WO2013118601A1 - 駆動装置およびレンズユニット - Google Patents
駆動装置およびレンズユニット Download PDFInfo
- Publication number
- WO2013118601A1 WO2013118601A1 PCT/JP2013/051741 JP2013051741W WO2013118601A1 WO 2013118601 A1 WO2013118601 A1 WO 2013118601A1 JP 2013051741 W JP2013051741 W JP 2013051741W WO 2013118601 A1 WO2013118601 A1 WO 2013118601A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- location
- shape memory
- memory alloy
- alloy wire
- fixed
- Prior art date
Links
Images




























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/06—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using expansion or contraction of bodies due to heating, cooling, moistening, drying or the like
- F03G7/065—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for using expansion or contraction of bodies due to heating, cooling, moistening, drying or the like using a shape memory element
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/08—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted to co-operate with a remote control mechanism
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B7/00—Mountings, adjusting means, or light-tight connections, for optical elements
- G02B7/02—Mountings, adjusting means, or light-tight connections, for optical elements for lenses
- G02B7/04—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification
- G02B7/09—Mountings, adjusting means, or light-tight connections, for optical elements for lenses with mechanism for focusing or varying magnification adapted for automatic focusing or varying magnification
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B5/00—Adjustment of optical system relative to image or object surface other than for focusing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/55—Optical parts specially adapted for electronic image sensors; Mounting thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/681—Motion detection
- H04N23/6812—Motion detection based on additional sensors, e.g. acceleration sensors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/60—Control of cameras or camera modules
- H04N23/68—Control of cameras or camera modules for stable pick-up of the scene, e.g. compensating for camera body vibrations
- H04N23/682—Vibration or motion blur correction
- H04N23/685—Vibration or motion blur correction performed by mechanical compensation
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0007—Movement of one or more optical elements for control of motion blur
- G03B2205/0015—Movement of one or more optical elements for control of motion blur by displacing one or more optical elements normal to the optical axis
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03B—APPARATUS OR ARRANGEMENTS FOR TAKING PHOTOGRAPHS OR FOR PROJECTING OR VIEWING THEM; APPARATUS OR ARRANGEMENTS EMPLOYING ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ACCESSORIES THEREFOR
- G03B2205/00—Adjustment of optical system relative to image or object surface other than for focusing
- G03B2205/0053—Driving means for the movement of one or more optical element
- G03B2205/0076—Driving means for the movement of one or more optical element using shape memory alloys
