WO2017130761A1 - 加熱調理器 - Google Patents
加熱調理器 Download PDFInfo
- Publication number
- WO2017130761A1 WO2017130761A1 PCT/JP2017/001161 JP2017001161W WO2017130761A1 WO 2017130761 A1 WO2017130761 A1 WO 2017130761A1 JP 2017001161 W JP2017001161 W JP 2017001161W WO 2017130761 A1 WO2017130761 A1 WO 2017130761A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- weight
- heating
- state
- cooked
- cooking
- Prior art date
Links
Images















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C7/00—Stoves or ranges heated by electric energy
- F24C7/08—Arrangement or mounting of control or safety devices
- F24C7/082—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination
- F24C7/083—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination on tops, hot plates
-
- H—ELECTRICITY
- H05—ELECTRIC TECHNIQUES NOT OTHERWISE PROVIDED FOR
- H05B—ELECTRIC HEATING; ELECTRIC LIGHT SOURCES NOT OTHERWISE PROVIDED FOR; CIRCUIT ARRANGEMENTS FOR ELECTRIC LIGHT SOURCES, IN GENERAL
- H05B6/00—Heating by electric, magnetic or electromagnetic fields
- H05B6/02—Induction heating
- H05B6/06—Control, e.g. of temperature, of power
- H05B6/062—Control, e.g. of temperature, of power for cooking plates or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F24—HEATING; RANGES; VENTILATING
- F24C—DOMESTIC STOVES OR RANGES ; DETAILS OF DOMESTIC STOVES OR RANGES, OF GENERAL APPLICATION
- F24C7/00—Stoves or ranges heated by electric energy
- F24C7/08—Arrangement or mounting of control or safety devices
- F24C7/082—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination
- F24C7/085—Arrangement or mounting of control or safety devices on ranges, e.g. control panels, illumination on baking ovens
Definitions
- the present invention relates to a cooking device used in general homes, restaurants, offices and the like.
- cooking devices that heat cooking ingredients such as an oven that circulates hot air or superheated steam in the cabinet or a system kitchen and heats cooking containers such as pans and pans have become widespread.
- the heating cooker incorporated in the system kitchen include an induction heating cooker that performs induction heating by an induction electromagnetic coil, a gas cooker that uses a direct gas fire, and a heater heating cooker that heats using an electric heater.
- a cooking device generally cooks cooked food by measuring the temperature inside the cooking chamber and the temperature of a cooking container such as a pan or frying pan.
- the cooking device includes a thermometer having a detection needle shaped like a needle. And the said detection needle
- the cooking device which has the function to detect the temperature of a cooking container and the weight change of a to-be-cooked object and to estimate the center state of a to-be-cooked object indirectly is disclosed (for example, patent document 2 or (See Patent Document 3).
- the heating cookers of Patent Literature 2 and Patent Literature 3 include a weight detection unit that measures the weight of the cooking object together with the cooking container in the cooking device body, and a temperature detection unit that measures the temperature of the cooking container, The state of the center of the object to be cooked is estimated by the following method, and cooking is performed.
- the heating cooker of Patent Document 2 first detects the initial weight of the cooking object before heating. After the start of heating, a decrease in the weight of the object to be cooked due to the evaporation of moisture in the object to be cooked is detected by heating. Then, the cooking is ended when the information on the target food stored in advance is reduced to an optimum relative weight with respect to the initial weight. Thereby, the finished state is judged in place of the core temperature of the object to be cooked in a non-contact manner.
- the heat state of the object to be cooked changes depending on the ratio of the heating area in contact with the actual cooking container and the thickness of the object to be cooked with respect to the projected area on the heating side of the object to be cooked. .
- fat and bone ratio in meat whether the fish saute is in a fillet state, or whether it is in a single state from the head to the tail, other than proteins and moisture that form the muscle structure of the cooked food
- the ratio that is, the state of the food
- the way heat is transferred to the inside differs.
- the baking method that is, the amount of moisture evaporated from the food to be cooked changes. Therefore, the relative weight with respect to the initial weight before a heating changes with the state of to-be-cooked material.
- the heating cooker of Patent Document 3 first calculates the chemical potential of the cooking object from the change in the weight of the cooking object per time and the transition of the supplied heating energy over time.
- a heating cooker is the structure which cooks by estimating the state of to-be-cooked material with the value of the calculated chemical potential.
- the chemical potential is a characteristic property of the cooked food.
- the above-mentioned cooking device is based on the idea that the calculated chemical potential matches the chemical potential of the object to be cooked based on the measured weight change per hour and the transition of the supplied heating energy over time. Is based. Therefore, it is explained that it is possible to estimate which food is cooked by comparing the calculated chemical potential value with the chemical potential information stored in the storage device.
- the heating cooker is configured to perform cooking by determining the finished state in a non-contact manner instead of the core temperature of the object to be cooked by calculating the chemical potential.
- the present invention provides a cooking device capable of cooking by accurately determining the finished state of the core temperature from the weight change of the object to be cooked.
- the cooking device of the present invention includes a heating unit that heats the food to be cooked, a weight detection unit that measures the weight of the food to be cooked, a selection unit that selects the type of the food to be cooked, and a selection unit.
- An information storage unit that stores information corresponding to the type of the selected cooking object, a weight detection result measured by the weight detection unit, and a heating unit is controlled based on the type of the cooking object selected by the selection unit.
- a control unit is provided.
- the control unit is configured to measure the first weight value of the object to be cooked measured by the weight detection unit, and the second weight value obtained by measuring the weight of the object to be cooked heated by the heating unit after measuring the first weight value.
- storage part corresponding to the kind of to-be-cooked object selected by the selection part is compared, The structure of the to-be-cooked object under heating is estimated, and the structure which heat-cooks is provided.
- the ratio of the actual heating contact area to the heating-side projected area of the cooking object, the thickness of the cooking object, and the protein forming the muscle part of the cooking object, based on the change in the weight of the cooking object Estimate the state of the item to be cooked, such as the proportion other than moisture.
- a control part controls a heating part on the heating conditions match
- the cooking device which can finish a to-be-cooked object in the optimal state is provided.
- FIG. 1 is a cross-sectional view showing a schematic configuration of a heating cooker according to Embodiment 1 of the present invention.
- FIG. 2 is a schematic configuration diagram showing a main part of the cooking device.
- FIG. 3 is a schematic configuration diagram showing a main part of the cooking device.
- FIG. 4 is a diagram showing a calibration curve for the change in weight and the change in core temperature stored in the information storage unit in the heating cooker.
- FIG. 5: A is a diagram which shows the gradient of the weight change rate by the heating with respect to the 1st memory
- FIG. 5B is a diagram showing a gradient of a rate of change in weight due to heating with respect to a first memorized state weight value of 150 g in the heating cooker.
- FIG. 5B is a diagram showing a gradient of a rate of change in weight due to heating with respect to a first memorized state weight value of 150 g in the heating cooker.
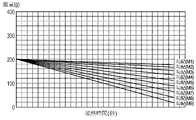
- FIG. 5C is a diagram showing a gradient of a weight change rate due to heating with respect to a first memorized state weight value of 200 g in the heating cooker.
- FIG. 5D is a diagram showing a gradient of a weight change rate due to heating with respect to a first memorized state weight value 250 g in the heating cooker.
- FIG. 6A is a diagram showing a gradient of a rate of change in weight due to heating with respect to a first memorized state weight value of 300 g in the heating cooker.
- FIG. 6B is a diagram showing a gradient of a weight change rate due to heating with respect to a first memorized state weight value of 350 g in the heating cooker.
- FIG. 6C is a diagram showing a gradient of a rate of change in weight due to heating with respect to a first memorized state weight value of 400 g in the heating cooker.
- FIG. 7 is a diagram showing the calculation of the gradient (A) in the cooking device.
- FIG. 8 is a diagram showing a comparison between the gradient (A) in the heating cooker and the first storage state weight value stored in the information storage unit.
- FIG. 9 is a diagram comparing the gradient (MX) information stored in the information storage unit in the heating cooker and the gradient (A) calculated from the weight detection.
- FIG. 10 is a diagram comparing the gradient (MX) information stored in the information storage unit of the heating cooker and the gradient (B) calculated from the weight detection.
- FIG. 11 is a diagram showing the estimation of the core temperature value in the cooking device.
- FIG. 12 is a diagram showing the first memorized state weight value and the gradient (MX) of the weight change rate in the cooking device according to Embodiment 2 of the present invention.
- FIG. 13 is a diagram comparing the gradient (MX) information stored in the information storage unit in the heating cooker and the gradient (A) calculated from the weight detection.
- FIG. 14 is a diagram comparing the gradient (MX) information stored in the information storage unit of the heating cooker and the gradient (B) calculated from the weight detection.
- FIG. 15 is a diagram showing estimation of a core temperature value in the cooking device.
- FIG. 1 is a schematic cross-sectional view showing a schematic configuration of a cooking device according to Embodiment 1 of the present invention.
- the cooking device of the present embodiment includes a cooking vessel 1, a heating unit 3, a control unit 4, a case 5 composed of a top plate 2 and a steel plate 11, and a support unit 6. And a weight detector 7 and a mounting table 12.
- the cooking container 1 accommodates the food to be cooked by transferring heat.
- the heating unit 3 heats the food to be cooked via the cooking container 1.
- the control unit 4 includes an inverter 9, a drive control unit 10, an information storage unit 17, and the like, and controls the heating amount of the heating unit 3 and the like.
- the housing 5 is configured with a top plate 2 at the top, and includes at least the heating unit 3 and the control unit 4. That is, the top plate 2 of the housing 5 constitutes a placement surface on which the cooking container 1 is placed.
- the weight detection unit 7 measures the weight of the object to be cooked.
- the cooking device of the present embodiment has an operation display unit 8 that accepts an operation input by the user and displays information from the cooking device.
- the operation display unit 8 is connected to the control unit 4 and disposed at a position where the user can visually recognize the operation display unit 8.
- the operation display unit 8 includes a selection unit that selects a type of the object to be cooked by the user, a display function that displays a weight value measured by the weight detection unit 7, and the like.
- the heating unit 3 is configured by, for example, an induction heating coil that generates a high-frequency electromagnetic field by supplying a high-frequency current and induction-heats the cooking vessel 1.
- the heating unit 3 is connected to the drive control unit 10 via an inverter 9 constituting the control unit 4.
- the drive control unit 10 controls the high frequency electromagnetic field generated from the induction heating coil that is the heating unit 3 by adjusting the frequency and current amount of the high frequency current through the inverter 9.
- the drive control unit 10 is configured as a part of the control unit 4 mainly with a microcomputer and its peripheral circuits, and controls the drive of the inverter 9. Specifically, the drive control unit 10 controls the drive of the inverter 9 based on the operation input by the user via the operation display unit 8 and information such as current, voltage, and power supplied to the inverter 9. . Thereby, the drive control part 10 adjusts the high frequency current supplied from the inverter 9 to the induction heating coil which is the heating part 3. And the drive control part 10 changes the electric power which heats the cooking container 1, and heats a to-be-cooked item appropriately.
- the lower half of the housing 5 is composed of the steel plate 11 having a thickness t of about 1 mm, for example.
- the steel plate 11 is formed in a box shape having an open upper surface.
- the upper end portion of the box-shaped steel plate 11 is bent outward to form the flange 5a.
- the flange 5 a is brought into contact with the lower surface of the top plate 2 constituting the upper half of the housing 5.
- the steel plate 11 of the housing 5 is fixed to the top plate 2 with, for example, screws.
- the housing 5 forms a substantially sealed space (including a sealed space) with the box-shaped steel plate 11 and the top plate 2.
- the heating unit 3, the control unit 4, and the like are built in the substantially sealed space (including the sealed space) of the housing 5.
- FIG. 2 is a schematic configuration diagram showing an example of a peripheral configuration of the support unit 6 of the heating cooker.
- the support portion 6 is composed of a box-shaped steel plate having a flange 6 a that is substantially the same (including the same) shape as the steel plate 11 that forms the lower half of the housing 5.
- the support portion 6 has a shape that is slightly larger than the steel plate 11 so that the box-shaped steel plate 11 of the housing 5 can be accommodated.
- a large opening 6bb is formed on the bottom surface 6b of the support 6.
- the opening 6bb of the bottom surface 6b is formed in consideration of keeping the weight as low as possible while ensuring the strength of the support 6.
- the flange 6a of the support portion 6 is formed in such a width and length that does not protrude from the outer periphery of the top plate 2 when the housing 5 is housed (see FIG. 1).
