WO2009099026A1 - モータ制御装置及びこれを備える車両用操舵装置 - Google Patents
モータ制御装置及びこれを備える車両用操舵装置 Download PDFInfo
- Publication number
- WO2009099026A1 WO2009099026A1 PCT/JP2009/051699 JP2009051699W WO2009099026A1 WO 2009099026 A1 WO2009099026 A1 WO 2009099026A1 JP 2009051699 W JP2009051699 W JP 2009051699W WO 2009099026 A1 WO2009099026 A1 WO 2009099026A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- layer
- power supply
- circuit board
- control device
- motor control
- Prior art date
Links
- 239000003990 capacitor Substances 0.000 claims description 13
- 238000010276 construction Methods 0.000 abstract 1
- 238000010891 electric arc Methods 0.000 abstract 1
- 230000007246 mechanism Effects 0.000 description 25
- 230000002093 peripheral effect Effects 0.000 description 16
- 239000004020 conductor Substances 0.000 description 14
- 230000005540 biological transmission Effects 0.000 description 9
- 238000004804 winding Methods 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 238000001514 detection method Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 229910000838 Al alloy Inorganic materials 0.000 description 2
- XEEYBQQBJWHFJM-UHFFFAOYSA-N Iron Chemical compound [Fe] XEEYBQQBJWHFJM-UHFFFAOYSA-N 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 238000010030 laminating Methods 0.000 description 2
- 238000005192 partition Methods 0.000 description 2
- 239000010409 thin film Substances 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 1
- 235000012489 doughnuts Nutrition 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/04—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear
- B62D5/0403—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box
- B62D5/0406—Power-assisted or power-driven steering electrical, e.g. using an electric servo-motor connected to, or forming part of, the steering gear characterised by constructional features, e.g. common housing for motor and gear box including housing for electronic control unit
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/30—Structural association with control circuits or drive circuits
- H02K11/33—Drive circuits, e.g. power electronics
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K11/00—Structural association of dynamo-electric machines with electric components or with devices for shielding, monitoring or protection
- H02K11/40—Structural association with grounding devices
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K7/00—Arrangements for handling mechanical energy structurally associated with dynamo-electric machines, e.g. structural association with mechanical driving motors or auxiliary dynamo-electric machines
- H02K7/10—Structural association with clutches, brakes, gears, pulleys or mechanical starters
- H02K7/116—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears
- H02K7/1163—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion
- H02K7/1166—Structural association with clutches, brakes, gears, pulleys or mechanical starters with gears where at least two gears have non-parallel axes without having orbital motion comprising worm and worm-wheel
Definitions
- the present invention relates to a motor control device and a vehicle steering device including the same.
- the motor control device of the present invention includes control boards (31, 32) for driving and controlling the electric motor (18), and the control board includes a multilayer circuit board having an inner layer and an outer layer.
- a ground pattern (57) disposed around the output shaft of the electric motor (18) is formed on one of the inner layers, and a part of the ground pattern (57) includes the ground pattern (57). 57) is formed so as to penetrate the radial direction of the output shaft.
- FIG. 3 is a schematic external view of a steering assist mechanism. It is an illustration exploded perspective view of a motor control device. It is a typical perspective view which shows the structure of the principal part of a 1st multilayer circuit board. It is a block diagram which shows the principal part of the electrical structure of a motor control apparatus.
- the steering assist mechanism 5 includes an electric motor 18 for assisting steering, a speed reduction mechanism 19 that decelerates the output rotation of the electric motor 18, and a motor control device 29 that controls driving of the electric motor 18.
- a three-phase brushless motor is used as the electric motor 18.
- the speed reduction mechanism 19 includes a worm shaft 20 as a drive gear and a worm wheel 21 as a driven gear that meshes with the worm shaft 20.
- the worm shaft 20 is connected to an output shaft (not shown) of the electric motor 18 via a power transmission joint (not shown).
- the worm wheel 21 is connected to the output shaft 9 of the steering shaft 6 so as to be able to rotate together.
- the electric motor 18 rotationally drives the worm shaft 20
- the worm wheel 21 is rotationally driven by the worm shaft 20, and the worm wheel 21 and the output shaft 9 rotate together.
- the output of the electric motor 18 as a steering assist force is transmitted to the steering mechanism 4 to assist the driver's steering.
- FIG. 4 is a schematic perspective view showing the configuration of the main part of the first multilayer circuit board 31.
- a first multilayer circuit board 31 is a multilayer circuit board formed by laminating a plurality of annular layers in which through holes made of round holes are formed, and each layer is made of an insulator or a dielectric. Formed of a thin substrate.
- the first multilayer circuit board 31 includes, for example, first to fourth layers 51 to 54.
- the outer peripheral edge of the first multilayer circuit board 31 may have a rectangular shape.
- the shortest distance between the one end portion 57a and the other end portion 57b in the circumferential direction of the ground pattern 57 is set as appropriate, but is set to such an extent that a short circuit of current does not occur at least between them.
- the ground pattern 57 is formed on most of the third layer 53 excluding the inner peripheral edge and the outer peripheral edge.
- the second multilayer circuit board 32 is the first except that the mounted components are different such that an FET driver 77 described later is mounted instead of the arithmetic circuit 71. Since the configuration is substantially the same as that of the multilayer circuit board 31, detailed description thereof is omitted. Similarly, the drive circuit board 33 has substantially the same configuration as that of the first multilayer circuit board 31 except that the mounted parts are different, such as a switching element 86 to be described later being mounted instead of the arithmetic circuit 71. Therefore, detailed description is omitted.
- the relay device 79 includes a switch 81.
- One end of the switch 81 is connected to the positive electrode of the power source 59.
- the other end of the switch 81 is connected to one end of each series circuit 80U, 80V, 80W via a coil 82.
- the coil 82 has one end connected to the other end of the switch 81, and the other end connected to one end of the series circuits 80 U, 80 V, 80 W and one end of the capacitor 88.
- the other end of the capacitor 88 is connected to the negative electrode of the power source 59.
- the coil 82 and the capacitor 88 constitute a noise filter.
- the drive circuit board 33 is provided with a relay 83 as a motor relay.
- the relay 83 is between a connection point 84U described later of the series circuit 80U and a U-phase winding 85U of the electric motor 18, and between a connection point 84V described later of the series circuit 80V and a V-phase winding 85V of the electric motor 18. Is intervened.
- the switch 81 When the switch 81 is turned on, the power source 59 is connected to each series circuit 80U, 80V, 80W.
- the sources of the other switching elements 86U2, 86V2, and 86W2 of the series circuits 80U, 80V, and 80W are connected to the power source 59 through corresponding resistors 87, respectively.
- the gates of the switching elements 86U1 to 86W2 are connected to the FET driver 77.
- the arithmetic circuit 71 calculates the current to flow through the phase windings 85U, 85V, 85W of the electric motor 18 based on the output signals of the torque sensor 11 and the vehicle speed sensor 73. Set the target current value.
- the present invention may be applied to other general devices including an electric motor control device.
