WO2018235343A1 - 電動パワーステアリング装置およびそれを搭載した車両 - Google Patents
電動パワーステアリング装置およびそれを搭載した車両 Download PDFInfo
- Publication number
- WO2018235343A1 WO2018235343A1 PCT/JP2018/007451 JP2018007451W WO2018235343A1 WO 2018235343 A1 WO2018235343 A1 WO 2018235343A1 JP 2018007451 W JP2018007451 W JP 2018007451W WO 2018235343 A1 WO2018235343 A1 WO 2018235343A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- steering
- motor
- electric power
- rear wheel
- front wheel
- Prior art date
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/15—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels
- B62D7/1518—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels comprising a mechanical interconnecting system between the steering control means of the different axles
- B62D7/1545—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels comprising a mechanical interconnecting system between the steering control means of the different axles provided with electrical assistance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0457—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such
- B62D5/0481—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures
- B62D5/0484—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by control features of the drive means as such monitoring the steering system, e.g. failures for reaction to failures, e.g. limp home
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D7/00—Steering linkage; Stub axles or their mountings
- B62D7/06—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins
- B62D7/14—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering
- B62D7/15—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels
- B62D7/1581—Steering linkage; Stub axles or their mountings for individually-pivoted wheels, e.g. on king-pins the pivotal axes being situated in more than one plane transverse to the longitudinal centre line of the vehicle, e.g. all-wheel steering characterised by means varying the ratio between the steering angles of the steered wheels characterised by comprising an electrical interconnecting system between the steering control means of the different axles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/16—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the circuit arrangement or by the kind of wiring
- H02P25/22—Multiple windings; Windings for more than three phases
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0418—Electric motor acting on road wheel carriers
Definitions
- the present application relates to an electric power steering apparatus having steering mechanisms independent of one another for four wheels of a vehicle, and a vehicle equipped with the same.
- Patent Document 1 In a conventional electric power steering apparatus having steering mechanisms independent of one another for four wheels of a vehicle, a backup function is not provided when a steering motor constituting the steering mechanism breaks down (for example, Patent Document 1) reference).
- the present application has been made to solve the above-mentioned problems. Even if the steering motor fails, the function of the steering mechanism of the relevant wheel can be continued, and the maneuverability and stability of the vehicle are ensured. It is an object of the present invention to obtain an electric power steering apparatus that can
- the electric power steering apparatus disclosed in the present application is an electric power steering apparatus having a steering mechanism independent of each of four wheels of a vehicle, in which a steering motor of the steering mechanism is redundantly configured.
- FIG. 1 is a system configuration diagram showing an electric power steering apparatus according to Embodiment 1.
- FIG. 2 is a circuit diagram of a steering motor of a steering mechanism used in the electric power steering apparatus according to Embodiment 1.
- FIG. 2 is a diagram illustrating an example of hardware of a control device according to the first embodiment.
- FIG. 1 is a system configuration diagram showing an electric power steering apparatus according to a first embodiment
- FIG. 2 is a circuit diagram of a steering motor of a steering mechanism used in the electric power steering apparatus according to the first embodiment.
- a steering shaft 6 is connected to a steering wheel 5 operated by a driver, and a steering reaction force is applied to the steering shaft 6 for a steering sensor 7 detecting a steering angle of the driver and steering of the driver.
- a reaction force motor 8 is attached, and the steering input mechanism 2 is constituted by the steering wheel 5, the steering shaft 6, the steering sensor 7, and the reaction force motor 8.
- a left front wheel tie rod 11a connected to the left front wheel rack shaft 12a is connected to the left front wheel knuckle arm 10a of the left front wheel 9a, and movement of the left front wheel rack shaft 12a is the left front wheel tie rod 11a
- the left front wheel 9a is steered by being transmitted to the left front wheel 9a via the front wheel knuckle arm 10a.
- the left front wheel steering motor 13a is attached to the left front wheel rack shaft 12a, and the output of the left front wheel steering motor 13a is the power to move the left front wheel rack shaft 12a.
- the left front wheel steering mechanism 3a is formed by a mechanism around the axis.
- the right front wheel tie rod 11b connected to the right front wheel rack shaft 12b is connected to the right front wheel knuckle arm 10b of the right front wheel 9b, and the movement of the right front wheel rack shaft 12b corresponds to the right front wheel tie rod 11b.
- the right front wheel 9b is steered by being transmitted to the right front wheel 9b via the right front wheel knuckle arm 10b.
- the right front wheel steering motor 13b is attached to the right front wheel rack shaft 12b, and the output of the right front wheel steering motor 13b is the power to move the right front wheel rack shaft 12b.
