WO2012165146A1 - 車両用モータ駆動装置の変速制御方法および自動車の変速制御方法 - Google Patents
車両用モータ駆動装置の変速制御方法および自動車の変速制御方法 Download PDFInfo
- Publication number
- WO2012165146A1 WO2012165146A1 PCT/JP2012/062490 JP2012062490W WO2012165146A1 WO 2012165146 A1 WO2012165146 A1 WO 2012165146A1 JP 2012062490 W JP2012062490 W JP 2012062490W WO 2012165146 A1 WO2012165146 A1 WO 2012165146A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- shift
- speed
- gear
- output
- clutch
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 32
- 230000005540 biological transmission Effects 0.000 claims description 32
- 230000007935 neutral effect Effects 0.000 claims description 20
- 238000000926 separation method Methods 0.000 claims description 9
- 230000035939 shock Effects 0.000 abstract description 7
- 230000001360 synchronised effect Effects 0.000 abstract 1
- 230000033001 locomotion Effects 0.000 description 12
- 238000010586 diagram Methods 0.000 description 8
- 125000006850 spacer group Chemical group 0.000 description 4
- 230000009194 climbing Effects 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000036316 preload Effects 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000008929 regeneration Effects 0.000 description 1
- 238000011069 regeneration method Methods 0.000 description 1
- 230000004043 responsiveness Effects 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
- B60W10/08—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units including control of electric propulsion units, e.g. motors or generators
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L15/00—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles
- B60L15/20—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed
- B60L15/2054—Methods, circuits, or devices for controlling the traction-motor speed of electrically-propelled vehicles for control of the vehicle or its driving motor to achieve a desired performance, e.g. speed, torque, programmed variation of speed by controlling transmissions or clutches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
- B60W10/11—Stepped gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/19—Improvement of gear change, e.g. by synchronisation or smoothing gear shift
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16D—COUPLINGS FOR TRANSMITTING ROTATION; CLUTCHES; BRAKES
- F16D41/00—Freewheels or freewheel clutches
- F16D41/06—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface
- F16D41/08—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface with provision for altering the freewheeling action
- F16D41/10—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface with provision for altering the freewheeling action with self-actuated reversing
- F16D41/105—Freewheels or freewheel clutches with intermediate wedging coupling members between an inner and an outer surface with provision for altering the freewheeling action with self-actuated reversing the intermediate members being of circular cross-section, of only one size and wedging by rolling movement not having an axial component between inner and outer races, one of which is cylindrical
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0403—Synchronisation before shifting
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L2240/00—Control parameters of input or output; Target parameters
- B60L2240/40—Drive Train control parameters
- B60L2240/48—Drive Train control parameters related to transmissions
- B60L2240/486—Operating parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/08—Electric propulsion units
- B60W2710/086—Power
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2200/00—Type of vehicle
- B60Y2200/90—Vehicles comprising electric prime movers
- B60Y2200/91—Electric vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2300/00—Purposes or special features of road vehicle drive control systems
- B60Y2300/70—Control of gearings
- B60Y2300/72—Facilitate disengaging of gears, e.g. by inducing a torque reversal
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2400/00—Special features of vehicle units
- B60Y2400/42—Clutches or brakes
- B60Y2400/427—One-way clutches
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/04—Smoothing ratio shift
- F16H61/0403—Synchronisation before shifting
- F16H2061/0422—Synchronisation before shifting by an electric machine, e.g. by accelerating or braking the input shaft
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/0021—Transmissions for multiple ratios specially adapted for electric vehicles
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H2200/00—Transmissions for multiple ratios
- F16H2200/003—Transmissions for multiple ratios characterised by the number of forward speeds
- F16H2200/0034—Transmissions for multiple ratios characterised by the number of forward speeds the gear ratios comprising two forward speeds
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/72—Electric energy management in electromobility
Definitions
- the present invention relates to a shift control method for a vehicle motor drive device that shifts the rotation of an electric motor and transmits the rotation to wheels.
- An electric motor, a transmission that changes the rotation of the electric motor, and a differential that distributes the rotation output from the transmission to left and right wheels as a vehicle motor driving device used in a drive device of an electric vehicle and a hybrid vehicle What consists of a gear is conventionally known.
- this vehicle motor drive device When this vehicle motor drive device is used, it is possible to use the electric motor in a highly efficient rotational speed and torque region during driving and regeneration by switching the transmission gear ratio according to the running conditions. .
- the rotational speed of the rotating member of the transmission during high-speed traveling can be reduced, and the power loss of the transmission can be reduced to improve the energy efficiency of the vehicle.
- a vehicle motor drive device described in Patent Document 1 includes an electric motor, an input shaft to which rotation of the electric motor is input, an output shaft disposed in parallel to the input shaft at an interval, and an input shaft 1-speed input gear and 2-speed input gear provided on the 1st-speed input gear and 2-speed input gear provided on the output shaft and meshing with the 1-speed input gear and 2-speed input gear, respectively, and rotation of the output shaft A differential gear that distributes the left and right wheels,
- the 1st speed output gear and the 2nd speed output gear are rotatably supported by the output shaft through bearings,
- a 1-speed 2-way roller clutch that switches between transmission and disconnection of torque between the first-speed output gear and the output shaft, and 2 that switches between transmission and disconnection of torque between the 2-speed output gear and the output shaft
- a speed 2-way roller clutch, a 1-speed 2-way roller clutch, and a 2-speed 2-way roller clutch are selectively provided.
- the first-speed two-way roller clutch is assembled between a cylindrical surface provided on the inner periphery of the first-speed output gear, a cam surface provided on the outer periphery of the output shaft, and the cam surface and the cylindrical surface. Between the engagement position for holding the roller and engaging the roller between the cam surface and the cylindrical surface and the neutral position for releasing the engagement of the roller.
- the first-speed retainer and a first-speed switch spring that elastically holds the first-speed retainer in the neutral position.
- the first-speed retainer is disposed between the engagement position and the neutral position in the circumferential direction. By moving, torque transmission and interruption can be switched.
- the 2-speed 2-way roller clutch has the same configuration as the 1-speed 2-way roller clutch.
- the speed change actuator is provided with a first speed friction plate that is prevented from rotating with respect to the first speed retainer and is movable in the axial direction between a position that contacts the side surface of the first speed output gear and a position that moves away from the position.
- a first-speed separation spring that urges the first-speed friction plate in a direction away from the side surface of the first-speed output gear, and a position that is prevented from rotating with respect to the second-speed retainer and that contacts the side surface of the second-speed output gear.
- a two-speed friction plate provided so as to be movable in the axial direction between the position, a two-speed separation spring that urges the two-speed friction plate in a direction away from the side surface of the second-speed output gear, and a first-speed friction plate Is provided so as to be movable in the axial direction between a first speed shift position where the first speed shift gear is pressed and brought into contact with the side face of the first speed output gear and a second speed shift position where the second speed friction plate is pressed and brought into contact with the side face of the second speed output gear Shift ring and shift that moves the shift ring in the axial direction Consisting of a structure.
- the speed change control method described in Patent Document 1 has the following problems because the synchronization operation is performed by torque control for controlling the output torque of the electric motor to a preset target torque. That is, since the vehicle speed when changing the gear stage is different every time, the target rotation speed of the synchro operation is also different every time. Therefore, if the target torque for torque control is made constant regardless of the target rotational speed, there is a problem that the time required for the synchronization operation becomes long when the difference between the current rotational speed and the target rotational speed is large. In addition, it is complicated to set the target torque for torque control for each vehicle speed.
- Patent Document 2 as a quick and smooth shift control method, the target torque is calculated based on the vehicle speed at the start of shift, and the output torque of the electric motor is output until a predetermined time that is expected to be required for shift has elapsed.
- a method of performing a synchro operation by controlling the torque to a target torque is disclosed. However, in this method, since the target torque is determined based only on the vehicle speed at the start of the shift, when the vehicle speed changes during the shift (for example, when climbing or descending), the next shift speed is not sufficient. May cause a large shift shock.
- the problem to be solved by the present invention is to reduce the time required for shifting the vehicle motor drive device using the 2-way roller clutch and to reduce the shift shock.
- an electric motor an input shaft to which rotation of the electric motor is input, and an output shaft arranged in parallel to the input shaft at intervals, A first input gear and a second input gear provided on the input shaft; a first output gear and a second output gear provided on the output shaft and meshing with the first input gear and the second input gear, respectively; A differential gear that distributes rotation of the output shaft to left and right wheels; One of the set of the first input gear, the second input gear, and the input shaft, the set of the first output gear, the second output gear, and the output shaft, and the first clutch gear, the second clutch gear, and the like.
- a clutch gear support shaft that rotatably supports the clutch gear via a bearing, Transmission of torque between the first clutch gear and the clutch gear support shaft; and transmission of torque between the second clutch gear and the clutch gear support shaft.
- a second two-way roller clutch that performs switching of shut-off, and a transmission actuator that selectively engages the first two-way roller clutch and the second two-way roller clutch,
- the first two-way roller clutch includes a cylindrical surface provided on one of the inner periphery of the first clutch gear and the outer periphery of the clutch gear support shaft, a cam surface provided on the other, the cam surface, and the cylinder.
- a roller incorporated between the surfaces, and the clutch gear between an engagement position for holding the roller and engaging the roller between the cam surface and the cylindrical surface and a neutral position for releasing the engagement of the roller.
- a first retainer provided to be rotatable relative to the support shaft, and a first switch spring that elastically retains the first retainer in the neutral position;
- the second two-way roller clutch includes a cylindrical surface provided on one of the inner periphery of the second clutch gear and the outer periphery of the clutch gear support shaft, a cam surface provided on the other, the cam surface, and the cylinder.
- a roller incorporated between the surfaces, and the clutch gear between an engagement position for holding the roller and engaging the roller between the cam surface and the cylindrical surface and a neutral position for releasing the engagement of the roller.
- a second retainer provided so as to be rotatable relative to the support shaft, and a second switch spring for elastically retaining the second retainer in the neutral position
- a first friction plate provided to be movable in the axial direction between a position where the speed change actuator is prevented from rotating with respect to the first cage and is in contact with a side surface of the first clutch gear;
- a first separation spring that urges the first friction plate in a direction away from the side surface of the first clutch gear, and is prevented from rotating with respect to the second retainer and contacts the side surface of the second clutch gear.
- a second friction plate provided so as to be movable in the axial direction between a position and a separating position; and a second separating spring for biasing the second friction plate in a direction separating from the side surface of the second clutch gear.
- a first shift position that presses the first friction plate to contact the side surface of the first clutch gear and a second shift position that presses the second friction plate to contact the side surface of the second clutch gear.
- a gear shift command for releasing the engagement of the two-way roller clutch at the current gear stage and engaging the two-way roller clutch at the next gear stage is issued.
- the shift mechanism is operated to shift the shift position from the shift position of the current shift stage to the shift position of the next shift stage among the first shift position and the second shift position.
- a second step of moving the ring A third step of controlling the output of the electric motor so as to release the engagement of the two-way roller clutch at the current gear stage after the shift ring is moved in the second step; After the engagement of the two-way roller clutch at the current gear stage is released in the third step, the magnitude of the output torque of the electric motor is changed according to the deviation between the current rotational speed of the electric motor and the target rotational speed.
- the output control of the electric motor is performed in advance from the rotational speed control to the output torque of the electric motor.
- a shift control method having a fifth step of switching to torque control for controlling to the set target torque and gradually increasing the output torque of the electric motor by the torque control is adopted.
- the third step is configured to release the engagement of the two-way roller clutch at the current shift stage by decelerating the rotation speed of the electric motor by the rotation speed control when the shift instruction is a shift-up instruction. be able to.
- a negative torque having a large absolute value is used as an output torque for releasing the engagement of the two-way roller clutch at the current gear stage. Since this occurs in the electric motor, it is possible to effectively suppress the time required for the subsequent synchronization operation to be completed.
- the torque control causes the output torque of the electric motor to be zero or negative torque so as to release the engagement of the two-way roller clutch at the current gear stage.
- the fourth step may be configured to update the target rotational speed in accordance with the current vehicle speed for each preset calculation cycle while performing the rotational speed control.
- the target rotational speed is updated according to the current vehicle speed. The shift shock can be reliably suppressed without the clutch being engaged.
- the fourth step may be configured to control the rotation speed of the electric motor so that the deviation of the rotation speed of the current electric motor from the target rotation speed converges to zero, and further the current rotation of the electric motor. Even after the deviation from the target value of the number converges to zero, the deviation of the current rotational speed of the electric motor from the target rotational speed is maintained at zero until the shift ring reaches the shift position of the next shift stage.
- it can comprise so that the rotation speed of an electric motor may be controlled.
- PI control in which an integral operation is added to a proportional operation can be employed.
