WO2019035255A1 - Dispositif de nettoyage de capteur embarqué - Google Patents
Dispositif de nettoyage de capteur embarqué Download PDFInfo
- Publication number
- WO2019035255A1 WO2019035255A1 PCT/JP2018/019808 JP2018019808W WO2019035255A1 WO 2019035255 A1 WO2019035255 A1 WO 2019035255A1 JP 2018019808 W JP2018019808 W JP 2018019808W WO 2019035255 A1 WO2019035255 A1 WO 2019035255A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cleaning device
- vehicle sensor
- sensor cleaning
- nozzle
- movable nozzle
- Prior art date
Links
Images
























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/56—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B08—CLEANING
- B08B—CLEANING IN GENERAL; PREVENTION OF FOULING IN GENERAL
- B08B5/00—Cleaning by methods involving the use of air flow or gas flow
- B08B5/02—Cleaning by the force of jets, e.g. blowing-out cavities
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/46—Cleaning windscreens, windows or optical devices using liquid; Windscreen washers
- B60S1/48—Liquid supply therefor
- B60S1/52—Arrangement of nozzles; Liquid spreading means
- B60S1/522—Arrangement of nozzles; Liquid spreading means moving liquid spreading means, e.g. arranged in wiper arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60S—SERVICING, CLEANING, REPAIRING, SUPPORTING, LIFTING, OR MANOEUVRING OF VEHICLES, NOT OTHERWISE PROVIDED FOR
- B60S1/00—Cleaning of vehicles
- B60S1/02—Cleaning windscreens, windows or optical devices
- B60S1/56—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens
- B60S1/60—Cleaning windscreens, windows or optical devices specially adapted for cleaning other parts or devices than front windows or windscreens for signalling devices, e.g. reflectors
Definitions
- the present disclosure relates to an on-vehicle sensor cleaning device.
- an on-vehicle sensor cleaning device which ejects a liquid to the front of an optical surface (sensing surface) of an on-vehicle optical sensor and removes foreign matter attached to the optical surface (see, for example, Patent Document 1).
- an on-vehicle sensor cleaning apparatus good cleaning performance can be obtained by ejecting the liquid onto the optical surface while the nozzle disposed facing the optical surface moves along the optical surface.
- An object of the present disclosure is to provide an on-vehicle sensor cleaning device that suppresses the influence of on-vehicle sensors on sensing.
- an on-vehicle sensor cleaning device in an on-vehicle sensor including a sensing surface.
- the in-vehicle sensor cleaning device includes an injection port for injecting a fluid to the sensing surface in a state of being disposed outside the sensing range of the in-vehicle sensor.
- the in-vehicle sensor cleaning device further includes a movable nozzle that moves the injection port so that the injection axis position of the injection port is changed.
- FIG. 7 is a top view of the in-vehicle sensor cleaning device of FIG.
- FIG. 10 is a front view of the sensor system of FIG. 9;
- FIG. 10 is a plan view of the sensor system of FIG. 9;
- FIG. 12 is a cross-sectional view taken along line 12-12 in FIG. 13 is a cross-sectional view taken along line 13-13 in FIG. Explanatory drawing for demonstrating the rotational speed of the nozzle in a modification.
- the schematic block diagram of the nozzle in a modification. 17 is a cross-sectional view taken along line 17-17 in FIG. (A)-(d) is sectional drawing in alignment with the 18-18 line in FIG.
- FIG. 21 is a plan view of the in-vehicle sensor cleaning device of FIG. 20; The front view of the sensor system of FIG. Explanatory drawing for demonstrating the rotational speed of the nozzle of FIG.
- FIG. 26 is a cross-sectional view of the in-vehicle sensor cleaning device of FIG. 25.
- the sensor system 1 cleans the optical surface (sensing surface) 11 of the on-vehicle optical sensor 10 by being stacked on the on-vehicle optical sensor 10 as the on-vehicle sensor and the on-vehicle optical sensor 10. And an on-vehicle sensor cleaning device 20.
- the on-vehicle optical sensor 10 is, for example, a sensor (for example, Lidar) that emits (emits) an infrared laser and measures the distance to the object by receiving scattered light reflected from the object (for example, Lidar).
- a sensor for example, Lidar
- the side facing the optical surface 11 is referred to as the front, and the opposite side is described as the rear.
- the stacking direction of the on-vehicle sensor cleaning device 20 with respect to the on-vehicle optical sensor 10 is referred to as the vertical direction or the vertical direction, and the vertical direction and the direction orthogonal to the front and rear direction are referred to as the horizontal direction.
- the optical surface 11 is a surface which is convex forward and has a curved shape as viewed in the vertical direction.
- the on-vehicle sensor cleaning device 20 includes a nozzle unit 21 stacked and disposed above (on the upper side in the vertical direction) the on-vehicle optical sensor 10 and a pump (fluid pump) that supplies fluid to the nozzle unit 21. And 22.
- the nozzle unit 21 includes a housing 23, a nozzle 24 as a movable nozzle provided so as to expose at least a part from the housing 23 forward, a nozzle 24 and a pump 22. And a drive unit 26 housed in the housing 23.
- connection portion 25 is fixed by a screw in a state in which a part of the connection portion 25 itself is inserted into an insertion hole 23 a provided in the rear of the housing 23.
- the connection portion 25 is connected to the pump 22 via, for example, a hose (not shown), and can introduce air supplied from the pump 22 into a flow path P1 formed in the connection portion 25.
- the flow path P1 of the connecting portion 25 is configured to be bent in the connecting portion 25 to form a substantially L shape.
- the nozzle 24 has a cylindrical portion 31 extending in the front-rear direction, and a disk (cylindrical) main body portion 32 provided in front of the cylindrical portion 31 and larger in diameter than the cylindrical portion 31. And.
- the cylindrical portion 31 of the nozzle 24 is rotatably supported in a state of being inserted in two insertion holes 23 a and 23 b provided in front of the connection portion 25 and provided in front and rear of the housing 23.
- the main body portion 32 is integral with the cylindrical portion 31.
- the main body 32 has an injection port 32 a capable of injecting the air (gas) supplied from the pump 22.
- the entire nozzle 24 is positioned above the on-vehicle optical sensor 10 (optical surface 11), and the nozzle 24 is prevented from facing the optical surface 11. Further, in the nozzle 24, a flow path P 2 provided across the cylindrical portion 31 and the main body portion 32 is formed.