- the height of the support portion 6 is set so that, for example, a gap of about 1 mm is formed between the lower surface of the top plate 2 and the upper surface of the flange 6a of the support portion 6 when the housing 5 is stored. Is done.
- the support part 6 is accommodated through the opening part 12a of the mounting table 12 which comprises a kitchen stand where parts other than the flange 6a perform cooking.
- the flange 6a portion is provided in a size and shape that comes into contact with the end 12aa of the opening 12a of the mounting table 12. Thereby, the support part 6 is mounted so that it may suspend from the mounting base 12. FIG. At this time, as described above, it is placed in a positional relationship in which a gap is formed between the upper surface of the flange 6 a of the support portion 6 and the lower surface of the top plate 2.
- the height of the portion protruding upward from the upper surface 12b of the mounting table 12 is about 4 mm in thickness of the top plate 2
- the total thickness of the steel plate of the support portion 6 is about 1 mm
- the gap 1 mm between the top plate 2 and the flange 6a of the support portion 6 is about 6 mm in total.
- FIG. 3 is a schematic configuration diagram showing an example of a peripheral configuration of the weight detection unit 7 of the cooking device.
- the weight detection unit 7 includes, for example, a weight sensor 13 configured by a load cell, a fixed connection unit 14, a load transmission unit 15, and the like.
- the fixed connection portion 14 connects the weight sensor 13 and the steel plate 11 of the housing 5.
- the load transmission unit 15 transmits and supports the load of the housing 5 and the cooking container 1 to the support unit 6 via a load receiving unit 16 described later.
- the weight sensor 13 is specifically composed of a beam type load cell having a through hole 13a.
- the beam type load cell has a component height of about 2 cm, but has a very good detection accuracy.
- the load transmitting portion 15 includes a convex portion 15a having a convex lens shape at the tip.
- the convex portion 15 a of the load transmitting portion 15 is placed in contact with the lens-shaped concave portion 16 a of the load receiving portion 16 provided at a position facing the support portion 6. At this time, the convex portion 15a of the load transmitting portion 15 and the concave portion 16a of the load receiving portion 16 are connected by point contact.
- the support portion 6 has a shape that is slightly larger so that the steel plate 11 portion of the housing 5 can be accommodated.
- the height of the support portion 6 is set so that a gap of about 1 mm is formed between the top plate 2 and the flange 6 a of the support portion 6 when the housing 5 is stored.
- casing 5 and the support part 6 are arrange
- the housing 5 is supported by the support 6 via the weight detection unit 7 at a position lower than the opening surface of the opening 12 a of the mounting table 12.
- the weight detection part 7 will be in the state which can detect the weight of to-be-mounted objects, such as the cooking container 1 mounted on the housing
- the weight detection unit 7 is disposed, for example, in the concave portions 11 b (see FIG. 1) at the four corners of the bottom surface 5 b of the steel plate 11 of the housing 5 and detects the load applied to each.
- the recess 11b is formed to be recessed from the bottom surface 5b of the steel plate 11 to the top plate 2 side.
- the depth of the concave portion 11 b is formed so that at least a part of the load transmitting portion 15 of the weight detecting portion 7 protrudes downward from the lowermost portion of the steel plate 11.
- the weight detection unit 7 is disposed in the recess 11 b of the outer bottom surface 5 b of the steel plate 11 of the housing 5.
- the weight detection part 7 is arrange
- the cooking device can be used continuously with a simple replacement operation.
- the output signal detected by the weight detector 7 is transmitted to the drive controller 10 of the controller 4 via the signal line 7a shown in FIG.
- the control unit 4 converts the input output signal into a weight, and displays the converted weight on the operation display unit 8.
- control unit 4 includes the information storage unit 17 in addition to the drive control unit 10.
- the information storage unit 17 stores information corresponding to the type of cooking object selected by the selection unit of the operation display unit 8.
- the information storage unit 17 corresponds to the type of the cooking object, and the weight of the predetermined cooking object, the first stored weight value, the second stored weight value, and the plurality of second stored weights.
- Information on the value and information on the core temperature value of the center temperature (core temperature) inside the object to be cooked are stored.
- the first stored weight value is the weight at the start of heating when heating at a predetermined temperature.
- the second memorized weight value is a weight after heating after a predetermined time has elapsed from the first memorized weight value at the start of heating.
- the information on the plurality of second stored weight values is a plurality of pieces of information on the weight that change the second stored weight value with the gradual progress of a predetermined time.
- the information on the stored core temperature value is information for storing the center temperature (core temperature) inside the cooking object at each predetermined time of the stored second stored weight value as the stored core temperature value.
- the information storage part 17 is a factor which influences the heat transfer effect
- state factor 1, state factor 2, and state factor 3 described below are set and stored.
- State factor 1 is a factor related to the ratio of the heating contact area where the cooking object actually contacts the cooking container with respect to the projected area on the heating side of the cooking object.
- the state factor 2 is a factor relating to the thickness of the object to be cooked.
- the state factor 3 is a factor relating to a ratio other than protein and moisture that form a muscle structure in the cooking object.
- the information storage unit 17 divides the state factors 1, 2, and 3 into, for example, three levels of high / medium / low, and the first storage state weight value at each level of the state factors 1, 2, and 3,
- the second memory state weight value and the memory state core temperature value are stored as subdivided information.
- state factor 1 will be described by taking as an example the case where the cooked object is sauteed chicken thigh fillet.
- the fillet of chicken thigh is in a state in which the muscle surface is uneven with respect to the smooth skin surface. Therefore, when baking the muscle surface of chicken thigh meat, only the convex portion of the muscle surface is in contact with the heating surface of the cooking container. At this time, the concave portion of the muscle surface forms a space with respect to the heating surface. Accordingly, the amount of heat supplied from the heating surface of the cooking container to the object to be cooked is reduced by the amount of the formed space, and the temperature increase rate of the central portion (core temperature) is reduced. That is, the state factor 1 is a factor that represents a state in which the heat transfer rate changes depending on the degree of the uneven portion, that is, the ratio of the actual heating contact area to the heating-side projected area of the object to be cooked.
- State factor 2 is a factor that represents a state in which the temperature increase rate of the center temperature (core temperature) of the object to be cooked is reduced depending on the thickness of the object to be cooked. That is, when the distance to the center of the object to be cooked increases (thickens), this is a factor resulting from the change in the rate of moisture flow out of the object to be cooked by heating.
- the myocytes of the object to be cooked contract due to heating. Shrinkage pushes the internal moisture bound to the muscle cells.
- the extruded water passes between the muscle fibers that make up the muscle cells and escapes to the surface of the object to be cooked. Therefore, it is considered that the length of the path through which water escapes, the change in pressure (speed) at which water flows out due to muscle contraction, and the like affect the outflow rate of water from the object to be cooked. Thereby, the temperature increase rate of the center temperature (core temperature) of a to-be-cooked object reduces.
- the state factor 3 is a factor related to the ratio of parts other than the muscle part.
- the material to be cooked is beef, it is the ratio of the part other than the muscle part such as the ratio of fat and the ratio of bone in rib steak.
- the state factor 3 is not necessary.
- a fish is cooked in a single state from the head to the tail, a bone is added in addition to the muscle and skin. Therefore, the state factor 3 which shows the ratio of parts other than a muscle part is required.
- the weight of beef rib steak is 300 g
- the muscle part is 200 g
- the remaining 100 g is the bone part weight.
- the weight change due to heating is large at 200 g of the muscular part. Therefore, when the proportion of the bone part is larger than the bone part (100 g) of the rib steak, such as the weight of the muscle part 150 g and the bone part weight 150 g at the same weight 300 g, the weight is larger than the muscle part weight 200 g.
- the rate of change decreases. That is, even when the overall weight is the same, if the ratio of the muscle part and the bone part of the cooked food is different, a difference in the weight change rate occurs. Therefore, the state factor 3 is set to more accurately grasp the state of the cooking object during heating.
- the three-level classification is an example, and is not limited to this.
- the ratio of the actual heating contact area to the heating-side projected area of the cooking object is set to three levels (high / medium / low) of 100%, 75%, and 50% (high / medium / low).
- the weight change rate and the temperature rise rate of the center temperature were confirmed.
- the thickness of the object to be cooked is set to three levels (high / medium / low) of 30 mm, 20 mm, and 10 mm, and the weight change rate and the temperature increase rate of the center temperature are confirmed with the sample of the same weight of the object to be cooked. did.
- the bone percentage is 30%, 20%, 10%, or the fat percentage is 10%, 6%, 3% (high / medium). / Low), and the weight change rate and the temperature increase rate of the center temperature were confirmed in the sample of the cooked material having the same weight.
- FIG. 4 is a diagram showing an example of a calibration curve at the level in state factor 2 (medium: thickness of cooked object 20 mm).
- the calibration curve shown in FIG. 4 is information of two linear correlation lines indicating a first memory state weight value, a second memory state weight value at each predetermined time, and a memory state core temperature value at each predetermined time by a linear curve. Is stored in the information storage unit 17 of the control unit 4.
- 5A to 6C show three-level calibration curves in the state factors 1 to 3 by changing the first memory state weight value, for example, when the cooked material is beef steak, for example.
- FIGS. 5A to 5D illustrate cases where the first memory state weight value is set to 100 g, 150 g, 200 g, and 250 g.
- 6A to 6C similarly illustrate cases where the first memory state weight value is set to 300 g, 350 g, and 400 g.
- FIGS. 5A to 6C are diagrams in which a plurality of reference weight values are set at equal intervals (every 50 g) from the low weight value (100 g) to the high weight value (400 g) as the first memory state weight values. Show. Then, with respect to the set reference weight value of the first storage state weight value, information on the second storage state weight value and the storage state core temperature value is collected in advance and stored in the information storage unit 17 of the control unit 4. .
- the calibration curves shown in FIGS. 5A to 6C show only the calibration curve obtained from the first memory state weight value and the second memory state weight value, and the calibration curve of the memory state core temperature value is not shown. .
- the gradient (M1), gradient (M2), to -gradient (M9) shown in the figure respectively indicate three-level (high / medium / low) calibration curves for state factors 1 to 3.
- the three levels of calibration curves obtained by subdividing the state factors 1 to 3 are information that does not match each other. Therefore, by using these calibration curves, the internal state of the object to be cooked can be determined in more detail based on each calibration curve.
- the cooking device of the present embodiment is configured.
- FIG. 7 is a diagram showing the calculation of the gradient (A) in the heating cooker.
- the user places the cooking container 1 used for cooking on the top plate 2 at a predetermined position corresponding to the heating unit 3. Then, the user puts a predetermined amount of oil or the like into the cooking container 1. Thereby, the preparation for cooking of a to-be-cooked object is completed.
- the user can select the type of food to be cooked (for example, beef / pork / chicken / sawara / salmon) and the type of cooking method (for example, grilled) from the cooking menu of the operation display unit 8. Cooking / fried cooking etc.). Furthermore, the user selects the start of “finish determination cooking” from the menu of the operation display unit 8. At the time of selection, the control unit 4 holds the detection output signal output from the weight detection unit 7 and displays “0 g” on the operation display unit 8 using this as a reference weight.
- the type of food to be cooked for example, beef / pork / chicken / sawara / salmon
- the type of cooking method for example, grilled
- control unit 4 controls the heating unit 3 to start heating the cooking container 1.
- control unit 4 automatically sets the heating temperature to the reference temperature condition corresponding to the selected combination of the type of cooking object and the type of cooking method, and starts heating. For example, when the user selects “beef” as the type of food to be cooked and “baked cooking” as the type of cooking method, the core temperature values corresponding to the combinations stored in advance in the information storage unit 17 are stored. Set.
- the heating start of the object to be cooked is set to start at a reference temperature condition of 170 ° C., for example.
- the temperature of the cooking vessel 1 is detected by the temperature of the bottom surface of the cooking vessel 1 by a temperature detection unit (not shown) arranged immediately below the top plate 2 at the heating position of the cooking vessel 1.
- a temperature detection unit not shown
- the operation display unit 8 displays a signal that prompts the start of charging of the cooking object (beef in the above), and informs the user. .
- the control unit 4 detects the amplified amount of the detection output signal.
- the detection output signal from the weight detection unit 7 has an amplitude (variation) centered on the weight of the cooking object. Therefore, the control unit 4 waits for the detection of the detection output signal for a predetermined time until the amplitude of the detection output signal approaches zero. When the amplitude approaches 0 or when a predetermined time has elapsed, the control unit 4 converts the detection output signal and calculates the weight of the input cooking object.