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Lens Barrels (AREA)
- Adjustment Of Camera Lenses (AREA)
Abstract
Description
他の形態において、2本の上記形状記憶合金線は、設定された軸に対して、線対称となる位置に配置されている。
形状記憶合金線として、上記第1の箇所と上記第8の箇所との間に架設された第1の形状記憶合金線と、上記第4の箇所と上記第5の箇所との間に架設された第2の形状記憶合金線と、上記第2の箇所と上記第5の箇所との間に架設された第3の形状記憶合金線と、上記第1の箇所と上記第6の箇所との間に架設された第4の形状記憶合金線と、上記第3の箇所と上記第6の箇所との間に架設された第5の形状記憶合金線と、上記第2の箇所と上記第7の箇所との間に架設された第6の形状記憶合金線と、上記第4の箇所と上記第7の箇所との間に架設された第7の形状記憶合金線と、上記第3の箇所と上記第8の箇所との間に架設された第8の形状記憶合金線と、を有する。
他の形態において、上記支持部材と上記ベース部材との接合部において、上記支持部材と上記ベース部材との間には、上記ベース部材よりも弾性が小さい低弾性部材が設けられている。
図1を参照して、本発明に基づいた駆動装置の構成および移動原理について説明する。図1は、実施の形態における駆動装置の構成および駆動原理を示す第1模式図であり、(A)は初期状態(移動前)を示す図、(B)は移動後を示す図である。
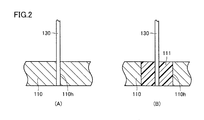
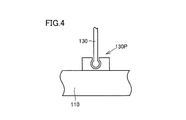
支持部材130とベースプレート110との接合について、図2から図4を参照して説明する。図2は、支持部材130のベースプレート110への接合部の構造を示す模式図であり、(A)は、ベースプレート110に支持部材130を直接接合させた構造を示す図、(B)は、ベースプレート110と支持部材130との間に低弾性部材を設けた場合の構造を示す図である。
図5および図6を参照して、実施の形態1における駆動装置100Aについて説明する。図5は、本実施の形態における駆動装置100Aを示す斜視図、図6は、本実施の形態における駆動装置100Aを示す平面図である。この駆動装置100Aには、上記で説明した移動原理が適用される。
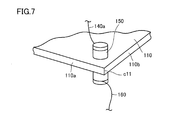
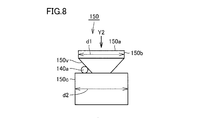
次に、第1駆動部材140aから第4駆動部材140dの固定構造について、図7から図15を参照して説明する。図7は、図5中のVIIで囲まれた領域の部分拡大斜視図であり、ベースプレートに設けられる各駆動部材の固定構造を示す図、図8から図15は、駆動部材の固定構造を示す第1から第8図である。
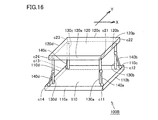
次に、図16を参照して、実施の形態2における駆動装置100Bについて説明する。図16は、本実施の形態における駆動装置100Bを示す斜視図である。なお、上記実施の形態1における駆動装置100Aと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
次に、図17を参照して、実施の形態3における駆動装置100Cについて説明する。図17は、本実施の形態における駆動装置100Cを示す平面図である。なお、上記実施の形態1における駆動装置100Aと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
具体的には、被駆動プレート120の第1辺120a側において、第1駆動部材140a1の一端が被駆動プレート120の第1角部c21(第1の箇所)の近傍に固定され、第1駆動部材140a1の他端がベースプレート110の第4角部c14(第8の箇所)の近傍に固定されている。したがって、第1駆動部材140a1は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜するように、ベースプレート110と被駆動プレート120との間に架設されている。
また、被駆動プレート120の第1辺120a側において、第2駆動部材140a2の一端が被駆動プレート120の第4角部c24(第4の箇所)の近傍に固定され、第2駆動部材140a2の他端がベースプレート110の第1角部c11(第5の箇所)の近傍に固定されている。したがって、第2駆動部材140a2は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜する(第1駆動部材140a1とは交差する)ように、ベースプレート110と被駆動プレート120との間に架設されている。
同様に、被駆動プレート120の第2辺120b側において、第3駆動部材140b1の一端が被駆動プレート120の第2角部c22(第2の箇所)の近傍に固定され、第3駆動部材140b1の他端がベースプレート110の第1角部c11(第5の箇所)の近傍に固定されている。したがって、第3駆動部材140b1は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜するように、ベースプレート110と被駆動プレート120との間に架設されている。
また、被駆動プレート120の第2辺120b側において、第4駆動部材140b2の一端が被駆動プレート120の第1角部c21(第1の箇所)の近傍に固定され、第4駆動部材140b2の他端がベースプレート110の第2角部c12(第6の箇所)の近傍に固定されている。したがって、第4駆動部材140b2は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜する(第3駆動部材140b1とは交差する)ように、ベースプレート110と被駆動プレート120との間に架設されている。
同様に、被駆動プレート120の第3辺120c側において、第5駆動部材140c1の一端が被駆動プレート120の第3角部c23(第3の箇所)の近傍に固定され、第5駆動部材140c1の他端がベースプレート110の第2角部c12(第6の箇所)の近傍に固定されている。したがって、第5駆動部材140c1は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜するように、ベースプレート110と被駆動プレート120との間に架設されている。
また、被駆動プレート120の第3辺120c側において、第6駆動部材140c2の一端が被駆動プレート120の第2角部c22(第2の箇所)の近傍に固定され、第6駆動部材140c2の他端がベースプレート110の第3角部c13(第7の箇所)の近傍に固定されている。したがって、第6駆動部材140c2は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜する(第5駆動部材140c1とは交差する)ように、ベースプレート110と被駆動プレート120との間に架設されている。