- the third step may be configured to control the output of the electric motor so as to release the engagement of the two-way roller clutch at the current gear stage immediately after the shift ring movement in the second step is started. Is possible. However, until the shift ring reaches the motor control start position set in advance between the first shift position and the second shift position after the movement of the shift ring in the second step is started. During this period, the output of the electric motor is controlled so as to output a torque corresponding to the amount of operation of the accelerator pedal, and when the shift ring reaches the motor control start position, the engagement of the two-way roller clutch at the current gear stage. It is preferable that the output of the electric motor be controlled so as to cancel the connection.
- the torque transmitted between the input shaft and the output shaft is maintained until the shift ring reaches the motor control start position after the shift ring movement in the second step is started. Since there is no disconnection, the torque is compared with the case where the output of the electric motor is controlled so as to release the engagement of the two-way roller clutch of the current shift stage immediately after the shift ring movement in the second step is started. The time for omission is short.
- the vehicle motor drive device can be controlled by the above-described shift control method.
- the vehicle motor drive device is driven by the above-described shift control method. Can be controlled.
- the magnitude of the output torque of the electric motor changes according to the deviation between the current rotation speed of the electric motor and the target rotation speed.
- the time required for the synchro operation is short. Further, after the synchro operation is completed, the output torque of the electric motor is gradually increased by torque control, so that a shift shock is unlikely to occur.
- FIG. 3 Schematic of an electric vehicle equipped with a vehicle motor drive device
- FIG. 3 Schematic diagram of a hybrid vehicle equipped with a vehicle motor drive device
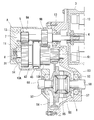
- FIG. 3 is an enlarged sectional view of the vicinity of the first-speed output gear and the second-speed output gear.
- FIG. 4 is an enlarged sectional view in the vicinity of the shift ring.
- Sectional view along line VI-VI in FIG. Sectional view along line VII-VII in FIG.
- Sectional view showing shift mechanism 4 is an exploded perspective view of the vicinity of the second-speed cam member in FIG.
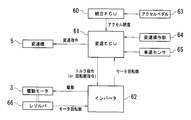
- the block diagram which shows the control system of the motor drive unit for vehicles shown in FIG.
- a diagram showing an automatic shift diagram (in the figure, the solid line is the upshift line and the broken line is the downshift line)
- Flow chart showing shift judgment control in automatic shift mode The flowchart which shows the speed-change control method of this embodiment of this invention
- the figure which shows an example of the correspondence of the shift position of the shift ring at the time of upshifting, and the rotation speed of an input shaft and an output shaft
- Block diagram showing rotation speed control of electric motor The figure which shows an example of the correspondence of the shift position of the shift ring at the time of downshifting, and the rotation speed of an input shaft and an output shaft
- FIG. 1 shows an electric vehicle EV in which a pair of left and right front wheels 1 are drive wheels driven by a vehicle motor drive device A, and a pair of left and right rear wheels 2 are driven wheels.
- FIG. 2 shows a hybrid vehicle HV in which a pair of left and right front wheels 1 are main drive wheels driven by an engine E, and a pair of left and right rear wheels 2 are auxiliary drive wheels driven by a vehicle motor drive device A according to the present invention. Indicates.
- the hybrid vehicle HV is provided with a transmission T that shifts the rotation of the engine E and a differential gear D that distributes the rotation output from the transmission T to the left and right front wheels 1.
- the vehicle motor drive device A includes an electric motor 3, a transmission 5 that shifts and outputs the rotation of the motor shaft 4 of the electric motor 3, and the rotation output from the transmission 5.
- a differential gear 6 is distributed to the pair of left and right front wheels 1 of the electric vehicle EV shown in FIG. 1 or distributed to the pair of left and right rear wheels 2 of the hybrid vehicle HV shown in FIG.
- the transmission 5 includes an input shaft 7 to which the rotation of the motor shaft 4 is input, an output shaft 8 disposed in parallel to the input shaft 7 at an interval, and an input shaft 7.
- the first-speed input gear 9A and the second-speed input gear 9B provided, and the first-speed output gear 10A and the second-speed output gear 10B provided on the output shaft 8 are provided.
- the motor shaft 4 is coaxially arranged in series with the input shaft 7 and is rotationally driven by the stator 12 of the electric motor 3 fixed to the housing 11.
- the input shaft 7 is rotatably supported by a pair of opposed bearings 13 incorporated in the housing 11, and the shaft end of the input shaft 7 is connected to the motor shaft 4 by spline fitting.
- the output shaft 8 is rotatably supported by a pair of opposed bearings 14 incorporated in the housing 11.
- the first-speed input gear 9A and the second-speed input gear 9B are arranged at an interval in the axial direction, and are fixed to the input shaft 7 so as to rotate integrally with the input shaft 7 around the input shaft 7.
- the first-speed output gear 10A and the second-speed output gear 10B are also arranged at intervals in the axial direction.
- the first-speed output gear 10 ⁇ / b> A is formed in an annular shape that penetrates the output shaft 8, and is supported by the output shaft 8 via a bearing 15, and the output shaft 8 is centered on the output shaft 8. And can be rotated.
- the second speed output gear 10 ⁇ / b> B is also rotatably supported by the output shaft 8 via the bearing 15.
- the first speed input gear 9A and the first speed output gear 10A mesh with each other, and rotation is transmitted between the first speed input gear 9A and the first speed output gear 10A.
- the 2nd speed input gear 9B and the 2nd speed output gear 10B are also meshed, and rotation is transmitted between the 2nd speed input gear 9B and the 2nd speed output gear 10B by the meshing.
- the reduction ratio between the second speed input gear 9B and the second speed output gear 10B is smaller than the reduction ratio between the first speed input gear 9A and the first speed output gear 10A.
- first-speed output gear 10A and the output shaft 8 are incorporated between the first-speed output gear 10A and the output shaft 8 .
- a 2-speed 2-way roller clutch 16B is incorporated between the 2-speed output gear 10B and the output shaft 8 to switch torque transmission and interruption between the 2-speed output gear 10B and the output shaft 8. .
- the second-speed two-way roller clutch 16B Since the first-speed two-way roller clutch 16A and the second-speed two-way roller clutch 16B have the same symmetrical configuration, the second-speed two-way roller clutch 16B will be described below.
- the parts corresponding to the 2-speed 2-way roller clutch 16B are denoted by the same reference numerals or the reference numerals in which the alphabet B at the end is replaced with A, and the description thereof is omitted.
- the two-speed two-way roller clutch 16B includes a cylindrical surface 17 provided on the inner periphery of the second-speed output gear 10B and an annular second gear that is prevented from rotating on the outer periphery of the output shaft 8. It comprises a cam surface 19 formed on the cam member 18B, a roller 20 incorporated between the cam surface 19 and the cylindrical surface 17, a second speed holder 21B for holding the roller 20, and a second speed switch spring 22B.
- the cam surface 19 is a surface that forms a wedge-shaped space that gradually narrows from the circumferential center to both ends in the circumferential direction with the cylindrical surface 17. For example, as shown in FIG. 6, the cam surface 19 faces the cylindrical surface 17. It is a flat surface.
- the 2-speed retainer 21 ⁇ / b> B includes a cylindrical portion 24 in which a plurality of pockets 23 for accommodating the rollers 20 are formed at intervals in the circumferential direction, and a radial direction from one end of the cylindrical portion 24. And an inward flange portion 25 extending inward.
- the radially inner end of the inward flange portion 25 is supported so as to be slidable in the circumferential direction on the outer periphery of the second-speed cam member 18B, and the second-speed cage 21B causes the cam surface 19 and the cylindrical surface 17 to slide.
- rotation relative to the output shaft 8 is possible.
- the inward flange portion 25 of the second-speed cage 21B is restricted from moving in the axial direction, thereby making the second-speed cage 21B immovable in the axial direction.
- each cam surface 19 is formed symmetrically with respect to a virtual plane including the center of rotation, so that the rollers 20 arranged between each cam surface 19 and the cylindrical surface 17 can rotate forward.
- the engagement is possible in both the direction and the reverse direction. That is, when the vehicle is advanced by the torque generated by the electric motor 3, the roller 20 held by the second-speed cage 21B is rotated by rotating the second-speed cage 21B in the normal rotation direction with respect to the output shaft 8. Is engaged with a narrow space on the forward rotation direction side between the cam surface 19 and the cylindrical surface 17, and torque in the forward rotation direction is transmitted between the second-speed output gear 10 ⁇ / b> B and the output shaft 8 via the roller 20.
- the second-speed cage is rotated by rotating the second-speed cage 21B relative to the output shaft 8 in the reverse direction.
- the roller 20 held by 21B is engaged in a narrow space on the reverse rotation direction side between the cam surface 19 and the cylindrical surface 17, and the reverse rotation direction is established between the second speed output gear 10B and the output shaft 8 via the roller 20.
- the two-speed switch spring 22 ⁇ / b> B includes a C-shaped annular portion 26 in which a steel wire is wound in a C shape, and a pair extending radially outward from both ends of the C-shaped annular portion 26. Extending portions 27, 27.
- the C-shaped annular portion 26 is fitted into a circular switch spring accommodating recess 28 formed on the axial end surface of the second-speed cam member 18B, and the pair of extending portions 27 and 27 are axial end surfaces of the second-speed cam member 18B. It is inserted in the radial groove 29 formed in.
- the radial groove 29 is formed so as to extend radially outward from the inner peripheral edge of the switch spring accommodating recess 28 and reach the outer periphery of the second speed cam member 18B.
- the extension portion 27 of the second speed switch spring 22B protrudes from the radially outer end of the radial groove 29, and the protruding portion of the extension portion 27 from the radial groove 29 is the cylindrical portion of the second speed cage 21B.
- 24 is inserted into a notch 30 formed at the end in the axial direction.
- the radial groove 29 and the notch 30 are formed to have the same width.
- the extending portions 27, 27 are in contact with the inner surface facing the circumferential direction of the radial groove 29 and the inner surface facing the circumferential direction of the notch 30, respectively, and 2 by the circumferential force acting on the contact surface.
- the speed holder 21B is elastically held in the neutral position.
- the first-speed cam member 18A and the second-speed cam member 18B are prevented from rotating with respect to the output shaft 8 by spline fitting.
- the cam surface 19 of the first speed cam member 18A and the cam surface 19 of the second speed cam member 18B have the same number and the same phase.
- the first speed cam member 18 ⁇ / b> A and the second speed cam member 18 ⁇ / b> B are non-movable in the axial direction by a pair of retaining rings 31 fitted to the outer periphery of the output shaft 8.
- a spacer 32 is incorporated between the first speed cam member 18A and the second speed cam member 18B.
- the first-speed two-way roller clutch 16A and the second-speed two-way roller clutch 16B can be selectively engaged by the transmission actuator 33.
- the shift actuator 33 includes a shift ring 34 that is movably provided in the axial direction between the first-speed output gear 10 ⁇ / b> A and the second-speed output gear 10 ⁇ / b> B, and the first-speed output gear 10 ⁇ / b> A and the shift ring 34.
- first-speed friction plate 35A and the second-speed friction plate 35B have the same configuration with left-right symmetry, the second-speed friction plate 35B will be described below, and the first-speed friction plate 35A corresponds to the second-speed friction plate 35B.
- Parts are denoted by the same reference numerals or reference numerals in which the alphabet B at the end is replaced with A, and description thereof is omitted.
- the second-speed friction plate 35B is provided with a projecting piece 36 that engages with the notch 30 of the second-speed retainer 21B.
- the engagement between the projecting piece 36 and the notch 30 causes the second-speed friction plate 35B to hold the second speed.
- the rotation is stopped by the vessel 21B.
- the notch 30 of the second-speed retainer 21B accommodates the projecting piece 36 of the second-speed friction plate 35B so as to be slidable in the axial direction. By this sliding, the second-speed friction plate 35B rotates around the second-speed retainer 21B. It can move in the axial direction with respect to the second-speed retainer 21B between a position in contact with the side surface of the second-speed output gear 10B and a position away from the second-speed output gear 10B.
- a recess 37 is formed at the tip of the projecting piece 36 of the second speed friction plate 35B, and a protrusion 38 that engages with the recess 37 is formed on the outer periphery of the spacer 32.
- the concave portion 37 and the convex portion 38 are engaged with the concave portion 37 and the convex portion 38 in a state where the second speed friction plate 35B is located away from the side surface of the second speed output gear 10B. Is prevented from rotating around the output shaft 8 via the spacer 32. At this time, the second-speed retainer 21B, which is prevented from rotating by the second-speed friction plate 35B, is held in the neutral position.
- a second speed separation spring 39B is incorporated in an axially compressed state, and the second speed friction plate is generated by the elastic restoring force of the second speed separation spring 39B. 35B is urged in a direction away from the side surface of the second-speed output gear 10B.
- the second speed separating spring 39B is a coil spring wound along the outer periphery of the spacer 32, and one end thereof is supported by the end face in the axial direction of the second speed cam member 18B via the second speed washer 40B.
