテナ17が周波数混合部19と直接接続されている送受信部15について説明したが、これも一例に過ぎず、受信アンテナ17と周波数混合部19との間に増幅器が接続されており、増幅器が、受信アンテナ17から出力された受信信号を増幅し、増幅後の受信信号を周波数混合部19に出力するようにしてもよい。
ビート信号生成部18は、周波数混合部19、フィルタ部20及びADC(Analog to Digital Converter)21を備えている。
周波数混合部19は、分配器14から出力された局部発振信号と受信アンテナ17から出力された受信信号とを混合することで、分配器14から出力された局部発振信号の周波数と、受信信号の周波数との差分の周波数を有するビート信号を生成し、フィルタ部20へ出力する。
フィルタ部20は、LPF(Low Pass Filter)又はBPF(Band Pass Filter)等によって実現され、周波数混合部19から出力されたビート信号に含まれているスプリアス等の不要な成分を抑圧し、不要成分抑圧後のビート信号をADC21に出力する。
周波数混合部19は、分配器14から出力された局部発振信号と受信アンテナ17から出力された受信信号とを混合することで、分配器14から出力された局部発振信号の周波数と、受信信号の周波数との差分の周波数を有するビート信号を生成し、フィルタ部20へ出力する。
フィルタ部20は、LPF(Low Pass Filter)又はBPF(Band Pass Filter)等によって実現され、周波数混合部19から出力されたビート信号に含まれているスプリアス等の不要な成分を抑圧し、不要成分抑圧後のビート信号をADC21に出力する。
ADC21は、フィルタ部20から出力されたビート信号をデジタルデータに変換し、デジタルデータを信号処理部22に出力する。
信号処理部22は、距離速度算出部23、判定部24及び物標検出部25を備えている。
距離速度算出部23は、ビート信号生成部18のADC21から出力された複数のデジタルデータを用いて、ビート周波数とドップラ周波数のそれぞれを算出し、さらに物標までの距離及び物標との相対速度のそれぞれを算出する。
信号処理部22は、距離速度算出部23、判定部24及び物標検出部25を備えている。
距離速度算出部23は、ビート信号生成部18のADC21から出力された複数のデジタルデータを用いて、ビート周波数とドップラ周波数のそれぞれを算出し、さらに物標までの距離及び物標との相対速度のそれぞれを算出する。
距離速度算出部23は、算出したビート周波数、ドップラ周波数、距離および相対速度の値のそれぞれを判定部24に出力する。
距離速度算出部23の一例を図4に示す。
図4において、51は第1のスペクトル算出部、52は第2のスペクトル算出部、53は距離速度算出処理部である。
距離速度算出部23の一例を図4に示す。
図4において、51は第1のスペクトル算出部、52は第2のスペクトル算出部、53は距離速度算出処理部である。
第1のスペクトル算出部51は、出力制御部12から出力された制御信号が示す出力タイミングに同期して、ADC21から出力されたデジタルデータを繰り返し取得し、それぞれのデジタルデータを距離方向にフーリエ変換することで、第1の周波数スペクトルを繰り返し算出する。
また、第1のスペクトル算出部51は、繰り返し算出したそれぞれの第1の周波数スペクトルを第2のスペクトル算出部52に出力する。
また、第1のスペクトル算出部51は、繰り返し算出したそれぞれの第1の周波数スペクトルを第2のスペクトル算出部52に出力する。
第2のスペクトル算出部52は、第1のスペクトル算出部51からK(Kは、2以上の整数)個の第1の周波数スペクトルを繰り返し取得する。
第2のスペクトル算出部52は、K個の第1の周波数スペクトルを取得する毎に、K個の第1の周波数スペクトルをドップラ方向にフーリエ変換することで、第2の周波数スペクトルを算出し、距離速度算出処理部53に出力する。
また、第2のスペクトル算出部52は、K個の第1の周波数スペクトルを積算し、積算後の第1の周波数スペクトルを距離速度算出処理部53に出力する。
第2のスペクトル算出部52は、K個の第1の周波数スペクトルを取得する毎に、K個の第1の周波数スペクトルをドップラ方向にフーリエ変換することで、第2の周波数スペクトルを算出し、距離速度算出処理部53に出力する。
また、第2のスペクトル算出部52は、K個の第1の周波数スペクトルを積算し、積算後の第1の周波数スペクトルを距離速度算出処理部53に出力する。
距離速度算出処理部53は、第2のスペクトル算出部52から出力された積算後の第1の周波数スペクトルのピーク値に対応している周波数であるビート周波数を検出し、物標までの距離を算出する。
距離速度算出処理部53は、第2のスペクトル算出部52から出力された第2の周波数スペクトルのピーク値に対応している周波数であるドップラ周波数を検出する。
また、距離速度算出処理部53は、検出したドップラ周波数から物標との相対速度を算出する。
最後に距離速度算出処理部53は、算出した物標までの距離及び物標との相対速度のそれぞれを判定部24に出力する。
距離速度算出処理部53は、第2のスペクトル算出部52から出力された第2の周波数スペクトルのピーク値に対応している周波数であるドップラ周波数を検出する。
また、距離速度算出処理部53は、検出したドップラ周波数から物標との相対速度を算出する。
最後に距離速度算出処理部53は、算出した物標までの距離及び物標との相対速度のそれぞれを判定部24に出力する。
判定部24は、距離速度算出部23により算出されたビート周波数と、距離速度算出部23により算出されたドップラ周波数とに基づいて、物標が、周波数が一定の電磁ノイズに起因するか否かを判定する。
なお、周波数が一定の電磁ノイズとは、周波数が全く変化しない電磁ノイズに限るものではなく、実用上問題のない範囲で、周波数が微小に変化している電磁ノイズを含むもの、例えば、連続波(CW:Continuous Wave)の電磁波を想定している。
判定部24は、物標が電磁ノイズに起因しないと判定した場合、距離速度算出部23により算出された距離、及び相対速度のそれぞれを物標検出部25に出力する。
なお、周波数が一定の電磁ノイズとは、周波数が全く変化しない電磁ノイズに限るものではなく、実用上問題のない範囲で、周波数が微小に変化している電磁ノイズを含むもの、例えば、連続波(CW:Continuous Wave)の電磁波を想定している。
判定部24は、物標が電磁ノイズに起因しないと判定した場合、距離速度算出部23により算出された距離、及び相対速度のそれぞれを物標検出部25に出力する。
物標検出部25は、判定部24から出力された距離と相対速度のそれぞれを取得する。
物標検出部25は、物標の検出結果として、取得した距離と相対速度のそれぞれをレーダ装置1の外部に出力する。
本実施の形態では、信号処理部22の構成要素である距離速度算出部23、判定部24及び物標検出部25のそれぞれが、図2に示すような専用のハードウェアによって実現されるものを想定している。即ち、信号処理部22が、距離速度算出回路31、判定回路32及び物標検出回路33によって実現されるものを想定している。
物標検出部25は、物標の検出結果として、取得した距離と相対速度のそれぞれをレーダ装置1の外部に出力する。
本実施の形態では、信号処理部22の構成要素である距離速度算出部23、判定部24及び物標検出部25のそれぞれが、図2に示すような専用のハードウェアによって実現されるものを想定している。即ち、信号処理部22が、距離速度算出回路31、判定回路32及び物標検出回路33によって実現されるものを想定している。
ここで、距離速度算出回路31、判定回路32及び物標検出回路33のそれぞれは、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC(Application Specific Integrated Circuit)、FPGA(Field-Programmable Gate Array)、又は、これらを組み合わせたものが該当する。
