WO2020009063A1 - 測距装置 - Google Patents
測距装置 Download PDFInfo
- Publication number
- WO2020009063A1 WO2020009063A1 PCT/JP2019/026119 JP2019026119W WO2020009063A1 WO 2020009063 A1 WO2020009063 A1 WO 2020009063A1 JP 2019026119 W JP2019026119 W JP 2019026119W WO 2020009063 A1 WO2020009063 A1 WO 2020009063A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- measuring device
- control unit
- accessory
- measurement
- distance
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/56—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/023—Cleaning windscreens, windows or optical devices including defroster or demisting means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/02—Systems using the reflection of electromagnetic waves other than radio waves
- G01S17/06—Systems determining position data of a target
- G01S17/08—Systems determining position data of a target for measuring distance only
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/481—Constructional features, e.g. arrangements of optical elements
- G01S7/4811—Constructional features, e.g. arrangements of optical elements common to transmitter and receiver
- G01S7/4813—Housing arrangements
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S2007/4975—Means for monitoring or calibrating of sensor obstruction by, e.g. dirt- or ice-coating, e.g. by reflection measurement on front-screen
- G01S2007/4977—Means for monitoring or calibrating of sensor obstruction by, e.g. dirt- or ice-coating, e.g. by reflection measurement on front-screen including means to prevent or remove the obstruction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4039—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4039—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating
- G01S7/4043—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating including means to prevent or remove the obstruction
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/40—Means for monitoring or calibrating
- G01S7/4004—Means for monitoring or calibrating of parts of a radar system
- G01S7/4039—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating
- G01S7/4043—Means for monitoring or calibrating of parts of a radar system of sensor or antenna obstruction, e.g. dirt- or ice-coating including means to prevent or remove the obstruction
- G01S7/4047—Heated dielectric lens, e.g. by heated wire
Definitions
- the present disclosure relates to a distance measuring device that measures a distance to an object.
- a distance measuring device that is mounted on the vehicle and measures the distance to the object in front of the vehicle, it irradiates the transmission wave forward, detects the reflected wave of the irradiated transmission wave from the object, and reaches the object
- a distance measuring device that detects the distance of a vehicle.
- a cover is provided on the front surface of the irradiation unit for irradiating the transmission wave and the detection unit for detecting the reflected wave.
- the measurement accuracy of the distance measuring device may decrease.
- Patent Literature 1 describes that a heater is provided on a cover of a distance measuring device in order to melt snow and frost.
- Patent Document 1 discloses that an ultrasonic vibrator is provided on a cover of a distance measuring device in order to repel raindrops and dust.
- One aspect of the present disclosure suppresses a decrease in measurement accuracy of the distance measuring device due to the start and stop of energization of an accessory.
- a distance measuring device which includes a measuring device, a control unit, and an accessory.
- the measuring device includes an irradiating unit that irradiates a transmission wave, and a detecting unit that detects a reflected wave of the transmission wave.
- the control unit measures the distance to the object irradiated with the transmission wave using the measuring device. Attached parts are attached to the measuring instrument and are activated by energization. The control unit controls the energization of the accessory according to the state of the distance measurement using the measuring device.
- the energization to the accessory is controlled according to the distance measurement state using the measuring device, so that the measurement accuracy of the distance measuring device is prevented from deteriorating due to the energization to the accessory. can do.
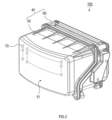
- FIG. 3 is a block diagram illustrating a configuration of a lidar device. It is an outline view of a rider device. It is the figure which looked at the cover of the lidar device from the inside.
- FIG. 3 is a diagram illustrating a relationship between a state of distance measurement by a measuring device and a state of energization of a heater in the first embodiment.
- 5 is a flowchart of a restriction process performed by a control unit in the first embodiment. It is a figure in 2nd Embodiment explaining the relationship between the state of the distance measurement by a measuring device, and the state of energization of a heater.
- 9 is a flowchart of a restriction process performed by a control unit in the second embodiment.
- 13 is a flowchart of a restriction process performed by a control unit in the third embodiment. It is a schematic diagram of a cleaning device.
- a lidar device 100 shown in FIG. 1 is a distance measuring device that irradiates light as a transmission wave and detects a reflected wave of the irradiated light to measure a distance to an object.
- the rider is also described as LIDAR.
- LIDAR is an abbreviation for Light Detection and Ranging.
- the rider device 100 is mounted on a vehicle and used for detecting various objects existing in front of the vehicle.
- the lidar apparatus 100 includes a measuring device 10, an accessory 20, and a control unit 30.
- the measuring device 10 includes an irradiation unit 11 that irradiates light intermittently and a detection unit 12 that detects a reflected wave of light.
- the irradiation unit 11 irradiates laser light as light.
- the detection unit 12 receives a reflected wave from an object and converts the reflected wave into an electric signal.
- the measuring device 10 is housed inside a case 40 having a cover 50 and a case main body 60 shown in FIG.
- the irradiation unit 11 of the measuring device 10 is housed in an upper region of the space inside the case 40.
- the detection unit 12 is housed in a lower region of the space inside the case 40.
- a transparent transmission window 51 through which light passes is provided on the front surface of the cover 50.
- the front surface refers to the surface of the lidar device 100 on the light irradiation side.
- the accessory 20 is a component attached to the measuring instrument 10 and operates when energized.
- the accessory 20 is the heater 80.
- the heater 80 is provided on the inner surface of the transmission window 51 and is used for heating the transmission window 51.