- the second speed washer 40B is formed in an annular shape so as to cover the radial groove 29 on the axial end surface of the second speed cam member 18B.
- the shift ring 34 presses the first-speed friction plate 35A to contact the side surface of the first-speed output gear 10A and the first-speed shift position SP1f to press the second-speed friction plate 35B to contact the side surface of the second-speed output gear 10B.
- the second-speed shift position SP2f is supported so as to be movable in the axial direction. Further, a shift mechanism 41 that moves the shift ring 34 in the axial direction between the first-speed shift position SP1f and the second-speed shift position SP2f is provided.
- the shift mechanism 41 is related to a shift sleeve 43 that rotatably supports the shift ring 34 via a rolling bearing 42 and an annular groove 44 provided on the outer periphery of the shift sleeve 43.
- the shift rod 46 is arranged parallel to the output shaft 8 at a distance, and is supported by a pair of sliding bearings 49 incorporated in the housing 11 so as to be slidable in the axial direction.
- the rolling bearing 42 incorporated between the shift ring 34 and the shift sleeve 43 is assembled so as to be immovable in the axial direction with respect to both the shift ring 34 and the shift sleeve 43.
- the rotation of the shift motor 47 is converted into a linear motion by the motion conversion mechanism 48 and transmitted to the shift fork 45, and the linear motion of the shift fork 45 is transmitted to the shift ring 34 via the rolling bearing 42.
- the shift ring 34 is moved in the axial direction.
- a preload spring 50 that is compressible in the axial direction is incorporated in the axial clearance on both sides between the shift fork 45 and the annular groove 44.
- the preload spring 50 is adjusted by adjusting the relative position in the axial direction of the shift fork 45 with respect to the shift sleeve 43.
- a differential drive gear 51 that transmits the rotation of the output shaft 8 to the differential gear 6 is fixed to the output shaft 8.
- the differential gear 6 includes a differential case 53 that is rotatably supported by a pair of bearings 52, a ring gear 54 that is fixed to the differential case 53 coaxially with the rotational center of the differential case 53, meshed with the differential drive gear 51, and the rotational center of the differential case 53.
- the pinion shaft 55 is fixed to the differential case 53 in a direction perpendicular to the pinion shaft 55, the pair of pinions 56 are rotatably supported by the pinion shaft 55, and the pair of left and right side gears 57 meshed with the pair of pinions 56.
- the left side gear 57 is connected to the shaft end portion of the axle 58 connected to the left wheel, and the right side gear 57 is connected to the shaft end portion of the axle 58 connected to the right wheel.
- the output shaft 8 rotates, the rotation of the output shaft 8 is transmitted to the differential case 53 via the differential drive gear 51, and the rotation of the differential case 53 is distributed to the left and right wheels via the pinion 56 and the side gear 57.
- the vehicle motor drive device A is controlled by the control system shown in FIG.
- This control system includes an integrated ECU 60, a transmission ECU 61, and an inverter 62.
- the integrated ECU 60 is an electronic control device that issues instructions in cooperation with a vehicle brake device and a steering device (not shown).
- the integrated ECU 60 is connected to the accelerator pedal 63 and outputs a signal corresponding to the accelerator opening calculated based on the signal from the accelerator pedal 63 to the transmission ECU 61.
- the shift ECU 61 is an electronic control device that makes a shift determination based on various input signals and issues a command to the transmission 5 and the inverter 62.
- the shift ECU 61 receives a shift operation from a shift operation unit 64 (for example, a tact switch that switches between the automatic shift mode and the manual shift mode or a shift lever that switches the shift stage manually in the manual shift mode) operated by the driver.
- a signal indicating the state is input.
- a signal indicating the current vehicle speed is input from the vehicle speed sensor 65 to the speed change ECU 61.
- the shift ECU 61 is programmed with three shift modes: an automatic shift mode, a manual shift mode, and a step mode.
- the automatic shift mode and the manual shift mode are switched by the operation of the shift operation unit 64 by the driver.
- the automatic transmission mode is a mode in which the automatic transmission is automatically changed as shown in FIG. 13 based on the accelerator opening, the vehicle speed, and the automatic transmission diagram (see FIG. 12).
- this automatic speed change mode for example, when the vehicle speed is accelerating, the upshift operation is performed when the upshift line is crossed from the left to the right. Further, when the vehicle speed is constant, the upshifting operation is performed when the upshift line is straddled from top to bottom. Further, when the vehicle speed is decelerating, the shift down operation is performed when the shift down line is crossed from the right to the left. Further, when the vehicle speed is constant, the downshift operation is performed when straddling the downshift line from the bottom to the top.
- the manual shift mode is a mode in which a shift is performed by a manual operation even in a region where no shift is performed on the automatic shift diagram.
- the step mode is a mode for selecting a gear position when the vehicle is stopped.
- the inverter 62 shown in FIG. 11 supplies power to the electric motor 3 and controls the supplied power based on a signal from the speed change ECU 61.
- a signal indicating the rotation speed of the electric motor 3 is input to the inverter 62 from a resolver 66 attached to the electric motor 3.
- the first speed holding is performed. 21A is held in the neutral position by the elastic force of the first speed switch spring 22A, and the second speed holder 21B is also held in the neutral position by the elastic force of the second speed switch spring 22B.
- the engagement of the roller 20 is released, and the 2-speed 2-way roller clutch 16B is also released from the engagement of the roller 20.
- the first-speed friction plate 35A comes into contact with the side surface of the first-speed output gear 10A.
- the first-speed friction plate 35A rotates relative to the output shaft 8 by the frictional force between the surfaces, and the first-speed retainer 21A that is prevented from rotating by the first-speed friction plate 35A resists the elastic force of the first-speed switch spring 22A.
- the roller 20 held by the first-speed holder 21A is pushed into the narrow portion of the wedge-shaped space between the cylindrical surface 17 and the cam surface 19 and engaged. Become.
- the first-speed two-way roller clutch 16A When the first-speed two-way roller clutch 16A is disengaged, if torque is transmitted via the first-speed two-way roller clutch 16A, the torque causes the roller 20 to move between the cylindrical surface 17 and the cam surface 19. It acts to push into the narrow part of the wedge-shaped space between them, and the disengagement of the first-speed two-way roller clutch 16A is prevented. Therefore, when the shift ring 34 starts to move in the axial direction from the first speed shift position SP1f to the second speed shift position SP2f by the operation of the shift mechanism 41, the first speed friction plate 35A is moved to the side surface of the first speed output gear 10A. There is a possibility that the engagement of the first-speed two-way roller clutch 16A is not released even though it has already separated from the initial position.
- the electric motor 3 and the shift motor 47 are controlled, and the engagement of the first-speed two-way roller clutch 16A or the second-speed two-way roller clutch 16B is released by this control. Ensuring operational reliability when doing.
- the shift ECU 61 releases the engagement of the first-speed 2-way roller clutch 16A and issues a shift-up shift command for engaging the second-speed 2-way roller clutch 16B (first step S 1 ). Whether or not to issue this shift command is determined based on the accelerator opening, the vehicle speed, and the automatic shift diagram (see FIG. 12) in the automatic shift mode, and in the manual shift mode, the shift by the driver is determined. This is determined based on the operation of the operation unit 64.
- the output of the electric motor 3 is controlled so as to release the engagement of the first-speed 2-way roller clutch 16A (third step S 3 ).
- the electric motor 3 is controlled by the rotational speed control that changes the magnitude of the output torque of the electric motor 3 according to the deviation between the current rotational speed of the electric motor 3 and the target rotational speed.
- the first-speed two-way roller clutch 16A is disengaged by decelerating the rotational speed of the first speed.
- the first-speed torque control starting position SP1t is such that the first-speed friction plate 35A is in contact with the side surface of the first-speed output gear 10A, but the friction force between the contact surfaces is less than the elastic force of the first-speed switch spring 22A.
- the position can be made smaller.
- the target rotational speed is the second speed obtained by multiplying the rotational speed of the input shaft 7 corresponding to the speed ratio of the next gear stage, that is, the current rotational speed Ngo of the output shaft 8 by the second speed reduction ratio r2.
- the rotation speed of the input shaft 7 is Ngo ⁇ r2 (see FIG. 15).
- the target rotation speed Ngo ⁇ r2 is updated according to the current vehicle speed every preset calculation cycle (for example, every 1 msec). Therefore, even when the vehicle speed changes during shifting (for example, when climbing, descending, or braking), the synchronization operation can be performed following the change in the vehicle speed.
- the rotational speed control shown in FIG. 16 is PI control in which an integral operation is added to the proportional operation, and the actual rotational speed of the electric motor 3 detected by the resolver 66 is fed back, and the actual rotational speed of the electric motor 3 is fed back. And the deviation of the target rotational speed is converted into a torque command, and the torque command is converted into a current value of the electric motor 3 and applied to the electric motor 3.
- the proportional gain and the integral gain can be set on the inverter 62 side, and the time required for the synchronization operation can be shortened by setting the proportional gain large.
- the polarity of the output torque of the electric motor 3 can be switched on the inverter 62 side, thereby improving the responsiveness of disengaging the first-speed two-way roller clutch 16A.
- the second speed side standby position SP2n is a position immediately before the second speed friction plate 35B contacts the second speed output gear 10B.
- the output control of the electric motor 3 is performed when the shift ring 34 reaches the second speed shift position SP2f. Is switched from rotational speed control to torque control for controlling the output torque of the electric motor 3 to a preset target torque, and the output torque of the electric motor 3 is gradually raised in a ramp shape (fifth step S 5 ). As a result, the 2-speed 2-way roller clutch 16B as the next shift stage is engaged. Finally, the output torque of the electric motor 3 is changed to a torque corresponding to the accelerator opening.
- the upshift control when the upshift control is performed, the direction of the torque transmitted between the input shaft 7 and the output shaft 8 is reversed when the engagement of the first-speed two-way roller clutch 16A is released.
- the first-speed two-way roller clutch 16A can be reliably released.
- the shift time by the above-described shift-up control is within 300 msec.
- the electric motor 3 is controlled by rotational speed control. It is preferable to reverse the direction of the torque transmitted between the input shaft 7 and the output shaft 8 by decelerating the rotation speed of the first-speed two-way roller clutch 16A. In this way, when the deviation between the current rotation speed of the electric motor 3 and the target rotation speed is large, the output torque for releasing the engagement of the first-speed 2-way roller clutch 16A is a negative having a large absolute value. Since torque is generated in the electric motor 3, the subsequent sync operation can be performed quickly, and the time required for the completion of the sync operation can be effectively suppressed.
- FIG. 15 controls the output of the electric motor 3 so that immediately after the movement of the second step S 2 by the shift ring 34 has started (time t0), to release the engagement of the first speed of the two-way roller clutch 16A
- the shift ring shifts to the motor control start position SP1t set in advance between the first speed shift position SP1f and the second speed shift position SP2f.
- the output of the electric motor 3 be controlled so as to output a torque corresponding to the operation amount of the accelerator pedal 63 until 34 reaches (time t1). In this way, the torque transmitted between the input shaft 7 and the output shaft 8 is maintained between the times t0 and t1, so that the time for torque removal can be shortened.
- the shift ECU61 is, to release the engagement of the second speed of the two-way roller clutch 16B, issues a shift command downshift engaging the two-way roller clutch 16A of the first-speed (first step S 1).
- the shift motor 47 of the transmission 5 is operated to shift from the second speed shift position SP2f toward the first speed shift position SP1f as shown at times t0 to t1 in FIG.
- the movement of the ring 34 is started (second step S 2 ).
- a motor control start position set in advance between the second speed shift position SP2f and the first speed shift position SP1f.
- the output of the electric motor 3 is controlled so as to output a torque corresponding to the operation amount of the accelerator pedal 63.
- the output of the electric motor 3 is controlled so as to release the engagement of the second gear 2-way roller clutch 16B (third step S 3 ).
- the engagement of the two-speed two-way roller clutch 16B is achieved by setting the output torque of the electric motor 3 to zero or negative torque by torque control for controlling the output torque of the electric motor 3 to a preset target torque. Release the match.
- the shift motor 47 is temporarily stopped, and after the waiting time dt2, the shift motor 47 is operated again.
- the electric motor 3 is changed according to the deviation between the current rotation speed and the target rotation speed of the electric motor 3, as shown in FIG.
- the synchro operation is performed by controlling the rotational speed to change the magnitude of the output torque (fourth step S 4 ).
- the target rotational speed is the rotational speed Ngo ⁇ r1 of the input shaft 7 at the first speed obtained by multiplying the current rotational speed Ngo of the output shaft 8 by the reduction ratio r1 of the first speed.
- the target rotation speed Ngo ⁇ r1 is updated according to the current vehicle speed for each preset calculation cycle.
