WO2017217265A1 - 周辺環境認識装置 - Google Patents
周辺環境認識装置 Download PDFInfo
- Publication number
- WO2017217265A1 WO2017217265A1 PCT/JP2017/020722 JP2017020722W WO2017217265A1 WO 2017217265 A1 WO2017217265 A1 WO 2017217265A1 JP 2017020722 W JP2017020722 W JP 2017020722W WO 2017217265 A1 WO2017217265 A1 WO 2017217265A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- time range
- surrounding environment
- travel
- risk
- Prior art date
Links
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/3453—Special cost functions, i.e. other than distance or default speed limit of road segments
- G01C21/3461—Preferred or disfavoured areas, e.g. dangerous zones, toll or emission zones, intersections, manoeuvre types, segments such as motorways, toll roads, ferries
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4045—Intention, e.g. lane change or imminent movement
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/40—High definition maps
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle for navigation systems
Abstract
車両に搭載され、前記車両の周辺環境を認識する周辺環境認識装置は、前記車両の動きに関する自車情報を取得する自車情報取得部と、前記車両の周辺の環境要素に対する周辺環境要素情報を取得する周辺環境要素取得部と、前記自車情報に基づいて、前記車両の周辺の各位置に対する前記車両の存在時間範囲を表す自車存在時間範囲を決定する存在時間範囲決定部と、前記自車存在時間範囲および前記周辺環境要素情報に基づいて、前記車両の周辺の走行危険度を決定する走行危険度決定部と、を備える。
Description
本発明は、周辺環境認識装置に関する。
従来、自車両周辺に存在する様々な障害物によりもたらされる、自車両の走行に対する危険度を算出し、算出された危険度に応じて運転支援を行う装置が提案されている。このような装置に関して、下記特許文献1では、自車両の走行予測範囲に基づいて算出された自車のリスクポテンシャルと、対象物の移動予測範囲に基づいて算出された対象物のリスクポテンシャルとの重なりに基づいて、両者の衝突危険度を位置ごとに表現したリスクポテンシャルマップを生成する技術が開示されている。
上記特許文献1では、自車両の走行予測範囲や対象物の移動予測範囲に基づくリスクポテンシャル同士の重なり具合に基づき衝突危険度を評価しているため、自車両と対象物とが本当に時間的に交錯するかどうかを評価することができない。そのため、対象物が移動体であり、本来は時間的に自車両と交錯し得ないような場合においても、その移動予測範囲が自車両の走行予測範囲と空間的に重なってしまうと、実際には衝突の危険がないにも関わらず、その重なり部分を衝突危険度が高い位置として設定してしまうことがある。このように従来技術では、車両の周辺環境の時間的な変化を考慮して、車両の走行危険度を高精度に評価することができない。
本発明による周辺環境認識装置は、車両に搭載され、前記車両の周辺環境を認識するものであって、前記車両の動きに関する自車情報を取得する自車情報取得部と、前記車両の周辺の環境要素に対する周辺環境要素情報を取得する周辺環境要素取得部と、前記自車情報に基づいて、前記車両の周辺の各位置に対する前記車両の存在時間範囲を表す自車存在時間範囲を決定する存在時間範囲決定部と、前記自車存在時間範囲および前記周辺環境要素情報に基づいて、前記車両の周辺の走行危険度を決定する走行危険度決定部と、を備える。
本発明によれば、車両の周辺環境の時間的な変化を考慮して、車両の走行危険度を高精度に評価することができる。
以下、図面を参照して、本発明の実施形態について説明する。
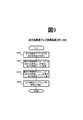
図1は、本発明の一実施形態に係る走行制御システム1の構成の一例を示す機能ブロック図である。本実施形態に係る走行制御システム1は、車両2に搭載され、車両2の周辺における走行道路や周辺車両等の障害物の状況を認識した上で、車両2の走行における現在及び将来のリスクを判断し、適切な運転支援や走行制御を行うためのシステムである。図1に示すように、走行制御システム1は、周辺環境認識装置10、自車位置決定装置30、外界センサ群40、車両センサ群50、地図情報管理装置60、走行制御装置70、車載用HMI装置80、アクチュエータ群90、等を含んで構成される。
周辺環境認識装置10は、例えば、車両2に搭載されたECU(Electronic Control Unit)等であり、処理部100と、記憶部120と、通信部130と、を有する。なお、周辺環境認識装置10の形態に特に制限はなく、ECU以外のものを周辺環境認識装置10として用いてもよい。例えば、周辺環境認識装置10は、走行制御装置70や外界センサ群40等に統合されていてもよい。
処理部100は、例えば、CPU(Central Processing Unit:中央演算処理装置)及びRAM(Random Access Memory)などのメモリを含んで構成される。処理部100は、周辺環境認識装置10の機能を実現するための部分として、自車情報取得部101、周辺環境要素取得部102、環境要素移動予測部103、存在時間範囲決定部104、走行危険度決定部105、走行危険度マップ作成部106、及び走行危険度マップ提供部107を有する。処理部100は、記憶部120に格納されている所定の動作プログラムを実行することで、これらの各部に対応する処理を行う。
自車情報取得部101は、車両2の動きに関連する自車情報として、例えば車両2の位置、走行速度、操舵角、アクセルの操作量、ブレーキの操作量等の情報を、自車位置決定装置30や車両センサ群50から取得する。自車情報取得部101により取得された自車情報は、自車情報データ群121として記憶部120に格納される。
周辺環境要素取得部102は、車両2の周辺における各種環境要素に関する周辺環境要素情報として、例えば車両2の周辺に存在する障害物の情報や、車両2の周辺における道路の特徴を示す特徴物等の情報を、外界センサ群40や地図情報管理装置60から取得する。なお、車両2の周辺に存在する障害物とは、例えば車両2の周囲を移動している他車両、自転車、歩行者等の移動体や、車両2の周囲の道路上で静止している駐車車両、落下物、設置物等である。周辺環境要素取得部102により取得された周辺環境要素情報は、周辺環境要素情報データ群122として記憶部120に格納される。
環境要素移動予測部103は、記憶部120に格納された周辺環境要素情報データ群122に基づいて、外界センサ群40で検出された環境要素に含まれる他車両、自転車、歩行者等の移動体が将来どのように移動するかを予測する。環境要素移動予測部103による移動体の移動予測結果は、当該移動体に対応する周辺環境要素情報に付加され、周辺環境要素情報データ群122として記憶部120に格納される。
存在時間範囲決定部104は、記憶部120に格納された自車情報データ群121や、環境要素移動予測部103による移動体の移動予測結果に基づいて、車両2の周辺の所定位置に対して車両2や環境要素がそれぞれ存在し得る時間範囲を決定する。以下の説明では、存在時間範囲決定部104により決定された車両2と環境要素の存在時間範囲を、自車存在時間範囲、環境要素存在時間範囲とそれぞれ称する。存在時間範囲決定部104により決定された自車存在時間範囲および環境要素存在時間範囲の情報は、存在時間範囲データ群123として記憶部120に格納される。
走行危険度決定部105は、記憶部120に格納された存在時間範囲データ群123が表す自車存在時間範囲および環境要素存在時間範囲や、周辺環境要素情報データ群122が表す周辺環境要素情報に基づいて、車両2の周辺の走行危険度を決定する。
走行危険度マップ作成部106は、走行危険度決定部105による走行危険度の決定結果に基づき、車両2の周辺の各位置と走行危険度との関係を表す走行危険度マップを作成する。走行危険度マップ作成部106により作成された走行危険度マップに関する情報は、走行危険度マップデータ群124として記憶部120に格納される。
走行危険度マップ提供部107は、記憶部120に格納された走行危険度マップデータ群124に基づいて、車両2の走行危険度マップに関する情報を、周辺環境認識装置10内の他の機能や、車両2に搭載された周辺環境認識装置10以外の装置に提供する。
記憶部120は、例えば、HDD(Hard Disk Drive)、フラッシュメモリ、ROM(Read Only Memory)などの記憶装置を含んで構成される。記憶部120は、処理部100が実行するプログラムや、本システムの実現に必要なデータ群などを格納している。本実施形態では、特に、周辺環境認識装置10の機能を実現するための情報として、自車情報データ群121、周辺環境要素情報データ群122、存在時間範囲データ群123、及び走行危険度マップデータ群124が記憶部120に格納される。
自車情報データ群121は、車両2に関するデータの集合体である。例えば、自車位置決定装置30から取得された車両2の位置や、車両センサ群50から取得された車両2の状態に関する情報が、自車情報データ群121に含まれる。
周辺環境要素情報データ群122は、車両2の周辺環境に関するデータの集合体である。例えば、地図情報管理装置60から取得された車両2周辺の道路に関するデジタル道路地図データや、外界センサ群40から取得された車両2周辺の各種環境要素の認識データや、それらを統合して生成されたデータ等が、周辺環境要素情報データ群122に含まれる。また、環境要素移動予測部103による移動体の移動予測結果を示すデータも、周辺環境要素情報データ群122に含まれる。なお、周辺環境要素情報データ群122では、複数の環境要素のそれぞれに対して上記のようなデータが設定される。ここでいう「環境要素」とは、車両2の走行に対して影響を与える情報要素を意味する。例えば、車両2の周辺にある他車両、歩行者等の移動体や落下物等の障害物、車線や道路の境界情報等の道路形状、速度規制や一方通行や信号等の交通ルール等の情報要素が、上記の「環境要素」に含まれる。これらの情報要素は、性質としては様々であるが、いずれも車両2周辺の空間上の位置あるいは領域に意味を与えるものであるという共通点を持つ。そのため、本実施形態では、これらの情報要素を「環境要素」として共通の枠組みで扱い、周辺環境要素情報データ群122におけるデータの蓄積対象とする。
存在時間範囲データ群123は、車両2周辺の各位置について車両2または環境要素が当該位置に存在し得る時間範囲、すなわち前述の自車存在時間範囲や環境要素存在時間範囲を示すデータの集合体である。なお、本実施形態における「時間」とは、ある参照時点を基準とした時間系において示されるものである。好ましくは、現在を参照時点として、車両2の現在位置の周辺の各位置において車両2や環境要素が将来のどの時間帯(例えば、2秒後から3秒後)に存在し得るかを、自車存在時間範囲や環境要素存在時間範囲で示すことができる。ここで、上記の「時間範囲」とは、必ずしも幅を持った時間である必要はなく、ある特定の時点を自車存在時間範囲や環境要素存在時間範囲としてもよい。また、車両2の現在位置の周辺の各位置において車両2や環境要素が存在する時間の確率分布、すなわち各位置における所定の時間間隔ごとの車両2や環境要素の存在確率の分布を、自車存在時間範囲や環境要素存在時間範囲として示してもよい。
走行危険度マップデータ群124は、車両2の周辺の各位置と、車両2の走行危険度、すなわち車両2が当該位置を走行する場合の危険度との関係を示す走行危険度マップに関するデータの集合体である。
通信部130は、各種プロトコルに基づいて、車両2に搭載された他の装置とデータの送受信を行う。通信部130は、例えば、Ethernet(登録商標)又はCAN(Controller Area Network)等の通信規格に準拠したネットワークカード等を含んで構成される。なお、通信部130と車両2に搭載された他の装置との間の接続形態は、Ethernetのような有線接続に限定されることはなく、Bluetooth(登録商標)や無線LAN(Local Area Network)などの近距離無線接続であってもよい。