- the left rear wheel tie rod 16a connected to the left rear wheel rack shaft 17a is connected to the left rear wheel knuckle arm 15a of the left rear wheel 14a, and the movement of the left rear wheel rack shaft 17a is the left rear wheel
- the left rear wheel 14a is steered by being transmitted to the left rear wheel 14a via the tie rod 16a and the left rear wheel knuckle arm 15a.
- the left rear wheel steering motor 18a is attached to the left rear wheel rack shaft 17a, and the output of the left rear wheel steering motor 18a is the power to move the left rear wheel rack shaft 17a.
- the left rear wheel steering mechanism 4a is formed by the mechanism around the left rear wheel rack shaft.
- the right rear wheel tie rod 16b connected to the right rear wheel rack shaft 17b is connected to the right rear wheel knuckle arm 15b of the right rear wheel 14b, and movement of the right rear wheel rack shaft 17b
- the right rear wheel 14b is steered by being transmitted to the right rear wheel 14b via the right rear wheel tie rod 16b and the right rear wheel knuckle arm 15b.
- the right rear wheel steering motor 18b is attached to the right rear wheel rack shaft 17b, and the output of the right rear wheel steering motor 18b is the power to move the right rear wheel rack shaft 17b.
- the right rear wheel steering mechanism 4b is formed by the mechanism around the right rear wheel rack shaft.
- the steering input mechanism 2 and the steering mechanisms 3a, 3b, 4a, 4b are not mechanically connected, and the control device 26 controls the left front wheel steering motor 13a based on input signals from the steering sensor 7 or the like.
- the right front wheel steering motor 13b By appropriately controlling the right front wheel steering motor 13b, the reaction force motor 8, the left rear wheel steering motor 18a, and the right rear wheel steering motor 18b, steering according to the driver's operation is performed.
- a so-called steer-by-wire type electric power steering apparatus 1 is formed.
- the left front wheel 9a is for the left front wheel drive 27a
- the right front wheel 9b is for the right front wheel drive 27b
- the left rear wheel 14a is for the left rear wheel drive 28a
- the right rear wheel 14b is for the right rear wheel
- the driving devices 28 b are provided independently of one another, and are configured to individually supply a driving force to the respective wheels.
- the steering mechanisms of the four wheels of the vehicle 29 are independent, and the steering angles of the four wheels can be freely controlled according to the traveling state, and the driving forces of the four wheels are also freely controlled.
- the vehicle can be realized with high maneuverability and stable behavior.
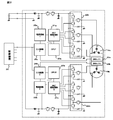
- each of the steering motors 13a, 13b, 18a and 18b has a double inverter type three-phase duplexing having two sets of three-phase windings and two sets of inverters for individually driving the respective three-phase windings. It is a motor and is configured not to completely lose its function as a motor even when a failure occurs.
- the steering motor is provided with two three-phase windings 19a, 19b.
- the connection terminals U1, V1, W1 of the three-phase winding 19a of the first system are connected to the CPU 20a and the first inverter 22a controlled by the FET drive circuit 21a.
- the connection terminals U2, V2, W2 of the three-phase winding 19b of the second system are connected to the CPU 20b and a second inverter 22b controlled by the FET drive circuit 21b.
- the signal of the rotation sensor 23a for detecting the rotation of the rotor of the steering motor is input to the input circuit 24a of the first system and provided for control of the motor. Power is supplied from the power supply circuit 25a to the CPU 20a, the FET drive circuit 21a, and the input circuit 24a. The power supply of the vehicle is connected to the first inverter 22a, and power for driving the motor is supplied.
- the signal of the rotation sensor 23b is input to the input circuit 24b of the second system and provided for control of the motor.
- Power is supplied from the power supply circuit 25b to the CPU 20b, the FET drive circuit 21b, and the input circuit 24b.
- the power supply of the vehicle is connected to the second inverter 22b, and power for driving the motor is supplied.
- the input circuit 24a and the input circuit 24b are connected to the control device 26, and are configured to control the motor in coordination with the other three steering motors, the reaction force motor 8 and the other vehicle system.
- the torque exerted by the second system is 0, and the output torque of the whole motor is half of the normal one, the torque of the first system does not completely lose its function, and the steering is controlled. It can continue.
- the CPU 20b transmits failure information to the control device 26 via the input circuit 24b, and the control of the other three steering motors 13a, 13b, 18b, the reaction force motor 8, and other vehicle systems is appropriately performed. Let's do it.
- the torque exerted by the first system is also doubled, and by the second system
- the output torque of the entire motor can be made to be the same as that in the normal state by compensating for the torque that has been exerted.
- the steering angle of the left rear wheel may be returned to the neutral position and fixed by the first system, and thereafter steering may be performed only with the front wheels.
- the steering angle of the normal right rear wheel is also returned to the neutral position and fixed.
- the drivability reduced by fixing the turning angle at the neutral position may be compensated by controlling the driving force of the four wheels. For example, a yaw moment can be generated by giving a driving force difference to the left and right wheels to assist steering of the vehicle.