信号処理部22の構成要素は、専用のハードウェアによって実現されるものに限るものではなく、信号処理部22がソフトウェア、ファームウェア、又は、ソフトウェアとファームウェアとの組み合わせによって実現されるものであってもよい。
信号処理部22の構成要素は、専用のハードウェアによって実現されるものに限るものではなく、信号処理部22がソフトウェア、ファームウェア、又は、ソフトウェアとファームウェアとの組み合わせによって実現されるものであってもよい。
ソフトウェア又はファームウェアは、プログラムとして、コンピュータのメモリに格納される。コンピュータは、プログラムを実行するハードウェアを意味し、例えば、CPU(Central Processing Unit)、中央処理装置、処理装置、演算装置、マイクロプロセッサ、マイクロコンピュータ、プロセッサ、あるいは、DSP(Digital Signal Processor)が該当する。
図3は、信号処理部22がソフトウェア又はファームウェア等によって実現される場合のコンピュータのハードウェア構成図である。
図3は、信号処理部22がソフトウェア又はファームウェア等によって実現される場合のコンピュータのハードウェア構成図である。
信号処理部22がソフトウェア又はファームウェア等によって実現される場合、距離速度算出部23、判定部24及び物標検出部25の処理手順をコンピュータに実行させるためのプログラムがメモリ41に格納される。そして、コンピュータのプロセッサ42がメモリ41に格納されているプログラムを実行する。
また、図2では、信号処理部22の構成要素のそれぞれが専用のハードウェアによって実現される例を示し、図3では、信号処理部22がソフトウェア又はファームウェア等によって実現される例を示している。しかし、これは一例に過ぎず、信号処理部22における一部の構成要素が専用のハードウェアによって実現され、残りの構成要素がソフトウェア又はファームウェア等によって実現されるものであってもよい。
また、図2では、信号処理部22の構成要素のそれぞれが専用のハードウェアによって実現される例を示し、図3では、信号処理部22がソフトウェア又はファームウェア等によって実現される例を示している。しかし、これは一例に過ぎず、信号処理部22における一部の構成要素が専用のハードウェアによって実現され、残りの構成要素がソフトウェア又はファームウェア等によって実現されるものであってもよい。
次に本実施の形態に係るレーダ装置1の動作と、電磁ノイズによる疑似物標の発生について説明する。なお、本実施の形態では、電磁ノイズがADC21へ入力することによって発生する疑似物標について説明する。
図6は単一の動作モードにおける、レーダ信号、受信信号、ビート信号及び距離速度算出部23の信号処理を示す説明図である。
図7は、単一の動作モードにおける、電磁ノイズがADC21に入力されている場合の、レーダ信号、受信信号、ビート信号及び距離速度算出部23の信号処理を示す説明図である。
図6及び図7において、Tx(1)、Tx(2)、Tx(3)、・・・、Tx(K)は、レーダ信号を示し、Rx(1)、Rx(2)、Rx(3)、・・・、Rx(K)は、受信信号を示している。
図6は単一の動作モードにおける、レーダ信号、受信信号、ビート信号及び距離速度算出部23の信号処理を示す説明図である。
図7は、単一の動作モードにおける、電磁ノイズがADC21に入力されている場合の、レーダ信号、受信信号、ビート信号及び距離速度算出部23の信号処理を示す説明図である。
図6及び図7において、Tx(1)、Tx(2)、Tx(3)、・・・、Tx(K)は、レーダ信号を示し、Rx(1)、Rx(2)、Rx(3)、・・・、Rx(K)は、受信信号を示している。
レーダ信号Tx(k)(k=1,・・・,K)は、時間の経過に伴って周波数が変化する周波数変調信号である。Tsは、レーダ信号Tx(k)の掃引時間であり、usオーダの時間である。BWは、レーダ信号Tx(k)の周波数帯域幅である。レーダ信号の周波数の時間変化率(チャープ傾き)Sは、BW/Tsで表される。
出力制御部12は、レーダ信号Tx(k)の出力タイミングを示す制御信号を信号源13及び距離速度算出部23のそれぞれに出力する。
レーダ信号Tx(k)の出力タイミングは、図6及び図7に示すように、掃引時間Tsよりも長い時間間隔(チャープ周期T)である。
出力制御部12は、レーダ信号Tx(k)の出力タイミングを示す制御信号を信号源13及び距離速度算出部23のそれぞれに出力する。
レーダ信号Tx(k)の出力タイミングは、図6及び図7に示すように、掃引時間Tsよりも長い時間間隔(チャープ周期T)である。
信号源13は、出力制御部12から出力された制御信号が示す出力タイミングに従って、レーダ信号Tx(k)を分配器14に繰り返し出力する。
分配器14は、信号源13からレーダ信号Tx(k)を受ける毎に、レーダ信号Tx(k)を2つに分配する。
分配器14は、分配後の一方のレーダ信号Tx(k)を送信アンテナ16に出力し、分配後の他方のレーダ信号Tx(k)を局部発振信号Lo(k)として周波数混合部19に出力する。
分配器14は、信号源13からレーダ信号Tx(k)を受ける毎に、レーダ信号Tx(k)を2つに分配する。
分配器14は、分配後の一方のレーダ信号Tx(k)を送信アンテナ16に出力し、分配後の他方のレーダ信号Tx(k)を局部発振信号Lo(k)として周波数混合部19に出力する。
送信アンテナ16は、分配器14からレーダ信号Tx(k)を受ける毎に、レーダ信号Tx(k)を空間に放射する。
受信アンテナ17は、送信アンテナ16からレーダ信号Tx(k)が空間に放射されたのち、物標に反射されたレーダ信号Tx(k)を反射波として受信し、受信した反射波の受信信号Rx(k)を周波数混合部19に出力する。
受信アンテナ17は、送信アンテナ16からレーダ信号Tx(k)が空間に放射されたのち、物標に反射されたレーダ信号Tx(k)を反射波として受信し、受信した反射波の受信信号Rx(k)を周波数混合部19に出力する。
周波数混合部19は、分配器14から局部発振信号Lo(k)を受けて、受信アンテナ17から受信信号Rx(k)を受ける毎に、局部発振信号Lo(k)と受信信号Rx(k)とを混合する。
周波数混合部19は、局部発振信号Lo(k)と受信信号Rx(k)とを混合することで、局部発振信号Lo(k)の周波数と、受信信号Rx(k)の周波数との差分の周波数を有するビート信号を生成する。そして、周波数混合部19は、ビート信号を生成する毎に、生成したビート信号をフィルタ部20に出力する。
周波数混合部19は、局部発振信号Lo(k)と受信信号Rx(k)とを混合することで、局部発振信号Lo(k)の周波数と、受信信号Rx(k)の周波数との差分の周波数を有するビート信号を生成する。そして、周波数混合部19は、ビート信号を生成する毎に、生成したビート信号をフィルタ部20に出力する。
フィルタ部20は、周波数混合部19からビート信号を受ける毎に、ビート信号に含まれているスプリアス等の不要な成分を抑圧し、不要成分抑圧後のビート信号をADC21に出力する。
ADC21は、フィルタ部20からビート信号を受ける毎に、ビート信号をデジタルデータに変換し、デジタルデータを距離速度算出部23に出力する。その際、電磁ノイズがADC21に入力されると図7に示すように、電磁ノイズがビート信号に重畳されてしまうことがある(電磁ノイズの重畳)。なお、ADC21の動作期間(ADC動作タイミング)は、周波数混合部19がビート信号をフィルタ部20に出力している期間に相当する。
ADC21は、フィルタ部20からビート信号を受ける毎に、ビート信号をデジタルデータに変換し、デジタルデータを距離速度算出部23に出力する。その際、電磁ノイズがADC21に入力されると図7に示すように、電磁ノイズがビート信号に重畳されてしまうことがある(電磁ノイズの重畳)。なお、ADC21の動作期間(ADC動作タイミング)は、周波数混合部19がビート信号をフィルタ部20に出力している期間に相当する。
