WO2020208808A1 - 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 - Google Patents
加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 Download PDFInfo
- Publication number
- WO2020208808A1 WO2020208808A1 PCT/JP2019/015966 JP2019015966W WO2020208808A1 WO 2020208808 A1 WO2020208808 A1 WO 2020208808A1 JP 2019015966 W JP2019015966 W JP 2019015966W WO 2020208808 A1 WO2020208808 A1 WO 2020208808A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- movable member
- processing
- irradiation device
- processing system
- light
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images






























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted for a procedure covered by only one of the other main groups of this subclass
- B23K37/02—Carriages for supporting the welding or cutting element
- B23K37/0247—Driving means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1641—Program controls characterised by the control loop compensation for backlash, friction, compliance, elasticity in the joints
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/02—Positioning or observing the workpiece, e.g. with respect to the point of impact; Aligning, aiming or focusing the laser beam
- B23K26/06—Shaping the laser beam, e.g. by masks or multi-focusing
- B23K26/062—Shaping the laser beam, e.g. by masks or multi-focusing by direct control of the laser beam
- B23K26/0622—Shaping the laser beam, e.g. by masks or multi-focusing by direct control of the laser beam by shaping pulses
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/082—Scanning systems, i.e. devices involving movement of the laser beam relative to the laser head
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/08—Devices involving relative movement between laser beam and workpiece
- B23K26/0869—Devices involving movement of the laser head in at least one axial direction
- B23K26/0876—Devices involving movement of the laser head in at least one axial direction in at least two axial directions
- B23K26/0884—Devices involving movement of the laser head in at least one axial direction in at least two axial directions in at least three axial directions, e.g. manipulators, robots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/12—Working by laser beam, e.g. welding, cutting or boring in a special environment or atmosphere, e.g. in an enclosure
- B23K26/127—Working by laser beam, e.g. welding, cutting or boring in a special environment or atmosphere, e.g. in an enclosure in an enclosure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/36—Removing material
- B23K26/362—Laser etching
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K26/00—Working by laser beam, e.g. welding, cutting or boring
- B23K26/36—Removing material
- B23K26/40—Removing material taking account of the properties of the material involved
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K37/00—Auxiliary devices or processes, not specially adapted for a procedure covered by only one of the other main groups of this subclass
- B23K37/02—Carriages for supporting the welding or cutting element
- B23K37/0205—Carriages for supporting the welding or cutting element guided by hand
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0075—Manipulators for painting or coating
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1656—Program controls characterised by programming, planning systems for manipulators
- B25J9/1664—Program controls characterised by programming, planning systems for manipulators characterised by motion, path, trajectory planning
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2101/00—Articles made by soldering, welding or cutting
- B23K2101/006—Vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2101/00—Articles made by soldering, welding or cutting
- B23K2101/18—Sheet panels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2101/00—Articles made by soldering, welding or cutting
- B23K2101/34—Coated articles ; Surface treated articles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B23—MACHINE TOOLS; METAL-WORKING NOT OTHERWISE PROVIDED FOR
- B23K—SOLDERING OR UNSOLDERING; WELDING; CLADDING OR PLATING BY SOLDERING OR WELDING; CUTTING BY APPLYING HEAT LOCALLY, e.g. FLAME CUTTING; WORKING BY LASER BEAM
- B23K2103/00—Materials to be soldered, welded or cut
- B23K2103/30—Organic materials
- B23K2103/42—Plastics other than composite materials
Definitions
- the present invention relates to a processing system capable of processing an object with processing light, a technical field of processing method, a robot system, an end effector device, and a connection device for connecting a robot and an end effector.
- Patent Document 1 describes a processing system that irradiates the surface of an object with processing light to form a structure. In this type of processing system, it is required that the relative positional relationship between the irradiation device that irradiates the object with the processing light and the object is appropriate.
- a movable member whose relative positional relationship with a part of the object can be changed and the processing light are irradiated toward the object.
- the irradiating device is provided with a connecting device for connecting the movable member and the irradiating device so that the relative positional relationship between the movable member and the irradiating device can be changed, and the connecting device is movable.
- a processing system including a driving member for moving at least one of a member and the irradiation device, and an elastic member for connecting the movable member and the irradiation device.
- a movable member in a processing system for processing an object with processing light, a movable member whose relative positional relationship with a part of the object can be changed and the processing light are irradiated toward the object.
- a connecting device connecting the movable member and the irradiation device, and the movable member toward the irradiation device so that the relative positional relationship between the irradiation device and the movable member and the irradiation device can be changed.
- a processing system including a vibration reducing device for reducing vibration is provided.
- a movable member in a processing system for processing an object with processing light, a movable member whose relative positional relationship with a part of the object can be changed and the processing light are irradiated toward the object.
- a connecting device connecting the movable member and the irradiation device and the irradiation device with respect to the object or a reference position so that the relative positional relationship between the irradiation device and the movable member and the irradiation device can be changed.
- the connection device is provided by a processing system including a position changing member for changing the position of the irradiation device with respect to the movable member based on the position measurement result by the position measuring device. Will be done.
- the positional relationship between the position of the movable member and the position of a part of the object is changed, and the object is directed to the object by using an irradiation device.
- To irradiate the processing light to change the relative positional relationship between the movable member and the irradiation device, to move at least one of the movable member and the irradiation device, and the movable member.
- a processing method including connecting the movable member and the irradiation device by a connecting portion including an elastic member for connecting the member and the irradiation device is provided.
- the positional relationship between the position of the movable member and the position of a part of the object is changed, and the object is directed to the object by using an irradiation device.
- a processing method including irradiating the processing light, changing the relative positional relationship between the movable member and the irradiation device, and reducing vibration from the movable member to the irradiation device.
- the positional relationship between the position of the movable member and the position of a part of the object is changed, and the object is aimed at the object by using an irradiation device.
- the movable member and the irradiation device are relative to each other based on the irradiation of the processing light, the measurement of the position of the irradiation device with respect to the object or the reference position, and the measured position of the irradiation device.
- a processing method including changing the positional relationship is provided.
- a connecting device for connecting the movable member and the end effector is provided so that the relationship can be changed, and the connecting device includes a driving member for moving at least one of the movable member and the end effector, and said.
- a robot system including an elastic member that connects a movable member and the end effector.
- a robot system including a connecting device for connecting the movable member and the end effector and a vibration reducing device for reducing vibration from the movable member toward the end effector is provided so that the relationship can be changed.
- an end effector acting on an object a movable member whose relative relationship with a part of the object can be changed, and a relative position between the movable member and the end effector.
- the connecting device includes a connecting device for connecting the movable member and the end effector and a position measuring device for measuring the position of the end effector with respect to the object or the reference position so that the relationship can be changed.
- a robot system including a position changing member for changing the position of the end effector with respect to the movable member based on the position measurement result by the position measuring device is provided.
- a connecting device for connecting an end effector acting on an object and a movable member whose relative relationship with a part of the object can be changed, the movable member and the said movable member.
- a driving member for moving at least one of the end effectors and an elastic member for connecting the movable member and the end effector are provided so that the relative positional relationship between the movable member and the end effector can be changed.
- a connecting device for connecting an end effector acting on an object and a movable member whose relative relationship with a part of the object can be changed, from the movable member to the movable member.
- a connecting device provided with a vibration reducing device for reducing vibration toward an end effector, and connecting the movable member and the end effector so that the relative positional relationship between the movable member and the end effector can be changed. Will be done.
- a connecting device for connecting an end effector acting on an object and a movable member whose relative relationship with a part of the object can be changed, the object or a reference position.
- a connecting device including a position changing member for changing the position of the end effector with respect to the movable member is provided based on a position measurement result by the connecting device and / or a position measuring device for measuring the position of the end effector.
- the relative positional relationship between the end effector acting on the object and the movable member whose relative relationship with a part of the object can be changed and the end effector can be changed.
- a connecting device for connecting the movable member and the end effector is provided, and the connecting device includes a driving member for moving at least one of the movable member and the end effector, and the movable member and the end.
- An end effector device including an elastic member that couples with an effector is provided.
- the relative positional relationship between the end effector acting on the object and the movable member whose relative relationship with a part of the object can be changed and the end effector can be changed.
- an end effector device including a connecting device for connecting the movable member and the end effector and a vibration reducing device for reducing vibration from the movable member toward the end effector is provided.
- a connecting device for connecting the movable member and the end effector, and a position measuring device for measuring the position of the end effector with respect to the object or a reference position are provided, and the connecting device is based on the position measuring device.
- An end effector device including a position changing member that changes the position of the end effector with respect to the movable member based on the position measurement result is provided.
- FIG. 1 is a cross-sectional view schematically showing the overall structure of the processing system of the first embodiment.
- FIG. 2A and FIG. 2B is a cross-sectional view schematically showing a state of processing of a coating film formed on the surface of an object to be processed.
- FIG. 3A is a cross-sectional view schematically showing a light irradiation device included in the processing system of the first embodiment, and each of FIGS. 3B and 3C is a light source included in the light irradiation device. It is sectional drawing which shows the structure of a system.
- FIG. 4 is a cross-sectional view schematically showing the composition of a light irradiation device not provided with a light source system.
- FIG. 4 is a cross-sectional view schematically showing the composition of a light irradiation device not provided with a light source system.
- FIG. 5 is a cross-sectional view showing the structure of the first drive system.
- FIG. 6 is a cross-sectional view showing the structure of the second drive system.
- FIG. 7A is a cross-sectional view showing a cross section of the riblet structure formed by the processing apparatus of the first embodiment
- FIG. 7B is a perspective view showing the riblet structure formed by the processing apparatus of the first embodiment.
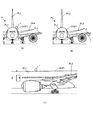
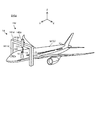
- 8 (a) and 8 (b) are front views showing an aircraft which is an example of a processing object on which a riblet structure is formed
- FIG. 8 (c) is a processing in which a riblet structure is formed. It is a side view which shows the aircraft which is an example of an object.
- FIG. 8 (a) and 8 (b) are front views showing an aircraft which is an example of a processing object on which a riblet structure is formed
- FIG. 8 (c) is a processing in which a riblet structure is formed.
- It is a side view which shows the aircraft which
- FIG. 9 is a plan view showing a plurality of processed shot regions set on the surface of the coating film.
- FIG. 10 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 11 (a) is a cross-sectional view showing a processing apparatus that performs one step of the processing operation for forming the riblet structure, and
- FIG. 11 (b) shows one step of the processing operation shown in FIG. 11 (a). It is a top view which shows the surface of the coating film performed.
- FIG. 12 is a plan view showing the scanning locus of the processing light (that is, the moving locus of the target irradiation region) during the period in which the scanning operation and the step operation are repeated.
- FIG. 10 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 11 (a) is a cross-sectional view showing a processing apparatus
- FIG. 13 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 14 (a) is a cross-sectional view showing a processing apparatus that performs one step of the processing operation for forming the riblet structure, and
- FIG. 14 (b) shows one step of the processing operation shown in FIG. 14 (a). It is a top view which shows the surface of the coating film performed.
- FIG. 15 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 16 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 17 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 18 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 19 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 20 is a cross-sectional view showing a processing apparatus that performs one step of a processing operation for forming a riblet structure.
- FIG. 21 is a cross-sectional view schematically showing the overall structure of the processing system of the second embodiment.
- FIG. 22 is a cross-sectional view schematically showing the overall structure of the processing system of the third embodiment.
- FIGS. 23 (a) and 23 (b) is a plan view showing a test structure formed when the drive system is controlled based on the measurement result of the position measuring device.
- FIGS. 24 (a) and 24 (b) is a sensitive member when the processing light is irradiated while controlling the drive system as in the case of forming the test structure based on the measurement result of the position measuring device. It is a top view which shows the characteristic change pattern formed in.
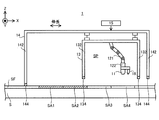
- FIG. 25 is a cross-sectional view schematically showing the structure of the processing system of the fourth embodiment.
- FIG. 26 is a perspective view schematically showing the structure of the processing system of the fifth embodiment.
- FIG. 27 is a front view schematically showing the structure of the processing system of the fifth embodiment.
- FIG. 28 is a side view schematically showing the structure of the processing system of the fifth embodiment.
- FIG. 29 is an enlarged front view showing a part of the structure of the processing system of the fifth embodiment.
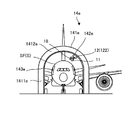
- FIG. 30 is a cross-sectional view showing the structure of the drive system of the sixth embodiment.
- FIG. 31 is a cross-sectional view showing the structure of the drive system according to the sixth embodiment.
- FIG. 32 is a front view showing a light irradiating device whose posture has changed so as to irradiate processing light from diagonally downward to diagonally upward of the aircraft, which is the object to be processed.
- FIG. 32 is a front view showing a light irradiating device whose posture has changed so as to irradiate processing light from diagonally downward to diagonally upward of the aircraft, which is the object to be processed.
- FIG. 33 is a cross-sectional view showing a plurality of second drive systems connecting the light irradiation device shown in FIG. 32 and the first drive system.
- FIG. 34 is a cross-sectional view schematically showing the structure of the processing system of the seventh embodiment.
- FIG. 35 shows an example of an end effector.
- FIGS. 36 (a) to 36 (e) shows an example of an end effector.
- each of the X-axis direction and the Y-axis direction is a horizontal direction (that is, a predetermined direction in the horizontal plane), and the Z-axis direction is a vertical direction (that is, a direction orthogonal to the horizontal plane). Yes, in effect, in the vertical direction).
- the rotation directions (in other words, the inclination direction) around the X-axis, the Y-axis, and the Z-axis are referred to as the ⁇ X direction, the ⁇ Y direction, and the ⁇ Z direction, respectively.
- the Z-axis direction may be the direction of gravity.
- the XY plane may be horizontal.
- machining system SYSa Processing system SYSSa of the first embodiment
- machining system SYSa the machining system SYS of the first embodiment
- machining system SYSa the machining system SYS of the first embodiment
- FIG. 1 is a cross-sectional view schematically showing the structure of the processing system SYSA of the first embodiment.
- the processing system SYS processes the coating film SF formed (for example, applied) on the surface of the object to be processed S.
- the object to be processed S may be, for example, a metal, an alloy (for example, duralumin, etc.), a resin (for example, CFRP (Carbon Fiber Reinforced Plastic), etc.), or It may be glass or an object made of any other material.
- the coating film SF is a coating film that covers the surface of the object S to be processed. Therefore, the coating film SF may be referred to as a coating layer.
- the object to be processed S serves as a base material for the coating film SF.
- the thickness of the coating film SF is, for example, tens of micrometers to hundreds of micrometers, but may be any other size.
- the paint constituting the coating film SF may contain, for example, a resin-based paint, or may contain other types of paint.
- Resin-based paints include, for example, acrylic paints (eg, paints containing acrylic polyols), polyurethane-based paints (eg, paints containing polyurethane polyols), polyester-based paints (eg, paints containing polyester polyols), It may contain at least one of a vinyl-based paint, a fluorine-based paint (for example, a paint containing a fluorine-based polyol), a silicon-based paint, and an epoxy-based paint.
- FIG. 1 shows an example in which a processing system SYSa (particularly, a processing apparatus 1 described later included in the processing system SYSa) is arranged on a processing object S having a surface along a horizontal plane (that is, an XY plane). ..
- the processing system SYSA is not always arranged on the processing object S having a surface along the horizontal plane.
- the processing system SYSA may be arranged on the processing object S having a surface intersecting a horizontal plane.
- the processing system SYSA may be arranged so as to hang from the processing object S.
- the X-axis direction and the Y-axis direction may be defined as directions along the surface of the workpiece S (typically, parallel directions) for convenience, and the Z-axis direction may be defined for convenience. It may be defined as a direction intersecting the surface of the object S to be processed (typically, a direction orthogonal to the surface).
- the processing system SYSa irradiates the coating film SF with processing light EL in order to process the coating film SF.
- the processing light EL may be any kind of light as long as the coating film SF can be processed by irradiating the coating film SF.
- the processing light EL may be a laser light.
- the processing light EL may be light of any wavelength as long as the coating film SF can be processed by irradiating the coating film SF.
- the description will proceed with reference to an example in which the processed light EL is invisible light (for example, at least one of infrared light and ultraviolet light).
- the processed light EL may be visible light.
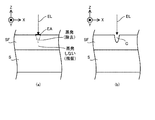
- FIGS. 2 (a) and 2 (b) are cross-sectional views schematically showing a state of processing of the coating film SF formed on the surface of the object to be processed S.
- the processing system SYSa irradiates the target irradiation region EA set on the surface of the coating film SF with the processing light EL.
- the target irradiation area EA is an area where the processing system SYSA is scheduled to irradiate the processing light EL.
- the coating film SF that overlaps with the target irradiation region EA that is, the coating film located on the ⁇ Z side of the target irradiation region EA. A part of is evaporated by the processing light EL.
- all of the coating film SF overlapping the target irradiation region EA does not evaporate. That is, in the thickness direction of the coating film SF, while a part of the coating film SF overlapping the target irradiation region EA (specifically, a portion of the coating film SF that is relatively close to the target irradiation region EA) evaporates. The other part of the coating film SF that overlaps the target irradiation region EA (specifically, the portion of the coating film SF that is relatively far from the target irradiation region EA) does not evaporate. In other words, the coating film SF evaporates only to the extent that the work object S is not exposed from the coating film SF.
- the characteristics of the processing light EL may be set to desired characteristics that evaporate the coating film SF only to the extent that the processing object S is not exposed from the coating film SF.
- the characteristics of the processing light EL may be set to desired characteristics that do not affect the processing object S by irradiation with the processing light EL.
- the characteristics of the processing light EL may be set to desired characteristics that affect only the coating film SF by irradiation with the processing light EL.
- the characteristics of the processing light EL are the wavelength of the processing light EL, the amount of energy transmitted from the processing light EL to the surface of the coating film SF per unit time and / or the amount of energy per unit area, and the surface of the coating film SF.
- It includes at least one of the intensity distribution of the processing light EL, the irradiation time of the processing light EL on the surface of the coating film SF, and the size (for example, spot diameter and area) of the processing light EL on the surface of the coating film SF. May be good.
- the energy (that is, the intensity) of the processing light EL irradiated to the coating film SF is determined so as not to affect the processing object S by the irradiation of the processing light EL.
- the energy of the processing light EL is determined so that the processing light EL does not penetrate the coating film SF and reach the processing object S. In other words, the energy of the processing light EL is determined so as to affect only the coating film SF by the irradiation of the processing light EL.
- the coating film SF is removed at the portion where the coating film SF has evaporated.
- the coating film SF remains as it is. That is, as shown in FIG. 2B, the coating film SF is partially removed in the portion irradiated with the processing light EL.
- the thickness of the coating film SF becomes thinner in the portion irradiated with the processing light EL as compared with the portion not irradiated with the processing light EL. In other words, as shown in FIG.
- the surface of the object to be processed S is irradiated with the coating film SF which remains relatively thick because the processing light EL is not irradiated, and the processing light EL. Therefore, there is a coating film SF that is relatively thin. That is, the thickness of the coating film SF is adjusted at least partially by irradiation with the processing light EL. By irradiating the processing light EL, a part of the coating film SF is removed in the thickness direction (in the example shown in FIG. 2B, the Z-axis direction). As a result, a recess (in other words, a groove) C corresponding to a portion where the coating film SF is relatively thin is formed on the surface of the coating film SF.
- the "operation of processing the coating film SF" in the first embodiment includes an operation of adjusting the thickness of the coating film SF, an operation of removing a part of the coating film SF, and forming a recess C in the coating film SF. Includes at least one of the actions.
- the coating film SF evaporates by absorbing the processing light EL. That is, the coating film SF is removed by being photochemically decomposed, for example, by transmitting the energy of the processing light EL to the coating film SF.
- the processing light EL is laser light
- the phenomenon in which the energy of the processing light EL is transmitted to the coating film SF to photochemically decompose and remove the coating film SF and the like is called laser ablation.
- the coating film SF contains a material capable of absorbing the processed light EL. Specifically, for example, the coating film SF absorbs light in a wavelength band including a wavelength band different from that of visible light when the processing light EL is invisible light.
- It may contain a material whose rate) is equal to or higher than a predetermined first absorption threshold.
- light in a wavelength band in which the absorption rate by the coating film SF is equal to or higher than a predetermined first absorption threshold value may be used as the processing light EL.
- the material constituting the coating film SF may contain a dye (specifically, for example, at least one of a pigment and a dye).
- the dye may be a dye that exhibits a desired color when irradiated with visible light.
- the coating film SF containing such a dye will exhibit a desired color.
- the dye has a first wavelength including a wavelength recognized by humans as light of a desired color by being reflected by the coating film SF in the wavelength band of visible light so that the coating film SF exhibits a desired color. It may have a characteristic that the absorption rate of light in the band is different from the absorption rate of light in the second wavelength band of visible light, which is different from the first wavelength band.
- the dye may have a characteristic that the absorption rate of light in the first wavelength band is smaller than the absorption rate of light in the second wavelength band.
- the absorption rate of light in the first wavelength band is equal to or less than a predetermined second absorption threshold (however, the second absorption threshold is smaller than the first absorption threshold), and the light in the second wavelength band is light.
- a dye that can appropriately absorb such invisible light EL and exhibits a desired color for example, a near-infrared absorbing dye manufactured by Spectrum Info Co., Ltd.
- the dye When the coating film SF contains a dye, the dye may be a dye that is transparent to visible light. As a result, the coating film SF containing such a dye becomes a transparent film (so-called clear coat).
- transparent film as used herein may mean a film through which light in at least a part of the wavelength bands of visible light can pass.
- the dye may have a property of not absorbing much visible light (that is, reflecting it correspondingly) so that the coating film SF becomes transparent.
- the dye may have a characteristic that the absorption rate of visible light becomes smaller than a predetermined fourth absorption threshold value.
- a dye that can appropriately absorb such invisible processed light EL but becomes transparent to visible light for example, a near-infrared absorbing dye manufactured by Spectrum Info Co., Ltd. (as an example, tetrafluoroboron).
- 6-Chloro-2-[(E) -2-(3- ⁇ (E) -2- [6-chloro-1-ethylbenzo [cd] indole-2 (1H) -iriden] ethylidene ⁇ -2-phenyl -1-Cyclopentene-1-yl) ethenyl] -1-ethylbenzo [cd] indole) can be mentioned.
- the processing system SYSa in order to process the coating film SF, includes a processing device 1 and a control device 2. Further, the processing device 1 includes a light irradiation device 11, a drive system 12, an accommodation device 13, a support device 14, a drive system 15, an exhaust device 16, a gas supply device 17, and a position measurement device 18. Be prepared.
- the light irradiation device 11 can irradiate the coating film SF with the processed light EL under the control of the control device 2.
- the light irradiating device 11 uses the processed light EL as shown in FIG. 3A which is a cross-sectional view schematically showing the structure of the light irradiating device 11. It includes a light source system 111 that can emit light, and an optical system 112 that guides the processed light EL emitted from the light source system 111 to the coating film SF.