Abstract
操舵補助用の電動モータ18を駆動制御するための制御基板として、第1の多層回路基板31が設けられている。第1の多層回路基板31は、中央に貫通孔55を有する環状の多層回路基板であり、接地層としての第3の層53と電源層としての第2の層52とを含む。第3の層53に、電動モータの出力軸30の回りに配置された円弧状の接地パターン57が形成され、第2の層52には接地パターン57とほぼ同一形状の電源パターン56が形成されている。モータ制御装置のノイズをより低減することができる。
Description
本発明はモータ制御装置及びこれを備える車両用操舵装置に関するものである。
電動モータは、モータ制御装置によって駆動制御される(例えば、特許文献1参照)。
特開2005-278344号公報
モータ制御装置及び電動モータをより小型化するために、モータ制御装置と電動モータとを隣接配置することが考えられる。具体的には、制御装置と電動モータとをモータの軸方向に並べて配置し、制御装置がモータ出力軸を取り囲むようにすることが考えられる。制御装置の回路基板は、モータ出力軸を挿通できるように、ドーナツ状に形成される。
このような小型のモータ制御装置において、ノイズをより低減することが要請されている。本発明は、この課題を解決することを目的とする。
このような小型のモータ制御装置において、ノイズをより低減することが要請されている。本発明は、この課題を解決することを目的とする。
下記において、括弧内の参照符号は、後述する発明の実施の形態における対応構成要素の参照符号を表すものであるが、これらの参照符号により特許請求の範囲を限定する趣旨ではない。
前記目的を達成するため、本発明のモータ制御装置は、電動モータ(18)を駆動制御するための制御基板(31,32)を備え、前記制御基板は内層及び外層を有する多層回路基板を含み、前記内層のうちの一層には、前記電動モータ(18)の出力軸の回りに配置された接地パターン(57)が形成され、前記接地パターン(57)の一部には、前記接地パターン(57)を出力軸の径方向に貫くようにして切欠部(57c)が形成されている。
前記目的を達成するため、本発明のモータ制御装置は、電動モータ(18)を駆動制御するための制御基板(31,32)を備え、前記制御基板は内層及び外層を有する多層回路基板を含み、前記内層のうちの一層には、前記電動モータ(18)の出力軸の回りに配置された接地パターン(57)が形成され、前記接地パターン(57)の一部には、前記接地パターン(57)を出力軸の径方向に貫くようにして切欠部(57c)が形成されている。
本発明によれば、接地パターン(57)が切欠部(57c)のために円弧状に形成されることにより、接地パターン(57)において、出力軸の周囲を環状に流れる電流としてのループ電流が生じることを防止できる。その結果、ループ電流の発生に起因する電磁ノイズを防止できる。
また、前記多層回路基板は、内層として電源層(52)を含み、電源層(52)に、電動モータ(18)の出力軸の回りに配置された円弧状の電源パターン(56)が形成され、前記電源パターン(56)の一部には、前記電源パターン(56)を出力軸の径方向に貫くようにして切欠部(56c)が形成されていることが好ましい。
また、前記多層回路基板は、内層として電源層(52)を含み、電源層(52)に、電動モータ(18)の出力軸の回りに配置された円弧状の電源パターン(56)が形成され、前記電源パターン(56)の一部には、前記電源パターン(56)を出力軸の径方向に貫くようにして切欠部(56c)が形成されていることが好ましい。
この場合、電源パターン(56)が切欠部(56c)のために円弧状に形成されることにより、電源パターン(56)において、出力軸の周囲を環状に流れる電流としてのループ電流が生じることを防止できる。その結果、ループ電流の発生に起因する電磁ノイズをより確実に防止できる。
前記電源パターン(56)は、前記接地パターン(57)に対向するように配置された場合、前記電源パターン(56)及び前記接地パターン(57)によってキャパシタが形成される。このキャパシタにより、モータ制御装置から発生するノイズを平滑化することができる。
前記電源パターン(56)は、前記接地パターン(57)に対向するように配置された場合、前記電源パターン(56)及び前記接地パターン(57)によってキャパシタが形成される。このキャパシタにより、モータ制御装置から発生するノイズを平滑化することができる。
前記接地パターン(57)に形成された切欠部(57c)と、前記電源パターン(56)に形成された切欠部(56c)とは、平面視してほぼ同一の位置に存在することが好ましい。このようにキャパシタの形成に寄与しない切欠部(57c,56c)をほぼ同一の位置に配置することにより、電源パターン(56)と接地パターン(57)との対向面積を大きくし、キャパシタの容量を大きくすることができる。
また、本発明において、前記多層回路基板は、互いに離隔する第1及び第2の多層回路基板(31,32)を含み、第1の多層回路基板は、電源回路(69)、演算回路(71)及びアナログ信号用インターフェース回路(70)を少なくとも実装し、第2の多層回路基板は、スイッチング素子(86U,86V,86W)を制御するドライバ(77)及び外部との通信回路(76)を少なくとも実装する場合がある。この場合、アナログ信号が入力される第1の多層回路基板と、デジタル信号が入力される第2の多層回路基板とを別体に形成していることにより、第2の多層回路基板から第1の多層回路基板に侵入してくるノイズを少なくでき、アナログ信号にノイズが入ることを抑制できる。
また、本発明は、前記のモータ制御装置を備えることを特徴とする車両用操舵装置(4)を提供するものである。この場合、電磁ノイズの影響を受け難い車両用操舵装置を実現できる。
本発明における上述の、又はさらに他の利点、特徴及び効果は、添付図面を参照して次に述べる実施形態の説明により明らかにされる。
本発明における上述の、又はさらに他の利点、特徴及び効果は、添付図面を参照して次に述べる実施形態の説明により明らかにされる。
1…電動パワーステアリング装置(車両用操舵装置)、18…電動モータ、29…モータ制御装置、30…出力軸、31…第1の多層回路基板(制御基板)、32…第2の多層回路基板(制御基板)、52…第2の層(電源層)、53…第3の層(接地層)、56…電源パターン、57…接地パターン、69…電源回路、70…アナログ信号用I/F回路、71…演算回路、76…通信回路、77…FETドライバ、86U,86V,86W…スイッチング素子。
図1は、本発明の一実施の形態に係るモータ制御装置を備える車両用操舵装置としての電動パワーステアリング装置1の概略構成を示す模式図である。
図1を参照して、電動パワーステアリング装置1は、ステアリングホイール等の操舵部材2と、操舵部材2の回転に連動して転舵輪3を転舵する転舵機構4と、運転者の操舵を補助する操舵補助機構5とを備えている。転舵機構4としては、例えばラックアンドピニオン機構が用いられている。
図1を参照して、電動パワーステアリング装置1は、ステアリングホイール等の操舵部材2と、操舵部材2の回転に連動して転舵輪3を転舵する転舵機構4と、運転者の操舵を補助する操舵補助機構5とを備えている。転舵機構4としては、例えばラックアンドピニオン機構が用いられている。
操舵部材2と転舵機構4とは、ステアリングシャフト6及び中間軸7等を介して機械的に連結されている。操舵部材2の回転は、ステアリングシャフト6及び中間軸7等を介して転舵機構4に伝達されるようになっている。また、転舵機構4に伝達された回転は、後述するラック軸14の軸方向移動に変換されるようになっている。これにより、転舵輪3が転舵される。
ステアリングシャフト6は、直線状に延びており、操舵部材2に連結された入力軸8と、中間軸7に連結された出力軸9とを含む。入力軸8と出力軸9とは、トーションバー10を介して同一軸線上で相対回転可能に連結されている。すなわち、操舵部材2に一定値以上の操舵トルクが入力されると、入力軸8及び出力軸9は、互いに相対回転しつつ同一方向に回転するようになっている。