距離速度算出部23は、ADC21から繰り返し出力された複数のデジタルデータを用いて、物標までの距離及び物標との相対速度のそれぞれを算出する。そして、距離速度算出部23は、算出した距離及び相対速度のそれぞれを判定部24に出力する。
図5のフローチャートを用いて距離速度算出部23の処理手順を説明する。
ステップST11において、第1のスペクトル算出部51は、出力制御部12から出力された制御信号が示す出力タイミングに同期して、分配器14から局部発振信号Lo(k)が出力されている期間中に、ADC21から出力されたデジタルデータを繰り返し取得する。
第1のスペクトル算出部51は、ADC21からデジタルデータを取得する毎に、デジタルデータを距離方向にフーリエ変換することで、第1の周波数スペクトルを算出する。
図5のフローチャートを用いて距離速度算出部23の処理手順を説明する。
ステップST11において、第1のスペクトル算出部51は、出力制御部12から出力された制御信号が示す出力タイミングに同期して、分配器14から局部発振信号Lo(k)が出力されている期間中に、ADC21から出力されたデジタルデータを繰り返し取得する。
第1のスペクトル算出部51は、ADC21からデジタルデータを取得する毎に、デジタルデータを距離方向にフーリエ変換することで、第1の周波数スペクトルを算出する。
このステップST11は、図6及び図7において「FFT(ST11)」で示している箇所であり、第1のスペクトル算出部51による距離方向の高速フーリエ変換(FFT)を示している。
デジタルデータが距離方向にフーリエ変換されることで、物標からの反射波の受信信号Rx(k)(k=1,・・・,K)のスペクトル値が、以下の式(1)に示すビート周波数Fsb_rに積算される。

デジタルデータが距離方向にフーリエ変換されることで、物標からの反射波の受信信号Rx(k)(k=1,・・・,K)のスペクトル値が、以下の式(1)に示すビート周波数Fsb_rに積算される。
式(1)において、Rは、図1に示すレーダ装置1から物標までの距離、cは、光速である。
同様に、電磁ノイズに起因するスペクトル値は、電磁ノイズの周波数Fn_rに積算される。電磁ノイズの周波数が一定である場合、電磁ノイズのスペクトル値はチャープ傾きSに依らず一定の値を有することになる。
第1のスペクトル算出部51は、K個の第1の周波数スペクトルを算出する毎に、K個の第1の周波数スペクトルを第2のスペクトル算出部52に出力する。
同様に、電磁ノイズに起因するスペクトル値は、電磁ノイズの周波数Fn_rに積算される。電磁ノイズの周波数が一定である場合、電磁ノイズのスペクトル値はチャープ傾きSに依らず一定の値を有することになる。
第1のスペクトル算出部51は、K個の第1の周波数スペクトルを算出する毎に、K個の第1の周波数スペクトルを第2のスペクトル算出部52に出力する。
ステップST12において、第2のスペクトル算出部52は、第1のスペクトル算出部51からK個の第1の周波数スペクトルを繰り返し取得する。
第2のスペクトル算出部52は、K個の第1の周波数スペクトルを取得する毎に、K個の第1の周波数スペクトルをドップラ方向にフーリエ変換することで、第2の周波数スペクトルを算出する。
第2のスペクトル算出部52は、K個の第1の周波数スペクトルを取得する毎に、K個の第1の周波数スペクトルをドップラ方向にフーリエ変換することで、第2の周波数スペクトルを算出する。
このステップST12は、図6及び図7において「FFT(ST12)」で示している箇所であり、第2のスペクトル算出部52によるドップラ方向のフーリエ変換を示している。
K個の第1の周波数スペクトルがドップラ方向にフーリエ変換されることで、物標からの反射波の受信信号Rx(k)のスペクトル値は、図1に示すレーダ装置1と物標との相対速度に対応する、以下の式(2)に示すドップラ周波数Fsb_vに積算される。

K個の第1の周波数スペクトルがドップラ方向にフーリエ変換されることで、物標からの反射波の受信信号Rx(k)のスペクトル値は、図1に示すレーダ装置1と物標との相対速度に対応する、以下の式(2)に示すドップラ周波数Fsb_vに積算される。
式(2)において、fは、局部発振信号Lo(k)の中心周波数、vは、図1に示すレーダ装置1と物標との相対速度である。
また、K個の第1の周波数スペクトルがドップラ方向にフーリエ変換されることで、電磁ノイズに起因するスペクトル値は、電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vに積算される。
また、K個の第1の周波数スペクトルがドップラ方向にフーリエ変換されることで、電磁ノイズに起因するスペクトル値は、電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vに積算される。
図8に、ADC21に入力される電磁ノイズの波形と、距離速度算出部23に入力される電磁ノイズの波形の関係の模式図を示す。
ADC21に入力された電磁ノイズは、ADC21の動作タイミングで切り取られた波形として距離速度算出部23に入力される。
図8の上半分のグラフが距離速度算出部23に入力されるADC21から繰り返し出力された複数のデジタルデータ(横軸が時間、縦軸が周波数)を示しており、図8の下半分のグラフがADC21に入力された電磁ノイズ(横軸が時間、縦軸が振幅)を示している。
電磁ノイズの波形は図8の下半分のグラフの実線で示されている。途中点線の部分は、ADCの動作タイミング外のため、距離速度算出部23は電磁ノイズを受け取らない。
ADC21に入力された電磁ノイズは、ADC21の動作タイミングで切り取られた波形として距離速度算出部23に入力される。
図8の上半分のグラフが距離速度算出部23に入力されるADC21から繰り返し出力された複数のデジタルデータ(横軸が時間、縦軸が周波数)を示しており、図8の下半分のグラフがADC21に入力された電磁ノイズ(横軸が時間、縦軸が振幅)を示している。
電磁ノイズの波形は図8の下半分のグラフの実線で示されている。途中点線の部分は、ADCの動作タイミング外のため、距離速度算出部23は電磁ノイズを受け取らない。
ADC21の動作タイミングで切り取られたK個の電磁ノイズの波形は、電磁ノイズの周波数が一定であれば、レーダ信号の繰返し周期(チャープ周期)Tと電磁ノイズの周波数によって決定される位相差を有する。
よって、ADC21に入力された電磁ノイズから算出されたK個の第1の周波数スペクトルは、それぞれ隣接する第1の周波数スペクトルに対してチャープ周期と電磁ノイズの周波数で決まる位相差を持つ。
よって、ADC21に入力された電磁ノイズから算出されたK個の第1の周波数スペクトルは、それぞれ隣接する第1の周波数スペクトルに対してチャープ周期と電磁ノイズの周波数で決まる位相差を持つ。
ドップラ方向のフーリエ変換は、K個の第1の周波数スペクトル間の位相差を求めることに対応するため、電磁ノイズによる疑似物標の相対速度に対応するドップラ周波数Fn_vは電磁ノイズの周波数とチャープ周期Tで決まる値に積算される。
よって、電磁ノイズの周波数が一定であれば、電磁ノイズによる疑似物標に対応するドップラ周波数は、チャープ周期Tのみにより一意に決定することができる。
第2のスペクトル算出部52は、第2の周波数スペクトルを算出する毎に、第2の周波数スペクトルを距離速度算出処理部53に出力する。
よって、電磁ノイズの周波数が一定であれば、電磁ノイズによる疑似物標に対応するドップラ周波数は、チャープ周期Tのみにより一意に決定することができる。
第2のスペクトル算出部52は、第2の周波数スペクトルを算出する毎に、第2の周波数スペクトルを距離速度算出処理部53に出力する。
また、第2のスペクトル算出部52は、K個の第1の周波数スペクトルを積算し、積算後の第1の周波数スペクトルを距離速度算出処理部53に出力する。
