以下、本発明を実施するための形態について図面を用いて説明する。
〈第1の実施形態〉
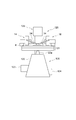
図1は第1の実施形態によるマニピュレータシステムの構成を概略的に示す図である。図1において、マニピュレータシステム10は、顕微鏡観察下で試料に人工操作を実施するためのシステムとして、顕微鏡ユニット12と、マニピュレータ14と、マニピュレータ16とを備えており、顕微鏡ユニット12の両側にマニピュレータ14、16が分かれて配置されている。
顕微鏡ユニット12は、撮像素子としてのカメラ18、顕微鏡20、試料台としてのベース22を備えている。このベース22の直上に顕微鏡20が配置される構造となっている。なお、顕微鏡20とカメラ18とは一体構造となっており、図示は省略したが、ベース22に向けて光を照射する光源を備えている。
ベース22上には試料(図示せず)が載せられるようになっている。この状態で、ベース22上の試料に顕微鏡20から光が照射され、ベース22上の細胞で反射した光が顕微鏡20に入射すると、細胞に関する光学像は、顕微鏡20で拡大されたあとカメラ18で撮像されるようになっており、カメラ18の撮像による画像を基に試料を観察することができる。
マニピュレータ14は、図1に示すように、X軸‐Y軸‐Z軸の3軸構成のマニピュレータとして、ピペット24、X‐Y軸テーブル26、Z軸テーブル28、X‐Y軸テーブル26を駆動する駆動装置30、Z軸テーブルを駆動する駆動装置32を備えて構成されている。ピペット24の先端には、毛細管チップであるキャピラリ25が取り付けられている。
ピペット24は、Z軸テーブル28に連結され、Z軸テーブル28は、X‐Y軸テーブル26上に上下動自在に配置され、駆動装置30、32はコントローラ43に接続されている。なお、コントローラ43は、パーソナルコンピュータ(パソコン、PC)から構成されてよい。
X‐Y軸テーブル26は、駆動装置30の駆動により、X軸またはY軸に沿って移動するように構成され、Z軸テーブル28は、駆動装置32の駆動により、Z軸に沿って(鉛直軸方向に沿って)移動するように構成されている。Z軸テーブル28に連結されたピペット24は、X‐Y軸テーブル26とZ軸テーブル28の移動にしたがって3次元空間を移動領域として移動し、ベース22上の細胞などを保持するように構成されている。
マニピュレータ16は、直交3軸構成のマニピュレータとして、ピペット(インジェクションピペット)34と、X‐Y軸テーブル36と、Z軸テーブル38と、X‐Y軸テーブル36を駆動する駆動装置40と、Z軸テーブル38を駆動する駆動装置42を備え、ピペット34は、Z軸テーブル38に連結され、Z軸テーブル38は、X‐Y軸テーブル36上に上下動自在に配置され、駆動装置40、42は、コントローラ43に接続されている。ピペット34の先端にはキャピラリ(ガラスキャピラリ)35が取り付けられている。
X‐Y軸テーブル36は、駆動装置40の駆動により、X軸またはY軸に沿って移動するように構成され、Z軸テーブル38は、駆動装置42の駆動により、Z軸に沿って(鉛直軸方向に沿って)移動するように構成されている。Z軸テーブル38に連結されたピペット34は、X‐Y軸テーブル36とZ軸テーブル38の移動にしたがって3次元空間を移動領域として移動し、ベース22上の試料に人工操作を行うように構成されている。このように、マニピュレータ14、16はほぼ同一構成であり、以下、ピペット34が連結されたマニピュレータ16を例に挙げて説明する。
X‐Y軸テーブル36は、駆動装置40の駆動(モータ)により、X軸またはY軸に沿って移動するように構成され、Z軸テーブル38は、駆動装置42の駆動(モータ)により、Z軸に沿って(鉛直軸方向に沿って)移動するように構成されているとともに、ベース22上の細胞などを、針を挿入するための挿入対象とするピペット34を連結している。
すなわち、X‐Y軸テーブル36とZ軸テーブル38は、駆動装置40、42の駆動により、ベース22上の細胞などを含む3次元空間を移動領域として移動し、ピペット34を、例えば、ピペット34の先端側からベース22上の細胞(試料)に対して、針を挿入するための挿入位置まで粗動駆動する粗動機構(3次元軸移動テーブル)として構成されている。
また、Z軸テーブル38とピペット34との連結部は、ナノポジショナとしての機能を備えている。ナノポジショナは、ピペット34を設置している方向へ自在に移動可能に支持するとともに、さらに、ピペット34をその長手方向(軸線方向)に沿って微動駆動するように構成されている。
具体的には、Z軸テーブル38とピペット34との連結部には、ナノポジショナとして、微動機構44を備えている。
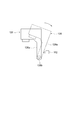
微動機構44は、図2乃至図4に示すように、圧電アクチュエータの本体を構成するハウジング48を備えており、ほぼ筒状に形成されたハウジング48内には、ピペット34を駆動対象として、外周側にねじ部を有するねじ軸52と、ねじ軸52を囲む中空状の回転軸54が挿通されている。ハウジング48はその底部がベース56に固定されている。
ねじ軸52の先端側には、治具58を介してピペット34の根元側が連結されており、ねじ軸52の中程には、ねじ軸52外周のねじ部とねじ結合されるねじ要素としてのボールねじナット(BSナット)60が装着され、治具58とねじ軸52との間にはスライダ62Aが連結されている。スライダ62Aはベース56とほぼ直交する方向に配置され、切り欠き64を間にしてリニアガイド66に連結されている。リニアガイド66はベース56底部側に配置され、ベアリング68を介して、ねじ軸52の軸方向に沿って移動自在にベース56に連結されている。
すなわち、リニアガイド66は、ねじ軸52の軸方向の移動に合わせて、ねじ軸52の先端側を支持したスライダ62Aを、ベース56に沿って往復動させるようになっている。この際、ねじ軸52のうちボールねじナット60よりもピペット34側の部位が、スライダ62Aを介してリニアガイド66でスライド自在に支持されるので、ねじ軸52の直線運動をピペット34へ伝達することができる。
ボールねじナット60は、回転軸54の軸方向一端側(先端側)の段部54aに固定されているとともに、ねじ軸52外周のねじ部とねじ結合され、ねじ軸52がその軸方向に沿って往復動(直線運動)するのを自在に支持するようになっている。すなわち、ボールねじナット60は、回転軸54の回転運動をねじ軸52の直線運動に変換するための要素として構成されている。
回転軸54の軸方向他端側は、中空モータ70内の回転部に連結している。中空モータ70のハウジング74は、その底部側がベース56に弾性体としてのゴムワッシャ76を介してボルト78が固定されている。中空モータ70が駆動されると回転軸54が回転し、回転軸54の回転運動がボールねじナット60を介してねじ軸52に伝達され、ねじ軸52がその軸方向に沿って直線運動するようになっている。なお、モータ70と回転軸54との連結にカップリングを使用してもよい。
一方、回転軸54の段部54aに隣接して、軸受80、82が内輪間座84を間にして収納されている。軸受80、82は、それぞれ内輪80a、82aと、外輪80b、82bと、内輪と外輪間に挿入されたボール80c、82cを備え、各内輪80a、82aが回転軸54の外周面に嵌合され、各外輪80b、82bがハウジング48の内周面に嵌合され、回転軸54を回転自在に支持するようになっている。軸受80、82は、内輪間座84を間にし、回転軸54にロックナット86により固定されている。軸受80は、ハウジング48内の段部54aと円環状のスペーサ90と当接することにより、回転軸54の軸方向への移動が規制されるようになっている。軸受82の外輪82bとハウジング48の蓋88との間に、円環状の圧電素子92と円環状のスペーサ90が配置されている。
また、各軸受80、82、圧電素子92は、スペーサ90の長さを調節し、蓋88を閉めることにより、予圧が付与される。
具体的には、スペーサ90の長さを調整し、蓋88を閉めると、その位置に応じた締結力が軸受82と軸受80の外輪82b、80bに、軸方向に沿った押圧力として予圧が付与されるとともに、同時に圧電素子92にも予圧が付与される。これにより、軸受80、82および圧電素子92に所定の予圧が付与され、軸受80、82の外輪間に軸方向間の距離としての間隙94が形成される。
圧電素子92は、リード線(図示せず)を介して制御回路としてのコントローラ43に接続されており、コントローラ43からの電圧に応じて回転軸54の長手方向(軸方向)に沿って伸縮する圧電アクチュエータの一要素として構成されている。すなわち、圧電素子92は、コントローラ43からの印加電圧に応答して、回転軸54の軸方向に沿って伸縮し、回転軸54をその軸方向に沿って微動させるようになっている。回転軸54が軸方向に沿って微動すると、この微動がねじ軸52を介してピペット34に伝達され、ピペット34の位置が微調整されることになる。
上記構成において、インジェクション用マニピュレータ16を駆動するに際しては、XY軸テーブル36とZ軸テーブル38を粗動駆動して、インジェクションピペット34をベース22上の細胞に近づけて位置決めしたあと、微動機構44を用いてピペット34を微動駆動することとしている。
具体的には、ピペット34にキャピラリ35として、ガラスキャピラリをセッティングするに際しては、図5に示すように、顕微鏡作業箇所に配置されたベース22からピペット34を退避させる状態になるように、マニピュレータ14,16を駆動する。これにより、ピペット34にガラスキャピラリ35をセッティングする際、十分な作業スペースが得られる。
ガラスキャピラリ35をピペット34に取り付けた後は、コントローラ43からの指令により、マニピュレータ14、16を駆動し、図6に示すように、ガラスキャピラリ35が取り付けられたピペット34を顕微鏡作業箇所であるベース22上へ移動させる。このときの作業方法はジョイスティック47やボタン43Bやマウス49(図7)を用いたりする方法を用いることもできる。
ガラスキャピラリ35を顕微鏡作業箇所に移動させる際、1回目(初めての)の操作の場合、顕微鏡視野倍率を低倍にし、アクチュエータを駆動することで、顕微鏡20の視野内にガラスキャピラリ35が確認でき次第、アクチュエータの駆動を停止する。
このあと、コントローラ43の画像処理を利用し、アクチュエータを駆動することで、顕微鏡20の視野内に、ガラスキャピラリ35を最適位置へ移動し、アクチュエータの駆動を停止する。このとき、1回目の操作の際に駆動したアクチュエータの移動量をコントローラ43に記憶する。このとき、移動量あるいは移動した位置を所定の基準位置からのX,Y,Z座標として記憶しておいても良い。またこのとき必要であれば、XYZの駆動系も駆動しても良い。また、併せて、顕微鏡20の対物レンズが合焦している状態の対物レンズ位置を所定の基準位置からの座標として記憶しておいても良い。
次に、マニピュレータ16を操作し、シャーレの交換あるいはガラスキャピラリ35の交換が必要になった場合、アクチュエータを駆動し、顕微鏡作業箇所からガラスキャピラリ35を退避させるための操作を行う。このときボタン43Bの操作により、ガラスキャピラリ35をセッティングした位置、あるいは、コントローラ43に記憶された所定の基準位置まで駆動しても良いし、ジョイスティック47などを用いて任意の位置まで退避するようにしてもよい。
一方、再度、顕微鏡作業箇所へガラスキャピラリ35を移動する場合、1回目にセッティングした際の位置をコントローラ43が記憶しているため、マニピュレータ16で、容易にガラスキャピラリ35の位置を調整することが可能になる。
また一連の細胞操作作業中にガラスキャピラリ35を交換する必要があった場合でも、ピペット34をマニピュレータ16から外すことなく、ガラスキャピラリ35をセッティングすることが可能となるので、作業効率を向上することができる。
ガラスキャピラリ35として、その形状が均一なものを使用する場合は、本発明に係るマニピュレータ16を用いることで、従来のものよりも効率を向上させることができる。
またガラスキャピラリ35の形状にばらつきがある場合でもピペット34をアクチュエータ(ねじ軸52)の駆動によって直線往復運動させることができるため、ガラスキャピラリ35の位置を微細に調整することができる。
また、ガラスキャピラリ35が細胞の挿入位置に位置決めされたときには、圧電素子92にインジェクション用の電圧を印加し、微動機構44を微動駆動することで、ピペット34によるインジェクション動作を行うことができる。この際、圧電素子92からピペット34を支持する治具58までの間には弱いばね要素を配置しておらず、高剛性のばね要素である軸受を用いているため、高い応答性を得ることが可能である。
圧電素子92に印加する電圧の電圧波形としては、正弦波、矩形波、三角波などを用いることができる。また圧電素子92に電圧を印加する方法としては、操作者がボタン43Bを押している間、信号波形を連続して出力して駆動しても良いし、バースト波形を使用しても良い。
本実施形態においては、軸受80、82のうち軸受80の内輪80aと外輪80bの変位量であって、圧電素子92の変位の半分の変位量がピペット34の変位量に設定されているため、圧電素子92には微動変位量の2倍の変位を与えるための制御電圧と初期設定電圧とを加算した微動用電圧を印加することになる。
例えば、圧電素子92に2xの伸びが生じたときには、この伸びによる押圧力は微動制御を行う前の予圧荷重に加えて軸受82の外輪82bを押圧し、軸受80の外輪80bを軸方向に移動させ、軸受80、82の各外輪間の間隙94が2x分更に狭くなって圧電素子92の軸方向の伸びを吸収する。
この間隙94の変位は、弾性変形に伴って軸受80、82がそれぞれ軸方向にxずつ変位し、軸受80の外輪80bが軸方向に合わせて2x変位することにより生じる。
逆に、圧電素子92が2x縮むと、押圧力が減少し、軸受80、82の弾性変形がそれぞれxずつ減少し、間隙94が広がる方向に、軸受80の外輪80bが軸方向に合わせて2x変位することになり、圧電素子92の縮む分を吸収する。
このように、間隙94の変位xを軸受80、82がxずつ分けて吸収するので、軸受80、82を互いに押圧する力がバランスしたときに、軸受80、82の内輪80a、80bが回転軸54と共に軸方向にx変位する。これにより、回転軸54にねじ軸52を介して連結されたピペット34が軸方向にxだけ変位する。つまり、圧電素子92の2xの半分の変位量がピペット34の微動変位量となってピペット34が挿入位置に挿入される。ピペット34が挿入位置に位置決めされたあと、圧電素子92にインジェクション用電圧を印加すると、ピペット34がインジェクション動作を行うことになる。
本実施形態によれば、中空モータ70の駆動に伴う回転軸54の回転運動をボールねじナット60を介して直線運動に変換してねじ軸52に伝達し、中空モータ70の粗動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って粗動駆動し、微動機構44の微動駆動に伴うねじ軸52の直線運動によってピペット34をその軸方向に沿って微動駆動させるようにしたため、ピペット34にガラスキャピラリ35を取り付けるだけで、ピペット34を直線運動させることができ、顕微鏡作業箇所に配置されたベース22へ向けてピペット34を移動させたり、ベース22からピペット34を退避させたりする際に、煩雑な作業を不要とすることができる。また、コントローラ43にセッティング位置情報等を記憶させておき、それに基づいて位置決めを自動で行うこともできるので、より効率的な作業とすることができる。
次に、図1のマニピュレータシステム10のパーソナルコンピュータ(コントローラ)43による制御について図7を参照して説明する。図7は図1のパーソナルコンピュータ(コントローラ)43による制御系要部を示すブロック図である。
図1,図7のパーソナルコンピュータ43は、演算手段としてのCPU(中央演算処理装置)及び記憶手段としてのハードディスク、RAM、ROMなどのハードウエア資源を備え、所定のプログラムに基づいて各種の演算を行い、演算結果に従って制御部46Aが各種の制御を行うように駆動指令を出力する。すなわち、制御部46Aは、図1の顕微鏡ユニット12の焦点合わせ機構81,マニピュレータ14の駆動装置30,32,シリンジポンプ29、及び、マニピュレータ16の駆動装置40,42,注入ポンプ39,微動機構44の圧電素子92を制御し、必要に応じて設けられたドライバやアンプ等を介してそれぞれに駆動指令を出力する。
また、パーソナルコンピュータ43には、情報入力手段としてキーボードの他にジョイスティック47,マウス49,ボタン43B(図1)が接続されており、さらに、CRTや液晶パネルからなる表示部45が接続され、表示部45にはカメラ18で取得した顕微鏡画像や各種制御用画面が表示されるようになっている。
また、制御部46Aは、マニピュレータ14,16を所定のシーケンスで自動的に駆動するようになっている。かかるシーケンス駆動は、所定のプログラムによるCPUの演算結果に基づいて制御部46Aが順次、それぞれに駆動指令を出力することで行われ、例えば、ベース22上で多数の卵を操作する場合、マニピュレータ14,16が操作済みの卵と操作前の卵との区別のための操作を行うようになっている。
また、パーソナルコンピュータ43は、顕微鏡20を通してカメラ18で撮像した顕微鏡視野の画像信号が入力する画像入力部82Bと、画像入力部82Bからの画像信号について画像処理を行う画像処理部83と、画像処理前後の画像情報が表示部45へと出力する画像出力部84Aと、カメラ18で撮像された操作対象物の卵の核等の位置やホールディングキャピラリ25とインジェクションキャピラリ35との位置等を画像処理後の画像情報に基づいて検出するための位置検出部85と、を備え、各部82~85が制御部46Aにより制御されるようになっている。
画像処理部83は、例えば、検出対象物の位置を検出するためにエッジ抽出処理やパターンマッチングを行い、その処理結果に基づいて位置検出部85が卵の核やキャピラリ25,35の位置を検出し、それらの検出位置、あるいはそれらの検出位置情報と、あらかじめ設定もしくは作業中に設定された位置情報に基づいてキャピラリ25,35等の駆動が制御される。
また、表示部45には、カメラ18で撮像したキャピラリ25,35の画像を含めて卵等の微小な操作対象物の顕微鏡画像や演算結果に関する情報などが表示される。
図1,図7の顕微鏡ユニット12,マニピュレータ14,16の各動作は、ジョイスティック47の操作による入力情報に基づいて図7の制御部46Aにより制御される。本実施形態では、ジョイスティック47はホールディング用マニピュレータ14及びインジェクション用マニピュレータ16に対しそれぞれ1つずつ用意される。図8に図1,図7のジョイスティックの具体例を示す斜視図を示す。なお、1つのジョイスティックで顕微鏡ユニット12、マニピュレータ14,16の操作を行っても良いし、3本以上のジョイスティックで操作をするものであっても良い。
図8のように、ジョイスティック47は、基台から直立し操作者により掴まれて右側R,左側Lに傾斜するように、また、ねじるように操作可能な本体部(ハンドル)47eと、その上部に並んで配置された第1,第2及び第3押しボタンスイッチ47a,47b,47cと、さらにその上部に配置された4方向や8方向等の多方向ハットスイッチ47dと、押しボタンスイッチ47a~47cの反対側に配置されたトリガスイッチ47gと、を備えている。
図1,図7のジョイスティック47の押しボタンスイッチ47a~47c,多方向ハットスイッチ47d,本体部47e,トリガスイッチ47gには、それぞれ、顕微鏡ユニット12の焦点合わせ機構81、各マニピュレータ14,16のXYZ軸、シリンジポンプ29,注入ポンプ39,圧電素子92の各駆動の操作機能が割り当てられている。例えば、トリガスイッチ47gを引きながら本体部47eを右側R,左側Lに傾斜させることでマニピュレータ14,16のXY駆動を行うことができ、本体部47eをねじることでZ駆動を行うことができる。
また、ホールディング用マニピュレータ14に関しては、多方向ハットスイッチ47dの上方向、下方向ボタンを押すと、焦点合わせ機構81が駆動し、顕微鏡20の焦点合わせができ、右方向、左方向ボタンを押すと、卵等の操作対象物に対するXY平面回転、YZ平面回転を行うことができ、また、押しボタンスイッチ47b,47cはシリンジ調整のためのものであり、押しボタンスイッチ47b,47cの1つを押すと、シリンジポンプ29によるホールディングキャピラリ25の吸引圧(陰圧)を調節できる。また、例えば、押しボタンスイッチ47aを用いて、マニピュレータ14,16に対し自動でシーケンス駆動を行わせることができる。また、コントローラ43は、顕微鏡20の焦点合わせに関連する各部位の位置情報を移動量あるいは座標等として記憶しておくこともできる。
また、インジェクション用マニピュレータ16に関しては、多方向ハットスイッチ47dを用いてモータ駆動によるXY平面における微動を制御でき、押しボタンスイッチ47b,47cはシリンジ調整のためのものであり、押しボタンスイッチ47aは穿孔駆動のオン・オフ制御のためのものである。
図8のジョイスティック47における上記スイッチの操作により、図1,図7のマニピュレータ14が駆動され、そのホールディングキャピラリ25がベース22上の卵等を保持し、また、その保持の吸引圧(陰圧)が制御される。
また、ジョイスティック47における上記スイッチの操作により、マニピュレータ16が駆動され、そのインジェクションキャピラリ35の先端がインジェクション方向に直線的に変位し、卵に挿入されたインジェクションキャピラリ35から所定の溶液が注入ポンプ39の駆動により卵に対しインジェクションされ、さらに必要であれば、そのキャピラリ35の駆動の間または駆動の後に、穿孔用電圧が圧電素子92に印加され、圧電素子92が駆動され、インジェクションキャピラリ35が卵に接近または当接した位置で微小量の移動を行うことで卵に対する穿孔動作を行い、挿入されたインジェクションキャピラリ35から所定の溶液が注入ポンプ39の駆動により卵に注入(インジェクション)される。その後、インジェクションキャピラリ35を卵内の位置から抜くように駆動する。
次に、図1~図8のマニピュレータシステム10による動作について図9,図10をさらに参照して説明する。
図9は、図1の顕微鏡ユニット12による顕微鏡視野を模式的に示す図であり、キャピラリ25,35の各先端位置及び操作対象物の卵を示し、操作対象物の卵に対する交換等の各操作ステップ(a)乃至(e)を説明するための図である。図10は、同じく、キャピラリ25,35の各先端位置及び操作対象物の卵を示し、操作対象物の卵に対する位置決め等の各操作ステップ(a)乃至(e)を説明するための図である。
例えば、図1のベース22上で多数の卵に対するDNAマイクロインジェクションを行うとき、インジェクション操作済み卵を未操作卵と区別しながら移動させ、未操作卵を新たにセッティングするようにして卵を次々と交換することが必要であるが、かかる卵交換ステップがマニピュレータシステム10によるシーケンス駆動で次のようにして自動的に実行される。
図9(a)は、インジェクションキャピラリ35を通してのインジェクション操作の終了した操作済卵D1がホールディングキャピラリ25に所定の陰圧で保持されており、インジェクションキャピラリ35が操作済卵D1から抜かれた状態を示す。この状態で図8のジョイスティック47のトリガスイッチ47gをオンにすると、次のようにマニピュレータ14,16がシーケンス駆動される。
すなわち、図9(a)に示す現状のインジェクションキャピラリ35とホールディングキャピラリ25との位置関係を制御部46Aが図7の位置検出部85の検出結果に基づいて認識する。
次に、図9(b)のように、インジェクション用マニピュレータ16を駆動してインジェクションキャピラリ35を図の破線位置から実線の所定位置へ移動させる。この所定位置は、例えば、インジェクションキャピラリ35の先端35aがホールディングキャピラリ25の先端で図の下方近傍とし、インジェクションキャピラリ35が未操作卵D2と操作済卵D1との間に位置させることで、未操作卵D2と操作済卵D1とが区別される。
次に、図9(c)のように、図9(b)の移動動作の実行中または後、図7のシリンジポンプ29を制御し、ホールディングキャピラリ25の陰圧の圧力状態を予め設定した分だけ陽圧にして陰圧を弱めて卵に対するホールド力を緩める。この操作は、卵を完全にリリースするような圧力状態ではなく、軽くホールドする程度の圧力状態にすることが望ましい。
次に、図9(d)のように、インジェクション用マニピュレータ16を駆動してインジェクションキャピラリ35を図の上方に図の破線位置から実線位置へ移動させる。このとき、緩くホールドされた操作済卵D1もホールディングキャピラリ25から離れ、インジェクションキャピラリ35の移動とともに図の破線位置から実線位置へ移動する。
そして、図9(e)のように、ホールディングキャピラリ25の圧力状態は弱い陰圧であるため、図の下方にある次に操作する未操作卵D2が自動的に図の破線位置から実線位置へと移動しホールディングキャピラリ25により保持される。このとき、インジェクションキャピラリ35が操作済卵D1と未操作卵D2との間に位置し、操作済卵D1と未操作卵D2とが混在しないように仕切り機能を発揮するため、これら卵が混在することを防ぐことができる。
上述のようにして、インジェクションキャピラリ35によるインジェクション操作が終了した操作済卵D1をホールディングキャピラリ25から離して移動させて次の未操作卵D2をホールディングキャピラリ25に保持させてセッティングすることができ、操作済卵と未操作卵との交換を自動的に実行できる。しかも、操作済卵D1はインジェクションキャピラリ35により仕切られて未操作卵D2と混在することを防止できる。
次に、図10(a)のように、インジェクション用マニピュレータ16を駆動してインジェクションキャピラリ35を所定位置へ移動させる。この所定位置は、例えば、未操作卵D2の時計4~5時方向の下方近傍である。この状態で、未操作卵D2の核dが所定位置に表示部45の顕微鏡画像で確認できれば、シリンジポンプ29を制御してホールディングキャピラリ25によるホールド力を強め、未操作卵D2を確実にホールドする。
上述の未操作卵D2の確実なホールドのとき、インジェクションしたい核dは顕微鏡画像で時計3時方向に確認できることが望ましい。すなわち、核dの所定位置は時計3時方向である。この理由として、インジェクションする場所を時計3時方向にセッティングすることでホールディングとインジェクションとの軸が一致し、作業者がインジェクションし易いためである。さらに、例えば、未操作卵D2の核dが9時方向に位置した場合、インジェクションのときにインジェクションキャピラリ35がホールディングキャピラリ25に接触し折損する可能性があるため、3時方向にセッティングすることが好ましい。
また、図10(b)のように、未操作卵D2において核dが所定位置(時計3時方向)に確認できない場合は、制御部46Aが自動的にインジェクションキャピラリ35を制御して未操作卵D2を図のYZ平面で第1回転パターンまたはXY平面で第2回転パターンで回転させる。このとき、ホールディングキャピラリ25による陰圧は弱いままであり、回転操作はインジェクションキャピラリ35で未操作卵D2を第1回転パターンではじくような動作や第2回転パターンで突っつく動作をすることで行い、未操作卵D2をどのような方向で回転させるかはカメラ18からの画像情報に対し制御部46Aが位置検出部85による核dの検出結果に基づいて判別し、所定位置に核dが確認できるまで継続して動作する。このとき、回転操作ごとに顕微鏡ユニット12の焦点合わせ機構81をジョイスティック47の所定スイッチで操作し、未操作卵D2の核dの位置を表示部45で確認しながら焦点合わせ機構81を駆動する。
上述のようにして、図10(c)のように、未操作卵D2の核dを所定位置に位置決めした後、核dとインジェクションキャピラリ35との焦点が一致するように、インジェクションキャピラリ35が取付けられたインジェクション用マニピュレータ16のZ軸を駆動し上下動させて、画像情報を判定値とした焦点合わせをすることにより、インジェクションキャピラリ35をZ軸方向の位置にセッテイングする。また、未操作卵D2の核dの所定位置への設定後、シリンジポンプ29を制御してホールディングキャピラリ25によるホールド力を強め、未操作卵D2を確実にホールドする。
次に、図10(d)のように、インジェクション用マニピュレータ16のXY軸を駆動し、マニピュレータ16をXY平面で図の破線位置から実線位置へ移動させることで、インジェクションキャピラリ35をXY軸方向の位置にセッティングする。
上述のようにしてインジェクションキャピラリ35のインジェクション操作可能な位置へのセッティングが完了すると、操作者は、未操作卵D2の核dの位置を表示部45で見ながら、図8のジョイスティック47のスイッチを操作することで、図10(e)のように、インジェクション用マニピュレータ16を駆動して未操作卵D2にインジェクションキャピラリ35を挿入して注入ポンプ39を駆動することでインジェクション操作を行う。
上述のインジェクション操作が終了すると、インジェクション用マニピュレータ16を駆動してインジェクションキャピラリ35を卵から抜くことで、上述の図9(a)の状態になる。
以上のようにして、未操作卵D2をホールディングキャピラリ25にセッティングした後(図9(e))、未操作卵D2の核dの位置を確認し、必要な場合は核dの位置を調整してから、インジェクションキャピラリ35をインジェクション操作可能な位置へセッティングすることを自動でシーケンス駆動で行うことができる。
以上のように、本実施の形態によれば、図9(a)~(e)及び図10(a)~(e)の各操作をシーケンス駆動により自動で実行できることで、操作者は複雑な操作をすることなしに卵及びインジェクションキャピラリ35のセッティングが可能となり、操作者に対する負担が軽減され、熟練技術者以外の操作者でも巧みな操作をせずにマニピュレータシステムを使用することが可能となる。
なお、図9(a)~(e)及び図10(a)~(e)での各操作は、DNAマイクロインジェクション以外に、卵へ精子を注入する作業の際にも操作者が作業し易いようにセッティングでき、この場合にも有効な操作方法である。
従来、遺伝子組み換え操作や顕微受精操作のとき、細胞や卵等の操作対象物を操作する前後に所定の位置にセッティングする操作は、マニピュレータの基本操作に慣れた熟練技術が必要であったが、本実施の形態のマニピュレータシステムによれば、かかる操作が容易に行うことができるように電動マニピュレータをシーケンス駆動し、熟練技術がなくても操作処理が可能であるとともに、従来手動で操作した同じ動作を自動的に操作するため、操作者が違和感なく効率よく作業できる。
〈第2の実施形態〉
図11~図18を参照して第2の実施形態によるマニピュレータシステムについて説明する。本実施形態によるマニピュレータシステムは、図1~図8のマニピュレータシステムと基本的に同様の構成であり、図9,図10と同様にしてジョイスティックのボタンを押すことで自動的に細胞・卵の交換作業を行うことが可能なものであるが、テンプレート画像を利用して自動化効率を向上させたものである。
図11は第2の実施形態を説明するために図7の表示部45に表示された顕微鏡画像及び制御画面の例を示す図である。図12は図11の顕微鏡画像においてテンプレート画像の選択を行う例を示す図11と同様の図である。図13は図12で選択したテンプレート画像の記憶を行う例を示す図11と同様の図である。図14は作成されたテンプレート画像の例を示す図11と同様の図である。図15は顕微鏡画像において位置関係等の演算の例を説明するための図である。
図16は第2の実施形態のマニピュレータシステムでテンプレート画像を作成するステップを説明するためのフローチャートである。図17は図16のテンプレート画像作成後のステップを説明するためのフローチャートである。図18は図16,図17の演算ステップの具体例を説明するためのフローチャートである。
本実施形態のマニピュレータシステムは、図7の表示部45に図11~図14のようなテンプレート画像作成画面45aを表示させることができるようになっている。この画面45aには、カメラ18で取得した顕微鏡画像を所定の倍率で表示する顕微鏡画面部101と、インジェクション側のテンプレート画像を表示するテンプレート画像表示部102と、ホールディング側のテンプレート画像を表示するテンプレート画像表示部103と、テンプレート画像作成要否の選択のためにテンプレート画像作成有無の入力手段として設けられたテンプレート画像作成要否ボタン104と、インジェクション側ボタン105と、ホールディング側ボタン106とが表示される。なお、テンプレート画像作成画面45aは、例えば、図7の表示部45上でのマウス49による操作で表示させることができる。
本実施形態における卵交換動作は、図9のように、インジェクションキャピラリ35とホールディングキャピラリ25との間の位置関係の計測(a)、インジェクションキャピラリ35の移動(b)、ホールディングキャピラリ25による陰圧低下(c)、インジェクションキャピラリ35の移動(d)、及び、未操作卵D2の移動後(e)のホールディングキャピラリ25による陰圧上昇の各動作がジョイスティック47上の各ボタンを押すことで自動的に実行されるが、図9(a)においてテンプレート画像を作成するステップS01~S10について図16を参照して説明する。
まず、図11の画面45aを図7の表示部45に表示させてから、図11のテンプレート画像作成要否ボタン104をマウス49の操作でクリックしてON(作成要)にする(S01)。
次に、ジョイスティック47上の割り当てられた例えばボタン47fを押すことで(S02)、顕微鏡20に取り付けているカメラ18から顕微鏡画像を取得し(S03)、その取得した顕微鏡画像が図11の顕微鏡画面部101に表示される(S04)。顕微鏡画面部101には、図11のように、卵Dを保持したホールディングキャピラリ25とインジェクションキャピラリ35とが拡大されて表示されている。
次に、図12のようにパターンマッチングするためのインジェクション側のテンプレート画像110A(図12の長方形状の破線で示す)をマウス49によるドラッグ操作で選択する(S05)。
次に、図13のインジェクション側ボタン105をマウス49の操作でクリックして上述の選択したテンプレート画像110Aをハードディスク等の記憶手段に記憶させる(S06)。この記憶されたテンプレート画像110Aが図13のように、テンプレート画像表示部102に表示される。
次に、ホールディング側のテンプレート画像を作成していない場合(S07)、上述と同様のステップS05,S06により、ホールディング側のテンプレート画像111A(図14)を選択し、ホールディング側ボタン106をマウス49の操作でクリックして上述の選択したテンプレート画像110Aを記憶させる。この記憶されたテンプレート画像111Aが図14のように、テンプレート画像表示部103に表示される。
上述のようにして両側のテンプレート画像110A,111Aを作成してから、テンプレート画像作成要否ボタン104をマウス49の操作でクリックしてOFF(作成否)にすると(S08)、自動でパターンマッチングによる解析を実行し(S09)、顕微鏡画面部101に表示されている顕微鏡画像にテンプレート画像110A,111Aと同じ部分(または近い部分)を検出した場合は、座標値算出等の演算を実行し(S10)、図9(a)のようなキャピラリ35とキャピラリ25との間の位置関係の計測を行い、上述の図9(b)からの操作が自動で開始される(S11)。
なお、ステップS09のパターンマッチングでテンプレート画像110A,111Aと同じ部分(または近い部分)を検出できなかったときは自動操作が開始しないようになっており、この場合は、例えば、再度テンプレート画像を取得する等の対策を実行する。
次に、上述のようにしてテンプレート画像を作成後の2回目以降の動作について図17を参照して説明する。
まず、テンプレート画像の作成が必要か否かを判断し(S21)、必要であれば、図16のステップS01に戻り、上記ステップを繰り返す。
次に、テンプレート画像の作成が不要であれば、ジョイスティック47のボタン47fまたはマウス49を操作することで(S22)、自動的に、顕微鏡画像の取得(S23)、その画像表示(S24)、パターンマッチングによる解析(S25)、座標値算出等の演算(S26)、自動操作開始(S27)を順に図16と同様にして実行する。
次の卵交換作業が残っており作業が未終了の場合(S28)、ステップS21に戻り、上述のステップを繰り返す。また、ステップS25のパターンマッチングでテンプレート画像と同じ部分(または近い部分)を検出できなかった場合もステップS21に戻り、再度テンプレート画像を作成する等の対策をとる。
次に、図16,図17の演算ステップS10,S26について図15,図18を参照して説明する。
まず、図16のステップS05,S06のテンプレート画像作成時にテンプレート画像に関する座標値等のデータを計測し、コントローラ43、あるいはコントローラ43に内蔵・接続されたハードディスク等の記憶手段に記憶させておく。そして、図15のように、座標値等のデータに基づいてテンプレート画像110Aの横方向長さX1,縦方向長さY1及びテンプレート画像111Aの横方向長さX2,縦方向長さY2を算出し、上述のステップS09,S25のパターンマッチング結果の各テンプレート画像110A,111Aの重心位置(図15の各「x」印で示す)を算出する(S31)。
次に、上述の2つのテンプレート画像110A,111Aによるパターンマッチング結果からインジェクションキャピラリ35とホールディングキャピラリ25との間の位置関係m(図15)を算出する(S32)。
次に、上記位置関係mに基づいて図9(b)の移動動作をするためのインジェクションキャピラリ35の所要ストローク量を算出する(S33)。すなわち、図15のインジェクションキャピラリ35のテンプレート画像110Aが破線で示すように矢印方向nに移動する場合のストローク量を算出する。
次に、インジェクションキャピラリ35を上記ストローク量だけ移動させるためにインジェクション用マニピュレータ16に対する指令値に変換する(S34)。このように変換された指令値によりインジェクションキャピラリ35が図9(b)のように移動することができる。
以上のように、本実施形態による動作(図16~図18)によれば、図9と同様の卵交換作業を繰り返して行う場合、ジョイスティック47上のボタンを1回押すのみで自動的にマニピュレータ14,16、シリンジポンプ29や注入ポンプ39等を駆動することができるから、従来のように巧みにマニピュレータの操作及びインジェクタの操作を行う必要がない。
すなわち、非特許文献1に示された従来のマイクロインジェクション法によれば、インジェクション作業をする培地中で操作済卵と未操作卵をドロップ中で混在しないようにし、操作済卵はドロップ上方へ移動させ、続いて下方から未操作卵を持ってくるが、この方法では、マニピュレータ自体の基本操作に慣れておく必要性があり、不慣れな作業者が操作する際、作業効率の低下が生じるという問題があったのに対し、本実施形態によれば、容易にかつ正確に卵交換作業を自動的に行うことができ、不慣れな作業者が操作しても作業効率の低下が生じることがない。
また、本実施形態のマニピュレータシステムにより卵交換作業を自動で行う際に、操作者が必要に応じ、テンプレート画像を作成しパターンマッチングによりパーソナルコンピュータ(コントローラ)43上で解析し、その結果に基づいてマニピュレータ14,16等を駆動することで自動化効率を向上させることができる。すなわち、先に作成したテンプレート画像を用いて次のパターンマッチングによる解析・演算を行うことができ、テンプレート画像を利用することで本実施形態のマニピュレータシステムによる自動化効率を向上させることができる。
さらに、卵交換作業を繰返していくうちにキャピラリ25,35の見え方が変わってきた場合、図17のステップS21で判断し、図16のステップS01に戻り、テンプレート画像作成要否ボタン104をONにしてテンプレート画像を再作成することができ、その都度テンプレート画像をアップデートすることができる。このように、テンプレート画像作成は操作者が必要と判断した場合に限り行うことができる。その結果、パターンマッチング時の誤認識やパターンマッチングによる不検出を防ぐことができる。
以上のように本発明を実施するための形態について説明したが、本発明はこれらに限定されるものではなく、本発明の技術的思想の範囲内で各種の変形が可能である。例えば、上述のシーケンス駆動は、図9(a)のような状態から開始したが、本発明はこれに限定されず、他の状態から開始するようにしてもよく、例えば、図10(e)のインジェクション操作の後から開始し、インジェクションキャピラリ35を卵から抜く動作からシーケンス駆動するようにしてもよい。また、例えば、図9(a)~(e)の操作をシーケンス駆動し、図10(a)~(e)の操作を手動としてもよい。
また、図7の焦点合わせ機構81は、自動で合焦動作を行うように構成してもよい。また、あらかじめ、あるいは作業中に記憶させた焦点位置情報に基づいて合焦動作を行えるようにしておいても良い。また、本実施形態の操作方法は、細胞操作、遺伝子組み換え操作、顕微受精等の微細操作に好適であり、このマニピュレータシステムは、細胞や卵等の電子機器検査・分析装置等に適用して好ましいものである。
また、例えば、図16~図18の動作は、本実施形態のマニピュレータシステムに限定されず、XYZ方向に駆動可能な電動マニピュレータに顕微鏡画像を取り込むためのカメラが装着されているシステムであれば適用可能であるので、マニピュレータは他の形式によるものであってもよい。
〈第3の実施形態〉
次に、図19に示す第3の実施形態を説明する。図19は、一つのシャーレに複数のドロップがある場合のインジェクション針、合焦機構の操作および動作を順を追って機構的に示すものである。この操作・動作に使用されるマニピュレータや顕微鏡等は第1および第2の実施形態におけるものと同様であるためその説明を省略する。
図19には、洗浄ドロップ、卵ドロップ、細胞ドロップの3つのドロップがあるものを例示している。この場合の具体的な操作および動作は以下の通りである。
先ず、マニピュレータにガラス針を装着する。次に、工程0から操作・動作を開始する。
工程0.試料ステージを駆動し、洗浄ドロップを顕微鏡視野下へ移動し、インジェクションガラス針の洗浄を行う。
工程1.この試料ステージの位置情報をコントローラへ記憶する。
工程2.試料ステージを駆動し、卵が入っているドロップを顕微鏡視野下へ移動する。
工程3.ジョイスティック操作により焦点合わせアクチュエータを駆動し、卵に焦点合わせをする。
工程4.ジョイスティック操作によりマニピュレータを駆動し、インジェクションガラス針の焦点を合わせる。
工程5.焦点合わせアクチュエータ、インジェクション側マニピュレータの位置情報を保存する。
工程6.試料ステージを駆動し、細胞や精子が入っているドロップを顕微鏡視野下へ移動する。
工程7.この試料ステージの位置情報をコントローラへ記憶する。
工程8.ジョイスティック操作により焦点合わせアクチュエータを駆動し、細胞(精子)に焦点合わせをする。
工程9.ジョイスティック操作によりマニピュレータを駆動し、インジェクションガラス針の焦点を合わせる。
工程10.焦点合わせアクチュエータ、インジェクション側マニピュレータの位置情報をコントローラに保存する。
工程11.細胞(精子)のハンドリング操作を行い、インジェクションガラス針内に保持する。
工程12.試料ステージを駆動し、卵が入っているドロップを顕微鏡視野下へ移動し、1回目のインジェクション操作をする。
工程13.ジョイスティック上の所定のボタンを押す。
工程14.工程5で記憶した位置情報の位置へ焦点合わせアクチュエータ、Z軸マニピュレータにより駆動する。
工程15.卵をホールドし2回目のインジェクション操作後、卵をリリースする。
工程16.コントローラ画面上の所定のボタンを押し、工程7で記憶した位置情報の位置まで自動で試料ステージを駆動し、細胞(精子)の入っているドロップへ移動させる。さらにこの動作前の位置情報を記憶する。
工程17.ジョイスティック上の所定のボタンを押す。
工程18.工程10で記憶した位置情報へ焦点合わせアクチュエータ、Z軸マニピュレータにより駆動する。
工程19.細胞(精子)のハンドリングをする.
工程20.コントローラ画面上の所定のボタンを押し、工程16で記憶された位置情報の位置へ自動で移動させる.
工程21.ジョイスティックの所定のボタンを押し、焦点合わせアクチュエータ、Z軸マニピュレータを駆動し、卵に焦点を合わせる。
工程22.卵をホールドし、3回目のインジェクション操作する。終了後卵をリリースする。4回以上のインジェクション操作をする場合は、工程17~22を繰返す。
上記のような繰返しインジェクション操作中、インジェクションガラス針の洗浄を行いたい場合は、コントローラ画面上の所定のボタンを押すと洗浄ドロップへ自動で移動し、洗浄終了後は所定のボタンを押すことで卵のドロップへ移動する(上記工程16,17と同じような動作)。
上記方法により、1回目のインジェクション操作中に記憶した位置情報を繰返し使用することでインジェクション操作、サンプリング操作時の焦点位置合わせ、マニピュレータZ軸位置合わせを容易に行うことが可能となる。
また、ドロップ間の移動もボタン操作のみで可能となり、インジェクション操作毎に試料ステージを駆動し目視で位置調整することを行わなくても良い。
また、操作中、再度記憶情報位置を調整したい場合は、位置調整後、位置記憶操作を改めて行うと良い。
さらに、ジョイスティックの各種ボタンに上記動作を割り当て、ジョイスティック操作のみで焦点合わせアクチュエータ,マニピュレータZ軸等を駆動することも、また、コントローラのボタン等に上記動作を割り当てコントローラのみで駆動することも可能である。また、試料ステージが駆動する動作に連動して、焦点合わせアクチュエータ、マニピュレータZ軸が記憶した位置情報へ行き来するようにしても良い。
ここで、第3の実施形態における上記マニュピュレータは第1および第2の実施形態あるいは第4の実施形態におけるマニュピュレータ14,16に相当し、試料ステージはベース22に相当し、ガラス針はインジェクションキャピラリ35に相当し、顕微鏡は顕微鏡20に相当し、コントローラはコントローラ43に相当し、ジョイスティックはジョイスティック47に相当し、焦点合わせアクチュエータは焦点合わせ機構81(第4の実施形態では焦点合わせ機構124)に含まれるものに相当し、Z軸マニュピュレータは駆動装置40,42を含マニュピュレータ14,16に相当するものとすることができる。
上記の通り、少なくとも対物レンズ位置、マニピュレータZ軸位置を2点記憶し、ジョイスティック操作、および/またはコントローラのボタン操作により2つの位置を容易に行き来することが可能なマニピュレーションシステムとすることにより、より一層効率的な作業が可能となる。
また、ジョイスティック操作、および/またはコントローラのボタン操作による動作の際は対物レンズ、マニピュレータが連動して駆動するマニピュレーションシステムとすることにより、より一層効率的な作業が可能となる。さらに、卵、細胞(精子)、洗浄用の各ドロップ位置の位置情報を記憶し、これに基づいて試料ステージを駆動することで、容易に各ドロップ間を行き来することが可能なマニピュレーションシステムとすることが可能となる。
〈第4の実施形態〉
次に、図20~図25を参照して第4の実施形態によるマニピュレータシステムについて説明する。本実施形態によるマニピュレータシステムは、図1~図8のマニピュレータシステムと基本的に同様の構成であるが、試料ステージを配置し、倒立顕微鏡型に構成したものである。
図20は、第4の実施形態によるマニピュレータシステムの構成を概略的に示す図である。
図20のように、本実施形態のマニピュレータシステム120は、顕微鏡観察下で微小な操作対象物である試料に人工操作を実施するためのシステムとして、一対のマニピュレータ14,16と、試料ステージ121と、顕微鏡ユニット125と、光源部126と、を備える。
顕微鏡ユニット125は、対物レンズ122a等から構成されて顕微鏡機能を有する顕微鏡122と、撮像素子としてのカメラ123と、自動による合焦動作が可能な焦点合わせ機構124とを備える。顕微鏡122は、対物レンズ122aが観察対象物の試料が収容されるシャーレRの下方に位置し、倒立型顕微鏡に構成されている。
試料ステージ121は、ガラス材料等の透光性材料からなるシャーレRなどが載置されるとともに、XY軸の平面方向に電動で駆動可能なようにX‐Y軸テーブルから構成され、駆動装置121a(図21)の駆動によりX軸、駆動装置121b(図21)の駆動によりY軸に沿ってそれぞれ移動可能になっている。
また、光源部126は、試料ステージ121上のシャーレRの直上に位置するように配置され、シャーレR内の試料に向けて光を照射する。
試料ステージ121上のシャーレR内の試料に光源部126から光が照射され、シャーレR内の試料を透過した光が顕微鏡122に入射すると、細胞に関する光学像が顕微鏡122で所定倍率に拡大されたあとカメラ123で撮像され、カメラ123の撮像による画像を基に試料を観察することができる。このとき、試料ステージ121をXY軸の平面方向に駆動することで、シャーレR内の試料を観察に適した位置にセットすることができる。
マニピュレータ14,16は、図1~図6と同様に構成され、試料ステージ121の左右に配置され、光源部126の直下に配置されるシャーレRに対し両側から操作ツールであるピペット24,34が延び、ピペット24,34の各先端側に装着されたガラス針からなるキャピラリ25,35によって、シャーレR内の微小な操作対象物である試料に対し所定の操作を行うことができる。
次に、図20のマニピュレータシステム120におけるパーソナルコンピュータ(コントローラ)143による制御について図21を参照して説明する。図21は図20のマニピュレータシステム120を制御するパーソナルコンピュータ(コントローラ)143による制御系要部を示すブロック図である。
図21のパーソナルコンピュータ(コントローラ)143は、図7のコントローラ43と基本的に同様の構成であるが、試料ステージ121のアクチュエータからなる駆動装置121a,121b等の駆動を制御し、試料ステージ121をXY軸方向に移動させる。
コントローラ143は、試料ステージ121を制御し、マニピュレータ14に取り付けられたピペット24のキャピラリ25と、マニピュレータ16に取り付けられたピペット34のキャピラリ35と、を駆動して所定位置にセットしたとき、その操作の際に駆動したアクチュエータの移動量を記憶する。このとき、移動量あるいは移動した位置を所定の基準位置からのX,Y座標として記憶しておいてもよい。例えば、コントローラ143がキャピラリ25,35の第2の位置を記憶することで、キャピラリ25,35が第2の位置から離れた第1の位置または第3の位置に移動した後、ジョイスティック147などの操作指示によって第2の位置に復帰できる。
なお、キャピラリ25,35の各位置とは、シャーレR内の特定位置に対する相対位置であり、試料ステージ121はその上に載るシャーレRをXY軸の平面方向に移動させることでキャピラリ25,35を各位置間で相対的に移動させる。
また、試料ステージ121は、図21の破線のように、そのX‐Y軸テーブルのX軸方向及びY軸方向の各位置を検出するエンコーダ等から構成された位置センサ121cを備えてもよい。位置センサ121cにより上記キャピラリ25,35の各位置を検出して得られたXY座標情報をコントローラ143が記憶し、かかるXY座標情報に基づいてコントローラ143の制御により試料ステージ121がキャピラリ25,35を第1位置、第2位置、第3位置へと移動させる。
本実施形態のマニピュレータシステム120は、カメラ123による画像をコントローラ143の表示部45で確認しながら倒立顕微鏡122に装着されたマニピュレータ14,16及び試料ステージ121をジョイスティック147などの操作により駆動する。
マニピュレータシステム120により、インジェクション操作を行う際、シャーレを試料ステージ121上にセットした状態で、試料ステージ121を駆動し、他の培地の位置情報をコントローラ143に記憶する操作を行う。この位置記憶操作はインジェクション操作中にも行うことが可能で、記憶位置はその都度変更することが可能である。
次に、図21のコントローラに接続される操作手段としてのジョイスティック147及びその操作例について図22,図23を参照して説明する。
図22は、図21のジョイスティックの具体例を示す斜視図である。図23は図20の試料ステージ上に載置されたシャーレ内の複数の培地B1~B3を示す概略的な平面図で、顕微鏡視野が培地B1(a)、培地B2(b)、培地B3(c)にある各状態を示す。
図22に示すように、ジョイスティック147は、図8に示すものと基本的に同様の構成であるが、下部にレバー47hを有する。レバー47hは、図の方向A、その反対の方向Bへと回動し、方向Aに回動した上端位置、方向Bに回動した下端位置、それらの中間位置に切り換え可能である。レバー47hの切り換えスイッチは、その上端位置、中間位置、下端位置がキャピラリ25,35の第1位置、第2位置、第3位置に対応している。