- the flow path P1 of the connection portion 25 and the flow path P2 of the nozzle 24 are communicated with each other by arranging the rear portion of the cylindrical portion 31 opposite to the front of the connection portion 25. Therefore, the gas (air) supplied from the pump 22 is injected from the injection port 32a of the main body 32 of the nozzle 24 through the flow path P1 in the connection portion 25 and the flow path P2 in the nozzle 24. It has become.
- the flow path P2 of the nozzle 24 is bent in the main body 32 so as to form a substantially L shape, and the injection port 32a is directed downward in the vertical direction.
- An annular seal member S2 is provided at the rear end of the cylindrical portion 31 to seal the space between the cylindrical portion 31 and the insertion hole 23a.
- a seal member S3 is provided on the front side of the cylindrical portion 31 to seal between the cylindrical portion 31 and the insertion hole 23b. In this way, it is possible to suppress the entry of water or the like into the interior from between the insertion holes 23a and 23b and the cylindrical portion 31.
- the drive unit 26 as a pivoting mechanism has a motor 41 and a reduction mechanism 42 in a housing 23, and the nozzle 24 exposed from the housing 23 is driven by the rotational driving force of the motor 41. Rotate (rock).
- the reduction gear mechanism 42 includes a worm 41 b, a first gear 43, a second gear 44, and a worm wheel 31 a.
- the worm 41 b is formed on the output shaft 41 a of the motor 41 and is engaged with the worm wheel 43 a of the first gear 43.
- the worm 41 b (the output shaft 41 a of the motor 41) extends in the left-right direction which is the width direction of the on-vehicle optical sensor 10. Therefore, an increase in the size of the in-vehicle sensor cleaning device 20 in the front-rear direction, which is the sensing axial direction (detection direction) of the in-vehicle optical sensor 10, is suppressed.
- the first gear 43 meshing with the worm 41 b is integrally formed with the worm wheel 43 a, and a spur gear (not shown) coaxially rotating with the worm wheel 43 a meshes with the spur gear 44 a of the second gear 44.
- the second gear 44 is provided with a worm 44b which is integrally formed with the spur gear 44a and rotates coaxially with the spur gear 44a.
- the worm 44 b meshes with a worm wheel 31 a formed on the outer peripheral surface of the cylindrical portion 31 of the nozzle 24.
- the rotational driving force of the motor 41 is transmitted to the cylindrical portion 31 of the nozzle 24 by the reduction mechanism 42 so as to have a low rotational high torque, and the cylindrical portion 31 is rotated, and is integral with the cylindrical portion 31.
- the main body 32 is rotated to change the direction of the injection port 32a.
- the nozzle 24 is oscillated back and forth at a substantially constant speed over a predetermined range H (see FIG. 2) on the optical surface 11. That is, forward and reverse rotation of the motor 41 is switched.
- the nozzle 24 is rotated about a central axis (rotational axis) CL of the cylindrical portion 31.
- the central axis CL of the cylindrical portion 31 coincides with the central axis of the flow path P2 of the cylindrical portion 31. That is, the flow path P2 is set on the central axis line CL which is the rotation center of the cylindrical portion 31.
- guide wall portions 51 which are flush with the optical surface 11 are provided on the periphery of the nozzle 24 in the rotational direction and on both sides in the lateral direction of the nozzle 24.
- Each of the guide wall portions 51 is a surface on the front side of which a curved shape having substantially the same curvature as that of the optical surface 11 is formed.
- Each guide wall 51 is configured to be tapered as it is separated from the nozzle 24, and the shape of the front surface of the guide wall 51 is substantially triangular.
- the lower end portion of the guide wall portion 51 is parallel to the upper edge portion of the optical surface 11, and the lower end portion is substantially at the same position as the nozzle 24 in the vertical direction.
- the vertical height of the guide wall 51 in the vicinity of the nozzle 24 is substantially equal to the radius of the main body 32 of the nozzle 24.
- a nozzle cover 52 is provided in front of the nozzle 24 so as to cover the nozzle 24 and suppress the exposure of the nozzle 24 to the outside.
- the nozzle cover 52 is attached to the housing 23 by screws.
- the attachment method of the nozzle cover 52 may be other methods, such as a snap fit.
- the nozzle cover 52 is configured such that, for example, the front cover portion 52 a covering the nozzle 24 has a curved shape substantially similar to the curvature of the optical surface 11. Therefore, in the front cover portion 52a and the optical surface 11, the distances in the direction orthogonal to the optical surface 11 are substantially equal throughout the circumferential direction (the bending direction).
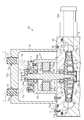
- the pump 22 can use, for example, a centrifugal pump.
- the configuration of the pump 22 will be described below with reference to FIG.
- the pump 22 of the present embodiment is an air pump, and includes a motor 61, a pump case 62, and an impeller 63.
- the motor 61 is, for example, a brushless motor, and includes a stator 65a fixed to the inner peripheral surface of a substantially bottomed cylindrical motor case 64, and a rotor 65b rotatably supported inside the stator 65a.
- the number of magnetic poles of the rotor 65b is four, and the number of slots between the teeth of the stator 65a is six.
- a central hole 64b is formed at the center of the bottom portion 64a (upper portion in FIG. 5) of the motor case 64, and the base end side (upper end in FIG. 5) of the rotary shaft 67 of the rotor 65b The side (the part closer to the bottom 64a) is supported.
- an annular sensor magnet 69 is provided via a fixing ring 68 made of resin at the base end (the upper end (the end near the bottom 64a) in FIG. 5) of the rotary shaft 67 projecting to the outside of the motor case 64. Is fixed.
- the circuit board 71 is fixed to the bottom portion 64 a of the motor case 64 via the fixing member 70. On the circuit board 71, various elements such as a rotation sensor 72 that detects the rotation (rotation angle, rotation speed, etc.) of the rotation shaft 67 facing the sensor magnet 69 are mounted.
- the pump case 62 is a first case 73 fixed so as to substantially close the open end of the motor case 64, and a second case fixed to the opposite side of the motor 61 (motor case 64) of the first case 73. And 74.
- a center hole 73a is formed at the center of the first case 73, and the tip end side (portion near the pump case 62) of the rotary shaft 67 is supported on the inner peripheral surface of the center hole 73a via a bearing 75.