- the electric motor 3 After the rotational speed of the input shaft 7 in the fourth step S 4 is changed to a target speed corresponding to the speed ratio of the next shift stage, when the shift ring 34 has reached the first speed shift position SP1f, the electric motor 3 The output control is switched from rotational speed control to torque control for controlling the output torque of the electric motor 3 to a preset target torque, and the output torque of the electric motor 3 is gradually raised (fifth step S 5 ). As a result, the first-speed two-way roller clutch 16A as the next shift stage is engaged. Finally, the output torque of the electric motor 3 is changed to a torque corresponding to the accelerator opening.
- the second-speed two-way roller clutch 16B can be reliably disengaged.
- the shift time by the shift down control described above is within 300 msec.
- the output of the electric motor 3 is controlled so as to release the engagement of the second gear 2-way roller clutch 16B. It is also possible to configure. However, as shown in the above embodiment, after the shift ring 34 starts to move (time t0), the shift ring moves to the motor control start position SP2t set in advance between the first speed shift position SP1f and the second speed shift position SP2f. It is preferable that the output of the electric motor 3 be controlled so as to output a torque corresponding to the operation amount of the accelerator pedal 63 until 34 reaches (time t1). In this way, the torque transmitted between the input shaft 7 and the output shaft 8 is maintained between the times t0 and t1, so that the time for torque removal can be shortened.
- the synchro operation is performed by the rotational speed control that changes the magnitude of the output torque of the electric motor 3 in accordance with the deviation between the current rotational speed of the electric motor 3 and the target rotational speed.
- the deviation between the engine speed and the target engine speed is large, the magnitude of the output torque of the electric motor 3 increases, and as a result, the time required for the synchronization operation can be suppressed regardless of the vehicle speed when the gear position is switched. it can.
- the output control of the electric motor 3 is switched to the torque control, and the output torque of the electric motor 3 is gradually raised by the torque control. Therefore, the impact torque is applied to the 2-way roller clutch of the next shift stage. Is less likely to act and shift shocks are less likely to occur.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transportation (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Automation & Control Theory (AREA)
- Power Engineering (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Transmission Device (AREA)
- Arrangement Or Mounting Of Propulsion Units For Vehicles (AREA)
Abstract
2ウェイローラクラッチを用いた車両用モータ駆動装置の変速に要する時間を抑えるとともに、変速ショックを低減する。変速指令を出す第1ステップ(S1)と、1速シフト位置(SP1f)から2速シフト位置(SP2f)にシフトリング(34)を移動させる第2ステップ(S2)と、1速の2ウェイローラクラッチ(16A)の係合を解除するよう電動モータ(3)の出力を制御する第3ステップ(S3)と、回転数制御によりシンクロ動作を行なう第4ステップ(S4)と、電動モータ(3)の出力制御を、回転数制御からトルク制御に切り替え、そのトルク制御で電動モータ(3)の出力トルクを徐々に立ち上げる第5ステップ(S5)とを有する。
Description
この発明は、電動モータの回転を変速して車輪へ伝達する車両用モータ駆動装置の変速制御方法に関する。
電気自動車およびハイブリッド自動車の駆動装置に用いられる車両用モータ駆動装置として、電動モータと、その電動モータの回転を変速する変速機と、その変速機から出力された回転を左右の車輪に分配するディファレンシャルギヤとからなるものが従来から知られている。
この車両用モータ駆動装置を使用すると、走行条件に応じて変速機の変速比を切り換えることにより、駆動および回生時において、効率の高い回転数およびトルク領域で電動モータを使用することが可能となる。また、適切な変速比とすることで、高速走行時の変速機の回転部材の回転速度が下がり、変速機の動力損失が低減して車両のエネルギ効率を向上させることができる。
このような車両用モータ駆動装置として、例えば特許文献1に記載のものが知られている。特許文献1に記載の車両用モータ駆動装置は、電動モータと、その電動モータの回転が入力される入力軸と、入力軸に対して間隔をおいて平行に配置された出力軸と、入力軸に設けられた1速入力ギヤおよび2速入力ギヤと、出力軸に設けられ、1速入力ギヤおよび2速入力ギヤにそれぞれ噛合する1速出力ギヤおよび2速出力ギヤと、出力軸の回転を左右の車輪に分配するディファレンシャルギヤとを有し、
1速出力ギヤと2速出力ギヤは軸受を介してと出力軸で回転可能に支持され、
1速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチと、2速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチと、1速の2ウェイローラクラッチと2速の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設けた構成からなる。
1速出力ギヤと2速出力ギヤは軸受を介してと出力軸で回転可能に支持され、
1速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチと、2速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチと、1速の2ウェイローラクラッチと2速の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設けた構成からなる。
ここで、1速の2ウェイローラクラッチは、1速出力ギヤの内周に設けられた円筒面と、出力軸の外周に設けられたカム面と、そのカム面と円筒面の間に組み込まれたローラと、そのローラを保持し、カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で出力軸に対して相対回転可能に設けられた1速保持器と、その1速保持器を中立位置に弾性保持する1速スイッチばねとからなる構成のものであり、1速保持器を係合位置と中立位置の間で周方向に移動させることにより、トルクの伝達と遮断を切り換えることができるようになっている。2速の2ウェイローラクラッチも、1速の2ウェイローラクラッチと同様の構成である。
また、変速アクチュエータは、1速保持器に対して回り止めされかつ1速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた1速摩擦板と、その1速摩擦板を1速出力ギヤの側面から離反する方向に付勢する1速離反ばねと、2速保持器に対して回り止めされかつ2速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた2速摩擦板と、その2速摩擦板を2速出力ギヤの側面から離反する方向に付勢する2速離反ばねと、1速摩擦板を押圧して1速出力ギヤの側面に接触させる1速シフト位置と2速摩擦板を押圧して2速出力ギヤの側面に接触させる2速シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなる。
ところで、特許文献1に記載の車両用モータ駆動装置においては、変速段を切り替える変速指令が出たときに、まず、シフト機構を作動させることにより現変速段のシフト位置から次変速段のシフト位置へのシフトリングの移動を開始し、次に、現変速段の2ウェイローラクラッチの係合を解除するよう電動モータの出力トルクを変化させ、その後、入力軸の回転数が次変速段の変速比に対応する目標回転数に変化するよう電動モータをトルク制御で加速または減速させるようにしている。ここで、入力軸の回転数を次変速段の変速比に対応する目標回転数に変化させることをシンクロ動作という。そして、シンクロ動作が完了した後、シフトリングを次変速段のシフト位置に到達させ、次変速段の2ウェイローラクラッチを係合させる。
しかしながら、この特許文献1に記載された変速制御方法では、電動モータの出力トルクを予め設定された目標トルクに制御するトルク制御でシンクロ動作を行なっているので、次のような問題がある。すなわち、変速段を切り替えるときの車速は毎回異なるので、シンクロ動作の目標回転数も毎回異なる。そのため、トルク制御の目標トルクを目標回転数によらず一定としたのでは、現在の回転数と目標回転数の差が大きいときにシンクロ動作に要する時間が長くなってしまうという問題がある。また、トルク制御の目標トルクを車速毎に設定するのは煩雑である。
また、特許文献2では、速やかで円滑な変速制御方法として、変速開始時の車速に基づいて目標トルクを算出し、変速に要すると見込まれる所定時間が経過するまでの間、電動モータの出力トルクを目標トルクに制御することによってシンクロ動作を行なう方法が開示されている。しかしながら、この方法では、目標トルクが変速開始時の車速のみに基づいて定まるので、変速中に車速が変化するとき(例えば登坂時や降坂時)に、シンクロ動作が十分でない状態で次変速段のクラッチが係合してしまい、大きな変速ショックが生じるおそれがある。
この発明が解決しようとする課題は、2ウェイローラクラッチを用いた車両用モータ駆動装置の変速に要する時間を抑えるとともに、変速ショックを低減することである。
上記の課題を解決するため、この発明においては、電動モータと、その電動モータの回転が入力される入力軸と、前記入力軸に対して間隔をおいて平行に配置された出力軸と、
前記入力軸に設けられた第1入力ギヤおよび第2入力ギヤと、前記出力軸に設けられ、前記第1入力ギヤおよび第2入力ギヤにそれぞれ噛合する第1出力ギヤおよび第2出力ギヤと、前記出力軸の回転を左右の車輪に分配するディファレンシャルギヤとを有し、
前記第1入力ギヤと第2入力ギヤと入力軸の組と、前記第1出力ギヤと第2出力ギヤと出力軸の組とのうち一方を、第1クラッチギヤと第2クラッチギヤとこれらのクラッチギヤを軸受を介して回転可能に支持するクラッチギヤ支持軸とし、
前記第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチと、前記第2クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチと、前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設け、
前記第1の2ウェイローラクラッチは、第1クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第1保持器と、その第1保持器を前記中立位置に弾性保持する第1スイッチばねとからなり、
前記第2の2ウェイローラクラッチは、第2クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第2保持器と、その第2保持器を前記中立位置に弾性保持する第2スイッチばねとからなり、
前記変速アクチュエータは、前記第1保持器に対して回り止めされかつ前記第1クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板と、その第1摩擦板を前記第1クラッチギヤの側面から離反する方向に付勢する第1離反ばねと、前記第2保持器に対して回り止めされかつ前記第2クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板と、その第2摩擦板を前記第2クラッチギヤの側面から離反する方向に付勢する第2離反ばねと、前記第1摩擦板を押圧して前記第1クラッチギヤの側面に接触させる第1シフト位置と前記第2摩擦板を押圧して前記第2クラッチギヤの側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなる車両用モータ駆動装置の変速制御方法において、