ステアリングシャフト6の周囲に配置されたトルクセンサ11は、入力軸8及び出力軸9の相対回転変位量に基づいて、操舵部材2に入力された操舵トルクを検出する。また、トルクセンサ11のトルク検出結果は、モータ制御装置29に入力される。中間軸7は、ステアリングシャフト6と転舵機構4とを連結している。
転舵機構4は、ピニオン軸13と、ラック軸14とを含む。ラック軸14の各端部には、タイロッド15及びナックルアーム(図示せず)を介して転舵輪3が連結されている。ピニオン軸13は、中間軸7に連結されており、操舵部材2の操舵に連動して回転する。また、ピニオン軸13の先端(図1では下端)には、ピニオン16が連結されている。
転舵機構4は、ピニオン軸13と、ラック軸14とを含む。ラック軸14の各端部には、タイロッド15及びナックルアーム(図示せず)を介して転舵輪3が連結されている。ピニオン軸13は、中間軸7に連結されており、操舵部材2の操舵に連動して回転する。また、ピニオン軸13の先端(図1では下端)には、ピニオン16が連結されている。
ラック軸14は、自動車の左右方向に沿って直線状に延びている。ラック軸14の軸方向の途中部には、前記ピニオン16に噛み合うラック17が形成されている。このピニオン16及びラック17によって、ピニオン軸13の回転がラック軸14の軸方向移動に変換される。ラック軸14を軸方向に移動させることで、転舵輪3を転舵することができる。
操舵補助機構5は、操舵補助用の電動モータ18と、電動モータ18の出力回転を減速する減速機構19と、電動モータ18の駆動を制御するモータ制御装置29とを含む。電動モータ18としては、例えば、三相のブラシレスモータが用いられている。減速機構19は、駆動ギヤとしてのウォーム軸20と、このウォーム軸20と噛み合う従動ギヤとしてのウォームホイール21とを含む。
ウォーム軸20は、図示しない動力伝達継手を介して電動モータ18の出力軸(図示せず)に連結されている。ウォームホイール21は、ステアリングシャフト6の出力軸9に同行回転可能に連結されている。
電動モータ18がウォーム軸20を回転駆動すると、ウォーム軸20によってウォームホイール21が回転駆動され、ウォームホイール21及び出力軸9が同行回転する。これにより、操舵補助力としての電動モータ18の出力が、転舵機構4に伝達され、運転者の操舵が補助される。
電動モータ18がウォーム軸20を回転駆動すると、ウォーム軸20によってウォームホイール21が回転駆動され、ウォームホイール21及び出力軸9が同行回転する。これにより、操舵補助力としての電動モータ18の出力が、転舵機構4に伝達され、運転者の操舵が補助される。
モータ制御装置29は、トルクセンサ11からのトルク検出結果や車速センサ73からの車速検出結果等に基づいて電動モータ18の駆動を制御する。
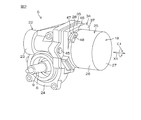
図2は、操舵補助機構5の図解的な外観図である。図1及び図2を参照して、減速機構19は、伝動ハウジングとしてのギヤハウジング22内に収容されている。
ギヤハウジング22は、例えば、アルミニウム合金を用いて形成されており、ウォーム軸20が収容された駆動ギヤ収容部23と、ウォームホイール21が収容された従動ギヤ収容部24とを含む。ステアリングシャフト6の出力軸9は、従動ギヤ収容部24の挿通孔を挿通している。
図2は、操舵補助機構5の図解的な外観図である。図1及び図2を参照して、減速機構19は、伝動ハウジングとしてのギヤハウジング22内に収容されている。
ギヤハウジング22は、例えば、アルミニウム合金を用いて形成されており、ウォーム軸20が収容された駆動ギヤ収容部23と、ウォームホイール21が収容された従動ギヤ収容部24とを含む。ステアリングシャフト6の出力軸9は、従動ギヤ収容部24の挿通孔を挿通している。
一方、電動モータ18は、カップ状のモータハウジング25を有している。モータハウジング25は、例えば、鉄を用いて形成されており、円筒状の周壁部26と、周壁部26の一端を閉塞する端壁27と、周壁部26の他端からその径方向外方に向かって張り出した円弧状のフランジ部28とを含む。フランジ部28は、電動モータ18の周方向C1に関して、例えば等間隔に2箇所設けられている。
モータハウジング25は、後述する制御ハウジング34を介して、ギヤハウジング22に連結されている。すなわち、ギヤハウジング22とモータハウジング25との間には、制御ハウジング34が介在している。制御ハウジング34は、電動モータ18に対して電動モータ18の軸方向X1に隣接している。
なお、以下では、電動モータ18の軸方向X1を単に「軸方向X1」といい、電動モータ18の周方向C1を単に「周方向C1」という。
なお、以下では、電動モータ18の軸方向X1を単に「軸方向X1」といい、電動モータ18の周方向C1を単に「周方向C1」という。
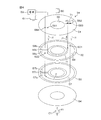
図3は、モータ制御装置29の図解的な分解斜視図である。図3を参照して、モータ制御装置29は、第1の多層回路基板31と、第2の多層回路基板32と、駆動回路基板33と、これらの回路基板31~33を収容するハウジングとしての制御ハウジング34とを備えている。
制御ハウジング34は、例えば、アルミニウム合金を用いて形成されており、一端が開放した概ね四角箱型の部材である。制御ハウジング34は、本体部35と筒状部36とを含む。本体部35及び筒状部36は、単一の部材で一体に形成されている。
制御ハウジング34は、例えば、アルミニウム合金を用いて形成されており、一端が開放した概ね四角箱型の部材である。制御ハウジング34は、本体部35と筒状部36とを含む。本体部35及び筒状部36は、単一の部材で一体に形成されている。
本体部35は、底壁37と、底壁37の外周縁部に設けられた概ね四角筒状の外周壁38と、外周壁38の一端(図3では上端)から本体部35の外側に向かって張り出した環状のフランジ39とを含む。筒状部36は、底壁37の中心部から立設され、本体部35の開放側に向かって延びている。筒状部36は、外周壁38に取り囲まれている。
外周壁38の内側に収容室S1が形成されている。収容室S1は、筒状部36の内側に形成される中心空間S2と、外周壁38と筒状部36との間に形成され、中心空間S2の周囲を取り囲む周囲空間S3とを含んでいる。筒状部36は、中心空間S2と周囲空間S3とを仕切る仕切り部材を構成している。
外周壁38の内側に収容室S1が形成されている。収容室S1は、筒状部36の内側に形成される中心空間S2と、外周壁38と筒状部36との間に形成され、中心空間S2の周囲を取り囲む周囲空間S3とを含んでいる。筒状部36は、中心空間S2と周囲空間S3とを仕切る仕切り部材を構成している。
中心空間S2には、電動モータ18の出力軸30が配置されている。すなわち、筒状部36の内側を、電動モータ18の出力軸30が挿通している。周囲空間S3には、各回路基板31~33が収容されている。
フランジ39は、外周壁38の一端に沿う環状部42と、環状部42の一部から本体部35の外側に向かって突出する複数(例えば、一対)の取付部43とを含む。各取付部43には、当該取付部43をその厚み方向に貫通する位置決め孔44が形成されている。
フランジ39は、外周壁38の一端に沿う環状部42と、環状部42の一部から本体部35の外側に向かって突出する複数(例えば、一対)の取付部43とを含む。各取付部43には、当該取付部43をその厚み方向に貫通する位置決め孔44が形成されている。
図2及び図3を参照して、制御ハウジング34は、位置決め孔44を挿通する固定ボルト45によって、ギヤハウジング22に固定されている。図2を参照して、制御ハウジング34の底壁37には、モータハウジング25側に向けて延びる環状の突合せ部46が設けられている。この突合せ部46には、モータハウジング25の前記フランジ部28に対応する位置にそれぞれ円弧状のフランジ部47が設けられている。これらのフランジ部28,47は、固定ボルト48を用いて互いに固定されている。