同様に、被駆動プレート120の第4辺120d側において、第7駆動部材140d1の一端が被駆動プレート120の第4角部c24(第4の箇所)の近傍に固定され、第7駆動部材140d1の他端がベースプレート110の第3角部c13(第7の箇所)の近傍に固定されている。したがって、第7駆動部材140d1は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜するように、ベースプレート110と被駆動プレート120との間に架設されている。
また、被駆動プレート120の第4辺120d側において、第8駆動部材140d2の一端が被駆動プレート120の第3角部c23(第3の箇所)の近傍に固定され、第8駆動部材140d2の他端がベースプレート110の第4角部c14(第8の箇所)の近傍に固定されている。したがって、第8駆動部材140d2は、被駆動プレート120の一端側からベースプレート110の反対側に向けて傾斜する(第7駆動部材140d1とは交差する)ように、ベースプレート110と被駆動プレート120との間に架設されている。
上記構成からなる駆動装置100Cを用いた場合の駆動装置の位置決め方法について、図18から図20を参照して説明する。図18から図20は、駆動装置100Cの位置決め方法を示す第1から第3模式図である。
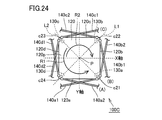
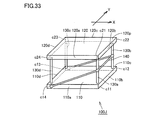
ここで、図21から図24を参照して、被駆動プレート120の回転規制について説明する。図21および図22は、回転制御を説明する第1および第2模式図であり、それぞれ(A)は平面図、(B)は側面図である。図23は、実施の形態3における回転制御を説明する第1図であり、(A)は平面図、(B)は側面図である。図24は、実施の形態3における回転制御を説明する第2図(平面図)である。
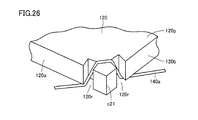
次に、図25および図26を参照して、実施の形態4における駆動装置100Dについて説明する。図25は、本実施の形態における駆動装置100Dを示す斜視図、図26は、図25中のXXVIで囲まれた領域の部分拡大斜視図であり、駆動部材である形状記憶合金線の被駆動プレートへの固定構造を示す図である。なお、上記実施の形態3における駆動装置100Cと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
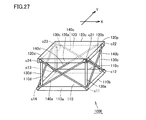
次に、図27を参照して、実施の形態5における駆動装置100Eについて説明する。図27は、本実施の形態における駆動装置100Eを示す斜視図である。なお、上記実施の形態3における駆動装置100Cと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
次に、図28を参照して、実施の形態6における駆動装置100Fについて説明する。図28は、本実施の形態における駆動装置100Fを示す斜視図である。なお、上記実施の形態3における駆動装置100Cと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
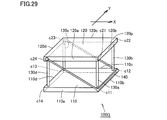
次に、図29を参照して、実施の形態7における駆動装置100Gについて説明する。図29は、本実施の形態における駆動装置100Gを示す斜視図である。なお、上記実施の形態3における駆動装置100Cと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
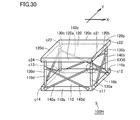
次に、図30および図31を参照して、実施の形態8における駆動装置100Hについて説明する。図30は、本実施の形態における駆動装置100Hを示す斜視図、図31は、図30中のXXXIで囲まれた領域の部分拡大斜視図であり、形状記憶合金線の支持部材への固定構造を示す図である。なお、上記実施の形態4における駆動装置100Dと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
次に、図32を参照して、実施の形態9における駆動装置100Iについて説明する。図32は、本実施の形態における駆動装置100Iを示す斜視図である。なお、上記実施の形態5における駆動装置100Eと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
次に、図33を参照して、実施の形態10における駆動装置100Jについて説明する。図33は、本実施の形態における駆動装置100Jを示す斜視図である。なお、上記実施の形態6における駆動装置100Fと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
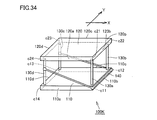
次に、図34を参照して、実施の形態11における駆動装置100Kについて説明する。図34は、本実施の形態における駆動装置100Kを示す斜視図である。なお、上記実施の形態7における駆動装置100Gと同一または相当箇所については、同一の参照番号を付し、重複する説明は繰り返さない。
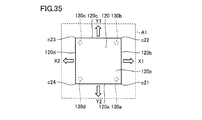
本実施の形態では、図35および図36を参照して、上記各実施の形態における被駆動プレート120の初期位置の設定について説明する。図35および図36は、被駆動プレートの初期位置状態を示す第1および第2の平面図である。
本実施の形態では、図37を参照して、上記各実施の形態におけるベースプレート110とは異なるベースプレート構造を採用した駆動装置100Lについて説明する。図37は、本実施の形態における駆動装置100Lを示す斜視図である。なお、図37では、図25に示す実施の形態4の駆動装置100Dに対して本実施の形態のベースプレート構造を採用した場合について説明しているが、他の実施の形態の駆動装置に対しても、本実施の形態のベースプレート構造を適用することは可能である。
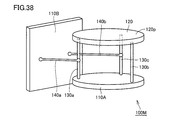
図38を参照して、本実施の形態における駆動装置100Mについて説明する。図38は、本実施の形態における駆動装置100Mを示す斜視図である。
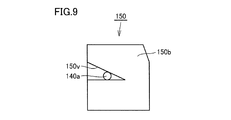
図39を参照して、本実施の形態における、上述した駆動装置を用いたレンズユニット200Aについて説明する。図39は、本実施の形態におけるレンズユニット200Aを示す斜視図である。
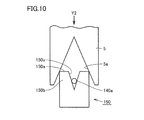
図40を参照して、本実施の形態における、上述した駆動装置を用いたレンズユニット200Bについて説明する。図40は、本実施の形態におけるレンズユニット200Bを示す斜視図である。
次に、図41から図45を参照して、上記レンズユニットをジャイロが設けられた機器に搭載した場合の手ぶれ補正について説明する。図41は、レンズユニットにおける手ぶれ補正制御を説明する機能ブロック図、図42は、レンズユニットにおける手ぶれ補正制御を説明するフロー図である。図43から図45は、レンズユニットにおける手ぶれ補正を説明する第1から第3斜視図、なお、レンズユニットには、図39に示す実施の形態15におけるレンズユニット200Aを用いた場合について説明する。なお、図40に示す実施の形態16におけるレンズユニット200Bを用いた場合についても同様である。