- the electric power steering apparatus configured as described above can maintain its function even at the time of failure of the steering motor, so that the vehicle is stopped with the wheels steered at the time of failure as in the conventional apparatus. It is possible to avoid the situation in which the maneuverability and the behavior stability of the vehicle are reduced, and to improve the safety of the vehicle.
- the CPU may be configured as one, and furthermore, the motor is not limited to the three-phase type.
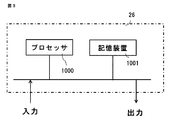
- the control device 26 includes a processor 1000 and a storage device 1001 as an example of hardware is shown in FIG.
- the storage device is not shown, it comprises volatile storage devices such as random access memory and non-volatile auxiliary storage devices such as flash memory.
- an auxiliary storage device of a hard disk may be provided.
- the processor 1000 executes a program input from the storage device 1001. In this case, a program is input from the auxiliary storage device to the processor 1000 via the volatile storage device. Also, the processor 1000 may output data such as the operation result to the volatile storage device of the storage device 1001, or may store data in the auxiliary storage device via the volatile storage device.
- Electric power steering device 2 Steering input mechanism 3a: Steering mechanism for left front wheel 3b: Steering mechanism for right front wheel 4a: Steering mechanism for left rear wheel 4b: Steering mechanism for right rear wheel , 5: steering wheel, 6: steering shaft, 7: steering sensor, 8: reaction force motor, 9a: left front wheel, 9b: right front wheel, 10a: knuckle arm for left front wheel, 10b: knuckle arm for right front wheel, 11a: left Tie rod for front wheel, 11b: Tie rod for right front wheel, 12a: Rack shaft for left front wheel, 12b: Rack shaft for right front wheel, 13a: Steering motor for left front wheel, 13b: Steering motor for right front wheel, 14a: Left rear wheel , 14b: right rear wheel, 15a: left rear wheel knuckle arm, 15b: right rear wheel knuckle arm, 16a: left rear wheel tie rod, 16b: right rear wheel tie rod, 17a: left rear wheel rack shaft
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
Abstract
車両の4輪にそれぞれ独立した転舵機構を有する電動パワーステアリング装置においては、転舵モータが故障した際には当該の車輪の転舵機構の機能が停止し、車両の操縦性、安定性が低下するという課題があった。 車両の4輪にそれぞれ独立して設けられた転舵機構3a、3b、4a、4bの転舵モータ13a、13b、18a、18bは、それぞれ2組の3相巻線19a、19bと、3相巻線を個別に駆動する2組のインバータ22a、22bとを有する3相2重化モータの冗長構成とした。
Description
本願は、車両の4輪にそれぞれ独立した転舵機構を有する電動パワーステアリング装置およびそれを搭載した車両に関するものである。
車両の4輪にそれぞれ独立した転舵機構を有する従来の電動パワーステアリング装置においては、転舵機構を構成する転舵モータが故障した際のバックアップ機能は設けられていなかった(例えば、特許文献1参照)。
特許文献1に示した従来の4輪にそれぞれ独立した転舵機構を有する車両の電動パワーステアリング装置においては、転舵モータが故障した際には当該の車輪の転舵機構の機能が停止し、車両の操縦性、安定性が低下すると言う課題点があった。
本願は、上記のような課題を解決するためになされたものであり、転舵モータが故障しても当該の車輪の転舵機構の機能を継続でき、車両の操縦性、安定性を確保することができる電動パワーステアリング装置を得ることを目的とするものである。
本願に開示される電動パワーステアリング装置は、車両の4輪にそれぞれ独立した転舵機構を有する電動パワーステアリング装置において、転舵機構の転舵モータを冗長構成にしたものである。
本願によれば、転舵モータが故障した際にも当該の車輪の転舵機構の機能を継続することができるため、装置の安全性が向上し、車両の操縦性、安定性を確保することができる電動パワーステアリング装置を得ることができる。
実施の形態1.
