WO2021085101A1 - 管理システム、管理方法、及び管理プログラム - Google Patents
管理システム、管理方法、及び管理プログラム Download PDFInfo
- Publication number
- WO2021085101A1 WO2021085101A1 PCT/JP2020/038492 JP2020038492W WO2021085101A1 WO 2021085101 A1 WO2021085101 A1 WO 2021085101A1 JP 2020038492 W JP2020038492 W JP 2020038492W WO 2021085101 A1 WO2021085101 A1 WO 2021085101A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- communication
- center
- information
- autonomous driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096708—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control
- G08G1/096725—Systems involving transmission of highway information, e.g. weather, speed limits where the received information might be used to generate an automatic action on the vehicle control where the received information generates an automatic action on the vehicle control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/20—Monitoring the location of vehicles belonging to a group, e.g. fleet of vehicles, countable or determined number of vehicles
- G08G1/205—Indicating the location of the monitored vehicles as destination, e.g. accidents, stolen, rental
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/227—Handing over between remote control and on-board control; Handing over between remote control arrangements
- G05D1/2274—Handing over between remote control and on-board control; Handing over between remote control arrangements in response to the communication link being lost, degraded or compromised, e.g. anti-spoofing
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0018—Planning or execution of driving tasks specially adapted for safety by employing degraded modes, e.g. reducing speed, in response to suboptimal conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
- B60W60/0015—Planning or execution of driving tasks specially adapted for safety
- B60W60/0018—Planning or execution of driving tasks specially adapted for safety by employing degraded modes, e.g. reducing speed, in response to suboptimal conditions
- B60W60/00184—Planning or execution of driving tasks specially adapted for safety by employing degraded modes, e.g. reducing speed, in response to suboptimal conditions related to infrastructure
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/20—Control system inputs
- G05D1/22—Command input arrangements
- G05D1/221—Remote-control arrangements
- G05D1/226—Communication links with the remote-control arrangements
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0108—Measuring and analyzing of parameters relative to traffic conditions based on the source of data
- G08G1/0112—Measuring and analyzing of parameters relative to traffic conditions based on the source of data from the vehicle, e.g. floating car data [FCD]
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0125—Traffic data processing
- G08G1/0133—Traffic data processing for classifying traffic situation
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/0104—Measuring and analyzing of parameters relative to traffic conditions
- G08G1/0137—Measuring and analyzing of parameters relative to traffic conditions for specific applications
- G08G1/0145—Measuring and analyzing of parameters relative to traffic conditions for specific applications for active traffic flow control
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/09—Arrangements for giving variable traffic instructions
- G08G1/0962—Arrangements for giving variable traffic instructions having an indicator mounted inside the vehicle, e.g. giving voice messages
- G08G1/0967—Systems involving transmission of highway information, e.g. weather, speed limits
- G08G1/096766—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission
- G08G1/096775—Systems involving transmission of highway information, e.g. weather, speed limits where the system is characterised by the origin of the information transmission where the origin of the information is a central station
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/123—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams
- G08G1/127—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station
- G08G1/13—Traffic control systems for road vehicles indicating the position of vehicles, e.g. scheduled vehicles; Managing passenger vehicles circulating according to a fixed timetable, e.g. buses, trains, trams to a central station ; Indicators in a central station the indicator being in the form of a map
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W16/00—Network planning, e.g. coverage or traffic planning tools; Network deployment, e.g. resource partitioning or cells structures
- H04W16/18—Network planning tools
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W24/00—Supervisory, monitoring or testing arrangements
- H04W24/08—Testing, supervising or monitoring using real traffic
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/02—Services making use of location information
- H04W4/029—Location-based management or tracking services
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W4/00—Services specially adapted for wireless communication networks; Facilities therefor
- H04W4/30—Services specially adapted for particular environments, situations or purposes
- H04W4/40—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P]
- H04W4/44—Services specially adapted for particular environments, situations or purposes for vehicles, e.g. vehicle-to-pedestrians [V2P] for communication between vehicles and infrastructures, e.g. vehicle-to-cloud [V2C] or vehicle-to-home [V2H]
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W76/00—Connection management
- H04W76/10—Connection setup
- H04W76/19—Connection re-establishment
Definitions
- This disclosure relates to management systems, management methods, and management programs.
- the remote monitoring center determines whether or not the autonomous driving vehicle can be restarted based on the received camera image, and the autonomous driving vehicle is determined. When it is determined that the driving of the vehicle may be resumed, a start signal is transmitted to the autonomous driving vehicle.
- Patent Document 1 As a result of detailed examination by the inventor, in the technique disclosed in Patent Document 1, the operation of the autonomous driving vehicle is stopped every time the communication between the autonomous driving vehicle and the remote monitoring center is interrupted. The issue was found that the continuity of support services was impaired.
- the inventor includes an operator, a local staff, etc. who support the autonomous driving vehicle in the autonomous driving support service every time the communication between the autonomous driving vehicle and the remote monitoring center is interrupted.
- the purpose of this disclosure is to suppress the decrease in the continuity of the automatic driving support service and to suppress the increase in the cost spent on the automatic driving support service.
- the management system is a management system for managing the vehicle state of the autonomous driving vehicle by periodically communicating with the autonomous driving vehicle in which the autonomous driving support center automatically travels, and is provided in the autonomous driving vehicle.
- communication with the autonomous driving support center is interrupted, communication between the autonomous driving support center and the autonomous driving vehicle at each position in the management target area by the management system where the autonomous driving vehicle can travel.
- a vehicle-side device provided with a vehicle-side determination unit that determines whether or not to continue automatic driving based on communication status information, which is information indicating the status of the vehicle, and the autonomous driving vehicle provided in the autonomous driving support center. Includes a center-side device provided with a center-side decision unit that determines whether or not to contact a supporter who provides support for the autonomous driving vehicle based on the communication status information when communication with the self-driving car is interrupted. Can be configured with.
- the management method according to the present disclosure is a management method used in a management system that manages the vehicle state of the autonomous driving vehicle by periodically communicating with the autonomous driving vehicle in which the autonomous driving support center automatically travels.
- the autonomous driving support center and the autonomous driving vehicle at each position in the management target area by the management system where the autonomous driving vehicle can travel.
- the communication status information which is the information indicating the communication status between the two, it is a method of deciding whether to continue the autonomous driving and whether to contact the supporter who supports the autonomous driving vehicle. is there.
- the management program according to the present disclosure is a management program used in a management system that manages the vehicle state of the autonomous driving vehicle by periodically communicating with the autonomous driving vehicle that the autonomous driving support center automatically travels.
- the autonomous driving support center and the autonomous driving vehicle at each position in the management target area by the management system where the autonomous driving vehicle can travel.
- the communication status information which is information indicating the communication status between the two, it is determined whether to continue the autonomous driving and whether to contact the supporter who supports the autonomous driving vehicle. Is a program for making a computer execute.
- management system management method, and management program according to the present disclosure, it is possible to suppress a decrease in the continuity of the automatic driving support service and suppress an increase in the cost spent on the automatic driving support service.
- the drawing is as follows. It is a block diagram which shows an example of the hardware configuration of the management system which concerns on 1st to 3rd Embodiment. It is a block diagram which shows an example of the functional structure of the management system which concerns on 1st to 3rd Embodiment. It is a schematic diagram which shows an example of the structure of the communication status information database which concerns on embodiment. It is a top view provided for the explanation of the communication record information included in the communication status information database which concerns on embodiment. It is a top view provided for the explanation of the unstable area information included in the communication situation information database which concerns on embodiment.
- the management system 90 according to the present embodiment manages the vehicle state of the autonomous driving vehicle by periodically communicating with the autonomous driving vehicle in which the autonomous driving support center automatically travels.
- the management system 90 according to the present embodiment includes a center-side device 10, a plurality of vehicle-side devices 20, a plurality of mobile terminals 40, and a plurality of mobile terminals 40, each of which can access the network 80.
- the operator device 50 and the like are included.
- Examples of the center-side device 10, the vehicle-side device 20, and the operator device 50 include general-purpose information processing devices such as personal computers and server computers.
- examples of the mobile terminal 40 include a portable terminal such as a smartphone, a tablet terminal, a PDA (Personal Digital Assistant, a mobile information terminal), a notebook type personal computer, and a terminal capable of wireless communication.
- the center-side device 10 is a device managed by the automatic driving support center that operates the management system 90.