- the light source system 111 emits, for example, a plurality of processed light ELs at the same time. However, the light source system 111 may emit a single processed light EL. At this time, the light irradiation device 11 may emit a single processed light EL. In order to emit a plurality of processed light ELs, the light source system 111 includes a plurality of light sources 1111 as shown in FIG. 3B, which is a cross-sectional view schematically showing an example of the structure of the light source system 111. .. The plurality of light sources 1111 are arranged in a row at equal intervals. Each light source 1111 emits pulsed light as processed light EL.
- each light source 1111 may emit pulsed light having a relatively short pulse width as processed light EL.
- each light source 1111 may emit pulsed light having a pulse width of 1000 nanoseconds or less as processed light EL.
- each light source 1111 may emit pulsed light having a pulse width on the order of picoseconds as processed light EL, or emit pulsed light having a pulse width on the order of femtoseconds as processed light EL. May be good.
- the light source system 111 is derived from a single light source 1111 and the single light source 1111.
- a branching device 1112 that branches light into a plurality of processed light ELs may be provided.
- the plurality of ejection ports from which the plurality of processed optical ELs branched by the turnout 1112 are respectively ejected are arranged in a row at equal intervals.
- the turnout 1112 at least one of an optical fiber coupler, a waveguide type splitter, a lens array, a diffractive optical element, a spatial light modulator, and the like can be mentioned.
- the optical system 112 includes a focus lens 1121, a galvanometer mirror 1122, and an f ⁇ lens 1123.
- the plurality of processed light ELs are applied to the coating film SF via the focus lens 1121, the galvanometer mirror 1122, and the f ⁇ lens 1123.
- the focus lens 1121 is composed of one or more lenses, and by adjusting the position of at least a part of the lenses along the optical axis direction, the convergence position BF of a plurality of processed optical ELs (in other words, the focusing position, Alternatively, it is an irradiation position in the optical axis direction, that is, an optical element for adjusting the focal position of the optical system 112).
- the galvano mirror 1122 is such that a plurality of processed light ELs scan the surface of the coating film SF (that is, a plurality of target irradiation regions EA irradiated with the plurality of processing light ELs move on the surface of the coating film SF). , A plurality of processed light ELs are deflected.
- the galvano mirror 1122 can function as an irradiation position changing device that changes the irradiation positions of the plurality of processed light ELs on the coating film SF with respect to the light irradiation device 11.
- the galvano mirror 1122 may allow a plurality of processed light ELks emitted by the optical system 112 to sweep the surface of the coating film SF.
- the galvano mirror 112 includes an X scanning mirror 1122X and a Y scanning mirror 1122Y.
- the X scanning mirror 1122X reflects a plurality of processed light ELs toward the Y scanning mirror 1122Y.
- the X scanning mirror 1122X can swing or rotate in the ⁇ Y direction (that is, the rotation direction around the Y axis).
- the plurality of processed optical ELs scan the surface of the coating film SF along the X-axis direction. Due to the swing or rotation of the X scanning mirror 1122X, the plurality of target irradiation regions EA move along the X-axis direction on the coating film SF.
- the X scanning mirror 1122X changes the relative positional relationship between the plurality of target irradiation regions EA and the coating film SF along the X-axis direction.
- the Y scanning mirror 1122Y reflects a plurality of processed light ELs toward the f ⁇ lens 1123.
- the Y scanning mirror 1122Y can swing or rotate in the ⁇ X direction (that is, the rotation direction around the X axis).
- the plurality of processed light ELs scan the surface of the coating film SF along the Y-axis direction. Due to the swing or rotation of the Y scanning mirror 1122Y, the plurality of target irradiation regions EA move along the Y-axis direction on the coating film SF.
- the Y scanning mirror 1122Y changes the relative positional relationship between the plurality of target irradiation regions EA and the coating film SF along the Y-axis direction.
- the f ⁇ lens 1123 is an optical element for condensing a plurality of processed light ELs from the galvano mirror 1122 on the coating film SF.
- the f ⁇ lens 1123 is located on the light emitting side of the optical system 112 among the optical elements included in the optical system 112 (in other words, it is located closest to the coating film SF or at the end of the optical path of a plurality of processed optical ELs. ) Termination optical element.
- the optical system 112 may include an optical element (for example, a cover lens or the like) provided on the light emitting side of the f ⁇ lens 1123.
- the f ⁇ lens 1123 may be configured to be removable from the optical system 112. As a result, after removing the old f ⁇ lens 1123 from the optical system 112, another f ⁇ lens 1123 can be attached to the optical system 112.
- the optical system 112 includes an optical element (for example, a cover lens) provided on the emission side of the f ⁇ lens 1123, the optical element becomes a terminal optical element and the optical element becomes the optical system 112. It may be configured to be removable.
- the traveling directions of the plurality of processed light ELs from the optical system 112 are, for example, parallel to each other.
- the coating film SF is simultaneously irradiated with a plurality of processing light ELs whose traveling directions are parallel to each other. That is, a plurality of target irradiation regions EA are simultaneously set on the coating film SF. Therefore, the throughput related to the processing of the coating film SF is improved as compared with the case where the coating film SF is irradiated with a single processing light EL.
- the traveling directions of the plurality of processed light ELs from the optical system 112 do not have to be parallel to each other.
- the light irradiation device 11 does not have to include the light source system 111.
- the light irradiation device 11 may irradiate the coating film SF with a plurality of processed light ELs emitted from the light source system 111 arranged outside the light irradiation device 11 by using the optical system 112.
- the light irradiation device 11 is provided outside the light irradiation device 11.
- a plurality of processed light ELs may be incident from the arranged light source system 111 via an optical transmission member 113 such as an optical fiber.
- the light irradiation device 11 may irradiate the coating film SF with the plurality of processed light ELs incident on the light irradiation device 11 via the transmission member 113 using the optical system 112.
- FIG. 4 shows an example in which the optical system 112 is housed in the housing 114, the optical system 112 may not be housed in the housing 114. That is, the light irradiation device 11 may or may not include the housing 114. Further, even when the light irradiation device 11 includes the light source system 111, the optical system 112 may be housed in the housing 114, or the optical system 112 may not be housed in the housing 114. Good.
- the light source system 111 may be housed in the housing 114, or the light source system 111 may not be housed in the housing 111.
- the optical transmission member 113 a light pipe, a relay optical system including one or more lenses and mirrors, and the like may be used.
- the drive system 12 under the control of the control device 2, makes the light irradiation device 11 with respect to the coating film SF (that is, with respect to the processing object S on which the coating film SF is formed on the surface). Move. That is, the drive system 12 moves the light irradiation device 11 with respect to the coating film SF so as to change the relative positional relationship between the light irradiation device 11 and the coating film SF.
- the relative positional relationship between the light irradiation device 11 and the coating film SF is changed, the relative positional relationship between the coating film SF and the plurality of target irradiation regions EA to which the plurality of processed light ELs are irradiated respectively.
- the positional relationship is also changed. Therefore, it can be said that the drive system 12 moves the light irradiation device 11 with respect to the coating film SF so as to change the relative positional relationship between the plurality of target irradiation regions EA and the coating film SF.
- the drive system 12 may move the light irradiation device 11 along the surface of the coating film SF.
- the drive system 12 since the surface of the coating film SF is a plane parallel to at least one of the X-axis and the Y-axis, the drive system 12 is irradiated with light along at least one of the X-axis and the Y-axis.
- the device 11 may be moved.
- the target irradiation region EA moves along at least one of the X-axis and the Y-axis on the coating film SF. That is, the range in which the light irradiation device 11 can irradiate the processed light EL is changed.
- the drive system 12 may move the light irradiation device 11 along the thickness direction of the coating film SF (that is, the direction intersecting the surface of the coating film SF).
- the drive system 12 may move the light irradiation device 11 along the Z-axis direction.
- the drive system 12 may move the light irradiation device 11 along at least one rotation direction in the ⁇ X direction, the ⁇ Y direction, and the ⁇ Z direction in addition to at least one of the X-axis, the Y-axis, and the Z-axis.
- the drive system 12 supports the light irradiation device 11 and moves the supporting light irradiation device 11.
- the drive system 12 may include, for example, a first support member that supports the light irradiation device 11, and a first movement mechanism that moves the first support member.
- the drive system 12 includes a first drive system 121 and a second drive system 122.
- a second drive system 121 is attached to the first drive system 121.
- the first drive system 121 supports the second drive system 122.
- the light irradiation device 11 is attached to the second drive system 122 via the attachment member 19.
- the second drive system 122 supports the light irradiation device 11 via the mounting member 19. Therefore, the second drive system 122 may substantially function as a connecting device for connecting the first drive system 121 and the light irradiation device 11.
- the second drive system 122 may support the light irradiation device 11 without going through the mounting member 19.
- the second drive system 122 may support the light irradiation device 11 by supporting the housing 114 shown in FIG.
- the first drive system 121 moves the second drive system 122 with respect to the coating film SF under the control of the control device 2. That is, the first drive system 121 functions as a moving device that moves the second drive system 122 with respect to the coating film SF. Since the light irradiation device 11 is attached to the second drive system 122, the first drive system 121 moves the light irradiation device 11 with respect to the coating film SF by moving the second drive system 122. It can be said that. That is, the first drive system 121 moves the light irradiation device 11 together with the second drive system 122. The second drive system 122 moves the second drive system 122 with respect to the coating film SF under the control of the control device 2. That is, the second drive system 122 functions as a moving device that moves the light irradiation device 11 with respect to the coating film SF.
- the accommodating device 13 includes a ceiling member 131 and a partition wall member 132.
- the ceiling member 131 is arranged on the + Z side of the light irradiation device 11.
- the ceiling member 131 is a plate-shaped member along the XY plane.
- the ceiling member 131 supports the drive system 12.
- the first drive system 121 is attached to the ceiling member 131. That is, the ceiling member 131 supports the first drive system 121.
- the second drive system 122 is attached to the first drive system 121 as described above, the second drive system 122 is attached to the ceiling member 131 via the first drive system 121. That is, the ceiling member 131 supports the second drive system 122 via the first drive system 121.
- the light irradiation device 11 is attached to the second drive system 122 as described above, the light irradiation device 11 is attached to the ceiling member 131 via the first drive system 121 and the second drive system 122. ..
- the ceiling member 131 supports the light irradiation device 11 via the first drive system 121 and the second drive system 122.
- a partition wall member 132 is arranged on the outer edge (or its vicinity) of the surface of the ceiling member 131 on the ⁇ Z side.
- the partition wall member 132 is a tubular (for example, cylindrical or rectangular tubular) member extending from the ceiling member 131 toward the ⁇ Z side.
- the space surrounded by the ceiling member 131 and the partition wall member 132 serves as an accommodation space SP for accommodating the light irradiation device 11 and the drive system 12. Therefore, the drive system 12 described above moves the light irradiation device 11 within the accommodation space SP.
- the accommodation space SP includes a space between the light irradiation device 11 and the coating film SF (particularly, a space including an optical path of the processed light EL). More specifically, the accommodation space SP includes a space between the terminal optical element (for example, f ⁇ lens 1123) included in the light irradiation device 11 and the coating film SF (particularly, a space including an optical path of the processed light EL). I'm out.
- Each of the ceiling member 131 and the partition wall member 132 is a member capable of blocking the processed light EL. That is, each of the ceiling member 131 and the partition wall member 132 is opaque with respect to the wavelength of the processed light EL. As a result, the processed light EL propagating in the accommodation space SP does not leak to the outside of the accommodation space SP (that is, the outside of the accommodation device 13).
- Each of the ceiling member 131 and the partition wall member 132 may be a member capable of dimming the processed light EL. That is, each of the ceiling member 131 and the partition wall member 132 may be translucent with respect to the wavelength of the processed light EL.
- each of the ceiling member 131 and the partition wall member 132 is a member that does not allow unnecessary substances generated by irradiation with the processing light EL to pass through (that is, can be shielded).
- An example of an unnecessary substance is the vapor of the coating film SF.
- the end portion of the partition wall member 132 (specifically, the end portion on the coating film SF side, and in the example shown in FIG. 1, the end portion on the ⁇ Z side) 134 is in contact with the surface of the coating film SF.
- the accommodating device 13 that is, the ceiling member 131 and the partition wall member 132 cooperates with the coating film SF to maintain the airtightness of the accommodating space SP.
- the shape thereof (particularly, the contact surface of the end portion 134 in contact with the coating film SF (in the example shown in FIG. 1). It is possible to change the shape of the ⁇ Z side surface), the same applies hereinafter).
- the shape of the end portion 134 becomes a flat shape similarly to the coating film SF.
- the shape of the end portion 134 becomes a curved surface shape similarly to the coating film SF.
- the airtightness of the accommodation space SP is improved as compared with the case where the end portion 134 cannot change its shape according to the shape of the surface of the coating film SF.
- An example of the end 134 whose shape can be changed is the end 134 formed of an elastic member (in other words, a flexible member) such as rubber.
- a bellows-shaped end portion having an elastic structure may be used.
- the end portion 134 may be able to adhere to the coating film SF in a state of being in contact with the coating film SF.
- the end portion 134 may be provided with an adsorption mechanism capable of adsorbing to the coating film SF.
- the airtightness of the accommodation space SP is further improved as compared with the case where the end portion 134 does not adhere to the coating film SF.
- the end portion 134 does not have to be able to adhere to the coating film SF. Even in this case, as long as the end portion 134 comes into contact with the coating film SF, the airtightness of the accommodation space SP is still maintained accordingly.
- the partition wall member 132 is a member that can be expanded and contracted along the Z-axis direction by a drive system (for example, an actuator) (not shown) that operates under the control of the control device 2.
- the partition member 132 may be a bellows-shaped member (so-called bellows).
- the partition member 132 can be expanded and contracted by expanding and contracting the bellows portion.
- the partition member 132 may include a telescopic pipe in which a plurality of hollow cylindrical members having different diameters are combined. In this case, the partition member 132 can be expanded and contracted by the relative movement of the plurality of cylindrical members.
- the state of the partition wall member 132 is at least the first extended state in which the partition wall member 132 extends along the Z-axis direction and the length in the Z-axis direction is relatively long, and the partition wall member 132 contracts along the Z-axis direction. By doing so, it is possible to set the first reduced state in which the length in the Z-axis direction is relatively short.
- the end portion 134 When the partition member 132 is in the first extended state, the end portion 134 is in the first contact state in which it can come into contact with the coating film SF. On the other hand, when the partition member 132 is in the first contracted state, the end portion 134 is in the first non-contact state in which it does not come into contact with the coating film SF. That is, when the partition member 132 is in the first reduced state, the end portion 134 is in the first non-contact state separated from the coating film SF on the + Z side.
- the configuration for switching the state of the end portion 134 between the first contact state and the first non-contact state is not limited to the configuration in which the partition wall member 132 is expanded and contracted.
- the state of the end 134 may be switched between the first contact state and the first non-contact state by making the accommodating device 13 itself movable along the ⁇ Z direction.
- the accommodating device 13 further includes a detection device 135.
- the detection device 135 detects unnecessary substances (that is, substances generated by irradiation of the processing light EL) in the accommodation space SP.
- the detection result of the detection device 135 is referred to by the control device 2 when the state of the partition wall member 132 is changed from the first extended state to the first reduced state, as will be described in detail later.
- the support device 14 supports the accommodating device 13. Since the accommodating device 13 supports the drive system 12 and the light irradiation device 11, the support device 14 substantially supports the drive system 12 and the light irradiation device 11 via the accommodating device 13.
- the support device 14 includes a beam member 141 and a plurality of leg members 142.
- the beam member 141 is arranged on the + Z side of the accommodating device 13.
- the beam member 141 is a beam-shaped member extending along the XY plane.
- the beam member 141 supports the accommodating device 13 via the support member 143.
- a plurality of leg members 142 are arranged on the beam member 141.
- the leg member 142 is a rod-shaped member extending from the beam member 141 toward the ⁇ Z side.
- the end portion of the leg member 142 (specifically, the end portion on the coating film SF side, and in the example shown in FIG. 1, the end portion on the ⁇ Z side) 144 is in contact with the surface of the coating film SF.
- the support device 14 is supported by the coating film SF (that is, by the workpiece S). That is, the support device 14 supports the accommodating device 13 in a state where the end portion 144 is in contact with the coating film SF (in other words, in a state where the support device 14 is supported by the coating film S). Similar to the end 134 of the accommodating device 13, the end portion 144 contacts the coating film SF among the end portions 144 according to the shape of the surface of the coating film SF when it comes into contact with the coating film SF.
- the end portion 144 may be attached to the coating film SF in a state of being in contact with the coating film SF.
- the end portion 144 may be provided with an adsorption mechanism capable of adsorbing to the coating film SF.
- the stability of the support device 14 is improved as compared with the case where the end portion 144 does not adhere to the coating film SF.
- the end portion 144 does not have to be able to adhere to the coating film SF.
- the beam member 141 is a member that can be expanded and contracted along at least one of the X-axis and the Y-axis (or along an arbitrary direction along the XY plane) by the drive system 15 that operates under the control of the control device 2. is there.
- the beam member 141 may include a telescopic pipe in which a plurality of tubular members having different diameters are combined. In this case, the beam member 141 can be expanded and contracted by the relative movement of the plurality of tubular members.
- the leg member 142 is a member that can be expanded and contracted along the Z-axis direction by the drive system 15 that operates under the control of the control device 2.
- the leg member 142 may include a telescopic pipe in which a plurality of tubular members having different diameters are combined.
- the leg member 142 can be expanded and contracted by the relative movement of the plurality of tubular members.
- the state of the leg member 142 is at least a second extended state in which the leg member 142 extends along the Z-axis direction and the length in the Z-axis direction is relatively long, and the leg member 142 contracts along the Z-axis direction. By doing so, it is possible to set the second reduced state in which the length in the Z-axis direction is relatively short.
- the end portion 144 When the leg member 142 is in the second extended state, the end portion 144 is in the second contact state capable of contacting the coating film SF. On the other hand, when the leg member 142 is in the second reduced state, the end portion 144 is in the second non-contact state in which it does not come into contact with the coating film SF. That is, when the leg member 142 is in the second contracted state, the end portion 144 is in the second non-contact state separated from the coating film SF on the + Z side.
- the drive system 15 moves the support device 14 with respect to the coating film SF (that is, with respect to the processing object S on which the coating film SF is formed on the surface) under the control of the control device 2. That is, the drive system 15 moves the support device 14 with respect to the coating film SF so as to change the relative positional relationship between the support device 14 and the coating film SF. Since the support device 14 supports the accommodating device 13, the drive system 15 substantially moves the accommodating device 13 with respect to the coating film SF by moving the support device 14. That is, the drive system 15 substantially moves the support device 14 with respect to the coating film SF so as to change the relative positional relationship between the accommodating device 13 and the coating film SF. Further, the accommodating device 13 supports the light irradiation device 11 via the drive system 12.
- the drive system 15 can substantially move the light irradiation device 11 with respect to the coating film SF by moving the support device 14. That is, the drive system 15 can substantially move the support device 14 with respect to the coating film SF so as to change the relative positional relationship between the light irradiation device 11 and the coating film SF. In other words, the drive system 15 may move the support device 14 with respect to the coating film SF so as to substantially change the relative positional relationship between the plurality of target irradiation regions EA and the coating film SF. it can.
- the drive system 15 expands and contracts the beam member 141 under the control of the control device 2 in order to move the support device 14. Further, the drive system 15 expands and contracts the plurality of leg members 142 under the control of the control device 2 in order to move the support device 14. The movement mode of the support device 14 by the drive system 15 will be described in detail later with reference to FIGS. 9 to 20.
- the exhaust device 16 is connected to the accommodation space SP via the exhaust pipe 161.
- the exhaust device 16 can exhaust the gas in the accommodation space SP.
- the exhaust device 16 can suck unnecessary substances generated by the irradiation of the processing light EL from the accommodation space SP to the outside of the accommodation space SP by exhausting the gas in the accommodation space SP.
- this unnecessary substance is present on the optical path of the processing light EL, it may affect the irradiation of the coating film SF with the processing light EL. Therefore, the exhaust device 16 particularly sucks unnecessary substances together with the gas in the space from the space including the optical path of the processed light EL between the terminal optical element of the optical system 112 and the coating film SF.
- the unnecessary substance sucked from the accommodation space SP by the exhaust device 16 is discharged to the outside of the processing device 1 through the filter 162.
- the filter 162 adsorbs unnecessary substances.
- the filter 162 may be removable or replaceable.
- the gas supply device 17 is connected to the accommodation space SP via an intake pipe 171.
- the gas supply device 17 can supply gas to the accommodation space SP.
- Examples of the gas supplied to the accommodation space SP include at least one of air, CDA (clean dry air) and an inert gas. Nitrogen gas is an example of an inert gas.
- the gas supply device 17 supplies the CDA. Therefore, the accommodation space SP becomes a space purged by the CDA. At least a part of the CDA supplied to the accommodation space SP is sucked by the exhaust device 16. The CDA sucked from the accommodation space SP by the exhaust device 16 passes through the filter 162 and is discharged to the outside of the processing system SYS.
- the gas supply device 17 particularly supplies a gas such as CDA to the optical surface 1124 on the accommodation space SP side of the f ⁇ lens 1123 shown in FIG. 3 (that is, the optical surface on the accommodation space SP side of the terminal optical element of the optical system 112). .. Since the optical surface 1124 faces the accommodation space SP, it may be exposed to unnecessary substances generated by irradiation with the processing light EL. As a result, unnecessary substances may adhere to the optical surface 1124. Further, since the processing light EL passes through the optical surface 1124, the processing light EL passing through the optical surface 1124 may burn (that is, stick) unnecessary substances adhering to the optical surface 1124.
- a gas such as CDA
- Unwanted substances adhering to (and further adhering to) the optical surface 1124 may become stains on the optical surface 1124 and affect the characteristics of the processed light EL.
- a gas such as CDA
- contact between the optical surface 1124 and an unnecessary substance is prevented. Therefore, the adhesion of dirt to the optical surface 1124 is prevented. Therefore, the gas supply device 17 also functions as an adhesion prevention device for preventing the adhesion of dirt to the optical surface 1124.
- the gas supply device 17 can also function as an adhesion prevention device for removing dirt adhering to the optical surface 1124.
- the position measuring device 18 measures the relative positional relationship between the coating film SF and the light irradiation device 11. That is, the position measuring device 18 measures the relative positional relationship between the processing object S and the light irradiation device 11. In the first embodiment, the position measuring device 18 measures the position of the coating film SF with respect to the light irradiation device 11. That is, the position measuring device 18 measures the position of the processing object S with respect to the light irradiation device 11.
- the position measuring device 18 may measure the coating film SF. That is, the position measuring device 18 may measure the work target SF. In this case, the position measuring device 18 may be referred to as an object measuring device because it measures an object including at least one of the coating film SF and the object S to be processed.
- the position measuring device 18 may be arranged at a fixed position with respect to the light irradiation device 11 (particularly, the optical system 112).
- the position measuring device 18 may be arranged at a position where the relative position with respect to the light irradiation device 11 is fixed.
