WO2010143586A1 - 磁気共鳴イメージング装置及び渦電流補償方法 - Google Patents
磁気共鳴イメージング装置及び渦電流補償方法 Download PDFInfo
- Publication number
- WO2010143586A1 WO2010143586A1 PCT/JP2010/059501 JP2010059501W WO2010143586A1 WO 2010143586 A1 WO2010143586 A1 WO 2010143586A1 JP 2010059501 W JP2010059501 W JP 2010059501W WO 2010143586 A1 WO2010143586 A1 WO 2010143586A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- magnetic field
- eddy current
- gradient magnetic
- compensation
- phase
- Prior art date
Links
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/48—NMR imaging systems
- G01R33/54—Signal processing systems, e.g. using pulse sequences ; Generation or control of pulse sequences; Operator console
- G01R33/56—Image enhancement or correction, e.g. subtraction or averaging techniques, e.g. improvement of signal-to-noise ratio and resolution
- G01R33/565—Correction of image distortions, e.g. due to magnetic field inhomogeneities
- G01R33/56518—Correction of image distortions, e.g. due to magnetic field inhomogeneities due to eddy currents, e.g. caused by switching of the gradient magnetic field
Definitions
- the present invention relates to a technique for correcting an influence of an eddy current generated based on application of a gradient magnetic field in a magnetic resonance imaging (hereinafter referred to as “MRI”) apparatus.
- MRI magnetic resonance imaging
- MRI equipment measures nuclear magnetic resonance (hereinafter referred to as NMR) signals generated by the nuclear spins that make up the body of a subject, especially the human body, and two-dimensionally describes the shape and function of the head, abdomen, and extremities.
- NMR nuclear magnetic resonance
- the NMR signal is subjected to phase encoding that varies depending on the gradient magnetic field, is frequency-encoded, and is measured as time-series data.
- the measured NMR signal is reconstructed into an image by two-dimensional or three-dimensional Fourier transform.
- Patent Document 1 discloses a method of suppressing image quality degradation caused by eddy current by measuring a magnetic field induced by eddy current and applying a compensation magnetic field that cancels the magnetic field using a shim coil. Specifically, using two test gradient magnetic fields with different polarities, applying a test gradient magnetic field, irradiating the phantom with a high-frequency magnetic field pulse and a phase encoding gradient magnetic field, and generating a free induction decay signal (FID signal) measure. The phase information contained in the two obtained FID signals is affected by eddy current magnetic field, phase encoding gradient magnetic field and static magnetic field inhomogeneity.
- FID signal free induction decay signal
- phase encoding gradient magnetic field and static magnetic field inhomogeneity is eliminated by taking the difference of phase information obtained by applying Fourier transform to two FID signals measured by applying test gradient magnetic fields with different polarities. Then, a phase difference image representing the influence of the magnetic field due to the eddy current generated by the test gradient magnetic field is obtained. Based on this phase difference image, the spatial distribution of the magnetic field due to the eddy current and its temporal change are obtained, and the distribution and magnitude of the compensation magnetic field are determined.
- the method of obtaining an eddy current magnetic field generated by eddy current from the phase information of a signal measured as in Patent Document 1 is a method of measuring an eddy current magnetic field generated in a direction in which a gradient magnetic field is applied.
- the eddy current magnetic field generated by the eddy current is actually induced not only in the application direction of the gradient magnetic field but also in a direction perpendicular to the application direction (hereinafter referred to as cross term).
- the cross term is not taken into consideration, and the magnetic field in the direction orthogonal to the application direction of the gradient magnetic field cannot be measured. Therefore, these cross terms cannot be canceled by the compensation magnetic field, and cannot be corrected at the time of image reconstruction.
- the present invention has been made in view of the above problems, and corrects a magnetic field caused by an eddy current generated by applying a gradient magnetic field not only in the application direction of the gradient magnetic field but also in a direction different from the application direction of the gradient magnetic field.
- an MRI apparatus and an eddy current compensation method capable of performing
- the present invention uses a test gradient magnetic field to provide a compensation magnetic field that compensates for each direction of an eddy current magnetic field generated in a test gradient magnetic field application direction and a direction different from the application direction. Compensation to compensate for eddy current magnetic field for each direction based on the measured eddy current magnetic field in each direction along with the arbitrary gradient magnetic field when generating any gradient magnetic field Each generates a magnetic field.
- the MRI apparatus of the present invention includes a gradient magnetic field generator that generates an arbitrary gradient magnetic field, and an eddy current magnetic field based on an eddy current generated along with the application of the test gradient magnetic field, as the application direction of the test gradient magnetic field.
- the compensation magnetic field calculation unit measures the eddy current magnetic field associated with the application of an arbitrary gradient magnetic field based on the measured eddy current magnetic field in each direction in the direction different from the application direction.
- the gradient magnetic field generating unit generates a compensation magnetic field for each of the obtained directions together with an arbitrary gradient magnetic field.
- the eddy current compensation method of the present invention includes an eddy current magnetic field measurement step for measuring an eddy current magnetic field generated in a direction different from the application direction of the test gradient magnetic field and a direction different from the application direction, through the phase of the image, Based on the measured eddy current magnetic field in each direction, a compensation magnetic field calculation step for obtaining a compensation magnetic field for compensating the eddy current magnetic field in each direction with application of an arbitrary gradient magnetic field, and an arbitrary gradient magnetic field were obtained. And a compensation magnetic field generation step for generating a compensation magnetic field for each direction.
- the MRI apparatus and eddy current compensation method of the present invention can measure the magnetic field caused by the eddy current generated by the gradient magnetic field as described above, including not only the gradient magnetic field application direction but also the cross term. Using this measurement result, the magnetic field caused by the eddy current generated by applying the gradient magnetic field can be corrected not only in the gradient magnetic field application direction but also in a direction different from the gradient magnetic field application direction. As a result, the image quality is improved.
- the block diagram which shows the whole structure of one Example of the MRI apparatus concerning this invention Schematic of compensation of eddy current magnetic field of gradient magnetic field pulse.
- An example of the output of the gradient magnetic field waveform from the measurement control unit on the left side ((a), (c)), and the gradient magnetic field actually applied to the imaging area of the subject on the right side ((b), (d)) The relationship between the waveform and the case where the compensation magnetic field is not generated in the upper part ((a), (b)) of FIG. 2 and the case where the compensation magnetic field is generated in the lower part ((c), (d)), respectively. Show.
- the figure which shows the gradient magnetic field waveform actually applied to the imaging region of a subject when the gradient magnetic field of a rectangular waveform is output from the gradient magnetic field coil only to the X-axis direction.
- the figure which shows the gradient magnetic field waveform actually applied to the imaging region of a subject when the gradient magnetic field of a rectangular waveform is output from the gradient magnetic field coil only to the Y-axis direction.
- Sequence chart showing an example of a calibration pulse sequence for measuring an eddy current magnetic field caused by a gradient magnetic field
- the graph which shows an example of the time change of a phase value, and its nonlinear approximation.
- the dotted line indicates the measured data, and the solid line indicates the nonlinear approximation.
- (a) is an operation
- (b) is a processing flow of the acquired calibration data.
- the figure which shows the positional relationship of the point or area
- FIG. 10 is a flowchart showing an operation flow of the third embodiment.
- FIG. 1 is a block diagram showing the overall configuration of an embodiment of an MRI apparatus according to the present invention.
- This MRI apparatus uses a NMR phenomenon to obtain a tomographic image of a subject 101.
- a static magnetic field generating magnet 102, a gradient magnetic field coil 103, a gradient magnetic field power supply 109, and a transmission RF coil 104 and RF transmission unit 110, reception RF coil 105 and signal detection unit 106, signal processing unit 107, measurement control unit 111, overall control unit 108, display / operation unit 113, and subject 101 are mounted.
- a bed 112 for taking the subject 101 into and out of the static magnetic field generating magnet 102.
- the static magnetic field generating magnet 102 generates a uniform static magnetic field in the direction perpendicular to the body axis of the subject 101 in the vertical magnetic field method and in the body axis direction in the horizontal magnetic field method.
- a permanent magnet type, normal conducting type or superconducting type static magnetic field generating source is arranged around the.
- the static magnetic field generating magnet 102 is provided with shim coils or shim members for correcting the nonuniformity.
- the gradient magnetic field coil 103 is a coil wound in the three-axis directions of X, Y, and Z, which are the coordinate system (stationary coordinate system) of the MRI apparatus, and each gradient magnetic field coil is a gradient magnetic field power source 109 that drives it. To be supplied with current. Specifically, the gradient magnetic field power supply 109 of each gradient coil is driven according to a command from the measurement control unit 111 described later, and supplies a current to each gradient coil. Thereby, gradient magnetic fields Gx, Gy, and Gz are generated in the three axial directions of X, Y, and Z.
- a slice gradient magnetic field pulse is applied in a direction orthogonal to the slice plane (imaging cross section) to set a slice plane for the subject 101, and the remaining two orthogonal to the slice plane and orthogonal to each other
- a phase encoding gradient magnetic field pulse (Gp) and a frequency encoding gradient magnetic field pulse (Gf) are applied in the direction, and position information in each direction is encoded in the echo signal.