- the heater 80 includes an irradiation-side heater 81 provided on the irradiation unit 11 side of the transmission window 51, and a detection-side heater 82 provided on the detection unit 12 side of the transmission window 51.
- Each of the irradiation-side heater 81 and the detection-side heater 82 has a transparent conductive film Fi and a pair of electrodes LDi and LGi.
- the transparent conductive film Fi is a heater film formed of a material having transparency and electric conductivity.
- an ITO film can be used as the transparent conductive film Fi.
- ITO is an inorganic compound of indium oxide and tin oxide.
- the control unit 30 uses the measuring device 10 to measure the distance from the object irradiated with the light. Specifically, the control unit 30 specifies the timing at which the reflected wave is detected based on the waveform of the electric signal input to the control unit 30 by the detection unit 12, and determines the timing with the object based on the difference from the timing at which the light is irradiated. Seeking distance. In addition, the control unit 30 can obtain information about the object such as the azimuth of the object other than the distance.
- the control unit 30 performs the measurement on a plurality of measurement spots existing within the measurement range, with the irradiation of light toward the specific measurement spot and the detection of the reflected wave as one measurement. Then, the control unit 30 sets a series of measurements for a plurality of measurement spots existing within the measurement range, and repeats the series of measurements at predetermined intervals.
- An area 70 shown in FIG. 2 conceptually shows an area where light irradiated toward a specific measurement spot passes through the surface of the transmission window 51.
- the control unit 30 controls the on / off switching of the power supply to the accessory 20 in addition to the measurement of the distance. That is, the measuring instrument 10 and the accessory 20 are connected to a common circuit board.
- the above-mentioned problem that the measurement accuracy of the measuring device 10 is reduced occurs because noise may be added to the waveform of the electric signal input to the detection unit 12 due to the on / off switching of the power supply to the accessory 20. .
- Switching on / off of the power supply to the accessory 20 is controlled based on information acquired from the vehicle-mounted sensors 200 such as an outside air temperature sensor, a room temperature sensor, and a vehicle speed sensor mounted on the vehicle.
- the vehicle-mounted sensors 200 such as an outside air temperature sensor, a room temperature sensor, and a vehicle speed sensor mounted on the vehicle.
- the switching on / off of the power supply to the accessory 20 may be performed by PWM control.
- control unit 30 restricts the on / off switching of the power supply to the accessory 20 according to the distance measurement state using the measuring device 10.
- the restriction process of switching on / off of energization performed by the control unit 30 will be described later in detail.
- the measuring device 10 temporarily enters a measurement standby state after completing the measurement for one measurement spot. This is generally performed in a lidar apparatus to cool down a light source such as a laser beam and maintain the life of the light source.
- the control unit 30 determines whether the distance is being measured using the measuring device 10 or is waiting for the measurement. If the measurement is being performed, the accessory 30 is attached as shown in a graph (d) of FIG. 20 is not switched on / off. That is, the control unit 30 does not start or stop energization of the accessory 20 during the measurement. This is because there is a possibility that noise may be added to the waveform of the electric signal input to the control unit 30 by the detection unit 12 when the energization of the accessory component 20 is switched on / off.
- control unit 30 determines whether the measurement is being performed or the measurement is waiting, based on whether or not the detection period T1 of the reflected wave by the detection unit 12 is present. That is, the control unit 30 does not start or stop energization of the accessory 20 during the detection period T1 of the detection unit 12.
- the detection period T1 is a period during which the control unit 30 detects a reflected wave using the detection unit 12. Specifically, as shown in graphs (b) and (c) of FIG. 4, the detection period T1 starts at the same time as the start of light irradiation by the irradiation unit 11 or slightly after the start of light irradiation. This is a period until a predetermined period elapses.
- the predetermined period is a period assuming reflection from the farthest object to be detected. That is, the waveform of the electric signal in the detection period T1 is recognized as a reflected wave from the object.
- control unit 30 determines whether to start energizing the accessory 20 or stop energizing the accessory 20 based on information from the vehicle-mounted sensor 200. This is executed when the power condition is satisfied.
- control unit 30 determines whether or not the distance is being measured using the measuring device 10.
- control unit 30 determines that the distance is not being measured using the measuring device 10 in S101, the process proceeds to S102 and starts energization of the accessory 20 or stops energization of the accessory 20. . Thereafter, the control unit 30 ends the restriction processing of FIG.
- control unit 30 determines in S101 that the measurement of the distance using the measuring device 10 is being performed, the process proceeds to S103 and waits until the measurement of the distance using the measuring device 10 ends. Then, the control unit 30 proceeds to S102 and starts energization of the accessory component 20 or stops energization of the accessory component 20. Thereafter, the control unit 30 ends the restriction processing of FIG.
- control unit 30 does not start or stop energizing the accessory 20 when the distance is being measured using the measuring device 10. Therefore, it is possible to suppress the noise from being added to the waveform of the electric signal input to the detection unit 12 due to the start and stop of the energization of the accessory 20.
- the control unit 30 does not start or stop energization of the accessory 20 during the detection period T1 of the reflected wave by the detection unit 12. This is because the decrease in measurement accuracy is caused by noise on the waveform of the electric signal of the reflected wave. According to such a configuration, it is possible to suppress a decrease in measurement accuracy while shortening a period for restricting the on / off switching of energization to the accessory component 20.
- the configuration of the distance measuring device according to the first embodiment is particularly effective for a distance measuring device mounted on a vehicle.
- the control unit 30 does not start or stop energization of the accessory 20 during measurement of each measurement spot.