すなわち、ジョイスティック147のレバー47hを上下させることで、予め記憶した位置へ試料ステージ121を駆動する。例えば、図23(a)~(c)のような配置でシャーレR上に複数の培地B1~B3が形成されている場合、レバー47hを上に方向Aへ回動させ上端位置にすると試料ステージ121を駆動し培地B1を顕微鏡視野KF下へ移動させるようにし、レバー47hを下に方向Bへ回動させ下端位置にすると培地B3を顕微鏡視野KF下へ移動させ、レバー47hを中間位置にすると、培地B2を顕微鏡視野KF下へ移動させる。培地B2が復帰させたい元の位置の場合、レバー47hを上端位置または下端位置から中間位置にすることで元の位置に戻ることができる。
なお、シャーレR上に複数の培地は、例えば、培地B1を洗浄用、培地B2を卵用、培地B3を細胞(精子)用とすることができる。
上述のジョイスティック147のレバー47hの操作により、マニピュレータ14,16を操作するジョイスティック147からほとんど手を離さず他の操作手段を使用せずに培地B1~B3の間を移動できかつ一の培地から他の培地へ移動する際にその培地位置を探すために対物レンズの倍率を変更する操作をしなくてもよく、誰もが容易に培地間を移動させる操作を簡単に行うことが可能となる。
上述のように、キャピラリ25,35が培地間を移動する際、培地中の微小な操作対象物である卵がキャピラリ(ガラス針)と接触し、操作済とそうでないものが混在することを防ぐために、試料ステージ121の駆動と連動してキャピラリを上方に退避させる。
図20の試料ステージ121上のシャーレR内に形成された複数の培地間をキャピラリが移動する際の上記退避動作について図24を参照して説明する。
図24は図20のジョイスティック147のレバー47hの操作で移動する際のキャピラリとシャーレ内の複数の培地との位置関係を概略的に示す側面図で、培地B2での操作対象物に対する操作位置(a)、Z軸方向の移動位置(b)、培地B3の移動位置(c)をそれぞれ示す。
例えば、キャピラリ25,35をシャーレR上の図23(b)の培地B2から図23(c)の培地B3へ移動させる場合、図24(a)のように、キャピラリ25,35がシャーレR上の図23(b)の培地B2内の微小な操作対象物C2に対し所定の操作を行う所定位置で、ジョイスティック147のレバー47hを中間位置から下げ下端位置にすると、コントローラ143は、培地B2内におけるマニピュレータ14,16の各XYZ位置と、試料ステージ121のXY位置を記憶する。
次に、図24(b)のようにマニピュレータ14,16がキャピラリ25,35をZ軸上方に所定量移動させて退避させる。
次に、図23(c)のように、試料ステージ121がシャーレRをキャピラリ25,35が図23(b)の培地B2から図23(c)の培地B3へ移動するように移動させる。
次に、マニピュレータ16がインジェクション側のキャピラリ35をZ軸下方に所定量移動させて、操作者はジョイスティック147を操作し、培地B3内の微小な操作対象物C3に対し必要な操作を行う。
次に、レバー47hを中間位置すると、上述と逆の動作をして、マニピュレータ14,16と、試料ステージ121とは、上述の記憶した図24(a)の培地B2の所定位置に戻る。
上述のように、キャピラリ25,35を培地B2から培地B3へと移動させる際に、予めZ軸上方へと退避させることで、培地B2中の微小な操作対象物C2(例えば卵)とキャピラリ25,35との接触を防止できるので、操作済の卵と操作前の卵との混在を防ぐことができる。なお、上述の移動前にキャピラリ25,35をX軸方向(図の横方向)に互いに離れるように後退させてもよい。
次に、図20~図22のマニピュレータシステム120によってキャピラリ25,35をシャーレR上の複数の培地間を移動させる動作について図25を参照して説明する。
図25は本実施形態でキャピラリとシャーレ内の複数の培地との位置関係を概略的に示す側面図で、培地B2での操作対象物に対する操作位置で記憶される位置(a)、X軸方向への移動位置(b)、Z軸方向への移動位置(c)、別の培地の移動位置(d)、インジェクション側キャピラリのZ軸方向の移動位置(e)、インジェクション側キャピラリの操作位置(f)をそれぞれ示す。
マニピュレータシステム120は、図25(a)のように、キャピラリ25,35がシャーレR上の培地B2内の微小な操作対象物C2に対し所定の操作を行う所定位置にジョイスティック147の操作で移動した後、ジョイスティック147のレバー47hを中間位置から下げて下端位置にすると、次のような所定のシーケンスで移動動作を行う。
まず、コントローラ143は、図25(a)の所定の操作を行う所定位置におけるマニピュレータ14,16の各XYZ位置と試料ステージ121のXY位置とを記憶する。
次に、図25(b)のようにマニピュレータ14,16がキャピラリ25,35をX軸方向に互いに離れ後退するように所定量移動させ、次に、図25(c)のようにZ軸上方に所定量移動させる。このように、次の培地への移動前にキャピラリ25,35をX軸方向及びZ軸方向に退避させる。
次に、図25(d)のように、試料ステージ121を駆動してキャピラリ25,35をシャーレR上の次の培地B3へと移動させる。次に、図25(e)のようにマニピュレータ16によりインジェクション側のキャピラリ35をZ軸下方に所定量移動させる。
次に、図25(f)のように、マニピュレータ16によりインジェクション側のキャピラリ35をX軸の図の左方に所定量移動させて、操作者はジョイスティック147を操作し、培地B3内の微小な操作対象物C3に対し必要な操作を行う。例えば、操作対象物C3が精子である場合、キャピラリ35でサンプリング操作し精子をサンプリングしキャピラリ35に保持させる。
次に、レバー47hを中間位置すると、上述と逆の動作をして、マニピュレータ14,16と、試料ステージ121とは、記憶した図25(a)の培地B2の所定位置に戻る。そして、培地B2で、例えば、微小な操作対象物C2が卵である場合、キャピラリ25でホールドされた卵に対しキャピラリ35から精子をインジェクションする。
以上のようにして、キャピラリ25,35を培地B2内の所定位置から次の操作のための培地B3内の所定位置に移動させることができる。このとき、試料ステージ121とマニピュレータ14,16とが連動し、試料ステージ121により培地間の比較的長い距離の移動を行うとともにマニピュレータ14,16によりキャピラリ25,35の退避のための比較的距離の短い移動を行う。
また、試料ステージ121を駆動する直前のマニピュレータ14,16のXYZ位置を記憶しておけば、培地間の移動後、記憶したXYZ位置にマニピュレータ14,16を駆動すればキャピラリ25,35の位置を調整する手間を省くことが可能となる。かかる機能を使用することで操作者がマニピュレータ14,16を大きく駆動し調整操作することなく、常時同じ位置でキャピラリ25,35を操作することが可能になる。
また、培地B2と培地B1との間で上記と同様にキャピラリ25,35を移動させる場合にもレバー47hを上方に回動させて上端位置にすることで図24または図25の順序で同じように動作させることができる。
従来、非特許文献3のようなインジェクション操作の際、特に細胞、精子を卵細胞ヘインジェクションする場合、卵、細胞、洗浄と異なる用途の培地がシャーレ上に存在するが、操作内容に応じ、操作者はこれらの培地間でキャピラリを行き来させなければならず、その際、顕微鏡視野下は拡大されているため全ての培地間の位置関係を把握することが難しく、顕微鏡倍率を低倍にし、試料ステージを操作者が駆動し培地間を移動させていた。すなわち、インジェクション操作を従来のマニピュレータで行うときに次のような問題点があった。
(1)インジェクション操作を行う顕微鏡倍率での視野下では、シャーレ全体の状況を把握することができない。そのため、シャーレ上の培地間を移動するためには顕微鏡倍率を低倍にし、位置関係を把握した後、試料ステージを操作しなければならない。
(2)手動で試料ステージを駆動し、培地間を移動した際、移動する前のインジェクション操作場所へ戻るにはその位置を覚えておかなければならず、不慣れな操作者では、元の操作位置を見失ってしまう。
(3)培地間の移動をする際は、試料ステージを駆動すると培地内の操作対象がガラス針(キャピラリ)と接触する可能性があり、その結果、操作済とそうでないものが混在してしまうため、インジェクション操作を行うガラス針が操作対象と干渉しないように試料ステージを操作しなければならない。そのため、培地間の移動後には再度ガラス針の位置調整作業が必要となる場合もあり、単純な試料ステージの操作だけでは操作が難しい。
本実施形態は、顕微鏡倍率の変更操作なしで容易に培地間を移動でき、操作者が移動したい培地を探す必要がなく、ドロップ間や培地間を移動しても再位置調整などが不要であるマニピュレータシステムを提供することを目的とする。
本実施形態のマニピュレータシステム120によれば、ジョイスティック147のレバー47hを操作することで試料ステージ121及びマニピュレータ14,16が所定のシーケンスで動作し、キャピラリ25,35を複数の培地間や複数のドロップ間で移動させることができるので、顕微鏡倍率を低倍率に変更する操作をすることなく容易に培地間を移動させることができ、操作者が移動したい培地やドロップを探す必要がなくなる。また、培地間やドロップ間の移動の際に、インジェクション操作を行うガラス針であるキャピラリ25,35を操作対象物と干渉しないように自動的に退避させてから元の位置に戻るので、培地間やドロップ間を移動してもキャピラリ25,35の再位置調整などは不要であり、作業が容易となる。また、図19のような洗浄ドロップ、卵ドロップ、細胞ドロップの3つのドロップ間におけるガラス針(キャピラリ)の移動を容易な操作で実現できる。
上述の一連の動作をレバー操作により試料ステージ121及びマニピュレータ14,16が連動して実行するため、容易な操作で実現できる。
〈第5の実施形態〉
次に、図26,図27を参照して第5の実施形態によるマニピュレータシステムについて説明する。
第5の実施形態によるマニピュレータシステムは、図20~図22と基本的に同様の構成であり、カメラ123による画像をコントローラ143の表示部45で確認しながら倒立顕微鏡122に装着されたマニピュレータ14,16及び試料ステージ121をジョイスティック147やマウス49などの操作により駆動し、インジェクション操作を行うマニピュレータのXYZ軸方向の移動を操作し精子をサンプリングした後、操作者の指示により、透明帯穿孔位置に自動で戻りかつ焦点位置も自動で調整するようにしたものである。
図26は第5の実施形態のマニピュレータに装着された各キャピラリと微小な操作対象物との位置関係を示す図で、ホールディングキャピラリが保持した卵にインジェクションキャピラリが接近した状態(a)、インジェクションキャピラリが卵の透明帯を穿孔した状態(b)、透明帯穿孔後インジェクションキャピラリを卵から抜いた状態(c)、精子サンプリングモードに変更した状態(d)、インジェクションマニピュレータで精子サンプリングを操作する状態(e)、精子のサンプリングを完了した状態、この精子のサンプリングのとき試料ステージを駆動してサンプリングしやすい位置に移動した状態(g)及びその移動後サンプリングを完了した状態(h)を示す図である。
図27は、図26の精子サンプリング完了後、インジェクションモードに変更した状態(a)、透明帯穿孔位置からインジェクションキャピラリが卵の細胞質内に刺し込まれた状態(b)、精子を細胞質内に注入した状態(c)及び卵からインジェクションキャピラリを抜いた状態(d)を示す図である。
まず、図26(a)のように、ホールド側マニピュレータ14を操作し、図9(a)や図10(a)と同様にしてホールディングキャピラリ25により陰圧で卵Dを保持する。なお、図26(a)において太線で示す位置が焦点を合わせたZ軸(上下)位置であり、以下の図においても同様である。
次に、図26(b)のように、マニピュレータ16を操作し、インジェクションキャピラリ35をインジェクション位置へ移動し、図21の圧電素子92を駆動して卵Dの透明帯Tを穿孔した後、図26(c)のように、インジェクションキャピラリ35を卵Dからいったん抜く。このとき、卵Dの透明帯Tには穿孔した穴T1が形成される。
次に、コントローラ143を操作し、図26(d)のように、精子サンプリングモードに変更し、精子サンプリング操作を開始するが、このとき、焦点合わせ機構124の位置、インジェクション側・ホールド側の各マニピュレータ14,16のXYZ軸の位置、試料ステージ121のXY軸の位置をコントローラ143が記憶する。この記憶は、例えば、図22のジョイスティック147のレバー47hを下端位置にすることで実行される。
その後、図26(d)のように精子Uに顕微鏡焦点が合う位置まで自動で焦点合わせ機構124及びマニピュレータ16のZ軸を駆動する。シャーレ底から透明帯穿孔位置までの高さはおおよそ一定のため、この位置はコントローラ143上で卵Dに焦点が合っている位置から算出した位置を用いる。
次に、図26(e)のように、インジェクション側マニピュレータ16のXYZ軸方向移動でインジェクションキャピラリ35を操作して精子Uをサンプリングする。そして、図26(f)のように、サンプリングする精子Uをインジェクションキャピラリ35の先端近傍に保持することで、精子のサンプリングが完了する。
この精子のサンプリングのとき、図26(g)のように、試料ステージ121を駆動するとともにそれと同期して同じ移動量だけホールド側マニピュレータ14もXY軸方向に移動するように駆動しサンプリング操作し、図26(h)のように精子Uのサンプリングが完了する。
次に、上述のように精子Uをインジェクションキャピラリ35に保持した後、コントローラ143を操作し、図27(a)のように、精子インジェクションモードに変更する。そして、コントローラ143を操作し、インジェクション側マニピュレータ16をXYZ軸方向に自動で駆動することで、インジェクションキャピラリ35が図26(d)で記憶した透明帯穿孔位置へ戻り、同時に焦点合わせ機構124を同じく記憶した位置へ駆動する。
このとき、図26(g)のように試料ステージ121も駆動しているのであれば、ホールド側マニピュレータ14及び試料ステージ121を前に記憶した位置へ移動させる。このように、精子サンプリング操作中に試料ステージ121とホールド側マニピュレータ14のXY軸は同期して同じ移動量で駆動しているため、精子サンプリング後、インジェクションキャピラリ35が透明帯穿孔位置へ戻った場合、穿孔した穴T1に対しずれてしまうことを防ぐことが可能となる。
次に、図27(b)のように、圧電素子92を駆動しインジェクションキャピラリ35で穿孔した穴T1から細胞膜を穿孔し、インジェクションキャピラリ35を細胞質S内に刺し込む。
次に、図27(c)のようにインジェクションキャピラリ35から精子Uを細胞質S内にインジェクションする。次に、図27(d)のようにインジェクションキャピラリ35を卵Dから抜く。
以上のようにして、卵Dの透明帯Tを穿孔後、精子Uをサンプリングしてから、自動で穿孔した位置に戻り、卵Dの細胞質S内にインジェクションすることができる。
従来、非特許文献3のようなICSI(顕微受精)操作では、インジェクションキャピラリ内にインジェクションする精子を保持した後、卵の透明帯を穿孔しインジェクション操作を行っている。このとき、細胞質内へ精子をインジェクションする操作において、保持していた精子がインジェクションキャピラリのガラス針内で引っかかり、付着する問題があった。また、精子をインジェクションする際に、余分な溶液を注入することは、後の胎児発生率低下の可能性がある。この問題を回避するためにはインジェクタを巧みに操作し、ガラス針内の精子の位置をコントロールし操作しているが、この方法は熟練した技術を要していた。すなわち、インジェクション操作を従来のマニピュレータで行うときに第4の実施形態で説明したのと同様の問題点(1)~(3)があった。
本実施形態は、精子サンプリング操作の難しさを最小限に抑えるとともに細胞質内ヘインジェクションする際に精子以外の余分な物質の注入を最小限に抑え胎児発生効率を向上可能なマニピュレーションシステムを提供することを目的とする。
本実施形態では、上述のように、卵の透明帯穿孔後に精子をインジェクションキャピラリ内に保持し、その後細胞質内ヘインジェクションを行う。このような方法はラットの顕微授精に用いられているが、手動操作で行う場合、10μm以下(程度)に透明帯を穿孔した箇所に精子サンプリング後に確実にインジェクションキャピラリの位置を穿孔した位置へ移動しなければならない難しさがある。そこで、本実施形態では、透明帯穿孔後に精子をサンプリングする操作を行う直前にインジェクション側マニピュレータ16のXYZ軸の位置を記憶し、精子のサンプリング操作を行った後、インジェクションキャピラリを自動で記憶した位置へ戻るようにし、かつ、焦点合わせも自動的に行う。
本実施形態によれば、インジェクション側マニピュレータ16は、卵の透明帯穿孔後のインジェクション側マニピュレータ16のXYZ軸の位置をコントローラ143が記憶した後、操作者が、精子のサンプリングを指示すると自動で精子サンプリング位置ヘインジェクションキャピラリを移動しかつ焦点あわせをする。
インジェクション側マニピュレータ16を操作し精子をサンプリングした後、操作者の指示により、記憶された透明帯穿孔位置に自動で戻りかつ焦点位置も自動で調整することにより、精子サンプリング操作の難しさを最小限に抑えることができるとともに、細胞質内ヘインジェクションする際に精子以外の余分な物質の注入を最小限に抑えることができ、胎児発生効率を向上させることが可能となる。
〈第6の実施形態〉
次に、図28を参照して第6の実施形態によるマニピュレータシステムについて説明する。
第6の実施形態によるマニピュレータシステムは、図20~図22と基本的に同様の構成であり、電動による試料ステージ121、電動による焦点合わせ機構124、2台のマニピュレータ14,16、及びカメラ123を設置した顕微鏡ユニット125を備え、一方のマニピュレータ14には操作対象をホールド可能な操作ツール(ホールディングキャピラリ)を設置し、他方のマニピュレータ16には微細電極とガラス針(インジェクションキャピラリ)とを配置し、卵等の微小な操作対象物をホールドツールで保持し、微細電極に電界をかけ操作対象物の透明帯の穿孔操作を行い、その後、インジェクションキャピラリによりインジェクション操作を行うものである。