前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチのうち現変速段の2ウェイローラクラッチの係合を解除して次変速段の2ウェイローラクラッチを係合させる変速指令を出す第1ステップと、
この第1ステップで前記変速指令が出たときに、前記シフト機構を作動させることにより前記第1シフト位置と第2シフト位置のうち現変速段のシフト位置から次変速段のシフト位置に前記シフトリングを移動させる第2ステップと、
この第2ステップによるシフトリングの移動が開始した後、現変速段の2ウェイローラクラッチの係合を解除するよう前記電動モータの出力を制御する第3ステップと、
この第3ステップで現変速段の2ウェイローラクラッチの係合が解除された後、前記電動モータの現在の回転数と目標回転数との偏差に応じて電動モータの出力トルクの大きさを変化させる回転数制御により前記入力軸の回転数を次変速段の変速比に対応する目標回転数に変化させる第4ステップと、
この第4ステップで前記入力軸の回転数が次変速段の変速比に対応する目標回転数に変化した後、前記電動モータの出力制御を、前記回転数制御から前記電動モータの出力トルクを予め設定された目標トルクに制御するトルク制御に切り替え、そのトルク制御で電動モータの出力トルクを徐々に立ち上げる第5ステップとを有する変速制御方法を採用した。
前記入力軸に設けられた第1入力ギヤおよび第2入力ギヤと、前記出力軸に設けられ、前記第1入力ギヤおよび第2入力ギヤにそれぞれ噛合する第1出力ギヤおよび第2出力ギヤと、前記出力軸の回転を左右の車輪に分配するディファレンシャルギヤとを有し、
前記第1入力ギヤと第2入力ギヤと入力軸の組と、前記第1出力ギヤと第2出力ギヤと出力軸の組とのうち一方を、第1クラッチギヤと第2クラッチギヤとこれらのクラッチギヤを軸受を介して回転可能に支持するクラッチギヤ支持軸とし、
前記第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチと、前記第2クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチと、前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設け、
前記第1の2ウェイローラクラッチは、第1クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第1保持器と、その第1保持器を前記中立位置に弾性保持する第1スイッチばねとからなり、
前記第2の2ウェイローラクラッチは、第2クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第2保持器と、その第2保持器を前記中立位置に弾性保持する第2スイッチばねとからなり、
前記変速アクチュエータは、前記第1保持器に対して回り止めされかつ前記第1クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板と、その第1摩擦板を前記第1クラッチギヤの側面から離反する方向に付勢する第1離反ばねと、前記第2保持器に対して回り止めされかつ前記第2クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板と、その第2摩擦板を前記第2クラッチギヤの側面から離反する方向に付勢する第2離反ばねと、前記第1摩擦板を押圧して前記第1クラッチギヤの側面に接触させる第1シフト位置と前記第2摩擦板を押圧して前記第2クラッチギヤの側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなる車両用モータ駆動装置の変速制御方法において、
前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチのうち現変速段の2ウェイローラクラッチの係合を解除して次変速段の2ウェイローラクラッチを係合させる変速指令を出す第1ステップと、
この第1ステップで前記変速指令が出たときに、前記シフト機構を作動させることにより前記第1シフト位置と第2シフト位置のうち現変速段のシフト位置から次変速段のシフト位置に前記シフトリングを移動させる第2ステップと、
この第2ステップによるシフトリングの移動が開始した後、現変速段の2ウェイローラクラッチの係合を解除するよう前記電動モータの出力を制御する第3ステップと、
この第3ステップで現変速段の2ウェイローラクラッチの係合が解除された後、前記電動モータの現在の回転数と目標回転数との偏差に応じて電動モータの出力トルクの大きさを変化させる回転数制御により前記入力軸の回転数を次変速段の変速比に対応する目標回転数に変化させる第4ステップと、
この第4ステップで前記入力軸の回転数が次変速段の変速比に対応する目標回転数に変化した後、前記電動モータの出力制御を、前記回転数制御から前記電動モータの出力トルクを予め設定された目標トルクに制御するトルク制御に切り替え、そのトルク制御で電動モータの出力トルクを徐々に立ち上げる第5ステップとを有する変速制御方法を採用した。
この変速制御方法を採用すると、電動モータの現在の回転数と目標回転数との偏差に応じて電動モータの出力トルクの大きさを変化させる回転数制御でシンクロ動作を行なうので、現在の回転数と目標回転数の偏差が大きいときは、電動モータの出力トルクの大きさが大きくなり、その結果、変速段を切り替えるときの車速にかかわらず、シンクロ動作に要する時間を抑えることができる。また、シンクロ動作が完了した後は、電動モータの出力制御をトルク制御に切り替え、そのトルク制御で電動モータの出力トルクを徐々に立ち上げるので、次変速段の2ウェイローラクラッチに衝撃トルクが作用しにくく、変速ショックが生じにくい。
前記第3ステップは、前記変速指令がシフトアップ指令のとき、前記回転数制御で電動モータの回転数を減速することによって、現変速段の2ウェイローラクラッチの係合を解除するように構成することができる。このようにすると、電動モータの現在の回転数と目標回転数との偏差が大きいときに、現変速段の2ウェイローラクラッチの係合を解除するための出力トルクとして、絶対値の大きい負トルクが電動モータで発生するので、その後のシンクロ動作が完了するまでに要する時間を効果的に抑えることが可能となる。
前記第3ステップは、前記変速指令がシフトダウン指令のとき、前記トルク制御で電動モータの出力トルクをゼロまたは負トルクにすることによって、現変速段の2ウェイローラクラッチの係合を解除するように構成することができる。このようにすると、現変速段の2ウェイローラクラッチを係合解除するときの入力軸の減速を最小限に抑えることができ、その後のシンクロ動作が完了するまでに要する時間を効果的に抑えることが可能となる。
前記第4ステップは、前記回転数制御を行なう間、予め設定された演算周期ごとに現在の車速に応じて目標回転数を更新するように構成することができる。このようにすると、変速中に車速が変化するとき(例えば登坂時や降坂時)に、現在の車速に応じて目標回転数が更新されるので、シンクロ動作が十分でない状態で次変速段のクラッチが係合してしまうようなことがなく、変速ショックを確実に抑えることができる。
前記第4ステップは、現在の電動モータの回転数の目標回転数に対する偏差がゼロに収束するように電動モータの回転数を制御するように構成することができ、さらに、電動モータの現在の回転数の目標値に対する偏差がゼロに収束した後も、前記シフトリングが次変速段のシフト位置に到達するまでの間は、電動モータの現在の回転数の目標回転数に対する偏差をゼロに維持するように電動モータの回転数を制御するように構成することができる。このような前記第4ステップの回転数制御として、例えば、比例動作に積分動作を加えたPI制御を採用することができる。
前記第3ステップは、前記第2ステップによるシフトリングの移動が開始した直後に、現変速段の2ウェイローラクラッチの係合を解除するよう前記電動モータの出力を制御するように構成することも可能である。しかし、前記第3ステップは、前記第2ステップによるシフトリングの移動が開始した後、前記第1シフト位置と第2シフト位置の間に予め設定されたモータ制御開始位置にシフトリングが到達するまでの間は、アクセルペダルの操作量に応じたトルクを出力するよう前記電動モータの出力を制御し、前記モータ制御開始位置にシフトリングが到達したときに、現変速段の2ウェイローラクラッチの係合を解除するよう前記電動モータの出力を制御するように構成すると好ましい。このようにすると、第2ステップによるシフトリングの移動が開始してから、モータ制御開始位置にシフトリングが到達するまでの間は、入力軸と出力軸の間で伝達するトルクが維持され、トルク抜けが生じないことから、第2ステップによるシフトリングの移動が開始した直後に、現変速段の2ウェイローラクラッチの係合を解除するよう電動モータの出力を制御する場合と比較して、トルク抜けの時間が短く済む。
電気自動車の左右一対の前輪と左右一対の後輪のうち少なくとも一方を前記車両用モータ駆動装置で駆動する場合、その車両用モータ駆動装置を上記の変速制御方法で制御することができる。
また、ハイブリッド自動車の左右一対の前輪と左右一対の後輪のうち一方をエンジンで駆動し、他方を前記車両用モータ駆動装置で駆動する場合、その車両用モータ駆動装置を上記の変速制御方法で制御することができる。
この発明の車両用モータ駆動装置の変速制御方法は、シンクロ動作を行なうときに、電動モータの現在の回転数と目標回転数との偏差に応じて電動モータの出力トルクの大きさが変化するので、シンクロ動作に要する時間が短い。また、シンクロ動作が完了した後は、トルク制御で電動モータの出力トルクを徐々に立ち上げるので、変速ショックが生じにくい。
以下、この発明の実施形態にかかる車両用モータ駆動装置Aの変速制御方法を説明する。図1は、左右一対の前輪1を車両用モータ駆動装置Aで駆動される駆動輪とし、左右一対の後輪2を従動輪とした電気自動車EVを示す。
図2は、左右一対の前輪1をエンジンEによって駆動される主駆動輪とし、左右一対の後輪2をこの発明に係る車両用モータ駆動装置Aで駆動される補助駆動輪としたハイブリッド自動車HVを示す。ハイブリッド自動車HVには、エンジンEの回転を変速するトランスミッションTと、トランスミッションTから出力された回転を左右の前輪1に分配するディファレンシャルギヤDとが設けられている。
図3に示すように、車両用モータ駆動装置Aは、電動モータ3と、電動モータ3のモータ軸4の回転を変速して出力する変速機5と、その変速機5から出力された回転を図1に示す電気自動車EVの左右一対の前輪1に分配し、または、図2に示すハイブリッド自動車HVの左右一対の後輪2に分配するディファレンシャルギヤ6とを有する。
変速機5は、図3に示すように、モータ軸4の回転が入力される入力軸7と、入力軸7に対して間隔をおいて平行に配置された出力軸8と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、出力軸8に設けられた1速出力ギヤ10Aおよび2速出力ギヤ10Bとを有する。
モータ軸4は、入力軸7と同軸上に直列に配置されており、ハウジング11に固定された電動モータ3のステータ12で回転駆動される。入力軸7は、ハウジング11内に組込まれた対向一対の軸受13により回転可能に支持され、入力軸7の軸端はスプライン嵌合によってモータ軸4に接続されている。出力軸8は、ハウジング11内に組込まれた対向一対の軸受14により回転可能に支持されている。
1速入力ギヤ9Aと2速入力ギヤ9Bは軸方向に間隔をおいて配置され、入力軸7を中心として入力軸7と一体に回転するように入力軸7に固定されている。1速出力ギヤ10Aと2速出力ギヤ10Bも軸方向に間隔をおいて配置されている。
図4に示すように、1速出力ギヤ10Aは、出力軸8を貫通させる環状に形成され、軸受15を介して出力軸8で支持されており、出力軸8を中心として出力軸8に対して回転可能となっている。同様に、2速出力ギヤ10Bも、軸受15を介して出力軸8で回転可能に支持されている。
1速入力ギヤ9Aと1速出力ギヤ10Aは互いに噛合しており、その噛合によって1速入力ギヤ9Aと1速出力ギヤ10Aの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bも噛合しており、その噛合によって2速入力ギヤ9Bと2速出力ギヤ10Bの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bの減速比は、1速入力ギヤ9Aと1速出力ギヤ10Aの減速比よりも小さい。
1速出力ギヤ10Aと出力軸8の間には、1速出力ギヤ10Aと出力軸8の間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチ16Aが組込まれている。また、2速出力ギヤ10Bと出力軸8の間には、2速出力ギヤ10Bと出力軸8の間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチ16Bが組込まれている。
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、左右対称の同一構成なので、2速の2ウェイローラクラッチ16Bを以下に説明し、1速の2ウェイローラクラッチ16Aについては、2速の2ウェイローラクラッチ16Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
図5~図7に示すように、2速の2ウェイローラクラッチ16Bは、2速出力ギヤ10Bの内周に設けられた円筒面17と、出力軸8の外周に回り止めした環状の2速カム部材18Bに形成されたカム面19と、カム面19と円筒面17の間に組み込まれたローラ20と、ローラ20を保持する2速保持器21Bと、2速スイッチばね22Bとからなる。カム面19は、円筒面17との間で周方向中央から周方向両端に向かって次第に狭くなるくさび形空間を形成するような面であり、例えば、図6に示すように円筒面17と対向する平坦面である。
図4、図10に示すように、2速保持器21Bは、ローラ20を収容する複数のポケット23が周方向に間隔をおいて形成された円筒部24と、円筒部24の一端から径方向内方に延び出す内向きフランジ部25とを有する。内向きフランジ部25の径方向内端は、2速カム部材18Bの外周で周方向にスライド可能に支持され、この周方向のスライドによって、2速保持器21Bは、カム面19と円筒面17の間にローラ20を係合させる係合位置とローラ20の係合を解除する中立位置との間で出力軸8に対して相対回転可能となっている。また、2速保持器21Bの内向きフランジ部25は軸方向両側への移動が規制され、これにより2速保持器21Bが軸方向に非可動とされている。
図6に示すように、各カム面19は、回転中心を含む仮想平面に対して対称に形成され、これにより、各カム面19と円筒面17の間に配置されたローラ20は、正転方向と逆転方向の両方向で係合可能となっている。すなわち、電動モータ3が発生するトルクにより車両を前進させるときは、2速保持器21Bを出力軸8に対して正転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の正転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ10Bと出力軸8の間で正転方向のトルクを伝達することが可能となっており、一方、電動モータ3が発生するトルクにより車両を後退させるときは、2速保持器21Bを出力軸8に対して逆転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の逆転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ10Bと出力軸8の間で逆転方向のトルクを伝達することが可能となっている。