自車位置決定装置30は、車両2の地理的な位置を測位し、その情報を提供する装置である。自車位置決定装置30は、例えば、全地球航法衛星システム(GNSS)受信装置により構成される。その場合、自車位置決定装置30は、単純にGNSS衛星から受信する電波に基づいた測位結果を提供するように構成されていても良い。あるいは、車両2の移動速度や進行方位角など、外界センサ群40や車両センサ群50から取得可能な情報を活用して、GNSS衛星から受信した電波による測位結果に対して補間や誤差補正を行うように自車位置決定装置30を構成しても良い。
外界センサ群40は、車両2周辺の一定範囲の障害物(他車両、自転車、歩行者、落下物等)や特徴物(道路標識、白線、ランドマーク等)を認識することができるセンサ群である。外界センサ群40は、例えば、カメラ装置、レーダ、レーザーレーダ、ソナー等により構成される。外界センサ群40は、検出した車両2周辺の障害物や特徴物の情報(例えば、車両2からの相対距離と相対角度等)を、外界センサ群40や周辺環境認識装置10が接続されているCAN等の車載ネットワーク上に出力する。周辺環境認識装置10は、この車載ネットワークを通じて、外界センサ群40からの出力結果を取得できるように構成されている。なお、本実施形態では、外界センサ群40で障害物や特徴物を検出する処理を実施する構成になっているが、外界センサ群40から出力される信号やデータを用いて、周辺環境認識装置10や他装置でこれらの検出処理を行っても良い。
車両センサ群50は、車両2の動きに関する各種部品の状態(例えば走行速度、操舵角、アクセルの操作量、ブレーキの操作量等)を検出する装置群である。車両センサ群50は、例えば、CAN等の車載ネットワーク上に、検出したこれらの状態量を定期的に出力する。車載ネットワークに接続された周辺環境認識装置10や他の装置は、この車載ネットワークを通じて、車両センサ群50から出力された各種部品の状態量を取得することができるように構成されている。
地図情報管理装置60は、車両2周辺のデジタル地図情報を管理及び提供する装置である。地図情報管理装置60は、例えば、ナビゲーション装置等により構成される。地図情報管理装置60は、例えば、車両2の周辺を含む所定地域のデジタル道路地図データを備えており、自車位置決定装置30で決定された車両2の位置情報に基づき、地図上での車両2の現在位置、すなわち車両2が走行中の道路や車線を特定するように構成されている。また、特定した車両2の現在位置やその周辺の地図データを、CAN等の車載ネットワークを介して周辺環境認識装置10に提供するように構成されている。
走行制御装置70は、車両2の燃費性能、安全性、利便性等を高めることを目的として、車両2の先進運転支援システム(ADAS:Advanced Driver Assistance Systems)を実現するためのECUである。走行制御装置70は、周辺環境認識装置10から出力される情報に基づいて、例えば、アクチュエータ群90に指示を出して車両2の加減速や操舵を自動で制御したり、車載用HMI装置80を介してドライバに情報提供や警告を出力したりする。
車載用HMI装置80は、車両2に搭載されたスピーカやディスプレイ装置等により構成される。車載用HMI装置80は、周辺環境認識装置10から出力される情報や、走行制御装置70から出力される情報に基づいて、車両2の運転支援に関する運転者への通知を音声や画面を通じて行うように構成されている。
アクチュエータ群90は、車両2の動きを決定する操舵、ブレーキ、アクセル等の制御要素を制御する装置群である。アクチュエータ群90は、運転者によるハンドル、ブレーキペダル、アクセルペダル等の操作情報や、走行制御装置70から出力される目標制御値に基づいて、車両2の動きを制御するように構成されている。
図2は、本実施形態の存在時間範囲データ群123が表す存在時間範囲マップの一例を示す図である。
存在時間範囲データ群123は、車両2の周辺の相対位置と、車両2あるいは環境要素が当該位置に対して存在し得る時間範囲との関係を表すものである。図2では、存在時間範囲データ群123の一例として、車両2の存在時間範囲を示す自車存在時間範囲情報200を示している。図2に示すように、自車存在時間範囲情報200は、所定の参照時点における車両2の位置(例えば現在位置)を中心としたx-y座標系で規定される所定の領域(例えば、x方向で-10m~100m、y方向で-20m~20m等)において、x、yがそれぞれ変数で表される座標値(x、y)の各位置に対する車両2の存在時間範囲T(x、y)を、関数に相当する情報として示したものである。ここで、x軸220の正方向は車両2の前方向に対応し、y軸221の正方向は車両2の左方向に対応する。なお、座標値(x、y)が取り得る値は連続値(例えば、関数表現)でも良いし、離散値(例えば、グリッド表現)でも良い。本明細書では、座標値(x、y)は離散値であり、グリッドマップ上で車両2の存在時間範囲T(x、y)を示す値(あるいは車両2の存在時間範囲T(x、y)に相当する関数パラメータ等)が表現されているものとして説明する。以降、座標値(x、y)と車両2の存在時間範囲T(x、y)の関係を表した存在時間範囲データ群123のデータを、自車存在時間範囲マップと呼ぶ。
図2の自車存在時間範囲マップでは、例として、(x1、y1)と(x2、y2)の2点における車両2の存在時間範囲T(x1、y1)、T(x2、y2)を、それぞれ時間確率分布201、202で示している。なお、それ以外の座標値(x、y)においても同様の情報が含まれる。ここで、車両2の存在時間範囲T(x、y)は、例えば、時間tと当該時間tにおいて車両2が座標値(x、y)の位置に存在する確率pとの関係を示す確率密度関数p(t)により、時間確率分布として表される。例えば、(x1、y1)における車両2の存在時間範囲を表す時間確率分布201は、グラフ211に示す確率密度関数p(t)により表され、(x2、y2)における車両2の存在時間範囲を表す時間確率分布202は、グラフ212に示す確率密度関数p(t)により表される。
あるいは、存在時間範囲T(x、y)は、確率的情報を含まない時間範囲(時間帯)を示す情報でも良い。例えば、(x1、y1)における車両2の存在時間範囲は、グラフ211に示す確率密度関数p(t)においてpの値が存在する時間範囲、すなわちt(1)
min~t(1)
maxに相当する時間範囲として表すことができる。さらに、存在時間範囲T(x、y)は、時間の幅を持たない代表点を示す情報でも良い。例えば、(x1、y1)における車両2の存在時間範囲は、グラフ211に示す確率密度関数p(t)においてpの値が最頻値を示す時間、すなわちt(1)
modeに相当する時間点として表すこともできる。
なお、図2では車両2に関する自車存在時間範囲マップの例を示したが、車両2周辺の各環境要素に関する存在時間範囲マップも同様に、存在時間範囲データ群123に含めることができる。その場合、各環境要素に関する存在時間範囲マップも、図2に示したような車両2を中心としたx-y座標系における時間確率分布や時間範囲で表現される。以降、座標値(x、y)と各環境要素の存在時間範囲E(x、y)の関係を表した存在時間範囲データ群123のデータを、環境要素存在時間範囲マップと呼ぶ。あるいは、静止している環境要素については時間に応じて位置が変化しないため、位置の情報のみを環境要素存在時間範囲マップにおいて示し、時間の情報を含めないようにしても良い。
図3は、本実施形態の走行危険度マップデータ群124が表す走行危険度マップの一例を示す図である。
走行危険度マップデータ群124は、車両2の周辺の各位置における車両2の走行危険度を表すものである。図3に示すように、走行危険度マップデータ群124は、例えば、車両2の現在位置を中心としたx-y座標系で規定される所定の領域(例えば、x方向で-10m~100m、y方向で-20m~20m等)において、x、yがそれぞれ変数で表される座標値(x、y)の各位置に対する車両2の走行危険度R(x、y)を、関数に相当する情報として示したものである。ここで、図2に例示した存在時間範囲マップと同様に、x軸220の正方向は車両2の前方向に対応し、y軸221の正方向は車両2の左方向に対応する。なお、座標値(x、y)の取り得る値についても図2と同様に、連続値(例えば、関数表現)でも良いし、離散値(例えば、グリッド表現)でも良い。図3の例では、座標値(x、y)を離散値として、グリッドマップ上で走行危険度R(x、y)の値を表現している。
図3において、例えば、座標値(17、-4)のセルに格納されている走行危険度R(17、-4)の値は、このセルに対する車両2の走行危険度に相当する。ここで、図3の各セルに格納されている走行危険度R(x、y)の値は、当該セルにおける車両2と車両2周辺の環境要素との相互作用による危険度を積算して正規化したものであり、その値が大きいほど、車両2が走行する際の危険度が高いことを示すものである。図3の例では、各セルでの車両2の走行危険度R(x、y)の値をハッチングで表しており、ハッチングが濃い箇所ほど、走行時の危険度が高いことを示している。
続いて、図4~図12を用いて走行制御システム1の動作について説明する。本実施形態における走行制御システム1の周辺環境認識装置10は、外部装置である自車位置決定装置30、外界センサ群40、車両センサ群50、地図情報管理装置60からそれぞれ取得した車両2や車両2周辺の環境要素に関する情報に基づいて、以下で説明するような周辺環境認識処理を実行し、前述のような車両2周辺の走行危険度マップを作成する。そして、生成した走行危険度マップを走行制御装置70や車載用HMI装置80に出力することで、車両2の運転支援を行う。
図4は、周辺環境認識処理を説明するための説明図として、車両2の走行道路環境の一例を示した図である。図4では、2つの走行道路環境についてのシーン401、402が示されており、いずれも車両2は対向二車線の道路を走行している。シーン401では、車両2近傍の反対車線において他車両412が路上駐車しており、他車両411が当該駐車車両(他車両412)を追い越そうとしている。この道路は車線幅が十分に広くないため、他車両411が駐車車両を追い越す過程で、反対車線(車両2が走行している車線)にはみ出す必要がある。また、車両2の前方において、他車両413が車両2と同等の速度で走行している。
シーン401において、ハッチングで示した領域421、422、423は、他車両411、412、413の予測走行軌道の範囲をそれぞれ示している。一方、太枠で示した領域420は、車両2がこれまでの走行を継続した場合の予測走行軌道の範囲を示している。
シーン402では、シーン401の他車両411、412と比べて、車両2から反対車線を走行している他車両416、417までの距離が車両2に対してそれぞれ長くなっている。すなわち、シーン402の他車両416と他車両417は、シーン401の他車両411と他車両412を、両者の位置関係を保ちながら、その位置を車両2から見て少し前方にそれぞれずらしたものである。したがって、シーン401とシーン402の本質的な差異は、他車両411あるいは他車両416が、車両2の走行車線側にはみ出してくるタイミングである。
図5は、本実施形態の走行制御システム1において実行される周辺環境認識処理フロー500を示す図である。
まず、自車情報取得部101は、ステップS501において所定時間待機する。ここでは、周辺環境認識装置10に対して走行危険度マップ生成のトリガーがかかるまでの時間、処理を進めずに待機する。同トリガーは、走行危険度マップが一定時間毎に生成されるようにタイマーでかけても良いし、走行危険度マップの更新の必要性を検知してオンデマンドにかけても良い。
次に、自車情報取得部101は、ステップS502において、周辺環境認識処理に必要な自車情報として、車両2に関する情報を記憶部120の自車情報データ群121から取得する。ここでは、自車位置決定装置30から取得された車両2の位置情報や、車両センサ群50から取得された車両2の状態に関する情報を、自車情報として取得する。車両2の状態に関する情報には、例えば、車両2の車速、縦加速度、横加速度、ブレーキやアクセルの状態を表す情報等が含まれる。なお、これらの情報は前述のように、自車情報取得部101により、車両ネットワーク等を介して適切なタイミングで自車位置決定装置30や車両センサ群50から取得され、記憶部120に自車情報データ群121として格納されたものである。これには、過去の履歴情報が含まれていても良い。