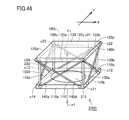
図46を参照して、本実施の形態における、上述した駆動装置を用いたレンズユニット200Cについて説明する。図46は、本実施の形態におけるレンズユニット200Cを示す斜視図である。
Claims (22)
- ベース部材と、
前記ベース部材に対して所定の間隔を隔てて配置される被駆動部材と、
前記ベース部材と前記被駆動部材とを連結し、前記被駆動部材の移動の前後において、前記ベース部材と前記被駆動部材とが前記所定の間隔をほぼ維持するように、前記被駆動部材を支持する支持部材と、
前記被駆動部材が移動の前後において平行移動するように、前記被駆動部材を駆動する駆動部材とを備え、
前記駆動部材は、線状の形状記憶合金線を伸縮させることで、前記被駆動部材を移動させる、駆動装置。 - 前記駆動部材は、
前記ベース部材と前記被駆動部材との間に架設されている、請求項1に記載の駆動装置。 - 前記駆動部材の両端部が、前記ベース部材に固定され、
前記駆動部材の中間領域が、前記被駆動部材に固定されている、請求項2に記載の駆動装置。 - 前記駆動部材の両端部が、前記被駆動部材に固定され、
前記駆動部材の中間領域が、前記ベース部材に固定されている、請求項2に記載の駆動装置。 - 前記駆動部材は、前記ベース部材と前記支持部材との間に架設されている、請求項1に記載の駆動装置。
- 前記駆動部材の両端部が、前記ベース部材に固定され、
前記駆動部材の中間領域が、前記支持部材に固定されている、請求項5に記載の駆動装置。 - 前記駆動部材の両端部が、前記支持部材に固定され、
前記駆動部材の中間領域が、前記ベース部材に固定されている、請求項5に記載の駆動装置。 - 前記駆動部材は、2本の前記形状記憶合金線を含む、請求項1から7のいずれかに記載の駆動装置。
- 2本の前記形状記憶合金線は、設定された軸に対して、線対称となる位置に配置されている、請求項8に記載の駆動装置。
- 2本の前記形状記憶合金線の一方の端部は、前記ベース部材の互いに異なる箇所に固定され、2本の前記形状記憶合金線の他方の端部は、前記被駆動部材の同一箇所に固定され、または、2本の前記形状記憶合金線の一方の端部は、前記被駆動部材の互いに異なる箇所に固定され、2本の前記形状記憶合金線の他方の端部は、前記ベース部材の同一箇所に固定されている、請求項9に記載の駆動装置。
- 2本の前記形状記憶合金線は一本化されており、
前記形状記憶合金線の両端部が、前記ベース部材の互いに異なる箇所に固定され、前記形状記憶合金線の中間領域が、前記被駆動部材に固定され、または、
前記形状記憶合金線の両端部が、前記被駆動部材の互いに異なる箇所に固定され、前記形状記憶合金線の中間領域が、前記ベース部材に固定されている、請求項10に記載の駆動装置。 - 前記被駆動部材は第1の箇所と、第2の箇所と、前記被駆動部材の中心を挟んで前記第1の箇所と対向する第3の箇所と、前記被駆動部材の中心を挟んで前記第2の箇所と対向する第4箇所と、を有し、
前記ベース部材は、前記第1の箇所に対向する第5の箇所と、前記第2の箇所に対向する第6の箇所と、前記第3の箇所に対向する第7の箇所と、前記第4の箇所に対向する第8の箇所と、を有し、
前記形状記憶合金線として、
前記第1の箇所と前記第8の箇所との間に架設された第1の形状記憶合金線と、
前記第4の箇所と前記第5の箇所との間に架設された第2の形状記憶合金線と、
前記第2の箇所と前記第5の箇所との間に架設された第3の形状記憶合金線と、
前記第1の箇所と前記第6の箇所との間に架設された第4の形状記憶合金線と、
前記第3の箇所と前記第6の箇所との間に架設された第5の形状記憶合金線と、
前記第2の箇所と前記第7の箇所との間に架設された第6の形状記憶合金線と、
前記第4の箇所と前記第7の箇所との間に架設された第7の形状記憶合金線と、
前記第3の箇所と前記第8の箇所との間に架設された第8の形状記憶合金線と、
を有する請求項1または2に記載の駆動装置。 - 前記第1の形状記憶合金線と前記第4の形状記憶合金線とが一本化され、
前記第2の形状記憶合金線と前記第7の形状記憶合金線とが一本化され、
前記第3の形状記憶合金線と前記第6の形状記憶合金線とが一本化され、
前記第4の形状記憶合金線と前記第5の形状記憶合金線とが一本化された、
請求項12に記載の駆動装置。 - 前記ベース部材は第1の箇所と、第2の箇所と、前記ベース部材の中心を挟んで前記第1の箇所と対向する第3の箇所と、前記ベース部材の中心を挟んで前記第2の箇所と対向する第4箇所と、を有し、
前記支持部材として、
前記第1の箇所と前記被駆動部材とを連結する第1支持部材と、
前記第2の箇所と前記被駆動部材とを連結する第2支持部材と、
前記第3の箇所と前記被駆動部材とを連結する第3支持部材と、
前記第4の箇所と前記被駆動部材とを連結する第4支持部材と、を有し、
前記線状の形状記憶合金線として、
一方の端部が前記第4の箇所に固定され他方の端部が前記第2の箇所に固定され中間領域が前記第1支持部材に固定された第1の形状記憶合金線と、
一方の端部が前記第1の箇所に固定され他方の端部が前記第3の箇所に固定され中間領域が前記第2支持部材に固定された第2の形状記憶合金線と、
一方の端部が前記第2の箇所に固定され他方の端部が前記第4の箇所に固定され中間領域が前記第3支持部材に固定された第3の形状記憶合金線と、
一方の端部が前記第3の箇所に固定され他方の端部が前記第1の箇所に固定され中間領域が前記第4支持部材に固定された第4の形状記憶合金線と、
を有する請求項1または2に記載の駆動装置。 - 前記支持部材は、線材である、請求項1から9のいずれかに記載の駆動装置。
- 前記支持部材と前記ベース部材との接合部において、
前記支持部材と前記ベース部材との間には、前記ベース部材よりも弾性が小さい低弾性部材が設けられている、請求項1から10のいずれかに記載の駆動装置。 - 前記支持部材と前記ベース部材との接合部において、
前記支持部材と前記ベース部材との間には、回転軸受が設けられている、請求項1から10のいずれかに記載の駆動装置。 - 前記被駆動部材は、初期位置として、前記被駆動部材の移動範囲の中心位置に位置している、請求項1から12のいずれかに記載の駆動装置。
- 前記被駆動部材は、初期位置として、前記被駆動部材の移動範囲の中心からずれた位置に位置している、請求項1から12のいずれかに記載の駆動装置。
- 前記被駆動部材は、平面を有し、
前記駆動部材は、前記平面が移動の前後において平行移動するように、前記被駆動部材を駆動する、請求項1に記載の駆動装置。 - 請求項1~20のいずれかに記載の駆動装置と、
前記被駆動部材に設けられるレンズと、
前記ベース部材上において、前記レンズを通過した光の結像位置に配置される撮像素子と、を備え、
前記形状記憶合金線を伸縮させて前記レンズを移動させることで、前記撮像素子に対する前記レンズの結像位置を変更可能とする、レンズユニット。 - 請求項1~20のいずれかに記載の駆動装置と、
前記ベース部材に設けられるレンズと、
前記被駆動部材上において、前記レンズを通過した光の結像位置に配置される撮像素子と、を備え、