- the control unit 30 does not start or stop energization to the accessory 20 during a series of measurements on a plurality of measurement spots existing within the measurement range. .
- the state where the control unit 30 performs a series of measurements using the measuring device 10 is called a burst.
- control unit 30 determines whether or not a burst is being performed.
- control unit 30 determines that the burst is not in progress in S201, the control unit 30 proceeds to S202 and starts energization of the accessory component 20 or stops energization of the accessory component 20. After that, the control unit 30 ends the restriction processing of FIG.
- control unit 30 determines that the burst is being performed in S201, the process proceeds to S203 and waits until the burst ends. Then, the control unit 30 proceeds to S202 and starts energization of the accessory component 20 or stops energization of the accessory component 20. After that, the control unit 30 ends the restriction processing of FIG.
- control unit 30 in addition to the case where the control unit 30 is measuring the distance using the measuring device 10 and the case where the period until the next measurement is started is shorter than the predetermined period, the control unit 30 The start of energization and the stop of energization to the heater 80 are not performed.
- a restriction process according to the third embodiment which is executed by the control unit 30 instead of the restriction process according to the first embodiment, will be described with reference to the flowchart in FIG.
- the restriction process shown in FIG. 8 is executed when the control unit 30 satisfies a condition to start energizing the accessory 20 or a condition to stop energizing the accessory 20 based on information from the on-vehicle sensor 200. Is done.
- control unit 30 determines whether or not the distance is being measured using the measuring device 10.
- control unit 30 determines that the distance measurement using the measuring device 10 is not being performed in S301, the process proceeds to S302, and determines whether a period until the next measurement is started is shorter than a predetermined period. judge.
- control unit 30 determines in S302 that the period until the start of the next measurement is not shorter than the predetermined period, the process proceeds to S303, in which the energization of the accessory 20 is started, or the control of the accessory 20 is performed. Stop energization. Thereafter, the control unit 30 ends the restriction processing of FIG.
- control unit 30 determines that the distance is being measured using the measuring device 10 in S301, the control unit 30 proceeds to S304, waits until the measurement is completed, and then proceeds to S303.
- S303 the control unit 30 starts energization of the accessory component 20 or stops energization of the accessory component 20, and then ends the restriction process of FIG.
- control unit 30 determines in S302 that the period until the start of the next measurement is shorter than the predetermined period, the control unit 30 proceeds to S304, waits for the end of the measurement, and then proceeds to S303.
- S303 the control unit 30 starts energization of the accessory component 20 or stops energization of the accessory component 20, and then ends the restriction process of FIG.
- the heater 80 is illustrated as the accessory 20, but the accessory 20 is not limited to this. Specifically, for example, a cleaning device provided on the transmission window 51 to clean the transmission window 51 is provided as the accessory 20.
- FIG. 9 shows a washer 90 as an example of the cleaning device.
- the washer 90 cleans the transmission window 51 by spraying a cleaning liquid onto the transmission window 51.
- Other examples of the cleaner include a wiper and an ultrasonic vibrator.
- the processing of the third embodiment is particularly effective when the accessory component 20 is a component that is moved by a motor.
- a rider device is exemplified as the distance measuring device, but the type of the distance measuring device is not limited to this.
- the distance measuring device include a millimeter wave radar device and an ultrasonic sensor device.
- the control unit 30 determines whether the measurement is being performed or the measurement is being waited for based on whether or not the detection period T1 has elapsed.
- the method of determining whether the measurement is being performed or the measurement is being waited for is not limited to this.
- the control unit 30 may determine whether the measurement is being performed or the measurement is waiting, depending on whether or not the measurement period is independently determined by the control unit 30.
- the measurement period includes, for example, a period T2 shown in the graph (a) of FIG.
- the period T2 refers to a period from when the irradiation unit 11 starts irradiating light to when the detection period T1 ends. When the period T2 starts at the same time as the start of light irradiation, the period T2 is equal to the detection period T1.
- control unit 30 restricts the start and stop of energization to the accessory 20 during the detection period T1 of the detection unit 12.
- the period during which the control unit 30 restricts the start and stop of energization of the accessory component 20 is not limited to the detection period T1 and may include at least the detection period T1.
- the rider device 100 as the distance measuring device is mounted in front of the vehicle, but the mounting position of the distance measuring device on the vehicle is not limited to this. Specifically, for example, the distance measuring device may be mounted around the vehicle, such as on the side or rear of the vehicle.
- the transmission window 51 is a window that transmits both the transmission wave and the reflection wave.
- the transmission window 51 may be configured to transmit at least one of the transmission wave and the reflection wave.
- the transmission window 51 is transparent so as to transmit light as a transmission wave, but the transmission window 51 does not need to be transparent as long as it transmits the transmission wave. That is, the transmission window 51 can be made of various materials depending on the type of the transmission wave.
- the functions of one component in the above embodiment may be distributed as a plurality of components, or the functions of a plurality of components may be integrated into one component. Further, a part of the configuration of the above embodiment may be omitted. In addition, at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of another above embodiment.
Abstract
測距装置(100)は、測定器(10)と、制御部(30)と、付属部品(20)と、を備える。測定器は、送信波を照射する照射部(11)と、送信波の反射波を検出する検出部(12)と、を有する。制御部は、測定器を用いて、送信波が照射された物体との距離を測定する。付属部品は、測定器に付属し、通電によって作動する。制御部は、測定器を用いた距離の測定状態に応じて、付属部品への通電を制御する。
Description
本国際出願は、2018年7月2日に日本国特許庁に出願された日本国特許出願第2018-126093号に基づく優先権を主張するものであり、日本国特許出願第2018-126093号の全内容を本国際出願に参照により援用する。
本開示は、物体との距離を測定する測距装置に関する。
車両に搭載され、車両の前方にある物体との距離を測定する測距装置として、送信波を前方に向けて照射し、照射した送信波の物体からの反射波を検出して、その物体までの距離を検出する測距装置がある。
測距装置においては、送信波を照射する照射部や反射波を検出する検出部を保護するため、これらの前面にカバーが設けられている。しかし、そのカバーに、雪、霜、雨滴及び埃などが付着すると、測距装置の測定精度が低下する場合がある。
そこで、特許文献1には、雪や霜を融かすために測距装置のカバーにヒータを設けることが記載されている。また、特許文献1には、雨滴や埃を撥ね飛ばすために、測距装置のカバーに超音波振動子を設けることが記載されている。
しかしながら、本発明者の検討の結果、測距装置がヒータや超音波振動子などの付属部品を有する場合に、測定精度の低下が起こることが新たな課題として見いだされた。これは、付属部品に対して通電を開始する際に、及び付属部品への通電を停止する際に、測距装置の測定結果に電気的なノイズがのるためであると考えられる。
本開示の一局面は、付属部品への通電の開始及び停止によって測距装置の測定精度が低下するのを抑制する。
本開示の一態様は、測距装置であって、測定器と、制御部と、付属部品と、を備える。測定器は、送信波を照射する照射部と、送信波の反射波を検出する検出部と、を有する。制御部は、測定器を用いて、送信波が照射された物体との距離を測定する。付属部品は、測定器に付属し、通電によって作動する。制御部は、測定器を用いた距離の測定状態に応じて、付属部品への通電を制御する。
このような構成によれば、付属部品への通電が、測定器を用いた距離の測定状態に応じて制御されるため、付属部品への通電によって測距装置の測定精度が低下するのを抑制することができる。
以下、本開示の例示的な実施形態について図面を参照しながら説明する。
[1.第1実施形態]
[1-1.構成]
図1に示すライダ装置100は、送信波として光を照射し、照射した光の反射波を検出することによって物体との距離を測定する測距装置である。ライダはLIDARとも表記される。LIDARは、Light Detection and Rangingの略語である。ライダ装置100は、車両に搭載して使用され、車両の前方に存在する様々な物体の検出に用いられる。
[1-1.構成]
図1に示すライダ装置100は、送信波として光を照射し、照射した光の反射波を検出することによって物体との距離を測定する測距装置である。ライダはLIDARとも表記される。LIDARは、Light Detection and Rangingの略語である。ライダ装置100は、車両に搭載して使用され、車両の前方に存在する様々な物体の検出に用いられる。
ライダ装置100は、測定器10と、付属部品20と、制御部30と、を備えている。
測定器10は、光を間欠的に照射する照射部11と、光の反射波を検出する検出部12と、を有する。照射部11は、光としてレーザ光を照射する。検出部12は、物体からの反射波を受信して電気信号に変換する。
測定器10は、図2に示すカバー50とケース本体60とを備えるケース40の内部に収納されている。測定器10のうち照射部11は、ケース40の内側の空間のうち上側の領域に収納されている。一方、検出部12は、ケース40の内側の空間のうち下側の領域に収納されている。
カバー50の前面には、光が透過する透明の透過窓51が設けられている。ここでいう前面とは、ライダ装置100における光の照射先側の面を指す。
付属部品20は、測定器10に付属する部品であり、通電によって作動する。本実施形態において、付属部品20はヒータ80である。ヒータ80は、図3に示すように、透過窓51の内側の面に設けられ、透過窓51の加熱に用いられる。ヒータ80は、透過窓51における照射部11側に設けられた照射側ヒータ81と、透過窓51における検出部12側に設けられた検出側ヒータ82と、を備える。照射側ヒータ81及び検出側ヒータ82は、いずれも透明導電膜Fiと、一対の電極LDi,LGiとを有する。なお、iは、照射側ヒータ81に属する場合は1、検出側ヒータ82に属する場合は2で示す。透明導電膜Fiは、透明性と電気伝導性とを有する材料で形成されたヒータ膜である。透明導電膜Fiとしては、例えば、ITO膜を用いることができる。ITOは、酸化インジウムと酸化スズの無機化合物である。
制御部30は、測定器10を用いて、光が照射された物体との距離を測定する。具体的には、制御部30は、検出部12が制御部30に入力する電気信号の波形に基づき反射波が検出されたタイミングを特定し、光を照射したタイミングとの差分に基づき物体との距離を求めている。なお、制御部30は、距離以外にもその物体の方位などの物体に関する情報を求めることができる。
制御部30は、特定の測定スポットに向けた光の照射と反射波の検出とを一回の測定として、この測定を測定範囲内に存在する複数の測定スポットに対して行っている。そして、制御部30は、測定範囲内に存在する複数の測定スポットに対する測定を一連の測定とし、この一連の測定を所定期間ごとに繰り返し行っている。図2に示す領域70は、特定の測定スポットに向けて照射した光が透過窓51の面において通過する領域を概念的に示している。
制御部30は、距離の測定に加えて、付属部品20への通電のオン/オフの切替えも制御している。すなわち、測定器10と付属部品20とは共通の回路基板に接続されている。前述した測定器10の測定精度が低下するという課題は、付属部品20への通電のオン/オフの切替えによって、検出部12が入力する電気信号の波形にノイズがのることがあるために生じる。
付属部品20への通電のオン/オフの切替えは、車両に搭載された外気温センサ、室温センサ、及び車速センサなどの車載センサ200から取得した情報に基づいて制御される。透過窓51を付属部品20によって適度に加熱することで、雪や霜の付着を抑制することができる。なお、付属部品20への通電のオン/オフの切替えはPWM制御によって行われてもよい。
このとき、制御部30は、測定器10を用いた距離の測定状態に応じて、付属部品20への通電のオン/オフの切替えを制限する。制御部30が行う通電のオン/オフの切替えの制限処理については、後に詳述する。
[1-2.処理]
制御部30が実行する付属部品20への通電のオン/オフの切替えの制限処理について、その概要を、図4を用いて説明する。
制御部30が実行する付属部品20への通電のオン/オフの切替えの制限処理について、その概要を、図4を用いて説明する。
測定器10は、図4のグラフ(a)に示すように、一つの測定スポットに対する測定を終えると、一時的に測定の待機状態となる。これは、レーザ光などの光源をクールダウンさせ光源の寿命を維持するためにライダ装置で一般的に行われるものである。
制御部30は、測定器10を用いた距離の測定中であるか測定の待機中であるかを判別し、測定中である場合には、図4のグラフ(d)に示すように付属部品20のオン/オフの切替えを行わないこととする。すなわち、制御部30は、測定中である場合には、付属部品20への通電の開始及び停止を行わないこととする。付属部品20への通電のオン/オフの切替えの際には、検出部12が制御部30に入力する電気信号の波形にノイズがのる可能性があるからである。
本実施形態において、制御部30は、測定中であるか測定の待機中であるかを、検出部12による反射波の検出期間T1であるか否かで判別する。すなわち、制御部30は、検出部12による検出期間T1中は、付属部品20への通電の開始及び停止を行わない。
検出期間T1とは、制御部30が検出部12を用いて反射波を検出している期間である。具体的には、図4のグラフ(b)及び(c)に示すように、検出期間T1は、照射部11による光の照射の開始と同時又は光の照射の開始から少し遅れて始まり、あらかじめ決められた所定の期間が経過するまでの期間である。所定の期間は、検出したい最も遠くの物体からの反射を想定した期間である。つまり、検出期間T1における電気信号の波形が、物体からの反射波として認識される。
次いで、制御部30が実行する具体的な処理手順について、図5のフローチャートを用いて説明する。図5に示す通電のオン/オフの切替えの制限処理は、制御部30が車載センサ200からの情報に基づき、付属部品20への通電を開始すべき条件又は付属部品20への通電を停止すべき条件が成立した場合に実行される。
まず、S101で、制御部30は、測定器10を用いた距離の測定中であるか否かを判定する。
制御部30は、S101で測定器10を用いた距離の測定中でないと判定した場合には、S102へ移行し、付属部品20への通電を開始する、又は付属部品20への通電を停止する。その後、制御部30は、図5の制限処理を終了する。
一方、制御部30は、S101で測定器10を用いた距離の測定中であると判定した場合には、S103へ移行し、測定器10を用いた距離の測定が終了するまで待つ。そして、制御部30は、S102へ移行し、付属部品20への通電を開始する、又は付属部品20への通電を停止する。その後、制御部30は、図5の制限処理を終了する。
[1-3.効果]
以上詳述した第1実施形態によれば、以下の効果が得られる。
以上詳述した第1実施形態によれば、以下の効果が得られる。
(1a)付属部品20への通電の開始及び停止が、測定器10を用いた距離の測定状態に応じて制御される。そのため、付属部品20への通電の開始及び停止によって測距装置の測定精度が低下するのを抑制することができる。
(1b)具体的には、制御部30は、測定器10を用いた距離の測定中である場合に、付属部品20への通電の開始及び停止を行わない。そのため、付属部品20への通電の開始及び停止によって、検出部12が入力する電気信号の波形にノイズがのってしまうことを抑制することができる。
(1c)制御部30は、検出部12による反射波の検出期間T1中は、付属部品20への通電の開始及び停止を行わない。測定精度の低下は、反射波の電気信号の波形にノイズがのることが原因で生じるからである。このような構成によれば、付属部品20への通電のオン/オフの切替えを制限する期間を短くしつつ、測定精度の低下を抑制できる。
(1d)自動運転技術の進展により、車両に搭載される測距装置に求められる測定精度が高くなってきている。第1実施形態にかかる測距装置の構成は、車両に搭載される測距装置に特に有効である。
[2.第2実施形態]
[2-1.第1実施形態との相違点]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。
[2-1.第1実施形態との相違点]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。
前述した第1実施形態では、制御部30が、付属部品20への通電の開始及び停止を行わないのは、各測定スポットに対する測定中である。一方、第2実施形態では、制御部30が、図6に示すように、測定範囲内に存在する複数の測定スポットに対する一連の測定中は、付属部品20への通電の開始及び停止を行わない。なお、制御部30が、測定器10を用いて一連の測定を行っている状態をバーストと呼ぶ。
[2-2.処理]
制御部30が、第1実施形態における制限処理に代えて実行する第2実施形態の制限処理について、図7のフローチャートを用いて説明する。図7に示す制限処理は、制御部30が車載センサ200からの情報に基づき、付属部品20への通電を開始すべき条件又は付属部品20への通電を停止すべき条件が成立した場合に実行される。
制御部30が、第1実施形態における制限処理に代えて実行する第2実施形態の制限処理について、図7のフローチャートを用いて説明する。図7に示す制限処理は、制御部30が車載センサ200からの情報に基づき、付属部品20への通電を開始すべき条件又は付属部品20への通電を停止すべき条件が成立した場合に実行される。
まず、S201で、制御部30は、バースト中であるか否かを判定する。
制御部30は、S201でバースト中でないと判定した場合には、S202へ移行し、付属部品20への通電を開始する、又は付属部品20への通電を停止する。その後、制御部30は、図7の制限処理を終了する。
一方、制御部30は、S201でバースト中であると判定した場合には、S203へ移行し、バーストが終了するまで待つ。そして、制御部30は、S202へ移行し、付属部品20への通電を開始する、又は付属部品20への通電を停止する。その後、制御部30は、図7の制限処理を終了する。
[3.第3実施形態]
[3-1.第1実施形態との相違点]
第3実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。
[3-1.第1実施形態との相違点]
第3実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。
第3実施形態では、制御部30が、測定器10を用いた距離の測定中である場合に加え、次の測定を開始するまでの期間が所定の期間未満である場合に、ヒータ80への通電の開始及びヒータ80への通電の停止を行わない。
[3-2.処理]
制御部30が、第1実施形態における制限処理に代えて実行する第3実施形態の制限処理について、図8のフローチャートを用いて説明する。図8に示す制限処理は、制御部30が車載センサ200からの情報に基づき、付属部品20への通電を開始すべき条件又は付属部品20への通電を停止すべき条件が成立した場合に実行される。
制御部30が、第1実施形態における制限処理に代えて実行する第3実施形態の制限処理について、図8のフローチャートを用いて説明する。図8に示す制限処理は、制御部30が車載センサ200からの情報に基づき、付属部品20への通電を開始すべき条件又は付属部品20への通電を停止すべき条件が成立した場合に実行される。
まず、S301で、制御部30は、測定器10を用いた距離の測定中であるか否かを判定する。
制御部30は、S301で測定器10を用いた距離の測定中でないと判定した場合には、S302へ移行し、次の測定を開始するまでの期間が所定の期間未満であるか否かを判定する。
制御部30は、S302で次の測定を開始するまでの期間が所定の期間未満でないと判定した場合には、S303へ移行し、付属部品20への通電を開始する、又は付属部品20への通電を停止する。その後、制御部30は、図8の制限処理を終了する。
一方、制御部30は、S301で測定器10を用いた距離の測定中であると判定した場合には、S304へ移行し、測定終了まで待った後、S303へ移行する。制御部30は、S303で、付属部品20への通電を開始、又は付属部品20への通電を停止した後、図8の制限処理を終了する。
制御部30は、S302で次の測定を開始するまでの期間が所定の期間未満であると判定した場合には、S304へ移行し、測定終了まで待った後、S303へ移行する。制御部30は、S303で、付属部品20への通電を開始、又は付属部品20への通電を停止した後、図8の制限処理を終了する。
[3-3.効果]
以上詳述した第3実施形態によれば、前述した第1実施形態の効果(1a)、(1b)及び(1d)に加え、以下の効果が得られる。
以上詳述した第3実施形態によれば、前述した第1実施形態の効果(1a)、(1b)及び(1d)に加え、以下の効果が得られる。
(3a)付属部品20への通電のオン/オフの切替えの際に、チャタリング等により少しの間ノイズが続く場合がある。本実施形態によれば、このような場合であっても、測定結果へのノイズの影響を抑えることができる。すなわち、通電のオン/オフの切替えから次の測定を開始するまでの期間内に、継続して生じているノイズの強度が閾値以下となるように、上記の所定の期間を定めることで、次の測定において得られる電気信号の波形にノイズがのることを抑えることができる。
[4.他の実施形態]
以上、本開示の実施形態について説明したが、本開示は、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。
以上、本開示の実施形態について説明したが、本開示は、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。
(4a)上記実施形態では、付属部品20としてヒータ80を例示しているが、付属部品20はこれに限定されるものではない。具体的には、付属部品20として例えば、透過窓51に設けられ、透過窓51を清掃する清掃器が挙げられる。
図9に清掃器の一例としてウォッシャー90を示す。ウォッシャー90は、透過窓51に対して洗浄液を噴射することによって、透過窓51を洗浄する。清掃器の他の例としてはワイパー及び超音波振動子が挙げられる。
なお、付属部品20がこれらウォッシャー及びワイパーなどのモータによって動く部品である場合、チャタリングが生じやすい。したがって、上記第3実施形態の処理は、特に付属部品20がモータによって動く部品である場合に有効である。
(4b)上記実施形態では、測距装置としてライダ装置を例示しているが、測距装置の種類はこれに限定されるものではない。具体的には、測距装置として例えば、ミリ波レーダ装置及び超音波センサ装置が挙げられる。
(4c)上記実施形態では、制御部30が、測定中であるか測定の待機中であるかを、検出期間T1であるか否かで判別している。しかし、測定中であるか測定の待機中であるかの判別方法は、これに限定されるものではない。具体的には、制御部30は、測定中であるか測定の待機中であるかを、制御部30が独自に定める測定期間であるか否かで判別してもよい。測定期間としては、例えば、図4のグラフ(a)に示す期間T2が挙げられる。期間T2は、照射部11が光の照射を開始してから、検出期間T1が終わるまでの期間を指す。なお、期間T2が光の照射の開始と同時に始まる場合、期間T2と検出期間T1とは等しい。
(4d)上記第1実施形態では、制御部30は、検出部12による検出期間T1中は、付属部品20への通電の開始及び停止を制限している。制御部30が付属部品20への通電の開始及び停止を制限する期間は、検出期間T1に限らず、少なくとも検出期間T1が含まれればよい。
(4e)上記実施形態では、測距装置としてのライダ装置100が車両の前方に搭載されているが、測距装置の車両への搭載位置はこれに限定されるものではない。具体的には、例えば、測距装置が車両の側方や後方などの周囲に搭載されていてもよい。
(4f)上記実施形態では、透過窓51が送信波及び反射波の両方を透過する窓であるが、透過窓51は、送信波及び反射波の少なくとも一方が透過するように構成されていてもよい。また、上記実施形態では、透過窓51が、送信波としての光を透過できるように透明であるが、透過窓51は送信波を透過するのであれば透明である必要はない。すなわち、透過窓51は送信波の種類によって様々な材質をとりうる。
(4g)上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の一部を省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。
Claims (8)
- 送信波を照射する照射部(11)と、前記送信波の反射波を検出する検出部(12)と、を有する測定器(10)と、
前記測定器を用いて、前記送信波が照射された物体との距離を測定する制御部(30)と、
前記測定器に付属し、通電によって作動する付属部品(20)と、
を備え、
前記制御部は、前記測定器を用いた距離の測定状態に応じて、前記付属部品への通電を制御する、測距装置(100)。 - 前記測距装置は、前記送信波として光を照射するライダ装置である、請求項1に記載の測距装置。
- 前記測距装置は、前記送信波及び前記反射波の少なくとも一方が透過する透過窓(51)を更に備え、
前記付属部品は、前記透過窓に設けられたヒータ(80)を含む、請求項1又は請求項2に記載の測距装置。 - 前記測距装置は、前記送信波及び前記反射波の少なくとも一方が透過する透過窓を更に備え、
前記付属部品は、前記透過窓に設けられ、前記透過窓を清掃する清掃器(90)を含む、請求項1~請求項3のいずれか1項に記載の測距装置。 - 前記制御部は、前記測定器を用いた距離の測定中である場合に、前記付属部品への通電の開始及び前記付属部品への通電の停止を行わない、請求項1~請求項4のいずれか1項に記載の測距装置。
- 前記照射部は送信波を間欠的に照射し、
前記制御部は前記照射部の間欠的な照射に起因して、前記測定器を用いた距離の測定の際、測定中と待機中の各状態を繰り返すものであって、
前記制御部は、前記測定器を用いた距離の測定中である場合に加え、次の測定を開始するまでの期間が所定の期間未満である場合に、前記付属部品への通電の開始及び前記付属部品への通電の停止を行わない、請求項5に記載の測距装置。 - 前記制御部は、少なくとも前記検出部による前記反射波の検出期間中は、前記付属部品への通電の開始及び前記付属部品への通電の停止を行わない、請求項5又は請求項6に記載の測距装置。
- 前記制御部は、前記測定器を用いて測定範囲内の複数の測定スポットの測定である一連の測定を繰り返し行い、前記一連の測定中である場合に、前記付属部品への通電の開始及び前記付属部品への通電の停止を行わない、請求項1~請求項7のいずれか1項に記載の測距装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980044577.3A CN112368595A (zh) | 2018-07-02 | 2019-07-01 | 测距装置 |
| DE112019003357.3T DE112019003357T5 (de) | 2018-07-02 | 2019-07-01 | Distanzmessvorrichtung |
| US17/138,681 US20210116544A1 (en) | 2018-07-02 | 2020-12-30 | Distance measuring device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018-126093 | 2018-07-02 | ||
| JP2018126093A JP7028085B2 (ja) | 2018-07-02 | 2018-07-02 | 測距装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US17/138,681 Continuation US20210116544A1 (en) | 2018-07-02 | 2020-12-30 | Distance measuring device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020009063A1 true WO2020009063A1 (ja) | 2020-01-09 |
Family
ID=69060348
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/026119 WO2020009063A1 (ja) | 2018-07-02 | 2019-07-01 | 測距装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20210116544A1 (ja) |
| JP (1) | JP7028085B2 (ja) |
| CN (1) | CN112368595A (ja) |
| DE (1) | DE112019003357T5 (ja) |
| WO (1) | WO2020009063A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2022071331A1 (ja) * | 2020-09-30 | 2022-04-07 | ||
| DE102021200098A1 (de) * | 2021-01-08 | 2022-07-14 | Robert Bosch Gesellschaft mit beschränkter Haftung | Reinigungsvorrichtung, LiDAR-Sensoranordnung und Arbeitsvorrichtung |
| JP2022191079A (ja) * | 2021-06-15 | 2022-12-27 | スタンレー電気株式会社 | ヒータ制御装置、ヒータ制御方法、車両用灯具 |
| JP7338666B2 (ja) * | 2021-09-09 | 2023-09-05 | 豊田合成株式会社 | 電磁波センサカバー |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0829535A (ja) * | 1994-07-12 | 1996-02-02 | Nissan Diesel Motor Co Ltd | 車両のレーザレーダ装置 |
| JPH10206543A (ja) * | 1997-01-22 | 1998-08-07 | Denso Corp | 距離計測装置 |
| JPH11183611A (ja) * | 1997-12-18 | 1999-07-09 | Hino Motors Ltd | 車載用レーダ装置 |
| JP2000321348A (ja) * | 1999-05-17 | 2000-11-24 | Honda Motor Co Ltd | レーダ装置 |
| JP2003057339A (ja) * | 2001-06-07 | 2003-02-26 | Nissan Motor Co Ltd | 物体検出装置 |
| JP2009192430A (ja) * | 2008-02-15 | 2009-08-27 | Honda Motor Co Ltd | 物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム |
| US20160176384A1 (en) * | 2014-12-19 | 2016-06-23 | Continental Automotive Systems, Inc. | Sensor cleaning system |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3622426B2 (ja) * | 1997-07-07 | 2005-02-23 | 日産自動車株式会社 | 前方警報装置 |
| DE10012004A1 (de) * | 2000-03-11 | 2001-09-27 | Bosch Gmbh Robert | Einrichtung zum Sauberhalten optischer Elemente in Kraftfahrzeugen, insbesondere von Sensor- oder Kamera-Abdeckungen |