- a circular recess 73 b is formed on the end face of the first case 73 near the second case 74 as viewed from the axial direction of the rotating shaft 67.
- a spiral chamber forming groove 73c is formed on the outer peripheral side of the recess 73b at the end face of the first case 73 near the second case 74.
- An air introducing hole 74 a is formed at the center of the second case 74.
- the air introduction hole 74a penetrates the second case 74 along the axial direction of the rotary shaft 67, and the diameter thereof is formed to be smaller as it goes to the motor 61 (first case 73).
- a circular recess 74b is formed when viewed from the axial direction of the rotating shaft 67, and the recess 74b together with the recess 73b of the first case 73 is an impeller accommodating portion W is configured.
- a spiral chamber forming groove 74c is formed on the outer peripheral side of the concave portion 74b at the end face of the second case 74 closer to the first case 73, and the spiral chamber forming groove 74c is together with the spiral chamber forming groove 73c of the first case 73.
- the swirl chamber U is configured.
- an air discharge cylindrical portion 74d in communication with the spiral chamber U located radially outside of the impeller housing portion W is formed in a part of the second case 74 in the circumferential direction.
- An annular seal groove 73d is formed in the mating surface of the first case 73 with the second case 74 at a position radially outward of the spiral chamber U, and the seal groove 73d is formed with the second case 74 in alignment.
- An annular seal member S4 which is clamped while being crushed by the surface is accommodated. This prevents the fluid (air) passing through the swirl chamber U from leaking from the mating surface.
- a substantially bottomed cylindrical sealing case 76 covering the entire motor 61 is fixed to the first case 73.
- the sealing case 76 has flange portions 76a extending outward in the radial direction at its opening end, and a plurality of locations (only one location is shown in FIG. 5) of the flanges 76a passes through the flanges 76a to form the first case It is fixed by a screw 77 screwed on 73.
- an annular seal groove 73e is formed in the mating surface of the first case 73 with the flange portion 76a, and an annular seal member S5 which is pinched and pinched by the mating surface of the flange portion 76a is formed in the seal groove 73e. It is housed.
- a wiring hole 76 c is formed in the bottom portion 76 b of the sealed case 76.
- a seal rubber member 79 for preventing the air from leaking from the wiring hole 76c is fitted in the wiring hole 76c while passing through the wiring 78.
- the wiring 78 electrically connects an external control device or power supply device to the circuit board 71 and the winding of the stator 65 a.
- the impeller 63 is fixed to be integrally rotatable with a tip end (a side end close to the pump case 62) of the rotary shaft 67 protruding into the impeller housing W, and is disposed in the impeller housing W.
- the impeller 63 has a plurality of flow passages 80 communicating the internal space of the axial center thereof with the external space (spiral chamber U) radially outward, and is rotated so as to introduce the fluid introduced from the air introduction hole 74a.
- the fluid As air from the inside space to the outside space (the swirl chamber U) through the flow passage 80, the fluid (air) is continuously jetted from the air discharge cylindrical portion 74d.
- the air discharge cylindrical portion 74d is connected to the connection portion 25 of the nozzle unit 21 through a hose (not shown) so that the fluid continuously supplied from the nozzle 24 (injection port 32a) is jetted. It becomes.
- the nozzle unit 21 of the in-vehicle sensor cleaning device 20 of the present embodiment is provided above the in-vehicle optical sensor 10 in the vertical direction. Then, by driving the pump 22, air supplied from the pump 22 is continuously jetted from the injection port 32a of the nozzle 24 through the flow paths P1 and P2.
- the motor 41 when the motor 41 is driven to rotate, the rotational driving force is transmitted to the nozzle 24 through the reduction mechanism 42, and the nozzle 24 is rotated. .
- the motor 41 is rotated in the forward and reverse directions so that the injection axis SL of the nozzle 24 swings back and forth on the optical surface 11.
- the nozzle 24 is provided at a position (upper side in the vertical direction) deviating from the position facing the optical surface 11, so the position of the ejection axis SL of the nozzle 24 is changed. As described above, even when the nozzle 24 is rotated, the nozzle 24 is not positioned on the optical surface 11. Thereby, the influence on the sensing of the in-vehicle sensor cleaning device 20 is suppressed.
- a nozzle 24 which rotates around a central axis line CL as a rotation axis extending in a direction perpendicular to the surface of the optical surface 11 in a state of being disposed at a position not facing the optical surface 11 (a position outside the sensing range). Since the air is jetted to the optical surface 11 by this, the nozzle 24 itself does not enter the sensing range. Therefore, the influence on sensing can be suppressed. Further, the fluid can be jetted to a wide range of the optical surface 11.
- the fluid By continuously supplying the fluid to the nozzle 24 by the pump 22, the fluid can be jetted to a wide range of the optical surface, and the cleaning effect can be enhanced.
- the fluid When the fluid is injected while changing the position of the injection axis, assuming that the piston pump (pump for intermittently discharging the fluid) is the pump 22, there is a time when the fluid is not injected, and the fluid is injected to a part of the optical surface
- fluid can be ejected from the nozzle 24 without interruption.
- the nozzle 24 can be configured by the single injection port 32a, complication of the structure of the nozzle 24 can be suppressed (simplified). Also, high pressure or large flow of fluid can be injected from the injection port 32a.
- the nozzle 24 By rotating the nozzle 24 in the forward and reverse directions, the nozzle 24 can be oscillated back and forth on the optical surface 11, and the fluid can be jetted to a necessary place (predetermined range H). (5) By rotating the nozzle 24 by the driving force of the drive unit 26, the nozzle 24 can be reliably rotated. In addition, the rotation axis of the nozzle 24 by the drive unit 26 changes the position of the injection axis of the injection port 32 a, so that the fluid can be injected to a wide range of the optical surface 11.
- the drive unit 26 includes the motor 41 as a drive source for driving to rotate and the reduction mechanism 42 for transmitting the driving force of the motor 41 to the nozzle 24 so that the nozzle 24 can be driven at low speed and high torque with respect to the motor 41. It becomes possible to turn. Further, since the rated output of the motor 41 can be reduced, a small motor can be employed.
- the nozzle cover 52 which covers the nozzle 24 in the range except injection axis SL of the air (fluid) injected from the nozzle 24 is provided. That is, the nozzle cover 52 does not extend to a position intersecting the injection axis SL. Therefore, it is possible to suppress the ejection of the fluid from the nozzle 24 while hiding the nozzle 24 by the nozzle cover 52. That is, it can be suppressed that the ejection of the fluid is inhibited due to the foreign matter adhering to the nozzle 24.
