WO2017013813A1 - 超音波処置具及び超音波処置アッセンブリ - Google Patents
超音波処置具及び超音波処置アッセンブリ Download PDFInfo
- Publication number
- WO2017013813A1 WO2017013813A1 PCT/JP2015/083589 JP2015083589W WO2017013813A1 WO 2017013813 A1 WO2017013813 A1 WO 2017013813A1 JP 2015083589 W JP2015083589 W JP 2015083589W WO 2017013813 A1 WO2017013813 A1 WO 2017013813A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- inner sheath
- distal end
- sheath
- probe
- ultrasonic treatment
- Prior art date
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/16—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans
- A61B17/1662—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body
- A61B17/1675—Bone cutting, breaking or removal means other than saws, e.g. Osteoclasts; Drills or chisels for bones; Trepans for particular parts of the body for the knee
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/08—Detecting organic movements or changes, e.g. tumours, cysts, swellings
- A61B8/0875—Detecting organic movements or changes, e.g. tumours, cysts, swellings for diagnosis of bone
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4444—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device related to the probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N7/00—Ultrasound therapy
- A61N7/02—Localised ultrasound hyperthermia
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00738—Aspects not otherwise provided for part of the tool being offset with respect to a main axis, e.g. for better view for the surgeon
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B2017/320004—Surgical cutting instruments abrasive
- A61B2017/320008—Scrapers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/32007—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic with suction or vacuum means
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320072—Working tips with special features, e.g. extending parts
- A61B2017/320073—Working tips with special features, e.g. extending parts probe
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/32—Surgical cutting instruments
- A61B17/320068—Surgical cutting instruments using mechanical vibrations, e.g. ultrasonic
- A61B2017/320084—Irrigation sleeves
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2217/00—General characteristics of surgical instruments
- A61B2217/002—Auxiliary appliance
- A61B2217/005—Auxiliary appliance with suction drainage system
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/12—Diagnosis using ultrasonic, sonic or infrasonic waves in body cavities or body tracts, e.g. by using catheters
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B8/00—Diagnosis using ultrasonic, sonic or infrasonic waves
- A61B8/44—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device
- A61B8/4483—Constructional features of the ultrasonic, sonic or infrasonic diagnostic device characterised by features of the ultrasound transducer
Definitions
- the present invention relates to an ultrasonic treatment tool and an ultrasonic treatment assembly for treating a living tissue using ultrasonic vibration.
- an ultrasonic treatment tool that crushes and cuts hard tissue such as bone is disclosed.
- the treatment tool performs suction through a suction path formed in the probe.
- the probe of the ultrasonic treatment instrument disclosed in Japanese Patent Application Laid-Open No. 2003-116870 needs to access the treatment portion of the probe in a narrow cavity such as a joint cavity. And it is made to contact hard tissues, such as a bone, in the state which transmitted ultrasonic vibration. For this reason, appropriate intensity
- the probe strength is appropriately maintained while maintaining the size of the probe, it is necessary to reduce the cross section of the suction path in the probe, and the suction path is likely to be clogged.
- An object of the present invention is to provide an ultrasonic treatment instrument and an ultrasonic treatment assembly capable of ensuring an appropriate suction path while maintaining the size and strength of a probe in an appropriate state.
- An ultrasonic treatment tool used for arthroscopic surgery is provided with a main body portion that transmits ultrasonic vibrations, and a distal end side of the main body portion, and transmits ultrasonic vibrations.
- a probe having a treatment portion capable of cutting hard tissue and / or soft tissue, an inner sheath covering the outer peripheral surface of the main body portion in the probe, an outer peripheral surface of the inner sheath, and an outer peripheral surface of the inner sheath An outer sheath that forms a suction path therebetween, and a sheath unit in which the distal end of the inner sheath extends to a position closer to the treatment portion of the probe than the distal end of the outer sheath.
- FIG. 1 is a schematic view showing a treatment system according to the first to fifth embodiments.
- FIG. 2A is a schematic diagram illustrating an ultrasonic treatment assembly of the treatment system according to the first embodiment.
- FIG. 2B is a schematic longitudinal sectional view showing an ultrasonic treatment instrument of the ultrasonic treatment assembly of the treatment system according to the first embodiment.
- FIG. 3A is a schematic enlarged view of a portion surrounded by symbols ⁇ and ⁇ in FIG. 2B.
- 3B is a schematic cross-sectional view taken along line 3B-3B in FIG. 3A.
- 3C is a schematic cross-sectional view taken along line 3C-3C in FIG. 3A.
- FIG. 1 is a schematic view showing a treatment system according to the first to fifth embodiments.
- FIG. 2A is a schematic diagram illustrating an ultrasonic treatment assembly of the treatment system according to the first embodiment.
- FIG. 2B is a schematic longitudinal sectional view showing an ultrasonic treatment instrument of the ultrasonic treatment assembly
- FIG. 4A shows the cutting region and the part to be cut in the treatment unit in a state where the cutting region of the treatment part of the ultrasonic treatment tool of the treatment system according to the first embodiment is in contact with the part to be cut in the bone. It is the schematic which shows the state observed with the arthroscope from back.
- FIG. 4B shows the cutting region and the part to be cut in the treatment unit in a state where the cutting region of the treatment part of the ultrasonic treatment tool of the treatment system according to the first embodiment is in contact with the part to be cut in the bone. It is the schematic which shows the state which is observing with the arthroscope from the side of the back side.
- FIG. 5 is a schematic enlarged view of a portion surrounded by symbols ⁇ and ⁇ in FIG.
- FIG. 6A is a schematic enlarged view of a portion surrounded by a symbol ⁇ in FIG. 2B in the ultrasonic treatment instrument of the ultrasonic treatment assembly of the treatment system according to the third embodiment.
- FIG. 6B is a longitudinal cross-sectional view schematically enlarging a part surrounded by a symbol ⁇ in FIG. 2B in the ultrasonic treatment instrument of the ultrasonic treatment assembly of the treatment system according to the third embodiment.
- FIG. 7A is a schematic view showing an ultrasonic treatment instrument of an ultrasonic treatment assembly of the treatment system according to the fourth embodiment.
- FIG. 7B is a schematic enlarged view of a portion surrounded by a symbol ⁇ in FIG. 7A.
- FIG. 8A is a schematic view of the ultrasonic treatment tool of the ultrasonic treatment assembly of the treatment system according to the fourth embodiment, viewed from the direction indicated by the arrow 8A in FIG. 7A.
- FIG. 8B is a longitudinal sectional view schematically enlarging a portion surrounded by a symbol ⁇ in FIG. 8A.
- FIG. 9A is an enlarged view of a portion surrounded by reference numeral ⁇ in FIG. 7A, showing a state in which a notch is formed at the distal end portion of the inner sheath of the ultrasonic treatment instrument of the ultrasonic treatment assembly of the treatment system according to the fifth embodiment.
- FIG. 9B shows a state in which a notch is formed in the distal end portion of the inner sheath of the ultrasonic treatment device of the ultrasonic treatment assembly of the treatment system according to the modification of the fifth embodiment, which is surrounded by reference numeral ⁇ in FIG. 7A. It is the schematic which expanded the site
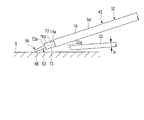
- the treatment system 10 includes an arthroscopic device 12, a treatment device 14, and a perfusion device 16.
- the arthroscopic device 12 includes an arthroscope 22 for observing the patient's joint 100, that is, the joint cavity 136, an arthroscope controller 24 that performs image processing based on a subject image captured by the arthroscope 22, and an arthroscope controller 24. And a monitor 26 for displaying a video generated by the image processing in FIG.
- the arthroscope 22 is inserted into the joint cavity 136 of the joint 100 by a first cannula 18a that forms an outer portal 102 that allows communication between the patient's joint 100 and the outside of the skin. Note that the position of the portal 102 is not uniform and is appropriately determined according to the patient's condition.
- the treatment apparatus 14 includes an ultrasonic treatment assembly 32, a treatment instrument controller 34, and a switch 36.
- the ultrasonic treatment assembly 32 includes an ultrasonic treatment instrument 42 and an ultrasonic transducer unit 44 including an ultrasonic transducer 44a.
- As the ultrasonic transducer 44a of the ultrasonic transducer unit 44 for example, a known type that generates ultrasonic vibration when energy is input, such as a BLT type, is used.
- the ultrasonic transducer 44a of the ultrasonic transducer unit 44 can vibrate at an appropriate resonance frequency, and can change the amplitude within an appropriate range by adjusting the amount of input energy.
- the treatment instrument controller 34 supplies energy to the ultrasonic transducer unit 44 in accordance with the operation of the switch 36 and transmits ultrasonic vibrations to a treatment section 64 of the probe 52 described later of the ultrasonic treatment instrument 42.
- the ultrasonic treatment assembly 32 is inserted into the joint cavity 136 of the joint 100 by the second cannula 18b that forms the inner portal 104 that allows the inside of the patient's joint 100 to communicate with the outside of the skin.
- the position of the portal 104 is not uniform and is appropriately determined according to the patient's condition.
- the switch 36 maintains a state in which the ultrasonic transducer 44a of the ultrasonic transducer unit 44 is driven while being pressed, and the ultrasonic transducer 44a is driven when the press is released. Is released.
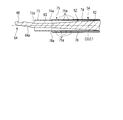
- an ultrasonic treatment instrument (ultrasonic device) 42 used with an arthroscope 22, that is, used for arthroscopic surgery includes a probe 52, a sheath unit 54, and at least The outer peripheral surface is provided with a handle 56 having electrical insulation.
- the handle 56 is provided at the proximal end portion of the sheath unit 54, and has a connector 58 that connects a suction path 76, which will be described later, to a suction pump unit (suction source) 94 installed on the wall of the operating room or the like.
- the ultrasonic transducer unit 44 is detachably connected to the proximal end of the handle 56.
- the ultrasonic treatment instrument 42 is used for treatment in a state where the ultrasonic transducer unit 44 is assembled and the ultrasonic treatment assembly 32 is formed.