- the gradient coil 103 and / or the aforementioned A compensation current is applied to the shim coil.
- the transmission RF coil 104 is a coil that irradiates the subject 101 with a high frequency magnetic field (hereinafter referred to as RF) pulse, and is connected to the RF transmission unit 110 to be supplied with a high frequency pulse current.
- RF high frequency magnetic field
- the RF transmission unit 110 is driven in accordance with a command from the measurement control unit 111 described later, amplitude-modulates and amplifies the high-frequency pulse, and then transmits to the transmission RF coil 104 disposed close to the subject 101.
- the subject 101 is irradiated with the RF pulse.
- the reception RF coil 105 is a coil that receives an echo signal (NMR signal) emitted by the NMR phenomenon of the nuclear spin constituting the biological tissue of the subject 101, and is connected to the signal detection unit 106 to receive the received echo signal.
- the signal is sent to the signal detector 106.
- the signal detection unit 106 performs detection processing of the echo signal received by the reception RF coil 105. Specifically, the echo signal of the response of the subject 101 induced by the RF pulse irradiated from the RF transmission coil 104 is received by the reception RF coil 105 disposed in the vicinity of the subject 101, and measurement control described later is performed.
- the signal detection unit 106 amplifies the received echo signal, divides the signal into two orthogonal signals by quadrature detection, samples each by a predetermined number (for example, 128, 256, 512, etc.), and each sampling signal Are converted into digital quantities by A / D conversion and sent to a signal processing unit 107 described later. Therefore, the echo signal is obtained as time-series digital data (hereinafter referred to as echo data) composed of a predetermined number of sampling data.
- echo data time-series digital data
- the measurement control unit 111 mainly transmits various commands for collecting data data necessary for the reconstruction of the tomographic image of the subject 101 to the gradient magnetic field power source 109, the RF transmission unit 110, and the signal detection unit 106. And a control unit for controlling them. Specifically, the measurement control unit 111 operates under the control of the overall control unit 108 described later, and controls the gradient magnetic field power source 109, the RF transmission unit 110, and the signal detection unit 106 based on a predetermined pulse sequence. The application of the RF pulse and the gradient magnetic field pulse to the subject 101 and the detection of the echo signal from the subject 101 are repeatedly executed to collect echo data necessary for reconstructing a tomographic image of the subject 101.
- the MRI apparatus includes a calibration pulse sequence for measuring an eddy current magnetic field caused by a gradient magnetic field in addition to a normal imaging sequence as a pulse sequence.
- the imaging sequence and the calibration pulse sequence are stored in advance in the storage unit as programs.
- the CPU reads these pulse sequence programs and outputs a command to the measurement control unit 111 to execute the pulse sequence.
- the overall control unit 108 controls the measurement control unit 111 and controls various data processing and processing result display and storage, and includes an arithmetic processing unit having a CPU and a memory, an optical disk, and a magnetic disk And the like.
- the measurement control unit 111 is controlled to execute echo data collection, and when echo data is input from the signal processing unit 107, the arithmetic processing unit performs signal processing, image reconstruction by Fourier transform, and the like. The processing is executed, and the resulting tomographic image of the subject 101 is displayed on the display / operation unit 108 described later and recorded in the storage unit.
- the display / operation unit 113 is a display for displaying a tomographic image of the subject 101, and an operation unit such as a trackball or a mouse and a keyboard for inputting various control information of the MRI apparatus and control information for processing performed by the overall control unit 108. And consist of This operation unit is arranged close to the display, and the operator interactively controls various processes of the MRI apparatus through the operation unit while looking at the display.
- the transmission-side RF transmission coil 104 and the gradient magnetic field coil 103 are opposed to the subject 101 in the static magnetic field space of the static magnetic field generating magnet 102 into which the subject 101 is inserted if the vertical magnetic field method is used. If the horizontal magnetic field method is used, the object 101 is installed so as to surround it. In addition, the receiving RF coil 105 on the receiving side is disposed so as to face or surround the subject 101.
- the nuclide to be imaged by the current MRI apparatus is a hydrogen nucleus (proton) which is a main constituent material of the subject as widely used in clinical practice.
- the gradient magnetic field generating unit mainly relates to the measurement control unit 111, the gradient magnetic field coil 103, and the gradient magnetic field power source 109.
- the eddy current magnetic field measurement unit mainly includes a measurement control unit 111 and an arithmetic processing unit.
- the compensation magnetic field calculation unit is mainly related to the arithmetic processing unit.
- FIG. 2 shows an example of output of the gradient magnetic field waveform from the measurement control unit 111 shown on the left side ((a), (c)) and the actual subject shown on the right side ((b), (d)).
- the relationship with the gradient magnetic field waveform applied to the imaging region is shown. 2 shows a case where no compensation magnetic field is generated in the upper stage (FIGS. (A) and (b)), and a case where a compensation magnetic field is generated in the lower stage (FIGs. (C) and (d)).
- the gradient magnetic field waveform (FIG. (A)) output from the measurement control unit 111 is an ideal rectangular wave.
- a current having a rectangular wave is amplified by the gradient magnetic field power source and applied to the gradient magnetic field coil, whereby a gradient magnetic field is applied to the imaging region of the subject.
- the gradient magnetic field actually applied to the imaging region is caused by the rectangular gradient magnetic field output by the gradient magnetic field coil and the eddy current.
- the magnetic fields are superimposed, resulting in a distorted gradient magnetic field waveform as shown in FIG.
- the measurement control unit 111 outputs a gradient magnetic field waveform (FIG. (C)) including the compensation magnetic field in advance so as to cancel the eddy current magnetic field.
- the waveform shown in (a) is such that an overshoot is added to the rising portion of the rectangular wave and an undershoot is added to the falling portion.
- FIG. 3A shows a gradient magnetic field waveform that is actually applied to the imaging region of the subject when a gradient magnetic field 301 having a rectangular waveform is output from the gradient magnetic field coil only in the X-axis direction.
- the X-direction component of the gradient magnetic field that is actually applied to the imaging region has a distorted waveform 302 as in FIG.
- eddy current magnetic fields 303 and 304 are slightly induced, respectively. These are the eddy current magnetic field cross terms. That is, if the application of the gradient magnetic field in each direction is coupled independently of each other, the application of the gradient magnetic field in one axial direction not only induces the eddy current magnetic field in the same axial direction but also the other An eddy current magnetic field in the axial direction is induced.
- the main cause of the coupling is that the eddy current induced in various structures around the gradient coil has a component in a direction different from the applied gradient magnetic field direction, and the gradient magnetic field direction in which the component current is applied This is because a magnetic field in a different direction is generated.
- FIG. 3B shows a gradient magnetic field waveform that is actually applied to the imaging region of the subject when a gradient magnetic field 311 having a rectangular waveform is output from the gradient coil only in the Y-axis direction.
- the Y-direction component 313 of the gradient magnetic field actually applied to the imaging region has a distorted waveform as in FIG.
- eddy current magnetic fields 312 and 314 are slightly induced in the Z-axis direction and the X-axis direction, respectively, to which no gradient magnetic field is applied.
- FIG. 3C shows a gradient magnetic field waveform that is actually applied to the imaging region of the subject when a gradient magnetic field 321 having a rectangular waveform is output from the gradient coil only in the Z-axis direction.
- the Z-direction component 324 of the gradient magnetic field actually applied to the imaging region has a distorted waveform, as in FIG.
- eddy current magnetic fields 322 and 323 are slightly induced in the X-axis direction and the Y-axis direction, respectively, to which no gradient magnetic field is applied.
- the operator places a phantom in a static magnetic field and instructs the CPU to execute a calibration pulse sequence via an operation unit (not shown).
- the CPU reads the calibration pulse sequence from the storage unit and causes the measurement control unit 111 to execute it.
- This calibration pulse sequence is obtained by applying a test gradient magnetic field having a predetermined application time and intensity in a predetermined axial direction (i direction) and then reading an echo signal in a predetermined frequency encoding direction (j direction). Any sequence may be used as long as it can detect a phase change ( ⁇ ji) due to an eddy current magnetic field generated in a predetermined j direction due to an eddy current generated by a test gradient magnetic field.
- the amount of phase change ( ⁇ xx, ⁇ yy, ⁇ zz due to the eddy current magnetic field generated in the frequency encoding direction (j direction) that is the same direction as the application direction of the test gradient magnetic field (i direction) )
- the amount of phase change ( ⁇ xy, ⁇ yx, ⁇ yz, ⁇ zy, ⁇ zx, ⁇ xz) due to the cross-term eddy current magnetic field generated in the orthogonal direction.
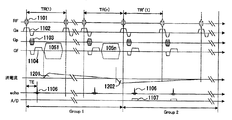
- the calibration pulse sequence disclosed in Patent Document 2 shown in FIG. 4 can be used.
- This sequence repeats a short TR pulse sequence by the gradient echo method, and consists of a unit that applies the test gradient magnetic field 1051 (Group 1 in FIG. 4) and a unit that does not apply the test gradient magnetic field (Group 2).
