WO2015111560A1 - 内視鏡装置及び内視鏡装置の作動方法 - Google Patents
内視鏡装置及び内視鏡装置の作動方法 Download PDFInfo
- Publication number
- WO2015111560A1 WO2015111560A1 PCT/JP2015/051305 JP2015051305W WO2015111560A1 WO 2015111560 A1 WO2015111560 A1 WO 2015111560A1 JP 2015051305 W JP2015051305 W JP 2015051305W WO 2015111560 A1 WO2015111560 A1 WO 2015111560A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- mist
- value
- evaluation value
- focus
- evaluation
- Prior art date
Links
Images









Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00006—Operational features of endoscopes characterised by electronic signal processing of control signals
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000094—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope extracting biological structures
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00002—Operational features of endoscopes
- A61B1/00004—Operational features of endoscopes characterised by electronic signal processing
- A61B1/00009—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope
- A61B1/000095—Operational features of endoscopes characterised by electronic signal processing of image signals during a use of endoscope for image enhancement
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00163—Optical arrangements
- A61B1/00188—Optical arrangements with focusing or zooming features
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/12—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements
- A61B1/127—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with cooling or rinsing arrangements with means for preventing fogging
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2423—Optical details of the distal end
- G02B23/243—Objectives for endoscopes
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2446—Optical details of the image relay
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2453—Optical details of the proximal end
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/28—Systems for automatic generation of focusing signals
- G02B7/36—Systems for automatic generation of focusing signals using image sharpness techniques, e.g. image processing techniques for generating autofocus signals
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B13/00—Viewfinders; Focusing aids for cameras; Means for focusing for cameras; Autofocus systems for cameras
- G03B13/32—Means for focusing
- G03B13/34—Power focusing
- G03B13/36—Autofocus systems
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0012—Biomedical image inspection
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/67—Focus control based on electronic image sensor signals
- H04N23/673—Focus control based on electronic image sensor signals based on contrast or high frequency components of image signals, e.g. hill climbing method
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/70—Circuitry for compensating brightness variation in the scene
- H04N23/74—Circuitry for compensating brightness variation in the scene by influencing the scene brightness using illuminating means
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
- G02B23/2407—Optical details
- G02B23/2461—Illumination
- G02B23/2469—Illumination using optical fibres
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/555—Constructional details for picking-up images in sites, inaccessible due to their dimensions or hazardous conditions, e.g. endoscopes or borescopes
Definitions
- execution of focusing operation in focus control is stopped when occurrence of mist is detected.
- the focusing operation can be stopped when the mist that may cause the focus control to malfunction is generated, and the in-focus state can be maintained even when the mist is generated.
- the focus control is performed by controlling the position of the focus lens of the optical system of the imaging unit, the occurrence of mist is detected, and the occurrence of the mist is detected.
- the present invention relates to a method of operating the endoscope apparatus for stopping the execution of the focusing operation in
- the user fixes the field of view and performs the treatment, but if the focus changes during the treatment, the treatment is disturbed. Therefore, after the focusing is completed once in the fixed field of view, the focusing operation is stopped in order to prevent the occurrence of blurring or the like of the image due to a change in the focus position unintended by the user or a malfunction in AF control. Is desirable.
- mist may be generated in the visual field for the following reasons, and there is a problem that the focus position may be shifted by the mist.
- Patent Document 1 and Patent Document 2 described above as techniques for suppressing unnecessary AF operation, since these techniques do not assume mist, it is necessary to accurately suppress AF operation with respect to generation of mist. Can not. Therefore, it is difficult to stop the focusing operation while the user is performing treatment.
- the endoscope apparatus 10 includes a focus control unit 360 that performs focus control by controlling the position of a focus lens of the optical system of the imaging unit 200, and a mist detection unit 340 that detects the generation of mist. Then, when the mist detection unit 340 detects the generation of mist, the focus control unit 360 stops the execution of the focusing operation in the focus control.
- mist when mist is generated, parameters such as the luminance value, saturation value, and contrast value of the image temporally change.
- the occurrence of mist can be detected by detecting from.
- the generation of the mist may be detected not only from the image but also by combining control information (for example, an energized state) of the treatment tool that generates the mist.
- focus control generally means control of the position of the focus lens including control to keep the focus lens stopped, and an operation of focusing on the object in the focus control is called focusing operation.
- focus control unit 360 stops the movement of the focus lens to fix the focus position.
- FIG. 2 shows a configuration example of the endoscope apparatus according to the first embodiment.
- the endoscope apparatus includes a rigid endoscope 100 as an insertion unit into the body, an imaging unit 200 connected to the rigid endoscope 100, a processing unit 300, a display unit 400, an external I / F unit 500, and a light source unit. Including 600.
- the processing unit 300 includes an A / D conversion unit 310, a preprocessing unit 320, an image processing unit 330, a focus control unit 360, a control unit 350, and a mist detection unit 340.
- the mist detection unit 340 detects the generation of mist and the disappearance of the mist based on the image from the pre-processing unit 320.
- the focus control unit 360 controls the focus lens drive unit 230 based on the image from the pre-processing unit 320 to control a focusing operation for focusing on the subject.
- the focus control unit 360 stops or restarts the focusing operation when the generation of the mist or the disappearance of the mist is detected. Details of the mist detection unit 340 and the focus control unit 360 will be described later.
- the control unit 350 is mutually connected to each part of the endoscope apparatus such as the external I / F unit 500, the image processing unit 330, the focus control unit 360, the imaging device 260, the zoom button 210, etc. Control signal input / output.
- the mist detection area setting unit 341 sets a mist detection area as shown in FIG. 4 based on information such as the image size output from the control unit 350, for example. Thereafter, the mist detection area setting unit 341 outputs the set mist detection area information to the detection unit 342. For example, the image is divided into 3 ⁇ 3 areas, nine evaluation blocks are set, and a set of these is set as a mist detection area. It goes without saying that the number of evaluation blocks set as the mist detection area can be arbitrarily set here.
- the detection unit 342 detects mist based on the mist detection area information output from the mist detection area setting unit 341 and the images sequentially output from the pre-processing unit 320. Thereafter, the detection unit 342 outputs mist detection information indicating whether or not mist is detected to the focus lens control unit 363. Details of the mist detection method will be described later.
- the AF area setting unit 361 sets an AF area as shown in FIG. 4 based on information such as the image size output from the control unit 350, for example. Thereafter, the AF area setting unit 361 outputs the set AF area information to the AF evaluation value calculation unit 362.
- the same area as the central evaluation block is set as the AF area in order to simplify the description.
- an area having a size completely different from that of the evaluation block may be set as the AF area near the center of the image.
- the AF evaluation value calculation unit 362 calculates an AF evaluation value based on the AF area information output from the AF area setting unit 361 and the images sequentially output from the preprocessing unit 320. For example, Y signals of all the pixels included in the AF area are calculated, arbitrary BPF (band pass filter) processing is performed on the Y signals, and a sum of outputs of the BFP processing is set as an AF evaluation value. Thereafter, the AF evaluation value calculation unit 362 sequentially outputs the calculated AF evaluation values to the focus lens control unit 363.
- the focus lens control unit 363 generates control information of the focus lens based on the mist detection information output from the detection unit 342 and the AF evaluation value output from the AF evaluation value calculation unit 362, and the focus lens drive unit 230 Output.
- the focus lens drive unit 230 drives the focus lens based on the control information output from the focus lens control unit 363.
- step S104 When it is determined in step S104 that the mist is generated and the focusing operation is ended, the focus lens control unit 363 starts the standby operation.
- the focus lens control unit 363 acquires mist detection information output from the detection unit 342 (step S201).
- the focus lens control unit 363 detects whether or not the mist has disappeared based on the mist detection information (step S202). If it is determined that the mist has not disappeared, the operations after step S201 are repeated. On the other hand, when it is determined that the mist has disappeared, the standby operation is ended.
- the change in the image is different from that near the center of the image when mist occurs. That is, while the user is performing treatment, the visual field is fixed so that the lesion site is located near the center of the image, and the lesion site near the center is treated. No treatment is performed, and mist does not occur near the periphery of the image. Therefore, when mist occurs near the center, the change in the image near the periphery is relatively small until the mist reaches the periphery.
- Vy [n] is calculated from the average luminance of each evaluation block calculated from the current image (time n) and an image acquired in the past by x It is calculated as the sum of the differences with the average luminance of each evaluation block.
- Vs [n] is the sum of the difference between the average saturation of each evaluation block calculated from the current image (time n) and the average saturation of each evaluation block calculated from an image acquired in the past by x It is calculated as Furthermore, Vd [n] is calculated as the sum of the difference between the D range of each evaluation block calculated from the current image (time n) and the D range of each evaluation block calculated from an image acquired in the past by x It is done.
- the detection unit 342 detects the time when the evaluation value Vy [n] of the luminance value becomes the minimum value Min ⁇ Vy ⁇ under the condition smaller than the first predetermined threshold Th1_Vy, and the evaluation value Vs [n] of the saturation value.
- the AF control can be stopped as soon as possible at that point, and the focus lens can be fixed. This has the advantage that the possibility of a malfunction in AF control can be prevented in advance.
- the time change of the parameter occurs when the mist occurs or disappears, by using the time change, it is possible to determine that the mist occurs at an early stage after the mist actually occurs. Alternatively, it can be determined that the mist has disappeared when the mist has sufficiently disappeared.
- AF control is performed and a state in which the region under treatment is in focus is maintained.
- the AF control is stopped only while the normal AF control can not be performed by the mist, and the state returns to the state where the normal AF control can be performed. AF control can be resumed.
- the in-focus state can be maintained regardless of the presence or absence of the mist, and the convenience for the user is improved.
- the detection unit 342 calculates the Y signal Y ′ [n] and the color signal C ′ [n] by the following equations (10) and (11) using the result of the BPF processing and the light adjustment correction amount.
- Y [n] and C [n] are output signals from the preprocessing unit 320 to the detection unit 342. That is, Y [n] is a Y signal of the image, and C [n] is a Cr signal or a Cb signal of the image.
- Bpf (Y [n]) and Bpf (C [n]) are output signals from the AF evaluation value calculator 362 to the detector 342. That is, Bpf ⁇ Y [n] ⁇ is the result of the BPF processing of the Y signal, and is a Y signal of the band AfBd shown in FIG.