図7、図10に示すように、2速スイッチばね22Bは、鋼線をC形に巻いたC形環状部26と、C形環状部26の両端からそれぞれ径方向外方に延出する一対の延出部27,27とからなる。C形環状部26は、2速カム部材18Bの軸方向端面に形成された円形のスイッチばね収容凹部28に嵌め込まれ、一対の延出部27,27は、2速カム部材18Bの軸方向端面に形成された径方向溝29に挿入されている。
径方向溝29は、スイッチばね収容凹部28の内周縁から径方向外方に延びて2速カム部材18Bの外周に至るように形成されている。2速スイッチばね22Bの延出部27は、径方向溝29の径方向外端から突出しており、その延出部27の径方向溝29からの突出部分が、2速保持器21Bの円筒部24の軸方向端部に形成された切欠き30に挿入されている。径方向溝29と切欠き30は同じ幅に形成されている。
延出部27,27は、径方向溝29の周方向で対向する内面と、切欠き30の周方向で対向する内面にそれぞれ接触しており、その接触面に作用する周方向の力によって2速保持器21Bを中立位置に弾性保持している。
すなわち、2速保持器21Bを出力軸8に対して相対回転させて、図7に示す中立位置から周方向に移動させると、径方向溝29の位置と切欠き30の位置が周方向にずれるので、一対の延出部27,27の間隔が狭まる方向にC形環状部26が弾性変形し、その弾性復元力によって2速スイッチばね22Bの一対の延出部27,27が径方向溝29の内面と切欠き30の内面を押圧し、その押圧によって2速保持器21Bを中立位置に戻す方向の力が作用するようになっている。
図4に示すように、1速カム部材18Aと2速カム部材18Bの出力軸8に対する回り止めは、スプライン嵌合によって行なわれている。1速カム部材18Aのカム面19と2速カム部材18Bのカム面19は同数かつ同位相となっている。また、1速カム部材18Aと2速カム部材18Bは、出力軸8の外周に嵌合した一対の止め輪31によって軸方向に非可動となっている。1速カム部材18Aと2速カム部材18Bの間には間座32が組み込まれている。
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、変速アクチュエータ33により選択的に係合することができるようになっている。
図5に示すように、変速アクチュエータ33は、1速出力ギヤ10Aと2速出力ギヤ10Bの間に軸方向に移動可能に設けられたシフトリング34と、1速出力ギヤ10Aとシフトリング34の間に組み込まれた1速摩擦板35Aと、2速出力ギヤ10Bとシフトリング34の間に組み込まれた2速摩擦板35Bとを有する。
ここで、1速摩擦板35Aと2速摩擦板35Bは、左右対称の同一構成なので、2速摩擦板35Bを以下に説明し、1速摩擦板35Aについては、2速摩擦板35Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
2速摩擦板35Bには、2速保持器21Bの切欠き30に係合する突片36が設けられ、この突片36と切欠き30の係合によって、2速摩擦板35Bが2速保持器21Bに回り止めされている。2速保持器21Bの切欠き30は、2速摩擦板35Bの突片36を軸方向にスライド可能に収容しており、このスライドによって、2速摩擦板35Bは、2速保持器21Bに回り止めされた状態のまま、2速出力ギヤ10Bの側面に接触する位置と離反する位置との間で、2速保持器21Bに対して軸方向に移動可能となっている。
2速摩擦板35Bの突片36の先端に凹部37が形成されて、間座32の外周には、凹部37に係合する凸部38が形成されている。そして、凹部37と凸部38は、2速摩擦板35Bが2速出力ギヤ10Bの側面から離反した位置にある状態では、凹部37と凸部38が係合することで、2速摩擦板35Bを間座32を介して出力軸8に回り止めし、このとき、2速摩擦板35Bに回り止めされた2速保持器21Bが中立位置に保持されるようになっている。また、2速摩擦板35Bが2速出力ギヤ10Bの側面に接触する位置にある状態では、凹部37と凸部38の係合が解除することで、2速摩擦板35Bの回り止めが解除されるようになっている。
2速摩擦板35Bと2速カム部材18Bの間には、軸方向に圧縮された状態で2速離反ばね39Bが組み込まれており、この2速離反ばね39Bの弾性復元力によって2速摩擦板35Bが2速出力ギヤ10Bの側面から離反する方向に付勢されている。
2速離反ばね39Bは、間座32の外周に沿って巻回されたコイルスプリングであり、その一端が2速ワッシャ40Bを介して2速カム部材18Bの軸方向端面で支持されている。2速ワッシャ40Bは、2速カム部材18Bの軸方向端面の径方向溝29を覆うように環状に形成されている。
シフトリング34は、1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させる1速シフト位置SP1fと、2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させる2速シフト位置SP2fとの間で軸方向に移動可能に支持されている。また、シフトリング34を1速シフト位置SP1fと2速シフト位置SP2fの間で軸方向に移動させるシフト機構41が設けられている。
図8、図9に示すように、シフト機構41は、シフトリング34を転がり軸受42を介して回転可能に支持するシフトスリーブ43と、そのシフトスリーブ43の外周に設けられた環状溝44に係合する二股状のシフトフォーク45と、シフトフォーク45が固定されたシフトロッド46と、シフトモータ47と、シフトモータ47の回転をシフトロッド46の直線運動に変換する運動変換機構48(送りねじ機構等)とからなる。
図9に示すように、シフトロッド46は、出力軸8に対して間隔をおいて平行に配置され、ハウジング11内に組み込まれた一対の滑り軸受49で軸方向にスライド可能に支持されている。シフトリング34とシフトスリーブ43の間に組み込まれた転がり軸受42は、シフトリング34とシフトスリーブ43のいずれに対しても軸方向に非可動となるように組み付けられている。
このシフト機構41は、シフトモータ47の回転が運動変換機構48により直線運動に変換されてシフトフォーク45に伝達し、そのシフトフォーク45の直線運動が転がり軸受42を介してシフトリング34に伝達することにより、シフトリング34を軸方向に移動させる。
図5に示すように、シフトフォーク45と環状溝44の間の両側の軸方向隙間には、軸方向に圧縮可能な予圧ばね50が組み込まれている。これにより、シフトリング34で1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させるときに、シフトスリーブ43に対するシフトフォーク45の軸方向の相対位置を調節することによって予圧ばね50のばね力を調節し、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力を調整することが可能となっている。また、シフトリング34で2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させるときも、2速摩擦板35Bと2速出力ギヤ10Bの接触面間の摩擦力を調整することが可能となっている。
図3に示すように、出力軸8には、出力軸8の回転をディファレンシャルギヤ6に伝達するディファレンシャル駆動ギヤ51が固定されている。
ディファレンシャルギヤ6は、一対の軸受52で回転可能に支持されたデフケース53と、デフケース53の回転中心と同軸にデフケース53に固定され、ディファレンシャル駆動ギヤ51に噛合するリングギヤ54と、デフケース53の回転中心と直角な方向にデフケース53に固定されたピニオン軸55と、ピニオン軸55に回転可能に支持された一対のピニオン56と、その一対のピニオン56に噛合する左右一対のサイドギヤ57とからなる。左側のサイドギヤ57には、左側の車輪に接続されたアクスル58の軸端部が接続され、右側のサイドギヤ57には、右側の車輪に接続されたアクスル58の軸端部が接続されている。出力軸8が回転するとき、出力軸8の回転はディファレンシャル駆動ギヤ51を介してデフケース53に伝達され、そのデフケース53の回転がピニオン56とサイドギヤ57を介して左右の車輪に分配される。
車両用モータ駆動装置Aは、図11に示す制御システムによって制御される。この制御システムは、統合ECU60と変速ECU61とインバータ62とを有する。統合ECU60は、図示しない車両用ブレーキ装置やステアリング装置と協調して指示を出す電子制御装置である。統合ECU60はアクセルペダル63に接続されており、アクセルペダル63からの信号に基づいて算出されるアクセル開度に対応する信号を変速ECU61に出力する。変速ECU61は、各種入力信号に基づいて変速判断を行ない、変速機5とインバータ62に指令を出す電子制御装置である。
変速ECU61には、運転者により操作される変速操作部64(例えば、自動変速モードと手動変速モードを切り替えるタクトスイッチや、手動変速モードにおいて変速段を手動で切り替えるためのシフトレバー)から変速操作の状態を示す信号が入力される。また、変速ECU61には、車速センサ65から現在の車両の速度を示す信号が入力される。
変速ECU61には、自動変速モードと手動変速モードとステップモードの3つの変速モードがプログラムされている。自動変速モードと手動変速モードは、運転者による変速操作部64の操作によって切り替えられる。
自動変速モードは、アクセル開度と車速と自動変速線図(図12を参照)に基づいて、図13に示すように自動で変速するモードである。この自動変速モードでは、例えば、車速が加速している状態でシフトアップ線を左から右にまたぐときに、シフトアップ動作を行なう。また、車速が一定速度の状態でシフトアップ線を上から下にまたぐときに、シフトアップ動作を行なう。また、車速が減速している状態でシフトダウン線を右から左にまたぐときに、シフトダウン動作を行なう。また、車速が一定速度の状態でシフトダウン線を下から上にまたぐときに、シフトダウン動作を行なう。手動変速モードは、自動変速線図上で変速を行なわない領域でも手動操作によって変速するモードである。ステップモードは、停車状態のときに変速段を選択するモードである。
図11に示すインバータ62は、電動モータ3に電力を供給するとともに、その供給電力を変速ECU61からの信号に基づいて制御する。インバータ62には、電動モータ3に取り付けられたレゾルバ66から、電動モータ3の回転数を示す信号が入力される。
以下に、車両用モータ駆動装置Aの動作例を説明する。
まず、図5に示すように、1速摩擦板35Aが1速出力ギヤ10Aの側面から離反し、かつ、2速摩擦板35Bも2速出力ギヤ10Bの側面から離反した状態では、1速保持器21Aは1速スイッチばね22Aの弾性力により中立位置に保持され、2速保持器21Bも2速スイッチばね22Bの弾性力により中立位置に保持されるので、1速の2ウェイローラクラッチ16Aはローラ20の係合が解除された状態となり、2速の2ウェイローラクラッチ16Bもローラ20の係合が解除された状態となる。
この状態では、図3に示す電動モータ3の駆動により入力軸7が回転しても、1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bによって回転の伝達が遮断されるので、1速出力ギヤ10Aおよび2速出力ギヤ10Bは空転し、入力軸7の回転は出力軸8に伝達されない。
次に、シフト機構41を作動させて、図5に示すシフトリング34を1速出力ギヤ10Aに向けて移動させると、1速摩擦板35Aが1速出力ギヤ10Aの側面に接触し、その接触面間の摩擦力によって1速摩擦板35Aが出力軸8に対して相対回転し、この1速摩擦板35Aに回り止めされた1速保持器21Aが1速スイッチばね22Aの弾性力に抗して中立位置から係合位置に移動するので、1速保持器21Aに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
この状態では、1速出力ギヤ10Aの回転は、1速の2ウェイローラクラッチ16Aを介して出力軸8に伝達され、出力軸8の回転が、ディファレンシャルギヤ6を介してアクスル58に伝達される。その結果、図1に示す電気自動車EVにおいては、駆動輪としての前輪1が回転駆動され、図2に示すハイブリッド自動車HVにおいては補助駆動輪としての後輪2が回転駆動される。
次に、シフト機構41の作動により、シフトリング34を1速シフト位置から2速シフト位置に向かって軸方向移動させると、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力が小さくなるので、1速スイッチばね22Aの弾性力により1速保持器21Aが係合位置から中立位置に移動し、この1速保持器21Aの移動によって1速の2ウェイローラクラッチ16Aの係合が解除される。
シフトリング34が2速シフト位置に到達すると、2速摩擦板35Bがシフトリング34で押圧されて2速出力ギヤ10Bの側面に接触し、その接触面間の摩擦力によって2速摩擦板35Bが出力軸8に対して相対回転し、2速摩擦板35Bに回り止めされた2速保持器21Bが2速スイッチばね22Bの弾性力に抗して中立位置から係合位置に移動するので、2速保持器21Bに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
この状態では、2速出力ギヤ10Bの回転は、2速の2ウェイローラクラッチ16Bを介して出力軸8に伝達され、出力軸8の回転がディファレンシャルギヤ6を介してアクスル58に伝達される。
同様に、シフトリング34を2速シフト位置から1速シフト位置に軸方向移動させることにより、2速の2ウェイローラクラッチ16Bの係合を解除して、1速の2ウェイローラクラッチ16Aを係合させることができる。
ところで、1速の2ウェイローラクラッチ16Aを係合解除するときに、1速の2ウェイローラクラッチ16Aを介してトルクが伝達していると、そのトルクがローラ20を円筒面17とカム面19の間のくさび形空間の狭小部分に押し込むように作用し、1速の2ウェイローラクラッチ16Aの係合解除が妨げられる。そのため、シフト機構41の作動により、シフトリング34が1速シフト位置SP1fから2速シフト位置SP2fに向かって軸方向移動を開始したときに、1速摩擦板35Aが、1速出力ギヤ10Aの側面から既に離反しているにもかかわらず、1速の2ウェイローラクラッチ16Aの係合が解除されない可能性がある。
このため、1速の2ウェイローラクラッチ16Aを確実に係合解除するためには、シフト機構41の作動により、1速摩擦板35Aを1速出力ギヤ10Aの側面から離反させるだけでなく、電動モータ3の出力を制御して、入力軸7と出力軸8の間で伝達するトルクを変化させる必要がある。2速の2ウェイローラクラッチ16Bを係合解除するときも同様である。
そこで、上記制御システムでは、図14に示すように、電動モータ3とシフトモータ47を制御し、この制御により1速の2ウェイローラクラッチ16Aまたは2速の2ウェイローラクラッチ16Bの係合を解除するときの動作の信頼性を確保している。
図14に基づいて、シフトアップ時の制御について説明する。