次に、周辺環境要素取得部102は、ステップS503において、周辺環境認識処理に必要な周辺環境要素情報として、車両2周辺の環境要素に関する情報を記憶部120の周辺環境要素情報データ群122から取得する。ここでは、地図情報管理装置60から取得された車両2周辺の道路に関するデジタル道路地図データや、外界センサ群40から取得された車両2周辺の各種環境要素の認識データを、周辺環境要素情報として取得する。車両2周辺の環境要素の認識データには、障害物(他車両、人、落下物等)、道路形状(路端、白線、停止線、ゼブラゾーン等)、路面状態(凍結、水溜り、ポットホール等)などの認知状況を表す情報が含まれる。なお、これらの情報は前述のように、周辺環境要素取得部102により、車両ネットワーク等を介して適切なタイミングで外界センサ群40や地図情報管理装置60から取得され、記憶部120に周辺環境要素情報データ群122として格納されたものである。これは、いわゆるフュージョン処理により適切に統合されたものでも良い。また、過去の履歴情報が含まれていても良い。
続いて、環境要素移動予測部103は、ステップS504において、ステップS503で取得した周辺環境要素情報に基づいて、車両2の周辺における移動可能な環境要素(車両、人等)が、所定時間の間にどのように移動するかを予測する。ここでは、当該環境要素に関する周辺環境要素情報が表す認識情報(相対位置、移動方向、移動速度等)や、当該環境要素に関する周辺環境要素情報が表す周辺の状況(道路形状、交通ルール、障害物等)を鑑みて、環境要素ごとの動きを予測する。例えば、図4のシーン401において、車両2の反対車線を走行中である他車両411は、その車線前方に他車両411が駐車しているため、それを回避する走行軌道を選択すると予測することができる。したがって、環境要素移動予測部103は、他車両411に対する移動予測結果として、領域421に示すような移動予測情報を構築することができる。なお、図4の領域421では空間上の幾何学的な軌道しか表現されていないが、実際には移動予測情報は時間情報も含むことが好ましい。例えば、所定時間間隔毎の他車両411の位置情報(1秒後の位置、2秒後の位置、・・・)により、他車両411の移動予測情報が表現される。
次に、存在時間範囲決定部104は、ステップS505において、ステップS502で取得した自車情報に基づいて、車両2の存在時間範囲マップを決定する自車存在時間範囲決定処理600を実行する。自車存在時間範囲決定処理600の詳細は図6及び図7を用いて以下で説明する。
次に、存在時間範囲決定部104は、ステップS506において、ステップS504で行った周辺環境要素移動予測の結果に基づいて、各環境要素の存在時間範囲マップを決定する環境要素存在時間範囲決定処理700を実行する。環境要素存在時間範囲決定処理700の詳細は図8を用いて以下で説明する。
ステップS505の自車存在時間範囲決定処理600及びステップS506の環境要素存在時間範囲決定処理700が完了すると、走行危険度マップ作成部106は、ステップS507において、車両2周辺の走行危険度マップを作成する走行危険度マップ作成処理800を実行する。ここでは、ステップS505で決定した車両2の存在時間範囲マップと、ステップS506で決定した環境要素の存在時間範囲マップと、ステップS503で取得した周辺環境要素情報とに基づいて、車両2周辺の走行危険度マップを作成する。走行危険度マップ作成処理800の詳細は図9~図13を用いて以下で説明する。
ステップS507の走行危険度マップ作成処理800が完了すると、走行危険度マップ提供部107は、ステップS508において、作成された走行危険度マップのデータを走行制御装置70や車載用HMI装置80等に出力する。
上述したステップS501~S508の処理を実行した後は、ステップS501に戻り、これらの処理を繰り返し実行する。
<自車存在時間範囲決定処理600(S505)>
次に、図5のステップS505で実行される自車存在時間範囲決定処理600について説明する。図6は、自車存在時間範囲決定処理600のフローチャートの一例を示す図である。
次に、図5のステップS505で実行される自車存在時間範囲決定処理600について説明する。図6は、自車存在時間範囲決定処理600のフローチャートの一例を示す図である。
まず、存在時間範囲決定部104は、ステップS601において、存在時間範囲データ群123を参照し、自車存在時間範囲マップに関する利用可能な算出済データがあるかどうかを確認する。後述するように、自車存在時間範囲マップは、所定の制御モデルに基づいて、車両2の速度及び加速度等に応じて算出される。そのため、前回の処理時から車両2の速度や加速度にあまり変動がない場合は、前回の計算で求められた自車存在時間範囲マップを利用しても良い。また、速度や加速度に応じた自車存在時間範囲マップのパターンをいくつか事前に計算して保持しておき、これを利用することにより、自車存在時間範囲マップを作成する計算量を抑えることも可能である。ステップS601の判定の結果、利用可能な算出済データが存在する場合は、ステップS611において当該データを取得し、その後ステップS605に進む。一方、利用可能な算出済データが存在しない場合は、自車存在時間範囲マップを作成するため、ステップS602以降の処理に移行する。
存在時間範囲決定部104は、ステップS602において、図2に例示したような車両2の周辺の所定領域内で、車両2の存在時間範囲を未計算の位置が存在するか否かを判定する。その結果、未計算の位置が存在する場合は、当該位置における車両2の運転距離L(x、y)を算出し(ステップS603)、その後、算出した運転距離L(x、y)に基づき、車両2の車速、加速度、ジャーク等を考慮して、当該位置における車両2の存在時間範囲T(x、y)を算出する(ステップS604)。ステップS604の処理を実行したらステップS602に戻り、上記の処理を繰り返す。これにより、自車存在時間範囲マップの各セルに対して、車両2の存在時間範囲T(x、y)を算出する。
ステップS602~S604で全てのセルにおける車両2の存在時間範囲の算出が終わると、存在時間範囲決定部104は、ステップS605において、その算出結果に基づき、自車存在時間範囲マップを存在時間範囲データ群123に設定する。一方、ステップS611において自車存在時間範囲マップに関する算出済データを取得した場合に、存在時間範囲決定部104は、ステップS605において、取得した算出済データに基づき、自車存在時間範囲マップを存在時間範囲データ群123に設定する。ステップS605の処理を実行したら、存在時間範囲決定部104は、自車存在時間範囲決定処理600を終了する。
なお、ステップS603において算出される運転距離L(x、y)とは、車両2が自車存在時間範囲マップの原点(現在位置)から座標値(x、y)の位置に到達するまでの道のりに相当する距離である。例えば、図2において、(x1、y1)及び(x2、y2)の2点に到達するまでの軌道の一例は、それぞれ図2の破線231、232のように表される。これは、走行制御装置70の走行軌道計画において用いられる軌道モデルに準じて定められる。破線231、232に示す軌道は、例えば、y軸221上に中心点を持ち原点と点(x1、y1)、点(x2、y2)をそれぞれ通る扇形の弧や、原点と点(x1、y1)、点(x2、y2)をそれぞれ通って原点との接線がx軸220であるスプライン曲線等が考えられる。例えば、扇形の弧のモデルを用いた場合の運転距離L(x、y)は、扇形の半径r(x、y)と扇形の中心角θ(x、y)との積で表される。なお、座標値(x、y)に対する半径r(x、y)と中心角θ(x、y)の値は、以下の式(1)、(2)を用いてそれぞれ算出することが可能である。
r(x、y)=(x2+y2)/2y ・・・(1)
θ(x、y)=arctan(x/(r-y)) ・・・(2)
r(x、y)=(x2+y2)/2y ・・・(1)
θ(x、y)=arctan(x/(r-y)) ・・・(2)
図6のステップS604において、存在時間範囲決定部104は、例えば、上記の運転距離L(x、y)に対する車両2の到達時間の分布を計算することにより、車両2の存在時間範囲T(x、y)を算出する。図7は、運転距離L(x、y)に対する車両2の到達時間の分布の算出例の一例を示したものである。図7では、車両2が座標値(x、y)の位置に最短で到達する時間tmin(x、y)と、最長で到達する時間tmax(x、y)との間の時間範囲710を、車両2の存在時間範囲T(x、y)としている。この時間範囲710は、車両2の最大縦加速度をαx+(加速時)、αx-(減速時)とすると、図7のグラフ上で、最大加速時の曲線701と最大減速時の曲線702で囲まれる運転距離L(x、y)の範囲に相当する。この方式に拠れば、車両2の加減速を考慮して、車両2の存在時間範囲T(x、y)を求めることができる。
なお、上記の方法で算出される車両2の存在時間範囲T(x、y)は、一様分布の確率分布に相当し、時間tにおいてどれぐらいの確率で座標値(x、y)の位置に車両2が存在し得るかは考慮されていない。そこで、図2に示した時間確率分布201、202のように、座標値(x、y)の各位置における車両2の確率密度関数p(t)を求めて、これを車両2の存在時間範囲T(x、y)としても良い。例えば、走行制御装置70の走行軌道計画に用いられるモデルや、現在の車両2の状態(車速、加速度等)に基づいて、複数の軌道パターンを構築し、各軌道パターンの到達時間の分布を統計的に算出することにより、座標値(x、y)ごとに確率密度関数p(t)の近似解を求める。このようにしても、車両2の存在時間範囲T(x、y)を算出することが可能である。
あるいは、幅を持った時間ではなく、代表点で存在時間範囲T(x、y)を表現しても良い。代表点としては、例えば、図2で説明したように座標値(x、y)ごとに定められた確率密度関数p(t)の最頻値tmode、最小値tmin、最大値tmaxや、中央値等を用いることができる。また、確率密度関数p(t)から車両2の存在時間範囲T(x、y)の代表点を求めるのではなく、現在の車両2の走行状態や、車両2の走行道路の交通ルール等から求めても良い。例えば、道路法規上の最低速度や最高速度を考慮して、車両2が等速走行または等加速度走行を行ったときの各位置までの到達時間を求め、これを車両2の存在時間範囲T(x、y)の代表点とすることができる。さらに、一つ前の処理サイクルで決定した軌道計画情報を走行制御装置70から取得し、これと現在実行中の速度制御の内容に基づいて車両2の各位置までの到達時間を推定することで、車両2の存在時間範囲T(x、y)を決定しても良い。
なお、車両2の存在時間範囲T(x、y)を求める際に、周辺環境要素情報を用いても良い。例えば、周辺環境要素情報に基づいて、車両2が走行することが可能な領域(以降、走行可能領域)を特定し、走行可能領域とその境界付近に該当するセルのみに対して車両2の存在時間範囲T(x、y)を計算することにより、計算量を削減することが可能である。また、走行可能領域や道路形状等の情報を用いて、運転距離L(x、y)をより実態に合わせた値に補正することも可能である。
図6の処理フローでは、ステップS603で車両2の運転距離L(x、y)を算出してからステップS604で存在時間範囲T(x、y)を求める流れになっている。しかし、車両2が座標値(x、y)の各位置に到達するまでの軌道は、実際には複数考えられ、運転距離L(x、y)の値には軌道毎にバラつきがある。そこで、走行軌道計画で求められる軌道モデルから考え得る軌道毎に、車両2の運転距離L(x、y)と存在時間範囲T(x、y)を同時に計算し、存在時間範囲の分布を算出することも可能である。
<環境要素存在時間範囲決定処理700(S506)>
次に、図5のステップS506で実行される環境要素存在時間範囲決定処理700について説明する。図8は、環境要素存在時間範囲決定処理700のフローチャートの一例を示す図である。
次に、図5のステップS506で実行される環境要素存在時間範囲決定処理700について説明する。図8は、環境要素存在時間範囲決定処理700のフローチャートの一例を示す図である。
まず、存在時間範囲決定部104は、ステップS701において、周辺環境要素情報データ群122を参照し、車両2の周辺に存在する環境要素のうち一つを選択する。
続いて、存在時間範囲決定部104は、ステップS702において、ステップS701で選択した環境要素が他車両、自転車、歩行者等の移動体であるか否かを判定する。その結果、環境要素が移動体である場合はステップS703に進み、移動体でない場合はステップS707に進む。
ステップS702で環境要素が移動体であると判定した場合、存在時間範囲決定部104は、ステップS703において、存在時間範囲データ群123を参照し、当該環境要素の環境要素存在時間範囲マップに関する利用可能な算出済データがあるかどうかを確認する。例えば、前回の処理時から当該環境要素の動きにあまり変動がない場合は、前回の計算で求められた環境要素存在時間範囲マップを利用しても良い。また、環境要素の動きや種類毎に存在時間範囲マップのパターンをいくつか事前に計算して保持しておき、これを利用することにより、環境要素存在時間範囲マップを作成する計算量を抑えることも可能である。ステップS703の判定の結果、利用可能な算出済データが存在する場合は、ステップS711において当該データを取得し、その後ステップS707に進む。一方、利用可能な算出済データが存在しない場合は、環境要素存在時間範囲マップを作成するため、ステップS704以降の処理に移行する。
存在時間範囲決定部104は、ステップS704において、周辺環境要素情報データ群122を参照し、ステップS701で選択した環境要素に対する移動予測結果を示す情報を取得する。
続いて、存在時間範囲決定部104は、ステップS705において、図2に例示したような車両2の周辺の所定領域内で、ステップS701で選択した環境要素の存在時間範囲を未計算の位置が存在するか否かを判定する。その結果、未計算の位置が存在する場合は、ステップS704で取得した当該環境要素の移動予測結果に基づき、当該位置における環境要素の存在時間範囲E(x、y)を算出する(ステップS706)。ステップS706の処理を実行したらステップS705に戻り、上記の処理を繰り返す。これにより、環境要素存在時間範囲マップの各セルに対して、当該環境要素の存在時間範囲E(x、y)を算出する。
ステップS705~S706で全てのセルにおける環境要素の存在時間範囲の算出が終わると、存在時間範囲決定部104は、ステップS707において、その算出結果に基づき、環境要素存在時間範囲マップを存在時間範囲データ群123に設定する。一方、ステップS711において環境要素存在時間範囲マップに関する算出済データを取得した場合に、存在時間範囲決定部104は、ステップS707において、取得した算出済データに基づき、環境要素存在時間範囲マップを存在時間範囲データ群123に設定する。また、ステップS702において環境要素が移動体でないと判定した場合に、存在時間範囲決定部104は、ステップS707において、当該環境要素の位置を示す環境要素存在時間範囲マップを存在時間範囲データ群123に設定する。
続いて、存在時間範囲決定部104は、ステップS708において、車両2の周辺に存在する全ての環境要素をステップS701で選択済みであるか否かを判定する。未選択の環境要素がある場合はステップS701に戻り、その中でいずれかの環境要素をステップS701で選択した後、当該環境要素に対して上記ステップS702以降の処理を行う。一方、全ての環境要素を選択済みである場合に、存在時間範囲決定部104は、環境要素存在時間範囲決定処理700を終了する。
なお、ここではステップS705、S706において、各環境要素に対してすべての(x、y)における存在時間範囲を算出しているが、各環境要素の移動予測結果に拠れば、存在し得る位置の範囲は限られているため、その範囲に限定して存在時間範囲を算出するようにしてもよい。
なお、ここではステップS705、S706において、各環境要素に対してすべての(x、y)における存在時間範囲を算出しているが、各環境要素の移動予測結果に拠れば、存在し得る位置の範囲は限られているため、その範囲に限定して存在時間範囲を算出するようにしてもよい。
以上説明した自車存在時間範囲決定処理600および環境要素存在時間範囲決定処理700により、車両2の現在位置の周辺の各位置に対する車両2の存在時間範囲を表す自車存在時間範囲マップと、車両2の現在位置の周辺の各位置に対する各環境要素の存在時間範囲を表す環境要素存在時間範囲マップとが、それぞれ決定される。
<走行危険度マップ作成処理800(S507)>
次に、図5のステップS507で実行される走行危険度マップ作成処理800について説明する。図9は、走行危険度マップ作成処理800のフローチャートの一例を示す図である。
次に、図5のステップS507で実行される走行危険度マップ作成処理800について説明する。図9は、走行危険度マップ作成処理800のフローチャートの一例を示す図である。
まず、走行危険度マップ作成部106は、ステップS801において、走行危険度マップデータ群124に格納されている走行危険度マップにおける走行危険度を初期化する。具体的には、以下で説明するステップS802以降の走行危険度の積算に備えて、図3に例示した走行危険度マップの全てのセルに対して所定の初期値、例えば危険度の最小値を設定する。
そして、走行危険度マップ作成部106は、ステップS802、S803において、静的な環境要素(SE)と動的な環境要素(DE)による走行危険度をそれぞれ算出し、走行危険度マップに積算する。ここでは、図5のステップS505で実行された自車存在時間範囲決定処理600によって作成され、存在時間範囲データ群123に記録された車両2の存在時間範囲マップと、図5のステップS506で実行された環境要素存在時間範囲決定処理700によって作成され、存在時間範囲データ群123に記録された各環境要素の存在時間範囲マップとを用いて、走行危険度決定部105により、車両2の走行に対して各環境要素が及ぼす走行危険度を算出する。こうして算出した環境要素毎の走行危険度を、走行危険度マップ作成部106において走行危険度マップ上でセルごとに積算することにより、車両2の周辺の各位置に対する走行危険度を求める。
ステップS802および803において、全ての環境要素に対する走行危険度を走行危険度マップにおいてセルごとに積算したら、走行危険度マップ作成部106は、ステップS804において、積算した各セルの走行危険度の値を正規化する。これにより、走行危険度マップを構築する。ステップS804の処理を実行したら、走行危険度マップ作成部106は、走行危険度マップ作成処理800を終了する。
以上説明した走行危険度マップ作成処理800により作成される走行危険度マップにおいて、座標値(x、y)の各位置における走行危険度R(x、y)は、各環境要素によりもたらされる危険度の重み付け積算値であり、例えば以下の式(3)で表される。ただし式(3)において、ri、wi(iは1からnの整数)は、環境要素iに関する走行危険度と重み付け係数をそれぞれ表す。
R(x、y)=w1*r1(x、y)+・・・+wn*rn(x、y) ・・・(3)
R(x、y)=w1*r1(x、y)+・・・+wn*rn(x、y) ・・・(3)
走行危険度決定部105は、図9に示した走行危険度マップ作成処理800において、ステップS802では、静的な環境要素k個に関する走行危険度の積算処理を行っており、ステップS803では、動的な環境要素m個に関する走行危険度の積算処理を行っている。静的な環境要素とは、走行危険度の評価対象の時間、すなわち走行軌道計画に必要な将来の時間(例えば、10秒後まで)において、その状態が変化しないものを指している。静的な環境要素には、例えば、道路形状や車線属性(順方向の走行車線か、反対方向の走行車線か等)、交通ルール、路面状態等が含まれる。なお、路面状態等のように、長い時間が経過すると変化する可能性があるが、走行危険度の評価対象の時間においては変化しない環境要素は、静的な環境要素として扱うことができる。一方、動的な環境要素とは、走行危険度の評価対象の時間において、その状態が変化し得るものを指している。動的な環境要素には、車両や歩行者等の移動障害物、死角等による潜在リスク等が含まれる。
図10、図11は、走行危険度マップ作成処理800による走行危険度マップの算出結果の例をそれぞれ示す図である。図10の走行危険度マップ901は、図4のシーン401において生成された走行危険度マップの一例を示したものである。図11の走行危険度マップ902は、図4のシーン402において生成された走行危険度マップの一例を示したものである。
まず、ステップS802における静的な環境要素の走行危険度の算出は、予め定められたモデル(上述した走行危険度の計算式(3)のwiとriに相当)に従い、該当する走行危険度マップのセルに各環境要素による走行危険度の値を積算していくことで行われる。例えば、図10に示される走行危険度マップ901における静的な環境要素の走行危険度は、非車道領域910、路側帯領域911、走行車線領域912、及び路側帯を含む対向車線領域913を、静的な環境要素が示す道路属性としてそれぞれ認識し、それぞれの走行危険度モデルに従って該当セルに走行危険度を積算することで求められる。図10の走行危険度マップ901において、非車道領域910は、車両2が走行不可のため高い走行危険度が設定されている。また、路側帯領域911や対向車線領域913は、基本的に車両2が走行することはないが、追越し等の目的で一時的に走行する可能性があるため、中位の走行危険度が設定されている。一方、走行車線領域912は、車両2の走行に対する危険性がないため低い走行危険度が設定されている。なお、この時点では、移動体等の動的な環境要素の走行危険度はまだ考慮されていないので、領域910~913内の各位置には、それぞれ同等の走行危険度が設定されているものとする。
こうして静的な環境要素の走行危険度の積算を終えたら、次にステップS803において、動的な環境要素の走行危険度の積算が行われる。動的な環境要素の走行危険度は、当該環境要素の存在時間範囲と車両2の存在時間範囲との関係性に基づいて算出される。これは、走行危険度マップの各位置において、当該環境要素と車両2との時間的な交錯関係を評価して、走行危険度を算出することを意味する。なお、車両2の存在時間範囲は、図5のステップS505で実行された自車存在時間範囲決定処理600によって作成され、存在時間範囲データ群123に記録された自車存在時間範囲マップにより表される。また、動的な環境要素の存在時間範囲は、動的な各環境要素について図5のステップS506で実行された環境要素存在時間範囲決定処理700によって作成され、存在時間範囲データ群123に記録された環境要素存在時間範囲マップにより表される。
図10及び図11では、一例として、自車存在時間範囲マップにおける車両2の存在時間範囲の確率分布と、環境要素存在時間範囲マップにおける動的な各環境要素の存在時間範囲の確率分布との重なり具合に基づいて、走行危険度マップの各位置における走行危険度を算出する例を示している。存在時間範囲の確率分布に基づいた環境要素iに対する車両2の走行危険度R(x、y)の算出式は、例えば、以下の式(4)で表される。ただし式(4)において、p(x、y)(t)は車両2の存在時間範囲の確率分布を表しており、pi(x、y)(t)は環境要素iの存在時間範囲の確率分布を表している。

なお、上記の式(4)で表される走行危険度R(x、y)は、前述の式(3)と同様のものであり、環境要素iに関する車両2の走行危険度(衝突確率)ri(x、y)に重み付け係数wiをかけたものに相当する。
図10のグラフ921は、走行危険度マップ901上の座標(21、0)における車両2と動的な環境要素のそれぞれについての存在時間範囲の確率分布を表したものである。この座標位置に関連する動的な環境要素としては、現時点(t=0)で当該位置に存在している他車両413が該当するため、車両2の存在時間範囲の確率分布に加えて、他車両413の存在時間範囲の確率分布がグラフ921に描かれている。他車両413は所定の速度で走行しており、すぐに当該位置から離れるため、グラフ921において他車両413の存在時間範囲の確率分布は、確率1から急速に0に減少する曲線を描く。それに対して、車両2は当該位置に到達するまでに時間を要するため、他車両413とは異なる時間帯に存在時間範囲の確率分布が現れている。したがって、両者の存在時間範囲の確率分布は、グラフ921のように互いに重なっていない。これにより、両者が衝突するリスクはないと判断することができ、動的な環境要素に拠る走行危険度は0として積算される。そのため、走行危険度マップ901では、座標(21、0)における動的な環境要素による走行危険度の値は、静的な環境要素に対して走行車線領域912に設定された低い値のままとなっている。
一方、図10のグラフ922に示されるように、座標(11、-5)では、他車両411と車両2の存在時間範囲の確率分布が重なっていることがわかる。これは、車両2が当該位置まで走行する場合の到達時間の分布と、他車両411が当該位置まで移動する場合の到達時間の分布とが互いに重複しており(グラフ922の斜線部分に相当)、両者の衝突確率が非常に高いことを意味している。そのため、走行危険度マップ901では、座標(11、-5)を含む領域915に対して他車両411に拠る走行危険度が積算され、その周辺よりも走行危険度が高くなっている。
なお、式(4)で示した走行危険度の算出式は、静止物等の静的な環境要素に対しても同様に適用することが可能である。静止物はその場所に存在し続けるので、その存在時間範囲の確率分布は、確率1の一様分布で表される。図10のグラフ923は、路上に駐車している他車両412の近傍の座標(6、-6)における車両2と静的な環境要素のそれぞれについての存在時間範囲の確率分布を表したものである。グラフ923では、車両2の存在時間範囲の確率分布の全てにおいて、他車両412の存在時間範囲の確率が1であり、両者の衝突危険性があることを示している。そのため、走行危険度マップ901では、座標(6、-6)を含む領域916に対して他車両412に拠る走行危険度が積算され、その周辺よりも走行危険度が高くなっている。このように、静止物に対しては、常時確率1の走行危険度となるため、確率的な性質がなくなり、予め定められたモデルに従い所定の値を積算していくことになる。これは、上述した静的な環境要素の走行危険度の算出の仕組みと同様である。すなわち、式(4)で示した走行危険度の算出式は、静的か動的かを問わず全ての環境要素に対して包括的に適用可能である。
図10の走行危険度マップ901と図11の走行危険度マップ902は、上記の方式に従って図4のシーン401、402についてそれぞれ生成した走行危険度マップである。以下では、図10の走行危険度マップ901と図11の走行危険度マップ902との比較説明を行う。
まず、車両2の対向車線を走行しており、路上駐車の他車両412、417をそれぞれ追い越す他車両411、416に拠る走行危険度に着目する。走行危険度マップ901では、他車両411に対応して走行危険度が高い領域915が対向車線領域913内に表れている。なお、駐車中の他車両412に対応する領域916にも高い走行危険度が設定されている。一方、走行危険度マップ902では、他車両416に対応して走行危険度が高い領域931の一部が走行車線領域912内に表れている。なお、駐車中の他車両417に対応する領域932にも高い走行危険度が設定されている。こうした違いは、他車両411、416が他車両412、417をそれぞれ回避して車両2の走行車線側にはみ出すタイミングと、車両2が他車両411、416とそれぞれすれ違うタイミングとの関係による。すなわち、シーン401においては、他車両411が駐車中の他車両412を回避しようとする前に、車両2が他車両411とすれ違うため、走行車線上において車両2と他車両411が衝突する危険度は低い。そのため、走行危険度マップ901では、走行車線領域912内には走行危険度が高い領域915が存在しない。一方、シーン402においては、他車両416が駐車中の他車両417を回避するタイミングと、車両2が他車両416とすれ違うタイミングとが一致しており、走行車線上において車両2と他車両411が衝突する危険度が高くなっている。そのため、走行危険度マップ902では、走行危険度が高い領域931が走行車線領域912内にはみ出している。
次に、車両2に先行している他車両413、418に拠る走行危険度に着目する。走行危険度マップ901、902のいずれにおいても、他車両413、418に対応する走行危険度が現れていない。これは、他車両413、418と車両2とがそれぞれ同等の速度で走行しているため、直近においてこれらが時間的に同一の場所で交錯することがないためである。なお、ここでは例示していないが、車両2と他車両413、418との車間距離が十分でなかったり、他車両413、418が車両2よりも速度が遅かったりすると、直近において両者が時間的に交錯する可能性が出てくる。そのため、このような場合には、走行危険度マップ901、902において、その場所に高い走行危険度が現れることになる。これは、人間の感覚にも合致するものである。
上記の走行危険度マップ901、902に基づき走行軌道計画を行うと、シーン401では、走行危険度マップ901において車両2の走行車線上に高い走行危険度が現れていないので、車両2がそのまま車線中心線を追従するような走行軌道になる。一方、シーン402では、走行危険度マップ902において車両2の走行車線上に高い走行危険度が現れているため、車両2がその場所を避けるように、例えば路側帯側に寄った走行軌道になると想定される。したがって、それぞれのシーンで人間が自然に行う行動と合致する走行軌道が得られる。すなわち、対向車線の駐車車両を認識したときには、必要に応じて、前方の対向車線を走行する他車両が駐車車両を回避できるように、他車両のタイミングに合わせて自車両を自動的に路側帯側に避けることができる。
ここで、従来技術による走行危険度マップについて説明する。図12は、従来技術による走行危険度マップとして、空間上での各車両の予測走行軌道の重なり具合に基づき危険度を評価した場合の走行危険度マップの例を示す図である。なお、図12の走行危険度マップ1001は、図10に示した走行危険度マップ901と同様に、図4のシーン401において生成された走行危険度マップの一例を示したものである。
走行危険度マップ1001では、他車両411、413の予測走行軌道と車両2の予測走行軌道とがそれぞれ重なる部分の領域1002、1003において、走行危険度が高くなっている。しかし、車両2と他車両411、413が領域1002、1003をそれぞれ通過すると予測される時間は時間軸上でずれているため、領域1002、1003の場所では、車両2と他車両411、413とは互いに交錯し得ない。すなわち、走行危険度マップ1001では、領域1002、1003において誤って高い走行危険度を設定していることになる。これは、従来技術では時間軸を固定して、車両2と各環境要素がそれぞれ存在する空間範囲の重なりで危険度を評価しているため、時間軸上の交錯関係を正しく評価できない、ということに起因する。したがって、走行危険度マップ1001を用いて車両2の走行軌道計画を行った場合には、領域1002、1003を避けるような走行軌道を描く可能性がある。その場合、不必要に蛇行するような運転になるため、車両2のユーザに対して不安感や違和感を与えてしまうことになる。
一方、本実施形態によれば、前述のように、各位置における車両2及び各環境要素の存在時間範囲の重なりで危険度を評価しているため、時間軸上の交錯関係を正しく評価できる。したがって、図10や図11で説明したように、車両2の走行危険度を実態に合う形で高精度に算出することが可能である。
また、本実施形態におけるもう一つの特徴として、自車両の走行軌道を前提としていない点が挙げられる。すなわち、周辺環境認識処理500では、図5のステップS505、S506において、車両2の走行軌道を前提とせずに、車両2周辺の所定範囲内の任意の位置について、車両2の存在時間範囲を求めている。そのため、走行危険度マップ上の全ての位置における走行危険度を算出することが可能である。実際に、図10の走行危険度マップ901や図11の走行危険度マップ902では、例えば領域915、916や領域932のように、車両2が通常は走行しない対向車線領域913内の領域における走行危険度も表されている。それに対して、空間上での各車両の予測走行軌道の重なり具合に基づき危険度を評価する従来技術では、車両2の予測走行軌道に対して走行危険度が評価される。そのため、予測走行軌道の範囲から外れた領域では、特に動的な環境要素に関して、走行危険度の評価が行われない。例えば、図12に例示した走行危険度マップ1001では、他車両411、412による走行危険度は対向車線領域913内において現れていない。これは、走行危険度マップ1001を用いた走行軌道計画において、車両2が予測走行軌道の範囲を逸脱することの善し悪しを判断できないことを意味している。例えば、車両2が対向車線側に急遽はみ出して前方の他車両を追い越す必要が出てきたときでも、そのような予測走行軌道が予め得られていなければ、車両2は走行危険度を評価できず、こうした動作を行うことができない。一方、本実施形態によれば、走行危険度マップ上の全ての領域において走行危険度が一様に評価されているので、予め走行軌道を予測していなくても、車両2はあらゆる走行軌道に対応することが可能である。
なお、図10と図11では、存在時間範囲として確率分布を用いて走行危険度を算出する例を説明したが、他の算出方式を用いてもよい。以下では、確率分布以外の算出方式を用いた場合の例について説明する。
図13は、車両2及び各環境要素の存在時間範囲を時間帯で表した場合の本発明による走行危険度マップの例を示す図である。なお、図13の走行危険度マップ1201は、図10に示した走行危険度マップ901と同様に、図4のシーン401において生成された走行危険度マップの一例を示したものである。
図13の走行危険度マップ1201では、車両2及び各環境要素の存在時間範囲をそれぞれ表す時間帯の重なりで走行危険度を評価している。このように時間帯の重なりを用いた場合の環境要素iに対する車両2の走行危険度R(x、y)の算出式は、例えば、以下の式(5)で表される。ただし式(5)において、Texistは車両2の存在時間範囲の長さを表しており、これは図2のグラフ211におけるt(1)
maxとt(1)
minの差や、グラフ212におけるt(2)
maxとt(2)
minの差に相当する。また、Toverlapは車両2と各環境要素との間で存在時間範囲が重複している時間の長さを表している。

なお、上記の式(5)で表される走行危険度R(x、y)は、前述の式(3)と同様のものであり、式(4)において車両2の存在時間範囲の確率分布p(x、y)(t)や、環境要素iの存在時間範囲の確率分布pi(x、y)(t)を一様分布としてそれぞれ近似したものに相当する。
図13のグラフ1221は、走行危険度マップ1201上の座標(21、0)における車両2と動的な環境要素のそれぞれについての存在時間範囲の時間帯を表したものである。この座標位置に関連する動的な環境要素としては、現時点(t=0)で当該位置に存在している他車両413が該当する。グラフ1221では、車両2が存在する時間帯と他車両413が存在する時間帯とは重なっていないため、動的な環境要素に拠る走行危険度は0として積算される。したがって、走行危険度マップ1201では、座標(21、0)における動的な環境要素による走行危険度の値は、静的な環境要素に対して走行車線領域912に設定された低い値のままとなっている。
一方、図13のグラフ1222に示されるように、座標(11、-5)では、他車両411が存在する時間帯と車両2が存在する時間帯とが、斜線部分において互いに重なっている。そのため、走行危険度マップ1201では、座標(11、-5)を含む領域1215に対して他車両411に拠る走行危険度が積算され、その周辺よりも走行危険度が高くなっている。また、グラフ1223では、全ての時間帯において他車両412が存在しており、斜線部分に示すように、車両2が存在する時間帯との間で重なりが生じている。そのため、走行危険度マップ1201では、座標(6、-6)を含む領域1216に対して静止物である他車両412に拠る走行危険度が積算され、その周辺よりも走行危険度が高くなっている。
あるいは、さらに別の走行危険度の算出方式として、例えば、車両2及び各環境要素の存在時間範囲を表す確率分布または時間帯の特徴を表す代表点や代表値を用いて、走行危険度を評価してもよい。代表点または代表値としては、例えば、車両2や各環境要素の存在時間範囲を表す確率分布または時間帯の最頻値、中央値、最小値、最大値等を用いることができる。あるいは、車両2や各環境要素の存在時間範囲を表す確率分布や時間帯を特徴付けるパラメータを代表点や代表値として用いても良い。例えば、車両2や各環境要素の等速走行時の到達時間、等加速度走行時の到達時間、一つ前の処理サイクルで決定した軌道計画情報に基づき推定される到達時間等を、代表点または代表値として用いることができる。
代表点や代表値を用いた場合の環境要素iに対する車両2の走行危険度R(x、y)の算出式は、例えば、以下の式(6)で表される。ただし式(6)において、Trepreは車両2の存在時間範囲の代表値を表しており、T(i)
repreは環境要素iの存在時間範囲の代表値を表している。

上記の式(6)は、車両2の存在時間範囲の代表値Trepreと環境要素iの存在時間範囲の代表値T(i)
repreとの差分の絶対値に基づく関数f(x)により、走行危険度を評価するものである。関数f(x)は、xが大きくなるほど値が小さくなる関数であり、例えば補正係数a、bを用いて、f(x)=a・exp(-bx2)等の式で表すことができる。
式(6)において関数f(x)の値の大きさや減衰の程度は、車両2の存在時間範囲の代表値Trepreや、車両2の車速に応じて、例えば上記補正係数a、bを用いて調整してもよい。また、代表値を中心とした所定の分布(ガウス分布等)により、車両2や各環境要素の存在時間範囲の確率分布を近似し、それらの重ね合わせにより走行危険度を算出してもよい。
あるいは、個々の環境要素iの存在時間範囲に対して走行危険度を評価するのではなく、全ての環境要素iの存在時間範囲を足し合わせたものに対して走行危険度を評価してもよい。この場合は、例えば、全ての環境要素iの存在時間範囲を足し合わせたものにおいて、環境要素が存在していない時間範囲をTfreeと置くと、自車がそのTfreeの中で最大どれぐらいのマージンを持たせることができるのか(Tmergin)で評価するようにしてもよい。例えば、ある(x、y)におけるTfreeが[1s~3s]、自車存在時間範囲が[1.5s~1.8s]だった場合、最大のマージンを持たせられるのは1.8sのときで、Tmergin=0.8sとなる。これは、当該位置(x、y)において、時間上でどれぐらいの安全マージンを持たせられる可能性があるか、を示している。走行危険度は、例えば、上述のf(x)にTmerginを代入することにより、計算される。
あるいは、個々の環境要素iの存在時間範囲に対して走行危険度を評価するのではなく、全ての環境要素iの存在時間範囲を足し合わせたものに対して走行危険度を評価してもよい。この場合は、例えば、全ての環境要素iの存在時間範囲を足し合わせたものにおいて、環境要素が存在していない時間範囲をTfreeと置くと、自車がそのTfreeの中で最大どれぐらいのマージンを持たせることができるのか(Tmergin)で評価するようにしてもよい。例えば、ある(x、y)におけるTfreeが[1s~3s]、自車存在時間範囲が[1.5s~1.8s]だった場合、最大のマージンを持たせられるのは1.8sのときで、Tmergin=0.8sとなる。これは、当該位置(x、y)において、時間上でどれぐらいの安全マージンを持たせられる可能性があるか、を示している。走行危険度は、例えば、上述のf(x)にTmerginを代入することにより、計算される。
以上説明したいずれの算出方式においても、所定位置における車両2と各環境要素の時間軸上の交錯度合を評価しているため、上述した時間確率分布を用いた方式と同等の走行危険度マップを構築することができ、同等の効果を得ることが可能である。
なお、代表点や代表値を用いて走行危険度を評価する場合、ステップS504で算出した各環境要素の移動予測結果そのものが代表点や代表値を示している場合が多いため、必ずしもステップS506で環境要素存在時間範囲マップを生成する必要性はない。その場合は、ステップS506をスキップし、ステップS507では、自車存在時間範囲マップと各環境要素の移動予測結果から直接走行危険度を算出するようにしてもよい。
なお、代表点や代表値を用いて走行危険度を評価する場合、ステップS504で算出した各環境要素の移動予測結果そのものが代表点や代表値を示している場合が多いため、必ずしもステップS506で環境要素存在時間範囲マップを生成する必要性はない。その場合は、ステップS506をスキップし、ステップS507では、自車存在時間範囲マップと各環境要素の移動予測結果から直接走行危険度を算出するようにしてもよい。
以上のように、本実施形態によれば、車両2周辺の各位置における車両2及び環境要素の存在時間範囲の重なりで危険度を評価している。これにより、車両2と各環境要素の時間軸上の交錯関係を正しく評価できるため、従来技術と比べて、走行危険度を実態に合う形で高精度に算出することが可能である。
また、本実施形態によれば、車両2や各環境要素の走行軌道を前提とせず、走行危険度マップ上の任意の位置における走行危険度を評価することができる。そのため、走行軌道計画において、あらゆる走行軌道の善し悪しの評価に対応することが可能である。
また、本実施形態によれば、座標(x、y)と時間tで表現すべき状態空間に対して、時間軸上の交錯関係を走行危険度という指標に投影して空間上に表現した走行危険度マップが得られる。すなわち、状態空間の次数を、変数x、y、tを用いて表現される3次元空間から、変数x、yを用いて表現される2次元空間に落とす効果を有している。したがって、望ましい解(例えば、安全で快適な車両2の走行軌道)を算出するための計算量を削減することが可能である。これにより、従来の方法では解の探索が所定時間内に終わらないため近似解を求めていたような場合でも、本実施形態を用いることで、所定時間内に最適解を求める計算が終わるか、あるいはより良い近似解を得られる可能性が出てくる。これは、本実施形態による走行危険度マップでは、車両2と各環境要素との時間軸上の交錯関係を高精度に表現できるために実現できることである。また、そのため本実施形態では、走行危険度マップの情報を提供する際に、環境要素に関する時間軸上の情報(移動予測情報)を付加する必要がない。一方、従来方式では、車両2と各環境要素との時間軸上の交錯関係を高精度に評価しようとすると、時間軸上の評価を別途実施する必要があるため、本実施形態では不要な移動予測情報の付加が必要になる。
以上説明した本発明の一実施形態によれば、以下の作用効果を奏する。
(1)周辺環境認識装置10は、車両2に搭載され、車両2の周辺環境を認識する。周辺環境認識装置10は、車両2の動きに関する自車情報を取得する自車情報取得部101と、車両2の周辺の環境要素に対する周辺環境要素情報を取得する周辺環境要素取得部102と、自車情報に基づいて、車両2の周辺の各位置に対する車両2の存在時間範囲を表す自車存在時間範囲を決定する存在時間範囲決定部104と、自車存在時間範囲および周辺環境要素情報に基づいて、車両2の周辺の走行危険度を決定する走行危険度決定部105と、を備える。このようにしたので、車両2の周辺環境の時間的な変化を考慮して、車両2の走行危険度を高精度に評価することができる。
(2)存在時間範囲決定部104は、周辺環境要素情報に基づいて、車両2の周辺の各位置に対する環境要素の存在時間範囲を表す環境要素存在時間範囲を決定する。走行危険度決定部105は、自車存在時間範囲および環境要素存在時間範囲に基づいて、車両2の周辺の走行危険度を決定する。このようにしたので、車両2の周辺における環境要素の時間的な変化を考慮して、車両2の走行危険度を高精度に評価することができる。
(3)図10のグラフ921~923や図13のグラフ1221~1223に示すように、存在時間範囲決定部104により決定される自車存在時間範囲は、車両2が各位置に存在し得る時間範囲または時間確率分布を表す。同様に、存在時間範囲決定部104により決定される環境要素存在時間範囲は、環境要素が各位置に存在し得る時間範囲または時間確率分布を表す。このようにしたので、自車存在時間範囲や環境要素存在時間範囲として、車両2や環境要素毎の動きに応じた状態空間を適切に表現できる。
(4)走行危険度決定部105は、自車存在時間範囲の代表値と環境要素存在時間範囲の代表値との差に基づいて、走行危険度を決定することができる。この場合、自車存在時間範囲の代表値と環境要素存在時間範囲の代表値との差が大きいほど走行危険度の値が小さくなるように、走行危険度を決定することが好ましい。また、自車存在時間範囲の代表値は、自車存在時間範囲の最頻値、中央値、最小値または最大値のいずれかとすることができ、環境要素存在時間範囲の代表値は、環境要素存在時間範囲の最頻値、中央値、最小値または最大値のいずれかとすることができる。このようにすれば、車両2や環境要素の時間的な位置の変化に応じて車両2の走行危険度を適切に決定することができる。
(5)また、走行危険度決定部105は、各位置における自車存在時間範囲と周辺環境要素情報が表す環境要素の位置との重なり度合いや、各位置における自車存在時間範囲と環境要素存在時間範囲との重なり度合いに基づいて、走行危険度を決定することもできる。このようにしても、車両2や環境要素の時間的な位置の変化に応じて車両2の走行危険度を適切に決定することができる。
(6)周辺環境認識装置10は、周辺環境要素情報に基づいて環境要素の移動を予測する環境要素移動予測部103をさらに備える。存在時間範囲決定部104は、環境要素移動予測部103による環境要素の移動予測結果に基づいて、環境要素存在時間範囲を決定する。このようにしたので、環境要素の動きを考慮して環境要素存在時間範囲を適切に決定することができる。
(7)周辺環境認識装置10は、車両2の周辺の各位置と走行危険度との関係を表す走行危険度マップを作成する走行危険度マップ作成部106と、作成した走行危険度マップを外部に出力する走行危険度マップ提供部107をさらに備える。この走行危険度マップは、車両2周辺の各位置における走行危険度の値を表すものである。このようにしたので、車両2と各環境要素との時間軸上の交錯関係を走行危険度という指標に投影して、車両2の走行危険度に対する評価結果を2次元空間上で分かりやすく示した走行危険度マップを提供することができる。
(8)走行危険度決定部105は、車両2の位置を基準に設定された所定範囲内の各位置について走行危険度を決定する。このようにしたので、車両2の走行軌道に関わらず、車両2周辺の各位置について走行危険度を決定し、車両2の走行軌道計画において想定し得るあらゆる走行軌道を一元的に評価することができる。
なお、以上で説明した実施形態は一例であり、本発明はこれに限られない。すなわち、様々な応用が可能であり、あらゆる実施の形態が本発明の範囲に含まれる。
例えば、上記実施形態では、周辺環境認識装置10の各処理を、プロセッサとRAMを用いて、所定の動作プログラムを実行することで実現しているが、必要に応じて独自のハードウェアで実現することも可能である。また、上記の実施形態では、周辺環境認識装置10、自車位置決定装置30、外界センサ群40、車両センサ群50、地図情報管理装置60、走行制御装置70、車載用HMI装置80、アクチュエータ群90をそれぞれ個別の装置として記載しているが、必要に応じて任意のいずれか2つ以上の装置を組み合せても良い。
上記の各処理が、プロセッサが所定の動作プログラムを実行することで実現される場合、各処理を実現する動作プログラム、テーブル、ファイル等の情報は、不揮発性半導体メモリ、ハードディスクドライブ、SSD(Solid State Drive)等の記憶デバイス、または、ICカード、SDカード、DVD等の計算機で読み取り可能な非一時的データ記憶媒体に格納することができる。
また、各図面には、実施形態を説明するために必要と考えられる制御線及び情報線を示しており、必ずしも、本発明が適用された実際の製品に含まれる全ての制御線及び情報線を示しているとは限らない。実際にはほとんど全ての構成が相互に接続されていると考えてもよい。
以上説明した実施形態や各種の変形例はあくまで一例であり、発明の特徴が損なわれない限り、本発明はこれらの内容に限定されるものではない。また、上記では種々の実施形態を説明したが、本発明はこれらの内容に限定されるものではない。本発明の技術的思想の範囲内で考えられるその他の態様も本発明の範囲内に含まれる。
次の優先権基礎出願の開示内容は引用文としてここに組み込まれる。
日本国特許出願2016年第120935号(2016年6月17日出願)
日本国特許出願2016年第120935号(2016年6月17日出願)
1:走行制御システム、2:車両、10:周辺環境認識装置、30:自車位置決定装置、40:外界センサ群、50:車両センサ群、60:地図情報管理装置、70:走行制御装置、80:車載用HMI装置、90:アクチュエータ群、100:処理部、101:自車情報取得部、102:周辺環境要素取得部、103:環境要素移動予測部、104:存在時間範囲決定部、105:走行危険度決定部、106:走行危険度マップ作成部、107:走行危険度マップ提供部、120:記憶部、121:自車情報データ群、122:周辺環境要素情報データ群、123:存在時間範囲データ群、124:走行危険度マップデータ群、130:通信部
Claims (13)
- 車両に搭載され、前記車両の周辺環境を認識する周辺環境認識装置であって、
前記車両の動きに関する自車情報を取得する自車情報取得部と、
前記車両の周辺の環境要素に対する周辺環境要素情報を取得する周辺環境要素取得部と、
前記自車情報に基づいて、前記車両の周辺の各位置に対する前記車両の存在時間範囲を表す自車存在時間範囲を決定する存在時間範囲決定部と、
前記自車存在時間範囲および前記周辺環境要素情報に基づいて、前記車両の周辺の走行危険度を決定する走行危険度決定部と、を備える周辺環境認識装置。 - 請求項1に記載の周辺環境認識装置において、
前記存在時間範囲決定部は、前記周辺環境要素情報に基づいて、前記車両の周辺の各位置に対する前記環境要素の存在時間範囲を表す環境要素存在時間範囲を決定し、
前記走行危険度決定部は、前記自車存在時間範囲および前記環境要素存在時間範囲に基づいて、前記車両の周辺の走行危険度を決定する周辺環境認識装置。 - 請求項1または2に記載の周辺環境認識装置において、
前記自車存在時間範囲は、前記車両が前記各位置に存在し得る時間範囲または時間確率分布を表す周辺環境認識装置。 - 請求項2に記載の周辺環境認識装置において、
前記環境要素存在時間範囲は、前記環境要素が前記各位置に存在し得る時間範囲または時間確率分布を表す周辺環境認識装置。 - 請求項2に記載の周辺環境認識装置において、
前記走行危険度決定部は、前記自車存在時間範囲の代表値と前記環境要素存在時間範囲の代表値との差に基づいて、前記走行危険度を決定する周辺環境認識装置。 - 請求項5に記載の周辺環境認識装置において、
前記走行危険度決定部は、前記自車存在時間範囲の代表値と前記環境要素存在時間範囲の代表値との差が大きいほど前記走行危険度の値が小さくなるように、前記走行危険度を決定する周辺環境認識装置。 - 請求項5または6に記載の周辺環境認識装置において、
前記自車存在時間範囲の代表値は、前記自車存在時間範囲の最頻値、中央値、最小値または最大値のいずれかであり、
前記環境要素存在時間範囲の代表値は、前記環境要素存在時間範囲の最頻値、中央値、最小値または最大値のいずれかである周辺環境認識装置。 - 請求項3に記載の周辺環境認識装置において、
前記走行危険度決定部は、前記各位置における前記自車存在時間範囲と前記周辺環境要素情報が表す前記環境要素の位置との重なり度合いに基づいて、前記走行危険度を決定する周辺環境認識装置。 - 請求項4に記載の周辺環境認識装置において、
前記走行危険度決定部は、前記各位置における前記自車存在時間範囲と前記環境要素存在時間範囲との重なり度合いに基づいて、前記走行危険度を決定する周辺環境認識装置。 - 請求項2に記載の周辺環境認識装置において、
前記周辺環境要素情報に基づいて前記環境要素の移動を予測する環境要素移動予測部をさらに備え、
前記存在時間範囲決定部は、前記環境要素移動予測部による前記環境要素の移動予測結果に基づいて、前記環境要素存在時間範囲を決定する周辺環境認識装置。 - 請求項1に記載の周辺環境認識装置において、