- the position measuring device 18 may be arranged at a position where the relative positions of the light irradiation device 11 and the position measuring device 18 do not change even if the drive system 12 moves the light irradiation device 11.
- FIG. 1 shows an example in which the position measuring device 18 is attached to the attachment member 19 to which the light irradiation device 11 is attached.
- the position measuring device 18 may be attached to a member different from the attachment member 19.
- the position measuring device 18 may be attached to the light irradiation device 11.
- the position measuring device 18 may be attached to the housing 114 (see FIG. 4) described above.
- the output from the position measuring device 18 is the coating film on the light irradiation device 11. It will include information about the location of the membrane SF.
- the measurement result of the position measuring device 18 includes information regarding the position of the coating film SF with respect to the position measuring device 18. That is, the measurement result of the position measuring device 18 includes information regarding the position of the coating film SF in the measurement coordinate system of the position measuring device 18.
- the position measuring device 18 is arranged at a position fixed with respect to the light irradiation device 11, the information regarding the position of the coating film SF with respect to the position measuring device 18 is substantially the position measuring device.
- the information regarding the position of the coating film SF with respect to the light irradiation device 11 arranged at a fixed position with respect to 18 is included. Therefore, the control device 2 can appropriately specify the position of the coating film SF with respect to the light irradiation device 11.
- the position measuring device 18 may be any kind of measuring device as long as it can measure the coating film SF.
- the position measuring device 18 may include an imaging device (that is, a camera) capable of imaging an object such as a coating film SF.
- the position measuring device 18 includes an irradiation device that irradiates the coating film SF with measurement light that draws a predetermined pattern on the coating film SF, and an imaging device that images a pattern drawn on the coating film SF by the measurement light. May be good.
- the position measuring device 18 may be a measuring device that measures the coating film SF by a non-contact method (for example, at least one of a light detection method, a sound wave detection method, a radio wave detection method, and the like).
- a plurality of position measuring devices 18 may be provided.
- the measurement axes of the respective position measurement devices 18 may be in a relationship of intersecting (or twisting) with each other, and are parallel (or coaxial) with each other. ) May be.
- the control device 2 controls the overall operation of the processing system SYSa.
- the control device 2 controls the light irradiation device 11, the drive system 12, the accommodating device 13, and the drive system 15 so that the recess C having a desired shape is formed at a desired position, as will be described in detail later. ..
- the control device 2 may include, for example, a CPU (Central Processing Unit) (or a GPU (Graphics Processing Unit) in addition to or in place of the CPU) and a memory.
- the control device 2 functions as a device that controls the operation of the processing system SYS by the CPU executing a computer program.
- This computer program is a computer program for causing the control device 2 (for example, the CPU) to perform (that is, execute) the operation described later to be performed by the control device 2. That is, this computer program is a computer program for causing the control device 2 to function so that the processing system SYSa performs an operation described later.
- the computer program executed by the CPU may be recorded in a memory (that is, a recording medium) included in the control device 2, or may be an arbitrary storage medium built in the control device 2 or externally attached to the control device 2 (that is, a storage medium). For example, it may be recorded on a hard disk or a semiconductor memory). Alternatively, the CPU may download the computer program to be executed from a device external to the control device 2 via the network interface.
- a memory that is, a recording medium
- the CPU may download the computer program to be executed from a device external to the control device 2 via the network interface.
- the control device 2 may not be provided inside the processing system SYS, and may be provided, for example, as a server or the like outside the processing system SYS.
- the control device 2 and the processing system SYSA may be connected by a wired and / or wireless network (or a data bus and / or a communication line).
- a wired network for example, a network using a serial bus type interface represented by at least one of IEEE1394, RS-232x, RS-422, RS-423, RS-485 and USB may be used.
- a network using a parallel bus interface may be used.
- a network using an Ethernet (registered trademark) compliant interface represented by at least one of 10BASE-T, 100BASE-TX and 1000BASE-T may be used.
- a network using radio waves may be used.
- An example of a network using radio waves is a network conforming to IEEE802.1x (for example, at least one of wireless LAN and Bluetooth®).
- a network using infrared rays may be used.
- a network using optical communication may be used.
- the control device 2 and the processing system SYSA may be configured so that various types of information can be transmitted and received via the network.
- control device 2 may be able to transmit information such as commands and control parameters to the processing system SYSA via the network.
- the processing system SYSa may include a receiving device that receives information such as commands and control parameters from the control device 2 via the network.
- the first control device that performs a part of the processing performed by the control device 2 is provided inside the processing system SYS
- the second control device that performs the other part of the processing performed by the control device 2 is performed.
- the control device may be provided outside the processing system SYS.
- the recording medium for recording the computer program executed by the CPU includes CD-ROM, CD-R, CD-RW, flexible disk, MO, DVD-ROM, DVD-RAM, DVD-R, DVD + R, and DVD-RW. , DVD + RW and Blu-ray (registered trademark) optical disks, magnetic media such as magnetic tapes, magneto-optical disks, semiconductor memories such as USB memory, and any other medium capable of storing programs. May be good.
- the recording medium may include a device capable of recording a computer program (for example, a general-purpose device or a dedicated device in which the computer program is implemented in at least one form such as software and firmware).
- each process or function included in the computer program may be realized by a logical processing block realized in the control device 2 by the control device 2 (that is, the computer) executing the computer program. It may be realized by hardware such as a predetermined gate array (FPGA, ASIC) included in the control device 2, or a logical processing block and a partial hardware module that realizes a part of the hardware are mixed. It may be realized in the form of.
- FPGA predetermined gate array
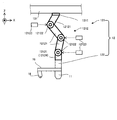
- FIG. 5 is a cross-sectional view showing the structure of the first drive system 121.
- the first drive system 121 includes a base 1211 and an arm drive system 1212.
- the base 1211 is attached to the ceiling member 131 of the accommodating device 13.
- An arm drive system 1212 is attached to the base 1211.
- the base 1211 supports the arm drive system 1211.
- the base 1211 is used as a base member for supporting the arm drive system 1211.
- the arm drive system 1212 includes a plurality of arm members 12121.
- the plurality of arm members 12121 are oscillatingly connected via at least one joint member 12122. Therefore, the arm drive system 1212 is a robot having a so-called vertical articulated structure.
- the arm drive system 1212 may include a single joint (ie, the drive shaft defined by the joint member 12122).
- the arm drive system 1212 may include a plurality of joints.
- FIG. 5 shows an example in which the arm drive system 1212 has three joints.
- FIG. 5 shows an example in which the arm drive system 1212 is provided with three actuators 12123 corresponding to three joints.
- at least one arm member 12121 moves. Therefore, at least one arm member 12121 is movable with respect to the coating film SF. That is, at least one arm member 12121 can be moved so that the relative positional relationship between the at least one arm member 12121 and the coating film SF is changed
- a second drive system 122 is attached to the arm drive system 1212. Specifically, the second drive system 122 is attached to one arm member 12121 located at the position farthest from the base 1211 among the plurality of arm members 12121.
- one arm member 12121 to which the second drive system 122 is attached is referred to as a tip arm member 12124.
- the second drive system 122 may be directly attached to the tip arm member 12124, or via another member (for example, the attachment member 1213 described with reference to FIG. 30 in the sixth embodiment described later). It may be indirectly attached to the tip arm member 12124.
- the arm drive system 1212 (that is, the first drive system 121) can move the second drive system 122.
- the arm drive system 1212 can move the second drive system 122 with respect to the coating film SF.
- the arm drive system 1212 can move the second drive system 122 so that the relative positional relationship between the second drive system 122 and the coating film SF is changed.
- the arm drive system 1212 (that is, the first drive system 121) can move the light irradiation device 11.
- the control device 2 may control the arm drive system 1212 based on the measurement result of the position measuring device 18. Specifically, the control device 2 acquires information on the relative positional relationship between the coating film SF and the light irradiation device 11 based on the measurement result of the position measurement device 18, and the coating film SF and the light irradiation device 11
- the arm drive system 1212 may be controlled based on the information regarding the relative positional relationship of the above.
- the control device 2 uses a visual servo (visual servo) based on the measurement result of the position measuring device 18 (that is, the image captured by the imaging device).
- the arm drive system 1212 may be controlled.
- the visual servo may be referred to as a vision servo.
- the light irradiation device 11 may include an acceleration sensor as a motion measurement sensor for measuring the vibration thereof. In this case, the control device 2 may control the arm drive system 1212 based on the measurement result of the acceleration sensor.
- the control device 2 may control the arm drive system 1212 so that the light irradiation device 11 moves with respect to the coating film SF. That is, the control device 2 may control the arm drive system 1212 so as to change the relative position between the light irradiation device 11 and the coating film SF. At this time, the control device 2 may control the arm drive system 1212 so as to align the coating film SF and the light irradiation device 11. The control device 2 may control the arm drive system 1212 so as to align the coating film SF with the target irradiation region EA on which the processing light EL is irradiated from the light irradiation device 11.
- control device 2 may control the arm drive system 1212 so that the target irradiation region EA is set at a desired position on the coating film SF (that is, the processing light EL is irradiated).
- the control device 2 may control the arm drive system 1212 so that the target irradiation region EA moves along a desired path on the coating film SF.
- the control device 2 may control the arm drive system 1212 by using the output from the encoder provided at the joint portion of the arm drive system 1212 and detecting the angle between the plurality of arm members 12121.
- the "relative position between the light irradiation device 11 and the coating film SF" in the first embodiment is the X-axis direction, the Y-axis direction, the Z-axis direction, and the rotation direction around the X-axis (that is, the rotation direction corresponding to the ⁇ X direction). ),
- the position measuring device 18 is the light irradiation device 11 and the coating film SF.
- the relative positional relationship between the coating film SF and the irradiation position of the processing light EL (for example, the irradiation position of the processing light EL on the coating film SF). ) May be measured.
- the position measuring device 18 may measure the irradiation position of the processing light EL on the coating film SF during at least a part of the period during which the light irradiation device 11 irradiates the coating film SF with the processing light EL. For example, in the position measuring device 18, after the light irradiation device 11 finishes irradiating the coating film SF with the processing light EL, the irradiation position of the processing light EL in the coating film SF (that is, the position where the processing light EL is actually irradiated). Therefore, for example, the position of the portion processed by the processing light EL) may be measured.
- the position measuring device 18 is a sensitive member formed on the coating film SF (specifically, a member whose characteristics change depending on the irradiation of the processing light EL, and will be described, for example, in the third embodiment described later.
- the irradiation position of the processed light EL on the sensitive member that is, the characteristics of the sensitive member change depending on the irradiation of the processed light EL. The position of the portion where the light is formed) may be measured.
- the control device 2 aligns the coating film SF with the light irradiation device 11 (that is, aligns the coating film SF with the target irradiation area EA) based on the measurement result of the position measuring device 18. ) May be controlled to control the arm drive system 1212.
- the position measuring device 18 may measure the irradiation position itself of the processing light EL. In this case, the position measuring device 18 may measure the light having the wavelength of the processing light EL.
- the first drive system 121 is not limited to the articulated robot, and may have any structure as long as the second drive system 122 can be moved with respect to the coating film SF. Good.
- the first drive system 121 may be an orthogonal multi-axis mobile body in which a plurality of linear guides are combined.
- a first linear guide is provided along a first direction in a predetermined plane, and the moving body (first moving block) of the first linear guide intersects the first direction (typically). It may be an orthogonal biaxial moving body provided with a second linear guide along the second direction (orthogonal).
- the second drive system may be attached to the moving body (second moving block) of the second linear guide.
- the moving body (second moving block) of the second linear guide in the above-mentioned orthogonal biaxial moving body may be provided with the third linear guide along the third direction intersecting the predetermined plane.
- the second drive system 122 may be attached to the moving body (third moving block) of the third linear guide.
- FIG. 6 is a cross-sectional view showing the structure of the second drive system 122.
- the second drive system 122 includes a support member 1221, a support member 1222, an air spring 1223, a damper member 1224, and a drive member 1225.
- the support member 1221 is attached to the first drive system 121. Specifically, the support member 1221 is attached to the tip arm member 12124 of the first drive system 121. The support member 1221 is fixed to the tip arm member 12124 so that the mounted surface 1221a of the support member 1221 and the mounting surface 12124a formed at the tip of the tip arm member 12124 come into contact with each other.
- the mounting surface 12124a can be regarded as a portion that moves with respect to the coating film SF as an object.
- the support member 1222 is attached to the light irradiation device 11 via the attachment member 19. The support member 1222 is fixed to the mounting member 19 so that the mounted surface 1222a of the support member 1222 and the first mounting surface 19a of the mounting member 19 come into contact with each other.
- the light irradiation device 11 is fixed to the mounting member 19 so that the second mounting surface 19b of the mounting member 19 and the mounted surface 11a formed on a part of the outer surface of the light irradiation device 11 come into contact with each other. ..
- the support member 1221 and the support member 1222 are connected via an air spring 1223, a damper member 1224, and a drive member 1225 (in other words, they are connected or are connected).
- the second surface opposite to the first surface (the surface on the + Z side in the example shown in FIG. 6) to which the first drive system 121 of the support member 1221 is attached.
- the surface on the ⁇ Z side and the fourth surface opposite to the third surface (the surface on the ⁇ Z side in the example shown in FIG. 6) to which the mounting member 19 of the support member 1222 is mounted.
- the air spring 1223, the damper member 1224, and the drive member 1225 are arranged so as to connect the support member 1221 and the support member 1222 to the surface on the + Z side. That is, each of the air spring 1223, the damper member 1224, and the drive member 1225 is attached to the support members 1221 and 1222 so as to connect the support member 1221 and the support member 1222. Since the first drive system 121 is attached to the support member 1221 and the light irradiation device 11 is attached to the support member 1222, each of the air spring 1223, the damper member 1224, and the drive member 1225 is substantially the first. It can be said that they are attached to the support members 1221 and 1222 so as to connect the drive system 121 and the light irradiation device 11.
- the air spring 1223 applies an elastic force due to the pressure of a gas (for example, air) to at least one of the support members 1221 and 1222.
- a gas for example, air
- the air spring 1223 applies an elastic force due to the pressure of the gas to at least one of the first drive system 121 and the light irradiation device 11 via at least one of the support members 1221 and 1222. ..
- the air spring 1223 supports the elastic force caused by the pressure of the gas along the direction in which the support member 1221 and the support member 1222 are aligned (in the example shown in FIG. 6, the Z-axis direction and the gravity direction). It may be applied to at least one of the members 1221 and 1222.
- the air spring 1223 is arranged along the direction in which the first drive system 121 (particularly, the tip arm member 12124) and the light irradiation device 11 are aligned (in the example shown in FIG. 6, the Z-axis direction and the gravity direction).
- An elastic force due to the pressure of the gas may be applied to at least one of the first drive system 121 and the light irradiation device 11 via at least one of the support members 1221 and 1222.
- the air spring 1223 may be referred to as an elastic member.
- Gas is supplied to the air spring 1223 from the gas supply device 12261 through the pipe 12262 and the valve 12263 in order to apply the elastic force caused by the pressure of the gas.
- the control device 2 controls at least one of the gas supply device 12261 and the valve 12263 based on the measurement result of the pressure gauge 1226 that measures the pressure of the aircraft in the air spring 1223.
- the gas supply device 12261, the pipe 12262, and the valve 12263 may be omitted.
- the air spring 1223 may apply an elastic force due to the pressure of the gas inside to at least one of the support members 1221 and 1222, regardless of the control of the control device 2.
- the air spring 1223 may support the weight of the support member 1222 by utilizing the elastic force under the control of the control device 2. Specifically, the air spring 1223 may use the elastic force to support the weight of the support member 1222 along the direction in which the support member 1221 and the support member 1222 are aligned. Since the light irradiation device 11 is attached to the support member 1222, the air spring 1223 may support the weight of the light irradiation device 11 attached to the support member 1222 by utilizing the elastic force. Specifically, the air spring 1223 uses an elastic force to support the weight of the light irradiation device 11 along the direction in which the first drive system 121 (particularly, the tip arm member 12124) and the light irradiation device 11 are aligned. You may.
- the air spring 1223 may function as a self-weight canceller that cancels the self-weight of the light irradiation device 11.
- the air spring 1223 may support the weight of the support member 1222 by utilizing the elastic force regardless of the control of the control device 2.
- the air spring 1223 uses an elastic force to reduce the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122. May be good. That is, the air spring 1223 may use the elastic force to attenuate the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122. Specifically, the air spring 1223 uses an elastic force to reduce (attenuate) vibration from the first drive system 121 to the light irradiation device 11 via the second drive system 122 (that is, transmitted). ) May.
- the air spring 1223 utilizes the elastic force from the portion of the first drive system 121 to which the second drive system 122 is attached (that is, the tip arm portion 12124) to the second of the light irradiation devices 11. Vibration toward the portion to which the drive system 122 is attached may be reduced (attenuated).
- the control device 2 reduces the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122 (that is, based on the measurement result of the pressure gauge 1226). At least one of the gas supply device 12261 and the valve 12263 may be controlled so as to be attenuated.
- the air spring 1223 (or the second drive system 122 including the air spring 1223) may be referred to as a vibration reducing device or a vibration damping device.
- the air spring 1223 uses elastic force to vibrate between the first drive system 121 and the light irradiation device 11 via the second drive system 122, regardless of the control of the control device 2. May be reduced.
- Reducing the vibration from the first drive system 121 toward the light irradiation device 11 reduces the vibration amount of the light irradiation device 11 (that is, the vibration amount) rather than the vibration amount of the first drive system 121 (that is, the amplitude of the vibration). , Smaller) may be included. Reducing the vibration from the first drive system 121 to the light irradiation device 11 is based on the vibration amount of the portion of the first drive system 121 to which the second drive system 122 is attached (that is, the tip arm portion 12124). Also, the light irradiation device 11 may include reducing the amount of vibration of the portion to which the second drive system 122 is attached.
- Reducing the vibration from the first drive system 121 toward the light irradiation device 11 means that the vibration amount of the support member 1222 to which the light irradiation device 11 is attached is larger than the vibration amount of the support member 1221 to which the first drive system 121 is attached. May include reducing. If the air spring 1223 does not reduce the vibration from the first drive system 121 to the light irradiation device 11, the vibration amount of the first drive system 121 and the vibration amount of the light irradiation device 11 are substantially the same. Become. That is, the vibration amount of the support member 1121 and the vibration amount of the support member 1122 are substantially the same.
- reducing the vibration from the first drive system 121 to the light irradiation device 11 means that the vibration from the first drive system 121 to the light irradiation device 11 is not reduced as compared with the case where the light irradiation device 11 is not reduced. It may include reducing the amount of vibration. Reducing the vibration from the first drive system 121 to the light irradiation device 11 reduces the amount of vibration of the support member 1122 as compared with the case where the vibration from the first drive system 121 to the light irradiation device 11 is not reduced. May include doing. Further, the vibration amount referred to here may mean a vibration amount with respect to some object.
- the vibration amount of the first drive system 121, the vibration amount of the light irradiation device 11, the vibration amount of the support member 1221 and the vibration amount of the support member 1222 are the coating film SF (or the object to be processed SF, the same applies hereinafter), respectively. It may mean the vibration amount of the first drive system 121 with respect to the coating film SF, the vibration amount of the light irradiation device 11 with respect to the coating film SF, the vibration amount of the support member 1221 with respect to the coating film SF, and the vibration amount of the support member 1222 with respect to the coating film SF. ..
- the damper member 1224 applies an elastic force caused by a factor different from the air pressure to at least one of the support members 1221 and 1222.
- the damper member 1224 applies an elastic force due to a factor different from the air pressure to at least one of the first drive system 121 and the light irradiation device 11 via at least one of the support members 1221 and 1222.
- the damper member 1224 applies an elastic force to at least the support members 1221 and 1222 along the direction in which the support member 1221 and the support member 1222 are aligned (in the example shown in FIG. 6, the Z-axis direction and the gravity direction). It may be given to one side.
- the damper member 1224 is arranged along the direction in which the first drive system 121 (particularly, the tip arm member 12124) and the light irradiation device 11 are aligned (in the example shown in FIG. 6, the Z-axis direction and the gravity direction).
- An elastic force may be applied to at least one of the first drive system 121 and the light irradiation device 11 via at least one of the support members 1221 and 1222.
- the damper member 1224 may be referred to as an elastic member.
- the damper member 1224 may be any member as long as elastic force can be applied.
- the damper member 1224 may include a compression spring coil.
- the damper member 1224 may include a leaf spring.
- the damper member 1224 may support the weight of the support member 1222 by utilizing the elastic force. Specifically, the damper member 1224 may use the elastic force to support the weight of the support member 1222 along the direction in which the support member 1221 and the support member 1222 are aligned. Since the light irradiation device 11 is attached to the support member 1222, the damper member 1224 may support the weight of the light irradiation device 11 attached to the support member 1222 by utilizing the elastic force. Specifically, the damper member 1224 uses elastic force to support the weight of the light irradiation device 11 along the direction in which the first drive system 121 (particularly, the tip arm member 12124) and the light irradiation device 11 are aligned. You may. In this case, the damper member 1224 may function as a self-weight canceller that cancels the self-weight of the light irradiation device 11.
- the damper member 1224 may utilize the elastic force to reduce the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122. That is, the damper member 1224 may use the elastic force to attenuate the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122. Specifically, the damper member 1224 uses elastic force to reduce (attenuate) vibration from the first drive system 121 to the light irradiation device 11 via the second drive system 122 (that is, transmitted). ) May. Therefore, the damper member 1224 (or the second drive system 122 including the damper member 1224) may be referred to as a vibration reducing device or a vibration damping device.
- the damper member 1224 may convert the vibration of the air spring 1223 into a damped vibration by utilizing the elastic force. That is, the damper member 1224 may use the elastic force to convert the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122 into a damped vibration.
- the driving member 1225 can generate a driving force under the control of the control device 2.
- the driving member 1225 can apply the generated driving force to at least one of the supporting members 1221 and 1222.
- the drive member 1225 can apply the generated driving force to at least one of the first drive system 121 and the light irradiation device 11 via at least one of the support members 1221 and 1222.
- the driving member 1225 may have any structure as long as it can generate a driving force.
- the driving member 1225 may have a structure capable of electrically generating a driving force.
- the driving member 1225 may have a structure capable of magnetically generating a driving force. As an example, FIG.
- the driving member 1225 is a voice coil motor (VCM: Voice Coil Motor) capable of electrically generating a driving force.
- VCM Voice Coil Motor
- the drive member 1225 may be a linear motor different from the voice coil motor.
- the driving member 1225 may generate a driving force along a linear axis.
- the drive member 1225 may have a structure in which the member attached to the support member 1221 of the drive member 1225 and the member attached to the support member 1222 of the drive member 1225 do not physically contact each other. ..
- the drive member 1225 is a voice coil motor
- the member attached to the support member 1221 of the drive member 1225 for example, a member including either a coil or a magnetic pole
- the member attached to the support member 1222 does not come into physical contact.
- the drive member 1225 may move at least one of the support members 1221 and 1222 by using the driving force under the control of the control device 2.
- the drive member 1225 moves at least one of the first drive system 121 and the light irradiation device 11 by moving at least one of the support members 1221 and 1222 using the driving force under the control of the control device 2. May be good.
- the drive member 1225 changes the relative position between the first drive system 121 and the light irradiation device 11 by moving at least one of the first drive system 121 and the light irradiation device 11 by using the driving force. You may.
- the "relative position between the first drive system 121 and the light irradiation device 11" in the first embodiment is the X-axis direction, the Y-axis direction, the Z-axis direction, the X-axis rotation circumference, the Y-axis rotation circumference, and Z. It means the relative position between the first drive system 121 and the light irradiation device 11 at least one around the rotation of the shaft. That is, the "relative position between the first drive system 121 and the light irradiation device 11" in the first embodiment may also include the relative posture between the first drive system 121 and the light irradiation device 11.
- the second drive system 122 including the drive member 1225 combines the first drive system 121 and the light irradiation device 11 so that the relative positions of the first drive system 121 and the light irradiation device 11 can be changed. It can be said that it is. That is, the above-mentioned air spring 1223 and damper member 1224 (further, drive member 1225) are first driven so that the relative positions of the first drive system 121 and the light irradiation device 11 can be changed by the drive member 1225. It can be said that the system 121 and the light irradiation device 11 are coupled.
- the drive member 1225 may be referred to as a position changing device.
- the position measuring device 1226 measures the relative position between the first drive system 121 and the light irradiation device 11.
- the position measuring device 1226 may be an encoder including a detection unit 12261 attached to the support member 1221 and a scale unit 12262 attached to the support member 1222.
- the measurement result of the position measuring device 1226 includes information regarding the relative position between the support member 1221 and the support member 1222.
- the control device 2 can appropriately specify the relative position between the first drive system 121 and the light irradiation device 11. As a result, the control device 2 can appropriately change the relative position between the first drive system 121 and the light irradiation device 11 based on the measurement result of the position measurement device 1227.
- the drive member 1225 changes the relative position of the first drive system 121 and the light irradiation device 11 under the control of the control device 2 (typically, the light irradiation device 11 is moved with respect to the first drive system 121.
- the light irradiation device 11 may be moved with respect to the coating film SF.
- the drive member 1225 may move the light irradiation device 11 so that the relative positional relationship between the light irradiation device 11 and the coating film SF is changed.
- the control device 2 may control the drive member 1225 based on the measurement result of the position measurement device 18 in addition to the measurement result of the position measurement device 1227.
- the control device 2 acquires information on the relative positional relationship between the coating film SF and the light irradiation device 11 based on the measurement result of the position measurement device 18, and the coating film SF and the light irradiation device 11
- the driving member 1225 may be controlled based on the information regarding the relative positional relationship of the above.
- the control device 2 may control the drive member 1225 so that the light irradiation device 11 moves with respect to the coating film SF. That is, the control device 2 may control the drive member 1225 so as to change the relative position between the light irradiation device 11 and the coating film SF.
- the control device 2 may control the drive member 1225 so as to align the coating film SF and the light irradiation device 11.
- the control device 2 may control the drive member 1225 so as to align the coating film SF with the target irradiation region EA on which the processing light EL is irradiated from the light irradiation device 11.
- the control device 2 may control the drive member 1225 so that the target irradiation region EA is set at a desired position on the coating film SF (that is, the processing light EL is irradiated).
- the control device 2 may control the drive member 1225 so that the target irradiation region EA moves along a desired path on the coating film SF.
- the first drive system 121 can also move the light irradiation device 11 with respect to the coating film SF in the same manner as the second drive system 122. That is, the processing device 1 can move the light irradiation device 11 by using both or one of the first drive system 121 and the second drive system 122.
- the movement mode of the light irradiation device 11 by the first drive system 121 may be different from the movement mode of the light irradiation device 11 by the second drive system 122.
- the positioning accuracy of the light irradiation device 11 by the first drive system 121 may be lower than the positioning accuracy of the light irradiation device 11 by the second drive system 122.
- the positioning accuracy of the light irradiation device 11 by the second drive system 122 may be higher than the positioning accuracy of the light irradiation device 11 by the first drive system 121.
- the movement accuracy of the light irradiation device 11 by the first drive system 121 (that is, the accuracy of changing the relative position between the coating film SF and the light irradiation device 11) is higher than the movement accuracy of the light irradiation device 11 by the second drive system 122. May be low. That is, the moving accuracy of the light irradiation device 11 by the second drive system 122 may be higher than the movement accuracy of the light irradiation device 11 by the first drive system 121.
- the moving range of the light irradiation device 11 by the first drive system 121 may be larger than the moving range of the light irradiation device 11 by the second drive system 122. That is, the moving range of the light irradiation device 11 by the second drive system 122 may be smaller than the moving range of the light irradiation device 11 by the first drive system 121 of the light irradiation device 11 by the first drive system 121.
- the amount of movement of the light irradiation device 11 by the first drive system 121 (that is, the amount of change in the relative position between the coating film SF and the light irradiation device 11) is larger than the amount of movement of the light irradiation device 11 by the second drive system 122.
- the amount of movement of the light irradiation device 11 by the second drive system 122 may be smaller than the amount of movement of the light irradiation device 11 by the first drive system 121.
- the control device 2 controls the first drive system 121 to align the light irradiation device 11 with respect to the coating film SF with the first accuracy, and controls the second drive system 122 to form the coating film SF.
- the light irradiation device 11 may be aligned with a second accuracy higher than the first accuracy. That is, the control device 2 controls the first drive system 121 to roughly align the light irradiation device 11 with respect to the coating film SF, and controls the second drive system 122 with respect to the coating film SF.
- the light irradiation device 11 may be aligned with high accuracy.
- the positioning accuracy of the light irradiation device 11 by the first drive system 121 can be regarded as substantially equivalent to the positioning accuracy of the tip arm member 12124 by the first drive system 121.
- the movement accuracy of the light irradiation device 11 by the first drive system 121 can be regarded as substantially equivalent to the movement accuracy of the tip arm member 12124 by the first drive system 121.
- the moving range of the light irradiation device 11 by the first drive system 121 can be regarded as substantially equivalent to the moving range of the tip arm member 12124 by the first drive system 121.
- the amount of movement of the light irradiation device 11 by the first drive system 121 can be regarded as substantially equivalent to the amount of movement of the tip arm member 12124 by the first drive system 121.
- the drive member 1225 uses the driving force to change the relative positions of the first drive system 121 and the light irradiation device 11, thereby causing the first drive system 121 and the light irradiation device 11 to change.
- the vibration transmitted between the two drive systems 122 may be reduced. That is, the driving member 1225 may use the driving force to attenuate the vibration transmitted between the first driving system 121 and the light irradiation device 11 via the second driving system 122.
- the drive member 1225 uses the driving force to reduce (attenuate) the vibration from the first drive system 121 to the light irradiation device 11 via the second drive system 122 (that is, transmitted). ) May. Therefore, the drive member 1225 (or the second drive system 122 including the drive member member 1225) may be referred to as a vibration reduction device or a vibration damping device.
- the drive member 1225 may convert the vibration of the air spring 1223 into a damped vibration by changing the relative position between the first drive system 121 and the light irradiation device 11 by using the driving force. That is, the drive member 1225 may use the driving force to convert the vibration transmitted between the first drive system 121 and the light irradiation device 11 via the second drive system 122 into damped vibration. In this case, the drive member 1225 uses the driving force to reduce the relative displacement between the first drive system 121 and the light irradiation device 11 due to the vibration from the first drive system 121 toward the light irradiation device 11. It can be said that it is doing.
- the drive member 1225 is connected to the second drive system 122 of the first drive system 121 due to the vibration from the first drive system 121 toward the light irradiation device 11 by utilizing the driving force. It can be said that the relative displacement amount between the portion (that is, the tip arm portion 12124) and the portion of the light irradiation device 11 to which the second drive system 122 is connected is reduced.
- the drive member 1225 can convert the vibration of the air spring 1223 into a damped vibration
- the second drive system 122 does not have to include the damper member 1224.
- the second drive system 122 may not include the damper member 1224.
- the number of air springs 1223, the number of damper members 1224, and the number of drive members 1225 do not have to be equal to each other.
- the processing device 1 can move the light irradiation device 11 by using both or one of the first drive system 121 and the second drive system 122 as described above, the processing device 1 is It can also be said that the vibration from the first drive system 121 to the light irradiation device 11 can be reduced by using both or one of the first drive system 121 and the second drive system 122.
- the control device 2 determines the vibration to be reduced.
- the control device 2 should use the first drive system 121 to reduce the vibration and / or use the second drive system 122 to reduce the vibration based on the frequency of the vibration to be reduced. It may be determined whether or not. Specifically, when the vibration to be reduced includes the vibration in the first frequency range, the control device 2 may determine that the vibration should be reduced by using the first drive system 121.
- the first frequency range is typically set to a frequency range that includes vibrations that can be reduced by the first drive system 121.
- the control device 2 may control the first drive system 121 so as to reduce at least a part of the vibration toward the light irradiation device 11 from the first drive system 121. Further, even if the control device 2 determines that the vibration to be reduced should be reduced by using the second drive system 122 when the vibration to be reduced includes the vibration in the second frequency range different from the first frequency range. Good.
- the second frequency range is typically set to a frequency range that includes vibrations that can be reduced by the second drive system 122. In this case, the control device 2 may control the second drive system 122 so as to reduce at least a part of the vibration from the second drive system 121 to the light irradiation device 11.
- the second frequency range is typically set. , Includes frequencies higher than the first frequency range.
- the driving member 1225 may apply a driving force that acts along the direction including the component in the direction in which the air spring 1223 and / or the damper member 1224 applies the elastic force.
- the drive member 1225 is provided along the direction including the component in the Z-axis direction.
- a driving force to act may be applied.
- the driving member 1225 When the driving member 1225 generates a driving force that acts along the direction including the component in the direction in which the air spring 1223 and / or the damper member 1224 applies the elastic force, the driving member 1225 utilizes this driving force. Therefore, the vibration of the air spring 1223 can be converted into the damping vibration.
- the driving member 1225 may change the resonance frequency of the air spring 1223 by utilizing the driving force.
- the driving member 1225 may utilize the driving force to increase the resonance frequency of the air spring 1223.
- the driving member 1225 may apply a driving force that acts along the direction in which the air spring 1223 and / or the damper member 1224 intersect in the direction in which the elastic force is applied.
- the drive member 1225 is in a direction intersecting the Z-axis direction (for example, X).
- a driving force acting along at least one of the axial direction and the Y-axis direction) may be applied.
- the driving member 1225 When the driving member 1225 generates a driving force that acts along the direction in which the air spring 1223 and / or the damper member 1224 intersects in the direction in which the elastic force is applied, the driving member 1225 utilizes this driving force. It is not necessary to perform an operation for converting the vibration of the air spring 1223 into a dampening vibration. Therefore, the load on the drive member 1225 is relatively reduced.
- a device that actively reduces vibration by using an elastic member such as an air spring 1223 and a driving member 1225 may be referred to as an active vibration isolator. Therefore, the second drive system 122 may be referred to as an active anti-vibration device.
- the active vibration isolation device may be referred to as an active vibration isolation system (AVIS: Active Vibration Isolation System).
- the machining system SYSa forms a recess C in the coating film SF.
- the recess C is formed in a portion of the coating film SF that is actually irradiated with the processing light EL. Therefore, if the position where the processing light EL is actually irradiated on the coating film SF (that is, the position where the target irradiation region EA where the processing light EL is scheduled to be irradiated is set) is appropriately set.
- the recess C can be formed at a desired position of the coating film SF. That is, it is possible to form a structure by the coating film SF on the object to be processed S.
- the processing system SYSa moves the surface of the coating film SF to the target irradiation region EA by using at least one of the galvano mirror 1122 and the drive system 12.
- the processing system SYSa targets the area of the surface of the coating film SF where the processing light EL should be actually irradiated (that is, the area to be processed) during the period when the target irradiation area EA moves on the surface of the coating film SF.
- the processing light EL is irradiated at the timing when the regions EA overlap.
- the target irradiation region EA does not overlap the region of the surface of the coating film SF where the processing light EL should actually be irradiated during the period when the target irradiation region EA moves on the surface of the coating film SF.
- the processing light EL is not irradiated at the timing. That is, the processing system SYSa is a region of the surface of the coating film SF that should not be actually irradiated with the processing light EL (that is, a region that should not be processed) while the target irradiation region EA moves on the surface of the coating film SF. ) And the target irradiation area EA overlap, the processing light EL is not irradiated.
- a structure formed by the coating film SF according to the pattern (or distribution) of the region of the coating film SF actually irradiated with the processing light EL is formed on the processing object S.
- the processing system SYSa forms a riblet structure, which is an example of the structure by such a coating film SF, on the processing object S under the control of the control device 2.
- the riblet structure is a structure capable of reducing the resistance (particularly, frictional resistance, turbulent frictional resistance) of the surface of the coating film SF to the fluid.
- the resistance to the fluid on the surface of the workpiece S on which the riblet structure is formed is smaller than the resistance to the fluid on the surface of the workpiece S on which the riblet structure is not formed. Therefore, it can be said that the riblet structure is a structure capable of reducing the resistance of the surface of the workpiece S to the fluid.
- the fluid referred to here may be a medium (gas, liquid) flowing relative to the surface of the coating film SF.
- the medium flowing with respect to the stationary work object SF and the stationary medium distributed around the moving work object SF are examples of fluids.
- FIGS. 7 (a) and 7 (b) An example of the riblet structure is shown in FIGS. 7 (a) and 7 (b).
- the riblet structure is formed, for example, along a first direction (in the example shown in FIGS. 7 (a) and 7 (b), the Y-axis direction).
- the concave structure CP1 formed by continuously forming the concave portions C that is, the concave structure CP1 formed linearly so as to extend along the first direction
- a plurality of structures are arranged along two directions (in the example shown in FIGS. 7 (a) and 7 (b), the X-axis direction).
- the riblet structure is, for example, a structure in which a plurality of concave structures CP1 extending along the first direction have a periodic direction in the second direction intersecting the first direction.
- a convex structure CP2 protruding from the periphery is substantially present between two adjacent concave structure CP1s. Therefore, in the riblet structure, for example, the convex structure CP2 extending linearly along the first direction (for example, the Y-axis direction) intersects the first direction in the second direction (for example, the X-axis direction). It can be said that the structure is arranged in a plurality of lines along the above.
- the riblet structure is, for example, a structure in which a plurality of convex structures CP2 extending along the first direction have a periodic direction in the second direction intersecting the first direction.
- the riblet structure shown in FIGS. 7 (a) and 7 (b) is a periodic structure.
- the riblet structure may be an aperiodic structure.
- the distance between two adjacent concave structure CP1s (that is, the arrangement pitch P1 of the concave structure CP1) is, for example, several microns to several hundreds of microns, but may be other sizes.
- the depth D of each concave structure CP1 (that is, the depth in the Z-axis direction) D is, for example, several microns to several hundreds of microns, but may have other sizes.
- the depth D of each concave structure CP1 may be equal to or less than the arrangement pitch P1 of the concave structure CP1.
- the depth D of each concave structure CP1 may be half or less of the arrangement pitch P1 of the concave structure CP1.
- the shape of the cross section (specifically, the cross section along the XZ plane) including the Z axis of each concave structure CP1 is a bowl-shaped curved shape, but it may be a triangle or a quadrangle. However, it may be a polygon of pentagon or more.
- the distance between two adjacent convex structure CP2s (that is, the arrangement pitch P2 of the convex structure CP2) is, for example, several microns to several hundreds of microns, but may be other sizes.
- the height (that is, the height in the Z-axis direction) H of each convex structure CP2 is, for example, several microns to several hundreds of microns, but may have other sizes.
- the height H of each convex structure CP2 may be equal to or less than the arrangement pitch P2 of the convex structure CP2.
- the height H of each convex structure CP2 may be half or less of the arrangement pitch P2 of the convex structure CP2.
- the shape of the cross section (specifically, the cross section along the XZ plane) including the Z axis of each convex structure CP2 is a chevron shape with a curved slope, but it may be a triangle or a quadrangle. It may be a pentagon or a polygon more than a pentagon.
- the riblet structure itself formed by the processing system SYSA may be an existing riblet structure as described in Chapter 5 of "Mechanical Engineering Handbook Basics ⁇ 4 Fluid Engineering” edited by the Japan Society of Mechanical Engineers. A detailed description of the structure itself will be omitted.
- the object to be processed S may be an object (for example, a structure) for which resistance to a fluid is desired to be reduced.
- the workpiece S may include an object (ie, a moving body) that is at least partially movable in a fluid (eg, at least one of a gas and a liquid).
- the object to be machined S is an aircraft PL body (for example, a fuselage PL1, a main wing PL2, a vertical tail PL3, and a horizontal stabilizer PL4.
- the processing device 1 (or the processing system SYS, hereinafter the same in this paragraph) is self-supporting on the fuselage of the aircraft PL by the support device 14. You may. Alternatively, since the end portion 144 of the leg member 142 of the support device 14 can adhere to the coating film SF, the processing device 1 is suspended from the aircraft PL by the support device 14, as shown in FIG. 8 (b). It may be attached to the fuselage of the aircraft PL so as to be lowered (that is, hung).
- the processing device 1 can be attached to the coating film SF. Even when the surface of the coating film SF is inclined with respect to the horizontal plane in a state of facing upward, the coating film SF can stand on its own. Further, the processing apparatus 1 can adhere to the coating film SF so as to hang from the coating film SF even when the surface of the coating film SF is inclined downward with respect to the horizontal plane. is there. In any case, the light irradiation device 11 can move along the surface of the airframe by the drive system 12 and / or by the movement of the support device 14.
- the processing system SYSA is applied to a processing object S such as an aircraft fuselage (that is, a processing object S having a curved surface, a surface inclined with respect to a horizontal plane, or a surface facing downward). Also, a riblet structure can be formed by the coating film SF.
- a processing object S such as an aircraft fuselage (that is, a processing object S having a curved surface, a surface inclined with respect to a horizontal plane, or a surface facing downward).
- a riblet structure can be formed by the coating film SF.
- the object to be processed S may include an automobile body or aerodynamic parts.
- the object to be processed S may include the hull of a ship.
- the processing object S may include a rocket body.
- the object to be processed S may include a turbine (for example, at least one of a hydraulic turbine, a wind turbine, and the like, particularly its turbine blade).
- the workpiece S may include parts that make up an object that is at least partially movable so as to travel in the fluid.
- the work object S may include an object whose at least a part is fixed in a flowing fluid.
- the object to be processed S may include a bridge girder installed in a river or the sea.
- the workpiece S may include a pipe through which a fluid flows. In this case, the inner wall of the pipe may be the surface of the work object S described above.
- An example of the processing object S given here is a relatively large object (for example, an object having a size on the order of several meters to several hundred meters).
- the size of the light irradiation device 11 is smaller than the size of the object to be processed S.
- the object to be processed S may be an object of any size.
- the object to be processed S may be an object with a size on the order of kilometers, centimeters, millimeters or micrometers.
- the characteristics of the riblet structure described above may be set to appropriate characteristics so that the effect of reducing friction can be appropriately obtained, depending on what kind of object the workpiece S is. That is, the characteristics of the riblet structure described above may be optimized so that the effect of reducing friction can be appropriately obtained depending on what kind of object the workpiece S is. More specifically, the characteristics of the riblet structure include the type of fluid distributed around the work object S in use (that is, in operation), the relative velocity of the work object S with respect to the fluid, and the work object. Depending on at least one such as the shape of S, it may be set to an appropriate characteristic in which the effect of reducing friction is appropriately obtained.
- the characteristics of the riblet structure described above are such that the effect of reducing friction can be appropriately obtained depending on what kind of object S is the object to be processed and in which part of the object the riblet structure is formed. It may be set to an appropriate characteristic. For example, when the object S to be processed is an aircraft PL, the characteristics of the riblet structure formed on the fuselage PL1 and the characteristics of the riblet structure formed on the main wing PL2 may be different.
- the characteristics of the riblet structure may include the size of the riblet structure.
- the size of the riblet structure includes at least one such as the arrangement pitch P1 of the concave structure CP1, the depth D of each concave structure CP1, the arrangement pitch P2 of the convex structure CP2, and the height H of each convex structure CP2. May be good.
- the characteristics of the riblet structure may include the shape of the riblet structure (for example, the shape of the cross section including the Z axis (specifically, the cross section along the XZ plane)).
- the characteristics of the riblet structure may include the stretching direction of the riblet structure (that is, the stretching direction of the concave structure CP1).
- the characteristics of the riblet structure may include the formation position of the riblet structure.
- the arrangement pitch P1 of the concave structure CP1 (that is, the arrangement pitch P2 of the convex structure CP2).
- the arrangement pitch P1 of the concave structure CP1 (that is, the arrangement pitch P2 of the convex structure CP2).
- the plurality of processed optical ELs are deflected by the galvano mirror 1122.
- the galvanometer mirror 1122 corresponds to each of the plurality of processed light ELs at a desired timing while moving the plurality of target irradiation regions EA along the Y-axis direction on the surface of the coating film SF.
- a plurality of scanning operations for irradiating the target irradiation area EA to be performed and a step operation for moving the plurality of target irradiation area EA on the surface of the coating film SF by at least a predetermined amount along the X-axis direction are alternately repeated.
- the processed light EL is deflected.
- the Y axis may be referred to as a scan axis
- the X axis may be referred to as a step axis.
- the control device 2 provides a plurality of processed shot regions SA on the surface of the coating film SF (particularly, the region of the coating film SF where the riblet structure should be formed).
- Each processing shot region SA corresponds to a region on the coating film SF capable of scanning a plurality of processing light ELs under the control of the galvanometer mirror 1122 while the light irradiation device 11 is stationary with respect to the coating film SF.
- the shape of each processed shot region SA is quadrangular, but the shape is arbitrary.
- the control device 2 controls the light irradiation device 11 so as to irradiate a part of one processing shot region SA (for example, SA1) with a plurality of processing light ELs deflected by the galvanometer mirror 1122, thereby processing the one processing.
- a riblet structure is formed in the shot region SA (SA1).
- the control device 2 controls at least one of the drive systems 12 and 15 so as to move the light irradiation device 11 with respect to the coating film SF, so that the light irradiation device 11 can be moved to another processing shot region SA (for example,).
- the SA2) is arranged at a position where a plurality of processing light ELs can be irradiated.
- control device 2 controls the light irradiation device 11 so as to irradiate the other processing shot region SA (SA2) with a plurality of processing light ELs deflected by the galvanometer mirror 1122, thereby causing the other processing shot region.
- SA processing shot region
- a riblet structure is formed in SA.
- the control device 2 forms a riblet structure by repeating the following operations for all the machined shot areas SA1 to SA16.
- the operation of forming the riblet structure in the machining shot regions SA1 to SA4 shown in FIG. 9 will be described as an example.
- an example will be described in which two machining shot regions SA adjacent to each other along the X-axis direction are located in the accommodation space SP.
- the same operation is still performed.