以下、実施の形態1に係る電動パワーステアリング装置を図1及び図2に基づいて説明する。
図1は実施の形態1による電動パワーステアリング装置を示すシステム構成図、図2は実施の形態1による電動パワーステアリング装置に用いる転舵機構の転舵モータの回路図である。
図1において、運転者が操作するハンドル5にはステアリングシャフト6が連結され、ステアリングシャフト6には運転者の操舵角を検知する操舵センサ7と、運転者の操舵に対し操舵反力を付与する反力モータ8が取り付けられ、これらハンドル5、ステアリングシャフト6、操舵センサ7、反力モータ8により操舵入力機構2をなしている。
以下、実施の形態1に係る電動パワーステアリング装置を図1及び図2に基づいて説明する。
図1は実施の形態1による電動パワーステアリング装置を示すシステム構成図、図2は実施の形態1による電動パワーステアリング装置に用いる転舵機構の転舵モータの回路図である。
図1において、運転者が操作するハンドル5にはステアリングシャフト6が連結され、ステアリングシャフト6には運転者の操舵角を検知する操舵センサ7と、運転者の操舵に対し操舵反力を付与する反力モータ8が取り付けられ、これらハンドル5、ステアリングシャフト6、操舵センサ7、反力モータ8により操舵入力機構2をなしている。
左前輪9aの左前輪用ナックルアーム10aには左前輪用ラック軸12aに連結された左前輪用タイロッド11aが接続されており、左前輪用ラック軸12aの動きが左前輪用タイロッド11aと、左前輪用ナックルアーム10aを経て左前輪9aに伝わることにより、左前輪9aが操向される。左前輪用ラック軸12aには左前輪用転舵モータ13aが取り付けられており、左前輪用転舵モータ13aの出力が左前輪用ラック軸12aを動かす動力となっており、これら左前輪用ラック軸周辺の機構により、左前輪用転舵機構3aをなしている。
同様に、右前輪9bの右前輪用ナックルアーム10bには右前輪用ラック軸12bに連結された右前輪用タイロッド11bが接続されており、右前輪用ラック軸12bの動きが右前輪用タイロッド11bと、右前輪用ナックルアーム10bを経て右前輪9bに伝わることにより、右前輪9bが操向される。右前輪用ラック軸12bには右前輪用転舵モータ13bが取り付けられており、右前輪用転舵モータ13bの出力が右前輪用ラック軸12bを動かす動力となっており、これら右前輪用ラック軸周辺の機構により、右前輪用転舵機構3bをなしている。
左後輪14aの左後輪用ナックルアーム15aには左後輪用ラック軸17aに連結された左後輪用タイロッド16aが接続されており、左後輪用ラック軸17aの動きが左後輪用タイロッド16aと、左後輪用ナックルアーム15aを経て左後輪14aに伝わることにより、左後輪14aが操向される。左後輪用ラック軸17aには左後輪用転舵モータ18aが取り付けられており、左後輪用転舵モータ18aの出力が左後輪用ラック軸17aを動かす動力となっており、これら左後輪用ラック軸周辺の機構により、左後輪用転舵機構4aをなしている。
同様に、右後輪14bの右後輪用ナックルアーム15bには右後輪用ラック軸17bに連結された右後輪用タイロッド16bが接続されており、右後輪用ラック軸17bの動きが右後輪用タイロッド16bと、右後輪用ナックルアーム15bを経て右後輪14bに伝わることにより、右後輪14bが操向される。右後輪用ラック軸17bには右後輪用転舵モータ18bが取り付けられており、右後輪用転舵モータ18bの出力が右後輪用ラック軸17bを動かす動力となっており、これら右後輪用ラック軸周辺の機構により、右後輪用転舵機構4bをなしている。
操舵入力機構2と各転舵機構3a、3b、4a、4bは機械的には連結されておらず、操舵センサ7などからの入力信号に基づき、制御装置26が左前輪用転舵モータ13a、右前輪用転舵モータ13b、反力モータ8、左後輪用転舵モータ18a、右後輪用転舵モータ18bを適切に制御することにより、運転者の操作に応じた転舵がなされる構成、いわゆるステアバイワイヤ方式の電動パワーステアリング装置1を形成している。
さらに、左前輪9aには左前輪用駆動装置27a、右前輪9bには右前輪用駆動装置27b、左後輪14aには左後輪用駆動装置28a、右後輪14bには右後輪用駆動装置28bがそれぞれ独立して設けられており、それぞれの車輪に個別に駆動力を供給する構成となっている。このように本構成では車両29の4輪の操舵機構が独立しており、走行状態に応じて4輪の転舵角度を自在に制御することができると共に、4輪の駆動力も自在に制御することができるため、高い操縦性と挙動安定性を備えた車両を実現することができるものとなっている。
左前輪用転舵モータ13a、右前輪用転舵モータ13b、左後輪用転舵モータ18a、右後輪用転舵モータ18bはそれぞれ冗長構成となっている。即ち、各転舵モータ13a、13b、18a、18bは、2組の3相巻線と、それぞれの3相巻線を個別に駆動する2組のインバータとを有するダブルインバータ方式3相2重化モータとなっており、故障発生時にもモータとしての機能を完全には失わないように構成されている。
次に、ダブルインバータ方式3相2重化モータの構成について1つの転舵モータを例に図2に基づいて説明する。
図2において、転舵モータは2つの3相巻線19a、19bを備えている。第1系統の3相巻線19aの接続端子U1、V1、W1は、CPU20aおよびFET駆動回路21aにより制御される第1のインバータ22aに接続されている。同様に、第2系統の3相巻線19bの接続端子U2、V2、W2は、CPU20bおよびFET駆動回路21bにより制御される第2のインバータ22bに接続されている。
図2において、転舵モータは2つの3相巻線19a、19bを備えている。第1系統の3相巻線19aの接続端子U1、V1、W1は、CPU20aおよびFET駆動回路21aにより制御される第1のインバータ22aに接続されている。同様に、第2系統の3相巻線19bの接続端子U2、V2、W2は、CPU20bおよびFET駆動回路21bにより制御される第2のインバータ22bに接続されている。
転舵モータのロータの回転を検知する回転センサ23aの信号は第1系統の入力回路24aに入力されて、モータの制御に供される。CPU20a、FET駆動回路21a、入力回路24aには電源回路25aから電力が供給される。第1のインバータ22aには車両の電源が接続され、モータを駆動する電力が供給されている。
