JP2017194926A - 車両制御装置、車両制御方法 - Google Patents
車両制御装置、車両制御方法 Download PDFInfo
- Publication number
- JP2017194926A JP2017194926A JP2016086409A JP2016086409A JP2017194926A JP 2017194926 A JP2017194926 A JP 2017194926A JP 2016086409 A JP2016086409 A JP 2016086409A JP 2016086409 A JP2016086409 A JP 2016086409A JP 2017194926 A JP2017194926 A JP 2017194926A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- collision avoidance
- target
- moving direction
- difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K31/00—Vehicle fittings, acting on a single sub-unit only, for automatically controlling vehicle speed, i.e. preventing speed from exceeding an arbitrarily established velocity or maintaining speed at a particular velocity, as selected by the vehicle operator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/86—Combinations of radar systems with non-radar systems, e.g. sonar, direction finder
- G01S13/867—Combination of radar systems with cameras
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
- G06V20/58—Recognition of moving objects or obstacles, e.g. vehicles or pedestrians; Recognition of traffic objects, e.g. traffic signs, traffic lights or roads
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2201/00—Particular use of vehicle brake systems; Special systems using also the brakes; Special software modules within the brake system controller
- B60T2201/02—Active or adaptive cruise control system; Distance control
- B60T2201/022—Collision avoidance systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2720/00—Output or target parameters relating to overall vehicle dynamics
- B60W2720/10—Longitudinal speed
- B60W2720/106—Longitudinal acceleration
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/86—Combinations of lidar systems with systems other than lidar, radar or sonar, e.g. with direction finders
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9325—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles for inter-vehicle distance regulation, e.g. navigating in platoons
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Mechanical Engineering (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- Computer Networks & Wireless Communication (AREA)
- Multimedia (AREA)
- Theoretical Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
Abstract
【解決手段】画像に基づいて、車両において車両進行方向に対して横方向に異なる少なくとも2つの所定点の位置を取得する位置取得部21と、所定点の位置の履歴から求められた物体の移動軌跡に基づいて、物体に対する衝突回避制御を実施する制御部22と、所定点ごとに、それら各所定点の位置の履歴に基づいて当該各所定点の移動方向を算出する算出部23と、各所定点における移動方向の差に基づいて、衝突回避制御の実施態様を変更する変更部24と、を備える。
【選択図】 図1
Description
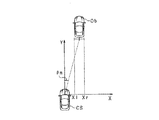
図1は、車両制御装置、及び車両制御方法を適用したプリクラッシュセーフティシステム(以下、PCSS:Pre-crash safety systemと記載する。)100を示している。PCSS100は、例えば、車両に搭載される車両システムの一例であり、前方に位置する物体を検出し、検出した物体と車両とが衝突する恐れがある場合、物体に対する自車両の衝突の回避動作、又は衝突の緩和動作を実施する。以下では、このPCSS100が搭載された車両を自車両CSと記載し、検出対象となる物体を物標Obと記載する。
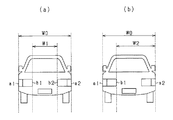
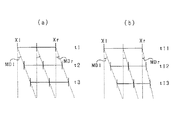
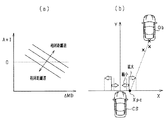
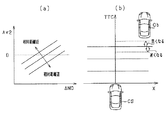
ΔMD=|MDr−MDl| … (1)
ここで、MDrは、右端点Xrに基づいて算出された移動方向MDであり、MDlは左端点Xlに基づいて算出された移動方向MDである。
この第2実施形態では、運転支援ECU20は、移動方向の差ΔMDと自車両CSを基準とする物標Obの相対速度Vrとに基づいて、PCSの実施態様を変更する。ここで、自車両CSを基準とする相対速度Vrとは、物標Obの相対速度Vrから自車速度Vsを引いた値を意味する。また、この実施形態では、自車両CSに対して物標Obが近づく方をプラスとし、自車両CSに対して物標Obが遠ざかる方をマイナスとしている。
この第3実施形態では、運転支援ECU20は、PCSの実施態様を変更する場合、その動作を作動させ易くする場合と動作を作動させ難くする場合とで異なる変化度合とする。
運転支援ECU20は、物体の所定点として、横位置とこの横位置の中心の点との3点におけるそれぞれの移動方向MDを算出し、各移動方向の差ΔMDを算出するものであってもよい。上記構成により、3点を用いて移動方向の差ΔMDをより精度良く取得することができる。
Claims (8)
- 撮像手段(32)により撮像された画像に基づいて車両の前方に存在する物体を検出する車両制御装置であって、
前記画像に基づいて、前記物体において車両進行方向に対して横方向に異なる少なくとも2つの所定点の位置を取得する位置取得部(21)と、
前記所定点の位置の履歴から求められた前記物体の移動軌跡に基づいて、前記物体との衝突を回避するための衝突回避制御を実施する制御部(22)と、
前記所定点ごとに、それら各所定点の位置の履歴に基づいて当該各所定点の移動方向を算出する算出部(23)と、
前記各所定点における前記移動方向の差に基づいて、前記制御部が実施する前記衝突回避制御の実施態様を変更する変更部(24)と、を備える車両制御装置。 - 前記算出部は、前記移動方向として、前記車両進行方向を基準とする前記各所定点の時系列での変化の傾きを算出し、
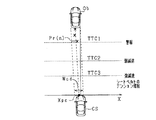
前記変更部は、前記移動方向の差として、前記時系列での変化の傾きの差を算出する、請求項1に記載の車両制御装置。 - 前記制御部は、前記物体の移動軌跡に基づいて前記物体から前記車両までの距離がゼロになったと仮定した状態での当該物体の前記横方向での位置を衝突横位置として算出し、算出した前記衝突横位置が前記車両の前方に設定された判定領域に位置する場合に前記衝突回避制御を実施し、
前記変更部は、前記移動方向の差に基づいて前記判定領域の領域幅を前記横方向に変更することで、前記衝突回避制御の実施態様を変更する、請求項1又は請求項2に記載の車両制御装置。 - 前記車両から前記物体までの距離を取得する距離取得部を有し、
前記変更部は、前記衝突回避制御の実施態様の変更に際し、前記衝突回避制御を前記距離が遠い程実施し難くする、請求項1から請求項3のいずれか一項に記載の車両制御装置。 - 前記車両を基準とする前記物体の相対速度を取得する相対速度取得部を有し、
前記変更部は、前記衝突回避制御の実施態様の変更に際し、前記衝突回避制御を前記相対速度が小さい程実施し難くする、請求項1から請求項3のいずれか一項に記載の車両制御装置。 - 前記変更部は、前記判定領域を、前記横方向に拡大する場合に縮小する場合と比べて変更し難くする、請求項3に記載の車両制御装置。
- 前記変更部は、前記衝突回避制御における動作の作動時期を、前記移動方向の差に基づいて変更することで、前記実施態様を変更する、請求項1から請求項6のいずれか一項に記載の車両制御装置。
- 撮像手段により撮像された画像に基づいて自車両の前方に存在する物体を検出する車両制御方法であって、
前記画像に基づいて、前記物体において車両進行方向に対して横方向に異なる少なくとも2つの所定点の位置を取得する位置取得工程と、
前記所定点の位置の履歴から求められた前記物体の移動軌跡に基づいて、前記物体との衝突を回避するための衝突回避制御を実施する制御工程と、
前記所定点ごとに、それら各所定点の位置の履歴に基づいて当該各所定点の移動方向を算出する算出工程と、
前記各所定点における移動方向の差に基づいて、前記制御工程で実施する前記衝突回避制御の実施態様を変更する変更工程と、を備える車両制御方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086409A JP2017194926A (ja) | 2016-04-22 | 2016-04-22 | 車両制御装置、車両制御方法 |
| US16/095,111 US11288961B2 (en) | 2016-04-22 | 2017-04-19 | Vehicle control apparatus and vehicle control method |
| PCT/JP2017/015779 WO2017183668A1 (ja) | 2016-04-22 | 2017-04-19 | 車両制御装置、車両制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016086409A JP2017194926A (ja) | 2016-04-22 | 2016-04-22 | 車両制御装置、車両制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017194926A true JP2017194926A (ja) | 2017-10-26 |
| JP2017194926A5 JP2017194926A5 (ja) | 2018-07-26 |
Family
ID=60116112
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016086409A Pending JP2017194926A (ja) | 2016-04-22 | 2016-04-22 | 車両制御装置、車両制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11288961B2 (ja) |
| JP (1) | JP2017194926A (ja) |
| WO (1) | WO2017183668A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109087485A (zh) * | 2018-08-30 | 2018-12-25 | Oppo广东移动通信有限公司 | 驾驶提醒方法、装置、智能眼镜及存储介质 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6564424B2 (ja) * | 2017-06-09 | 2019-08-21 | 株式会社Subaru | 車両制御装置 |
| JP6988200B2 (ja) * | 2017-06-29 | 2022-01-05 | 株式会社デンソー | 車両制御装置 |
| JP7380449B2 (ja) * | 2020-06-30 | 2023-11-15 | トヨタ自動車株式会社 | 判定装置及びプログラム |
| CN113954867B (zh) * | 2021-09-29 | 2023-10-20 | 广州文远知行科技有限公司 | 一种对象至碰时间快速计算方法、装置、设备及存储介质 |
| JP2024067217A (ja) * | 2022-11-04 | 2024-05-17 | トヨタ自動車株式会社 | 衝突被害軽減装置 |
| KR20240125214A (ko) * | 2023-02-10 | 2024-08-19 | 현대자동차주식회사 | 충돌을 회피하기 위한 차량 및 차량의 작동 방법 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088516A1 (ja) * | 2011-12-13 | 2013-06-20 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2014067169A (ja) * | 2012-09-25 | 2014-04-17 | Toyota Motor Corp | 衝突予測装置 |
| JP2014106901A (ja) * | 2012-11-29 | 2014-06-09 | Aisin Seiki Co Ltd | 距離算出装置、衝突検出システム、距離算出方法、衝突検出方法、及びプログラム |
| JP2014213776A (ja) * | 2013-04-26 | 2014-11-17 | 株式会社デンソー | 衝突判定装置、および衝突緩和装置 |
| WO2014192137A1 (ja) * | 2013-05-31 | 2014-12-04 | トヨタ自動車株式会社 | 移動軌跡予測装置及び移動軌跡予測方法 |
| WO2016047495A1 (ja) * | 2014-09-24 | 2016-03-31 | 株式会社デンソー | 物体検出装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4849013B2 (ja) | 2007-06-14 | 2011-12-28 | トヨタ自動車株式会社 | 車両周辺監視装置 |
| JP2010152839A (ja) | 2008-12-26 | 2010-07-08 | Mitsubishi Electric Corp | 車両周辺監視装置 |
| JP4858574B2 (ja) * | 2009-05-19 | 2012-01-18 | トヨタ自動車株式会社 | 物体検出装置 |
| CN105122330B (zh) * | 2013-04-25 | 2017-08-15 | 丰田自动车株式会社 | 驾驶辅助装置和驾驶辅助方法 |
| US10210399B2 (en) * | 2013-12-20 | 2019-02-19 | Magna Electronics Inc. | Vehicle vision system with image processing |
| JP2015132553A (ja) | 2014-01-14 | 2015-07-23 | トヨタ自動車株式会社 | 物体検出装置 |
-
2016
- 2016-04-22 JP JP2016086409A patent/JP2017194926A/ja active Pending
-
2017
- 2017-04-19 WO PCT/JP2017/015779 patent/WO2017183668A1/ja not_active Ceased
- 2017-04-19 US US16/095,111 patent/US11288961B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013088516A1 (ja) * | 2011-12-13 | 2013-06-20 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP2014067169A (ja) * | 2012-09-25 | 2014-04-17 | Toyota Motor Corp | 衝突予測装置 |
| JP2014106901A (ja) * | 2012-11-29 | 2014-06-09 | Aisin Seiki Co Ltd | 距離算出装置、衝突検出システム、距離算出方法、衝突検出方法、及びプログラム |
| JP2014213776A (ja) * | 2013-04-26 | 2014-11-17 | 株式会社デンソー | 衝突判定装置、および衝突緩和装置 |
| WO2014192137A1 (ja) * | 2013-05-31 | 2014-12-04 | トヨタ自動車株式会社 | 移動軌跡予測装置及び移動軌跡予測方法 |
| WO2016047495A1 (ja) * | 2014-09-24 | 2016-03-31 | 株式会社デンソー | 物体検出装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109087485A (zh) * | 2018-08-30 | 2018-12-25 | Oppo广东移动通信有限公司 | 驾驶提醒方法、装置、智能眼镜及存储介质 |
| CN109087485B (zh) * | 2018-08-30 | 2021-06-08 | Oppo广东移动通信有限公司 | 驾驶提醒方法、装置、智能眼镜及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20190122555A1 (en) | 2019-04-25 |
| US11288961B2 (en) | 2022-03-29 |
| WO2017183668A1 (ja) | 2017-10-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10854081B2 (en) | Driving assistance device and driving assistance method | |
| JP6561584B2 (ja) | 車両制御装置、及び車両制御方法 | |
| CN108156822B (zh) | 车辆控制装置,以及车辆控制方法 | |
| JP2017194926A (ja) | 車両制御装置、車両制御方法 | |
| EP2803547B1 (en) | Collision mitigation apparatus | |
| JP6453695B2 (ja) | 運転支援装置、及び運転支援方法 | |
| JP6729282B2 (ja) | 車両制御装置 | |
| CN109572690B (zh) | 车辆控制装置 | |
| JP6491596B2 (ja) | 車両制御装置及び車両制御方法 | |
| JP6669090B2 (ja) | 車両制御装置 | |
| US20150232073A1 (en) | Collision avoidance assistance device and collision avoidance assistance method | |
| WO2018056212A1 (ja) | 物体検知装置及び物体検知方法 | |
| JP6740970B2 (ja) | 走行支援装置 | |
| JP2017114430A (ja) | 車両制御装置及び車両制御方法 | |
| WO2017104773A1 (ja) | 移動体制御装置及び移動体制御方法 | |
| WO2016158944A1 (ja) | 車両制御装置及び車両制御方法 | |
| JP2016224825A (ja) | 車両制御装置、及び車両制御方法 | |
| JP2017191382A (ja) | 車両制御装置、及び車両制御方法 | |
| JP7054327B2 (ja) | 走行支援装置 | |
| JP6693380B2 (ja) | 車両制御装置 | |
| WO2017164017A1 (ja) | 車両検知装置 | |
| JP6493280B2 (ja) | 物体検知装置、物体検知方法 | |
| JP6699568B2 (ja) | 車両制御装置 | |
| JP6462610B2 (ja) | 横断判定装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190903 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191021 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20200407 |