前記車両の周辺の各位置と前記走行危険度との関係を表す走行危険度マップを作成する走行危険度マップ作成部をさらに備える周辺環境認識装置。 - 請求項11に記載の周辺環境認識装置において、
前記走行危険度マップを出力する走行危険度マップ提供部をさらに備え、
前記走行危険度マップは、前記各位置における前記走行危険度の値を表す周辺環境認識装置。 - 請求項1に記載の周辺環境認識装置において、
前記走行危険度決定部は、前記車両の位置を基準に設定された所定範囲内の各位置について前記走行危険度を決定する周辺環境認識装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US16/306,913 US11049398B2 (en) | 2016-06-17 | 2017-06-02 | Surrounding environment recognizing apparatus |
| EP17813164.5A EP3474254B1 (en) | 2016-06-17 | 2017-06-02 | Surrounding environment recognition device |
| CN201780036184.9A CN109313857B (zh) | 2016-06-17 | 2017-06-02 | 周边环境识别装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016120935A JP6622148B2 (ja) | 2016-06-17 | 2016-06-17 | 周辺環境認識装置 |
| JP2016-120935 | 2016-06-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017217265A1 true WO2017217265A1 (ja) | 2017-12-21 |
Family
ID=60664190
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/020722 WO2017217265A1 (ja) | 2016-06-17 | 2017-06-02 | 周辺環境認識装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11049398B2 (ja) |
| EP (1) | EP3474254B1 (ja) |
| JP (1) | JP6622148B2 (ja) |
| CN (1) | CN109313857B (ja) |
| WO (1) | WO2017217265A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110936953A (zh) * | 2018-09-21 | 2020-03-31 | 大众汽车有限公司 | 提供周围环境图像的方法和设备与具有这种设备的机动车 |
| WO2020112649A1 (en) * | 2018-11-30 | 2020-06-04 | Zoox, Inc. | Probabilistic risk assessment for trajectory evaluation |
| US11498587B1 (en) * | 2019-01-25 | 2022-11-15 | Amazon Technologies, Inc. | Autonomous machine motion planning in a dynamic environment |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6622148B2 (ja) * | 2016-06-17 | 2019-12-18 | 日立オートモティブシステムズ株式会社 | 周辺環境認識装置 |
| US10252717B2 (en) * | 2017-01-10 | 2019-04-09 | Toyota Jidosha Kabushiki Kaisha | Vehicular mitigation system based on wireless vehicle data |
| JP6838769B2 (ja) * | 2017-04-26 | 2021-03-03 | 日立Astemo株式会社 | 周辺環境認識装置、表示制御装置 |
| WO2018220851A1 (ja) | 2017-06-02 | 2018-12-06 | 本田技研工業株式会社 | 自動運転車の制御のための車両制御装置及び方法 |
| CN110692094B (zh) * | 2017-06-02 | 2022-02-01 | 本田技研工业株式会社 | 用于自动驾驶车的控制的车辆控制装置及方法 |
| US11757994B2 (en) * | 2017-09-25 | 2023-09-12 | Intel Corporation | Collective perception messaging for source-sink communication |
| US11048927B2 (en) | 2017-10-24 | 2021-06-29 | Waymo Llc | Pedestrian behavior predictions for autonomous vehicles |
| DE102017223486A1 (de) * | 2017-12-21 | 2019-06-27 | Continental Teves Ag & Co. Ohg | Verfahren und System zum Vermeiden von lateralen Kollisionen |
| WO2019171422A1 (ja) * | 2018-03-05 | 2019-09-12 | パイオニア株式会社 | 車載装置及び情報処理方法 |
| WO2019176603A1 (ja) * | 2018-03-13 | 2019-09-19 | 日立オートモティブシステムズ株式会社 | 異常診断システム及び異常診断方法 |
| JP2019178971A (ja) * | 2018-03-30 | 2019-10-17 | パナソニックIpマネジメント株式会社 | 環境地図生成装置、環境地図生成方法、及び環境地図生成プログラム |
| JP7043376B2 (ja) * | 2018-09-18 | 2022-03-29 | 株式会社東芝 | 情報処理装置、車両制御装置および移動体制御方法 |
| US11001256B2 (en) | 2018-09-19 | 2021-05-11 | Zoox, Inc. | Collision prediction and avoidance for vehicles |
| CN109733391A (zh) * | 2018-12-10 | 2019-05-10 | 北京百度网讯科技有限公司 | 车辆的控制方法、装置、设备、车辆及存储介质 |
| JP7049283B2 (ja) * | 2019-03-07 | 2022-04-06 | 本田技研工業株式会社 | 車両制御装置 |
| DE102019107411A1 (de) * | 2019-03-22 | 2020-09-24 | Zf Active Safety Gmbh | Steuerungssystem und Steuerungsverfahren zur Pfadzuordnung von Verkehrsobjekten |
| JP7289760B2 (ja) * | 2019-09-18 | 2023-06-12 | 日立Astemo株式会社 | 電子制御装置 |
| US11693415B2 (en) * | 2019-11-06 | 2023-07-04 | Waymo Llc | Predicting cut-in probabilities of surrounding agents |
| CN114761301B (zh) | 2019-12-02 | 2023-05-09 | 日产自动车株式会社 | 车辆控制方法及车辆控制装置 |
| US11801867B2 (en) * | 2020-03-30 | 2023-10-31 | Honda Motor Co., Ltd. | Vehicle control device and vehicle control method |
| JP7369077B2 (ja) * | 2020-03-31 | 2023-10-25 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、及びプログラム |
| JP7390977B2 (ja) | 2020-05-26 | 2023-12-04 | 清水建設株式会社 | 安全管理システム、及び、安全管理方法 |
| CN111830967B (zh) * | 2020-06-05 | 2021-09-17 | 广州文远知行科技有限公司 | 确定停车区域的方法、装置、计算机设备和存储介质 |
| CN111427369B (zh) * | 2020-06-08 | 2020-11-03 | 北京三快在线科技有限公司 | 一种无人车控制方法及装置 |
| JP7452650B2 (ja) * | 2020-06-23 | 2024-03-19 | 株式会社デンソー | 駐停車地点管理装置、駐停車地点管理方法、車両用装置 |
| EP3971864A1 (en) * | 2020-09-18 | 2022-03-23 | Zenuity AB | Risk estimation in autonomous driving environments |
| EP3971526B1 (en) * | 2020-09-18 | 2024-05-08 | Zenuity AB | Path planning in autonomous driving environments |
| US11945469B2 (en) | 2020-11-25 | 2024-04-02 | Zoox, Inc. | Object uncertainty models |
| WO2022147382A2 (en) * | 2020-11-25 | 2022-07-07 | Zoox, Inc. | Object uncertainty models |
| US20220315047A1 (en) * | 2021-03-30 | 2022-10-06 | Honda Research Institute Europe Gmbh | Method, system and vehicle with an uncertainty-based lane positioning control |
| US11532221B1 (en) * | 2021-08-05 | 2022-12-20 | Ford Global Technologies, Llc | System and method for vehicle security monitoring |
| CN113822593A (zh) * | 2021-09-30 | 2021-12-21 | 中国第一汽车股份有限公司 | 一种安全态势评估方法、装置、存储介质及电子设备 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002140799A (ja) * | 2000-10-31 | 2002-05-17 | Natl Inst For Land & Infrastructure Management Mlit | 交差点衝突防止支援方法 |
| JP2008117082A (ja) * | 2006-11-01 | 2008-05-22 | Toyota Motor Corp | 走行制御計画評価装置 |
| JP2012234407A (ja) * | 2011-05-02 | 2012-11-29 | Denso Corp | 衝突確率演算装置、および衝突確率演算プログラム |
| JP2013004021A (ja) * | 2011-06-21 | 2013-01-07 | Toyota Motor Corp | 衝突危険度判定装置 |
| JP2013152551A (ja) * | 2012-01-24 | 2013-08-08 | Toyota Central R&D Labs Inc | 運転支援装置、状況学習装置、及びプログラム |
| JP2014098964A (ja) * | 2012-11-13 | 2014-05-29 | Toyota Motor Corp | 運転支援装置及び運転支援方法 |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7418346B2 (en) * | 1997-10-22 | 2008-08-26 | Intelligent Technologies International, Inc. | Collision avoidance methods and systems |
| US6577334B1 (en) * | 1998-02-18 | 2003-06-10 | Kabushikikaisha Equos Research | Vehicle control |