- the on-vehicle sensor cleaning device 90 uses a slide mechanism 92 capable of sliding the nozzle 91 (movable nozzle).
- the nozzle 91 has a connecting portion 91a connectable to the pump 22 at its rear portion, and the pump 22 is connected to the connecting portion 91a via a hole (not shown). Further, the nozzle 91 has a flow passage formed therein, and fluid (air) supplied from the pump 22 is injected from the injection port 91 b through the flow passage.
- the slide mechanism 92 includes two guide rails 94 a and 94 b supported by a housing 93, a plurality of pulleys 95 a to 95 e, and a wire 96 installed on the pulleys 95 a to 95 e. And a drive unit 97 for moving the wire 96 for rotationally driving the pulleys 95a to 95e.
- Each guide rail 94 a, 94 b is disposed along the optical surface 11 of the on-vehicle optical sensor 10.
- the guide rails 94 a and 94 b are juxtaposed in a state of being separated in the vertical direction, and both end portions in the left-right direction are supported by the housing 93.
- the drive unit 97 includes a motor 98 and a speed reduction mechanism 99.
- the speed reduction mechanism 99 includes a worm 100 provided on an output shaft 98 a of the motor 98 and a first gear 101 having a worm wheel 101 a engaged with the worm 100.
- the first gear 101 has a small diameter gear 101b that rotates integrally with the worm wheel 101a.
- the small diameter gear 101b meshes with a gear (not shown) that rotates integrally with the drum pulley 95a.
- the plurality of pulleys 95a to 95e have the drum pulley 95a, guide pulleys 95b and 95c, and two tension pulleys 95d and 95e.
- the drum pulley 95a is capable of winding the wire 96 and delivering the wire 96 by the rotation of the drum pulley 95a.
- the guide pulleys 95b and 95c are provided on both sides in the left-right direction so as to sandwich the drum pulley 95a.
- the respective tension pulleys 95d and 95e are provided between the drum pulley 95a and the guide pulleys 95b and 95c, and apply a suitable tension to the wire 96 so that the wire 96 is not slackened.
- the wire 96 is to be connected to the nozzle 91. Therefore, for example, by rotating the drum pulley 95a, the wire 96 is wound around the drum pulley 95a from one side in the left-right direction, and the wire 96 is fed from the drum pulley 95a to the other side in the left-right direction.
- the nozzle 91 is moved to slide along the guide rails 94a and 94b. Further, the wire 96 is provided between the guide rails 94a and 94b in the vertical direction. As a result, the wire 96 can be moved to stably move the nozzle 91 along the guide rails 94a and 94b.
- a nozzle cover 102 is provided in front of the nozzle 91 so as to cover the nozzle 91 to suppress external exposure.
- the nozzle cover 102 does not interfere in the movement range of the nozzle 91.
- direct impact of flying objects etc. in the movement range of the nozzle 91 is suppressed.
- the on-vehicle sensor cleaning device 90 configured as described above drives the pump 22 while sliding the nozzle 91 along the guide rails 94 a and 94 b of the slide mechanism 92 to drive the fluid from the ejection port 91 b of the nozzle 91.
- Spray (air) By this, the fluid can be jetted to a wide range of the optical surface 11.
- the on-vehicle sensor cleaning device 90 configured as described above exerts the following effects in addition to the effects (1) to (3) of the first embodiment. (13) A fluid can be jetted to a wide range of the optical surface 11 by changing the position of the jet axis SL of the jet port 91b by the slide movement along the optical surface 11.
- composition provided with a control part which changes movement speed (rotational speed) of injection axis SL of nozzle 24,91 may be adopted.
- a control example may be adopted in which the rotational speed of the nozzle 24 is reduced as the distance in the injection axis SL direction on the optical surface 11 increases. That is, as the region to be cleaned on the optical surface 11 is farther from the movable nozzle in the ejection axial direction, the rotational speed of the nozzle 24 may be reduced.
- An example in which such a control example is applied to the first embodiment is shown in FIG.
- the point D1 between the center and the left end of the swing range H of the nozzle 24 and the point D2 between the center and the left end of the swing range H are the most from the nozzle 24 in the optical surface 11 Positions at a long distance (positions passing both left and right end portions of the lower end circle of the optical surface 11).
- the drive unit 26 motor 41
- the rotational speed of the nozzle 24 decreases as the distance in the direction of the ejection axis SL on the optical surface 11 increases. It is possible to increase the injection time of the fluid to a site far from the difficult-to-reach nozzle 24.
- the rotational speed of the drive unit 26 controls the rotational speed of the injection axis SL on the optical surface 11, the rotational speed is changed from the difference in the portion where the fluid hardly reaches or the portion where the fluid easily reaches can do.
- the ejection priority on the optical surface 11 is set in advance, and the moving speed (rotational speed) of the nozzles 24 and 91 is reduced as the injection priority is higher, and the rotational speed of the nozzles 24 and 91 is adjusted as the priority is lower.
- An example of control to increase may be adopted.
- the priority setting method may be arbitrarily changed by the user, or may be appropriately set according to, for example, the positions of the light emitting unit and the light receiving unit in the in-vehicle sensor cleaning device. As described above, by controlling the motors 41 and 98 so as to make the moving speed (rotational speed) of the nozzles 24 and 91 slower as the area where the injection priority is higher, the fluid is suitably applied to the part where the priority is high. It can be injected.
- the nozzles 24 and 91 capable of ejecting air as a fluid are provided.
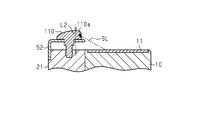
- the present invention is not limited thereto. For example, even if a configuration including a liquid nozzle capable of ejecting a liquid as a fluid is adopted. Good. An example in which such a configuration is applied to the first embodiment is shown in FIG. 9 to FIG.
- one liquid nozzle 110 is provided on each side of the nozzle 24 in the left-right direction. Unlike the nozzle 24, the liquid nozzle 110 has a non-rotatable structure.
- the liquid nozzle 110 has an injection port 110a, and is connected to a liquid pump 111 different from the pump 22 so that liquid can be ejected from the injection port 110a.
- a washer liquid for cleaning a front window of a vehicle and the like can be mentioned.