- the operation of forming the riblet structure shown below is only an example, and the processing system SYS may perform an operation different from the operation shown below to form the riblet structure.
- the processing system SYS may perform any operation as long as it is possible to irradiate the processing object S with a plurality of processing light ELs to form a riblet structure on the processing object S.
- the control device 2 controls the drive system 15 so that the accommodation device 13 is arranged at the first accommodation position where the machining shot areas SA1 and SA2 are located in the accommodation space SP.
- the support device 14 is moved with respect to the coating film SF. That is, the control device 2 moves the accommodating device 13 supported by the support device 14 so that the machining shot areas SA1 and SA2 are covered by the accommodating device 13.
- the control device 2 controls the drive system 12 (that is, so that the light irradiation device 11 is arranged at the first irradiation position capable of irradiating the processing shot region SA1 with a plurality of processing light ELs (that is,).
- the light irradiation device 11 is moved with respect to the coating film SF.
- the partition wall member 132 is in the first extended state. Therefore, the end 134 of the partition member 132 comes into contact with and adheres to the coating film SF.
- the plurality of leg members 142 are in the second extended state. Therefore, the end portions 144 of the plurality of leg members 142 come into contact with and adhere to the coating film SF.
- the control device 2 uses the light irradiation device 11 (particularly, the galvano mirror 1122) so that the plurality of processing light ELs scan the processing shot region SA1.
- the control device 2 scans a certain area in the machined shot area SA1 along the Y-axis direction in order to perform the scanning operation described above, so that the Y of the galvano mirror 1122 Controls the scanning mirror 1122Y.
- the light source system 111 emits a plurality of processed light ELs.
- the control device 2 rotates at least the X scanning mirror 1122X of the galvano mirror 1122 by a unit step amount in order to perform the step operation described above.
- the control device 2 scans a certain area in the processing shot area SA1 along the Y-axis direction so that the Y scanning mirror 1122Y of the galvano mirror 1122 To control. In this way, the control device 2 alternately repeats the scanning operation and the step operation to process the entire processing shot area SA1 (or a part of the processing shot area SA1 where the riblet structure should be formed).
- the galvano mirror 1122 is controlled so that the optical EL scans. It should be noted that a plurality of processed light ELs may be emitted while the step operation is being performed.
- FIG. 12 is a plan view showing the scanning locus of the processed light EL (that is, the moving locus of the target irradiation region EA) during the period in which the scanning operation and the step operation are repeated.
- the processing apparatus 1 sequentially scans a plurality of scan areas SCA set in the processing shot area SA.
- FIG. 12 shows an example in which six scan areas SCA # 1 to SCA # 6 are set in the machining shot area SA.
- Each scan area SCA is an area scanned by a plurality of processed light ELs irradiated in one scan operation (that is, a series of scan operations that do not sandwich a step operation).
- Each scan area SCA is an area in which a plurality of target irradiation areas EA move in one scan operation. In this case, in one scan operation, the target irradiation area EA moves from the scan start position SC_start of each scan area SCA toward the scan end position SC_end.
- a scanning region SCA is typically a region extending along the Y-axis direction (that is, the scanning direction of the plurality of processed light ELs).
- the plurality of scan areas SCA are arranged along the X-axis direction (that is, the direction intersecting the scan directions of the plurality of processed light ELs).
- the machining system SYSa starts the scanning operation from, for example, one scan area SCA located on the most + X side or the most ⁇ X side of the plurality of scan area SCA set in a certain machining shot area SA.
- FIG. 12 shows an example in which the processing system SYSa starts the scanning operation from the shot area SCA # 1 located on the most ⁇ X side.
- the control device 2 can irradiate the scan start position SC_start # 1 of the scan area SCA # 1 (for example, the end on the ⁇ Y side in the scan area SCA # 1 or its vicinity) with the processing light EL.
- the galvano mirror 1122 is controlled so as to be.
- the control device 2 controls the galvano mirror 1122 so that the target irradiation region EA is set at the scan start position SC_start # 1 of the scan region SCA # 1.
- the processing system SYSa performs a scanning operation on the scanning area SCA # 1.
- the control device 2 has a scan start position SC_start # 1 in the scan area SCA # 1 to a scan end position SC_end # 1 in the scan area SCA # 1 (for example, an end portion on the + Y side in the scan area SCA # 1).
- the galvano mirror 1122 is controlled so that the plurality of target irradiation regions EA move toward (or in the vicinity thereof).
- control device 2 controls the light irradiation device 11 so that each of the plurality of processed light ELs irradiates the corresponding target irradiation region EA at a desired timing.
- the scan area SCA # 1 is scanned by the plurality of processed optical ELs.
- FIG. 12 shows the movement locus of one target irradiation area EA in each scan area SCA for simplification of the drawing, in reality, a plurality of target irradiation areas in each scan area SCA are shown. EA moves. That is, in FIG. 12, for the sake of simplification of the drawing, the scanning locus of one processing light EL in each scanning area SCA is shown, but in reality, each scanning area SCA is scanned by a plurality of processing light ELs. Will be done.
- the processing system SYSa performs a step operation in order to perform the scanning operation for another scanning area SCA different from the scanning area SCA # 1.
- the control device 2 has a scan start position SC_start # 2 (for example, ⁇ Y in the scan area SCA # 2) of the scan area SCA # 2 adjacent to the scan area SCA # 1 along the X-axis direction.
- the galvano mirror 1122 is controlled so that the processing light EL can be applied to the side end (or its vicinity). That is, the control device 2 controls the galvanometer mirror 1122 so that the target irradiation region EA is set at the scan start position SC_start # 2 of the scan region SCA # 2.
- the target irradiation position EA moves along the X-axis direction and the Y-axis direction, respectively.
- the amount of movement of the target irradiation position EA in the X-axis direction may be the same as the size of the scan region SCA in the X-axis direction.
- the amount of movement of the target irradiation position EA in the Y-axis direction may be the same as the size of the scan region SCA in the Y-axis direction.
- the processing system SYSa performs a scanning operation on the scanning area SCA # 2.
- the control device 2 has a scan start position SC_start # 2 in the scan area SCA # 2 to a scan end position SC_end # 2 in the scan area SCA # 2 (for example, an end portion on the + Y side in the scan area SCA # 2).
- the galvano mirror 1122 is controlled so that the plurality of target irradiation regions EA move toward or near the target irradiation region EA.
- the control device 2 controls the light irradiation device 11 so that each of the plurality of processed light ELs irradiates the corresponding target irradiation region EA at a desired timing. As a result, the scan area SCA # 2 is scanned by the plurality of processed optical ELs.
- the scanning direction of the processing light EL by the scanning operation is fixed in the + Y axis direction.
- the moving direction of the target irradiation area EA by the scanning operation is fixed in the + Y axis direction. That is, in the example shown in FIG. 12, the scanning directions of the processed light EL by the scanning operation performed a plurality of times in the processed shot area SA (that is, the moving direction of the target irradiation area EA, hereinafter the same) are the same as each other.
- the scanning directions of the plurality of processed optical ELs that scan the plurality of scanning areas SCA are the same as each other.
- the moving directions of the target irradiation area EA within the plurality of scan area SCA are the same as each other.
- the scanning direction of the processed light EL by the scanning operation performed on the scan area SCA # 1 the scanning direction of the processed light EL by the scanning operation performed on the scan area SCA # 2, ...
- the scanning directions of the processed optical EL by the scanning operation performed on the scanning area SCA # 6 are the same as each other.
- the width of the region scanned by the processing light EL (that is, the width of the processing shot region SA, particularly the width in the X-axis direction) is the light irradiation device 11. (Especially the width in the X-axis direction).
- the position shift of the target irradiation region EA may occur due to the operation of the galvano mirror 1122.
- the temperature of the galvano mirror 1122 may change (typically rise).
- the characteristics of the galvano mirror 1122 may change as compared to before the temperature of the galvano mirror 1122 changes.
- the position of the target irradiation area EA with respect to the galvanometer mirror 1122 may change (that is, the position of the target irradiation area EA may shift).
- the control device 2 controls the drive system 12 so as to reduce the misalignment of the target irradiation region EA (that is, bring the target irradiation region EA closer to the original position) to light the coating film SF. 11 may be moved.
- the control device 2 controls the first drive system 121 so as to reduce the misalignment of the target irradiation region EA (for example, reduce the amount of misalignment) so that the light irradiation device 11 is applied to the coating film SF. You may move it.
- control device 2 controls the second drive system 122 (particularly, the drive member 1225) to move the light irradiation device 11 with respect to the coating film SF so as to reduce the displacement of the target irradiation region EA. May be good.
- the control device 2 controls the drive system 15 so that the plurality of leg members 142 are maintained in the second extended state during the period in which the light irradiation device 11 is irradiating the processing light EL. As a result, the end portions 144 of the plurality of leg members 142 continue to adhere to the coating film SF. As a result, the stability of the support device 14 is improved, so that the possibility that the target irradiation region EA of the processed light EL is unintentionally shifted on the coating film SF due to the instability of the support device 14 is reduced. ..
- the support device 14 can stand on the coating film SF (or can adhere to the coating film SF so as to be suspended from the coating film SF) during at least a part of the period during which the light irradiation device 11 is irradiating the light EL. As long as it is, a part of the plurality of leg members 142 may be in the second reduced state.
- the control device 2 includes a drive system (not shown) that expands and contracts the partition member 132 so that the partition member 132 is maintained in the first extended state during the period when the light irradiation device 11 is irradiating the processing light EL. Control. As a result, the end 134 of the partition member 132 continues to adhere to the coating film SF. As a result, since the airtightness of the accommodation space SP is maintained, the processed light EL propagating in the accommodation space SP does not leak to the outside of the accommodation space SP (that is, the outside of the accommodation device 13). Further, unnecessary substances generated in the accommodation space SP do not leak to the outside of the accommodation space SP (that is, the outside of the accommodation device 13).
- the control device 2 detects that at least a part of the end portion 134 is separated from the coating film SF during the period in which the light irradiation device 11 is irradiating the processing light EL, the control device 2 irradiates the processing light EL.
- the light irradiation device 11 may be controlled so as to stop.
- the light irradiation device 11 can irradiate the processing shot region SA2 with a plurality of processing light ELs from the first irradiation position.
- the drive system 12 is controlled so as to move to the irradiation position.
- the control device 2 controls the light irradiation device 11 so that the light irradiation device 11 does not irradiate the processed light EL.
- the control device 2 uses the light irradiation device 11 (particularly, the galvano mirror 1122) so that the plurality of processing light ELs scan the processing shot region SA2.
- the control device 2 alternately repeats the above-mentioned scanning operation and the above-mentioned step operation to form the entire machining shot region SA2 (or a part of the machining shot region SA2 where the riblet structure should be formed).
- the light irradiation device 11 is controlled.
- a riblet structure is formed in the processed shot region SA2.
- the plurality of recesses CP1 constituting the riblet structure in the machining shot region SA1 are the plurality of recesses constituting the riblet structure in the machining shot region SA2 (or other machining shot region SA) adjacent to the machining shot region SA1. It may be formed so as to be continuously connected to each of the CP1s. Alternatively, the plurality of recesses CP1 constituting the riblet structure in the machined shot region SA1 may be formed so as not to be connected to each other with each of the plurality of recesses CP1 forming the riblet structure in the machined shot area SA2.
- the continuous length of one recess CP1 formed as a result of scanning the machining light EL in the machining shot region SA is the size of the machining shot region SA (particularly, in the Y-axis direction which is the scanning direction of the machining light EL). Size) depends. Therefore, when the size of the machining shot region SA is large enough to realize the continuous length in which the riblet structure can fulfill the above-mentioned functions, the plurality of recesses CP1 constituting the riblet structure in the machining shot region SA1 are machined. It may be formed so as not to be connected to each of the plurality of recesses CP1 constituting the riblet structure in the shot region SA2.
- the continuous length at which the riblet structure can perform the above-mentioned functions is the airspeed and turbulence phenomenon during aircraft use (typically during cruising). According to the calculation based on the frequency, it is about several mm. Therefore, when the machining shot region SA having a size larger than about several mm in the Y-axis direction can be set on the surface of the coating film SF, a plurality of recesses CP1 constituting the riblet structure in the machining shot region SA1 May be formed so as not to be connected to each of the plurality of recesses CP1 constituting the riblet structure in the machined shot region SA2.
- the control device 2 moves the support device 14 (that is, the accommodation device 13). By moving it), the drive system 15 is controlled so that the machining shot region SA in which the riblet structure has not yet been formed is newly located in the accommodation space SP.
- the control device 2 expands and contracts the partition member 132 so that the state of the partition member 132 switches from the first extended state to the first contracted state. To control. As a result, the end 134 of the partition member 132 is separated from the coating film SF.
- the control device 2 controls the light irradiation device 11 so that the light irradiation device 11 does not irradiate the processing light EL. Therefore, even if the end portion 134 is separated from the coating film SF, there is no possibility that at least one of the processed light EL and the unnecessary substance leaks to the outside of the accommodating device 13.
- the control device 2 determines whether or not to switch the partition wall member 132 from the first extended state to the first reduced state based on the detection result of the detection device 135 that detects unnecessary substances in the accommodation space SP. You may.
- the control device 2 When unnecessary substances remain in the accommodation space SP, the control device 2 does not have to switch the partition wall member 132 from the first extended state to the first reduced state. In this case, the exhaust device 16 continues to suck the unnecessary substances remaining in the accommodation space SP. On the other hand, when no unnecessary substance remains in the accommodation space SP, the control device 2 may switch the partition wall member 132 from the first extended state to the first reduced state.
- control device 2 moves with respect to the coating film SF with the movement of the support device 14 among the plurality of leg members 142 (particularly, the contracted extension of the beam member 141 as described later).
- the drive system 15 is controlled so that the state of the leg member 142 of the portion is switched from the second extended state to the second contracted state.
- the leg member 142 that moves with respect to the coating film SF with the extension of the beam member 141 that has been reduced is typically the moving direction of the support device 14 among the plurality of leg members 142 (that is, the accommodating device 13).
- the leg member 142 is located on the front side in the moving direction). In the example shown in FIG.
- the support device 14 moves toward the + X side, and the leg member 142 located on the front side in the moving direction of the support device 14 is the leg member 142 located on the + X side.
- the leg member 142 located on the front side in the moving direction of the support device 14 will be referred to as a "front leg member 142".
- the end portion 144 of the front leg member 142 is separated from the coating film SF.
- the control device 2 moves the accommodating device 13 from the first accommodating position to the second accommodating position where the processing shot areas SA3 and SA4 are located in the accommodating space SP.
- the drive system 15 is controlled. Specifically, the control device 2 controls the drive system 15 so that the beam member 141 extends along the moving direction of the support device 14. As a result, the beam member 141 extends while supporting the accommodating device 13 (furthermore, while supporting the light irradiation device 11 supported by the accommodating device 13). Further, in parallel with the movement of the support device 14, the control device 2 allows the light irradiation device 11 to irradiate the processing shot region SA3 with a plurality of processing light ELs from the second irradiation position.
- the drive system 12 is controlled so as to move to the third irradiation position.
- the support device 14 can self-propell in a state of being supported by the object to be processed S. Therefore, the support device 14 may be referred to as a self-propelled device.
- the control device 2 controls the partition member 2 so that the partition member 132 is maintained in the first reduced state. It controls a drive system (not shown) that expands and contracts 132.
- the movement of the support device 14 that is, the movement of the accommodating device 13
- the coating film SF is not damaged by the contact between the end portion 134 and the coating film SF during the movement of the support device 14.
- the contact between the end 134 and the coating film SF does not hinder the movement of the support device 14, at least a part of the end 134 during at least a part of the period in which the support device 14 is moving. May be in contact with the coating film SF. If the coating film SF is not damaged by the contact between the end 134 and the coating film SF during the movement of the support device 14, the end 134 may have at least a part of the period during which the support device 14 is moving. At least a part may be in contact with the coating film SF.
- the control device 2 controls the drive system 15 so that the front leg member 142 is maintained in the second contracted state.
- the movement of the support device 14 (that is, the movement of the accommodating device 13) is not hindered by the contact between the end portion 144 of the front leg member 142 and the coating film SF.
- the coating film SF is not damaged by the contact between the end portion 144 and the coating film SF during the movement of the support device 14.
- the contact between the end portion 144 and the coating film SF does not hinder the movement of the support device 14, at least a part of the end portion 144 during at least a part of the period in which the support device 14 is moving. May be in contact with the coating film SF.
- the end 144 may have at least a part of the period during which the support device 14 is moving. At least a part may be in contact with the coating film SF.
- the control device 2 keeps the leg members 142 other than the front leg members 142 in the first extended state among the plurality of leg members 142.
- the drive system 15 is controlled.
- the support device 14 can stand on the coating film SF (or is suspended from the coating film SF) as in the case where all the end portions 144 of the plurality of leg members 142 are in contact with the coating film SF. It can adhere to the coating film SF).
- control device 2 controls the light irradiation device 11 so that the light irradiation device 11 does not irradiate the processing light EL.
- the control device 2 expands and contracts the partition wall member 132 so that the partition wall member 132 switches from the first contracted state to the first extended state. Controls a drive system (not shown). As a result, the end 134 of the partition member 132 comes into contact with and adheres to the coating film SF. Further, the control device 2 controls the drive system 15 so that the front leg member 142 switches from the second contracted state to the second extended state. As a result, the end portion 144 of the front leg member 142 comes into contact with and adheres to the coating film SF.
- the extension operation of the partition wall member 132 and the extension operation of the front leg member 142 may be performed at the same time, or may be performed with a time lag.
- the control device 2 moves the support device 14 among the plurality of leg members 142 (particularly, as will be described later, the stretched beam member 141 shrinks) and the coating film SF.
- the drive system 15 is controlled so that the state of at least a part of the leg members 142 moving with respect to the leg member 142 is switched from the second extended state to the second contracted state.
- the leg member 142 that moves with respect to the coating film SF as the extended beam member 141 shrinks is typically a leg located on the rear side of the plurality of leg members 142 in the moving direction of the support device 14. It is a member 142. In the example shown in FIG.
- the leg member 142 located on the rear side in the moving direction of the support device 14 is the leg member 142 located on the ⁇ X side.
- the leg member 142 located on the rear side in the moving direction of the support device 14 will be referred to as a “rear leg member 142”.
- the end portion 144 of the rear leg member 142 is separated from the coating film SF.
- control device 2 controls the drive system 15 so that the beam member 141 extending along the moving direction of the support device 14 shrinks.
- the control device 2 controls the drive system 15 so that the rear leg member 142 switches from the second reduced state to the second extended state. As a result, the end portion 144 of the rear leg member 142 comes into contact with and adheres to the coating film SF.
- control device 2 causes the light irradiation device 11 so that the plurality of processing light ELs scan the processing shot areas SA3 and SA4 in the same manner as when the plurality of processing light ELs scan the processing shot areas SA1 and SA2.
- a plurality of processing light ELs are applied to the surface of the coating film SF (particularly, the region of the coating film SF where the riblet structure should be formed).
- a riblet structure formed by the coating film SF is formed on the object to be processed S.
- the processing light EL is applied to the processing object S (particularly, the coating film SF formed on the surface thereof).
- a riblet structure formed by the coating film SF can be formed on the surface of the object to be processed S.
- the machining system SYSa creates a riblet structure relatively easily and in a relatively short time as compared with a machining device that forms a riblet structure by scraping the surface of the object S to be machined with a cutting tool such as an end mill. Can be formed.
- the processing system SYSa can simultaneously irradiate a plurality of processing light ELs to form a plurality of concave structure CP1s at the same time. Therefore, the throughput related to the formation of the riblet structure is improved as compared with the processing apparatus capable of forming only a single concave structure CP1 at a time by irradiating a single processing light EL.
- the processing system SYSa can deflect a plurality of processing light ELs by the galvano mirror 1122 to scan the coating film SF at a relatively high speed. Therefore, the throughput for forming the riblet structure is improved.
- the processing system SYSa processes the coating film SF formed on the surface of the processing object S instead of directly processing the processing object S, thereby forming a riblet on the surface of the processing object S. Structures can be formed. Therefore, with a processing system that forms a riblet structure by newly adding (for example, pasting) a special material for forming the riblet structure to the surface of the processing object S (that is, the surface of the coating film SF). In comparison, an increase in the weight of the workpiece S due to the formation of the riblet structure can be avoided.
- the processing system SYSa since the processing system SYSa does not directly process the object S to be processed, the riblet structure can be reshaped relatively easily. Specifically, when reforming the riblet structure, the riblet structure is first peeled off by the coating film SF, and then a new coating film SF is applied. After that, the processing system SYSa can form a new riblet structure by processing the newly applied coating film SF. Therefore, deterioration of the riblet structure (for example, breakage) can be dealt with relatively easily by reforming the riblet structure.
- the processing system SYSA does not directly process the processing object S
- the riblet structure can be formed on the surface of the processing object S which is difficult to be directly processed or the riblet structure is not originally formed. it can. That is, if the coating film SF is processed by the processing system SYS after the coating film SF is applied to the surface of the object S to be processed, the riblet structure can be formed relatively easily.
- the operation of processing the processing object S is to apply the coating film SF to the processing object S (that is, to form the coating film SF).
- Operation and the operation of processing the coating film SF may be included.
- the operation of applying the coating film SF to the object to be processed S may be performed by the processing system SYS.
- the processing system SYSA may be provided with a coating device for applying the coating film SF to the processing object S.
- the operation of applying the coating film SF to the object to be processed S may be performed outside the processing system SYS.
- the operation of applying the coating film SF to the object S to be processed may be performed by an external coating device of the processing system SYS.
- the processing system SYSa can form a riblet structure by the coating film SF.
- the coating film SF usually has relatively high durability to an external environment (for example, at least one of heat, light, wind, etc.). Therefore, the processing system SYSa can relatively easily form a riblet structure having relatively high durability.
- the optical path of the processed light EL between the terminal optical element of the optical system 112 and the coating film SF is included in the accommodation space SP. Therefore, the processing light EL (or the processing concerned) irradiated to the coating film SF is compared with the processing system in which the optical path of the processing light EL is not included in the accommodation space SP (that is, it is open to the open space). It is possible to appropriately prevent the scattered light or the reflected light from the coating film SF of the optical EL from propagating (in other words, being scattered) around the processing system SYS. Further, it is possible to appropriately prevent unnecessary substances generated by the irradiation of the processing light EL from propagating (in other words, scattering) around the processing system SYS.
- the light irradiation device 11 is supported by the support device 14 that can move on the coating film SF. Therefore, the processing system SYSa can process the coating film SF that spreads over a relatively wide range relatively easily. That is, the processing system SYSa can form a riblet structure by the coating film SF over a relatively wide range on the surface of the processing object S. Further, since the processing system SYSa does not have to move the processing object S, the riblet structure can be relatively easily formed on the surface of the relatively large or heavy processing object S.