- control part 4 memorize
- the control unit 4 measures the weight of the object to be cooked, for example, about every 1 second, and stores it in the information storage unit 17 as the second weight value. Then, the control unit 4 calculates the averaged linear value shown in FIG. 7 from the first weight value and each second weight value measured every second for about 30 seconds from the time when the first weight value is stored. Calculate the correlation line. Thereby, the gradient (A) of the weight change rate per unit time of the object to be cooked is derived by calculation.
- each plot point shown in FIG. 7 is the value of the second weight value detected about every 1 second.
- the linear curve shown in FIG. 7 is a correlation line obtained by averaging the plotted points. Thereby, the slope of the correlation line obtained by the calculation is derived as “gradient (A)” of the weight change rate.
- control unit 4 corresponds to the combination of the derived gradient (A) and the type of cooking object and the type of cooking method selected at the start of the information stored in the information storage unit 17 in advance. From the above, each state factor described above is selected.
- the control unit 4 stores each state factor of the first storage state weight value closest to the first weight value of the input cooking object in the information storage unit 17. Select from the information you have. For example, in the case of the above-mentioned steak meat (220g), the control part 4 selects the information group of the 1st memory
- control unit 4 calculates the weight change rate calculated from the first storage state weight value and the second storage state weight value of each state factor corresponding to the first storage state weight value 200g. Are read from the information storage unit 17 (M1, M2, M3... M9).
- the thick line shown in FIG. 9 indicates a linear correlation line calculated from the weight change of the steak meat (220 g) shown in the previous example.
- the calculated correlation line is the middle level among the gradient (M4), gradient (M5), and gradient (M6) indicating the three levels of state factor 2. It can be seen that a gradient state close to the gradient (M5) is shown. Therefore, the control unit 4 selects the intermediate level gradient (M5) from among the state factors 2.
- control unit 4 controls the heating unit 3 so that the value of the gradient (MX) of the weight change rate of the state factor of the selected cooked object matches the value of the gradient (A) of the weight change rate of the cooked product.
- the heating conditions are controlled as follows.
- control unit 4 controls the heating unit 3 to increase the heating temperature by 5 ° C.
- control unit 4 controls the heating unit 3 to lower the heating temperature by 5 ° C.
- the heating temperature is controlled by the drive control unit 10 of the control unit 4 so that the inverter 9 is driven so that the high-frequency current output to the induction heating coil as the heating unit 3 gradually increases or decreases.
- the drive control unit 10 monitors the voltage, current, and power of the inverter 9.
- the drive control unit 10 confirms that the inverter 9 is operating within the set region.
- the drive control unit 10 drives the inverter 9 to heat the cooking container 1 so that the instructed heating temperature is reached.
- the control unit 4 sets the weight at the time when the heating condition is changed so that the selected gradient (M5) and the gradient (A) of the object to be cooked coincide with each other.
- the information is stored in the information storage unit 17 again.
- the initial first weight value (for example, 220 g) stored at the start of heating is distinguished as the first weight value (A) and used in the information storage unit 17 to be used for calculations described later.
- the control unit 4 detects the weight of the object to be cooked approximately every 1 second and stores it as the second weight value, as described with reference to FIG. To do. And the control part 4 carries out the 1st weight value (B) and the 1st weight value (B) every about 1 second for about 10 seconds from the time of memorize
- the averaged linear correlation line shown in FIG. 10 is calculated from each second weight value stored in (1). Thereby, the gradient (B) of the weight change rate per unit time is derived by calculation.
- control unit 4 performs a comparison operation on the derived gradient (B) and the gradient (MX) of the state factor selected before the heating condition change based on (Equation 1) shown below.
- FIG. 10 also shows the gradient (M5) selected in the above example before changing the heating conditions.
- control unit 4 performs a comparison operation on the newly calculated gradient based on (Equation 1).
- the control unit 4 repeatedly performs the heating control of the heating unit 3 and the above calculation until the difference between the calculated gradient and the gradient (MX) falls within a predetermined set value range.
- the difference from the gradient (MX) falls within the predetermined set value range
- the second weight value and the second stored state weight value change within a substantially constant difference range.
- the stored state core temperature value correlated with the second stored state weight value which is opposite to the second weight value, substantially matches the core temperature value of the object to be cooked.
- the control unit 4 determines that the finished state of the object to be cooked during heating is in an optimum state.
- control part 4 stops the heating of the cooking container 1 by the heating part 3.
- FIG. At the same time, the control unit 4 notifies the user through the operation display unit 8 that cooking has been completed.
- the correlation between the change in the weight of the object to be cooked by heating and the change in the core temperature can be matched more accurately. Therefore, the state of the cooking object, such as the ratio of the actual heating contact area to the heating-side projected area of the cooking object, the thickness of the cooking object, or the ratio of proteins other than protein and moisture that form the muscle part of the cooking object Even if they are different, the state of the object to be cooked can be estimated accurately.
- the control part 4 can control the heating part 3 on suitable heating conditions according to the internal heat-transfer state in the state of a to-be-cooked item. That is, the finished state of the core temperature can be accurately determined from the change in the weight of the object to be cooked.
- the configuration in which the first weight value (A) detected at the start of the heat treatment is displayed on the operation display unit 8 is described as an example, but the present invention is not limited to this.
- the ratio of the second weight value with respect to the first weight value (A) may be displayed on the operation display unit 8.
- the relative weight value after cooking of a to-be-cooked object may be described in a cookbook etc. as a reference value. Therefore, by displaying the ratio on the operation display unit 8, the user can visually grasp the change in the state of the object to be cooked.
- MX gradient of the weight change rate of the state factor of the selected cooked object.
- the present invention is not limited to this.
- the to-be-cooked item is beef steak
- it may be displayed on the operation display unit 8 with expressions such as “rare”, “medium”, and “weldan” corresponding to the core temperature value, and may be selected by the user. This makes it easier for the user to sensuously select a desired finished state.
- it may be configured such that the user can change the setting of the stored core temperature value to the previously set favorite core temperature value. Thereby, from the next time, the user can be automatically informed of the finished state of his / her preference. As a result, the convenience of the heating cooker is further improved.
- a calibration curve (first memory state weight value, second memory state weight value) that is optimal for each state factor, instead of the reference heating temperature condition, (Memory state core temperature value) information is stored together. Therefore, after selecting a state factor as the state of the object to be cooked, it can be changed to a calibration curve for an optimal heating change in the state factor. Thereby, heating control of the to-be-cooked object can be performed to match the changed calibration curve. As a result, the finished state can be determined stably under optimum heating conditions regardless of the state of the object to be cooked.
- the state factor 3 has been described as an example in which the ratio of the protein other than the protein that forms the muscle part in the food to be cooked and moisture is used, but the present invention is not limited thereto.
- the condition factor 3 may be set by distinguishing between “with bone” and “without bone” by providing “meat with bone” in the selection of the type of cooking object. Thereby, even in the case of “bone meat”, the core temperature can be estimated more accurately and cooked.
- the heating part 3 was made into the induction heating coil and the structure which induction-heats the cooking vessel 1 was demonstrated to the example, it is not restricted to this.
- heating by an electric heater or the like, or heating by a direct fire such as gas may be used.
- versatility improves.
- the heating cooker of the present embodiment has almost the same configuration as the heating cooker of the first embodiment, but the method for calculating the core temperature value of the object to be cooked is different. Since the other configuration and method are the same, different portions will be described.
- the information storage unit 17 of the heating cooker sets and stores a state factor 1, a state factor 2, and a state factor 3, which will be described below, corresponding to the type of object to be cooked.
- State factor 1 is a factor related to the ratio of the actual heating contact area to the projected area of the cooking object on the heating side.
- the state factor 2 is a factor relating to the thickness of the object to be cooked.
- the state factor 3 is a factor relating to a ratio other than the protein and moisture that form the muscle structure of the cooking object.
- the information storage unit 17 divides the state factors 1, 2, and 3 into, for example, three levels of high / medium / low, and stores the first stored state weight value, Two memory state weight values and memory state core temperature values are stored as subdivided information.
- the first memory state weight values in the state factors 1, 2, and 3 are all set to the same reference weight value according to the type of the food.
- the reference weight value is set to 200 g as shown in FIG.
- the information storage unit 17 stores information on the calibration curve obtained from the first storage state weight value and the second storage state weight value at each level in the state factors 1, 2, and 3 with respect to the reference weight value.
- the calibration curve shown in FIG. 12 shows only the calibration curve obtained from the first memory state weight value and the second memory state weight value, and the calibration curve of the memory state core temperature value is not shown.
- the cooking device of the present embodiment is configured.
- FIG. 13 is a diagram comparing the gradient (MX) information stored in the information storage unit 17 in the heating cooker and the gradient (A) calculated from the weight detection.
- the user selects the type of cooking object to be cooked and the type of cooking method from the cooking menu of the operation display unit 8. select.
- control part 4 displays "0g" on the operation display part 8 by making the weight which the weight detection part 7 detected in the state without a to-be-cooked object into a reference
- control unit 4 controls the heating unit 3 to start heating the cooking container 1 and raises the temperature to, for example, the temperature of the reference temperature condition.
- control unit 4 calculates the gradient (A) of the weight change rate per unit time from the averaged linear correlation line based on each measured value.
- control unit 4 stores in advance in the information storage unit 17 corresponding to the combination of the gradient (A) obtained by calculation and the type of cooking object and the type of cooking method selected at the start.
- the gradient (M1, M2, M3... M9) of the weight change rate calculated from the first storage state weight value and the second storage state weight value of each state factor is read from the information storage unit 17.
- control unit 4 executes a comparison operation of (
- the thick line shown in FIG. 13 shows the correlation line averaged from the value of detecting the weight change of the cooking object (steak meat: 300 g) due to heating.
- FIG. 13 shows that the gradient (M5) which is the intermediate level of the state factor 2 and has the smallest difference from the gradient (A) derived by the calculation is selected.
- control unit 4 makes the gradient of the weight change rate (MX; corresponding to M5) of the state factor of the selected cooking object and the value of the gradient (A) of the weight change rate of the cooking object match.
- the heating conditions of the heating unit 3 are controlled.
- the control unit 4 stores the weight at the time of changing the heating condition as the first weight value (B) in the information storage unit 17 again.
- the first weight value stored at the start of heating is used as a first weight value (A) for use in calculations described later, and is left in the control unit 4 as it is.
- the control unit 4 detects the weight of the object to be cooked about every second, as described with reference to FIG. Store as a double weight value. And the control part 4 is shown in FIG. 14 from each 1st weight value (B) and each 2nd weight value memorize
- control unit 4 shows the derived gradient (B) and the gradient of the state factor selected before changing the heating condition (MX; corresponding to M5) based on (Equation 1) shown in the first embodiment. , Perform comparison operations.
- FIG. 14 also shows the selected gradient (M5) before changing the heating conditions.
- control unit 4 controls the heating temperature again to control the cooking container 1. Adjust the temperature.
- control unit 4 newly calculates a gradient, and performs a comparison operation on the calculated gradient based on (Equation 1).
- control unit 4 repeatedly performs the heating control of the heating unit 3 and the above calculation until the difference between the calculated gradient and the gradient (MX) falls within a predetermined set value range.
- the second weight value and the second stored state weight value change with a relative relationship of a certain ratio.
- the core temperature values are substantially the same at the point where the moisture evaporation rate matches between the change in the weight of the food to be cooked and the calibration curve of the selected state factor.
- control unit 4 uses the following (Equation 2) to change the second weight value and the second storage state weight value in which the moisture evaporation rate matches the first storage state weight value and the second storage value. It calculates from the correlation line of the weight change rate calculated from a state weight value.
- the controller 4 determines the current core temperature value of the cooking object from the stored state core temperature value that matches the second stored state weight value (B) that approximates the second weight value. Make an estimate.
- Second memory state weight value (B) (first memory state weight value ⁇ first weight value (A)) ⁇ second weight value (Expression 2)
- the control part 4 repeats the comparison calculation which estimates the said core temperature value until it becomes a predetermined core temperature value.
- the control unit 4 determines that the finished state of the object to be cooked while heating is in an optimum state.
- control part 4 stops the heating of the cooking container 1 by the heating part 3.
- FIG. At the same time, the control unit 4 notifies the user that cooking has been completed via the operation display unit.
- the amount of information to be checked in advance can be reduced, it is not necessary to store enormous information. As a result, the memory capacity of the information storage unit 17 can be reduced.