- Bpf ⁇ C [n] ⁇ is the result of the BPF processing of the color signal, and is a color signal of the band AfBd shown in FIG.
- LC is a light control correction amount, and the value is larger as the light amount is larger.
- the Y signal Y '[n] and the color signal C' [n] become signals in the low frequency and high frequency band MistBd shown in FIG.
- the detection unit 342 calculates an evaluation value from these signals. As described above, since the evaluation value is averaged in each evaluation block (or all evaluation blocks), the high frequency (thick dotted line in FIG. 15) component in the band MistBd is substantially cut, and the low frequency (thick solid line) Only the ingredients of remain.
- the configuration is not limited to this, and the configuration in which the detection unit 342 performs low pass filter processing is used. For example, similar effects can be obtained.
- the focus lens control unit 363 sets the position of the focus lens at the time when the energization state of the electric knife or the ultrasonic knife is closest to the past and the time closest to time n at which the generation of mist is detected. It is read from the focus lens position recording unit 364. Then, when the occurrence of mist is detected and the focusing operation is stopped, the focus lens is moved to the position of the read focus lens.
- mist generation time when it is set as the mist generation time when the time when the electrification state of the electric knife or the ultrasonic knife becomes ON is set as the mist generation time, the mist disappearance time can not be detected when the mist does not occur, and the time to restart AF control Can not be identified.
- This problem can be solved by performing processing for detecting mist generation as an image as in the first embodiment after the energization state of the electric knife or the ultrasonic knife is turned on.
- the spatial frequency of the mist is a low frequency
- the change in the mist can be efficiently detected by obtaining the mist evaluation value from the image of the low frequency band.
- the band for which the focus evaluation value is obtained is the most susceptible.
- by obtaining the mist evaluation value from a lower band image not overlapping the band for which the focus evaluation value is obtained it is possible to detect the generation and disappearance of mist without being affected by the focus fluctuation.
- the endoscope apparatus of the present embodiment includes a light amount control unit (control unit 350) that controls the light amount of the illumination emitted to the subject imaged by the imaging unit 200. Then, the mist detection unit 340 corrects the pixel value of the captured image based on the light amount of the illumination (the above equations (10), (11)), and detects the generation of mist based on the corrected pixel value. Determine the mist evaluation value for
- the focus lens when the focus control unit 360 stops the execution of the focusing operation in the focus control, the focus lens at a predetermined time before the timing when the mist detection unit 340 detects the generation of the mist. Move the focus lens to the position of.
- the treatment is started after the energization state is started, and the mist is generated at least after the treatment tool is turned on. Therefore, since mist does not occur at the time of turning on the power, by setting the focus lens position at that time, it is possible to stop the AF control in a state in which the area being treated is surely in focus.
- the processing unit 300 and the like of the embodiment described above may include a processor and a memory.
- the processor here may be, for example, a CPU (Central Processing Unit). However, the processor is not limited to a CPU, and various processors such as a graphics processing unit (GPU) or a digital signal processor (DSP) can be used.
- the processor may also be a hardware circuit based on an ASIC.
- the memory stores an instruction readable by a computer, and the instruction is executed by the processor, whereby each unit such as the processing unit 300 according to the present embodiment (for example, the preprocessing unit 320, the image processing unit 330, the mist detection unit 340, the control unit 350, the focus control unit 360, and the like are realized.
- 10 endoscope system 100 rigid scope, 110 lens system, 120 light guide unit, 200 imaging unit, 210 zoom button, 220 focus lens, 230 focus lens driver, 240 zoom lens, 250 zoom lens drive unit, 260 image sensor, 270 objective lens system, 300 processor, 310 A / D converter, 320 pre-processing unit, 330 image processing unit, 334 AF evaluation value calculation unit, 340 mist detection unit, 341 mist detection area setting unit, 342 detection unit, 346 focus lens position recording unit, 350 control unit, 360 focus control unit, 361 AF area setting unit, 362 AF evaluation value calculation unit, 363 focus lens control unit, 364 Focus lens position recording unit, 400 display unit, 500 external I / F unit, 600 light source unit, 610 white light source, 620 light guide cable
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Surgery (AREA)
- Optics & Photonics (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Medical Informatics (AREA)
- General Health & Medical Sciences (AREA)
- Radiology & Medical Imaging (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- Pathology (AREA)
- Biophysics (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Signal Processing (AREA)
- Astronomy & Astrophysics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Quality & Reliability (AREA)
- Theoretical Computer Science (AREA)
