WO2016147254A1 - 搬送システム - Google Patents
搬送システム Download PDFInfo
- Publication number
- WO2016147254A1 WO2016147254A1 PCT/JP2015/057492 JP2015057492W WO2016147254A1 WO 2016147254 A1 WO2016147254 A1 WO 2016147254A1 JP 2015057492 W JP2015057492 W JP 2015057492W WO 2016147254 A1 WO2016147254 A1 WO 2016147254A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- zone
- data
- signal
- load
- value
- Prior art date
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G43/00—Control devices, e.g. for safety, warning or fault-correcting
- B65G43/02—Control devices, e.g. for safety, warning or fault-correcting detecting dangerous physical condition of load carriers, e.g. for interrupting the drive in the event of overheating
Definitions
- the present invention relates to a transport system for appropriately transporting articles in a wide indoor space such as a factory or a warehouse.
- Japanese Patent Application Laid-Open No. 2002-12315 discloses a roller conveyance device in which a large number of drive rollers are arranged in parallel across a conveyance path with a free roller interposed therebetween.
- a plurality of control units constituting the control device share the same control information, thereby improving the transmission efficiency between the control units.
- an object of the present invention is to provide a transport system that can easily check the operation state of the drive means of the transport path scattered in a wide space without requiring time and labor.
- the transport system includes a transport path divided into a plurality of zones arranged side by side in the transport direction, and detects the presence or absence of a transported object in each of the plurality of zones.
- Processing means are arranged.
- the arithmetic processing means acquires information on the presence sensor arranged in the upstream zone upstream of the own zone where the arithmetic processing means is arranged, and when a conveyance object enters the front zone Operate the driving means arranged in the own zone, when there is a load in the previous zone, and when there is no load in the own zone, the presence or absence of a drive system is determined by the comparison calculation, When there is a load in the own zone, it is determined whether there is an overweight by the comparison calculation.
- the abnormality of the drive system means, for example, a state in which a torque cross is generated inside the drive means due to wear of a mechanical part such as a bearing of the drive means or lubricating oil, a state in which the roller is idle, or a roller In this state, the belt on the belt slips with respect to the roller.
- the set value may be set based on the electric signal obtained by the detecting means.
- the slave station includes the arithmetic processing unit, and the set value is the data signal May be transmitted to each of the slave stations from a master station connected to the plurality of slave stations in a state where transmission / reception is possible.
- Each of the plurality of slave stations connected in a state capable of transmitting and receiving data signals is arranged in each of the plurality of zones, and the slave station includes the arithmetic processing unit and is arranged in the own zone.
- Information on the presence sensor may be output as the data signal, and information on the presence sensor arranged in the previous zone may be acquired via the data signal.
- the comparison is performed between the calculated value obtained based on the value of the electrical signal that changes in accordance with the output torque of the driving means of the transport path and the predetermined set value, and is provided side by side in the transport direction.
- it is determined whether there is an abnormality. Therefore, by using the determination result in each zone, it is possible to easily confirm the operation state of the driving means of the conveyance paths scattered in a wide space without requiring time and labor.
- abnormalities in the drive system can be determined by separating the judgment when there is a load in the previous zone and no load in the own zone and when there is a load in the own zone. And the presence or absence of overweight can be distinguished and determined. That is, the operation state of the driving means of the conveyance paths scattered in a wide space can be confirmed easily and in detail without requiring time and labor.
- the set value used for the comparison calculation is set in the calculation processing unit based on the electric signal obtained by the detection unit, the specification of the driving unit, the connection state between the roller and the driving unit, or the roller It is possible to set accurately for each zone according to the contact state of the belt.
- each of a plurality of slave stations connected in a state capable of transmitting and receiving data signals is arranged in each of the plurality of zones, and these slave stations are provided with arithmetic processing means, they are used for comparison calculation.
- the set value can be transmitted to each of the slave stations from the master station connected to the plurality of slave stations in a state where data signals can be transmitted and received.
- the setting value is transmitted from the master station to each of the slave stations, reducing the time and effort required for setting work compared to setting the setting value for each zone. can do.
- each of a plurality of slave stations connected in a state in which data signals can be transmitted and received is arranged in each of the plurality of zones, and the slave stations are provided with arithmetic processing means, It is possible to output the information on the stock sensors arranged in the data zone as data signals, and obtain the information on the stock sensors arranged in the previous zone via the data signals. That is, it is possible to omit the wiring for acquiring the information of the in-stock sensors arranged in the other zones, and to simplify the system configuration.
- this transport system forms a transport path with a plurality of rollers 7 arranged side by side, and transports articles by rotating the rollers 7 in the same direction.
- the conveyance path is controlled by being divided into a plurality of zones.
- a motor 5 that drives the roller 7 and a load sensor 6 that detects the presence or absence of an article (conveyed object) that is a conveyance object are provided.
- the motor 5 in a specific zone may be displayed as Mn (n is a zone number) using a zone number.
- the stock sensor 6 for a particular zone may display SLn using the zone number.
- a slave station 4 is also arranged.
- the motor 5 and the stock sensor 6 are connected to the slave stations 4 arranged in each zone in each zone.
- Each slave station 4 is connected to the common data signal lines DP and DN provided separately from the common power supply lines P and N for supplying the driving power of the motor 5, and is detected by the in-stock sensor 6 of the local station.
- Information on the presence / absence of a conveyed product is output to the common data signal lines DP and DN.
- previous zone located upstream of the zone
- local zone located upstream of the zone
- the conveyed product enters the n-1th zone which is the previous zone, and the in-stock sensor SLn-1 in the n-1th zone removes the conveyed product.
- the slave station 4 starts the motor Mn in its own zone. In this way, by moving the roller 7 of the own zone (nth zone) when the conveyed product enters the previous zone (n-1th zone), the conveyed product can be smoothly transferred from the previous zone to the own zone. It can be transported.
- the timing at which the slave station 4 starts the motor Mn in its own zone may be determined according to the transport speed and the dimensions of the transported object.
- the adjacent zone on the upstream side is set as the previous zone, but a zone separated by a plurality of zones on the upstream side may be set as the previous zone.
- the motor torque td increases rapidly upon activation, and then reaches a stable state (horizontal state after time A2 in FIG. 6) when a predetermined conveyance speed is reached, and this state is continued. .
- the torque value in this stable state becomes a constant value when operating normally in the state where there is no conveyed product.
- This transport system determines the presence or absence of an abnormality in the drive system by comparing the torque value in a stable state (hereinafter referred to as “no-load stable state”) when there is no transported object with a value that should be taken during normal operation. .
- the torque value in the stable state when there is a transport load varies depending on the size of the transport load.
- a torque value in a stable state when the transport load is present (hereinafter referred to as “load stable state”) is set to a torque value when a normal load is applied, with a tolerance of a predetermined ratio j%.
- a master station 2 Also connected to the common data signal lines DP and DN is a master station 2 that exchanges data with the slave station 4 and controls the system.
- the master station 2 includes a control unit 1, an output data unit 21, a management data unit 22, a timing generation unit 23, a master station output unit 24, a master station input unit 25, and an input data unit 26.
- the control signal which is connected to the common data signal lines DP and DN, is superimposed on the common data signal lines DP and DN, and is superimposed on the common data signal lines DP and DN from the slave station 4.
- Monitor data is extracted from the monitor signal, and arithmetic processing for control is performed.
- the control unit 1 includes a management judgment unit 11 having an arithmetic processing function and an input / output unit 12.
- the management determination unit 11 receives data from the management data unit 22 and the input data unit 26 via the input / output unit 12 and performs necessary arithmetic processing based on a program stored therein.
- the output data unit 21 delivers the data received from the control unit 1 to the master station output unit 24 as serial data.
- the management data unit 22 includes storage means 29 having a nonvolatile function for storing the IDX table. Then, based on the data received from the control unit 1 and the IDX table, the data necessary for specifying the slave station is transferred to the master station output unit 24 as serial data.
- the IDX table is a list of address data for designating the slave station 4 that causes the slave station 4 to output information on the slave station 4 side that cannot be obtained as monitoring data to the data signal lines DP and DN.
- the head address number which is the address data of the slave station 4 is used as the address data.