| JP2007091025A (ja) * | 2005-09-28 | 2007-04-12 | Fuji Heavy Ind Ltd | 車両の前方監視装置 |
| JP4450023B2 (ja) * | 2007-07-12 | 2010-04-14 | トヨタ自動車株式会社 | 自車両危険度取得装置 |
| JP5614055B2 (ja) | 2010-02-22 | 2014-10-29 | トヨタ自動車株式会社 | 運転支援装置 |
| JP2011253302A (ja) | 2010-06-01 | 2011-12-15 | Toyota Motor Corp | 車両用危険度算出装置 |
| CN102225692B (zh) * | 2011-04-26 | 2014-04-02 | 惠州Tcl移动通信有限公司 | 机动车防撞方法及其相应的移动终端与防撞系统 |
| DE102011106176A1 (de) * | 2011-07-01 | 2012-02-02 | Daimler Ag | Verfahren zur Ermittlung einer Gefahrenwahrscheinlichkeit einer Situation zwischen zwei Fahrzeugen in einem Kreuzungsbereich |
| JP5783430B2 (ja) * | 2013-04-26 | 2015-09-24 | 株式会社デンソー | 衝突緩和装置 |
| DE102013015028A1 (de) | 2013-09-10 | 2015-03-12 | Daimler Ag | Verfahren zum Betrieb eines Fahrzeuges |
| DE102014204309A1 (de) * | 2014-03-10 | 2015-09-10 | Robert Bosch Gmbh | Vorrichtung und Verfahren zum Betreiben eines Fahrzeugs |
| JP6180968B2 (ja) * | 2014-03-10 | 2017-08-16 | 日立オートモティブシステムズ株式会社 | 車両制御装置 |
| CN104537889B (zh) * | 2014-12-30 | 2017-03-01 | 四川九洲电器集团有限责任公司 | 一种不同车况下的防撞方法和系统 |
| US9852638B2 (en) * | 2015-06-01 | 2017-12-26 | Telefonaktiebolaget Lm Ericsson(Publ) | Moving device detection |
| US9969329B2 (en) * | 2015-09-16 | 2018-05-15 | Sony Corporation | System and method for generation of a preventive alert |
| US9771071B2 (en) * | 2015-11-19 | 2017-09-26 | Ford Global Technologies, Llc | Dynamic lane positioning for improved biker safety |
| JP6622148B2 (ja) * | 2016-06-17 | 2019-12-18 | 日立オートモティブシステムズ株式会社 | 周辺環境認識装置 |
| US10421459B2 (en) * | 2016-12-20 | 2019-09-24 | GM Global Technology Operations LLC | Contextual-assessment vehicle systems |
| WO2019157193A1 (en) * | 2018-02-09 | 2019-08-15 | Nvidia Corporation | Controlling autonomous vehicles using safe arrival times |
| US11237572B2 (en) * | 2018-12-27 | 2022-02-01 | Intel Corporation | Collision avoidance system, depth imaging system, vehicle, map generator and methods thereof |
-
2016
- 2016-06-17 JP JP2016120935A patent/JP6622148B2/ja active Active
-
2017
- 2017-06-02 EP EP17813164.5A patent/EP3474254B1/en active Active
- 2017-06-02 CN CN201780036184.9A patent/CN109313857B/zh active Active
- 2017-06-02 US US16/306,913 patent/US11049398B2/en active Active
- 2017-06-02 WO PCT/JP2017/020722 patent/WO2017217265A1/ja unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002140799A (ja) * | 2000-10-31 | 2002-05-17 | Natl Inst For Land & Infrastructure Management Mlit | 交差点衝突防止支援方法 |
| JP2008117082A (ja) * | 2006-11-01 | 2008-05-22 | Toyota Motor Corp | 走行制御計画評価装置 |
| JP2012234407A (ja) * | 2011-05-02 | 2012-11-29 | Denso Corp | 衝突確率演算装置、および衝突確率演算プログラム |
| JP2013004021A (ja) * | 2011-06-21 | 2013-01-07 | Toyota Motor Corp | 衝突危険度判定装置 |
| JP2013152551A (ja) * | 2012-01-24 | 2013-08-08 | Toyota Central R&D Labs Inc | 運転支援装置、状況学習装置、及びプログラム |
| JP2014098964A (ja) * | 2012-11-13 | 2014-05-29 | Toyota Motor Corp | 運転支援装置及び運転支援方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3474254A4 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110936953A (zh) * | 2018-09-21 | 2020-03-31 | 大众汽车有限公司 | 提供周围环境图像的方法和设备与具有这种设备的机动车 |
| WO2020112649A1 (en) * | 2018-11-30 | 2020-06-04 | Zoox, Inc. | Probabilistic risk assessment for trajectory evaluation |
| US11215997B2 (en) | 2018-11-30 | 2022-01-04 | Zoox, Inc. | Probabilistic risk assessment for trajectory evaluation |
| US11498587B1 (en) * | 2019-01-25 | 2022-11-15 | Amazon Technologies, Inc. | Autonomous machine motion planning in a dynamic environment |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017224237A (ja) | 2017-12-21 |
| JP6622148B2 (ja) | 2019-12-18 |
| EP3474254A4 (en) | 2020-04-08 |
| US20190333386A1 (en) | 2019-10-31 |
| EP3474254B1 (en) | 2021-05-05 |
| US11049398B2 (en) | 2021-06-29 |
| CN109313857B (zh) | 2021-11-30 |
| CN109313857A (zh) | 2019-02-05 |
| EP3474254A1 (en) | 2019-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6622148B2 (ja) | 周辺環境認識装置 | |
| EP3524934B1 (en) | Systems and methods for determining a projection of an obstacle trajectory onto a reference line of an autonomous vehicle | |
| US10816990B2 (en) | Non-blocking boundary for autonomous vehicle planning | |
| EP3626568B1 (en) | Adjusting speeds along a path for autonomous driving vehicles | |
| US11945434B2 (en) | Delay decision making for autonomous driving vehicles in response to obstacles based on confidence level and distance | |
| US10800408B2 (en) | Determining driving paths for autonomous driving that avoid moving obstacles | |
| US10606277B2 (en) | Speed optimization based on constrained smoothing spline for autonomous driving vehicles | |
| EP3861291B1 (en) | Spline curve and spiral curve based reference line smoothing method | |
| CN110597243B (zh) | 自动驾驶车辆的基于v2x通信的车辆车道系统 | |
| CN110621541B (zh) | 用于生成轨迹以操作自动驾驶车辆的方法和系统 | |
| WO2018066133A1 (ja) | 車両判定方法、走行経路補正方法、車両判定装置、及び走行経路補正装置 | |
| JP7193202B2 (ja) | 動作予測方法及び動作予測装置 | |
| CN111857118A (zh) | 对停车轨迹分段以控制自动驾驶车辆停车 | |
| CN111615476A (zh) | 用于自动驾驶车辆的基于螺旋曲线的竖直停车规划系统 | |
| CN111830959A (zh) | 用于操作自动驾驶车辆的方法、系统和机器可读介质 | |
| US11414096B2 (en) | QP spline path and spiral path based reference line smoothing method for autonomous driving | |
| WO2018211645A1 (ja) | 運転支援方法及び運転支援装置 | |
| WO2018198769A1 (ja) | 周辺環境認識装置、表示制御装置 | |
| JP2018181036A (ja) | 車線変更判定方法及び車線変更判定装置 | |
| JP7206048B2 (ja) | 運転特性推定方法及び運転特性推定装置 | |
| JP2020053069A (ja) | 車載用電子制御装置 | |
| CN115447607A (zh) | 用于规划车辆行驶轨迹的方法和装置 | |
| JP7458797B2 (ja) | 走行支援方法及び走行支援装置 | |
| KR20220161905A (ko) | 가상 차선을 이용한 차량의 제어 방법 및 장치 | |
| JP2023093270A (ja) | 車両制御装置、車両制御方法および車両制御プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17813164 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017813164 Country of ref document: EP Effective date: 20190117 |