WO2010001947A1 - 静電容量検出型の可動センサ - Google Patents
静電容量検出型の可動センサ Download PDFInfo
- Publication number
- WO2010001947A1 WO2010001947A1 PCT/JP2009/062082 JP2009062082W WO2010001947A1 WO 2010001947 A1 WO2010001947 A1 WO 2010001947A1 JP 2009062082 W JP2009062082 W JP 2009062082W WO 2010001947 A1 WO2010001947 A1 WO 2010001947A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- movable
- link
- support
- connection
- electrode
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims description 21
- 230000008859 change Effects 0.000 claims abstract description 29
- 230000001133 acceleration Effects 0.000 claims description 15
- 238000013459 approach Methods 0.000 claims description 5
- 239000000463 material Substances 0.000 claims description 5
- 239000004020 conductor Substances 0.000 claims description 3
- 230000004044 response Effects 0.000 claims description 2
- 230000008878 coupling Effects 0.000 abstract description 8
- 238000010168 coupling process Methods 0.000 abstract description 8
- 238000005859 coupling reaction Methods 0.000 abstract description 8
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 19
- 229910052710 silicon Inorganic materials 0.000 description 19
- 239000010703 silicon Substances 0.000 description 19
- 239000000758 substrate Substances 0.000 description 16
- 239000003990 capacitor Substances 0.000 description 12
- 230000007935 neutral effect Effects 0.000 description 8
- 238000009499 grossing Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 4
- 230000005484 gravity Effects 0.000 description 3
- 238000007747 plating Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 238000004544 sputter deposition Methods 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000000708 deep reactive-ion etching Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000008569 process Effects 0.000 description 2
- 230000003068 static effect Effects 0.000 description 2
- 244000126211 Hericium coralloides Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 230000008646 thermal stress Effects 0.000 description 1
Images











Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
- G01P15/125—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values by capacitive pick-up
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P15/00—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration
- G01P15/02—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses
- G01P15/08—Measuring acceleration; Measuring deceleration; Measuring shock, i.e. sudden change of acceleration by making use of inertia forces using solid seismic masses with conversion into electric or magnetic values
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10D—INORGANIC ELECTRIC SEMICONDUCTOR DEVICES
- H10D48/00—Individual devices not covered by groups H10D1/00 - H10D44/00
- H10D48/50—Devices controlled by mechanical forces, e.g. pressure
Definitions
- the present invention detects the amount of movement of a movable part formed by cutting from a silicon substrate based on the change in capacitance between electrodes, thereby enabling measurement of physical quantities such as acceleration acting from the outside.
- the electrostatic capacity detection type movable sensor is a movable sensor.
- a silicon substrate is etched to form a movable portion that operates in a surface direction or a direction orthogonal to the surface, and the movable portion provided in the movable portion is provided.
- the amount of movement of the movable part can be measured by detecting the capacitance between the electrode and the fixed electrode facing the movable electrode.
- this type of sensor Since this type of sensor has a small movable part, it is necessary to devise the structure of the electrode in order to grasp the moving amount of the movable part with high accuracy by the change in capacitance between the electrodes.
- the conventional sensors described in the following patent documents are provided in the movable part by making the movable part and the fixed part into a fine comb-tooth shape, and engaging the comb teeth of the movable part and the comb teeth of the fixed part.
- the opposing area between the movable electrode and the fixed electrode provided in the fixed portion can be made as wide as possible.
- the structure in which the movable portion and the fixed portion are both comb-shaped and meshed with each other is complicated, and the processing cost increases.
- a movable electrode is provided on both the front surface and the back surface of the movable portion, a fixed electrode facing the movable electrode on the front surface side, and a fixed electrode facing the movable electrode on the back surface side are provided.
- a method for obtaining a difference between the change in capacitance between the other movable electrode and the change in capacitance between the other movable electrode and the fixed electrode is conceivable. In this method, not only can the detection sensitivity be increased by obtaining the difference in capacitance change obtained by the movable electrodes provided on both surfaces of the movable electrode, but also the detection output of the capacitance changing on the positive side. By obtaining the difference between the detection outputs of the capacitances that change on the negative side, fluctuation components and noise components due to environmental changes such as temperature changes can be canceled, so that there is an advantage that a high-quality detection output can be obtained.
- the present invention solves the above-described conventional problems, and uses a plurality of movable electrodes provided on one side of the movable part to detect the difference in capacitance detection output that changes to the opposite side. It is an object of the present invention to provide a capacitance detection type movable sensor that can be obtained and has a simple structure, can cancel noise, and can obtain a highly sensitive output.
- the present invention provides a movable sensor in which electrodes facing each other are provided on the movable part and the fixed part, and the change in electrostatic capacitance between the electrodes when the movable part approaches or separates from the fixed part, A first movable portion and a second movable portion; and a link portion rotatably connected to each of the two movable portions, wherein the link portion is connected to the first movable portion;
- a fulcrum is set between the connecting part with the second movable part, and the link part rotates around the fulcrum, one of the first movable part and the second movable part is Operable to approach the fixed part and the other away from the fixed part;
- the first movable part is provided with a first movable electrode
- the second movable part is provided with a second movable electrode on a surface facing the same direction of each movable part
- the fixed part includes the first movable electrode.
- the capacitance between the first movable part and the fixed part is reduced.
- the change and the change in the capacitance between the second movable part and the fixed part are the opposite outputs.
- the movable electrode is provided on the same surface of the first movable portion and the second movable portion, the electrode can be easily formed.
- movable electrodes are provided on both the front and back surfaces of the first movable portion, movable electrodes are provided on both the front and back surfaces of the second movable portion, and the movable electrodes on the front and back surfaces are provided on the fixed portion side.
- the structure is somewhat complicated by providing movable electrodes on the front and back of the movable part and providing fixed electrodes on the respective fixed parts facing the front and back surfaces of the movable part.
- the same phase change of the capacitance detected by the electrodes on all surfaces is added, and the difference in the phase change opposite to each other is obtained to further increase the sensitivity and cancel the noise. It is possible to obtain the detected output.
- the present invention provides a change in capacitance between the first movable electrode and the first fixed electrode, and a change in capacitance between the second movable electrode and the second fixed electrode. It has a detection circuit which calculates
- one of the mass of the first movable part and the mass of the second movable part is larger than the other, and the movable part having a large mass moves in response to an acceleration given from the outside.
- the movable part having a small mass can be configured to move in the opposite direction to the movable part having a large mass.
- an acceleration sensor can be configured by configuring so that one movable part having a large mass reacts with acceleration. Further, if the mass of one movable part is larger than the mass of the other movable part, when the posture of the movable sensor is changed with respect to the direction of gravity, the movable part having a large mass moves in the gravity direction, The amount of movement at this time can be detected. In this way, the movable sensor can be used for posture measurement with respect to the direction of gravity.
- the first movable portion and the second movable portion have the same thickness, and the front and back surfaces of the first movable portion and the second movable portion are flush with each other.
- the link portion and the support portion that rotatably supports the link portion are within the thickness range of the front surface and the back surface.
- the first movable portion, the second movable portion, the link portion, and the support portion are cut out from the same plate material.
- the present invention provides a connection portion between the first movable portion and the link portion, a connection portion between the second movable portion and the link portion, and the fulcrum between the link portion and the support portion.
- the connecting portion is rotatably connected between the respective members via a torsion bar formed by a part of the plate material.
- the members When the torsion bar is used, the members can be connected to each other in a freely rotatable manner, and can be restored to a static posture by the elastic force of the torsion bar when no external force is applied.
- an extremely small and thin movable sensor can be configured by cutting out the first movable portion, the second movable portion, the link portion, and the support portion from one plate material such as a silicon substrate.
- the first movable portion and the second movable portion are formed of a conductive material, the first movable portion itself functions as the first movable electrode, and the second movable portion The part itself can be configured to function as the second movable electrode.
- the link part a right connection link part and a left connection link part extending in the front-rear direction (X) with a space in the left-right direction (Y) are provided, and the right connection link part is a right fulcrum.
- the left connecting link portion is rotatably supported by the first left support portion via the left fulcrum, and is rotatably supported by the first right support portion.
- any one of the connecting portion between the right connecting link portion and the first movable portion, and the connecting portion between the left connecting link portion and the first movable portion is located forward (X1), and the other is Located behind (X2)
- the connecting portion between the right connecting link portion and the second movable portion is located on the reverse side of the connecting portion between the right connecting link portion and the first movable portion across the right fulcrum
- the connecting portion between the left connecting link portion and the second movable portion is located on the reverse side of the connecting portion between the left connecting link portion and the first movable portion, with the left fulcrum in between.
- the first right support part and the first left support part may be configured to be fixed to the fixing part.
- the first movable portion and the second movable portion can be operated in an upside down direction while maintaining a substantially horizontal posture.
- a right outer support link portion is rotatably connected to the first right support portion and the first movable portion, and the right outer support link portion and the first movable portion are connected to each other.
- the connecting portion is located on the reverse side of the connecting portion between the right connecting link portion and the first movable portion
- a left outer support link portion is rotatably connected to the first left support portion and the first movable portion
- a connection portion between the left outer support link portion and the first movable portion is the left side. It is preferable that the connecting link portion and the first movable portion are located on the reverse side of the connecting portion.
- the present invention is provided with a second right support part and a second left support part, A right inner support link portion is rotatably connected to the second right support portion and the second movable portion, and a connection portion between the right inner support link portion and the second movable portion is the right side.
- a left inner support link portion is rotatably connected to the second left support portion and the second movable portion, and a connection portion between the left inner support link portion and the second movable portion is the left side. It is preferable that the connecting link portion and the second movable portion are located on the opposite side of the connecting portion.
- the first The movable part and the second movable part can be moved up and down in a stable horizontal posture.
- the first right support part and the first left support part are arranged on the same line extending in the left-right direction (Y).
- first right support portion and the first left support portion, and the second right support portion and the second left support portion are on the same line extending in the left-right direction (Y). It is preferable to arrange
- the first right support part and the first left support part are arranged on the same line in the left-right direction, and further, the first right support part, the first left support part, and the By arranging the second right support portion and the second left support portion on the same line in the left-right direction, the first movable member can be used even when the fixed portion is distorted by heat or distorted by external force. And the second movable part can easily maintain an appropriate neutral position.
- a right outer support link portion is rotatably connected to the right connection link portion via an inter-link connection portion
- a left outer support link portion is connected to the left connection link portion via an inter-link connection portion.
- the connecting portion between the right outer support link portion and the first movable portion is located on the reverse side of the connecting portion between the right connecting link portion and the first movable portion across the link connecting portion.
- the connecting portion between the left outer support link portion and the first movable portion is located on the opposite side of the connecting portion between the left connecting link portion and the first movable portion with the inter-link connecting portion interposed therebetween.
- the connecting portion between the right outer support link portion and the first movable portion, and the connecting portion between the left outer support link portion and the first movable portion can be configured to be located on the reverse side in the front-rear direction. .
- a right inner support link portion is rotatably connected to the right connection link portion via an inner link connection portion
- a left inner support link portion is connected to the left link via an inner link connection portion. It is pivotally connected to the link part
- the connecting portion between the right inner support link portion and the second movable portion is opposite to the front and rear side of the connecting portion between the right connecting link portion and the second movable portion with the inner link connecting portion interposed therebetween.
- Position to, The connecting portion between the left inner support link portion and the second movable portion is opposite to the front and rear side of the connecting portion between the left connecting link portion and the second movable portion with the inner link connecting portion interposed therebetween.
- the connecting portion between the right inner support link portion and the second movable portion and the connecting portion between the left inner support link portion and the second movable portion are positioned on the front and rear reverse sides.
- the second inner right support link portion and the right connection link portion are rotatably connected, and the left inner support link portion and the left connection link portion are rotatably connected, thereby providing the second right support. It is not necessary to provide the portion and the second left support portion. By reducing the number of support portions, even if distortion due to heat or distortion due to external force occurs in the fixed portion, it is possible to prevent differences in height positions or differences in inclination between the support portions. It becomes easy to stabilize the operation posture of the movable part and the second movable part.
- the inter-link connecting portion and the inner inter-link connecting portion are arranged on the same line extending in the left-right direction (Y).
- the link part operates in a balanced manner.
- the movable sensor according to the present invention since the first movable part and the second movable part move in opposite directions, the movable electrode provided on the surfaces of the first movable part and the second movable part facing in the same direction from the movable electrode.
- the change in capacitance can be extracted in the opposite phase. Therefore, by obtaining the difference, it is possible to obtain a detection output that is highly sensitive and offsets fluctuation components such as noise due to temperature changes.
- the movable sensor of the present invention can be configured to be extremely small and thin.
- the perspective view which shows the state which the movable sensor of the 2nd Embodiment of this invention has stopped The perspective view which shows the state which the movable sensor of the 2nd Embodiment of this invention is operating, A circuit diagram showing a detection circuit,
- the top view which shows the state which the movable sensor of the 3rd Embodiment of this invention has stopped The perspective view which shows the state which the movable sensor of the 3rd Embodiment of this invention is operating,
- the top view which shows the state which the movable sensor of the 4th Embodiment of this invention has stopped The perspective view which shows the state which the movable sensor of the 4th Embodiment of this invention is operating,
- the Y direction is the left-right direction
- the Y1 direction is the right direction
- the Y2 direction is the left direction
- the X direction is the front-rear direction
- the X1 direction is the front
- the X2 direction is the rear.