まず、変速ECU61が、1速の2ウェイローラクラッチ16Aの係合を解除して、2速の2ウェイローラクラッチ16Bを係合させるシフトアップの変速指令を出す(第1ステップS1)。この変速指令を出すか否かは、自動変速モードのときは、アクセル開度と車速と自動変速線図(図12を参照)に基づいて判断され、手動変速モードのときは、運転者による変速操作部64の操作に基づいて判断される。
第1ステップS1で変速指令が出たときは、変速機5のシフトモータ47を作動させ、図15の時刻t0~t1に示すように、1速シフト位置SP1fから2速シフト位置SP2fに向けてシフトリング34の移動を開始する(第2ステップS2)。ここで、シフトリング34が1速シフト位置SP1fから2速シフト位置SP2fに向かって移動を開始してから、1速シフト位置SP1fと2速シフト位置SP2fの間に予め設定されたモータ制御開始位置SP1tに到達するまでの間は、アクセルペダル63の操作量に応じたトルクを出力するよう電動モータ3の出力を制御する。この間、アクセルペダル63の操作量に応じたトルクが入力軸7と出力軸8の間で伝達し、そのトルクがローラ20を円筒面17とカム面19の間のくさび形空間の狭小部分に押し込むように作用するので、1速摩擦板35Aと1速出力ギヤ10Aの間の摩擦が解除されても、1速の2ウェイローラクラッチ16Aの係合は解除されない。
次に、シフトリング34がモータ制御開始位置SP1tに到達したときに、1速の2ウェイローラクラッチ16Aの係合を解除するよう電動モータ3の出力を制御する(第3ステップS3)。具体的には、図16に示すように、電動モータ3の現在の回転数と目標回転数との偏差に応じて電動モータ3の出力トルクの大きさを変化させる回転数制御により、電動モータ3の回転数を減速することによって、1速の2ウェイローラクラッチ16Aの係合を解除する。1速側のトルク制御開始位置SP1tは、例えば、1速摩擦板35Aが1速出力ギヤ10Aの側面と接触しているが、その接触面間の摩擦力が1速スイッチばね22Aの弾性力よりも小さくなる位置とすることができる。
この第3ステップS3で1速の2ウェイローラクラッチ16Aの係合が解除された後、引き続き、図16に示すように、電動モータ3の現在の回転数と目標回転数との偏差に応じて電動モータ3の出力トルクの大きさを変化させる回転数制御により、入力軸7の回転数を2速の変速比r2に対応する目標回転数に変化させる動作(すなわちシンクロ動作)を行なう(第4ステップS4)。ここで、目標回転数は、次変速段の変速比に対応する入力軸7の回転数、すなわち、現在の出力軸8の回転数Ngoに2速の減速比r2を乗じて得られる2速での入力軸7の回転数Ngo×r2である(図15参照)。
図16に示す回転数制御を行なう間、目標回転数Ngo×r2は、予め設定された演算周期ごと(例えば1msecごと)に現在の車速に応じて更新する。したがって、変速中に車速が変化するとき(例えば登坂時や降坂時や制動時)にも、車速の変化に追従してシンクロ動作を行なうことができる。ここで、図16に示す回転数制御は、比例動作に積分動作を加えたPI制御であり、レゾルバ66で検出した電動モータ3の実際の回転数をフィードバックし、電動モータ3の実際の回転数と目標回転数の偏差をトルク指令に変換し、そのトルク指令を電動モータ3の電流値に変換して、電動モータ3に印加する。
このPI制御は、比例ゲインと積分ゲインを調整することにより、シフトリング34が2速側の待機位置SP2nに到達する前に、現在の電動モータ3の回転数の目標回転数に対する偏差を0rpmに収束させ、その後も、シフトリング34が2速側の待機位置SP2nに到達するまでの間、電動モータ3の現在の回転数の目標回転数に対する偏差DN2を0rpmに維持することが可能である。ここで、比例ゲインと積分ゲインは、インバータ62側で設定することができ、比例ゲインを大きく設定することにより、シンクロ動作に要する時間を短縮することができる。また、電動モータ3の出力トルクの正負もインバータ62側で切り換え可能とされ、これにより1速の2ウェイローラクラッチ16Aの係合解除の応答性を高めるようにしている。2速側の待機位置SP2nは、2速摩擦板35Bが2速出力ギヤ10Bに接触する直前の位置である。
この第4ステップで入力軸7の回転数が2速の変速比r2に対応する目標回転数に変化した後、シフトリング34が2速シフト位置SP2fに到達したときに、電動モータ3の出力制御を回転数制御から電動モータ3の出力トルクを予め設定された目標トルクに制御するトルク制御に切り替え、電動モータ3の出力トルクをランプ状に徐々に立ち上げる(第5ステップS5)。これにより、次変速段としての2速の2ウェイローラクラッチ16Bが係合する。最後に、電動モータ3の出力トルクをアクセル開度に応じたトルクに変化させる。
以上のように、シフトアップの制御を行なうと、1速の2ウェイローラクラッチ16Aの係合を解除する際に、入力軸7と出力軸8の間で伝達するトルクの方向が逆転するので、1速の2ウェイローラクラッチ16Aを確実に係合解除することができる。上述したシフトアップの制御による変速時間は300msec以内である。
ここで、入力軸7と出力軸8の間で伝達するトルクの方向を逆転させる方法としてトルク制御を採用することも可能であるが、この実施形態に示すように、回転数制御で電動モータ3の回転数を減速することによって、入力軸7と出力軸8の間で伝達するトルクの方向を逆転させ、1速の2ウェイローラクラッチ16Aの係合を解除すると好ましい。このようにすると、電動モータ3の現在の回転数と目標回転数との偏差が大きいときに、1速の2ウェイローラクラッチ16Aの係合を解除するための出力トルクとして、絶対値の大きい負トルクが電動モータ3で発生するので、その後のシンクロ動作を迅速に行なうことができ、シンクロ動作が完了するまでに要する時間を効果的に抑えることが可能となる。
また、図15において、第2ステップS2によるシフトリング34の移動が開始(時刻t0)した直後に、1速の2ウェイローラクラッチ16Aの係合を解除するよう電動モータ3の出力を制御するように構成することも可能である。しかし、上記実施形態に示すように、シフトリング34の移動が開始(時刻t0)した後、1速シフト位置SP1fと2速シフト位置SP2fの間に予め設定されたモータ制御開始位置SP1tにシフトリング34が到達(時刻t1)するまでの間は、アクセルペダル63の操作量に応じたトルクを出力するよう電動モータ3の出力を制御するように構成すると好ましい。このようにすると、時刻t0~t1の間は入力軸7と出力軸8の間で伝達するトルクが維持されることから、トルク抜けの時間が短く済む。
次に、図14に基づいて、シフトダウン時の制御について説明する。
まず、変速ECU61が、2速の2ウェイローラクラッチ16Bの係合を解除して、1速の2ウェイローラクラッチ16Aを係合させるシフトダウンの変速指令を出す(第1ステップS1)。
第1ステップで変速指令が出たときは、変速機5のシフトモータ47を作動させ、図17の時刻t0~t1に示すように、2速シフト位置SP2fから1速シフト位置SP1fに向けてシフトリング34の移動を開始する(第2ステップS2)。ここで、シフトリング34が2速シフト位置SP2fから1速シフト位置SP1fに向かって移動を開始してから、2速シフト位置SP2fと1速シフト位置SP1fの間に予め設定されたモータ制御開始位置SP2tに到達するまでの間は、アクセルペダル63の操作量に応じたトルクを出力するよう電動モータ3の出力を制御する。
次に、シフトリング34がモータ制御開始位置SP2tに到達したときに、2速の2ウェイローラクラッチ16Bの係合を解除するよう電動モータ3の出力を制御する(第3ステップS3)。具体的には、電動モータ3の出力トルクを予め設定された目標トルクに制御するトルク制御によって電動モータ3の出力トルクをゼロまたは負トルクにすることによって、2速の2ウェイローラクラッチ16Bの係合を解除する。このとき、シフトモータ47を一旦停止し、待ち時間dt2を経た後、シフトモータ47を再び作動させる。
この第3ステップで2速の2ウェイローラクラッチ16Bの係合が解除された後、図16に示すように、電動モータ3の現在の回転数と目標回転数との偏差に応じて電動モータ3の出力トルクの大きさを変化させる回転数制御によりシンクロ動作を行なう(第4ステップS4)。ここで、目標回転数は、現在の出力軸8の回転数Ngoに1速の減速比r1を乗じて得られる1速での入力軸7の回転数Ngo×r1である。図13に示す回転数制御を行なう間、目標回転数Ngo×r1は、予め設定された演算周期ごとに現在の車速に応じて更新する。
この第4ステップS4で入力軸7の回転数が次変速段の変速比に対応する目標回転数に変化した後、シフトリング34が1速シフト位置SP1fに到達したときに、電動モータ3の出力制御を回転数制御から電動モータ3の出力トルクを予め設定された目標トルクに制御するトルク制御に切り替え、電動モータ3の出力トルクを徐々に立ち上げる(第5ステップS5)。これにより、次変速段としての1速の2ウェイローラクラッチ16Aが係合する。最後に、電動モータ3の出力トルクをアクセル開度に応じたトルクに変化させる。
以上のように、シフトダウンの制御を行なうと、2速の2ウェイローラクラッチ16Bの係合を解除する際に、入力軸7と出力軸8の間で伝達するトルクの方向がゼロになるか、または逆転するので、2速の2ウェイローラクラッチ16Bを確実に係合解除することができる。上述したシフトダウンの制御による変速時間は300msec以内である。
ここで、入力軸7と出力軸8の間で伝達するトルクの方向を逆転させる方法としてシフトアップ時と同様の回転数制御を採用することも可能であるが、この実施形態に示すように、トルク制御で電動モータ3の出力トルクをゼロまたは負トルクにすることによって、入力軸7と出力軸8の間で伝達するトルクの方向を逆転させ、2速の2ウェイローラクラッチ16Bの係合を解除すると好ましい。このようにすると、2速の2ウェイローラクラッチ16Bを係合解除するときの入力軸7の減速を最小限に抑えることができ、その後のシンクロ動作が完了するまでに要する時間を効果的に抑えることが可能となる。
また、図17において、第2ステップによるシフトリング34の移動が開始(時刻t0)した直後に、2速の2ウェイローラクラッチ16Bの係合を解除するよう電動モータ3の出力を制御するように構成することも可能である。しかし、上記実施形態に示すように、シフトリング34の移動が開始(時刻t0)した後、1速シフト位置SP1fと2速シフト位置SP2fの間に予め設定されたモータ制御開始位置SP2tにシフトリング34が到達(時刻t1)するまでの間は、アクセルペダル63の操作量に応じたトルクを出力するよう電動モータ3の出力を制御するように構成すると好ましい。このようにすると、時刻t0~t1の間は入力軸7と出力軸8の間で伝達するトルクが維持されることから、トルク抜けの時間が短く済む。
上述した変速制御方法を採用すると、電動モータ3の現在の回転数と目標回転数との偏差に応じて電動モータ3の出力トルクの大きさを変化させる回転数制御でシンクロ動作を行なうので、現在の回転数と目標回転数の偏差が大きいときは、電動モータ3の出力トルクの大きさが大きくなり、その結果、変速段を切り替えるときの車速にかかわらず、シンクロ動作に要する時間を抑えることができる。また、シンクロ動作が完了した後は、電動モータ3の出力制御をトルク制御に切り替え、そのトルク制御で電動モータ3の出力トルクを徐々に立ち上げるので、次変速段の2ウェイローラクラッチに衝撃トルクが作用しにくく、変速ショックが生じにくい。
1 前輪
2 後輪
3 電動モータ
6 ディファレンシャルギヤ
7 入力軸
8 出力軸
9A 1速入力ギヤ
9B 2速入力ギヤ
10A 1速出力ギヤ
10B 2速出力ギヤ
15 軸受
16A 1速の2ウェイローラクラッチ
16B 2速の2ウェイローラクラッチ
17 円筒面
19 カム面
20 ローラ
21A 1速保持器
21B 2速保持器
22A 1速スイッチばね
22B 2速スイッチばね
33 変速アクチュエータ
34 シフトリング
35A 1速摩擦板
35B 2速摩擦板
39A 1速離反ばね
39B 2速離反ばね
41 シフト機構
SP1f 1速シフト位置
SP2f 2速シフト位置
A 車両用モータ駆動装置
EV 電気自動車
HV ハイブリッド自動車
S1 第1ステップ
S2 第2ステップ
S3 第3ステップ
S4 第4ステップ
S5 第5ステップ
SP1t モータ制御開始位置
2 後輪
3 電動モータ
6 ディファレンシャルギヤ
7 入力軸
8 出力軸
9A 1速入力ギヤ
9B 2速入力ギヤ
10A 1速出力ギヤ
10B 2速出力ギヤ
15 軸受
16A 1速の2ウェイローラクラッチ
16B 2速の2ウェイローラクラッチ
17 円筒面
19 カム面
20 ローラ
21A 1速保持器
21B 2速保持器
22A 1速スイッチばね
22B 2速スイッチばね
33 変速アクチュエータ
34 シフトリング
35A 1速摩擦板
35B 2速摩擦板
39A 1速離反ばね
39B 2速離反ばね
41 シフト機構
SP1f 1速シフト位置
SP2f 2速シフト位置
A 車両用モータ駆動装置
EV 電気自動車
HV ハイブリッド自動車
S1 第1ステップ
S2 第2ステップ
S3 第3ステップ
S4 第4ステップ
S5 第5ステップ
SP1t モータ制御開始位置
Claims (10)
- 電動モータ(3)と、
その電動モータ(3)の回転が入力される入力軸(7)と、
前記入力軸(7)に対して間隔をおいて平行に配置された出力軸(8)と、
前記入力軸(7)に設けられた第1入力ギヤ(9A)および第2入力ギヤ(9B)と、
前記出力軸(8)に設けられ、前記第1入力ギヤ(9A)および第2入力ギヤ(9B)にそれぞれ噛合する第1出力ギヤ(10A)および第2出力ギヤ(10B)と、
前記出力軸(8)の回転を左右の車輪に分配するディファレンシャルギヤ(6)とを有し、
前記第1入力ギヤ(9A)と第2入力ギヤ(9B)と入力軸(7)の組と、前記第1出力ギヤ(10A)と第2出力ギヤ(10B)と出力軸(8)の組とのうち一方を、第1クラッチギヤ(10A)と第2クラッチギヤ(10B)とこれらのクラッチギヤ(10A,10B)を軸受(15)を介して回転可能に支持するクラッチギヤ支持軸(8)とし、
前記第1クラッチギヤ(10A)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチ(16A)と、前記第2クラッチギヤ(10B)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチ(16B)と、前記第1の2ウェイローラクラッチ(16A)と第2の2ウェイローラクラッチ(16B)とを選択的に係合させる変速アクチュエータ(33)を設け、
前記第1の2ウェイローラクラッチ(16A)は、第1クラッチギヤ(10A)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第1保持器(21A)と、その第1保持器(21A)を前記中立位置に弾性保持する第1スイッチばね(22A)とからなり、
前記第2の2ウェイローラクラッチ(16B)は、第2クラッチギヤ(10B)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第2保持器(21B)と、その第2保持器(21B)を前記中立位置に弾性保持する第2スイッチばね(22B)とからなり、
前記変速アクチュエータ(33)は、前記第1保持器(21A)に対して回り止めされかつ前記第1クラッチギヤ(10A)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板(35A)と、その第1摩擦板(35A)を前記第1クラッチギヤ(10A)の側面から離反する方向に付勢する第1離反ばね(39A)と、前記第2保持器(21B)に対して回り止めされかつ前記第2クラッチギヤ(10B)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板(35B)と、その第2摩擦板(35B)を前記第2クラッチギヤ(10B)の側面から離反する方向に付勢する第2離反ばね(39B)と、前記第1摩擦板(35A)を押圧して前記第1クラッチギヤ(10A)の側面に接触させる第1シフト位置(SP1f)と前記第2摩擦板(35B)を押圧して前記第2クラッチギヤ(10B)の側面に接触させる第2シフト位置(SP2f)との間で軸方向に移動可能に設けられたシフトリング(34)と、そのシフトリング(34)を軸方向に移動させるシフト機構(41)とからなる車両用モータ駆動装置(A)の変速制御方法において、
前記第1の2ウェイローラクラッチ(16A)と第2の2ウェイローラクラッチ(16B)のうち現変速段の2ウェイローラクラッチ(16A)の係合を解除して次変速段の2ウェイローラクラッチ(16B)を係合させる変速指令を出す第1ステップ(S1)と、
この第1ステップ(S1)で前記変速指令が出たときに、前記シフト機構(41)を作動させることにより前記第1シフト位置(SP1f)と第2シフト位置(SP2f)のうち現変速段のシフト位置(SP1f)から次変速段のシフト位置(SP2f)に前記シフトリング(34)を移動させる第2ステップ(S2)と、
この第2ステップ(S2)によるシフトリング(34)の移動が開始した後、現変速段の2ウェイローラクラッチ(16A)の係合を解除するよう前記電動モータ(3)の出力を制御する第3ステップ(S3)と、
この第3ステップ(S3)で現変速段の2ウェイローラクラッチ(16A)の係合が解除された後、前記電動モータ(3)の現在の回転数と目標回転数との偏差に応じて電動モータ(3)の出力トルクの大きさを変化させる回転数制御により前記入力軸(7)の回転数を次変速段の変速比(r2)に対応する目標回転数に変化させる第4ステップ(S4)と、
この第4ステップ(S4)で前記入力軸(7)の回転数が次変速段の変速比(r2)に対応する目標回転数に変化した後、前記電動モータ(3)の出力制御を、前記回転数制御から前記電動モータ(3)の出力トルクを予め設定された目標トルクに制御するトルク制御に切り替え、そのトルク制御で電動モータ(3)の出力トルクを徐々に立ち上げる第5ステップ(S5)とを有することを特徴とする車両用モータ駆動装置の変速制御方法。 - 前記第3ステップ(S3)は、前記変速指令がシフトアップ指令のとき、前記回転数制御で電動モータ(3)の回転数を減速することによって、現変速段の2ウェイローラクラッチ(16A)の係合を解除する請求項1に記載の車両用モータ駆動装置の変速制御方法。
- 前記第3ステップ(S3)は、前記変速指令がシフトダウン指令のとき、前記トルク制御で電動モータ(3)の出力トルクをゼロまたは負トルクにすることによって、現変速段の2ウェイローラクラッチ(16B)の係合を解除する請求項1または2に記載の車両用モータ駆動装置の変速制御方法。
- 前記第4ステップ(S4)は、前記回転数制御を行なう間、予め設定された演算周期ごとに現在の車速に応じて目標回転数を更新する請求項1から3のいずれかに記載の車両用モータ駆動装置の変速制御方法。
- 前記第4ステップ(S4)は、現在の電動モータ(3)の回転数の目標回転数に対する偏差がゼロに収束するように電動モータ(3)の回転数を制御する請求項1から4のいずれかに記載の車両用モータ駆動装置の変速制御方法。
- 前記第4ステップ(S4)は、電動モータ(3)の現在の回転数の目標値に対する偏差がゼロに収束した後も、前記シフトリング(34)が次変速段のシフト位置(SP2f)に到達するまでの間は、電動モータ(3)の現在の回転数の目標回転数に対する偏差をゼロに維持するように電動モータ(3)の回転数を制御する請求項5に記載の車両用モータ駆動装置の変速制御方法。
- 前記第4ステップ(S4)の回転数制御が、比例動作に積分動作を加えたPI制御である請求項5または6に記載の車両用モータ駆動装置の変速制御方法。
- 前記第3ステップ(S3)は、前記第2ステップ(S2)によるシフトリング(34)の移動が開始した後、前記第1シフト位置(SP1f)と第2シフト位置(SP2f)の間に予め設定されたモータ制御開始位置(SP1t)にシフトリング(34)が到達するまでの間は、アクセルペダル(63)の操作量に応じたトルクを出力するよう前記電動モータ(3)の出力を制御し、前記モータ制御開始位置(SP1t)にシフトリング(34)が到達したときに、現変速段の2ウェイローラクラッチ(16A)の係合を解除するよう前記電動モータ(3)の出力を制御する請求項1から7のいずれかに記載の車両用モータ駆動装置の変速制御方法。
- 電気自動車(EV)の左右一対の前輪(1)と左右一対の後輪(2)のうち少なくとも一方を前記車両用モータ駆動装置(A)で駆動し、その車両用モータ駆動装置(A)を請求項1から8のいずれかに記載の変速制御方法で制御する電気自動車の変速制御方法。
- ハイブリッド自動車(HV)の左右一対の前輪(1)と左右一対の後輪(2)のうち一方をエンジン(E)で駆動し、他方を前記車両用モータ駆動装置(A)で駆動し、その車両用モータ駆動装置(A)を請求項1から8のいずれかに記載の変速制御方法で制御するハイブリッド自動車の変速制御方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011123433A JP2012253873A (ja) | 2011-06-01 | 2011-06-01 | 車両用モータ駆動装置の変速制御方法および自動車の変速制御方法 |
| JP2011-123433 | 2011-06-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2012165146A1 true WO2012165146A1 (ja) | 2012-12-06 |
Family
ID=47259009
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2012/062490 WO2012165146A1 (ja) | 2011-06-01 | 2012-05-16 | 車両用モータ駆動装置の変速制御方法および自動車の変速制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2012253873A (ja) |
| WO (1) | WO2012165146A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130296129A1 (en) * | 2011-01-07 | 2013-11-07 | Yoshinori Itakura | Motor drive assembly for a vehicle and a motor vehicle |
| CN107269776A (zh) * | 2016-04-08 | 2017-10-20 | 江苏兴云新能源有限公司 | 一种双离合变档机构 |
| CN114593202A (zh) * | 2022-03-30 | 2022-06-07 | 广汽埃安新能源汽车有限公司 | 一种基于双电机构型的车辆换挡控制方法及系统 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105034853B (zh) * | 2015-07-31 | 2017-07-11 | 深圳巴斯巴科技发展有限公司 | 一种减小电动汽车定速巡航速度波动的控制系统及方法 |
| CN106195192B (zh) * | 2016-09-29 | 2020-03-17 | 重庆实强机器制造厂 | 一种电动汽车及其两档变速箱 |
| CN106545624B (zh) * | 2017-01-09 | 2018-08-10 | 山东理工大学 | 电动汽车线控二档自动变速器 |
| JP6865611B2 (ja) * | 2017-03-28 | 2021-04-28 | クノールブレムゼ商用車システムジャパン株式会社 | 変速制御装置及び変速制御方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000006690A (ja) * | 1998-06-22 | 2000-01-11 | Toyota Motor Corp | 車両用変速制御装置 |
| JP2003254427A (ja) * | 2002-03-04 | 2003-09-10 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2006112248A (ja) * | 2004-10-12 | 2006-04-27 | Nissan Motor Co Ltd | エンジンの制御装置 |
| JP2010265951A (ja) * | 2009-05-13 | 2010-11-25 | Nissan Motor Co Ltd | 電動車両の変速制御装置 |
| JP2011057030A (ja) * | 2009-09-08 | 2011-03-24 | Ntn Corp | 車両用モータ駆動装置および自動車 |
-
2011
- 2011-06-01 JP JP2011123433A patent/JP2012253873A/ja not_active Withdrawn
-
2012
- 2012-05-16 WO PCT/JP2012/062490 patent/WO2012165146A1/ja active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000006690A (ja) * | 1998-06-22 | 2000-01-11 | Toyota Motor Corp | 車両用変速制御装置 |
| JP2003254427A (ja) * | 2002-03-04 | 2003-09-10 | Toyota Motor Corp | 自動変速機の制御装置 |
| JP2006112248A (ja) * | 2004-10-12 | 2006-04-27 | Nissan Motor Co Ltd | エンジンの制御装置 |
| JP2010265951A (ja) * | 2009-05-13 | 2010-11-25 | Nissan Motor Co Ltd | 電動車両の変速制御装置 |
| JP2011057030A (ja) * | 2009-09-08 | 2011-03-24 | Ntn Corp | 車両用モータ駆動装置および自動車 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20130296129A1 (en) * | 2011-01-07 | 2013-11-07 | Yoshinori Itakura | Motor drive assembly for a vehicle and a motor vehicle |
| US9033851B2 (en) * | 2011-01-07 | 2015-05-19 | Ntn Corporation | Motor drive assembly for a vehicle and a motor vehicle |
| CN107269776A (zh) * | 2016-04-08 | 2017-10-20 | 江苏兴云新能源有限公司 | 一种双离合变档机构 |
| CN114593202A (zh) * | 2022-03-30 | 2022-06-07 | 广汽埃安新能源汽车有限公司 | 一种基于双电机构型的车辆换挡控制方法及系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012253873A (ja) | 2012-12-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5580217B2 (ja) | 車両用モータ駆動装置および自動車 | |
| WO2012165146A1 (ja) | 車両用モータ駆動装置の変速制御方法および自動車の変速制御方法 | |
| WO2011030670A1 (ja) | 車両用モータ駆動装置および自動車 | |
| EP2272729B1 (en) | Hybrid power apparatus | |
| EP2897827B1 (en) | Hybrid vehicle including a control device | |
| JP5822615B2 (ja) | 自動クラッチ制御装置およびその変速制御方法 | |
| JP5465614B2 (ja) | 車両用モータ駆動装置および自動車 | |
| JP5863333B2 (ja) | 自動クラッチ制御装置 | |
| WO2012137812A1 (ja) | 車両用モータ駆動装置および自動車 | |
| JP2015007459A (ja) | 電気自動車の変速制御装置 | |
| JP5387967B2 (ja) | 車両用モータ駆動装置および自動車 | |
| JP5863379B2 (ja) | デュアルクラッチ式自動変速機およびその変速制御方法 | |
| JP2013152001A (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| WO2013176074A1 (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| JP2014121225A (ja) | 電気自動車の変速制御装置および変速制御方法 | |
| JP2014045561A (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| JP2014001746A (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| WO2013081121A1 (ja) | 電動モータ搭載自動車のアクセル操作応答制御方法 | |
| JP2014047817A (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| JPWO2007072539A1 (ja) | 車両の原動機始動装置および始動方法 | |
| JP2014023415A (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| WO2013183482A1 (ja) | 電気自動車の変速制御方法および変速制御装置 | |
| JP2014236554A (ja) | 車両用モータ駆動装置 | |
| JP2013032825A (ja) | 車両の動力伝達制御装置 | |
| JP2013153618A (ja) | 電気自動車の制御方法および制御システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12793047 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 12793047 Country of ref document: EP Kind code of ref document: A1 |