前記形状記憶合金線を伸縮させて前記撮像素子を移動させることで、前記撮像素子に対する前記レンズの結像位置を変更可能とする、レンズユニット。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/377,183 US20150322929A1 (en) | 2012-02-07 | 2013-01-28 | Drive device and lens unit |
| EP13746425.1A EP2813877A4 (en) | 2012-02-07 | 2013-01-28 | DRIVE DEVICE AND LENS GROUP |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012-023941 | 2012-02-07 | ||
| JP2012023941 | 2012-02-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2013118601A1 true WO2013118601A1 (ja) | 2013-08-15 |
Family
ID=48947367
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2013/051741 WO2013118601A1 (ja) | 2012-02-07 | 2013-01-28 | 駆動装置およびレンズユニット |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20150322929A1 (ja) |
| EP (1) | EP2813877A4 (ja) |
| JP (1) | JPWO2013118601A1 (ja) |
| WO (1) | WO2013118601A1 (ja) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015518977A (ja) * | 2012-05-25 | 2015-07-06 | ケンブリッジ メカトロニクス リミテッド | 形状記憶合金作動装置 |
| US9175671B2 (en) | 2012-04-12 | 2015-11-03 | Cambridge Mechatronics Limited | SMA actuation apparatus |
| WO2016189314A1 (en) * | 2015-05-26 | 2016-12-01 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
| US9609219B2 (en) | 2012-11-27 | 2017-03-28 | Cambridge Mechatronics Limited | Suspension system for a camera lens element |
| US9753300B2 (en) | 2012-02-16 | 2017-09-05 | Cambridge Mechatronics Limited | Shape memory alloy actuation apparatus |
| JP2017207734A (ja) * | 2016-04-01 | 2017-11-24 | 台湾東電化股▲ふん▼有限公司 | カメラモジュールおよびそれを制御する方法 |
| KR20180003532A (ko) * | 2015-05-05 | 2018-01-09 | 액추에이터 솔루션스 게엠베하 | 틸트 모듈 부조립체 및 그것을 포함하는 광학 영상 안정장치 |
| KR20190037937A (ko) * | 2017-09-29 | 2019-04-08 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 |
| CN109725473A (zh) * | 2017-10-30 | 2019-05-07 | 台湾东电化股份有限公司 | 光学驱动机构 |
| CN109901275A (zh) * | 2017-12-08 | 2019-06-18 | 宁波舜宇光电信息有限公司 | 在光学组件上缠绕sma线的方法 |
| CN110199119A (zh) * | 2016-12-16 | 2019-09-03 | 哈钦森技术股份有限公司 | 光学图像稳定悬架中的传感器移位结构 |
| JP2020502591A (ja) * | 2016-12-13 | 2020-01-23 | アクチュエーター・ソリュ—ションズ・ゲーエムベーハー | 光学式手ブレ補正機構 |
| US10663753B2 (en) | 2015-09-29 | 2020-05-26 | Cambridge Mechatronics Limited | Shape memory alloy actuator arrangement |
| JP2020515881A (ja) * | 2016-12-16 | 2020-05-28 | ハッチンソン テクノロジー インコーポレイテッドHutchinson Technology Incorporated | 光学画像安定化サスペンションにおけるセンサシフト構造 |
| WO2021047595A1 (zh) * | 2019-09-11 | 2021-03-18 | 常州市瑞泰光电有限公司 | 镜头模组 |
| US11187916B2 (en) | 2015-10-28 | 2021-11-30 | Cambridge Mechatronics Limited | Camera assembly providing optical image stabilization |
| US11194115B1 (en) | 2020-09-02 | 2021-12-07 | Hutchinson Technology Incorporated | Guided autofocus assembly |
| US11454863B2 (en) | 2018-07-09 | 2022-09-27 | Samsung Electro-Mechanics Co., Ltd. | Camera module |
| GB2609866A (en) * | 2017-04-20 | 2023-02-15 | Cambridge Mechatronics Ltd | Continuous wiring of shape memory alloy actuators |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018029458A1 (en) * | 2016-08-08 | 2018-02-15 | Cambridge Mechatronics Limited | Dual camera apparatus |
| WO2019137048A1 (zh) * | 2018-01-12 | 2019-07-18 | 宁波舜宇光电信息有限公司 | 光学致动器及相应的摄像模组和摄像模组阵列 |
| DE102018118927B4 (de) * | 2018-08-03 | 2020-06-04 | Universität Stuttgart | Aktuatorvorrichtung zur multistabilen Positionierung |