- the center-side device 10 includes a CPU (Central Processing Unit) 11, a memory 12 as a temporary storage area, a non-volatile storage unit 13, an input unit 14 such as a keyboard and a mouse, a display unit 15 such as a liquid crystal display, and a medium reading / writing device (a medium reading / writing device). It includes an R / W) 16 and a communication interface (I / F) unit 18.
- the CPU 11, the memory 12, the storage unit 13, the input unit 14, the display unit 15, the medium reading / writing device 16, and the communication I / F unit 18 are connected to each other via the bus B1.
- the medium reading / writing device 16 reads out the information written on the recording medium 17 and writes the information on the recording medium 17.
- the storage unit 13 is realized by an HDD (Hard Disk Drive), an SSD (Solid State Drive), a flash memory, or the like.
- the center-side communication program 13A, the communication status information transmission program 13B, and the center-side communication interruption program 13C are stored in the storage unit 13 as a storage medium.
- the recording medium 17 on which the center-side communication program 13A, the communication status information transmission program 13B, and the center-side communication interruption program 13C are written reads and writes media.
- the CPU 11 reads the center side communication program 13A, the communication status information transmission program 13B, and the center side communication interruption program 13C from the storage unit 13 and deploys them in the memory 12, and deploys the center side communication program 13A, the communication status information transmission program 13B, and the center side.
- the processes of the communication interruption program 13C are sequentially executed.
- the communication status information database 13D is stored in the storage unit 13. The details of the communication status information database 13D will be described later.
- the vehicle-side device 20 is a device mounted on each of the autonomous driving vehicles that use the autonomous driving support service.
- the vehicle-side device 20 includes a CPU 21, a memory 22 as a temporary storage area, a non-volatile storage unit 23, an input unit 24 such as a keyboard and a mouse, a display unit 25 such as a liquid crystal display, a medium reading / writing device 26, a wireless communication unit 28, and the like.
- a position detection unit 29 is provided.
- the CPU 21, the memory 22, the storage unit 23, the input unit 24, the display unit 25, the medium reading / writing device 26, the wireless communication unit 28, and the position detection unit 29 are connected to each other via the bus B2.
- the medium reading / writing device 26 reads out the information written on the recording medium 27 and writes the information on the recording medium 27.
- the storage unit 23 is realized by an HDD, SSD, flash memory, or the like.
- the vehicle-side communication program 23A, the communication status information receiving program 23B, and the vehicle-side communication interruption program 23C are stored in the storage unit 23 as a storage medium.
- the recording medium 27 in which the vehicle-side communication program 23A, the communication status information reception program 23B, and the vehicle-side communication interruption program 23C are written is set in the medium read / write device 26, and the medium read / write device 26 is the vehicle-side communication program 23A from the recording medium 27.
- the CPU 21 reads the vehicle-side communication program 23A, the communication status information receiving program 23B, and the vehicle-side communication interruption program 23C from the storage unit 23 and deploys them in the memory 22, and deploys the vehicle-side communication program 23A, the communication status information receiving program 23B, and the vehicle-side communication program 23B.
- the processes included in the communication interruption program 23C are sequentially executed.
- the position detection unit 29 detects the position of the mounted autonomous vehicle, and in the present embodiment, the GPS (Global Positioning System) device is applied, but the present invention is not limited to this. Anything that can detect its own position can be applied as the position detection unit 29.
- GPS Global Positioning System
- the mobile terminal 40 is a device possessed by local staff deployed in various places within the management target area by the management system 90.
- the mobile terminal 40 includes a CPU 41, a memory 42 as a temporary storage area, a non-volatile storage unit 43, an input unit 44 such as a touch panel, a display unit 45 such as a liquid crystal display, and a wireless communication unit 48.
- the CPU 41, the memory 42, the storage unit 43, the input unit 44, the display unit 45, and the wireless communication unit 48 are connected to each other via the bus B4.
- the storage unit 43 is realized by an HDD, an SSD, a flash memory, or the like.
- the operator device 50 is a device operated by an operator who is a person who implements various services in the automatic driving support service.
- the operator device 50 includes a CPU 51, a memory 52 as a temporary storage area, a non-volatile storage unit 53, an input unit 54 such as a keyboard and a mouse, a display unit 55 such as a liquid crystal display, and a communication I / F unit 58.
- the CPU 51, the memory 52, the storage unit 53, the input unit 54, the display unit 55, and the communication I / F unit 58 are connected to each other via the bus B5.
- the storage unit 53 is realized by an HDD, an SSD, a flash memory, or the like.
- supporters Since the local staff and the operator both provide support for autonomous vehicles, these persons are collectively referred to as “supporters” below.
- the center-side device 10 includes a center-side receiving unit 11A, a management unit 11B, a center-side transmitting unit 11C, a center-side determining unit 11D, a requesting unit 11E, a communication unit 11F, and a setting unit. Includes 11G.
- the CPU 11 of the center side device 10 executes the center side communication program 13A, the communication status information transmission program 13B, and the center side communication interruption program 13C, the center side reception unit 11A, the management unit 11B, the center side transmission unit 11C, and the center side It functions as a determination unit 11D, a request unit 11E, a communication unit 11F, and a setting unit 11G.
- the vehicle-side device 20 includes a vehicle-side transmission unit 21A, a vehicle-side reception unit 21B, a vehicle-side determination unit 21C, and a stop unit 21D.
- the CPU 21 of the vehicle-side device 20 executes the vehicle-side communication program 23A, the communication status information reception program 23B, and the vehicle-side communication interruption program 23C, so that the vehicle-side transmission unit 21A, the vehicle-side reception unit 21B, the vehicle-side determination unit 21C, and the vehicle-side communication unit 21C are executed. It functions as a stop 21D.
- the vehicle side determination unit 21C automatically and the automatic driving support center at each position where the autonomous driving vehicle in the management target area by the management system 90 can travel. Based on the communication status information, which is information indicating the communication status with the driving vehicle, it is determined whether or not to continue the automatic driving.
- the center-side determination unit 11D contacts the supporter who provides support for the autonomous driving vehicle based on the communication status information when the communication with the autonomous driving vehicle is interrupted. To determine.
- communication between the center-side device 10 and the vehicle-side device 20 is always performed at predetermined period (for example, 0.5 seconds) intervals, and the predetermined period intervals are used.
- the state in which the communication in the above is interrupted continuously for a predetermined number of times (10 times as an example) or more is defined as the state in which the communication is interrupted.
- the time from transmission to reception is a predetermined period (for example, 3 seconds) or more.
- the state in which the delay occurs may be the state in which the communication is interrupted, and the state in which the received information is missing may be the state in which the communication is interrupted.
- the vehicle-side transmission unit 21A shows position information (in this embodiment, each information of latitude and longitude) indicating the traveling position of the self-driving vehicle provided by itself, and the time at that time.
- the probe information including the time information is transmitted to the center side device 10.
- the position information is acquired from the position detection unit 29.
- the time information is acquired from the clock unit built in the CPU 21.
- both the position information and the time information are included in the probe information, but the time information does not necessarily have to be included in the probe information.
- the center-side receiving unit 11A receives the probe information transmitted by the vehicle-side transmitting unit 21A, and the management unit 11B is included in the probe information received by the center-side receiving unit 11A.
- the location information is managed as communication record information in which communication is successful.
- the center-side transmission unit 11C transmits the communication record information managed by the management unit 11B to the vehicle-side device 20.
- the communication status information includes the communication record information. Therefore, the vehicle side determination unit 21C can determine whether or not to continue the automatic driving by using the communication record information, and whether the center side determination unit 11D also contacts the supporter by using the communication record information. You can decide whether or not.
- the communication status information indicates an area where the communication between the autonomous driving support center and the autonomous driving vehicle becomes unstable, which can be determined from the geographical information in the area managed by the management system 90. It is supposed to include unstable area information which is information. Therefore, the vehicle side determination unit 21C can determine whether or not to continue the automatic driving by using the unstable area information, and the center side determination unit 11D also contacts the supporter by using the unstable area information. You can decide whether or not to do it.
- the vehicle-side determination unit 21C determines the vehicle-side expected period, which is the period during which the interrupted communication is expected to be restored, based on the travel route and communication status information of the autonomous driving vehicle provided by the vehicle-side determination unit 21C. If the vehicle is out-licensed and the out-licensed vehicle-side expected period is within a predetermined period, it is determined that the automatic driving will be continued.