- the slice selective gradient magnetic field 1102 is applied in the Gs direction to excite an arbitrary cross section of the phantom, and the phase encode gradient magnetic field 1103 in the Gp direction is applied.
- a frequency encoding gradient magnetic field 1104 in the Gf direction is applied to generate an echo signal 1106. This is repeated a predetermined number of times at a predetermined time TR.
- the generated echo signal 1106 is not acquired, and in group 2, the echo signal 1106 is acquired at time 1107.
- the amount of phase encoding is the same for group 1 and group 2, and group 1 and group 2 are repeated while changing the phase encoding amount.
- the necessary number of images are reconstructed.
- the polarity of the test gradient magnetic fields 1051 to 105n is reversed, and the number of echo signals necessary for image reconstruction is acquired in each TR of group 2 in the same manner.
- the generated echo signal 1106 is not acquired, and in group 2, the echo signal 1106 is acquired at time 1107.
- the group 1 by repeatedly applying the RF pulse 1101, the nuclear spin is brought into a steady precession state, and in the group 2, the echo is maintained while maintaining the signal intensity level. This is because the signal 1106 is repeatedly acquired.
- the same effect as applying a large magnetic field for a long time can be obtained by repeatedly applying a short-time pulse magnetic field, and the burden on the gradient magnetic field coil can be reduced. In the case of the sequence shown in FIG.
- the group 1 is continuously performed while the eddy current 1201 generated at the rising of the gradient magnetic field is continued, thereby changing the eddy current 1202 generated at the falling in the group 2.
- selective measurement can be performed by the echo signal 1106.
- the echo signal 1106 is not measured in the group 2, but the echo signal is measured in the group 1.
- the phase image can be acquired by changing the correspondence relationship between the Gs, Gp, Gf and the X, Y, Z axes, and the application axis of the test gradient magnetic field 1051 and the like.
- a test gradient magnetic field is applied, and an eddy current magnetic field generated in a direction different from the application direction of the test gradient magnetic field and a direction different from the application direction are measured.
- a compensation magnetic field for compensating the eddy current magnetic field accompanying application of an arbitrary gradient magnetic field in each direction is obtained.
- a compensation magnetic field for each obtained direction is generated together with an arbitrary gradient magnetic field.
- an eddy current magnetic field in a predetermined direction and a direction perpendicular to the predetermined one direction is measured based on echo signals respectively measured at a pair of slice positions perpendicular to the predetermined one direction.
- the magnetic field due to the eddy current generated by the gradient magnetic field can be measured including not only the gradient magnetic field application direction but also the cross term.
- the magnetic field caused by the eddy current generated by applying the gradient magnetic field can be corrected not only in the gradient magnetic field application direction but also in a direction different from the gradient magnetic field application direction. As a result, the image quality is improved.
- a phase image obtained by applying a test gradient magnetic field is used to generate not only a phase change based on an eddy current magnetic field generated in the test gradient magnetic field application direction but also a direction different from the application direction.
- Each phase change based on the eddy current magnetic field is acquired. More specifically, an echo signal is measured by applying a test gradient magnetic field in a predetermined direction, and a phase image showing a phase change caused by the application of the test gradient magnetic field is regenerated for each slice position based on the echo signal. Configured to acquire a phase change amount in a predetermined direction and a direction perpendicular to the predetermined direction on the pair of phase images.
- an eddy current magnetic field generated in a predetermined direction and a direction perpendicular to the predetermined one direction is measured in accordance with the application of the test gradient magnetic field.
- the measurement of the eddy current magnetic field through the acquisition of the phase change amount is the same in each embodiment described below.
- a compensation parameter for defining a compensation magnetic field for compensating the eddy current magnetic field in each direction is obtained from the phase change amount, and the eddy current magnetic field in each direction is compensated using the compensation parameter.
- the compensation magnetic field for compensating the eddy current magnetic field by obtaining the compensation parameter from this phase change amount is the same in each embodiment described below.
- the slice position for obtaining the phase image is predetermined. A pair of slice positions that are symmetrical with respect to the origin or a coordinate plane perpendicular to the direction in one direction.
- a point or region for acquiring a specific phase value is obtained by locating each vertex of a rectangle that is symmetrical with respect to the origin or a coordinate plane perpendicular to the direction in a predetermined direction at the pair of slice positions.
- a phase value of a region including the vertex is acquired.
- a test gradient magnetic field 1051 or the like is applied in the i direction, and a plurality of phase images having different acquisition times are acquired with the j direction as the frequency encoding direction.
- a test gradient magnetic field 1051 or the like whose polarity is inverted in the i direction is applied, and a plurality of phase images having different acquisition times are acquired with the j direction as the frequency encoding direction.
- the phase image of the same acquisition time is differentiated, and the several phase difference image from which acquisition time differs is acquired.
- the phase value at the same position (for example, the origin) on each phase difference image acquired at different acquisition times in this way represents the time change of the eddy current magnetic field at that position.
- phase difference between two points equidistant from the origin in the direction for obtaining the time change of the eddy current magnetic field is obtained, and the phase difference is nonlinearly approximated using the Levenberg-Marquardt method or the like.
- Measurement data (t i ) A 0 + A 1 Exp (-t i / ⁇ g1 ) + A 2 Exp (-t i / ⁇ g2 ) + ... + A m Exp (-t i / ⁇ gm (1)
- the plurality of sets of amplitudes (A) and time constants ( ⁇ ) are decomposed, and these multiple sets of amplitudes (A) and time constants ( ⁇ ) are used as compensation parameters.
- compensation parameters are stored in the storage unit, and when executing an arbitrary pulse sequence thereafter, the CPU reads these compensation parameters from the storage unit and notifies the measurement control unit 111 of them. Based on these compensation parameters and the gradient magnetic field defined by the pulse sequence, the measurement control unit 111 approximates the compensation magnetic field for compensating the eddy current magnetic field based on this gradient magnetic field in the same manner as in equation (1).
- the gradient magnetic field power source is controlled so as to generate a gradient magnetic field obtained by using the equation and adding a compensation magnetic field.
- FIG. 5 shows an example of the temporal change of the phase value and its nonlinear approximation. The dotted line indicates the measured data, and the solid line indicates the nonlinear approximation.
- FIG. 6 is a flowchart showing the operation flow of the present embodiment.
- (a) is an operation
- (b) is a processing flow of the acquired calibration data.
- These operation flows are stored in advance in a storage unit such as a magnetic disk as a program, and are executed by the CPU reading it into the memory and executing it as necessary.
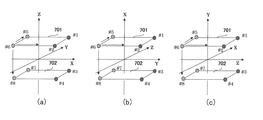
- FIG. 7 is a diagram showing the positional relationship between points or regions for acquiring the phase values of the phase difference image.
- each step of FIG. 6 will be described in detail.
- the measurement control unit 111 determines that the slice direction (Gs) is the Z axis, the phase encoding direction (Gp) is the Y axis, and the frequency encoding direction (Gf) based on the operator's preset settings in the sequence of FIG. Is set to the X axis, and a positive test gradient magnetic field 1051 or the like is applied to the X axis to measure an echo signal from a predetermined slice position.
- the slice positions are a pair of slice positions that are symmetrical with respect to the origin or the XY plane and are separated by a predetermined distance in the Z-axis direction and parallel to the XY plane.
- the measurement control unit 111 measures echo signals in order to obtain each image of the pair of slice positions at predetermined time intervals (TR), and sets the data as a positive test gradient magnetic field data set. Furthermore, if necessary, an image of N pairs of slice positions and an image of the XY plane including the origin may be acquired by changing the predetermined distance in the Z-axis direction. That is, two or more images are acquired.
- step 602 the measurement control unit 111 applies a test gradient magnetic field 1051 or the like to the negative polarity, measures an echo signal in the same manner as in step 601, and acquires a negative test gradient magnetic field data set.
- the measurement control unit 111 changes the application axis of the test gradient magnetic field 1051 and the like to the Y axis, measures echo signals in the same manner as in steps 601 and 602, and sets the positive / negative test gradient magnetic field data set. Get each.
- Steps 605 and 606 the measurement control unit 111 changes the application axis of the test gradient magnetic field 1051 and the like to the Z axis, measures the echo signal similarly to Steps 601 and 602, and sets the positive / negative test gradient magnetic field data set. Get each.
- the obtained data set is processed as shown in Fig. 6 (b).
- the data set (echo signal 1106) acquired in steps 601 to 606 is inhomogeneous in the static magnetic field in addition to the phase information due to the magnetic field caused by the eddy current generated by the test gradient magnetic field 1051 and the like. And eddy currents due to the phase encoding gradient magnetic field 1103 and the frequency encoding gradient magnetic field 1104 are also affected. Therefore, as shown in FIG. 6 (b), only the eddy current magnetic field generated by the test gradient magnetic field is obtained by differentially processing the phase images at the same slice position obtained by applying the positive and negative test gradient magnetic fields. An included phase difference image data set is obtained.
- Processing flow for a data set acquired by applying a test gradient magnetic field in the X-axis direction in steps 601 and 602 of FIG. 6A will be described.
- Processing flow for the data set acquired by applying the test gradient magnetic field in the Y-axis direction in steps 603 and 604, and processing flow for the data set acquired by applying the test gradient magnetic field in the Z-axis direction in steps 605 and 606 Is the same processing.
- step 611 the CPU performs a two-dimensional Fourier transform of a data set of echo signals 1106 acquired in step 601 by applying a positive test gradient magnetic field 1051 or the like in the X-axis direction at predetermined time intervals (TR). Transform and reconstruct time-resolved two-dimensional complex image (real and imaginary image) data.
- the reconstructed two-dimensional complex image is an image on the XY plane as shown in FIG. 7 (a).
- step 612 the CPU obtains the phase from the arc tangent of the ratio between the real part and the imaginary part of each point of the complex image obtained in step 611, and is symmetrical with respect to the origin or the XY plane and separated by a predetermined distance in the Z direction. A pair or two or more phase image data parallel to the XY plane are obtained.
- step 621 as in step 611, the CPU applies the data set of the echo signal 1106 obtained by applying a negative test gradient magnetic field 1051 etc. in the X-axis direction in step 601 to a predetermined time interval (TR). Two-dimensional Fourier transform is performed every time, and time-resolved two-dimensional complex image (real image and imaginary image) data is reconstructed.
- TR time interval
- step 622 as in step 612, the CPU obtains the phase from the arc tangent of the ratio between the real part and the imaginary part of each point of the complex image obtained in step 621, symmetrically with respect to the origin, and predetermined in the Z direction. A pair of or two or more pieces of phase image data parallel to the XY plane at a distance are obtained.
- step 631 the CPU obtains a phase difference between the pair or two or more phase images acquired in step 612 and the pair or two or more phase images acquired in step 622, and symmetrically about the origin or the XY plane.
- a pair or two or more pieces of phase difference image data parallel to the XY plane at a predetermined distance in the Z direction are acquired.
- FIG. 7 (a) shows a case where two phase difference images are acquired.
- the obtained phase difference image data removes the effects of static magnetic field inhomogeneity and the effects of eddy currents due to phase encoding gradient magnetic field 1103 and frequency encoding gradient magnetic field 1104, and only the effects of eddy currents caused by test gradient magnetic field 1051 etc.
- the phase image is included.
- the amount of phase change ⁇ xx in the X-axis direction when the test gradient magnetic field is applied in the X-axis direction can be obtained at every predetermined time interval (TR). Can do. Furthermore, the obtained phase change amount ⁇ xx may be divided by a distance ⁇ X between two points or two regions to obtain a phase change amount ⁇ xx per unit length. When obtaining a phase difference between a plurality of two points or two regions, the average of these may be used as the phase change amount ⁇ xx. The same applies to the subsequent calculations.
- step 632 the CPU performs a nonlinear approximation using the Levenberg-Marquardt method or the like, as described above, for each phase change amount ⁇ xx, ⁇ yx, ⁇ zx, as described above, using (1) ) To obtain a compensation parameter by decomposing it into a plurality of sets of amplitudes (A) and time constants ( ⁇ ).
- a compensation parameter for compensating the eddy current magnetic field generated in the X-axis direction by the gradient magnetic field applied in the X-axis direction is obtained from the phase change amount ⁇ xx at each predetermined time interval (TR), and the predetermined time interval (TR ) From each phase change amount ⁇ yx, find a compensation parameter to compensate the eddy current magnetic field generated in the Y-axis direction by the gradient magnetic field applied in the X-axis direction, from the phase change amount ⁇ zx every predetermined time interval (TR)
- the compensation parameter for compensating the eddy current magnetic field generated in the Z-axis direction by the gradient magnetic field applied in the X-axis direction is obtained. Then, the CPU stores these compensation parameters in the storage unit.
- step 633 when applying the gradient magnetic field in the X-axis direction, the CPU reads the compensation parameter obtained in step 632 from the storage unit and notifies the measurement control unit 111 of it. Based on these compensation parameters, the measurement control unit 111 generates a gradient magnetic field by adding a compensation magnetic field component for compensating the eddy current magnetic field based on the application of the X-axis gradient magnetic field to each axial gradient magnetic field. To control the gradient magnetic field power supply. In this case, the X-axis direction gradient magnetic field is added with the compensation magnetic field in the X-axis direction and output, but the Y and Z-axis direction gradient magnetic fields are output only for the compensation magnetic field.
- the process flow is the same when acquiring a compensation parameter by applying a test gradient magnetic field in the Y-axis direction. That is, in steps 603 and 604, the measurement control unit 111 acquires a data set by applying a test gradient magnetic field in the Y-axis direction. Then, as a process corresponding to steps 611-632, the CPU performs the phase change amount ⁇ yy due to the eddy current magnetic field in the Y-axis direction and the phase change amount ⁇ xy and Z-axis direction due to the eddy current magnetic field in the X-axis direction which is a cross term.
- the phase change amount ⁇ ⁇ ⁇ zy due to the eddy current magnetic field is acquired at each predetermined time interval (TR), and these phase change amounts are nonlinearly approximated to obtain a plurality of sets of amplitudes (A) and Decompose them into time constants ( ⁇ ) and use them as compensation parameters.
- the measurement control unit 111 assigns each Y-axis direction gradient magnetic field to each Y-axis direction gradient magnetic field based on these compensation parameters.
- the gradient magnetic field power source is controlled so as to generate the respective gradient magnetic fields by adding compensation magnetic field components for compensating the eddy current magnetic field based on the above.
- the Y-axis direction gradient magnetic field is added with the compensation magnetic field in the Y-axis direction and output, but the Z and X-axis direction gradient magnetic fields are output only for the compensation magnetic field.
- Steps 605 and 606 the measurement control unit 111 acquires a compensation parameter by applying a test gradient magnetic field in the Z-axis direction. Then, as a process corresponding to steps 611-632, the CPU performs the phase change amount ⁇ ⁇ ⁇ zz due to the eddy current magnetic field in the Z-axis direction and the phase change amount ⁇ xz due to the eddy current magnetic field in the X-axis direction which is a cross term and the Y-axis direction.
- the phase change amount ⁇ yz due to the eddy current magnetic field is obtained at each predetermined time interval (TR), and these phase change amounts are nonlinearly approximated to obtain a plurality of sets of amplitudes (A) and Decompose them into time constants ( ⁇ ) and use them as compensation parameters.
- the measurement control unit 111 applies a gradient magnetic field in the Z-axis direction to each axial gradient magnetic field based on these compensation parameters.
- the gradient magnetic field power supply is controlled so as to generate the respective axial gradient magnetic fields by adding compensation magnetic field components for compensating the eddy current magnetic field based on the above.
- the Z-axis direction gradient magnetic field is added with the compensation magnetic field in the Z-axis direction and output, but the X and Y-axis direction gradient magnetic fields are output only for the compensation magnetic field.
- a slice plane including the magnetic field center is imaged, a phase difference image at the slice position is acquired, phase data at the magnetic field center (0 position) is acquired, and the phase data at the magnetic field center is used as a reference phase. Then, the phase data acquired at a point or region other than the magnetic field center is compared with the reference phase. Thus, it may be determined whether or not the phase data acquired at a point or region away from the magnetic field center is appropriate, and the calculation for obtaining the compensation parameter may be performed only when it is determined as appropriate. Thereby, the accuracy and reliability of the compensation parameter can be improved.
- the MRI apparatus and the eddy current compensation method of the present embodiment not only the eddy current magnetic field generated in the application direction of the gradient magnetic field but also the eddy current magnetic field generated in the direction different from the application direction. Since it is possible to measure cross-term changes over time, based on these measurement results, not only the gradient magnetic field application direction but also the eddy current magnetic field generated in a different direction can be compensated. Become. As a result, it is possible to acquire a high-quality image from which these influences are removed including not only the eddy current magnetic field in the application direction of the gradient magnetic field but also the cross term.
- rectangles of different sizes are set on the phase difference images respectively obtained at a plurality of pairs of slice positions perpendicular to a predetermined direction, and the phase of each vertex of the rectangle or the region including the vertex is set.
- the amount of phase change More specifically, phase data of a plurality of points or regions on a plurality of pairs of phase difference images perpendicular to a predetermined direction is obtained, and the amount of phase change in each axial direction is obtained.
- the in-plane position of the point or region where the phase data is acquired is made different for each pair of phase difference images.
- an average of a plurality of phase change amounts is obtained for each direction to obtain a final phase change amount.
- FIG. 7 (a) different points from the above-described first embodiment will be described by taking as an example a case where a test gradient magnetic field is applied in the X-axis direction with the Z-axis direction as the slice direction.
- (# 1 ⁇ # 2), (# 3 ⁇ # 4), (# 5 ⁇ # 6), (# 7 ⁇ # 8) are parallel to the Y axis, and (# 1 ⁇ # 5 ), (# 2 ⁇ # 6), (# 3 ⁇ # 7), (# 4 ⁇ # 8) are parallel to the X axis, and (# 1 ⁇ # 3), (# 2 ⁇ # 4), In (# 5 ⁇ # 7) and (# 6 ⁇ # 8), each point or region is set so as to have a positional relationship parallel to the Z axis.
- the points or regions (# 9, # 10, # 13, # 14) and (# 11, # 12, # 15, # 16) for acquiring phase data in the pair of phase difference images 803, 804 on the inner side in the Z-axis direction The position in the XY plane is made different from (# 1, # 2, # 5, # 6) and (# 3, # 4, # 7, # 8) in the pair of phase difference images 801, 802.
- a phase data acquisition point or region in the pair of phase difference images 803 and 804 is set inside the XY plane. In addition, you may set outside on the XY plane instead of inside.
- phase change amount ( ⁇ ji) may be divided by a distance ⁇ j between two points or two regions parallel to the j direction to obtain a phase change amount ⁇ ji per unit length.
- phase change amount ( ⁇ ji) is obtained for each predetermined time interval (TR), and their nonlinear approximation is performed, and a plurality of sets are obtained as in equation (1). It decomposes into amplitude (A) and time constant ( ⁇ ) and uses them as compensation parameters.
- the measurement control unit 111 applies a test gradient magnetic field and measures an echo signal from a predetermined slice position using the calibration pulse sequence of FIG.
- the slice positions are symmetrical with respect to the origin or the XY plane, are separated by a predetermined distance in the Z direction, and a pair of slice positions parallel to the XY plane are different from each other by a predetermined distance in the Z axis direction.
- the measurement control unit 111 measures echo signals to obtain a data set in order to acquire each image of these M pairs of slice positions at predetermined time intervals (TR). As described above, the phase data of the magnetic field center (0 position) may be acquired as a reference.
- the CPU uses the data set acquired in Steps 601 to 606, symmetrically with respect to the origin or the XY plane, separated by a predetermined distance in the Z direction, and placed on the XY plane.
- the CPU obtains a phase change amount ( ⁇ ji) by obtaining a difference between the phase data of two points or two regions separated by a predetermined distance in each axial direction.
- the CPU obtains a plurality of phase change amounts ( ⁇ ji) by changing the positions in the XY plane of two points or two regions for each pair of phase difference images.
- the obtained phase change amount ( ⁇ ji) may be divided by the obtained distance between two points or two regions to obtain the phase change amount per unit length.
- an average of a plurality of phase change amounts ( ⁇ ji) is set as a final phase change amount ( ⁇ ji).
- the CPU performs nonlinear approximation using the phase change amount ( ⁇ ji) for each predetermined time interval (TR) to obtain a compensation parameter and stores it in the storage unit.
- the correction step 633 of the eddy current gradient magnetic field is the same as that in the first embodiment.
- the operator can select the compensation direction of the eddy current magnetic field. Then, the eddy current magnetic field in the direction to compensate the selected eddy current magnetic field is measured, a compensation magnetic field to compensate the eddy current magnetic field in the direction to compensate the selected eddy current magnetic field is obtained, and the selected eddy current magnetic field is selected together with the gradient magnetic field. A compensation magnetic field is generated in a direction to compensate the current magnetic field.
- step 901 the operator selects an axial direction (j) for compensating the eddy current magnetic field from a GUI (not shown).
- step 902 the operator sets the number of acquisition directions (N) of the phase change amount from the GUI (not shown).
- step 903 the measurement control unit 111 applies a test gradient magnetic field in the i (i is X, Y, or Z) axial direction, and acquires a phase difference image based on the above-described first or second embodiment. To do.
- step 904 on the phase difference image acquired in step 903, the CPU acquires phase data at two points or regions with different axial directions (j) that compensate the eddy current magnetic field set in step 901.
- a phase change amount ( ⁇ ji) is obtained every predetermined time interval (TR) in this direction.
- step 905 if the acquisition direction number (N) of the phase change amount set in step 902 is greater than 1, the CPU changes the axial direction for acquiring the phase change amount, and also in that direction at a predetermined time interval. Get the phase change ( ⁇ ⁇ * i) for each (TR). Note that the axial direction for acquiring the phase change amount is a direction orthogonal to the direction in which the phase change amount has already been acquired. The CPU repeats this operation until the number of phase change amount acquisition directions becomes equal to N set in step 902.
- step 906 apply the test gradient magnetic field in all directions, and apply the test gradient magnetic field until the phase change amount is obtained for the axial direction (j) that compensates the eddy current magnetic field set in step 901. Steps 903 to 905 are repeated.
- step 907 the CPU determines the phase change amount for each predetermined time interval (TR) with respect to the axial direction for which the phase change amount for each predetermined time interval (TR) is obtained, as described above, such as the Levenberg-Marquardt method.
- a nonlinear approximation is performed, and a plurality of sets of amplitudes (A) and time constants ( ⁇ ) are decomposed to obtain the axial compensation parameters.
- step 908 in the subsequent execution of an arbitrary pulse sequence, uses the compensation parameter for each axial direction obtained in step 907 to apply the gradient magnetic field applied in each axial direction to each axial direction.
- the gradient magnetic field power source is controlled so as to generate a gradient magnetic field to which a compensation magnetic field component for compensating an eddy current magnetic field based on the gradient magnetic field is added.
- the compensation magnetic field is added and output in the direction in which the gradient magnetic field is applied, but only the compensation magnetic field is output in the direction in which the gradient magnetic field is not applied.
- the MRI apparatus and the eddy current compensation method of the present embodiment it becomes possible to compensate for the eddy current magnetic field in the axial direction desired by the operator, so that the accuracy in the desired direction is particularly high. It becomes possible to compensate for the eddy current magnetic field well.
- the specific direction In particular, the eddy current magnetic field compensation of this embodiment is effective.
- the phase difference image data is acquired as three-dimensional volume data, so that the phase change amount in any direction can be acquired and the eddy current magnetic field generated in any direction can be compensated. More specifically, each of the three-dimensional images is reconstructed from echo signals measured by changing the polarity of the test gradient magnetic field, and the phase image of the two three-dimensional images is subtracted to obtain a three-dimensional phase difference image.
- the eddy current magnetic field is measured based on the phase of the point or region specified on the image of, and a compensation magnetic field is obtained to compensate the measured eddy current magnetic field, and the obtained compensation magnetic field is distributed for each application direction of the gradient magnetic field.
- a compensation magnetic field distributed for each application direction of the gradient magnetic field is generated.
- phase difference image data as three-dimensional volume data will be described with reference to FIG. 4
- the calibration pulse sequence shown in FIG. 4 is a two-dimensional pulse sequence, but any three-dimensional pulse sequence can be obtained by inserting a known slice-encoding gradient magnetic field into the slice direction (Gs) to form a three-dimensional pulse sequence. An image can be taken.
- phase difference image data when the test gradient magnetic field is applied in this axial direction is three-dimensional. Obtained as volume data. Then, a three-dimensional image is taken with the test gradient magnetic field application axis direction as the X, Y, and Z axis directions, respectively, and phase difference image data for the axial direction to which the test gradient magnetic field is applied is acquired as three-dimensional volume data, respectively .
- the phase change amount between these points or regions is obtained.
- the phase change amount is divided by the distance between two points or two regions to obtain a phase change amount per unit length, thereby generating an eddy current magnetic field generated in a direction connecting these points or regions.
- a compensation parameter for compensating for is obtained.
- a plane that is paired with the plane is obtained, and a phase change between each vertex or a region including the vertex in the pair of planes
- a compensation parameter for compensating the eddy current magnetic field in the three orthogonal directions defined by the vertices of the pair of planes is obtained.
- the circles in FIG. 10 represent points or areas designated by the operator, or auxiliary points or areas set by the CPU in accordance with the designation by the operator.
- the compensation parameter When applying the gradient magnetic field, the compensation parameter is used to superimpose the gradient magnetic field to which the compensation magnetic field for compensating the eddy current magnetic field generated in that direction is applied.
- the compensation magnetic field in an arbitrary direction is decomposed into components in the X, Y, and Z axis directions and superimposed on the gradient magnetic fields applied in the X, Y, and Z axis directions, respectively.
- a test gradient magnetic field is applied in the X, Y, and Z axis directions, and phase difference image data is acquired as three-dimensional volume data, respectively.
- the measurement control unit 111 applies a positive or negative test gradient magnetic field in the X-axis direction using the above-described three-dimensional calibration pulse sequence, and respectively captures a three-dimensional image.
- three-dimensional imaging in which a positive or negative test gradient magnetic field is applied in the Y-axis direction and three-dimensional imaging in which a positive or negative test gradient magnetic field is applied in the Z-axis direction are performed.
- the CPU acquires three-dimensional phase difference image data when the test gradient magnetic field is applied in the X-axis direction from two three-dimensional images acquired by applying the test gradient magnetic field in the X-axis direction.
- the CPU acquires three-dimensional phase difference image data when a test gradient magnetic field is applied in the Y-axis direction from two three-dimensional images acquired by applying a test gradient magnetic field in the Y-axis direction,
- Three-dimensional phase difference image data when a test gradient magnetic field is applied in the Z-axis direction is acquired from two three-dimensional images acquired by applying a test gradient magnetic field in the Z-axis direction.
- step 1103 the CPU sets two rectangular planes that are perpendicular to the direction and symmetrical with respect to the origin based on the direction specified in step 1102, and sets the four vertex positions of each rectangular plane as phase data. Is set as a point or region to acquire. Thereby, points or areas for acquiring eight phase data are set. In addition, the CPU similarly sets these eight points or regions to other three-dimensional phase difference images.
- FIG. 12 shows an example of a direction (1201) for compensating an eddy current magnetic field, two rectangular planes (1202, 1203) based on this direction, and eight points at the apex thereof.
- step 1104 the CPU obtains phase data at the eight points or regions set in step 1103 from the three-dimensional phase difference image data, and is parallel to the direction (a) perpendicular to the rectangular plane.
- a phase change amount ( ⁇ ai, ⁇ bi, ⁇ ci) in two directions (b, c) perpendicular to each other is obtained.
- the CUP obtains a phase change amount in these three directions (a, b, c) for each three-dimensional phase difference image in each test gradient magnetic field application direction (X, Y, Z).
- phase change amount ( ⁇ ax, ⁇ bx, ⁇ cx) is obtained by applying the test gradient magnetic field in the Y-axis direction from the three-dimensional phase difference image data acquired by applying the test gradient magnetic field in the X-axis direction.
- Phase change amounts ( ⁇ ay, ⁇ by, ⁇ cy) from three-dimensional phase difference image data, and phase change amounts ( ⁇ az, ⁇ bz, ⁇ cz) from three-dimensional phase difference image data acquired by applying a test gradient magnetic field in the Z-axis direction Respectively.
- step 1105 the CPU obtains compensation parameters in three directions (a, b, c) using the phase variation obtained in step 1104. Further, the CPU converts the compensation parameter to the (X, Y, Z) coordinate system for the compensation parameter to be converted to the (X, Y, Z) coordinate system which is the gradient magnetic field coordinate system. Then, the coordinate-transformed values are added for each (X, Y, Z) direction.
- the compensation parameter corresponding to the amplitude (A) in equation (1) is a compensation parameter to be converted to the (X, Y, Z) coordinate system, but the time constant ( ⁇ ) is the same value as (X, Y , Z)
- the amplitude (A) converted into the coordinate system is used as it is.
- the CPU stores the compensation parameter including the time constant ( ⁇ ) and the amplitude (A) converted into the (X, Y, Z) coordinate system in the storage unit.
- step 1106 when applying the gradient magnetic field, the measurement control unit 111 reads the compensation parameter obtained in step 1105 from the storage unit and notifies the measurement control unit 111 of the compensation parameter. Based on these compensation parameters, the measurement control unit 111 controls the gradient magnetic field power supply so as to generate a gradient magnetic field to which a compensation magnetic field for compensating an eddy current magnetic field based on this gradient magnetic field is added.
- the measurement control unit 111 controls the gradient magnetic field power supply so as to generate a gradient magnetic field to which a compensation magnetic field for compensating an eddy current magnetic field based on this gradient magnetic field is added.
- the MRI apparatus and the eddy current compensation method of the present embodiment it is possible to compensate an eddy current magnetic field in an arbitrary direction.
- the eddy current magnetic field can be compensated particularly accurately in a desired direction by the operator's selection.
- Specific utility is the same as in Example 3.
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Engineering & Computer Science (AREA)
- Signal Processing (AREA)
- High Energy & Nuclear Physics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Magnetic Resonance Imaging Apparatus (AREA)
Abstract
Description
次に、渦電流と、渦電流に基づく磁場を補償する補償磁場とを、図2を用いて簡単に説明する。図2は、左側((a)、(c)図)に示した計測制御部111からの傾斜磁場波形の出力例と、右側((b)、(d)図)に示した実際に被検体の撮像領域に印加される傾斜磁場波形との関係を示す。また、図2の上段((a),(b)図)に補償磁場を発生させない場合を、下段((c),(d)図)に補償磁場を発生させる場合を示す。
次に、渦電流磁場のクロスタームについて図3A,図3B、及び図3Cに基づいて説明する。図3Aは、X軸方向のみに矩形波形の傾斜磁場301を傾斜磁場コイルから出力した場合に、実際に被検体の撮像領域に印加される傾斜磁場波形を示す。この場合は、撮像領域に実際に印加される傾斜磁場のX方向成分は、図2と同様に、歪んだ波形302となる。さらに、傾斜磁場が印加されなかったY軸方向とZ軸方向にも、主に、印加された傾斜磁場の立ち上がり部と立下り部の近傍で、即ち、印加された傾斜磁場が時間的に大きく変化する時点の近傍で、それぞれ僅かに渦電流磁場303、304が誘起される。これらが渦電流磁場のクロスタームである。即ち、傾斜磁場の各方向への印加が相互に独立でなくカップリングしていると、一つの軸方向への傾斜磁場の印加が、同じ軸方向の渦電流磁場の誘起のみならず、他の軸方向への渦電流磁場を誘起することになる。カップリングの主原因は、傾斜磁場コイル周辺の様々な構造体に誘起される渦電流が、印加された傾斜磁場方向と異なる方向の成分を有して、該成分電流が印加された傾斜磁場方向と異なる方向の磁場を発生するためである。
次に、傾斜磁場に起因する渦電流磁場を計測するための較正パルスシーケンスについて説明する。
本実施例は、テスト傾斜磁場を印加して取得した位相画像を用いて、該テスト傾斜磁場の印加方向に発生する渦電流磁場に基づく位相変化のみならず、該印加方向と異なる方向に発生する渦電流磁場に基づく位相変化をそれぞれ取得する。より具体的には、所定の一方向にテスト傾斜磁場を印加してエコー信号を計測し、エコー信号に基づいてテスト傾斜磁場の印加により生じた位相変化を示す位相画像をスライス位置毎にそれぞれ再構成し、一対の位相画像上で所定の一方向と該所定の一方向に垂直な方向についての位相変化量をそれぞれ取得する。このような位相変化量の取得を介して、テスト傾斜磁場の印加に伴って、所定の一方向と該所定の一方向に垂直な方向に発生する渦電流磁場をそれぞれ計測するものである。この位相変化量の取得を介した渦電流磁場の計測は、以下に説明する各実施例において同様である。
前述した較正パルスシーケンスを用いて、i方向にテスト傾斜磁場1051等を印加して、j方向を周波数エンコード方向として、それぞれ取得時間の異なる複数の位相画像を取得する。次に、i方向に極性を反転させたテスト傾斜磁場1051等を印加して、j方向を周波数エンコード方向として、それぞれ取得時間の異なる複数の位相画像を取得する。そして、同じ取得時間同士の位相画像を差分して、取得時間の異なる複数の位相差分画像を取得する。このようにして取得された取得時間の異なる各位相差分画像上の同じ位置(例えば原点)の位相値は、その位置における渦電流磁場の時間変化を表している。
このように複数組の振幅(A)と時定数(τ)に分解して、これらの複数組の振幅(A)と時定数(τ)とを補償パラメータとする。
以上までが本実施例の動作フローの説明である。
本実施例は、所定の一方向に垂直な複数対のスライス位置でそれぞれ取得した位相差分画像上で、それぞれ異なる大きさの長方形を設定し、長方形の各頂点又は該頂点を含む領域の位相を用いて位相変化量を取得する。より具体的には、所定の一方向に垂直な複数対の位相差分画像上の複数の点又は領域の位相データを求めて、各軸方向の位相変化量を求める。その際、各対の位相差分画像毎に位相データを取得する点又は領域の面内位置を異ならせる。そして、方向毎に複数の位相変化量の平均を求めて、最終的な位相変化量とする。
以上説明したように、本実施例のMRI装置及び渦電流補償方法によれば、複数対の位相差分画像を求めて各軸方向で複数の位相変化量を求めてそれらの平均を最終的な位相変化量とするので、補償パラメータ及びこのようにして求められた補償パラメータに基づく渦電流磁場の補償をより高精度に行うことが可能になる。
本実施例は、操作者が、渦電流磁場の補償方向を選択可能とする。そして、選択された渦電流磁場を補償する方向についての渦電流磁場を計測し、選択された渦電流磁場を補償する方向の渦電流磁場を補償する補償磁場を求め、傾斜磁場と共に選択された渦電流磁場を補償する方向の補償磁場を発生する。
本実施例の動作ブローを図9の示すフローチャートに基づいて説明する。
ステップ901で、操作者は、不図示のGUIより、渦電流磁場を補償する軸方向(j)を選択する。
以上までが本実施例の処理フローの説明である。
本実施例は、位相差分画像データを、3次元ボリュームデータとして取得することで、あらゆる方向での位相変化量を取得可能とし、任意の方向に発生する渦電流磁場を補償可能とする。より具体的には、テスト傾斜磁場の極性を変えて計測したエコー信号からそれぞれ3次元画像を再構成し、2つの3次元画像の位相画像を差分して3次元位相差分画像を求め、いずれかの画像上で指定された点又は領域の位相に基づいて渦電流磁場を計測し、計測された渦電流磁場を補償する補償磁場を求め、該求めた補償磁場を傾斜磁場の印加方向毎に配分し、傾斜磁場と共に、該傾斜磁場の印加方向毎に配分された補償磁場をそれぞれ発生する。
以上迄が本実施例の動作フローの説明である。
Claims (15)
- 任意の傾斜磁場を発生する傾斜磁場発生部と、
テスト傾斜磁場の印加に伴って発生する渦電流に基づく渦電流磁場を画像の位相を介して計測する渦電流磁場計測部と、
前記計測された渦電流磁場に基づいて、前記任意の傾斜磁場の印加に伴う渦電流磁場を補償するための補償磁場を求める補償磁場算出部と、
を有し、
前記傾斜磁場発生部は、前記任意の傾斜磁場に付加して前記補償磁場を発生する磁気共鳴イメージング装置であって、
前記渦電流磁場計測部は、前記テスト傾斜磁場の印加方向と、該印加方向と異なる方向とに、それぞれ発生する渦電流磁場を計測し、
前記補償磁場算出部は、前記計測された各方向の渦電流磁場に基づいて、前記任意の傾斜磁場の印加に伴う渦電流磁場を該方向毎に補償する補償磁場をそれぞれ求め、
前記傾斜磁場発生部は、前記任意の傾斜磁場と共に、前記求めた方向毎の補償磁場をそれぞれ発生することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、所定の一方向に垂直な一対のスライス位置でそれぞれ計測したエコー信号に基づいて、前記所定の一方向と該所定の一方向に垂直な方向についての渦電流磁場を計測することを特徴とする磁気共鳴イメージング装置。 - 請求項2記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記所定の一方向に前記テスト傾斜磁場を印加して前記エコー信号を計測し、前記エコー信号に基づいて前記テスト傾斜磁場の印加により生じた位相変化を示す位相画像を前記スライス位置毎にそれぞれ再構成し、一対の位相画像上で前記所定の一方向と該所定の一方向に垂直な方向についての位相変化量をそれぞれ取得することにより、前記所定の一方向と該所定の一方向に垂直な方向についての前記渦電流磁場をそれぞれ計測することを特徴とする磁気共鳴イメージング装置。 - 請求項3記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、第1軸方向にテスト傾斜磁場を印加して、前記第1方向と該第1方向に垂直で互いに垂直な第2方向及び第3方向のそれぞれで前記位相変化量を取得し、方向毎の前記渦電流磁場を計測することを特徴とする磁気共鳴イメージング装置。 - 請求項3記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記テスト傾斜磁場の極性を変えて計測したエコー信号からそれぞれ位相画像を再構成し、同じスライス位置の2つの位相画像を差分して求めた一対の位相差分画像上で前記位相変化量を取得することを特徴とする磁気共鳴イメージング装置。 - 請求項5記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記位相差分画像上で、前記所定の一方向と該所定の一方向に垂直な方向の各方向で2つの点又は領域における位相の差分を前記位相変化量として求めることを特徴とする磁気共鳴イメージング装置。 - 請求項2記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記所定の一方向で、原点又は原点を含み前記所定の一方向に垂直な座標面に関して対称に、前記一対のスライス位置のエコー信号を計測することを特徴とする磁気共鳴イメージング装置。 - 請求項3記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記位相差分画像上で、前記所定の一方向に垂直な方向に辺を有する長方形の頂点又は該頂点を含む領域の位相を用いて前記位相変化量を取得することを特徴とする磁気共鳴イメージング装置。 - 請求項8記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、前記所定の一方向に垂直な複数対のスライス位置でそれぞれ取得した前記位相差分画像上で、それぞれ異なる大きさの前記長方形を設定し、長方形の各頂点又は該頂点を含む領域の位相を用いて前記位相変化量を取得することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、選択された渦電流磁場を補償する方向についての渦電流磁場を計測し、
前記補償磁場算出部は、前記選択された渦電流磁場を補償する方向の渦電流磁場を補償する補償磁場を求め、
前記傾斜磁場発生部は、前記傾斜磁場と共に、前記選択された渦電流磁場を補償する方向の補償磁場を発生することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記渦電流磁場計測部は、テスト傾斜磁場の極性を変えて計測したエコー信号からそれぞれ3次元画像を再構成し、2つの3次元画像の位相画像を差分して3次元位相差分画像を求め、前記各画像のいずれか上で指定された点又は領域の位相に基づいて前記渦電流磁場を計測し、
前記補償磁場算出部は、前記計測された渦電流磁場を補償する補償磁場を求め、該求めた補償磁場を前記傾斜磁場の印加方向毎に配分し、
前記傾斜磁場発生部は、前記傾斜磁場と共に、前記傾斜磁場の印加方向毎に配分された補償磁場をそれぞれ発生することを特徴とする磁気共鳴イメージング装置。 - 請求項1記載の磁気共鳴イメージング装置において、
前記補償磁場算出部は、前記補償磁場を規定する複数の補償パラメータを求め、
前記傾斜磁場発生部は、前記複数の補償パラメータに基づいて、前記補償磁場を発生することを特徴とする磁気共鳴イメージング装置。 - 傾斜磁場を発生する傾斜磁場発生部と、
前記傾斜磁場発生部を制御して所定のパルスシーケンスに規定された傾斜磁場を被検体に印加し、該被検体からのエコー信号の計測を制御する計測制御部と、
前記エコー信号を演算処理して前記被検体の画像を再構成する演算処理部と、を有して、
前記計測制御部は、前記傾斜磁場と共に、該傾斜磁場の印加に伴って発生する渦電流に基づく渦電流磁場を補償する補償磁場を、前記傾斜磁場発生部に発生させる磁気共鳴イメージング装置であって、
前記演算処理部は、
テスト傾斜磁場が印加されて計測されたエコー信号を用いて位相画像を再構成し、
前記テスト傾斜磁場の印加方向と該印加方向と異なる方向とにそれぞれ発生する渦電流磁場を前記位相画像に基づいて求め、
前記求めた各方向の渦電流磁場に基づいて、任意の傾斜磁場の印加に伴う渦電流磁場を方向毎に補償する補償磁場をそれぞれ求め、
前記計測制御部は、前記任意の傾斜磁場と共に、前記求めた方向毎の補償磁場をそれぞれ発生するよう前記傾斜磁場発生部を制御することを特徴とする磁気共鳴イメージング装置。 - テスト傾斜磁場を印加して計測されたエコー信号に基づいて、任意の傾斜磁場の印加に伴う渦電流磁場を補償する補償磁場を求めて、前記任意の傾斜磁場と共に前記補償磁場を発生する渦電流補償方法であって、
前記テスト傾斜磁場の印加方向と、該印加方向と異なる方向とに、それぞれ発生する渦電流磁場を画像の位相を介して計測する渦電流磁場計測ステップと、
前記計測された各方向の渦電流磁場に基づいて、前記任意の傾斜磁場の印加に伴う渦電流磁場を該方向毎に補償する補償磁場をそれぞれ求める補償磁場算出ステップと、
前記任意の傾斜磁場と共に、前記求めた方向毎の補償磁場をそれぞれ発生する補償磁場発生ステップと、
を有することを特徴とする渦電流補償方法。 - 請求項14記載の渦電流補償方法において、
前記渦電流磁場計測ステップは、所定の一方向に垂直な一対のスライス位置でそれぞれ計測したエコー信号に基づいて、前記所定の一方向と該所定の一方向に垂直な方向についての渦電流磁場を計測することを特徴とする渦電流補償方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011518507A JP5718228B2 (ja) | 2009-06-10 | 2010-06-04 | 磁気共鳴イメージング装置及び渦電流補償方法 |
| US13/377,275 US9297876B2 (en) | 2009-06-10 | 2010-06-04 | Magnetic resonance imaging apparatus and eddy current compensation method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009-138785 | 2009-06-10 | ||
| JP2009138785 | 2009-06-10 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010143586A1 true WO2010143586A1 (ja) | 2010-12-16 |
Family
ID=43308841
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2010/059501 WO2010143586A1 (ja) | 2009-06-10 | 2010-06-04 | 磁気共鳴イメージング装置及び渦電流補償方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9297876B2 (ja) |
| JP (1) | JP5718228B2 (ja) |
| WO (1) | WO2010143586A1 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012183233A (ja) * | 2011-03-07 | 2012-09-27 | Toshiba Corp | 磁気共鳴イメージング装置 |
| WO2013002232A1 (ja) * | 2011-06-30 | 2013-01-03 | 株式会社 日立メディコ | 磁気共鳴イメージング装置及びその傾斜磁場出力波形の測定方法 |
| JP2016067895A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社東芝 | 磁気共鳴イメージング装置及び磁気共鳴イメージング方法 |
| JP2020174960A (ja) * | 2019-04-19 | 2020-10-29 | 株式会社日立製作所 | 磁気共鳴イメージング装置及び誤差磁場の補償方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9453897B2 (en) * | 2010-08-26 | 2016-09-27 | Hitachi Medical Corporation | Magnetic resonance imaging apparatus and vibrational error magnetic field reduction method |
| JP5971683B2 (ja) * | 2011-03-15 | 2016-08-17 | 東芝メディカルシステムズ株式会社 | 磁気共鳴イメージング装置 |
| KR101473872B1 (ko) * | 2013-02-05 | 2014-12-18 | 삼성전자 주식회사 | 자기공명영상장치 및 그 제어방법 |
| KR101474757B1 (ko) | 2013-07-08 | 2014-12-19 | 삼성전자주식회사 | 자장 측정 방법 및 장치 |
| US9911062B1 (en) * | 2015-10-20 | 2018-03-06 | Ohio State Innovation Foundation | Background phase correction for quantitative cardiovascular MRI |
| DE102018200239B4 (de) * | 2018-01-09 | 2022-09-22 | Siemens Healthcare Gmbh | Verfahren und Magnetresonanzanlage zur Artefaktvermeidung un-ter Bestimmung von einer von Wirbelströmen hervorgerufenen Phasendifferenz für eine Magnetresonanzanlage |
| WO2020139476A2 (en) | 2018-12-28 | 2020-07-02 | Hyperfine Research, Inc. | Correcting for hysteresis in magnetic resonance imaging |
| DE102019209079A1 (de) | 2019-06-24 | 2020-12-24 | Siemens Healthcare Gmbh | Verfahren zur Vermessung von Wirbelstromfeldern in einer Magnetresonanzeinrichtung, Magnetresonanzeinrichtung, Computerprogramm und elektronisch lesbarer Datenträger |
| US11698430B2 (en) * | 2019-08-15 | 2023-07-11 | Hyperfine Operations, Inc. | Eddy current mitigation systems and methods |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10272120A (ja) * | 1996-12-30 | 1998-10-13 | General Electric Co <Ge> | 磁気共鳴システムの磁場を補償する方法 |
| JP2003111744A (ja) * | 2001-10-02 | 2003-04-15 | Hitachi Ltd | 核磁気共鳴を用いた検査装置及び傾斜磁場波形の調整方法 |
| WO2004004563A1 (ja) * | 2002-07-04 | 2004-01-15 | Hitachi Medical Corporation | 磁気共鳴イメージング装置 |
| JP2005288026A (ja) * | 2004-04-05 | 2005-10-20 | Toshiba Corp | 磁気共鳴イメージング装置、渦磁場分布推定方法、及び静磁場補正方法 |
| JP2006102541A (ja) * | 2006-01-10 | 2006-04-20 | Toshiba Corp | 磁気共鳴イメージング装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5742164A (en) * | 1995-12-28 | 1998-04-21 | General Electric Company | Misalignment compensation for MR gradient coil assembly |
| US6448773B1 (en) * | 2000-02-24 | 2002-09-10 | Toshiba America Mri, Inc. | Method and system for measuring and compensating for eddy currents induced during NMR imaging operations |
| US7112964B2 (en) * | 2004-08-02 | 2006-09-26 | General Electric Company | Eddy current measurement and correction in magnetic resonance imaging systems with a static phantom |
| US7323872B1 (en) * | 2006-04-06 | 2008-01-29 | General Electric Company | Method and apparatus of directly measuring cross-axis eddy currents for MR scanner calibration |
| US8008915B2 (en) * | 2007-12-28 | 2011-08-30 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus and magnetic resonance imaging method |
| JP5394374B2 (ja) * | 2008-05-22 | 2014-01-22 | 株式会社日立メディコ | 磁気共鳴イメージング装置及び血管画像取得方法 |
| US8030923B2 (en) * | 2009-03-31 | 2011-10-04 | General Electric Company | Method and system to perform phase correction for species separation in magnetic resonance imaging |
-
2010
- 2010-06-04 US US13/377,275 patent/US9297876B2/en active Active
- 2010-06-04 WO PCT/JP2010/059501 patent/WO2010143586A1/ja active Application Filing
- 2010-06-04 JP JP2011518507A patent/JP5718228B2/ja active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10272120A (ja) * | 1996-12-30 | 1998-10-13 | General Electric Co <Ge> | 磁気共鳴システムの磁場を補償する方法 |
| JP2003111744A (ja) * | 2001-10-02 | 2003-04-15 | Hitachi Ltd | 核磁気共鳴を用いた検査装置及び傾斜磁場波形の調整方法 |
| WO2004004563A1 (ja) * | 2002-07-04 | 2004-01-15 | Hitachi Medical Corporation | 磁気共鳴イメージング装置 |
| JP2005288026A (ja) * | 2004-04-05 | 2005-10-20 | Toshiba Corp | 磁気共鳴イメージング装置、渦磁場分布推定方法、及び静磁場補正方法 |
| JP2006102541A (ja) * | 2006-01-10 | 2006-04-20 | Toshiba Corp | 磁気共鳴イメージング装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012183233A (ja) * | 2011-03-07 | 2012-09-27 | Toshiba Corp | 磁気共鳴イメージング装置 |
| US9157973B2 (en) | 2011-03-07 | 2015-10-13 | Kabushiki Kaisha Toshiba | Magnetic resonance imaging apparatus |
| WO2013002232A1 (ja) * | 2011-06-30 | 2013-01-03 | 株式会社 日立メディコ | 磁気共鳴イメージング装置及びその傾斜磁場出力波形の測定方法 |
| JPWO2013002232A1 (ja) * | 2011-06-30 | 2015-02-23 | 株式会社日立メディコ | 磁気共鳴イメージング装置及びその傾斜磁場出力波形の測定方法 |
| JP2016067895A (ja) * | 2014-09-30 | 2016-05-09 | 株式会社東芝 | 磁気共鳴イメージング装置及び磁気共鳴イメージング方法 |
| JP2020174960A (ja) * | 2019-04-19 | 2020-10-29 | 株式会社日立製作所 | 磁気共鳴イメージング装置及び誤差磁場の補償方法 |
| JP7253433B2 (ja) | 2019-04-19 | 2023-04-06 | 富士フイルムヘルスケア株式会社 | 磁気共鳴イメージング装置及び誤差磁場の補償方法 |
| US11789101B2 (en) | 2019-04-19 | 2023-10-17 | Fujifilm Healthcare Corporation | Magnetic resonance imaging apparatus and method of compensating for error magnetic field |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5718228B2 (ja) | 2015-05-13 |
| US9297876B2 (en) | 2016-03-29 |
| JPWO2010143586A1 (ja) | 2012-11-22 |
| US20120098535A1 (en) | 2012-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5718228B2 (ja) | 磁気共鳴イメージング装置及び渦電流補償方法 | |
| JP5189203B2 (ja) | 磁気共鳴装置 | |
| KR101657331B1 (ko) | Mr 이미지들 내의 위상 정보를 수정하기 위한 방법 및 대응하는 자기 공명 시스템 | |
| KR101473872B1 (ko) | 자기공명영상장치 및 그 제어방법 | |
| JP4106053B2 (ja) | 磁気共鳴イメージング装置及び渦電流補償導出方法 | |
| US10031205B2 (en) | Magnetic resonance imaging apparatus and magnetic resonance imaging method | |
| JP6038654B2 (ja) | 磁気共鳴イメージング装置及び振動誤差磁場低減方法 | |
| JP6072825B2 (ja) | Mr画像法において高次のbo場の不均一性を補正するための傾斜磁場コイルの使用 | |
| JP6017443B2 (ja) | 磁気共鳴イメージング装置および照射磁場分布計測方法 | |
| JP5177379B2 (ja) | 磁気共鳴イメージング装置 | |
| JP5808659B2 (ja) | 磁気共鳴イメージング装置及びT1ρイメージング法 | |
| JPS62189056A (ja) | 磁界の均質性を改善する方法 | |
| JP6718764B2 (ja) | 磁気共鳴イメージング装置及びその制御方法 | |
| JP5064685B2 (ja) | 磁気共鳴イメージング装置 | |
| JP2022055893A (ja) | 磁気共鳴イメージング装置、被検体位置合わせ装置、および、被検体位置合わせ方法 | |
| JP6084430B2 (ja) | 再収束rfパルスのフリップ角制御法及び磁気共鳴イメージング装置 | |
| US9915713B2 (en) | Determining positions of a magnetic field probe in a magnetic resonance measurement | |
| JP6579908B2 (ja) | 磁気共鳴イメージング装置及び拡散強調画像計算方法 | |
| Schwerter et al. | Advanced software and hardware control methods for improved static and dynamic $ B_ {0} $ shimming in magnetic resonance imaging | |
| JP2012095891A (ja) | 磁気共鳴イメージング装置 | |
| JP2014087442A5 (ja) | ||
| JP4969933B2 (ja) | 磁気共鳴イメージング装置 | |
| JP4399658B2 (ja) | 磁気共鳴撮像装置 | |
| JP2016131847A (ja) | 磁気共鳴イメージング装置および磁気共鳴イメージング方法 | |
| Fillmer | Hardware and Algorithmic Advances in B₀ Shimming for High and Ultra-High Field MRI and MRS |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 10786117 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2011518507 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 13377275 Country of ref document: US |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 10786117 Country of ref document: EP Kind code of ref document: A1 |