同様に、回転センサ23bの信号は第2系統の入力回路24bに入力されて、モータの制御に供される。CPU20b、FET駆動回路21b、入力回路24bには電源回路25bから電力が供給される。第2のインバータ22bには車両の電源が接続され、モータを駆動する電力が供給されている。入力回路24a、入力回路24bは制御装置26に接続され、他の3つの転舵モータ、反力モータ8、他の車両システムと協調してモータを制御するよう構成されている。
ここで転舵モータの冗長構成とは、転舵モータであるダブルインバータ方式3相2重化モータが正常時においても、第1系統と第2系統の2組の3相巻線19a、19bとインバータ22a、22bが共に駆動されている状態を言う。
次にダブルインバータ方式3相2重化モータの故障時の動作について説明する。左後輪用転舵モータ18aの第2系統に故障が生じた際を例として説明すると、CPU20bが第2系統の故障を検知すると、FET駆動回路21bの駆動を停止させ、第2系統の3相巻線19bの駆動電流を0とする。したがって、第2系統によって発揮されていたトルクは0となり、モータ全体の出力トルクは正常時の2分の1となるが、第1系統のトルクによって完全に機能を失うことはなく、転舵を継続できる。ここで、CPU20bは入力回路24bを介して制御装置26に故障情報を送信し、他の3つの転舵モータ13a、13b、18b、反力モータ8、他の車両システムの制御が適切に行われるようにする。
次にダブルインバータ方式3相2重化モータの故障時の動作について説明する。左後輪用転舵モータ18aの第2系統に故障が生じた際を例として説明すると、CPU20bが第2系統の故障を検知すると、FET駆動回路21bの駆動を停止させ、第2系統の3相巻線19bの駆動電流を0とする。したがって、第2系統によって発揮されていたトルクは0となり、モータ全体の出力トルクは正常時の2分の1となるが、第1系統のトルクによって完全に機能を失うことはなく、転舵を継続できる。ここで、CPU20bは入力回路24bを介して制御装置26に故障情報を送信し、他の3つの転舵モータ13a、13b、18b、反力モータ8、他の車両システムの制御が適切に行われるようにする。
また、第2系統の駆動を停止すると同時に、第1系統の駆動電流を正常時の2倍に増加させる制御を行うことにより、第1系統によって発揮されるトルクも2倍となり、第2系統によって発揮されていた分のトルクを補って、モータ全体の出力トルクは正常時と変わらないものとすることもできる。
また、第2系統の駆動を停止した後、第1系統により左後輪の転舵角度を中立位置に戻して固定し、以降前輪のみで操舵するようにしても良い。なお、この際は正常な右後輪の転舵角度も中立位置に戻して固定する。
さらに、転舵角度を中立位置に固定したことによって低下した操縦性を4輪の駆動力を制御することによって補うようにしても良い。例えば、左右輪に駆動力差を与えることによってヨーモーメントを発生させて、車両の操向を補助することができる。
さらに、転舵角度を中立位置に固定したことによって低下した操縦性を4輪の駆動力を制御することによって補うようにしても良い。例えば、左右輪に駆動力差を与えることによってヨーモーメントを発生させて、車両の操向を補助することができる。
以上のように構成された実施形態における電動パワーステアリング装置は、転舵モータの故障時においてもその機能が維持できるため、従来の装置のように故障時に車輪が転舵した状態で停止して車両の操縦性、挙動安定性が低下する事態を回避することができ、車両の安全性を向上させることができる。
また、本実施形態ではダブルインバータ方式モータの構成としてCPUを2個としているが、CPUを1個とした構成としても良く、さらに、モータは3相方式に限定されるものでもない。
なお、制御装置26は、ハードウエアの一例を図3に示すように、プロセッサ1000と記憶装置1001から構成される。記憶装置は図示していないが、ランダムアクセスメモリ等の揮発性記憶装置と、フラッシュメモリ等の不揮発性の補助記憶装置とを具備する。また、フラッシュメモリの代わりにハードディスクの補助記憶装置を具備してもよい。プロセッサ1000は、記憶装置1001から入力されたプログラムを実行する。この場合、補助記憶装置から揮発性記憶装置を介してプロセッサ1000にプログラムが入力される。また、プロセッサ1000は、演算結果等のデータを記憶装置1001の揮発性記憶装置に出力してもよいし、揮発性記憶装置を介して補助記憶装置にデータを保存してもよい。
本開示は、例示的な実施の形態が記載されているが、実施の形態に記載された様々な特徴、態様、及び機能は特定の実施の形態の適用に限られるのではなく、単独で、または様々な組み合わせで実施の形態に適用可能である。
従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合が含まれるものとする。
従って、例示されていない無数の変形例が、本願明細書に開示される技術の範囲内において想定される。例えば、少なくとも1つの構成要素を変形する場合、追加する場合または省略する場合が含まれるものとする。
1:電動パワーステアリング装置、2:操舵入力機構、3a:左前輪用転舵機構、3b:右前輪用転舵機構、4a:左後輪用転舵機構、4b:右後輪用転舵機構、5:ハンドル、6:ステアリングシャフト、7:操舵センサ、8:反力モータ、9a:左前輪、9b:右前輪、10a:左前輪用ナックルアーム、10b:右前輪用ナックルアーム、11a:左前輪用タイロッド、11b:右前輪用タイロッド、12a:左前輪用ラック軸、12b:右前輪用ラック軸、13a:左前輪用転舵モータ、13b:右前輪用転舵モータ、14a:左後輪、14b:右後輪、15a:左後輪用ナックルアーム、15b:右後輪用ナックルアーム、16a:左後輪用タイロッド、16b:右後輪用タイロッド、17a:左後輪用ラック軸、17b:右後輪用ラック軸、18a:左後輪用転舵モータ、18b:右後輪用転舵モータ、19a:第1系統の3相巻線、19b:第2系統の3相巻線、20a:CPU、20b:CPU、21a:FET駆動回路、21b:FET駆動回路、22a:第1のインバータ、22b:第2のインバータ、23a:回転センサ、23b:回転センサ、24a:入力回路、24b:入力回路、25a:電源回路、25b:電源回路、26:制御装置、27a:左前輪用駆動装置、27b:右前輪用駆動装置、28a:左後輪用駆動装置、28b:右後輪用駆動装置、29:車両。