ステップST13において、距離速度算出処理部53は、第2のスペクトル算出部52で積算された第1の周波数スペクトルと第2の周波数スペクトルを、2次元スペクトルとして配列し、2次元スペクトルにおけるピーク値を抽出する。そして、距離速度算出処理部53は、第1の周波数スペクトルにおいてピーク値に対応しているビート周波数Fsb_rと、第2の周波数スペクトルにおいてピーク値に対応しているドップラ周波数Fsb_vを検出する。
ステップST13において、距離速度算出処理部53は、第2のスペクトル算出部52で積算された第1の周波数スペクトルと第2の周波数スペクトルを、2次元スペクトルとして配列し、2次元スペクトルにおけるピーク値を抽出する。そして、距離速度算出処理部53は、第1の周波数スペクトルにおいてピーク値に対応しているビート周波数Fsb_rと、第2の周波数スペクトルにおいてピーク値に対応しているドップラ周波数Fsb_vを検出する。
具体的には、距離速度算出処理部53は、第1の周波数スペクトルと第2の周波数スペクトルからなる2次元スペクトルに含まれている複数のスペクトル値と、ピーク検出用の閾値Thとを比較し、複数のスペクトル値の中で閾値Thよりも大きなスペクトル値をピーク値として検出する。このピーク検出用の閾値Thは、距離速度算出処理部53の内部メモリに格納されていてもよいし、レーダ装置1の外部から与えられるものであってもよい。
このステップST13で検出されたピーク値は、図6及び図7において距離速度算出結果(ST13)で示している箇所である。なお、図6は電磁ノイズが無い場合ので、物標のピーク値だけは丸印で示され、図7は物標のピーク値だけでなく、電磁ノイズのピーク値が三角印で一緒に示されている。
なお、本実施の形態では、電磁ノイズによる疑似物標の判定にビート周波数とドップラ周波数を用いるため、図6および図7のST13では、縦軸をビート周波数に対応した距離BIN、横軸をドップラ周波数に対応した相対速度BINとしてピーク値を検出した結果を示している。
なお、本実施の形態では、電磁ノイズによる疑似物標の判定にビート周波数とドップラ周波数を用いるため、図6および図7のST13では、縦軸をビート周波数に対応した距離BIN、横軸をドップラ周波数に対応した相対速度BINとしてピーク値を検出した結果を示している。
距離速度算出処理部53により検出されたピークは、ADC21に電磁ノイズが入力されていない場合には、真の物標に係るビート周波数Fsb_rとドップラ周波数Fsb_vに対応するが(図6のST13)、ADC21に電磁ノイズが入力されている場合には、電磁ノイズの周波数Fn_rと電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vに対応するものが含まれる(図7のST13)。
距離速度算出処理部53は、ビート周波数Fsb_rを検出すると、ビート周波数Fsb_rを以下の式(3)に代入して、図2に示すレーダ装置1から物標までの距離Rを算出する。

距離速度算出処理部53は、ビート周波数Fsb_rを検出すると、ビート周波数Fsb_rを以下の式(3)に代入して、図2に示すレーダ装置1から物標までの距離Rを算出する。
距離速度算出処理部53は、ドップラ周波数Fsb_vを検出すると、ドップラ周波数Fsb_vを以下の式(4)に代入して、図1に示すレーダ装置1と物標との相対速度vを算出する。

距離速度算出処理部53は、距離R及び相対速度vのそれぞれを算出する毎に、距離R及び相対速度v、およびそれらに対応したビート周波数およびドップラ周波数のそれぞれを判定部24に出力する。
電磁ノイズによる疑似物標の判定処理がなされない場合、真の物標に係るビート周波数Fsb_rと電磁ノイズの周波数Fn_r、および真の物標に係るドップラ周波数Fsb_vと電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vの区別がされない。よって、ADC21に電磁ノイズが入力されている場合には、電磁ノイズの周波数Fn_rを式(3)のビート周波数Fsb_rに代入して得られる距離値R、および電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vを式(4)に代入して得られる相対速度値vを有する疑似物標が出力されることになる。
電磁ノイズによる疑似物標の判定処理がなされない場合、真の物標に係るビート周波数Fsb_rと電磁ノイズの周波数Fn_r、および真の物標に係るドップラ周波数Fsb_vと電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vの区別がされない。よって、ADC21に電磁ノイズが入力されている場合には、電磁ノイズの周波数Fn_rを式(3)のビート周波数Fsb_rに代入して得られる距離値R、および電磁ノイズによる疑似物標に対応するドップラ周波数Fn_vを式(4)に代入して得られる相対速度値vを有する疑似物標が出力されることになる。
次に、図9に示すフローチャートを用いて電磁ノイズによる疑似物標の判定処理について説明する。
本実施の形態では、異なるチャープ傾きを有し、かつ、同一のチャープ周期を有する2つの測定モードのレーダ信号を周期的に交互に送受信し、それぞれの測定モードでの信号処理結果を比較することで電磁ノイズによる疑似物標の判定を行う。
図10は、本実施の形態で用いる2つの測定モードのレーダ信号である。
図10において、第1測定モードのチャープ傾きS1の絶対値は、第2測定モードのチャープ傾きS2の絶対値より大きく、第1測定モードと第2測定モードのチャープ周期は同一の値Tを有する。チャープ傾きの絶対値が大きいほど距離分解能が高いことから、第1測定モードは近距離測定用、第2測定モードは遠距離測定用に割り当てられる。この第1測定モードで用いるレーダ信号を第1の周波数変調信号と呼び、第2測定モードで用いるレーダ信号を第2の周波数変調信号と呼ぶ。
本実施の形態では、異なるチャープ傾きを有し、かつ、同一のチャープ周期を有する2つの測定モードのレーダ信号を周期的に交互に送受信し、それぞれの測定モードでの信号処理結果を比較することで電磁ノイズによる疑似物標の判定を行う。
図10は、本実施の形態で用いる2つの測定モードのレーダ信号である。
図10において、第1測定モードのチャープ傾きS1の絶対値は、第2測定モードのチャープ傾きS2の絶対値より大きく、第1測定モードと第2測定モードのチャープ周期は同一の値Tを有する。チャープ傾きの絶対値が大きいほど距離分解能が高いことから、第1測定モードは近距離測定用、第2測定モードは遠距離測定用に割り当てられる。この第1測定モードで用いるレーダ信号を第1の周波数変調信号と呼び、第2測定モードで用いるレーダ信号を第2の周波数変調信号と呼ぶ。
図9に戻り、ステップST21において、信号処理部22は、第1測定モードでのビート信号のデジタルデータをビート信号生成部18から取得する。
次に、ステップST22において、距離速度算出部23は、第1測定モードで取得したデジタルデータに対して距離速度情報の算出処理を行い、算出結果をメモリに格納する。
第1測定モードに対する信号処理が完了すると、ステップST23において、信号処理部22は、第2測定モードでのビート信号のデジタルデータをビート信号生成部18から取得する。
次に、ステップST22において、距離速度算出部23は、第1測定モードで取得したデジタルデータに対して距離速度情報の算出処理を行い、算出結果をメモリに格納する。
第1測定モードに対する信号処理が完了すると、ステップST23において、信号処理部22は、第2測定モードでのビート信号のデジタルデータをビート信号生成部18から取得する。
次に、ST24において、距離速度算出部23は、第2測定モードで取得したデジタルデータに対して距離速度情報の算出処理を行い、算出結果をメモリに格納する。
第2測定モードに対する信号処理完了後、ステップST25において、判定部24は、第1測定モードと第2測定モードそれぞれの算出結果をメモリから取得する。その後、判定部24は、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、ビート周波数とドップラ周波数の比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う。