- the IDX table is created while the master station 2 confirms the head address based on the response from each slave station 4 when the system is activated, and is stored in the storage means 29.
- the timing generation unit 23 includes an oscillation circuit (OSC) 31 and a timing generation unit 32.
- the timing generation unit 32 generates a timing clock of the system based on the oscillation circuit (OSC) 31, and generates a master station output unit 24, Delivered to the station input unit 25.
- OSC oscillation circuit
- the master station output unit 24 includes control data generation means 33 and a line driver 34. Based on the data received from the output data section 21 and the timing clock received from the timing generation section 23, the control data generation means 33 transmits a series of pulse signals to the common data signal lines DP and DN via the line driver 34. Superimpose the signal.
- the transmission procedure is one frame cycle following the control / monitoring data area and the management data area between the start signal ST of the transmission signal and the next start signal ST.
- the start signal ST is longer than the time width of the transmission data signal and has a potential level higher than the threshold value Vst (18 V in this embodiment) of the transmission clock signal.
- the transmission data signal has a potential level area higher than the transmission clock signal threshold Vst (corresponding to the transmission clock signal, +24 V in this embodiment) and a potential level area lower than the transmission clock signal threshold Vst. Consists of.
- the potential level area higher than the threshold Vst of the transmission clock signal is the latter half of one cycle, and the potential level area lower than the threshold Vst of the transmission clock signal is the first half of one cycle. There is no limitation, and the order may be reversed.
- the pulse width of the potential level area lower than the threshold value Vst represents the data of the control signal.
- the pulse width of the potential level area lower than the threshold value Vst constitutes a control data area as control data, and the control data area corresponds to the upper stage of the control / monitoring data area in FIG. .
- the pulse width (3/4) t0 of the transmission clock signal represents the logical data “0”, and the pulse width (1/4) t0 is the logical data “0”. 1 ".
- the length is not limited and may be determined appropriately.
- the data of the monitoring signal is represented by whether the current superimposed on the potential level area lower than the threshold value Vst is larger or smaller than a predetermined value.
- the current value superimposed in the potential level area lower than the threshold value Vst constitutes a monitoring data area as monitoring data, and the monitoring data area is the control / monitoring data area in FIGS. 4 (a) and 4 (b). It corresponds to the lower row.
- a current signal smaller than 10 mA represents logical data “0”, and a current signal larger than 10 mA represents logical data “1”.
- each of the slave stations 4 generates an internal circuit power supply from a transmission clock signal.
- the power supply of the motor 5 arranged in each zone is obtained from the common power supply lines P and N different from the common data signal lines DP and DN.
- control data for each slave station 4 is composed of operation permission data (RE) of the motor 5 and download data (DL) as shown in FIG. 4 (b).
- RE operation permission data
- DL download data
- the size (number of bits) of each data is not considered.
- the operation permission data (RE) is transmitted when the operation of the motor 5 is permitted to the slave station 4 arranged in the zone on the route for conveying the article.
- Download data is output when the no-load normal torque value MS0 and the allowable maximum torque value stored in the initial set value storage means 52 of the slave station input / output unit 40 described later are set on the master station 2 side. Is done.
- the monitoring data for each slave station 4 includes the presence / absence data (SLn) corresponding to the presence detection signal of the presence sensor 6 and an abnormality indicating that the zone operation is abnormal. It consists of data (abnormal 1, abnormal 2, abnormal 3, abnormal 4) and normal data (normal) indicating that the drive system is operating normally.
- a management data area is provided as shown in FIGS. 4 (a) and 4 (b).
- the upper part is an area where data is output from the master station 2 (hereinafter referred to as a management control data area), and the lower part is data is input to the master station 2.
- An area (hereinafter referred to as a management monitoring data area) is shown.
- the first management control data ISTo for instructing the slave station 4 to request information and the second management control data IDXo for specifying the slave station address are superimposed from the master station 2. Is done. Further, the first management monitoring data STi and the second management monitoring data IDXi corresponding to the first management control data ISTo from the slave station 4 specified by the second management control data IDXo are superimposed on the management monitoring data area.
- the master station input unit 25 includes monitoring signal detection means 35 and monitoring data extraction means 36.
- the monitoring signal detection means 35 detects the monitoring signal superimposed on the common data signal lines DP and DN from the slave station 4.
- the monitoring signal data (SLn data, abnormality 1 data, abnormality 2 data, abnormality 3 data, abnormality 4 data, and normal data) has a current superimposed on a potential level lower than the threshold value Vst greater than 10 mA.
- the monitor signal is received from each of the slave stations 4 after the start signal ST is transmitted. Then, the monitoring signal detected by the monitoring signal detection unit 35 is delivered to the monitoring data extraction unit 36.
- the monitoring data extraction unit 36 extracts monitoring data (SLn data, abnormality 1 data, abnormality 2 data, abnormality 3 data, abnormality 4 data, normal data) and management monitoring data in synchronization with the timing from the timing generation unit 32. Then, it is sent to the input data unit 26 as serial input data.
- monitoring data Sn data, abnormality 1 data, abnormality 2 data, abnormality 3 data, abnormality 4 data, normal data
- management monitoring data in synchronization with the timing from the timing generation unit 32. Then, it is sent to the input data unit 26 as serial input data.
- IDX table creation process when a response from the slave station 4 is extracted for the address designated by the master station 2, the response is delivered to the management data unit 22. Receiving this, the management data unit 22 stores the head address at that time in the storage unit 29 as data of the IDX table, as described above.
- the input data unit 26 converts the serial input data received from the monitoring data extracting means 36 into parallel data, and sends it to the input / output unit 12 of the control unit 1 as monitoring data and management monitoring data.
- the slave station 4 includes a slave station input / output unit 40, a slave station line receiver 53, a slave station line driver 54, motor drive means 55, torque detection means 60, and an initial setting switch SWn.
- the motor driving means 55 receives power from the DC power supply 8 provided outside the slave station 4 via the common power supply lines P and N, and outputs an output signal from the operation means 47 of the slave station input / output unit 40 described later. Based on the above, the motor 5 is driven or stopped.
- the torque detection means 60 includes a small resistance r inserted in series between the input terminals of the common power supply lines P and N and the motor driving means 55, and a small resistance when the motor current I flows through the small resistance r.
- the current torque value of the motor 5 is obtained from the analog DC voltage signal generated at both ends of r.
- the small resistance r may be any as long as it does not affect the operation of the motor 5, and a clamp-type current sensor may be used instead of the small resistance r.
- the analog DC voltage signal generated at both ends of the small resistor r is amplified by the amplifier 61 and converted into a digital signal by the A / D converter 62. Then, the current / torque conversion means 63 converts the value of the digital signal Id input from the A / D conversion means 62 into a torque data value according to the I / T conversion coefficient K.
- the torque data value (current torque value) obtained by the current / torque conversion means 63 is delivered to the comparison means 49 and the initial set value storage means 52 of the slave station input / output unit 40 described later.
- the slave station input / output unit 40 includes a transmission receiving means 41, an address extracting means 42, a local address setting means 43, a local zone control data extracting means 44, a previous zone monitoring data extracting means 45, a monitoring data. It has a transmission means 46, an operation means 47, a stable time detection means 48, a comparison means 49, an input means 50, an initial set value instruction means 51, and an initial set value storage means 52.
- the slave station 4 of this embodiment includes an MCU that is a microcomputer control unit as an internal circuit, and this MCU functions as the slave station input / output unit 40.
- the transmission reception means 41 receives the transmission signal transmitted to the common data signal lines DP and DN via the slave station line receiver 53 and delivers it to the address extraction means 42.
- the address extracting means 42 counts transmission signal pulses starting from a start signal ST indicating the start of the transmission data signal. Then, at the timing when the count value coincides with the own station address data set by the own station address setting means 43, the transmission reception signal is delivered to the own zone control data extracting means 44 and the monitoring data transmitting means 46 is made effective. .
- the address extraction means 42 also delivers the transmission reception signal to the previous zone monitoring data extraction means 45 at a timing that matches the address data of the slave station 4 arranged in the previous zone, which is obtained based on the local station address data.
