WO2019187659A1 - 建設機械 - Google Patents
建設機械 Download PDFInfo
- Publication number
- WO2019187659A1 WO2019187659A1 PCT/JP2019/004150 JP2019004150W WO2019187659A1 WO 2019187659 A1 WO2019187659 A1 WO 2019187659A1 JP 2019004150 W JP2019004150 W JP 2019004150W WO 2019187659 A1 WO2019187659 A1 WO 2019187659A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- bucket
- construction machine
- work
- yaw
- ground
- Prior art date
Links
- 238000010276 construction Methods 0.000 title claims abstract description 92
- 238000009412 basement excavation Methods 0.000 claims abstract description 43
- 210000000078 claw Anatomy 0.000 claims description 43
- 230000015572 biosynthetic process Effects 0.000 abstract 1
- 230000036544 posture Effects 0.000 description 30
- 238000001514 detection method Methods 0.000 description 6
- 230000006870 function Effects 0.000 description 5
- 230000008602 contraction Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 239000010720 hydraulic oil Substances 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 238000012876 topography Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 239000004576 sand Substances 0.000 description 1
- 201000009482 yaws Diseases 0.000 description 1
Images









Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
- E02F3/437—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like providing automatic sequences of movements, e.g. linear excavation, keeping dipper angle constant
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/3604—Devices to connect tools to arms, booms or the like
- E02F3/3677—Devices to connect tools to arms, booms or the like allowing movement, e.g. rotation or translation, of the tool around or along another axis as the movement implied by the boom or arms, e.g. for tilting buckets
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/3604—Devices to connect tools to arms, booms or the like
- E02F3/3677—Devices to connect tools to arms, booms or the like allowing movement, e.g. rotation or translation, of the tool around or along another axis as the movement implied by the boom or arms, e.g. for tilting buckets
- E02F3/3681—Rotators
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/40—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets
- E02F3/402—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with means for facilitating the loading thereof, e.g. conveyors
- E02F3/405—Dippers; Buckets ; Grab devices, e.g. manufacturing processes for buckets, form, geometry or material of buckets with means for facilitating the loading thereof, e.g. conveyors using vibrating means
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
- E02F3/43—Control of dipper or bucket position; Control of sequence of drive operations
- E02F3/435—Control of dipper or bucket position; Control of sequence of drive operations for dipper-arms, backhoes or the like
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
- E02F9/221—Arrangements for controlling the attitude of actuators, e.g. speed, floating function for generating actuator vibration
Definitions
- the present invention relates to a construction machine such as a hydraulic excavator.
- any one of the boom cylinder, the arm cylinder, and the bucket cylinder is used to vibrate the bucket during excavation work.
- a technique is known that operates and thereby reduces excavation resistance (resistance received by the bucket entering the ground from the ground).
- boom cylinder, arm cylinder, and bucket cylinder as described above are hydraulic cylinders having a relatively large capacity, it is difficult to vibrate the bucket quickly (that is, in a short cycle).
- each of the boom cylinder, arm cylinder, and bucket cylinder normally rotates the boom, arm, and bucket in the pitch direction, the vibration of the bucket by the operation control of these hydraulic cylinders is in the pitch direction. It is easy to generate waviness and unevenness on the construction surface formed by excavation work.
- An object of the present invention is to provide a construction machine capable of reducing the resistance of a bucket received from the ground and improving the smoothness of a construction surface.
- a construction machine comprising an airframe, a work device mounted on the airframe, and a control device that controls the operation of the work device, the work device being coupled to the airframe.
- a work device body having a base end portion and a tip portion on the opposite side, and a first rotation operation and a second rotation operation relative to the tip portion of the work device relative to the tip portion.
- a plurality of bucket actuators that move the bucket relative to the working device main body, and the first rotation operation is parallel to the width direction of the bucket.
- a pitch operation that is a rotation operation around the bucket horizontal axis in a certain direction
- the second rotation operation is a rotation operation around an axis orthogonal to the bucket horizontal axis
- the plurality of bucket actuators are: Previous to the bucket A first bucket actuator that performs a first rotation operation; and a second bucket actuator that causes the bucket to perform a second rotation operation, wherein the control device is configured so that the bucket is in pressure contact with the ground.
- the second bucket actuator is configured to control the bucket to periodically vibrate by the second rotation operation.
- 1 is a side view showing an overall configuration of a hydraulic excavator that is a construction machine according to a first embodiment of the present invention. It is a side view which shows the principal part containing the bucket which concerns on the said 1st Embodiment. It is a block diagram which shows the function structure of the control apparatus of the said construction machine which concerns on the said 1st Embodiment. It is a graph which shows the time change of the yaw angle of the bucket concerning the 1st embodiment. It is a bottom view which shows the yaw vibration of the said bucket which concerns on the said 1st Embodiment. It is a side view which shows the said principal part containing the said bucket which concerns on the said 1st Embodiment.
- FIG. 1 shows a construction machine 1 according to this embodiment.
- the construction machine 1 is, for example, a hydraulic excavator.
- the construction machine 1 includes a crawler type traveling body 2, a revolving body 3 that is mounted on the traveling body 2 so as to be able to swivel, and a work device 4 attached to the revolving body 3.
- the traveling operation of the traveling body 2 and the turning operation of the revolving structure 3 are each driven by a hydraulic motor (not shown).
- the swivel body 3 includes a driver's cab 3a located at the front and a machine room 3b located at the rear.
- the machine room 3b stores an engine (not shown) and various hydraulic devices (such as a hydraulic pump and a direction switching valve).
- the working device 4 includes a boom 10, an arm 20, a bucket 30, and a plurality of hydraulic cylinders.
- the boom 10 and the arm 20 constitute a work apparatus main body.
- the boom 10 has a proximal end portion and a distal end portion on the opposite side.
- the base end portion corresponds to a base end portion of the work apparatus main body, and the base of the boom 10 is extended in a posture in which the boom 10 extends from an appropriate place of the revolving unit 3, for example, a side of the operator cab 3a.
- An end is connected to the revolving unit 3.
- the arm 20 has a proximal end portion connected to the distal end portion of the boom 10 in a posture such that the arm 20 further extends from the distal end portion of the boom 10, and a distal end portion on the opposite side.
- the bucket 30 is attached to the distal end portion of the arm 20 which is the distal end portion of the working apparatus main body.
- the plurality of hydraulic cylinders include a boom cylinder 12, an arm cylinder 22, and a bucket cylinder 32.
- the boom 10 is pivotally supported on the revolving structure 3 via a support shaft 11 so as to be able to perform a pitch operation relative to the revolving structure 3.
- the pitch operation is a rotation operation around the horizontal axis of the revolving structure 3.
- the boom 10 is connected to the swing body 3 via the boom cylinder 12 which is a boom hydraulic cylinder.
- the boom cylinder 12 extends and contracts to cause the boom 10 to perform a rotation operation around the axis of the support shaft 11, that is, the pitch operation.
- the arm 20 is attached to the tip of the boom 10 via a support shaft 21 so as to be able to perform the pitch operation relative to the boom 10, that is, the rotation operation about the horizontal axis of the revolving structure 3. It is pivotally supported.
- the arm 20 is connected to the boom 10 via the arm cylinder 22 which is an arm hydraulic cylinder.
- the arm cylinder 22 extends and contracts so that the arm 20 performs the pitch operation around the axis of the support shaft 21.
- the bucket 30 has a distal end portion corresponding to the distal end portion of the work apparatus main body so that the bucket 30 can perform a first rotation operation relative to the arm 20 and a second rotation operation.
- the first rotation operation is a pitch operation and is a rotation operation around the bucket horizontal axis in a direction parallel to the width direction of the bucket 30.
- the second rotation operation is a rotation operation around an axis orthogonal to the bucket horizontal axis, and is a yaw operation described in detail later in the first embodiment.
- the bucket 30 includes a plurality of claw portions 30 a that constitute the tip portion of the bucket 30, a bottom portion 30 b, and a bucket side mounting member 30 c.
- the plurality of claw portions 30 a protrude in the same direction from the front end side edge portion of the open end of the bucket 30, that is, the front end portion of the bucket main body portion constituting the earth and sand accommodating portion of the bucket 30.
- the bucket side mounting member 30 c constitutes a base end portion of the bucket 30, that is, an end portion opposite to the plurality of claw portions 30 a, and the bucket side mounting member 30 c is interposed between the arm 20 and the arm side mounting member 33. Installed on.
- the arm-side mounting member 33 is pivotally supported on the tip of the arm 20 via a support shaft 31 so that the first rotation operation, that is, the pitch operation can be performed with respect to the arm 20. It is connected to the arm 20 via a first link arm 34A and a second link arm 34B.
- the first and second link arms 34A, 34B each have one end connected to each other via a pin 34C so as to be relatively rotatable, and the other end on the opposite side.
- the other end portion of the first link arm 34A is pivotally supported by the arm side mounting member 33, and the other end portion of the second link arm 34B is pivotally supported by the arm 20.
- the bucket cylinder 32 is a bucket hydraulic cylinder and corresponds to a first bucket actuator according to the present invention, that is, an actuator that causes the bucket 30 to perform the pitch operation relative to the arm 20.
- the bucket cylinder 32 has a head-side end (upper end in FIG. 1) and a rod-side end (lower end in FIG. 1) on the opposite side.
- a rod side end is pivotally connected to the arm 20 via a pin 23, and the rod side end is connected to one end of the first and second link arms 34A, 34B via the pin 34C. It is connected so that it can rotate.
- the bucket cylinder 32 extends and contracts so that the arm side mounting member 33 and the bucket 30 connected thereto perform the pitch operation around the axis of the support shaft 31.
- the bucket-side mounting member 30c can perform the second rotation operation, in this embodiment, the yaw operation, relative to the arm-side mounting member 33 and the arm 20, as shown in FIG. Is supported by the arm side mounting member 33 so as to be able to rotate around the yaw axis C1.
- the yaw axis C1 includes a direction orthogonal to a ground wall 30f that is a wall from the bottom 30b of the bucket 30 to the plurality of claw portions 30a at the tip (a direction substantially orthogonal to the ground wall 30f).
- the working device 4 further includes a bucket rotation motor 35 made of a hydraulic motor.
- the bucket rotation motor 35 corresponds to a second bucket actuator that causes the bucket 30 to perform the second rotation operation, that is, the yaw operation.
- the bucket rotation motor 35 has a motor main body fixed to the arm side mounting member 33 and an output shaft connected to the bucket side mounting member 30c. The motor main body operates to rotate the output shaft, thereby causing the bucket 30 including the bucket side mounting member 30c to be relative to the arm side mounting member 33 and the arm 20 connected thereto. Therefore, the yaw operation that is the second rotation operation, that is, the rotation operation around the yaw axis C1 is performed.
- the yaw actuator (second bucket actuator according to the present invention) that causes the bucket 30 to perform the second rotation operation, that is, the yaw operation relative to the arm 20, is not limited to the bucket rotation motor 35.
- the yaw actuator may be, for example, a hydraulic cylinder that rotates the bucket mounting member 30c around the yaw axis C1 via a linear motion / rotation conversion mechanism such as a clan arm.
- the yaw actuator may be an electric motor, for example.
- the construction machine 1 includes a controller 60, a proportional valve group 65, and a control valve unit 70 as shown in FIG. These function as a control device that controls the operation of the working device 4. Specifically, automatic operation of the bucket 30 for excavation work for excavating the ground or leveling work for leveling the ground flat is enabled.
- the control valve unit 70 includes direction switching valves 71, 72, 73, 74, which are provided in the hydraulic oil supply paths of the actuators of the boom cylinder 12, arm cylinder 22, bucket cylinder 32, and bucket rotation motor 35. It is provided and opens and closes so as to control the supply of hydraulic oil from a hydraulic pump (not shown) to the actuator.
- Each of the direction switching valves 71 to 74 is a pilot-operated hydraulic switching valve having a pair of pilot ports, and the pilot pressure is input by inputting a pilot pressure to one of the pair of pilot ports. It is configured to open at an opening corresponding to the magnitude of the pilot pressure in a direction corresponding to the received pilot port.
- the proportional valve group 65 includes a plurality of proportional valves 66 corresponding to the direction switching valves 71, 72, 73, 74, respectively.