Claims (5)
- 車両の4輪にそれぞれ独立した転舵機構を有する電動パワーステアリング装置において、前記転舵機構のそれぞれの転舵モータを冗長構成にしたことを特徴とする電動パワーステアリング装置。
- 前記転舵モータは、2組の3相巻線と、前記3相巻線を個別に駆動する2組のインバータとを有する3相2重化モータであることを特徴とする請求項1に記載の電動パワーステアリング装置。
- 前記3相2重化モータの一方が故障した際に、故障したモータの駆動を停止し、他方のモータの駆動電流を正常時の2倍に増加させるようにした請求項2に記載の電動パワーステアリング装置。
- 前記3相2重化モータの一方が故障した際に、故障したモータの駆動を停止すると共に前記故障したモータで転舵していた車輪の転舵角度を中立位置に固定するようにした請求項2に記載の電動パワーステアリング装置。
- 請求項1から請求項4のいずれか1項に記載の電動パワーステアリング装置を搭載した車両。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/489,124 US11584433B2 (en) | 2017-06-22 | 2018-02-28 | Electric power steering apparatus and vehicle mounted therewith |
| EP18821273.2A EP3643583A4 (en) | 2017-06-22 | 2018-02-28 | ELECTRIC POWER STEERING DEVICE AND VEHICLE EQUIPPED WITH IT |
| CN201880040086.7A CN110753653A (zh) | 2017-06-22 | 2018-02-28 | 电动助力转向装置及搭载该电动助力转向装置的车辆 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-121905 | 2017-06-22 | ||
| JP2017121905A JP6516792B2 (ja) | 2017-06-22 | 2017-06-22 | 電動パワーステアリング装置を搭載した車両 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018235343A1 true WO2018235343A1 (ja) | 2018-12-27 |
Family
ID=64735543
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/007451 WO2018235343A1 (ja) | 2017-06-22 | 2018-02-28 | 電動パワーステアリング装置およびそれを搭載した車両 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11584433B2 (ja) |
| EP (1) | EP3643583A4 (ja) |
| JP (1) | JP6516792B2 (ja) |
| CN (1) | CN110753653A (ja) |
| WO (1) | WO2018235343A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220041206A1 (en) * | 2020-08-06 | 2022-02-10 | Toyota Jidosha Kabushiki Kaisha | Steering system |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110682920B (zh) * | 2019-12-09 | 2020-04-21 | 吉利汽车研究院(宁波)有限公司 | 一种自动驾驶控制系统、控制方法及设备 |
| DE102020110661A1 (de) | 2020-04-20 | 2021-10-21 | Bayerische Motoren Werke Aktiengesellschaft | Verfahren zur Lenkkraftunterstützung eines Lenksystem eines Fahrzeuges |
| US11427086B2 (en) * | 2020-05-19 | 2022-08-30 | Kaney Aerospace, Inc. | System and method for electrical power conversion suited for driving an electric motor |
| EP3974287B1 (en) * | 2020-09-24 | 2024-03-06 | Volvo Truck Corporation | A power assisting steering system and a method of operating a power assisting steering system |
| CN114684254B (zh) * | 2022-04-29 | 2023-07-21 | 中汽创智科技有限公司 | 一种转向助力调节方法、装置、设备及存储介质 |
| CN114954646B (zh) * | 2022-06-16 | 2023-10-03 | 北京理工大学 | 一种车辆转向系统和转向方法 |
| CN116142294A (zh) * | 2023-03-22 | 2023-05-23 | 重庆长安汽车股份有限公司 | 底盘域控制器、底盘系统架构及车辆 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06293276A (ja) * | 1993-04-06 | 1994-10-21 | Nippondenso Co Ltd | 車両の4輪操舵装置 |