- Each liquid nozzle 110 is configured to protrude forward than the nozzle cover 52 and be exposed to the outside. As shown in FIGS. 12 and 13, in each liquid nozzle 110, the amount L2 of protrusion projecting in the direction orthogonal to the surface from the optical surface 11 is larger than the amount L1 of protrusion projecting in the direction orthogonal to the surface from the optical surface 11 of the nozzle 24. ing. In other words, the projection amount L1 of the nozzle 24 which protrudes in the surface orthogonal direction from the optical surface 11 is smaller than the projection amount L2 which protrudes in the surface orthogonal direction from the optical surface of the liquid nozzle.
- the ejection axis SL of the nozzle 24 can be made relatively parallel to the optical surface 11, and the ejection axis SL of the liquid nozzle 110 is relatively predetermined relative to the optical surface 11. It can be inclined to have an angle of
- the fluid (air) can be jetted to the area corresponding to the liquid nozzle 110 by the rotating nozzles 24. And since the amount L1 of protrusion which protrudes in the surface orthogonal direction from the optical surface 11 is smaller than the amount L2 of protrusion which protrudes in the surface orthogonal direction from the optical surface 11, the nozzle 24 Thus, foreign matter such as water droplets adhering to the optical surface 11 can be blown away.
- the liquid (washer liquid) ejected from the liquid nozzle 110 may collide with the optical surface 11 and be diffused. As a result, the liquid can be supplied to the wide area of the optical surface 11 and the wide area of the optical surface 11 can be cleaned.
- liquid nozzles 110 may be changed to one or three or more.
- the arrangement of the nozzles 110 is not limited to the arrangement in which the nozzles 24 are sandwiched, and can be appropriately changed.
- a configuration in which a plurality of nozzles 24 are provided only on one side in the left-right direction may be employed.
- the number may differ between the liquid nozzles 110 provided on one side of the nozzles 24 and the liquid nozzles 110 provided on the other side of the nozzles 24.
- the liquid nozzle 110 was provided in addition to the nozzle 24 in the said example, the air nozzle which injects gas (air) irrespective of the liquid nozzle 110 may be sufficient.
- the liquid nozzle at a position not interfering with the movement range of the nozzle 91.
- one nozzle 24 or 91 as the movable nozzle is provided.
- a plurality of the nozzles may be provided. An example in which such a configuration is applied to the first embodiment is shown in FIG.
- the on-vehicle sensor cleaning device 20 has three nozzles 24.
- the nozzle 24 is supplied with fluid (air) from the pump 22 via the flow path switching unit 120.
- the flow path switching unit 120 switches the flow path between the pump 22 and each nozzle 24 so that fluid is sequentially ejected from the three nozzles 24.
- fluid is sequentially ejected from the nozzles 24.
- the three nozzles 24 are connected to the drive unit 26 so as to be rotated.
- the drive unit 26 that rotates the three nozzles 24 a configuration may be adopted in which the driving force of one drive source (motor 41) is transmitted to each nozzle 24 to rotate the nozzles 24. .
- the nozzle 24 as the movable nozzle is provided with the single injection port 32a.
- the present invention is not limited to this, and a plurality of injection ports may be provided. A configuration having a plurality of injection ports will be described as an example applied to the first embodiment with reference to FIGS. 16 to 18.
- the nozzle 24 (main body 32) has two injection ports 32a and 32b.
- the injection ports 32 a and 32 b are formed on the opposite side of the nozzle 24 in the circumferential direction 180 degrees.
- a regulation wall 130 covering a range of 180 degrees in the circumferential direction of the nozzle 24 is provided around the main body 32 of the nozzle 24.
- the restricting wall portion 130 always faces one of the two injection ports 32a and 32b during rotation of the nozzle 24, and restricts the injection of fluid from the opposed injection ports 32a and 32b.
- the portion which is not covered by regulation wall part 130 has become the range which can actually jet fluid to optical surface 11.
- the control range of the injection of the fluid by the control wall portion 130 is outside the area that allows the injection of the fluid to the optical surface 11.
- one of the two injection ports 32a and 32b is exposed to the outside by rotating the nozzle 24 in one direction. It becomes a state and can jet fluid.
- the injection of the fluid from the injection ports 32 a and 32 b is restricted at the portion covered by the restriction wall portion 130.
- the restriction wall portion 130 is not limited to the configuration in which the plurality of injection ports 32a and 32b are provided, but may be applied to a nozzle in which a single injection port is provided. In addition, it is possible to adopt a configuration in which the control wall portion 130 is provided for the nozzle that is reciprocated by being rotated forward and reverse not only in one direction but also in one direction. Moreover, although it was set as the structure which covers the range of the circumferential direction 180 degree
- the nozzle unit 21 (nozzles 24, 91) constituting the in-vehicle sensor cleaning device 20 is provided above the in-vehicle optical sensor 10 in the vertical direction, but the nozzle unit 21 (nozzles 24, 91) is You may employ
- the nozzle covers 52 and 102 covering the nozzles 24 and 91 are provided.
- the configurations in which the covers 52 and 102 are omitted may be employed.
- the optical surface 11 has a curved shape (curved surface).
- the present invention is not limited to this.
- the optical surface 11 may have a planar shape.
- the drive units 26 and 97 are configured by the single motors 41 and 98 and the reduction mechanisms 42 and 99, but the invention is not limited thereto.
- a configuration may be employed in which the reduction mechanisms 42 and 99 are omitted.
- the configuration of the reduction mechanisms 42 and 99 that is, the number of gears and the reduction ratio can be changed as appropriate.
- the guide wall 51 having a curved shape flush with the optical surface 11 is provided.
- the present invention is not limited to this. A configuration in which the optical surface 11 and the guide wall 51 are not flush may be employed.
- the guide wall 51 may have a planar shape with respect to the curved optical surface 11. Moreover, you may employ
- the nozzle 24 is rotated by the rotational driving force of the motor 41 of the drive unit 26.
- the nozzle 24 is rotated (oscillated) by the supply of fluid. May be adopted.
- the flow path P2 capable of introducing the fluid (air) to the rotation center (central axis line CL) of the nozzle 24 is provided.
- the present invention is not limited thereto. You may employ
- a centrifugal pump is employed as the pump 22.
- the pump is not limited to this, and a pump capable of continuously supplying fluid such as an axial flow or diagonal flow pump, a diaphragm pump or a screw pump may be employed. Good.