具体的には、2つの測定モードにおいて、ビート周波数とドップラ周波数がともに一致した物標のペアは、電磁ノイズによる疑似物標であると判定する。
第2測定モードに対する信号処理完了後、ステップST25において、判定部24は、第1測定モードと第2測定モードそれぞれの算出結果をメモリから取得する。その後、判定部24は、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、ビート周波数とドップラ周波数の比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う。
具体的には、2つの測定モードにおいて、ビート周波数とドップラ周波数がともに一致した物標のペアは、電磁ノイズによる疑似物標であると判定する。
図11は、本実施の形態において、レーダ装置1に対して近距離にある真の物標1と、レーダ装置1から遠方の距離にある真の物標2と、電磁ノイズによる疑似物標が混在している環境での信号処理とその結果である2次元スペクトルを示したものである。この図において、横軸はドップラ周波数に対応する相対速度BIN、縦軸はビート周波数に対応する距離BINである。
真の物標1は、近距離に存在するため第1測定モードと第2測定モードの両方で検出されるが、第1測定モードと第2測定モードでチャープ傾きが異なるため、真の物標1の距離BINは各測定モードのチャープ傾きと、レーダ装置1と物標間の距離との積に対応した異なる値となる。なお、真の物標2は遠距離に存在するため第1測定モードの検出範囲外にあり、第2測定モードのみで観測されている。
一方、電磁ノイズによる疑似物標は、電磁ノイズの周波数がビート周波数に対応するため、第1測定モード、第2測定モードともに同一の距離BINを有する。また、第1測定モードと第2測定モードでチャープ周期が同一であることから、電磁ノイズに対応したドップラ周波数は同一の値となり、相対速度BINについても第1測定モード、第2測定モードともに同一の値を有する。つまり、第1測定モード、第2測定モードにおいて、距離BIN、相対速度BINがともに一致するピークに対応した物標が、電磁ノイズによる疑似物標である、と判定することができる。
真の物標1は、近距離に存在するため第1測定モードと第2測定モードの両方で検出されるが、第1測定モードと第2測定モードでチャープ傾きが異なるため、真の物標1の距離BINは各測定モードのチャープ傾きと、レーダ装置1と物標間の距離との積に対応した異なる値となる。なお、真の物標2は遠距離に存在するため第1測定モードの検出範囲外にあり、第2測定モードのみで観測されている。
一方、電磁ノイズによる疑似物標は、電磁ノイズの周波数がビート周波数に対応するため、第1測定モード、第2測定モードともに同一の距離BINを有する。また、第1測定モードと第2測定モードでチャープ周期が同一であることから、電磁ノイズに対応したドップラ周波数は同一の値となり、相対速度BINについても第1測定モード、第2測定モードともに同一の値を有する。つまり、第1測定モード、第2測定モードにおいて、距離BIN、相対速度BINがともに一致するピークに対応した物標が、電磁ノイズによる疑似物標である、と判定することができる。
比較として、第1測定モードと第2測定モードのチャープ周期が異なる場合の信号処理結果を図12に示す。
図12に示すような場合、電磁ノイズによる疑似物標は、ビート周波数に対応する電磁ノイズの周波数が同一のため距離BINは同一の値となるが、電磁ノイズに対応するドップラ周波数は各測定モードのチャープ周期と電磁のノイズ周波数で決まる値となるため、2つの測定モード間で必ずしも一致しない。
つまり、電磁ノイズの周波数が未知である場合、各測定モードにおける電磁ノイズによる疑似物標のドップラ周波数の対応関係も未知となり、ビート周波数とドップラ周波数を用いた電磁ノイズによる疑似物標の判定基準が規定できない。
また、ビート周波数の一致のみで誤検出を判定した場合、電磁ノイズと同一のビート周波数を有する真の物標2との区別ができず、真の物標2を誤って電磁ノイズによる疑似物標と判定してしまう可能性がある。
よって、電磁ノイズによる疑似物標の判定を実施するためには、同一のチャープ周期の測定モードを用いることが必須となる。
図12に示すような場合、電磁ノイズによる疑似物標は、ビート周波数に対応する電磁ノイズの周波数が同一のため距離BINは同一の値となるが、電磁ノイズに対応するドップラ周波数は各測定モードのチャープ周期と電磁のノイズ周波数で決まる値となるため、2つの測定モード間で必ずしも一致しない。
つまり、電磁ノイズの周波数が未知である場合、各測定モードにおける電磁ノイズによる疑似物標のドップラ周波数の対応関係も未知となり、ビート周波数とドップラ周波数を用いた電磁ノイズによる疑似物標の判定基準が規定できない。
また、ビート周波数の一致のみで誤検出を判定した場合、電磁ノイズと同一のビート周波数を有する真の物標2との区別ができず、真の物標2を誤って電磁ノイズによる疑似物標と判定してしまう可能性がある。
よって、電磁ノイズによる疑似物標の判定を実施するためには、同一のチャープ周期の測定モードを用いることが必須となる。
ステップST26において、判定部24は、電磁ノイズによる疑似物標の判定処理の結果、電磁ノイズによる疑似物標があるか否かを判定し、電磁ノイズによる疑似物標がなければ、ステップST28において、物標検出部25は、第1測定モードでの信号処理結果および第2測定モードでの信号処理結果を用いて物標情報を生成し、出力する。
また、ステップST26にて電磁ノイズによる疑似物標があると判定された場合、ステップST27において、第1測定モードおよび第2測定モードの信号処理結果から、電磁ノイズによる疑似物標に対応する情報を除去したのちに、ステップST28において、物標検出部25は、物標情報を生成し出力する。
なお、ステップST27での電磁ノイズによる疑似物標の処理では、電磁ノイズによる疑似物標に対応する情報を除去する代わりに、電磁ノイズによる疑似物標と判定された物標に対して信頼度が低いという情報を付与してもよい。
あるいは、電磁ノイズによる疑似物標が存在すると判定された場合に、物標検出部25が、電磁ノイズの混入を報知する情報をレーダ装置1の外部に出力してもよい。
また、ステップST26にて電磁ノイズによる疑似物標があると判定された場合、ステップST27において、第1測定モードおよび第2測定モードの信号処理結果から、電磁ノイズによる疑似物標に対応する情報を除去したのちに、ステップST28において、物標検出部25は、物標情報を生成し出力する。
なお、ステップST27での電磁ノイズによる疑似物標の処理では、電磁ノイズによる疑似物標に対応する情報を除去する代わりに、電磁ノイズによる疑似物標と判定された物標に対して信頼度が低いという情報を付与してもよい。
あるいは、電磁ノイズによる疑似物標が存在すると判定された場合に、物標検出部25が、電磁ノイズの混入を報知する情報をレーダ装置1の外部に出力してもよい。
以上のように、本実施の形態では、異なるチャープ傾きを有し、かつ、同一のチャープ周期を有する2つの測定モードのレーダ信号を周期的に交互に送受信し、それぞれの測定モードでの信号処理結果において、ビート周波数とドップラ周波数が一致するピークに対応する物標のペアを、電磁ノイズによる疑似物標と判定する判定部24を備えるように、レーダ装置を構成した。
これにより、FCM方式のレーダ装置において、電磁シールド等のハードウェア対策を施すことなく、レーダの信号処理のみで電磁ノイズによる疑似物標の判別や除去を実施できる効果を奏する。
これにより、FCM方式のレーダ装置において、電磁シールド等のハードウェア対策を施すことなく、レーダの信号処理のみで電磁ノイズによる疑似物標の判別や除去を実施できる効果を奏する。
実施の形態2.