- the monitoring data transmission means 46 When the monitoring data transmission means 46 is validated by the address extraction means 42, the presence / absence data (SLn), abnormality 1 data, abnormality 2 data, abnormality 3 data, abnormality 4 data delivered from the input means 50, Alternatively, normal data is output as a monitoring signal to the common data signal lines DP and DN via the slave station line driver 54. The monitoring signal is superimposed on the monitoring data area of the transmission procedure.
- the own zone control data extraction means 44 extracts control data from the transmission reception signal delivered from the address extraction means 42. If the extracted control data permits the operation of the motor 5 in the own zone, an ON signal is output to the operating means 47.
- the previous zone monitoring data extracting unit 45 extracts monitoring data related to detection of the stock sensor 6 in the previous zone from the transmission reception signal delivered from the address extracting unit 42.
- the extracted monitoring data is data indicating the presence of a transported object
- an ON signal is output to the operating means 47 and the stable time detecting means 48.
- the operation zone 47 When the operation means 47 receives the ON signal from the previous zone monitoring data extraction means 45 or the detection signal indicating that there is a transported object from the stock sensor 6 via the input means 50, the operation zone 47 has its own zone control data. When an ON signal is received from the extraction means 44, a drive instruction is output to the motor drive means 55.
- the stable time detecting means 48 measures the elapsed time from the timing of receiving the ON signal from the previous zone monitoring data extracting means 45, and after the preset stable time ton has elapsed, the first valid signal is compared with the comparing means. 49.
- the stable time detecting means 48 also measures the elapsed time from the timing when the detection signal indicating that there is a conveyed object is received from the in-stock sensor 6 via the input means 50, and the preset stable time ton is After elapses, the second valid signal is output to the comparison means 49.
- the comparison means 49 receives the first valid signal from the stable time detection means 48. Then, the comparison is performed between the data (current torque value) delivered from the current / torque conversion means 63 and the no-load normal torque value MS0 delivered from the initial set value storage means 52.
- the current torque value is a value in the allowable torque range including the no-load normal torque value MS0 (a range obtained by adding or subtracting a predetermined percentage k% tolerance to the no-load normal torque value MS0) (m0 shown in FIG. 6).
- the data indicating normality is delivered to the input means 50.
- the timer TM1 (first valid signal) in the stable time detecting means 48 is turned “ON”, the stock detection signal is “no stock”, and the current torque value. Is determined to be “normal” with the AND condition being m0 included in the allowable torque range.
- abnormal data 1 abnormal data 1 indicating that the device life of the motor 5 is approaching is delivered to the input means 50.
- the timer TM1 (first effective signal) in the stable time detecting means 48 is “ON”, the presence detection signal of the own zone is “no arrival”, and An “abnormal 1” determination is made based on an AND condition that the current torque value is m0h, which is larger than the no-load allowable maximum torque value.
- abnormal data 2 indicating idling of the roller 7 or slip of the belt is handed over to the input means 50.
- the timer TM1 (first effective signal) in the stable time detecting means 48 is “ON”, the presence detection signal of the own zone is “no arrival”, and An “abnormal 2” determination is made on the basis of an AND condition that the current torque value is m0l smaller than the no-load allowable minimum torque value.
- the current torque value in the no-load stable state is smaller than the maximum allowable torque value at no load (the normal torque value at no load plus a predetermined percentage k% tolerance) (in the case of m0l shown in FIG. 6). ) Means that the roller 7 is idling or the belt is slipping.
- the comparison means 49 further indicates that the presence detection signal received from the arrival sensor 6 via the input means 50 indicates that there is a transported object (there is presence of goods), and then the stabilization time detection means 48 to the second time.
- the data (current torque value) delivered from the current / torque conversion means 63 is compared with the allowable maximum torque value delivered from the initial set value storage means 52.
- abnormal data 3 abnormal data 3 indicating that the load weight is excessive (overweight). To hand over.
- the timer TM2 (second effective signal) in the stable time detecting means 48 is “ON”, the presence detection signal of the own zone is “present presence”, and An “abnormality 3” determination is made on the basis of an AND condition that the current torque value is n0h which is larger than the allowable maximum torque value NS0 + j%.
- the input unit 50 delivers the normal data, abnormal data 1, abnormal data 2, and abnormal data 3 delivered from the comparison unit 49 to the monitoring data transmission unit 46. Further, the presence / absence data (SLn) is delivered to the monitoring data transmission means 46 based on the contents of the presence detection signal input from the presence sensor 6. Further, when receiving an abnormality detection signal output from the thermo protector 9 when the motor 5 is in a high temperature state, the abnormality data 4 is delivered to the monitoring data transmission means 46.
- the data delivered to the monitoring data transmitting means 46 is superimposed on the monitoring data area of the transmission procedure as a monitoring signal as described above.
- the abnormality detection signal output from the thermo protector 9 is also input to the motor driving means 55. Upon receiving the abnormality detection signal, the motor driving means 55 causes the motor 5 to stop urgently.
- the initial setting switch SWn is used when the comparison means 49 sets a normal torque value used for comparison determination processing. Since it is clear that the drive system is normal before the start of use of the system, after replacement of the motor 5, or after replacement of the belt, the torque value at that time is a normal torque value. Therefore, when the current torque value when it is clear that the current torque value becomes the normal torque value is set as the normal torque value, the initial setting switch SWn is set to “ON”.
- the initial setting value instruction means 51 When the initial setting switch SWn is set to “ON”, the initial setting value instruction means 51 outputs an ON signal to the initial setting value storage means 52.
- the initial set value storage means 52 When the stock detection signal received from the stock sensor 6 via the input means 50 is the initial set value storage means 52 indicating that there is no transported object (no stock), the initial set value storage means 52 When the ON signal is received, the current torque value delivered from the torque detection means 60 is stored as a normal torque value MS0 at no load.
- an ON signal from the initial setting value instruction means 51 is received.
- a value obtained by adding a tolerance of a predetermined ratio j% to the current torque value delivered from the torque detection means 60 is stored as an allowable maximum torque value WS0 + j%.
- the timing when the initial setting switch SWn is set to “ON” is when an article having a standard weight is placed on the conveyance path of the own zone. The user decides that the item is a standard weight.
- the initial set value storage means 52 When the ON signal is not received from the initial set value instruction means 51, that is, the initial set value storage means 52 during normal operation is a case where the stock detection signal indicates that there is no conveyed product (no stock).
- the normal torque value MS0 at no load is transferred to the comparison means 49 when the load detection signal indicates that a load is present (the load is present).
- the initial setting of the no-load normal torque value MS0 and the allowable maximum torque value WS0 + j% may be performed via the master station 2.
- the no-load normal torque value MS0 and the allowable maximum torque value WS0 + j% As described above, the download data is transmitted using the control data area.
- the slave station input / output unit 40 extracts its own zone DL data indicated by an imaginary line in FIG. Means 56 shall be provided.
- the own zone DL data extracting unit 56 receives and transmits from the address extracting unit 42 in the same manner as the own zone control data extracting unit 44 at the same timing as the own zone control data extracting unit 44 receives the transmission reception signal from the address extracting unit 42. Receive a signal.
- the no-load normal torque value MS0 and the allowable maximum torque value WS0 + j% are extracted from the transmission reception signal and delivered to the initial set value storage means 52 by a predetermined procedure.
- the no-load normal torque value MS0 and the allowable maximum torque value WS0 + j% delivered from the own zone DL data extraction means 56 to the initial setting value storage means 52 are the same as those set via the initial setting switch SWn.
- the set value storage means 52 delivers the comparison value to the comparison means 49.
- the setting by the initial setting switch SWn and the download from the master station 2 may be used together.
- initial setting is performed via the initial setting switch SWn in an arbitrary zone, and the normal torque value MS0 at no load and the allowable maximum torque value WS0 + j% set there are uploaded via the master station 2. Then, the uploaded data is stored in the storage unit of the control unit 1 and transmitted to each of the slave stations 4 in the same zone of the specification via the master station 2.
- the master station 2 When there are many zones of the same specification with the same configuration of the motor 5 and the roller 7, it is possible to reduce labor and time required for the setting work, compared to the case where setting values are set for all the zones. .
- the normal torque value MS0 at no load and the allowable maximum torque value WS0 + j% set via the initial setting switch SWn are uploaded via the master station 2 each time, and these individual data are controlled.
- the data may be stored in the storage unit of the unit 1, and these data may be collectively transmitted to each of the slave stations 4 via the master station 2 when the system is activated.
- the master station 2 and the plurality of slave stations 4 are connected by the common data signal lines DP and DN.
- the connection method is not limited as long as data signals can be transmitted and received.
- wireless connection may be used.
Landscapes
- Control Of Conveyors (AREA)
Abstract
搬送方向に並んで設けられた複数のゾーンに分割された搬送路を備え、前記複数のゾーンの各々に、前記搬送路の駆動手段と、搬送物の有無を検出する在荷センサと、前記駆動手段の出力トルクに応じて変化する電気信号を得る検出手段と、前記電気信号の値に基づいて得られた算出値と所定の設定値との比較演算を行う演算処理手段が配置される。前記演算処理手段は、前記演算処理手段が配置されている自ゾーンの上流側の前ゾーンに配置された前記在荷センサの情報を取得して、搬送対象物が前記前ゾーンに進入したときに前記自ゾーンに配置された前記駆動手段を動作させ、前記前ゾーンに在荷が有り、前記自ゾーンに在荷が無いときに、前記比較演算により、駆動系の異常の有無を判定し、前記自ゾーンに在荷が有るときに、前記比較演算により、過重量の有無を判定する。
Description
本発明は、工場や倉庫などの広い屋内空間で物品の搬送を適切に行うための搬送システムに関する。
工場や倉庫などの広い屋内空間における物品の搬送には、並べて配置された複数のローラで搬送路を形成し、ローラ上にある物品をローラの回転により搬送方向に送り出す手法が広く採用されている。そして、この手法を採用した様々な搬送装置が提案されている。
例えば、特開2002-12315号公報には、駆動ローラが自由ローラを挟んで搬送経路に亘って多数並設されたローラ搬送装置が開示されている。このローラ搬送装置では、制御装置を構成する複数の制御ユニットが同一の制御情報を共有することにより制御ユニット間の伝送効率の向上が図られている。
ローラで構成される搬送路の駆動手段が複数並べて配置される構成の搬送装置を使用する場合、駆動手段が広い空間に点在することになる。そのため、駆動手段の点検作業においては、駆動手段が設置されている場所の移動に時間や手間を要する問題があった。
そこで、本発明は、広い空間に点在する搬送路の駆動手段の動作状態を、時間や手間を要せず、容易に確認できる搬送システムを提供することを目的とする。
本発明にかかる搬送システムは、搬送方向に並んで設けられた複数のゾーンに分割された搬送路を備え、前記複数のゾーンの各々に、前記搬送路の駆動手段と、搬送物の有無を検出する在荷センサと、前記駆動手段の出力トルクに応じて変化する電気信号を得る検出手段と、前記電気信号の値に基づいて得られた算出値と所定の設定値との比較演算を行う演算処理手段が配置される。
前記演算処理手段は、前記演算処理手段が配置されている自ゾーンの上流側の前ゾーンに配置された前記在荷センサの情報を取得して、搬送対象物が前記前ゾーンに進入したときに前記自ゾーンに配置された前記駆動手段を動作させ、前記前ゾーンに在荷が有り、前記自ゾーンに在荷が無いときに、前記比較演算により、駆動系の異常の有無を判定し、前記自ゾーンに在荷が有るときに、前記比較演算により、過重量の有無を判定する。
なお、本発明において駆動系の異常とは、例えば、駆動手段の軸受けや潤滑油などの機構部品などの損耗などにより駆動手段の内部にトルクロスが生じた状態、ローラが空転した状態、或いは、ローラに掛けられたベルトがローラに対しスリップした状態である。
前記設定値は、前記検出手段により得られた前記電気信号に基づいて設定されるものであってもよい。
前記複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、前記子局は、前記演算処理手段を備え、前記設定値は、前記データ信号の送受信が可能な状態で前記複数の子局と接続された親局から、前記子局の各々に送信されるものであってもよい。
前記複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、前記子局は、前記演算処理手段を備え、前記自ゾーンに配置された前記在荷センサの情報を前記データ信号として出力し、前記前ゾーンに配置された前記在荷センサの情報を前記データ信号を介して取得するものであってもよい。
本発明によれば、搬送路の駆動手段の出力トルクに応じて変化する電気信号の値に基づいて得られた算出値と所定の設定値との比較演算により、搬送方向に並んで設けられた複数のゾーンの各々において、異常の有無が判定される。従って、各ゾーンにおける判定の結果を利用することにより、広い空間に点在する搬送路の駆動手段の動作状態を、時間や手間を要せず容易に確認することができる。
しかも自ゾーンの駆動手段が動作している場合に、前ゾーンに在荷が有り自ゾーンに在荷が無いときと、自ゾーンに在荷が有るときの判定を分けることにより、駆動系の異常と、過重量の有無を区別して判定することができる。すなわち、広い空間に点在する搬送路の駆動手段の動作状態を、時間や手間を要せず、容易に、しかも詳細に確認することができる。
また、比較演算に用いられる設定値が、検出手段により得られた電気信号に基づいて、演算処理手段において設定されるものであれば、駆動手段の仕様、ローラと駆動手段の連結状態、或いはローラとベルトの接触状態などに応じた、ゾーン毎の正確な設定が可能となる。
更に、複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、それら子局に演算処理手段を備えることとすれば、比較演算に用いられる設定値を、データ信号の送受信が可能な状態で複数の子局と接続された親局から子局の各々に送信することが可能となる。同じ仕様のゾーンが多く存在する場合には、親局から子局の各々に設定値を送信することにより、ゾーン毎に設定値を設定する場合と比較し、設定作業に要する手間や時間を削減することができる。
なお、複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、それら子局に演算処理手段を備えることとした場合、子局が自ゾーンに配置された在荷センサの情報をデータ信号として出力し、前ゾーンに配置された在荷センサの情報をデータ信号を介して取得することが可能となる。すなわち、他ゾーンに配置された在荷センサの情報を取得するための配線を省略し、システム構成の簡素化を図ることができる。
図1~6を参照しながら、本発明に係る搬送システムの実施形態を説明する。
この搬送システムは、図1に示すように、並べて配置された複数のローラ7で搬送路を形成し、ローラ7を同一方向に回転させることにより物品を搬送するものである。搬送路は複数のゾーンに分けて制御され、ゾーン毎に、ローラ7を駆動させるモータ5と、搬送対象物である物品(搬送物)の有無を検知する在荷センサ6が設けられている。なお、以下の説明において、特定のゾーンのモータ5は、ゾーン番号を使用してMn(nはゾーン番号)と表示する場合がある。同様に、特定のゾーンの在荷センサ6は、ゾーン番号を使用してSLnと表示する場合がある。
この搬送システムは、図1に示すように、並べて配置された複数のローラ7で搬送路を形成し、ローラ7を同一方向に回転させることにより物品を搬送するものである。搬送路は複数のゾーンに分けて制御され、ゾーン毎に、ローラ7を駆動させるモータ5と、搬送対象物である物品(搬送物)の有無を検知する在荷センサ6が設けられている。なお、以下の説明において、特定のゾーンのモータ5は、ゾーン番号を使用してMn(nはゾーン番号)と表示する場合がある。同様に、特定のゾーンの在荷センサ6は、ゾーン番号を使用してSLnと表示する場合がある。
各ゾーンには、また、子局4が配置されている。そして、モータ5及び在荷センサ6は、各ゾーンにおいて、各ゾーンに配置された子局4に接続されている。
各々の子局4は、モータ5の駆動電力を供給する共通の電源線P、Nとは別に設けられた共通データ信号線DP、DNに接続され、自局の在荷センサ6により検知される搬送物の有無の情報を共通データ信号線DP、DNに出力する。また、共通データ信号線DP、DNを介し、自局が配置されているゾーン(以下「自ゾーン」とする)の上流側に位置するゾーン(以下「前ゾーン」とする)における搬送物の有無情報を取得し、その情報に基づきモータ5を制御する。
自ゾーンが第nゾーンである場合、図6に示すように、搬送物が、前ゾーンである第n-1ゾーンに進入し、第n-1ゾーンの在荷センサSLn-1が搬送物を検知したとき(図6に示す時間A1)、子局4は自ゾーンのモータMnを始動する。このように、搬送物が前ゾーン(第n-1ゾーン)に進入した段階で自ゾーン(第nゾーン)のローラ7を動作させておくことにより、前ゾーンから自ゾーンへ搬送物の円滑な搬送を図ることができる。
なお、子局4が自ゾーンのモータMnを始動するタイミングは、搬送速度や搬送物の寸法に応じて決めればよい。この実施形態では、上流側の隣接したゾーンを前ゾーンとしているが、上流側に複数ゾーン離れたゾーンを前ゾーンとしてもよい。
モータトルクtdは、図6に示すように、起動により急激に増加した後、所定の搬送速度となったときに安定状態(図6における時間A2以降の水平状態)となり、その状態が継続される。そして、この安定状態におけるトルク値は、搬送物が無い状態で正常に動作する場合に、一定の値となる。この搬送システムは、搬送物が無いときの安定状態(以下、「無負荷安定状態」とする)のトルク値を正常動作時にとるべき値と比較することにより、駆動系の異常の有無を判定する。
また、搬送物が第n-1ゾーンから第nゾーンに搬送されると、第nゾーンのローラ7には搬送負荷がかかるため、第nゾーンのモータMnの出力トルクは大きくなる。そのため、モータトルクtdは、図6に示すように、搬送物の自ゾーンへの搬送に伴い急激に増加し(図6に示す時間B1)、所定の搬送速度となったときに安定状態(図6における時間B2以降の水平状態)となる。
搬送負荷があるときの安定状態のトルク値は、搬送負荷の大きさにより異なる。そこで、この搬送システムは、搬送負荷があるときの安定状態(以下、「有負荷安定状態」とする)のトルク値を、通常負荷がかかったときのトルク値に所定割合j%の許容差を加えた許容最大トルク値NS0+j%と比較することにより、過重量の判定を行う。
共通データ信号線DP、DNには、また、子局4とデータを授受しシステムの制御を行う親局2が接続されている。
親局2は、図2に示すように、制御部1、出力データ部21、管理データ部22、タイミング発生部23、親局出力部24、親局入力部25、入力データ部26を備える。そして、共通データ信号線DP、DNに接続され、一連のパルス状信号である制御信号を共通データ信号線DP、DNに重畳するとともに、子局4から共通データ信号線DP、DNに重畳された監視信号から監視データを抽出し、制御のための演算処理を行う。
制御部1は、演算処理機能を持つ管理判断手段11と入出力ユニット12を備える。管理判断手段11は、入出力ユニット12を介して管理データ部22および入力データ部26からデータを受け取り、内部に記憶されたプログラムに基づいて必要な演算処理を行う。
出力データ部21は、制御部1から受けたデータをシリアルデータとして親局出力部24へ引き渡す。
管理データ部22は、IDXテーブルを記憶する不揮発性機能を持つ記憶手段29を備える。そして、制御部1から受けたデータとIDXテーブルに基づき子局の指定に必要となるデータをシリアルデータとして親局出力部24へ引き渡す。
IDXテーブルは、子局4に対し、監視データとして得られない子局4側の情報を、データ信号線DP、DNに出力させる子局4を指定するためのアドレスデータのリストである。なお、この実施形態では、アドレスデータとして子局4のアドレスデータである先頭アドレス番号が用いられている。そして、IDXテーブルは、システム起動時に、各子局4からの応答に基づき先頭アドレスを親局2が確認しながら作成され、記憶手段29に記憶される。
タイミング発生部23は、発振回路(OSC)31とタイミング発生手段32からなり、発振回路(OSC)31を基にタイミング発生手段32が、このシステムのタイミングクロックを生成し親局出力部24、親局入力部25に引き渡す。
親局出力部24は、制御データ発生手段33とラインドライバ34からなる。制御データ発生手段33が、出力データ部21から受けたデータと、タイミング発生部23から受けたタイミングクロックに基づき、ラインドライバ34を介して共通データ信号線DP、DNに一連のパルス状信号として伝送信号を重畳する。
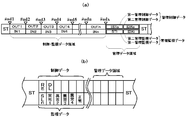
伝送手順は、伝送信号のスタート信号STと次のスタート信号STの間の、制御・監視データ領域、そして管理データ領域と続く1フレームサイクルであり、図4に示すように、伝送データ信号が複数連なって構成される。スタート信号STは、伝送データ信号の時間幅より長く、伝送クロック信号の閾値Vst(この実施例では18V)より高い電位レベルとなっている。
伝送データ信号は、図5に示すように、伝送クロック信号の閾値Vstより高い電位レベルエリア(伝送クロック信号に相当し、この実施例では+24V)と伝送クロック信号の閾値Vstよりも低い電位レベルエリアで構成される。なお、この実施形態では、伝送クロック信号の閾値Vstより高い電位レベルエリアが1周期の後半と、伝送クロック信号の閾値Vstよりも低い電位レベルエリアが1周期の前半とされているが、その順番に制限はなく、これらの順番を逆にしてもよい。
伝送クロック信号において、閾値Vstより低い電位レベルエリアのパルス幅が、制御信号のデータを表すものとなっている。そして、閾値Vstより低い電位レベルエリアのパルス幅が制御データとして制御データ領域を構成し、その制御データ領域は、図4(a)における制御・監視データ領域の上段に相当するものとなっている。
この実施形態では、伝送データ信号の1周期をt0とした時、伝送クロック信号のパルス幅(3/4)t0が論理データ“0”を表し、パルス幅(1/4)t0が論理データ“1”を表している。ただし、制御部1から入力される制御データの値に応じたものであれば、その長さに制限はなく適宜に決めればよい。
伝送クロック信号において、閾値Vstよりも低い電位レベルエリアに重畳される電流が所定値より大きいか小さいかで、監視信号のデータを表すものとなっている。そして、閾値Vstよりも低い電位レベルエリアに重畳される電流値が監視データとして監視データ領域を構成し、その監視データ領域は、図4(a)、図4(b)における制御・監視データ領域の下段に相当するものとなっている。
この実施形態では、10mAより小さい電流信号が論理データ“0”を表し、10mAより大きい電流信号が論理データ“1”を表している。
なお、子局4は、いずれも、内部回路電源を伝送クロック信号から生成するものとなっている。一方、各ゾーンに配置されているモータ5の電源は、共通データ信号線DP、DNとは別の共通の電源線P、Nから得るものとなっている。
この実施形態において、子局4ごとの制御データは、図4(b)に示すように、モータ5の稼働許可データ(RE)、及び、ダウンロードデータ(DL)で構成されている。なお、図4(b)の表示において、各データの大きさ(ビット数)は考慮されていない。
稼働許可データ(RE)は、物品を搬送する経路上のゾーンに配置された子局4に対し、モータ5の稼働を許可するときに送信される。
ダウンロードデータ(DL)は、後述する子局入出力部40の初期設定値記憶手段52に記憶される無負荷時正常トルク値MS0と許容最大トルク値を、親局2側で設定する場合に出力される。
子局4ごとの監視データは、図4(b)に示すように、在荷センサ6の在荷検知信号に応じた在荷有無データ(SLn)、ゾーンの動作に異常のあることを示す異常データ(異常1、異常2、異常3、異常4)、および、駆動系が正常に動作していることを示す正常データ(正常)で構成されている。
制御・監視データ領域の後には、図4(a)、図4(b)に示すように、管理データ領域が設けられている。なお、図4(a)、図4(b)において、上段は親局2からデータが出力される領域(以下、管理制御データ領域とする)を、下段は親局2へデータが入力される領域(以下、管理監視データ領域とする)を示すものとなっている。
管理制御データ領域には、子局4に対して情報を要求する等の指示をなす第一管理制御データISTo、および、子局アドレスを指定する第二管理制御データIDXoが、親局2から重畳される。また、管理監視データ領域には、第二管理制御データIDXoで指定された子局4から第一管理制御データISToに対応する第一管理監視データSTi及び第二管理監視データIDXiが重畳される。
親局入力部25は監視信号検出手段35と監視データ抽出手段36で構成される。監視信号検出手段35は、子局4から共通データ信号線DP、DNに重畳された監視信号を検出する。
監視信号のデータ(SLnデータ、異常1データ、異常2データ、異常3データ、異常4データ、正常データ)は、既述のように、閾値Vstより低電位レベルに重畳される電流が10mAより大きいか小さいかで表されており、スタート信号STが送信された後、子局4の各々から監視信号を受け取るものとなっている。そして、監視信号検出手段35で検出された監視信号は、監視データ抽出手段36に引き渡される。
監視データ抽出手段36は、タイミング発生手段32からのタイミングに同期して、監視データ(SLnデータ、異常1データ、異常2データ、異常3データ、異常4データ、正常データ)および管理監視データを抽出し、直列の入力データとして入力データ部26に送出する。なお、IDXテーブル作成処理において、親局2が指定したアドレスに対する子局4からの応答が抽出された場合には、その応答が管理データ部22に引き渡される。これを受けた管理データ部22は、既述のように、そのときの先頭アドレスをIDXテーブルのデータとして記憶手段29に記憶する。
入力データ部26は、監視データ抽出手段36から受け取った直列の入力データを並列(パラレル)データに変換し、監視データおよび管理監視データとして制御部1の入出力ユニット12へ送出する。
子局4は、図3に示すように、子局入出力部40、子局ラインレシーバ53、子局ラインドライバ54、モータ駆動手段55、トルク検出手段60、及び初期設定スイッチSWnを備える。
モータ駆動手段55は、子局4の外部に設けられたDC電源8から、共通の電源線P、Nを介して電力を受け入れ、後述する子局入出力部40の動作手段47からの出力信号に基づき、モータ5を駆動させ、或いは停止させる。
トルク検知手段60は、共通の電源線P、Nの入力端子とモータ駆動手段55の間に直列的に挿入された小抵抗rを備え、モータ電流Iが小抵抗rに流れたときに小抵抗rの両端に発生するアナログのDC電圧信号から、モータ5の現在トルク値を得る。なお、小抵抗rはモータ5の動作に影響を及ばさないものであればよく、小抵抗rの代わりにクランプ式電流センサを使用しても良い。
小抵抗rの両端に発生したアナログのDC電圧信号は、アンプ61で増幅され、A/D変換器62によりデジタル信号に変換される。そして、電流/トルク変換手段63によって、A/D変換手段62から入力されたデジタル信号Idの値がI/T変換係数Kに従ってトルクデータ値に変換される。
電流/トルク変換手段63で得られたトルクデータ値(現在トルク値)は、後述する子局入出力部40の比較手段49と初期設定値記憶手段52に引き渡される。
子局入出力部40は、図3に示すように、伝送受信手段41、アドレス抽出手段42、自局アドレス設定手段43、自ゾーン制御データ抽出手段44、前ゾーン監視データ抽出手段45、監視データ送信手段46、動作手段47、安定時間検出手段48、比較手段49、入力手段50、初期設定値指示手段51および初期設定値記憶手段52を有する。
なお、この実施形態の子局4は、内部回路としてマイクロコンピュータ・コントロール・ユニットであるMCUを備えており、このMCUが子局入出力部40として機能するものとなっている。
処理において必要となる演算や記憶は、このMCUの備えるCPU、RAMおよびROMを使用して実行されるが、子局入出力部40を構成する上記各手段のそれぞれの処理におけるCPU、RAMおよびROMとの関係は、説明の便宜上、図示を省略するものとする。
伝送受信手段41は、共通データ信号線DP、DNに伝送される伝送信号を、子局ラインレシーバ53を介して受け、これをアドレス抽出手段42に引き渡す。
アドレス抽出手段42は、伝送データ信号の始まりを示すスタート信号STを起点として伝送信号パルスをカウントする。そして、そのカウント値が自局アドレス設定手段43で設定された自局アドレスデータと一致するタイミングで、伝送受信信号を自ゾーン制御データ抽出手段44に引き渡すとともに、監視データ送信手段46を有効にする。
アドレス抽出手段42は、また、自局アドレスデータに基づいて得られる、前ゾーンに配置された子局4のアドレスデータと一致するタイミングで、伝送受信信号を前ゾーン監視データ抽出手段45に引き渡す。
監視データ送信手段46は、アドレス抽出手段42により有効とされた場合に、入力手段50から引き渡された在荷有無データ(SLn)、異常1データ、異常2データ、異常3データ、異常4データ、或いは、正常データを、子局ラインドライバ54を介して共通データ信号線DP、DNに監視信号として出力する。監視信号は、伝送手順の監視データ領域に重畳される。
自ゾーン制御データ抽出手段44は、アドレス抽出手段42から引き渡された伝送受信信号から制御データを抽出する。そして、抽出した制御データが、自ゾーンのモータ5の稼働を許可するものであればON信号を動作手段47に出力する。
前ゾーン監視データ抽出手段45は、アドレス抽出手段42から引き渡された伝送受信信号から、前ゾーンにおける在荷センサ6の検知に関する監視データを抽出する。そして、抽出した監視データが搬送物の有ることを示すデータであるとき、動作手段47および安定時間検出手段48にON信号を出力する。
動作手段47は、前ゾーン監視データ抽出手段45からON信号を受けるか、或いは、在荷センサ6から入力手段50を介して搬送物が有ることを示す検出信号を受けた場合、自ゾーン制御データ抽出手段44からのON信号を受けたとき、モータ駆動手段55に駆動指示の出力をする。
安定時間検出手段48は、前ゾーン監視データ抽出手段45からのON信号を受けたタイミングからの経過時間の計測をし、予め設定された安定時間tonが経過した後、第一有効信号を比較手段49に出力する。
安定時間検出手段48は、また、在荷センサ6から入力手段50を介して搬送物が有ることを示す検出信号を受けたタイミングからの経過時間の計測をし、予め設定された安定時間tonが経過した後、第二有効信号を比較手段49に出力する。
比較手段49は、在荷センサ6から入力手段50を介して受ける在荷検知信号が搬送物の無いことを示すものである場合は、安定時間検出手段48から第一有効信号を受けたたとき、電流/トルク変換手段63から引き渡されたデータ(現在トルク値)と、初期設定値記憶手段52から引き渡された無負荷時正常トルク値MS0の比較演算を行う。
そして、現在トルク値が、無負荷時正常トルク値MS0を含む許容トルク範囲(無負荷時正常トルク値MS0に所定割合k%の許容差を加減した範囲)の値の場合(図6に示すm0の場合)は、正常を示すデータ(正常データ)を入力手段50に引き渡す。
すなわち、図6に示すように、安定時間検出手段48におけるタイマTM1(第一有効信号)が“ON”になること、在荷検知信号が“在荷無”であること、及び、現在トルク値が許容トルク範囲に含まれるm0であることをAND条件として、“正常”の判定がなされることになる。
また、現在トルク値が、無負荷時許容最大トルク値(無負荷時正常トルク値MS0に所定割合k%の許容差を加えた値)より大きい場合(図6に示すm0hの場合)は、駆動系の異常として、特に、モータ5の装置寿命が近づいていることを示す異常データ(異常データ1)を入力手段50に引き渡す。
すなわち、図6に示すように、安定時間検出手段48におけるタイマTM1(第一有効信号)が“ON”になること、自ゾーンの在荷検知信号が“在荷無”であること、及び、現在トルク値が無負荷時許容最大トルク値より大きいm0hであることをAND条件として、“異常1”の判定がなされることになる。
モータ5の軸受けや潤滑油などの機構部品などの損耗などによりモータ5の内部にトルクロスが生じると、モータ電流Idが大きくなる。そのため、無負荷安定状態における現在トルク値が、無負荷時許容最大トルク値よりも大きい値(図6におけるm0h)であれば、機構部品が損耗しモータ5の装置寿命が近づいていることを意味する。
一方、現在トルク値が、無負荷時許容最小トルク値(無負荷時正常トルク値から所定割合k%の許容差を引いた値)より小さい場合(図6に示すm0lの場合)は、駆動系の異常として、特に、ローラ7の空転やベルトのスリップを示す異常データ(異常データ2)を入力手段50に引き渡す。
すなわち、図6に示すように、安定時間検出手段48におけるタイマTM1(第一有効信号)が“ON”になること、自ゾーンの在荷検知信号が“在荷無”であること、及び、現在トルク値が無負荷時許容最小トルク値より小さいm0lであることをAND条件として、“異常2”の判定がなされることになる。
モータ5の回転軸からローラ7が脱落した場合や、ローラ7に連動して荷物を送るベルトがローラ7から脱落した場合は、モータ5にかかる負荷が小さくなる。そのため、無負荷安定状態における現在トルク値が、無負荷時許容最大トルク値(無負荷時正常トルク値に所定割合k%の許容差を加えた値)より小さい値(図6に示すm0lの場合)であれば、ローラ7が空転し、或いは、ベルトがスリップしていることを意味する。
比較手段49は、更に、在荷センサ6から入力手段50を介して受ける在荷検知信号が搬送物の有ることを示すもの(在荷有)である場合は、安定時間検出手段48から第二有効信号を受けたとき、電流/トルク変換手段63から引き渡されたデータ(現在トルク値)と、初期設定値記憶手段52から引き渡された許容最大トルク値との比較演算を行う。
そして、現在トルク値が、許容最大トルク値より大きい場合(図6に示すn0hの場合)は、荷物重量が超過していること(過重量)を示す異常データ(異常データ3)を入力手段50に引き渡す。
すなわち、図6に示すように、安定時間検出手段48におけるタイマTM2(第二有効信号)が“ON”になること、自ゾーンの在荷検知信号が“在荷有”であること、及び、現在トルク値が許容最大トルク値NS0+j%より大きいn0hであることをAND条件として、“異常3”の判定がなされることになる。
入力手段50は、比較手段49から引き渡された正常データ、異常データ1、異常データ2、異常データ3を監視データ送信手段46に引き渡す。また、在荷センサ6から入力された在荷検知信号の内容に基づき、在荷有無データ(SLn)を監視データ送信手段46に引き渡す。更に、サーモプロテクタ9から、モータ5が高温の状態になったときに出力される異常検知信号を受けたとき、異常データ4を監視データ送信手段46に引き渡す。
監視データ送信手段46に引き渡されたデータは、既述のように、監視信号として伝送手順の監視データ領域に重畳される。
なお、サーモプロテクタ9から出力される異常検知信号は、モータ駆動手段55にも入力される。そして、異常検知信号を受けたモータ駆動手段55は、モータ5を緊急停止させる。
初期設定スイッチSWnは、比較手段49において比較判定処理に用いられる正常トルク値を設定するときに使用する。システムの使用開始前、モータ5の交換後、或いはベルトの交換後などは、駆動系が正常であることは明らかであるため、そのときのトルク値は正常トルク値である。そこで、現在トルク値が正常トルク値となることが明からなときの現在トルク値を、正常トルク値として設定する場合に、初期設定スイッチSWnを“ON”とする。
初期設定スイッチSWnが“ON”とされたとき、初期設定値指示手段51は、初期設定値記憶手段52にON信号を出力する。
初期設定値記憶手段52は、在荷センサ6から入力手段50を介して受ける在荷検知信号が搬送物の無いことを示すもの(在荷無)である場合は、初期設定値指示手段51からのON信号を受けたときにトルク検出手段60から引き渡された現在トルク値を、無負荷時正常トルク値MS0として記憶する。
一方、在荷センサ6から入力手段50を介して受ける在荷検知信号が搬送物の有ることを示すもの(在荷有)である場合は、初期設定値指示手段51からのON信号を受けたときにトルク検出手段60から引き渡された現在トルク値に所定割合j%の許容差を加えて得られた値を、許容最大トルク値WS0+j%として記憶する。
なお、許容最大トルク値を設定する際に初期設定スイッチSWnを“ON”とするタイミングは、自ゾーンの搬送路に標準的な重量の物品が載せられたときとする。標準的な重量の物品であることの判断は、利用者が行う。
初期設定値指示手段51からON信号を受けていないとき、すなわち、通常運転時における初期設定値記憶手段52は、在荷検知信号が搬送物の無いことを示すもの(在荷無)である場合に無負荷時正常トルク値MS0を、在荷検知信号が搬送物の有ることを示すもの(在荷有)である場合に許容最大トルク値WS0+j%を、比較手段49に引き渡す。
無負荷時正常トルク値MS0と許容最大トルク値WS0+j%の初期設定は、親局2を介して行ってもよく、その場合、無負荷時正常トルク値MS0と許容最大トルク値WS0+j%は、既述の通り、ダウンロードデータとして、制御データ領域を利用して送信される。
また、無負荷時正常トルク値MS0と許容最大トルク値WS0+j%の初期設定を、親局2を介して行う場合、子局入出力部40は、図3において想像線で示す自ゾーンDLデータ抽出手段56を備えるものとする。
自ゾーンDLデータ抽出手段56は、自ゾーン制御データ抽出手段44がアドレス抽出手段42から伝送受信信号を受けるタイミングと同じタイミングで、自ゾーン制御データ抽出手段44と同様にアドレス抽出手段42から伝送受信信号を受ける。
そして、伝送受信信号から無負荷時正常トルク値MS0および許容最大トルク値WS0+j%を抽出し、所定の手順で初期設定値記憶手段52に引き渡す。
自ゾーンDLデータ抽出手段56から初期設定値記憶手段52に引き渡された無負荷時正常トルク値MS0および許容最大トルク値WS0+j%は、初期設定スイッチSWnを介して設定された場合と同様に、初期設定値記憶手段52から比較手段49に引き渡される。
なお、無負荷時正常トルク値MS0および許容最大トルク値WS0+j%の設定に際し、初期設定スイッチSWnによる設定と、親局2からのダウンロードを併用してもよい。
その場合は、任意のゾーンにおいて初期設定スイッチSWnを介して初期設定を行い、そこで設定された無負荷時正常トルク値MS0および許容最大トルク値WS0+j%を、親局2を介してアップロードする。そして、アップロードしたデータを制御部1の記憶部に記憶させ、親局2を介して仕様の同じゾーンの子局4の各々に送信する。モータ5やローラ7の構成が共通した同じ仕様のゾーンが多く存在する場合には、全てのゾーン毎に設定値を設定する場合と比較し、設定作業に要する手間や時間を削減することができる。
また、各ゾーンにおいて、初期設定スイッチSWnを介して設定された無負荷時正常トルク値MS0および許容最大トルク値WS0+j%を、その都度、親局2を介してアップロードし、これら個々のデータを制御部1の記憶部に記憶させ、これらのデータをシステム起動時に、親局2を介して子局4の各々に、一括して送信することとしてもよい。
なお、この実施形態において親局2および複数の子局4は、共通データ信号線DP、DNで接続されているが、データ信号の送受信が可能であれば、接続の手法に制限はない。例えば、無線接続としてもよい。
1 制御部
2 親局
4 子局
5 モータ
6 在荷センサ
7 ローラ
8 DC電源
9 サーモプロテクタ
11 管理判断手段
12 入出力ユニット
21 出力データ部
22 管理データ部
23 タイミング発生部
24 親局出力部
25 親局入力部
26 入力データ部
29 記憶手段
31 OSC(発振回路)
32 タイミング発生手段
33 制御データ発生手段
34 ラインドライバ
35 監視信号検出手段
36 監視データ抽出手段
40 子局入出力部
41 伝送受信手段
42 アドレス抽出手段
43 自局アドレス設定手段
44 自ゾーン制御データ抽出手段
45 前ゾーン監視データ抽出手段
46 監視データ送信手段
47 動作手段
48 安定時間検出手段
49 比較手段
50 入力手段
51 初期設定値指示手段
52 初期設定値記憶手段
53 子局ラインレシーバ
54 子局ラインドライバ
55 モータ駆動手段
56 自ゾーンDLデータ抽出手段
60 トルク検出手段
61 アンプ
62 A/D変換手段
63 電流/トルク変換手段
SWn 初期設定スイッチ
2 親局
4 子局
5 モータ
6 在荷センサ
7 ローラ
8 DC電源
9 サーモプロテクタ
11 管理判断手段
12 入出力ユニット
21 出力データ部
22 管理データ部
23 タイミング発生部
24 親局出力部
25 親局入力部
26 入力データ部
29 記憶手段
31 OSC(発振回路)
32 タイミング発生手段
33 制御データ発生手段
34 ラインドライバ
35 監視信号検出手段
36 監視データ抽出手段
40 子局入出力部
41 伝送受信手段
42 アドレス抽出手段
43 自局アドレス設定手段
44 自ゾーン制御データ抽出手段
45 前ゾーン監視データ抽出手段
46 監視データ送信手段
47 動作手段
48 安定時間検出手段
49 比較手段
50 入力手段
51 初期設定値指示手段
52 初期設定値記憶手段
53 子局ラインレシーバ
54 子局ラインドライバ
55 モータ駆動手段
56 自ゾーンDLデータ抽出手段
60 トルク検出手段
61 アンプ
62 A/D変換手段
63 電流/トルク変換手段
SWn 初期設定スイッチ
Claims (4)
- 搬送方向に並んで設けられた複数のゾーンに分割された搬送路を備え、
前記複数のゾーンの各々に、前記搬送路の駆動手段と、搬送物の有無を検出する在荷センサと、前記駆動手段の出力トルクに応じて変化する電気信号を得る検出手段と、前記電気信号の値に基づいて得られた算出値と所定の設定値との比較演算を行う演算処理手段が配置され、
前記演算処理手段は、前記演算処理手段が配置されている自ゾーンの上流側の前ゾーンに配置された前記在荷センサの情報を取得して、搬送対象物が前記前ゾーンに進入したときに前記自ゾーンに配置された前記駆動手段を動作させ、前記前ゾーンに在荷が有り、前記自ゾーンに在荷が無いときに、前記比較演算により、駆動系の異常の有無を判定し、前記自ゾーンに在荷があるときに、前記比較演算により、過重量の有無を判定することを特徴とする搬送システム。 - 前記設定値は、前記検出手段により得られた前記電気信号に基づいて、前記演算処理手段において設定される請求項1に記載の搬送システム。
- 前記複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、前記子局は、前記演算処理手段を備え、前記設定値は、前記データ信号の送受信が可能な状態で前記複数の子局と接続された親局から、前記子局の各々に送信される請求項1又は2に記載の搬送システム。
- 前記複数のゾーンの各々に、データ信号の送受信が可能な状態で接続された複数の子局の各々が配置され、前記子局は、前記演算処理手段を備え、前記自ゾーンに配置された前記在荷センサの情報を前記データ信号として出力し、前記前ゾーンに配置された前記在荷センサの情報を前記データ信号を介して取得する請求項1に記載の搬送システム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017505769A JP6211230B2 (ja) | 2015-03-13 | 2015-03-13 | 搬送システム |
| PCT/JP2015/057492 WO2016147254A1 (ja) | 2015-03-13 | 2015-03-13 | 搬送システム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/057492 WO2016147254A1 (ja) | 2015-03-13 | 2015-03-13 | 搬送システム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016147254A1 true WO2016147254A1 (ja) | 2016-09-22 |
Family
ID=56918711
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/057492 WO2016147254A1 (ja) | 2015-03-13 | 2015-03-13 | 搬送システム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6211230B2 (ja) |
| WO (1) | WO2016147254A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020203476A1 (ja) * | 2019-04-05 | 2020-10-08 | 伊東電機株式会社 | コンベヤシステム、異常診断装置、異常診断プログラム、及び異常診断プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| EP3812861A1 (en) * | 2019-10-25 | 2021-04-28 | Itoh Denki Co., Ltd. | Conveyor system |
| JP2021121562A (ja) * | 2020-01-31 | 2021-08-26 | 三菱パワー株式会社 | 供給システムの制御装置、これを備える供給システム、及びその制御方法並びに制御プログラム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003292140A (ja) * | 2002-03-29 | 2003-10-15 | Okura Yusoki Co Ltd | コンベヤ装置 |
| JP2009286597A (ja) * | 2008-05-30 | 2009-12-10 | Ito Denki Kk | コンベア装置 |
| JP2013199359A (ja) * | 2012-03-26 | 2013-10-03 | Ito Denki Kk | コンベア装置、並びに、ゾーンコントローラ |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8887897B2 (en) * | 2010-08-31 | 2014-11-18 | Itoh Denki Co., Ltd. | Fault diagnosis method for roller conveyor, roller conveyor, and controller for conveyor |
-
2015
- 2015-03-13 JP JP2017505769A patent/JP6211230B2/ja active Active
- 2015-03-13 WO PCT/JP2015/057492 patent/WO2016147254A1/ja active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003292140A (ja) * | 2002-03-29 | 2003-10-15 | Okura Yusoki Co Ltd | コンベヤ装置 |
| JP2009286597A (ja) * | 2008-05-30 | 2009-12-10 | Ito Denki Kk | コンベア装置 |
| JP2013199359A (ja) * | 2012-03-26 | 2013-10-03 | Ito Denki Kk | コンベア装置、並びに、ゾーンコントローラ |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020203476A1 (ja) * | 2019-04-05 | 2020-10-08 | 伊東電機株式会社 | コンベヤシステム、異常診断装置、異常診断プログラム、及び異常診断プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| EP3812861A1 (en) * | 2019-10-25 | 2021-04-28 | Itoh Denki Co., Ltd. | Conveyor system |
| JP2021121562A (ja) * | 2020-01-31 | 2021-08-26 | 三菱パワー株式会社 | 供給システムの制御装置、これを備える供給システム、及びその制御方法並びに制御プログラム |
| JP7504604B2 (ja) | 2020-01-31 | 2024-06-24 | 三菱重工業株式会社 | 供給システムの制御装置、これを備える供給システム、及びその制御方法並びに制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016147254A1 (ja) | 2017-11-30 |
| JP6211230B2 (ja) | 2017-10-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105189318B (zh) | 辊式输送装置、控制器和机械装置的异常检测方法 | |
| US8887897B2 (en) | Fault diagnosis method for roller conveyor, roller conveyor, and controller for conveyor | |
| JP6211230B2 (ja) | 搬送システム | |
| JP4122392B2 (ja) | ゾーンコントローラ | |
| US6860381B2 (en) | Decentralized drive system for a conveyor | |
| EP2829496B1 (en) | Zone controller and conveyor device | |
| JP4979658B2 (ja) | 搬送制御システム及び搬送制御方法 | |
| US11420825B2 (en) | Method for monitoring the state of a conveyor system, and control unit, motorized roller, and conveyor system for carrying out the method | |
| JP2013199359A (ja) | コンベア装置、並びに、ゾーンコントローラ | |
| WO2017037774A1 (ja) | 搬送システム | |
| CN208802493U (zh) | 货物运送装置 | |
| JP2019189386A (ja) | 制御装置及びコンベヤ | |
| WO2014147705A1 (ja) | 制御・監視信号伝送システム | |
| US20020038753A1 (en) | Apparatus and method for controlling segmented conveyor system | |
| JP2018177441A (ja) | ローラコンベア装置 | |
| US20060289279A1 (en) | Conveyor loading zone system and method | |
| KR20110016785A (ko) | 컨베이어 장치 및 그에 따른 컨베이어 시스템 | |
| JP6943064B2 (ja) | 制御装置、制御システム、方法及びプログラム | |
| TWI608321B (zh) | 控制裝置 | |
| JP5456999B2 (ja) | ベルト支持ローラモニタリングシステム | |
| JP2013203532A (ja) | 搬送装置、並びに、物品保管装置 | |
| JP2009259040A (ja) | 制御システム | |
| JP5388941B2 (ja) | 制御・監視信号伝送システムにおける始動制御方式 | |
| JP2002240926A (ja) | ローラーコンベア及びローラーコンベアの制御方法 | |
| JPWO2013108392A1 (ja) | 伝送クロック信号異常検出方式、およびその方式に使用する子局ターミナル |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15885352 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017505769 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15885352 Country of ref document: EP Kind code of ref document: A1 |