- Each of the plurality of proportional valves 66 is an electromagnetic valve, and is interposed between a corresponding directional switching valve among the directional switching valves 71 to 74 and a pilot hydraulic power source (not shown), and is a command signal input from the controller 60.
- the magnitude of the pilot pressure input to the direction switching valve is changed by opening the valve at an opening corresponding to.
- the controller 60 inputs the appropriate command signal to each of the plurality of proportional valves 66 to operate the direction switching valves 71 to 74 through the plurality of proportional valves 66, whereby the boom cylinder 12, The operation of the arm cylinder 22, the bucket cylinder 32, and the bucket rotation motor 35 is controlled.
- each of the direction switching valves 71, 72, 73, 74 has a pair of pilot ports
- the plurality of proportional valves 66 are provided in each of the pair of pilot ports of the direction switching valves 71, 72, 73, 74. It has been.
- the control valve unit 70 includes a direction switching valve connected to a hydraulic motor that causes the traveling body 2 to perform a traveling operation, and a hydraulic motor that causes the revolving body 3 to perform a turning operation.
- a directional control valve connected to can also be included.
- the proportional valve group 65 may include a proportional valve for controlling the pilot pressure of the direction switching valve connected to each of the hydraulic motors.
- the construction machine 1 includes a GNSS receiver 50 (GNNS: Global Navigation Satellite System) for detecting the location of the construction machine 1, and a plurality of attitude sensors 51 for detecting the attitude state of the work device 4. , An inclination sensor 52 for detecting the inclination angle of the swing body 3 (airframe), and operation states of a plurality of hydraulic actuators including the boom cylinder 12, the arm cylinder 22, the bucket cylinder 32, and the bucket rotation motor 35, respectively.
- GNSS Global Navigation Satellite System
- autopilot switch 55 for, further comprising a.
- the plurality of posture sensors 51 detect a pitch angle, which is a rotation angle in the direction of the pitch operation of the boom 10 with respect to the revolving structure 3 (the direction of rotation around the axis of the support shaft 11), for example.
- a sensor an angle sensor that detects a pitch angle that is a rotation angle of the arm 20 with respect to the boom 10 (a direction of rotation around the axis of the support shaft 21), a pitch angle ⁇ p of the bucket 30 with respect to the arm 20, That is, an angle sensor that detects the rotation angle in the pitch direction that is the direction of the pitch operation of the bucket 30 (the direction of rotation around the axis of the support shaft 31), and the yaw angle ⁇ y of the bucket 30 relative to the arm 20, that is, the bucket And an angle sensor for detecting a rotation angle in the yaw direction that is a direction of 30 yaw operations (direction of the first rotation operation around the yaw axis C1).
- Each of the plurality of angle sensors can be configured by,
- the plurality of attitude sensors 51 are not limited to a plurality of angle sensors that detect the pitch angles of the boom 10, the arm 20, and the bucket 30.
- the plurality of posture sensors 51 may include, for example, a plurality of stroke sensors that respectively detect stroke displacement amounts of the boom cylinder 12, the arm cylinder 22, and the bucket cylinder 32.
- the tilt sensor 52 includes, for example, an inertial sensor having functions of an acceleration sensor and an angular velocity sensor. Based on the detection signal of the inertial sensor, the tilt angle of the revolving structure 3 can be specified by a strap-down method or the like.
- the plurality of actuator operation sensors 53 include, for example, a plurality of pilot pressure sensors.
- the plurality of pilot pressure sensors are configured by pressure sensors that detect pilot pressures applied to the pair of pilot ports of the direction switching valves 71, 72, 73, 74, respectively.
- the bucket operation setting operation unit 54 and the autopilot switch 55 are disposed in the cab 3a.
- the bucket operation setting operation unit 54 is configured to receive a plurality of setting operations during excavation work or leveling work.
- the plurality of setting operations include, for example, vibrations in the yaw direction of the bucket 30 (operations that rotate periodically by a predetermined angle in the normal rotation direction and the reverse rotation direction around the yaw axis C1, that is, the second rotation operation) Including the necessity of the yaw vibration, the period Ty (or frequency) of the yaw vibration, and the amplitude Ay of the yaw vibration (maximum rotation angle in the forward direction and the reverse direction).
- the yaw vibration period Ty (or frequency) and the yaw vibration amplitude Ay can each be set within a predetermined range.
- the bucket operation setting operation unit 54 may receive not only operations for setting related to the operation of the bucket 30 but also various setting operations related to the construction machine 1 other than that. Moreover, the bucket operation setting operation device 54 and the automatic pilot switch 55 may be configured integrally with each other.
- the controller 60 includes an electronic circuit unit including a microcomputer, a memory, an interface circuit, and the like.
- the controller 60 is generated by each of the GNSS signal (the detection signal of the existence position of the construction machine 1) received by the GNSS receiver 50, the attitude sensor 51, the inclination sensor 52, and the actuator operation sensor 53. And the operation signal generated by each of the bucket operation setting operation device 54 and the autopilot switch 55 are input.
- three-dimensional map data is stored in advance or downloaded from an external server or the like.
- the map data includes information regarding the actual landform of the work site where the work is performed by the construction machine 1 and information regarding the target landform to be realized by the work.
- the controller 60 operates the direction switching valves 71 to 74 by generating an appropriate command signal for each of the plurality of proportional valves 66 during excavation work or leveling work and inputting it to the proportional valve 66. Therefore, the operation of the boom cylinder 12, the arm cylinder 22, the bucket cylinder 32, and the bucket rotation motor 35 is controlled.
- This function is realized by at least one of a hardware configuration and a program (software configuration) installed in the controller 60.
- excavation work or leveling work can be performed by the bucket 30 while causing the bucket 30 to vibrate due to the second rotation operation, that is, the yaw vibration.
- the excavation work is performed as follows, for example.
- the operator of the construction machine 1 gives an operation to set the cycle (or frequency) and amplitude of the yaw vibration of the bucket 30 to the bucket operation setting operator 54, and further indicates that the yaw vibration should be executed.
- An operation for setting (operation for turning on yaw vibration) is given.
- the driver moves the construction machine 1 to a predetermined work place by giving an appropriate traveling operation to a traveling operation lever (not shown). Then, by giving an appropriate work operation to a work operation lever (not shown) for moving the work device 4 at the work place, the boom 10 and the arm 20 are moved to move the bucket 30 to the start position of the excavation work.
- the driver gives an ON operation to the autopilot switch 55, and further performs a predetermined operation on a predetermined operation lever (for example, an arm operation lever for moving the arm 20) for starting the actual movement of the bucket 30.
- a predetermined operation lever for example, an arm operation lever for moving the arm 20
- the controller 60 detects the current position of the construction machine 1 grasped from the GNSS signal inputted from the GNSS receiver 50 and the inclination of the revolving structure 3 grasped from the detection signal inputted from the inclination sensor 52.
- the angle and the work information stored in advance that is, information on the actual topography of the work site and information on the target topography by the excavation work (information on the position and orientation of the target construction surface St indicated by a two-dot chain line in FIG. 2);
- the target movement path of the bucket 30 is determined, and the trajectory (time series pattern) of the target posture with respect to the pitch direction of the boom 10, the arm 20, and the bucket 30 for realizing the target movement path is determined.
- the target posture of the bucket 30 is, for example, a wall surface from the bottom 30b of the bucket 30 to the claw 30a as shown in FIG. 2 after the claw 30a of the bucket 30 is bitten into the ground.
- the ground wall surface 30f (or the tip of the claw portion 30a) is determined so as to be along the target construction surface St.
- the controller 60 causes the yaw angle (the yaw axis C1) of the bucket 30 to vibrate the bucket 30 with the period and amplitude set by the operation given to the bucket operation setting operation unit 54.
- the target waveform pattern of the rotation angle around ⁇ ) (the pattern of the change over time of the target value of the yaw angle ⁇ y) is determined.
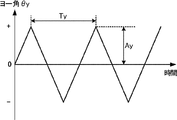
- the target waveform pattern is set to, for example, a triangular waveform pattern illustrated in FIG.
- the target waveform pattern is not limited to a triangular wave pattern, and may be a smooth curved pattern such as a sine wave pattern.
- the yaw angle ⁇ y of the bucket 30 shown in FIG. 4 is such that the width direction of the bucket 30 (the direction in which the claw portions 30a are arranged in this embodiment) is the first rotation operation of the bucket 30, that is, the pitch operation. So that it becomes zero in a state (standard posture state in the yaw direction of the bucket 30) that coincides with or substantially coincides with the direction of the bucket horizontal axis (in this embodiment, the axis of the support shaft 31). Is set.
- the controller 60 causes the actual postures in the pitch directions of the boom 10, the arm 20, and the bucket 30 that are grasped by the detection signals of the plurality of posture sensors 51 to follow the target posture.
- an appropriate command signal is input to a plurality of proportional valves 66 corresponding to each of the direction switching valves 71 to 73 to operate the pilot pressure applied to the direction switching valves 71 to 73.
- the controller 60 is proportional to the direction switching valve 74 so that the yaw angle ⁇ y of the bucket 30 grasped by the detection signals of the plurality of posture sensors 51 changes according to a preset target waveform pattern.
- An appropriate command signal is input to the valve 66 to control the pilot pressure applied to the direction switching valve 74.
- the actual yaw angle ⁇ y of the bucket 30 changes so as to follow the target waveform pattern. That is, as shown in FIG. 5, yaw vibration of the bucket 30 is realized such that the actual yaw angle of the bucket 30 alternately changes in the forward direction and the reverse direction with a constant amplitude and period.
- the bucket rotation motor 35 for causing the bucket 30 to yaw vibrate may be relatively small. Therefore, the bucket 30 can be yaw-oscillated with a relatively short period. This makes it possible to increase the number of repetitions of the yaw operation per unit movement amount of the bucket 30 during excavation work, so that the bucket 30 is in pressure contact with the ground, specifically the plurality of claws. It is possible to effectively reduce the resistance that the bucket 30 receives when the bucket 30 moves in a state where the portion 30a has digged into the ground.
- the target construction is performed while the bucket 30 is yaw-vibrated in a state where at least one of the grounding wall surface 30f of the bucket 30 and the respective leading end portions of the plurality of claw portions 30a is constantly along the target construction surface St.
- a smooth construction surface can be formed by moving along the surface St.
- the leveling work is performed as follows, for example.
- the operator of the construction machine 1 performs an operation for setting the cycle Ty (or frequency) and the amplitude Ay of the yaw vibration of the bucket 30 with respect to the bucket operation setting operator 54, and Gives an operation to turn on yaw vibration.
- the driver gives an appropriate traveling operation to the traveling operation lever to move the construction machine 1 to a predetermined working place, and the driver operates as an operating lever for operating the work device 4 at the working place.
- the boom 10 and the arm 20 which are the work device main bodies are moved to move the bucket 30 to the start position of the leveling work.
- the driver gives an ON operation to the autopilot switch 55, and further gives a predetermined operation to a predetermined operation lever (for example, the arm operation lever) for starting the actual movement of the bucket 30.
- a predetermined operation lever for example, the arm operation lever
- the controller 60 determines the target movement path of the bucket 30 as in the case of excavation work, and further each of the boom 10, the arm 20 and the bucket 30 for realizing the target movement path.
- the trajectory (time series pattern) of the target posture in the pitch direction is determined.
- the target moving path and the target posture of the bucket 30 are such that the ground wall surface 30f that is a wall surface from the bottom 30b of the bucket 30 to the plurality of claws 30a is the target construction surface (target ground surface). (Surface) It is determined along St.
- the controller 60 yaws the bucket 30 so as to vibrate the bucket 30 with the period and amplitude set by the operation given to the bucket operation setting operation unit 54.
- a target waveform pattern of the angle ⁇ y is determined.
- the controller 60 controls the direction switching valves 71 to 73 so that the actual postures in the pitch directions of the boom 10, the arm 20, and the bucket 30 follow the target posture.
- Appropriate command signals are input to the proportional valves 66 corresponding to each of them to control the operations of the boom cylinder 12, the arm cylinder 22 and the bucket cylinder 32.
- the controller 60 appropriately controls the proportional valve 66 corresponding to the direction switching valve 74 so as to change the actual yaw angle ⁇ y of the bucket 30 with the target waveform pattern.
- a command signal is input to control the operation of the bucket rotation motor 35, thereby causing the bucket 30 to perform yaw vibration corresponding to the target waveform pattern.