| JP2001322557A (ja) * | 2000-05-17 | 2001-11-20 | Toyota Motor Corp | 車両の複数輪独立操舵装置 |
| JP2005112008A (ja) | 2003-10-02 | 2005-04-28 | Toyoda Mach Works Ltd | 車両の統合制御装置 |
| JP2007186100A (ja) * | 2006-01-13 | 2007-07-26 | Toyota Motor Corp | 転舵装置 |
| JP2008544917A (ja) * | 2005-07-04 | 2008-12-11 | ミシュラン ルシェルシェ エ テクニク ソシエテ アノニム | 車輪操舵用アクチュエータ故障時の劣化運転モードを有する車両操縦システム |
| JP2013059208A (ja) * | 2011-09-08 | 2013-03-28 | Denso Corp | 回転電機制御装置、および、これを用いた操舵制御システム |
| JP2013159165A (ja) * | 2012-02-02 | 2013-08-19 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2018016234A (ja) * | 2016-07-29 | 2018-02-01 | 三菱電機株式会社 | 電動パワーステアリング装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2824838B2 (ja) * | 1987-12-10 | 1998-11-18 | スズキ株式会社 | 自動車の四輪操舵装置 |
| JP3572992B2 (ja) | 1999-04-21 | 2004-10-06 | 日立プラント建設株式会社 | 膜濾過装置の運転方法 |
| JP2005343256A (ja) * | 2004-06-01 | 2005-12-15 | Toyota Motor Corp | 車両の挙動制御装置 |
| DE102010050799A1 (de) * | 2010-11-09 | 2012-05-10 | Volkswagen Ag | Kraftfahrzeug mit elektrischer Hilfskraftlenkung |
| JP5841474B2 (ja) | 2012-03-28 | 2016-01-13 | 株式会社クボタ | 膜分離装置の運転方法及び膜分離装置 |
| WO2013146976A1 (ja) | 2012-03-28 | 2013-10-03 | 株式会社クボタ | 膜分離装置の運転方法及び膜分離装置 |
| JP5556845B2 (ja) * | 2012-04-26 | 2014-07-23 | 株式会社デンソー | 3相回転機の制御装置 |
| JP5653386B2 (ja) * | 2012-05-09 | 2015-01-14 | 三菱電機株式会社 | モータ制御装置およびそれを用いた電動パワーステアリング装置 |
| JP2014027726A (ja) * | 2012-07-25 | 2014-02-06 | Ntn Corp | 全輪モータ駆動車におけるモータ駆動装置 |
| ES2489341B1 (es) * | 2012-09-07 | 2015-03-17 | Microelectronica Maser, S.L. | Sistema de direccion asistida para vehiculos |
| EP2765060B1 (en) * | 2013-02-06 | 2018-04-11 | Steering Solutions IP Holding Corporation | Vehicle electric power steering contorl system |
| DE102013207142B4 (de) * | 2013-04-19 | 2014-12-11 | Ford Global Technologies, Llc | Schneckengetriebe |
| US9102331B2 (en) * | 2013-09-20 | 2015-08-11 | GM Global Technology Operations LLC | Multi-functional electric module for a vehicle |
| JP6238284B2 (ja) * | 2013-10-22 | 2017-11-29 | 株式会社Ihiエアロスペース | インバータ装置 |
| JP5959591B2 (ja) * | 2014-10-09 | 2016-08-02 | 三菱電機株式会社 | 3相2重化モータ及び3相2重化モータの製造方法 |
| WO2016072432A1 (ja) * | 2014-11-05 | 2016-05-12 | 日本電産エレシス株式会社 | モータ駆動装置および電動パワーステアリング装置 |
| DE102014224970A1 (de) * | 2014-12-05 | 2016-06-09 | Robert Bosch Gmbh | Lenkantrieb und Lenksystem für ein Fahrzeug |
| JP6421619B2 (ja) * | 2015-01-26 | 2018-11-14 | 株式会社デンソー | 回転電機 |
| WO2016132450A1 (ja) * | 2015-02-17 | 2016-08-25 | 三菱電機株式会社 | 永久磁石式三相二重化モータおよび電動パワーステアリング装置 |
-
2017
- 2017-06-22 JP JP2017121905A patent/JP6516792B2/ja active Active
-
2018
- 2018-02-28 CN CN201880040086.7A patent/CN110753653A/zh active Pending
- 2018-02-28 US US16/489,124 patent/US11584433B2/en active Active
- 2018-02-28 WO PCT/JP2018/007451 patent/WO2018235343A1/ja unknown