実施の形態1では、2つの測定モードでの信号処理結果において、ビート周波数とドップラ周波数が一致するピークに対応する物標のペアを、電磁ノイズによる疑似物標と判定する判定部24を備えたレーダ装置について説明した。
本実施の形態では、この判定部24における電磁ノイズによる疑似物標の判定を、距離速度算出部23が出力する距離と相対速度の情報を用いて行う場合のレーダ装置について説明する。
実施の形態1では、2つの測定モードでの信号処理結果において、ビート周波数とドップラ周波数が一致するピークに対応する物標のペアを、電磁ノイズによる疑似物標と判定する判定部24を備えたレーダ装置について説明した。
本実施の形態では、この判定部24における電磁ノイズによる疑似物標の判定を、距離速度算出部23が出力する距離と相対速度の情報を用いて行う場合のレーダ装置について説明する。
本実施の形態におけるレーダ装置の構成図を図1と同一であり、信号処理部22の判定部24における電磁ノイズによる疑似物標の判定処理方法が異なる。
図13は本実施の形態におけるレーダ装置の信号処理部22の処理手順を示すフローチャートである。
なお、図13において、図9と同一符号は、同一または相当部分を示すので説明を省略する。
ステップST85では、判定部24が、第2測定モードに対する信号処理完了後、第1測定モードと第2測定モードそれぞれの算出結果をメモリから取得する。
その後、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、距離Rと相対速度vの比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う
具体的には、2つの測定モードにおいて、相対速度値が一致する物標を比較し、第2測定モードの距離値R2が、第1の測定モードの距離値R1に対して第1のチャープ傾きと第2のチャープ傾きの比(S1/S2)を乗算した値と一致する物標のペアを、電磁ノイズによる疑似物標であると判定する。
図13は本実施の形態におけるレーダ装置の信号処理部22の処理手順を示すフローチャートである。
なお、図13において、図9と同一符号は、同一または相当部分を示すので説明を省略する。
ステップST85では、判定部24が、第2測定モードに対する信号処理完了後、第1測定モードと第2測定モードそれぞれの算出結果をメモリから取得する。
その後、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、距離Rと相対速度vの比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う
具体的には、2つの測定モードにおいて、相対速度値が一致する物標を比較し、第2測定モードの距離値R2が、第1の測定モードの距離値R1に対して第1のチャープ傾きと第2のチャープ傾きの比(S1/S2)を乗算した値と一致する物標のペアを、電磁ノイズによる疑似物標であると判定する。
図14は、レーダ装置1に対して近距離にある真の物標1と、レーダ装置1から遠方の距離にある真の物標2と、電磁ノイズによる疑似物標が混在している環境における、第1測定モード(図左)と第2測定モード(図右)のそれぞれの距離速度算出処理とその結果(レンジドップラーマップ)を示したものである。
真の物標1は、近距離に存在するため第1測定モードと第2測定モードの両方で検出され、真の物標1の距離値と相対速度値は第1測定モード、第2測定モードともに同一の値となる。真の物標2は遠距離に存在するため第1測定モードの検出範囲外にあり、第2測定モードのみで観測されている。
真の物標1は、近距離に存在するため第1測定モードと第2測定モードの両方で検出され、真の物標1の距離値と相対速度値は第1測定モード、第2測定モードともに同一の値となる。真の物標2は遠距離に存在するため第1測定モードの検出範囲外にあり、第2測定モードのみで観測されている。
電磁ノイズによる疑似物標の相対速度値は、第1測定モードと第2測定モードでチャープ周期が同一であるため、電磁ノイズに対応したドップラ周波数は同一の値となることから、第1測定モード、第2測定モードともに同一の値を有する。
一方で、電磁ノイズによる疑似物標の距離値は、電磁ノイズの周波数Fn_rを式(3)のビート周波数Fsb_rに代入して得られる値となるため、チャープ傾きがそれぞれ異なる第1測定モードと第2測定モードでは異なる値をとる。
一方で、電磁ノイズによる疑似物標の距離値は、電磁ノイズの周波数Fn_rを式(3)のビート周波数Fsb_rに代入して得られる値となるため、チャープ傾きがそれぞれ異なる第1測定モードと第2測定モードでは異なる値をとる。
電磁ノイズの周波数Fn_rが一定である場合、第1測定モードにおける電磁ノイズによる疑似物標の距離値Rn1と、第2測定モードの電磁ノイズによる疑似物標の距離値Rn2の関係は、第1測定モードのチャープ傾きS1と第2測定モードのチャープ傾きS2を用いて以下の式(5)で表される。

これより、第1測定モードと第2測定モードにおいて、相対速度値が一致する物標について、第2測定モードでの物標の距離値が、第1測定モードでの物標の距離値にS1/S2を乗算した値に一致する物標のペアが、電磁ノイズによる疑似物標である、と判定することができる。
以上のように、本実施の形態では、異なるチャープ傾きを有し、かつ、同一のチャープ周期を有する2つの測定モードのレーダ信号を周期的に交互に送受信し、それぞれの測定モードでの信号処理結果において、相対速度値が一致する物標を比較し、第2測定モードの距離値が、第1の測定モードの距離値に対して第1のチャープ傾きと第2のチャープ傾きの比(S1/S2)を乗算した値と一致する物標のペアを、電磁ノイズによる疑似物標であると判定する判定部24を備えるように、レーダ装置1を構成した。
これにより、各測定モードの距離と相対速度の算出結果のみを用いて電磁ノイズによる疑似物標を判別できる効果を奏する。
これにより、各測定モードの距離と相対速度の算出結果のみを用いて電磁ノイズによる疑似物標を判別できる効果を奏する。
実施の形態3.
実施の形態2では、第1測定モードと第2測定モードとを有する場合について説明したが、本実施の形態では、更に第3測定モードを追加し、真の物標と電磁ノイズによる疑似物標が重なった場合の誤判定を防止する、レーダ装置について説明する。
なお、各測定モードにおける信号処理については、実施の形態1、2と同一のため説明を省略する。
実施の形態2では、第1測定モードと第2測定モードとを有する場合について説明したが、本実施の形態では、更に第3測定モードを追加し、真の物標と電磁ノイズによる疑似物標が重なった場合の誤判定を防止する、レーダ装置について説明する。
なお、各測定モードにおける信号処理については、実施の形態1、2と同一のため説明を省略する。
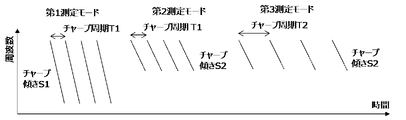
図15は、本実施の形態に係る各測定モードのレーダ信号である。本実施の形態では、3つ測定モードのレーダ信号を周期的に繰り返して送信する。
第1測定モードと第2測定モードの関係は、実施の形態1、2と同一で、第1測定モードはチャープ傾きS1、チャープ周期はT1であり、第2測定モードではチャープ傾きは第1測定モードと異なるS2、チャープ周期は第1測定モードと同一のT1である。
第3測定モードは、チャープ傾きが第2測定モードと同一のS2であり、チャープ周期が第1、第2測定モードと異なるT2に設定する。この第3測定モードで用いるレーダ信号を第3の周波数変調信号と呼ぶ。
第1測定モードと第2測定モードの関係は、実施の形態1、2と同一で、第1測定モードはチャープ傾きS1、チャープ周期はT1であり、第2測定モードではチャープ傾きは第1測定モードと異なるS2、チャープ周期は第1測定モードと同一のT1である。
第3測定モードは、チャープ傾きが第2測定モードと同一のS2であり、チャープ周期が第1、第2測定モードと異なるT2に設定する。この第3測定モードで用いるレーダ信号を第3の周波数変調信号と呼ぶ。
次に、本実施の形態における信号処理部22の電磁ノイズによる疑似物標の判定処理について説明する。
図16は、本実施の形態におけるレーダ装置の信号処理部22の処理手順を示すフローチャートである。
なお、図16において、図13と同一符号は、同一または相当部分を示すので説明を省略する。
ステップST35では、信号処理部22が、第3測定モードでのビート信号のデジタルデータをビート信号生成部18から取得する。
ステップST36では、距離速度算出部23が、第3測定モードで取得したデジタルデータに対して距離速度情報の算出処理を行い、算出結果をメモリに格納する
ステップST37では、判定部24が、第3測定モードに対する信号処理完了後、第1測定モード、第2測定モードおよび第3測定モードの算出結果をメモリから取得する。
その後、判定部24は、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、距離Rと相対速度vの比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う。
図16は、本実施の形態におけるレーダ装置の信号処理部22の処理手順を示すフローチャートである。
なお、図16において、図13と同一符号は、同一または相当部分を示すので説明を省略する。
ステップST35では、信号処理部22が、第3測定モードでのビート信号のデジタルデータをビート信号生成部18から取得する。
ステップST36では、距離速度算出部23が、第3測定モードで取得したデジタルデータに対して距離速度情報の算出処理を行い、算出結果をメモリに格納する
ステップST37では、判定部24が、第3測定モードに対する信号処理完了後、第1測定モード、第2測定モードおよび第3測定モードの算出結果をメモリから取得する。
その後、判定部24は、それぞれの測定モードの2次元スペクトルにおけるピーク値に対応した、距離Rと相対速度vの比較を行い、各ピーク値に対応した物標が電磁ノイズによる疑似物標か否かの判定を行う。