- a predetermined period a period derived from the past performance information is applied as a period in which no problem occurs even if the automatic driving is continued within the period. It is not limited to this.
- a form in which the operator or the like of the center side device 10 is made to set the above period in advance according to the cost that can be spent on the local staff in the automatic driving support service, the continuity required for the automatic driving support service, and the like. May be.
- the stop unit 21D is the case where the automatic traveling is continued in a state where the communication with the center side device 10 is interrupted, and even if the expected recovery point of the communication is reached. If communication is not restored, the automatic driving is stopped.
- the center-side determination unit 11D derives the center-side expected period, which is the period during which the interrupted communication is expected to be restored, based on the travel route and the communication status information of the autonomous driving vehicle in which the communication is interrupted. , If the derived center side expected period is within a predetermined period, it is decided not to contact the supporter. Further, the center-side determination unit 11D according to the present embodiment determines to contact the supporter when the communication with the autonomous driving vehicle is not restored even after the center-side expected period has elapsed.
- the communication unit 11F decides to contact the supporter after the center side determination unit 11D decides not to contact the supporter, the point where the supporter loses communication with the autonomous driving vehicle.
- the disruption-related information including both the routes on which the self-driving car is believed to have traveled during the disruption period.
- the interruption-related information for contacting the supporter includes both the point where the communication with the autonomous driving vehicle is interrupted and the route where the autonomous driving vehicle is considered to have traveled during the interruption period. Information is applied, but not limited to this.
- the interruption-related information to contact the supporter as a form of applying information including only one of the points where the communication with the autonomous vehicle is interrupted and the route where the autonomous vehicle is considered to have traveled during the interruption period. May be good.
- the requesting unit 11E when the communication with the autonomous driving vehicle whose communication is interrupted is restored, the requesting unit 11E according to the present embodiment provides the traveling state information indicating the traveling state of the autonomous driving vehicle during the period when the communication is interrupted. Request for the self-driving car. In response to this request, the autonomous driving vehicle transmits the traveling state information to the center side device 10.
- the setting unit 11G causes the supporter to confirm whether or not there is an abnormality in the traveling state indicated by the traveling state information obtained from the autonomous driving vehicle in response to the request by the requesting unit 11E, and the abnormality is found. If not, the information indicating the area where the communication between the autonomous driving support center and the autonomous driving vehicle becomes unstable in the communication interruption section, which is the section in which the autonomous driving vehicle traveled during the period when the communication was interrupted. Set to include in certain unstable area information.
- the mobile terminal 40 includes the processing unit 41A
- the operator device 50 includes the processing unit 51A.
- the CPU 41 of the mobile terminal 40 functions as the processing unit 41A by executing the program stored in the storage unit 43 in advance
- the CPU 51 of the operator device 50 executes the program stored in the storage unit 53 in advance to execute the processing unit 51A. Functions as.
- the communication status information database 13D is a communication indicating the communication status at the position indicated by the corresponding location information for each position information indicating each position in the management target area by the management system 90.
- Related information is stored.
- the management target area by the management system 90 is viewed in a plane, and the management target area in the plan view is divided into a plurality of division areas having a predetermined shape and size in a matrix.
- the communication-related information (in the present embodiment, the communication date and time) corresponding to the position information indicating the position of each division area (in the present embodiment, the center position in the plan view of the division area) Information and each information of geographical communication information) are associated and stored.
- a square is applied as the shape of the division region, and 20 m ⁇ 20 m is applied as the size, but it goes without saying that the shape and size are not limited to these.
- the probe can communicate well with the autonomous driving vehicle at the position indicated by the position information included in the probe information received from the autonomous driving vehicle by the center-side receiving unit 11A.
- the time information included in the information is stored as communication date and time information in association with the corresponding location information. If the probe information does not include the time information, the time information indicating the time at that time is input from the clock unit built in the CPU 11 of the center side device 10 at the timing when the probe information is received by the center side device 10. You can get it and apply it.
- the combination of the location information of the communication status information database 13D and the communication date / time information corresponds to the above-mentioned communication record information.
- communication between the center side device 10 and the vehicle side device 20 becomes geographically unstable.
- Information indicating that the communication is geographically unstable is stored in the communication status information database 13D as geographical communication information in association with the position information indicating the position.
- the communication between the center side device 10 and the vehicle side device 20 is geographically stable in association with the position information indicating the position where the communication is not geographically unstable.
- Information indicating that the information is being sent is stored in the communication status information database 13D as geographical communication information.
- the information "unstable” is applied as the information indicating that the communication is geographically unstable, and the communication is geographically unstable.
- the information "ordinary” is applied as the information indicating that the information does not become, but it goes without saying that the information is not limited to this information.
- the communication between the center side device 10 and the vehicle side device 20 in the state where the autonomous driving vehicle is running is geographically stable. It is possible to grasp whether or not it is.
- the combination of the location information and the geographical communication information of the communication status information database 13D corresponds to the unstable area information described above.
- communication status information the information registered in the communication status information database 13D is collectively referred to as "communication status information”.
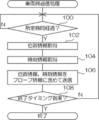
- the operation of the vehicle-side device 20 when executing the vehicle-side communication processing will be described as the operation of the vehicle-side device 20 according to the present embodiment.
- the CPU 21 of the vehicle-side device 20 mounted on any of the autonomous driving vehicles executes the vehicle-side communication program 23A
- the vehicle-side communication process shown in FIG. 6 is executed.
- the vehicle-side communication process shown in FIG. 6 is executed, for example, when automatic driving by an autonomous driving vehicle equipped with the vehicle-side device 20 is started.
- step 100 of FIG. 6 the vehicle-side transmission unit 21A waits until a predetermined time (0.5 seconds in the present embodiment) elapses, and in the next step 102, the vehicle-side transmission unit 21A of the own vehicle.
- the position information indicating the position is acquired from the position detection unit 29.
- the vehicle-side transmission unit 21A acquires time information indicating the time at that time
- the vehicle-side transmission unit 21A includes the acquired position information and time information in the probe information. Then, the information is transmitted to the center side device 10 via the wireless communication unit 28 and the network 80.
- the time information is acquired from the clock unit built in the CPU 21, but it goes without saying that the time information is not limited to this.
- the vehicle-side transmission unit 21A determines whether or not a predetermined end timing has arrived, and if a negative determination is made, the process returns to step 100.
- the vehicle side communication process is terminated.
- the timing at which the ignition off of the autonomous driving vehicle is detected is applied as the end timing, but the end timing is not limited to this.
- the end timing may be the timing at which the instruction information for instructing the end of the vehicle-side communication process is received from the center-side device 10 via the wireless communication unit 28.
- the operation of the center-side device 10 when executing the center-side communication processing will be described as the operation of the center-side device 10 according to the present embodiment.
- the center-side communication process shown in FIG. 7 is executed.
- the center-side communication process shown in FIG. 7 is executed when, for example, a predetermined time (for example, 4 o'clock) is set as the time when the service by the automatic driving support service is started.
- the center-side receiving unit 11A waits until probe information is received from any of the autonomous driving vehicles, and in the next step 502, the management unit 11B waits for a predetermined time (in this embodiment, the present embodiment). 2 seconds) Wait until it elapses.
- the management unit 11B stores the time information included in the received probe information in the corresponding storage area of the communication status information database 13D as the communication date and time information corresponding to the position information included in the probe information. (sign up. By registering probe information as communication status information at predetermined time intervals for each autonomous driving vehicle, the capacity of the communication status information database 13D can be reduced.
- the management unit 11B determines whether or not a predetermined end timing has arrived, and if a negative determination is made, the process returns to step 500, and when a positive determination is made, the center side. End the communication process.
- a predetermined time (1 o'clock as an example) is applied as the time when the service by the automatic driving support service is ended, but the end timing is limited to this. Absent.
- the end timing may be the timing at which the administrator of the center-side device 10 inputs the instruction information for instructing the end of the center-side communication process via the communication I / F unit 18.
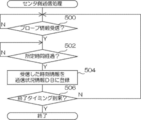
- the operation of the center-side device 10 when executing the communication status information transmission process will be described.
- the CPU 11 of the center-side device 10 executes the communication status information transmission program 13B
- the communication status information transmission process shown in FIG. 8 is executed.