| WO2020074914A1 (en) * | 2018-10-10 | 2020-04-16 | Cambridge Mechatronics Limited | Sma actuator assemblies |
| CN112865478B (zh) * | 2019-11-26 | 2022-01-28 | 华为技术有限公司 | 记忆合金马达模组及组装系统、组装方法 |
| KR20220081580A (ko) * | 2020-12-09 | 2022-06-16 | 엘지이노텍 주식회사 | 센서 구동 장치 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05104475A (ja) * | 1991-10-15 | 1993-04-27 | Matsushita Electric Ind Co Ltd | 多自由度アクチユエータ |
| JP2001227454A (ja) * | 2000-02-16 | 2001-08-24 | Rhythm Watch Co Ltd | 駆動装置およびからくり装置 |
| JP2005338298A (ja) * | 2004-05-25 | 2005-12-08 | Sumida Corporation | 振れ補正光学装置 |
| JP2007064063A (ja) * | 2005-08-30 | 2007-03-15 | Konica Minolta Opto Inc | 駆動装置及びこれを用いた撮像装置 |
| JP2007114585A (ja) | 2005-10-21 | 2007-05-10 | Fujifilm Corp | 像ぶれ補正装置及び撮像装置 |
| JP2007139965A (ja) * | 2005-11-16 | 2007-06-07 | Konica Minolta Opto Inc | 駆動装置 |
| JP2008079492A (ja) * | 2006-08-22 | 2008-04-03 | Seiko Instruments Inc | 圧電アクチュエータを用いた駆動装置及びこれを搭載した電子機器 |
| JP2009237535A (ja) * | 2008-03-25 | 2009-10-15 | Hon Hai Precision Industry Co Ltd | 撮像装置 |
| JP2011501245A (ja) | 2007-10-30 | 2011-01-06 | ケンブリッジ メカトロニクス リミテッド | 形状記憶合金駆動装置 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5335091A (en) * | 1991-12-31 | 1994-08-02 | Eastman Kodak Company | Apparatus for mechanically dithering a CCD array |
| US5305149A (en) * | 1993-03-22 | 1994-04-19 | Eastman Kodak Company | Zoom lens drive mechanism |
| JPH08136961A (ja) * | 1994-11-08 | 1996-05-31 | Minolta Co Ltd | 手ぶれ補正装置 |
| US5717960A (en) * | 1995-09-06 | 1998-02-10 | Nikon Corporation | Image vibration correcting device |
| CA2391746A1 (en) * | 1999-08-12 | 2001-02-22 | Roderick Macgregor | Shape-memory alloy actuators and control methods |
| US6945045B2 (en) * | 2001-10-01 | 2005-09-20 | Minolta Co., Ltd. | Driving apparatus |
| US7600301B2 (en) * | 2002-06-19 | 2009-10-13 | Telezygology, Inc. | Fixing and release systems and fastener networks |
| JP4639942B2 (ja) * | 2005-05-11 | 2011-02-23 | コニカミノルタオプト株式会社 | 振れ補正機構付き撮像装置 |
| JP4735060B2 (ja) * | 2005-06-06 | 2011-07-27 | コニカミノルタオプト株式会社 | 駆動装置および手振れ補正システム |
| WO2007018086A1 (ja) * | 2005-08-11 | 2007-02-15 | Konica Minolta Opto, Inc. | 駆動装置、レンズ鏡胴、撮像装置、レンズ駆動方法及び形状記憶合金の製造方法 |
| JP4740726B2 (ja) * | 2005-12-05 | 2011-08-03 | 株式会社タムロン | 平行移動装置およびこれを備えたアクチュエータ、レンズユニットおよびカメラ |
| US7953319B2 (en) * | 2007-04-04 | 2011-05-31 | Konica Minolta Opto, Inc. | Position controller, driving mechanism and image pickup system |
| JP4957366B2 (ja) * | 2007-05-09 | 2012-06-20 | コニカミノルタアドバンストレイヤー株式会社 | カメラモジュールおよびカメラモジュールの駆動方法 |
| US8059951B2 (en) * | 2007-06-20 | 2011-11-15 | Panasonic Corporation | Image stabilizing device and camera |
| US8077411B2 (en) * | 2008-01-24 | 2011-12-13 | E-Pin Optical Industry Co., Ltd. | Lens displacement mechanism using shaped memory alloy |
| WO2010089529A1 (en) * | 2009-02-09 | 2010-08-12 | Cambridge Mechatronics Limited | Optical image stabilisation |
| US8830335B2 (en) * | 2010-02-26 | 2014-09-09 | Cambridge Mechatronics Limited | SMA actuation apparatus |
| TWI416240B (zh) * | 2011-03-30 | 2013-11-21 | Largan Precision Co Ltd | 攝影模組 |
-
2013
- 2013-01-28 JP JP2013557465A patent/JPWO2013118601A1/ja active Pending