- the direction perpendicular to both the Y direction and the X direction is the vertical direction.
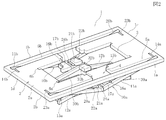
- the movable sensor 1 shown in FIG. 1 is formed from a silicon substrate that is a rectangular flat plate. That is, a planar resist layer corresponding to the shape of each member is formed on the silicon substrate, and the silicon substrate is etched by deep RIE (deep reactive ion etching) or the like at a portion where the resist layer does not exist. Each member is separated by cutting in the process. Therefore, each member which comprises the movable sensor 1 is comprised within the range of the thickness of the surface of a silicon substrate, and a back surface. As shown in FIG. 1, when the movable sensor is in a stationary state, the first movable part and the second movable part have their front and back surfaces located on the same plane, and the other members are , Not protruding from the front and back surfaces.
- the movable sensor 1 is very small.
- the long sides 1a and 1b of the rectangle have a length of 1 mm or less
- the short sides 1c and 1d have a length of 0.8 mm or less.
- the thickness dimension is 0.1 mm or less.
- an outer frame portion surrounded by rectangular long sides 1a and 1b and short sides 1c and 1d is a first movable portion 2.
- the direction in which the long sides 1a, 1b extend is the front-rear direction, and the direction in which the short sides 1c, 1d extend is the left-right direction.
- a rectangular central hole 3 is formed vertically through the central portion of the first movable portion 2, and a second movable portion 4 is formed inside the central hole 3.
- the second movable part 4 is substantially rectangular, and the first movable part 2 and the second movable part 4 are independent of each other.
- the surface 2a of the first movable part 2 and the surface 4a of the second movable part 4 are the same surface, and the back surface 2b of the first movable part 2 and the second surface
- the back surface 4b (refer FIG. 3) of the movable part 4 is the same surface.
- the area of the surface 2 a of the first movable part 2 is larger than the area of the surface 4 a of the second movable part 4, and the mass of the first movable part 2 is larger than the mass of the second movable part 4.
- the mass of the first movable part 2 is more than twice the mass of the second movable part 4.
- a long hole 5a extending along the long side 1a is formed inside the long side 1a on the right side (Y1 side) of the rectangle, and a long side extending along the long side 1b inside the long side 1b on the left side (Y2 side).
- a hole 5b is formed.
- an elongated gap 6a between the long side of the central hole 3 of the second movable part and the long side of the second movable part 4 is parallel to the long hole 5a inside the right long hole 5a. Is formed.
- An elongated gap 6b between the long side of the central hole 3 and the long side of the second movable portion 4 is formed in parallel to the long hole 5b inside the left long hole 5b.
- a right connecting link portion 10a is provided inside the right long side 1a.
- the planar shape of the right connection link portion 10a is a crank shape, and the first connection arm 11a extending forward (X1 direction), the second connection arm 12a extending rearward (X2 direction), and the intermediate connection portion 13a are integrally formed. Is formed.
- the first connecting arm 11a is formed by being cut out from the silicon substrate inside the elongated hole 5a extending inside the long side 1a, and the second connecting arm 12a extends inside the elongated hole 5a.
- the gap 6a is cut out from the silicon substrate.
- the 1st connection arm 11a and the 2nd connection arm 12a are integrally connected by the intermediate connection part 13a of the direction orthogonal to these.
- a front end portion (X1 direction) of the first connecting arm 11a of the right connecting link portion 10a and the first movable portion 2 are rotatably connected to each other at the connecting portion 14a.
- the distal end of the second connecting arm 12a (in the X2 direction) and the second movable portion 4 are rotatably connected at the connecting portion 15a.
- a first right support portion 17a is independently cut out at a portion adjacent to the first connecting arm 11a and the intermediate connecting portion 13a of the right connecting link portion 10a, and the first connecting link portion 10a has a first portion.
- the connecting arm 11a and the first right support portion 17a are rotatably connected at the fulcrum connecting portion 16a.
- a left connecting link portion 10b is provided inside the left long side 1b.
- the left connecting link portion 10b is point-symmetric with the right connecting link portion 10a, and includes a first connecting arm 11b extending rearward (X2 direction), a second connecting arm 12b extending forward (X1 direction), and an intermediate connecting portion. 13b is integrally formed.
- the first connecting arm 11b is positioned inside the elongated hole 5b extending inside the long side 1b
- the second connecting arm 12b is positioned inside the gap 6b extending inside the elongated hole 5b.
- the 1st connection arm 11b and the 2nd connection arm 12b are integrally connected by the intermediate connection part 13b of the direction orthogonal to these.
- the front end portion in the rear (X2) direction of the first connecting arm 11b of the left connecting link portion 10b and the first movable portion 2 are rotatably connected at the connecting portion 14b.
- a front end portion (X1 direction) of the second connecting arm 12b of the left connecting link portion 10b and the second movable portion 4 are rotatably connected at the connecting portion 15b.
- a first left support portion 17b is cut out independently from a portion of the left connection link portion 10b adjacent to the first connection arm 11b and the intermediate connection portion 13b.
- the connecting arm 11b and the first left support portion 17b are rotatably connected at the fulcrum connecting portion 16b.
- a groove 18a is formed in the first movable portion 2, and in the groove 18a, the first connecting arm 11a of the right connecting link portion 10a, A torsion bar 19 a that connects one movable part 2 is provided.
- the torsion bar 19a is made of silicon, like the first movable part 2 and the right connection link part 10a. That is, when the rectangular silicon substrate is etched to separate the first movable part 2 and the right connection link part 10a, the silicon substrate is connected so that the first movable part 2 and the first connection arm 11a are connected.
- the torsion bar 19a is formed by processing silicon into a cylindrical shape or a prismatic shape while leaving a portion of the torsion bar 19a.
- a groove 18b is formed between the first movable portion 2 and the first right support portion 17a, and the right connecting link is formed in the groove 18b.
- the part 10a and the first right support part 17a are connected by a torsion bar 19b made of silicon.
- the torsion bar 19a is twisted, whereby the first connecting arm 11a and the first movable portion 2 are relatively rotated.
- the right connection link part 10a and the 1st right side support part 17a rotate relatively because the torsion bar 19b twists and deforms.
- the silicon forming the torsion bars 19a and 19b is an elastic material, when an external force is not acting on the first movable part 2 or the like, as shown in FIGS. 1 and 4, the torsion bar 19a , 19b is restored so that the surface 2a of the first movable part 2 and the surface of the first connecting arm 11a are flush with each other.
- a torsion bar is also integrally formed in the connecting portion 15a that connects the second connecting arm 12a and the second movable portion 4 of the right connecting link portion 10a. Further, a torsion bar is integrally formed on the left connecting link portion 10b, the connecting portions 14b and 15b connecting the first movable portion 2 and the second movable portion 4 and the fulcrum connecting portion 16b in the same manner. Thus, a rotating part having an elastic restoring force is formed.
- a right outer support link portion 20a is cut out and provided at a portion where the first connecting arm 11a of the right connecting link portion 10a does not exist. Yes.
- a second right support portion 21a is cut out and provided between the right outer support link portion 20a and the second connection arm 12a of the right connection link portion 10a.
- the base part which faces the front (X1 direction) of the right outer side support link part 20a and the 2nd right side support part 21a are connected rotatably by the fulcrum connection part 22a.
- a groove 18c is formed between the second right support portion 21a and the first movable portion 2, and the right outer support link is formed in the groove 18c.
- a torsion bar 19c that connects the portion 20a and the second right support portion 21a is integrally formed of silicon.
- a rotation support portion that exhibits an elastic restoring force by the elastic force of the torsion bar 19c is formed.
- tip part which faces the back (X2 direction) of the right outer side support link part 20a, and the 1st movable part 2 are connected by the connection part 23a.
- the right outer side support link part 20a and the 2nd movable part 4 are connected with the torsion bar.
- the right outer support link portion 20a and the intermediate connection portion 13a of the right connection link portion 10a are connected by an inter-link connection portion 24a.
- a groove 18d is formed in the inter-link connecting portion 24a, and the torsion for connecting the right outer support link portion 20a and the intermediate connecting portion 13a of the right connecting link portion 10a in the groove 18d.
- a bar 19d is integrally formed.
- the right connection link portion 10a rotates with the torsion bar 19b of the fulcrum connection portion 16a as a fulcrum
- the right outer support link portion 20a rotates with the torsion bar 19c of the fulcrum connection portion 22a as a fulcrum, but the interlink connection portion 24a.
- the torsion bar 19d is located at the midpoint of the distance between the two torsion bars 19b and the torsion bar 19c.
- the torsion bar 19d of the interlink connecting portion 24a gives an elastic restoring force to return each to a horizontal posture.
- the left outer support link portion 20b is cut out in the long hole 5b inside the left long side 1b at the portion where the first connecting arm 11b of the left connecting link portion 10b is not present. Is provided.
- the shape and support structure of the left outer support link portion 20b are point-symmetric with the right outer support link portion 20a.
- a base portion facing rearward (X2 direction) of the left outer support link portion 20b and the second left support portion 21b are connected by a fulcrum connecting portion 22b, and a front end facing the front side (X1 direction) of the left outer support link portion 20b.
- the part and the second movable part 4 are rotatably connected by a connecting part 23b.
- intermediate connecting portion 13b of the left connecting link portion 10b and the left outer support link portion 20b are connected by an inter-link connecting portion 24b.
- a torsion bar is integrally formed in each of the fulcrum connecting portion 22b, the connecting portion 23b, and the inter-link connecting portion 24b as in FIG.
- a right inner support link portion 30a is cut out and provided at a portion where the second connecting arm 12a of the right connecting link portion 10a does not exist. ing. Inside the right inner support link part 30a, a third right support part 31a formed by cutting out a part of the second movable part 4 is provided. The right inner support link portion 30a and the third right support portion 31a are rotatably connected by a fulcrum connection portion 32a. As shown in FIG. 5, a groove 18e is formed in the fulcrum connecting portion 32a, and a torsion bar 19e for connecting the right inner support link portion 30a and the third right support portion 31a is integrally formed in the groove 18e. Is formed.
- the torsion bar 19e provided in the fulcrum connecting part 32a is positioned coaxially with the torsion bar 19c connecting the right outer support link part 20a and the second right support part 21a.
- the front end portion of the right inner support link portion 30a facing the front (X1 direction) and the second movable portion 4 are rotatably connected by a connecting portion 33a.
- the connecting portion 33a is also provided with a torsion bar.
- a left inner support link portion 30b is cut out and provided at a portion where the second connecting arm 12b of the left connecting link portion 10b does not exist.
- the shape and support structure of the left inner support link portion 30b are point-symmetric with the right inner support link portion 30a.
- a third left support portion 31b formed by cutting out a part of the second movable portion 4 is provided, and the left inner support link portion 30b and the third left support portion are provided.
- the part 31b is rotatably connected by a fulcrum connecting part 32b.
- tip part which faces the back (X2 direction) of the left inner side support link part 30b, and the 2nd movable part 4 are connected by the connection part 33b.
- the torsion bar is also integrally formed in the fulcrum connecting portion 32b and the connecting portion 33b.
- the movable sensor 1 is provided with a fixed portion 50 facing the surface 2 a of the first movable portion 2 and the surface 4 a of the second movable portion 4.
- a support body (not shown) is integrally formed on the lower surface 50a of the fixed portion 50, and by this support body, the first right support portion 17a, the first left support portion 17b, and the second right support portion 21a.
- the second left support portion 21b, the third right support portion 31a, and the third left support portion 31b are fixed and supported.
- the support portions 17a, 17b, 21a, 21b, 31a, 31b are supported and fixed so that the surfaces thereof are located on the same plane.
- the fixed portion 50 Separately from the fixed portion 50, there are provided fixed portions that oppose the back surface 2b of the first movable portion 2 and the back surface 4b of the second movable portion 4, and the support members integrally extending from the fixed portion respectively
- the back surfaces of the support portions 17a, 17b, 21a, 21b, 31a, 31b may be fixedly supported.
- the first movable portion as shown in FIGS. 2 and 3 with the support portions 17a, 17b, 21a, 21b, 31a, 31b fixed so as not to move.
- a moving space in which 2 and the second movable part 4 can move up and down is formed.
- first fixed electrodes 51, 51 and a second fixed electrode 52 are provided on the lower surface of the fixed portion 50.
- the fixed portion 50 is a silicon substrate or the like, and each fixed electrode 51, 51, 52 is formed by sputtering or plating a conductive metal material on the lower surface 50a of the fixed portion 50 via an insulating layer.
- a first movable electrode facing the first fixed electrodes 51, 51 is formed by a sputtering or plating process via an insulating layer.
- a second movable electrode facing the second fixed electrode 52 is formed on the surface 4a of the second movable portion 4 by sputtering or plating with an insulating layer interposed therebetween.
- the first movable electrode provided in the first movable part 2 and the second movable electrode provided in the second movable part 4 are independent electrodes that are not electrically connected to each other.
- the first fixed electrodes 51 and 51 and the second fixed electrode 52 provided in the fixed portion 50 may be electrodes independent of each other, or the first fixed electrodes 51 and 51 and the first fixed electrodes 52
- the two fixed electrodes 52 may be formed integrally with each other or may be a common fixed electrode that is electrically connected to each other.
- the first movable part 2 and the second movable part 4 are formed of a conductive material such as a silicon substrate, the first movable part 2 itself is used as the first movable electrode.
- the second movable part 4 itself can be used as the second movable part.