図28は第6の実施形態の各マニピュレータに装着されたキャピラリと微小な操作対象物との位置関係を示す図で、微小な操作対象物である卵がホールディングキャピラリに保持され、電極とインジェクションキャピラリが近くにある状態(a)、電極が卵の透明帯を穿孔する状態(b)、透明帯に穿孔した穴を形成した状態(c)、インジェクションキャピラリが駆動され穿孔された卵に操作可能である状態(d)、インジェクションキャピラリによるインジェクション操作の状態(e)及びインジェクション操作が終了した状態(f)を示す。
本実施形態では、図20,図21のマニピュレーションシステムを使用し、図28(a)のように、ホールド用マニピュレータ14の先端には卵を保持するためのホールディングキャピラリ25を装着し、インジェクション用マニピュレータ16の先端にはインジェクションキャピラリ35と先端が尖った微細な電極130とを装着している。
電極130は卵Dの透明帯Tを穿孔するために使用され、電圧印加のためのアンプ及び信号発生器に接続されている。インジェクションキャピラリ35はインジェクタに接続されている。電極130とインジェクションキャピラリ35とはマニピュレータ16の先端に並行して設置されている。
まず、図28(a)のように、ホールド用マニピュレータ14によりホールディングキャピラリ25で操作する卵Dを保持する。
次に、図28(b)のように、インジェクション用マニピュレータ16を駆動し電極130の先端を卵Dに近づけ、電極130に電圧を印加し卵Dの透明帯Tを穿孔する。このとき電極130の先端は卵Dに接していても接していなくてもよい。
次に、図28(c)のように、電極130により透明帯Tを穿孔した後、インジェクション用マニピュレータ16を駆動し、電極130を図の右方向に退避させる。卵Dの透明帯Tには穿孔された穴T1が形成されている。
次に、図28(d)のように、インジェクション用マニピュレータ16を駆動し、インジェクションキャピラリ35を平行移動して卵Dに対する操作位置に設定する。インジェクションキャピラリ35の先端には精子Uが保持されている。
次に、図28(e)のように、インジェクション用マニピュレータ16を駆動し、インジェクションキャピラリ35を先に透明帯Tに穿孔した穴T1から刺し、インジェクション操作をし、精子Uを細胞質S内に注入する。
次に、図28(f)のように、インジェクションキャピラリ35を図の右方向に退避させてインジェクション操作が完了する。
なお、インジェクションキャピラリ35の先端には精子Uを保持しておくが、この操作は電極130による透明帯穿孔操作を行う前に準備しておくことが好ましい。また、インジェクションキャピラリ35と電極130との間の距離は、各操作中に、インジェクションキャピラリ35と電極130とが干渉しないよう少なくとも卵1個分の直径以上となるように設置することが好ましい。
従来、卵の透明帯を穿孔する方法には、圧電アクチュエータによる場合と、レーザ光による場合の主に2通りある。圧電アクチュエータを使用する場合、ガラス針へ瞬間的な振動を与え、ガラス針内部に生じる圧力差を利用し、透明帯を穿孔している。レーザ光を使用する場合は、卵に対し鉛直方向ヘレーザ光を当て、その部分にスリット上の穿孔をする。
しかし、本発明に係る以前の従来の圧電アクチュエータは透明帯穿孔と同時に細胞質ヘガラス針によりダメージを与えてしまう場合があり、操作するためには熟練した手技が必要であった。レーザ光を使用する場合、透明帯を容易に穿孔できるものの、小さな穴ではなく、スリット状に穿孔されてしまう。そのため、卵には大きな切れ目が存在することになり、卵への負担が大きくなる。
本実施形態は、卵の透明帯の穿孔操作において細胞質へのダメージを抑えつつできるだけ小さな穴を穿孔できるようにしたマニピュレータシステムを提供することを目的とする。
本実施形態では、圧電アクチュエータやレーザ光を透明帯穿孔には使用せず、上述のように透明帯穿孔には微小電極を使用する。顕微授精等のインジェクション作業が必要な場合はマニピュレータの電極取付部に並列にインジェクションキャピラリを取り付ける。そのキャピラリをマニピュレータで操作し電極による穿孔操作後、インジェクション操作を行う。
本実施形態によれば、電極による穿孔操作により、従来用いられている圧電アクチュエータに比べ穿孔時に卵へ振動を与えることを低減できかつ透明帯穿孔時にガラス針により細胞質を破壊し死滅させることを防ぐことができる。
また、本発明に係る以前の従来のように透明帯穿孔のためにレーザ光を使用すると卵をスリット状に穿孔してしまいダメージが大きいのに対し、本実施形態では高価なレーザ装置を使用せずに安価な電極を用いて微小な穿孔が可能であり、低ダメージで小さな穴を開けることが可能になる。このように、穿孔後、操作ツールを平行移動するだけで、低ダメージで形成した微小な穴からインジェクション操作を簡単かつ確実に行うことができる。
〈第7の実施形態〉
次に、図29~図34を参照して第7の実施形態によるマニピュレータシステムについて説明する。
図29は第7の実施形態のマニピュレータシステムを制御するパーソナルコンピュータ(コントローラ)143による制御系要部を示すブロック図である。図30は本実施形態のマニピュレータシステムに配置されるスイッチ操作部の例を示す図である。図31は図30のスイッチ操作部の各操作例(a)~(e)を示す図である。図32は第7の実施形態におけるマニピュレータによるキャピラリ交換位置への移動動作(a)~(d)を説明するための図である。図33は図32のキャピラリ交換位置から元の位置に復帰する動作(a)~(d)を説明するための図である。図34は、本実施形態のマニピュレータシステムの光源部を側面(図20のマニピュレータ16側)から見た概略図である。
本実施形態によるマニピュレータシステムは、図20~図22と基本的に同様の構成であり、電動によるマニピュレータ14,16及び電動による試料ステージ121が倒立顕微鏡に装着され、顕微鏡に装着したカメラ画像をコントローラ143の表示部45上で確認しながらジョイスティック147などにより操作し、スイッチ操作で容易にガラス針(キャピラリ)を装着し交換できる位置へ移動し、交換後に元の顕微鏡視野下に自動的に復帰できるようにしたものである。図29のパーソナルコンピュータ(コントローラ)143は図21と基本的に同様であるが、スイッチ操作部150,センサ161A,Z軸リミットスイッチ162,163の信号が入力されるようになっている。
本実施形態では、キャピラリ(ガラス針)の顕微鏡視野下での位置は、マニピュレータ14,16のZ軸(上下方向)に図29に示すリミットスイッチ162,163を配置し、リミットスイッチ162,163が反応する位置からの座標を把握し、その各座標情報をコントローラ143へ入力し、記憶させておく。リミットスイッチ162は、例えば、図32(a)のようにZ軸上方に配置される。リミットスイッチ163も同様に配置される。
図20の倒立顕微鏡の光源部126は、図34の破線のようにキャピラリ交換のための作業スペースを確保するために矢印方向に倒れるように軸126bを中心に回動し傾斜して退避するようになっている。光源部126を傾斜させてからキャピラリ交換操作を行う。図34のように、光源部126の脚部126aの近傍に図29に示すセンサ161Aを設け、光源部126が傾斜していなければ、その状態を接触型のセンサ161Aが検知し、キャピラリ交換動作をマニピュレータ14,16が実行しないように制御される。その結果、誤操作による光源部126とキャピラリとの接触を防止できる。なお、センサ161Aは、フォトマイクロセンサと遮光板とから構成される光センサ等の非接触型センサとしてもよい。
図30に示すように、マニピュレータシステムにはスイッチ操作部150が配置され、例えば、顕微鏡設置場所の近辺に設置される。スイッチ操作部150は、電動手動切替スイッチ151と、ホールド側、インジェクション側のマニピュレータ14,16を切り替える駆動軸切替スイッチ152と、退避セット動作切替スイッチ153と、を備える。各スイッチはON・OFFの押しボタン切替式で、スイッチ151は、電動押しボタン151aと手動押しボタン151bとを有し、スイッチ152は、ホールド押しボタン152aとインジェクション押しボタン152bとを有し、スイッチ153は退避押しボタン153aと中立押しボタン153bとセット押しボタン153cとを有する。
スイッチ操作部150の各スイッチ151~153を操作することでキャピラリを交換する位置へ移動させることができる。顕微鏡視野下からキャピラリを交換する位置までの移動は次のように行うことができる。
図34の破線のように、図20の光源部126を手動で傾斜させる。次に、図31(a)のように電動手動切替スイッチ151の電動押しボタン151aを押し、駆動軸切替スイッチ152により駆動したいマニピュレータ14または16を選択する。例えば、ホールドボタン152aを押してホールド側マニピュレータ14を選択し、電動押しボタン151aによるモータの励磁がON状態になるまで待機する。
次に、図31(a)で退避セット動作切替スイッチ153の中立ボタン153bがONであるが、例えば、図31(b)のように退避ボタン153aを選択すると、ホールド側マニピュレータ14が退避動作を開始する。この退避動作について図32を参照して説明する。
図32(a)のように、ホールド側マニピュレータ14に装着されたピペット24の先端のキャピラリが操作対象物を収容するシャーレRに位置している状態から、ホールド側マニピュレータ14を駆動して図32(b)のようにキャピラリが干渉しないようにX軸方向へ所定量退避する。
次に、図32(c)のようにZ軸方向上方にリミットスイッチ162(図29)が反応する位置まで移動させる。
次に、図32(d)のように、Y軸方向へ駆動し、ピペット24の装着部を操作者手前方向に所定量移動させる。上述の移動後、図31(c)のように中立ボタン153bをONにする。
上述のようにして、ホールド側マニピュレータ14によりピペット24の先端のキャピラリをXYZ軸の各方向に移動させて、交換位置への移動後に、キャピラリの装着・交換を行う。
次に、図31(d)のように、退避中立セット動作切替スイッチ153のセット押しボタン153cをONにすると、ホールド側マニピュレータ14がピペット24の先端のキャピラリを顕微鏡視野下へと移動させる。
すなわち、ホールド側マニピュレータ14のXYZ軸が図33(a)のキャピラリ交換位置である状態から、図33(b)のようにY軸方向に移動し、次に図33(c)のようにZ軸方向に移動し、次に図33(d)のようにX軸方向に移動する。このとき、X軸、Y軸の移動量は、図32(b)(d)とそれぞれ同じで、移動方向が反転している。Z軸の移動量は上方向のリミットスイッチ163の位置から設定した所定量で、移動方向が下方である。このようにして、ホールド側マニピュレータ14はキャピラリ25を元の顕微鏡視野下に再現性よく戻すことができる。
次に、図31(e)のように、退避セット動作切替スイッチ153の中立ボタン153bをONにし、光源部126を起こして図34の実線で示す元の位置に戻すと、本プログラムが終了する。
なお、必要であれば電動手動切替スイッチ151によりモータの励磁をOFFにしてからキャピラリの位置の微調整を行う。また、インジェクション側マニピュレータ16についても同様の手順でキャピラリの交換位置に移動させ、元の顕微鏡視野下の位置に戻ることができる、
また、本実施形態では、上記実施例では片方ずつのマニピュレータを駆動するようにしたが、両方のマニピュレータを同時に駆動してもよい。その際はX、Y軸方向の移動量を異なるように設定すれば、キャピラリ交換・装着の作業位置をずらすことができるため作業に支障はない。
また、マニピュレータをXYZ軸方向に駆動する際、一連の動作をするプログラムの開始、終了時、Z軸上方リミットスイッチ認識後にはコントローラ143上の位置情報をリセットするようにする。また、Z軸方向への駆動は必ずはじめに上方のリミットスイッチ162(図29)を認識する動作をした後に実行する。これにより、例えばスイッチの誤操作によるキャピラリの折損を回避することが可能となる。
従来、キャピラリをマニピュレータに装着し、顕微鏡視野下へ位置合わせをする際、マニピュレータを大きく動かしてキャピラリを装着しやすい作業スペースを確保して作業を行ったが、このとき、マニピュレータは手動で操作することが多いため顕微鏡視野下ヘキャピラリをもどす位置合わせが難しいといった問題があった。
本実施形態は、キャピラリの装着・交換操作を操作者によるマニピュレータの手動操作を極力減らし容易に実現可能なマニピュレータシステムを提供することであり、キャピラリを装着・交換すること、キャピラリを顕微鏡視野下ヘ再セットするという2つの操作をシーケンス駆動によって実現するものである。
従来、キャピラリ交換作業後に手動操作で適当量マニピュレータを移動して元の位置にもどすのが難しいといった問題点に対し、本実施形態によれば、キャピラリ交換作業を再現性よく同じ位置で操作できるようになり、かつキャピラリを顕微鏡視野下へ位置調整する際も、手動により大きくマニピュレータを駆動する必要がなく、再現性よくもとの顕微鏡視野下近傍ヘキャピラリを移動することができるため、作業が容易となる。
上述のように、一連のシーケンス動作によりマニピュレータがキャピラリを、交換・装着しやすい位置と顕微鏡視野下とに行き来させることが可能なマニピュレーションシステムを実現できる。
〈第8の実施形態〉
図35は第8の実施形態によるマニピュレータシステムの概略的構成を示す図である。
図35において、マニピュレータシステム10は、顕微鏡観察下で細胞等の微小対象物に人工操作を実施するためのシステムとして、顕微鏡ユニット12と、ホールディング用マニピュレータ14と、インジェクション用マニピュレータ16とを備え、顕微鏡ユニット12の左右にマニピュレータ14,16が配置されている。
顕微鏡ユニット12は、カメラ18、顕微鏡20、ベース22を備え、ベース22の上方に顕微鏡20が配置され、顕微鏡20にはカメラ18が連結されている。ベース22上には細胞等の微小対象物が載置可能であり、ベース22上の細胞(図示せず)に顕微鏡20から光が照射される。ベース22上の細胞で反射した光が顕微鏡20に入射すると、細胞に関する光学像は、顕微鏡20で拡大された後、カメラ18で撮像され、カメラ18の撮像による画像を表示部45に表示し、細胞を観察できる。
ホールディング用マニピュレータ14は、直交3軸構成のマニピュレータとして、ホールディングピペット24、XY軸テーブル26、Z軸テーブル28、XY軸テーブル26を駆動する駆動装置30、Z軸テーブル28を駆動する駆動装置32を備えている。ホールディングピペット24は、Z軸テーブル28に連結され、Z軸テーブル28はXY軸テーブル26上に上下動自在に配置されている。XY軸テーブル26は、駆動装置30の駆動により、X軸またはY軸に沿って移動するように構成され、Z軸テーブル28は、駆動装置32の駆動により、Z軸に沿って(鉛直軸方向に沿って)移動するように構成されている。
Z軸テーブル28に連結されたホールディングピペット24は、その先端にホールディングキャピラリ25が装着されており、XY軸テーブル26とZ軸テーブル28の移動に従って三次元空間を移動領域として移動し、ホールディングキャピラリ25によりベース22上の細胞等を保持するように構成されている。
インジェクション用マニピュレータ16は、直交3軸構成のマニピュレータとして、インジェクションピペット34、XY軸テーブル36、Z軸テーブル38、XY軸テーブル36を駆動する駆動装置40、Z軸テーブル38を駆動する駆動装置42を備え、インジェクションピペット34は、Z軸テーブル38に連結され、Z軸テーブル38はXY軸テーブル36上に上下動自在に配置され、駆動装置40、42はコントローラ43に接続されている。
なお、図35では、マニピュレータ14,16は下方からX軸Y軸Z軸の順で駆動する構成であるが、この構成順序(配置方法)に限定されるものではなく、他の順序で構成してもよく、例えば、ピペット24,34をX軸やY軸のテーブルに連結する構成であってもよい。
XY軸テーブル36は、駆動装置40の駆動により、X軸またはY軸に沿って移動するように構成され、Z軸テーブル38は、駆動装置42の駆動により、Z軸に沿って(鉛直軸方向に沿って)移動するように構成されている。Z軸テーブル38に連結されたインジェクションピペット34は、その先端にインジェクションキャピラリ35が装着され、インジェクションキャピラリ35は、針状になっており、ベース22上の細胞等に挿入される。
XY軸テーブル36とZ軸テーブル38は、駆動装置40、42の駆動により、ベース22上の細胞等を含む三次元空間を移動領域として移動し、インジェクションピペット34を、例えば、インジェクションキャピラリ35がベース22上の細胞に挿入される挿入位置まで粗動駆動する粗動機構(三次元軸移動テーブル)として構成されている。
また、これらテーブル36,38は、移動テーブルとしての機能の他に、ナノポジショナとしての機能を備え、インジェクションピペット34を往復動自在に支持するととともに、インジェクションピペット34をその長手方向(軸方向)に沿って微動駆動するように構成されている。
具体的には、XY軸テーブル36とZ軸テーブル38には、ナノポジショナとして、図2に示す微動機構44が付加(内蔵)されている。図36は、図35のXY軸テーブル36,Z軸テーブル38に付加される微動機構の例を示す断面図である。
図36の微動機構44は、圧電アクチュエータの本体を構成するハウジング48を備え、略円筒状に形成されたハウジング48内には、ねじ軸50が挿通されているとともに、円筒状の圧電素子54、円筒状の間座56aがねじ軸50の外周側に収納されており、軸受58A、60Aが内輪間座62を間にしてねじ軸50にロックナット66Aにより固定されて収納されている。
軸受58A、60Aは、それぞれ内輪58a、60aと、外輪58b、60bと、内輪58a、60aと外輪58b、60b間に挿入されたボール58c、60cを備え、各内輪58a、60aがねじ軸50の外周面に内輪間座62を介して嵌合され、各外輪58b、60bがハウジング48の内周面に嵌合され、ねじ軸50を回転可能に支持する。軸受58Aは、ハウジング48の内周面に嵌合された間座56aとの当接により、圧電素子を介して蓋64を締め付けることによって予圧が付与される。ハウジング48の一端側には圧電素子に電圧を印加するための信号線を通すための孔48a、48bが形成されている。予圧調整は間座56aの長さを調整することによって押圧力を調整させ、軸受58A、60Aへ適切な予圧力を与える。これにより、軸受58A、60Aに所定の予圧が付与され、軸受58A、60Aの外輪間に軸方向間距離としての間隙63が形成される。
圧電素子54は、孔48a、48b内にそれぞれ挿入されたリード線70A、72Aを介して図35のコントローラ43に接続されており、コントローラ43からの電圧に応じてインジェクションピペット34の軸長手方向に沿って伸縮する圧電アクチュエータの一要素として構成されている。
圧電素子54は、コントローラ43からインジェクション用電圧が印加されると、インジェクションキャピラリ35に対しベース22上の細胞に挿入するための穿孔動作を行うようになっており、また、コントローラ43から微動用電圧が印加されると、ねじ軸50をその長手方向(軸方向)に沿って微動させて、インジェクションキャピラリ35の位置を微調整するようになっている。
なお、圧電素子54に対するインジェクション用電圧を設定するに際しては、操作対象の細胞の性質等に合わせて、電圧の振幅や電圧の波形を調整できるようになっている。また、図36では円筒型の圧電素子を使用しているが、これに限定されず、例えば角筒型であってもよい。
コントローラ43は、インジェクション用マニピュレータ16を駆動するときには、XY軸テーブル36とZ軸テーブル38を粗動駆動して、インジェクションピペット34の先端に装着されたインジェクションキャピラリ35をベース22上の細胞に近づけて位置決めした後、微動機構44を用いてインジェクションキャピラリ35を微動駆動するようになっている。
図35のコントローラ43は、例えば、演算手段としてのCPU(中央演算処理装置)及び記憶手段としてのRAM、ROMなどのハードウエア資源を備えたマイクロコンピュータで構成されており、所定のプログラムを基に各種の演算を行い、演算結果に従って駆動装置40、42等に駆動指令を出力するとともに、カメラ18で撮像した細胞の画像や演算結果に関する情報などをCRTや液晶パネルからなる表示部(パソコンディスプレイ)45の画面上に表示させる制御手段として構成されている。
図37は図35のコントローラ43の制御系要部を示すブロック図である。図38は図35,図37のジョイスティックの具体例を示す斜視図である。
図35のマニピュレータ16の駆動装置40、42には、粗動用モータとして、例えばステッピングモータ46(図37)が内蔵されており、ステッピングモータ46の回転がリニアガイドやボールねじ等により直線運動に変換されるように構成されている。図37のように、コントローラ43のCPU44Aは、粗動時にステッピングモータ46に対してドライバを介して(図示省略)駆動を指令し、また、微動時に圧電素子54に対してアンプ(図示省略)を介して駆動を指令する。
図35のマニピュレータ16における粗動と微動の駆動を切り換えるために、図1、図37のように、コントローラ43に接続されたジョイスティック47を用いる。
図37のコントローラ43のCPU44Aは、ジョイスティック47から操作方向に関する信号が入力すると、ジョイスティック47の操作方向を判別し、例えば、図38のようにジョイスティック47が中立位置でインジェクション用マニピュレータ16が停止した状態から、本体部(ハンドル)47eが操作者により掴まれて右側Rに倒されるように操作されたとき、ステッピングモータ46を駆動しインジェクションキャピラリ35を粗動駆動する。
また、図38のように、ジョイスティック47は、ハンドル479がバネ47jで支えられており、ハンドル479を左右方向に回転することで操作を指示する機構を有している。図37において、ハンドル479が右にひねられると、インジェクタはガラス針内が陽(陰)圧となるように駆動し、反対側へひねると逆の動作をする。
また、図38のように、ジョイスティック47は、その上部に並んで配置された第1及び第2押しボタンスイッチ47a,47bを備えたものとすることもできる。この場合、図38において、第1押しボタンスイッチ47aが押されてオンになると、圧電素子54を駆動し、インジェクションキャピラリ35が細胞に接近した位置で微小量の移動を行うことで細胞に対する穿孔動作を行うようになっている。また、第2押しボタンスイッチ47bが押されてオンになると、ステッピングモータ46を駆動し、インジェクションキャピラリ35を細胞内の位置から抜くように後退方向C(図39)に駆動するようになっている。また、第2押しボタンスイッチ47bの代わりに、第3押しボタンスイッチ47cを押すことで後退方向Cへの駆動を行わせるようにしてもよい。
上述のように、ジョイスティック47のハンドル479をひねる方向とインジェクタの駆動方向とは、使用するユーザの使いやすいように設定することができる。ジョイスティック47のハンドル479をひねることで、その位置情報をコントローラ43が読み取り、ゲインを乗じ速度指令に変換し、インジェクタに接続されたモータを駆動する。よって、ジョイスティック47のハンドル479を大きくひねれば、速い速度でインジェクタを駆動することが可能となる。このゲインはユーザの使いやすいように設定することができる。例えば、使い慣れていないユーザにはゲインを小さく設定し、ジョイスティック47のハンドル479を大きくひねってもさほど高速でインジェクタが駆動しないように設定すれば、操作中の誤動作を防止でき、かつ微量な調整も可能となる。
インジェクションガラス針内に細胞や精子を保持する操作が必要なとき、細胞や精子がシャーレ底に付着している場合があり、インジェクタの速度は常時可変できたり、陰圧・陽圧駆動の切り替えをすばやく行うことが必要である。このときはジョイスティック47のハンドル479をひねる大きさにより速度が可変でき、ひねる方向を切り替えることでインジェクタの駆動方向が切り替わるため、操作性よくハンドリング操作が可能となる。このように、1つの操作部(ハンドル)でマニピュレータ、インジェクタを操作できるため従来に比べ操作部を持ち代えるという煩わしさがない。また、ジョイスティックのハンドルをひねることで容易にインジェクタを駆動することができるため、ジョイスティックのハンドルを大きくひねっても微小にインジェクタを駆動するように設定し使用することで、手動で微小にハンドルを回転させる際に比べ操作の難しさを回避できる。
次に、図35~図38のマニピュレータシステム10の動作について図35~図39を参照して説明する。図39は、図35の顕微鏡ユニット12による顕微鏡視野を模式的に示し、卵子に対するインジェクションのための各ステップ(a)~(d)を説明するための図である。
図39(a)のように、ホールディング用マニピュレータ14を駆動し、ホールディングキャピラリ25によりベース22上の卵子Dを保持した状態で、図37,図38のジョイスティック47を右側Rに操作し、ステッピングモータ46を駆動し、インジェクションキャピラリ35の先端35aを卵子Dに接近させる。
次に、図39(b)のように、ジョイスティック47を左側Lに操作し、コントローラ43でステッピングモータ46を駆動し、インジェクションキャピラリ35の先端35aを卵子Dに当接させる。
次に、図39(c)のように、図37,図38のコントローラ43からインジェクション用電圧を印加して圧電素子54を駆動し、初期設定されたインジェクション用電圧の信号波形に基づいて圧電素子54によりインジェクションキャピラリ35が先端35aで穿孔動作を行い、インジェクションキャピラリ35の先端35aが前進方向Bに卵子Dの透明帯を通して卵子D内へと挿入され、インジェクションキャピラリ35から精子の入った溶液を注入する。
なお、圧電素子54による穿孔動作は、圧電素子54の駆動時間が卵子の個体差により異なるため、押しボタンスイッチ47aを押している間に継続して圧電素子54を駆動し、押しボタンスイッチ47aを離すと圧電素子54がオフとなる構成とすることが好ましい。
また、ハンドル479をひねる力の大きさ、ひねる速度により、インジェクタを駆動し、インジェクションキャピラリ35からの溶液の注入速度を可変とすることも可能である。この場合、遅い速度・弱い力でハンドル479をひねった場合は注入速度を遅くし、逆に速い速度・強い力でハンドル479をひねった場合は注入速度を早くすることが好ましい。また、操作途中でハンドル479の操作速度や操作力が変化した場合は、これに応じて注入速度を可変させることもできる。
次に、上述のインジェクション動作の後の操作のため、図39(d)のように、図37,図38のジョイスティック47は上部の第2押しボタンスイッチ47bを備えるものとすることもできる。第2の押しボタンスイッチ47bを押すと、ステッピングモータ46を駆動し、インジェクションピペット34の軸長手方向に沿って駆動して、後退方向Cにインジェクションキャピラリ35を駆動することで細胞D内から抜く。
上述のように、図35~図39の本実施形態によれば、圧電素子54による穿孔動作・インジェクション開始からインジェクションキャピラリ35を細胞(卵子D)から抜くまでの操作を一つのジョイスティックで行うことができ、ジョイスティック47の他の部分の操作の必要がなくなるうえにジョイスティック47のみで操作が可能となるので、全体として操作が容易になる。また、上記操作をひねる操作とすることで、初期設定した動作を安定して実行させることができ、このため、人為的な誤差が少なくなるとともに、各操作を安定して繰り返し行うことが可能となる。
また、押しボタンスイッチを使用する場合は、上記に加え、第1及び第2押しボタンスイッチ47a、47bがジョイスティック47の上部に並んでいるので、押しボタンスイッチ47a、47bを続けて押すことが簡単にでき、穿孔動作・インジェクション動作及びインジェクションキャピラリを抜く動作を連続的に正確かつ容易に行うことができる。
次に、上述のジョイスティック47による操作の代わりに、図35のマウス49を用いて表示部45の画面上で操作するように構成してもよい。すなわち、図40の表示部45の画面45a上に、例えば、図39のような顕微鏡視野の画像を表示するとともに、図35のマウス49でクリックすることでスイッチと同様の動作をする押しボタン41a~41eを表示する。これらの押しボタン41a~41eをマウス49で操作することで、図39(a)~(d)と同様の操作を行うことができる。
すなわち、画面45a上に表示された粗動ボタン41aをマウス49でクリックすることで、ステッピングモータ46を駆動し、図39(a)のように、インジェクションキャピラリ35の先端35aを卵子Dに接近させる。ここで、停止ボタン41bをクリックし停止してもよい。
次に、粗動ボタン41aをクリックしてステッピングモータ46を駆動し、図39(b)のように、インジェクションキャピラリ35を移動させて先端35aを卵子Dに当接させる。
次に、注入ボタン41dをクリックすると、インジェクション用電圧を印加して圧電素子54を駆動し、図39(c)のように、インジェクションキャピラリ35が先端35aで穿孔動作を行い、注入を行う。
次に、上述のインジェクション動作の後、後退ボタン41eをクリックすると、ステッピングモータ46を駆動し、図39(d)のように、インジェクションキャピラリ35を後退方向Cに駆動することで細胞D内から抜く。
なお、上述の図37~図39及び図40では、穿孔動作・インジェクション動作と、インジェクションキャピラリを抜く動作と、を2つの押しボタンにより別々に行うようにしたが、1つの押しボタンを押すことで、穿孔動作・インジェクション動作からインジェクションキャピラリを抜く動作まで自動的に連続して行うようにしてもよい。
以上のように本発明を実施するための最良の形態について説明したが、本発明はこれらに限定されるものではなく、本発明の技術的思想の範囲内で各種の変形が可能である。例えば、図38ではハンドル479のひねり操作や押しボタンスイッチ47a、47bを例にして説明したが、他の押しボタンスイッチに同様の機能を備えさせることが可能であり操作者が操作し易い他の押しボタンスイッチに同様の機能を割り振ることができる。
また、図35のマウス49として押しボタンスイッチを有するマウスを用いて、かかるマウス49に付属した押しボタンスイッチを押すことでジョイスティック47の第1及び第2押しボタンスイッチ47a、47bと同様の操作を行わせるように構成してもよい。この場合、粗動と微動の切り換えは、例えば、図40と同様の押しボタン41a,41b,41cにより行うようにしてもよい。
また、ジョイスティックやマウス以外のポインティングデバイスを用いてもよく、例えば、ペンタブレット等を使用してもよく、押しボタンが不足するときは、画面上にクリック可能な押しボタンを設置することが好ましい。
〈第9の実施形態〉
第9の実施形態によるマニピュレータシステム10は図35と同様の構成である。すなわち、マニピュレータシステム10は、図35のように、顕微鏡観察下で細胞等の微小対象物に微細な人工操作を実施するためのシステムとして、顕微鏡ユニット12と、ホールディング用マニピュレータ14と、インジェクション用マニピュレータ16とを備え、顕微鏡ユニット12の左右にマニピュレータ14,16が配置されている。顕微鏡ユニット12は、カメラ18、顕微鏡20、ベース22を備え、ベース22の上方に顕微鏡20が配置され、顕微鏡20にはCCDやCMOS等の撮像素子を用いたカメラ18が連結されている。ベース22上には細胞等の微小対象物が載置可能であり、ベース22上の細胞(図示せず)に顕微鏡20から光が照射される。ベース22上の細胞で反射した光が顕微鏡20に入射すると、細胞に関する光学像は、顕微鏡20で拡大された後、カメラ18で撮像され、カメラ18の撮像による画像を表示部45に表示し、細胞を観察できる。
なお、マニピュレータシステム10の各部は、図35と同様であるので、その説明は省略する。また、XY軸テーブル36とZ軸テーブル38には、ナノポジショナとして、微動機構44が付加(内蔵)されているが、この微動機構44は図36に示すものと同様であるので、その説明は省略する。
図43は第9の実施形態による図35のコントローラ43の制御系要部を示すブロック図である。図44は図43の表示部の分割された画面の例を示す図である。
図35のマニピュレータ16の駆動装置40、42には、粗動用モータとして、例えばステッピングモータ46(図37)が内蔵されており、ステッピングモータ46の回転がリニアガイドやボールねじ等により直線運動に変換されるように構成されている。図43のように、コントローラ43のCPU44Aは、粗動時にステッピングモータ46に対してドライバ(図示省略)を介して駆動を指令し、また、微動時に圧電素子54に対してアンプ(図示省略)を介して駆動を指令する。
図43の表示部45と、画像処理部80Aと、表示部45と画像処理部80Aとを制御するCPU44Aとにより、画像表示装置が構成される。すなわち、図43のCPU44Aは表示部45の画面表示形態を制御し、図44のように表示部45の画面45aを例えば画面81A,82Aの二画面に分割する。図1の顕微鏡20に設けられたカメラ18で撮像された顕微鏡画像が、各分割画面81A,82Aに細胞等の微小対象物の画像としてそれぞれ表示される。
カメラ18からの画像は、図43の画像処理部80Aで各種の画像処理が施されるが、例えば、微小対象物の顕微鏡画像を所望の倍率に縮小・拡大処理することができる。すなわち、画像処理部80Aは、入力画像について所定のアルゴリズムでソフト的に縮小処理または拡大処理を行い、縮小または拡大された出力画像とするようになっている。
図44のように、画像処理部80Aで拡大処理された例えば表示倍率10倍(×10)の顕微鏡画像が画面81Aに表示され、表示倍率40倍(×40)の同一の顕微鏡画像が画面82Aに表示される。
図45に図43のジョイスティックの具体例を示す斜視図を示す。図35,図43のようにコントローラ43に接続されたジョイスティック47を用いて、例えば、図44のようにジョイスティック47が中立位置でインジェクション用マニピュレータ16が停止した状態から、本体部47eが操作者により掴まれて右側Rまたは左側Lに操作されたとき、ステッピングモータ46を駆動しインジェクションキャピラリ35を粗動駆動する。
また、図45のように、ジョイスティック47は、その上部に並んで配置された第1及び第2押しボタンスイッチ47a,47bを備え、第1押しボタンスイッチ47aが押されてオンになると、圧電素子54を駆動し、インジェクションキャピラリ35が細胞に接近した位置で微小量の移動を行うことで細胞に対する穿孔動作を行う。また、第2押しボタンスイッチ47bが押されてオンになると、ステッピングモータ46を駆動し、インジェクションキャピラリ35を細胞内の位置から抜くように後退方向C(図39)に駆動する。なお、この動作についてはジョイスティック47のハンドル479をひねることで動作指示されるようにしてもよい。
なお、図45のようにジョイスティック47の上部に設置されたハットスイッチ47dを用いて、第2押しボタンスイッチ47bの上記ボタン操作を代用するように構成してもよい。また、図45の押しボタンスイッチ47aの隣の第3押しボタンスイッチ47c等の他の押しボタンスイッチに同様の機能を備えさることが可能であり、操作者が操作し易い他の押しボタンスイッチに同様の機能を割り振るようにしてもよい。
次に、本実施形態のマニピュレータシステム10の動作について図43~図45、さらに上述の図39を参照して説明する。