- the slide mechanism 92 is configured to include the plurality of pulleys 95a to 95e and the wire 96 installed around the pulleys 95a to 95e, but the present invention is not limited thereto.
- the slide mechanism 140 shown in FIG. 19 is configured to use a slider crank.
- the slide mechanism 140 includes two guide rails 142 a and 142 b provided in the housing 141, a slider crank 143, and a drive unit 144 that drives the slider crank 143.
- the guide rails 142a and 142b are juxtaposed along the optical surface 11, and have a curved shape that is substantially equal to the curvature of the optical surface 11.
- a nozzle 145 is slidably provided on each of the guide rails 142a and 142b.
- the drive unit 144 includes a motor 146 and a speed reduction mechanism 147.
- the reduction mechanism 147 includes a worm 148 provided on an output shaft 146 a of the motor 146 and a worm wheel 149 meshing with the worm 148.
- the slider crank 143 includes a link 150 connected at a position shifted radially outward from the rotation center of the worm wheel 149 and a slider 151 connected to the link 150.
- the link 150 is connected at its proximal end to the worm wheel 149 and at its distal end to the proximal end of the slider 151.
- the slider 151 has a proximal end connected to the link 150 and a distal end slidably connected to a long hole 145 a provided in the nozzle 145.
- the slider 151 is supported so as to be capable of rotating (pivoting) by a support shaft 151a set between the end portions.
- the motor 146 when the motor 146 is rotationally driven, the rotational driving force is transmitted, and the slider 151 is rotated about the support shaft 151a.
- the center of curvature of the support shaft 151a which is the swing center (rotation center) of the slider 151, and the guide rails 142a and 142b are offset. Therefore, normally, even if the slider 151 is swung, it is difficult to swing the nozzle 145 along the guide rails 142a and 142b.
- the movement of the tip of the slider 151 is allowed in the longitudinal direction of the long hole 145a, and the nozzle 145 is swung along the guide rails 142a and 142b. It has become possible.
- the on-vehicle optical sensor 10 (for example, LIDAR or camera) which is an optical sensor is adopted as the on-vehicle sensor, but the invention is not limited thereto.
- Other on-vehicle sensors a radar using radio waves (for example, a millimeter wave radar) or an ultrasonic sensor used as a corner sensor
- the on-vehicle optical sensor 10 may be adopted as the on-vehicle sensor.
- the gas is jetted from the nozzle 24 and the liquid (washer liquid) is jetted from the liquid nozzle 110, but the combination of these may be changed as appropriate. That is, a configuration may be employed in which the liquid is ejected from the rotating nozzle 24 and the gas is ejected from the nozzle 110. In addition, a configuration in which only the liquid is ejected from each of the nozzles 24 and 110 or a configuration in which only the gas is ejected from each of the nozzles 24 and 110 may be adopted.
- the nozzle 24 has a configuration in which the projection amount L1 projecting in the surface orthogonal direction from the optical surface 11 is smaller than the projection amount L2 projecting in the surface orthogonal direction from the optical surface 11 of the liquid nozzle 110. And, but it is not limited to this.
- the protrusion amounts L1 and L2 of the nozzle 24 and the liquid nozzle 110 may be the same.
- a configuration in which the protrusion amount L1 of the nozzle 24 is smaller than the protrusion amount L2 of the liquid nozzle 110 may be employed.
- the on-vehicle sensor cleaning device 20 includes a nozzle unit 21 stacked and disposed above (on the upper side in the vertical direction) the on-vehicle optical sensor 10 and a pump 22 that supplies fluid to the nozzle unit 21. (See FIG. 1).
- the nozzle unit 21 includes a housing 23, a nozzle 24 as a movable nozzle provided so as to expose at least a part of the housing forward, a connection portion 25 provided between the nozzle 24 and the pump 22, and a housing And a drive 26 housed within the body 23.
- the drive unit 26 includes a motor 181 and a driving force transmission mechanism 182 for transmitting the driving force of the motor 181 in the housing 23.
- the driving force transmission mechanism 182 includes a speed reduction unit 183, a first motion converter 186, and a second motion converter 191.
- the speed reduction unit 183 has a worm 184 and a first gear 185.
- the worm 184 is formed on the output shaft 181 a of the motor 181 and is engaged with the worm wheel 185 a of the first gear 185.
- the first gear 185 is integrally formed with the worm wheel 185 a and integrally rotates coaxially with the worm wheel 185 a and has a spur gear 185 b smaller in diameter than the worm wheel 185 a, and the spur gear 185 b meshes with the second gear 187. .
- the first motion converter 186 is a so-called reciprocating slider-crank mechanism that converts circular motion (rotational motion) into reciprocating linear motion
- the second gear 187 and the second gear A rod member 188 is connected to one end of the rod member 187, and a slider member 189 is connected to the other end of the rod member 188.
- the second gear 187 is configured by a spur gear.
- One end of a rod member 188 constituting the first motion converter 186 is connected to the axial end surface 187 a of the second gear 187 at a position away from the rotation center of the second gear 187. That is, the second gear 187 acts as a crank of the reciprocating slider-crank mechanism.
- the other end of the rod member 188 is connected to one end of the slider member 189.
- the slider member 189 is supported by a linear guide member 190 extending in the left-right direction, and is capable of reciprocating linear movement along the guide member 190.
- the driving force is transmitted to the slider member 189 via the rod member 188.
- the slider member 189 reciprocates linearly along the guide member 190 by the transmitted driving force.
- the second motion converter 191 converts reciprocating linear motion into circular motion, and in this example, a rack and pinion is used. More specifically, the second motion converter 191 includes the slider member 189 and a pinion gear 192.
- the slider member 189 corresponds to a rack
- the pinion gear portion 192 corresponds to a pinion. That is, the slider member 189 constitutes both the first motion converter 186 and the second motion converter 191 (parts of both).
- the slider member 189 has a tooth portion 189a formed on the surface thereof.
- the tooth portion 189 a of the slider member 189 meshes with a pinion gear portion 192 formed on the outer peripheral surface of the cylindrical portion 31 of the nozzle 24. That is, when the slider member 189 reciprocates linearly, the pinion gear portion 192 meshing with the tooth portion 189a of the slider member 189 rotates, and the nozzle 24 rotates. At this time, since the slider member 189 reciprocates linearly, when the slider member 189 moves forward, the pinion gear portion 192 and the nozzle 24 rotate in one direction, and the slider member 189 returns. The pinion gear portion 192 and the nozzle 24 rotate in the other direction. Thus, the nozzle 24 rotates so as to change the direction of the injection port 32a in the predetermined range H (see FIG. 22).
- the operation of the in-vehicle sensor cleaning device 20 will be described.
- the motor 181 is driven to rotate
- the nozzle unit 21 of the in-vehicle sensor cleaning device 20 of the present embodiment is converted into low-speed high-torque rotation by the speed reduction unit 183.
- the rotational motion is converted into the reciprocating linear motion by the first motion converter 186.
- the reciprocating linear motion is converted to rotational motion (reciprocal rotational motion) by the second motion converter 191, and the rotational driving force is transmitted to the nozzle 24.
- the nozzle 24 is rotated within the predetermined range H.
- the rotational speed of the nozzle 24 changes in the same manner as a sine wave. More specifically, as shown in FIG. 23, the rotational speed of the nozzle 24 is the slowest at the position where forward and reverse rotation of the nozzle 24 switches (the position where reciprocation switches), and the injection axis SL of the nozzle 24 is positioned at the center At the same time, the rotational speed of the nozzle 24 is the highest.
- the optical surface 11 is a surface which is convex forward and has a curved shape as viewed in the vertical direction. For this reason, the change rate of the curved surface of the optical surface 11 with respect to the injection axis SL on a straight line is larger in the portion where the normal and reverse rotations of the nozzle 24 are switched than in other portions. For this reason, as described above, the target portion of the optical surface 11 can be efficiently cleaned by reducing the speed of the nozzle 24 at the portion where the forward and reverse rotation of the nozzle 24 switches.
- the forward and reverse rotation of the motor 181 is switched by providing the first motion converting unit 186 and the second motion converting unit 191 as conversion mechanisms for converting the rotational movement of the motor 181 in one direction into reciprocating rotational movement.
- the nozzle 24 can be reciprocated and rotated (reciprocally rotated) within a predetermined range. Once the rotational movement is converted to reciprocating linear movement by the first movement converting unit 186, when converting the reciprocating linear movement to rotational movement by the second movement converting unit 191, it naturally becomes reciprocating rotational movement.
- the nozzle 24 can be reciprocated and rotated (reciprocally rotated) within a predetermined range without switching the rotation.
- the third embodiment may be modified as follows.
- the rotational speed of the nozzle 24 is controlled by controlling the rotational speed of the drive unit 26 (motor 41) to control the injection axis SL on the optical surface 11 You may employ
- a so-called reciprocating slider / crank mechanism is used as the first motion converter 186.
- the present invention is not limited to this.
- the configuration shown in FIG. 24 or the configurations shown in FIGS. 25 and 26 may be adopted.
- the first motion converter is integrally formed with the worm wheel 185a of the reduction gear 183 and integrally rotates coaxially with the worm wheel 185a, and has a small diameter gear 201 smaller in diameter than the worm wheel 185a, A slider member 202 engaged with the gear 201 is provided.
- the small diameter gear 201 is configured by providing a total of three tooth portions 201a having two gear teeth 201b at equal intervals in the circumferential direction.
- the slider member 202 is supported so as to reciprocate in a cylinder 203 a integrally formed with the motor housing portion 203.
- the motor housing portion 203 constitutes, for example, a part of the housing 23 and houses the motor 181.
- the slider member 202 has a tooth portion 202a formed on one end side thereof for meshing with the gear teeth 201b of the tooth portion 201a, and a tooth portion 202b formed on the other end side for meshing with the pinion gear portion 192. Further, a flange portion 202c is formed at an intermediate position in the longitudinal direction of the slider member 202 and at a portion accommodated (inserted) in the cylinder 203a. A spring 204 is provided between the flange portion 202c and the bottom portion 203b of the cylinder 203a. The spring 204 biases the flange portion 202c toward the opening 203c opposite to the bottom portion 203b of the cylinder 203a.
- the small diameter gear 201 is rotated in one direction.
- the slider 202 moves in the direction opposite to the biasing direction of the spring 204 against the biasing force of the spring 204.
- the axial end surface 205 of the worm wheel 185a is provided with a spring support portion 205a for supporting one end of the spring 207.
- a spring support portion 206a for supporting the other end of the spring 207 is provided between the spring support portion 205a and the motor accommodation portion 206 which constitutes a part of the housing 23 and accommodates the motor 181 and the like. As a result, a biasing force is generated by the spring 207 in the direction opposite to the driving direction of the motor 181.
- the small diameter gear 208 which is integrally formed with the worm wheel 185a and integrally rotates coaxially with the worm wheel 185a and which has a diameter smaller than that of the worm wheel 185a is formed by helical teeth (worm wheel).
- the worm wheel 185 a meshes with a worm 209 formed on the cylindrical portion 31 of the nozzle 24.