- the first movable portion 2 and the second movable portion 4 are integrally formed from the same substrate, the first movable electrode and the second movable electrode are common movable electrodes that are electrically connected to each other.
- the first fixed electrode 51, 51 and the second fixed electrode 52 are independent electrodes that are not electrically connected to each other, so that the first movable part 2 and the first fixed electrode 51, 51 Between the second movable part 4 and the second fixed electrode 52 can be taken out separately.
- the movable sensor 1 is configured so that, when no force (acceleration) is applied from the outside, as shown in FIG.
- the surface of the surface is kept in the same plane.
- acceleration When acceleration is given to the movable sensor 1 from the outside, this acceleration acts on the support portions 17a, 17b, 21a, 21b, 31a, 31b and the support body that supports them. At this time, since the mass of the first movable part 2 is larger than the mass of the second movable part 4, the first movable part 2 tries to stay in the absolute space by the inertial force, and as a result, the support part 17a. , 17b, 21a, 21b, 31a, 31b, the first movable part moves relative to the direction opposite to the direction of acceleration.
- FIGS. 2 and 3 show the operation when downward acceleration is applied to the fixed portion 50 and the support portions 17a, 17b, 21a, 21b, 31a, 31b.
- the first movable part 2 moves upward relative to the fixed part 50 in order to stay with inertia
- the right connection link part 10a rotates around the fulcrum connection part 16a
- the left connecting link portion 10b rotates around the fulcrum connecting portion 16b.
- the second movable part 4 moves downward relative to the fixed part 50.
- the first movable part 2 and the second movable part 4 are supported on both sides by a right connection link part 10a and a left connection link part 10b, and the right connection link part 10a and the left connection link part 10b are connected to each other. Due to the point symmetry, the first movable part 2 and the second movable part 4 move in opposite directions while maintaining a parallel posture.
- the first movable part 2 and the second movable part 4 are connected by the right connection link part 10a and the left connection link part 10b, so that they can move in the opposite directions in parallel to each other. Since the support link portion 20a and the left outer support link portion 20b, the right inner support link portion 30a and the left inner support link portion 30b are provided, the first movable portion 2 and the second movable portion 4 are in a parallel posture. Can be moved stably.
- the detection output can be increased by obtaining the difference between the change in capacitance obtained by the first fixed electrode 51 and the change in capacitance obtained by the second fixed electrode 52. Further, by obtaining the difference in capacitance change, it is possible to cancel out the output fluctuation and noise caused by temperature characteristics and the like.
- the amount of movement of the first movable part 2 is proportional to the magnitude of acceleration, it is possible to detect acceleration by obtaining a detection output of the change in capacitance.
- FIG. 8 shows an example of a detection circuit 60 that obtains the difference in capacitance change.
- a variable capacitor composed of the first fixed electrode 51 and the first movable electrode provided on the surface 2a of the first movable part 2 is denoted by Ca
- the second fixed electrode A variable capacitor composed of the electrode 52 and the second movable electrode provided on the surface 4a of the second movable portion 4 is denoted by Cb.
- the pulse generator 61 generates a pulse signal whose voltage changes with a rectangular wave having a constant period, and this pulse signal is given to a delay path La1 composed of a resistor Ra and the variable capacitor Ca.
- the voltage whose rise is delayed in the delay path La1 and the voltage of the pulse signal that has passed through the bypass path La2 that has not passed through the delay path La1 are supplied to the AND circuit 62.
- the delay path La1 the rise time of the voltage changes due to the change in the capacitance of the variable capacitor Ca, and the AND circuit 62 outputs a voltage having a pulse width corresponding to the change in the rise time of the voltage.
- the rectangular wave output from the AND circuit 62 is smoothed by the smoothing circuit 63.
- a voltage that has passed through a delay path Lb1 composed of a resistor Rb and a variable capacitor Cb and a pulse signal that has passed through the bypass path Lb2 are applied to the AND circuit 64, and the AND circuit 64 receives the variable capacitor Cb.
- a voltage having a pulse width corresponding to the change in capacitance is output.
- the voltage is smoothed by the smoothing circuit 65.
- the fluctuation of the pulse width of the voltage applied from the AND circuit 62 to the smoothing circuit 63 and the fluctuation of the pulse width of the voltage applied from the AND circuit 64 to the smoothing circuit 65 are opposite to each other. Therefore, by obtaining the difference between both outputs in the differential circuit 66, it is possible to obtain a detection output to which absolute values are added, and to cancel fluctuations due to temperature changes and noise.
- the capacitances of the variable capacitor Ca and the variable capacitor Cb are equal in order to cancel fluctuations and noise due to temperature changes and the like.
- the areas of the first fixed electrode 51 and the second fixed electrode 52 are determined so that the capacitances of the variable capacitor Ca and the variable capacitor Cb are equal in the facing relationship with the movable electrode.
- FIGS. 6 and 7 are perspective views showing the movable sensor 101 according to the second embodiment of the present invention, FIG. 6 shows a state where no external force is acting, and FIG. 7 shows the first movable part. And the state which the 2nd movable part is moving in the reverse direction is shown.
- the third right support portion 31a and the third left support portion 31b of the movable sensor 1 shown in FIGS. 1 and 2 are omitted.
- the four support portions are fixed. It is used by being fixed to the part 50.
- the first right support portion 17a is provided with a fulcrum connection portion 16a that rotatably supports the right connection link portion 10a.
- the first left support portion 17b rotatably supports the left connection link portion 10b.
- a fulcrum connecting portion 16b is provided.
- the second right support portion 21a is provided with a fulcrum connection portion 22a that supports the right outer support link portion 20a, and the second left support portion 21b is a fulcrum connection portion 22b that supports the left outer support link portion 20b. Is provided.
- the fulcrum connection part 132a which supports the right inner side support link part 30a is provided in the 1st right side support part 17a
- the fulcrum connection part 132b which supports the left inner side support link part 30b is the 1st. 1 on the left side support portion 17b.
- the operation of the movable sensor 101 is the same as that of the movable sensor 1, but the support structure can be simplified because four support portions can be provided.
- FIG. 9 and 10 show a movable sensor 201 according to a third embodiment of the present invention.
- FIG. 9 is a plan view showing a state in which no external force is applied.
- FIG. 10 shows the first movable part and the first movable part. It is a perspective view which shows the moment when 2 movable parts are moving in the reverse direction.
- the first movable part 2 moves downward relative to the fixed part 50, and as a result, the second movable part 4 moves upward.
- the moment when the first movable part 2 and the first fixed electrodes 51 and 51 are separated and the second movable part 4 and the second fixed electrode 52 approach each other is shown.
- the same reference numerals are given to portions that perform the same functions as the movable sensor 1 of the first embodiment and the movable sensor 101 of the second embodiment, and the details thereof are described. Description is omitted.
- the first right support portion 17a and the first left support portion 17b are arranged apart from each other in the left-right direction (Y1-Y2 direction).
- the right side support part 231a and the second left side support part 231b are arranged at an interval in the left-right direction.
- the first right support part 17a rotatably supports the right connection link part 10a and the right outer support link part 20a, and the first left support part 17b rotates the left connection link part 10b and the left outer support link part 20b. Supports freely.
- the second right support part 231a rotatably supports the left inner support link part 30a, and the second left support part 231b rotatably supports the left inner support link part 30b.
- width dimension in the front-rear direction (X1-X2 direction) of the first right support part 17a and the first left support part 17b and the front-rear direction of the second right support part 231a and the second left support part 231b is the same.
- the first connecting arm 11a extends rearward (X direction), and the tip end portion and the first movable portion 2 are rotatably connected at the connecting portion 14a.
- the connecting portion 14a is provided with a torsion bar 19a shown in FIG.
- the torsion bar is similarly provided in the other connecting portions and fulcrum connecting portions described below.
- the second connecting arm 12a provided on the right connecting link portion 10a extends forward (X1 direction), and the tip end portion and the second movable portion 4 are rotatably connected at the connecting portion 15a. .
- middle connection part 13a of the right side connection link part 10a and the 1st right side support part 17a are rotatably supported via the fulcrum connection part 16a.
- the tip of the first connecting arm 11b extending forward (X1 direction) and the first movable portion 2 are rotatably connected at the connecting portion 14b, and rearward (X2 direction).
- the tip of the second connecting arm 12b extending in the direction and the second movable portion 4 are rotatably connected by a connecting portion 15b.
- the intermediate connecting portion 13b and the first left support portion 17b are rotatably supported at the fulcrum connecting portion 16b.
- the right outer support link portion 20a has a base portion rotatably supported by the first right support portion 17a at a fulcrum connecting portion 222a, and a front end facing the front (X1 direction) and the first movable portion 2 are connected to the connecting portion 23a.
- the left outer support link part 20b has a base part rotatably supported by the first left support part 17b by a fulcrum connection part 222b, and a front end facing the rear (X2 direction) and the first movable part 2 are connected parts.
- 23b is rotatably connected.
- the right connecting link portion 10a and the right outer support link portion 20a are connected via a deformable inter-link connecting portion 24a, and the left connecting link portion 10b and the left outer support link portion 20b can also be deformed. It is connected via the part 24b.
- a right inner support link portion 30a is rotatably connected to the second right support portion 231a via a fulcrum connection portion 32a, and a front end facing the rear side (X2 direction) of the right inner support link portion 30a and the second Two movable parts 4 are rotatably connected by a connecting part 33a.
- a left inner support link portion 30b is rotatably connected to the second left support portion 231b via a fulcrum connection portion 32b.
- a front end of the left inner support link portion 30b facing the front (X1 direction) and a second end are provided.
- Two movable parts 4 are rotatably connected by a connecting part 33b.
- the second connection arm 12a of the right connection link portion 10a and the left inner support link portion 30b are integrally connected by a beam portion 35a extending in the left-right direction, and the second connection arm of the left connection link portion 10b. 12b and the right inner side support link part 30b are integrally connected by the beam part 35b extended in the left-right direction.
- the movable sensor 201 shown in FIGS. 9 and 10 is directed to the fixed portion 50 to which the first right support portion 17a and the first left support portion 17b are fixed, that is, to the fixed substrate in the front-rear direction (X1-X2 direction). Even if warpage occurs, the fulcrum coupling part 16a and the fulcrum coupling part 222a and the fulcrum coupling part 16b and the fulcrum coupling part 222b are structured to be difficult to move up and down from their original positions.
- a fulcrum connecting portion 16a for supporting the right connecting link portion 10a and a fulcrum connecting portion 22a for supporting the right outer supporting link portion 20a are provided separately on the first right support part 17a and the second right support part 21a, which are located apart from each other in the front-rear direction. Therefore, when the fixing portion 50 is warped in the front-rear direction (X1-X2), the first right support portion 17a is tilted so that the X1 side is directed downward, and the second right support portion 21a is inclined on the X2 side. May tilt to face downward.
- the fulcrum connecting portion 16a and the fulcrum connecting portion 22a are lowered from their original positions, despite the neutral state in which no acceleration is applied.
- the first movable portion 2 moves downward from the original neutral posture
- the second movable portion 4 moves upward from the original neutral posture, although no acceleration is applied.
- a detection output proportional to the amount of movement of each of the movable parts 2 and 4 is generated as offset noise from the detection circuit 60 shown in FIG.
- the fulcrum connecting portion 16a and the fulcrum connecting portion 222a are provided on the same first right support portion 17a, and the fulcrum connecting portion 16b and the fulcrum connecting portion 222b are the same.
- the first left support portion 17b and the first left support portion 17b are located on the horizontal center line Ox. Therefore, even if the fixing portion 50 is warped, the fulcrum connecting portion 16a and the fulcrum connecting portion 222a, and the fulcrum connecting portion 16b and the fulcrum connecting portion 222b can be prevented from greatly moving up and down from their original positions. Therefore, offset noise in the neutral state as described above can be reduced.
- the fulcrum connection part 32a which supports the right inner side support link part 30a and the fulcrum connection part 32b which supports the left inner side support link part 30b are located away in the front-rear direction. Therefore, when a warp in the front-rear direction occurs in the fixed portion 50, the fulcrum connecting portion 32a and the fulcrum connecting portion 32b move either up or down from the original neutral position, even though no acceleration is applied. As a result, the second movable part 4 may move up and down from the original position.
- the fulcrum connecting part 32a that supports the right inner support link part 30a and the fulcrum connecting part 32b that supports the left inner support link part 30b are arranged in the horizontal center line. Not far away from Ox. Therefore, even if the fixed part 50 is warped, the fulcrum coupling part 32a and the fulcrum coupling part 32b are less likely to move up and down, and the second movable part 4 can be prevented from moving up and down from the original neutral posture. This can also reduce offset noise.
- FIG. 11 and 12 are perspective views showing a movable sensor 301 according to a fourth embodiment of the present invention.
- FIG. 11 shows a state in which no external force is acting.
- FIG. 12 shows the first movable part 2 and the first sensor. 2 shows a state in which the movable part 4 is moving in the opposite direction.
- the movable sensor 301 shown in FIGS. 11 and 12 is an improvement of the movable sensor 201 of the third embodiment shown in FIGS. 9 and 10, the difference between the movable sensor 301 and the movable sensor 201 will be described below. Mainly explained. Moreover, the part which demonstrates the same function as the movable sensor 201 among the movable sensors 301 shown in FIG. 11 and FIG.
- the movable sensor 301 shown in FIGS. 11 and 12 omits the second right support portion 231 a and the second left support portion 231 b of the movable sensor 201 shown in FIGS. 9 and 10 and is fixed to the fixing portion 50.