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Automatic Focus Adjustment (AREA)
- Studio Devices (AREA)
Abstract
内視鏡装置は、撮像部200の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行うフォーカス制御部360と、ミストの発生を検出するミスト検出部340と、を含む。フォーカス制御部360は、ミスト検出部340によりミストの発生が検出された場合、フォーカス制御における合焦動作の実行を停止する。
Description
本発明は、内視鏡装置及び内視鏡装置の作動方法等に関する。
内視鏡装置においてはユーザの診断・処置に支障をきたさないため、できるだけ広い被写界深度が求められる。しかし近年では、内視鏡装置においても高画素の撮像素子が使用されるに従って被写界深度が狭くなってきている。このことから、オートフォーカス(以下、AFと省略する)を行う内視鏡装置が提案されている。従来の動画に対するAF技術では、無駄な合焦動作を防止するため、以下のような手法が提案されている。
例えば特許文献1では、合焦動作が完了した状態におけるAF評価値を記憶し、そのAF評価値に対して所定の閾値以上の変化が所定の待機時間以上継続した場合に、再度、合焦動作を実行する。これにより、必要以上に高頻度に合焦動作が行われることを防止することができる。
或は特許文献2では、AF領域を画像の中央領域に配置し、合焦動作が完了した後に、現在画像と過去画像から、画像の周辺領域の類似度と画像の中央領域(AF領域)の類似度をそれぞれ算出する。ここでの類似度とは、画像が類似しているほど小さくなる値である。そして、画像の周辺領域の類似度が所定の閾値以上であり、画像の中央領域の類似度が所定の閾値以下の場合は合焦動作を行わせない。これにより、合焦後にフレーミングの変更等を行うことで画像の周辺領域の被写体が変化しても、画像の中央領域に位置する主要な被写体までの距離が変化しない場合には、不必要な合焦動作が行われることを防止することができる。
さて、内視鏡装置では、ユーザが処置を行うために視野を固定し、一度合焦が完了した後は、合焦動作を停止させておくことが望ましい。しかしながら、内視鏡装置の撮影範囲には種々の要因でミストが発生する可能性があり、ミストが発生するとコントラストが低下してAFが誤動作し、フォーカスが外れるという課題がある。
本発明の幾つかの態様によれば、ミストが発生した場合でも合焦状態を維持できる内視鏡装置及び内視鏡装置の作動方法等を提供できる。
本発明の一態様は、撮像部の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行うフォーカス制御部と、ミストの発生を検出するミスト検出部と、を含み、前記フォーカス制御部は、前記ミスト検出部により前記ミストの発生が検出された場合、前記フォーカス制御における合焦動作の実行を停止する内視鏡装置に関係する。
本発明の一態様によれば、ミストの発生が検出された場合にフォーカス制御における合焦動作の実行が停止される。これにより、フォーカス制御が誤動作を起こす可能性があるミストが発生した場合に合焦動作を停止することができ、ミストが発生した場合でも合焦状態を維持することが可能となる。
また、本発明の他の態様は、撮像部の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行い、ミストの発生を検出し、前記ミストの発生が検出された場合、前記フォーカス制御における合焦動作の実行を停止する内視鏡装置の作動方法に関係する。
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。
1.本実施形態の概要
例えば外科分野等において内視鏡装置(内視鏡システム)を用いて処置を行う場合、ユーザは病変部を画像の中央付近に位置させるようにスコープを操作し、電気メスや鉗子等の処置具を使用して病変部の切除や縫合等の処置を行う。このため、その処置を行う画像の中央付近にAF領域を配置することが望ましい。
例えば外科分野等において内視鏡装置(内視鏡システム)を用いて処置を行う場合、ユーザは病変部を画像の中央付近に位置させるようにスコープを操作し、電気メスや鉗子等の処置具を使用して病変部の切除や縫合等の処置を行う。このため、その処置を行う画像の中央付近にAF領域を配置することが望ましい。
また、ユーザは視野を固定して処置を行うが、処置の間にフォーカスが変化すると処置に支障をきたす。そのため、固定した視野に一度合焦が完了した後は、ユーザの意図しないピント位置の変化やAF制御の誤動作による画像のボケ等が発生することを防止するため、合焦動作を停止させておくことが望ましい。
しかしながら、以下のような理由で視野にミストが発生する場合があり、そのミストによりピント位置がずれる可能性があるという課題がある。
即ち、ユーザが処置を行っている間は、主要な被写体である病変部に対して電気メスや超音波メス等による切除や縫合等が行われる。電気メスが生体に接触するとメス先端の熱により病変部周辺を焼灼する事で灰や煙や水蒸気が発生して腹腔内に拡散する。また超音波メスの場合はキャビテーション(振動により水分中に気泡が発生する現象)により生体内の水分が腹腔内に霧状に拡散する現象が発生する。このような不透明な灰、煙、水蒸気、霧等が腹腔内に拡散する現象を、ミストと呼ぶ。
ユーザが処置を行っている間に上記のようなミストが発生すると、画像のコントラストが低下し、AF領域から取得されるAF評価値は時間と共に小さくなる(評価値が悪くなる)。そうすると、AF制御において合焦しているのか否かをAF評価値から判定できなくなる。このような状態になると、フォーカスレンズ位置が大きく移動して画像がぼけてしまう。更には、フォーカスレンズ位置の移動により倍率変動を引き起こしてしまう。このようなピントのぼけや倍率変動によって、視認性が極端に悪い画像を処置中のユーザに提供することになる。また、フォーカスレンズ位置が合焦位置から大きくずれてしまうと、ミストが消失して正常なAFを行える状態になったとしても、合焦するまでに時間がかかってしまう。
無駄なAF動作を抑制する技術として上述した特許文献1や特許文献2があるが、これらの技術はミストを想定したものではないので、ミストの発生に対して精度良くAF動作を抑制することはできない。そのため、ユーザが処置を行っている間に合焦動作を停止させることは困難である。
図1に、このような課題を解決できる本実施形態の内視鏡装置の構成例を示す。内視鏡装置10は、撮像部200の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行うフォーカス制御部360と、ミストの発生を検出するミスト検出部340と、を含む。そして、フォーカス制御部360は、ミスト検出部340によりミストの発生が検出された場合、フォーカス制御における合焦動作の実行を停止する。
例えば図7(A)~図10等で後述するように、ミストが発生するときに画像の輝度値や彩度値、コントラスト値等のパラメータが時間的に変化するので、そのパラメータの変化を画像から検出することにより、ミストの発生を検出できる。なお、ミストの発生を画像から検出するだけでなく、ミストを発生させる処置具の制御情報(例えば通電状態等)を組み合わせてミストの発生を検出してもよい。
また、合焦動作としては、例えばコントラスト法や、瞳分割位相差法、像面位相差法などを含む位相差法等を用いて自動的に被写体にフォーカスを合わせる動作(いわゆるAF制御)を行う。即ち、フォーカス制御は、フォーカスレンズを停止し続ける制御も含めてフォーカスレンズの位置の制御全般を意味しており、そのフォーカス制御のうち被写体にフォーカスを合わせる動作を合焦動作と呼ぶ。合焦動作の実行を停止したとき、フォーカス制御部360は、フォーカスレンズの移動を停止させてピントの位置を固定する。
以上のようにして、ミストの発生が検出された場合に合焦動作の実行を停止することで、ミストによるAFの誤動作を抑制することができる。即ち、ユーザが処置を行っている間は合焦動作を停止することが可能となり、ユーザが処置を行っている間の意図しないピント位置の変化や、AF制御の誤動作による画像のボケ等が発生することを防止できる。
2.第1の実施形態
2.1.内視鏡装置
次に、詳細な実施形態について説明する。図2に、第1の実施形態に係る内視鏡装置の構成例を示す。内視鏡装置は、体内への挿入部である硬性鏡100と、硬性鏡100に接続される撮像部200と、処理部300と、表示部400と、外部I/F部500と、光源部600を含む。
2.1.内視鏡装置
次に、詳細な実施形態について説明する。図2に、第1の実施形態に係る内視鏡装置の構成例を示す。内視鏡装置は、体内への挿入部である硬性鏡100と、硬性鏡100に接続される撮像部200と、処理部300と、表示部400と、外部I/F部500と、光源部600を含む。
光源部600は、白色光を発生する白色光源610と、白色光源610からの出射光を硬性鏡100に導光するライトガイドケーブル620と、を含む。
硬性鏡100は、例えば結像レンズとリレーレンズと接眼レンズ等を含んで構成されるレンズ系110と、ライトガイドケーブル620からの出射光を硬性鏡100の先端まで導光するライトガイド部120と、を含む。
撮像部200は、レンズ系110からの出射光を結像する対物レンズ系(光学系)270を含む。対物レンズ系270は、合焦物体位置を調整するフォーカスレンズ220と、光学倍率を調整するズームレンズ240と、を含んで構成されている。撮像部200は更に、対物レンズ系270で結像された反射光を光電変換して画像を生成する撮像素子260と、フォーカスレンズ220を駆動するフォーカスレンズ駆動部230と、ズームレンズ240を駆動するズームレンズ駆動部250と、ズームレンズ位置を調整するズームボタン210と、を含む。フォーカスレンズ駆動部230及びズームレンズ駆動部250は、例えばボイスコイルモーター(以下、VCM)で構成される。また、撮像素子260は、例えばベイヤ配列の色フィルタを有する固体撮像素子である。
ここで、合焦物体位置とは、被写体側においてフォーカスが合っている位置のことである。即ち、対物レンズ系270が結像した被写体が撮像素子260にフォーカスしている場合の、その被写体の位置である。合焦物体位置は、例えば撮像部200の基準位置(例えば対物レンズ系270や撮像素子260の位置)から被写体までの距離で表す。
処理部300は、A/D変換部310と、前処理部320と、画像処理部330と、フォーカス制御部360と、制御部350と、ミスト検出部340と、を含む。
A/D変換部310は、撮像素子260から順次出力されるアナログ信号をデジタルの画像に変換して、前処理部320に順次出力する。前処理部320は、A/D変換部310から出力された画像に対して、例えばホワイトバランス処理や、補間処理(デモザイキング処理)、YCbCr変換処理等の画像処理を施し、画像処理部330とフォーカス制御部360に順次出力する。
画像処理部330は、前処理部320から出力された画像に対して、例えば色変換や、階調変換、エッジ強調、ノイズリダクション等の画像処理を施し、表示部400に画像を順次出力する。表示部400は、例えば液晶モニタであり、画像処理部330から順次出力される画像を表示する。
ミスト検出部340は、前処理部320からの画像に基づいてミストの発生やミストの消失を検出する。フォーカス制御部360は、前処理部320からの画像に基づいてフォーカスレンズ駆動部230を制御し、被写体にフォーカスを合わせる合焦動作を制御する。フォーカス制御部360は、ミストの発生やミストの消失が検出された場合には合焦動作の停止や再開を行う。ミスト検出部340とフォーカス制御部360の詳細については後述する。
制御部350は、外部I/F部500や画像処理部330、フォーカス制御部360、撮像素子260、ズームボタン210等の内視鏡装置の各部と相互に接続されており、それらの各部に対して制御信号の入出力を行う。
外部I/F部500は、内視鏡装置に対するユーザからの入力等を行うためのインターフェースである。例えば、AFの開始/終了を行うためのAFボタンや、画像処理のパラメータを調整するための調整ボタンや、処置具(電気メスや超音波メス)の通電をオン・オフするためのスイッチ等を含んで構成されている。処置具の通電情報(スイッチのオン・オフを示す情報)は、制御部350へ転送される。
2.2.ミスト検出部、フォーカス制御部
図3に、ミスト検出部340及びフォーカス制御部360の詳細な構成例を示す。ミスト検出部340は、ミスト検出領域設定部341と、検出部342と、を含む。フォーカス制御部360は、AF領域設定部361と、AF評価値算出部362と、フォーカスレンズ制御部363と、を含む。
図3に、ミスト検出部340及びフォーカス制御部360の詳細な構成例を示す。ミスト検出部340は、ミスト検出領域設定部341と、検出部342と、を含む。フォーカス制御部360は、AF領域設定部361と、AF評価値算出部362と、フォーカスレンズ制御部363と、を含む。