図4は、第1の多層回路基板31の要部の構成を示す模式的な斜視図である。図4を参照して、第1の多層回路基板31は、丸孔からなる貫通孔が形成された円環状の層を複数積層してなる多層回路基板であり、各層は絶縁体又は誘電体からなる薄い基板で形成されている。第1の多層回路基板31は、例えば、第1~第4の層51~54を含んでいる。なお、第1の多層回路基板31の外周縁部は、矩形形状をなしていてもよい。
この第1の多層回路基板31は、第1の層51、第2の層52、第3の層53及び第4の層54を軸方向X1に順次に積層してなる。すなわち、外層としての第1の層51及び第4の層54の間に、内層としての第2の層52及び第3の層53が積層配置される。第2の層52は電源層として機能し、第3の層53は接地層(グランド層)として機能する。
各層51~54の貫通孔は、それぞれ、対応する層51~54の径方向の中央に形成されており、互いに連通している。これらの貫通孔が、第1の多層回路基板31の貫通孔55を構成している。
第1の層51の表面は、第1の多層回路基板31の表面を構成している。
第2の層52の表面には、薄膜状をなす導電性の電源パターン56が形成されている。軸方向X1に沿って見たとき、すなわち平面視して、電源パターン56は、円弧状としての“C”形形状をなしている。換言すれば、電源パターン56は、貫通孔55を取り囲む有端環状をなして出力軸30の回りに配置されている。
第1の層51の表面は、第1の多層回路基板31の表面を構成している。
第2の層52の表面には、薄膜状をなす導電性の電源パターン56が形成されている。軸方向X1に沿って見たとき、すなわち平面視して、電源パターン56は、円弧状としての“C”形形状をなしている。換言すれば、電源パターン56は、貫通孔55を取り囲む有端環状をなして出力軸30の回りに配置されている。
電源パターン56の周方向に関する一端部56aと他端部56bとの間には、電源パターン56を径方向に貫くようにして切欠部56cが形成されている。この切欠部56cには電源パターン56が存在しないので、一端部56aと他端部56bとの間に、電流は流れない。
電源パターン56の周方向に関する一端部56aと他端部56bとの間の最短距離は、適宜設定されるが、少なくとも両者間で電流の短絡が生じない程度に設定される。第2の層52の径方向に関して、電源パターン56は、第2の層52の内周縁部及び外周縁部を除く大部分に形成されている。
電源パターン56の周方向に関する一端部56aと他端部56bとの間の最短距離は、適宜設定されるが、少なくとも両者間で電流の短絡が生じない程度に設定される。第2の層52の径方向に関して、電源パターン56は、第2の層52の内周縁部及び外周縁部を除く大部分に形成されている。
第3の層53の表面には、薄膜状をなす導電性の接地パターン(GNDパターン)57が形成されている。軸方向X1に沿って見たとき、すなわち平面視して、接地パターン57は、円弧状としての“C”形形状をなしている。換言すれば、接地パターン57は、貫通孔55を取り囲む有端環状をなして出力軸30の回りに配置されている。
接地パターン57の周方向に関する一端部57aと他端部57bとの間には、接地パターン57を径方向に貫くようにして切欠部57cが形成されている。この切欠部57cには接地パターン57が存在しないので、一端部57aと他端部57bとの間に、電流は流れない。接地パターン57の周方向に関する一端部57aと他端部57bとの間の最短距離は、適宜設定されるが、少なくとも両者間で電流の短絡が生じない程度に設定される。第3の層53の径方向に関して、接地パターン57は、第3の層53の内周縁部及び外周縁部を除く大部分に形成されている。
接地パターン57の周方向に関する一端部57aと他端部57bとの間には、接地パターン57を径方向に貫くようにして切欠部57cが形成されている。この切欠部57cには接地パターン57が存在しないので、一端部57aと他端部57bとの間に、電流は流れない。接地パターン57の周方向に関する一端部57aと他端部57bとの間の最短距離は、適宜設定されるが、少なくとも両者間で電流の短絡が生じない程度に設定される。第3の層53の径方向に関して、接地パターン57は、第3の層53の内周縁部及び外周縁部を除く大部分に形成されている。
このように接地パターン57を第3の層53の大部分に形成し、電源パターン56を、第2の層52の大部分に形成することにより、電源パターン56と接地パターン57との間に形成されるキャパシタの容量を大きくすることができる。
前記接地パターン57に形成された切欠部57cと、前記電源パターン56に形成された切欠部56cとは、軸方向X1に沿って見たとき、すなわち平面視して、ほぼ同一の位置に存在することが好ましい。このようにキャパシタの形成に寄与しない切欠部57c,56cをほぼ同一の位置に配置することにより、電源パターン56と接地パターン57との対向面積を最大にし、キャパシタの容量を最大にすることができる。
前記接地パターン57に形成された切欠部57cと、前記電源パターン56に形成された切欠部56cとは、軸方向X1に沿って見たとき、すなわち平面視して、ほぼ同一の位置に存在することが好ましい。このようにキャパシタの形成に寄与しない切欠部57c,56cをほぼ同一の位置に配置することにより、電源パターン56と接地パターン57との対向面積を最大にし、キャパシタの容量を最大にすることができる。
第4の層54の裏面は、第1の多層回路基板31の裏面を構成している。
これら第1~第4の層51~54は、軸方向X1に隣り合う層同士が、互いに固定されている。
第1の層51には、スルーホール581~584がそれぞれ貫通形成されている。
スルーホール581内には導体が挿通されている。この導体は、バッテリ等の電源59の正極に電気的に接続されるとともに、第2の層52の電源パターン56の一端部56aに電気的に接続されている。
これら第1~第4の層51~54は、軸方向X1に隣り合う層同士が、互いに固定されている。
第1の層51には、スルーホール581~584がそれぞれ貫通形成されている。
スルーホール581内には導体が挿通されている。この導体は、バッテリ等の電源59の正極に電気的に接続されるとともに、第2の層52の電源パターン56の一端部56aに電気的に接続されている。
スルーホール582内には導体が挿通されている。この導体は、第2の層52の電源パターン56のうちの、周方向C1に関する一端部56aと他端部56bとの略中間部に、電気的に接続されている。
スルーホール583内には導体が挿通されている。この導体は、第2の層52の電源パターン56に貫通形成されたスルーホール601の中を通って、第3の層53の接地パターン57のうちの、周方向C1に関する一端部57aと他端部57bとの略中間部に、電気的に接続されている。
スルーホール583内には導体が挿通されている。この導体は、第2の層52の電源パターン56に貫通形成されたスルーホール601の中を通って、第3の層53の接地パターン57のうちの、周方向C1に関する一端部57aと他端部57bとの略中間部に、電気的に接続されている。
第1の層51の表面に実装された後述する演算回路71などは、各前記スルーホール582内の導体及びスルーホール583内の導体のそれぞれと電気的に接続されている。
スルーホール584内には導体が挿通されている。この導体は、第2の層52の電源パターン56に貫通形成されたスルーホール602の中を通って、第3の層53の接地パターン57の一端部57aに接続されており、また、接地電位としての車体61を介して電源59の負極に電気的に接続されている。
スルーホール584内には導体が挿通されている。この導体は、第2の層52の電源パターン56に貫通形成されたスルーホール602の中を通って、第3の層53の接地パターン57の一端部57aに接続されており、また、接地電位としての車体61を介して電源59の負極に電気的に接続されている。
図3及び図4を参照して、第2の多層回路基板32は、演算回路71に代えて後述するFETドライバ77が実装されている等、実装されている部品が異なる点以外は、第1の多層回路基板31と概ね同様の構成であるので、詳細な説明を省略する。