- 2013-01-28 WO PCT/JP2013/051741 patent/WO2013118601A1/ja active Application Filing
- 2013-01-28 US US14/377,183 patent/US20150322929A1/en not_active Abandoned
- 2013-01-28 EP EP13746425.1A patent/EP2813877A4/en not_active Withdrawn
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05104475A (ja) * | 1991-10-15 | 1993-04-27 | Matsushita Electric Ind Co Ltd | 多自由度アクチユエータ |
| JP2001227454A (ja) * | 2000-02-16 | 2001-08-24 | Rhythm Watch Co Ltd | 駆動装置およびからくり装置 |
| JP2005338298A (ja) * | 2004-05-25 | 2005-12-08 | Sumida Corporation | 振れ補正光学装置 |
| JP2007064063A (ja) * | 2005-08-30 | 2007-03-15 | Konica Minolta Opto Inc | 駆動装置及びこれを用いた撮像装置 |
| JP2007114585A (ja) | 2005-10-21 | 2007-05-10 | Fujifilm Corp | 像ぶれ補正装置及び撮像装置 |
| JP2007139965A (ja) * | 2005-11-16 | 2007-06-07 | Konica Minolta Opto Inc | 駆動装置 |
| JP2008079492A (ja) * | 2006-08-22 | 2008-04-03 | Seiko Instruments Inc | 圧電アクチュエータを用いた駆動装置及びこれを搭載した電子機器 |
| JP2011501245A (ja) | 2007-10-30 | 2011-01-06 | ケンブリッジ メカトロニクス リミテッド | 形状記憶合金駆動装置 |
| JP2009237535A (ja) * | 2008-03-25 | 2009-10-15 | Hon Hai Precision Industry Co Ltd | 撮像装置 |
Non-Patent Citations (2)
| Title |
|---|
| "Actuator Mechanism Using Suspension-wire for 2D Scanning", JOURNAL OF PRECISION ENGINEERING, vol. 74, no. 1, 2008, pages 102 - 106 |
| See also references of EP2813877A4 |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9753300B2 (en) | 2012-02-16 | 2017-09-05 | Cambridge Mechatronics Limited | Shape memory alloy actuation apparatus |
| US9175671B2 (en) | 2012-04-12 | 2015-11-03 | Cambridge Mechatronics Limited | SMA actuation apparatus |
| US9518566B2 (en) | 2012-05-25 | 2016-12-13 | Cambridge Mechatronics Limited | Shape memory alloy actuation apparatus |
| JP2015518977A (ja) * | 2012-05-25 | 2015-07-06 | ケンブリッジ メカトロニクス リミテッド | 形状記憶合金作動装置 |
| US9609219B2 (en) | 2012-11-27 | 2017-03-28 | Cambridge Mechatronics Limited | Suspension system for a camera lens element |
| JP2018522256A (ja) * | 2015-05-05 | 2018-08-09 | アクチュエーター・ソリュ—ションズ・ゲーエムベーハー | チルトモジュールサブアセンブリ、及び当該チルトモジュールサブアセンブリを具備する光学式手ブレ補正機構 |
| KR102272706B1 (ko) | 2015-05-05 | 2021-07-05 | 액추에이터 솔루션스 게엠베하 | 틸트 모듈 부조립체 및 그것을 포함하는 광학 영상 안정장치 |
| KR20180003532A (ko) * | 2015-05-05 | 2018-01-09 | 액추에이터 솔루션스 게엠베하 | 틸트 모듈 부조립체 및 그것을 포함하는 광학 영상 안정장치 |
| US10648459B2 (en) | 2015-05-26 | 2020-05-12 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
| US11286916B2 (en) * | 2015-05-26 | 2022-03-29 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
| WO2016189314A1 (en) * | 2015-05-26 | 2016-12-01 | Cambridge Mechatronics Limited | Assembly method for a shape memory alloy actuator arrangement |
| US10663753B2 (en) | 2015-09-29 | 2020-05-26 | Cambridge Mechatronics Limited | Shape memory alloy actuator arrangement |
| US11048098B2 (en) | 2015-09-29 | 2021-06-29 | Cambridge Mechatronics Limited | Shape memory alloy actuator arrangement |
| US11187916B2 (en) | 2015-10-28 | 2021-11-30 | Cambridge Mechatronics Limited | Camera assembly providing optical image stabilization |
| JP2017207734A (ja) * | 2016-04-01 | 2017-11-24 | 台湾東電化股▲ふん▼有限公司 | カメラモジュールおよびそれを制御する方法 |
| JP2020502591A (ja) * | 2016-12-13 | 2020-01-23 | アクチュエーター・ソリュ—ションズ・ゲーエムベーハー | 光学式手ブレ補正機構 |