- the heating cooker according to the present invention includes a heating unit that heats the cooking object, a weight detection unit that measures the weight of the cooking object, and a selection unit that selects the type of cooking object to be heated. And an information storage unit that stores information corresponding to the type of cooking object selected by the selection unit, a weight detection result measured by the weight detection unit, and heating based on the type of cooking object selected by the selection unit.
- the control unit is a first weight value of the cooking object measured by the weight detection unit, a second weight value of the cooking object measured by the weight detection unit during heating by the heating unit after measuring the first weight value, It compares with the information memorize
- the food to be cooked is controlled to be heated under heating conditions that match the internal heat transfer state of the food to be cooked.
- the control part can estimate a core temperature accurately from the weight change of a to-be-cooked item, and can judge the finishing state of a to-be-cooked item.
- the object to be cooked can be finished in an optimal state.
- the cooking device of the present invention sets the first weight value of the object to be cooked to the first object when the object to be cooked is heated, when the first predetermined time is reached from the start of heating, and from the start of heating. It is set as the value which measured the to-be-cooked object in the weight detection part in at least one timing at the time of predetermined temperature attainment. Furthermore, the second weight value of the object to be cooked reaches the second predetermined temperature when the second predetermined time is reached from the time when the first weight value is measured, and from the start of heating different from the first predetermined temperature. It is good also as a value which measured the to-be-cooked object in the weight detection part in at least one timing of time.
- the state of the cooking object forms a ratio of the actual heating contact area to the heating-side projected area of the cooking object, the thickness of the cooking object, and muscles in the cooking object. What is necessary is just to be at least any one of ratios other than protein and moisture.
- the information stored in the information storage unit corresponds to the first stored weight value of the cooking object corresponding to the type of the cooking object, and the second value at the predetermined heating time point. It suffices to have a stored weight value, and a storage core temperature value of the cooking object estimated from the first stored weight value and the second stored weight value.
- the state of the core temperature of the cooking object can be estimated from the amount of change in the weight of the cooking object with respect to the heating time.
- the information stored in the information storage unit corresponds to the first stored state weight value of the cooking object corresponding to the state of the cooking object, and the first heating state at the predetermined heating time point.
- Two memory state weight values, a weight change rate calculated from the first memory state weight value and the second memory state weight value, and storage of the cooking object estimated from the first memory state weight value and the second memory state weight value And a state core temperature value.
- control part of the heating cooker of this invention should just control a heating part so that it may become the weight change rate memorize
- the controller of the heating cooker of the present invention controls the heating unit so that the rate of weight change stored in the information storage unit corresponds to the estimated state of the cooking object being heated, and When the control unit reaches the second weight value proportional to the second memory state weight value corresponding to the predetermined memory state core temperature value, the control unit stops the heating unit or notifies the predetermined memory state core temperature value.
- the control unit stops the heating unit or notifies the predetermined memory state core temperature value.
- the cooking device of the present invention includes an operation display unit in the cooking device.
- a control part controls a heating part so that it may become the weight change rate memorize
- the heating cooker control unit of the present invention controls the heating unit so that the weight change rate stored in the information storage unit corresponds to the estimated state of the cooking object being heated,
- the predetermined storage state core temperature value may be changeable when the second storage state weight value corresponding to the storage state core temperature value is reached.
- the user's favorite finish state is stored, it can be heated to the stored favorite finish state at the next cooking. As a result, the usability of the heating cooker is improved.
- the cooking device of the present invention can accurately estimate the core temperature of the cooking object from the change in the weight of the cooking object due to heating, and finish the cooking object in an optimal state. Therefore, it is useful for the use of the various cooking-by-heating machine by which the cooking by the appropriate finishing state is requested
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Induction Heating Cooking Devices (AREA)
- Electric Stoves And Ranges (AREA)
- Cookers (AREA)
Abstract
被調理物を加熱する加熱部(3)と、被調理物の重量を計測する重量検知部(7)と、選択した被調理物の種類に対応する情報を記憶した情報記憶部(17)と、制御部(4)を備える。制御部(4)は、重量検知部(7)で計測した被調理物の第一重量値と、第一重量値を計測後、加熱部(3)により加熱された被調理物の重量を重量検知部(7)で計測した第二重量値と、選択した被調理物の種類に対応する情報記憶部(17)に記憶されている情報と、を比較し、加熱中の被調理物の状態を推定して加熱調理する。これにより、被調理物を最適な状態に仕上げることができる加熱調理器を提供する。
Description
本発明は、一般家庭、レストランおよびオフィスなどで使用される加熱調理器に関する。
近年、庫内に熱風や過熱スチームを循環させるオーブンや、システムキッチンなどに組み込まれて、鍋やフライパンなどの調理容器を加熱し、食材を加熱する加熱調理器が広く普及してきている。システムキッチンに組み込まれる加熱調理器には、誘導電磁コイルにより誘導加熱する誘導加熱調理器、ガスの直火によるガス調理器、電熱ヒータなどで加熱するヒータ加熱調理器などがある。
加熱調理器は、一般的に、庫内温度や、鍋・フライパンなどの調理容器の温度を計測して、調理物を加熱調理する。
それ以外に、被調理物の中心温度(芯温)などを検知し、被調理物の中心の状態を把握する機能を備える加熱調理器が提案されている(例えば、特許文献1参照)。上記加熱調理器は、針のような形態の検知針を有する温度計を備える。そして、上記検知針を被調理物に直接、差し込んで芯温を測定して検知するように構成されている。
しかしながら、特許文献1の加熱調理器は、被調理物に直接、検知針を差し込むため、被調理物に穴が開いてしまう。そのため、被調理物をお皿に盛り付けた状態において、見映えが低下する。
そこで、調理容器の温度と被調理物の重量変化を検知して、間接的に、被調理物の中心の状態を推定する機能を有する加熱調理器が開示されている(例えば、特許文献2または特許文献3参照)。
特許文献2および特許文献3の加熱調理器は、調理器本体内に調理容器と一緒に被調理物の重量を計測する重量検知部と、調理容器の温度を測定する温度検知部とを備え、以下に示す方法で被調理物の中心の状態を推定し、加熱調理している。
具体的には、特許文献2の加熱調理器は、まず、被調理物の加熱前の初期重量を検知する。加熱開始後、加熱によって被調理物中の水分の蒸発による、被調理物の重量減少を検知する。そして、予め記憶している対象調理物の情報から、初期重量に対して最適な相対重量にまで減少した時点で加熱調理を終了させる。これにより、非接触で被調理物の芯温に代わって仕上がり状態を判断している。