- the foot switch 36 includes pressing portions 36a and 36b. If a vibration with a large amplitude is generated in the vibrator 44a, the pressing portion 36a is pressed, and if a vibration with a small amplitude is generated, the pressing portion 36b is pressed.
- the amplitude may be changed between when cutting hard tissue such as bone and when cutting soft tissue such as cartilage. That is, the amplitude may be appropriately changed depending on the state of the treatment target. In addition, the amplitude may be appropriately changed depending on the amount of cutting with respect to the treatment target.
- the probe 52 is made of a material having a good ultrasonic vibration transmission property, such as a titanium alloy material.
- the proximal end of the probe 52 is connected to the ultrasonic transducer 44a that generates ultrasonic vibration when energy is input. Is done.
- the probe 52 includes a straight rod-shaped main body portion 62 that transmits ultrasonic vibrations, and a treatment portion 64 that is provided on the distal end side of the main body portion 62 and can cut bone by transmitting ultrasonic vibrations.
- the treatment portion 64 includes a cutting region (cutting blade) 66 that protrudes in a direction different from the direction along the central axis C0 of the main body portion 62 of the probe 52.
- the treatment portion 64 has a curved portion 64 a that is bent from the distal end of the main body portion 62. For this reason, the position of the cutting region 66 can be shifted from the central axis C0 of the probe 52 in a state where the treatment portion 64 is kept small.
- FIG. 3A shows an example drawn as a hook-shaped cutting region 66, the treatment unit 64 having cutting regions 66 of various shapes such as a blade type and a curette type (not shown).
- a probe 52 can be used.
- the wavelength of ultrasonic vibration input to the probe 52 is determined by the resonance frequency of the vibrator 44 a of the ultrasonic vibrator unit 44. That is, the length of the probe 52 is determined by the vibrator 44a used. Therefore, when the ultrasonic vibration is input from the ultrasonic transducer 44 a of the ultrasonic transducer unit 44 to the proximal end of the probe 52 and the ultrasonic vibration is transmitted to the probe 52, the probe 52 transmits the vibration to the treatment unit 64.
- the abdominal position has a defined length.
- the antinode position of vibration preferably matches the position of the cutting area 66. That is, the position of the cutting region 66 is adjusted to be a position corresponding to the antinode position of vibration.
- the first vibration node position on the proximal side with respect to the vibration antinode is defined between the distal end and the proximal end of the main body 62 of the probe 52.
- the sheath unit 54 has an inner sheath (first sheath) 72 and an outer sheath (second sheath) 74.
- the inner sheath 72 and the outer sheath 74 are formed of a material having rigidity, such as a stainless alloy material.
- the thickness of the inner sheath 72 is preferably thinner than the thickness of the outer sheath 74.
- the inner sheath 72 covers the outer peripheral surface of the main body 62 of the probe 52.
- the central axis C1 of the inner sheath 72 coincides with the central axis C0 of the main body 62 of the probe 52.
- the distal end 72a of the inner sheath 72 is in a state where ultrasonic vibration is transmitted, from the position indicated by reference numeral N1 that is the first vibration node position from the position corresponding to the vibration antinode position of the treatment portion 64 of the probe 52. Is also on the tip side.
- An O-ring 78 is disposed between the inner peripheral surface of the inner sheath 72 on the outer peripheral surface of the position N ⁇ b> 1 serving as a vibration node position in the main body portion 62 of the probe 52. Therefore, it is possible to prevent liquid from entering between the main body portion 62 of the probe 52 and the inner sheath 72 on the proximal end side from the O-ring 78 along the central axes C0 and C1.
- the outer sheath 74 covers the outer peripheral surface of the inner sheath 72.
- the proximal end 72b of the inner sheath 72 and the proximal end 74b of the outer sheath 74 are fixed to the handle 56, respectively.
- a suction path 76 is formed between the outer peripheral surface of the inner sheath 72 and the inner peripheral surface of the outer sheath 74. Since the proximal end 74b of the outer sheath 74 is located on the distal end side along the central axis C1 of the inner sheath 72 relative to the proximal end 72b of the inner sheath 72, the suction path 76 communicates with the communication path 58a of the connector 58. As shown in FIG. 3B, the handle 56 is fixed by shifting the central axis C1 of the inner sheath 72 and the central axis C2 of the outer sheath 74.
- the distal end 72 a of the inner sheath 72 extends to a position closer to the treatment portion 64 of the probe 52 than the distal end 74 a of the outer sheath 74. Therefore, the region between the distal end 72 a of the inner sheath 72 and the distal end 74 a of the outer sheath 74, that is, the inner sheath 72 extends toward the distal end side by the amount of the distal end portion 73 with respect to the distal end 74 a of the outer sheath 74. Has been. Therefore, the suction opening 76a of the suction path 76 is located at a position closer to the proximal end along the central axis C1 than the distal end 72a of the inner sheath 72.
- the perfusion device 16 includes a bag-like liquid source 82 that contains a perfusion solution such as physiological saline, a perfusion pump unit 84, and a liquid supply tube 86 having one end connected to the liquid source 82.
- the drainage tube 88 and the suction bottle 90 to which one end of the drainage tube 88 is connected are included.
- the suction bottle 90 is connected to a suction pump unit 94 attached to the operating room wall 92.
- the perfusion pump unit 84 can send out the perfusate from the liquid source 82 by the liquid feed pump 84a. Further, the perfusion pump unit 84 can switch the suction / suction stop of the perfusion liquid in the joint cavity 136 with respect to the suction bottle 90 by opening and closing the pinch valve 84b as a drain valve.
- the ultrasonic treatment unit 42 is attached to the ultrasonic treatment instrument 42 to form the ultrasonic treatment assembly 32. Then, the connector 58 shown in FIG. 2A and the drainage tube 88 shown in FIG. 1 are connected to prepare the treatment system 10 shown in FIG.
- the surgeon forms the first portal 102 and arranges the first cannula 18 a on the first portal 102 as necessary.
- the tip of the arthroscope 22 is placed in the joint cavity 136 of the joint 100 through the first cannula 18a.
- the perfusion device 16 can be connected to the arthroscope 22, the first cannula 18a is not necessarily required.
- the surgeon forms the second portal 104 and places the second cannula 18 b on the portal 104.
- the 2nd cannula 18b is not necessarily required.
- the treatment portion 64 and the sheath unit 54 of the probe 52 are inserted into the narrow joint capsule 130 together with the arthroscope 22. Then, the surgeon brings the cutting region 66 of the treatment section 64 into contact with a portion (treatment target) S (refer to FIG. 4A and FIG. 4B) of the bone based on the image observed by the arthroscope 22. With the cutting region 66 in the visual field of the arthroscope 22, the switch 36 is operated to supply energy to the ultrasonic transducer unit 44 while operating the suction pump unit 94. The ultrasonic transducer 44 a of the ultrasonic transducer unit 44 is vibrated, and ultrasonic vibration is input to the probe 52.
- the ultrasonic vibration is transmitted to the cutting area 66 of the treatment section 64, so that the cutting area 66 can perform a treatment of cutting the portion S to be cut in the bone.
- this treatment for example, hard tissues such as osteophytes can be removed.
- the operator secures the visual field of the arthroscope 22 by removing bubbles and cutting pieces generated during the treatment using the ultrasonic treatment tool 42 by suction. Part of the bone cutting piece becomes fine particles. For this reason, the cut piece shaved from the suction opening 76 a between the outer peripheral surface of the inner sheath 72 and the inner peripheral surface of the outer sheath 74 is sucked.
- the cutting piece that does not enter the suction opening 76a is floated in the joint cavity and is collected using forceps or the like as necessary.
- the distal end 74a of the outer sheath 74 extends to the same position as the distal end 72a of the inner sheath 72, the distal end 74a of the outer sheath 74 having an outer diameter larger than the outer diameter of the inner sheath 72 becomes the arthroscope. It can be easily imagined that it can interfere with the observation by 22. As shown in FIG. 3A, in this embodiment, the distal end 72a of the inner sheath 72 extends to the distal end side along the central axis C1 with respect to the distal end 74a of the outer sheath 74, and is probed with respect to the distal end 72a of the inner sheath 72.
- the cutting region 66 of the treatment part 64 of 52 is protruded. That is, the distal end 72a of the inner sheath 72 is extended compared to the distal end 74a of the outer sheath 74, that is, the suction opening 76a so as to cover the curved portion 64a of the treatment portion 64 of the probe 52.
- the suction opening 76a is formed at a position on the proximal end side along the central axes C1 and C2 with respect to the distal end 72a of the inner sheath 72.
- the distal end 72 a of the inner sheath 72 extends to the distal end side with respect to the distal end 74 a of the outer sheath 74, so that the treatment section It is easy to confirm the 64 cutting regions 66 and the part S of the bone to be cut. That is, in this embodiment, compared to the case where the distal end 74a of the outer sheath 74 extends to the same position as the distal end 72a of the inner sheath 72, the distal end portion 73 of the inner sheath 72 (the inner sheath 72 includes the inner sheath 72).
- the cutting region 66 of the treatment portion 64 of the probe 52 is eliminated by the amount that the outer sheath 74 having a larger outer diameter than the inner sheath 72 is eliminated. Can be easily observed with the arthroscope 22.
- the curved portion 64 a of the treatment portion 64 of the probe 52 is covered with the distal end portion 73 of the inner sheath 72.
- the proximal end portion of the bending portion 64 a of the treatment portion 64 of the probe 52 is covered with the distal end portion 73 of the inner sheath 72.
- the bending section 64a of the treatment section 64 may depend on the relative position between the sheath unit 54 and the arthroscope 22. Of course, contact with the arthroscope 22 may be protected by the outer peripheral surface of the outer sheath 74.
- the procedure for cutting hard tissue such as bone has been described as an example, but the same treatment assembly 32 can also be used when performing a procedure for removing a part of a relatively soft tissue such as cartilage. . Moreover, it is preferable to proceed with the treatment by appropriately selecting the amplitude of the vibrator 44a, whether treating hard tissue or soft tissue.
- the distal end 72a of the inner sheath 72 is extended as compared with the distal end 74a (suction opening 76a) of the outer sheath 74 so as to cover the curved portion 64a of the treatment portion 64 of the probe 52, and the distal end portion 73 is formed.
- the curved portion 64 a of the probe 52 is covered with the distal end portion 73 of the inner sheath 72. Therefore, the curved portion 64 a of the probe 52 can be protected from contact with the arthroscope 22 by the distal end portion 73 of the inner sheath 72. For this reason, the front-end
- FIG. 3A of the main-body part 62 of the probe 52 can be protected by the inner sheath 72.
- the distal end 72a of the inner sheath 72 is made longer than the distal end 74a (suction opening 76a) of the outer sheath 74.
- the visibility of the cutting region 66 by the arthroscope 22 can be improved.
- the visibility of the part S to be cut out of the bone can be improved by the structure in which the inner sheath 72 having a smaller outer diameter as compared with the outer sheath 74 is extended.
- the bending portion of the treatment portion 64 of the probe 52 is configured by extending the inner sheath 72 having a small diameter toward the distal end side so as to cover the bending portion 64a of the treatment portion 64 of the probe 52 with respect to the suction opening 76a. It is possible to ensure ease of treatment in the cutting region 66 of the treatment section 64 while preventing the arthroscope 22 from coming into contact with 64a.
- a suction path 76 is formed between the outer peripheral surface of the inner sheath 72 and the inner peripheral surface of the outer sheath 74. For this reason, an appropriate suction path 76 can be secured.
- a wide portion and a narrow portion of the suction path 76 can be formed, such as a relatively large cutting piece. Can also prevent clogging.
- the inner sheath 72 is described as being straight.
- the outer diameter of the inner sheath 72 is reduced as the distal end portion 73 moves toward the distal end side.
- the distal end portion 73 of the inner sheath 72 is preferably reduced in diameter from the proximal end side toward the distal end side. For this reason, it is suitable for the front-end
- the cutting region 66 is observed with the arthroscope 22 by forming the distal end portion 73 of the inner sheath 72 in a state of decreasing in diameter toward the distal end side, as compared with the case described in the first embodiment. At this time, it is possible to prevent the cutting portion 66 from being obstructed by the distal end portion 73 of the inner sheath 72. In addition, the presence of the distal end portion 73 of the inner sheath 72 can protect the distal end portion 63 (region on the proximal end side of the bending portion 64a) of the main body portion 62 of the probe 52.
- FIGS. 6A and 6B a third embodiment will be described with reference to FIGS. 6A and 6B.
- This embodiment is a modification of the first and second embodiments, and the same members or members having the same functions as those described in the first and second embodiments are denoted by the same reference numerals and detailed. Description is omitted.
- the outer sheath 74 has a distal end portion 75 (a region having an appropriate length (for example, several millimeters to several tens of millimeters) from the distal end 74a of the outer sheath 74 toward the proximal end side along the central axis C2).
- a plurality of through-holes 75a for communicating between the outer peripheral surface and the inner peripheral surface of 74 are provided. That is, the through hole 75 a allows the outer peripheral surface of the outer sheath 74 and the suction path 76 to communicate with each other.
- the hole diameter of the through hole 75a can be set as appropriate.
- the diameter of the through-hole 75a is not large enough to contact the outer peripheral surface of the inner sheath 72 when the arthroscope 22 contacts the outer peripheral surface of the outer sheath 74.
- the diameter may be the same as or smaller than the assumed cutting piece of the bone.
- the suction opening 76a is clogged.
- the suction path 76 is blocked.
- the through hole 75a is used as a suction opening together with the suction opening 76a by the through hole 75a having an appropriate diameter. For this reason, even if the suction opening 76a is clogged, the particulate cutting piece can be continuously sucked through the suction passage 76 through the through hole 75a. For this reason, the clogging of the suction by the cutting piece is eliminated by the through hole 75a, and the visual field by the arthroscope 22 is always easily secured.
- the cut piece cut in the cutting region 66 of the treatment section 64 may be caught in the suction opening 76a.
- FIGS. 7A to 8B a fourth embodiment will be described with reference to FIGS. 7A to 8B.
- This embodiment is a modification of the first to third embodiments, and the same members or members having the same functions as those described in the first to third embodiments are denoted by the same reference numerals and detailed. Description is omitted.
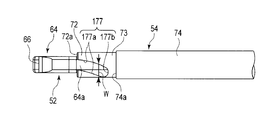
- the inner sheath 72 has a notch 77 extending from the distal end 72a toward the base end to a predetermined position.
- the notch 77 is formed especially at the distal end 73 of the inner sheath 72.
- the notch 77 is formed straight and parallel along the central axis C1.
- the length of the notch 77 in the direction along the central axis C1 of the inner sheath 72 is substantially the same as the length of the distal end 73 on the central axis C1.
- the notch 77 includes a pair of opposing edge portions 77a formed straight in parallel along the central axis C1 and a semicircular bottom portion 77b provided at the base end of the edge portion 77a.
- the pair of edge portions 77a smoothly continues to the bottom portion 77b at the base end.
- the notch 77 has a cutting region 66 of the treatment portion 64 of the probe 52 in the distal end portion 73 of the inner sheath 72 and is formed on the protruding side.
- the width W between a pair of edges 77 a orthogonal to the central axis C ⁇ b> 1 of the inner sheath 72 is based on the diameter D (see FIGS. 4A and 4B) of the minimum portion of the tip of the arthroscope 22. Is also small.
- An appropriate gap is formed between the inner peripheral surface of the distal end portion 73 of the inner sheath 72 and the curved portion 64 a of the treatment portion 64 of the probe 52.
- a notch (groove) 77 having a width W smaller than the diameter D of the arthroscope 22 is formed at the distal end 73 of the inner sheath 72. For this reason, as shown in FIG. 4B, when observing the part S of the bone to be cut with the arthroscope 22 and observing the cutting region 66 of the treatment portion 64, both are observed through the notch 77 of the inner sheath 72. Is done.
- the arthroscope 22 is prevented from coming into contact with the curved portion 64 a of the treatment portion 64 of the probe 52.
- the bending portion 64a is elastically deformed in a direction away from the notch portion 77. For this reason, the distance between the bending portion 64a of the treatment portion 64 of the probe 52 and the notch 77 of the distal end portion 73 of the inner sheath 72 increases. Therefore, the arthroscope 22 is prevented from contacting the probe 52 in a state where the ultrasonic vibration is transmitted.
- the inner sheath 72 is extended toward the distal end side with respect to the distal end 74 a of the outer sheath 74 by the amount corresponding to the distal end portion 73.
- the notch 77 is formed in the distal end portion 73 of the inner sheath 72, so that the treatment portion 64 is inserted into the visual field of the arthroscope 22 through the notch 77 of the inner sheath 72 than when the notch 77 is not present. It is easy to insert the cutting area 66. Further, while observing the cutting region 66 of the treatment section 64 with the arthroscope 22 through the cutout portion 77 of the inner sheath 72, it is possible to observe the portion S of the bone to be cut. Therefore, the visual field of the arthroscope 22 can be secured.
- the width W of the notch 77 in the inner sheath 72 is smaller than the diameter D of the arthroscope 22. For this reason, it can prevent that the arthroscope 22 contacts the treatment part 64 of the probe 52.
- the width W of the notch 77 formed in the inner sheath 72 is made smaller than the diameter D of the arthroscope 22, thereby preventing the arthroscope 22 from coming into contact with the treatment section 64 of the probe 52 and the treatment section 64.
- the cutting region 66 can be easily put under the arthroscope 22 view.
- FIGS. 9A and 9B a fifth embodiment will be described with reference to FIGS. 9A and 9B.
- This embodiment is a modification of the first to fourth embodiments.
- the modification is a modification of the fourth embodiment in particular, and is the same member or the same as the member described in the first to fourth embodiments.
- the members having the functions are denoted by the same reference numerals, and detailed description thereof is omitted.
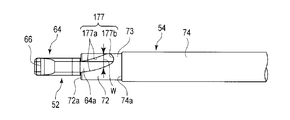
- a notch 177 is formed at the distal end 73 of the inner sheath 72.
- Cutout portion 177 has a pair of edge portions 177a and a bottom portion 177b.
- the pair of edge portions 177a are not parallel to the central axis C1 of the inner sheath 72 but are formed obliquely. That is, the notch 177 is formed to be inclined with respect to the central axis C ⁇ b> 1 of the inner sheath 72.
- the pair of edges 177a are preferably parallel to each other.
- the arthroscope 22 mostly observes the cutting region 66 of the treatment portion 64 from an obliquely rear side when performing a treatment of cutting the bone to be treated. For this reason, if the positional relationship between the arthroscope 22 and the treatment section 64 is determined, the edge 177a of the notch 177 may be straight, but by extending obliquely, the arthroscope 22 Thus, the cutting region 66 of the treatment portion 64 can be easily observed.
- a notch 177 having the shape shown in FIG. 9A is formed. In this case, the treatment area 66 can be easily observed.
- the direction in which the notch 177 extends may be the state shown in FIG. 9B. These can contribute to making the treatment part 64 easier to observe when the positional relationship between the portals 102 and 104 (see FIG. 1) is determined.
- the notch 177 having the shape shown in FIG. 9B is formed, contrary to the state shown in FIG. 4A. If so, the treatment region 66 can be easily observed.
- the pair of edge portions 177 a of the notch portions 177 are parallel to each other has been described.
- the pair of edge portions 177 a have a notch width that decreases toward the distal end 72 a of the inner sheath 72.
- SYMBOLS 10 ... Treatment system, 12 ... Arthroscopic device, 14 ... Treatment device, 16 ... Perfusion device, 22 ... Arthroscope, 32 ... Ultrasonic treatment assembly, 36 ... Switch (foot switch), 42 ... Ultrasonic treatment tool, 44 ... Ultrasonic transducer unit, 44a ... ultrasonic transducer, 52 ... probe, 54 ... sheath unit, 56 ... handle, 62 ... main body, 63 ... tip, 64 ... treatment part, 64a ... curved part, 66 ... cutting region 72 ... inner sheath, 73 ... tip, 74 ... outer sheath, C0, C1, C2 ... central axis.
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Biomedical Technology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Dentistry (AREA)
- Radiology & Medical Imaging (AREA)
- Orthopedic Medicine & Surgery (AREA)
- Pathology (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Oral & Maxillofacial Surgery (AREA)
- Otolaryngology (AREA)
- Rheumatology (AREA)
- Surgical Instruments (AREA)
Abstract
関節鏡視下手術に使用される超音波処置具は、超音波振動を伝達する本体部と、前記本体部の先端側に設けられ、前記超音波振動の伝達により硬組織及び/又は軟組織を切削可能な処置部とを有するプローブと、前記プローブにおける前記本体部の外周面を覆う内シースと、前記内シースの外周面を覆い、前記内シースの外周面との間に吸引路を形成する外シースとを有し、前記内シースの先端が前記外シースの先端よりも前記プローブの前記処置部に近接する位置に延出されているシースユニットとを有する。
Description
この発明は、超音波振動を用いて生体組織を処置する超音波処置具及び超音波処置アッセンブリに関する。
例えば特開2003-116870号公報に開示されているように、骨等の硬組織を破砕して切削する超音波処置具が開示されている。そして、この処置具は、プローブ内に形成した吸引路を通して吸引を行っている。
例えば特開2003-116870号公報に開示されている超音波処置具のプローブは、例えば関節腔内などの狭い腔内に対してプローブの処置部をアクセスさせる必要がある。そして、超音波振動を伝達した状態で骨等の硬組織に接触させられる。このため、プローブに適宜の強度が必要になる。一方、プローブの大きさを維持した状態で、プローブの強度を適宜に維持する場合、プローブ内の吸引路の横断面を小さくする必要があり、吸引路に詰まりが生じ易い。
この発明は、プローブの大きさ及び強度を適宜の状態に維持しつつ、適宜の吸引路を確保可能な超音波処置具及び超音波処置アッセンブリを提供することを目的とする。
この発明の一態様に係る、関節鏡視下手術に使用される超音波処置具は、超音波振動を伝達する本体部と、前記本体部の先端側に設けられ、前記超音波振動の伝達により硬組織及び/又は軟組織を切削可能な処置部とを有するプローブと、前記プローブにおける前記本体部の外周面を覆う内シースと、前記内シースの外周面を覆い、前記内シースの外周面との間に吸引路を形成する外シースとを有し、前記内シースの先端が前記外シースの先端よりも前記プローブの前記処置部に近接する位置に延出されているシースユニットとを有する。
以下、図面を参照しながらこの発明を実施するための形態について説明する。
[第1実施形態]
第1実施形態について図1から図4Bを用いて説明する。
関節100を処置する場合、例えば図1に示す処置システム10が用いられる。この処置システム10は、関節鏡装置12と、処置装置14と、灌流装置16とを有する。
第1実施形態について図1から図4Bを用いて説明する。
関節100を処置する場合、例えば図1に示す処置システム10が用いられる。この処置システム10は、関節鏡装置12と、処置装置14と、灌流装置16とを有する。
関節鏡装置12は、患者の関節100内すなわち関節腔136内を観察する関節鏡22と、関節鏡22によって撮像された被写体像に基づいて画像処理をする関節鏡コントローラ24と、関節鏡コントローラ24での画像処理によって生成された映像を映し出すモニタ26とを有する。関節鏡22は、患者の関節100内と皮膚外とを連通させる外側ポータル102を形成する第1カニューラ18aにより関節100の関節腔136内に挿入される。なお、ポータル102の位置は、画一的ではなく、患者の状態により適宜に決められる。
処置装置14は、超音波処置アッセンブリ32と、処置具コントローラ34と、スイッチ36とを有する。超音波処置アッセンブリ32は、超音波処置具42と、超音波振動子44aを含む超音波振動子ユニット44とを有する。超音波振動子ユニット44の超音波振動子44aは、例えばBLT型など、エネルギが入力されると超音波振動を発生する公知のものが用いられる。超音波振動子ユニット44の超音波振動子44aは適宜の共振周波数で振動可能であるとともに、入力されるエネルギ量の調整により適宜の範囲で振幅を変化させることが可能である。処置具コントローラ34は、スイッチ36の操作に応じて超音波振動子ユニット44にエネルギを供給して、超音波処置具42の後述するプローブ52の処置部64に超音波振動を伝達させる。
超音波処置アッセンブリ32は、患者の関節100内と皮膚外とを連通させる内側ポータル104を形成する第2カニューラ18bにより関節100の関節腔136内に挿入される。なお、ポータル104の位置は、画一的ではなく、患者の状態により適宜に決められる。スイッチ36は、例えば、押圧操作されている状態で超音波振動子ユニット44の超音波振動子44aが駆動された状態を維持し、押圧が解除されると超音波振動子44aが駆動された状態が解除される。
図2Aから図3Aに示すように、関節鏡22とともに使用され、すなわち、関節鏡視下手術に使用される超音波処置具(超音波デバイス)42は、プローブ52と、シースユニット54と、少なくとも外周面が電気絶縁性を有するハンドル56とを備えている。ハンドル56は、シースユニット54の基端部に設けられ、後述する吸引路76を、手術室の壁などに設置された吸引ポンプユニット(吸引源)94に接続するコネクタ58を有する。ハンドル56の基端には、超音波振動子ユニット44が着脱可能に接続される。このように、超音波処置具42は、超音波振動子ユニット44が組み付けられ、超音波処置アッセンブリ32が形成された状態で処置に用いられる。
なお、図1に示すように、ここでは、処置具コントローラ34に接続され、超音波振動子ユニット44にエネルギを入力する指示を行うフットスイッチ36を用いる例について説明するが、ハンドル56に図示しないスイッチ(ハンドスイッチ)が配置されていることが好適であることはもちろんである。フットスイッチ36は、押圧部36a,36bを有する。振動子44aに大きな振幅の振動を発生させるのであれば、押圧部36aを押圧し、小さな振幅の振動を発生させるのであれば押圧部36bを押圧する。例えば、骨等の硬組織を切削する場合と、軟骨等の軟組織を切削する場合とで、振幅を変化させても良い。すなわち、処置対象の状態により、振幅を適宜に変化させても良い。その他、処置対象に対する切削量の大小により、振幅を適宜に変化させても良い。
プローブ52は、例えばチタン合金材など、超音波振動の伝達性が良好な素材が用いられる。プローブ52の基端は、ハンドル56に超音波振動子ユニット44が接続されると、超音波振動子ユニット44のうち、エネルギが入力されると超音波振動を発生する超音波振動子44aに接続される。プローブ52は、超音波振動を伝達する真っ直ぐのロッド状の本体部62と、本体部62の先端側に設けられ、超音波振動の伝達により骨を切削可能な処置部64とを有する。処置部64は、プローブ52の本体部62の中心軸C0に沿う方向とは異なる方向に突出する切削領域(切削刃)66を備えている。また、処置部64は、本体部62の先端から曲げられた湾曲部64aを有する。このため、処置部64を小さく維持した状態で、切削領域66の位置を、プローブ52の中心軸C0からずらすことができる。
なお、図3A中の処置部64は、フック状の切削領域66として描画された例を示しているが、図示しないブレード型やキュレット型など、種々の形状の切削領域66を有する処置部64を含むプローブ52を用いることができる。
超音波振動子ユニット44の振動子44aの共振周波数によりプローブ52に入力される超音波振動の波長が決められる。すなわち、プローブ52の長さは、用いられる振動子44aによって決められることになる。したがって、プローブ52は、超音波振動子ユニット44の超音波振動子44aからプローブ52の基端に超音波振動が入力され、プローブ52に超音波振動が伝達されたとき、処置部64に振動の腹位置が規定される長さを有する。振動の腹位置は、切削領域66の位置に一致することが好ましい。すなわち、切削領域66の位置は、振動の腹位置に相当する位置となるように調整されている。超音波振動が伝達されたとき、振動の腹位置に対して基端側にある1つ目の振動の節位置は、プローブ52の本体部62の先端と基端と間に規定される。
シースユニット54は、内シース(第1シース)72と外シース(第2シース)74とを有する。これら内シース72及び外シース74は、例えばステンレス合金材などの剛性を有する材料で形成されている。内シース72の肉厚は、外シース74の肉厚よりも薄く形成されていることが好ましい。内シース72を薄肉に形成することで、シースユニット54の全体の外径、すなわち外シース74の外径を、より小さく形成することができる。
内シース72はプローブ52のうち本体部62の外周面を覆っている。内シース72の中心軸C1は、プローブ52の本体部62の中心軸C0に一致している。内シース72の先端72aは、超音波振動が伝達された状態で、プローブ52の処置部64の振動の腹位置に相当する位置から1つ目の振動の節位置となる符号N1で示す位置よりも先端側にある。プローブ52の本体部62のうち、振動の節位置となる位置N1の外周面には内シース72の内周面との間にOリング78が配設されている。このため、Oリング78から中心軸C0,C1に沿って基端側の、プローブ52の本体部62と内シース72との間に液体が浸入するのを防止することができる。
外シース74は内シース72の外周面を覆っている。内シース72の基端72b及び外シース74の基端74bはそれぞれハンドル56に固定されている。
そして、内シース72の外周面と外シース74の内周面との間に吸引路76を形成している。内シース72の基端72bよりも外シース74の基端74bが内シース72の中心軸C1に沿って先端側にあるため、吸引路76がコネクタ58の連通路58aと連通している。なお、図3Bに示すように、ハンドル56は、内シース72の中心軸C1と、外シース74の中心軸C2とをずらして固定している。このため、吸引路76において、内シース72及び外シース74の中心軸を一致させた場合よりも内シース72の外周面と外シース74の内周面との間に距離を取ることができる部分を形成することができる。このため、内シース72及び外シース74の中心軸を一致させた場合よりも大きな切削片を吸引できる。なお、内シース72及び外シース74の中心軸C1,C2を一致させた状態に配置することも好適であることはもちろんである。
内シース72の先端72aは、外シース74の先端74aよりもプローブ52の処置部64に近接する位置に延出されている。このため、内シース72の先端72aと外シース74の先端74aとの間の領域、すなわち、内シース72は、外シース74の先端74aに対して、先端部73の分だけ先端側に延出されている。したがって、吸引路76の吸引開口76aは、内シース72の先端72aよりも中心軸C1に沿って基端側の位置にある。
図1に示すように、灌流装置16は、生理食塩水等の灌流液を収容する袋状の液体源82と、灌流ポンプユニット84と、液体源82に一端が接続された送液チューブ86と、排液チューブ88と、排液チューブ88の一端が接続された吸引ボトル90とを含む。吸引ボトル90は、手術室の壁92に取り付けられた吸引ポンプユニット94に接続される。灌流ポンプユニット84は、送液ポンプ84aにより液体源82から灌流液を送り出し可能である。また、灌流ポンプユニット84は、排液弁としてのピンチバルブ84bの開閉により関節腔136内の灌流液を吸引ボトル90に対して吸引/吸引停止を切り替えることができる。
この実施形態に係る処置システム10の作用について説明する。
関節鏡22を用いた手術を行う場合、図2Aに示すように、超音波処置具42に超音波振動子ユニット44を取り付け、超音波処置アッセンブリ32を形成する。そして、図2Aに示すコネクタ58と図1に示す排液チューブ88とを接続し、図1に示す処置システム10を準備する。
関節鏡22を用いた手術を行う場合、図2Aに示すように、超音波処置具42に超音波振動子ユニット44を取り付け、超音波処置アッセンブリ32を形成する。そして、図2Aに示すコネクタ58と図1に示す排液チューブ88とを接続し、図1に示す処置システム10を準備する。
図1に示すように、術者は、第1ポータル102を形成し、必要に応じて第1ポータル102に第1カニューラ18aを配置する。第1カニューラ18aを通して関節100の関節腔136内に関節鏡22の先端を配置する。ここで、関節鏡22に灌流装置16を接続可能であれば、第1カニューラ18aは必ずしも必要ではない。術者は、第2ポータル104を形成し、ポータル104に第2カニューラ18bを配置する。なお、ここでは、第2カニューラ18bを用いる例について説明するが、第2カニューラ18bは必ず必要というものではない。
骨の切削を行う超音波処置アッセンブリ32はプローブ52の処置部64及びシースユニット54が関節鏡22とともに狭い関節包130の中に挿入される。そして、術者は、関節鏡22で観察される映像をたよりに骨のうちの削りたい部位(処置対象)S(図4A及び図4B参照)に処置部64の切削領域66を接触させる。切削領域66を関節鏡22の視野内に入れた状態で、スイッチ36を操作して、吸引ポンプユニット94を動作させながら超音波振動子ユニット44にエネルギを供給する。超音波振動子ユニット44の超音波振動子44aを振動させ、プローブ52に超音波振動を入力する。超音波振動が処置部64の切削領域66に伝達されることで、切削領域66で骨のうちの削りたい部位Sを削る処置を行うことができる。この処置により、例えば骨棘などの硬組織を除去することができる。術者は、超音波処置具42を用いた治療中に発生する気泡や切削片を、吸引により除去することで関節鏡22の視野を確保する。骨の切削片の一部は細かい粒子状になる。このため、内シース72の外周面と外シース74の内周面との間の吸引開口76aから削った切削片を吸引する。
なお、吸引開口76aに入らない切削片は、関節腔内に浮遊させておき、必要に応じて鉗子等を用いて回収する。
なお、吸引開口76aに入らない切削片は、関節腔内に浮遊させておき、必要に応じて鉗子等を用いて回収する。
図1に示すように、プローブ52の処置部64を関節鏡22の先端22aに対向させる場合、関節鏡22で、容易に処置部64の切削領域66、及び、骨のうちの削りたい部位Sを観察することができる。一方、図4A及び図4Bに示すように、プローブ52の処置部64を関節鏡22で後方側から観察しながら処置を行う場合がある。このとき、仮に外シース74の先端74aが内シース72の先端72aと同じ位置まで延出されている場合、内シース72の外径よりも大きな外径を有する外シース74の先端74aが関節鏡22による観察の邪魔になり得ることは容易に想像できるはずである。図3Aに示すように、この実施形態では、内シース72の先端72aを、外シース74の先端74aよりも中心軸C1に沿って先端側に延出し、内シース72の先端72aに対してプローブ52の処置部64の切削領域66を突出させている。すなわち、プローブ52の処置部64の湾曲部64aを覆うように内シース72の先端72aを外シース74の先端74aすなわち吸引開口76aに比べて延ばした構造にしている。更に言い換えると、吸引開口76aを、内シース72の先端72aに対して、中心軸C1,C2に沿って基端側の位置に形成している。内シース72は外シース74に比べて外径が小さいので、外シース74の先端74aに対して内シース72の先端72aを先端側に延出することにより、関節鏡22により、後方から処置部64の切削領域66、及び、骨のうちの削りたい部位Sを確認し易い。すなわち、この実施形態では、外シース74の先端74aが内シース72の先端72aと同じ位置まで延出されている場合に比較して、内シース72の先端部73(内シース72のうち、内シース72の先端72aと外シース74の先端74aとの間の領域)において、内シース72よりも外径が大きい外シース74の存在をなくした分だけ、プローブ52の処置部64の切削領域66を関節鏡22で観察し易くなっている。
また、プローブ52の処置部64の湾曲部64aを内シース72の先端部73で覆っている。特に、プローブ52の処置部64の湾曲部64aの基端部を、内シース72の先端部73で覆っている。このため、関節鏡22の先端を処置部64の後方から切削領域66を視野内に入れるために近づけたとき、処置部64の湾曲部64aが関節鏡22に接触するのを内シース72の先端部73で保護される。なお、関節鏡22の先端を処置部64の後方から切削領域66を視野内に入れるために近づけたとき、シースユニット54と関節鏡22との相対位置によっては、処置部64の湾曲部64aが関節鏡22に接触するのを外シース74の外周面で保護する場合があることはもちろんである。
なお、ここでは、骨等の硬組織を切削する処置を例にして説明したが、軟骨等の比較的軟らかい組織の一部を除去する処置を行う場合も、同じ処置アッセンブリ32を用いることができる。また、硬組織を処置する場合であっても、軟組織を処置する場合であっても、振動子44aの振幅を適宜に選択して処置を進めることが好適である。
以上説明したように、この実施形態に係る超音波処置アッセンブリ32及び超音波処置具42によれば、以下のことが言える。
プローブ52の処置部64の湾曲部64aを覆うように内シース72の先端72aを外シース74の先端74a(吸引開口76a)に比べて延ばして先端部73を形成した構造にしている。そして、プローブ52の湾曲部64aを内シース72の先端部73で覆っている。したがって、プローブ52の湾曲部64aを内シース72の先端部73により、関節鏡22との接触から保護できる。このため、プローブ52の本体部62の図3A中に示す先端部63(湾曲部64aの基端側の領域)を内シース72により保護することができる。
また、内シース72の先端72aを外シース74の先端74a(吸引開口76a)に比べて延ばした構造にしている。このように、外シース74に比べて外径が小さい内シース72を延ばした構造であるため、関節鏡22による切削領域66の視認性を向上することができる。また、外シース74に比べて外径が小さい内シース72を延ばした構造により、骨のうちの削りたい部位Sの視認性を向上することができる。
したがって、吸引開口76aに対して、プローブ52の処置部64の湾曲部64aを覆うように径の細い内シース72を先端側に延ばした構造にすることで、プローブ52の処置部64の湾曲部64aに、関節鏡22が接触するのを防止しつつ、処置部64の切削領域66における処置のし易さを確保することができる。
ここでは、プローブ52自体には吸引路を形成する必要がない。したがって、プローブ52の大きさ及び強度を適宜の状態に維持できる。このとき、内シース72の外周面と外シース74の内周面との間に吸引路76を形成している。このため、適宜の吸引路76を確保できる。この実施形態では、内シース72の中心軸C1と外シース74の中心軸C2とを僅かにずらすことにより、吸引路76のうち、広い部分と狭い部分とを形成でき、比較的大きな切削片などによっても、詰まりが生じるのを抑制することができる。
[第2実施形態]
次に、第2実施形態について、図5を用いて説明する。この実施形態は第1実施形態の変形例であって、第1実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
次に、第2実施形態について、図5を用いて説明する。この実施形態は第1実施形態の変形例であって、第1実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
第1実施形態では、図2Aから図3Aに示すように、内シース72が真っ直ぐの状態を例にして説明した。この実施形態では、図5に示すように、内シース72の先端部73が先端側に向かうにつれて外径を小さく形成されている。この場合、内シース72の先端部73の内径だけでなく、外径を先端側に向かうにつれて小さくすることが好適である。内シース72の先端部73は、その基端側から先端側に向かうにつれて縮径していることが好適である。このため、内シース72の先端部73は、例えば、先端側に向かって縮径するテーパ状に形成されていることが好適である。
図5に示す場合、内シース72の先端部73を先端側に向かうにつれて縮径する状態に形成することにより、第1実施形態で説明した場合よりも、関節鏡22で切削領域66を観察する際に、内シース72の先端部73により切削領域66の観察が妨げられるのを防止することができる。また、内シース72の先端部73の存在により、プローブ52の本体部62の先端部63(湾曲部64aの基端側の領域)を保護することができる。
[第3実施形態]
次に、第3実施形態について、図6A及び図6Bを用いて説明する。この実施形態は第1及び第2実施形態の変形例であって、第1及び第2実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
次に、第3実施形態について、図6A及び図6Bを用いて説明する。この実施形態は第1及び第2実施形態の変形例であって、第1及び第2実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
外シース74の先端部(外シース74の先端74aよりも中心軸C2に沿って基端側に向かって適宜の長さ(例えば数ミリメートルから数十ミリメートル)を有する領域)75には、外シース74の外周面と内周面との間を連通させる複数の貫通孔75aを有する。すなわち、貫通孔75aは、外シース74の外周面と吸引路76との間を連通させている。貫通孔75aの孔径は適宜に設定可能である。例えば内シース72の外周面と外シース74の先端74aの内周面とにより規定される吸引開口76aの径方向幅よりも大きくても小さくても良い。貫通孔75aの孔径が、関節鏡22が外シース74の外周面に接触したときに、内シース72の外周面に当接しない大きさであることはもちろんである。貫通孔75aの孔径の一例として、骨のうちの想定される切削片と同程度かそれより小さい径にしても良い。
この実施形態に係る処置システム10の作用について説明する。
例えば関節腔136内の滑膜(図示せず)など、膜状の生体組織が吸引開口76aを覆ってしまった場合、吸引開口76aに詰まりが生じることになる。この場合、第1及び第2実施形態で説明した例では、吸引路76が遮断される。この実施形態では、適宜の径を有する貫通孔75aにより、吸引開口76aとともに貫通孔75aが吸引開口として用いられる。このため、吸引開口76aに詰まりが生じたとしても、貫通孔75aを通して吸引路76を通して粒子状の切削片が吸引され続けられ得る。このため、貫通孔75aにより、切削片による吸引の詰まりをなくし、関節鏡22による視野を常に確保し易くなる。
例えば関節腔136内の滑膜(図示せず)など、膜状の生体組織が吸引開口76aを覆ってしまった場合、吸引開口76aに詰まりが生じることになる。この場合、第1及び第2実施形態で説明した例では、吸引路76が遮断される。この実施形態では、適宜の径を有する貫通孔75aにより、吸引開口76aとともに貫通孔75aが吸引開口として用いられる。このため、吸引開口76aに詰まりが生じたとしても、貫通孔75aを通して吸引路76を通して粒子状の切削片が吸引され続けられ得る。このため、貫通孔75aにより、切削片による吸引の詰まりをなくし、関節鏡22による視野を常に確保し易くなる。
以上説明したように、この実施形態に係る超音波処置アッセンブリ32及び超音波処置具42によれば、以下のことが言える。
処置部64の切削領域66で切削処理した切削片が吸引開口76aに引っ掛かる場合がある。外シース74の先端部75に、任意の径の貫通孔75aを任意の方向に任意の個数形成することにより、吸引開口76aが塞がっても、その貫通孔75aから吸引を行っているので吸引路76を通して吸引が停止することを防止できる。このため、関節鏡22の観察視野を常に確保することができる。
[第4実施形態]
次に、第4実施形態について、図7Aから図8Bを用いて説明する。この実施形態は第1から第3実施形態の変形例であって、第1から第3実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
次に、第4実施形態について、図7Aから図8Bを用いて説明する。この実施形態は第1から第3実施形態の変形例であって、第1から第3実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
内シース72は、その先端72aから基端側に向かって所定の位置まで延出された切欠部77を有する。切欠部77は、特に内シース72の先端部73に形成されている。切欠部77は、中心軸C1に沿って平行に真っ直ぐに形成されている。内シース72の中心軸C1に沿う方向における切欠部77の長さは、中心軸C1における先端部73の長さと略同等である。切欠部77は、中心軸C1に沿って平行に真っ直ぐに形成された互いに対向する1対の縁部77aと、縁部77aの基端に設けられる半円形の底部77bとを含む。1対の縁部77aは、その基端で底部77bに滑らかに連続している。切欠部77は、内シース72の先端部73のうち、プローブ52の処置部64の切削領域66があり、突出する側に形成されている。
切欠部77のうち、内シース72の中心軸C1に直交する、1対の縁部77a間の幅Wは、関節鏡22の先端部の最小部位の直径D(図4A及び図4B参照)よりも小さい。また、内シース72の先端部73の内周面とプローブ52の処置部64の湾曲部64aとの間には、適宜の隙間が形成されている。
この実施形態に係る処置システム10の作用について説明する。
内シース72の先端部73に、関節鏡22の直径Dよりも小さい幅Wの切欠部(溝)77を形成している。このため、図4Bに示すように、関節鏡22で骨のうちの削りたい部位Sを観察するとともに、処置部64の切削領域66を観察する際、内シース72の切欠部77を通して両者が観察される。
内シース72の先端部73に、関節鏡22の直径Dよりも小さい幅Wの切欠部(溝)77を形成している。このため、図4Bに示すように、関節鏡22で骨のうちの削りたい部位Sを観察するとともに、処置部64の切削領域66を観察する際、内シース72の切欠部77を通して両者が観察される。
そして、関節鏡22が切欠部77に当接した場合であっても、関節鏡22がプローブ52の処置部64の湾曲部64aに接触することが防止されている。特に、処置部64の切削領域66が骨のうちの削りたい部位Sに当接されると、湾曲部64aが切欠部77から遠ざかる方向に弾性変形する。このため、プローブ52の処置部64の湾曲部64aは、内シース72の先端部73の切欠部77との間の距離が大きくなる。したがって、超音波振動が伝達された状態のプローブ52に対して、関節鏡22が接触するのが防止されている。
以上説明したように、この実施形態に係る超音波処置アッセンブリ32及び超音波処置具42によれば、以下のことが言える。
内シース72を、先端部73の分だけ外シース74の先端74aに対して先端側に延長している。この実施形態において、内シース72の先端部73に切欠部77を形成したことにより、切欠部77が存在しない場合よりも、内シース72の切欠部77を通して関節鏡22の視野内に処置部64の切削領域66を入れ易い。また、内シース72の切欠部77を通して処置部64の切削領域66を関節鏡22で観察しながら、骨のうちの削りたい部位Sを観察することができる。したがって、関節鏡22の視野を確保できる。
また、内シース72に切欠部77の幅Wが関節鏡22の直径Dよりも小さい。このため、関節鏡22がプローブ52の処置部64に接触することを防止できる。
したがって、内シース72に形成した切欠部77の幅Wを関節鏡22の直径Dよりも小さくしたことにより、プローブ52の処置部64に関節鏡22が接触するのを防止しつつ、処置部64の切削領域66を関節鏡22視下に入れ易くすることができる。
[第5実施形態]
次に、第5実施形態について、図9A及び図9Bを用いて説明する。この実施形態は第1から第4実施形態の変形例であるが、このうち、特に第4実施形態の変形例であって、第1から第4実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
次に、第5実施形態について、図9A及び図9Bを用いて説明する。この実施形態は第1から第4実施形態の変形例であるが、このうち、特に第4実施形態の変形例であって、第1から第4実施形態で説明した部材と同一の部材又は同一の機能を有する部材には同一の符号を付し、詳しい説明を省略する。
図9Aに示すように、内シース72の先端部73には、切欠部177が形成されている。切欠部177は、1対の縁部177aと、底部177bとを有する。1対の縁部177aは、内シース72の中心軸C1に対して平行ではなく、斜めに形成されている。すなわち、切欠部177は、内シース72の中心軸C1に対して傾斜して形成されている。1対の縁部177aは互いに平行であることが好適である。
関節鏡22は、処置対象の骨を切削する処置を行う場合、処置部64の切削領域66を斜め後方から観察することが殆どである。このため、関節鏡22及び処置部64の位置関係が決まった状態であれば、切欠部177の縁部177aは、真っ直ぐの状態でも良いが、斜めに延出されていることで、関節鏡22で処置部64の切削領域66を観察し易くすることができる。特に、関節鏡22と処置具42とが図4Aに示す状態である場合、すなわち、処置具42に対して右側後方に関節鏡22を配置する場合、図9Aに示す形状の切欠部177が形成されていると、処置領域66を観察し易くすることができる。
図9A中、切欠部177が延出されている方向は、図9Bに示す状態であっても良い。これらは、ポータル102,104(図1参照)の位置関係が決まっている場合、処置部64をより観察し易くするのに寄与できる。特に、関節鏡22と処置具42とが図4Aに示す状態とは反対に、処置具42に対して左側後方に関節鏡22を配置する場合、図9Bに示す形状の切欠部177が形成されていると、処置領域66を観察し易くすることができる。
ここでは、図9A及び図9Bに示すように、切欠部177の1対の縁部177aが互いに平行である例について説明した。その他、1対の縁部177aは、内シース72の先端72aに向かうにつれて切欠幅が小さくなっていることも好適である。
これまで、幾つかの実施形態について図面を参照しながら具体的に説明したが、この発明は、上述した実施形態に限定されるものではなく、その要旨を逸脱しない範囲で行なわれるすべての実施を含む。
10…処置システム、12…関節鏡装置、14…処置装置、16…灌流装置、22…関節鏡、32…超音波処置アッセンブリ、36…スイッチ(フットスイッチ)、42…超音波処置具、44…超音波振動子ユニット、44a…超音波振動子、52…プローブ、54…シースユニット、56…ハンドル、62…本体部、63…先端部、64…処置部、64a…湾曲部、66…切削領域、72…内シース、73…先端部、74…外シース、C0,C1,C2…中心軸。
Claims (12)
- 関節鏡視下手術に使用される超音波処置具であって、
超音波振動を伝達する本体部と、前記本体部の先端側に設けられ、前記超音波振動の伝達により硬組織及び/又は軟組織を切削可能な処置部とを有するプローブと、
前記プローブにおける前記本体部の外周面を覆う内シースと、前記内シースの外周面を覆い、前記内シースの外周面との間に吸引路を形成する外シースとを有し、前記内シースの先端が前記外シースの先端よりも前記プローブの前記処置部に近接する位置に延出されているシースユニットと
を具備する、超音波処置具。 - 前記外シースの先端部には、前記外シースの外周面と内周面との間を連通する複数の貫通孔が形成されている、請求項1に記載の超音波処置具。
- 前記内シースは、前記先端から基端側に向かって延出された切欠部を有する、請求項1に記載の超音波処置具。
- 前記切欠部のうち、前記内シースの中心軸に直交する幅は、関節鏡の直径よりも小さい、請求項3に記載の超音波処置具。
- 前記切欠部の縁部は、前記内シースの中心軸に平行に真っ直ぐに形成されている、請求項3に記載の超音波処置具。
- 前記切欠部の縁部は、前記内シースの中心軸に対して傾斜して形成されている、請求項3に記載の超音波処置具。
- 前記処置部は、前記プローブの中心軸に沿う方向とは異なる方向に突出する切削領域を備え、
前記切欠部は、前記内シースのうち、前記切削領域がある側に形成されている、請求項3に記載の超音波処置具。 - 前記内シースの肉厚は、前記外シースの肉厚よりも薄い、請求項1に記載の超音波処置具。
- 前記内シースの先端部は、その基端側から先端側に向かうにつれて縮径している、請求項1に記載の超音波処置具。
- 前記シースユニットの基端部に設けられ、前記吸引路を吸引源に接続するコネクタを具備する、請求項1に記載の超音波処置具。
- 前記プローブは、前記超音波振動が伝達されたときに前記処置部に振動の腹位置が規定される長さを有し、
前記内シースの先端は、前記プローブのうち、前記振動の前記腹位置から1つ目の振動の節位置に相当する位置よりも先端側にある、請求項1に記載の超音波処置具。 - 請求項1に記載の超音波処置具と、
前記超音波処置具に着脱可能に取り付けられる超音波振動子ユニットと
を具備する、超音波処置アッセンブリ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15898971.5A EP3243467B1 (en) | 2015-07-23 | 2015-11-30 | Ultrasound treatment instrument and ultrasound treatment assembly |
| CN201580075895.8A CN107205763B (zh) | 2015-07-23 | 2015-11-30 | 超声波处置器具和超声波处置组件 |
| JP2016545944A JP6147440B1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| US15/673,682 US20170367727A1 (en) | 2015-07-23 | 2017-08-10 | Ultrasonic treatment instrument and ultrasonic treatment assembly |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201562196158P | 2015-07-23 | 2015-07-23 | |
| US62/196158 | 2015-07-23 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/673,682 Continuation US20170367727A1 (en) | 2015-07-23 | 2017-08-10 | Ultrasonic treatment instrument and ultrasonic treatment assembly |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017013813A1 true WO2017013813A1 (ja) | 2017-01-26 |
Family
ID=57834216
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/083589 WO2017013813A1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| PCT/JP2015/083592 WO2017013815A1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| PCT/JP2015/083591 WO2017013814A1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| PCT/JP2016/053247 WO2017013887A1 (ja) | 2015-07-23 | 2016-02-03 | 超音波プローブ |
| PCT/JP2016/053246 WO2017013886A1 (ja) | 2015-07-23 | 2016-02-03 | 関節鏡視下手術用の超音波プローブ及び超音波プローブユニット |
Family Applications After (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/083592 WO2017013815A1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| PCT/JP2015/083591 WO2017013814A1 (ja) | 2015-07-23 | 2015-11-30 | 超音波処置具及び超音波処置アッセンブリ |
| PCT/JP2016/053247 WO2017013887A1 (ja) | 2015-07-23 | 2016-02-03 | 超音波プローブ |
| PCT/JP2016/053246 WO2017013886A1 (ja) | 2015-07-23 | 2016-02-03 | 関節鏡視下手術用の超音波プローブ及び超音波プローブユニット |
Country Status (5)
| Country | Link |
|---|---|
| US (4) | US20180206879A1 (ja) |
| EP (4) | EP3326559A4 (ja) |
| JP (4) | JPWO2017013815A1 (ja) |
| CN (4) | CN107205763B (ja) |
| WO (5) | WO2017013813A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019097689A1 (ja) * | 2017-11-17 | 2019-05-23 | オリンパス株式会社 | 超音波処置具 |
| JPWO2020250331A1 (ja) * | 2019-06-12 | 2020-12-17 | ||
| JP2021531741A (ja) * | 2019-02-01 | 2021-11-25 | 成都導勝生物技術有限公司Chengdu Daosheng Biotechnology Co., Ltd | 超音波原理に基づく手持ち式動植物組織アブレーション装置 |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10123816B2 (en) * | 2016-03-28 | 2018-11-13 | Olympus Corporation | Arthroendoscopical surgical method using ultrasonic treatment tool |
| WO2018078828A1 (ja) * | 2016-10-28 | 2018-05-03 | オリンパス株式会社 | 超音波プローブ |
| EP3641655B1 (en) | 2017-06-23 | 2024-02-28 | Oral Diagnostix, LLC | Transoral ultrasound probe and method of use |
| JP7445670B2 (ja) * | 2019-01-15 | 2024-03-07 | ストライカー・ユーロピアン・オペレーションズ・リミテッド | 超音波外科用灌漑スリーブおよび関連アセンブリ |
| CN109652313B (zh) * | 2019-02-01 | 2024-03-08 | 成都导胜生物技术有限公司 | 基于超声原理的动植物组织消融仪 |
| CN109694826B (zh) * | 2019-02-01 | 2024-05-14 | 成都导胜生物技术有限公司 | 基于超声原理的动植物组织消融仪的手持式机械结构 |
| CN109609500B (zh) * | 2019-02-01 | 2020-10-09 | 成都导胜生物技术有限公司 | 利用基于超声原理的动植物组织消融仪快速提取rna的方法 |
| CN109609501B (zh) * | 2019-02-01 | 2021-03-16 | 成都导胜生物技术有限公司 | 利用基于超声原理的动植物组织消融仪快速提取rna、dna或蛋白质的方法 |
| US11786259B1 (en) * | 2019-05-28 | 2023-10-17 | Mirus Llc | Systems and methods for ultrasonically-assisted placement of orthopedic implants |
| CN115066218A (zh) * | 2020-02-05 | 2022-09-16 | 奥林巴斯株式会社 | 超声波探头及处置系统 |
| US20240197354A1 (en) * | 2022-12-19 | 2024-06-20 | Medtronic Ps Medical, Inc. | Irrigated ultrasonic device with features for dissecting dense tissue |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005516663A (ja) * | 2002-02-05 | 2005-06-09 | オムニソニクス メディカル テクノロジーズ インコーポレイテッド | 横モードで動作する超音波医療機器を用いた婦人科疾患の治療装置および方法 |
| JP2005312675A (ja) * | 2004-04-28 | 2005-11-10 | Olympus Corp | 超音波処置具 |
| WO2011158792A1 (ja) * | 2010-06-17 | 2011-12-22 | オリンパスメディカルシステムズ株式会社 | 超音波吸引システム及び超音波吸引方法 |
Family Cites Families (43)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS4815110B1 (ja) * | 1968-10-14 | 1973-05-12 | ||
| JPS62172393A (ja) | 1986-01-24 | 1987-07-29 | 三菱電機株式会社 | 大形画像表示装置 |
| US5047043A (en) * | 1986-03-11 | 1991-09-10 | Olympus Optical Co., Ltd. | Resecting device for living organism tissue utilizing ultrasonic vibrations |
| JPS62268549A (ja) * | 1986-05-15 | 1987-11-21 | 住友ベークライト株式会社 | ハンドピ−ス |
| JPH0426092Y2 (ja) * | 1987-11-10 | 1992-06-23 | ||
| US5211625A (en) * | 1990-03-20 | 1993-05-18 | Olympus Optical Co., Ltd. | Ultrasonic treatment apparatus |
| JPH0759789A (ja) * | 1993-06-15 | 1995-03-07 | Sumitomo Bakelite Co Ltd | 外科手術用ハンドピース |
| JP3717595B2 (ja) * | 1996-06-07 | 2005-11-16 | オリンパス株式会社 | 超音波手術装置 |
| DE69838684T2 (de) * | 1997-12-23 | 2008-10-30 | Misonix Inc. | Ultraschallsonde mit isolierter äusserer kanüle |
| CA2276316C (en) * | 1998-06-29 | 2008-02-12 | Ethicon Endo-Surgery, Inc. | Method of balancing asymmetric ultrasonic surgical blades |
| JP2000254136A (ja) * | 1999-03-09 | 2000-09-19 | Olympus Optical Co Ltd | 超音波処置具 |
| US7322957B2 (en) * | 2000-02-01 | 2008-01-29 | Harold D. Kletschka | Angioplasty device and method of making same |
| DE10241702A1 (de) | 2002-09-09 | 2004-03-18 | Berchtold Holding Gmbh | Ultraschallinstrument |
| JP2003116870A (ja) * | 2002-10-23 | 2003-04-22 | Miwatec:Kk | 超音波ハンドピ−スとこれに使用する超音波ホ−ン |
| JP2005152098A (ja) * | 2003-11-21 | 2005-06-16 | Miwatec:Kk | 超音波ハンドピ−スとこれに使用する超音波ホ−ン |
| US20070016236A1 (en) * | 2005-07-18 | 2007-01-18 | Crescendo Technologies, Llc | Balanced ultrasonic curved blade |
| US8016843B2 (en) * | 2005-09-09 | 2011-09-13 | Alcon Research Ltd | Ultrasonic knife |
| WO2009088390A1 (en) * | 2008-01-11 | 2009-07-16 | Misonix Incorporated | Ultrasonic debrider probe |
| US8097011B2 (en) * | 2008-02-26 | 2012-01-17 | Olympus Medical Systems Corp. | Surgical treatment apparatus |
| US20090270891A1 (en) * | 2008-04-18 | 2009-10-29 | Jean Michael Beaupre | Balanced ultrasonic curved blade |
| US8287485B2 (en) * | 2009-01-28 | 2012-10-16 | Olympus Medical Systems Corp. | Treatment system for surgery and control method of treatment system for surgery |
| US8951272B2 (en) * | 2010-02-11 | 2015-02-10 | Ethicon Endo-Surgery, Inc. | Seal arrangements for ultrasonically powered surgical instruments |
| US8469981B2 (en) | 2010-02-11 | 2013-06-25 | Ethicon Endo-Surgery, Inc. | Rotatable cutting implement arrangements for ultrasonic surgical instruments |
| US8579928B2 (en) | 2010-02-11 | 2013-11-12 | Ethicon Endo-Surgery, Inc. | Outer sheath and blade arrangements for ultrasonic surgical instruments |
| US9259234B2 (en) * | 2010-02-11 | 2016-02-16 | Ethicon Endo-Surgery, Llc | Ultrasonic surgical instruments with rotatable blade and hollow sheath arrangements |
| AU2011323287A1 (en) * | 2010-11-05 | 2013-05-23 | Ethicon Endo-Surgery, Inc. | Surgical instrument with modular clamp pad |
| JP5782763B2 (ja) * | 2011-03-17 | 2015-09-24 | セイコーエプソン株式会社 | 流体噴射装置 |
| DE102011086326A1 (de) * | 2011-11-15 | 2013-05-16 | Söring GmbH | Ultraschallchirurgisches Instrument |
| US20120109191A1 (en) * | 2011-12-13 | 2012-05-03 | Vascular Insights Llc | Adhesive-based varicose vein treatment |
| US9028504B2 (en) | 2012-03-02 | 2015-05-12 | A.M. Surgical, Inc. | Endoscopic surgical blade and method of use thereof |
| US20130231528A1 (en) * | 2012-03-05 | 2013-09-05 | Misonix Incorporated | Protective sleeve and associated surgical method |
| EP2883509A4 (en) * | 2012-08-07 | 2016-06-08 | Olympus Corp | ULTRASONIC SOUND AND METHOD FOR PRODUCING THE ULTRASONIC SOUND |
| JP2015535702A (ja) * | 2012-09-19 | 2015-12-17 | ナンヤン テクノロジカル ユニヴァーシティNanyang Technological University | フレキシブルマスター‐スレーブロボット内視鏡システム |
| CN104661608B (zh) * | 2012-09-24 | 2017-10-13 | 奥林巴斯株式会社 | 处理组件及其制造方法以及处理器具 |
| US9693897B2 (en) * | 2012-11-20 | 2017-07-04 | Alcon Research, Ltd. | Ultrasonic handpiece |
| CN203354612U (zh) * | 2013-07-22 | 2013-12-25 | 曹群 | 一种超声骨刀刀头 |
| WO2015045198A1 (ja) * | 2013-09-27 | 2015-04-02 | オリンパスメディカルシステムズ株式会社 | 処置具及び処置システム |
| CN105592812B (zh) | 2013-09-27 | 2018-04-24 | 奥林巴斯株式会社 | 处理器具及处理系统 |
| US10736686B2 (en) * | 2014-03-11 | 2020-08-11 | Michael Rontal | Surgical device employing a cantilevered beam dissector |
| US10213337B2 (en) * | 2014-04-16 | 2019-02-26 | Erre Quadro S.R.L. | Vitrectomy probe |
| GB201411381D0 (en) * | 2014-06-26 | 2014-08-13 | Sra Dev Ltd | Torsional revision tool |
| WO2016111052A1 (ja) * | 2015-01-07 | 2016-07-14 | オリンパス株式会社 | 超音波プローブ |
| EP3260064B1 (en) * | 2015-04-22 | 2020-11-18 | Olympus Corporation | Treatment device and treatment system |
-
2015
- 2015-11-30 WO PCT/JP2015/083589 patent/WO2017013813A1/ja active Application Filing
- 2015-11-30 WO PCT/JP2015/083592 patent/WO2017013815A1/ja active Application Filing
- 2015-11-30 EP EP15898972.3A patent/EP3326559A4/en not_active Withdrawn
- 2015-11-30 CN CN201580075895.8A patent/CN107205763B/zh active Active
- 2015-11-30 JP JP2016524543A patent/JPWO2017013815A1/ja active Pending
- 2015-11-30 CN CN201580081886.XA patent/CN107920850A/zh active Pending
- 2015-11-30 WO PCT/JP2015/083591 patent/WO2017013814A1/ja active Application Filing
- 2015-11-30 EP EP15898971.5A patent/EP3243467B1/en not_active Not-in-force
- 2015-11-30 JP JP2016545944A patent/JP6147440B1/ja not_active Expired - Fee Related
-
2016
- 2016-02-03 JP JP2017507024A patent/JP6147457B1/ja not_active Expired - Fee Related
- 2016-02-03 WO PCT/JP2016/053247 patent/WO2017013887A1/ja active Application Filing
- 2016-02-03 EP EP16827452.0A patent/EP3243468A4/en not_active Withdrawn
- 2016-02-03 WO PCT/JP2016/053246 patent/WO2017013886A1/ja active Application Filing
- 2016-02-03 EP EP16827453.8A patent/EP3326560A4/en not_active Withdrawn
- 2016-02-03 CN CN201680009794.5A patent/CN107205765B/zh not_active Expired - Fee Related
- 2016-02-03 JP JP2017513579A patent/JP6165389B2/ja active Active
- 2016-02-03 CN CN201680043367.9A patent/CN107847256B/zh active Active
-
2017
- 2017-08-10 US US15/674,153 patent/US20180206879A1/en not_active Abandoned
- 2017-08-10 US US15/673,682 patent/US20170367727A1/en not_active Abandoned
-
2018
- 2018-01-22 US US15/876,730 patent/US20180140872A1/en not_active Abandoned
- 2018-01-22 US US15/876,836 patent/US10905455B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005516663A (ja) * | 2002-02-05 | 2005-06-09 | オムニソニクス メディカル テクノロジーズ インコーポレイテッド | 横モードで動作する超音波医療機器を用いた婦人科疾患の治療装置および方法 |
| JP2005312675A (ja) * | 2004-04-28 | 2005-11-10 | Olympus Corp | 超音波処置具 |
| WO2011158792A1 (ja) * | 2010-06-17 | 2011-12-22 | オリンパスメディカルシステムズ株式会社 | 超音波吸引システム及び超音波吸引方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019097689A1 (ja) * | 2017-11-17 | 2019-05-23 | オリンパス株式会社 | 超音波処置具 |
| US11583307B2 (en) | 2017-11-17 | 2023-02-21 | Olympus Corporation | Ultrasonic transmitter unit |
| JP2021531741A (ja) * | 2019-02-01 | 2021-11-25 | 成都導勝生物技術有限公司Chengdu Daosheng Biotechnology Co., Ltd | 超音波原理に基づく手持ち式動植物組織アブレーション装置 |
| JP7136495B2 (ja) | 2019-02-01 | 2022-09-13 | 成都導勝生物技術有限公司 | 超音波原理に基づく手持ち式動植物組織アブレーション装置 |
| JPWO2020250331A1 (ja) * | 2019-06-12 | 2020-12-17 | ||
| WO2020250331A1 (ja) * | 2019-06-12 | 2020-12-17 | オリンパス株式会社 | 超音波処置具、超音波治療システム、内視鏡下手術システム、及び、内視鏡下手術方法 |
| JP7238119B2 (ja) | 2019-06-12 | 2023-03-13 | オリンパス株式会社 | 超音波処置具、超音波治療システム、及び、内視鏡下手術システム |
| USD974558S1 (en) | 2020-12-18 | 2023-01-03 | Stryker European Operations Limited | Ultrasonic knife |
| USD1045078S1 (en) | 2020-12-18 | 2024-10-01 | Stryker European Operations Limited | Ultrasonic knife |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3243467A1 (en) | 2017-11-15 |
| US20180140275A1 (en) | 2018-05-24 |
| US10905455B2 (en) | 2021-02-02 |
| EP3326559A1 (en) | 2018-05-30 |
| EP3326560A1 (en) | 2018-05-30 |
| EP3326560A4 (en) | 2019-04-10 |
| CN107847256B (zh) | 2020-12-15 |
| EP3326559A4 (en) | 2019-04-10 |
| US20180140872A1 (en) | 2018-05-24 |
| WO2017013815A1 (ja) | 2017-01-26 |
| CN107205763A (zh) | 2017-09-26 |
| CN107205765B (zh) | 2020-04-24 |
| WO2017013814A1 (ja) | 2017-01-26 |
| WO2017013887A1 (ja) | 2017-01-26 |
| EP3243467A4 (en) | 2018-09-05 |
| JPWO2017013886A1 (ja) | 2017-07-27 |
| CN107847256A (zh) | 2018-03-27 |
| JP6165389B2 (ja) | 2017-07-19 |
| US20180206879A1 (en) | 2018-07-26 |
| JPWO2017013815A1 (ja) | 2017-07-20 |
| JP6147457B1 (ja) | 2017-06-14 |
| WO2017013886A1 (ja) | 2017-01-26 |
| CN107205765A (zh) | 2017-09-26 |
| JP6147440B1 (ja) | 2017-06-14 |
| EP3243467B1 (en) | 2021-03-24 |
| JPWO2017013887A1 (ja) | 2017-07-20 |
| EP3243468A4 (en) | 2018-09-19 |
| JPWO2017013813A1 (ja) | 2017-07-27 |
| CN107205763B (zh) | 2020-11-10 |
| EP3243468A1 (en) | 2017-11-15 |
| CN107920850A (zh) | 2018-04-17 |
| US20170367727A1 (en) | 2017-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6147440B1 (ja) | 超音波処置具及び超音波処置アッセンブリ | |
| CN102781352B (zh) | 超声外科器械的外部护套和刀片构造 | |
| CN102858258B (zh) | 具有旋转切割工具的超声动力外科器械 | |
| CN102843980B (zh) | 超声外科器械的旋转切割工具构造 | |
| JP4472759B2 (ja) | 超音波処置装置 | |
| CN102843979B (zh) | 具有可旋转刀片和中空护套构造的超声外科器械 | |
| JP6132993B2 (ja) | 処置具、処置システム | |
| JP2015051274A (ja) | 遠位吸引機能付き外科用切削器具 | |
| KR20190011276A (ko) | 냉각 도관을 가진 초음파 수술 기구 | |
| US20220087706A1 (en) | Ultrasound treatment tool, ultrasound treatment system, and endoscopic surgery system | |
| JP6805264B2 (ja) | 超音波処置具、及び、超音波手術器具 | |
| JP6033503B1 (ja) | 超音波処置具及び超音波処置アッセンブリ | |
| WO2018078827A1 (ja) | 超音波プローブ及び超音波処置具 | |
| US10987122B2 (en) | Ultrasonic probe | |
| JP4800725B2 (ja) | 超音波手術器 | |
| JPH04180749A (ja) | 超音波処置装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| ENP | Entry into the national phase |
Ref document number: 2016545944 Country of ref document: JP Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15898971 Country of ref document: EP Kind code of ref document: A1 |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015898971 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |