WO2016194900A1 - 車両制御装置、及び車両制御方法 - Google Patents
車両制御装置、及び車両制御方法 Download PDFInfo
- Publication number
- WO2016194900A1 WO2016194900A1 PCT/JP2016/066020 JP2016066020W WO2016194900A1 WO 2016194900 A1 WO2016194900 A1 WO 2016194900A1 JP 2016066020 W JP2016066020 W JP 2016066020W WO 2016194900 A1 WO2016194900 A1 WO 2016194900A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- vehicle
- lane
- driver
- host vehicle
- unit
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0953—Predicting travel path or likelihood of collision the prediction being responsive to vehicle dynamic parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W2050/0062—Adapting control system settings
- B60W2050/0075—Automatic parameter input, automatic initialising or calibrating means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/14—Yaw
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/10—Historical data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/93185—Controlling the brakes
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/02—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00
- G01S7/41—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S13/00 using analysis of echo signal for target characterisation; Target signature; Target cross-section
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Human Computer Interaction (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
Abstract
車両制御装置(10)は、自車両前方の所定距離に存在する物体(M2,M3)に対して自車両(M1)の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出する。そして、車両制御装置(10)は、回避操作のタイミングの分布に基づいて、その回避操作と運転者の実際の操作とが干渉しないように、運転者に対する警報の出力時期を設定する。更に、車両制御装置(10)は、自車両前方の物体の位置に基づいて、自車両の衝突の危険性を判定し、その自車両の衝突の危険性の判定結果に基づいて、警報の出力時期を変更する。
Description
本出願は、2015年6月2日に出願された日本出願番号2015-112613号に基づくもので、ここにその記載内容を援用する。
本発明は、物体と自車両との衝突を防止するために警報を出力する車両制御装置、及び車両制御方法に関する。
PCS(Pre-crash safety system)等の衝突回避又は衝突による被害低減のための安全システムが開発されている。安全システムにおいては、自車両に先行車等が接近した際に警報が出力される。しかし警報を行うタイミングが早すぎると、運転者による物体の回避操作と警報出力とが干渉し、運転者の不快感を招くおそれがある。
そこで特許文献1では、自車両の運転者が先行車両に対して所定距離になった際の回避操作のタイミングの履歴を蓄積する。そして、運転者の実際の操作と回避操作のタイミングの履歴とを比較して、運転者に対する警報を行っている。以上により、運転者による物体の回避操作のタイミングと、警報出力のタイミングとが干渉しないようにしている。
しかし、自車両と先行車両との車幅方向の位置関係、自車両に対する先行車両の接近状態等によって、自車両の衝突の危険性が変わる。特許文献1では、この点については考慮されておらず、運転者に対する警報をより適切に実施するためには改善の余地があるといえる。
本発明は、上記に鑑みてなされたものであり、運転者に対する警報をより適切なタイミングで実施できる車両制御技術を提供することを主たる目的とするものである。
本発明の一態様による車両制御装置は、自車両前方の所定距離に存在する物体(M2,M3)に対して自車両(M1)の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出する分布算出部と、前記回避操作のタイミングの分布に基づいて、その回避操作と前記運転者の実際の操作とが干渉しないように前記運転者に対する警報の出力時期を設定する警報出力設定部と、前記自車両前方の物体の位置に基づいて、自車両の衝突の危険性を判定する判定部と、前記自車両の衝突の危険性に基づいて、前記警報出力設定部で設定された警報の出力時期を変更する変更部と、を備える。
このような車両制御装置によれば、自車両前方の物体の位置に基づいて、自車両との衝突の危険性を判定する。そして、その判定結果に基づいて、回避操作のタイミングの分布に基づき設定された警報の出力時期を変更するようにした。この場合、運転者の回避操作と警報との干渉を抑えることができ、ひいては、運転者に対する不要な警報の出力を抑制できる。
本発明の上述およびその他の目的、特徴、および利点は、好ましい実施形態に関する以下の詳細な説明を添付の図面と共に読めば、容易に明らかになり、十分に理解できるであろう。
以下、本発明の実施形態を、添付図面を参照しながら、より詳細に説明する。しかし、本発明は、多くの異なる形態で実施されてもよく、本明細書で説明される実施形態に限定されると解釈されるべきではない。むしろ、これらの実施形態は、この発明の開示を徹底的でかつ完全にし、本発明の範囲を当業者に完全に伝えるために、提供される。尚、類似の符号は、図面全体にわたって類似の構成要素を示す。
本実施形態に係る車両制御システムは、車両に搭載され(以下、この装置搭載車両を自車両と称する)、自車両の前方に存在する物体を検出し、その物体との衝突を回避/軽減すべく各種制御を行うPCSシステムとして機能する。
図1において、自車両に搭載される車両制御システム100は、車両制御装置であるECU(electrical control unit)10、レーダ21、撮像装置22、各種センサ、警報装置40、制動装置50を備えて構成されている。
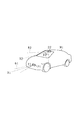
レーダ21は、ミリ波やレーザ等の指向性のある電磁波を利用して自車両前方の物体をレーダ物標LTとして検出するものであり、図2に示すように、自車両M1の前部においてその光軸X1が車両前方を向くように取り付けられている。そして所定時間ごとに、光軸X1を中心に車両前方に向かって所定角度θ1の範囲に亘って広がる領域61をレーダ信号により走査するとともに、車外の物体の表面で反射された電磁波を受信し、ECU10に入力する。
なお、レーダ21においては、レーダの反射波を所定以上の受信強度で受信できた場合に物体を検出したことになる。そのため、レーダ21は所定の閾値以上の受信強度で反射波を受信する毎に、1個のレーダ物標LTを受信したとして、そのレーダ物標LTをECU10に入力する。
レーダ物標LTには、自車両の進行方向の物体との距離や相対速度、自車両の車幅方向の位置を表す横位置等の情報が含まれている。
撮像装置22は、CCDカメラ、単眼カメラ、ステレオカメラ等であり、図2に示すように、自車両M1のフロントガラスの上端付近等に設置されている。そして所定時間毎に、撮像軸X2を中心に車両前方に向かって所定角度θ2の範囲で広がる領域62を撮影して撮影画像を取得する。そして、撮像画像を画像処理することで物体を画像物標GTとして取得し、ECU10に入力する。
画像物標GTには、自車両の進行方向における物体との距離や相対速度、自車両の車幅方向の位置を表す横位置に加えて、物体の横幅等の情報が含まれている。そのため、ECU10は、画像物標GTを所定の幅を有する情報として認識することとなる。
各種センサとしては、ヨーレートセンサ23、車速センサ24、操舵角センサ25が設けられている。ヨーレートセンサ23は、車両の旋回角速度(ヨーレートγ)を検出する周知のセンサであり、車速センサ24は、車輪の回転速度に基づき自車両の速度(自車速V)を検出する。操舵角センサ25は、自車両のステアリングホイールが回転操作された角度を操舵角として検出する。
警報装置40は、スピーカやディスプレイ等であり、音声や画像など、運転者が視覚や聴覚を用いて認識可能な状態で警報を出力するのに用いられる。
制動装置50は、シートベルト、ブレーキ等であり、シートベルトの巻き上げにより運転者の衝突被害を緩和したり、ブレーキ操作で衝突速度を低減したりするのに用いられる。
ECU10は、車両制御システムの制御を行う電子制御ユニットであり、CPU(central processing unit)を主体として構成され、ROM(read-only memory),RAM(random access memory)、入出力インターフェース等を備えて構成されている。ECU10のこれから述べる各種機能(図1Bも参照)は、CPUが、ROMに格納されているプログラムを実行することで実現される。ECU10は、レーダ21及び撮像装置22で取得した各物標の情報に基づいて、自車両以外の物体(車両、障害物、歩行者等)を検出する。そして、これらの物体と衝突する可能性があるか否かを判定し、衝突する可能性が高いと判定した場合には警報装置40や制動装置50を作動させる。
なおECU10は、自車両と物体(先行車両、対向車両等)との衝突の緊急度に応じて警報装置40の作動態様を切り替える。例えば衝突の緊急度が低度である場合には、物体の存在について説明するガイド音声の出力を行う。衝突の緊急度が中度の場合には、物体の位置に応じた方向から運転者に指向するように警告音を出力する。そして衝突の緊急度が高度である場合には、その物体に対する衝突回避を促すための追突警報PRE(PERCEPTUAL RISK ESTIMATE)を出力する。
ところで、追突警報PREについてはいち早く警報装置40が作動されることが好ましい。しかし、追突警報PREのタイミングが早すぎると、運転者による回避操作と警報の出力タイミングとが干渉し、運転者に不快感を与えてしまう。
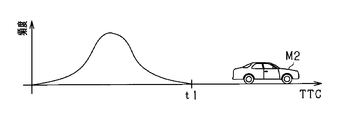
そこで、ECU10は、自車両の運転者が先行車両に対して所定距離になった際の運転者の回避操作のタイミングの履歴を蓄積することで、運転者による回避操作の頻度の分布を得る。例えば、自車両M1と先行車両M2とが所定距離に接近した場面において、回避操作として運転者がブレーキを踏むタイミングをモニタリングすることで、図3に示すような運転者の回避操作の頻度の分布が得られる。
なお、図3において、横軸は、自車両前方の先行車両M2等の物体に衝突するまでの時間に対応する衝突余裕時間TTC(Time to Collision)である。TTCとは、このままの自車速度Vsで走行した場合に何秒後に衝突するか示す評価値であり、通常、TTCが小さいほど衝突の危険度は高くなり(図3右側)、TTCが大きいほど衝突の危険度は低くなる(図3左側)。
そして、このような運転者の回避操作の頻度の分布とTTCとの対応関係において、運転者により高頻度で回避操作が行われるTTCの範囲内で、追突警報PREが出力されると、運転者の回避操作と追突警報PREとが干渉するおそれがある。そこで、運転者の回避操作が行われる可能性のあるTTC以降のタイミング(例えば時刻t1)を、追突警報PREの出力タイミングに設定する。以上により、運転者の回避操作と追突警報PREとの干渉を回避できる。
ところで、自車両と先行車両との位置関係、自車両に対する先行車両の接近状態等に応じて、自車両と先行車両等との衝突の危険性が変化する。そして衝突の危険性が低い状況においては、運転者が自車両前方の物体に気が付いてから回避操作を遅めにすることが考えられる。そのため、衝突の危険性が低い状況においては、運転者の回避モデルに基づき設定されたタイミングで追突警報PREを出力したとしても、運転者の回避操作と追突警報PREの出力タイミングとが干渉する可能性がある。
そこで、本実施形態のECU10は、自車両の衝突の危険性を考慮して、追突警報PREの出力タイミングを変更することで、より不要な追突警報PREの出力が抑制されるようにする。
例えば、図4に示すように、自車両M1の前方に先行車両M2がある状況で、自車両M1の車幅(自車幅)と先行車両M2の車幅とがオーバーラップしている場合には、その割合(ラップ率)に応じて衝突の危険性が変化する。すなわち、図4では、自車両M1と先行車両M2とのラップ率(以下、先行車ラップ率)が小さくなるほど(紙面左側となるほど)、衝突の危険性が低下し、運転者が先行車両M2に気が付いてから回避操作をより遅めに実施することが想定される。
そこでECU10は、自車線において、自車両M1の前方に先行車両M2があり、自車両M1の横位置と先行車両M2の横位置とがオーバーラップしている場合には、衝突の危険性を示すパラメータとして先行車ラップ率を求める。そして、先行車ラップ率に基づいて運転者の運転履歴に基づき設定される追突警報PREの出力タイミングを変更する。すなわち、先行車ラップ率が小さくなり、運転者による操舵回避のタイミングがより遅めに実施される可能性が高くなるほど、追突警報PREを出力するタイミングを遅延側に変更する。
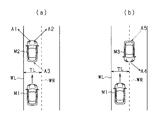
また、図5(a)と図5(b)に示すように、先行車両M2や対向車両M3が、自車両M1が走行する自車線の左右位置にある白線WL,WRを跨いでいる場合(跨ぐ可能性がある場合)には、先行車両M2や対向車両M3が進路変更している可能性があり、この場合にも、自車両M1に対する衝突の危険性が変化する可能性がある。
例えば、図5(a)において、先行車両M2が自車両M1から離反する方向A1,A2(別車線)に横移動していれば衝突の危険性が低下する。一方、先行車両M2が先行車両M2に接近する方向A3に横移動していれば衝突の危険性が高まる。また図5(b)に示すように、対向車両M3が自車両M1から離反する方向A4に移動する場合には衝突の危険性が低下する。一方、対向車両M3が自車両M1に接近する方向A5に横移動していれば衝突の危険性が高まる。
そこでECU10は、移動状態判定部(33)として、先行車両M2(又は対向車両M3)が白線WL(又は白線WR)を超えて自車線TLにオーバーラップしている場合には、先行車両M2(又は対向車両M3)が自車両M1に対して接近しているか離間しているかを判定する。なお接近状態及び離間状態は、先行車両M2(又は対向車両M3)の横速度から求められる。横速度とは、自車線TLに直交する方向の移動速度である。
そして先行車両M2等が自車両M1から離間していれば、衝突の危険性を示すパラメータとして先行車両M2と自車線とのラップ率(以下、自車線ラップ率)を求める。そして自車線ラップ率を用いて、運転者の運転履歴に基づき設定される追突警報PREの出力タイミングを変更する。すなわち、自車線ラップ率が小さくなり、運転者による操舵回避のタイミングがより遅く実施される可能性が高くなるほど、追突警報PREを出力するタイミングを遅延側に変更する。
なお、自車両の前方の物体(先行車両、対向車両)が、自車両にオーバーラップするとともに、白線を跨いで自車線にもオーバーラップする状況も想定される。この場合には、先行車ラップ率に基づいて変更した追突警報PREの出力タイミングと、自車線ラップ率に基づいて変更した追突警報PREの出力タイミングのうち、警報の出力タイミングが早い方を、追突警報PREの出力時期に選択する。これにより、運転者の回避操作との干渉を回避しつつ、衝突回避のための追突警報PREを適切なタイミングで出力できる。
図1の説明に戻り、ECU10は、レーダ物標取得部11、画像物標取得部12、フュージョン処理部13、横位置補正部14、車両判定部31、予測進路推定部32、移動状態判定部33、先行車ラップ率算出部15、自車線ラップ率算出部16、推定モデル生成部17、追突警報設定部18、車両制御部19を備えている。
レーダ物標取得部11は、所定周期毎にレーダ21が検出したレーダ物標LTの情報を取得する。画像物標取得部12は、所定周期毎に撮像装置22が検出した画像物標GTの情報を取得する。
フュージョン処理部13は、レーダ物標LTと画像物標GTとを融合(フュージョン)してフュージョン物標FSNを生成する。詳しくは、レーダ物標LTの距離や相対速度により、フュージョン物標の自車両の進行方向の位置を特定し、画像物標GTの横幅や横位置によりフュージョン物標の自車両の車幅方向の位置を特定する。
このように、レーダ物標LTと画像物標GTを用いてフュージョン物標FSNを生成し、フュージョン物標FSNにより物体の位置を特定する場合、レーダ21と撮像装置22とが取得した情報のうち、精度が高い方の情報を用いて物体の位置が特定されることとなり、物体の位置の認識精度を向上できる。
なお、フュージョン物標FSNが生成された場合には、物体の車幅方向の端部の横位置は、フュージョン物標FSNの横位置により特定できる。これ以外にも、画像物標GTから取得される左右の横位置(左横位置、右横位置)のうち、自車両に接近する側を制御対象の物体の横位置に選択してもよい。
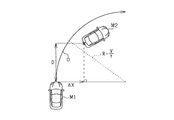
ところで、自車両がカーブを走行する場合には、自車線に対する物体の横位置の距離がその影響を受けて変化する。そこで、自車両の予測進路の曲率を推定する予測進路推定部32により、自車両の予測進路のカーブ半径(曲率の逆数)である推定Rを求める。そして横位置補正部14は推定Rを用いて物体の横位置を補正する。
詳しくは、図6において、車速センサ24で検出した自車速V、ヨーレートセンサ23で検出したヨーレートγに基づき、推定R=V/γとして算出する。そして、推定Rと、先行車両M2との相対距離Dを用いて、横位置の補正値ΔxをΔx=D・D/2Rとして算出する。そして算出した補正値Δxを用いて、FSN横位置Y1又は画像物標GTから求められる物体の横位置を補正する。この際、補正後の各横位置を比較することにより、自車線Oとの距離が最も短い横位置を、PCS制御による制御対象の横位置に選択するとよい。
なお推定Rがゼロとなる自車両の停止中や、推定Rが所定の閾値よりも大きくなる自車両の直進走行時には、補正値Δxによる補正を行わないようにする。これにより、例えば、直進とみなせる推定Rの大きい領域においては、運転者のふらつきの影響を排除しつつ、PCS横位置の算出精度を向上できる。
なお、レーダ物標LTと画像物標GTがフュージョンしていない場合、すなわち物体がレーダ21及び撮像装置22のいずれか一方のみで検出されている場合には、レーダ21又は撮像装置22で取得した物標情報に基づいて物体の位置が特定されてもよい。詳しくは、レーダ物標LTのみが検出された場合には、レーダ物標LTを用いて物体の位置(距離、横位置等)を特定する。画像物標GTのみが検出された場合には、画像物標GTを用いて物体の位置(距離、横位置等)を特定する。
図1Bにおいて、先行車ラップ率算出部15は、衝突の危険性を示すパラメータとして先行車ラップ率を算出する。例えば、先行車ラップ率は、先行車両と自車両との回避余裕幅を用いて算出できる。回避余裕幅は、自車両の車幅および自車両と先行車両との車幅方向の重なり量から算出できる。自車両と先行車両の車幅方向の重なり量は、例えば先行車両の横位置と、自車両の横位置とを比較することで求められる。
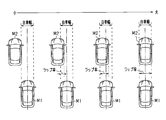
先行車両と自車両とのラップ状態は、自車両と先行車両との位置関係、車幅の大小関係に応じて、図7に示す3つのパターンに分類できる。すなわち、図7(a)に示すように、自車両M1に対して先行車両M2がオフセットしている状態。図7(b)に示すように、先行車両M2の車幅が自車両M1の車幅よりも大きいことによって、先行車両M2に自車両M1の全体がオーバーラップしている状態。図7(c)に示すように、先行車両M2の車幅が自車両M1の車幅よりも狭いことによって、先行車両M2が自車両M1の車幅内に含まれている状態、以上の3つのパターンである。そしてこれらの各パターンの先行車ラップ率は、例えば次のように算出される。
図7(a)の場合には、自車両M1の横位置と先行車両の横位置との差から、回避余裕幅Xaを算出し、自車両の車幅X0から回避余裕幅Xaを減算することで先行車ラップ率を求める。図7(b)の場合には、自車両の回避余裕幅Xa=0であるため、先行車ラップ率=100%となる。図7(c)の場合には、先行車両M2に対して自車両M1の左右に回避余裕幅が生じているが、運転者は回避余裕幅が大きい側に回避操作することが想定される。そこでこの場合には、大きい方の回避余裕幅Xa(ここでは自車両の右側の回避余裕幅Xa)を、自車両の車幅X0から減算して先行車ラップ率を算出する。
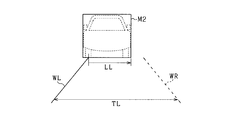
図1Bにおいて、自車線ラップ率算出部16は、衝突の危険性を示すパラメータとして、自車線ラップ率を算出する。ここで自車線ラップ率の算出について図8を用いて説明する。図8は撮像装置22で取得された撮影画像であり、自車線TLの左側の白線WL、右側の白線WRは撮像画像の画像処理で検出される。また、先行車両M2がFSN物標として検出されている。この場合、先行車両M2が左側の白線WLにオーバーラップしているため、左側の白線WLよりも自車線の内側の幅LLが自車線ラップ率として算出される。
ところで、先に述べたように、先行車両等が白線を跨いでいる場合においては、先行車両等が隣接レーンに移動中の場合、すなわち先行車両等が自車両から離反する方向に移動中の場合には、衝突の危険性が低下する。そこで本実施形態では、先行車両が自車両から離反する方向に横移動していることを条件に、自車線ラップ率を算出し、自車線ラップ率を用いて、追突警報PREの出力タイミングを変更する。
先行車ラップ率算出部15と自車線ラップ率算出部16は、自車両前方の物体の位置に基づいて、自車両の衝突の危険性を判定する判定部34(図1B参照)を構成する。自車線ラップ率算出部16と先行車ラップ率算出部15はそれぞれ、自車両が走行する自車線に物体がオーバーラップしている際に、該物体と自車線とのラップ率である自車線ラップ率に基づき衝突の危険性を判定する第1判定部16と、自車両と先行車両とのラップ率である先行車ラップ率に基づき衝突の危険性を判定する第2判定部15とに相当する。
推定モデル生成部17は、運転者による回避操作の頻度の分布を定式化することで、運転者による回避操作のタイミングを推定する推定モデルを生成する。例えば、式(1)を用いて、推定モデルを生成する。
また本実施形態の推定モデル生成部17は、先行車ラップ率がある場合には、先行車ラップ率から上記の演算に使用する係数を求める。そして求めた係数を式(1)に代入することで、推定モデルを変更する。
本実施形態では、式(1)の係数αに代えて、先行車ラップ率に基づき算出した係数α1を使用して、推定モデルを変更する。なお係数α1は、図9(a)に示す先行車ラップ率と係数α1との相関関係を用いて算出される。なお、図9(a)では先行車ラップ率が小さくなるほど係数α1が小さい値に設定されるようになっている。そのため、先行車ラップ率が小さく衝突の危険性が低くなるほど、推定モデルにより推定される運転者の回避操作のタイミングが遅延側にシフトされることとなり、追突警報PREの出力タイミングTPERを遅延側に変更することができる。以上により、運転者の回避操作と追突警報PREとの干渉を抑えつつ、不要な警報が出力されることを抑制することができる。
同様に、推定モデル生成部17は、自車線ラップ率がある場合には、自車線ラップ率から上記の演算に使用する係数を求める。詳しくは、式(1)の係数αに代えて、自車線ラップ率に基づき算出した係数α2を使用して、推定モデルを変更する。なお係数α2は、図9(b)に示す自車線ラップ率と係数α2との相関関係を用いて算出される。図9(b)においても自車線ラップ率が小さくなるほど係数α2が小さい値に設定されるようになっている。そのため、自車線ラップ率が小さく衝突の危険性が低くなるほど、推定モデルにより推定される運転者の回避操作のタイミングが遅延側にシフトされることとなり、追突警報PREの出力タイミングTPERを遅延側に変更することができる。以上により、運転者の回避操作と追突警報PREとの干渉を抑えつつ、不要な警報が出力されることを抑制することができる。
図1Bに示すように、推定モデル生成部17は、機能ブロックとして、分布算出部35と、警報出力設定部36と、変更部37とを有する。
分布算出部35は、自車両前方の所定距離に存在する物体に対して自車両の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出するものであるが、本実施形態では、上記の様に、運転者による回避操作の頻度の分布を定式化することで、運転者による回避操作のタイミングを推定する推定モデルを使用している。
分布算出部35は、自車両前方の所定距離に存在する物体に対して自車両の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出するものであるが、本実施形態では、上記の様に、運転者による回避操作の頻度の分布を定式化することで、運転者による回避操作のタイミングを推定する推定モデルを使用している。
警報出力設定部36は、回避操作のタイミングの分布に基づいて、その回避操作と運転者の実際の操作とが干渉しないように運転者に対する警報の出力時期を設定するものであるが、本実施形態では、推定モデルから推定される回避操作のタイミングに基づいて、その回避操作と運転者の実際の操作とが干渉しないように運転者に対する警報の出力時期(本実施形態では追突警報PREの出力タイミングTPREを)を設定している。
変更部37は、判定部34で判定された自車両の衝突の危険性に基づいて、警報出力設定部36で設定された警報の出力時期を変更する。本実施形態では、衝突の危険性としては、判定部34の自車線ラップ率算出部16において、前記自車両が走行する自車線に前記物体がオーバーラップしている際に、前記物体と前記自車線とのラップ率である自車線ラップ率に基づき判定されたものと、判定部34の先行車ラップ率算出部15において、前記自車両と先行車両とのラップ率である先行車ラップ率に基づき判定されたものとがある。変更部37は、判定部34からの自車線ラップ率に基づき警報の出力時期を変更する第1変更部38と、判定部34からの先行車ラップ率に基づき警報の出力時期を変更する第2変更部39とを備える。
追突警報設定部18は、同一の物体(先行車両、対向車両)について、第2変更部39において先行車ラップ率に基づき算出された追突警報PREの出力タイミングと、第1変更部38において自車線ラップ率に基づき算出された追突警報PREの出力タイミングとの両方がある場合には、これらのうちで警報の出力タイミングが早い方を出力時期に選択する選択部として機能する。すなわち複数の追突警報PREの出力タイミングが算出された場合には、より危険度の高い方の出力タイミングを優先する。以上により、運転者に対する警報を適切に実施しつつ、不要な警報の出力を抑制する。
車両制御部19は、自車両と先行車両等との相対位置及び相対速度等に基づいて衝突余裕時間TTC(Time to collision)を算出する。そしてTTCが、追突警報設定部18で設定した追突警報PREの出力タイミングとなる際に、警報装置40に作動指令を出力する。これにより警報装置40から警報が出力される。なおTTCは、自車両と先行車両等との相対加速度を加味して算出されてもよい。
次に、上記構成のECU10の演算処理の一例を、図10~図13を参照しつつ説明する。図10は、先行車ラップ率の算出処理のフローチャートである。図11は、自車線ラップ率の算出処理のフローチャートである。図12は、追突警報PREの出力タイミングの演算処理のフローチャートである。図13は、本実施形態のPCS制御における警報の出力処理のフローチャートである。なおこれらの各処理は、ECU10が所定周期で繰り返し実施する。
図10において、ECU10は、ステップS11において、自車両の情報を取得する。例えば、自車両の情報として、車速、操舵角、加速情報及び減速情報などを取得する。
次に、ECU10は、ステップS12において、先行車両等の物体の情報を取得する。本実施形態では、FSN物標等から物体の相対距離、相対速度、相対横位置および車幅等の情報を取得する。次にECU10は、ステップS13において、物体が車両であるか否かを判定する。本処理は、車両判定部31により、撮像装置22の撮影画像に対して、テンプレートマッチング等の周知の画像処理を行うことにより、撮像範囲内に存在する所定の物体の種類(他車両、歩行者、路上障害物等)を検出し、その検出結果に基づき判定する。
ECU10は、ステップS13を肯定した場合には、ステップS14において、他車両(つまり先行車両)が自車両とオーバーラップしているか否かを判定する。本処理は、自車両の横位置と他車両の横位置との位置関係から判定できる。ECU10は、ステップS14で他車両が自車両とオーバーラップしていると判定した場合には、ステップS15~S19で、先行車ラップ率を算出する。
まず、ECU10は、ステップS15において、自車両の車幅よりも先行車両の車幅が小さいか否かを判定する。自車両の車幅よりも先行車両の車幅が小さいか否かは、フュージョン物標FSN等から取得される物体の横位置や横幅の検出結果に基づき判定する。ECU10は、ステップS15で肯定した場合には、ステップS16において、自車両に対する先行車両の左右方向の回避余裕幅を算出する。なお回避余裕幅は、自車両の左右の横位置と、先行車両の左右の横位置とをそれぞれ比較し、その差分を算出することで取得できる。次に、ECU10は、ステップS17において、左右の回避余裕幅のうちで大きい方を用いて先行車ラップ率を算出する。
ECU10は、ステップS15で否定した場合には、ステップS18において、自車両に対して先行車両がオフセットしているか否かを判定する。オフセットしているか否かについても、フュージョン物標FSN等から取得される物体の横位置の検出結果に基づき判定できる。ECU10は、ステップS18においてオフセットしていると判定した場合にもステップS16に進み、回避余裕幅を算出する。この場合、自車両に対して先行車両がオフセットしている側の回避余裕幅を算出する。そしてECU10は、ステップS17において、回避余裕幅を用いて先行車ラップ率を算出する。
ECU10は、ステップS18で否定した場合には、ステップS19に進み、先行車両に対して自車両がフルラップ(ラップ率が100%)であるか否かを判定する。ECU10は、ステップS19において、先行車両に対して自車両がフルラップであると判定した場合には、ステップS17に進み先行車ラップ率を100%に設定する。なおS13,S14で否定した場合には処理を終了する。
次に、図11を用いて自車線ラップ率の演算処理を説明する。
まず、ECU10は、ステップS31において、自車両の情報を取得する。例えば、自車両の情報として、車速、操舵角、加速情報及び減速情報などを取得する。次に、ECU10は、ステップS32において、先行車両等の物体の情報を取得する。本実施形態では、FSN物標等により物体の相対距離、相対速度、相対横位置および車幅等の情報を取得する。
次にECU10は、ステップS33において、物体が車両であるか否かを判定する。本処理は、車両判定部31により、撮像装置22の撮影画像に対して、テンプレートマッチング等の周知の画像処理を行うことにより、撮像範囲内に存在する所定の物体の種類(他車両、歩行者、路上障害物等)を検出し、その検出結果に基づき判定する。
ECU10は、ステップS33を肯定した場合には、ステップS34において、その車両(他車両)が自車線の白線にオーバーラップしているか否かを判定する。本処理は、他車両の横位置と白線の位置を比較することにより判定できる。
ECU10は、ステップS34で肯定した場合には、ステップS35において、他車両が停止状態であるか否かを判定する。本処理は当該車両の横移動速度がゼロの際に肯定する。処理の流れは、他車両が停止状態の場合にはステップS36に進む。
ECU10は、ステップS35で他車両が停止状態ではないと判定した場合には、ステップS37において、他車両が自車両から離間しているか否かを判定する。ステップS37で否定した場合には処理を終了する。ECU10は、ステップS37で肯定した場合には、ステップS36において、他車両において、白線よりも自車線側の幅を、自車線ラップ率として取得する。なおS33,S34で否定した場合には処理を終了する。
次に図12を用いて追突警報PREの出力タイミングの演算処理について説明する。本処理は、自車両前方の車両ごとに実施される。
まず、ECU10は、ステップS41において、先行車ラップ率及び自車線ラップ率の両方が取得されているか否かを判定する。肯定した場合には、ECU10は、ステップS42において、先行車ラップ率から求めた係数α1を用いて算出した推定モデルを用いて、追突警報PREの出力タイミングTPRE=Taを算出する。またECU10は、ステップS43において、自車線ラップ率から求めた係数α2を用いて算出した推定モデルを用いて、追突警報PREの出力タイミングTPRE=Tbを算出する。次にECU10は、ステップS44において、出力タイミングTa>Tbであるか否か、すなわち出力タイミングTaよりも出力タイミングTbが早いか否かを判定する。ステップS44を肯定した場合には、ECU10は、ステップS45において、出力タイミングTbを追突警報PREの出力時期に設定する。ステップS44を否定した場合には、ECU10は、ステップS46において、出力タイミングTaを追突警報PREの出力時期に設定する。
ステップS41で否定した場合には、ECU10は、ステップS47において、先行車ラップ率のみを取得したか否かを判定する。ステップS47を肯定した場合には、ECU10は、ステップS48において、先行車ラップ率から算出した係数α1を用いて求めた推定モデルを用いて、追突警報PREの出力タイミングTaを算出する。そして、ECU10は、ステップS49において、出力タイミングTaを、追突警報PREの出力時期に設定する。
ステップS47を否定した場合には、ECU10は、ステップS50において、自車線ラップ率のみを取得したか否かを判定する。ステップS50を肯定した場合には、ECU10は、ステップS51において、自車線ラップ率から算出した係数α2を用いて求めた推定モデルを用いて、追突警報PREの出力タイミングTbを算出する。そして、ECU10は、ステップS52において、出力タイミングTbを追突警報PREの出力時期に設定する。
ステップS50を否定した場合には、ECU10は、ステップS53において、適合により決定されるα(初期値)を用いて算出した推定モデルを用いて算出された出力タイミングTPRE=T0を、追突警報PREの出力時期に設定する。
次に図13を用いて、ECU10が実施する警報出力処理について説明する。
まず、ECU10は、ステップS61において、物体(先行車両等)に対する自車両の衝突余裕時間TTC(Time to collision)を算出する。例えばTTCは、自車両と先行車両との相対距離及び相対速度に基づいて算出されたものであってもよいし、相対加速度を加味して算出されたものであってもよい。
次にECU10は、ステップS62において、ステップS61で算出したTTCが、追突警報PREの出力タイミングTPREであるか否かを判定する.ステップS62で否定した場合には処理を終了する。ステップS62で肯定した場合には、ECU10は、ステップS63において、追突警報PREを出力する。
本発明によれば以下の効果を奏することができる。
(A1)自車両前方の所定距離に存在する物体(先行車両等)に対して自車両の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出する。そして算出された回避操作のタイミングの分布に基づいて、その回避操作と運転者の実際の回避操作とが干渉しないように運転者に対する警報の出力時期を設定する。これにより、運転者に関する統計的データを考慮して、ことで、不要な警報の出力を抑制できる。
しかし、自車両と物体との衝突の危険性が低い状況においては、運転者が自車両前方の物体に気が付いた状態で、意図的に回避操作を遅めにすることが考えられる。そのため、運転者の回避操作のタイミングの分布に基づき設定されたタイミングで警報が出力されると、運転者の回避操作と警報とが干渉するおそれがあり、運転者の不快感を招くことに繋がる。
そこで、自車両前方の物体の位置に基づいて、自車両との衝突の危険性を判定する。そして、その判定結果に基づいて、回避操作のタイミングの分布に基づき設定された警報の出力時期を変更するようにした。この場合、運転者の回避操作との干渉を抑えつつ、運転者に対する不要な警報の出力を抑制することができる。
(A2)物体が自車線上にオーバーラップしている場合には、物体と自車線とのラップ率である自車線ラップ率に応じて自車両の衝突の危険性が変わる。そこで、自車線ラップ率に基づいて警報の出力時期を変更するようにしたため、自車線ラップ率を考慮して、運転者の回避操作との干渉を抑えつつ、不要な警報の出力を抑えることができる。
(A3)自車線上の物体が白線を超えて他車線に移動する場合など、自車線ラップ率が小さくなる場合には、自車両が物体に衝突する危険性が低くなるため、運転者が自車両前方の物体に気が付いた状態で、意図的に回避操作を遅めにすることが考えられる。そこで、自車線ラップ率が小さいほど警報の出力時間が遅延側に設定されるようにしたため、自車両の衝突可能性に応じて、不要な警報を抑制する効果を高めることができる。
(A4)自車線に物体がオーバーラップしている場合において、物体が自車両から離間する方向に横移動している場合には、自車両と物体との衝突の危険性が低下するため、運転者が自車両前方の物体に気が付いた状態で、意図的に回避操作を遅めにすることが考えられる。このことを条件として、自車線ラップ率に応じて警報の出力時期を遅延側に変更するようにしたため、自車両に対する物体の接近状態を考慮して、運転者に対する不要な警報の出力を抑制することができる。
(A5)自車線において自車両と先行車両とがオーバーラップしている場合には、自車両と先行車両とのラップ率である先行車ラップ率に応じて自車両の衝突の危険性が変わる。そこで、先行車ラップ率に基づいて警報の出力時期を変更するようにしたため、自車両と先行車両とのラップ率に応じて、運転者の回避操作との干渉を抑えつつ、運転者に対する不要な警報の出力を抑えることができる。
(A6)先行車ラップ率が小さくなるほど、運転者が操舵回避を遅めに行う可能性が高くなる。そこで、先行車ラップ率が小さいほど警報の出力時期を遅延側となるように変更することで、不要な警報出力を抑制する効果を高めることができる。
(A7)物体が自車線にラップしていると共に、物体が自車両ともラップしている場合には、自車線ラップ率及び先行車ラップ率の各々に基づき警報の出力時期が変更されることとなる。この場合、警報の出力タイミングが早い方を前記出力時期に選択するようにしたため、運転者に対する警報を適切に行いつつ、不要な警報の出力を抑制することができる。
(A8)物体の横位置に基づいて衝突の危険性を判定する場合には、物体の横位置の算出精度が高いことが好ましい。そこで、自車両の予測進路の曲率(推定カーブ)を推定し、当該曲率に基づいて、物体の横位置の各々を補正し、補正後の横位置を用いて衝突の危険性を判定するようにした。この場合、物体との衝突の危険性をより精度よく判定することができるようになる。
(A9)曲率が所定の閾値よりも大きくなる自車両の直進状態の際には、横位置の補正を実施しないこととしたため、演算負荷の軽減を図りつつ、警報の出力時期を適切に設定できる。
(A10)自車両の運転車が回避する対象を車両に限定することで、自車線上のその他の物体に対する不要な警報が出力されることを抑制できる。
(変形例)
本発明は上記実施形態に限定されず次のように実施してもよい。なお以下の説明において上記と同様の構成については同じ図番号を付し詳述を省略する。
本発明は上記実施形態に限定されず次のように実施してもよい。なお以下の説明において上記と同様の構成については同じ図番号を付し詳述を省略する。
(M1)上記実施形態では、先行車両等がFSN物標として検出されていることを前提として、衝突回避制御を行っている。これ以外にも、先行車両がレーダ21又は撮像装置22のいずれか一方のみで検出されている場合にも、レーダ21で検出したレーダ物標LT、又は撮像装置22で検出した画像物標GTのいずれかの情報を用いて、上記の処理を実施してもよい。
(M2)上記実施形態では、先行車両と白線とがオーバーラップしており、かつ先行車両が自車両から離反した方向に移動することを条件として、追突警報PREの出力タイミングを変更するようにしたが、先行車両が自車線にオーバーラップしていることのみを条件として、追突警報PREの出力タイミングを変更してもよい。
(M3)上記実施形態では、レーダ21と撮像装置22との複数の物体検出装置を用いて、自車両前方にある物体を特定するようにしているが、レーダ21及び撮像装置22の少なくとも一方が設けられていればよい。
(M4)上記実施形態では、先行車ラップ率又は自車線ラップ率に基づき、式(1)の係数αを変更する例を示した。これ以外にも、先行車ラップ率や自車線ラップ率に基づき、式(1)の他の係数(例えばβ等)を変更することで、衝突の危険性に応じて推定モデルを変更するものであってもよい。
(M5)上記実施形態では運転者の回避操作としてブレーキを踏むタイミングをモニタリングすることで、運転者の回避操作のモデルを求める例を示した。これ以外にも、運転者の回避操作としてステアリング操作が行われるタイミングをモニタリングすることで、運転者の回避操作のモデルが求められてもよい。
(M6)上記実施形態では、運転者による回避操作の頻度の分布を定式化している。これ以外にも、運転者による回避操作の頻度の分布をマップ等で表すようにしてもよい。この場合には、当該マップを用いて、運転者の回避操作のタイミングと、追突警報PREとが干渉しないように、追突警報PREの出力タイミングTPREが設定されることとなる。
Claims (12)
- 自車両前方の所定距離に存在する物体(M2,M3)に対して自車両(M1)の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出する分布算出部(35)と、
前記回避操作のタイミングの分布に基づいて、その回避操作と前記運転者の実際の操作とが干渉しないように前記運転者に対する警報の出力時期を設定する警報出力設定部(36)と、
前記自車両前方の物体の位置に基づいて、自車両の衝突の危険性を判定する判定部(34)と、
前記自車両の衝突の危険性に基づいて、前記警報出力設定部で設定された警報の出力時期を変更する変更部(37)と、
を備えることを特徴とする車両制御装置(10)。 - 前記判定部(34)は、前記自車両が走行する自車線に前記物体がオーバーラップしている際に、前記物体と前記自車線とのラップ率である自車線ラップ率に基づき前記衝突の危険性を判定するものであって、
前記変更部(37)は、前記自車線ラップ率に基づいて前記警報の出力時期を変更する請求項1に記載の車両制御装置(10)。 - 前記変更部(37)は、前記自車線ラップ率が小さいほど前記警報の出力時期を遅延側に変更する請求項2に記載の車両制御装置(10)。
- 前記自車線に前記物体がオーバーラップしている場合において、前記自車線に直交する横方向において前記物体が前記自車両に接近しているか離間しているかを判定する移動状態判定部(33)を備え、
前記変更部(37)は、前記物体が前記自車両に接近していると判定されたことを条件に、前記自車線ラップ率に応じて前記警報の出力時期を遅延側に変更する請求項2又は3に記載の車両制御装置(10)。 - 前記判定部(34)は、前記自車両と先行車両とのラップ率である先行車ラップ率に基づき前記衝突の危険性を判定するものであって、
前記変更部(37)は、前記先行車ラップ率に基づいて前記警報の出力時期を変更する請求項1乃至4のいずれか1項に記載の車両制御装置(10)。 - 前記変更部(37)は、前記先行車ラップ率が小さいほど前記警報の出力時期を遅延側となるように変更する請求項5に記載の車両制御装置(10)。
- 前記判定部(34)は、前記自車両が走行する自車線に前記物体がオーバーラップしている際に、前記物体と前記自車線とのラップ率である自車線ラップ率に基づき前記衝突の危険性を判定する第1判定部(16)と、前記自車両と先行車両とのラップ率である先行車ラップ率に基づき前記衝突の危険性を判定する第2判定部(15)とを備え、
前記変更部は、前記自車線ラップ率に基づき警報の出力時期を変更する第1変更部(38)と、前記先行車ラップ率に基づき警報の出力時期を変更する第2変更部(39)とを備え、
前記第1変更部及び前記第2変更部により変更された前記警報の出力時期のうち警報のタイミングが早い方を前記出力時期に選択する選択部(18)手段を備える請求項1乃至6のいずれか1項に記載の車両制御装置(10)。 - 前記判定部は、前記自車両に対する前記物体の横位置に基づいて前記衝突の危険性を判定するものであって、
自車両の予測進路の曲率から、その逆数であるカーブ半径を推定する予測進路推定部(32)と、
前記予測進路推定部が推定したカーブ半径に基づいて、前記物体の横位置を補正する横位置補正部(14)と、備える請求項1乃至7のいずれか1項に記載の車両制御装置(10)。 - 前記横位置補正部(14)は、前記曲率が所定の閾値よりも大きくなる自車両の直進状態の際には、前記横位置の補正を実施しない請求項8に記載の車両制御装置(10)。
- 前記自車両の物体が車両であるか否かを判定する車両判定部(31)を備え、
前記変更部は、前記物体が車両であることを条件に、前記警報の出力時期を変更する請求項1乃至9のいずれか1項に記載の車両制御装置(10)。 - 前記回避操作は、運転者によるブレーキ操作又はステアリング操作である請求項1乃至10のいずれか1項に記載の車両制御装置(10)。
- 自車両前方の所定距離に存在する物体(M2,M3)に対して自車両(M1)の運転者が行った回避操作のタイミングの履歴を蓄積して、回避操作のタイミングの分布を算出するステップと、
前記回避操作のタイミングの分布に基づいて、その回避操作と前記運転者の実際の操作とが干渉しないように前記運転者に対する警報の出力時期を設定するステップと、
前記自車両前方の物体の位置に基づいて、自車両の衝突の危険性を判定するステップと、
前記自車両の衝突の危険性に基づいて、警報の出力時期を変更するステップと、を備えることを特徴とする車両制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US15/578,662 US10625739B2 (en) | 2015-06-02 | 2016-05-31 | Vehicle control apparatus and vehicle control method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015112613A JP6363558B2 (ja) | 2015-06-02 | 2015-06-02 | 車両制御装置、及び車両制御方法 |
| JP2015-112613 | 2015-06-02 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016194900A1 true WO2016194900A1 (ja) | 2016-12-08 |
Family
ID=57441296
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/066020 WO2016194900A1 (ja) | 2015-06-02 | 2016-05-31 | 車両制御装置、及び車両制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10625739B2 (ja) |
| JP (1) | JP6363558B2 (ja) |
| WO (1) | WO2016194900A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019043195A (ja) * | 2017-08-30 | 2019-03-22 | マツダ株式会社 | 車両制御装置 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9919648B1 (en) * | 2016-09-27 | 2018-03-20 | Robert D. Pedersen | Motor vehicle artificial intelligence expert system dangerous driving warning and control system and method |
| DE112017007636T5 (de) * | 2017-06-12 | 2020-09-24 | Continental Automotive Gmbh | Heckseitiges Pre-Crash-Sicherheitssystem |
| JP7067175B2 (ja) * | 2018-03-23 | 2022-05-16 | 株式会社デンソー | 運転支援装置、運転支援方法、およびコンピュータプログラム |
| KR102077201B1 (ko) * | 2018-07-20 | 2020-02-13 | 현대모비스 주식회사 | 차량의 통합 제어 장치 및 방법 |
| US11059479B2 (en) | 2018-10-08 | 2021-07-13 | Mando Corporation | Collision avoidance apparatus and collision avoidance method |
| KR101964858B1 (ko) * | 2018-10-08 | 2019-08-13 | 주식회사 만도 | 충돌 방지 장치 및 충돌 방지 방법 |
| CN109583434B (zh) * | 2019-01-18 | 2021-04-23 | 浙江吉利汽车研究院有限公司 | 一种车辆重叠度获取方法及装置 |
| JP7283130B2 (ja) * | 2019-02-28 | 2023-05-30 | トヨタ自動車株式会社 | フォースリミッタ制御システム |
| US11858502B2 (en) * | 2019-06-21 | 2024-01-02 | Hitachi Astemo, Ltd. | Vehicle control device |
| JP7172925B2 (ja) * | 2019-09-13 | 2022-11-16 | いすゞ自動車株式会社 | 運転支援装置 |
| US10981507B1 (en) * | 2019-11-07 | 2021-04-20 | Focused Technology Solutions, Inc. | Interactive safety system for vehicles |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007008300A (ja) * | 2005-06-30 | 2007-01-18 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2011197915A (ja) * | 2010-03-18 | 2011-10-06 | Toyota Motor Corp | 追突警報装置および追突警報方法 |
| JP2012008696A (ja) * | 2010-06-23 | 2012-01-12 | Toyota Motor Corp | 車両支援装置 |
| JP2013173404A (ja) * | 2012-02-23 | 2013-09-05 | Toyota Motor Corp | 衝突被害軽減システム、装置制御装置、衝突被害低減方法 |
| JP2015207164A (ja) * | 2014-04-21 | 2015-11-19 | 株式会社デンソー | 走行支援装置 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4578795B2 (ja) * | 2003-03-26 | 2010-11-10 | 富士通テン株式会社 | 車両制御装置、車両制御方法および車両制御プログラム |
| US7206697B2 (en) * | 2003-10-14 | 2007-04-17 | Delphi Technologies, Inc. | Driver adaptive collision warning system |
| US7302339B2 (en) * | 2003-07-21 | 2007-11-27 | Justin Gray | Hazard countermeasure system and method for vehicles |
| US20070078600A1 (en) * | 2005-09-20 | 2007-04-05 | Honeywell International Inc. | System and method of collision avoidance using an invarient set based on vehicle states and dynamic characteristics |
| JP4893118B2 (ja) * | 2006-06-13 | 2012-03-07 | 日産自動車株式会社 | 回避制御装置、この回避制御装置を備える車両および回避制御方法 |
| JP4254844B2 (ja) * | 2006-11-01 | 2009-04-15 | トヨタ自動車株式会社 | 走行制御計画評価装置 |
| EP2356640A4 (en) * | 2008-11-13 | 2012-11-14 | Aser Rich Ltd | SYSTEM AND METHOD FOR IMPROVING VEHICLE SAFETY BY BETTER SENSITIZATION TO THE DRIVER SITUATION OF A VEHICLE |
| US20100209890A1 (en) * | 2009-02-18 | 2010-08-19 | Gm Global Technology Operations, Inc. | Vehicle stability enhancement control adaptation to driving skill with integrated driving skill recognition |
| DE112010005654T5 (de) * | 2010-06-08 | 2013-05-29 | Toyota Jidosha Kabushiki Kaisha | Fahrmodell-Erzeugungsvorrichtung und Fahrunterstützungsvorrichtung |
| EP2728563A4 (en) * | 2011-06-13 | 2015-03-04 | Toyota Motor Co Ltd | DRIVER ASSISTING DEVICE AND DRIVER ASSISTING METHOD |
| TWI455073B (zh) * | 2011-12-14 | 2014-10-01 | Ind Tech Res Inst | 車用特定路況警示裝置、系統與方法 |
| US9129519B2 (en) * | 2012-07-30 | 2015-09-08 | Massachussetts Institute Of Technology | System and method for providing driver behavior classification at intersections and validation on large naturalistic data sets |
| WO2014064831A1 (ja) * | 2012-10-26 | 2014-05-01 | トヨタ自動車 株式会社 | 運転支援装置及び運転支援方法 |
| KR101480610B1 (ko) * | 2013-05-21 | 2015-01-08 | 현대자동차주식회사 | 차량의 충돌 방지 장치 및 그 방법 |
| KR101519287B1 (ko) * | 2014-02-14 | 2015-05-11 | 현대자동차주식회사 | 차량 충돌 방지 장치 및 그 방법 |
| US9214086B1 (en) * | 2014-05-30 | 2015-12-15 | Alpine Electronics, Inc. | Vehicle to vehicle wireless communication apparatus with potential crash warning |
| EP3239957A4 (en) * | 2014-12-26 | 2018-08-15 | The Yokohama Rubber Co., Ltd. | Collision avoidance system |
-
2015
- 2015-06-02 JP JP2015112613A patent/JP6363558B2/ja active Active
-
2016
- 2016-05-31 WO PCT/JP2016/066020 patent/WO2016194900A1/ja active Application Filing
- 2016-05-31 US US15/578,662 patent/US10625739B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007008300A (ja) * | 2005-06-30 | 2007-01-18 | Nissan Motor Co Ltd | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP2011197915A (ja) * | 2010-03-18 | 2011-10-06 | Toyota Motor Corp | 追突警報装置および追突警報方法 |
| JP2012008696A (ja) * | 2010-06-23 | 2012-01-12 | Toyota Motor Corp | 車両支援装置 |
| JP2013173404A (ja) * | 2012-02-23 | 2013-09-05 | Toyota Motor Corp | 衝突被害軽減システム、装置制御装置、衝突被害低減方法 |
| JP2015207164A (ja) * | 2014-04-21 | 2015-11-19 | 株式会社デンソー | 走行支援装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019043195A (ja) * | 2017-08-30 | 2019-03-22 | マツダ株式会社 | 車両制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6363558B2 (ja) | 2018-07-25 |
| US10625739B2 (en) | 2020-04-21 |
| US20180154892A1 (en) | 2018-06-07 |
| JP2016224825A (ja) | 2016-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016194900A1 (ja) | 車両制御装置、及び車両制御方法 | |
| CN107408345B (zh) | 物标存在判定方法以及装置 | |
| US8175797B2 (en) | Vehicle drive assist system | |
| CN108541325B (zh) | 驾驶辅助装置以及驾驶辅助方法 | |
| US10672275B2 (en) | Vehicle control device and vehicle control method | |
| EP2803547B1 (en) | Collision mitigation apparatus | |
| US9819927B2 (en) | Image processing device, image processing method, and device control system | |
| WO2018074287A1 (ja) | 車両制御装置 | |
| US9470790B2 (en) | Collision determination device and collision determination method | |
| JP6787157B2 (ja) | 車両制御装置 | |
| JP6491596B2 (ja) | 車両制御装置及び車両制御方法 | |
| WO2017104773A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| US20120226423A1 (en) | Vehicle driving support apparatus | |
| WO2017111135A1 (ja) | 走行支援装置及び走行支援方法 | |
| WO2017065212A1 (ja) | 車両制御装置及び車両制御方法 | |
| JP2019114030A (ja) | 衝突判定装置 | |
| WO2016186171A1 (ja) | 物体検出装置、及び物体検出方法 | |
| WO2016158634A1 (ja) | 車両制御装置及び車両制御方法 | |
| JP7054327B2 (ja) | 走行支援装置 | |
| WO2019012995A1 (ja) | 走行支援装置 | |
| JP2017068461A (ja) | 車両の運転支援装置 | |
| JP2020097346A (ja) | 車両の走行制御装置 | |
| JP6432538B2 (ja) | 衝突予測装置 | |
| JP2017194926A (ja) | 車両制御装置、車両制御方法 | |
| JP2012164275A (ja) | 画像認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16803334 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15578662 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16803334 Country of ref document: EP Kind code of ref document: A1 |