- the bucket 30 can be yaw-oscillated with a relatively short cycle, so that the bucket 30 is in pressure contact with the ground, specifically, the ground wall 30f
- the resistance received when the bucket 30 moves along the target movement path in a state where the bucket 30 is pressed against the ground can be effectively reduced.
- At least one of the grounding wall surface 30f of the bucket 30 and the tips of the plurality of claw portions 30a is steadily aligned with the target construction surface St, and the bucket 30 is yaw-oscillated while moving along the target movement path.
- a smooth construction surface can be formed by moving along.
- the bucket 30 according to the second embodiment has a plurality of claw portions 30 a and a bucket-side attachment member 30 c, and the arm 20, as in the first embodiment.
- the arm 20 is attached to the tip of the arm 20 so that the pitch operation and the tilt operation can be relatively performed.
- the tilting operation is performed around the tilt axis C2 extending in a direction (including a direction substantially coincident) parallel to the extending direction of the plurality of claw portions 30a in the bucket 30, that is, the protruding direction of the plurality of claw portions 30a. This is a rotating operation.
- the tilt axis C2 is preferably located immediately above the bucket 30 when viewed from the direction along the tilt axis C2, as shown in FIG.
- the tilt axis C2 according to the second embodiment is a direction parallel to the ground wall 30f (including a substantially parallel direction) and a direction orthogonal to the bucket horizontal axis (almost substantially). Including the orthogonal direction). Therefore, the “tilt operation” according to the second embodiment corresponds to a rotation operation around an axis perpendicular to the bucket horizontal axis, that is, a second rotation operation according to the present invention.
- the bucket side mounting member 30c has a flat plate-like main body, and a rotating shaft 30d is fixed to the main body.
- the rotating shaft 30d is fixed to the bucket side mounting member 30c in a posture extending in a direction parallel to the main body of the bucket side mounting member 30c, and the axis of the rotating shaft 30d matches the tilt axis C2.
- the arm side attaching member 33 is attached to the arm 20 so as to enable the pitch operation, that is, the turning operation of the turning body 3 around the left and right axis. 33, both ends of the rotating shaft 30d are supported by bearings 33a and 33b so as to be rotatable around the axis thereof, that is, around the tilt axis C2.
- the construction machine 1 includes a tilt actuator for causing the bucket 30 to perform the tilt operation, that is, a second bucket actuator for causing the bucket 30 to perform a second rotation operation.
- a pair of left and right bucket tilt cylinders 36 each of which is a hydraulic cylinder, is provided.
- the pair of left and right bucket tilt cylinders 36 are interposed between the left and right side surfaces of the bucket 30 and the arm side mounting member 33.
- the pair of bucket tilt cylinders 36 includes a rod side end portion (a lower end portion in the posture shown in FIG. 7) connected to the left and right side surfaces of the bucket 30 and the arm side attachment.
- a head-side end portion connected to the member 33 (an upper end portion in the posture shown in FIG. 7).
- the head side end portion is an end portion on the opposite side of the rod of both ends of the cylinder body of the bucket tilt cylinder 36, and the tilt axis C2 is attached to the bracket 33c fixed to the arm side attaching member 33.
- the rod side end is a tip of the rod, and is connected to brackets 30e fixed to the left and right side surfaces of the bucket 30 so as to be swingable around an axis in a direction parallel to the tilt axis C2. Yes.
- the bucket 30 according to the second embodiment performs the first rotation operation, that is, the pitch operation around the axis of the support shaft 31 corresponding to the expansion / contraction operation of the bucket cylinder 32 as in the first embodiment.
- the second rotation operation around the tilt axis C2 corresponding to the expansion / contraction operation of the bucket tilt cylinder 36 specifically, the expansion operation of one bucket tilt cylinder 36 and the contraction operation of the other bucket tilt cylinder 36. That is, a tilt operation is performed.
- the tilt actuator that rotates the bucket 30 in the tilt direction is not limited to the pair of bucket tilt cylinders 36.
- the tilt actuator may be, for example, a hydraulic motor or an electric motor that is connected to the rotation shaft 30d and rotates the bucket 30 about the tilt axis C2 by rotating the rotation shaft 30d.
- the construction machine 1 includes a controller 60, a proportional valve group 65, and a control valve unit 70 as shown in FIG.
- a pilot operated direction switching valve 75 connected to the pair of bucket tilt cylinders 36 is included
- the proportional valve group 65 includes a proportional valve 66 connected to a pair of pilot ports of the direction switching valve 75 instead of the proportional valve 66 connected to the pair of pilot ports of the direction switching valve 74 in the first embodiment.
- the construction machine 1 according to the second embodiment includes a plurality of posture sensors 51 as in the first embodiment, and the plurality of posture sensors 51 are the buckets 30 in the first embodiment.
- the angle sensor detects the tilt angle ⁇ t that is the rotation angle of the bucket 30 in the tilt direction, that is, the rotation angle around the tilt axis C2.
- the construction machine 1 includes a bucket operation setting operation device 54 as in the first embodiment.
- the bucket operation setting operation device 54 is configured to perform the bucket operation during excavation work by the construction machine 1.
- the necessity of tilt vibration which is 30 vibrations in the tilt direction (operation that rotates periodically by a predetermined angle in the forward direction and reverse direction around the tilt axis C2, that is, vibration by the second rotation operation)
- the tilt vibration period Tt (or frequency) and the tilt vibration amplitude At are set to receive an operation.
- the period Tt (or frequency) and amplitude At of the tilt vibration can be set within predetermined ranges.
- excavation work can be performed by the bucket 30 while causing the bucket 30 to vibrate by the second rotation operation, that is, the tilt vibration.
- the excavation work is performed as follows, for example.
- the operator of the construction machine 1 gives an operation for setting the cycle (or frequency) and amplitude of the tilt vibration of the bucket 30 to the bucket operation setting operator 54, and further sets that the tilt vibration should be executed. Operation (tilting vibration ON operation) is given.
- the driver moves the construction machine 1 to a predetermined work place by giving an appropriate traveling operation to a traveling operation lever (not shown). Then, by giving an appropriate work operation to a work operation lever (not shown) for moving the work device 4 at the work place, the boom 10 and the arm 20 are moved to move the bucket 30 to the start position of the excavation work.
- the driver gives an ON operation to the autopilot switch 55, and further gives a predetermined operation to a predetermined operation lever (for example, the arm operation lever) for starting the actual movement of the bucket 30.
- a predetermined operation lever for example, the arm operation lever
- the controller 60 determines the target movement path of the bucket 30 and, in addition to the boom 10, the arm 20, and the like for realizing the target movement path, similarly to the controller 60 according to the first embodiment. And the trajectory (time series pattern) of the target posture in the pitch direction of the bucket 30 is determined.
- the target movement path and target posture of the bucket 30 are shown in FIG. 10, for example, with the amplitude set by the bucket operation setting operation unit 54 after the claw portion 30a of the bucket 30 is bitten into the ground.
- the tilting operation is performed to the maximum angle in each of the forward rotation direction and the reverse rotation direction (that is, when rotating around the tilt axis C2)
- the lowest of the plurality of claw portions 30a of the bucket 30 is shown.
- claw part 30a is determined so that the target construction surface St shown with a dashed-two dotted line in FIG.
- the controller 60 tilts the bucket 30 with a period and amplitude set by the operation given to the bucket operation setting operation unit 54 (tilt axis C2 around the tilt axis C2).
- a target waveform pattern (rotation angle) ⁇ t (a change pattern of the target value of the tilt angle ⁇ t with time) is determined.
- the target waveform pattern is set to, for example, a triangular waveform pattern illustrated in FIG.
- the target waveform pattern is not limited to a triangular wave pattern, and may be a smooth curved pattern such as a sine wave pattern.
- the bucket 30 shown in FIG. 9 has a tilt angle ⁇ t in which the width direction of the bucket 30 (the direction in which the plurality of claw portions 30a are arranged) is the axis of the first rotation operation, that is, the pitch operation of the bucket 30. It is set to be zero in a state that coincides with or substantially coincides with the direction of the horizontal axis (in this embodiment, the axis of the support shaft 31) (standard posture state in the tilt direction of the bucket 30).
- the controller 60 causes the actual postures in the pitch directions of the boom 10, the arm 20, and the bucket 30 to follow the target posture.
- the operation of the boom cylinder 12, the arm cylinder 22 and the bucket cylinder 32 is controlled by inputting appropriate command signals to the plurality of proportional valves 66 corresponding to the direction switching valves 71 to 73, respectively.
- the controller 60 controls the direction switching valve 75 so that the actual tilt angle ⁇ t of the bucket 30 grasped by the detection signals of the plurality of posture sensors 51 changes according to a preset target waveform pattern.
- An appropriate command signal is input to the corresponding proportional valve 66 to operate the pilot pressure applied to the direction switching valve 75.
- the actual tilt angle ⁇ t of the bucket 30 changes so as to follow the target waveform pattern. That is, as shown in FIG. 10, the actual tilt angle ⁇ t of the bucket 30, that is, the rotation angle around the tilt axis C2, is changed alternately with a constant amplitude At and a period Tt in the forward rotation direction and the reverse rotation direction.
- the second rotation operation tilt operation is performed by the bucket 30.
- excavation work on the ground is performed such that the bucket 30 is moved along the target movement path while tilting the bucket 30.
- the pair of bucket tilt cylinders 36 for tilting the bucket 30 may be relatively small. Therefore, the bucket 30 can be tilted with a relatively short period. This makes it possible to increase the number of repetitions of the tilting operation per unit movement amount of the bucket 30 during excavation work. Thereby, the resistance which the bucket 30 receives at the time of the movement in the state which the nail
- the tilt vibration of the bucket 30, that is, the vibration caused by the rotation operation around the tilt axis C2 in the direction parallel to the extending direction of the plurality of claw portions 30a, changes the direction of the plurality of claw portions 30a of the bucket 30. Therefore, the direction of the plurality of claw portions 30a can always be maintained in a direction parallel to the moving direction of the bucket 30, regardless of the tilt vibration. This makes it possible to ensure the smoothness of the construction surface realized by excavation work.
- the lowermost claw portion 30a among the plurality of claw portions 30a is the target.
- the present invention is not limited to the embodiment described above.
- the present invention includes the following aspects, for example.
- the yaw vibration and tilt vibration of the bucket 30 are performed during excavation work and leveling work by automatic piloting, but the mode of excavation work and leveling work in the present invention is not limited.
- the yaw vibration or tilt vibration of the bucket 30 may be executed by operating a predetermined operation button when the driver performs excavation work or leveling work by manual operation.
- the bucket 30 can rotate only in one of the yaw direction and the tilt direction, but the present invention is not limited to this.
- the bucket according to the present invention may be attached to the distal end portion of the working apparatus body (for example, the distal end portion of the arm 20) so as to be able to rotate in both the yaw direction and the tilt direction.
- both the amplitude and period of the yaw vibration or tilt vibration of the bucket 30 are variable and can be set by the driver, but the present invention is not limited to this. Absent. For example, only one of the amplitude and period may be variable, or both the amplitude and period may be fixed to a constant value.
- the construction machine according to the present invention is not limited to a crawler hydraulic excavator as shown in FIG.
- the construction machine according to the present invention may be, for example, a wheel type excavator.
- the construction machine according to the present invention may not include a revolving body that can revolve with respect to the traveling body.
- the work device main body for example, the boom 10) may be capable of performing a yaw operation that is rotation about a vertical axis and / or a slide operation that is parallel to the width direction of the revolving structure 3. .
- the construction machine includes a machine body, a work device mounted on the machine body, and a control device that controls the operation of the work device.
- the work device includes a work device body having a base end portion connected to the machine body and a tip portion opposite to the base end portion, and a first rotation operation relative to the tip portion of the tip portion of the work device. And a bucket attached to the working device so as to be able to perform the second rotation operation, and a plurality of bucket actuators that move the bucket relative to the working device main body.
- the first rotation operation is a pitch operation that is a rotation operation around the bucket horizontal axis in a direction parallel to the width direction of the bucket
- the second rotation operation is an axis rotation in a direction orthogonal to the bucket horizontal axis. This is a rotating operation.
- the plurality of bucket actuators include a first bucket actuator that causes the bucket to perform the first rotation operation, and a second bucket actuator that causes the bucket to perform the second rotation operation.
- the control device is configured to control the second bucket actuator so as to periodically vibrate the bucket by the second rotation operation in a state where the bucket is in pressure contact with the ground.
- the second bucket actuator for causing the bucket to perform a second rotation operation causes the bucket to perform a first rotation operation that is a pitch operation. Therefore, the bucket may be smaller than the first actuator. Therefore, the second pivoting motion (for example, yaw motion or tilt motion) of the bucket can be quickly performed in a relatively short cycle.
- the bucket is in pressure contact with the ground (for example, during excavation work or leveling work)
- the bucket is periodically vibrated by the second rotation operation to effectively reduce the resistance that the bucket receives from the ground. Enable.
- the bucket is a bottom part, a plurality of claw parts protruding in the same direction at the tip of the bucket, a wall surface from the bottom part to the plurality of claw parts, and a grounding wall surface that can contact a construction surface
- the second rotation operation is preferably a yaw operation that is a rotation operation about an axis in a direction orthogonal to the ground wall surface. That is, it is preferable that the control device is configured to control the second bucket actuator so as to vibrate the bucket in a yaw direction that is a direction of the yaw operation.
- the control device is configured such that at least one of the grounding wall surface and the tip portions of the plurality of claw portions is a target construction surface during excavation work for excavating the ground by the bucket It is preferable that the operation of the working device is controlled so as to move the bucket along the direction. This makes it possible to accurately match the construction surface realized by excavation work with the target construction surface.
- the control device periodically vibrates the bucket in the yaw direction, which is the direction of the yaw operation, during leveling work for leveling the ground by moving the bucket with the ground wall pressed against the ground.
- the second bucket actuator is configured to control the operation.
- the grounding wall surface of the bucket can be maintained in a substantially constant posture, so that the ground can be leveled smoothly.
- control device is configured to control the operation of the working device so that the bucket moves the grounding wall surface of the bucket along a target construction surface during the leveling work. This control makes it possible to accurately match the construction surface realized by the leveling work with the target construction surface.
- the bucket is a bottom part, a plurality of claw parts protruding in the same direction at the tip of the bucket, a wall surface from the bottom part to the plurality of claw parts, and a grounding wall surface that can contact a construction surface
- the second rotation operation may be a tilt operation that is a rotation operation around an axis in a direction in which the plurality of claw portions protrude. That is, the control device may be configured to control the second bucket actuator so as to vibrate the bucket in the tilting direction.
- the protruding direction of the plurality of claw portions can be maintained substantially in the same direction as the moving direction of the bucket (excavation direction). This makes it possible to move the bucket while suppressing the occurrence of waviness, etc. on the construction surface, thereby making it possible to form a smooth construction surface while reducing the resistance that the bucket receives from the ground during the movement.
- the control device is configured to perform a maximum rotation amount in vibration in the direction of the tilting operation of the bucket during excavation work for excavating the ground by the bucket. Only when the bucket is rotated in the direction of the tilt operation, the bucket is moved so that the lowermost claw portion of the plurality of claw portions of the bucket follows the target construction surface. It is preferable to be configured to control the operation of the work device. This control can prevent the construction surface realized by the excavation work from becoming a construction surface deeper than the target construction surface due to the tilting operation.
- control device is configured to be able to change at least one of a vibration period and an amplitude of the bucket. It is possible to set to a value suitable for the state of.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Operation Control Of Excavators (AREA)
Abstract
作業時にバケットが地面から受ける抵抗を軽減すると共に、施工面の滑らかさを向上することができる建設機械が提供される。建設機械は、作業装置本体及びバケット(30)を有する作業装置(4)と、バケット(30)を回動させる第1及び第2バケットアクチュエータ(32,35)と、制御装置と、を備える。第2バケットアクチュエータ(35)は、作業装置本体に対してバケット横軸に直交する軸心(C1)周りのヨー動作をバケット(30)に行わせる。制御装置は、掘削作業時又は整地作業時に、バケット(30)をヨー動作の方向に振動させるように第2アクチュエータ(35)を制御する。
Description
本発明は、油圧ショベル等の建設機械に関する。
従来、例えば特許文献1,2に見られるように、ブーム、アーム及びバケットを備える建設機械において、掘削作業時に、バケットを振動させるようにブームシリンダ、アームシリンダ及びバケットシリンダのいずれかの油圧シリンダを作動させ、これにより掘削抵抗(地面内部に進入するバケットが当該地面から受ける抵抗)を低減する技術が知られている。
しかし、前記のようなブームシリンダ、アームシリンダ及びバケットシリンダは、通常、比較的大きな容量を有する油圧シリンダであるため、前記バケットを素早く(すなわち短い周期で)振動させることが難しい。
また、ブームシリンダ、アームシリンダ及びバケットシリンダのそれぞれは、通常、ブーム、アーム、バケットのそれぞれをピッチ方向に回動させるものであるため、これらの油圧シリンダの作動制御によるバケットの振動は、ピッチ方向の回転振動であり、掘削作業により形成される施工面にうねりや凹凸を発生させやすい。
また、例えば地面を平滑化する整地作業時において、バケットの移動抵抗を軽減するためにブームシリンダ、アームシリンダ及びバケットシリンダのいずれかの作動制御によってバケットを振動させると、地面を滑らかに平滑化することが困難となる。
本発明は、地面から受けるバケットの抵抗を軽減し、かつ施工面の滑らかさを向上することができる建設機械を提供することを目的とする。
提供されるのは、建設機械であって、機体と、当該機体に搭載される作業装置と、前記作業装置の動作を制御する制御装置と、を備え、前記作業装置は、前記機体に連結される基端部及びその反対側の先端部を有する作業装置本体と、前記作業装置の前記先端部に当該先端部に対して相対的に第1回動動作と第2回動動作とを行い得るように前記作業装置に取付けられたバケットと、前記バケットを前記作業装置本体に対して相対的に動かす複数のバケットアクチュエータと、を有し、前記第1回動動作は前記バケットの幅方向と平行な方向のバケット横軸周りの回動動作であるピッチ動作であり、前記第2回動動作は前記バケット横軸と直交する方向の軸回りの回動動作であり、前記複数のバケットアクチュエータは、前記バケットに前記第1回動動作を行わせる第1バケットアクチュエータと、前記バケットに前記第2回動動作を行わせる第2バケットアクチュエータと、を含み、前記制御装置は、前記バケットが地面に圧接した状態で前記バケットを前記第2回動動作によって周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている。
本発明の第1実施形態を図1~図6を参照して以下に説明する。図1は、本実施形態の建設機械1を示す。この建設機械1は、例えば、油圧ショベルである。この建設機械1は、クローラ式の走行体2と、走行体2上に旋回可能に搭載された機体としての旋回体3と、旋回体3に取付けられた作業装置4と、を備える。走行体2の走行動作と旋回体3の旋回動作とはそれぞれ図示を省略する油圧モータにより駆動される。
旋回体3は、その前部に位置する運転室3aと、後部に位置する機械室3bと、を備える。機械室3bには、図示を省略するエンジンや、種々の油圧機器(油圧ポンプ、方向切換弁等)が格納されている。
作業装置4は、ブーム10と、アーム20と、バケット30と、複数の油圧シリンダと、を有する。この実施形態において前記ブーム10及び前記アーム20は作業装置本体を構成する。前記ブーム10は基端部とその反対側の先端部とを有する。前記基端部は、前記作業装置本体の基端部に相当し、前記ブーム10が旋回体3の適所、例えば運転室3aの側方の箇所、から延びるような姿勢で当該ブーム10の前記基端部が前記旋回体3に連結される。前記アーム20は、当該アーム20がブーム10の先端部からさらに延びるような姿勢で当該ブーム10の先端部に連結される基端部と、その反対側の先端部と、を有する。前記バケット30は、前記作業装置本体の先端部である前記アーム20の先端部に取付けられる。前記複数の油圧シリンダは、ブームシリンダ12と、アームシリンダ22と、バケットシリンダ32と、を含む。