| JP2004023159A (ja) * | 2002-06-12 | 2004-01-22 | Olympus Corp | 電子撮像装置 |
| JP3942518B2 (ja) * | 2002-09-13 | 2007-07-11 | 株式会社錢高組 | 路面測定装置 |
| CN100364828C (zh) * | 2006-02-28 | 2008-01-30 | 曹新志 | 铁路列车轴温探测器自动除雪装置 |
| JP5056919B2 (ja) * | 2009-09-29 | 2012-10-24 | 株式会社デンソー | 車載光学センサカバー及び車載光学センサ装置 |
| CN203687887U (zh) * | 2013-12-31 | 2014-07-02 | 北京维天信气象设备有限公司 | 激光雪深测量仪 |
| JP2016150688A (ja) * | 2015-02-18 | 2016-08-22 | 株式会社デンソー | ワイパー制御装置 |
| JP6565626B2 (ja) * | 2015-11-18 | 2019-08-28 | 株式会社デンソーウェーブ | レーザレーダ装置 |
-
2018
- 2018-07-02 JP JP2018126093A patent/JP7028085B2/ja active Active
-
2019
- 2019-07-01 CN CN201980044577.3A patent/CN112368595A/zh active Pending
- 2019-07-01 DE DE112019003357.3T patent/DE112019003357T5/de active Pending
- 2019-07-01 WO PCT/JP2019/026119 patent/WO2020009063A1/ja active Application Filing
-
2020
- 2020-12-30 US US17/138,681 patent/US20210116544A1/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0829535A (ja) * | 1994-07-12 | 1996-02-02 | Nissan Diesel Motor Co Ltd | 車両のレーザレーダ装置 |
| JPH10206543A (ja) * | 1997-01-22 | 1998-08-07 | Denso Corp | 距離計測装置 |
| JPH11183611A (ja) * | 1997-12-18 | 1999-07-09 | Hino Motors Ltd | 車載用レーダ装置 |
| JP2000321348A (ja) * | 1999-05-17 | 2000-11-24 | Honda Motor Co Ltd | レーダ装置 |
| JP2003057339A (ja) * | 2001-06-07 | 2003-02-26 | Nissan Motor Co Ltd | 物体検出装置 |
| JP2009192430A (ja) * | 2008-02-15 | 2009-08-27 | Honda Motor Co Ltd | 物体種別判定装置、物体種別判定方法、及び物体種別判定用プログラム |
| US20160176384A1 (en) * | 2014-12-19 | 2016-06-23 | Continental Automotive Systems, Inc. | Sensor cleaning system |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112019003357T5 (de) | 2021-03-18 |
| CN112368595A (zh) | 2021-02-12 |
| US20210116544A1 (en) | 2021-04-22 |
| JP7028085B2 (ja) | 2022-03-02 |
| JP2020003455A (ja) | 2020-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2020009063A1 (ja) | 測距装置 | |
| JP3915742B2 (ja) | 車両用物体認識装置 | |
| JP2897142B2 (ja) | 降雨検知器を備えるフロントガラスワイパー制御装置 | |
| JP2006194639A (ja) | レーダ装置 | |
| JP7077882B2 (ja) | 測距装置 | |
| KR20190130923A (ko) | 라이다 센서 세척 장치 | |
| JPH04138390A (ja) | 車両用測距装置 | |
| JP7010180B2 (ja) | 測距装置 | |
| CN107428314A (zh) | 风挡监测系统 | |
| KR19990082870A (ko) | 물방울 검출센서 | |
| KR102393440B1 (ko) | 라이다 센서 및 그 제어 방법 | |
| US10328843B2 (en) | Driving assistance system with short-distance ranging | |
| JP5151169B2 (ja) | 計測装置及び車両制御装置並びに警報装置 | |
| JP2009085920A (ja) | 車両用レーザレーダ装置および車両用レーザレーダ装置の汚れ判定方法 | |
| JP3622314B2 (ja) | 車両用レーザレーダ装置 | |
| JPH0330116B2 (ja) | ||
| WO2021153735A1 (ja) | 報知装置 | |
| JP7143800B2 (ja) | ライダ装置 | |
| JP7205389B2 (ja) | 車載センサ洗浄装置 | |
| JP2001330559A (ja) | 異物検出装置およびそれを用いたオートワイパ制御装置 | |
| JP2012150049A (ja) | 障害物検知装置 | |
| JPH0519935B2 (ja) | ||
| JP7388014B2 (ja) | 測距装置 | |
| JP2579554Y2 (ja) | 車間距離測定装置 | |
| US11571725B2 (en) | Localization of debris on optical surface of vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19829752 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19829752 Country of ref document: EP Kind code of ref document: A1 |