図39(a)のように、ホールディング用マニピュレータ14を駆動し、ホールディングキャピラリ25によりベース22上の卵子Dを保持した状態で、図43,図45のジョイスティック47を右側Rに操作し、ステッピングモータ46を駆動し、インジェクションキャピラリ35の先端35aを卵子Dに接近させる。
次に、図39(b)のように、ジョイスティック47を左側Lに操作し、コントローラ43でステッピングモータ46を駆動し、インジェクションキャピラリ35の先端35aを卵子Dに当接させる。
次に、図39(c)のように、図45のジョイスティック47の上部の第1押しボタンスイッチ47aを押すと、コントローラ43からインジェクション用電圧を印加して圧電素子54を駆動し、初期設定されたインジェクション用電圧の信号波形に基づいて圧電素子54によりインジェクションキャピラリ35が先端35aで穿孔動作を行い、インジェクションキャピラリ35の先端35aが前進方向Bに卵子Dの透明帯を通して卵子D内へと挿入され、インジェクションキャピラリ35から精子の入った溶液を注入する。
なお、圧電素子54による穿孔動作は、圧電素子54の駆動時間が卵子の個体差により異なるため、押しボタンスイッチ47aを押している間に継続して圧電素子54を駆動し、押しボタンスイッチ47aを離すと圧電素子54がオフとなる構成とすることが好ましい。
次に、上述のインジェクション動作の後、図39(d)のように、図45のジョイスティック47の上部の第2押しボタンスイッチ47bを押すと、ステッピングモータ46を駆動し、インジェクションピペット34の軸長手方向に沿って駆動して、後退方向Cにインジェクションキャピラリ35を駆動することで細胞D内から抜く。
上述のように、本実施形態によれば、圧電素子54による穿孔動作・インジェクション開始からインジェクションキャピラリ35を細胞(卵子D)から抜くまでの操作を押しボタンスイッチ47a、47bの押す動作だけで実行することができ、ジョイスティックのレバー操作の必要がなくなり、操作が容易になる。また、上記操作をボタン操作とすることで、初期設定した動作を安定して実行させることができ、このため、人為的な誤差が少なくなるとともに、各操作を安定して繰り返し行うことが可能となる。
また、第1及び第2押しボタンスイッチ47a、47bがジョイスティック47の上部に並んでいるので、押しボタンスイッチ47a、47bを続けて押すことが簡単にでき、穿孔動作・インジェクション動作及びインジェクションキャピラリを抜く動作を連続的に正確かつ容易に行うことができる。
上述の図39(a)~(d)の各操作の際に、図44のように、表示部45の2分割された画面81A,82Aに、同一の顕微鏡画像について低倍率の画像と高倍率の画像を表示しながら、低倍率画像で細胞Dの状態を把握しながら高倍率画像で細胞Dに対する微細な各操作を実行できる。例えば、図39(b)の操作の際に、図10のように2分割された画面81A,82Aに低倍率画像と高倍率画像を表示し、ジョイスティック47を操作して、画面81Aの低倍率画像で細胞Dの全体を把握し、画面82Aの高倍率画像をみながらインジェクションキャピラリ35の先端35aを卵子Dに当接させることができる。
以上のように、本実施形態のマニピュレータシステム10によれば、マニピュレータ14,16で細胞等の微小対象物を操作する際、顕微鏡画像の集録を1つのカメラ18で行い、例えば、PC(パソコン)等に集録することができる。集録した顕微鏡画像を表示部45の2画面81A,82Aに分けて異なる表示倍率で表示でき、例えば、画面81Aでは表示倍率が10倍であり、画面82Aでは表示倍率が40倍である。これにより、常に低倍率画像で顕微鏡下の試料状態を把握しながら高倍率画像での微細な操作が可能になる。また、顕微鏡の対物レンズを交換する手間が省略できるとともに、高倍率の対物レンズが不要となる。さらに、顕微鏡で電動レボルバ等の高価な製品を使用しなくてもよく、マニピュレータシステム全体のコスト減に寄与できる。
以上のように本発明を実施するための最良の形態について説明したが、本発明はこれらに限定されるものではなく、本発明の技術的思想の範囲内で各種の変形が可能である。例えば、図44の画面81A,82Aにおける表示倍率は、変更可能であり、例えば、一方をほぼ等倍とし、他方をデジタルズームによる所望の倍率にできる。また、表示部45の分割画面は、2画面に限定されず、さらに、3画面、4画面、のように多分割にしてもよい。
〈第10の実施形態〉
図46は第10の実施形態によるマニピュレータシステムの概略的構成を示す斜視図である。図47は図46のインジェクション用電動3軸マニピュレータの概略的構成を示す斜視図である。
図46は、図35のマニピュレータシステム10をより具体化したマニピュレータシステム500を示している。すなわち、図46のように、本実施形態によるマニピュレータシステム500は、ホールディング用の電動3軸(XYZ)マニピュレータ140と、インジェクション用の電動3軸(XYZ)マニピュレータ160と、倒立顕微鏡120Aと、電動の試料ステージ110と、を備え、各電動3軸マニピュレータ140,160は倒立顕微鏡120Aと一体になるように取り付けられている。なお、電動3軸マニピュレータ140,160は、試料ステージ110と一体構造となるように取り付けてもよく、これにより外部からの振動等の影響が受け難くなる。
インジェクション用の電動3軸マニピュレータ160には、電動で圧力調整可能なインジェクタ340を設置軸方向に往復運動するようにモータ駆動及び圧電素子駆動が可能なナット回転型アクチュエータ170が取り付けられている。ホールディング用の電動3軸マニピュレータ140にも同様のナット回転型アクチュエータ191が取り付けられている。
倒立顕微鏡120Aは電動焦点合わせアクチュエータ、対物レンズを切り替えるレボルバ部及び観察対象物への光照射のための光源を有する。
また、各電動3軸マニピュレータ140,160の設置時の安定性を向上するため、各電動3軸マニピュレータ140,160を重力方向に支持するための脚149,169を設置している。各脚149,169は、図46では各電動3軸マニピュレータ140,160に対しそれぞれ1箇所しか配置していないが、複数でもよい。
図47のように、電動3軸マニピュレータ160は、3つの1軸アクチュエータ161,162,163を3軸(XYZ)方向に組み合わせて構成されている。各1軸アクチュエータ161~163は、ステッピングモータとカップリングとBS(ボールねじ)と案内要素とスライダとから構成され、オーバーストロークを防止するために駆動軸方向の両端にリミットスイッチが設置されている。また、各1軸アクチュエータ161~163のステッピングモータの励磁を切ることにより、各1軸アクチュエータ161~163の各手動ノブ161a,162a,163aによりマニピュレータ160を各軸方向に手動操作することも可能な構成となっている。電動3軸マニピュレータ140も同様に構成されている。
1軸アクチュエータ163をZ軸方向の駆動用とし、そのZ軸スライダ163b上にはθステージ164が配置され、さらにθステージ164上にはナット回転型アクチュエータ170が配置されている。θステージ164は、ナット回転型アクチュエータ170の設置角度を調整するためのものであり、手動タイプであるが、電動タイプに構成してもよい。θステージ164の設置角度は、インジェクタ340に装着されるガラス製のインジェクションキャピラリ341の折れ曲がり角度またはインジェクション角度と一致するよう設定される。
次に、図46,図47のナット回転型アクチュエータ170について図48,図49を参照して説明する。図48は図47のナット回転型アクチュエータ170をθステージ164の平面と平行な方向に切断してみた断面図である。図49は図47,図48のナット回転型アクチュエータ170の斜視図である。
図48,図49に示すように、ナット回転型アクチュエータ170は、圧電アクチュエータとしての本体を構成するハウジング480を備えており、ほぼ筒状に形成されたハウジング480内には、ピペット状のインジェクタ340を駆動対象として、外周側にねじ部を有するねじ軸520と、ねじ軸520を囲む中空状の回転軸540が挿通されている。ハウジング480はその底部がベース560に固定されており、微動機構、ナノポジショナとして構成されている。
ねじ軸520の先端側には、治具580を介してピペット状のインジェクタ340の根元側が連結されており、ねじ軸520の中程には、ねじ軸520外周のねじ部とねじ結合されるねじ要素としてのボールねじナット(BSナット)600が装着され、治具580とねじ軸520との間にはスライダ620が連結されている。スライダ620はベース560とほぼ直交する方向に配置され、切り欠き640を間にしてリニアガイド660に連結されている。リニアガイド660はベース560底部側に配置され、ベアリング680を介して、ねじ軸520の軸方向に沿って移動自在にベース560に連結されている。
すなわち、リニアガイド660は、ねじ軸520の軸方向の移動に合わせて、ねじ軸520の先端側を支持したスライダ620を、ベース560に沿って往復動させるようになっている。この際、ねじ軸520のうちボールねじナット600よりもインジェクタ340側の部位が、スライダ620を介してリニアガイド660でスライド自在に支持されるので、ねじ軸520の直線運動をインジェクタ340へ伝達することができる。
ボールねじナット600は、回転軸540の軸方向一端側(先端側)の段部540aに固定されているとともに、ねじ軸520外周のねじ部とねじ結合され、ねじ軸520がその軸方向に沿って往復動(直線運動)するのを自在に支持するようになっている。すなわち、ボールねじナット600は、回転軸540の回転運動をねじ軸520の直線運動に変換するための要素として構成されている。
回転軸540の軸方向他端側は、中空モータ700内の回転部に連結している。中空モータ700のハウジング740は、その底部側がベース560に弾性体としてのゴムワッシャ760を介してボルト780が固定されている。中空モータ700が駆動されると回転軸540が回転し、回転軸540の回転運動がボールねじナット600を介してねじ軸520に伝達され、ねじ軸520がその軸方向に沿って直線運動するようになっている。
一方、回転軸540の段部540aに隣接して、軸受800、820が内輪間座840を間にして収納されている。軸受800、820は、それぞれ内輪800a、820aと、外輪800b、820bと、内輪と外輪間に挿入されたボール800c、820cを備え、各内輪800a、820aが回転軸540の外周面に嵌合され、各外輪800b、820bがハウジング480の内周面に嵌合され、回転軸540を回転自在に支持するようになっている。軸受800、820は、内輪間座840を間にし、回転軸540にロックナット860により固定されている。軸受800は、ハウジング480内の段部540aと円環状のスペーサ900と当接することにより、回転軸540の軸方向への移動が規制されるようになっている。軸受820の外輪820bとハウジング480の蓋880との間に、円環状の圧電素子920と円環状のスペーサ900が圧入されている。
また、各軸受800、820、圧電素子920は、スペーサ900の長さを調節し、蓋880を閉めることにより、予圧が付与される。具体的には、スペーサ900の長さを調整し、蓋880を閉めると、その位置に応じた締結力が軸受820と軸受800の外輪820b、800bに、軸方向に沿った押圧力として予圧が付与されるとともに、同時に圧電素子920にも予圧が付与される。これにより、軸受800、820および圧電素子920に所定の予圧が付与され、軸受800、820の外輪間に軸方向間の距離としての間隙940が形成される。
圧電素子920は、リード線(図示せず)を介してコントローラとしてのパソコン(PC)430(図51参照)に接続されており、パソコン430からの電圧に応じて回転軸540の長手方向(軸方向)に沿って伸縮する圧電アクチュエータの一要素として構成されている。すなわち、圧電素子920は、パソコン430からの印加電圧に応答して、回転軸540の軸方向に沿って伸縮し、回転軸540をその軸方向に沿って微動させるようになっている。回転軸540が軸方向に沿って微動すると、この微動がねじ軸520を介してインジェクタ340に伝達され、インジェクタ340の位置が微調整されることになる。
上述のように、ナット回転型アクチュエータ170は、中空モータ700によりボールねじナット600の回転運動をねじ軸520の直線運動に変換しねじ軸520を直動するが、ねじ軸520に取り付けられたインジェクタ340は、中空モータ700の駆動時にリニアガイド660により回転せず、回り止めの機能を有している。このため、中空モータ700の駆動によりインジェクタ340が直線往復運動できる。
図48,図49のナット回転型アクチュエータ170は、中空モータ700を駆動することで、インジェクタ340を駆動し顕微鏡視野中央部ヘセットし、また、顕微鏡視野中央部から退避する機能を有し、圧電素子920を駆動することで、インジェクタ340の先端に取り付けたガラスキャピラリ341(図47)による細胞(卵)に対する穿孔動作をアシストすることができる。
次に、図46の試料ステージ110について図50を参照して説明する。図50は、図46の試料ステージ110を示す斜視図である。図50のように、試料ステージ110は、2つの1軸アクチュエータ111,112が2軸方向に配置され、試料台113を2軸方向に移動させるように構成され、図46の倒立顕微鏡120Aに取り付けられている。試料ステージ110を駆動する各アクチュエータ111,112の各モータの軸端には手動ノブ111a,112aがそれぞれ取り付けられており、各モータの励磁を切ることにより手動操作も可能となっている。
次に、図46のマニピュレータシステム500を制御するコントローラとしてのパソコンについて図51を参照して説明する。図51は、図46~図50のマニピュレータシステム500についてのパソコンによる制御系を説明するための要部ブロック図である。
図51のパソコン(パーソナルコンピュータ)430は、各種制御を行うCPU(中央演算処理装置)431と、記憶装置に格納されておりマニピュレータシステム500の使用時に読み出されるプログラム432と、液晶パネルやCRT等からなる表示部433と、ハードディスクや光ディスク等の記録媒体に顕微鏡画像等を保存可能な記憶部430aと、インターネット等のネットワークを介して外部との通信のインターフェースである通信部430bと、を備える。また、操作者により操作されるジョイスティック470及びマウス470aは、パソコン430にネットワークを介して接続可能な別のパソコンへの入力手段である。パソコン430は、CPU431によりプログラム432の動作及びネットワークを介して外部から通信部430bで受信したジョイスティック470やマウス
470aの各操作による操作信号に基づいてマニピュレータシステム500の各部分を制御する。
すなわち、パソコン430は、信号発生器438を駆動し、その信号によりピエゾアンプ434を介してナット回転型アクチュエータ170のピエゾ素子からなる圧電素子920を駆動する。また、パソコン430は、端子台ボックス435を介してナット回転型アクチュエータ170と電動3軸マニピュレータ140,160と試料ステージ110と顕微鏡120Aのハンドルを電動で回転させる焦点合わせアクチュエータ436とにそれぞれ電気的に接続されており、ナット回転型アクチュエータ170の中空モータ700、電動3軸マニピュレータ160の各1軸アクチュエータ161~163、試料ステージ110の各1軸アクチュエータ111,112及び焦点合わせアクチュエータ436がそれぞれ駆動されるようになっている。また、顕微鏡120Aに関し、対物レンズのレボルバ部や光源の光量調整も電動駆動するようにしてもよい。
また、マニピュレータ160には、インジェクタ340の圧力調整を行うシリンジモータが含まれ、そのモータが同様に駆動制御されることでシリンジの圧力を調整することができる。また、顕微鏡120Aには撮像素子から構成されたカメラ437が配置されており、カメラ437により撮像された顕微鏡画像がパソコン430の表示部433に表示される。
また、ホールディング用のマニピュレータ140も同様に駆動されるが、マニピュレータ140にはホールディングキャピラリの圧力(陰圧)調整を行うシリンジモータが含まれ、そのモータが同様に駆動制御されることでシリンジの圧力(陰圧)を調整することができる。
次に、図51のジョイスティックについて図52を参照して説明する。図52は、図51のジョイスティックの例を示す斜視図である。
上述のマニピュレータシステム500は、少なくとも2つのジョイスティック470を使用して操作される。ジョイスティック470は、一例として図52に示すようなハンドル479と複数のボタン471~477が配置されたものを使用する。
図52のジョイスティック470のハンドル479と複数のボタン471~477によりマニピュレータシステム500において次の表1に例示するような操作を実行できるようになっている。ホールディング側のジョイスティック470のハンドル479は、右方向R、左方向Lに傾斜させる(倒す)ことでマニュピレータ140,160をX軸方向、Y軸方向に駆動でき、回転させる(ひねる)ことでZ軸方向に駆動できる。また、インジェクション側のジョイスティック470は、第一の実施形態と同様に、ハンドル479をひねることでインジェクション動作の制御とすることもできる。なお、表1において、4方向のハットスイッチ477の「⇔」は、左右方向の2つのスイッチであり、同じく「↓↑」は、上下方向の2つのスイッチである。また、陰圧+、圧力+は各シリンジモータに
よる圧力絶対値の増加、陰圧-、圧力-は圧力絶対値の減少である。微動駆動Z+、-は、Z軸方向に対する移動量の増加、減少である。
なお、表1のようなハンドル479と複数のボタン471~477の各操作に対するレイアウトは、操作者が使い易いように適宜変更が可能である。また、細胞操作で圧電素子920を駆動する際、複数のパラメータで駆動する必要が生じる可能性があるが、その場合は、同様のボタンを追加等することにより対応できる。
また、使用するジョイスティック470は、ハンドル479を倒す(傾斜させる)度合いに応じて速度調整し、離すとマニピュレータ140,160の駆動を停止するタイプでもよいし(速度指令型)、ハンドル479を倒した分だけマニピュレータ140,160を駆動するタイプでもよい(位置制御型)。また、上述のような操作に用いるインターフェイスは、ジョイスティック以外に、例えば、図51のマウス470aとして複数ボタンが存在する2次元または3次元マウスを使用してもよい。
次に、パソコン430の表示部433に表示されるコントローラ画面について図53を参照して説明する。図53は図51のパソコン430の表示部433に表示されるコントローラ画面の一例を示す図である。
パソコン430の表示部433のコントローラ画面上には、上述の図44と同様にカメラ437による顕微鏡画像を少なくとも2画面で表示するようになっており、例えば、図53のように、顕微鏡画像を第1表示画面433aに標準倍率で、第2表示画面433bに拡大倍率でそれぞれ表示できるようになっている。図53の例では、マニピュレータシステム500で卵Dが操作され、ガラス製のホールディングキャピラリ342に陰圧で保持された卵Dに対しインジェクタ340の先端のインジェクションキャピラリ341が穿孔動作した状態を第1表示画面433aに標準倍率で表示し、第2表示画面433bに拡大倍率で表示している。これにより、図10と同様に低倍率の顕微鏡画像と高倍率の顕微鏡画像とを参照するとき、顕微鏡画像の表示倍率の変更の必要性がなくマニピュレータシステム500による迅速な操作処理が可能となるとともに、常に標準倍率の画像で顕微鏡下の細胞(卵)等の試料の状態を把握しながら、拡大倍率の画像で微細な操作を行うことができる。
表示部433のコントローラ画面には、図53に示すように、略中央左右に第1,第2表示画面433a,433bが配置されるとともに、その下側に動作状態表示パネル433cが配置され、その上側には、画像操作パネル433d,試料ステージ操作パネル433e及びマニピュレータ操作パネル433fが配置されており、マウス470aによりそれぞれ操作が可能になっている。
動作状態表示パネル433cには、マニピュレータ140,160の実際のXYZ位置座標等が表示部433gに表示され、また、ジョイスティック470のボタン操作時に、どのボタンを押しているかを認識可能な表示部433hが配置されており、画像をみながら操作状態を把握することができ、さらに、マニピュレータ140,160の電動・手動の切り替え部433i及び休止ボタン433jが配置されている。
また、画像操作パネル433dには、第1,第2表示画面433a,433bにおける画像の倍率メニュー433k及び画像の表示位置メニュー433mが配置されており、操作者が画像の倍率や表示位置を調整可能となっている。また、顕微鏡画像はコントローラ画面上でのマウス470aによる操作で記憶部430aに保存でき、また、コントローラ画面上のボタンを押すことで、動画保存も可能である。
また、試料ステージ操作パネル433eには、試料ステージ110の駆動パラメータを調整するメニュー433nに加えて、XY駆動、原点復帰等操作が可能なボタンが配置されている。試料ステージ110は表示画面433a,433b上の顕微鏡画像を見ながらボタン操作により駆動できる。例えば、ボタンを押している間だけ+X方向に動かすことができる。
また、マニピュレータ操作パネル433fには、マニピュレータ140,160の駆動パラメータを調整するメニュー433pがあり、操作者が好みのパラメータに設定して使用することができる。また、マニピュレータ操作パネル433fには、図47~図49のナット回転型アクチュエータ170を駆動するボタン433qが配置されている。このボタン433qを押すことで、予め設定したストロークでナット回転型アクチュエータ170が駆動し、インジェクタ340を顕微鏡中心部ヘセットし、また、退避させることができる。
なお、ナット回転型アクチュエータ170及び試料ステージ110は、上述のように図53のコントローラ画面上のボタン操作により行うことができるが、ジョイスティック470等で行うようにしてもよい。
特許文献4のような従来のマニピュレータシステムによれば、顕微鏡設置場所にジョイスティック等を設置し、接眼レンズを操作者がのぞきながら操作するが、このような操作では、ジョイスティックの操作を目視しないまま行わざるを得ないので、使用するには熟練した技術が必要となるのに対し、上述のマニピュレータシステム500によれば、表示部433のコントローラ画面をみながらジョイスティック470の操作も目視できるとともに、コントローラ画面にもジョイスティック470の操作状態が表示されるので、マニピュレータシステム500を簡単かつ確実に使用することができる。
〈第11の実施形態〉
次に、第11の実施形態による遠隔操作可能なマニピュレーションシステムについて図54を参照して説明する。図54は、第11の実施形態によるネットワークを介して遠隔操作可能なマニピュレーションシステムを説明するための概念図である。
図54に示すように、本実施形態によるマニピュレーションシステム901は、ネットワーク通信により上述のマニピュレータシステム500を遠隔操作可能に構成したものである。
マニピュレーションシステム901では、マニピュレータシステム500及びコントローラとしてのパソコンPC1を端子台ボックス435の各コネクタに接続する。PC1は、図51のパソコン430と同じであってよいが、図54ではマニピュレータシステム500の制御のためのプログラム(1)がインストールされている。
さらに、マニピュレーションシステム901では、図54のように、遠隔操作のためのパソコンPC2を別途用意し、PC1とともにネットワークNに接続可能にする。ネットワークNとしては、インターネットであってよいが、専用回線や特定領域に設けられたネットワーク等であってもよい。
遠隔操作のためのパソコンPC2は、インターネット等のネットワークNを介して外部との通信のインターフェースである通信部PC21と、液晶パネルやCRT等からなり顕微鏡画像や制御プログラムとしてのコントロール画面をWebページで表示可能な表示部PC22と、各種制御を行う中央演算処理装置(CPU)PC23と、を備え、操作者により操作されるインターフェイスPC24が指令入力手段として接続されている。
パソコンPC2は、ネットワークNを介してPC1と接続し、図54の通信AによりPC1から送信された画像情報及びコントローラ情報を受信し、表示部PC22に顕微鏡画像や制御プログラム画面を表示するとともに、通信BによりPC1に対しインターフェイスPC24から入力されたインターフェイス情報を送信し、PC1は受信したインターフェイス情報に基づいてマニピュレータシステム500を操作する。
インターフェイスPC24は、例えば、ジョイスティック470(図51,図52)やマウス470a(図17)であってよく、ジョイスティック470の場合は、図18のハンドル479と複数のボタン471~477を上述の表1と同様の操作に割り当てることができる。
図54のマニピュレーションシステム901における遠隔操作について説明する。まず、図46のマニピュレータシステム500に、マニピュレータ操作に必要なインジェクションキャピラリ341(図47,図53)、ホールディングキャピラリ342(図53)やサンプルの入ったシャーレ等をセッティングすることで、マニピュレーションを実行できる状態とする。
次に、PC1及びPC2を起動しネットワークNを介して接続するとともに、図54のPC1でマニピュレータシステム500を駆動するためのプログラム(1)を起動する。起動したプログラム(1)自体を遠隔操作するため、PC1からネットワークNを介してPC2にコントローラ情報が送信されると、PC2の表示部PC22にWebページによる制御プログラム画面が表示される。また、カメラ437で撮像した顕微鏡画像情報がPC1からネットワークNを介してPC2に送信されて表示部PC22に表示される。このような構成でプログラム(1)を実行すると、PC2に接続しているインターフェイスPC24からの指令入力信号によりマニピュレータシステム500を制御でき、かつ、PC1上で起動しているプログラム(1)はPC2上に開いたWebページ内に表示されて制御可能となっているため、マニピュレータシステム500の全ての操作をPC2上で行うことができる。このようにして、PC2によりマニピュレータシステム500を遠隔操作することができる。なお、PC2の表示部PC22の制御プログラム画面(コントローラ画面)は図53のような画面表示の構成であってよいが、図53の例に限定されるものではない。
図55により図54の変形例を説明する。図55のように、PC2にはインターフェイスPC24からの信号でマニピュレータシステム500を制御するためのプログラム(2)がインストールされており、プログラム(2)を起動し、PC2でインターフェイスPC24から指令入力信号を入力すると、プログラム(2)でインターフェイス情報をPC1に送信し、PC1のプログラム(1)がネットワークN経由でプログラム(2)から送信されたインターフェイス情報を読み取ることで、マニピュレータシステム500の全ての操作をPC2上で行うことができる。
次に、本実施形態による遠隔操作可能なマニピュレーションシステムの別の例について図56を参照して説明する。図56は、第11の実施形態によるネットワークを介して遠隔操作可能なマニピュレーションシステムの別の例を説明するための概念図である。
図56に示すマニピュレーションシステム902は、図54と比べて、画像情報通信のために別のプログラムにより通信するものである。すなわち、上述の図54では、プログラム(1)に顕微鏡からの顕微鏡画像を表示するプログラムが内蔵された構成であるため、ネットワーク通信の方法等によっては、プログラム(1)によるコントロール画面(制御プログラム画面)をWebページで表示しコントロール画面上で制御し画像情報を転送する際に、通信するデータ容量が大きくなってしまう。そこで、図56のように、画像情報通信用にPC1,PC2に別途ポートを設置し、画像情報をPC1にインストールしたプログラム(3-1)及びPC2にインストールしたプログラム(3-2)によりネットワーク通信Fにより通信する。また、PC2からPC1へのインターフェイス情報及びP
C1からPC2へのコントローラ情報はネットワーク通信Gにより図54と同様に通信する。
図54のマニピュレーションシステム902によれば、PC2でマニピュレータシステム500を遠隔操作する際に、画像情報の通信が円滑になり、かつ、マニピュレータ操作時の通信におけるタイムラグを低減することができる。
図57により図56の変形例を説明する。図57の例は、図56においてPC2にインターフェイスPC24からの信号でマニピュレータシステム500を制御するためのプログラム(2)を図55と同様にインストールしたものである。本実施形態のその他の例として、図55のプログラム(2)内に画像情報通信のためのプログラムを挿入し使用するようにしてもよく、これによって、マニピュレータシステム500を駆動するためのWebページ上の操作に対する負荷を低減することができる。
以上のように、図54~図57のマニピュレーションシステム901,902によれば、マニピュレータシステム500を遠隔操作することができるので、マニピュレータシステム500をクリーンベンチ内で使用する場合に、操作者は、操作者の上肢をクリーンベンチ内に入れて操作する必要がなくなり、また、クリーンルームで作業する必要がある場合に、操作者はクリーンスーツを着てインジェクション作業する必要がなくなり、このため、操作者に対する負担を軽減できる。また、制約された環境下でマニピュレータシステム500を使用して作業する場合にも、マニピュレータシステム500を遠隔操作することで、かかる制約された環境下でもマニピュレータシステム500を使用できる。また、距離的に遠く離れた場合でもPC1,PC2がネットワークに接続可能であれば、遠隔操
作が可能となる。
また、熟練した技術者がマニピュレータシステム500の傍にいなくてもインジェクション操作することが可能になり、マニピュレータシステム500が設置されている場所に操作者がいる必要がなく、他の者がインジェクションキャピラリ341やホールディングキャピラリ342やサンプルの入ったシャーレ等の準備のみすれば、操作可能となる。
〈第12の実施形態〉
図58は第12の実施形態によるマニピュレータシステムについての制御系を説明するための要部ブロック図である。図59は図58のマニピュレータシステムで使用可能なワイヤレスインターフェイスの例を示す平面図である。
第12の実施形態によるマニピュレータシステムは、図46~図50と同様の構成であるが、マニュピレータの操作手段としてワイヤレスのインターフェイスを用いたものである。すなわち、図58のように、本実施形態によるマニピュレータシステム501は、インジェクション用マニピュレータ160を主に操作するための操作信号をワイヤレスで送信する第1ワイヤレス操作部430d及びホールディング用マニピュレータ140を主に操作するための操作信号をワイヤレスで送信する第2ワイヤレス操作部430eを備える。パソコン430は、第1ワイヤレス操作部430d及び第2ワイヤレス操作部430eからの操作信号を受信する受信部430cを備え、かかる受信した操作信号に基づいてマニピュレータシステム501の各部分を制御する。各ワイヤレス操作部430d,430eは電波や赤外線により無線で操作信号を送信する。
第1ワイヤレス操作部430d及び第2ワイヤレス操作部430eとして、例えば、図59のようなワイヤレスのポインタ及びマウスが一体となったワイヤレスインターフェイスを使用する。図59のワイヤレスインターフェイスは、マウス機能とポインタ機能とを有し、手動されるクリック部KRと複数のボタン部BTとを備え、机上で使用するときにはマウス機能を有し、空中で操作してもポインタ機能を有するようになっている。マウス機能時は光学センサで機能し、空中操作時はワイヤレスインターフェイス中のジャイロセンサ等が機能し操作可能となる。マニピュレータ140,160を使用するときは、ポインタ機能により手動で発生する操作信号をパソコン430が受信し検知し、マニピュレータ140,160を操作する。試料ステージ110を駆動する場合は、図59のワイヤレスインターフェイスを机上に置き、マウス機能を使用し操作する。その他のマニピュレータシステム501内のアクチュエータやインジェクタは複数のボタン部BUを用いて操作する。
パソコン430は、図59のワイヤレスインターフェイスの使用状態を検知し、現状どちらのモード(机上、空中)で操作しているかを判断し、また、ポインタ機能によるポインタの位置を認識しその位置に従ってマニピュレータシステム501を駆動する。操作者はポインタを表示部433に表示された画像上に置き、任意に動かして操作する。
なお、ポインタの小さな動きを検知し、誤動作を招く可能性があるため、操作時は、ワイヤレスインターフェイス中のボタンを押している間だけ、マニピュレータシステム501を駆動可能にして操作することが好ましい。また、図59のワイヤレスインターフェイスにおいてボタン部BUの個数を必要に応じて増やすことで、マニピュレータシステム501における各種の操作が可能となる。また、図59のワイヤレスインターフェイスは一例であり、インターフェイスの形状、種類は問わず、他の形状・種類のものを使用できる。
第1ワイヤレス操作部430d及び第2ワイヤレス操作部430eを図59のワイヤレスインターフェイス1個で構成してもよく、この場合、図59のワイヤレスインターフェイスを空中で操作する場合はインジェクション用マニピュレータ160を駆動し、机上で操作する場合はホールディング用マニピュレータ140を駆動するように使用してもよい(逆でもよい)。
第1ワイヤレス操作部430d及び第2ワイヤレス操作部430eを2個のワイヤレスインターフェイスから構成した場合、各ワイヤレスインターフェイスをインジェクション用、ホールディング用として使用するが、折衷で操作するようにしてもよく、この場合は空中で使用する場合はマニピュレータ駆動、机上で使用する場合は試料ステージ110等のアクチュエータを駆動するように使用してもよい(逆でもよい)。
また、顕微鏡画像を表示部433上に映し出し、図44や図53のように、顕微鏡画像を標準倍率、拡大倍率の2種類を表示し、各画像上にポインタを当てて操作する際、各画像に対するマニピュレーションシステムの速度ゲインを設定するようにしてもよい。その結果、標準倍率の画像上にポインタを当てたときのマニピュレータの駆動よりも、拡大倍率の画像上にポインタを当てたとのマニピュレータの駆動を細かく操作できる。
本実施形態によれば、表示部433上に映し出された顕微鏡画像を見ながら、操作者が操作し易い姿勢・位置でマニピュレータシステム501を操作することができ、操作者への負担を軽減できる。また、顕微鏡120Aの近くで操作する必要がないため、操作者が操作する際に顕微鏡へ伝わる振動を軽減でき、振動に起因する顕微鏡120Aへの悪影響を抑えることができる。
なお、本発明は、本明細書に記載の実施形態に限定されるものではなく、他の実施形態や変形例を含むことは、本明細書に記載された実施形態や技術的思想から本分野の当業者にとって明らかである。
また、本実施形態におけるジョイスティック47,147,470は、ワイヤレスの構成としてもよい。
また、本実施形態におけるキャピラリ,ガラスキャピラリ,インジェクションキャピラリは、同じものでよいが、違うものであってもよい。同様に、キャピラリ,ホールディングキャピラリは、同じものでよいが、違うものであってもよい。また、微小対象物と微小操作対象物は、同じものでよいが、違うものであってもよい。
また、第1~第12の実施形態のうちのいずれか2つまたはそれ以上の実施形態を組み合わせてもよいことはもちろんである。