判定部24によって行われるステップST37での処理について、詳細に説明する。
図17は、ステップST37で実行される、電磁ノイズによる疑似物標の判定処理のフローチャートである。
電磁ノイズによる疑似物標を抽出する方法は、実施の形態2と同じである。
ステップST51では、2つの測定モード(第1の測定モードと第2の測定モード)において、相対速度値が一致する物標の情報を取得する。
ステップST52では、第2測定モードの距離値R2が、第1の測定モードの距離値R1に対して第1のチャープ傾きと第2のチャープ傾きの比(S1/S2)を乗算した値と一致する物標のペアが存在するかどうかを判定する。
全ての物標が電磁ノイズによる疑似物標でないと判定された場合、ステップST37の処理を終了し、図16のステップST26に移行する。
図17は、ステップST37で実行される、電磁ノイズによる疑似物標の判定処理のフローチャートである。
電磁ノイズによる疑似物標を抽出する方法は、実施の形態2と同じである。
ステップST51では、2つの測定モード(第1の測定モードと第2の測定モード)において、相対速度値が一致する物標の情報を取得する。
ステップST52では、第2測定モードの距離値R2が、第1の測定モードの距離値R1に対して第1のチャープ傾きと第2のチャープ傾きの比(S1/S2)を乗算した値と一致する物標のペアが存在するかどうかを判定する。
全ての物標が電磁ノイズによる疑似物標でないと判定された場合、ステップST37の処理を終了し、図16のステップST26に移行する。
一方、ステップST53では、ステップST52の条件を満たす物標のペアが存在する場合、当該の物標のペアのうち第2測定モードの物標を抽出するとともに、第3測定モードの2次元スペクトルにおけるピーク値に対応した物標との情報を取得する。
次に、ステップST54では、ステップST53で取得した第3測定モードの2次元スペクトルにおけるピーク値に対応した物標との情報について、ステップST52の条件を満たす第2測定モードの物標と第3測定モードの物標間で距離値と相対速度値が一致するか否かの比較を行う。
つまり、第2測定モードの物標の距離R2、相対速度v2と、第3測定モードの物標の距離R3、相対速度v3について、R2=R3、かつv2=v3となる物標が第3測定モードの信号処理結果に存在するかどうかを判定する。
次に、ステップST54では、ステップST53で取得した第3測定モードの2次元スペクトルにおけるピーク値に対応した物標との情報について、ステップST52の条件を満たす第2測定モードの物標と第3測定モードの物標間で距離値と相対速度値が一致するか否かの比較を行う。
つまり、第2測定モードの物標の距離R2、相対速度v2と、第3測定モードの物標の距離R3、相対速度v3について、R2=R3、かつv2=v3となる物標が第3測定モードの信号処理結果に存在するかどうかを判定する。
ステップST55では、ST54の条件を満たす物標が第3測定モードに存在する場合、ST52において電磁ノイズによる疑似物標と判定した物標のペアのうち、ST54の条件を満たす物標を含むペアを電磁ノイズによる疑似物標の判定対象から除外し、残りのペアを電磁ノイズによる疑似物標と判定する。
ステップST56では、ST54の条件を満たす物標が存在しない場合、ST52の条件を満たす全ての物標のペアを、電磁ノイズによる疑似物標であると判定し、処理を終了する。
ステップST56では、ST54の条件を満たす物標が存在しない場合、ST52の条件を満たす全ての物標のペアを、電磁ノイズによる疑似物標であると判定し、処理を終了する。
図18は、レーダ装置1に対して近距離にある真の物標1と、レーダ装置1から遠方の距離にある真の物標2と、電磁ノイズによる疑似物標が混在している環境における、第2測定モード(図18の左側)と第3測定モード(図18の右側)のそれぞれの距離速度算出処理とその結果(レンジドップラーマップ)を示したものである。
第2測定モード、第3測定モードともに、真の物標1、真の物標2、電磁ノイズによる疑似物標が検出されている。
第2測定モード、第3測定モードともに、真の物標1、真の物標2、電磁ノイズによる疑似物標が検出されている。
真の物標は、測定モード間で距離値と相対速度値がともに一致するのに対し、電磁ノイズによる疑似物標では、第2測定モードと第3測定モードでチャープ周期のみが異なるため、ドップラ周波数が異なる値に積算され、測定モード間で相対速度値のみ異なる値をとる。よって、ST52で判定した電磁ノイズによる疑似物標に対して、第2測定モードと第3測定モードで距離値と相対速度値がともに一致する物標に対応したものを、電磁ノイズによる疑似物標の判定対象から除外することで、異なる真の物標が偶然電磁ノイズによる疑似物標の判定条件を満たす場合に、誤って電磁ノイズによる疑似物標であると判定することを防止できる。
以上のように、本実施の形態では、実施の形態2に対して第2測定モードと同一のチャープ傾きを有し、異なるチャープ周期を有する第3測定モードを追加した。
そして、第1測定モードと第2測定モードの信号処理結果にて判定した電磁ノイズによる疑似物標のペアのうち、第2測定モードの物標を抽出し、距離値と相対速度値がともに一致する物標が第3測定モードに存在する場合に、当該の物標を含む第1測定モードと第2測定モードの物標のペアを、電磁ノイズによる疑似物標の判定対象から除外する判定部24を備えるように、レーダ装置1を構成した。
これにより、第1測定モードと第2測定モードにおいて、異なる真の物標が偶然電磁ノイズによる疑似物標の判定条件を満たす距離と相対速度の関係を有していた場合に、誤って電磁ノイズによる疑似物標であると判定することを防止できる。
そして、第1測定モードと第2測定モードの信号処理結果にて判定した電磁ノイズによる疑似物標のペアのうち、第2測定モードの物標を抽出し、距離値と相対速度値がともに一致する物標が第3測定モードに存在する場合に、当該の物標を含む第1測定モードと第2測定モードの物標のペアを、電磁ノイズによる疑似物標の判定対象から除外する判定部24を備えるように、レーダ装置1を構成した。
これにより、第1測定モードと第2測定モードにおいて、異なる真の物標が偶然電磁ノイズによる疑似物標の判定条件を満たす距離と相対速度の関係を有していた場合に、誤って電磁ノイズによる疑似物標であると判定することを防止できる。
1 レーダ装置、11 レーダ信号出力部、12 出力制御部、13 信号源、14 分配器、15 送受信部、16 送信アンテナ、17 受信アンテナ、18 ビート信号生成部、19 周波数混合部、20 フィルタ、21 ADC、22 信号処理部、23 距離速度算出部、24 判定部、25 物標検出部、31 距離速度算出回路、33 判定回路、34 物標検出回路、41 プロセッサ、42 メモリ、51 第1のスペクトル算出部、52 第2のスペクトル算出部、53 第3のスペクトル算出部。
Claims (3)
- 周波数変調信号を繰り返し出力するレーダ信号出力部と、
前記周波数変調信号を物標に向けて送信するとともに前記物標からの反射波を受信する送受信部と、
前記周波数変調信号の周波数と、前記反射波の周波数との差分の周波数を有するビート信号を生成し、デジタルデータに変換するビート信号生成部と、
前記デジタルデータを用いて、前記物標との距離に対応するビート周波数と、前記物標との相対速度に対応するドップラ周波数を算出し、前記物標の距離と相対速度を検出する信号処理部とを備え、
前記レーダ信号出力部は、予め設定された第1のチャープ傾きで周波数が変化し、予め設定された第1のチャープ周期で繰り返す第1の周波数変調信号と、前記第1のチャープ傾きとは異なる第2のチャープ傾きで周波数が変化し、前記第1のチャープ周期で繰り返す第2の周波数変調信号を出力し、
前記信号処理部は、前記第1の周波数変調信号における前記物標のビート周波数と前記第2の周波数変調信号における前記物標のビート周波数とが一致するとともに、前記第2の周波数変調信号における前記物標のドップラ周波数と前記第2の周波数変調信号における前記物標のドップラ周波数とが一致した場合、前記第1の周波数変調信号における前記物標及び前記第2の周波数変調信号における前記物標を疑似物標と判定するレーダ装置。 - 前記信号処理部は、前記第1の周波数変調信号における前記物標の相対速度と前記第2の周波数変調信号における前記物標の相対速度とが一致するとともに、前記第2の周波数変調信号における前記物標の距離が、前記第1の周波数変調信号における前記物標の距離に対し、前記第1チャープ傾きと前記第2チャープ傾きとの比を乗算した値と一致した場合、前記第1の周波数変調信号における前記物標及び前記第2の周波数変調信号における前記物標を疑似物標と判定する請求項1に記載のレーダ装置。
- 前記レーダ信号出力部は、前記第2のチャープ傾きで周波数が変化し、前記第1のチャープ周期とは異なる第2のチャープ周期で繰り返す第3の周波数変調信号を出力し、
前記信号処理部は、前記第1の周波数変調信号及び前記第2の周波数変調信号で疑似物標であると判定した前記物標のうち、前記第2の周波数変調信号における前記物標の距離と前記第3の周波数変調信号における前記物標の距離とが一致するとともに、前記第2の周波数変調信号における前記物標の相対速度と前記第3の周波数変調信号における前記物標の相対速度とが一致した場合、前記疑似物標と判定した前記第1の周波数変調信号における前記物標及び前記第2の周波数変調信号における前記物標は、真の物標であると判定する請求項1または請求項2に記載のレーダ装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/012652 WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
| DE112022000734.6T DE112022000734T5 (de) | 2021-03-25 | 2022-03-24 | Radareinrichtung |