- the nozzle 24 is rotated in one direction by rotationally driving the output shaft 181a of the motor 181 in one direction against the biasing force of the spring 207, and the operation of the motor 181 is stopped by the biasing force of the spring 207. It turns in the other direction.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Water Supply & Treatment (AREA)
- Nozzles (AREA)
Abstract
L'invention concerne un dispositif de nettoyage de capteur embarqué disposé sur un capteur embarqué qui comprend une surface de détection. Le dispositif de nettoyage de capteur embarqué comprend un orifice d'éjection qui, lorsqu'il est disposé à l'extérieur de la plage de détection du capteur embarqué, projette un liquide vers la surface de détection. Le dispositif de nettoyage de capteur embarqué comprend également une buse mobile qui peut amener l'orifice d'éjection à se déplacer de telle sorte que la position axiale d'éjection de l'orifice d'éjection soit modifiée.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880051437.4A CN111225838B (zh) | 2017-08-15 | 2018-05-23 | 车载传感器清洗装置 |
| DE112018004171.9T DE112018004171T5 (de) | 2017-08-15 | 2018-05-23 | Reinigungsvorrichtung für einen bordeigenen Sensor |
| US16/628,242 US11679422B2 (en) | 2017-08-15 | 2018-05-23 | On-board sensor cleaning device |
Applications Claiming Priority (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-156863 | 2017-08-15 | ||
| JP2017156863 | 2017-08-15 | ||
| JP2017-166721 | 2017-08-31 | ||
| JP2017166721A JP7020001B2 (ja) | 2017-08-31 | 2017-08-31 | 車載センサ洗浄装置 |
| JP2018020077A JP7130975B2 (ja) | 2017-08-15 | 2018-02-07 | 車載センサ洗浄装置 |
| JP2018-020077 | 2018-02-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019035255A1 true WO2019035255A1 (fr) | 2019-02-21 |
Family
ID=65362233
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/019808 WO2019035255A1 (fr) | 2017-08-15 | 2018-05-23 | Dispositif de nettoyage de capteur embarqué |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2019035255A1 (fr) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020152325A (ja) * | 2019-03-22 | 2020-09-24 | 株式会社東海理化電機製作所 | 車両用視認装置 |
| CN112718665A (zh) * | 2020-12-29 | 2021-04-30 | 苏州星格纳测控技术有限公司 | 一种便于清洁的轴式传感器及其清洁装置 |
| WO2022013240A1 (fr) * | 2020-07-14 | 2022-01-20 | Bayerische Motoren Werke Aktiengesellschaft | Dispositif de pompe d'un système d'eau d'essuie-glace d'un véhicule et système d'eau d'essuie-glace d'un véhicule équipé d'un tel dispositif de pompe |
| FR3117970A3 (fr) * | 2020-12-23 | 2022-06-24 | Compagnie Plastic Omnium Se | Pièce de carrosserie de véhicule automobile muni d’un système de nettoyage |
| WO2023068050A1 (fr) * | 2021-10-20 | 2023-04-27 | 株式会社小糸製作所 | Système de dispositif de nettoyage |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09148295A (ja) * | 1995-11-27 | 1997-06-06 | Dainippon Screen Mfg Co Ltd | 回転式基板処理装置 |
| JP2014019403A (ja) * | 2012-07-23 | 2014-02-03 | Denso Corp | 車載光学センサ用洗浄装置 |
| JP2015029956A (ja) * | 2013-08-02 | 2015-02-16 | 株式会社丸島アクアシステム | 多段式散気装置 |
| JP2017513772A (ja) * | 2014-04-11 | 2017-06-01 | ディエルエイチ・ボウルズ・インコーポレイテッドdlhBOWLES Inc. | 広角イメージセンサ外面清掃用、統合的自動車システムとしてのコンパクト薄型ノズルアセンブリとコンパクト流体回路 |
-
2018
- 2018-05-23 WO PCT/JP2018/019808 patent/WO2019035255A1/fr active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09148295A (ja) * | 1995-11-27 | 1997-06-06 | Dainippon Screen Mfg Co Ltd | 回転式基板処理装置 |
| JP2014019403A (ja) * | 2012-07-23 | 2014-02-03 | Denso Corp | 車載光学センサ用洗浄装置 |
| JP2015029956A (ja) * | 2013-08-02 | 2015-02-16 | 株式会社丸島アクアシステム | 多段式散気装置 |
| JP2017513772A (ja) * | 2014-04-11 | 2017-06-01 | ディエルエイチ・ボウルズ・インコーポレイテッドdlhBOWLES Inc. | 広角イメージセンサ外面清掃用、統合的自動車システムとしてのコンパクト薄型ノズルアセンブリとコンパクト流体回路 |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020152325A (ja) * | 2019-03-22 | 2020-09-24 | 株式会社東海理化電機製作所 | 車両用視認装置 |
| JP7230310B2 (ja) | 2019-03-22 | 2023-03-01 | 株式会社東海理化電機製作所 | 車両用視認装置 |
| WO2022013240A1 (fr) * | 2020-07-14 | 2022-01-20 | Bayerische Motoren Werke Aktiengesellschaft | Dispositif de pompe d'un système d'eau d'essuie-glace d'un véhicule et système d'eau d'essuie-glace d'un véhicule équipé d'un tel dispositif de pompe |
| FR3117970A3 (fr) * | 2020-12-23 | 2022-06-24 | Compagnie Plastic Omnium Se | Pièce de carrosserie de véhicule automobile muni d’un système de nettoyage |
| CN112718665A (zh) * | 2020-12-29 | 2021-04-30 | 苏州星格纳测控技术有限公司 | 一种便于清洁的轴式传感器及其清洁装置 |
| WO2023068050A1 (fr) * | 2021-10-20 | 2023-04-27 | 株式会社小糸製作所 | Système de dispositif de nettoyage |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2019035255A1 (fr) | Dispositif de nettoyage de capteur embarqué | |
| CN111225838B (zh) | 车载传感器清洗装置 | |
| WO2019106930A1 (fr) | Dispositif de nettoyage de capteur embarqué | |
| JP7130975B2 (ja) | 車載センサ洗浄装置 | |
| US20060167342A1 (en) | Endoscope having a rotatable distal endoscope head | |
| JP2019001447A (ja) | 車載センサ洗浄装置 | |
| JP2017119480A (ja) | 付着物除去装置 | |
| JP2019043270A (ja) | 車載センサ洗浄装置 | |
| CN110869253A (zh) | 车载传感器清洗装置 | |
| US20130008979A1 (en) | Rotating nozzle system | |
| JP2019156260A (ja) | 車両用クリーナノズルおよび車両用クリーナノズルの組み付け方法 | |
| JP2016215839A (ja) | 車載光学センサ取付ブラケット、及び車載光学センサユニット | |
| US20190077378A1 (en) | Device for cleaning an optical detection system for a motor vehicle | |
| WO2019012882A1 (fr) | Dispositif de nettoyage de capteur embarqué | |
| WO2018225343A1 (fr) | Dispositif de nettoyage de capteur embarqué | |
| JP2019051789A (ja) | 車載センサ洗浄装置 | |
| KR101231256B1 (ko) | 분수대의 멀티스윙 노즐장치 | |
| US20110139907A1 (en) | Tank-cleaning nozzle | |
| JP2019038511A (ja) | 車載センサ洗浄装置 | |
| WO2018225342A1 (fr) | Dispositif de pompe électrique | |
| JP2014144502A (ja) | 切削液供給装置 | |
| JP6148470B2 (ja) | 車両用ウォッシャポンプ装置 | |
| KR101531705B1 (ko) | 다자유도 분수노즐장치 | |
| KR20080099369A (ko) | 분무기 | |
| US20190145411A1 (en) | Gas ejection apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18846070 Country of ref document: EP Kind code of ref document: A1 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18846070 Country of ref document: EP Kind code of ref document: A1 |