しかしながら、被調理物の熱変化は、被調理物の加熱側の投影面積に対して、実際の調理容器に接する加熱面積の割合や、被調理物の厚みに依存して、仕上がり状態が変化する。また、例えば肉類での脂肪分や骨の割合、魚のソテーが切り身の状態であるのか、それとも頭から尾ビレまでの一尾の状態であるのかなど被調理物の筋肉構造を形成するタンパク質と水分以外の割合、すなわち被調理物の状態により内部への熱の伝わり方が違う。これにより、初期重量が同じでも、焼き上がり方、すなわち、被調理物からの水分の蒸発量が変化する。そのため、加熱前の初期重量に対する相対重量が、被調理物の状態によって変わる。その結果、特許文献2の加熱調理器では、安定して被調理物の仕上がり状態を検知することが困難となる。
一方、特許文献3の加熱調理器は、まず、被調理物の時間当たりの重量変化と、供給された加熱エネルギーの継時的な推移とから、被調理物の化学ポテンシャルを算出する。加熱調理器は、算出した化学ポテンシャルの値により、被調理物の状態を推定して調理する構成である。なお、化学ポテンシャルは、調理物が有する特有の性質である。
上記加熱調理器は、計測した時間当たりの重量変化と、供給した加熱エネルギーの継時的な推移とから、算出した化学ポテンシャルと、被調理物の持つ化学ポテンシャルとが一致する、との考えに基づいている。そのため、算出した化学ポテンシャルの値と、記憶装置内に記憶した食材の化学ポテンシャルの情報とを比較することにより、どの食材が調理されているのか推定できると説明している。つまり、上記加熱調理器は、化学ポテンシャルの算出により、被調理物の芯温に代わって、非接触で仕上がり状態を判断して、加熱調理する構成である。
しかしながら、被調理物の熱変化は、被調理物の状態により、内部への熱の伝わり方が違う。そのため、加熱による被調理物からの水分の蒸発量が変化し、単位時間当たりの重量変化率に差が生じる。つまり、特許文献3の算出した化学ポテンシャルの値を用いても、安定して被調理物の仕上がり状態を検知できない。
本発明は、被調理物の重量変化から精度良く芯温の仕上がり状態を判断して調理できる加熱調理器を提供する。
つまり、本発明の加熱調理器は、被調理物を加熱する加熱部と、被調理物の重量を計測する重量検知部と、加熱する被調理物の種類を選択する選択部と、選択部で選択された被調理物の種類に対応する情報を記憶する情報記憶部と、重量検知部で計測された重量検知結果および選択部で選択された被調理物の種類に基づいて加熱部を制御する制御部を備える。制御部は、重量検知部で計測した被調理物の第一重量値と、第一重量値を計測後、加熱部により加熱された被調理物の重量を重量検知部で計測した第二重量値と、選択部で選択した被調理物の種類に対応する情報記憶部に記憶されている情報と、を比較して、加熱中の被調理物の状態を推定して加熱調理する構成を備える。
この構成によれば、被調理物の重量変化に基づいて、被調理物の加熱側投影面積に対する、実加熱接触面積の割合、被調理物の厚み、被調理物の筋肉部を形成するタンパク質と水分以外の割合などの被調理物の状態を推定する。そして、制御部は、推定した被調理物の状態に基づいて、被調理物の内部伝熱状態に合わせた加熱条件で加熱部を制御する。つまり、制御部は、被調理物の重量変化から、精度良く芯温を推定して、仕上がり状態を判断する。これにより、被調理物を最適な状態に仕上げることができる加熱調理器を提供する。
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、この実施の形態によって本発明が限定されるものではない。
(実施の形態1)
以下に、本発明の実施の形態1の加熱調理器について、図1を参照しながら、説明する。
以下に、本発明の実施の形態1の加熱調理器について、図1を参照しながら、説明する。
図1は、本発明の実施の形態1における加熱調理器の概略構成を示す模式断面図である。
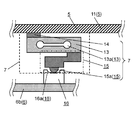
図1に示すように、本実施の形態の加熱調理器は、調理容器1と、加熱部3と、制御部4と、トッププレート2と鋼板11から構成される筐体5と、支持部6と、重量検知部7と、載置台12などで構成される。調理容器1は、熱を伝達して調理する、被調理物を収納する。加熱部3は、調理容器1を介して被調理物を加熱する。制御部4は、インバータ9、駆動制御部10、情報記憶部17などで構成され、加熱部3の加熱量などを制御する。筐体5は、上面がトッププレート2で構成され、少なくとも加熱部3と制御部4などを内蔵する。つまり、筐体5のトッププレート2は、調理容器1を載置する載置面を構成する。重量検知部7は、被調理物の重量を計測する。
また、本実施の形態の加熱調理器は、使用者が入力する操作の受け付けや、加熱調理器からの情報を表示する操作表示部8を有する。操作表示部8は、制御部4に接続され、使用者が視認可能な位置に配置される。操作表示部8は、使用者が加熱する被調理物の種類を選択する選択部と、重量検知部7で計測した重量値などを表示する表示機能などを備える。
加熱部3は、高周波電流の供給により高周波電磁界を発生し、調理容器1を誘導加熱する、例えば誘導加熱コイルで構成される。
加熱部3は、制御部4を構成するインバータ9を介して駆動制御部10と接続される。駆動制御部10は、インバータ9を介して、高周波電流の周波数、電流量などを調節し、加熱部3である誘導加熱コイルから発生する高周波電磁界を制御する。
つまり、駆動制御部10は、主にマイクロコンピュータとその周辺回路などで制御部4の一部として構成され、インバータ9の駆動を制御する。具体的には、駆動制御部10は、操作表示部8を介して使用者が入力した操作や、インバータ9に供給する電流、電圧、電力などの情報に基づいて、インバータ9の駆動を制御する。これにより、駆動制御部10は、インバータ9から加熱部3である誘導加熱コイルへ供給する高周波電流を調節する。そして、駆動制御部10は、調理容器1を加熱する電力を変化させて、被調理物を適切に加熱する。
筐体5の下半分は、上述したように、例えば厚さtが1mm程度の鋼板11で構成される。鋼板11は、上面が開放した箱状で形成される。箱状の鋼板11の上端部分は、外側方向に折り曲げられてフランジ5aが形成される。フランジ5aは、筐体5の上半分を構成するトッププレート2の下面に当接される。筐体5の鋼板11は、例えばネジなどで、トッププレート2に固定される。これにより、筐体5は、箱状の鋼板11とトッププレート2で、略密閉空間(密閉空間を含む)を形成する。
筐体5の略密閉空間(密閉空間を含む)には、加熱部3、制御部4などが内蔵される。
つぎに、本実施の形態の加熱調理器の支持部6周りの構成について、図2を用いて説明する。
図2は、同加熱調理器の支持部6の周辺構成の一例を示す概略構成図である。
図2に示すように、支持部6は、上記筐体5の下半分を形成する鋼板11と略同一(同一を含む)の形状であるフランジ6aを有する箱状の鋼板で構成される。支持部6は、筐体5の箱状の鋼板11を収納できるように、鋼板11より一回り大きい形状を備える。
支持部6の底面6bには、大きい開口部6bbが形成される。底面6bの開口部6bbは、支持部6の強度を確保しつつ、重量をできるだけ低く抑えるように考慮して形成される。
支持部6のフランジ6aは、筐体5を収納した際に、トッププレート2の外周から、はみ出さないような幅および長さ形状で形成される(図1参照)。
なお、支持部6の高さは、筐体5を収納した際に、トッププレート2の下面と支持部6のフランジ6aの上面との間に、例えば1mm程度の空隙が形成されるように設定される。
支持部6は、フランジ6a以外の部分が、調理などを行う、キッチン台を構成する載置台12の開口部12aを介して、収納される。フランジ6a部分は、載置台12の開口部12aの端部12aaと当接する寸法、形状で設けられる。これにより、支持部6は、載置台12から吊り下がるように載置される。このとき、上述したように、支持部6のフランジ6aの上面とトッププレート2の下面との間に、空隙が形成される位置関係で載置される。
具体的には、上記位置関係で筐体5および支持部6が載置台12に設置される場合、載置台12の上面12bから上方に出る部分の高さは、トッププレート2の厚み約4mm、支持部6の鋼板の厚みの約1mm、トッププレート2と支持部6のフランジ6a間の空隙1mmの合計約6mmとなる。これにより、高さを抑えた、より薄い状態で加熱調理器が配置される。
つぎに、上記加熱調理器の重量検知部7およびその周りの構成について、図3を用いて説明する。
図3は、同加熱調理器の重量検知部7の周辺構成の一例を示す概略構成図である。
重量検知部7は、図3に示すように、例えばロードセルで構成される重量センサ13と、固定接続部14と、荷重伝達部15などを備える。固定接続部14は、重量センサ13と筐体5の鋼板11とを接続する。荷重伝達部15は、筐体5や調理容器1などの荷重を、後述する荷重受け部16を介して支持部6へ伝えて支持する。
重量センサ13は、具体的には、貫通孔13aを有するビーム型のロードセルで構成される。ビーム型のロードセルは、部品高さが約2cm程度であるが、非常に優れた検知精度を備える。
荷重伝達部15は、先端に凸レンズ形状の凸状部15aを備える。荷重伝達部15の凸状部15aは、支持部6の対向する位置に設けられる荷重受け部16のレンズ形状の凹状部16aと当接して載置される。このとき、荷重伝達部15の凸状部15aと、荷重受け部16の凹状部16aとが点接触により接続される。
なお、支持部6は、上述したように、筐体5の鋼板11部分を収納できるように一回り大きな形状を有する。支持部6の高さは、筐体5を収納した際に、トッププレート2と、支持部6のフランジ6aとの間に1mm程度の空隙が形成されるように設定される。これにより、筐体5と支持部6とは、重量検知部7のみを介して接続される位置関係で配置される。
つまり、筐体5は、図1に示すように、載置台12の開口部12aの開口面よりも低い位置で、重量検知部7を介して、支持部6で支えられる。これにより、重量検知部7は、筐体5およびトッププレート2上に載置された調理容器1などの被載置物の重量が検知できる状態となる。
重量検知部7は、図2に示すように、例えば筐体5の鋼板11の底面5bの四隅の凹部11b(図1参照)に配置され、それぞれにかかる荷重を検知する。なお、凹部11bは、鋼板11の底面5bからトッププレート2側に窪んで形成される。このとき、凹部11bの深さは、少なくとも重量検知部7の荷重伝達部15の一部が、鋼板11の最下部から下方に突出ように形成される。
つまり、重量検知部7は、筐体5の鋼板11における外側の底面5bの凹部11bに配置される。これにより、重量検知部7は、筐体5と支持部6との間に配置される。この配置により、例えば長期間の使用や衝撃などによって重量検知部7の性能が低下した場合、筐体5ごとの交換ではなく、重量検知部7だけの交換で対応できる。その結果、簡単な交換作業で、加熱調理器を継続して使用することができる。
重量検知部7で検知した出力信号は、図1に示す信号線7aを介して、制御部4の駆動制御部10に伝達される。制御部4は、入力された出力信号を重量に換算し、換算した重量を操作表示部8に表示する。
また、制御部4は、上述したように、駆動制御部10の他に、情報記憶部17を内包する。
情報記憶部17は、操作表示部8の選択部で選択された被調理物の種類に対応する情報などを記憶する。
具体的には、情報記憶部17は、被調理物の種類に対応して、所定の被調理物の重量と、第一記憶重量値と、第二記憶重量値と、複数の第二記憶重量値の情報と、被調理物内部の中心温度(芯温)の記憶芯温値の情報などを記憶する。第一記憶重量値は、所定の温度で加熱する際における加熱開始時の重量である。第二記憶重量値は、加熱開始時の第一記憶重量値から、所定時間経過した加熱後の重量である。複数の第二記憶重量値の情報は、第二記憶重量値を所定時間の段階的な経過とともに変化する重量の複数の情報である。記憶芯温値の情報は、記憶した第二記憶重量値の各所定時間における被調理物内部の中心温度(芯温)を記憶芯温値として記憶する情報である。
さらに、情報記憶部17は、上記第一記憶重量値、第二記憶重量値、記憶芯温値を、各種の被調理物の状態に対して、被調理物の伝熱作用に影響を与える因子として、以下で説明する状態因子1、状態因子2、状態因子3を設定して記憶する。
状態因子1は、被調理物の加熱側の投影面積に対して、実際に、被調理物が調理容器に接触する加熱接触面積の割合に関する因子である。状態因子2は、被調理物の厚みに関する因子である。状態因子3は、被調理物中の筋肉構造を形成するタンパク質と水分以外の比率に関する因子である。
このとき、情報記憶部17は、上記状態因子1、2、3を、例えば高/中/低の3水準に分けて、状態因子1、2、3の各水準における第一記憶状態重量値、第二記憶状態重量値、記憶状態芯温値を細分化した情報で記憶する。
まず、状態因子1について、被調理物が鶏モモ肉の切り身のソテーの場合を例に、説明する。この場合、鶏モモ肉の切り身は、平滑な皮面に対して、筋肉面は凹凸した状態である。そのため、鶏モモ肉の筋肉面を焼く際、調理容器の加熱面と接するのは筋肉面の凸部分のみとなる。このとき、筋肉面の凹部は、加熱面に対して空間を形成する。これにより、形成された空間の分、調理容器の加熱面からの被調理物への熱供給量が減り、中心部分(芯温)の温度上昇率が減少する。つまり、状態因子1は、上記凹凸部の度合い、すなわち被調理物の加熱側投影面積に対する実加熱接触面積の割合の程度によって、伝熱速度が変わるという状態を表す因子である。
状態因子2は、被調理物の厚みにより、被調理物の中心温度(芯温)の温度上昇率が減少する状態を表す因子である。すなわち、被調理物の中心までの距離が増える(厚くなる)と、加熱による被調理物内部からの水分の流出速度が、変化することに起因する因子である。
つまり、加熱により、被調理物の筋細胞が収縮する。収縮により、筋細胞に結合している内部の水分が押し出される。押し出された水は、筋細胞を構成する筋線維の間を通り、被調理物の表面へと抜け出る。そのため、水が抜け出る経路長の長さや、筋収縮による水分を流出する圧力(速度)の変化などが、被調理物からの水分の流出率に影響を与えると考えられる。これにより、被調理物の中心温度(芯温)の温度上昇率が減少する。
また、状態因子3は、筋肉部以外の部位の比率に関わる因子である。
具体的には、被調理物が牛肉の場合、脂肪分の割合や、リブステーキにおける骨の割合などの筋肉部以外の部位の比率である。
なお、被調理物が魚の切り身の場合、筋肉部と皮部のみとなるため、状態因子3は不要となる。しかし、魚を頭から尾ビレまで1尾の状態で調理する場合、筋肉部、皮部以外に、骨部が加わる。そのため、筋肉部以外の部位の比率を示す状態因子3が必要となる。
例えば、牛肉のリブステーキの重量が300gにおいて、筋肉部が200gで、残りの100gが骨部の重量である場合を例に、具体的に説明する。この場合、加熱による重量変化が大きいのは、筋肉部の200gである。そのため、同じ重量300gで筋肉部の重量150g、骨部の重量150gのように、上記リブステーキの骨部(100g)より骨部の割合より多くなると、上記筋肉部の重量200gに比べて、重量変化率が減少する。つまり、全体の重量が同じ場合でも、被調理物の筋肉部と骨部との比率が異なると、重量変化率に差が生じる。そこで、状態因子3を設定して、加熱時のおける被調理物の状態を、より正確に把握している。