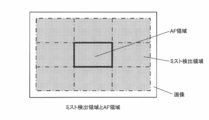
ミスト検出領域設定部341は、例えば制御部350から出力される画像サイズ等の情報に基づいて、図4に示すようなミスト検出領域を設定する。その後、ミスト検出領域設定部341は、設定したミスト検出領域情報を検出部342に出力する。例えば、画像を3×3の領域に分割して9個の評価ブロックを設定し、これらの集合をミスト検出領域とする。ここでミスト検出領域として設定される評価ブロックの数は、任意に設定可能であることは言うまでもない。
検出部342は、ミスト検出領域設定部341から出力されたミスト検出領域情報と、前処理部320から順次出力される画像とに基づいて、ミストを検出する。その後、検出部342は、ミストが検出されたか否かを表すミスト検出情報をフォーカスレンズ制御部363に出力する。ミストの検出方法の詳細については後述する。
AF領域設定部361は、例えば制御部350から出力される画像サイズ等の情報に基づいて、図4に示すようなAF領域を設定する。その後、AF領域設定部361は、設定したAF領域情報をAF評価値算出部362に出力する。本実施形態では、説明を簡単にするために、ミスト検出領域として設定された複数の評価ブロックのうち、中央の評価ブロックと同じ領域をAF領域としている。実際には評価ブロックのサイズとAF領域とが同じサイズである必要はないため、評価ブロックとは全く異なる大きさの領域をAF領域として画像の中央付近に設定してもよい。
AF評価値算出部362は、AF領域設定部361から出力されたAF領域情報と、前処理部320から順次出力される画像とに基づいて、AF評価値を算出する。例えば、AF領域に含まれるすべての画素のY信号を算出し、そのY信号に対して任意のBPF(バンドパスフィルタ)処理を行い、そのBFP処理の出力の総和をAF評価値とする。その後、AF評価値算出部362は、算出したAF評価値をフォーカスレンズ制御部363に順次出力する。
フォーカスレンズ制御部363は、検出部342から出力されるミスト検出情報と、AF評価値算出部362から出力されるAF評価値に基づいてフォーカスレンズの制御情報を生成し、フォーカスレンズ駆動部230に出力する。フォーカスレンズ駆動部230は、フォーカスレンズ制御部363から出力される制御情報に基づいて、フォーカスレンズを駆動する。
2.3.フォーカス制御処理
図5に、上記のようなミスト検出を行う場合のフォーカス制御処理のフローチャートを示す。
図5に、上記のようなミスト検出を行う場合のフォーカス制御処理のフローチャートを示す。
AF制御が開始されると、フォーカスレンズ制御部363は合焦動作を開始する。合焦動作が開始されると、フォーカスレンズ制御部363は公知のAF技術を使用して合焦動作を行う。公知のAF技術としては、例えばコントラストAF等の公知のピーク検出制御を用いる。
具体的には、本実施形態においては、フォーカス制御部360は、AF評価値を取得するためのフォーカスレンズ位置(目標位置)を決定し、その目標位置をフォーカスレンズ駆動部230に出力する(ステップS101)。フォーカスレンズ駆動部230は、目標位置にフォーカスレンズを移動させる。次に、フォーカスレンズ制御部363は、目標位置におけるAF評価値を、AF評価値算出部362から取得する(ステップS102)。次に、フォーカス制御部360は、ミスト検出部340が備える検出部342からミスト検出情報を取得する(ステップS103)。
次に、ミスト検出情報に基づいてミストが発生したか否かを判定する(ステップS104)。ミストが発生していないと判定した場合には、AF評価値に基づいて合焦制御を行い(ステップS105)、合焦が完了したか否かの判断を行う(ステップS106)。合焦が完了していない場合にはステップS101以降の動作を繰り返す。合焦が完了した場合には合焦動作を終了する。そして、再び合焦動作を開始する。一方、ステップS104においてミストが発生したと判定した場合には合焦制御をバイパスし、合焦動作を終了する。
ステップS104においてミストが発生したと判定して合焦動作を終了した場合、フォーカスレンズ制御部363は待機動作を開始する。待機動作が開始されると、フォーカスレンズ制御部363は、検出部342から出力されるミスト検出情報を取得する(ステップS201)。次にフォーカスレンズ制御部363は、ミスト検出情報に基づいてミストが消失したか否かを検出する(ステップS202)。ミストが消失していないと判定した場合には、ステップS201以降の動作を繰り返す。一方、ミストが消失したと判定した場合には待機動作を終了する。
待機動作が終了した場合、フォーカスレンズ制御部363はAF制御開始の処理に戻る。つまり、ミスト検出によって待機動作が実行されている間は、フォーカスレンズ制御部363は、同じフォーカスレンズ位置を出力し続け、フォーカスレンズの駆動は行わない。例えば、合焦動作を終了したときの目標位置をフォーカスレンズ駆動部230へ出力し続ける。なお、ここで詳しくは述べないが、AF制御開始の処理は、予め定められた状態であるか否か(例えば、シーン検出をトリガにする等)によって開始されることとなる。
2.4.ミスト検出処理
次に、ミスト検出処理について詳細に説明する。まず、図4のようなミスト検出領域を設定する理由について説明する。
次に、ミスト検出処理について詳細に説明する。まず、図4のようなミスト検出領域を設定する理由について説明する。
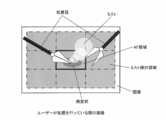
図6に、ユーザが処置を行っている間に内視鏡装置が取得する代表的な画像を表した図を示す。上述したように、視野の中心付近で処置を行うためAF領域を画像の中心付近に配置することが望ましい。また、ミストは処置によって発生するため、AF領域付近でミストの発生頻度が最も大きくなる。そのため、AF評価値に限らず画像のAF領域から取得される情報だけを用いて、ユーザが処置を行っている間の合焦動作を精度よく停止させることは困難である。
例えば、AF領域でコントラストの変化を検出した場合、ミストによってコントラストが変化したのか、フォーカスの変化によってコントラストが変化したのかを区別することは難しい。即ち、AF領域のコントラスト変化からミストの発生を判断して合焦動作を停止させることは難しい。
一方、画像の周辺付近に着目すると、ミストの発生時に画像の中央付近とは画像の変化が異なっている。即ち、ユーザが処置を行っている間は病変部が画像の中央付近に位置するように視野が固定され、その中央付近の病変部に対して処置を行うため、画像の周辺付近に対しては処置が行われず、画像の周辺付近からはミストが発生しない。そのため、中央付近でミストが発生したとき、そのミストが周辺付近に到達するまでは、周辺付近での画像の変化は比較的小さくなる。
そこで本実施形態では、図4に示すように、AF領域だけではなく画像の周辺まで含んだ領域をミスト検出領域(すなわち、AF領域とは異なる領域を含んでいることとなる)として設定し、ここから取得されるミスト検出情報を用いて合焦動作の開始、終了制御を行う。このように画像の中央と周辺の情報からミストを検出することで、中央から周辺へ広がるミストの特徴を使うことが可能となり、フォーカス変化による画像変化と区別して正確にミストを検出することができる。これにより、ユーザが見ているシーンにミストが無く、実際にピント調整が必要となる場面だけで合焦動作を実行することが可能になる。
以下、ミストの発生を検出する手法と、ミストの消失を検出する手法について詳細に説明する。
ミスト検出領域として設定された複数個のブロックをb[i]とする。iはブロックに対応付けられたブロック番号であり、図4の例ではi=0、1、・・・、8である。検出部342は、ブロックb[i]の全てに対して、ブロックの平均輝度b_Y[i][n]と、ブロックの平均彩度b_S[i][n]と、ブロックのDレンジb_D[i][n]と、を現在の画像から算出し、それらを図示しないメモリーに記憶する。ここで、nは画像が取得されたタイミングを表している。
次に検出部342は、下式(1)~(3)を用いてミスト検出の評価値Vy[n]、Vs[n]、Vd[n]を算出する。ここで、b_Y[i][n-x]は、現在の画像よりxフレーム前に取得された画像から算出された各ブロックの平均輝度であり、b_S[i][n-x]は、現在の画像よりxフレーム前に取得された画像から算出された各ブロックの平均彩度であり、b_D[i][n-x]は、現在の画像よりxフレーム前に取得された画像から算出された各ブロックのDレンジである。ここで、xは任意の数を設定できる。



上式(1)~(3)から分かるように、Vy[n]は現在画像(時刻がn)から算出された各評価ブロックの平均輝度と、xだけ過去に取得された画像から算出された各評価ブロックの平均輝度との差の総和として算出されている。またVs[n]は現在画像(時刻がn)から算出された各評価ブロックの平均彩度と、xだけ過去に取得された画像から算出された各評価ブロックの平均彩度との差の総和として算出されている。更にVd[n]は現在画像(時刻がn)から算出された各評価ブロックのDレンジと、xだけ過去に取得された画像から算出された各評価ブロックのDレンジとの差の総和として算出されている。
評価値Vy[n]、Vs[n]、Vd[n]の時間変化について図7(A)~図15を用いて説明する。図7(A)~図7(F)は、ミストの発生から消失までの画像の時間変化を模式的に示す図である。
図7(A)は、ミスト検出領域とAF領域を示す。図7(B)に示すように、病変部をAF領域に合わせて処置具を挿入し、処置を開始する。図7(C)に示すように、処置を行っている中央部からミストが発生する。図7(D)に示すように、ミストが周辺部に広がっていき、腹腔内に充満する。ミストが発生している間は、ミストの濃度の変化はあるものの、この状態が続く。図7(E)に示すように、ミストの発生が止まるとミストが徐々に薄れていく。図7(F)に示すように、ミストが消失し、AF可能な状態に戻る。
図8~図10は、上記のようにミストが変化するときの画像の輝度値、彩度値、コントラスト値の変化を示す図である。図8~図10の右図は各ブロックでの値を示し、左図は全ブロックの平均値を示す。また、時間tB~tFは、それぞれ図7(B)~図7(F)のタイミングに対応している。
図8~図10に示すように、ミストが発生して腹腔内に充満するに従って輝度値が上昇し、彩度値とコントラスト値(Dレンジ)が低下する。そして、ミストの発生が止まり、消失していくに従って輝度値が低下し、彩度値とコントラスト値が上昇する。これは、ミストが照明を乱反射するため輝度値を上昇させ、ミストが不透明であるため彩度値やコントラスト値を低下させるためである。
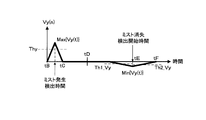
図11~図13は、上記のように輝度値、彩度値、コントラスト値が変化するときの評価値Vy[n]、Vs[n]、Vd[n]の変化を示す図である。これらの評価値は、差分値なので、図8~図10の特性を微分したような特性となる。
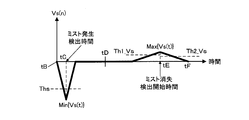
図11~図13に示すように、ミストの発生時には、輝度値が正の傾きを有するので評価値Vy[n]は上に凸の特性であり、彩度値とコントラスト値は負の傾きを有するので評価値Vs[n]、Vd[n]は下に凸の特性となる。一方、ミストの消失時には、輝度値の評価値Vy[n]は下に凸の特性であり、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]は上に凸の特性となる。
このような評価値Vy[n]、Vs[n]、Vd[n]の変化に対して、本実施形態では以下のようにしてミストが発生したか否かを判定する。
即ち、検出部342は、輝度値の評価値Vy[n]が所定の閾値Thyを上回った場合で、且つ、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]がそれぞれ所定の閾値Ths、Thdを下回った場合の時刻n(図11~図13ではtBとtCの間)でミストが発生したと判定する。
或は、検出部342は、輝度値の評価値Vy[n]が極大値Max{Vy}となる時間と、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]がそれぞれ極小値Min{Vs}、Min{Vd}となる時間を検出し、それらの時間が同時(略同時を含む)に発生した場合に、その時間n(図11~図13ではtC)でミストが発生したと判定してもよい。
次に、評価値Vy[n]、Vs[n]、Vd[n]を用いてミストが消失したか否かの判定を行う。
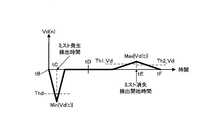
即ち、検出部342は、輝度値の評価値Vy[n]が第1の所定閾値Th1_Vyより小さい条件下で極小値Min{Vy}となった時刻と、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]がそれぞれ第1の所定閾値Th1_Vs、Th1_Vdより大きい条件下で極大値Max{Vs}、Max{Vd}となる時刻(図11~図13ではtE)を検出する。そして、検出部342は、それらの時刻以降で、輝度値の評価値Vy[n]が第2の所定閾値Th2_Vyを上回った場合、且つ、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]がそれぞれ第2の所定閾値Th2_Vs、Th2_Vdを下回った場合の時刻n(図11~図13ではtEとtFの間)でミストが消失したと判定する。
評価値Vy[n]、Vs[n]、Vd[n]が極大又は極小に達した後、第2の所定閾値に達するまで待つことで、AF領域のコントラストが回復してAF制御が可能な程度までミストが消失したときに、AF制御を再開させることができる。
或は、検出部342は、輝度値の評価値Vy[n]が第1の所定閾値Th1_Vyより小さい条件下で極小値Min{Vy}となった場合で、且つ、彩度値の評価値Vs[n]とコントラスト値の評価値Vd[n]がそれぞれ第1の所定閾値Th1_Vs、Th1_Vdより大きい条件下で極大値Max{Vs}、Max{Vd}となった場合の時刻n(図11~図13ではtE)でミストが消失したと判定してもよい。
検出部342は、以上のミスト発生及びミスト消失の判定結果をミスト検出情報としてフォーカスレンズ制御部363に出力する。
2.5.ミスト検出処理の第2手法
なお、ミスト検出の手法は上記に限定されない。例えば、下式(4)~(6)により評価値Vy[n]、Vs[n]、Vd[n]を算出してもよい。



なお、ミスト検出の手法は上記に限定されない。例えば、下式(4)~(6)により評価値Vy[n]、Vs[n]、Vd[n]を算出してもよい。
ここで、MaxA()は、カッコ内の値のうち絶対値が最大となる値を取得する演算である。最大値の判断は絶対値で行うが、取得する値は符号付きのままである。即ち、評価値Vy[n]は、現在画像(時刻がn)から算出された各評価ブロックの平均輝度と、xだけ過去に取得された画像から算出された各評価ブロックの平均輝度との差の絶対値が最大となる、符号付の値(絶対値に正負符号を付けた値)である。また、評価値Vs[n]は、現在画像(時刻がn)から算出された各評価ブロックの平均彩度と、xだけ過去に取得された画像から算出された各評価ブロックの平均彩度との差の絶対値が最大となる、符号付の値(絶対値に正負符号を付けた値)である。また、評価値Vd[n]は、現在画像(時刻がn)から算出された各評価ブロックのDレンジと、xだけ過去に取得された画像から算出された各評価ブロックのDレンジとの差の絶対値が最大となる、符号付の値(絶対値に正負符号を付けた値)である。
上式(4)~(6)は、複数の評価ブロックの中で最大変化が発生しているブロックの評価値を使用するものである。特にミストの発生時においてミストが局在する傾向にあるが、評価値の最大変化が生じるのは、そのミストが局在している領域と考えられる。このため、最大変化を評価値として用いることで、ミスト発生時に発生領域が局在している状態をより感度良く検出できるようになる。
2.6.ミスト検出処理の第3手法
更に、下式(7)~(9)により評価値Vyσ[n]、Vsσ[n]、Vdσ[n]を算出してもよい。



更に、下式(7)~(9)により評価値Vyσ[n]、Vsσ[n]、Vdσ[n]を算出してもよい。
ここで、sigma()は、カッコ内の値の標準偏差を取得する演算である。即ち、評価値Vyσ[n]は、現在画像(時刻がn)から算出された各評価ブロックの平均輝度と、xだけ過去に取得された画像から算出された各評価ブロックの平均輝度との差に対する、全評価ブロック内の標準偏差である。また、評価値Vsσ[n]は、現在画像(時刻がn)から算出された各評価ブロックの平均彩度と、xだけ過去に取得された画像から算出された各評価ブロックの平均彩度との差に対する、全評価ブロック内の標準偏差である。また、評価値Vdσ[n]は、現在画像(時刻がn)から算出された各評価ブロックのDレンジと、xだけ過去に取得された画像から算出された各評価ブロックのDレンジとの差に対する、全評価ブロック内の標準偏差である。
ミスト発生時にはミストが局在するので、ブロック間で輝度値や彩度値、コントラスト値の時間変化にばらつきがある(図8~図10の右図)。そのため、上式(7)~(9)の標準偏差はミスト発生時には大きくなるので、ミスト以外の変化(例えばフォーカスの変化等による画像全体の変化)と区別することができる。即ち、ミスト以外の変化によって評価値が変化しているのか、或はミストの発生や消失により評価値に局所的な変化が起こっているのかを、上式(7)~(9)の標準偏差と所定閾値とを比較することで判定できる。
なお、評価値Vyσ[n]、Vsσ[n]、Vdσ[n]のような標準偏差に限らず、全評価ブロック内で、時間変化が局所的に発生しているのか否かを判定する為のパラメータを算出できればよい。例えば、全評価ブロック内での最大値と最小値との差分値の変化量を算出してもよい。
2.7.変形例
以上の実施形態では画像の中央部と周辺部を含むミスト検出領域を設定したが、領域の設定手法はこれに限定されない。即ち、上述したように、内視鏡装置ではユーザが処置を行っている間、画像の中央付近でミストが発生する確率が最も大きくなる。このため画像の中央領域(=AF領域)のみをミスト検出領域として設定し、上述と同様の判定処理を行ってミストを検出してもよい。
以上の実施形態では画像の中央部と周辺部を含むミスト検出領域を設定したが、領域の設定手法はこれに限定されない。即ち、上述したように、内視鏡装置ではユーザが処置を行っている間、画像の中央付近でミストが発生する確率が最も大きくなる。このため画像の中央領域(=AF領域)のみをミスト検出領域として設定し、上述と同様の判定処理を行ってミストを検出してもよい。
一般には中央付近でミストが発生する確率が高いが、周辺部からミストが発生する場合もある。この場合、周辺部で発生したミストがAF領域に侵入してくる迄は、AF評価値を正常に取得することが可能である。そのため、中央領域のみをミスト検出領域として設定することで、ミストがAF領域に侵入してくる迄の間、AF制御を継続することができる。
また、上記の実施形態ではミスト評価値を画面全体の総和により検出したが、ミスト評価値の算出手法はこれに限定されない。例えば、3×3の各ブロックで、それぞれ独立に上記と同様の判定処理を行ってミスト検出を行い、所定数のブロックでミストの発生を検出したときに、合焦動作を停止してもよい。
このようにすれば、画面内の何所かでミストが発生したら、その時点でできるだけ早くAF制御を停止し、フォーカスレンズを固定にできる。これにより、AF制御の誤動作の可能性を未然に防止できるという利点がある。
以上の第2実施形態によれば、ミスト検出部340は、撮像部200により撮像された撮像画像からミストの発生を検出する。ここで、撮像画像とは、前処理部320により処理された画像である。或は、画像処理部330により処理された画像であってもよい。
図7(B)~図7(F)で上述のように、処置を行っている領域でミストが発生し、そのミストが撮影領域に拡散していく過程で、画像には変化が生じている。即ち、このような変化を画像から検出することによって、ミストの発生を画像から検出し、AF制御を停止することが可能となる。
具体的には、ミスト検出部340は、撮像画像の輝度値に基づく第1評価値Vy[n]及び、撮像画像の彩度値に基づく第2評価値Vs[n]、撮像画像のコントラスト値に基づく第3評価値Vd[n]のうち、少なくとも2つ以上(その値を含む)の評価値をミスト評価値として求め、そのミスト評価値に基づいてミストの発生を検出する。
第2実施形態では、コントラスト値はダイナミックレンジにより求めている。ダイナミックレンジは、輝度値のヒストグラムにおいて最大値と最小値との差分値である。なお、これに限定されず、画像のコントラストを表す指標を第3評価値として用いることが可能であり、例えば画像の高周波成分を抽出し、その高周波成分から第3評価値を求めてもよい。
ミストは霧状に拡散した物質であるため照明を乱反射し、図8~図10で上述のように輝度値を上昇させ、彩度値やコントラスト値を低下させる。そのため、これらのパラメータから評価値を算出することで、ミストの発生を検出することが可能となる。例えば、フォーカスの変化によってもコントラスト値等が変化するが、2つ以上(その値を含む)の評価値を組み合わせることによって、ミスト以外によるパラメータの変化と区別でき、精度良くミストを検出することができる。
図11~図13で上述のように、ミスト検出部340は、輝度値の時間変化を第1評価値Vy[n]として求め、彩度値の時間変化を第2評価値Vs[n]として求め、コントラスト値の時間変化を第3評価値Vd[n]として求める。
輝度値や彩度値、コントラスト値そのものは、ミストの濃度や撮影状況(例えば被写体の種類や、被写体までの距離や、照明の明るさ等)に影響されるため、ミストを検出する条件(例えば閾値)を設定することが難しい。そのため、これらのパラメータを直接使うとミストを正確に検出することは難しい。この点、パラメータの時間変化を用いることで、図11~図13に示すようにミストの発生や消失の変化点で評価値が変わるので、パラメータそのものの値に影響されにくい条件(例えば極大、極小等)を設定でき、精度良くミストの発生や消失を検出できる。
また、パラメータの時間変化はミストの発生時や消失時に起きるため、時間変化を用いることによって、実際にミストが発生してから早い段階でミストが発生したと判定することが可能となる。或は、ミストが十分に消失した段階でミストが消失したと判定することが可能となる。
図11~図13で上述のように、ミスト検出部340は、第1評価値Vy[n]の極大値Max{Vy}と第2評価値Vs[n]の極小値Min{Vs}と第3評価値Vd[n]の極小値Min{Vd}とを検出する。そして、ミスト検出部340は、第1評価値Vy[n]の極大値Max{Vy}を検出した第1タイミングと第2評価値Vs[n]の極小値Min{Vs}を検出した第2タイミングと第3評価値Vd[n]の極小値Min{Vd}を検出した第3タイミングとが一致したと判断した場合に、ミストが発生したと判定する。
パラメータの時間変化の極大や極小は、パラメータそのものの値に依らずに発生する。そのため、パラメータの時間変化の極大値や極小値をミスト発生の条件とすることで、ミストの濃度や撮影状況に左右されなくなるため、ミストの発生を精度良く検出することができる。
なお、第1~第3のタイミングが完全に一致する場合だけでなく、第1~第3のタイミングが多少前後する場合にも第1~第3のタイミングが一致したと判断する。即ち、フォーカスの変化等の他の要因によって評価値が変化する場合と区別できればよいので、ミストを検出するために必要な所定時間だけ第1~第3のタイミングがずれてもよい。例えば、実際にミストを撮影して第1~第3のタイミングを測定し、統計的に起きうるタイミングのずれを許容される所定時間として設定しておき、その所定時間以内に第1~第3のタイミングが検出された場合には第1~第3のタイミングが一致したと判断する。
また、ミスト検出部340は、第1評価値Vy[n]が第1所定閾値Thyよりも大きく、第2評価値Vs[n]が第2所定閾値Thsよりも小さく、第3評価値Vd[n]が第3所定閾値Thdよりも小さい場合に、ミストが発生したと判定してもよい。
このようにすれば、評価値が極大値や極小値に達するよりも前にミストが発生したと判定することができるため、より早い段階でミストの発生を検出し、AF制御を停止することが可能となる。これにより、ミストが少ない状態でAF制御を停止できるので、AFの誤動作をより確実に抑制できる。
また、フォーカス制御部360は、撮像画像にフォーカス評価値検出領域(AF領域)を設定し、合焦動作における合焦度合いを評価するためのフォーカス評価値(AF評価値)をフォーカス評価値検出領域から求める。図4に示すように、ミスト検出部340は、フォーカス評価値検出領域を内包するミスト検出領域(3×3のブロック領域)を設定し、ミストの発生を検出するためのミスト評価値をミスト検出領域の画像から求める。
処置を行う領域にフォーカスを合わせるため、上述のようにフォーカス評価値検出領域は処置を行う中央部に設定される。ミストが発生する可能性が最も高いのは処置を行う領域であるため、フォーカス評価値検出領域からミストが発生する可能性が高いことになる。そのため、少なくともフォーカス評価値検出領域を包含するようにミスト検出領域を設定することで、ミストの発生を確実に検出できる。
具体的には、ミスト検出部340は、フォーカス評価値検出領域に対応する第1のブロック領域(3×3の中央のブロック)と、フォーカス評価値検出領域外の第2~第nのブロック領域(3×3の周辺の8ブロック。nは2以上(その値を含む)の自然数)とをミスト検出領域として設定する。そして、ミスト検出部340は、その第1~第nのブロック領域の画像からミスト評価値を求める。
図7(B)~図7(F)で上述のように、ミストは時間と共に腹腔内に充満していく。そのため、ミストの発生源であるフォーカス評価値検出領域と、その外の領域にブロック領域を設定することで、ミストが発生源から腹腔内に広がるときの画像の変化を、ミスト評価値として取得することが可能となる。これにより、ミスト特有の変化を使ってミストを検出できるので、その他の要因による誤検出を抑制して、ミストの発生や消失を精度良く検出できる。
また、第1の実施形態では、ミスト検出部340はミストの消失を検出する。そして、フォーカス制御部360は、ミスト検出部340によりミストの消失が検出された場合、フォーカス制御における合焦動作の実行を再開する。図7(A)~図10等で上述のように、ミストが消失するときに画像の輝度値や彩度値、コントラスト値等のパラメータが時間的に変化するので、そのパラメータの変化を画像から検出することにより、ミストの消失を検出する。
基本的にはAF制御が行われ、処置を行っている領域にフォーカスが合っている状態が維持されることが望ましい。この点、ミストの消失を検出して合焦動作の実行を再開することで、ミストによって正常なAF制御を行えない間だけAF制御を停止し、正常なAF制御が行える状態に戻ったときにAF制御を再開できる。これにより、ミストの有無に関わらずフォーカスが合っている状態を維持することができ、ユーザの利便性が向上する。
3.第2の実施形態
3.1.ミスト評価値の算出手法
図14に、第2の実施形態におけるミスト検出部340とフォーカス制御部360の詳細な構成例を示す。なお、内視鏡装置の構成は第1の実施形態と同様である。
3.1.ミスト評価値の算出手法
図14に、第2の実施形態におけるミスト検出部340とフォーカス制御部360の詳細な構成例を示す。なお、内視鏡装置の構成は第1の実施形態と同様である。
ミスト検出部340は、ミスト検出領域設定部341と検出部342とを含む。フォーカス制御部360は、AF領域設定部361とAF評価値算出部362とフォーカスレンズ制御部363とフォーカスレンズ位置記録部364とを含む。なお、既に説明した構成要素と同一の構成要素については同一の符号を付し、適宜説明を省略する。
AF評価値算出部362は、Y信号及び色信号に対してBPF(バンドパスフィルタ)処理を行い、その結果からAF評価値を算出する。検出部342には、Y信号及び色信号に対してBPF(バンドパスフィルタ)処理を行った結果が入力される。また、制御部350は、画像の明るさができるだけ一定となるように、白色光源610が出射する照明の光量を制御する。検出部342には、その白色光源610の調光補正量が入力される。
検出部342は、BPF処理の結果と調光補正量を用いて下式(10)、(11)によりY信号Y’[n]と色信号C’[n]を算出する。


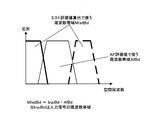
ここで、Y[n]とC[n]は前処理部320から検出部342への出力信号である。即ち、Y[n]は画像のY信号であり、C[n]は画像のCr信号又はCb信号である。また、Bpf(Y[n])とBpf(C[n])はAF評価値算出部362から検出部342への出力信号である。即ち、Bpf{Y[n]}はY信号をBPF処理した結果であり、図15に示す帯域AfBdのY信号である。Bpf{C[n]}は色信号をBPF処理した結果であり、図15に示す帯域AfBdの色信号である。また、LCは、調光補正量であり、光量が大きいほど値が大きい。
Y信号Y’[n]と色信号C’[n]は、図15に示す低周波及び高周波の帯域MistBdの信号となる。検出部342は、これらの信号から評価値を算出する。上述したように、評価値は各評価ブロック(又は全評価ブロック)で平均化するため、帯域MistBdのうち高周波(図15の太点線)の成分は実質的にカットされ、低周波(太実線)の成分のみが残る。
このように、AF制御につかう空間周波数の帯域を除外することで、フォーカスの変化によって評価値が変化しにくくなるため、合焦・非合焦の状態にできるだけ影響されずに精度よくミストを検出できる。また、ミストの空間周波数は低周波数帯域であるため、その低周波数帯域の画像信号から評価値を算出することで、ミストを精度よく検出できる。
また、図8等で説明したように、ミストによって画像の輝度が増すため、照明の光量を減らす方向に調光が行われる。そうすると、評価値の変化が小さくなり、ミストの検出が難しくなる。そのため、調光補正量LCで画像信号を補正することにより、調光の影響をキャンセルしてミストの変化だけを取り出すことが可能となり、ミストを精度よく検出できる。
なお、上記構成では、AF評価値を求めるためのBPF処理を流用することで回路規模をできるだけ削減することが可能であるが、これに限らず、検出部342でローパスフィルタ処理を行う構成とすれば、同様の効果を得ることができる。
3.2.フォーカスレンズ位置の制御手法
次に、合焦動作を停止させる際の、フォーカスレンズ位置の制御手法について説明する。
次に、合焦動作を停止させる際の、フォーカスレンズ位置の制御手法について説明する。
フォーカスレンズ位置記録部346は、フォーカスレンズ制御部363で決定したフォーカスレンズの位置を所定時間分だけ保存する。また、フォーカスレンズ制御部363には、外部I/F部からの電気メス、或いは超音波メスの通電情報(ON/OFF情報)が制御部350を介して入力される。
第1の実施形態で示したミスト発生の検出時刻nは、ミスト評価値の極大値と極小値が同時(略同時)に発生した時刻か、閾値判定により条件を満足する場合の時刻である。図11~図13では、時間tC、或は時間tBとtCの間でミストの発生が検出される。そのため、検出した時刻はミストの発生直後であるとは言えず、ミスト発生時刻から若干の遅延が発生している。
そこで本実施形態では、この遅延を補償するために所定時刻分のフォーカスレンズ位置を記録しておく。遅延補償時間は、ミスト発生時刻nよりも過去でミスト評価値が所定閾値よりも小さくなるまでの時間である。例えば、ミストの時間変化を実際に撮影して統計的に算出する。フォーカスレンズ制御部363は、ミストの発生が検出されて合焦動作を停止する際に、ミストの発生が検出された時刻nよりも所定時刻前のフォーカスレンズの位置にフォーカスレンズを移動させる(戻す)。
このようにすれば、実際のミストの発生時刻をより正確に特定できるため、その実際の発生時刻でのフォーカスレンズの位置で合焦動作を停止できる。即ち、実際にミストが発生しはじめてからミスト検出部340によりミストの発生が検出されるまでの間に、AF誤動作が発生して非合焦状態となる可能性があるが、そのような場合であってもミスト発生直前の合焦位置にフォーカスレンズを戻すことが可能となる。
更に、制御部350からの外部I/F部からの電気メス、或いは超音波メスの通電情報(ON/OFF情報)を利用することで、遅延補償時間の精度を向上させることが可能になる。即ち、フォーカスレンズ制御部363は、ミストの発生が検出された時刻nよりも過去で且つ最も時間が近い電気メスや超音波メスの通電状態がONとなった時刻でのフォーカスレンズの位置を、フォーカスレンズ位置記録部364から読み出す。そして、ミストの発生が検出されて合焦動作を停止するときに、その読み出したフォーカスレンズの位置にフォーカスレンズを移動させる。
なお、電気メスや超音波メスの通電状態がONとなった時刻をミスト発生時刻とする制御にした場合、ミストが発生しなかった場合にミスト消失時刻を検出できず、AF制御を再開する時刻を特定できなくなる。この課題は、電気メスや超音波メスの通電状態がONとなった後に、第1の実施形態のようにミスト発生を画像で検出する処理も行う事で解決できる。
以上の第2実施形態によれば、フォーカス制御部360は、合焦動作における合焦度合いを評価するためのフォーカス評価値(AF評価値)を、撮像画像の所定周波数帯域(図15の帯域AfBd)の成分に基づいて求める。そして、ミスト検出部340は、その所定周波数帯域よりも低い周波数帯域(帯域MistBdのうち低周波帯域)の成分に基づいて、ミストの発生を検出するためのミスト評価値を求める。
上述したように、ミストの空間周波数は低周波であるため、低周波数の帯域の画像からミスト評価値を求めることで、ミストの変化を効率よく検出できる。また、AF等によってフォーカスが変動した際、フォーカス評価値を求める帯域が最も影響を受けやすいと考えられる。この点、フォーカス評価値を求める帯域に重ならない、より低い帯域の画像からミスト評価値を求めることで、フォーカスの変動に影響されずにミストの発生や消失を検出できる。
また、本実施形態の内視鏡装置は、撮像部200が撮像する被写体に照射される照明の光量を制御する光量制御部(制御部350)を含む。そして、ミスト検出部340は、その照明の光量に基づいて撮像画像の画素値を補正し(上式(10)、(11))、その補正した画素値に基づいて、ミストの発生を検出するためのミスト評価値を求める。
照明の光量が変化した場合、当然のことながら輝度値等のパラメータが変化し、ミストの発生や消失を正確に判断できない場合がある。この点、照明の光量(調光補正量LC)で画素値を補正することで、ミストによるパラメータの変化を抽出できるので、ミスト検出の精度を向上できる。
また、第2の実施形態では、フォーカス制御部360は、フォーカス制御における合焦動作の実行を停止する際に、ミスト検出部340によりミストの発生が検出されたタイミングよりも所定時間前のフォーカスレンズの位置にフォーカスレンズを移動させる。
上述のようにミストはAF領域から発生する可能性が高いので、ミストが発生した後すぐにAF制御に影響を与える可能性がある。そのため、ミストの発生を検出した時点で既にAFが誤動作している可能性がある。この点、過去のフォーカスレンズの位置を記憶しておき、ミストの発生が検出されたタイミングよりも所定時間前のフォーカスレンズの位置に移動させることで、ミストが発生する前(又は直後)のAFが誤動作する可能性が低いときのフォーカスレンズ位置で停止させることができる。
また、ミストは、処置具(例えば電気メスや超音波メス)による処置時に被写体から発生するミストである。フォーカス制御部360は、フォーカス制御における合焦動作の実行を停止する際に、処置具が通電状態となったタイミングでのフォーカスレンズの位置にフォーカスレンズを移動させる。
通電する必要がある処置具では、処置を開始するのは通電状態としてからであり、ミストが発生するのは少なくとも処置具を通電状態にした後ということになる。そのため、通電状態にした時点ではミストは発生していないので、その時点でのフォーカスレンズ位置に設定することで、処置している領域に確実にフォーカスが合っている状態でAF制御を停止できる。
なお、以上で説明した実施形態の処理部300等は、プロセッサとメモリを含んでもよい。ここでのプロセッサは、例えばCPU(Central Processing Unit)であってもよい。ただしプロセッサはCPUに限定されるものではなく、GPU(Graphics Processing Unit)、或いはDSP(Digital Signal Processor)等、各種のプロセッサを用いることが可能である。またプロセッサはASICによるハードウェア回路でもよい。また、メモリはコンピュータにより読み取り可能な命令を格納するものであり、当該命令がプロセッサにより実行されることで、本実施形態に係る処理部300等の各部(例えば、前処理部320、画像処理部330、ミスト検出部340、制御部350、フォーカス制御部360等)が実現されることになる。ここでのメモリは、SRAM、DRAMなどの半導体メモリであってもよいし、レジスターやハードディスク等でもよい。また、ここでの命令は、プログラムを構成する命令セットの命令でもよいし、プロセッサのハードウェア回路に対して動作を指示する命令であってもよい。
以上、本発明を適用した実施形態およびその変形例について説明したが、本発明は、各実施形態やその変形例そのままに限定されるものではなく、実施段階では、発明の要旨を逸脱しない範囲内で構成要素を変形して具体化することができる。また、上記した各実施形態や変形例に開示されている複数の構成要素を適宜組み合わせることによって、種々の発明を形成することができる。例えば、各実施形態や変形例に記載した全構成要素からいくつかの構成要素を削除してもよい。さらに、異なる実施の形態や変形例で説明した構成要素を適宜組み合わせてもよい。このように、発明の主旨を逸脱しない範囲内において種々の変形や応用が可能である。また、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語と共に記載された用語は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。
10 内視鏡装置、100 硬性鏡、110 レンズ系、
120 ライトガイド部、200 撮像部、210 ズームボタン、
220 フォーカスレンズ、230 フォーカスレンズ駆動部、
240 ズームレンズ、250 ズームレンズ駆動部、260 撮像素子、
270 対物レンズ系、300 処理部、310 A/D変換部、
320 前処理部、330 画像処理部、334 AF評価値算出部、
340 ミスト検出部、341 ミスト検出領域設定部、342 検出部、
346 フォーカスレンズ位置記録部、350 制御部、
360 フォーカス制御部、361 AF領域設定部、
362 AF評価値算出部、363 フォーカスレンズ制御部、
364 フォーカスレンズ位置記録部、400 表示部、
500 外部I/F部、600 光源部、610 白色光源、
620 ライトガイドケーブル
120 ライトガイド部、200 撮像部、210 ズームボタン、
220 フォーカスレンズ、230 フォーカスレンズ駆動部、
240 ズームレンズ、250 ズームレンズ駆動部、260 撮像素子、
270 対物レンズ系、300 処理部、310 A/D変換部、
320 前処理部、330 画像処理部、334 AF評価値算出部、
340 ミスト検出部、341 ミスト検出領域設定部、342 検出部、
346 フォーカスレンズ位置記録部、350 制御部、
360 フォーカス制御部、361 AF領域設定部、
362 AF評価値算出部、363 フォーカスレンズ制御部、
364 フォーカスレンズ位置記録部、400 表示部、
500 外部I/F部、600 光源部、610 白色光源、
620 ライトガイドケーブル
Claims (20)
- 撮像部の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行うフォーカス制御部と、
ミストの発生を検出するミスト検出部と、
を含み、
前記フォーカス制御部は、
前記ミスト検出部により前記ミストの発生が検出された場合、前記フォーカス制御における合焦動作の実行を停止することを特徴とする内視鏡装置。 - 請求項1において、
前記ミスト検出部は、
前記撮像部により撮像された撮像画像から前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項2において、
前記ミスト検出部は、
前記撮像画像の輝度値に基づく第1評価値及び、前記撮像画像の彩度値に基づく第2評価値、前記撮像画像のコントラスト値に基づく第3評価値のうち、少なくとも2つ以上(その値を含む)の評価値をミスト評価値として求め、前記ミスト評価値に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項3において、
前記ミスト検出部は、
前記輝度値の時間変化を前記第1評価値として求め、前記彩度値の時間変化を前記第2評価値として求め、前記コントラスト値の時間変化を前記第3評価値として求めることを特徴とする内視鏡装置。 - 請求項4において、
前記ミスト検出部は、
前記第1評価値の極大値と前記第2評価値の極小値と前記第3評価値の極小値とを検出し、前記第1評価値の極大値を検出した第1タイミングと前記第2評価値の極小値を検出した第2タイミングと前記第3評価値の極小値を検出した第3タイミングとが一致したと判断した場合に、前記ミストが発生したと判定することを特徴とする内視鏡装置。 - 請求項4において、
前記ミスト検出部は、
前記第1評価値が第1所定閾値よりも大きく、前記第2評価値が第2所定閾値よりも小さく、前記第3評価値が第3所定閾値よりも小さい場合に、前記ミストが発生したと判定することを特徴とする内視鏡装置。 - 請求項2において、
前記フォーカス制御部は、
前記合焦動作における合焦度合いを評価するためのフォーカス評価値を、前記撮像画像の所定周波数帯域の成分に基づいて求め、
前記ミスト検出部は、
前記所定周波数帯域よりも低い周波数帯域の成分に基づいて、前記ミストの発生を検出するためのミスト評価値を求めることを特徴とする内視鏡装置。 - 請求項2において、
前記撮像部が撮像する被写体に照射される照明の光量を制御する光量制御部を含み、
前記ミスト検出部は、
前記照明の光量に基づいて前記撮像画像の画素値を補正し、前記補正した画素値に基づいて、前記ミストの発生を検出するためのミスト評価値を求めることを特徴とする内視鏡装置。 - 請求項2において、
前記フォーカス制御部は、
前記撮像画像にフォーカス評価値検出領域を設定し、前記合焦動作における合焦度合いを評価するためのフォーカス評価値を前記フォーカス評価値検出領域から求め、
前記ミスト検出部は、
前記フォーカス評価値検出領域を内包するミスト検出領域を設定し、前記ミストの発生を検出するためのミスト評価値を前記ミスト検出領域の画像から求めることを特徴とする内視鏡装置。 - 請求項9において、
前記ミスト検出部は、
前記フォーカス評価値検出領域に対応する第1のブロック領域と、前記フォーカス評価値検出領域外の第2~第nのブロック領域(nは2以上(その値を含む)の自然数)とを前記ミスト検出領域として設定し、前記第1~第nのブロック領域の画像から前記ミスト評価値を求めることを特徴とする内視鏡装置。 - 請求項2において、
前記ミスト検出部は、
複数のブロック領域をミスト検出領域として設定し、前記複数のブロック領域の各ブロック領域について輝度値の平均値と彩度値の平均値とコントラスト値の平均値を算出し、前記輝度値の平均値と前記彩度値の平均値と前記コントラスト値の平均値に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項11において、
前記ミスト検出部は、
前記輝度値の平均値を前記複数のブロック領域で加算して第1評価値を求め、前記彩度値の平均値を前記複数のブロック領域で加算して第2評価値を求め、前記コントラスト値の平均値を前記複数のブロック領域で加算して第3評価値を求め、前記第1~第3の評価値に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項11において、
前記ミスト検出部は、
前記複数のブロック領域における前記輝度値の平均値のうち最大値を第1評価値とし求め、前記複数のブロック領域における前記彩度値の平均値のうち最大値を第2評価値とし求め、前記複数のブロック領域における前記コントラスト値の平均値のうち最大値を第3評価値として求め、前記第1~第3の評価値に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項11において、
前記ミスト検出部は、
前記複数のブロック領域における前記輝度値の平均値の標準偏差を第1評価値として求め、前記複数のブロック領域における前記彩度値の平均値の標準偏差を第2評価値として求め、前記複数のブロック領域における前記コントラスト値の平均値の標準偏差を第3評価値として求め、前記第1~第3の評価値に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項1において、
前記ミスト検出部は、
ミストの消失を検出し、
前記フォーカス制御部は、
前記ミスト検出部により前記ミストの消失が検出された場合、前記フォーカス制御における前記合焦動作の実行を再開することを特徴とする内視鏡装置。 - 請求項15において、
前記ミスト検出部は、
前記撮像部により撮像された撮像画像の輝度値の時間変化である第1評価値及び、前記撮像画像の彩度値の時間変化である第2評価値、前記撮像画像のコントラスト値の時間変化である第3評価値のうち、少なくとも2つ以上(その値を含む)の評価値をミスト評価値として求め、前記ミスト評価値に基づいて前記ミストの消失を検出することを特徴とする内視鏡装置。 - 請求項2において、
前記フォーカス制御部は、
前記フォーカス制御における合焦動作の実行を停止する際に、前記ミスト検出部により前記ミストの発生が検出されたタイミングよりも所定時間前の前記フォーカスレンズの位置に前記フォーカスレンズを移動させることを特徴とする内視鏡装置。 - 請求項1において、
前記ミスト検出部は、
処置具の通電状態に基づいて前記ミストの発生を検出することを特徴とする内視鏡装置。 - 請求項2又は18において、
前記ミストは、処置具による処置時に被写体から発生するミストであり、
前記フォーカス制御部は、
前記フォーカス制御における合焦動作の実行を停止する際に、前記処置具が通電状態となったタイミングでの前記フォーカスレンズの位置に前記フォーカスレンズを移動させることを特徴とする内視鏡装置。 - 撮像部の光学系が有するフォーカスレンズの位置を制御してフォーカス制御を行い、
ミストの発生を検出し、
前記ミストの発生が検出された場合、前記フォーカス制御における合焦動作の実行を停止することを特徴とする内視鏡装置の作動方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201580005024.9A CN105934190B (zh) | 2014-01-22 | 2015-01-20 | 内窥镜装置及内窥镜装置的动作方法 |
| EP15740320.5A EP3097841A4 (en) | 2014-01-22 | 2015-01-20 | Endoscope device and method for operating endoscope device |
| US15/213,702 US10321802B2 (en) | 2014-01-22 | 2016-07-19 | Endoscope apparatus and method for operating endoscope apparatus |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-009202 | 2014-01-22 | ||
| JP2014009202A JP6453543B2 (ja) | 2014-01-22 | 2014-01-22 | 内視鏡装置及び内視鏡装置の作動方法 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US15/213,702 Continuation US10321802B2 (en) | 2014-01-22 | 2016-07-19 | Endoscope apparatus and method for operating endoscope apparatus |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015111560A1 true WO2015111560A1 (ja) | 2015-07-30 |
Family
ID=53681364
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/051305 WO2015111560A1 (ja) | 2014-01-22 | 2015-01-20 | 内視鏡装置及び内視鏡装置の作動方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10321802B2 (ja) |
| EP (1) | EP3097841A4 (ja) |
| JP (1) | JP6453543B2 (ja) |
| CN (1) | CN105934190B (ja) |
| WO (1) | WO2015111560A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017072860A1 (ja) * | 2015-10-27 | 2017-05-04 | オリンパス株式会社 | 撮像装置、内視鏡装置及び撮像装置の作動方法 |
| WO2021161369A1 (ja) * | 2020-02-10 | 2021-08-19 | オリンパス株式会社 | 内視鏡装置、情報処理方法及びプログラム |
| WO2021250777A1 (ja) * | 2020-06-09 | 2021-12-16 | オリンパス株式会社 | 内視鏡システム及び内視鏡のフォーカス制御方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6188992B1 (ja) * | 2015-09-28 | 2017-08-30 | オリンパス株式会社 | 画像解析装置、画像解析システム、画像解析装置の作動方法 |
| JP6753081B2 (ja) | 2016-03-09 | 2020-09-09 | ソニー株式会社 | 内視鏡手術システム、画像処理方法及び医療用観察システム |
| WO2018116371A1 (ja) * | 2016-12-20 | 2018-06-28 | オリンパス株式会社 | 自動焦点制御装置、内視鏡装置及び自動焦点制御装置の作動方法 |
| CN110392546B (zh) * | 2017-03-07 | 2022-09-02 | 索尼公司 | 信息处理设备、辅助系统和信息处理方法 |
| JP7159577B2 (ja) * | 2018-03-20 | 2022-10-25 | ソニーグループ株式会社 | 内視鏡システム、制御方法、情報処理装置、およびプログラム |
| CN109029917A (zh) * | 2018-05-29 | 2018-12-18 | 力帆实业(集团)股份有限公司 | 一种灯具防起雾性能测试方法 |
| CN111489296A (zh) * | 2019-01-29 | 2020-08-04 | 杭州海康慧影科技有限公司 | 一种内窥镜图像的除雾方法、装置及电子设备 |
| JP7251425B2 (ja) * | 2019-09-20 | 2023-04-04 | 株式会社デンソーテン | 付着物検出装置および付着物検出方法 |
| CN112954142B (zh) * | 2019-11-22 | 2022-06-28 | 宝山钢铁股份有限公司 | 一种智能除尘除雾摄像机防护罩及其智能识别方法 |
| JP7044140B2 (ja) * | 2020-08-20 | 2022-03-30 | ソニーグループ株式会社 | 手術支援システム、画像処理方法及び情報処理装置 |
| CN114324256A (zh) * | 2021-12-21 | 2022-04-12 | 福耀玻璃工业集团股份有限公司 | 一种实时起雾测试装置及实时起雾测试方法 |
| WO2023166742A1 (ja) * | 2022-03-04 | 2023-09-07 | オリンパス株式会社 | 画像処理装置、処置システムおよび画像処理方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11309156A (ja) * | 1998-04-27 | 1999-11-09 | Olympus Optical Co Ltd | 排煙装置 |
| JP2006208818A (ja) | 2005-01-28 | 2006-08-10 | Sony Corp | フォーカス制御装置、フォーカス制御方法 |
| JP2006280425A (ja) * | 2005-03-31 | 2006-10-19 | Fujinon Corp | 内視鏡装置 |
| JP2010176061A (ja) | 2009-02-02 | 2010-08-12 | Casio Computer Co Ltd | 撮影装置、及びプログラム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5953819A (ja) * | 1982-09-21 | 1984-03-28 | Minolta Camera Co Ltd | 防水カメラ |
| US6268885B1 (en) * | 1996-01-31 | 2001-07-31 | Canon Kabushiki Kaisha | Optical apparatus for correcting focus based on temperature and humidity |
| JP3992992B2 (ja) * | 2002-02-19 | 2007-10-17 | 株式会社リコー | 被写体像取得装置 |
| JP4370092B2 (ja) * | 2002-03-27 | 2009-11-25 | オリンパス株式会社 | 光学特性可変光学素子の制御方法及びその制御方法による制御手段を備えた光学装置。 |
| US7176344B2 (en) * | 2002-09-06 | 2007-02-13 | Sca Hygiene Products Ab | Sensoring absorbing article |
| JP4678372B2 (ja) * | 2004-06-29 | 2011-04-27 | 株式会社ニコン | 管理方法及び管理システム、並びにプログラム |
| US20070027362A1 (en) * | 2005-07-27 | 2007-02-01 | Olympus Medical Systems Corp. | Infrared observation system |
| US8725330B2 (en) * | 2010-06-02 | 2014-05-13 | Bryan Marc Failing | Increasing vehicle security |
| JP5440573B2 (ja) * | 2010-08-31 | 2014-03-12 | カシオ計算機株式会社 | 画像処理システム、サーバー、画像処理方法並びに画像処理プログラム |
| JP5953049B2 (ja) * | 2012-01-24 | 2016-07-13 | オリンパス株式会社 | 内視鏡システム |
| US8801141B2 (en) * | 2012-04-27 | 2014-08-12 | Canon Kabushiki Kaisha | Recording apparatus, detection method, and storage medium |
-
2014
- 2014-01-22 JP JP2014009202A patent/JP6453543B2/ja active Active
-
2015
- 2015-01-20 WO PCT/JP2015/051305 patent/WO2015111560A1/ja active Application Filing
- 2015-01-20 CN CN201580005024.9A patent/CN105934190B/zh active Active
- 2015-01-20 EP EP15740320.5A patent/EP3097841A4/en not_active Withdrawn
-
2016
- 2016-07-19 US US15/213,702 patent/US10321802B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11309156A (ja) * | 1998-04-27 | 1999-11-09 | Olympus Optical Co Ltd | 排煙装置 |
| JP2006208818A (ja) | 2005-01-28 | 2006-08-10 | Sony Corp | フォーカス制御装置、フォーカス制御方法 |
| JP2006280425A (ja) * | 2005-03-31 | 2006-10-19 | Fujinon Corp | 内視鏡装置 |
| JP2010176061A (ja) | 2009-02-02 | 2010-08-12 | Casio Computer Co Ltd | 撮影装置、及びプログラム |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3097841A4 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017072860A1 (ja) * | 2015-10-27 | 2017-05-04 | オリンパス株式会社 | 撮像装置、内視鏡装置及び撮像装置の作動方法 |
| JPWO2017072860A1 (ja) * | 2015-10-27 | 2018-10-11 | オリンパス株式会社 | 撮像装置、内視鏡装置及び撮像装置の作動方法 |
| US10945591B2 (en) | 2015-10-27 | 2021-03-16 | Olympus Corporation | Image capturing device, endoscope apparatus, and method for operating image capturing device |
| WO2021161369A1 (ja) * | 2020-02-10 | 2021-08-19 | オリンパス株式会社 | 内視鏡装置、情報処理方法及びプログラム |
| WO2021250777A1 (ja) * | 2020-06-09 | 2021-12-16 | オリンパス株式会社 | 内視鏡システム及び内視鏡のフォーカス制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3097841A4 (en) | 2017-11-15 |
| CN105934190A (zh) | 2016-09-07 |
| JP6453543B2 (ja) | 2019-01-16 |
| US20160324398A1 (en) | 2016-11-10 |
| CN105934190B (zh) | 2019-03-12 |
| EP3097841A1 (en) | 2016-11-30 |
| US10321802B2 (en) | 2019-06-18 |
| JP2015136470A (ja) | 2015-07-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015111560A1 (ja) | 内視鏡装置及び内視鏡装置の作動方法 | |
| US10574874B2 (en) | Endoscope apparatus, method for controlling endoscope apparatus, and information storage device | |
| US10129454B2 (en) | Imaging device, endoscope apparatus, and method for controlling imaging device | |
| US11962887B2 (en) | Image processing apparatus using information of position gazed at by user, imaging apparatus, and control method | |
| JP5149467B2 (ja) | 内視鏡装置 | |
| US10213093B2 (en) | Focus control device, endoscope apparatus, and method for controlling focus control device | |
| US20140307072A1 (en) | Image processing device, image processing method, and information storage device | |
| JP6533284B2 (ja) | フォーカス制御装置、撮像装置、内視鏡システム、フォーカス制御装置の制御方法 | |
| US11141050B2 (en) | Autofocus control device, endoscope apparatus, and operation method of autofocus control device | |
| US8823866B2 (en) | Image pickup apparatus, method of controlling the same, and storage medium | |
| JP5953049B2 (ja) | 内視鏡システム | |
| US9509896B2 (en) | Apparatus, imaging method, and focus control apparatus to control autofocus based on contrast signal | |
| US10945591B2 (en) | Image capturing device, endoscope apparatus, and method for operating image capturing device | |
| US9215365B2 (en) | Imaging apparatus and imaging method | |
| WO2013061939A1 (ja) | 内視鏡装置及びフォーカス制御方法 | |
| JP7235608B2 (ja) | 光源制御装置、医療用観察システム、光源制御方法およびプログラム | |
| US11974040B2 (en) | Endoscope processor, storage medium, and control method of focusing lens | |
| JP2016109975A (ja) | 撮像装置及び撮像方法 | |
| WO2014203625A1 (ja) | 内視鏡システム、内視鏡システムの制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15740320 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REEP | Request for entry into the european phase |
Ref document number: 2015740320 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2015740320 Country of ref document: EP |