同様に、駆動回路基板33は、演算回路71に代えて後述するスイッチング素子86が実装されている等、実装されている部品が異なる点以外は、第1の多層回路基板31と概ね同様の構成であるので、詳細な説明は省略する。
同様に、駆動回路基板33は、演算回路71に代えて後述するスイッチング素子86が実装されている等、実装されている部品が異なる点以外は、第1の多層回路基板31と概ね同様の構成であるので、詳細な説明は省略する。
図3を参照して、各回路基板31~33は、軸方向X1に沿って間隔を隔てて配置されており、収容室S1の周囲空間S3に収容されている。各回路基板31~33は、軸方向X1に沿って、第1の多層回路基板31、第2の多層回路基板32及び駆動回路基板33の順に並んで配置されている。第1の多層回路基板31及び第2の多層回路基板32は、それぞれ、電動モータ18を駆動制御するための制御基板を構成している。
各回路基板31~33の貫通孔55には、それぞれ、筒状部36及び電動モータ18の出力軸30が挿通されている。各回路基板31~33は、図示しないねじ部材等の固定部材を用いて、制御ハウジング34に固定されている。
第1の多層回路基板31と、第2の多層回路基板32とは、帯状のフレキシブル基板62及びこのフレキシブル基板62の両端部に設けられたコネクタ63,64を介して、電気的に接続されている。
第1の多層回路基板31と、第2の多層回路基板32とは、帯状のフレキシブル基板62及びこのフレキシブル基板62の両端部に設けられたコネクタ63,64を介して、電気的に接続されている。
また、第2の多層回路基板32と、駆動回路基板33とは、帯状のフレキシブル基板65及びこのフレキシブル基板65の両端部に設けられたコネクタ66,67を介して電気的に接続されている。
図5は、モータ制御装置29の電気的な構成の要部を示すブロック図である。図3及び図5を参照して、第1の多層回路基板31は、電源回路69と、アナログ信号用I/F(インターフェース)回路70と、演算回路71と、センサAMP回路72とを含んでいる。
図5は、モータ制御装置29の電気的な構成の要部を示すブロック図である。図3及び図5を参照して、第1の多層回路基板31は、電源回路69と、アナログ信号用I/F(インターフェース)回路70と、演算回路71と、センサAMP回路72とを含んでいる。
電源回路69は、電源59と接続されており、電源59から電力が供給される。
アナログ信号用I/F回路70は、トルクセンサ11と接続されており、このトルクセンサ11から、操舵トルクに関連する信号としての所定のアナログ信号が入力される。
演算回路71は、CPU、ROM及びRAM等から構成されており、トルクセンサ11や車速センサ73からの信号等に基づいて、電動モータ18へ供給する電力量を演算するものである。演算回路71は、電源回路69、アナログ信号用I/F回路70及びセンサAMP回路72のそれぞれに接続されている。
アナログ信号用I/F回路70は、トルクセンサ11と接続されており、このトルクセンサ11から、操舵トルクに関連する信号としての所定のアナログ信号が入力される。
演算回路71は、CPU、ROM及びRAM等から構成されており、トルクセンサ11や車速センサ73からの信号等に基づいて、電動モータ18へ供給する電力量を演算するものである。演算回路71は、電源回路69、アナログ信号用I/F回路70及びセンサAMP回路72のそれぞれに接続されている。
第1の多層回路基板31及び第2の多層回路基板32は、それぞれ、電動モータ18に供給される電力を制御するための制御回路を構成している。第2の多層回路基板32は、通信回路76と、FETドライバ77とを含んでいる。
通信回路76は、車速センサ73に接続されており、車速センサ73からのデジタル信号(パルス信号)が入力される。また、通信回路76は演算回路71に接続されている。
通信回路76は、車速センサ73に接続されており、車速センサ73からのデジタル信号(パルス信号)が入力される。また、通信回路76は演算回路71に接続されている。
FETドライバ77は、後述するスイッチング素子86U~86Wの駆動を制御するものである。このFETドライバ77は、演算回路71に接続されている。FETドライバ77には、演算回路71からのデジタル信号が入力される。
駆動回路基板33は、電動モータ18を駆動するためのものであり、電源リレーとしてのリレー装置79及び互いに並列に接続された3つの直列回路80U,80V,80Vを含んでいる。
駆動回路基板33は、電動モータ18を駆動するためのものであり、電源リレーとしてのリレー装置79及び互いに並列に接続された3つの直列回路80U,80V,80Vを含んでいる。
リレー装置79は、スイッチ81を備えている。スイッチ81の一端は、電源59の正極に接続されている。スイッチ81の他端部は、コイル82を介して、各直列回路80U,80V,80Wの一端部に接続されている。コイル82は、一端部がスイッチ81の他端部に接続されるとともに、他端部が、直列回路80U,80V,80Wの一端部及びコンデンサ88の一端部に接続されている。コンデンサ88の他端部は、電源59の負極に接続されている。これらコイル82及びコンデンサ88によって、ノイズフィルタが構成されている。
駆動回路基板33には、モータリレーとしてのリレー83が設けられている。リレー83は、直列回路80Uの後述する接続点84Uと電動モータ18のU相巻線85Uとの間、及び直列回路80Vの後述する接続点84Vと電動モータ18のV相巻線85Vとの間に介装されている。
スイッチ81がオンにされると、電源59と各直列回路80U,80V,80Wが接続される。
スイッチ81がオンにされると、電源59と各直列回路80U,80V,80Wが接続される。
直列回路80Uは、FETからなるスイッチング素子86U1,86U2が直列に接続されたものであり、一方のスイッチング素子86U1のドレインがコイル82に接続されている。同様に、直列回路80Vは、スイッチング素子86V1,86V2が直列に接続されたものであり、一方のスイッチング素子86V1のドレインがコイル82に接続されている。直列回路80Wは、スイッチング素子86W1,86W2が直列に接続されたものであり、一方のスイッチング素子86W1のドレインがコイル82に接続されている。
直列回路80Uは、これら2個のスイッチング素子86U1,86U2の接続点84Uで、電動モータ18のU相巻線85Uに接続されている。同様に、直列回路80Vは、これら2個のスイッチング素子86V1,86V2の接続点84Vで、電動モータ18のV相巻線85Vに接続されている。同様に、直列回路80Wは、これら2個のスイッチング素子86W1,86W2の接続点84Wで、電動モータ18のW相巻線85Wに接続されている。
各直列回路80U,80V,80Wの他方のスイッチング素子86U2,86V2,86W2のソースは、それぞれ、対応する抵抗87を介して、電源59に接続されている。
各スイッチング素子86U1~86W2のゲートはFETドライバ77に接続されている。
以上の概略構成を有する電動パワーステアリング装置1において、演算回路71は、トルクセンサ11及び車速センサ73の出力信号に基づいて、電動モータ18の各相巻線85U,85V,85Wに流れるべき電流の目標電流値を設定する。
各スイッチング素子86U1~86W2のゲートはFETドライバ77に接続されている。
以上の概略構成を有する電動パワーステアリング装置1において、演算回路71は、トルクセンサ11及び車速センサ73の出力信号に基づいて、電動モータ18の各相巻線85U,85V,85Wに流れるべき電流の目標電流値を設定する。
次いで、演算回路71は、各相目標電流値と各相巻線85U,85V,85Wに実際に流れている各相電流値との偏差に基づいて、電動モータ18の各相ごとにPWM(Pulse Width Modulation)信号を生成し、その各相PWM信号を、FETドライバ77を介して、各直列回路80U~80Wのスイッチング素子86U1~86W2に入力する。
これにより、各スイッチング素子86U1~86W2が、それらに入力されるPWM信号のデューティに応じてオン/オフする。その結果、操舵トルク及び車速に応じた電流が電動モータ18に流れ、操舵補助力が発生する。