以下に、状態因子1から3において、上述した3水準(高/中/低)に分ける一例について、説明する。なお、3水準の分類は例示であり、これに限られないことは言うまでもない。
まず、状態因子1では、被調理物の加熱側投影面積に対する実加熱接触面積の割合を100%、75%、50%の3水準(高/中/低)とし、同じ重量の被調理物のサンプルで、重量変化率と中心温度の温度上昇率を確認した。
状態因子2では、被調理物の厚みを30mm、20mm、10mmの3水準(高/中/低)とし、同じ重量の被調理物のサンプルで、重量変化率と中心温度の温度上昇率を確認した。
状態因子3では、被調理物の種類に応じて、骨部の割合を30%、20%、10%)、または脂肪分の割合を10%、6%、3%の3水準(高/中/低)とし、同じ重量の被調理物のサンプルで、重量変化率と中心温度の温度上昇率を確認した。
そして、予め確認した、それぞれの状態因子の3水準における加熱時間と重量変化との間の検量線、および、加熱時間と芯温変化との間の検量線を設定した。
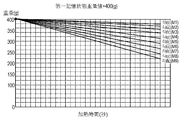
以下に、上記条件に基づいて設定した、各検量線の一例について、図4から図6Cを用いて、説明する。
図4は、状態因子2における水準(中:被調理物の厚み20mm)における検量線の一例を示す線図である。
図4に示す検量線は、第一記憶状態重量値、各所定時間における第二記憶状態重量値、および各所定時間における記憶状態芯温値を、一次曲線で示す線形の二つの相関線の情報として、制御部4の情報記憶部17に記憶されている。
また、図5Aから図6Cは、状態因子1から3における3水準の検量線を、被調理物が、例えば牛肉ステーキの場合を例に、第一記憶状態重量値を変化させて示している。
具体的には、図5Aから図5Dは、第一記憶状態重量値を100g、150g、200g、250gに設定した場合について、図示している。図6Aから図6Cは、同様に、第一記憶状態重量値を300g、350g、400gに設定した場合について、図示している。
つまり、図5Aから図6Cは、第一記憶状態重量値として、低い重量値(100g)から高い重量値(400g)までを、等間隔(50gごと)に複数の基準重量値を設定して図示している。そして、設定した第一記憶状態重量値の基準重量値に対して、第二記憶状態重量値、記憶状態芯温値の情報を予め収集し、制御部4の情報記憶部17に記憶している。
以下に、情報記憶部17に記憶される検量線の一例について、図5Aから図6Cを用いて、説明する。
なお、図5Aから図6Cに示す検量線は、第一記憶状態重量値と第二記憶状態重量値とから得られる検量線のみを図示し、記憶状態芯温値の検量線は図示していない。
また、図中に示す勾配(M1)、勾配(M2)、~勾配(M9)は、状態因子1から3における、3水準(高/中/低)の検量線を、それぞれ図示している。
ここで、図5Aから図6Cに示すように、状態因子1から3において、さらに、それを細分した3水準の各検量線は、互いに一致しない情報である。そのため、これらの検量線を用いることにより、各検量線に基づいて、被調理物の内部状態を、より詳細に判断できる。
以上のように、本実施の形態の加熱調理器が構成される。
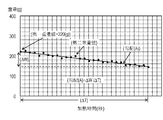
以下に、上記加熱調理器の動作および作用について、図7を用いて、説明する。
図7は、同加熱調理器における勾配(A)の演算を示す線図である。
まず、調理を開始する際、使用者は、トッププレート2上に加熱調理に使う調理容器1を、加熱部3に対応する所定の位置に載置する。そして、使用者は、調理容器1の中に、油などを所定量入れる。これにより、被調理物の調理の準備が完了する。
準備が完了すると、使用者は、操作表示部8の調理メニューから、調理を行なう被調理物の種類(例えば、牛肉/豚肉/鶏肉/サワラ/サケなど)と、調理方法の種類(例えば、焼き調理/揚げ調理など)を選択する。さらに、使用者は、操作表示部8のメニューから“仕上がり判定調理”の開始を選択する。選択した時点で、制御部4は、重量検知部7から出力される検知出力信号を保持し、これを基準重量として、操作表示部8に「0g」を表示する。
つぎに、制御部4は、加熱部3を制御して、調理容器1の加熱を開始する。このとき、制御部4は、選択した被調理物の種類および調理方法の種類の組合せに対応した基準温度条件に、加熱温度を自動で設定し、加熱を開始する。使用者が、例えば被調理物の種類を「牛肉」、調理方法の種類を「焼き調理」と選択した場合、予め情報記憶部17に記憶している、それぞれの組み合わせに対応する芯温値を設定する。
上記の場合、被調理物の加熱開始は、例えば基準温度条件の170℃でスタートするように設定される。
なお、調理容器1の温度は、調理容器1の加熱位置のトッププレート2の直下に配置した温度検知部(図示せず)で、調理容器1の底面温度により検知される。そして、底面温度が基準温度条件の温度(上記では、170℃)に到達すると、被調理物(上記では、牛肉)の投入開始を促す合図を操作表示部8に表示して、使用者に知らせる。
つぎに、使用者が調理容器1に被調理物を投入すると、重量検知部7に加わる負荷が増加し、検知出力信号が増幅される。制御部4は、検知出力信号の増幅分を検知する。このとき、被調理物を投入した直後は、慣性などにより、重量検知部7からの検知出力信号には、被調理物の重量を中心に振幅(変動)が生じる。そこで、制御部4は、検知出力信号の振幅が0に近づくまで、検知出力信号の検知を所定時間の間、待つ。振幅が0に近づいた、または所定時間経過した時点で、制御部4は、検知出力信号を変換して投入した被調理物の重量を算出する。そして、制御部4は、算出した重量を被調理物の第一重量値として、情報記憶部17に記憶する。例えば、重さ220gで厚み23mmのステーキ肉を投入した場合、制御部4は、第一重量値(A)として、約220gを情報記憶部17に記憶することになる。
つぎに、制御部4は、第一重量値を記憶した時点から、例えば約1秒毎に被調理物の重量を計測し、第二重量値として、情報記憶部17に記憶する。そして、制御部4は、第一重量値と、第一重量値を記憶した時点から約30秒間の、1秒毎に計測した各第二重量値とから、図7に示す平均化した線形の相関線を演算する。これにより、被調理物の単位時間当たりの重量変化率の勾配(A)が演算により導き出される。
なお、図7に示す各プロット点は、約1秒毎に検知した第二重量値の値である。また、図7に示す一次曲線は、プロットされた点を平均化して求めた相関線である。これにより、演算で得られた相関線の傾きが、重量変化率の「勾配(A)」として導き出される。
ここで、被調理物の重量変化について、説明する。
まず、被調理物の筋細胞を構成する筋原線維タンパク質には、水分子が結合している。加熱すると、筋細胞の筋原線維タンパク質が凝固する。これにより、筋原線維タンパク質が縮んで、筋細胞内部の水分が押し出される。押し出された水分は、調理容器1の加熱面に落ちて、蒸発する。その結果、被調理物の重量減少が起こる。
以上のようなメカニズムで、被調理物の重量変化が発生する。
つぎに、制御部4は、導き出した勾配(A)と、開始時に選択した被調理物の種類および調理方法の種類の組合せに対応して、予め情報記憶部17に記憶している情報の中から、上述した各状態因子を選択する。
具体的には、図8に示すように、制御部4は、投入した被調理物の第一重量値に最も近い第一記憶状態重量値の各状態因子を、情報記憶部17に記憶している情報の中から選択する。例えば、上述のステーキ肉(220g)の場合、第一記憶状態重量値200gの情報群を、制御部4は、記憶している情報から選択する。
つぎに、制御部4は、図9に示すように、第一記憶状態重量値200gに対応する、各状態因子の第一記憶状態重量値と第二記憶状態重量値から演算された重量変化率の勾配(M1、M2、M3・・・M9)を情報記憶部17から読み出す。
つぎに、制御部4は、図9に示す被調理物の重量変化から算出した勾配(A)と、情報記憶部17から読み出した勾配(MX:X=1から9)とを比較演算する。このとき、制御部4は、(|勾配(A)-勾配(MX)|)が最小となる勾配(MX)を比較演算する。そして、制御部4は、各状態因子における3水準のうち、最も近い状態因子の水準に相当する勾配(MX)を選択する。
ここで、図9に示す太線は、先の例で示したステーキ肉(220g)の重量変化から演算した線形の相関線を示している。このとき、演算した相関線が、ステーキ肉(220g)の厚みが23mmであることから、状態因子2の3水準を示す勾配(M4)、勾配(M5)、勾配(M6)の内、中水準である勾配(M5)に近い勾配の状態を示すことが判る。そこで、制御部4は、状態因子2の内、中水準である勾配(M5)を選択する。
つぎに、制御部4は、選定した被調理物の状態因子の重量変化率の勾配(MX)と被調理物の重量変化率の勾配(A)の値が一致するように、加熱部3の加熱条件を、以下のように制御する。
例えば、勾配(MX)>勾配(A)であれば、制御部4は、加熱温度を5℃上げるように加熱部3を制御する。一方、勾配(MX)<勾配(A)であれば、制御部4は、加熱温度を5℃下げるように加熱部3を制御する。
なお、加熱温度の制御は、制御部4の駆動制御部10で、加熱部3である誘導加熱コイルへ出力する高周波電流が徐々に増減するように、インバータ9の駆動を制御する。このとき、駆動制御部10は、インバータ9の電圧、電流、電力をモニタする。これにより、駆動制御部10は、インバータ9が設定した領域内で動作していることを確認する。そして、駆動制御部10は、指示された加熱温度になるように、インバータ9を駆動し、調理容器1を加熱する。
つぎに、制御部4は、図10に示すように、選択した勾配(M5)と被調理物の勾配(A)とが一致するように、加熱条件を変更した時点の重量を第一重量値(B)として、再度、情報記憶部17に記憶する。なお、加熱開始時に記憶した初期の第一重量値(例えば、220g)は、後述する演算に用いるため、第一重量値(A)として区別し、情報記憶部17にそのまま残す。
つぎに、制御部4は、第一重量値(B)を検知した時点から、図7で説明したと同様に、約1秒毎に被調理物の重量を検知し、第二重量値として記憶する。そして、制御部4は、上述した勾配(A)の算出と同様の方法により、第一重量値(B)と、第一重量値(B)を記憶した時点から約10秒間に、1秒毎に記憶した各第二重量値から、図10に示す平均化した線形の相関線を演算する。これにより、単位時間当たりの重量変化率の勾配(B)が演算により導き出される。
つぎに、制御部4は、導き出した勾配(B)と、加熱条件変更前に選定した状態因子の勾配(MX)とを、以下に示す(式1)に基づいて、比較演算する。なお、図10には、加熱条件変更前に、上述の例で選択した勾配(M5)を、併せて図示している。
(|勾配(B)-勾配(MX)|)<(設定値)・・・(式1)
このとき、勾配(B)と勾配(MX:この場合、M5に相当)との差分が、予め設定した所定の設定値の範囲内に収まっていない場合、再度、制御部4は、加熱部3を制御して、調理容器1の加熱温度を調整する。そして、再度、相関線を演算し、新たに、単位時間当たりの重量変化率の勾配を演算により導き出す。
このとき、勾配(B)と勾配(MX:この場合、M5に相当)との差分が、予め設定した所定の設定値の範囲内に収まっていない場合、再度、制御部4は、加熱部3を制御して、調理容器1の加熱温度を調整する。そして、再度、相関線を演算し、新たに、単位時間当たりの重量変化率の勾配を演算により導き出す。
つぎに、制御部4は、新たに算出した勾配を(式1)に基づいて比較演算する。
そして、算出された勾配と勾配(MX)との差分が所定の設定値の範囲内に収まるまで、制御部4は、加熱部3の加熱制御および上記演算を繰り返し実行する。これにより、勾配(MX)との差分が所定の設定値の範囲に収まると、第二重量値と第二記憶状態重量値とは、ほぼ一定の差分の範囲内で推移する。このとき、図11に示すように、第二重量値に相対する、第二記憶状態重量値と相関する記憶状態芯温値が、被調理物の芯温値とほぼ一致すると推定できる。
つぎに、推定した被調理物の芯温値が、設定した芯温値となった時点で、制御部4は、加熱中の被調理物の仕上がり状態が最適な状態になったと判断する。
そして、制御部4は、加熱部3による調理容器1の加熱を停止する。同時に、制御部4は、調理が完了したことを、操作表示部8を介して、使用者に知らせる。
以上のように、本実施の形態によれば、加熱による被調理物の重量変化と芯温変化との相関を、より精度良く一致させることができる。そのため、被調理物の加熱側投影面積に対する実加熱接触面積の割合や、被調理物の厚み、または、被調理物の筋肉部を形成するタンパク質と水分以外の割合などの、被調理物の状態が異なる場合でも、被調理物の状態を的確に推定できる。これにより、制御部4は、被調理物の状態における内部伝熱状態に合わせて、適切な加熱条件で加熱部3を制御できる。つまり、被調理物の重量変化から精度良く芯温の仕上がり状態を判断できる。
なお、本実施の形態では、加熱処理開始時に検知した第一重量値(A)を操作表示部8に表示する構成を例に説明したが、これに限られない。例えば、第一重量値(A)に対する第二重量値の割合を操作表示部8に表示する構成としてもよい。例えば、被調理物の調理後の相対重量値が、参考値として料理本などに記載されている場合ある。そこで、上記割合を操作表示部8に表示することで、使用者は被調理物の状態の変化を可視的に捉えることができる。
さらに、被調理物の重量変化率の勾配が、選定した被調理物の状態因子の重量変化率の勾配(MX)とほぼ一致した時点から、第二重量値に相対する第二記憶状態重量値と相関する記憶状態芯温値を割り出し、推定した芯温値を操作表示部8に表示する構成としてもよい。これにより、使用者は、被調理物の仕上がり状態を、より可視的に捉えることができる。そのため、使用者の好みに応じた芯温値の仕上がり状態に変更する場合において、ある程度、目安を持って変更することができる。その結果、加熱調理器の使用性や利便性が向上する。
また、上記では、好みの仕上がり状態の設定を、芯温値で選択する例で説明したが、これに限られない。例えば、被調理物が牛肉ステーキの場合、芯温値に相当する「レア」、「ミディアム」、「ウェルダン」などの表現で操作表示部8に表示し、使用者が選択する構成としてもよい。これにより、使用者は、好みの仕上がり状態を、感覚的に選択し易くなる。
また、使用者が、以前設定した好みの芯温値に記憶状態芯温値の設定を変更できる構成としてもよい。これにより、次回から、自動で自分好みの仕上がり状態を、使用者に知らせることができる。その結果、加熱調理器の利便性が、さらに向上する。
さらに、本実施の形態では、各状態因子に対して、基準の加熱温度条件ではなく、それぞれの状態因子で最適な加熱変化の検量線(第一記憶状態重量値、第二記憶状態重量値、記憶状態芯温値)の情報を合わせて記憶している。そのため、被調理物の状態として状態因子を選定後、状態因子における最適な加熱変化の検量線に変更できる。これにより、変更した検量線に合わせるように被調理物の加熱制御を行うことができる。その結果、被調理物の状態に関わらず、最適な加熱条件で、安定して仕上がり状態の判定を行うことができる。
また、本実施の形態では、状態因子3を、被調理物中の筋肉部を形成するタンパク質と水分以外の比率とする例で説明したが、これに限られない。例えば、骨付き肉の場合、国ごとに料理スタイルが異なるため、その種類が多い。そこで、被調理物の種類の選択に「骨付き肉」を設けて、「骨付き」と「骨なし」とを区別して、状態因子3を設定してもよい。これにより、「骨付き肉」の場合でも、より精度良く芯温を推定して加熱調理できる。