| US11199182B2 (en) | 2016-12-16 | 2021-12-14 | Hutchinson Technology Incorporated | Sensor shift structures in optical image stabilization suspensions |
| JP2020515881A (ja) * | 2016-12-16 | 2020-05-28 | ハッチンソン テクノロジー インコーポレイテッドHutchinson Technology Incorporated | 光学画像安定化サスペンションにおけるセンサシフト構造 |
| CN110199119A (zh) * | 2016-12-16 | 2019-09-03 | 哈钦森技术股份有限公司 | 光学图像稳定悬架中的传感器移位结构 |
| GB2609866B (en) * | 2017-04-20 | 2023-05-31 | Cambridge Mechatronics Ltd | Shape memory alloy actuator |
| GB2609866A (en) * | 2017-04-20 | 2023-02-15 | Cambridge Mechatronics Ltd | Continuous wiring of shape memory alloy actuators |
| KR20190037937A (ko) * | 2017-09-29 | 2019-04-08 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 |
| KR102473235B1 (ko) * | 2017-09-29 | 2022-12-02 | 엘지이노텍 주식회사 | 렌즈 구동 장치, 카메라 모듈 및 광학 기기 |
| CN109725473B (zh) * | 2017-10-30 | 2021-09-28 | 台湾东电化股份有限公司 | 光学驱动机构 |
| CN109725473A (zh) * | 2017-10-30 | 2019-05-07 | 台湾东电化股份有限公司 | 光学驱动机构 |
| CN109901275A (zh) * | 2017-12-08 | 2019-06-18 | 宁波舜宇光电信息有限公司 | 在光学组件上缠绕sma线的方法 |
| CN109901275B (zh) * | 2017-12-08 | 2021-05-18 | 宁波舜宇光电信息有限公司 | 在光学组件上缠绕sma线的方法 |
| US11454863B2 (en) | 2018-07-09 | 2022-09-27 | Samsung Electro-Mechanics Co., Ltd. | Camera module |
| WO2021047595A1 (zh) * | 2019-09-11 | 2021-03-18 | 常州市瑞泰光电有限公司 | 镜头模组 |
| US11194115B1 (en) | 2020-09-02 | 2021-12-07 | Hutchinson Technology Incorporated | Guided autofocus assembly |
Also Published As
| Publication number | Publication date |
|---|---|
| US20150322929A1 (en) | 2015-11-12 |
| EP2813877A4 (en) | 2015-09-02 |
| EP2813877A1 (en) | 2014-12-17 |
| JPWO2013118601A1 (ja) | 2015-05-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2013118601A1 (ja) | 駆動装置およびレンズユニット | |
| EP3304161B1 (en) | Bi-directional stiffness for optical image stabilization in a digital camera | |
| KR101992040B1 (ko) | 접이식 렌즈 카메라용 저-프로파일 3-축 액추에이터 | |
| JP6391584B2 (ja) | カメラレンズ要素用のサスペンションシステム | |
| JP5825534B2 (ja) | カメラモジュール | |
| JP2009210897A (ja) | 板バネ、レンズ駆動装置および板バネの製造方法 | |
| JP5175492B2 (ja) | 撮像装置 | |
| JP2021099417A (ja) | カメラモジュール | |
| KR20170062441A (ko) | 카메라 어셈블리 | |
| JP2008089803A (ja) | 撮像装置 | |
| JP2008203402A (ja) | センサ装置、および撮像装置 | |
| JP6910746B2 (ja) | 光学防振アセンブリ | |
| JP2008020813A (ja) | レンズ駆動機構およびそれを用いる撮像装置 | |
| US20110242340A1 (en) | Image pickup element unit, autofocus unit, and image pickup apparatus | |
| JP2016046407A (ja) | 圧電アクチュエータ、リニア駆動装置及び電子機器 | |
| JP2008089804A (ja) | 撮像装置 | |
| JP2021507308A (ja) | レンズ位置調整装置、カメラモジュール、情報装置、およびカメラ駆動方法 | |
| US20230236474A1 (en) | Actuator assembly | |
| CN109416498B (zh) | 双照相机设备 | |
| US20240026866A1 (en) | Actuator assembly | |
| GB2594921A (en) | Actuator assembly | |
| WO2015001954A1 (ja) | レンズ駆動装置 | |
| JP5321132B2 (ja) | 駆動装置及びレンズ駆動装置 | |
| KR101159171B1 (ko) | 렌즈 액추에이터 | |
| WO2015025734A1 (ja) | レンズユニット、撮像装置及びマルチアレイレンズ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 13746425 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2013557465 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14377183 Country of ref document: US |
|
| REEP | Request for entry into the european phase |
Ref document number: 2013746425 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2013746425 Country of ref document: EP |