これにより、各スイッチング素子86U1~86W2が、それらに入力されるPWM信号のデューティに応じてオン/オフする。その結果、操舵トルク及び車速に応じた電流が電動モータ18に流れ、操舵補助力が発生する。
このときの、演算回路71に流れる電流i1は、例えば、図4に示す経路をたどる。すなわち、電源59からの電流i1は、第1の層51のスルーホール581内の導体を通って、第2の層52の電源パターン56に流れる。さらに、電源パターン56を周方向C1に沿って流れ、スルーホール582内の導体から演算回路71に流れる。演算回路71から流れ出た電流i1は、スルーホール583内の導体を通って接地パターン57に流れる。さらに、接地パターン57において、周方向C1に沿って流れ、接地パターン57の一端57aから、スルーホール584内の導体及び車体61等を通って、電源59に流れる。
このとき、電源パターン56は有端環状をなしていることから、電源パターン56に流れる電流i1はループ状にならない。同様に、接地パターン57は有端環状をなしていることから、接地パターン57に流れる電流i1はループ状にならない。
以上説明したように、本実施の形態によれば、各回路基板31~33のそれぞれにおいて、電源パターン56が円弧状に形成され、切欠部56cが形成されていることにより、電源パターン56において、出力軸30の周囲を環状に流れるループ電流が生じることを防止できる。その結果、ループ電流の発生に起因する電磁ノイズを防止できる。
以上説明したように、本実施の形態によれば、各回路基板31~33のそれぞれにおいて、電源パターン56が円弧状に形成され、切欠部56cが形成されていることにより、電源パターン56において、出力軸30の周囲を環状に流れるループ電流が生じることを防止できる。その結果、ループ電流の発生に起因する電磁ノイズを防止できる。
また、各回路基板31~33のそれぞれにおいて、接地パターン57が円弧状に形成され、切欠部57cが形成されていることにより、接地パターン57において、出力軸30の周囲を環状に流れる電流としてのループ電流が生じることを防止できる。その結果、ループ電流の発生に起因する電磁ノイズをより確実に防止できる。
さらに、電動モータ18の出力軸30を、各回路基板31~33の貫通孔55内に配置でき、モータ制御装置29及び電動モータ18が占有するスペースをより少なくできる。
さらに、電動モータ18の出力軸30を、各回路基板31~33の貫通孔55内に配置でき、モータ制御装置29及び電動モータ18が占有するスペースをより少なくできる。
また、アナログ信号が入力される第1の多層回路基板31と、デジタル信号が入力される第2の多層回路基板32とを別体に形成していることにより、第2の多層回路基板32から第1の多層回路基板31に侵入してくるノイズを少なくでき、アナログ信号にノイズが入ることを抑制できる。
また、各回路基板31~33のそれぞれにおいて、第2の層52と第3の層53とを隣接配置していることにより、第2の層52と第3の層53との間にキャパシタを形成することができる。このキャパシタによって、第2の層52の電源パターン56で発生したノイズと、第3の層53の接地パターン57で発生したノイズとを相殺することができる。これにより、ノイズがモータ制御装置29に与える影響をより少なくできる。
また、各回路基板31~33のそれぞれにおいて、第2の層52と第3の層53とを隣接配置していることにより、第2の層52と第3の層53との間にキャパシタを形成することができる。このキャパシタによって、第2の層52の電源パターン56で発生したノイズと、第3の層53の接地パターン57で発生したノイズとを相殺することができる。これにより、ノイズがモータ制御装置29に与える影響をより少なくできる。
以上より、電磁ノイズの影響を受け難い電動パワーステアリング装置1を実現できる。
さらに、各回路基板31~33を、制御ハウジング34内で軸方向X1に近接して重ねて配置していることにより、各回路基板31~33が、小径にされて小型化を達成されつつ、十分な実装面積を確保できるようになっている。その結果、各回路基板31~33を収容している制御ハウジング34を小型にできる。
さらに、各回路基板31~33を、制御ハウジング34内で軸方向X1に近接して重ねて配置していることにより、各回路基板31~33が、小径にされて小型化を達成されつつ、十分な実装面積を確保できるようになっている。その結果、各回路基板31~33を収容している制御ハウジング34を小型にできる。
本発明は、以上の実施の形態の内容に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
例えば、各回路基板31~33のそれぞれの形状は、円環状に限らず、半円形形状や1/4円形形状や扇形形状等の円弧形状をなしていてもよい。また、第2の層(電源層)52と第3の層(接地層)53の配置を逆にしてもよい。
例えば、各回路基板31~33のそれぞれの形状は、円環状に限らず、半円形形状や1/4円形形状や扇形形状等の円弧形状をなしていてもよい。また、第2の層(電源層)52と第3の層(接地層)53の配置を逆にしてもよい。
例えば、上述の実施形態では、いわゆるコラムアシスト式の電動パワーステアリング装置に本発明が適用された例について説明したが、これに限らず、いわゆるピニオンアシスト式の電動パワーステアリング装置や、いわゆるラックアシスト式の電動パワーステアリング装置等、他の形式の電動パワーステアリング装置に、本発明を適用してもよい。
また、上述の実施形態では、電動モータの出力を操舵補助力として出力する電動パワーステアリング装置に本発明が適用された例について説明したが、これに限らず、操舵部材の操舵角に対する転舵輪の転舵角の比を変更可能な伝達比可変機構を備え、伝達比可変機構を駆動するために電動モータの出力を用いる伝達比可変式の車両用操舵装置や、操舵部材と転舵輪との機械的な連結が解除され、転舵輪を電動モータの出力で操向するステア・バイ・ワイヤ式の車両用操舵装置等に、本発明を適用してもよい。
また、上述の実施形態では、電動モータの出力を操舵補助力として出力する電動パワーステアリング装置に本発明が適用された例について説明したが、これに限らず、操舵部材の操舵角に対する転舵輪の転舵角の比を変更可能な伝達比可変機構を備え、伝達比可変機構を駆動するために電動モータの出力を用いる伝達比可変式の車両用操舵装置や、操舵部材と転舵輪との機械的な連結が解除され、転舵輪を電動モータの出力で操向するステア・バイ・ワイヤ式の車両用操舵装置等に、本発明を適用してもよい。
また、上述の実施形態では、電動モータ18として、ブラシレスモータを用いる例について説明したが、これに限らず、ブラシレスモータ以外のモータを、電動モータ18として用いてもよい。
なお、本発明のモータ制御装置を、伝達比可変機構を備える車両用操舵装置に用いる場合の伝達比可変機構は、例えば、遊星伝達機構やニューテーションギヤ機構等の差動機構を備えており、この差動機構を駆動する電動モータとしての伝達比可変用モータの制御装置として、本発明のモータ制御装置を用いることができる。
なお、本発明のモータ制御装置を、伝達比可変機構を備える車両用操舵装置に用いる場合の伝達比可変機構は、例えば、遊星伝達機構やニューテーションギヤ機構等の差動機構を備えており、この差動機構を駆動する電動モータとしての伝達比可変用モータの制御装置として、本発明のモータ制御装置を用いることができる。
その他、本発明を、電動モータ制御装置を備える他の一般の装置に適用してもよい。
Claims (8)
- 電動モータを駆動制御するための制御基板を備え、
前記制御基板は内層及び外層を有する多層回路基板を含み、
前記内層のうちの一層には、前記電動モータの出力軸の回りに配置された接地パターンが形成され、
前記接地パターンの一部には、前記接地パターンを出力軸の径方向に貫くようにして切欠部が形成されていることを特徴とするモータ制御装置。 - 前記内層のうちの他の一層は電源層であり、
前記電源層に、前記電動モータの出力軸の回りに配置された電源パターンが形成され、