また、本実施の形態では、加熱部3を誘導加熱コイルとし、調理容器1を誘導加熱する構成を例に説明したが、これに限られない。例えば、電熱ヒータなどによる加熱でもよく、ガスなどの直火による加熱でもよい。これにより、汎用性が向上する。
(実施の形態2)
以下に、本発明の実施の形態2の加熱調理器について、説明する。
以下に、本発明の実施の形態2の加熱調理器について、説明する。
本実施の形態の加熱調理器は、実施の形態1の加熱調理器とほぼ同じ構成を備えるが、被調理物の芯温値の算出方法が異なる。それ以外の構成や方法は同じであるので、異なる部分について説明する。
本実施の形態の加熱調理器の情報記憶部17は、被調理物の種類に対応し、かつ、以下で説明する状態因子1、状態因子2、状態因子3を設定して記憶する。
状態因子1は、被調理物の加熱側の投影面積に対する実加熱接触面積の割合に関する因子である。状態因子2は、被調理物の厚みに関する因子である。状態因子3は、被調理物の筋肉構造を形成するタンパク質と水分以外の比率に関する因子である。
さらに、情報記憶部17は、上記状態因子1、2、3を、例えば高/中/低の3水準に分けて、状態因子1、2、3の各水準における第一記憶状態重量値、第二記憶状態重量値、記憶状態芯温値を細分化した情報で記憶する。
このとき、状態因子1、2、3における第一記憶状態重量値は、被調理物の種類に応じて、全て同じ基準重量値で設定している。
具体的には、例えば被調理物の種類がステーキ肉の場合、図12に示すように、基準重量値を200gに設定する。そして、基準重量値に対する状態因子1、2、3における各水準における第一記憶状態重量値、第二記憶状態重量値とから得られる検量線の情報を、情報記憶部17に記憶する。
なお、図12に示す検量線は、第一記憶状態重量値と第二記憶状態重量値とから得られる検量線のみを図示し、記憶状態芯温値の検量線は図示していない。
以上のように、本実施の形態の加熱調理器は構成される。
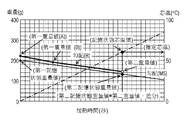
以下に、上記加熱調理器の動作および作用について、図13を用いて、説明する。
図13は、同加熱調理器における情報記憶部17に記憶した勾配(MX)の情報と重量検知から演算した勾配(A)とを比較した線図である。
まず、実施の形態1と同様に、調理の準備が完了し、調理開始する際、使用者は、操作表示部8の調理メニューから、調理を行う被調理物の種類と、調理方法の種類を選択する。
そして、制御部4は、被調理物のない状態で重量検知部7が検知した重量を、基準重量として、操作表示部8に「0g」を表示する。
つぎに、制御部4は、加熱部3を制御して、調理容器1の加熱を開始し、例えば基準温度条件の温度まで昇温する。
つぎに、使用者は、基準温度条件の温度に達すると、調理容器1に被調理物を投入する。そして、実施の形態1と同様に、制御部4は、被調理物の第一重量値、第二重量値を計測、情報記憶部17に記憶する。
つぎに、制御部4は、計測した各値に基づいて、平均化した線形の相関線から単位時間当たりの重量変化率の勾配(A)を演算する。
以上の動作ステップは、実施の形態1と同様である。
つぎに、制御部4は、演算で得られた勾配(A)と、開始時に選択した被調理物の種類と調理方法の種類の組合せに対応して、予め情報記憶部17に記憶している各状態因子の第一記憶状態重量値と第二記憶状態重量値から演算された重量変化率の勾配(M1、M2、M3・・・M9)を情報記憶部17から読み出す。
つぎに、制御部4は、(|勾配(A)-勾配(MX)|)の比較演算を実行し、最小となる勾配(MX)を求める。そして、制御部4は、各状態因子における3水準のうち、最小となる勾配(MX)を、最も近い状態因子の水準として選択する。
ここで、図13に示す太線は、加熱による被調理物(ステーキ肉:300g)の重量変化を検知した値から平均化した相関線を示している。そして、図13では、演算により導き出した勾配(A)との差分が最も小さい、状態因子2の中水準である勾配(M5)が選択されたことを示している。
つぎに、制御部4は、選択した被調理物の状態因子の重量変化率の勾配(MX;M5に相当)と、被調理物の重量変化率の勾配(A)の値が一致するように、加熱部3の加熱条件を制御する。
つぎに、制御部4は、図14に示すように、加熱条件を変更した時点の重量を第一重量値(B)として、再度、情報記憶部17に記憶する。なお、加熱開始時に記憶した第一重量値は、後述する演算に用いるため、第一重量値(A)として区別して、制御部4にそのまま残す。
つぎに、制御部4は、第一重量値(B)を検知した時点から、実施の形態1の図7で説明したと同様に、約1秒毎に被調理物の重量を検知し、第二重量値として記憶する。そして、制御部4は、第一重量値(B)と、第一重量値(B)を記憶した時点から約10秒間に、1秒毎に記憶した各第二重量値から、図14に示す平均化した線形の相関線を演算する。これにより、相関線から得られる単位時間当たりの重量変化率の勾配(B)が演算により導き出される。
つぎに、制御部4は、導き出した勾配(B)と、加熱条件変更前に選定した状態因子の勾配(MX;M5に相当)とを、実施の形態1で示す(式1)に基づいて、比較演算する。なお、図14には、加熱条件変更前に、選択した勾配(M5)を、併せて図示している。
このとき、勾配(B)と勾配(MX)との差分が、予め設定した所定の設定値の範囲内に収まっていない場合、再度、制御部4は、加熱温度を制御して、調理容器1の温度を調整する。
つぎに、制御部4は、新たに勾配を算出し、算出した勾配を、(式1)に基づいて、比較演算する。
そして、算出された勾配と勾配(MX)との差分が所定の設定値の範囲内に収まるまで、制御部4は、加熱部3の加熱制御および上記演算を繰り返し実行する。
これにより、勾配(MX)との差分が所定の設定値の範囲内に収まると、第二重量値と第二記憶状態重量値とは、一定割合の相対関係で推移する。このとき、上記状態において、被調理物の重量変化と、選定した状態因子の検量線との間で、水分の蒸発率が一致する点では芯温値もほぼ一致すると推定できる。
つぎに、制御部4は、以下に示す(式2)を用いて、第二重量値と、水分の蒸発率が一致する第二記憶状態重量値を、第一記憶状態重量値と第二記憶状態重量値から算出される重量変化率の相関線から演算する。
そして、制御部4は、図15に示すように、第二重量値に近似する第二記憶状態重量値(B)と一致する記憶状態芯温値から、現時点の被調理物の芯温値の推定を行う。
第二記憶状態重量値(B)=(第一記憶状態重量値÷第一重量値(A))×第二重量値・・・(式2)
つぎに、制御部4は、上記芯温値を推定する比較演算を、所定の芯温値になるまで繰り返す。
つぎに、制御部4は、上記芯温値を推定する比較演算を、所定の芯温値になるまで繰り返す。
つぎに、推定した被調理物の芯温値が所定の芯温値となった時点で、制御部4は、加熱中の被調理物の仕上がり状態が最適な状態となったと判断する。
そして、制御部4は、加熱部3による調理容器1の加熱を停止する。同時に、制御部4は、調理が完了したことを、操作表示部を介して、使用者に知らせる。
本実施の形態によれば、事前に調べる情報量を少なくできるため、膨大な情報を記憶する必要がない。その結果、情報記憶部17のメモリ容量を少なくできる。
以上で説明したように、本発明の加熱調理器は、被調理物を加熱する加熱部と、被調理物の重量を計測する重量検知部と、加熱する被調理物の種類を選択する選択部と、選択部で選択された被調理物の種類に対応する情報を記憶する情報記憶部と、重量検知部で計測された重量検知結果および選択部で選択された被調理物の種類に基づき加熱部を制御する制御部を備える。制御部は、重量検知部で計測した被調理物の第一重量値と、第一重量値を計測後における加熱部による加熱時の重量検知部で計測した被調理物の第二重量値と、選択部で選択した被調理物の種類に対応する情報記憶部に記憶されている情報と、を比較して、加熱中の被調理物の状態を推定して加熱調理する。
この構成によれば、被調理物の状態の内部伝熱状態に合わせた加熱条件で、被調理物を加熱制御する。これにより、制御部は、被調理物の重量変化から精度良く芯温を推定して、被調理物の仕上がり状態を判断できる。その結果、被調理物を最適な状態で仕上げることができる。
また、本発明の加熱調理器は、被調理物の第一重量値を、被調理物の加熱開始時、加熱開始から第一の所定時間到達時、および加熱開始から被調理物が第一の所定温度到達時のうちの、少なくとも一方のタイミングにおいて、重量検知部で被調理物を計測した値とする。さらに、被調理物の第二重量値を、第一重量値を計測した時点から第二の所定時間到達時、および第一の所定温度と異なる加熱開始から被調理物が第二の所定温度到達時のうちの、少なくとも一方のタイミングにおいて、重量検知部で被調理物を計測した値としてもよい。
これにより、加熱時間と加熱による重量変化とを、より正確に確認できる。そのため、情報記憶部に記憶している被調理物の情報と、加熱による重量変化とを、より精度良く対比させることができる。
また、本発明の加熱調理器は、被調理物の状態が、被調理物の加熱側投影面積に対する実加熱接触面積の割合、被調理物の厚み、また、被調理物中の筋肉を形成するタンパク質と水分以外の比率の、少なくともいずれか1つであればよい。
これにより、加熱時における被調理物の内部への伝熱状態の違いを、より的確に判断できる。
また、本発明の加熱調理器は、情報記憶部に記憶されている情報が、被調理物の種類に対応して被調理物の第一記憶重量値と、所定の加熱経過時点での第二記憶重量値と、第一記憶重量値と第二記憶重量値から推定した被調理物の記憶芯温値と、を有していればよい。
これにより、加熱時間に対する被調理物の重量変化量から、被調理物の芯温の状態を推定することができる。
また、本発明の加熱調理器は、情報記憶部に記憶されている情報が、被調理物の状態に対応して被調理物の第一記憶状態重量値と、所定の加熱経過時点での第二記憶状態重量値と、第一記憶状態重量値と第二記憶状態重量値から演算された重量変化率と、第一記憶状態重量値と第二記憶状態重量値から推定した被調理物の記憶状態芯温値と、を有してもよい。
これにより、加熱時間に対する被調理物の重量変化量を、被調理物の状態に対して比較できる。そのため、被調理物の状態に適した加熱条件の変更や、被調理物の芯温の状態を、より精度良く推定することができる。
また、本発明の加熱調理器の制御部は、推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱部を制御すればよい。
これにより、被調理物の仕上がり状態や、被調理物の芯温の状態を、より精度良く推定することができる。
また、本発明の加熱調理器の制御部は、推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるよう加熱部を制御する、そして、制御部は、所定の記憶状態芯温値に対応する第二記憶状態重量値と相比例した第二重量値に到達時に、加熱部を停止する、あるいは所定の記憶状態芯温値を報知するうちの、少なくとも一方を実施すればよい。
これにより、被調理物の加熱し過ぎによる焼き焦げや、身が硬くなるといった仕上がり状態の低下を抑制できる。その結果、被調理物の調理を、最適な仕上がり状態で完了させることができる。
また、本発明の加熱調理器は、加熱調理器に操作表示部を備える。制御部は、推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるように加熱部を制御し、操作表示部に第二重量値、加熱開始前後で測定した第一重量値に対する第二重量値の割合、あるいは、第二記憶状態重量値から推定した被調理物の記憶状態芯温値の、少なくとも一方の値を表示すればよい。
これにより、被調理物の状態変化を、使用者に可視的に認識させることができる。そのため、加熱調理の途中で、使用者自ら加熱条件を変更しても、被調理物の変化の状況を、逐一、判断できる。その結果、使用者は、被調理物を安心して調理することができる。
また、本発明の加熱調理器制御部は、推定された加熱中の被調理物の状態に対応して、情報記憶部に記憶された重量変化率となるように加熱部を制御し、所定の記憶状態芯温値に対応する第二記憶状態重量値に到達時に、所定の記憶状態芯温値を変更可能としてもよい。
これにより、一度、自分好みの仕上がり状態を記憶させれば、次回の調理時において、記憶させた好みの仕上がり状態まで加熱することができる。その結果、加熱調理器の使用性が向上する。
本発明の加熱調理器は、加熱による被調理物の重量変化から被調理物の芯温を精度良く推定して、被調理物を最適な状態に仕上げることができる。そのため、適切な仕上がり状態での加熱調理が要望される種々の加熱調理器の用途に有用である。
1 調理容器
2 トッププレート
3 加熱部
4 制御部
5 筐体
5a,6a フランジ
5b,6b 底面
6 支持部
6bb,12a 開口部
7 重量検知部
7a 信号線
8 操作表示部
9 インバータ
10 駆動制御部
11 鋼板
11b 凹部
12 載置台
12b 上面
12aa 端部
13 重量センサ
13a 貫通孔
14 固定接続部
15 荷重伝達部
15a 凸状部
16 荷重受け部
16a 凹状部
17 情報記憶部
2 トッププレート
3 加熱部
4 制御部
5 筐体
5a,6a フランジ
5b,6b 底面
6 支持部
6bb,12a 開口部
7 重量検知部
7a 信号線
8 操作表示部
9 インバータ
10 駆動制御部
11 鋼板
11b 凹部
12 載置台
12b 上面
12aa 端部
13 重量センサ
13a 貫通孔
14 固定接続部
15 荷重伝達部
15a 凸状部
16 荷重受け部
16a 凹状部
17 情報記憶部
Claims (9)
- 被調理物を加熱する加熱部と、
前記被調理物の重量を計測する重量検知部と、
加熱する前記被調理物の種類を選択する選択部と、
前記選択部で選択された前記被調理物の種類に対応する情報を記憶する情報記憶部と、
前記重量検知部で計測された重量検知結果および前記選択部で選択された被調理物の種類に基づき前記加熱部を制御する制御部と、を備え、
前記制御部は、
前記重量検知部で計測した前記被調理物の第一重量値と、
前記第一重量値を計測後、前記加熱部により加熱された前記被調理物の重量を前記重量検知部で計測した第二重量値と、
前記選択部で選択した前記被調理物の種類に対応する前記情報記憶部に記憶されている情報と、を比較し、
加熱中の前記被調理物の状態を推定して、加熱制御する加熱調理器。 - 前記被調理物の前記第一重量値は、
前記被調理物の加熱開始時、加熱開始から第一の所定時間到達時、および加熱開始から前記被調理物が第一の所定温度到達時のうちの、少なくとも一方のタイミングにおいて、前記重量検知部で前記被調理物を計測した値とし、
前記被調理物の前記第二重量値は、
前記第一重量値を計測した時点から第二の所定時間到達時、および第一の所定温度と異なる加熱開始から被調理物が第二の所定温度到達時のうちの、少なくとも一方のタイミングにおいて、前記重量検知部で前記被調理物を計測した値とする請求項1記載の加熱調理器。 - 前記被調理物の状態は、
前記被調理物の加熱側投影面積に対する実加熱接触面積の割合、前記被調理物の厚み、また、前記被調理物中の筋肉を形成するタンパク質と水分以外の比率の、少なくともいずれか1つである請求項1に記載の加熱調理器。 - 前記情報は、
前記被調理物の種類に対応して前記被調理物の第一記憶重量値と、
所定の加熱経過時点での第二記憶重量値と、
前記第一記憶重量値と前記第二記憶重量値から推定した前記被調理物の記憶芯温値と、を有する請求項1に記載の加熱調理器。 - 前記情報は、
前記被調理物の状態に対応して前記被調理物の第一記憶状態重量値と、
所定の加熱経過時点での第二記憶状態重量値と、
前記第一記憶状態重量値と前記第二記憶状態重量値から演算された重量変化率と、
前記第一記憶状態重量値と前記第二記憶状態重量値から推定した被調理物の記憶状態芯温値と、を有する請求項1に記載の加熱調理器。 - 前記制御部は、
推定された加熱中の前記被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるよう前記加熱部を制御する請求項5に記載の加熱調理器。 - 前記制御部は、
推定された加熱中の前記被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるように前記加熱部を制御し、
所定の前記記憶状態芯温値に対応する前記第二記憶状態重量値と相比例した前記第二重量値に到達時に、前記加熱部を停止する、あるいは所定の前記記憶状態芯温値を報知するうちの、少なくとも一方を実施する請求項5に記載の加熱調理器。 - 前記加熱調理器は操作表示部を、備え、
前記制御部は、
推定された加熱中の前記被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるように前記加熱部を制御し、
前記第二重量値、加熱開始前後で測定した前記第一重量値に対する前記第二重量値の割合、あるいは、前記第二記憶状態重量値から推定した被調理物の記憶状態芯温値の、少なくとも一方の値を前記操作表示部に表示する請求項5に記載の加熱調理器。 - 前記制御部は、
推定された加熱中の前記被調理物の状態に対応して、前記情報記憶部に記憶された前記重量変化率となるように前記加熱部を制御し、
所定の前記記憶状態芯温値に対応する前記第二記憶状態重量値に到達時に、前記所定の前記記憶状態芯温値を変更可能とする請求項5に記載の加熱調理器。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201780007565.4A CN108496042B (zh) | 2016-01-29 | 2017-01-16 | 加热烹调器 |
| EP17743992.4A EP3410015A4 (en) | 2016-01-29 | 2017-01-16 | HEATED COOKING APPARATUS |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-015228 | 2016-01-29 | ||
| JP2016015228A JP6484815B2 (ja) | 2016-01-29 | 2016-01-29 | 加熱調理器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017130761A1 true WO2017130761A1 (ja) | 2017-08-03 |
Family
ID=59397672
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/001161 WO2017130761A1 (ja) | 2016-01-29 | 2017-01-16 | 加熱調理器 |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3410015A4 (ja) |
| JP (1) | JP6484815B2 (ja) |
| CN (1) | CN108496042B (ja) |
| WO (1) | WO2017130761A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111102610B (zh) * | 2018-10-26 | 2021-07-20 | 佛山市顺德区美的电热电器制造有限公司 | 运行控制方法、装置、烹饪器具和计算机可读存储介质 |
| CN109798553B (zh) * | 2018-12-30 | 2021-02-02 | 佛山市顺德区美的洗涤电器制造有限公司 | 一种灶具及其防干烧控制方法、装置、设备和存储介质 |
| JP7212572B2 (ja) * | 2019-04-03 | 2023-01-25 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020183839A (ja) * | 2019-05-09 | 2020-11-12 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| JP2020186862A (ja) * | 2019-05-15 | 2020-11-19 | 東京瓦斯株式会社 | 調理管理の方法、システム、プログラム、および機器 |
| WO2021091269A1 (ko) * | 2019-11-05 | 2021-05-14 | 삼성전자주식회사 | 유도 가열 장치 |
| JP6823750B1 (ja) * | 2020-06-26 | 2021-02-03 | 東京瓦斯株式会社 | 調理判定の方法、システム、プログラム、記録媒体、および調理機器 |
| KR102327654B1 (ko) * | 2020-07-10 | 2021-11-17 | 박태순 | 요리 자동조리장치 및 그 조리방법 |
| JP6829788B1 (ja) * | 2020-07-28 | 2021-02-10 | 東京瓦斯株式会社 | 調理評価の方法、システム、プログラム、記録媒体、および調理機器 |
| CN113208445A (zh) * | 2021-03-31 | 2021-08-06 | 中山市翰林电器有限公司 | 智能加热控制方法、装置及加热设备 |
| KR102394234B1 (ko) * | 2021-10-07 | 2022-05-04 | (주)원팩토리 | 인덕션 레인지 |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05113219A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH05113220A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH06241463A (ja) * | 1993-02-22 | 1994-08-30 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH08112066A (ja) * | 1994-10-17 | 1996-05-07 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JPH11132468A (ja) * | 1997-10-24 | 1999-05-21 | Toshiba Corp | 加熱調理器 |
| JP2004245540A (ja) * | 2003-02-17 | 2004-09-02 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JP2007218545A (ja) * | 2006-02-20 | 2007-08-30 | Hitachi Appliances Inc | 加熱調理器 |
| JP2007327700A (ja) * | 2006-06-08 | 2007-12-20 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6349404U (ja) * | 1986-09-16 | 1988-04-04 | ||
| KR950009117A (ko) * | 1993-09-20 | 1995-04-21 | 야마다 로꾸이찌 | 중량검출장치 |
| US5893051A (en) * | 1994-09-27 | 1999-04-06 | Matsushita Electric Industrial Co., Ltd. | Method of estimating temperature inside material to be cooked and cooking apparatus for effecting same |
| TWI428545B (zh) * | 2010-10-01 | 2014-03-01 | Yu Chieh Lin | 防止燒乾之爐具及其方法 |
| JP2017517322A (ja) * | 2014-06-06 | 2017-06-29 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 調理装置、及び、食品コア温度の予測に基づく食品調理方法 |
-
2016
- 2016-01-29 JP JP2016015228A patent/JP6484815B2/ja active Active
-
2017
- 2017-01-16 EP EP17743992.4A patent/EP3410015A4/en not_active Withdrawn
- 2017-01-16 WO PCT/JP2017/001161 patent/WO2017130761A1/ja active Application Filing
- 2017-01-16 CN CN201780007565.4A patent/CN108496042B/zh active Active
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05113219A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH05113220A (ja) * | 1991-10-21 | 1993-05-07 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH06241463A (ja) * | 1993-02-22 | 1994-08-30 | Matsushita Electric Ind Co Ltd | 調理器具 |
| JPH08112066A (ja) * | 1994-10-17 | 1996-05-07 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JPH11132468A (ja) * | 1997-10-24 | 1999-05-21 | Toshiba Corp | 加熱調理器 |
| JP2004245540A (ja) * | 2003-02-17 | 2004-09-02 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
| JP2007218545A (ja) * | 2006-02-20 | 2007-08-30 | Hitachi Appliances Inc | 加熱調理器 |
| JP2007327700A (ja) * | 2006-06-08 | 2007-12-20 | Matsushita Electric Ind Co Ltd | 加熱調理装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3410015A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108496042A (zh) | 2018-09-04 |
| EP3410015A1 (en) | 2018-12-05 |
| EP3410015A4 (en) | 2019-01-16 |
| CN108496042B (zh) | 2019-12-10 |
| JP2017133780A (ja) | 2017-08-03 |
| JP6484815B2 (ja) | 2019-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017130761A1 (ja) | 加熱調理器 | |
| CN104080381B (zh) | 烹饪食物的方法,和实施所述方法的装置 | |
| US10412789B2 (en) | Method for regulating a cooking process | |
| CN104066366B (zh) | 提供食物烹饪信息的方法,和相关的装置 | |
| US20080102175A1 (en) | Cooking apparatus and method of displaying caloric information | |
| CN102763051A (zh) | 用于控制烹饪过程的方法 | |
| EP3131411A1 (en) | Method and apparatus for controlling a cooking process of food | |
| EP0832544B1 (en) | Food cooking oven | |
| US10253989B2 (en) | Method for operating a cooking device, and such a cooking device for performing the method | |
| CN109863824A (zh) | 用于烹饪系统的自适应热控制 | |
| KR101048897B1 (ko) | 그릴 제어 시스템 및 방법 | |
| CN111329358A (zh) | 烹饪电器的控制方法、烹饪电器及可读存储介质 | |
| CN108827489A (zh) | 一种食材检测模块 | |
| CN217066113U (zh) | 一种烤箱 | |
| JP2019200002A (ja) | 加熱調理装置 | |
| WO2016038039A1 (en) | Controlling a cooking process of food | |
| WO2020180643A1 (en) | Sous-vide oven mode with probe | |
| JP6697920B2 (ja) | コンロ | |
| JP2019216012A (ja) | 加熱調理器 | |
| JP3636185B2 (ja) | 誘導加熱調理器 | |
| KR20110096201A (ko) | 자동온도조절이 가능한 조리기 및 그 제어방법 | |
| JP2019204736A (ja) | 加熱調理装置 | |
| JP5889130B2 (ja) | 誘導加熱調理器およびその制御方法 | |
| CN109974040A (zh) | 一种具有烹饪方式选择功能的燃气灶具 | |
| JPS6266025A (ja) | 食品の加熱方法及び装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17743992 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017743992 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2017743992 Country of ref document: EP Effective date: 20180829 |