- 2018-02-28 EP EP18821273.2A patent/EP3643583A4/en active Pending
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06293276A (ja) * | 1993-04-06 | 1994-10-21 | Nippondenso Co Ltd | 車両の4輪操舵装置 |
| JP2001322557A (ja) * | 2000-05-17 | 2001-11-20 | Toyota Motor Corp | 車両の複数輪独立操舵装置 |
| JP2005112008A (ja) | 2003-10-02 | 2005-04-28 | Toyoda Mach Works Ltd | 車両の統合制御装置 |
| JP2008544917A (ja) * | 2005-07-04 | 2008-12-11 | ミシュラン ルシェルシェ エ テクニク ソシエテ アノニム | 車輪操舵用アクチュエータ故障時の劣化運転モードを有する車両操縦システム |
| JP2007186100A (ja) * | 2006-01-13 | 2007-07-26 | Toyota Motor Corp | 転舵装置 |
| JP2013059208A (ja) * | 2011-09-08 | 2013-03-28 | Denso Corp | 回転電機制御装置、および、これを用いた操舵制御システム |
| JP2013159165A (ja) * | 2012-02-02 | 2013-08-19 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2018016234A (ja) * | 2016-07-29 | 2018-02-01 | 三菱電機株式会社 | 電動パワーステアリング装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3643583A4 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20220041206A1 (en) * | 2020-08-06 | 2022-02-10 | Toyota Jidosha Kabushiki Kaisha | Steering system |
| US11697453B2 (en) * | 2020-08-06 | 2023-07-11 | Toyota Jidosha Kabushiki Kaisha | Steering system |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200102007A1 (en) | 2020-04-02 |
| US11584433B2 (en) | 2023-02-21 |
| JP2019006188A (ja) | 2019-01-17 |
| CN110753653A (zh) | 2020-02-04 |
| EP3643583A1 (en) | 2020-04-29 |
| JP6516792B2 (ja) | 2019-05-22 |
| EP3643583A4 (en) | 2020-08-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2018235343A1 (ja) | 電動パワーステアリング装置およびそれを搭載した車両 | |
| EP3398832B1 (en) | Steer-by-wire electrical power steering device, and control method therefor | |
| US7222008B2 (en) | Vehicle steering control apparatus | |
| WO2014203300A1 (ja) | モータ制御装置、これを使用した電動パワーステアリング装置及び車両 | |
| JP6275211B2 (ja) | 電動パワーステアリング装置 | |
| JP7315364B2 (ja) | 操舵制御システム | |
| WO2021085228A1 (ja) | モータ駆動システム | |
| WO2021095644A1 (ja) | モータ駆動システム | |
| US11973453B2 (en) | Motor drive system | |
| JP2020028142A (ja) | 車両制御装置 | |
| EP3806319B1 (en) | Electric power steering device | |
| JP6282452B2 (ja) | 車両操舵用制御装置 | |
| JP2021070440A5 (ja) | ||
| JP2009173180A (ja) | 電動パワーステアリング装置 | |
| JP2010137745A (ja) | 車両用操舵制御装置 | |
| JP6051911B2 (ja) | ステアリング制御装置、ステアリング制御方法 | |
| JP2016068584A (ja) | 電動パワーステアリング装置 | |
| JP5131423B2 (ja) | 電動パワーステアリング装置 | |
| JP2009254210A (ja) | 電動機制御装置および電動機の制御方法 | |
| JP7153827B1 (ja) | 制御ユニット、操舵装置 | |
| JP2008168658A (ja) | 電動パワーステアリング装置 | |
| KR20220102948A (ko) | 조향 시스템 및 그 제어방법 | |
| JP2024058904A (ja) | 操舵制御装置および操舵制御方法 | |
| JP2007252120A (ja) | 2重系モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18821273 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2018821273 Country of ref document: EP Effective date: 20200122 |