| PCT/JP2022/014039 WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
| JP2023509306A JP7345703B2 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
| CN202280022683.3A CN116997815A (zh) | 2021-03-25 | 2022-03-24 | 雷达装置 |
| US18/217,867 US20230350012A1 (en) | 2021-03-25 | 2023-07-03 | Radar device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/012652 WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2022201455A1 true WO2022201455A1 (ja) | 2022-09-29 |
Family
ID=83395476
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/012652 WO2022201455A1 (ja) | 2021-03-25 | 2021-03-25 | レーダ装置 |
| PCT/JP2022/014039 WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2022/014039 WO2022203006A1 (ja) | 2021-03-25 | 2022-03-24 | レーダ装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20230350012A1 (ja) |
| JP (1) | JP7345703B2 (ja) |
| CN (1) | CN116997815A (ja) |
| DE (1) | DE112022000734T5 (ja) |
| WO (2) | WO2022201455A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115641729B (zh) * | 2022-12-07 | 2023-09-22 | 创辉达设计股份有限公司 | 一种高速行驶车辆信息抽取方法及系统 |
| CN117310639A (zh) * | 2023-09-05 | 2023-12-29 | 苏州承泰科技有限公司 | 一种应用于毫米波雷达的杂散识别方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150002332A1 (en) * | 2013-06-28 | 2015-01-01 | Robert Bosch Gmbh | Radar sensor and method for operating a radar sensor |
| JP2017090143A (ja) * | 2015-11-06 | 2017-05-25 | 富士通テン株式会社 | レーダ装置、レーダ装置用の信号処理装置及び信号処理方法 |
| JP2019184370A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社Soken | レーダシステム |
| JP6797334B1 (ja) * | 2020-02-21 | 2020-12-09 | 三菱電機株式会社 | レーダ装置、観測対象検出方法および車載装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5382087B2 (ja) * | 2011-11-02 | 2014-01-08 | 株式会社デンソー | レーダ装置 |
| WO2020165952A1 (ja) * | 2019-02-12 | 2020-08-20 | 三菱電機株式会社 | レーダ装置、観測対象検出方法及び車載装置 |
-
2021
- 2021-03-25 WO PCT/JP2021/012652 patent/WO2022201455A1/ja active Application Filing
-
2022
- 2022-03-24 JP JP2023509306A patent/JP7345703B2/ja active Active
- 2022-03-24 CN CN202280022683.3A patent/CN116997815A/zh active Pending
- 2022-03-24 WO PCT/JP2022/014039 patent/WO2022203006A1/ja active Application Filing
- 2022-03-24 DE DE112022000734.6T patent/DE112022000734T5/de active Pending
-
2023
- 2023-07-03 US US18/217,867 patent/US20230350012A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20150002332A1 (en) * | 2013-06-28 | 2015-01-01 | Robert Bosch Gmbh | Radar sensor and method for operating a radar sensor |
| JP2017090143A (ja) * | 2015-11-06 | 2017-05-25 | 富士通テン株式会社 | レーダ装置、レーダ装置用の信号処理装置及び信号処理方法 |
| JP2019184370A (ja) * | 2018-04-06 | 2019-10-24 | 株式会社Soken | レーダシステム |
| JP6797334B1 (ja) * | 2020-02-21 | 2020-12-09 | 三菱電機株式会社 | レーダ装置、観測対象検出方法および車載装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2022203006A1 (ja) | 2022-09-29 |
| US20230350012A1 (en) | 2023-11-02 |
| CN116997815A (zh) | 2023-11-03 |
| DE112022000734T5 (de) | 2023-11-16 |
| JP7345703B2 (ja) | 2023-09-15 |
| WO2022203006A1 (ja) | 2022-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1619519B1 (en) | FM-CW radar system | |
| US7460058B2 (en) | Radar | |
| US7791532B2 (en) | Radar | |
| US7187321B2 (en) | Interference determination method and FMCW radar using the same | |
| US6888494B2 (en) | FMCW radar system | |
| EP0777133B1 (en) | FM-CW radar apparatus for measuring relative speed of and distance to an object | |
| JP3788322B2 (ja) | レーダ | |
| US7714771B2 (en) | Method and device for measuring the distance and relative speed of multiple objects | |
| JP3489514B2 (ja) | Fmcwレーダ装置 | |
| WO2022203006A1 (ja) | レーダ装置 | |
| JP2002168947A (ja) | Fm−cwレーダ装置 | |
| JP6797334B1 (ja) | レーダ装置、観測対象検出方法および車載装置 | |
| JP2008267949A (ja) | レーダ装置 | |
| US6825799B2 (en) | Radar apparatus equipped with abnormality detection function | |
| JP5693906B2 (ja) | レーダ装置 | |
| JP5564244B2 (ja) | 観測信号処理装置 | |
| KR102126071B1 (ko) | 레이더를 이용한 목표물 탐지 방법 및 장치 | |
| JPH0777575A (ja) | レーダ装置 | |
| JP2003329764A (ja) | パルスレーダ装置 | |
| WO2023062803A1 (ja) | レーダ装置及びレーダ装置の干渉対策検出方法 | |
| US20220390584A1 (en) | Radar signal processing device, radar signal processing method, radar device, and in-vehicle device | |
| JP5586217B2 (ja) | レーダ装置 | |
| JP2003270330A (ja) | 物体検知装置 | |
| JP2000081481A (ja) | 電波式距離計 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21933061 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 21933061 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |