WO2016129623A1 - Robot articulé mettant en œuvre un dispositif de fonctionnement de liaison - Google Patents
Robot articulé mettant en œuvre un dispositif de fonctionnement de liaison Download PDFInfo
- Publication number
- WO2016129623A1 WO2016129623A1 PCT/JP2016/053901 JP2016053901W WO2016129623A1 WO 2016129623 A1 WO2016129623 A1 WO 2016129623A1 JP 2016053901 W JP2016053901 W JP 2016053901W WO 2016129623 A1 WO2016129623 A1 WO 2016129623A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- link
- end side
- arm
- joint
- proximal
- Prior art date
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
Abstract
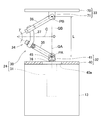
Le robot articulé (1) de l'invention possède une unité de base (2) et un bras articulé (3). Le bras articulé (3) est tel qu'une pluralité de parties bras (11 à 14) est rangée en série du côté extrémité de base vers le côté extrémité avant, et l'unité de base (2) avec la partie bras (11) du côté le plus à l'extrémité de base, ainsi que les parties bras (11 à 14) adjacentes entre elles sont raccordées individuellement par l'intermédiaire de parties joint (21 à 24), et de manière à permettre un déplacement relatif entre elles. Un organe effecteur (4) est monté sur la partie bras (14) du côté le plus à l'extrémité avant. Au moins une partie joint (24) est constituée par le dispositif de fonctionnement de liaison qui met en rotation relative les parties bras (13, 14) des deux côtés de la partie joint (24) entre elles autour de deux axes perpendiculaires entre eux, et au moins une partie joint (23) est constituée par un mécanisme à mouvement linéaire déplaçant de manière relative les parties bras (12, 13) des deux côtés l'une par rapport à l'autre dans la direction d'une droite.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015025926A JP6576646B2 (ja) | 2015-02-13 | 2015-02-13 | リンク作動装置を用いた多関節ロボット |
| JP2015-025926 | 2015-02-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016129623A1 true WO2016129623A1 (fr) | 2016-08-18 |
Family
ID=56614673
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/053901 WO2016129623A1 (fr) | 2015-02-13 | 2016-02-10 | Robot articulé mettant en œuvre un dispositif de fonctionnement de liaison |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6576646B2 (fr) |
| WO (1) | WO2016129623A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112739506A (zh) * | 2018-09-28 | 2021-04-30 | Ntn株式会社 | 连杆促动装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018075689A (ja) | 2016-11-11 | 2018-05-17 | Ntn株式会社 | 作動装置および双腕型作動装置 |
| JP2018167350A (ja) * | 2017-03-29 | 2018-11-01 | Ntn株式会社 | 多関節ロボット |
| JP2019063902A (ja) * | 2017-09-29 | 2019-04-25 | Ntn株式会社 | 多関節ロボットおよびその操作方法 |
| JP7192016B2 (ja) * | 2021-03-25 | 2022-12-19 | Ntn株式会社 | 球面リンク機構および球面リンク作動装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60249588A (ja) * | 1984-05-24 | 1985-12-10 | 住友電気工業株式会社 | 位置決め機構 |
| JPH09314305A (ja) * | 1996-05-31 | 1997-12-09 | Ube Ind Ltd | 金型スプレイロボット |
| JPH10118971A (ja) * | 1996-10-16 | 1998-05-12 | Ricoh Co Ltd | マニプレータ |
| WO2013190639A1 (fr) * | 2012-06-19 | 2013-12-27 | 株式会社安川電機 | Système robotique et procédé de fabrication de biens traités |
| WO2014185373A1 (fr) * | 2013-05-16 | 2014-11-20 | Ntn株式会社 | Dispositif d'actionnement de liaison |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4762455A (en) * | 1987-06-01 | 1988-08-09 | Remote Technology Corporation | Remote manipulator |
| JP2000130536A (ja) * | 1998-10-27 | 2000-05-12 | Fanuc Ltd | パラレルリンク機構 |
| JP5682642B2 (ja) * | 2013-03-05 | 2015-03-11 | 株式会社安川電機 | パラレルリンクロボット |
-
2015
- 2015-02-13 JP JP2015025926A patent/JP6576646B2/ja active Active
-
2016
- 2016-02-10 WO PCT/JP2016/053901 patent/WO2016129623A1/fr active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60249588A (ja) * | 1984-05-24 | 1985-12-10 | 住友電気工業株式会社 | 位置決め機構 |
| JPH09314305A (ja) * | 1996-05-31 | 1997-12-09 | Ube Ind Ltd | 金型スプレイロボット |
| JPH10118971A (ja) * | 1996-10-16 | 1998-05-12 | Ricoh Co Ltd | マニプレータ |
| WO2013190639A1 (fr) * | 2012-06-19 | 2013-12-27 | 株式会社安川電機 | Système robotique et procédé de fabrication de biens traités |
| WO2014185373A1 (fr) * | 2013-05-16 | 2014-11-20 | Ntn株式会社 | Dispositif d'actionnement de liaison |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112739506A (zh) * | 2018-09-28 | 2021-04-30 | Ntn株式会社 | 连杆促动装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6576646B2 (ja) | 2019-09-18 |
| JP2016147350A (ja) | 2016-08-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2016129624A1 (fr) | Robot articulé mettant en œuvre un dispositif de fonctionnement de liaison | |
| WO2016129623A1 (fr) | Robot articulé mettant en œuvre un dispositif de fonctionnement de liaison | |
| EP3446836B1 (fr) | Dispositif de travail et dispositif de travail à double bras | |
| JP5951224B2 (ja) | リンク作動装置の原点位置初期設定方法およびリンク作動装置 | |
| JP2022122889A (ja) | 外科用ロボットアーム | |
| JP6883073B2 (ja) | リンク作動装置を用いた多関節ロボット | |
| JP6625322B2 (ja) | リンク作動装置 | |
| JP7022008B2 (ja) | リンク作動装置 | |
| US20160361816A1 (en) | Device and method for controlling link actuation device | |
| US11420322B2 (en) | Working device and double-arm type working device | |
| JP6602620B2 (ja) | 組合せ型リンク作動装置 | |
| WO2016021099A1 (fr) | Robot à tringles parallèles et structure à tringles parallèles | |
| WO2018181040A1 (fr) | Robot articulé | |
| US20190291268A1 (en) | Arm structure of robot and robot | |
| US11130225B2 (en) | Working device and double-arm type working device | |
| WO2016084685A1 (fr) | Appareil de travail employant un mécanisme de liaison parallèle | |
| WO2018088446A1 (fr) | Dispositif de travail et dispositif de travail du type à deux bras | |
| WO2016035564A1 (fr) | Dispositif d'actionnement de tringles | |
| JP2016153159A (ja) | パラレルリンク機構を用いた作業装置 | |
| JP6792687B2 (ja) | リンク作動装置 | |
| WO2023054057A1 (fr) | Mécanisme de liaison parallèle et dispositif d'actionnement de liaison | |
| JP2018167365A (ja) | ロボットアーム | |
| WO2016080472A1 (fr) | Dispositif de travail utilisant un mécanisme à liaisons parallèles | |
| CN118019624A (en) | Parallel link mechanism and link actuating device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16749266 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16749266 Country of ref document: EP Kind code of ref document: A1 |