前記電源パターンの一部には、前記電源パターンを出力軸の径方向に貫くようにして切欠部が形成されている請求項1記載のモータ制御装置。 - 前記電源パターンは、前記接地パターンに対向するように配置され、前記電源パターン及び前記接地パターンによってキャパシタを形成する請求項2記載のモータ制御装置。
- 前記接地パターンに形成された切欠部と、前記電源パターンに形成された切欠部とは、平面視してほぼ同一の位置に存在する請求項3記載のモータ制御装置。
- 前記内層及び外層を有する多層回路基板には、互いに離隔する第1及び第2の多層回路基板が含まれ、
前記第1の多層回路基板は、電源回路、演算回路及びアナログ信号用インターフェース回路を少なくとも実装し、前記第2の多層回路基板は、スイッチング素子を制御するドライバ及び外部との通信回路を少なくとも実装する請求項1記載のモータ制御装置。 - 前記内層及び外層を有する多層回路基板には、互いに離隔する第1及び第2の多層回路基板が含まれ、
前記第1の多層回路基板は、電源回路、演算回路及びアナログ信号用インターフェース回路を少なくとも実装し、前記第2の多層回路基板は、スイッチング素子を制御するドライバ及び外部との通信回路を少なくとも実装する請求項2記載のモータ制御装置。 - 請求項1に記載のモータ制御装置を備えることを特徴とする車両用操舵装置。
- 請求項2に記載のモータ制御装置を備えることを特徴とする車両用操舵装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09707957.8A EP2244359B1 (en) | 2008-02-07 | 2009-02-02 | Motor control device and vehicle steering device with the same |
| US12/735,654 US8681506B2 (en) | 2008-02-07 | 2009-02-02 | Motor control device and vehicle steering system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008028198A JP5252939B2 (ja) | 2008-02-07 | 2008-02-07 | モータ制御装置およびこれを備える車両用操舵装置 |
| JP2008-028198 | 2008-02-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2009099026A1 true WO2009099026A1 (ja) | 2009-08-13 |
Family
ID=40952101
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2009/051699 WO2009099026A1 (ja) | 2008-02-07 | 2009-02-02 | モータ制御装置及びこれを備える車両用操舵装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8681506B2 (ja) |
| EP (1) | EP2244359B1 (ja) |
| JP (1) | JP5252939B2 (ja) |
| WO (1) | WO2009099026A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018078719A1 (ja) * | 2016-10-25 | 2018-05-03 | 三菱電機株式会社 | 電力制御装置、電動機、空気調和機、および電動機の製造方法 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5574172B2 (ja) * | 2010-07-14 | 2014-08-20 | 株式会社ジェイテクト | 制御装置 |
| DE102010049524B4 (de) * | 2010-10-25 | 2016-07-14 | Maxon Motor Ag | Gleichstromelektromotor mit flexiblem Rotoraufbau sowie Verfahren zu dessen Herstellung |
| CN103502081B (zh) * | 2011-05-11 | 2016-02-10 | 三菱电机株式会社 | 电动动力转向装置 |
| DE102011084505A1 (de) * | 2011-06-10 | 2012-12-13 | Robert Bosch Gmbh | Lenksystem in einem Fahrzeug |
| JP6364704B2 (ja) * | 2013-04-30 | 2018-08-01 | 株式会社明電舎 | 車載用電力変換装置 |
| KR101518939B1 (ko) * | 2013-12-23 | 2015-05-11 | 현대자동차 주식회사 | 차량용 전원판 및 접지판 장치 |
| US9231503B2 (en) | 2014-05-28 | 2016-01-05 | Google Inc. | Methods and apparatuses for selectively controlling motor power boards |
| US10523091B2 (en) | 2014-11-13 | 2019-12-31 | Mitsubishi Electric Corporation | Control unit and electric power steering device employing control unit |
| DE102015222266A1 (de) | 2015-11-11 | 2017-05-11 | Robert Bosch Automotive Steering Gmbh | Elektromechanischer Stellantrieb mit redundantem elektronischen Teilsystem |
| CN106230344B (zh) * | 2016-08-31 | 2018-12-14 | 南京溧水电子研究所有限公司 | 电动车用大功率一体化电机控制器 |
| DE102019203160A1 (de) * | 2019-03-08 | 2020-09-10 | Thyssenkrupp Ag | Steuergerät für ein Lenksystem eines Kraftfahrzeugs, elektromechanische Kraftfahrzeugservolenkung und Steer-by-Wire Lenksystem |
| CN113844532A (zh) * | 2021-10-25 | 2021-12-28 | 北京经纬恒润科技股份有限公司 | 冗余电动助力转向装置 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004032900A (ja) * | 2002-06-25 | 2004-01-29 | Canon Electronics Inc | 電磁回転機 |
| JP2004182079A (ja) * | 2002-12-03 | 2004-07-02 | Denso Corp | 電動パワーステアリング装置 |
| JP2004282990A (ja) * | 2003-02-27 | 2004-10-07 | Asmo Co Ltd | アウタロータ型モータ及びその製造方法 |
| JP2005278344A (ja) | 2004-03-25 | 2005-10-06 | Denso Corp | モータ制御装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6121861A (ja) * | 1984-03-23 | 1986-01-30 | Aisin Seiki Co Ltd | 電気式パワ−ステアリング装置 |
| JPH07322568A (ja) * | 1994-05-20 | 1995-12-08 | Jidosha Denki Kogyo Co Ltd | モータ |
| GB9720954D0 (en) * | 1997-10-02 | 1997-12-03 | Scient Generics Ltd | Commutators for motors |
| JP2002044989A (ja) * | 2000-07-19 | 2002-02-08 | Koyo Seiko Co Ltd | 電動パワーステアリング装置のための電子制御装置 |
| JP3774624B2 (ja) * | 2000-10-18 | 2006-05-17 | 三菱電機株式会社 | 電動パワーステアリング装置 |
| DE10112895B4 (de) * | 2001-03-15 | 2011-09-29 | Ltn Servotechnik Gmbh | Schleifringeinheit mit einer Leiterplatte |
| JP3614380B2 (ja) | 2001-05-17 | 2005-01-26 | 三菱電機株式会社 | 電動式パワーステアリング装置 |
| JP4219634B2 (ja) * | 2002-08-01 | 2009-02-04 | 凌和電子株式会社 | 磁気センサ、側面開放型temセル、およびこれらを利用した装置 |
| US6747448B2 (en) * | 2002-08-14 | 2004-06-08 | Honeywell International Inc. | Rotary position sensor methods and systems |
| US6909212B2 (en) * | 2003-02-27 | 2005-06-21 | Asmo Co., Ltd. | Motor having rotation sensor and manufacturing method thereof |
| US7196527B2 (en) * | 2004-02-17 | 2007-03-27 | Stridsberg Innovation Ab | Redundant compact encoders |
| JP2006013373A (ja) * | 2004-06-29 | 2006-01-12 | Koyo Seiko Co Ltd | 多層回路基板およびトルク検出装置 |
-
2008
- 2008-02-07 JP JP2008028198A patent/JP5252939B2/ja not_active Expired - Fee Related
-
2009
- 2009-02-02 EP EP09707957.8A patent/EP2244359B1/en not_active Not-in-force
- 2009-02-02 US US12/735,654 patent/US8681506B2/en not_active Expired - Fee Related
- 2009-02-02 WO PCT/JP2009/051699 patent/WO2009099026A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004032900A (ja) * | 2002-06-25 | 2004-01-29 | Canon Electronics Inc | 電磁回転機 |
| JP2004182079A (ja) * | 2002-12-03 | 2004-07-02 | Denso Corp | 電動パワーステアリング装置 |
| JP2004282990A (ja) * | 2003-02-27 | 2004-10-07 | Asmo Co Ltd | アウタロータ型モータ及びその製造方法 |
| JP2005278344A (ja) | 2004-03-25 | 2005-10-06 | Denso Corp | モータ制御装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP2244359A4 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018078719A1 (ja) * | 2016-10-25 | 2018-05-03 | 三菱電機株式会社 | 電力制御装置、電動機、空気調和機、および電動機の製造方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20100319976A1 (en) | 2010-12-23 |
| JP5252939B2 (ja) | 2013-07-31 |
| JP2009189187A (ja) | 2009-08-20 |
| EP2244359A1 (en) | 2010-10-27 |
| US8681506B2 (en) | 2014-03-25 |
| EP2244359A4 (en) | 2012-12-05 |
| EP2244359B1 (en) | 2015-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2009099026A1 (ja) | モータ制御装置及びこれを備える車両用操舵装置 | |
| JP5397658B2 (ja) | 車両用操舵装置及びそのサブアセンブリの移送方法 | |
| JP5316839B2 (ja) | モータおよびこれを備える車両用操舵装置 | |
| JP5071728B2 (ja) | モータ制御装置およびこれを備える車両用操舵装置 | |
| JP5311103B2 (ja) | 車両用操舵装置 | |
| JP2012006419A (ja) | 車両用操舵装置 | |
| JP5397657B2 (ja) | 車両用操舵装置 | |
| JP5397654B2 (ja) | 車両用操舵装置 | |
| JP2009190479A (ja) | 車両用操舵装置 | |
| JP2012010465A (ja) | モータ制御装置及び車両用操舵装置 | |
| JP5234331B2 (ja) | 車両用操舵装置 | |
| JP5505712B2 (ja) | 制御装置およびこれを備える電動パワーステアリング装置 | |
| JP5299665B2 (ja) | 車両用操舵装置 | |
| JP2011228453A (ja) | 多層回路基板、モータ制御装置及び車両用操舵装置 | |
| JP2009188123A (ja) | モータ制御装置およびこれを備える車両用操舵装置 | |
| WO2018150974A1 (ja) | ブラシレスモータ | |
| JP5970923B2 (ja) | 電動パワーステアリング装置 | |
| JP5397659B2 (ja) | 車両用操舵装置 | |
| JP5403882B2 (ja) | モータ制御装置 | |
| US20220340196A1 (en) | Steering device | |
| CN113471730B (zh) | 具有灵活电连接器位置的动力机组 | |
| JP2009190477A (ja) | 車両用操舵装置 | |
| WO2022196456A1 (ja) | 駆動装置 | |
| JP7172849B2 (ja) | 電力変換装置 | |
| JP5299664B2 (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 09707957 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 12735654 Country of ref document: US |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2009707957 Country of ref document: EP |