- the only supporting parts are the first right support part 17a and the first left support part 17b.
- the right connection link part 10a is rotatably supported by the first right support part 17a via a fulcrum connection part 16a, and the right outer support link part 20a is supported by the first right support part via a fulcrum connection part 222a.
- the part 17a is rotatably supported.
- the right connection link portion 10a and the right outer support link portion 20a are rotatably connected by an inter-link connection portion 24a.
- the left connecting link portion 10b is rotatably supported by the first left support portion 17b via a fulcrum connecting portion 16b, and the left outer support link portion 20b is supported by the first left supporting link portion 222b.
- the left side support portion 17b is rotatably supported.
- the left connecting link portion 10b and the left outer support link portion 20b are rotatably connected by an inter-link connecting portion 24b.
- the right inner support link portion 30a connected to the second movable portion 4 is rotatably connected to the right connection link portion 10a via the inner link connecting portion 332a.
- the left inner supporting link portion 30b connected to the left connecting link portion 10b is rotatably connected to the left connecting link portion 10b via the inner link connecting portion 332b.
- the right link connecting portion 24a and the inner link connecting portion 332a, and the left link connecting portion 24b and the inner link connecting portion 332b are all located on the same line on the horizontal center line Ox.
- the horizontal center line Ox is positioned at the midpoint between the link portions 23a, 14b on the front side (X1 side) and the link portions 23b, 14a on the rear side (X2 side) between the link portion and the first movable portion 2. is doing.
- the right connection link portion 10a and the left connection link portion 10b rotate with the fulcrum connection portions 16a and 16b as fulcrums
- the right inner support link portion 30a rotates with the inner inter-link connection portion 332a as a fulcrum.
- the left inner support link portion 30b rotates about the inner link connecting portion 332b as a fulcrum.
- the second movable part 4 operates in the opposite direction to the first movable part 2 while maintaining the parallel posture with the first movable part 2.
- the fixed part 50 is caused by thermal stress or the like. Even if warpage occurs, it is possible to suppress the occurrence of a shift in the position of the fulcrum portion of each link portion, and it becomes easier to further reduce the offset noise.
- the first fixed electrode 51 facing the first movable part 2 and the second fixed electrode 52 facing the second movable part are indicated by broken lines.
- the entire first fixed electrode 51 faces the first movable part 2, and the edge of the first fixed electrode 51 is arranged at a distance inside the edge of the first movable part 2. ing.
- the second fixed electrode 52 is entirely opposed to the second movable part 4, and the edge of the second fixed electrode 52 is arranged at a distance inside the edge of the second movable part 4. ing.
- the areas of the first fixed electrodes 51 and 51 and the area of the second fixed electrode 52 are set so that the capacitances of the variable capacitor Ca and the variable capacitor Cb shown in FIG. 8 are equal.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Pressure Sensors (AREA)
Abstract
【課題】 薄型且つ小型で、可動部の移動量を高精度に検出できる可動センサを提供する。 【解決手段】 第1の可動部2と第2の可動部4とが、連結リンク部10aと支持リンク部20aとで連結されており、第1の可動部2が固定部50に接近すると第2の可動部4が固定部50から離れるように動作する。固定部50には第1の固定電極51と第2の固定電極52が設けられ、第1の可動部2の表面2aには第1の固定電極51に対向する第1の可動電極が、第2の可動部4の表面4aには第2の固定電極52に対向する第2の可動電極が設けられている。第1の可動部2と第2の可動部4が逆向きに移動するため、第1の固定電極51と第1の可動電極との間の静電容量の変化と、第2の固定電極52と第2の可動電極との間の静電容量の変化の差を求めることで、第1の可動部2の移動状態を検出できる。
Description
本発明は、シリコン基板から切り出すなどして形成された可動部の移動量を、電極間の静電容量の変化に基づいて検知し、これにより、外部から作用する加速度などの物理量の測定を可能とした静電容量検出型の可動センサに関する。
以下の特許文献1ないし特許文献3に記載されたセンサは、シリコン基板をエッチング処理して、面方向または面と直交する方向に動作する可動部が形成されており、可動部に設けられた可動電極とこの可動電極に対向する固定電極との間の静電容量を検知して、可動部の移動量を測定できるようにしている。
この種のセンサは、可動部が微小であるため、電極間の静電容量の変化によって可動部の移動量を高精度に把握するために、電極の構造を工夫することが必要である。以下の各特許文献に記載されている従来のセンサは、可動部と固定部を細かな櫛歯形状にし、可動部の櫛歯と固定部の櫛歯を噛み合わせることで、可動部に設けられた可動電極と固定部に設けられた固定電極との対向面積をなるべく広くできるようにしている。しかし、可動部と固定部を共に櫛歯形状にして互い違いに噛み合わせる構造は複雑であり、加工コストが高くなる。
一方、可動部の表面と裏面の双方に可動電極を設けるとともに、表面側の可動電極に対向する固定電極と裏面側の可動電極に対向する固定電極を設けて、一方の可動電極と固定電極との間の静電容量の変化と、他方の可動電極と固定電極との間の静電容量の変化との差を求める方式が考えられる。この方式は、可動電極の両面に設けられた可動電極で得られる静電容量の変化の差を求めることで、検出感度を高くできるのみならず、正側で変化する静電容量の検知出力と負側で変化する静電容量の検知出力の差を求めることで、温度変化などの環境変化による変動成分やノイズ成分をキャンセルできるため、良質な検知出力を得ることができる利点がある。
しかし、上記構造では、可動部の表面と裏面の双方に可動電極を形成することが必要となって、可動部の構造そのものが複雑になる。また、表面側の可動電極に適正なギャップを介して対向する固定側電極と、裏面側の可動電極に適正なギャップを介して対向する固定側電極を配置することが必要になって、固定部側の構造が複雑になり、且つ可動部の表側と裏側の双方において、固定電極とのギャップを設定することが必要になって組み立て作業も煩雑になる。
本発明は、上記従来の課題を解決するものであり、可動部の一方の側の面に設けた複数の可動電極を使用して、互いに逆側に変化する静電容量の検知出力の差を求めることができ、簡単な構造でありながら、ノイズをキャンセルできしかも感度の良い出力を得ることが可能な静電容量検出型の可動センサを提供することを目的としている。
本発明は、可動部と固定部に互いに対向する電極が設けられ、前記可動部が前記固定部と接近しまたは離反する際の前記電極間の静電容量の変化を検出する可動センサにおいて、
第1の可動部および第2の可動部と、前記両可動部のそれぞれに回動自在に連結されたリンク部とを有し、前記リンク部は、前記第1の可動部との連結部と前記第2の可動部との連結部の間に支点が設定されて、前記リンク部が前記支点を中心に回動したときに、前記第1の可動部と前記第2の可動部の一方が固定部に接近し他方が前記固定部から離れるように動作可能であり、
前記第1の可動部に第1の可動電極が前記第2の可動部に第2の可動電極が、それぞれの可動部の同じ方向に向く面に設けられ、前記固定部には、前記第1の可動電極に対向する第1の固定電極と、前記第2の可動電極に対向する第2の固定電極とが設けられていることを特徴とするものである。
第1の可動部および第2の可動部と、前記両可動部のそれぞれに回動自在に連結されたリンク部とを有し、前記リンク部は、前記第1の可動部との連結部と前記第2の可動部との連結部の間に支点が設定されて、前記リンク部が前記支点を中心に回動したときに、前記第1の可動部と前記第2の可動部の一方が固定部に接近し他方が前記固定部から離れるように動作可能であり、
前記第1の可動部に第1の可動電極が前記第2の可動部に第2の可動電極が、それぞれの可動部の同じ方向に向く面に設けられ、前記固定部には、前記第1の可動電極に対向する第1の固定電極と、前記第2の可動電極に対向する第2の固定電極とが設けられていることを特徴とするものである。
本発明の可動センサは、第1の可動部と第2の可動部が、互いに逆向きに移動するように連結されているため、第1の可動部と固定部との間の静電容量の変化と第2の可動部と固定部との間の静電容量の変化とが逆の出力となる。この静電容量の変化の差を求めることにより、可動部の移動状態を高感度で且つ温度変化などに起因するノイズを相殺して検出することができる。しかも、第1の可動部と第2の可動部の同じ側の面に可動電極を設けているために、電極を形成しやすい。
なお、本発明において、第1の可動部の表面と裏面の双方に可動電極を設け、第2の可動部の表面と裏面の双方に可動電極を設け、固定部側に表裏それぞれの可動電極に対向する固定電極を設けてもよい。この場合、可動部の表裏に可動電極を設け、可動部の表面と裏面に対向するそれぞれの固定部に固定電極を設けることで構造がやや複雑になる。しかし、この場合には、全ての面の電極で検出される静電容量の同じ位相の変化を加算しさらに互いに逆の位相の変化の差を求めることで、さらに高感度で、且つノイズをキャンセルした検知出力を得ることが可能である。
本発明は、前記第1の可動電極と前記第1の固定電極との間の静電容量の変化と、前記第2の可動電極と前記第2の固定電極との間の静電容量の変化の差を求める検出回路を有するものである。
前記検出回路を設けることで、温度特性などに起因する変動成分やノイズなどをキャンセルして質の良い検知出力を得ることが可能になる。
例えば、本発明は、前記第1の可動部の質量と前記第2の可動部の質量のいずれか一方が他方よりも大きく、質量の大きい前記可動部が外部から与えられる加速度に反応して移動し、このとき質量の小さい前記可動部が質量の大きい前記可動部と逆向きに移動するものとして構成できる。
上記のように、質量の大きい一方の可動部が加速度で反応するように構成することで、加速度センサを構成できる。また、一方の可動部の質量が他方の可動部の質量よりも大きいと、重力の方向に対して可動センサの姿勢を変化させたときに、質量の大きい可動部の重力方向への移動し、このときの移動量を検知できるようになる。このようにして、可動センサを重力の向きに対する姿勢測定用として使用することもできる。
本発明は、前記第1の可動部と前記第2の可動部とが同じ厚みを有し、前記第1の可動部と前記第2の可動部の表面どうしと裏面どうしが同一面となったときに、前記リンク部、ならびに前記リンク部を回動自在に支持する支持部が、前記表面と前記裏面との厚みの範囲内に収まるものである。
例えば、本発明は、前記第1の可動部と前記第2の可動部と前記リンク部および前記支持部が、同じ板材から切り出されている。
また、本発明は、前記第1の可動部と前記リンク部との連結部、前記第2の可動部と前記リンク部との連結部、および前記リンク部と前記支持部との前記支点での連結部は、それぞれの部材間が前記板材の一部で形成したトーションバーを介して回動自在に連結されている。
上記トーションバーを使用すると、それぞれの連結部で部材間を回動自在に連結できるとともに、外力が作用しないときにトーションバーの弾性力によって、静止姿勢に復元できるようになる。
上記のように、第1の可動部と第2の可動部、リンク部、支持部をシリコン基板などの1枚の板材から切り出すことで、きわめて小型で薄型の可動センサを構成することができる。
なお、本発明は、前記第1の可動部と前記第2の可動部が導電性材料で形成され、前記第1の可動部自体が前記第1の可動電極として機能し、前記第2の可動部自体が前記第2の可動電極として機能するものとして構成できる。
また、本発明は、前記リンク部として、左右方向(Y)に間隔を空けて前後方向(X)に延びる右側連結リンク部と左側連結リンク部とが設けられ、前記右側連結リンク部は右側支点を介して第1の右側支持部に回動自在に支持され、前記左側連結リンク部は左側支点を介して第1の左側支持部に回動自在に支持されており、
前記右側連結リンク部と前記第1の可動部との連結部と、前記左側連結リンク部と前記第1の可動部との連結部の、いずれか一方が前方(X1)に位置し、他方が後方(X2)に位置し、
前記右側連結リンク部と前記第2の可動部との連結部が、前記右側支点を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、前記左側連結リンク部と前記第2の可動部との連結部が、前記左側支点を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記第1の右側支持部と前記第1の左側支持部が前記固定部に固定されているものとして構成できる。
前記右側連結リンク部と前記第1の可動部との連結部と、前記左側連結リンク部と前記第1の可動部との連結部の、いずれか一方が前方(X1)に位置し、他方が後方(X2)に位置し、
前記右側連結リンク部と前記第2の可動部との連結部が、前記右側支点を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、前記左側連結リンク部と前記第2の可動部との連結部が、前記左側支点を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記第1の右側支持部と前記第1の左側支持部が前記固定部に固定されているものとして構成できる。
上記のように、右側連結リンク部と左側連結リンク部を設けることにより、第1の可動部と第2の可動部を上下逆向きにほぼ水平姿勢を保ったまま動作させることができる。
さらに、本発明は、右外側支持リンク部が前記第1の右側支持部と前記第1の可動部とに回動自在に連結され、前記右外側支持リンク部と前記第1の可動部との連結部が、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、
左外側支持リンク部が前記第1の左側支持部と前記第1の可動部とに回動自在に連結され、前記左外側支持リンク部と前記第1の可動部との連結部が、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置していることが好ましい。
左外側支持リンク部が前記第1の左側支持部と前記第1の可動部とに回動自在に連結され、前記左外側支持リンク部と前記第1の可動部との連結部が、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置していることが好ましい。
さらに本発明は、第2の右側支持部と第2の左側支持部とが設けられ、
右内側支持リンク部が前記第2の右側支持部と前記第2の可動部とに回動自在に連結され、前記右内側支持リンク部と前記第2の可動部との連結部が、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
左内側支持リンク部が前記第2の左側支持部と前記第2の可動部とに回動自在に連結され、前記左内側支持リンク部と前記第2の可動部との連結部が、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置していることが好ましい。
右内側支持リンク部が前記第2の右側支持部と前記第2の可動部とに回動自在に連結され、前記右内側支持リンク部と前記第2の可動部との連結部が、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
左内側支持リンク部が前記第2の左側支持部と前記第2の可動部とに回動自在に連結され、前記左内側支持リンク部と前記第2の可動部との連結部が、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置していることが好ましい。
上記のように、右側連結リンク部と左側連結リンク部の他に、右外側支持リンク部と左外側支持リンク部、および右内側支持リンク部と左内側支持リンク部を設けることで、第1の可動部と第2の可動部を、安定した水平姿勢で上下に動作させることが可能になる。
本発明は、前記第1の右側支持部と前記第1の左側支持部とが、左右方向(Y)に延びる同一線上に配置されていることが好ましい。
さらに、本発明は、前記第1の右側支持部と前記第1の左側支持部、および前記第2の右側支持部と前記第2の左側支持部とが、左右方向(Y)に延びる同一線上に配置されていることが好ましい。
上記のように、前記第1の右側支持部と前記第1の左側支持部を左右方向の同一線上に配置し、さらには前記第1の右側支持部と前記第1の左側支持部、および前記第2の右側支持部と前記第2の左側支持部とを左右方向の同一線上に配置することで、固定部に熱による歪みや外力による歪みが生じたときであっても、第1の可動部と第2の可動部が適正な中立位置を保ちやすくなる。
また、本発明は、右外側支持リンク部がリンク間連結部を介して前記右側連結リンク部に回動自在に連結され、左外側支持リンク部がリンク間連結部を介して前記左側連結リンク部に回動自在に連結され、
前記右外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、
前記左外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記右外側支持リンク部と前記第1の可動部との連結部と、前記左外側支持リンク部と前記第1の可動部との連結部が、前後逆側に位置しているものとして構成できる。
前記右外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、
前記左外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記右外側支持リンク部と前記第1の可動部との連結部と、前記左外側支持リンク部と前記第1の可動部との連結部が、前後逆側に位置しているものとして構成できる。
また、本発明は、右内側支持リンク部が内側リンク間連結部を介して前記右側連結リンク部に回動自在に連結され、左内側支持リンク部が内側リンク間連結部を介して前記左側連結リンク部に回動自在に連結され、
前記右内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
前記左内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置しており、
前記右内側支持リンク部と前記第2の可動部との連結部と、前記左内側支持リンク部と前記第2の可動部との連結部が、前後逆側に位置しているものが好ましい。
前記右内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
前記左内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置しており、
前記右内側支持リンク部と前記第2の可動部との連結部と、前記左内側支持リンク部と前記第2の可動部との連結部が、前後逆側に位置しているものが好ましい。
上記のように、右内側支持リンク部と右側連結リンク部とを回動自在に連結し、左内側支持リンク部と左側連結リンク部とを回動自在に連結することで、第2の右側支持部と第2の左側支持部とを設ける必要がなくなる。支持部の数を少なくすることで、固定部に熱による歪みや外力による歪が生じても、支持部の間での高さ位置の相違や傾きの相違などが生じるのを防止でき、第1の可動部と第2の可動部の動作姿勢を安定させやすくなる。
この場合に、前記リンク間連結部と前記内側リンク間連結部とが、左右方向(Y)に延びる同一線上に配置されていることが好ましい。
リンク間連結部と内側リンク間連結部とを同一線上に配置することで、リンク部がバランスよく動作するようになる。
本発明の可動センサは、第1の可動部と第2の可動部が逆向きに動くため、第1の可動部と第2の可動部の同じ方向に向く面に設けた可動電極から、静電容量の変化を逆の位相で取り出すことができる。よって、その差を求めることで、高感度で、しかも温度変化などによるノイズなどの変動成分を相殺した検知出力を得ることが可能である。
また、本発明の可動センサは、きわめて小型で薄型に構成できる。
また、本発明の可動センサは、きわめて小型で薄型に構成できる。
各図に示す可動センサに関しては、Y方向が左右方向であり、Y1方向が右方向でY2方向が左方向、X方向が前後方向であり、X1方向が前方でX2方向が後方である。また、Y方向とX方向の双方に直交する方向が上下方向である。
図1に示す可動センサ1は、長方形の平板であるシリコン基板から形成されている。すなわち、シリコン基板に、各部材の形状に対応する平面形状のレジスト層を形成し、レジスト層が存在していない部分で、シリコン基板をディープRIE(ディープ・リアクティブ・イオン・エッチング)などのエッチング工程で切断することで、各部材を分離している。したがって、可動センサ1を構成する各部材は、シリコン基板の表面と裏面の厚みの範囲内で構成されている。図1に示すように、可動センサが静止状態のときに、第1の可動部と第2の可動部は、その表面どうしと裏面どうしが同一面上に位置しており、それ以外の部材は、前記表面および裏面から突出していない。
可動センサ1は微小であり、例えば長方形の長辺1a,1bの長さ寸法は1mm以下であり、短辺1c,1dの長さ寸法は0.8mm以下である。さらに、厚み寸法は0.1mm以下である。
図1と図2に示すように、可動センサ1は、長方形の長辺1a,1bおよび短辺1c,1dで囲まれた外枠部分が第1の可動部2である。長辺1a,1bの延びる方向が前後方向であり、短辺1c,1dの延びる方向が左右方向である。第1の可動部2の中央部には長方形の中央穴3が上下に貫通して形成されており、この中央穴3の内部に第2の可動部4が形成されている。第2の可動部4はほぼ長方形であり、第1の可動部2と第2の可動部4は互いに独立している。
図1に示す中立状態(静止状態)では、第1の可動部2の表面2aと第2の可動部4の表面4aが同一面であり、第1の可動部2の裏面2bと第2の可動部4の裏面4b(図3参照)が同一面である。第1の可動部2の表面2aの面積は第2の可動部4の表面4aの面積よりも広く、第1の可動部2の質量が第2の可動部4の質量よりも大きい。例えば、第1の可動部2の質量は第2の可動部4の質量の2倍以上である。
長方形の右側(Y1側)の長辺1aの内側には長辺1aに沿って延びる長穴5aが形成され、左側(Y2側)の長辺1bの内側には長辺1bに沿って延びる長穴5bが形成されている。また、右側の長穴5aの内側には、第2の可動部の中央穴3の長辺と第2の可動部4の長辺との間の細長い隙間6aが、前記長穴5aと平行に形成されている。左側の長穴5bの内側には、中央穴3の長辺と第2の可動部4の長辺との間の細長い隙間6bが、前記長穴5bと平行に形成されている。
図1に示すように、右側の長辺1aの内側には右側連結リンク部10aが設けられている。右側連結リンク部10aの平面形状はクランク状であり、前方(X1方向)に延びる第1の連結腕11aと後方(X2方向)に延びる第2の連結腕12aおよび中間連結部13aとが一体に形成されている。第1の連結腕11aは、長辺1aの内側に延びる前記長穴5aの内部で、シリコン基板から切り出されて形成されており、第2の連結腕12aは、長穴5aの内側に延びる前記隙間6aの内部でシリコン基板から切り出されて形成されている。第1の連結腕11aと第2の連結腕12aは、これらと直交する向きの中間連結部13aによって一体に連結されている。
右側連結リンク部10aの第1の連結腕11aの前方(X1方向)の先端部と第1の可動部2とが、連結部14aにおいて回動自在に連結されており、右側連結リンク部10aの第2の連結腕12aの後方(X2方向)の先端部と第2の可動部4とが、連結部15aにおいて回動自在に連結されている。右側連結リンク部10aの第1の連結腕11aと中間連結部13aとに隣接する部分には、第1の右側支持部17aが独立して切り出されており、右側連結リンク部10aの第1の連結腕11aと第1の右側支持部17aとが、支点連結部16aにおいて回動自在に連結されている。
左側の長辺1bの内側には左側連結リンク部10bが設けられている。左側連結リンク部10bは、前記右側連結リンク部10aと点対称であり、後方(X2方向)に延びる第1の連結腕11bと前方(X1方向)に延びる第2の連結腕12bおよび中間連結部13bとが一体に形成されている。第1の連結腕11bは、長辺1bの内側に延びる前記長穴5bの内部に位置し、第2の連結腕12bは、長穴5bの内側に延びる前記隙間6bの内部に位置している。第1の連結腕11bと第2の連結腕12bは、これらと直交する向きの中間連結部13bによって一体に連結されている。
図1に示すように、左側連結リンク部10bの第1の連結腕11bの後方(X2)方向の先端部と第1の可動部2は、連結部14bにおいて回動自在に連結されており、左側連結リンク部10bの第2の連結腕12bの前方(X1方向)の先端部と第2の可動部4とが、連結部15bにおいて回動自在に連結されている。左側連結リンク部10bの第1の連結腕11bと中間連結部13bとに隣接する部分には、第1の左側支持部17bが独立して切り出されており、左側連結リンク部10bの第1の連結腕11bと第1の左側支持部17bとが、支点連結部16bにおいて回動自在に連結されている。
図4に示すように、前記連結部14aでは、第1の可動部2に溝18aが形成されており、この溝18aの内部において、右側連結リンク部10aの第1の連結腕11aと、第1の可動部2とを繋ぐトーションバー19aが設けられている。このトーションバー19aは、第1の可動部2および右側連結リンク部10aと同様にシリコンで形成されている。すなわち、長方形のシリコン基板をエッチングして、第1の可動部2や右側連結リンク部10aを分離する際に、第1の可動部2と第1の連結腕11aとを連結するようにシリコン基板の一部を残しシリコンを円柱状や角柱状に加工して、トーションバー19aが形成されている。
図5に示すように、前記支点連結部16aでは、第1の可動部2と第1の右側支持部17aとの間に、溝18bが形成されており、この溝18b内において、右側連結リンク部10aと第1の右側支持部17aとが、シリコンで形成されたトーションバー19bで連結されている。
図4に示す連結部14aでは、トーションバー19aが捻り変形することで、第1の連結腕11aと第1の可動部2とが相対的に回動する。同様に、図5に示す支点連結部16aにおいても、トーションバー19bが捻り変形することで、右側連結リンク部10aと第1の右側支持部17aとが相対的に回動する。また、トーションバー19a,19bを形成しているシリコンが弾性材料であるため、第1の可動部2などに外力が作用していないときは、図1および図4に示すように、トーションバー19a,19bの弾性復元力により、第1の可動部2の表面2aと第1の連結腕11aの表面とが同一面となるように復元する。
なお、右側連結リンク部10aの第2の連結腕12aと第2の可動部4とを連結する連結部15aにおいても、同様にトーションバーが一体に形成されている。さらに、左側連結リンク部10bと、第1の可動部2ならびに第2の可動部4を連結している連結部14b,15bおよび支点連結部16bにも同様にしてトーションバーが一体に形成されており、弾性復元力を有する回動部が形成されている。
右側の長辺1aの内側に形成された前記長穴5a内では、前記右側連結リンク部10aの第1の連結腕11aが存在しない部分に、右外側支持リンク部20aが切り出されて設けられている。右外側支持リンク部20aと右側連結リンク部10aの第2の連結腕12aとの間には、第2の右側支持部21aが切り出されて設けられている。そして、右外側支持リンク部20aの前方(X1方向)に向いている基部と第2の右側支持部21aとが支点連結部22aによって回動自在に連結されている。
図5に示すように、前記支点連結部22aでは、第2の右側支持部21aと第1の可動部2との間に溝18cが形成されており、この溝18c内に、右外側支持リンク部20aと第2の右側支持部21aとを連結するトーションバー19cがシリコンで一体に形成されている。支点連結部22aでは、トーションバー19cの弾性力により弾性復元力を発揮する回動支持部が形成されている。図1に示すように、右外側支持リンク部20aの後方(X2方向)に向く先端部と第1の可動部2とが連結部23aで連結されている。この連結部23aにおいても、右外側支持リンク部20aと第2の可動部4とがトーションバーで連結されている。
図1および図5に示すように、右外側支持リンク部20aと前記右側連結リンク部10aの中間連結部13aとがリンク間連結部24aによって連結されている。図5に示すように、リンク間連結部24aには溝18dが形成されており、溝18d内に、右外側支持リンク部20aと前記右側連結リンク部10aの中間連結部13aとを連結するトーションバー19dが一体に形成されている。
右側連結リンク部10aは、支点連結部16aのトーションバー19bを支点として回動し、右外側支持リンク部20aは支点連結部22aのトーションバー19cを支点として回動するが、リンク間連結部24aのトーションバー19dは、2つのトーションバー19bとトーションバー19cの距離のちょうど中点に位置している。図2に示すように、右側連結リンク部10aと右外側支持リンク部20aとが回動したときに、リンク間連結部24aのトーションバー19dは、それぞれを水平姿勢に戻す弾性復元力を与えるように機能する。
図1に示すように、左側の長辺1bの内側の長穴5b内では、前記左側連結リンク部10bの第1の連結腕11bが存在していない部分に、左外側支持リンク部20bが切り出されて設けられている。左外側支持リンク部20bの形状およびその支持構造は、前記右外側支持リンク部20aと点対称である。左外側支持リンク部20bの後方(X2方向)に向く基部と第2の左側支持部21bとが支点連結部22bで連結されており、左外側支持リンク部20bの前方(X1方向)に向く先端部と第2の可動部4とが連結部23bによって回動自在に連結されている。さらに、左側連結リンク部10bの中間連結部13bと左外側支持リンク部20bとがリンク間連結部24bで連結されている。前記支点連結部22b、連結部23bおよびリンク間連結部24bのそれぞれには、図5と同様にトーションバーが一体に形成されている。
図1と図5に示すように、右側の隙間6a内では、前記右側連結リンク部10aの第2の連結腕12aが存在していない部分に、右内側支持リンク部30aが切り出されて設けられている。右内側支持リンク部30aの内側には、第2の可動部4の一部を切り出して形成された第3の右側支持部31aが設けられている。右内側支持リンク部30aと第3の右側支持部31aとが支点連結部32aで回動自在に連結されている。図5に示すように、支点連結部32aには溝18eが形成されており、溝18e内に、右内側支持リンク部30aと第3の右側支持部31aとを連結するトーションバー19eが一体に形成されている。
支点連結部32aに設けられたトーションバー19eは、前記右外側支持リンク部20aと第2の右側支持部21aとを連結しているトーションバー19cと同軸上に位置している。
図1に示すように、右内側支持リンク部30aの前方(X1方向)に向く先端部と第2の可動部4とが連結部33aで回動自在に連結されている。この連結部33aにもトーションバーが設けられている。
左側の隙間6b内では、左側連結リンク部10bの第2の連結腕12bが存在していない部分に左内側支持リンク部30bが切り出されて設けられている。左内側支持リンク部30bの形状および支持構造は、前記右内側支持リンク部30aと点対称である。
左内側支持リンク部30bの内側には第2の可動部4の一部を切り出して形成された第3の左側支持部31bが設けられており、左内側支持リンク部30bと第3の左側支持部31bとが支点連結部32bで回動自在に連結されている。また、左内側支持リンク部30bの後方(X2方向)に向く先端部と第2の可動部4とが連結部33bで連結されている。これら支点連結部32bと連結部33bにおいても、トーションバーが一体に形成されている。
図3に示すように、可動センサ1には、第1の可動部2の表面2aと第2の可動部4の表面4aに対向する固定部50が設けられている。固定部50の下面50aには、図示しない支持体が一体に突出形成されており、この支持体によって、第1の右側支持部17a、第1の左側支持部17b、第2の右側支持部21a、第2の左側支持部21b、第3の右側支持部31aおよび第3の左側支持部31bが固定されて支持されている。この際、それぞれの支持部17a、17b,21a,21b,31a,31bは、その表面が同一面に位置するように支持固定される。
なお、前記固定部50とは別個に第1の可動部2の裏面2bと第2の可動部4の裏面4bに対向する固定部が設けられ、この固定部から一体に延びる支持体によって、それぞれの支持部17a,17b,21a,21b,31a,31bの裏面が固定支持されてもよい。
また、前記固定部50の内部では、支持部17a,17b,21a,21b,31a,31bが動かないように固定されている状態で、図2と図3に示すように、第1の可動部2と第2の可動部4が上下に動くことのできる移動空間が形成されている。
図3に示すように、固定部50の下面には第1の固定電極51,51と第2の固定電極52とが設けられている。固定部50はシリコン基板などであり、各固定電極51,51,52は、固定部50の下面50aに絶縁層を介して導電性金属材料をスパッタしまたはメッキすることで形成されている。第1の可動部2の表面2aには、前記第1の固定電極51,51に対面する第1の可動電極が絶縁層を介してスパッタやメッキ工程で形成されている。また、第2の可動部4の表面4aには、第2の固定電極52に対面する第2の可動電極が絶縁層を介してスパッタやメッキで形成されている。
このとき、第1の可動部2に設けられた第1の可動電極と、第2の可動部4に設けられる第2の可動電極は互いに導通されていない独立した電極となる。一方、固定部50に設けられている第1の固定電極51,51と第2の固定電極52は、互いに独立した電極であってもよいし、または、第1の固定電極51,51と第2の固定電極52とが互いに一体に形成されたあるいは互いに導通された共通固定電極であってもよい。
また、第1の可動部2と第2の可動部4が、シリコン基板などの導電性材料で形成されている場合には、第1の可動部2それ自体を第1の可動電極として使用し、第2の可動部4それ自体を第2の可動部として使用することができる。この場合、第1の可動部2と第2の可動部4は同じ基板から一体に形成されているため、第1の可動電極と第2の可動電極は互いに導通する共通可動電極となる。この場合、第1の固定電極51,51と第2の固定電極52とを互いに導通していない独立した電極とすることで、第1の可動部2と第1の固定電極51,51との間の静電容量、および第2の可動部4と第2の固定電極52との間の静電容量の変化を別々に取り出すことができる。
この可動センサ1は、外部から力(加速度)が作用していないときに、それぞれの支点連結部および連結部に設けられたトーションバーの弾性復元力により、図1に示すように、全ての部分の表面が同一平面となった状態を維持している。
可動センサ1に外部から加速度が与えられると、この加速度は、支持部17a,17b,21a,21b,31a,31bおよびこれを支持する支持体に作用する。このとき、第1の可動部2の質量が第2の可動部4の質量よりも大きいため、第1の可動部2が慣性力によって絶対空間内で留まろうとし、その結果、支持部17a,17b,21a,21b,31a,31bに対して第1の可動部が加速度の作用方向と逆の方向へ相対的に移動する。
図2と図3は、固定部50および支持部17a,17b,21a,21b,31a,31bに対して下向きの加速度が作用したときの動作を示している。このとき、第1の可動部2が慣性力で留まろうとするために固定部50に対して相対的に上方へ移動し、右側連結リンク部10aが支点連結部16aを中心に回動し、左側連結リンク部10bが支点連結部16bを中心として回動する。その結果、第2の可動部4が固定部50に対して相対的に下方へ移動する。第1の可動部2と第2の可動部4が、その両側において右側連結リンク部10aと左側連結リンク部10bとで支持されており、しかも右側連結リンク部10aと左側連結リンク部10bとが点対称であるため、第1の可動部2と第2の可動部4は、互いに平行な姿勢を維持したまま逆向きに移動する。
第1の可動部2と第2の可動部4は、右側連結リンク部10aと左側連結リンク部10bとで連結されていることによって、互いに平行な姿勢で逆方向へ移動できるが、さらに右外側支持リンク部20aと左外側支持リンク部20b、右内側支持リンク部30aと左内側支持リンク部30bが設けられているため、第1の可動部2と第2の可動部4は、平行な姿勢を安定して維持して移動することができる。
図3に示すように、固定部50内において、第1の可動部2が上昇すると、第1の固定電極51と第1の可動部2の表面2aに設けられた第1の可動電極との距離が短くなるために電極間の静電容量が大きくなる。一方、第2の可動部4が下降するため、第2の固定電極52と第2の可動部4の表面に設けられた第2の可動電極との距離が長くなり、電極間の静電容量が低下する。そのため、第1の固定電極51で得られる静電容量の変化と第2の固定電極52で得られる静電容量の変化の差を求めることで、検知出力を高めることができる。また静電容量の変化の差を求めることで、温度特性などに起因する出力の変動分やノイズを相殺できる。
前記第1の可動部2の移動量は加速度の大きさに比例するため、前記静電容量の変化の検知出力を得ることで、加速度を検出することが可能である。
図8は、前記静電容量の変化の差を求める検出回路60の一例を示している。
図8の検出回路60では、第1の固定電極51と、第1の可動部2の表面2aに設けられた第1の可動電極とで構成される可変コンデンサーをCaで示し、第2の固定電極52と、第2の可動部4の表面4aに設けられた第2の可動電極とで構成される可変コンデンサーをCbで示している。
図8の検出回路60では、第1の固定電極51と、第1の可動部2の表面2aに設けられた第1の可動電極とで構成される可変コンデンサーをCaで示し、第2の固定電極52と、第2の可動部4の表面4aに設けられた第2の可動電極とで構成される可変コンデンサーをCbで示している。
パルス発生部61からは一定の周期の矩形波で電圧が変化するパルス信号が発生し、このパルス信号が抵抗器Raと前記可変コンデンサーCaとで構成される遅延経路La1に与えられる。遅延経路La1で立ち上がりが遅延した電圧と、遅延経路La1を経ていないバイパス経路La2を通過したパルス信号の電圧とがアンド回路62に与えられる。遅延経路La1では、可変コンデンサーCaの静電容量の変化により電圧の立ち上がり時刻が変化し、アンド回路62では、前記電圧の立ち上がり時刻の変化に対応したパルス幅の電圧が出力される。そしてアンド回路62から出力される矩形波が平滑回路63で平滑化される。
同様に、抵抗器Rbと可変コンデンサーCbとで構成される遅延経路Lb1を経た電圧と、バイパス経路Lb2を通過したパルス信号とがアンド回路64に与えられ、アンド回路64からは、可変コンデンサーCbの静電容量の変化に対応したパルス幅の電圧が出力される。そしてその電圧が平滑回路65で平滑化される。
アンド回路62から平滑回路63に与えられる電圧のパルス幅の変動と、アンド回路64から平滑回路65に与えられる電圧のパルス幅の変動は、互いに逆である。そこで、差動回路66において両出力の差を求めることで、絶対値を加算された検知出力を得ることができ、温度変化などによる変動分やノイズをキャンセルできる。
上記回路では、温度変化などによる変動分やノイズをキャンセルするために、可変コンデンサーCaと可変コンデンサーCbとの容量が等しいことが好ましい。第1の固定電極51,51と第2の固定電極52は、可動電極との対向関係において、可変コンデンサーCaと可変コンデンサーCbとの容量が等しくなるように、その面積が決められている。
次に、図6と図7は本発明の第2の実施の形態の可動センサ101を示す斜視図であり、図6は外力が作用していない状態を示し、図7は第1の可動部と第2の可動部が逆向きに移動している状態を示している。
図6と図7に示す可動センサ101において、第1の実施の形態の可動センサ1と同じ機能を発揮する部分には、同じ符号を付して詳しい説明を省略する。
図6と図7に示す可動センサ101は、図1と図2に示す可動センサ1の第3の右側支持部31aと第3の左側支持部31bが省略されており、可動センサ101は、第1の右側支持部17a、第1の左側支持部17b、第2の右側支持部21aおよび第2の左側支持部21bの4個の支持部を有しており、この4個の支持部が固定部50に固定されて使用される。
第1の右側支持部17aには、右側連結リンク部10aを回動自在に支持する支点連結部16aが設けられ、第1の左側支持部17bには左側連結リンク部10bを回動自在に支持する支点連結部16bが設けられている。第2の右側支持部21aには、右外側支持リンク部20aを支持する支点連結部22aが設けられ、第2の左側支持部21bには、左外側支持リンク部20bを支持する支点連結部22bが設けられている。
そして、この可動センサ101では、右内側支持リンク部30aを支持する支点連結部132aが、第1の右側支持部17aに設けられ、左内側支持リンク部30bを支持する支点連結部132bが、第1の左側支持部17bに設けられている。
この可動センサ101の動作は、前記可動センサ1と同じであるが、支持部を4個にできるため、支持構造を単純にできる。
図9と図10は本発明の第3の実施の形態の可動センサ201を示しており、図9は外力が作用していない状態を示す平面図で、図10は第1の可動部と第2の可動部が逆向きに移動している瞬間を示す斜視図である。図10では、図2および図7とは逆に、第1の可動部2が固定部50に対して相対的に下方へ移動し、その結果、第2の可動部4が上方へ向けて移動しており、第1の可動部2と第1の固定電極51,51とが離れ、第2の可動部4と第2の固定電極52とが接近した瞬間を示している。
図9と図10に示す可動センサ201に関しては、第1の実施の形態の可動センサ1および第2の実施の形態の可動センサ101と同じ機能を発揮する部分に同じ符号を付してその詳しい説明を省略する。
図9と図10に示す可動センサ201は、第1の右側支持部17aと第1の左側支持部17bとが左右方向(Y1-Y2方向)に離れて配置されており、その内側に第2の右側支持部231aと第2の左側支持部231bとが左右方向に間隔を空けて配置されている。第1の右側支持部17aは右側連結リンク部10aと右外側支持リンク部20aを回動自在に支持し、第1の左側支持部17bは左側連結リンク部10bと左外側支持リンク部20bを回動自在に支持している。第2の右側支持部231aは、左内側支持リンク部30aを回動し自在に支持し、第2の左側支持部231bは、左内側支持リンク部30bを回動自在に支持している。
図9に示すように、可動センサ201の短辺1cと短辺1dとの中点において左右方向(Y1-Y2方向)に延びる線を横中心線Oxとしたときに、第1の右側支持部17aと第1の左側支持部17bのそれぞれを前後方向に二分する中点が、前記横中心線Ox上に位置し、第2の右側支持部231aと第2の左側支持部231bのそれぞれを前後方向に二分する中点が、前記横中心線Ox上に位置している。また、第1の右側支持部17aおよび第1の左側支持部17bの前後方向(X1-X2方向)の幅寸法と、第2の右側支持部231aおよび第2の左側支持部231bの前後方向(X1-X2方向)の幅寸法は同一である。
右側連結リンク部10aは、第1の連結腕11aが後方(X方向)に延びて、その先端部と第1の可動部2とが連結部14aにおいて回動自在に連結されている。この連結部14aには、図4に示すトーションバー19aが設けられている。以下に説明する他の連結部および支点連結部においても同様にトーションバーが設けられている。右側連結リンク部10aに設けられた第2の連結腕12aは前方(X1方向)に延びており、その先端部と第2の可動部4とが連結部15aにおいて回動自在に連結されている。また右側連結リンク部10aの中間連結部13aと第1の右側支持部17aとが支点連結部16aを介して回動自在に支持されている。
同様に、左側連結リンク部10bは、前方(X1方向)に延びる第1の連結腕11bの先端と第1の可動部2とが連結部14bにおいて回動自在に連結され、後方(X2方向)に延びる第2の連結腕12bの先端と第2の可動部4とが連結部15bで回動自在に連結されている。また、中間連結部13bと第1の左側支持部17bとが支点連結部16bにおいて回動自在に支持されている。
右外側支持リンク部20aは、基部が第1の右側支持部17aに支点連結部222aにおいて回動自在に支持され、前方(X1方向)に向く先端と第1の可動部2とが連結部23aにおいて回動自在に連結されている。左外側支持リンク部20bは、その基部が支点連結部222bによって第1の左側支持部17bに回動自在に支持され、後方(X2方向)に向く先端と第1の可動部2とが連結部23bにおいて回動自在に連結されている。
また、右側連結リンク部10aと右外側支持リンク部20aが変形可能なリンク間連結部24aを介して連結されており、左側連結リンク部10bと左外側支持リンク部20bも変形可能なリンク間連結部24bを介して連結されている。
第2の右側支持部231aには、支点連結部32aを介して右内側支持リンク部30aが回動自在に連結されており、右内側支持リンク部30aの後方(X2方向)に向く先端と第2の可動部4とが連結部33aで回動自在に連結されている。第2の左側支持部231bには、支点連結部32bを介して左内側支持リンク部30bが回動自在に連結されており、左内側支持リンク部30bの前方(X1方向)に向く先端と第2の可動部4とが連結部33bで回動自在に連結されている。
なお、右側連結リンク部10aの第2の連結腕12aと左内側支持リンク部30bとが、左右方向に延びる梁部35aによって一体に連結されており、左側連結リンク部10bの第2の連結腕12bと右内側支持リンク部30bとが、左右方向に延びる梁部35bによって一体に連結されている。
図9と図10に示す可動センサ201は、第1の右側支持部17aと第1の左側支持部17bが固定されている固定部50、すなわち固定基板に前後方向(X1-X2方向)に向かって反りが発生しても、支点連結部16aと支点連結部222aおよび支点連結部16bと支点連結部222bが、本来の位置から上下に動きにくい構造である。
これと比較するために図6に示す可動センサ101を参照すると、この可動センサ101では、右側連結リンク部10aを支持する支点連結部16aと、右外側支持リンク部20aを支持する支点連結部22aとが、互いに独立して前後方向に離れて位置する第1の右側支持部17aと第2の右側支持部21aとに別々に設けられている。そのため、固定部50に前後方向(X1-X2)に向けて反りが発生したときに、第1の右側支持部17aがX1側が下向きとなるように傾き、第2の右側支持部21aがX2側が下向きとなるように傾くことがある。このとき、加速度が作用していない中立状態であるにもかかわらず、支点連結部16aと支点連結部22aが本来の位置よりも下がってしまう。その結果、第1の可動部2が本来の中立姿勢よりも下側へ移動し、第2の可動部4が本来の中立姿勢よりも上側へ移動して、加速度が作用していないにもかかわらず、図8に示す検出回路60から各可動部2,4の移動量に比例した検知出力がオフセットノイズとして発生することになる。
一方、図9と図10に示す可動センサ201は、支点連結部16aと支点連結部222aとが同じ第1の右側支持部17aに設けられ、支点連結部16bと支点連結部222bとが同じ第1の左側支持部17bに設けられ、しかも第1の右側支持部17aと第1の左側支持部17bが横中心線Ox上に位置している。そのために、固定部50に反りが発生しても、支点連結部16aと支点連結部222a、および支点連結部16bと支点連結部222bが本来の位置から上下に大きく動くのを抑えることができる。そのため、前記のような中立状態でのオフセットノイズを低減できる。
次に、図1に示した可動センサ1では、右内側支持リンク部30aを支持する支点連結部32aと、左内側支持リンク部30bを支持する支点連結部32bが前後方向に離れて位置しているために、固定部50に前後方向の反りが発生すると、加速度が作用していないにもかかわらず、支点連結部32aと支点連結部32bとが本来の中立位置よりも上下いずれかに動いてしまい、その結果、第2の可動部4が本来の位置よりも上下に移動してしまうことがある。
これに対し、図9と図10に示す可動センサ201は、右内側支持リンク部30aを支持する支点連結部32aと、左内側支持リンク部30bを支持する支点連結部32bとが、横中心線Oxから前後に大きく離れていない。よって、固定部50に反りが生じても支点連結部32aと支点連結部32bが上下に動きにくくなり、第2の可動部4が本来の中立姿勢よりも上下に動くことを抑制できる。これによっても、オフセットノイズを低減できる。
図11と図12は本発明の第4の実施の形態の可動センサ301を示す斜視図であり、図11は外力が作用していない状態を示し、図12は第1の可動部2と第2の可動部4が逆向きに移動している状態を示している。
図11と図12に示す可動センサ301は、図9と図10に示す第3の実施の形態の可動センサ201を改良したものであるため、以下では可動センサ301と可動センサ201の相違部分を主として説明する。また、図11と図12に示す可動センサ301のうちの可動センサ201と同じ機能を発揮する部分には、同じ符号を付して詳しい説明を省略する。
図11と図12に示す可動センサ301は、図9と図10に示す可動センサ201の第2の右側支持部231aと第2の左側支持部231bを省略しており、固定部50に固定される支持部は、第1の右側支持部17aと第1の左側支持部17bのみとなっている。
右側連結リンク部10aは、支点連結部16aを介して第1の右側支持部17aに回動自在に支持され、右外側支持リンク部20aは、支点連結部222aを介して前記第1の右側支持部17aに回動自在に支持されている。また、右側連結リンク部10aと右外側支持リンク部20aはリンク間連結部24aによって回動自在に連結されている。同様に、左側連結リンク部10bは、支点連結部16bを介して第1の左側支持部17bに回動自在に支持され、左外側支持リンク部20bは、支点連結部222bを介して前記第1の左側支持部17bに回動自在に支持されている。また、左側連結リンク部10bと左外側支持リンク部20bはリンク間連結部24bによって回動自在に連結されている。
第2の可動部4に連結されている右内側支持リンク部30aは、内側リンク間連結部332aを介して右側連結リンク部10aに回動自在に連結されており、同じく第2の可動部4に連結されている左内側支持リンク部30bは、内側リンク間連結部332bを介して左側連結リンク部10bに回動自在に連結されている。
右側のリンク間連結部24aと内側リンク間連結部332a、および左側のリンク間連結部24bと内側リンク間連結部332bは、全て横中心線Ox上で同一線上に位置している。前記横中心線Oxは、リンク部と第1の可動部2との前方(X1側)での連結部23a,14bと、後方(X2側)での連結部23b,14aとの中点に位置している。
右側連結リンク部10aと左側連結リンク部10bが支点連結部16a,16bを支点として回動すると、これに合わせて、右内側支持リンク部30aが内側リンク間連結部332aを支点として回動し、左内側支持リンク部30bが内側リンク間連結部332bを支点として回動する。そして、第2の可動部4が、第1の可動部2との平行姿勢を維持したまま、第1の可動部2と逆向きに動作するようになる。
図11と図12に示す可動センサ301は、固定部50に固定される支持部が、第1の右側支持部17aと第1の左側支持部17bだけであるため、熱応力などによって固定部50に反りが生じても、各リンク部の支点部の位置にずれが生じるのを抑制でき、オフセットノイズをさらに低減しやすくなる。
図1と図2に示す可動センサ1と、図6と図7に示す可動センサ101、ならびに図9と図10に示す可動センサ201、さらには図11と図12に示す可動センサ301は、共に長方形のシリコン基板から切り出されているために、小型で薄型に構成することができる。また表面と裏面から突出する部材が無いため、支持構造や固定電極51,52を支持する固定部50を容易に位置決めできる。
図11には、第1の可動部2に対向する第1の固定電極51と、第2の可動部に対向する第2の固定電極52とが破線で示されている。
第1の固定電極51は、その全体が第1の可動部2に対向し、第1の固定電極51の縁部は、第1の可動部2の縁部の内側に距離を空けて配置されている。第2の固定電極52は、その全体が第2の可動部4に対向し、第2の固定電極52の縁部は、第2の可動部4の縁部の内側に距離を空けて配置されている。その結果、その全体が第1の可動電極として機能する第1の可動部2と、その全体が第2の可動電極として機能する第2の可動部4が、X方向またはY方向に振動などで動いたとしても、第1の可動部2と第1の固定電極51との対向面積、および第2の可動部4と第2の固定電極52との対向面積が減少することがなく、常に静電容量の変化を正確に検知できるようになる。
また、第1の固定電極51,51の面積と、第2の固定電極52の面積は、図8に示す可変コンデンサーCaと可変コンデンサーCbの容量が等しくなるように設定されている。
1,101,201 可動センサ
2 第1の可動部
4 第2の可動部
10a 右側連結リンク部
10b 左側連結リンク部
14a,14b,15a,15b 連結部
16a,16b 支点連結部
17a 第1の右側支持部
17b 第1の左側支持部
20a 右外側支持リンク部
20b 左外側支持リンク部
21a 第2の右側支持部
21b 第2の左側支持部
22a,22b 支点連結部
23a,23b 連結部
24a,24b リンク間連結部
30a 右内側支持リンク部
30b 左内側支持リンク部
31a 第3の右側支持部
31b 第3の左側支持部
32a,32b 支点連結部
33a,33b 連結部
50 固定部
51 第1の固定電極
52 第2の固定電極
132a,132b 支点連結部
222a,222b 支点連結部
231a 第2の右側支持部
231b 第2の左側支持部
332a,232b 内側リンク間連結部
2 第1の可動部
4 第2の可動部
10a 右側連結リンク部
10b 左側連結リンク部
14a,14b,15a,15b 連結部
16a,16b 支点連結部
17a 第1の右側支持部
17b 第1の左側支持部
20a 右外側支持リンク部
20b 左外側支持リンク部
21a 第2の右側支持部
21b 第2の左側支持部
22a,22b 支点連結部
23a,23b 連結部
24a,24b リンク間連結部
30a 右内側支持リンク部
30b 左内側支持リンク部
31a 第3の右側支持部
31b 第3の左側支持部
32a,32b 支点連結部
33a,33b 連結部
50 固定部
51 第1の固定電極
52 第2の固定電極
132a,132b 支点連結部
222a,222b 支点連結部
231a 第2の右側支持部
231b 第2の左側支持部
332a,232b 内側リンク間連結部
Claims (15)
- 可動部と固定部に互いに対向する電極が設けられ、前記可動部が前記固定部と接近しまたは離反する際の前記電極間の静電容量の変化を検出する可動センサにおいて、
第1の可動部および第2の可動部と、前記両可動部のそれぞれに回動自在に連結されたリンク部とを有し、前記リンク部は、前記第1の可動部との連結部と前記第2の可動部との連結部の間に支点が設定されて、前記リンク部が前記支点を中心に回動したときに、前記第1の可動部と前記第2の可動部の一方が固定部に接近し他方が前記固定部から離れるように動作可能であり、
前記第1の可動部に第1の可動電極が前記第2の可動部に第2の可動電極が、それぞれの可動部の同じ方向に向く面に設けられ、前記固定部には、前記第1の可動電極に対向する第1の固定電極と、前記第2の可動電極に対向する第2の固定電極とが設けられていることを特徴とする可動センサ。 - 前記第1の可動電極と前記第1の固定電極との間の静電容量の変化と、前記第2の可動電極と前記第2の固定電極との間の静電容量の変化の差を求める検出回路を有する請求項1記載の可動センサ。
- 前記第1の可動部の質量と前記第2の可動部の質量のいずれか一方が他方よりも大きく、質量の大きい前記可動部が外部から与えられる加速度に反応して移動し、このとき質量の小さい前記可動部が質量の大きい前記可動部と逆向きに移動する請求項1または2記載の可動センサ。
- 前記第1の可動部と前記第2の可動部とが同じ厚みを有し、前記第1の可動部と前記第2の可動部の表面どうしと裏面どうしが同一面となったときに、前記リンク部、ならびに前記リンク部を回動自在に支持する支持部が、前記表面と前記裏面との厚みの範囲内に収まる請求項1ないし3のいずれかに記載の可動センサ。
- 前記第1の可動部と前記第2の可動部と前記リンク部および前記支持部が、同じ板材から切り出されている請求項4記載の可動センサ。
- 前記第1の可動部と前記リンク部との連結部、前記第2の可動部と前記リンク部との連結部、および前記リンク部と前記支持部との前記支点での連結部は、それぞれの部材間が前記板材の一部で形成したトーションバーを介して回動自在に連結されている請求項5記載の可動センサ。
- 前記第1の可動部と前記第2の可動部が導電性材料で形成され、前記第1の可動部自体が前記第1の可動電極として機能し、前記第2の可動部自体が前記第2の可動電極として機能する請求項1ないし6のいずれかに記載の可動センサ。
- 前記リンク部として、左右方向(Y)に間隔を空けて前後方向(X)に延びる右側連結リンク部と左側連結リンク部とが設けられ、前記右側連結リンク部は右側支点を介して第1の右側支持部に回動自在に支持され、前記左側連結リンク部は左側支点を介して第1の左側支持部に回動自在に支持されており、
前記右側連結リンク部と前記第1の可動部との連結部と、前記左側連結リンク部と前記第1の可動部との連結部の、いずれか一方が前方(X1)に位置し、他方が後方(X2)に位置し、
前記右側連結リンク部と前記第2の可動部との連結部が、前記右側支点を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、前記左側連結リンク部と前記第2の可動部との連結部が、前記左側支点を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記第1の右側支持部と前記第1の左側支持部が前記固定部に固定されている請求項1ないし7のいずれかに記載の可動センサ。 - 右外側支持リンク部が前記第1の右側支持部と前記第1の可動部とに回動自在に連結され、前記右外側支持リンク部と前記第1の可動部との連結部が、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、
左外側支持リンク部が前記第1の左側支持部と前記第1の可動部とに回動自在に連結され、前記左外側支持リンク部と前記第1の可動部との連結部が、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置している請求項8記載の可動センサ。 - 第2の右側支持部と第2の左側支持部とが設けられ、
右内側支持リンク部が前記第2の右側支持部と前記第2の可動部とに回動自在に連結され、前記右内側支持リンク部と前記第2の可動部との連結部が、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
左内側支持リンク部が前記第2の左側支持部と前記第2の可動部とに回動自在に連結され、前記左内側支持リンク部と前記第2の可動部との連結部が、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置している請求項8または9記載の可動センサ。 - 前記第1の右側支持部と前記第1の左側支持部とが、左右方向(Y)に延びる同一線上に配置されている請求項8または9記載の可動センサ。
- 前記第1の右側支持部と前記第1の左側支持部、および前記第2の右側支持部と前記第2の左側支持部とが、左右方向(Y)に延びる同一線上に配置されている請求項10記載の可動センサ。
- 右外側支持リンク部がリンク間連結部を介して前記右側連結リンク部に回動自在に連結され、左外側支持リンク部がリンク間連結部を介して前記左側連結リンク部に回動自在に連結され、
前記右外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記右側連結リンク部と前記第1の可動部との連結部と前後逆側に位置し、
前記左外側支持リンク部と前記第1の可動部との連結部が、前記リンク間連結部を挟んで、前記左側連結リンク部と前記第1の可動部との連結部と前後逆側に位置しており、
前記右外側支持リンク部と前記第1の可動部との連結部と、前記左外側支持リンク部と前記第1の可動部との連結部が、前後逆側に位置している請求項8記載の可動センサ。 - 右内側支持リンク部が内側リンク間連結部を介して前記右側連結リンク部に回動自在に連結され、左内側支持リンク部が内側リンク間連結部を介して前記左側連結リンク部に回動自在に連結され、
前記右内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記右側連結リンク部と前記第2の可動部との連結部と前後逆側に位置し、
前記左内側支持リンク部と前記第2の可動部との連結部が、前記内側リンク間連結部を挟んで、前記左側連結リンク部と前記第2の可動部との連結部と前後逆側に位置しており、
前記右内側支持リンク部と前記第2の可動部との連結部と、前記左内側支持リンク部と前記第2の可動部との連結部が、前後逆側に位置している請求項13記載の可動センサ。 - 前記リンク間連結部と前記内側リンク間連結部とが、左右方向(Y)に延びる同一線上に配置されている請求項13または14記載の可動センサ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN2009801256050A CN102084258B (zh) | 2008-07-04 | 2009-07-02 | 静电容量检测型的可动传感器 |
| EP09773525A EP2315039A4 (en) | 2008-07-04 | 2009-07-02 | CAPACITY DETECTION TYPE MOBILE SENSOR |
| JP2010519098A JP5193300B2 (ja) | 2008-07-04 | 2009-07-02 | 静電容量検出型の可動センサ |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-176155 | 2008-07-04 | ||
| JP2008176155 | 2008-07-04 | ||
| JP2009-081944 | 2009-03-30 | ||
| JP2009081944 | 2009-03-30 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2010001947A1 true WO2010001947A1 (ja) | 2010-01-07 |
Family
ID=41466038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/062082 WO2010001947A1 (ja) | 2008-07-04 | 2009-07-02 | 静電容量検出型の可動センサ |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP2315039A4 (ja) |
| JP (1) | JP5193300B2 (ja) |
| CN (1) | CN102084258B (ja) |
| WO (1) | WO2010001947A1 (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010140574A1 (ja) * | 2009-06-03 | 2010-12-09 | アルプス電気株式会社 | 物理量センサ |
| WO2011111539A1 (ja) * | 2010-03-08 | 2011-09-15 | アルプス電気株式会社 | 物理量センサ |
| CN102449489A (zh) * | 2009-06-03 | 2012-05-09 | 阿尔卑斯电气株式会社 | 物理量传感器 |
| WO2013105591A1 (ja) * | 2012-01-11 | 2013-07-18 | アルプス電気株式会社 | 物理量センサ |
| JP2013250125A (ja) * | 2012-05-31 | 2013-12-12 | Alps Electric Co Ltd | Memsセンサ |
| JP2014212159A (ja) * | 2013-04-17 | 2014-11-13 | アルプス電気株式会社 | 可変容量コンデンサ |
| JP5922249B2 (ja) * | 2012-10-11 | 2016-05-24 | アルプス電気株式会社 | 可変容量コンデンサ |
| US20220120781A1 (en) * | 2020-10-15 | 2022-04-21 | Robert Bosch Gmbh | Micromechanical z-inertial sensor |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014181929A (ja) * | 2013-03-18 | 2014-09-29 | Yamaha Corp | 静電型センサおよびスライド操作装置 |
| ITTO20130237A1 (it) | 2013-03-22 | 2014-09-23 | St Microelectronics Srl | Struttura microelettromeccanica di rilevamento ad asse z ad elevata sensibilita', in particolare per un accelerometro mems |
| US10371715B2 (en) * | 2013-12-23 | 2019-08-06 | Invensense, Inc. | MEMS accelerometer with proof masses moving in an anti-phase direction |
| US8973439B1 (en) * | 2013-12-23 | 2015-03-10 | Invensense, Inc. | MEMS accelerometer with proof masses moving in anti-phase direction normal to the plane of the substrate |
| US9840409B2 (en) * | 2015-01-28 | 2017-12-12 | Invensense, Inc. | Translating Z axis accelerometer |
| US10429407B2 (en) | 2017-03-27 | 2019-10-01 | Nxp Usa, Inc. | Three-axis inertial sensor for detecting linear acceleration forces |
| US10809277B2 (en) * | 2017-12-18 | 2020-10-20 | Nxp Usa, Inc. | Single axis inertial sensor with suppressed parasitic modes |
| DE112021006521T5 (de) | 2020-12-18 | 2023-12-07 | Analog Devices, Inc. | Beschleunigungsmesser mit translationsbewegung von massen |
| FI131003B1 (en) | 2023-05-12 | 2024-07-29 | Thermo Fisher Scientific Oy | Cadence schedule for sample platforms and method for cadence of sample platforms |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003014778A (ja) | 2001-04-26 | 2003-01-15 | Samsung Electronics Co Ltd | 垂直変位測定及び駆動構造体とその製造方法 |
| WO2003044539A1 (fr) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Accelerometre |
| US20050092107A1 (en) * | 2003-10-29 | 2005-05-05 | Honeywell International, Inc. | Out-of-plane compensation suspension for an accelerometer |
| JP2006266873A (ja) | 2005-03-24 | 2006-10-05 | Denso Corp | 加速度センサおよびその製造方法 |
| JP2007298385A (ja) | 2006-04-28 | 2007-11-15 | Matsushita Electric Works Ltd | 静電容量式センサ |
| JP2008139282A (ja) * | 2006-11-09 | 2008-06-19 | Mitsubishi Electric Corp | 加速度センサ |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2728807B2 (ja) * | 1991-07-24 | 1998-03-18 | 株式会社日立製作所 | 静電容量式加速度センサ |
| US5220835A (en) * | 1991-09-12 | 1993-06-22 | Ford Motor Company | Torsion beam accelerometer |
| FR2739190B1 (fr) * | 1995-09-26 | 1997-11-28 | Onera (Off Nat Aerospatiale) | Transducteur monolithique d'acceleration |
| JP4178192B2 (ja) * | 1998-04-22 | 2008-11-12 | ミツミ電機株式会社 | 物理量検出センサ |
| JP2003329444A (ja) * | 2002-03-07 | 2003-11-19 | Alps Electric Co Ltd | 静電容量式センサ |
| US6935175B2 (en) * | 2003-11-20 | 2005-08-30 | Honeywell International, Inc. | Capacitive pick-off and electrostatic rebalance accelerometer having equalized gas damping |
-
2009
- 2009-07-02 CN CN2009801256050A patent/CN102084258B/zh not_active Expired - Fee Related
- 2009-07-02 JP JP2010519098A patent/JP5193300B2/ja not_active Expired - Fee Related
- 2009-07-02 WO PCT/JP2009/062082 patent/WO2010001947A1/ja active Application Filing
- 2009-07-02 EP EP09773525A patent/EP2315039A4/en not_active Withdrawn
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003014778A (ja) | 2001-04-26 | 2003-01-15 | Samsung Electronics Co Ltd | 垂直変位測定及び駆動構造体とその製造方法 |
| WO2003044539A1 (fr) * | 2001-11-19 | 2003-05-30 | Mitsubishi Denki Kabushiki Kaisha | Accelerometre |
| US20050092107A1 (en) * | 2003-10-29 | 2005-05-05 | Honeywell International, Inc. | Out-of-plane compensation suspension for an accelerometer |
| JP2006266873A (ja) | 2005-03-24 | 2006-10-05 | Denso Corp | 加速度センサおよびその製造方法 |
| JP2007298385A (ja) | 2006-04-28 | 2007-11-15 | Matsushita Electric Works Ltd | 静電容量式センサ |
| JP2008139282A (ja) * | 2006-11-09 | 2008-06-19 | Mitsubishi Electric Corp | 加速度センサ |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2315039A4 |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010140574A1 (ja) * | 2009-06-03 | 2010-12-09 | アルプス電気株式会社 | 物理量センサ |
| CN102449489A (zh) * | 2009-06-03 | 2012-05-09 | 阿尔卑斯电气株式会社 | 物理量传感器 |
| WO2011111539A1 (ja) * | 2010-03-08 | 2011-09-15 | アルプス電気株式会社 | 物理量センサ |
| CN102770770A (zh) * | 2010-03-08 | 2012-11-07 | 阿尔卑斯电气株式会社 | 物理量传感器 |
| WO2013105591A1 (ja) * | 2012-01-11 | 2013-07-18 | アルプス電気株式会社 | 物理量センサ |
| JP2013250125A (ja) * | 2012-05-31 | 2013-12-12 | Alps Electric Co Ltd | Memsセンサ |
| JP5922249B2 (ja) * | 2012-10-11 | 2016-05-24 | アルプス電気株式会社 | 可変容量コンデンサ |
| JP2014212159A (ja) * | 2013-04-17 | 2014-11-13 | アルプス電気株式会社 | 可変容量コンデンサ |
| US20220120781A1 (en) * | 2020-10-15 | 2022-04-21 | Robert Bosch Gmbh | Micromechanical z-inertial sensor |
| US11585830B2 (en) * | 2020-10-15 | 2023-02-21 | Robert Bosch Gmbh | Micromechanical z-inertial sensor |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2315039A1 (en) | 2011-04-27 |
| JPWO2010001947A1 (ja) | 2011-12-22 |
| EP2315039A4 (en) | 2012-10-10 |
| CN102084258B (zh) | 2012-08-08 |
| CN102084258A (zh) | 2011-06-01 |
| JP5193300B2 (ja) | 2013-05-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5193300B2 (ja) | 静電容量検出型の可動センサ | |
| US11808574B2 (en) | Micromechanical detection structure of a MEMS multi-axis gyroscope, with reduced drifts of corresponding electrical parameters | |
| US9081027B2 (en) | Yaw-rate sensor | |
| EP2284488A1 (en) | Microelectromechanical z-axis detection structure with low thermal drifts | |
| EP3499244B1 (en) | Single axis inertial sensor with suppressed parasitic modes | |
| JP5898571B2 (ja) | Memsセンサ | |
| WO2009099123A1 (ja) | 物理量センサ及びその製造方法 | |
| JP6175868B2 (ja) | Mems装置 | |
| JP5089807B2 (ja) | 物理量センサ | |
| JP2010164569A (ja) | 多軸加速度センサ | |
| JP6167842B2 (ja) | 静電容量型センサ | |
| JP5747092B2 (ja) | 物理量センサ | |
| JP2014115081A (ja) | 物理量センサ | |
| US9764943B2 (en) | MEMS structure | |
| JP2009063430A (ja) | 2軸静電容量型加速度センサ、及び2軸静電容量型加速度計 | |
| JP2012078121A (ja) | 物理量センサ | |
| JP2010216837A (ja) | 力学量検出センサ | |
| JPH0972930A (ja) | 加速度検出素子 | |
| WO2015186740A1 (ja) | Mems構造体 | |
| JP2014115082A (ja) | 物理量センサ | |
| WO2015190363A1 (ja) | Mems構造体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 200980125605.0 Country of ref document: CN |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09773525 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2010519098 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009773525 Country of ref document: EP |