前記ブーム10は、前記旋回体3に対して相対的にピッチ動作をし得るように支軸11を介して前記旋回体3に軸支されている。前記ピッチ動作は、この実施の形態では、前記旋回体3の左右方向の軸周りの回動動作である。前記ブーム10は、ブーム用油圧シリンダである前記ブームシリンダ12を介して旋回体3に連結されている。該ブームシリンダ12は、前記ブーム10に前記支軸11の軸心周りの回動動作すなわち前記ピッチ動作を行わせるように、伸縮する。
前記アーム20は、前記ブーム10に対して相対的に前記ピッチ動作すなわち前記旋回体3の左右方向の軸周りの回動動作をし得るように支軸21を介して前記ブーム10の先端部に軸支されている。前記アーム20は、アーム用油圧シリンダである前記アームシリンダ22を介してブーム10に連結されている。該アームシリンダ22は、前記アーム20に前記支軸21の軸心周りの前記ピッチ動作を行わせるように伸縮する。
前記バケット30は、前記アーム20に対して相対的に第1回動動作をし、且つ、第2回動動作をし得るように、作業装置本体の先端部に相当する前記アーム20の先端部に取付けられている。前記第1回動動作は、ピッチ動作であり、前記バケット30の幅方向と平行な方向のバケット横軸回りの回動動作である。前記第2回動動作は、前記バケット横軸と直交する方向の軸回りの回動動作であって、この第1の実施形態では後に詳述するようなヨー動作である。
図2に示すように、前記バケット30は、当該バケット30の先端部を構成する複数の爪部30aと、底部30bと、バケット側取付け部材30cと、を有する。前記複数の爪部30aは、前記バケット30の開口端の先端側縁部、すなわち当該バケット30のうち土砂の収容部を構成するバケット本体部分の先端部、から互いに同じ向きに突出する。前記バケット側取付け部材30cは、前記バケット30の基端部すなわち前記複数の爪部30aと反対側の端部を構成し、該バケット側取付け部材30cがアーム側取付け部材33を介して前記アーム20に取付けられている。
前記アーム側取付け部材33は、前記アーム20に対して前記第1回動動作すなわち前記ピッチ動作をし得るように支軸31を介して前記アーム20の先端部に軸支されていると共に、第1リンクアーム34A及び第2リンクアーム34Bを介して前記アーム20に連結されている。前記第1及び第2リンクアーム34A,34Bはピン34Cを介して互いに相対回動可能に連結される一方の端部と、その反対側の他方の端部と、をそれぞれ有する。前記第1リンクアーム34Aの前記他方の端部は前記アーム側取付け部材33に軸支され、前記第2リンクアーム34Bの他方の端部は前記アーム20に軸支されている。
前記バケットシリンダ32は、バケット用油圧シリンダであって、本発明にいう第1バケットアクチュエータ、すなわち、前記バケット30を前記アーム20に対して相対的に前記ピッチ動作を行わせるアクチュエータ、に相当する。具体的に、前記バケットシリンダ32は、へッド側端部(図1では上側端部)とその反対側のロッド側端部(図1では下側端部)とを有し、前記へッド側端部がピン23を介して前記アーム20に回動可能に連結され、前記ロッド側端部が前記ピン34Cを介して前記第1及び第2リンクアーム34A,34Bの一方の端部に回動可能に連結されている。該バケットシリンダ32は、前記アーム側取付け部材33及びこれに連結される前記バケット30に前記支軸31の軸心周りの前記ピッチ動作を行わせるように、伸縮する。
前記バケット側取付け部材30cは、前記アーム側取付け部材33及び前記アーム20に対して相対的に前記第2回動動作、この実施形態ではヨー動作、をし得るように、具体的には図2に示されるヨー軸心C1の周りの回動動作をし得るように、該アーム側取付け部材33に支持されている。前記ヨー軸心C1は、前記バケット30の底部30bから先端の前記複数の爪部30aに至るまでの壁面である接地壁面30fに直交する方向(当該接地壁面30fに対してほぼ直交する方向を含む。)の軸心、つまり前記接地壁面30fの法線方向と平行な方向の軸心(当該法線方向に対してほぼ平行な方向を含む。)であって、前記アーム側取付け部材33の前記第1回動動作の軸心である支軸31の軸心、つまり前記バケット横軸、と直交する方向(ほぼ直交する方向も含む。)の軸心である。
前記作業装置4は、油圧モータからなるバケット回動モータ35をさらに備える。前記バケット回動モータ35は、前記バケット30に前記第2回動動作すなわちヨー動作を行わせる第2バケットアクチュエータに相当する。当該バケット回動モータ35は、前記アーム側取付け部材33に固定されるモータ本体と、前記バケット側取付け部材30cに連結される出力軸と、を有する。前記モータ本体は、前記出力軸を回転させるように作動することにより、前記バケット側取付け部材30cを含む前記バケット30を前記アーム側取付け部材33及びこれに連結されている前記アーム20に対して相対的に前記第2回動動作すなわち前記ヨー軸心C1の周りの回動動作である前記ヨー動作を行わせる。
前記バケット30に前記アーム20に対する相対的な前記第2回動動作すなわちヨー動作を行わせるヨーアクチュエータ(本発明にいう第2バケットアクチュエータ)は、前記バケット回動モータ35に限定されない。該ヨーアクチュエータは、例えば、クランアーム等の直動/回動変換機構を介して前記バケット取付け部材30cを前記ヨー軸心C1の周りに回動させる油圧シリンダであってもよい。あるいは、該ヨーアクチュエータは、例えば電動モータであってもよい。
前記建設機械1は、図3に示すようなコントローラ60、比例弁群65、及びコントロールバルブユニット70を具備する。これらは、前記作業装置4の動作を制御する制御装置として機能する。具体的には、地面を掘削する掘削作業、又は、地面を平らに整地する整地作業のための前記バケット30の自動操縦を可能にする。
前記コントロールバルブユニット70は、方向切換弁71,72,73,74を含み、これらは前記ブームシリンダ12、アームシリンダ22、バケットシリンダ32及びバケット回動モータ35のそれぞれのアクチュエータの作動油供給路に設けられて当該アクチュエータへの図略の油圧ポンプからの作動油の供給を制御するように開閉作動する。前記方向切換弁71~74のそれぞれは、一対のパイロットポートを有するパイロット操作式の油圧切換弁であり、前記一対のパイロットポートのいずれかにパイロット圧が入力されることによりそのパイロット圧の入力を受けたパイロットポートに対応する方向にそのパイロット圧の大きさに対応した開度で開くように構成されている。
前記比例弁群65は前記方向切換弁71,72,73,74にそれぞれ対応する複数の比例弁66を含む。当該複数の比例弁66のそれぞれは電磁弁からなり、前記方向切換弁71~74のうち対応する方向切換弁と図示されないパイロット油圧源との間に介在し、前記コントローラ60から入力される指令信号に応じた開度で開くことにより当該方向切換弁に入力されるパイロット圧の大きさを変化させる。
前記コントローラ60は、前記複数の比例弁66のそれぞれに適当な前記指令信号を入力することにより当該複数の比例弁66を通じて前記方向切換弁71~74を操作し、これにより前記ブームシリンダ12、前記アームシリンダ22、前記バケットシリンダ32及び前記バケット回動モータ35の作動を制御する。
前記方向切換弁71,72,73,74のそれぞれが一対のパイロットポートを有するので、前記複数の比例弁66は前記方向切換弁71,72,73,74のそれぞれの前記一対のパイロットポートに設けられている。前記コントロールバルブユニット70は、前記方向切換弁71~74に加え、前記走行体2に走行動作を行わせる油圧モータに接続される方向切換弁や、前記旋回体3に旋回動作を行わせる油圧モータに接続される方向切換弁も、含み得る。同様に、前記比例弁群65は、前記複数の比例弁66に加え、前記油圧モータのそれぞれに接続される方向切換弁のパイロット圧を制御するための比例弁も、含み得る。
前記建設機械1は、該建設機械1の存在位置を検出するためのGNSS受信機50(GNNS:Grobal Navigation Satellite System)と、前記作業装置4の姿勢状態を検出するための複数の姿勢センサ51と、旋回体3(機体)の傾斜角を検出する傾斜センサ52と、ブームシリンダ12、アームシリンダ22、バケットシリンダ32及びバケット回動モータ35を含む複数の油圧アクチュエータの操作状態をそれぞれ検出するための複数のアクチュエータ操作センサ53と、前記バケット30の前記第2回動動作(ヨー動作)に関する設定操作を受けるバケット動作設定操作器54と、掘削作業又は整地作業のためのバケット30の自動操縦の要否を設定する(該自動操縦のON/OFFを切換える)ための自動操縦スイッチ55と、をさらに備える。
前記複数の姿勢センサ51は、複数の角度センサ、例えば、旋回体3に対するブーム10のピッチ動作の方向(支軸11の軸心周りの回転の方向)の回転角であるピッチ角を検出する角度センサと、ブーム10に対するアーム20のピッチ動作の方向(支軸21の軸心周りの回転の方向)の回転角であるピッチ角を検出する角度センサと、アーム20に対するバケット30のピッチ角θp、すなわち当該バケット30のピッチ動作の方向(支軸31の軸心周りの回転の方向)であるピッチ方向の回転角、を検出する角度センサと、アーム20に対するバケット30のヨー角θy、すなわち前記バケット30のヨー動作の方向(前記ヨー軸心C1周りの前記第1回動動作の方向)であるヨー方向の回転角、を検出する角度センサと、を含む。当該複数の角度センサのそれぞれは、例えばロータリーエンコーダ、レゾルバ等により構成され得る。
前記複数の姿勢センサ51は、ブーム10、アーム20及びバケット30のそれぞれのピッチ角を検出する複数の角度センサに限定されない。当該複数の姿勢センサ51は、例えば、ブームシリンダ12、アームシリンダ22及びバケットシリンダ32のストローク変位量をそれぞれ検出する複数のストロークセンサを含むものでもよい。
前記傾斜センサ52は、例えば加速度センサ及び角速度センサの機能を有する慣性センサを含む。該慣性センサの検出信号に基づいてストラップダウン方式等により前記旋回体3の傾斜角を特定することが可能である。
前記複数のアクチュエータ操作センサ53は、例えば、複数のパイロット圧センサを含む。当該複数のパイロット圧センサは、前記方向切換弁71,72,73,74の一対のパイロットポートにそれぞれ付与されるパイロット圧を検出する圧力センサにより構成される。
前記バケット動作設定操作器54及び前記自動操縦スイッチ55は、前記運転室3aに配置されている。前記バケット動作設定操作器54は、本実施形態では、掘削作業時又は整地作業時に複数の設定操作を受けるように構成されている。当該複数の設定操作は、例えば、前記バケット30のヨー方向の振動(前記ヨー軸心C1周りの正転方向及び逆転方向に所定角度ずつ交互に周期的に回動する動作すなわち第2回動動作による振動)であるヨー振動の要否、該ヨー振動の周期Ty(又は周波数)、並びに、該ヨー振動の振幅Ay(正転方向及び逆転方向への最大回転角)を含む。前記ヨー振動の周期Ty(又は周波数)及び該ヨー振動の振幅Ayはそれぞれ既定の範囲内で設定されることが可能である。
前記バケット動作設定操作器54は、バケット30の動作に関する設定のための操作だけでなく、それ以外の建設機械1に関する種々の設定操作を受けるものでもよい。また、バケット動作設定操作器54及び自動操縦スイッチ55は互いに一体に構成されていてもよい。
前記コントローラ60は、マイクロコンピュータ、メモリ、インターフェース回路等を含む電子回路ユニットにより構成される。該コントローラ60には、前記GNSS受信機50により受信されるGNSS信号(建設機械1の存在位置の検出信号)と、前記姿勢センサ51、前記傾斜センサ52及び前記アクチュエータ操作センサ53のそれぞれにより生成される検出信号と、バケット動作設定操作器54及び自動操縦スイッチ55のそれぞれにより生成される操作信号と、が入力される。
前記コントローラ60には、3次元のマップデータがあらかじめ保存され、あるいは、外部のサーバ等からダウンロードされている。当該マップデータは、前記建設機械1による作業が行われる作業現場の実際の地形に関する情報と、当該作業により実現されるべき目標地形に関する情報と、を含む。
前記コントローラ60は、掘削作業時又は整地作業時に前記複数の比例弁66のそれぞれについて適正な指令信号を生成して当該比例弁66に入力することにより前記方向切換弁71~74を操作し、これにより前記ブームシリンダ12、前記アームシリンダ22、前記バケットシリンダ32及び前記バケット回動モータ35の動作を制御する機能を有する。この機能は、前記コントローラ60に実装されたハードウェア構成及びプログラム(ソフトウェア構成)の少なくとも一方により実現される。
次に、この第1の実施形態に係る前記建設機械1が掘削作業時及び整地作業時に行う動作を説明する。本実施形態の建設機械1では、バケット30に前記第2回動動作による振動すなわち前記ヨー振動をさせながら当該バケット30により掘削作業又は整地作業を行うことが可能である。
前記掘削作業は、例えば次のように行われる。前記建設機械1の運転者は、バケット動作設定操作器54に対し、バケット30のヨー振動の周期(又は周波数)と振幅とを設定する操作を与え、さらに、該ヨー振動を実行すべき旨を設定するための操作(ヨー振動をONにする操作)を与える。
さらに、運転者は、図示されない走行操作レバーに適当な走行操作を与えることにより前記建設機械1を所定の作業場所に移動させる。そして、該作業場所にて、作業装置4を動かすための図示されない作業操作レバーに適当な作業操作を与えることにより、ブーム10及びアーム20を動かしてバケット30を掘削作業の開始位置に移動させる。
次いで、運転者は、自動操縦スイッチ55にON操作を与え、さらに、バケット30の実際の移動を開始させるための所定の操作レバー(例えば、アーム20を動かすためのアーム操作レバー)に所定の操作を与える。この操作に伴い、コントローラ60は、GNSS受信機50から入力されるGNSS信号により把握される前記建設機械1の現在位置と、傾斜センサ52から入力される検出信号により把握される旋回体3の傾斜角と、予め格納した作業情報、すなわち、作業現場の実際の地形に関する情報及び掘削作業による目標地形に関する情報(図2に二点鎖線で示される目標施工面Stの位置及び姿勢の情報)、とに基づき、バケット30の目標移動経路を決定し、さらに該目標移動経路を実現するためのブーム10、アーム20、及びバケット30のピッチ方向についての目標姿勢の軌道(時系列パターン)を決定する。
前記バケット30の目標姿勢は、例えば、当該バケット30の爪部30aを地面の内部に食い込ませた後、図2に示すように、バケット30の底部30bから爪部30aに至るまでの壁面である接地壁面30f(又は爪部30aの先端部)が前記目標施工面Stに沿うように決定される。
また、前記コントローラ60は、前記バケット動作設定操作器54に与えられる操作により設定された周期及び振幅で前記バケット30を前記ヨー振動させるように、当該バケット30の前記ヨー角(前記ヨー軸心C1の周りの回転角)θyの目標波形パターン(該ヨー角θyの目標値の経時変化のパターン)を決定する。該目標波形パターンは、例えば図4に例示される三角波形状のパターンに設定される。該目標波形パターンは、三角波形状のパターンに限らず、例えば、正弦波状のパターン等の滑らかな曲線状のパターンであってもよい。
図4に示される前記バケット30のヨー角θyは、前記バケット30の幅方向(この実施の形態では前記複数の爪部30aが並ぶ方向)が前記バケット30の第1回動動作すなわち前記ピッチ動作の軸心であるバケット横軸(この実施の形態では前記支軸31の軸心)の方向に一致もしくはほぼ一致する状態(バケット30のヨー方向での標準姿勢状態)でゼロとなるように、設定されている。
前記コントローラ60は、前記複数の姿勢センサ51のそれぞれの検出信号により把握される前記ブーム10、前記アーム20、及び前記バケット30のそれぞれのピッチ方向についての実際の姿勢を前記目標姿勢に追従させるように、方向切換弁71~73のそれぞれに対応する複数の比例弁66に対して適当な指令信号を入力して当該方向切換弁71~73に付与されるパイロット圧を操作する。これにより、ブーム10、アーム20、及びバケット30のピッチ方向についての実際の姿勢を前記目標姿勢に追従させるようなブームシリンダ12、アームシリンダ22及びバケットシリンダ32の作動の制御が実行される。
また、前記コントローラ60は、前記複数の姿勢センサ51の検出信号により把握される前記バケット30の前記ヨー角θyが予め設定された目標波形パターンに従って変化するように、方向切換弁74に対応する比例弁66に適当な指令信号を入力して該方向切換弁74に付与されるパイロット圧を制御する。これにより、前記バケット30の実際のヨー角θyが前記目標波形パターンに追従するように変化する。すなわち、図5に示す如く、前記バケット30の実際のヨー角が正転方向及び逆転方向に一定の振幅及び周期で交互に変化するような当該バケット30のヨー振動が実現される。
上記のような作業装置4の作動の制御が行われることにより、バケット30にヨー振動をさせながら当該バケット30を目標移動経路に沿って移動させるような地面の掘削作業を行うことが可能になる。
前記バケット30を前記ヨー振動させるための前記バケット回動モータ35は、比較的小型なものでよい。従って、該バケット30を比較的短い周期でヨー振動させることができる。このことは、掘削作業時のバケット30の単位移動量当たりのヨー動作の繰り返し回数を多くすることを可能にし、これにより、前記バケット30が地面に圧接した状態、具体的には前記複数の爪部30aが地中に食い込んだ状態、で前記バケット30がその移動時に受ける抵抗を効果的に軽減することができる。
また、前記バケット30の前記接地壁面30f及び前記複数の爪部30aのそれぞれの先端部の少なくとも一方を前記目標施工面Stに定常的に沿わせた状態でバケット30をヨー振動させながら前記目標施工面Stに沿って移動させることにより、滑らかな施工面を形成することができる。
前記整地作業は、例えば次のように行われる。建設機械1の運転者は、前記掘削作業の場合と同様に、前記バケット動作設定操作器54に対し、バケット30のヨー振動の周期Ty(又は周波数)及び振幅Ayを設定する操作、さらに、該ヨー振動をONにする操作を与える。さらに、運転者は、前記走行操作レバーに適当な走行操作を与えて前記建設機械1を所定の作業場所に移動させ、該作業場所にて、作業装置4の操作のための操作レバーに適当な作業操作を与えることにより、作業装置本体であるブーム10及びアーム20を動かしてバケット30を整地作業の開始位置に移動させる。
次いで、運転者は、自動操縦スイッチ55にON操作を与え、さらに、バケット30の実際の移動を開始するための所定の操作レバー(例えば、前記アーム操作レバー)に所定の操作を与える。この操作に伴い、コントローラ60は、掘削作業の場合と同様に、前記バケット30の目標移動経路を決定し、さらに該目標移動経路を実現するためのブーム10、アーム20、及びバケット30のそれぞれのピッチ方向についての目標姿勢の軌道(時系列パターン)を決定する。
前記バケット30の目標移動経路及び目標姿勢は、図6に示すように、バケット30の底部30bから複数の爪部30aに至るまでの壁面である前記接地壁面30fが前記目標施工面(目標の地面表面)Stに沿うように決定される。
また、前記コントローラ60は、掘削作業の場合と同様に、前記バケット動作設定操作器54に与えられる操作によって設定された周期及び振幅で前記バケット30を前記ヨー振動させるように、前記バケット30のヨー角θyの目標波形パターンを決定する。
前記コントローラ60は、掘削作業の場合と同様に、ブーム10、アーム20、及びバケット30のそれぞれのピッチ方向についての実際の姿勢を前記目標姿勢に追従させるように、前記方向切換弁71~73のそれぞれに対応する比例弁66に対して適当な指令信号を入力して前記ブームシリンダ12、前記アームシリンダ22及び前記バケットシリンダ32の作動を制御する。
また、前記コントローラ60は、掘削作業の場合と同様に、前記バケット30の実際のヨー角θyを前記目標波形パターンで変化させるように、前記方向切換弁74に対応する比例弁66に対して適当な指令信号を入力して前記バケット回動モータ35の作動を制御し、これにより前記目標波形パターンに対応したヨー振動をバケット30に行わせる。
上記のような作業装置4の作動の制御が行われることにより、バケット30をヨー振動させながら当該バケット30を目標移動経路に沿って移動させるような地面の整地作業が実現される。
前記整地作業においても、前記掘削作業時と同様に、前記バケット30を比較的短い周期でヨー振動させることができるので、前記バケット30が地面に圧接した状態、具体的には前記接地壁面30fが地面に押し付けられた状態、で前記バケット30が前記目標移動経路に沿って移動する際に受ける抵抗を効果的に軽減することができる。
また、前記バケット30の前記接地壁面30f及び前記複数の爪部30aの先端部の少なくとも一方を目標施工面Stに定常的に沿わせた状態で当該バケット30をヨー振動させながら前記目標移動経路に沿って移動させることにより、滑らかな施工面を形成することができる。
次に、本発明の第2実施形態を図7~図10を参照して以下に説明する。なお、第2実施形態に含まれる構成要素のうち第1実施形態に含まれる構成要素と同一のものについては説明を省略する。
図7に示すように、第2実施形態に係るバケット30は、第1実施形態のものと同様に、複数の爪部30aと、バケット側取付け部材30cと、を有するとともに、アーム20に対して相対的にピッチ動作及びチルト動作をし得るように、アーム20の先端部に取付けられている。前記チルト動作は、前記バケット30における複数の爪部30aの延在方向、つまり当該複数の爪部30aの突出方向、に平行な方向(ほぼ一致する方向も含む。)に延びるチルト軸心C2周りの回動動作である。当該チルト軸心C2は、図10に示すように当該チルト軸心C2に沿う方向から見たときに前記バケット30の直上方の位置にあることが、好ましい。
この第2の実施形態に係る前記チルト軸心C2は、換言すれば、前記接地壁面30fと平行な方向(ほぼ平行な方向も含む。)でかつ前記バケット横軸に対して直交する方向(ほぼ直交する方向も含む。)の軸心である。従って、この第2実施形態に係る「チルト動作」は、バケット横軸と直交する方向の軸回りの回動動作、すなわち本発明にいう第2回動動作、に相当する。
詳細には、前記バケット側取付け部材30cは平板状の本体を有し、この本体に回動軸30dが固定されている。当該回動軸30dは前記バケット側取付け部材30cの前記本体と平行な方向に延びる姿勢で当該バケット側取付け部材30cに固定され、当該回動軸30dの軸心が前記チルト軸心C2に合致している。一方、前記第1実施形態と同様に前記アーム20にピッチ動作すなわち旋回体3の左右方向の軸回りの回動動作が可能となるようにアーム側付け部材33が取付けられ、このアーム側取付け部材33に前記回動軸30dの両端がそれぞれ軸受33a,33bを介してその軸心周りすなわち前記チルト軸心C2回りに回動可能に支承されている。
この第2の実施形態に係る建設機械1は、前記バケット30に前記チルト動作を行わせるためのチルトアクチュエータ、すなわち前記バケット30に第2回動動作を行わせるための第2バケットアクチュエータ、として、それぞれが油圧シリンダである一対の左右バケットチルトシリンダ36を備える。当該一対の左右バケットチルトシリンダ36は、前記バケット30の左右側面と前記アーム側取付け部材33との間に介設されている。図7に示される例では、前記一対のバケットチルトシリンダ36は、バケット30の左右側面にそれぞれ連結されるロッド側端部(図7に示される姿勢では下側の端部)と前記アーム側付け部材33に連結されるへッド側端部(図7に示される姿勢では上側の端部)と、を有する。図7では、左バケットチルトシリンダ36のみが示されている。前記へッド側端部は、前記バケットチルトシリンダ36のシリンダ本体の両端部のうちロッドと反対側の端部であり、前記アーム側付け部材33に固定されたブラケット33cに前記チルト軸心C2と平行な方向の軸心周りに揺動可能に連結されている。前記ロッド側端部は、前記ロッドの先端部であり、前記バケット30の左右側面にそれぞれ固定されたブラケット30eに前記チルト軸心C2と平行な方向の軸心周りに揺動可能に連結されている。
従って、この第2の実施形態に係る前記バケット30は、第1の実施形態と同様にバケットシリンダ32の伸縮動作に対応して支軸31の軸心周りの第1回動動作すなわちピッチ動作をすると共に、前記バケットチルトシリンダ36の伸縮動作、詳しくは一方のバケットチルトシリンダ36の伸長動作と他方のバケットチルトシリンダ36の収縮動作、に対応して前記チルト軸心C2周りの第2回動動作すなわちチルト動作をする。
前記バケット30をチルト方向に回動させるチルトアクチュエータ(本発明にいう第2バケットアクチュエータ)は、前記一対のバケットチルトシリンダ36に限定されない。該チルトアクチュエータは、例えば、前記回動軸30dに連結されてこれを回動させることにより前記バケット30を前記チルト軸心C2周りに回動させる油圧モータまたは電動モータであってもよい。
この第2の実施形態に係る建設機械1は、前記第1の実施形態と同様、図8に示すようなコントローラ60、比例弁群65及びコントロールバルブユニット70を備えるが、前記コントロールバルブユニット70は、第1実施形態においてバケット回動モータ35に接続される前記方向切換弁74に代えて前記一対のバケットチルトシリンダ36にそれぞれ接続されるパイロット操作式の方向切換弁75を含み、前記比例弁群65は、前記第1の実施形態において前記方向切換弁74の一対のパイロットポートに接続される比例弁66の代わりに、前記方向切換弁75の一対のパイロットポートに接続される比例弁66を含む。
また、この第2の実施形態に係る建設機械1は前記第1の実施形態と同様に複数の姿勢センサ51を含むが、当該複数の姿勢センサ51は、前記第1の実施形態において前記バケット30のヨー角θyを検出する角度センサの代わりに、前記バケット30のチルト方向の回転角すなわちチルト軸心C2の周りの回転角であるチルト角θtを検出する角度センサを含む。
この第2の実施形態に係る建設機械1は前記第1の実施形態と同様にバケット動作設定操作器54を備えるが、当該バケット動作設定操作器54は、建設機械1による掘削作業時に、前記バケット30のチルト方向の振動(前記チルト軸心C2周りの正転方向及び逆転方向に所定角度ずつ交互に周期的に回動する動作すなわち前記第2回動動作による振動)であるチルト振動の要否、該チルト振動の周期Tt(又は周波数)、並びに、該チルト振動の振幅At(正転方向及び逆転方向への最大回転角)を設定するための操作を受けるように構成されている。前記チルト振動の周期Tt(又は周波数)及び振幅Atはそれぞれ既定の範囲内で設定可能である。
次に、この第2の実施形態に係る建設機械1が掘削作業時に行う動作を説明する。当該建設機械1では、前記バケット30に前記第2回動動作による振動すなわち前記チルト振動をさせながら当該バケット30により掘削作業を行うことが可能である。
前記掘削作業は、例えば次のように行われる。前記建設機械1の運転者は、バケット動作設定操作器54に対し、バケット30のチルト振動の周期(又は周波数)及び振幅を設定する操作を与え、さらに、該チルト振動を実行すべき旨を設定するための操作(チルト振動のON操作)を与える。
さらに、運転者は、図示されない走行操作レバーに適当な走行操作を与えることにより前記建設機械1を所定の作業場所に移動させる。そして、該作業場所にて、作業装置4を動かすための図示されない作業操作レバーに適当な作業操作を与えることにより、ブーム10及びアーム20を動かしてバケット30を掘削作業の開始位置に移動させる。
次いで、運転者は、自動操縦スイッチ55にON操作を与え、さらに、バケット30の実際の移動を開始するための所定の操作レバー(例えば、前記アーム操作レバー)に所定の操作を与える。この操作に伴い、コントローラ60は、前記第1の実施形態に係るコントローラ60と同様に、前記バケット30の目標移動経路を決定し、さらに該目標移動経路を実現するためのブーム10、アーム20、及びバケット30のピッチ方向についての目標姿勢の軌道(時系列パターン)を決定する。
前記バケット30の目標移動経路及び目標姿勢は、例えば、当該バケット30の爪部30aを地面の内部に食い込ませた後、バケット30を前記バケット動作設定操作器54により設定された振幅で図10に示すように正転方向及び逆転方向のそれぞれに最大角度までチルト動作させたとき(つまりチルト軸心C2周りに回動させたとき)に前記バケット30の複数の爪部30aのうちの最も下方の爪部30aが図7に二点鎖線で示される目標施工面Stに沿うように、決定される。
また、前記コントローラ60は、前記バケット動作設定操作器54に与えられる操作により設定された周期及び振幅で前記バケット30をチルト振動させるように、当該バケット30のチルト角(前記チルト軸心C2周りの回転角)θtの目標波形パターン(該チルト角θtの目標値の経時変化のパターン)を決定する。該目標波形パターンは、例えば図9に例示される三角波形状のパターンに設定される。該目標波形パターンは、三角波形状のパターンに限らず、例えば、正弦波状のパターン等の滑らかな曲線状のパターンであってもよい。
図9に示される前記バケット30のチルト角θtは、前記バケット30の幅方向(前記複数の爪部30aが並ぶ方向)が前記バケット30の第1回動動作すなわちピッチ動作の軸心であるバケット横軸(この実施の形態では前記支軸31の軸心)の方向に一致もしくはほぼ一致する状態(バケット30のチルト方向での標準姿勢状態)でゼロとなるように、設定されている。
前記コントローラ60は、前記第1の実施形態に係るコントローラ60と同様に、前記ブーム10、前記アーム20、及び前記バケット30のそれぞれのピッチ方向についての実際の姿勢を前記目標姿勢に追従させるように、方向切換弁71~73のそれぞれに対応する複数の比例弁66に対して適当な指令信号を入力することにより、ブームシリンダ12、アームシリンダ22及びバケットシリンダ32の作動を制御する。
また、前記コントローラ60は、前記複数の姿勢センサ51のそれぞれの検出信号により把握される前記バケット30の実際のチルト角θtが予め設定された目標波形パターンに従って変化するように、方向切換弁75に対応する比例弁66に適当な指令信号を入力して該方向切換弁75に付与されるパイロット圧を操作する。これにより、バケット30の実際のチルト角θtが前記目標波形パターンに追従するように変化する。すなわち、図10に示す如く、前記バケット30の実際のチルト角θt、すなわち前記チルト軸心C2周りの回転角、が正転方向及び逆転方向に一定の振幅At及び周期Ttで交互に変化するような第2回動動作(チルト動作)をバケット30が行う。
掘削作業時に上記のような作業装置4の作動制御が行われることにより、バケット30にチルト振動をさせながら、当該バケット30を目標移動経路に沿って移動させるような地面の掘削作業が行われる。
前記バケット30をチルト振動させるための前記一対のバケットチルトシリンダ36は、比較的小型なものでよい。従って、該バケット30を比較的短い周期でチルト振動させることができる。このことは、掘削作業時のバケット30の単位移動量当たりのチルト動作の繰り返し回数を多くすることを可能にする。これにより、爪部30aが地中に食い込んだ状態でバケット30がその移動時に受ける抵抗を効果的に軽減することができる。
また、前記バケット30のチルト振動すなわち前記複数の爪部30aの延在方向と平行な方向のチルト軸心C2回りの回動動作による振動は、当該バケット30の複数の爪部30aの向きの変動を伴わないので、当該チルト振動にかかわらず前記複数の爪部30aの向きを常にバケット30の移動方向と平行な方向に維持することができる。このことは、掘削作業により実現される施工面の滑らかさを確保することを可能にする。
さらに、上述のように、バケット30をチルト振動における正転方向及び逆転方向のそれぞれの方向に最大角度まで回動させたときに前記複数の爪部30aのうちの最も下方の爪部30aが目標の施工面に沿うようにバケット30をセットすることにより、掘削作業で実現される施工面が目標施工面Stよりも深くなるのを防止することができる。
本発明は、以上説明した実施形態に限定されない。本発明は、例えば次のような態様を包含する。
前記第1及び第2の実施形態では、バケット30のヨー振動やチルト振動が自動操縦による掘削作業や整地作業の際に行われるが、本発明における掘削作業や整地作業の態様は限定されない。例えば、運転者がその手動操作によって掘削作業や整地作業を行う際に所定の操作ボタンを操作する等によって、バケット30のヨー振動又はチルト振動が実行されてもよい。
前記第1実施形態及び第2実施形態ではバケット30がヨー方向及びチルト方向のうちのいずれか一方の方向にのみ回動可能であるが、本発明はこれに限定されない。本発明に係るバケットは、ヨー方向及びチルト方向の両方向に回動し得るように作業装置本体の先端部(例えば前記アーム20の先端部)に取付けられていてもよい。
前記第1実施形態及び第2実施形態では、バケット30のヨー振動又はチルト振動の振幅及び周期の双方が可変であってこれらを運転者等が設定可能であるが、本発明はこれに限られない。例えば、該振幅及び周期のいずれか一方のみが可変でもよいし、あるいは、該振幅及び周期の双方が一定値に固定されていてもよい。
本発明に係る建設機械は図1に示されるようなクローラ式の油圧ショベルに限定されない。本発明に係る建設機械は、例えば、ホイール式のショベルであってもよい。また、本発明に係る建設機械は、走行体に対して旋回可能な旋回体を備えないものであってもよい。また、作業装置本体(例えば前記ブーム10)は、前記ピッチ動作に加えて、垂直軸回りの回動であるヨー動作及び/又は旋回体3の幅方向と平行なスライド動作を行い得るものでもよい。
以上のように、地面から受けるバケットの抵抗を軽減し、かつ施工面の滑らかさを向上することができる建設機械が提供される。この建設機械は、機体と、当該機体に搭載される作業装置と、前記作業装置の動作を制御する制御装置と、を備える。前記作業装置は、前記機体に連結される基端部及びその反対側の先端部を有する作業装置本体と、前記作業装置の前記先端部に当該先端部に対して相対的に第1回動動作と第2回動動作とを行い得るように前記作業装置に取付けられたバケットと、前記バケットを前記作業装置本体に対して相対的に動かす複数のバケットアクチュエータと、を有する。前記第1回動動作は前記バケットの幅方向と平行な方向のバケット横軸周りの回動動作であるピッチ動作であり、前記第2回動動作は前記バケット横軸と直交する方向の軸回りの回動動作である。前記複数のバケットアクチュエータは、前記バケットに前記第1回動動作を行わせる第1バケットアクチュエータと、前記バケットに前記第2回動動作を行わせる第2バケットアクチュエータと、を含む。前記制御装置は、前記バケットが地面に圧接した状態で前記バケットを前記第2回動動作によって周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている。
前記建設機械において、前記バケットに第2回動動作(例えばヨー動作又はチルト動作)を行わせるための前記第2バケットアクチュエータは、当該バケットにピッチ動作である第1回動動作を行わせるための前記第1アクチュエータに比して小型なものでよく、従って、当該バケットの第2回動動作(例えばヨー動作又はチルト動作による振動を比較的短い周期で素早く行わせることができる。このため、前記バケットが地面に圧接した作業時(例えば掘削作業時や整地作業時)に前記バケットを前記第2回動動作によって周期的に振動させることは、バケットが地面から受ける抵抗を効果的に軽減することを可能にする。
前記バケットが、底部と、当該バケットの先端において互いに同じ方向に突出する複数の爪部と、前記底部から前記複数の爪部に至るまでの壁面であって施工面に接触可能な接地壁面と、を有する場合、前記第2回動動作は、例えば、前記接地壁面に対して直交する方向の軸周りの回動動作であるヨー動作が好適である。すなわち、前記制御装置は前記バケットを前記ヨー動作の方向であるヨー方向に振動させるように前記第2バケットアクチュエータを制御するように構成されているのが、好ましい。このヨー動作では、前記接地壁面すなわち前記バケットの前記底部から前記複数の爪部に至るまでの壁面をほぼ一定の姿勢に維持しながら当該バケットを振動させることが可能である。このことは、施工面のうねり等の発生を抑えながらバケットを移動させることを可能にし、これにより、前記バケットがその移動時に地面から受ける抵抗を軽減しながら滑らかな施工面を形成することを可能にする。
このように前記バケットがヨー動作可能な態様において、前記制御装置は、前記バケットにより前記地面を掘削する掘削作業時に、前記接地壁面及び前記複数の爪部の先端部の少なくとも一方が目標の施工面に沿うように該バケットを移動させるように前記作業装置の作動を制御するように構成されていることが好ましい。このことは、掘削作業により実現される施工面を目標の施工面に精度よく合致させることを可能にする。
また、前記制御装置は、前記接地壁面を地面に押し付けた状態で該バケットを移動させることにより該地面の整地を行う整地作業時に前記バケットを前記ヨー動作の方向であるヨー方向に周期的に振動させるように前記第2バケットアクチュエータの動作を制御するように構成されていることが好ましい。前記バケットのヨー動作では、前記バケットの前記接地壁面をほぼ一定の姿勢に維持することが可能であるため、地面を滑らかに整地することができる。
前記制御装置は、前記整地作業時に、前記バケットの前記接地壁面が目標の施工面に沿うように該バケットを移動させるように前記作業装置の作動を制御するように構成されていることが好ましい。この制御は、整地作業により実現される施工面を目標の施工面に精度よく合致させることを可能にする。
前記バケットが、底部と、当該バケットの先端において互いに同じ方向に突出する複数の爪部と、前記底部から前記複数の爪部に至るまでの壁面であって施工面に接触可能な接地壁面と、を有する場合、前記第2回動動作は、前記複数の爪部が突出する方向の軸周りの回動動作であるチルト動作であってもよい。すなわち、前記制御装置は前記バケットを前記チルト動作の方向に振動させるように前記第2バケットアクチュエータを制御するように構成されていてもよい。前記チルト動作では、掘削作業時に、前記複数の爪部の突出方向を前記バケットの移動方向(掘削方向)とほぼ同方向に維持することが可能である。このことは、施工面のうねり等の発生を抑えながらバケットを移動させることを可能にし、これにより、前記バケットがその移動時に地面から受ける抵抗を軽減しながら滑らかな施工面を形成することを可能にする。
前記のように前記バケットが前記チルト動作を行うことが可能な態様において、前記制御装置は、前記バケットにより地面を掘削する掘削作業時に、前記バケットの前記チルト動作の方向の振動における最大の回動量だけ該バケットを当該チルト動作の方向に回動させたときに該バケットの前記複数の爪部のうちの最も下方の爪部が目標の施工面に沿うように該バケットを移動させるように、前記作業装置の作動を制御するように構成されていることが好ましい。この制御は、前記掘削作業により実現される施工面が前記チルト動作に起因して目標の施工面よりも深い施工面になるのを防止することができる。
前記制御装置は、前記バケットの振動の周期及び振幅の少なくとも一方を変更可能にするように構成されていることが好ましいこのことは、前記バケットの振動の周期及び振幅の少なくとも一方を作業対象の地面の状態等に適した値に設定することを可能にする。
Claims (8)
- 建設機械であって、
機体と、
前記機体に搭載される作業装置と、
前記作業装置の動作を制御する制御装置と、を備え、
前記作業機械は、前記機体に連結される基端部及びその反対側の先端部を有する作業装置本体と、前記作業装置の前記先端部に当該先端部に対して相対的に第1回動動作及び第2回動動作を行い得るように前記作業装置に取付けられたバケットと、前記バケットを前記作業装置本体に対して相対的に動かす複数のバケットアクチュエータと、を有し、前記第1回動動作は前記バケットの幅方向と平行な方向のバケット横軸周りの回動動作であるピッチ動作であり、前記第2回動動作は前記バケット横軸と直交する方向の軸回りの回動動作であり、前記複数のバケットアクチュエータは、前記バケットに前記第1回動動作を行わせる第1バケットアクチュエータと、前記バケットに前記第2回動動作を行わせる第2バケットアクチュエータと、を含み、
前記制御装置は、前記バケットが地面に圧接した状態で前記バケットを前記第2回動動作によって周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている、建設機械。 - 請求項1記載の建設機械において、前記バケットは、底部と、当該バケットの先端において互いに同じ方向に突出する複数の爪部と、前記底部から前記複数の爪部に至るまでの壁面であって施工面に接触可能な接地壁面と、を有し、前記第2回動動作は、前記接地壁面に対して直交する方向の軸周りの回動動作であるヨー動作であり、前記制御装置は前記ヨー動作の方向であるヨー方向に前記バケットを周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている、建設機械。
- 請求項2記載の建設機械において、前記制御装置は、前記バケットにより地面を掘削する掘削作業時に前記接地壁面及び前記複数の爪部の先端部の少なくとも一方が目標の施工面に沿うように該バケットを移動させるように前記作業装置の作動を制御するように構成されている、建設機械。
- 請求項2又は3記載の建設機械において、前記制御装置は、前記接地壁面を地面に押し付けた状態で前記バケットを移動させることにより該地面の整地を行う整地作業時に、前記バケットを前記ヨー動作の方向であるヨー方向に周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている、建設機械。
- 請求項4記載の建設機械において、前記制御装置は、前記整地作業時に、前記接地壁面が目標の施工面に沿うように該バケットを移動させるように前記作業装置の作動を制御するように構成されている、建設機械。
- 請求項1記載の建設機械において、前記バケットは、底部と、当該バケットの先端において互いに同じ向きに突出する複数の爪部と、前記底部から前記複数の爪部に至るまでの壁面であって施工面に接触可能な接地壁面と、を有し、前記第2回動動作は、前記複数の爪の突出の方向と平行な方向の軸周りの回動動作であるチルト動作であり、前記制御装置は前記チルト動作の方向であるチルト方向に前記バケットを周期的に振動させるように前記第2バケットアクチュエータを制御するように構成されている、建設機械。
- 請求項6記載の建設機械において、前記制御装置は、前記バケットにより地面を掘削する掘削作業時に、前記バケットの前記チルト動作の方向の振動における最大の回動量だけ該バケットを前記チルト方向に回動させたときに該バケットの前記複数の爪部のうちの最も下方の爪部が目標の施工面に沿うように該バケットを移動させるように、前記作業装置の作動を制御するように構成されている、建設機械。
- 請求項1~7のいずれか1項に記載の建設機械において、前記制御装置は、前記バケットの振動の周期及び振幅のうちの少なくとも一方を変更可能とするように構成されている、建設機械。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201980017376.4A CN111819331B (zh) | 2018-03-28 | 2019-02-06 | 工程机械 |
| EP19774444.4A EP3748086B1 (en) | 2018-03-28 | 2019-02-06 | Construction machine |
| US16/980,754 US11377815B2 (en) | 2018-03-28 | 2019-02-06 | Construction machine |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018061968A JP6969475B2 (ja) | 2018-03-28 | 2018-03-28 | 建設機械 |
| JP2018-061968 | 2018-03-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019187659A1 true WO2019187659A1 (ja) | 2019-10-03 |
Family
ID=68058847
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/004150 WO2019187659A1 (ja) | 2018-03-28 | 2019-02-06 | 建設機械 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11377815B2 (ja) |
| EP (1) | EP3748086B1 (ja) |
| JP (1) | JP6969475B2 (ja) |
| CN (1) | CN111819331B (ja) |
| WO (1) | WO2019187659A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116988526A (zh) * | 2023-09-28 | 2023-11-03 | 神农乡村产业发展(山西)有限公司 | 一种平整土地的推土机及其平整方法 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3904611A4 (en) * | 2018-12-25 | 2022-10-26 | Kubota Corporation | WORK MACHINE |
| CN113677855A (zh) * | 2019-03-29 | 2021-11-19 | 住友建机株式会社 | 挖土机及挖土机的控制装置 |
| US11619026B2 (en) * | 2019-10-02 | 2023-04-04 | Caterpillar Inc. | Motor grader suspended mass ride control |
| JP7402026B2 (ja) * | 2019-11-27 | 2023-12-20 | 株式会社小松製作所 | 作業機械の制御システム、作業機械、作業機械の制御方法 |
| CN111395441A (zh) * | 2020-04-27 | 2020-07-10 | 徐州徐工铁路装备有限公司 | 一种地下铲运机智能减阻控制系统及控制方法 |
| WO2022183294A1 (en) * | 2021-03-03 | 2022-09-09 | Modern Fabrication Inc. | Material handler skip pan |
| CN117500986A (zh) * | 2021-06-28 | 2024-02-02 | 斗山山猫北美公司 | 用于控制挖掘机和其他动力机器的系统和方法 |
| KR20230032293A (ko) * | 2021-08-30 | 2023-03-07 | 볼보 컨스트럭션 이큅먼트 에이비 | 건설기계 |
| KR20230032490A (ko) * | 2021-08-31 | 2023-03-07 | 볼보 컨스트럭션 이큅먼트 에이비 | 건설기계 |
| CN116145751B (zh) * | 2023-02-10 | 2023-08-15 | 邹城市巨力机械有限公司 | 一种挖掘机工作装置用旋转驱动轴 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0224424A (ja) | 1988-07-14 | 1990-01-26 | Komatsu Ltd | 油圧掘削機の自動振動方法及び自動振動装置 |
| JPH064157U (ja) * | 1992-06-25 | 1994-01-18 | 株式会社オノデラ | パワーショベル用バケット |
| JP3019505U (ja) * | 1995-06-16 | 1995-12-19 | 九州建設機械販売株式会社 | チルトバケット装置 |
| JPH0860692A (ja) * | 1994-08-23 | 1996-03-05 | Yutani Heavy Ind Ltd | 揺動バケット装置 |
| JPH08165678A (ja) | 1994-12-12 | 1996-06-25 | Yanmar Diesel Engine Co Ltd | 掘削制御装置 |
| WO2014209209A1 (en) * | 2013-06-25 | 2014-12-31 | Steelwrist Ab | System and methods for with a first and a second hand operated control, controlling motion on a work tool for a construction machine |
| WO2016125232A1 (ja) * | 2015-02-02 | 2016-08-11 | 株式会社小松製作所 | 作業車両および作業車両の制御方法 |
| US9816249B2 (en) * | 2016-02-02 | 2017-11-14 | Caterpillar Trimble Control Technologies Llc | Excavating implement heading control |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4662684A (en) * | 1979-12-13 | 1987-05-05 | H. B. Zachery Corporation | Rotary rock and trench cutting saw |
| ZA838903B (en) | 1983-11-29 | 1984-08-29 | Pulsar Int Ltd | A material working machine |
| US5398430A (en) * | 1991-05-20 | 1995-03-21 | Scott; Thomas M. | Earth moving and compacting rig |
| SE501168C2 (sv) * | 1992-04-01 | 1994-11-28 | Smp Parts Ab | Kopplingsanordning |
| US7076354B2 (en) | 2000-03-24 | 2006-07-11 | Komatsu Ltd. | Working unit control apparatus of excavating and loading machine |
| KR100609494B1 (ko) * | 2005-05-24 | 2006-08-08 | 임영주 | 집게를 구비한 굴삭기용 버킷 어셈블리 |
| US7810260B2 (en) * | 2007-12-21 | 2010-10-12 | Caterpillar Trimble Control Technologies Llc | Control system for tool coupling |
| CN201846574U (zh) * | 2010-10-11 | 2011-06-01 | 许春林 | 深松铲可摆动式安装结构 |
| US8631595B2 (en) * | 2011-06-22 | 2014-01-21 | Jason Wayne McDonald | Excavating apparatus with swivel mount employing swivel adapter with gear bearings having gears with divergent thickness |
| CN103615025B (zh) * | 2013-11-20 | 2017-01-04 | 广西柳工机械股份有限公司 | 一种装载机铲装作业的控制方法及装载机 |
| US9828747B2 (en) | 2014-05-15 | 2017-11-28 | Komatsu Ltd. | Display system for excavating machine, excavating machine, and display method for excavating machine |
| JP5848451B1 (ja) * | 2014-06-02 | 2016-01-27 | 株式会社小松製作所 | 建設機械の制御システム、建設機械、及び建設機械の制御方法 |
| US9976279B2 (en) * | 2016-02-02 | 2018-05-22 | Caterpillar Trimble Control Technologies Llc | Excavating implement heading control |
| CN105926695B (zh) * | 2016-05-30 | 2019-03-15 | 太原科技大学 | 一种挖掘机用倾斜旋转装置 |
| US9976285B2 (en) * | 2016-07-27 | 2018-05-22 | Caterpillar Trimble Control Technologies Llc | Excavating implement heading control |
-
2018
- 2018-03-28 JP JP2018061968A patent/JP6969475B2/ja active Active
-
2019
- 2019-02-06 CN CN201980017376.4A patent/CN111819331B/zh active Active
- 2019-02-06 US US16/980,754 patent/US11377815B2/en active Active
- 2019-02-06 EP EP19774444.4A patent/EP3748086B1/en active Active
- 2019-02-06 WO PCT/JP2019/004150 patent/WO2019187659A1/ja unknown
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0224424A (ja) | 1988-07-14 | 1990-01-26 | Komatsu Ltd | 油圧掘削機の自動振動方法及び自動振動装置 |
| JPH064157U (ja) * | 1992-06-25 | 1994-01-18 | 株式会社オノデラ | パワーショベル用バケット |
| JPH0860692A (ja) * | 1994-08-23 | 1996-03-05 | Yutani Heavy Ind Ltd | 揺動バケット装置 |
| JPH08165678A (ja) | 1994-12-12 | 1996-06-25 | Yanmar Diesel Engine Co Ltd | 掘削制御装置 |
| JP3019505U (ja) * | 1995-06-16 | 1995-12-19 | 九州建設機械販売株式会社 | チルトバケット装置 |
| WO2014209209A1 (en) * | 2013-06-25 | 2014-12-31 | Steelwrist Ab | System and methods for with a first and a second hand operated control, controlling motion on a work tool for a construction machine |
| WO2016125232A1 (ja) * | 2015-02-02 | 2016-08-11 | 株式会社小松製作所 | 作業車両および作業車両の制御方法 |
| US9816249B2 (en) * | 2016-02-02 | 2017-11-14 | Caterpillar Trimble Control Technologies Llc | Excavating implement heading control |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3748086A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116988526A (zh) * | 2023-09-28 | 2023-11-03 | 神农乡村产业发展(山西)有限公司 | 一种平整土地的推土机及其平整方法 |
| CN116988526B (zh) * | 2023-09-28 | 2023-12-08 | 神农乡村产业发展(山西)有限公司 | 一种平整土地的推土机及其平整方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3748086B1 (en) | 2023-04-05 |
| US11377815B2 (en) | 2022-07-05 |
| CN111819331A (zh) | 2020-10-23 |
| JP2019173362A (ja) | 2019-10-10 |
| JP6969475B2 (ja) | 2021-11-24 |
| EP3748086A4 (en) | 2021-06-30 |
| CN111819331B (zh) | 2022-06-14 |
| EP3748086A1 (en) | 2020-12-09 |
| US20210002853A1 (en) | 2021-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019187659A1 (ja) | 建設機械 | |
| US9663917B2 (en) | Work vehicle, bucket device, and method for obtaining tilt angle | |
| KR101907938B1 (ko) | 건설 기계의 제어 장치 및 건설 기계의 제어 방법 | |
| JP6727735B2 (ja) | 掘削具先頭方向の制御 | |
| JP6867398B2 (ja) | 作業機械の制御システム及び作業機械の制御方法 | |
| CN113348284B (zh) | 作业机械 | |
| US9689145B1 (en) | Work vehicle and method for obtaining tilt angle | |
| CN111794298B (zh) | 用于控制挖掘机的多个连杆的移动的系统 | |
| WO2020137275A1 (ja) | 作業機械 | |
| WO2020195880A1 (ja) | 作業機械、システムおよび作業機械の制御方法 | |
| JP2020143449A (ja) | 作業機械 | |
| WO2023054615A1 (ja) | 作業機械を制御するためのシステム、方法およびプログラム | |
| WO2023054603A1 (ja) | 作業機械を制御するためのシステムおよび方法 | |
| WO2023054608A1 (ja) | 作業機械を制御するためのシステムおよび方法 | |
| WO2022176515A1 (ja) | 作業機モーメントを推定する方法 | |
| JP7030149B2 (ja) | 作業機械 | |
| JP6912687B2 (ja) | 油圧ショベル | |
| WO2020194914A1 (ja) | 作業機械 | |
| WO2018123470A1 (ja) | 建設機械の制御装置及び建設機械の制御方法 | |
| JP7498679B2 (ja) | 作業機械 | |
| WO2023054623A1 (ja) | 作業機械を制御するためのシステム、方法およびプログラム | |
| JP2023035986A (ja) | 建設機械 | |
| CN115726408A (zh) | 建筑设备 | |
| JPH07317097A (ja) | 直線掘削作業装置 | |
| JP2019100111A (ja) | 建設機械の制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19774444 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2019774444 Country of ref document: EP Effective date: 20200903 |