- the processing system SYSa can suck the unnecessary substances generated by the irradiation of the processing light EL to the outside of the accommodation space SP by using the exhaust device 16. Therefore, the irradiation of the coating film SF with the processing light EL is hardly hindered by unnecessary substances. Therefore, the irradiation accuracy of the processing light EL is improved as compared with a processing system that does not have the exhaust device 16 (that is, the irradiation of the coating film SF with the processing light EL may be hindered by an unnecessary substance). .. As a result, the accuracy of forming the riblet structure is improved.
- the processing device 1 can prevent the adhesion of dirt to the optical surface 1124 (that is, the optical surface on the accommodation space SP side of the terminal optical element of the optical system 112) by using the gas supply device 17. Therefore, as compared with the processing apparatus not provided with the gas supply apparatus 17, the possibility that the irradiation of the coating film SF with the processing light EL is hindered by the dirt adhering to the optical surface 1124 is reduced. Therefore, the irradiation accuracy of the processed light EL is improved. As a result, the accuracy of forming the riblet structure is improved.
- the processing device 1 can move the light irradiation device 11 with respect to the coating film SF by using the drive system 12 including the first drive system 121 and the second drive system 122. Therefore, the processing device 1 can appropriately move the light irradiation device 11 with respect to the coating film SF. Specifically, if the light irradiation device 11 is moved using only the first drive system 121 (that is, without using the second drive system 122), the positioning accuracy of the light irradiation device 11 is correspondingly high. It becomes difficult to do.
- the positioning accuracy of the light irradiation device 11 by the first drive system 121 is the accuracy obtained by integrating the movement accuracy (that is, the swing accuracy or the rotation accuracy) of the plurality of joints of the first drive system 121.
- the positioning accuracy of the light irradiation device 11 by the first drive system 121 is higher than that of the first drive system 121. Is also enhanced by the second drive system 122, which has high positioning accuracy.
- the positioning accuracy of the light irradiation device 11 as a whole of the drive system 12 including the first drive system 121 and the second drive system 122 can be determined by the light irradiation device 11 by the first drive system 121. It can be higher than the positioning accuracy. Therefore, the processing device 1 can move the light irradiation device 11 appropriately (for example, with high accuracy) with respect to the coating film SF as compared with the case where the second drive system 122 is not provided.
- the drive system 12 includes, in addition to the second drive system 122, a first drive system 121 capable of increasing the moving range of the light irradiation device 11 as compared with the second drive system 122, the first drive system 12 is provided.
- the moving range of the light irradiation device 11 is larger than that of the drive device of the comparative example in which the second drive system 122 is provided without the drive system 121.
- the processing system SYSA mainly uses the first drive system 121 to increase the moving range of the light irradiation device 11 correspondingly, and mainly uses the second drive system 122 to increase the movement range of the light irradiation device 11.
- the movement accuracy can be improved accordingly. That is, the processing system SYSa can achieve both a wide range of movement of the light irradiation device 11 and an improvement of the movement accuracy of the light irradiation device 11.
- the need to increase the positioning accuracy of the light irradiation device 11 by the first drive system 121 is reduced. Therefore, in order to increase the positioning accuracy of the light irradiation device 11 by the first drive system 121, it is not necessary to increase the rigidity of the first drive system 121 (for example, the rigidity of the arm member 12121). As a result, the weight of the first drive system 121 can be reduced. Further, as the weight of the first drive system 121 is reduced, the actuator 12123 for moving the arm member 12121 can be miniaturized.
- the vibration amount of 11 can be made smaller.
- the settling time of the light irradiation device 11 can be shortened, and the total throughput can be improved.
- the formation accuracy of the riblet structure can be improved.
- the arm drive system 1212 is controlled based on the measurement result of the position measuring device 18, the positioning accuracy of the light irradiation device 11 can be improved.
- FIG. 21 is a cross-sectional view schematically showing the overall structure of the processing system SYSb of the second embodiment.
- the processing system SYSb of the second embodiment is different from the processing system SYSa of the first embodiment in that it includes a processing device 1b instead of the processing device 1.
- Other features of the machining system SYSb may be the same as the other features of the machining system SYS.
- the processing device 1b is different from the processing device 1 in that the position measuring device 18b is provided instead of the position measuring device 18.
- Other features of the processing device 1b may be the same as other features of the processing device 1.
- the position measuring device 18b measures the relative positional relationship between the coating film SF and the light irradiation device 11 in the same manner as the position measuring device 18.
- the position measuring device 18b measures the position of the light irradiation device 11 with respect to a predetermined reference position as compared with the position measuring device 18 described above. Specifically, the position measuring device 18b measures the position of the light irradiation device 11 in the reference coordinate system in which the reference position is defined.
- the reference position may be, for example, the origin of the reference coordinate system.
- a measurement coordinate system used by the position measuring device 18b to measure the relative positional relationship between the coating film SF and the light irradiation device 11 is used. However, other coordinate systems may be used as the reference coordinate system.
- the coating film SF and light irradiation can be measured by measuring the relative positional relationship between the reference position in the reference coordinate system and the light irradiation device 11 by the position measuring device 18b.
- the relative positional relationship with the device 11 is required. That is, it can be said that the position measuring device 18b indirectly measures the relative positional relationship between the coating film SF and the light irradiation device 11.
- the position measuring device 18b includes an index member 181b and an index measuring device 182b.
- the index member 181b is a member that serves as an index when measuring the position of the light irradiation device 11 with respect to the reference position.
- the index member 181b is arranged at a fixed position with respect to the light irradiation device 11 (particularly, the optical system 112).
- the index member 181b is arranged at a position where the relative position with respect to the light irradiation device 11 is fixed.
- the index member 181b is arranged at a position where the relative position between the light irradiation device 11 and the index member 181b does not change even if the drive system 12 moves the light irradiation device 11.
- the index member 181b is arranged on the mounting member 19 to which the light irradiation device 11 is mounted.
- the index member 181b may be attached to a member different from the attachment member 19.
- the index member 181b may be attached to the light irradiation device 11.
- the index member 181b may be attached to the housing 114 (see FIG. 4) described above.
- the index measuring device 182b measures the position of the index member 181b.
- the index measuring device 182b may be any measuring device as long as the position of the index measuring member 181b can be measured.
- the index measuring device 182b may be arranged at any position as long as the position of the index measuring member 181b can be measured.
- the output from the index measuring device 182b includes information regarding the position of the light irradiation device 11 with respect to the reference position.
- the measurement result of the index measuring device 182b includes information regarding the position of the index member 181b with respect to the reference position. That is, the measurement result of the index measuring device 182b includes information regarding the position of the index member 181b in the reference coordinate system.
- the control device 2 can appropriately specify the position of the light irradiation device 11 with respect to the reference position.
- the index member 181b is a marker.
- the marker may include a marker (eg, engraved, convex or concave) that can be identified by its physical shape.
- the marker may include a marker that can be identified by a visual feature (for example, color or the like) (for example, the marker may include a marker that can be identified by the light emitted by the marker itself (for example, LED (Light Emitting Diode) or the like). ) May be included.
- the index measuring device 182b may include an imaging device (for example, a camera) capable of imaging the marker, or the index measuring device 182b may include the measurement light with respect to the marker. (Or, an irradiation device that irradiates (or an arbitrary measurement beam)) and a light receiving device that receives the measurement light from the marker may be included.
- An example of the index member 181b is a transmitter capable of transmitting a signal.
- the signal at least one of a radio wave signal and an optical signal can be mentioned.
- the index measuring device 182b may include a receiving device capable of receiving the signal.
- the position measuring device 18b may include a single index member 181b.
- the control device 2 is a light irradiation device in each of the X-axis direction, the Y-axis direction, and the Z-axis direction based on the measurement result of the index measurement device 182b (that is, information on the position of a single index member 181b).
- the position of 11 can be specified.
- the position measuring device 18b may include two index members 181b.
- the control device 2 is a light irradiation device 11 in each of the X-axis direction, the Y-axis direction, and the Z-axis direction based on the measurement result of the index measurement device 182b (that is, information regarding the positions of the two index members 181b).
- the position measuring device 18b may include three or more index members 181b.
- the control device 2 irradiates light in each of the X-axis direction, the Y-axis direction, and the Z-axis direction based on the measurement result of the index measurement device 182b (that is, information on the positions of three or more index members 181b).
- the position of the light irradiation device 11 in each rotation direction in the ⁇ X direction, the ⁇ Y direction, and the ⁇ Z direction (that is, the position of the light irradiation device 11 around the X axis, the Y axis, and the Z axis, respectively).
- the amount of rotation can be specified.
- a reflective member that reflects the measurement light from the (index) measuring device 182b may be provided.
- the reflective member may be a corner cube reflector or a cat's eye reflector.
- the position measuring device 18b may measure the position of the feature point on the coating film SF (on the workpiece S) in the reference coordinate system.
- the position measuring device 18b allows the position measuring device 18b to match the arbitrary position of the workpiece S (painted film SF) with the index member 181b. The positional relationship with can be obtained.
- the characteristic point of a certain processing object S is a characteristic of the three-dimensional shape of the object indicated by the point cloud data which is a set of points indicating the position on the surface (coating film SF) of the processing object S. It may include a point of position.
- the feature points the apex, the corner, the boundary, the point located on the most + Z side, the point located on the most -Z side, the point located on the most + X side, and the point located on the most -X side in the workpiece S.
- At least one of the points located on the most + Y side and the point located on the most ⁇ Y side may be mentioned.
- a plurality of position measuring devices 18b may be provided.
- the measurement axes of the respective position measuring devices 18b may intersect each other.
- the position measuring device 18b may measure the position of the light irradiation device 11 by a non-contact method (for example, at least one of a light detection method, a sound wave detection method, a radio wave detection method, etc.).
- a non-contact method for example, at least one of a light detection method, a sound wave detection method, a radio wave detection method, etc.
- Such a processing system SYSb of the second embodiment can enjoy the same effect as the effect that can be enjoyed by the processing system SYSa of the first embodiment described above.
- FIG. 22 is a cross-sectional view schematically showing the overall structure of the processing system SYSc of the third embodiment.
- the processing system SYSc of the third embodiment is different from the processing system SYSa of the first embodiment in that it includes a processing device 1c instead of the processing device 1.
- Other features of the machining system SYSc may be the same as the other features of the machining system SYS.
- the processing device 1c is different from the processing device 1 in that it further includes the position measuring device 18b described in the second embodiment in addition to the position measuring device 18.
- Other features of the processing device 1c may be the same as other features of the processing device 1.
- the control device 2 may control the drive system 12 (that is, the first drive system 121 and the second drive system 122) based on the measurement results of at least one of the position measurement devices 18 and 18b.
- the processing system SYSb of the third embodiment can enjoy the same effects as the effects that can be enjoyed by each of the processing system SYSa of the first embodiment and the processing system SYSb of the second embodiment described above.
- the measurement reference position and the position measuring device 18b of the position measuring device 18 are performed in the process of performing the machining operation.
- the relative position of the measurement reference position may change. Specifically, there is a possibility that the relative position between the measurement reference position of the position measuring device 18 and the measurement reference position of the position measuring device 18b deviates from the original ideal relative position. As a result, the position is measured so as to form the same structure as the structure formed on the coating film SF when the drive system 12 is controlled based on the measurement result of the position measuring device 18 so as to form a certain structure.
- the control device 2 has a relative position between the measurement reference position of the position measuring device 18 and the measurement reference position of the position measuring device 18b.
- the drive system 12 may be controlled based on the information regarding the above.
- the control device 2 first acquires information on the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b.
- the control device 2 performs, for example, a test process (specifically, a structure for testing).
- the processing apparatus 1c may be controlled so as to form an ST (hereinafter referred to as a “test structure”).
- the control device 2 forms a test structure ST by controlling the drive system 12 based on the measurement result of the position measurement device 18, and controls the drive system 12 based on the measurement result of the position measurement device 18b.
- the processing apparatus 1c may be controlled so as to form the same test structure ST.
- the control device 2 may control the processing device 1c so as to form the test structure ST on the actual coating film SF.
- the control device 2 is such that the test structure ST is formed on the coated film for test processing after the coating film for test processing is applied on the coating film SF by a coating device (not shown). May be controlled.
- the control device 2 may control the processing device 1c so as to form the test structure ST on a test object for forming the test structure ST (that is, an object different from the object to be processed SF). ..
- the coating film SF (or the coating film for the test or the object for the test) has a drive system based on the measurement result of the position measuring device 18.
- a test structure ST (hereinafter referred to as “test structure ST1”) formed when 12 is controlled, and a test structure formed when the drive system 12 is controlled based on the measurement result of the position measuring device 18b.
- An ST (hereinafter referred to as "test structure ST2”) is formed.
- FIG. 23A is a plan view showing a test structure ST1 formed when the drive system 12 is controlled based on the measurement result of the position measuring device 18.
- FIG. 23A is a plan view showing a test structure ST1 formed when the drive system 12 is controlled based on the measurement result of the position measuring device 18.
- test structure ST2 is a plan view showing a test structure ST2 formed when the drive system 12 is controlled based on the measurement result of the position measuring device 18b.
- the test structures ST1 and ST2 shown in FIGS. 23 (a) and 23 (b) are line-and-space structures extending in the one-dimensional direction, but the test structure is not limited thereto. For example, it may have a structure that extends in the two-dimensional direction (for example, one or more cross shapes or box shapes).
- the control device 2 measures the two test structures ST1 and ST2 formed by using at least one of the position measuring devices 18 and 18b (for example, an imaging device) or an imaging device (not shown). After that, the control device 2 acquires information regarding the formation positions of the test structures ST1 and ST2 based on the measurement results of at least one of the position measuring devices 18 and 18b.
- the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b has not changed (that is, the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b).
- the relative formation position of the test structure ST1 in the region where the test structure ST1 is formed and the region where the test structure ST2 is formed Should match the relative formation position of the test structure ST2 in.
- the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b has changed (that is, the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b).
- FIGS. 23 (a) and 23 (b) show examples in which the relative formation position of the test structure ST1 and the relative formation position of the test structure ST2 in the region where the test structure ST2 is formed do not match. Is shown. Therefore, the information regarding the formation positions of the test structures ST1 and ST2 substantially includes information regarding the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b.
- the control device 2 is affected by the change in the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b based on the information regarding the formation positions of the test structures ST1 and ST2.
- the drive system 12 can be controlled so as to be reduced.
- the control device 2 is at least one of the position measuring devices 18 and 18b so that the influence caused by the change in the relative position between the measurement reference position of the position measuring device 18 and the measurement reference position of the position measuring device 18b is reduced.
- the measurement result may be corrected, and the drive system 12 may be controlled based on the corrected measurement result.
- the control device 2 controls the drive system 12 based on the measurement results of at least one of the position measuring devices 18 and 18b
- the control device 2 has a measurement reference position of the position measuring device 18 and a measurement reference position of the position measuring device 18b.
- the movement mode (for example, at least one of the movement direction and the movement amount) of the light irradiation device 11 by the drive system 12 may be controlled so that the influence caused by the change in the relative position is reduced.
- the control device 2 controls the irradiation position of one or more processing light ELs on the coating film SF (processed object S) based on the measurement result of at least one of the position measuring devices 18 and 18b, and positions the position.
- the irradiation position of the processing light EL may be at least one of the position in the surface of the coating film SF (processed object S) and the position in the direction intersecting the surface.
- the processing data used by the light irradiation device 11 (data including the movement path of the irradiation position of the processing light EL, the intensity of the processing light EL, etc.) is obtained by using the measurement results of at least one of the position measuring devices 18 and 18b. It may be corrected.
- the control device 2 is Instead of actually forming the test structure ST, the processing apparatus 1c so as to irradiate the sensitive member PE whose characteristics are changed by the irradiation of the processing light EL with the processing light EL for forming the test structure ST. May be controlled. Specifically, the control device 2 irradiates the sensitive member PE with the processing light EL while controlling the drive system 12 as in the case of forming the test structure ST based on the measurement result of the position measuring device 18.
- the processing device 1c is controlled so as to irradiate the sensitive member PE with the processing light EL while controlling the drive system 12 as in the case of forming the same test structure ST. May be good.
- the control device 2 is processed into the attached sensitive member PE after the sensitive member PE (for example, a sheet-shaped sensitive member PE) is attached on the coating film SF by an attaching device (not shown).
- the processing apparatus 1c may be controlled so as to irradiate the light EL.
- the sensitive member PE does not need to be attached to the coating film SF as long as the positional relationship with the coating film SF does not change between the irradiation of the processing light EL and the measurement of the test structure ST.
- the sensitive member PE may be placed on the coating film SF.
- the sensitive member PE is formed with a characteristic change pattern PV whose characteristics are changed by irradiation with the processing light EL.
- FIG. 24A shows a characteristic change formed when the processing light EL is irradiated while controlling the drive system 12 as in the case of forming the test structure ST based on the measurement result of the position measuring device 18.
- FIG. 24B shows a characteristic change pattern PV formed when the processing light EL is irradiated while controlling the drive system 12 as in the case of forming the test structure ST based on the measurement result of the position measuring device 18b. (Hereinafter referred to as “characteristic change pattern PV2”).
- the control device 2 measures the two characteristic change patterns PV1 and PV2 formed by using at least one of the position measuring devices 18 and 18b (for example, an imaging device) or an imaging device (not shown). After that, the control device 2 acquires information regarding the formation positions of the characteristic change patterns PV1 and PV2 based on the measurement results of at least one of the position measuring devices 18 and 18b.
- the relative position between the measurement reference position of the position measuring device 18 and the measurement reference position of the position measuring device 18b has not changed, the relative position of the characteristic change pattern PV1 within the region where the characteristic change pattern PV1 is formed is relative.
- the formation position should coincide with the relative formation position of the characteristic change pattern PV2 within the region where the characteristic change pattern PV2 is formed.
- the relative position of the characteristic change pattern PV1 within the region where the characteristic change pattern PV1 is formed is relative.
- the formation position and the relative formation position of the characteristic change pattern PV2 in the region where the characteristic change pattern PV2 is formed do not match.
- the relative formation position of the characteristic change pattern PV1 and the relative formation position of the test structure ST2 in the region where the characteristic change pattern PV2 is formed coincide with each other. An example is shown. Therefore, the information regarding the formation positions of the characteristic change patterns PV1 and PV2 substantially includes information regarding the relative position between the measurement reference position of the position measuring device 18 and the measurement reference position of the position measuring device 18b.
- control device 2 is affected by the change in the relative position between the measurement reference position of the position measurement device 18 and the measurement reference position of the position measurement device 18b based on the information regarding the formation positions of the characteristic change patterns PV1 and PV2.
- the drive system 12 can be controlled so that
- a plurality of position measuring devices 18 and a plurality of position measuring devices 18b may be provided.
- the measurement axes of the respective position measuring devices 18 may be in a relationship of intersecting (or twisting) with each other, or may be parallel (or coaxial) with each other. Then, the measurement axes of the respective position measuring devices 18b may be in a relationship of intersecting each other.
- FIG. 25 is a perspective view schematically showing the structure of the processing system SYSd of the fourth embodiment.
- the machining system SYSd of the fourth embodiment is different from the machining system SYSa of the first embodiment in that it includes a machining device 1d instead of the machining device 1.
- Other features of the machining system SYSd may be the same as the other features of the machining system SYS.
- the processing device 1d is different from the processing device 1 in that the support device 14d is provided instead of the support device 14.
- Other features of the processing device 1d may be the same as other features of the processing device 1.
- some of the constituent requirements of the processing system SYSd for example, the accommodating device 13, the drive system 15, the exhaust device 16, the gas supply device 17, and the control device 2. The description of is omitted.
- the support device 14d supports the accommodating device 13 in the same manner as the support device 14. That is, the support device 14d supports the drive system 12 and the light irradiation device 11 via the accommodating device 13 in the same manner as the support device 14.
- the support device 14d is different from the support device 14 capable of self-propelling while being supported by the work object SF in that it can run on its own without being supported by the work object SF.
- the support device 14d differs from the support device 14 capable of self-propelling in contact with the work target SF in that it can run on its own without contacting (that is, interfering with) the work object SF. ..
- Other features of the support device 14d may be the same as the other features of the support device 14.
- the support device 14d includes a gantry member 141d and a moving block 142d instead of the beam member 141 and the leg member 142 included in the support device 14.
- the gantry member 141d is a gate-shaped member in which a beam member 1412d having a linear shape is arranged on top of a plurality of leg members 1411d having a linear shape.
- the plurality of leg members 1411d are linear members extending in the Z-axis direction
- the beam member 1412d is a linear member extending in the X-axis direction.
- the gantry member 141d has a size large enough to surround the work target SF at least partially without coming into contact with the work target S.
- the gantry member 141d may have a size large enough so that the plurality of leg members 1411d can sandwich the object S to be processed between them.
- the gantry member 141d may have a size large enough to allow the beam member 1412d to be located above the workpiece S.
- the gantry member 141d has a size large enough to straddle the body of an aircraft, which is a specific example of the object S to be processed.
- the gantry member 141d can self-propell along a rail (not shown) formed on a support surface (or other surface) on which the object to be processed S is arranged.
- the gantry member 141d can, for example, self-propell along a rail (not shown) extending in the Y-axis direction. That is, in the example shown in FIG. 25, the gantry member 141d can self-propell along the Y-axis direction.
- the moving block 142d is attached to the beam member 1412d of the gantry member 141d.
- the moving block 142d is attached to the beam member 1412d so as to be movable along the beam member 1412d.
- the moving block 142d may be attached to the rail so as to be movable along a rail (not shown) formed on the beam member 1412d.
- the moving block 142d can move along the X-axis direction.
- the moving block 142d can further move along a direction in which the gantry member 141d self-propells and a beam member 1412d extends.
- the moving block 142d can move along the Y-axis direction in which the gantry member 141d self-propells and the Z-axis direction in which the beam member 1412d extends in the X-axis direction.
- a drive system 12 and a light irradiation device 11 are attached to the moving block 142d via an accommodation device 13 (not shown). That is, the moving block 142d supports the drive system 12 and the light irradiation device 11 via an accommodation device 13 (not shown). Therefore, the light irradiation device 11 also moves due to the movement of the gantry member 141d and the moving block 142d. Specifically, the light irradiation device 11 moves along the Y-axis direction due to the movement of the gantry member 141d along the Y-axis direction. Due to the movement of the moving block 142d along the X-axis direction and the Z-axis direction, the light irradiation device 11 moves along the X-axis direction and the Z-axis direction.
- the gantry member 141d may be provided with a fixing member for fixing the gantry member 141d to the support surface in order to reduce the positional deviation of the light irradiation device 11 at the time of processing the object S to be processed.
- Such a processing system SYSd of the fourth embodiment can enjoy the same effect as the effect that can be enjoyed by the processing system SYSa of the first embodiment described above.
- the gantry member 141d may be capable of self-propelling along each of a plurality of different directions.
- the moving block 142d may be attached to at least one leg member 1411d in addition to or in place of the beam member 1412d.
- the moving block 142d may be attached to at least one leg member 1411d so that it can move along at least one leg member 1411d.
- the moving block 142d may, in addition to or instead of, moving along the beam member 1412d move along at least one leg member 1411d.
- the moving block 142d may be movable along a single direction. The moving block 142d does not have to be movable.
- the processing system SYSd of the fourth embodiment may further include configuration requirements specific to at least one of the processing system SYSb of the second embodiment described above to the processing system SYSd of the third embodiment.
- the constituent requirements specific to the processing system SYSb of the second embodiment include the constituent requirements related to the position measuring device 18b.
- the configuration requirements specific to the processing system SYSc of the third embodiment include the configuration requirements for the position measuring devices 18 and 18b.
- FIG. 26 is a perspective view schematically showing the structure of the processing system SYSTEM of the fifth embodiment.
- FIG. 27 is a front view schematically showing the structure of the processing system SYSTEM of the fifth embodiment.
- FIG. 28 is a side view schematically showing the structure of the processing system SYSTEM of the fifth embodiment.
- FIG. 29 is an enlarged front view showing a part of the structure of the processing system SYSTEM of the fifth embodiment.
- the processing system SYSTEM of the fifth embodiment is provided with the processing device 1e instead of the processing device 1 as compared with the processing system SYSd of the fourth embodiment. different.
- Other features of the machining system SYS may be the same as other features of the machining system SYSd.
- the processing device 1e is different from the processing device 1d in that the support device 14e is provided instead of the support device 14d.
- Other features of the processing device 1e may be the same as other features of the processing device 1d.
- some of the constituent requirements of the processing system SYSTEM for example, the accommodating device 13, the drive system 15, the exhaust device 16, the gas supply device 17 and the control). The description of the device 2) is omitted.
- the support device 14e supports the accommodating device 13 in the same manner as the support device 14d. That is, the support device 14e supports the drive system 12 and the light irradiation device 11 via the accommodating device 13 in the same manner as the support device 14d. Like the support device 14d, the support device 14e can self-propell without being supported by the work target SF.
- the support device 14e differs from the support device 14d in that it includes an arch member 141e and a moving block 142e instead of the gantry member 141d and the moving block 142d. Other features of the support device 14e may be the same as other features of the support device 14d.
- the arch member 141e is an arch-shaped member in which a beam member 1412e having a curved shape (for example, having an arch shape) is arranged on an upper portion of a plurality of leg members 1411e having a linear shape.
- the plurality of leg members 1411e are linear members extending in the Z-axis direction, and the beam member 14e extends along the X-axis direction and depends on the position in the X-axis direction. It is a curved member whose position (that is, height) in the Z-axis direction changes.
- the arch member 141e has a size large enough to surround the work target SF at least partially without coming into contact with the work target S.
- the arch member 141e may have a size large enough so that the plurality of leg members 1411e can sandwich the object S to be processed between them.
- the arch member 141e may have a size large enough to allow the beam member 1412e to be located above the workpiece S.
- the arch member 141e has a size large enough to straddle the airframe of an aircraft, which is a specific example of the object S to be processed.
- the arch member 141e can self-propell along a rail (not shown) formed on a support surface (or other surface) on which the object to be processed S is arranged. ..
- the arch member 141e can, for example, self-propell along a rail (not shown) extending in the Y-axis direction. That is, in the example shown in FIG. 26, the arch member 141e can self-propell along the Y-axis direction.
- the arch member 141e may be self-propelled along each of a plurality of different directions.
- the moving block 142e is attached to the arch member 141e.
- the moving block 142e may be attached to the beam member 1412e of the arch member 141e.
- the moving block 142e may be attached to at least one leg member 1411e of the arch member 141e.
- the moving block 142e is attached to the arch member 141e so as to be movable along the arch member 141e.
- the moving block 142e may be attached to the rail 143e so as to be movable along the rail 143e (see FIG. 29) formed on the arch member 141e.
- the rail 143e is formed on the beam member 1412e of the arch member 141e.
- the rail 143e may be formed on at least one leg member 1411e of the arch member 141e.
- the beam member 1412d is a curved member that extends along the X-axis direction and whose position (that is, height) in the Z-axis direction changes according to the position in the X-axis direction. Therefore, the moving block 142e can move along the X-axis direction and the Z-axis direction.
- a drive system 12 and a light irradiation device 11 are attached to the moving block 142e via an accommodation device 13 (not shown). That is, the moving block 142e supports the drive system 12 and the light irradiation device 11 via an accommodation device 13 (not shown). Therefore, the light irradiation device 11 also moves due to the movement of the arch member 141e and the moving block 14e. Specifically, the light irradiation device 11 moves along the Y-axis direction due to the movement of the arch member 141e along the Y-axis direction. Due to the movement of the moving block 142e along the X-axis direction and the Z-axis direction, the light irradiation device 11 moves along the X-axis direction and the Z-axis direction. In the example shown in FIGS. 26 to 29, the drive system 12 does not include the first drive system 121, but the drive system 12 may include the first drive system 121.
- Such a processing system SYSTEM of the fifth embodiment can enjoy the same effect as the effect that can be enjoyed by the processing system SYSd of the fourth embodiment described above.
- the processing system SYSTEM of the fifth embodiment has the configuration requirements specific to at least one of the processing system SYSb of the second embodiment to the processing system SYSc of the third embodiment described above. May be further provided.
- the processing system SYSf of the sixth embodiment (hereinafter, the machining system SYS of the sixth embodiment will be referred to as "machining system SYSf") will be described.
- the machining system SYSf of the sixth embodiment is different from the machining system SYSa of the first embodiment in that it includes a machining device 1f instead of the machining device 1.
- Other features of the machining system SYSf may be the same as the other features of the machining system SYS.
- the processing device 1f is different from the processing device 1 in that the drive system 12f is provided instead of the drive system 12.
- Other features of the processing device 1f may be the same as other features of the processing device 1. Therefore, in the following, the drive system 12f of the sixth embodiment will be described with reference to FIGS. 30 and 31. 30 and 31 are cross-sectional views showing the structure of the drive system 12f according to the sixth embodiment.
- the drive system 12f is different from the drive system 12 in that it includes a plurality of second drive systems 122.
- FIG. 30 shows an example in which the drive system 12f includes two second drive systems 122, but the drive system 12f may include three or more second drive systems 122. Other features of the drive system 12f may be the same as other features of the drive system 12.
- FIG. 30 shows an example in which the second drive system 122 is attached to the tip arm member 12124 of the first drive system 121 via the attachment member 1213. However, as described above, the second drive system 122 may be directly attached to the tip arm member 12124.
- the direction of the elastic force applied by the air spring 1223 of the second drive system 122 of one of the plurality of second drive systems 122 is the other of the plurality of second drive systems 122. It may be arranged so as to be different from the direction of the elastic force applied by the air spring 1223 of the second drive system 122.
- the air spring 1223 # 1 of the second drive system 122 # 1 is arranged so as to apply an elastic force along the X-axis direction
- the second drive system 122 # 2 is provided.
- the air spring 1223 # 2 of the above is arranged so as to apply an elastic force along the Z-axis direction.
- the air spring 1223 of at least one of the plurality of second drive systems 122 may be arranged so as to apply an elastic force along a direction including a gravitational direction component.
- the air spring 1223 # 2 of the second drive system 122 # 2 is arranged so as to apply an elastic force along the Z-axis direction, which is a direction including the gravity direction component. ..
- FIGS. 32 and 33 the posture of the light irradiation device 11 changes in the coordinate system composed of the X-axis, the Y-axis, and the Z-axis depending on the movement mode of the light irradiation device 11 by the drive system 12. (That is, at least one of the amount of rotation around the X-axis, the amount of rotation around the Y-axis, and the amount of rotation around the Z-axis) may change.
- FIG. 32 is a front view showing a light irradiation device 11 whose posture is changed so as to irradiate the processing light EL from diagonally downward to diagonally upward of the aircraft which is the processing object S
- FIG. 33 is a front view.
- one second drive system 122 connects the light irradiation device 11 and the first drive system 121, and the other second drive system 122 is the light irradiation device 11 and the first. It may be arranged so as to be different from the direction in which the drive system 121 is connected. Further, the air spring 1223 of each second drive system 122 may apply an elastic force along the direction in which each second drive system 122 connects the light irradiation device 11 and the first drive system 121.
- the direction of the elastic force applied by the air spring 1223 of one second drive system 122 is the elasticity applied by the air spring 1223 of the other second drive system 122. It will be different from the direction of force.
- the second drive system 122 # 1 is driven by the light irradiation device 11 (particularly, the housing 114) and the first drive.
- An elastic force is applied along the direction of connecting the system 121 (particularly, the mounting member 1213) (for example, the direction A1 from the lower left to the upper right in FIG.
- the direction of the elastic force applied by the damper member 1224 of the second drive system 122 of one of the plurality of second drive systems 122 is the other of the plurality of second drive systems 122. It may be arranged so as to be different from the direction of the elastic force applied to the damper member 1224 of the second drive system 122.
- the damper member 1224 # 1 of the second drive system 122 # 1 is arranged so as to apply an elastic force along the X-axis direction
- the second drive system 122 # 2 is provided.
- the damper member 1224 # 2 of the above is arranged so as to apply an elastic force along the Z-axis direction.
- At least one damper member 1224 of the plurality of second drive systems 122 may be arranged so as to apply an elastic force along a direction including a gravity direction component.
- the damper member 1224 # 2 of the second drive system 122 # 2 is arranged so as to apply an elastic force along the Z-axis direction which is the direction including the gravity direction component. ..
- the damper member is included in the coordinate system composed of the X-axis, the Y-axis, and the Z-axis for the same reason as when the direction of the elastic force applied by the air spring 1223 changes.
- the direction of the elastic force applied by 1224 may change.
- the direction of the elastic force applied by the damper member 1224 of one second drive system 122 is the other second. 2
- the damper member 1224 of the drive system 122 may be arranged so as to be different from the direction of the elastic force applied.
- one second drive system 122 connects the light irradiation device 11 and the first drive system 121, and another second drive system 122 connects the light irradiation device 11 and the first drive system 121.
- the damper member 1224 of each second drive system 122 may apply an elastic force along the direction in which each second drive system 122 connects the light irradiation device 11 and the first drive system 121.
- the direction of the elastic force applied by the damper member 1224 of one second drive system 122 is the elasticity applied by the damper member 1224 of the other second drive system 122. It will be different from the direction of force. For example, in the examples shown in FIGS.
- the damper member 1224 # 1 of the second drive system 122 # 1 has a direction in which the second drive system 122 # 1 connects the light irradiation device 11 and the first drive system 121.
- the elastic force is applied along the direction A1 from the lower left to the upper right in FIG. 33
- the damper member 1224 # 2 of the second drive system 122 # 2 is the light irradiation device 11 of the second drive system 122 # 2.
- An elastic force is applied along the direction in which the light is connected to the first drive system 121 (for example, the direction A2 from the upper left to the lower right in FIG. 33).
- the direction of the driving force applied by the drive member 1225 of the second drive system 122 of one of the plurality of second drive systems 122 is the other of the plurality of second drive systems 122. It may be arranged so as to be different from the direction of the driving force applied by the driving member 1225 of the second driving system 122.
- the drive member 1225 # 1 of the second drive system 122 # 1 is along a direction intersecting the X axis (for example, at least one in the Y axis direction and the Z axis direction).
- the driving member 1225 # 2 of the second driving system 122 # 2 is arranged so as to apply the driving force, along a direction intersecting the Z axis (for example, at least one in the X-axis direction and the Y-axis direction). It is arranged to give driving force.
- at least one driving member 1225 of the plurality of second driving systems 122 may be arranged so as to apply a driving force along a direction including a directional component intersecting the gravity direction.
- the drive member 1225 # 2 of the second drive system 122 # 2 is along at least one of the X-axis direction and the Y-axis direction, which is a direction including a directional component intersecting the gravity direction. It is arranged to give elastic force.
- the driving member is in the coordinate system composed of the X-axis, the Y-axis, and the Z-axis.
- the direction of the driving force applied by the 1225 may change.
- the plurality of second drive systems 122 have different directions of driving force applied by the drive member 1225 of one second drive system 122 even when the posture of the light irradiation device 11 changes. It may be arranged so as to be different from the direction of the driving force applied by the driving member 1225 of the second driving system 122.
- one second drive system 122 connects the light irradiation device 11 and the first drive system 121
- another second drive system 122 connects the light irradiation device 11 and the first drive system 121. May be different.
- the drive member 1225 of each second drive system 122 applies a driving force along the direction in which each second drive system 122 intersects the direction of connecting the light irradiation device 11 and the first drive system 121. Good.
- the direction of the driving force applied by the driving member 1225 of one second driving system 122 is given by the driving member 1225 of the other second driving system 122. It will be different from the direction of the driving force.
- the drive member 1225 # 1 of the second drive system 122 # 1 has a direction in which the second drive system 122 # 1 connects the light irradiation device 11 and the first drive system 121.
- a driving force is applied along the direction intersecting with (for example, the direction A2 from the upper left to the lower right in FIG. 33), and the driving member 1225 # 2 of the second driving system 122 # 2 is the second driving system 122 # 2.
- Is applying a driving force along a direction intersecting in a direction connecting the light irradiation device 11 and the first driving system 121 for example, the direction A1 from the lower left to the upper right in FIG. 33).
- the number of air springs 1223, the number of damper members 1224, and the number of drive members 1225 do not have to be equal to each other.
- the number of air springs 1223 may be less than the number of drive members 1225.
- Such a processing system SYSf of the sixth embodiment can enjoy the same effect as the effect that can be enjoyed by the processing system SYSa of the first embodiment described above.
- the processing system SYSf includes a plurality of second drive systems 122, the posture of the light irradiation device 11 can be freely adjusted as compared with the processing system SYSa having a single second drive system 122. The degree is improved.
- the light irradiation device 11 not only irradiates the processing light EL from above to below the processing object S, but also from diagonally above to diagonally downward of the processing object S.
- the second posture of irradiating the processing light EL, the third posture of irradiating the processing light EL from the side to the side of the processing object S, and the processing light EL from diagonally below to diagonally above the processing object S It is possible to move so as to have a fourth posture for irradiating and a fifth posture for irradiating the processing light EL from below to above the processing object S. Therefore, the processing system SYSf can appropriately form a structure on the coating film SF of the processing object S having a complicated shape.
- connection points between the first drive system 121 and the light irradiation device 11 by the second drive system 122 are the first surface of the light irradiation device 11 and the first surface of the light irradiation device 11. May be located between the second surface facing away from the other side.
- the connection point CP between the first drive system 121 and the light irradiation device 11 by the second drive system 122 is the housing 114.
- a first surface for example, a surface 1141 of the housing 114 facing away from the object to be machined S
- a second surface of the housing 114 for example, a surface of the housing 114 facing the object S to be machined. It may be located between 1142).
- the connection point CP is arranged between the first surface and the second surface of the light irradiation device 11 (for example, between the surfaces 1141 and 1142 of the housing 114) in this way, the connection point CP Positioning of the light irradiation device 11 as compared to the case where the CP is not arranged between the first surface and the second surface of the light irradiation device 11 (for example, between the surfaces 1141 and 1142 of the housing 114). Accuracy is improved.
- connection point CP between the first drive system 121 and the light irradiation device 11 by the second drive system 122 may be located at the center of gravity GP (see FIG. 30) of the light irradiation device 11.
- the connection point CP is located at the center of gravity position GP, the positioning accuracy of the light irradiation device 11 is improved as compared with the case where the connection point CP is not located at the center of gravity position GP.
- the connection point CP is between the first surface and the second surface of the light irradiation device 11 (for example, It may be arranged on the surface 1141 and the surface 1142 of the housing 114). In at least one of the first to fifth embodiments, the connection point CP may be arranged at the center of gravity position GP.
- the processing system SYSf of the sixth embodiment may further include configuration requirements specific to at least one of the processing system SYSb of the second embodiment described above to the processing system SYSTEM of the fifth embodiment.
- the configuration requirements specific to the processing system SYSd of the fourth embodiment include the configuration requirements for the support device 14d.
- the configuration requirements specific to the processing system SYSTEM of the fifth embodiment include the configuration requirements for the support device 14e.
- FIG. 34 is a cross-sectional view schematically showing the structure of the processing system SYSg of the seventh embodiment.
- the machining system SYSg of the seventh embodiment is different from the machining system SYSa of the first embodiment in that it includes a machining device 1g instead of the machining device 1.
- Other features of the machining system SYSg may be the same as other features of the machining system SYS.
- the processing device 1g is different from the processing device 1 in that the support device 14g is provided instead of the support device 14.
- Other features of the processing device 1g may be the same as other features of the processing device 1.
- FIG. 34 in order to emphasize the legibility of the drawings, some of the constituent requirements of the processing system SYSg (for example, the accommodating device 13, the drive system 15, the exhaust device 16, the gas supply device 17, and the control device 2). The description of is omitted.
- the support device 14g supports the accommodating device 13 in the same manner as the support device 14. That is, the support device 14g supports the drive system 12 and the light irradiation device 11 via the accommodating device 13 in the same manner as the support device 14.
- the support device 14g differs from the support device 14 which does not have to be able to fly in that it can fly at a position away from the object to be processed SF.
- An example of a flightable support device (14 g) is an aircraft or the like.
- the air vehicle may be remotely controllable, may be maneuverable by the operator on board the air vehicle, or may be autonomously flyable. Examples of air vehicles include at least one of aircraft, drones (see FIG. 34), helicopters, balloons and airships.
- Such a processing system SYSg of the seventh embodiment can enjoy the same effect as the effect that can be enjoyed by the processing system SYSa of the first embodiment described above.
- the machining system SYSg of the seventh embodiment may further include configuration requirements specific to at least one of the machining system SYSb of the second embodiment and the machining system SYSf of the sixth embodiment described above.
- the constituent requirements specific to the processing system SYSf of the sixth embodiment include the constituent requirements related to the drive system 12f.
- the drive system 12 includes a first drive system 121 and a second drive system 122.
- the drive system 12 does not have to include the first drive system 121.
- the second drive system 122 may be attached to the accommodating device 13 without going through the first drive system 121.
- the second drive system 122 may be attached to the support device 14 (or the support device 14d, 14e or 14g) without going through the first drive system 121.
- the processing system SYS deflects the processing light EL with the galvano mirror 1122 in order to cause a plurality of processing light ELs to scan the surface of the coating film SF.
- the processing device 1 causes the light irradiation device 11 to move relative to the coating film SF to form a plurality of processing light ELs.
- the surface of the coating film SF may be scanned. That is, the control device 2 may control the drive system 12 to move the light irradiation device 11 relative to the coating film SF so that the processing light EL scans the surface of the coating film SF.
- One of the purposes for the drive system 12 to move the light irradiation device 11 relative to the coating film SF is to cause the processing light EL to scan the surface of the coating film SF as described above. Therefore, if the coating film SF can be scanned by the processing light EL even if the light irradiation device 11 does not move, the light irradiation device 11 does not have to move. That is, the processing system SYS does not have to include the drive system 12.
- One of the purposes for the drive system 12 to move the light irradiation device 11 relative to the coating film SF is that when a plurality of processing shot areas SA are accommodated in the accommodation space SP of the accommodation device 13, the accommodation device 13 is accommodated. This is because the plurality of processing shot regions SA are sequentially scanned by the processing light EL without moving the support device 14. Therefore, when a single processed shot region SA is accommodated in the accommodation space SP, the light irradiation device 11 does not have to move. That is, the processing device 1 does not have to include the drive system 12.
- the processing device 1 includes an accommodating device 13, a support device 14, a drive system 15, an exhaust device 16, and a gas supply device 17.
- the processing device 1 does not have to include at least one of the accommodating device 13, the support device 14, the drive system 15, the exhaust device 16, and the gas supply device 17 as long as the processing object S can be processed. ..
- the processing device 1 does not have to include at least a part of the accommodating device 13, the support device 14, the drive system 15, the exhaust device 16, and the gas supply device 17 as long as the processing object S can be processed.
- the drive system 12 may be attached to the support device 14.
- the structures of the accommodating device 13, the support device 14, the drive system 15, the exhaust device 16, and the gas supply device 17 described above are merely examples, and the processing device 1 has a structure different from that described above. At least one of 13, a support device 14, a drive system 15, an exhaust device 16, and a gas supply device 17 may be provided.
- the processing system SYS forms a riblet structure by the coating film SF on the surface of the processing object S.
- the processing system SYS may form an arbitrary structure by the coating film SF having an arbitrary shape on the surface of the object to be processed S.
- the control device 2 controls the light irradiation device 11 or the like so that the processing light EL scans the surface of the coating film SF along the scanning locus according to the structure to be formed, an arbitrary shape can be obtained.
- Any structure having the above can be formed.
- An example of an arbitrary structure is a micro-nanometer-order fine texture structure (typically an uneven structure) formed regularly or irregularly.
- Such a fine texture structure may include at least one of a shark skin structure and a dimple structure having a function of reducing resistance due to a fluid (gas and / or liquid).
- the fine texture structure may include a leaf surface structure of a sacred lotus having at least one of a liquid repellent function and a self-cleaning function (for example, having a lotus effect).
- the fine texture structure includes a fine protrusion structure having a liquid transport function (see US Patent Publication No. 2017/0044002), an uneven structure having a liquid-forming function, an uneven structure having an antifouling function, a reflectance reducing function, and a repellent property.
- a moth-eye structure that has at least one of the liquid functions, a concave-convex structure that intensifies only light of a specific wavelength by interference to exhibit a structural color, a pillar array structure that has an adhesive function using van der Waals force, a concave-convex structure that has an aerodynamic noise reduction function
- at least one of a honeycomb structure having a droplet collecting function and the like may be included.
- the processing system SYS removes the coating film SF by evaporating the coating film SF by irradiation with the processing light EL.
- the processing system SYS may remove the coating film SF by melting the coating film SF by irradiation with the processing light EL and removing the melted coating film SF.
- the processing system SYS may make the coating film SF brittle by irradiation with the processing light EL, and remove the coating film SF by peeling off the brittle coating film SF.
- the processing system SYS ablates the coating film SF formed on the surface of the processing object S.
- the processing system SYS may remove a part of the coating film SF formed on the surface of the object to be processed S by thermal processing.
- the processing system SYS forms a concave portion C (or an arbitrary structure such as a concave structure CP1 or a riblet structure formed by the concave structure CP1) by removing the coating film SF. That is, the processing system SYS processes the coating film SF so as to partially thin the coating film SF. However, the processing system SYS may process the coating film SF so as to partially thicken the coating film SF in addition to or instead of partially thinning the coating film SF. That is, in the processing system SYS, in addition to or instead of forming the concave portion C by removing the coating film SF, the convex portion (or the convex structure CP2 or the convex shape) is added by adding the coating film SF.
- the convex portion or the convex structure CP2 or the convex shape
- any structure according to the structure CP2) may be formed.
- the processing system SYS removes the coating film SF of the first portion by irradiating the first portion of the coating film SF with the processing light EL, and then applies the removed coating film SF to the second portion of the coating film SF.
- the coating film SF in the second portion may be made relatively thick (that is, a convex portion may be formed in the second portion).
- the processing system SYS processes the coating film SF formed on the surface of the object to be processed S.
- the processing system SYS may process any film other than the coating film SF formed on the surface of the object to be processed S.
- the processing system SYS may process a structure in which a plurality of layers are laminated.
- the processing system SYS may process at least one layer (typically, at least one layer including the most surface-side layer) among the plurality of layers constituting the structure.
- the processing system SYS may process at least one layer out of a plurality of layers constituting the structure to form a structure composed of the layers.
- At least one layer to be processed corresponds to the coating film SF described above, and layers other than the at least one layer correspond to the object to be processed S.
- the processing system SYS may process the processing object S itself. That is, the processing system SYS may process the coating film SF or the processing object S on which no arbitrary film is formed on the surface.
- the machining system SYS forms a riblet structure on the machining object S to reduce the resistance of the surface of the machining object S to the fluid.
- the machining system SYS may form other structures on the machining object S that are different from the riblet structure for reducing the resistance of the surface to the fluid.
- the processing system SYS may form a riblet structure on the processing object S to reduce noise generated when the fluid and the surface of the processing object S move relatively.
- the processing system SYS may form a structure in the processing object S that generates a vortex with respect to the flow of fluid on the surface of the processing object S.
- the processing system SYS may form a structure on the processing object S to impart hydrophobicity to the surface of the processing object S.
- the processing system SYS that processes an object with the processing optical EL is described. That is, in the above description, an example in which the second drive system 122 connects the irradiation device 11 and the first drive system 121 is described. However, in addition to or in place of the light irradiation device 11 in the processing system SYS, an end effector acting on an object may be used.
- the second drive system 122 may connect the end effector and the first drive system 121.
- the end effector may be a part having a function of directly acting on a work target (for example, an object). Further, the end effector may be a part for obtaining the property of the work target (for example, an object).
- the properties of the object are the shape of the object, the position of the object, the position of the feature point of the object, the posture of the object, and the surface texture of the object (for example, reflectance, spectral reflectance, surface roughness). And at least one such as color), and at least one such as the hardness of the object may be included.
- the light irradiation device 11 and the position measurement device 18 in the above description can be regarded as a kind of end effector.
- the first drive system 121 as a movable member whose relative positional relationship between the end effector and a part of the object can be changed, the first drive system 121, and the end effector.
- a first device including a second drive system 122 as a connecting device for connecting the first drive system 121 and the end effector can be mentioned so that the relative positional relationship with the robot can be changed.
- the first device may be referred to as a robot system.
- a second device including the end effector and the second drive system 122 may be configured.
- the second device may be referred to as an end effector device.
- the device may be composed of a second drive system 122 as a connection device for connecting the first drive system 121 and the end effector.
- the end effector Efa which is an example of the end effector, is shown in FIG. As shown in FIG. 35, the end effector Efa is connected to the attached portion Ef1 attached to the connecting device (for example, the second drive system 122) and the shaft of the attached portion Ef1 (typically, the attached portion Ef1). It includes a plurality of finger modules mounted on a plurality of mounting surfaces (three mounting surfaces in the example shown in FIG. 35) inclined with respect to a shaft connecting the device). Each finger module is provided on the first link module Ef21 that can rotate around the first joint axis of the attached portion Ef1 and the first link module Ef21, and drives the first link module Ef21 to rotate around the first joint axis.
- the second drive module Ef32, which is rotationally driven around the third joint axis, the third link module Ef23 provided in the second link module Ef22 so as to be rotatable around the third joint axis, and the third link module Ef23 are rotationally driven around the third joint axis.
- the end effector Efa may be referred to as a hand.
- a part (typically, a tip portion) of the third link module Ef23 may be regarded as a grip portion for gripping an object, or may be referred to as a fingertip of a hand.
- the position measuring device 18 may be attached to the attached portion Ef1.
- the measurement axis of the position measuring device is a direction along the axis of the attached portion Ef1, a direction parallel to the axis of the attached portion Ef1, or a direction inclined with respect to the axis of the attached portion Ef1. May be good.
- the position measuring device 18 may measure at least one of at least a part of the object and a part of the end effector Efa (typically, a grip portion or a fingertip). Further, a part of the position measuring device 18b (typically, the index member 181b) may be attached to the attached portion Ef1.
- the end effector is not limited to the end effector Efa as a hand capable of gripping the object shown in FIG. 35 and the position measuring device.
- the end effector includes a suction holding device Efb that sucks and holds an object as shown in FIG. 36 (a), a spray type coating device Efc shown in FIG. 36 (b), and a roller type coating shown in FIG. 36 (c).
- At least one of the device Efd, the machining head device Efe provided with a cutting tool such as a drill shown in FIG. 36 (d), and the welding gun device Eff shown in FIG. 36 (e) may be included.
- the end effector may include at least one of an injector, a manipulator, and an air blow that injects molten metal, molten resin, particles for blasting, and the like.
- the connecting device may supply non-contact power to the end effector. Further, the output from the end effector may be output to the outside (typically, the control device 2) by a non-contact method such as wireless or optical transmission.
- the control device controls the active anti-vibration device so that the desired position of the object is irradiated with the processed light, and changes the relative position between the object and the irradiation device according to Appendix 1 or 2. Processing system.
- the control device controls the active vibration isolator so that the vibration amount of the irradiation device with respect to the object is smaller than that in the case where the active vibration isolator is not controlled, and the object and the irradiation device are controlled.
- the processing system according to any one of Appendix 1 to 3 for changing the relative position with.
- the irradiation device is attached to another member via the active vibration isolation device.
- the control device controls the active vibration isolator so that the vibration amount of the irradiation device with respect to the object is smaller than the vibration amount of the other member with respect to the object, and the object and the irradiation device.
- Appendix 6 The processing system according to any one of Appendix 1 to 5, further comprising a moving device for moving the active vibration isolator.
- Appendix 7 The processing system according to Appendix 6, wherein the moving device moves the irradiation device together with the active vibration isolator.
- Appendix 8 The processing system according to Appendix 6 or 7, wherein the active anti-vibration device is attached to the moving device.
- Appendix 13 The processing system according to any one of Appendix 6 to 12, wherein the moving device includes a flying device capable of flying at a position away from an object.
- Appendix 14 The processing system according to any one of Appendix 6 to 13, wherein the control device controls the moving device to change the relative position between the object and the irradiation device.
- Appendix 15 The processing system according to Appendix 14, wherein the control device controls the moving device to change the relative position between the object and the irradiation device so as to align the object with the irradiation region of the processing light. ..
- Appendix 16 The processing system according to Appendix 14 or 15, wherein the control device controls the moving device to change the relative position between the object and the irradiation device so that the processing light is irradiated to a desired position of the object. .. [Appendix 17] The amount of change in the relative position between the object and the irradiation device by the active vibration isolator is smaller than the amount of change in the relative position between the object and the irradiation device by the moving device. Any one of Appendix 14 to 16. The processing system described in the section.
- the control device controls at least one of the active vibration isolator and the moving device so that the vibration amount of the irradiation device with respect to the object is reduced based on the frequency of vibration of the irradiation device with respect to the object.
- the processing system according to Appendix 19.
- the control device controls the moving device so that the vibration amount of the irradiation device with respect to the object becomes small.
- the control device is an active vibration isolator so that when the frequency is included in a second frequency range higher than the first frequency range, the vibration amount of the irradiation device with respect to the object is reduced. 20.
- the machining system according to Appendix 20.
- the irradiation device is attached to another member via the active vibration isolation device.
- the active vibration isolator includes a position changing device that changes the relative position between the other member and the irradiation device, and a vibration damping device that attenuates vibration transmitted between the other member and the irradiation device.
- the processing system according to any one of Appendix 1 to 21.
- Appendix 23 The processing system according to Appendix 22, wherein the control device changes the relative position between the object and the irradiation device by changing the relative position between the other member and the irradiation device using the position changing device. ..
- the position changing device changes the relative position between the other member and the irradiation device by an electric force.
- Appendix 25 The processing system according to any one of Appendix 1 to 24, further comprising a position measuring device for measuring the relative position between the object and the irradiation device.
- Appendix 26 The processing system according to Appendix 25, wherein the control device controls the active vibration isolator based on the measurement result of the position measuring device.
- [Appendix 27] Equipped with a plurality of the position measuring devices
- the control device provides information on a relative position between the measurement reference position of the first position measurement device of the plurality of position measurement devices and the measurement reference position of the second position measurement device of the plurality of position measurement devices. 25 or 26, wherein the active vibration isolator is controlled based on the measurement results of the first and second position measuring devices.
- [Appendix 28] The processing system according to any one of Appendix 25 to 27, wherein the position measuring device includes an index member having a fixed relative position with respect to the irradiation device and an index measuring device for measuring the position of the index member.
- the index member includes a marker.
- the index member includes a transmitter capable of transmitting a signal.
- the position measuring device includes an object measuring device that measures the object.
- a robot system including a control device that controls the active vibration isolator and changes the relative position between the object and the end effector.
- the present invention can be appropriately modified within the scope of the claims and within the scope not contrary to the gist or idea of the invention that can be read from the entire specification, and the processing system, processing method, robot system, and connecting device accompanied by such changes. And the end effector device are also included in the technical idea of the present invention.
- Processing device 11 Light irradiation device 111 Light source system 1111 Light source 112 Optical system 114 Housing 1122 Galvano mirror 12 Drive system 121 First drive system 1212 Arm drive system 12121 Arm member 12122 Joint member 12123 Actuator 12124 Tip arm member 122 Second drive system 1223 Air spring 1224 Damper member 1225 Drive member 14, 14d, 14e, 14g Support device 18, 18b Position measurement device 181b Indicator member 182b Index measurement device 19 Mounting member 2 Control device C Recessed CP1 Concave structure CP2 Convex structure EA Target irradiation area EL processing light S processing object SF coating film PE sensitive member SYS processing system SA processing shot area Efa to Eff end effector
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Mechanical Engineering (AREA)
- Plasma & Fusion (AREA)
- Robotics (AREA)
- Laser Beam Processing (AREA)
- Manipulator (AREA)
- Application Of Or Painting With Fluid Materials (AREA)
- Physical Or Chemical Processes And Apparatus (AREA)
- Heating, Cooling, Or Curing Plastics Or The Like In General (AREA)
Priority Applications (9)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/015966 WO2020208808A1 (ja) | 2019-04-12 | 2019-04-12 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
| CN201980095238.8A CN113727804A (zh) | 2019-04-12 | 2019-04-12 | 加工系统、加工方法、机器人系统、连接装置以及终端效果器装置 |
| EP19924157.1A EP3954493B1 (en) | 2019-04-12 | 2019-04-12 | Processing device for and processing method of processing an object by processing light |
| JP2021513135A JP7298681B2 (ja) | 2019-04-12 | 2019-04-12 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
| US17/602,720 US20220281104A1 (en) | 2019-04-12 | 2019-04-12 | Processing system, processing method, robot system, connecting apparatus and end effector apparatus |
| EP24209155.1A EP4477349A3 (en) | 2019-04-12 | 2019-04-12 | Processing device for and processing method of processing an object by processing light |
| TW109112047A TW202042987A (zh) | 2019-04-12 | 2020-04-09 | 加工系統、加工方法、機器人系統、連接裝置以及終端效果器裝置 |
| JP2023096872A JP7639851B2 (ja) | 2019-04-12 | 2023-06-13 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
| JP2025025341A JP2025081529A (ja) | 2019-04-12 | 2025-02-19 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/015966 WO2020208808A1 (ja) | 2019-04-12 | 2019-04-12 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020208808A1 true WO2020208808A1 (ja) | 2020-10-15 |
Family
ID=72751000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/015966 Ceased WO2020208808A1 (ja) | 2019-04-12 | 2019-04-12 | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20220281104A1 (https=) |
| EP (2) | EP4477349A3 (https=) |
| JP (3) | JP7298681B2 (https=) |
| CN (1) | CN113727804A (https=) |
| TW (1) | TW202042987A (https=) |
| WO (1) | WO2020208808A1 (https=) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102021109043A1 (de) | 2021-04-12 | 2022-10-13 | Jenoptik Automatisierungstechnik Gmbh | Verfahren und Steuergerät zum Steuern eines Laser-Bearbeitungsprozesses einer Oberfläche eines Werkstücks und Bearbeitungssystem zum Bearbeiten einer Oberfläche eines Werkstücks mittels eines Laser-Bearbeitungsprozesses |
| EP3960359A4 (en) * | 2019-04-24 | 2023-01-25 | Nikon Corporation | MACHINING DEVICE, MACHINING METHOD AND MACHINING SYSTEM |
| WO2024075357A1 (ja) * | 2022-10-06 | 2024-04-11 | 三菱重工業株式会社 | レーザ加工装置およびレーザ加工方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117066711A (zh) * | 2023-08-16 | 2023-11-17 | 海目星激光科技集团股份有限公司 | 一种产品装夹定位夹具 |
| CN117102159A (zh) * | 2023-09-25 | 2023-11-24 | 上海韵申新能源科技有限公司 | 一种还原炉底盘激光自动清洗机 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4994639A (en) | 1989-01-11 | 1991-02-19 | British Aerospace Public Limited Company | Methods of manufacture and surface treatment using laser radiation |
| JP2003071760A (ja) * | 2001-08-31 | 2003-03-12 | Ricoh Co Ltd | 組立ロボット |
| JP2014508051A (ja) * | 2011-03-16 | 2014-04-03 | フェルロボティクス コンプライアント ロボット テクノロジー ゲーエムベーハー | 接触タスクのための能動的ハンドリング装置および方法 |
| US20170044002A1 (en) | 2014-04-23 | 2017-02-16 | Japan Science And Technology Agency | Combined-blade-type open flow path device and joined body thereof |
| JP2018183853A (ja) * | 2017-04-27 | 2018-11-22 | 住友理工株式会社 | 接触検出装置 |
Family Cites Families (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60214253A (ja) * | 1984-04-10 | 1985-10-26 | Mitsubishi Heavy Ind Ltd | 水中検査装置 |
| JP2901093B2 (ja) * | 1990-11-28 | 1999-06-02 | 株式会社アマダ | レーザパンチプレス、当該パンチプレスに用いるレーザ加工ヘッドユニット、レーザ加工ヘッドユニットとレーザ発振器とを接続する接続装置及びレーザ光路調整時に用いられるビーム検出装置 |
| JPH05272922A (ja) * | 1992-01-29 | 1993-10-22 | Mitsubishi Electric Corp | 視覚センサ装置 |
| JPH0831162A (ja) * | 1994-07-14 | 1996-02-02 | Mitsubishi Electric Corp | ディスク装置 |
| EP0776264A1 (en) * | 1995-05-19 | 1997-06-04 | Waterjet Systems, Inc. | Mobile robotic system |
| JP3930092B2 (ja) * | 1996-04-19 | 2007-06-13 | 株式会社アマダ | レーザ・パンチ複合加工機 |
| JPH09327781A (ja) * | 1996-06-12 | 1997-12-22 | Ishikawajima Harima Heavy Ind Co Ltd | レーザ光照射ヘッド位置決め装置 |
| DE19636458C1 (de) * | 1996-09-07 | 1998-04-02 | Schweistechnische Lehr Und Ver | Manuell zu positionierende und zu betätigende Einrichtung zum Laserstrahlschweißen |
| JPH11309593A (ja) * | 1998-04-22 | 1999-11-09 | Tdk Corp | レーザ位置決め加工方法及び装置 |
| JP2000176760A (ja) * | 1998-12-16 | 2000-06-27 | Amada Eng Center Co Ltd | レーザ・パンチ複合加工機 |
| JP2002239856A (ja) * | 2001-02-16 | 2002-08-28 | Amada Eng Center Co Ltd | 防振装置およびこの防振装置を用いたパンチ・レーザ複合加工機 |
| JP2003048183A (ja) | 2001-08-03 | 2003-02-18 | Mitsubishi Heavy Ind Ltd | 作業装置システム、および、発掘方法 |
| US7363180B2 (en) * | 2005-02-15 | 2008-04-22 | Electro Scientific Industries, Inc. | Method for correcting systematic errors in a laser processing system |
| DE102009021608B4 (de) * | 2009-05-15 | 2015-10-15 | Airbus Operations Gmbh | Einrichtung und Verfahren zum Lackieren gekrümmter Außenoberflächen eines Luftfahrzeuges |
| JP2011194476A (ja) * | 2010-03-17 | 2011-10-06 | Toyota Auto Body Co Ltd | レーザー加工表示装置及びこれを用いたロボットの教示方法 |
| US9839986B2 (en) * | 2014-11-06 | 2017-12-12 | The Boeing Company | Performing surface treatments using an automated guided vehicle |
| GB2536434A (en) * | 2015-03-16 | 2016-09-21 | Sony Corp | A cutting device, cutting equipment and method |
| JP6386501B2 (ja) * | 2016-08-12 | 2018-09-05 | ファナック株式会社 | レーザ加工ロボットシステム及びレーザ加工方法 |
| US10596700B2 (en) * | 2016-09-16 | 2020-03-24 | Carbon Robotics, Inc. | System and calibration, registration, and training methods |
| KR101789673B1 (ko) * | 2016-10-31 | 2017-11-20 | 한국생산기술연구원 | 로봇 가공부하 진동 저감장치 및 이를 이용한 진동 저감방법 |
| EP4730068A2 (en) * | 2017-01-17 | 2026-04-22 | Graco Minnesota Inc. | Unmanned aerial vehicle for painting structures |
| JP6464213B2 (ja) * | 2017-02-09 | 2019-02-06 | ファナック株式会社 | レーザ加工ヘッドおよび撮影装置を備えるレーザ加工システム |
| JP2018167334A (ja) | 2017-03-29 | 2018-11-01 | セイコーエプソン株式会社 | 教示装置および教示方法 |
| DE102017206968B4 (de) * | 2017-04-26 | 2019-10-10 | 4Jet Microtech Gmbh & Co. Kg | Verfahren und Vorrichtung zum Herstellen von Riblets |
| JP7145851B2 (ja) * | 2017-06-13 | 2022-10-03 | 川崎重工業株式会社 | 作業システム |
| CN107962591B (zh) * | 2017-11-23 | 2021-05-07 | 哈尔滨工业大学 | 一种用于柔性机器人关节上能测力矩的被动减振弹性元件 |
| JP6678154B2 (ja) * | 2017-12-05 | 2020-04-08 | 株式会社大気社 | 大型物体用の表面処理システム |
-
2019
- 2019-04-12 JP JP2021513135A patent/JP7298681B2/ja active Active
- 2019-04-12 WO PCT/JP2019/015966 patent/WO2020208808A1/ja not_active Ceased
- 2019-04-12 EP EP24209155.1A patent/EP4477349A3/en active Pending
- 2019-04-12 EP EP19924157.1A patent/EP3954493B1/en active Active
- 2019-04-12 US US17/602,720 patent/US20220281104A1/en active Pending
- 2019-04-12 CN CN201980095238.8A patent/CN113727804A/zh active Pending
-
2020
- 2020-04-09 TW TW109112047A patent/TW202042987A/zh unknown
-
2023
- 2023-06-13 JP JP2023096872A patent/JP7639851B2/ja active Active
-
2025
- 2025-02-19 JP JP2025025341A patent/JP2025081529A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4994639A (en) | 1989-01-11 | 1991-02-19 | British Aerospace Public Limited Company | Methods of manufacture and surface treatment using laser radiation |
| JP2003071760A (ja) * | 2001-08-31 | 2003-03-12 | Ricoh Co Ltd | 組立ロボット |
| JP2014508051A (ja) * | 2011-03-16 | 2014-04-03 | フェルロボティクス コンプライアント ロボット テクノロジー ゲーエムベーハー | 接触タスクのための能動的ハンドリング装置および方法 |
| US20170044002A1 (en) | 2014-04-23 | 2017-02-16 | Japan Science And Technology Agency | Combined-blade-type open flow path device and joined body thereof |
| JP2018183853A (ja) * | 2017-04-27 | 2018-11-22 | 住友理工株式会社 | 接触検出装置 |
Non-Patent Citations (1)
| Title |
|---|
| "Mechanical Engineers' Handbook", article "a4 Fluids Engineering" |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3960359A4 (en) * | 2019-04-24 | 2023-01-25 | Nikon Corporation | MACHINING DEVICE, MACHINING METHOD AND MACHINING SYSTEM |
| US12539561B2 (en) | 2019-04-24 | 2026-02-03 | Nikon Corporation | Processing apparatus, processing method and processing system |
| DE102021109043A1 (de) | 2021-04-12 | 2022-10-13 | Jenoptik Automatisierungstechnik Gmbh | Verfahren und Steuergerät zum Steuern eines Laser-Bearbeitungsprozesses einer Oberfläche eines Werkstücks und Bearbeitungssystem zum Bearbeiten einer Oberfläche eines Werkstücks mittels eines Laser-Bearbeitungsprozesses |
| WO2024075357A1 (ja) * | 2022-10-06 | 2024-04-11 | 三菱重工業株式会社 | レーザ加工装置およびレーザ加工方法 |
| JP2024054891A (ja) * | 2022-10-06 | 2024-04-18 | 三菱重工業株式会社 | レーザ加工装置およびレーザ加工方法 |
| JP7692396B2 (ja) | 2022-10-06 | 2025-06-13 | 三菱重工業株式会社 | レーザ加工装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4477349A3 (en) | 2025-10-15 |
| JP2025081529A (ja) | 2025-05-27 |
| US20220281104A1 (en) | 2022-09-08 |
| JP2023116669A (ja) | 2023-08-22 |
| EP3954493A4 (en) | 2023-01-04 |
| JPWO2020208808A1 (https=) | 2020-10-15 |
| EP3954493A1 (en) | 2022-02-16 |
| EP3954493B1 (en) | 2024-12-04 |
| TW202042987A (zh) | 2020-12-01 |
| JP7639851B2 (ja) | 2025-03-05 |
| JP7298681B2 (ja) | 2023-06-27 |
| EP4477349A2 (en) | 2024-12-18 |
| CN113727804A (zh) | 2021-11-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7639851B2 (ja) | 加工システム、加工方法、ロボットシステム、接続装置及びエンドエフェクタ装置 | |
| JP7601100B2 (ja) | 加工システム | |
| JP7772048B2 (ja) | 処理システム及びロボットシステム | |
| JP2025164838A (ja) | 加工システム及び検査システム | |
| JPWO2019082315A1 (ja) | 加工装置、及び、移動体の製造方法 | |
| JP7639863B2 (ja) | 加工装置、加工方法及び加工システム | |
| JPWO2019082312A1 (ja) | 加工装置、及び、移動体の製造方法 | |
| JPWO2019082310A1 (ja) | 加工装置、及び、移動体の製造方法 | |
| JPWO2019082309A1 (ja) | 加工装置、塗料、加工方法、及び、移動体の製造方法 | |
| TW202042947A (zh) | 加工方法與加工裝置 | |
| JPWO2019082314A1 (ja) | 加工装置、加工システム、及び、移動体の製造方法 | |
| JPWO2019082313A1 (ja) | 加工装置、及び、移動体の製造方法 | |
| JP2022116197A (ja) | 加工装置、及び、移動体の製造方法 | |
| WO2025079197A1 (en) | Processing system for processing an object |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19924157 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2021513135 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019924157 Country of ref document: EP Effective date: 20211112 |