- the communication status information transmission process shown in FIG. 8 is executed, for example, when a predetermined time (for example, 4 o'clock) is set as the time when the service by the automatic driving support service is started.
- step 600 of FIG. 8 the center-side transmission unit 11C waits until a predetermined timing for transmitting the communication status information to the autonomous driving vehicle arrives.
- a predetermined timing for transmitting the communication status information to the autonomous driving vehicle arrives.
- the timing of every predetermined time for example, 1 minute
- the timing is not limited to this.
- the center-side transmission unit 11C reads out all the communication status information from the communication status information database 13D.
- the center-side transmission unit 11C corresponds to the traveling position of the autonomous driving vehicle at the transmission destination from the read communication status information, and goes back from that time to a predetermined time (for example, 10 minutes) before.
- Information up to hereinafter referred to as "corresponding communication status information" is extracted.
- corresponding communication status information Information up to
- the center-side transmission unit 11C transmits the extracted corresponding communication status information to the autonomous driving vehicle via the communication I / F unit 18 and the network 80.
- the information corresponding to the traveling position of the destination autonomous vehicle the information about the inside of a predetermined range (for example, a radius of 1 km) around the traveling position of the corresponding autonomous vehicle is applied.
- a predetermined range for example, a radius of 1 km
- the corresponding communication status information all the communication status information registered in the communication status information database 13D may be applied, or the communication status information corresponding only to the traveling route of the destination autonomous vehicle may be applied. It may be a form or the like.
- the center-side transmission unit 11C determines whether or not a predetermined end timing has arrived, and if a negative determination is made, the process returns to step 600.
- the communication status information transmission process is terminated.
- the end timing a predetermined time (1 o'clock as an example) is applied as the time when the service by the automatic driving support service is ended, but the end timing is limited to this. Absent.
- the end timing may be the timing at which the administrator of the center-side device 10 inputs the instruction information for instructing the end of the communication status information transmission process via the communication I / F unit 18. ..
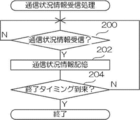
- the operation of the vehicle-side device 20 when executing the communication status information reception process will be described as the operation of the vehicle-side device 20 according to the present embodiment.
- the CPU 21 of the vehicle-side device 20 mounted on any of the autonomous driving vehicles executes the communication status information reception program 23B
- the communication status information reception process shown in FIG. 9 is executed.
- the communication status information reception process shown in FIG. 9 is executed, for example, when the automatic driving by the autonomous driving vehicle equipped with the vehicle-side device 20 is started.
- step 200 of FIG. 9 the vehicle-side receiving unit 21B waits until the corresponding communication status information (hereinafter, simply referred to as “communication status information”) is received from the center-side device 10, and in the next step 202, the vehicle The side receiving unit 21B stores the received communication status information in a predetermined area of the storage unit 23.
- communication status information hereinafter, simply referred to as “communication status information”.
- the vehicle-side receiving unit 21B determines whether or not a predetermined end timing has arrived, and if a negative determination is made, the process returns to step 200.
- the communication status information reception process is terminated.
- the timing at which the ignition off of the autonomous driving vehicle is detected is applied as the end timing, but the end timing is not limited to this.
- the end timing may be the timing at which the instruction information for instructing the end of the communication status information reception process is received from the center-side device 10 via the wireless communication unit 28.
- the operation of the vehicle-side device 20 when the vehicle-side communication interruption process is executed will be described.
- the CPU 21 of the vehicle-side device 20 mounted on any of the autonomous driving vehicles executes the vehicle-side communication blackout program 23C
- the vehicle-side communication blackout process shown in FIG. 10 is executed.
- the vehicle-side communication interruption process shown in FIG. 10 is executed, for example, when automatic driving by an autonomous driving vehicle equipped with the vehicle-side device 20 is started.
- step 300 of FIG. 10 the vehicle-side determination unit 21C determines whether or not the communication with the center-side device 10 is interrupted, and if a negative determination is made, the process proceeds to step 326 described later, while an affirmative determination is made. If it becomes, the process proceeds to step 302.
- step 302 the vehicle-side determination unit 21C reads out the communication status information stored by the above-mentioned communication status information reception process from the storage unit 23.
- step 304 the vehicle-side determination unit 21C uses the read communication status information to derive the expected communication restoration point, which is the position where the communication with the interrupted center-side device 10 is expected to be restored, as follows. ..
- the vehicle side determination unit 21C acquires the position information indicating the position at that time from the position detection unit 29, and the position indicated by the acquired position information is the position of the point where the communication with the center side device 10 is interrupted. (Hereinafter, it is referred to as "communication interruption start position").
- the vehicle-side determination unit 21C derives the position closer to the communication blackout start position among the positions satisfying each of the following conditions 1 and 2, as the expected communication recovery point.
- the method of deriving the expected communication recovery point is not limited to the above method.
- a position that meets any one of the above conditions 1 and 2 may be applied as a communication recovery expected point.
- the vehicle-side determination unit 21C uses the derived communication recovery prospective point to calculate the vehicle-side expected period Tc, which is the period during which communication with the center-side device 10 is expected to be restored, by the following equation (1). ) Is used for calculation.
- Ds in the formula (1) represents the mileage of the own vehicle from the communication interruption start position to the communication restoration expected point
- Sp represents the traveling speed of the own vehicle.
- the applied communication recovery expected point is obtained under the condition that meets the above condition 1, as shown in FIG. 11 as an example, the communication record information obtained by another autonomous vehicle or the like is used.
- the period during which the vehicle is expected to reach the obtained communication restoration expected point is calculated by the equation (1).
- the applied communication recovery expected point is obtained under the condition satisfying the above condition 2, as shown in FIG. 12 as an example, the communication such as a tunnel obtained by using the unstable area information can be obtained.
- the period during which the vehicle is expected to reach the expected communication restoration point is calculated by the equation (1).
- the vehicle-side determination unit 21C determines whether or not the calculated vehicle-side expected period Tc is equal to or less than a predetermined threshold value Th1, and if a negative determination is made, the process proceeds to step 324 described later. On the other hand, if a positive judgment is made, the process proceeds to step 310.
- step 310 the vehicle-side determination unit 21C sets the vehicle-side expected period Tc in a timer (in this embodiment, a timer built in the CPU 21) (not shown). According to the setting of the vehicle-side expected period Tc to this timer, the timer starts counting up to the vehicle-side estimated period Tc.
- a timer in this embodiment, a timer built in the CPU 21
- the vehicle side determination unit 21C starts storing (registering) the traveling state information indicating the traveling state of the own vehicle in the storage unit 23.
- the information indicating the traveling speed and the traveling position of the own vehicle is applied as the traveling state information, but the present invention is not limited to this, and the traveling state of the own vehicle such as the image of the in-vehicle camera and the sensing result is applied. Any information can be applied as long as it can be identified.
- step 314 the vehicle side determination unit 21C determines whether or not the communication with the center side device 10 has been restored, and if a positive determination is made, the process proceeds to step 316.
- step 316 when the vehicle-side transmitting unit 21A requests the traveling state information from the center-side device 10, the vehicle-side transmitting unit 21A reads the traveling state information stored up to this point from the storage unit 23, and reads the reading traveling state information from the center-side device. It is transmitted to 10 via the wireless communication unit 28 and the network 80.
- step 318 the vehicle side determination unit 21C stops the storage of the traveling state information started by the process of step 312, deletes the traveling state information from the storage unit 23, and then proceeds to step 326 described later.
- the traveling state information is transmitted from the autonomous driving vehicle to the center side device 10 in response to the request from the center side device 10, but the present invention is not limited to this.
- the traveling state information may be automatically transmitted to the center side device 10 when the interruption of communication with the center side device 10 is restored.
- step 314 the process proceeds to step 320, and the vehicle-side determination unit 21C acquires position information indicating the position at that time from the position detection unit 29. Then, the vehicle side determination unit 21C determines whether or not the position indicated by the acquired position information has reached the communication recovery expected point, and if a positive determination is made, the process proceeds to step 324 described later, while a negative determination is made. If it becomes, the process proceeds to step 322.
- step 322 the vehicle-side determination unit 21C determines whether or not the count-up of the timer has reached the set vehicle-side expected period Tc, and if a negative determination is made, the process returns to step 314, while making an affirmative determination. If it becomes, the process proceeds to step 324.
- step 324 the stop unit 21D controls the automatic traveling of the own vehicle to stop at the nearest road shoulder, and then proceeds to step 326.
- step 326 the vehicle side determination unit 21C determines whether or not the predetermined end timing has arrived, and if a negative determination is made, the process returns to step 300, while the vehicle side determines affirmatively. End the communication interruption process.
- the timing at which the ignition off of the autonomous driving vehicle is detected is applied as the end timing, but the end timing is not limited to this.
- the end timing may be the timing at which the instruction information for instructing the end of the vehicle-side communication interruption process is received from the center-side device 10 via the wireless communication unit 28.
- the center-side device 10 when the center-side communication interruption process is executed will be described.
- the CPU 11 of the center-side device 10 executes the center-side communication blackout program 13C
- the center-side communication blackout process shown in FIG. 13 is executed.
- the center-side communication interruption process shown in FIG. 13 is executed, for example, when a predetermined time (for example, 4 o'clock) is set as the time when the service by the automatic driving support service is started.
- step 700 of FIG. 13 the center-side determination unit 11D determines whether or not communication with any of the vehicle-side devices 20 is interrupted, and if a negative determination is made, the process proceeds to step 724, which will be described later. If the result is affirmative, the process proceeds to step 702. In the following, an autonomous vehicle whose communication has been interrupted will be referred to as a "processing target vehicle".
- step 702 the center-side determination unit 11D reads the communication status information from the communication status information database 13D.
- the center-side determination unit 11D uses the read communication status information to set the expected communication restoration point, which is the position where the communication with the vehicle-side device 20 of the vehicle to be processed is expected to be restored, as follows. Derived.
- the position indicated by the position information included in the probe information most recently received from the processing target vehicle by the above-mentioned center side communication processing is the position of the point where the communication with the processing target vehicle is interrupted. It is assumed that this is the communication interruption start position.
- the center-side determination unit 11D derives the position closer to the communication blackout start position among the positions satisfying each of the following conditions 3 and 4, as the expected communication recovery point.
- the method of deriving the expected communication recovery point is not limited to the above method.
- a position that meets any one of the above conditions 3 and 4 may be applied as a communication recovery expected point.
- the center-side determination unit 11D uses the derived communication restoration prospective point to calculate the center-side expected period Ts, which is the period during which communication with the vehicle to be processed is expected to be restored, by the following equation (2). Is calculated using.
- Ds in the formula (2) represents the mileage of the processing target vehicle from the communication interruption start position to the communication restoration expected point
- Sp represents the traveling speed of the processing target vehicle.
- the traveling speed Sp can be obtained from the amount of change in the traveling position per unit time indicated by the position information included in the probe information received by the center-side communication processing.
- the applied communication recovery expected point is obtained under the condition that meets the above condition 3, as shown in FIG. 11 as an example, the communication record information obtained by another autonomous vehicle or the like is used.
- the period during which the vehicle to be processed is expected to reach the obtained communication restoration expected point is calculated by the equation (2).
- the applied communication recovery expected point is obtained under the condition satisfying the above condition 4, as shown in FIG. 12 as an example, the communication such as a tunnel obtained by using the unstable area information can be obtained.
- the period during which the vehicle to be processed is expected to reach the communication restoration prospective point (the point marked with a star in FIG. 12 as an example), which is a position outside the unstable area, is calculated by the equation (2).
- the center-side determination unit 11D determines whether or not the calculated center-side expected period Ts is equal to or less than the predetermined threshold Th2, and if a negative determination is made, the process proceeds to step 722 described later. On the other hand, if a positive judgment is made, the process proceeds to step 710.
- the center-side determination unit 11D sets the center-side expected period Ts in a timer (in this embodiment, a timer built in the CPU 11) (not shown). According to the setting of the center-side expected period Ts to this timer, the timer starts counting up to the center-side expected period Ts.
- the center side determination unit 11D determines whether or not the communication with the vehicle to be processed has been restored, and if a positive determination is made, the process proceeds to step 714.
- the requesting unit 11E requests the processing target vehicle for the traveling state information indicating the traveling state of the processing target vehicle during the period when the communication is interrupted.
- the processing target vehicle transmits the traveling state information to the center side device 10 as described above.
- the setting unit 11G sets the running state information and the running state information so that the operator can confirm whether or not there is an abnormality in the running state indicated by the running state information received from the vehicle to be processed.
- the confirmation instruction information for instructing the confirmation is transmitted to the operator device 50 via the communication I / F unit 18 and the network 80.
- the processing unit 51A of the operator device 50 controls the display unit 55 so as to display the received running state information.
- the operator of the operator device 50 confirms whether or not there is a problem in the content of the traveling state information displayed on the display unit 55, and inputs the confirmation result information indicating the confirmation result via the input unit 54.
- the processing unit 51A transmits the input confirmation result information to the center side device 10 via the communication I / F unit 58 and the network 80.
- the setting unit 11G receives the confirmation result information from the operator device 50, and if the received confirmation result information is information indicating that there is no abnormality, the period during which the communication is interrupted.
- the section in which the vehicle to be processed travels in the unstable area information as an area where communication may become unstable, an update process that updates the communication status information database 13D is executed, and then an update process is executed, which will be described later. Step 724 is performed.
- step 712 determines whether or not the count-up of the timer has reached the set center-side expected period Ts, and makes a negative determination. If the result is, the process returns to step 712, while if the result is affirmative, the process proceeds to step 722.
- step 722 the communication unit 11F described above the information including each information of the point and time when the communication was interrupted, the route where the vehicle to be processed was considered to have traveled during the period when the communication was interrupted, and the expected communication recovery point. Derived as disruption-related information. Then, the communication unit 11F transmits the derived disruption-related information and the support instruction information for instructing the support of the processing target vehicle whose communication is interrupted to the mobile terminal 40 possessed by the local staff closest to the processing target vehicle. After transmitting via the F unit 18 and the network 80, the process proceeds to step 724.
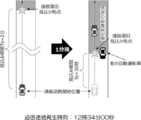
- the processing unit 41A of the mobile terminal 40 Upon receiving the interruption-related information and the support instruction information, the processing unit 41A of the mobile terminal 40 causes the display unit 45 to display the local staff presentation screen shown in FIG. 14 as an example.
- a point where communication is interrupted in FIG. 14, it is referred to as a “communication interruption point” and hereinafter referred to as a “communication interruption point”), and a communication recovery prospective point (“communication interruption point” in FIG. 14). It is described as “expected restoration point”, and hereafter, “expected restoration point”) is displayed.
- the vehicle to be processed traveled at the time when the communication was interrupted (indicated as "communication interruption occurrence time" in FIG. 14) and during the period when the communication was interrupted. The route is displayed.
- the local staff who referred to the local staff presentation screen shown in FIG. 14 searches the range from the communication interruption point to the expected restoration point, and the communication is not restored even after the expected period Ts on the center side elapses, that is, the vehicle to be processed, that is, the vehicle to be processed. It is possible to easily find the vehicle to be processed to be supported.
- the center-side determination unit 11D determines whether or not a predetermined end timing has arrived, and if a negative determination is made, the process returns to step 700, and when a positive determination is made, the center side determines. End the communication interruption process.
- the end timing a predetermined time (1 o'clock as an example) is applied as the time when the service by the automatic driving support service is ended, but the end timing is limited to this. Absent.
- the end timing may be the timing at which the administrator of the center-side device 10 inputs instruction information for instructing the end of the center-side communication interruption process via the communication I / F unit 18. ..
- the automatic driving vehicle within the management target area by the management system 90 is automatically driven at each position. Whether to continue automatic driving based on the communication status information, which is information indicating the communication status between the driving support center and the autonomous driving vehicle, and whether to contact the supporter who provides support for the autonomous driving vehicle I have decided whether or not. Therefore, it is possible to suppress a decrease in the continuity of the automatic driving support service and suppress an increase in the cost spent on the automatic driving support service.
- the vehicle side expected period is a period during which the interrupted communication is expected to be restored based on the travel route and communication status information of the autonomous driving vehicle provided by the vehicle side determination unit 21C.
- Tc is derived, and if the derived vehicle-side expected period Tc is within a predetermined period, it is determined that automatic driving will be continued. Therefore, by appropriately setting the predetermined period, it is possible to more appropriately suppress the decrease in the continuity of the automatic driving support service.
- the center-side expected period Ts which is the period during which the interrupted communication is expected to be restored based on the travel route and the communication status information of the autonomous driving vehicle in which the communication is interrupted by the center-side determination unit 11D. Is derived, and if the derived center-side expected period Ts is within a predetermined period, it is decided not to contact the supporter. Therefore, by appropriately setting the predetermined period, it is possible to more appropriately suppress an increase in the cost spent on the automatic driving support service.
- the center side determination unit 11D determines that if the communication with the autonomous driving vehicle is not restored even after the center side expected period Ts has elapsed, the supporter is contacted. Therefore, it is possible to suppress an increase in the cost spent on the automatic driving support service while maintaining the safety and security of the automatic driving support service.
- the vehicle-side determination unit 21C needs support on the way to the point where the interrupted communication is expected to be restored, based on the travel route and communication status information of the self-driving car provided by the vehicle side determination unit 21C. It is different from the first embodiment in that it is determined to continue the automatic driving when the degree of the driving is equal to or lower than a predetermined level.
- the above-mentioned route is a route without a pedestrian crossing, a route that is a pedestrian crossing road, and an autonomous vehicle gets on and off a bus, a taxi, or the like.
- the route does not have a passenger boarding / alighting point, and all the conditions are satisfied, it is determined that the degree of need for the above support is below the above level.
- the operation of the vehicle-side device 20 when the vehicle-side communication interruption process is executed as the operation of the vehicle-side device 20 according to the second embodiment will be described.
- the steps for executing the same process as the vehicle-side communication blackout process shown in FIG. 10 are given the same step numbers as those in FIG. 10, and the description thereof will be omitted.
- step 306 and step 308 are replaced with the processes of step 307 and step 309, respectively, and steps 310 and 322, respectively.
- the difference is that the process has been deleted.
- the vehicle-side determination unit 21C reads the route-related information from the storage unit 23, and uses the route-related information and the communication recovery prospective point derived by the process of step 304 to recover the communication.
- the automatic driving risk value R which indicates the degree to which support is required by the supporter on the way to the point, is calculated using the following equation (3).
- Cp in the formula (3) is substituted with "1" when there is a pedestrian crossing between the above-mentioned communication interruption start position and the communication recovery expected point (hereinafter, referred to as "risk target section"). Represents a variable to which "0" is assigned when there is no pedestrian crossing.
- Dp in the equation (3) represents a variable in which "1" is substituted when the risk target section is not a pedestrian-vehicle separated road, and "0" is substituted when the risk target section is a pedestrian-vehicle separated road.
- Ep in equation (3) when the autonomous vehicle is a vehicle that involves getting on and off a bus, taxi, etc., and there is a passenger boarding / alighting point in the risk target section, "1" is substituted and the boarding / alighting point is assigned. Represents a variable to which "0" is assigned when there is no. If the self-driving car is not a vehicle such as a bus or taxi that involves getting on and off, "0" is assigned to the variable Ep.
- the risk target section is a pedestrian-vehicle separation road
- the self-driving car is a vehicle that involves getting on and off a bus, taxi, or the like.
- "0" is calculated by the equation (3) as the automatic driving risk value R only when there is no boarding / alighting point for the passengers.
- the vehicle side determination unit 21C determines whether or not the calculated automatic driving risk value R is equal to or less than a predetermined threshold value Th3 (0 in this embodiment), and determines whether or not the calculated automatic driving risk value R is equal to or less than a predetermined threshold value Th3 (0 in this embodiment). If the result is, the process proceeds to step 324, while if the result is affirmative, the process proceeds to step 312.
- the vehicle side determination unit 21C reaches a point where the interrupted communication is expected to be restored based on the travel route and communication status information of the autonomous driving vehicle provided by the vehicle side determination unit 21C. If the degree to which support is required by the supporter (automatic driving risk value R) is less than or equal to a predetermined level (threshold value Th3), it is determined that automatic driving will be continued. Therefore, as compared with the case where the automatic driving risk value R is not used, it is possible to more appropriately suppress the decrease in the continuity of the automatic driving support service.
- a predetermined level Th3
- first condition a predetermined period
- second condition a predetermined level
- the center-side determination unit 11D according to the third embodiment is different from the first embodiment in that it mainly uses the latest communication status information to determine whether or not to contact the supporter.
- step 710 is deleted, the process of step 715 is added, and the process of step 720 is the process of step 719 and step.
- the difference is that it replaces the processing of 721.
- step 715 of FIG. 17 the setting unit 11G determines whether or not it is predicted that the traveling state indicated by the traveling state information received from the autonomous driving vehicle is abnormal, and if a positive determination is made, the step On the other hand, if a negative determination is made, the process proceeds to step 716 without executing the processes of steps 716 and 718.
- whether or not the running state is predicted to be abnormal is determined by whether or not the absolute value of the acceleration calculated from the received running state information is equal to or greater than a predetermined threshold value, and the running. This is done by determining whether or not the traveling position indicated by the state information is unstable, but it goes without saying that it is not limited to these.
- step 719 the center-side determination unit 11D adds the center-side estimated period Ts calculated by the process of step 706 to the time when the communication with the autonomous vehicle is interrupted (hereinafter referred to as "communication recovery estimated time"). It is determined whether or not is before the current time, and if the determination is affirmative, the process proceeds to step 722, and if the determination is negative, the process proceeds to step 721.
- step 721 the center-side determination unit 11D determines whether or not the communication status information has been updated with respect to the one read in step 702, and if a positive determination is made, the process returns to step 702, while a negative determination is made. If so, the process returns to step 712.
- step 719 is negatively determined until the current time reaches the estimated communication recovery time
- the process proceeds to step 721 without executing the process of contacting the local staff (process of step 722).
- the processes of steps 712, 719, and 721 are repeatedly executed until the communication status information is updated. If the communication status information is updated while this iterative process is being executed, the process of step 721 returns to the process of step 702, and the center-side expected period Ts is set using the updated communication status information. It will be calculated again.
- step 719 becomes an affirmative judgment, and the local staff is immediately contacted.
- the communication device is out of order.
- the center side determination unit 11D recalculates the center side estimated period Ts every time the communication status information is updated. Therefore, it is possible to contact the local staff more quickly.
- the setting unit 11G confirms with the supporter whether or not there is an abnormality in the running state indicated by the running state information only when it is predicted that the running state of the vehicle to be processed is abnormal. I'm letting you. Therefore, the cost spent on the supporter can be further suppressed.
- the management system 90 according to the fourth embodiment and the management system 90 according to the first embodiment differ only in that the vehicle-side device 20 is provided with the external sensor 60.
- the outside world sensor 60 is a LiDAR that measures the distance to an obstacle and a camera that shoots the front direction of the autonomous driving vehicle, and the CPU 21 can acquire image information and distance measurement data obtained by the shooting. it can.
- the management system 90 according to the fourth embodiment communication with the automatic driving support center is interrupted in the vehicle side device 20 with respect to the management system 90 according to the first embodiment.
- a speed control unit 21E is newly provided to control the running speed to be lower than that before the period when the automatic running is continued during the period.
- the management system 90 according to the fourth embodiment is a transmission destination of the communication record information when the center side transmission unit 11C transmits the communication record information to the management system 90 according to the first embodiment.
- communicateable predicted point Based on the driving position and driving route of the autonomous driving vehicle, only the latest point information (hereinafter referred to as "communicable predicted point") that is predicted to be able to communicate at the point of the driving route is transmitted. It's different.
- the vehicle side determination unit 21C has a vehicle side expected period Tc within a predetermined period with respect to the management system 90 according to the first embodiment. The difference is that if it is determined that the vehicle can be safely driven according to the result of sensing by a predetermined sensor (in the present embodiment, the camera and LiDAR constituting the external sensor 60), it is determined to continue the automatic driving. ..
- the operation of the center-side device 10 when executing the communication status information transmission process will be described as the operation of the center-side device 10 according to the fourth embodiment.
- the steps for executing the same process as the communication status information transmission process shown in FIG. 8 are assigned the same step numbers as those in FIG. 8 and the description thereof will be omitted.
- the communication status information transmission process shown in FIG. 21 and the communication status information transmission process shown in FIG. 8 are different in that the processes of step 603 and step 605 are applied instead of the process of step 604.
- the center-side transmission unit 11C uses the communication status information read by the process of step 602 to derive the communication recovery prospect in the process of step 704 of the center-side communication interruption process shown in FIG. A communicable predicted point is derived by the same method as the point.
- the center-side transmission unit 11C transmits the derived information indicating the communicable predictive point to the destination autonomous vehicle via the communication I / F unit 18 and the network 80.
- the operation of the vehicle-side device 20 when executing the communication status information reception process will be described as the operation of the vehicle-side device 20 according to the fourth embodiment.
- the steps for executing the same process as the communication status information reception process shown in FIG. 9 are given the same step numbers as those in FIG. 9, and the description thereof will be omitted.
- the communication status information reception process shown in FIG. 22 and the communication status information reception process shown in FIG. 9 differ in that the processes of step 201 and step 203 are applied instead of the processes of step 200 and step 202, respectively. There is.
- the vehicle-side receiving unit 21B waits until the information indicating the communicable prediction point is received from the center-side device 10, and in the next step 203, the vehicle-side receiving unit 21B receives.
- the information indicating the communicable prediction point is stored in the predetermined area of the storage unit 23.
- the operation of the vehicle-side device 20 when executing the vehicle-side communication interruption process will be described.
- the same step number as that of FIG. 10 is assigned to the step of executing the same process as the vehicle-side communication blackout process shown in FIG. 10, and the description thereof will be omitted.
- step 303, step 305, and step 307 are applied instead of the processes of step 302, step 304, and step 306, respectively.
- step 304, and step 306 respectively.
- the point is different.
- the vehicle-side communication blackout process shown in FIG. 23 and the vehicle-side communication blackout process shown in FIG. 10 are different in that the processes of step 309 and step 315 are newly included.
- the vehicle side determination unit 21C reads out the information indicating the communicable predictive point stored by the communication status information reception process described above from the storage unit 23.
- the speed control unit 21E controls the traveling speed of the own vehicle so as to be lowered by a predetermined speed (for example, 10 km / h).
- the vehicle-side determination unit 21C sets the communicable predictive point indicated by the read information as the above-mentioned communication recovery expected point, and sets the traveling speed after being reduced by the process of step 305 as the traveling speed Sp.
- the vehicle-side expected period Tc is calculated using the equation (1).
- the center-side device 10 also calculates the center-side expected period Ts, assuming that the traveling speed of the vehicle to be processed is lower than that before the communication blackout.
- the vehicle side determination unit 21C determines whether or not there is an obstacle or the like that hinders the traveling of the own vehicle in front of the own vehicle based on the sensing result by the outside world sensor 60, thereby determining the outside world. It is determined whether or not there is a problem with the sensing result by the sensor 60, that is, whether or not the route to the expected communication recovery point can be safely passed by automatic driving, and if a positive determination is made, the process proceeds to step 310, while the process proceeds to step 310. If a negative determination is made, the process proceeds to step 324.
- step 315 the speed control unit 21E controls to return the traveling speed of the own vehicle, which has been reduced by the process of step 305, to the original speed.
- the center-side transmission unit 11C transmits the communication record information, it is based on the travel position and the travel route of the autonomous driving vehicle to which the communication record information is transmitted. , Only the latest point information that is predicted to be able to communicate at the point of the driving route is transmitted. Therefore, the information related to the communication record can be transmitted more efficiently than the case where the communication record information itself is transmitted.
- the vehicle-side determination unit 21C enables the vehicle-side expected period Tc to be within a predetermined period and to be able to drive safely according to the result of sensing by the predetermined sensor. If it is judged, it is decided to continue automatic driving. Therefore, it is possible to continue automatic driving more appropriately.
- the traveling speed is increased as compared with that before the period. It is controlled to decrease. Therefore, the safety of automatic driving can be improved.
- the management unit 11B, the center side determination unit 11D, the request unit 11E, the communication unit 11F, and the setting unit 11G are provided in the center side device 10, and the vehicle side determination unit 21C, the stop unit 21D, and the speed control unit are provided.
- the 21E is provided in the vehicle side device 20 has been described, but the present invention is not limited to this.
- each of these parts may be provided in either the center-side device 10 or the vehicle-side device 20 within a range in which the corresponding function can be executed.
- the communication interruption section set as unstable area information by the setting unit 11G by the process of step 718 of the center side communication interruption processing is set by the setting unit.
- the communication interruption section When communication with another autonomous vehicle traveling in the communication interruption section is not interrupted by 11G, it may be set to be excluded from the unstable area information. Thereby, the occurrence of unnecessary determination can be reduced.
- each of the mathematical formulas (1) to (3) according to each of the above embodiments is an example, and various modifications can be added to each mathematical formula.
- equation (3) the values of the variables Cp, Dp, and Ep are added, but by multiplying the values of these variables, the automatic driving risk value R can be obtained. It can also be in the form of calculation.
- the configuration of each device according to each of the above embodiments is an example, and the configuration of each device can be changed within a range that does not deviate from the gist of the present disclosure.
- the center-side device 10 and the vehicle-side device 20 have an input unit and a display unit, but each device may not have these parts.
- the center side receiving unit 11A, the management unit 11B, the center side transmitting unit 11C, the center side determining unit 11D, the requesting unit 11E, the contact unit 11F, the setting unit 11G, and the vehicle side transmitting unit 21A includes various processors shown below. Can be used. As described above, the various processors include a CPU, which is a general-purpose processor that executes software (program) and functions as a processing unit, and a circuit configuration after manufacturing an FPGA (Field-Programmable Gate Array) or the like.
- a CPU which is a general-purpose processor that executes software (program) and functions as a processing unit
- FPGA Field-Programmable Gate Array
- a dedicated electric circuit that is a processor having a circuit configuration specially designed to execute a specific process such as a programmable logic device (PLD), an ASIC (Application Specific Integrated Circuit), which is a processor that can change the CPU. Etc. are included.
- PLD programmable logic device
- ASIC Application Specific Integrated Circuit
- the processing unit may be composed of one of these various processors, or a combination of two or more processors of the same type or different types (for example, a combination of a plurality of FPGAs or a combination of a CPU and an FPGA). It may be composed of. Further, the processing unit may be configured by one processor.
- one processor is configured by a combination of one or more CPUs and software, and this processor There is a form that functions as a processing unit.
- SoC System On Chip
- a processor that realizes the functions of the entire system including the processing unit with one IC (Integrated Circuit) chip is used.
- the processing unit is configured by using one or more of the above-mentioned various processors as a hardware structure.
- an electric circuit in which circuit elements such as semiconductor elements are combined can be used.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Signal Processing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Human Computer Interaction (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Atmospheric Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Aviation & Aerospace Engineering (AREA)
- Traffic Control Systems (AREA)
- Mobile Radio Communication Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202080070772.6A CN114556456B (zh) | 2019-10-29 | 2020-10-12 | 管理系统、管理方法、以及管理程序 |
| US17/660,924 US12197237B2 (en) | 2019-10-29 | 2022-04-27 | Management system, management method, and storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019-196062 | 2019-10-29 | ||
| JP2019196062A JP7172946B2 (ja) | 2019-10-29 | 2019-10-29 | 管理システム、管理方法、及び管理プログラム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/660,924 Continuation US12197237B2 (en) | 2019-10-29 | 2022-04-27 | Management system, management method, and storage medium |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021085101A1 true WO2021085101A1 (ja) | 2021-05-06 |
Family
ID=75713135
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/038492 Ceased WO2021085101A1 (ja) | 2019-10-29 | 2020-10-12 | 管理システム、管理方法、及び管理プログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US12197237B2 (enExample) |
| JP (1) | JP7172946B2 (enExample) |
| CN (1) | CN114556456B (enExample) |
| WO (1) | WO2021085101A1 (enExample) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023176903A1 (ja) | 2022-03-18 | 2023-09-21 | パナソニックIpマネジメント株式会社 | 情報出力方法、プログラム、及び情報出力システム |
| WO2023223918A1 (ja) | 2022-05-18 | 2023-11-23 | パナソニックIpマネジメント株式会社 | 情報処理方法、プログラム、及び情報処理システム |
| WO2025203317A1 (ja) * | 2024-03-27 | 2025-10-02 | 日本電気株式会社 | 自動運転システム、自動運転方法及び運転制御装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7625989B2 (ja) * | 2021-06-25 | 2025-02-04 | 株式会社デンソー | 乗客見守り装置、運行管理システム |
| JP7229314B1 (ja) * | 2021-10-04 | 2023-02-27 | 三菱電機株式会社 | 運転支援装置、運転支援システム、運転支援プログラム、および、運転支援方法 |
| US12382385B2 (en) * | 2022-02-16 | 2025-08-05 | Rakuten Mobile, Inc. | Network controller for coordinating base station operation with routing |
| US20240124020A1 (en) * | 2022-10-13 | 2024-04-18 | Zoox, Inc. | Stopping action of an autonomous vehicle |
| JPWO2024154243A1 (enExample) * | 2023-01-18 | 2024-07-25 | ||
| WO2024166194A1 (ja) * | 2023-02-07 | 2024-08-15 | 日本電信電話株式会社 | センサデータ収集方法およびセンサデバイス |
| JP7592903B1 (ja) | 2024-01-05 | 2024-12-02 | Kddi株式会社 | 遠隔制御システム、制御方法及び制御装置 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016071585A (ja) * | 2014-09-30 | 2016-05-09 | パナソニックIpマネジメント株式会社 | 運転制御システム、運転制御装置、および、遠隔操作装置 |
| JP2017021755A (ja) * | 2015-07-15 | 2017-01-26 | 三菱自動車工業株式会社 | 車両の運転支援装置 |
| JP2018538647A (ja) * | 2015-11-04 | 2018-12-27 | ズークス インコーポレイテッド | 自律車両の軌道修正のための遠隔操作システムおよび方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69101411T2 (de) * | 1990-07-19 | 1994-10-13 | Matsushita Electric Ind Co Ltd | Geschwindigkeitsregelvorrichtung für Kraftfahrzeuge. |
| JP4192714B2 (ja) * | 2003-07-28 | 2008-12-10 | 株式会社デンソー | 車載無線通信端末 |
| KR101499520B1 (ko) * | 2013-05-02 | 2015-03-18 | 현대오트론 주식회사 | 사용자 경험 데이터의 학습을 통한 신호등의 신호 변경 예측 시스템 및 방법 |
| DE102013013867A1 (de) * | 2013-08-20 | 2015-03-12 | Audi Ag | Kraftfahrzeug und Verfahren zur Steuerung eines Kraftfahrzeugs |
| JP6369028B2 (ja) * | 2014-01-27 | 2018-08-08 | アイシン・エィ・ダブリュ株式会社 | 経路探索システム、経路探索方法及びコンピュータプログラム |
| EP2921363A1 (en) * | 2014-03-18 | 2015-09-23 | Volvo Car Corporation | Vehicle, vehicle system and method for increasing safety and/or comfort during autonomous driving |
| JP6294247B2 (ja) * | 2015-01-26 | 2018-03-14 | 株式会社日立製作所 | 車両走行制御装置 |
| US9507346B1 (en) * | 2015-11-04 | 2016-11-29 | Zoox, Inc. | Teleoperation system and method for trajectory modification of autonomous vehicles |
| JP6462146B2 (ja) * | 2015-11-05 | 2019-01-30 | 株式会社日立製作所 | 移動体移動システム及び移動経路選択方法 |
| JPWO2017111126A1 (ja) * | 2015-12-23 | 2018-10-18 | 京セラ株式会社 | サーバ装置、車両制御装置、および通信装置 |
| JP6614178B2 (ja) * | 2017-02-16 | 2019-12-04 | トヨタ自動車株式会社 | 車両通信システム及び車両制御装置 |
| WO2018225365A1 (ja) | 2017-06-07 | 2018-12-13 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| JP6721014B2 (ja) * | 2017-09-28 | 2020-07-08 | 株式会社デンソー | 車両用通信システム、車両用通信装置および管理装置 |
| JP6958252B2 (ja) * | 2017-11-07 | 2021-11-02 | トヨタ自動車株式会社 | 遠隔監視システム及び自律走行車両並びに遠隔監視方法 |
| CN109861884A (zh) * | 2019-01-31 | 2019-06-07 | 深兰科技(上海)有限公司 | 自动驾驶系统的通信性能测试方法、装置和系统 |
| JP7276072B2 (ja) * | 2019-10-22 | 2023-05-18 | 株式会社デンソー | 遠隔支援システム、車載装置、遠隔支援方法、及び遠隔支援プログラム |
-
2019
- 2019-10-29 JP JP2019196062A patent/JP7172946B2/ja active Active
-
2020
- 2020-10-12 CN CN202080070772.6A patent/CN114556456B/zh active Active
- 2020-10-12 WO PCT/JP2020/038492 patent/WO2021085101A1/ja not_active Ceased
-
2022
- 2022-04-27 US US17/660,924 patent/US12197237B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016071585A (ja) * | 2014-09-30 | 2016-05-09 | パナソニックIpマネジメント株式会社 | 運転制御システム、運転制御装置、および、遠隔操作装置 |
| JP2017021755A (ja) * | 2015-07-15 | 2017-01-26 | 三菱自動車工業株式会社 | 車両の運転支援装置 |
| JP2018538647A (ja) * | 2015-11-04 | 2018-12-27 | ズークス インコーポレイテッド | 自律車両の軌道修正のための遠隔操作システムおよび方法 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023176903A1 (ja) | 2022-03-18 | 2023-09-21 | パナソニックIpマネジメント株式会社 | 情報出力方法、プログラム、及び情報出力システム |
| WO2023223918A1 (ja) | 2022-05-18 | 2023-11-23 | パナソニックIpマネジメント株式会社 | 情報処理方法、プログラム、及び情報処理システム |
| WO2025203317A1 (ja) * | 2024-03-27 | 2025-10-02 | 日本電気株式会社 | 自動運転システム、自動運転方法及び運転制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20220250651A1 (en) | 2022-08-11 |
| JP7172946B2 (ja) | 2022-11-16 |
| CN114556456A (zh) | 2022-05-27 |
| CN114556456B (zh) | 2024-05-31 |
| US12197237B2 (en) | 2025-01-14 |
| JP2021071753A (ja) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021085101A1 (ja) | 管理システム、管理方法、及び管理プログラム | |
| JP7141370B2 (ja) | 標準的なナビゲーション地図と車両の過去の軌跡に基づいて決定された車線構成を利用した自動運転 | |
| JP6606532B2 (ja) | 自律走行車のために車両群を管理する方法及びシステム | |
| JP6742224B2 (ja) | 自律走行車間に車両間通信を提供するためのシステム、および方法 | |
| CN109287122B (zh) | 基于自动驾驶车辆的控制反馈更新地图的方法和系统 | |
| CN114599566A (zh) | 远程辅助系统、车载装置、远程辅助方法以及远程辅助程序 | |
| JP2020060552A (ja) | 自動運転車両のための以前の運転軌跡に基づくリアルタイムマップ生成方法 | |
| AU2018306521B2 (en) | Detecting service provider state based on received and historic telematics data and service provider characteristics | |
| JP2019145077A (ja) | 自律走行車(adv)に対して車両とクラウド間のリアルタイム交通地図を構築するためのシステム | |
| JP2020523552A (ja) | 自動運転車両の経路計画のための運転シナリオに基づく車線ガイドライン | |
| CN111857119A (zh) | 用于停放自动驾驶车辆的停车管理架构 | |
| EP3570180B1 (en) | Information communication system, information communication method, and server | |
| US20220307851A1 (en) | Autonomous vehicle augmented reality display for displaying contextual information | |
| US9865163B2 (en) | Management of mobile objects | |
| US9454903B2 (en) | Road information sharing method, road information sharing system, road information sharing device, and road information sharing program | |
| CN112179364A (zh) | 信息处理装置及信息处理方法 | |
| JP2020524931A (ja) | モバイル・オブジェクトの管理方法、システム、コンピュータ・プログラム | |
| KR20190100855A (ko) | 자율 주행 차량을 위한 자기 위치 측정 방법, 시스템 및 기계 판독 가능한 매체 | |
| US20210035438A1 (en) | Pedestrian management systems and methods | |
| US20190193729A1 (en) | Detecting anomalous vehicle behavior through automatic voting | |
| WO2019117047A1 (ja) | 車載装置、情報提示方法 | |
| JP6729701B2 (ja) | 特定プログラム、特定方法および特定装置 | |
| JP7307824B1 (ja) | 情報処理装置、移動体、システム、情報処理方法、及びプログラム | |
| CN110113716B (zh) | 一种路径状态信息获取方法、装置及存储介质 | |
| JP2021026522A (ja) | 走行履歴出力システム、走行履歴出力プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20881702 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20881702 Country of ref document: EP Kind code of ref document: A1 |