RU2553674C2 - Тормоз для универсального электродвигателя - Google Patents
Тормоз для универсального электродвигателя Download PDFInfo
- Publication number
- RU2553674C2 RU2553674C2 RU2012131272/07A RU2012131272A RU2553674C2 RU 2553674 C2 RU2553674 C2 RU 2553674C2 RU 2012131272/07 A RU2012131272/07 A RU 2012131272/07A RU 2012131272 A RU2012131272 A RU 2012131272A RU 2553674 C2 RU2553674 C2 RU 2553674C2
- Authority
- RU
- Russia
- Prior art keywords
- key
- braking mode
- braking
- motor
- mode
- Prior art date
Links
Images

Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P3/00—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters
- H02P3/06—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters for stopping or slowing an individual dynamo-electric motor or dynamo-electric converter
- H02P3/18—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters for stopping or slowing an individual dynamo-electric motor or dynamo-electric converter for stopping or slowing an ac motor
- H02P3/22—Arrangements for stopping or slowing electric motors, generators, or dynamo-electric converters for stopping or slowing an individual dynamo-electric motor or dynamo-electric converter for stopping or slowing an ac motor by short-circuit or resistive braking
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/10—Commutator motors, e.g. repulsion motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P25/00—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details
- H02P25/02—Arrangements or methods for the control of AC motors characterised by the kind of AC motor or by structural details characterised by the kind of motor
- H02P25/10—Commutator motors, e.g. repulsion motors
- H02P25/14—Universal motors
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Stopping Of Electric Motors (AREA)
- Control Of Direct Current Motors (AREA)
- Braking Systems And Boosters (AREA)
Abstract
Изобретение относитя к области электротехники и может быть использовано в электрической ручной машине, оснащенной опасным инструментом. Технический результат - обеспечение эффективного торможения с меньшим искрением под щетками и малым их износосм. В электродинамическом тормозе для универсального электродвигателя обмотка возбуждения при работе в режиме торможения запитывается из сети, а якорь непосредственно замкнут накоротко. Процесс торможения выполняется под управлением управляющей электроники, благодаря чему достигается эффективное торможение при сравнительно малом износе щеток. 2 н. и 13 з.п. ф-лы, 6 ил.
Description
Настоящее изобретение относится к тормозу для универсального электродвигателя согласно п.1 формулы изобретения и к способу торможения согласно п.13 формулы изобретения.
Электродинамические тормоза известны в самых разнообразных вариантах их исполнения.
В US 6236177 B1 описана схема торможения и управления для универсального электродвигателя, в которой, с одной стороны, последовательно с электродвигателем включено первое переключательное средство (или первый ключ) (симистор) для приведения электродвигателя в действие, а с другой стороны, параллельно якорю включено второе переключательное средство (или второй ключ) (симистор) для торможения электродвигателя, при этом якорь расположен между частями обмотки возбуждения. В двигательном режиме второе переключательное средство, включенное параллельно якорю, находится в непроводящем состоянии, а при работе в режиме торможения первое и второе переключательные средства находятся в проводящем состоянии.
В ЕР 0578366 A2 описан тормоз для универсальных электродвигателей, в котором для соединения обмотки возбуждения и роторной обмотки с сетью и/или их отсоединения от сети используются переключательные средства, которые могут устанавливаться (переключаться) в различные положения, в первом из которых роторная обмотка и обмотка возбуждения соединены с сетью и во втором из которых роторная обмотка замкнута накоротко, а с сетью соединена только обмотка возбуждения.
В DE 10317636 A1 описан тормоз для универсального электродвигателя, имеющий короткозамыкатель (симистор), предназначенный для замыкания накоротко обмотки якоря при работе в режиме торможения и имеющий для определения своего коммутационного положения управляющий вход, который соединен с блоком управления в целях импульсно-фазового управления этим короткозамыкателем при работе в режиме торможения во избежание искрения под щетками.
В основу настоящего изобретения была положена задача разработать эффективный и недорогой электродинамический тормоз для универсального электродвигателя, каковой тормоз позволял бы добиться эффективного торможения при предпочтительно меньшем искрении под щетками и при предпочтительно малом их износе, а также разработать соответствующий способ торможения универсального электродвигателя.
Указанная задача решается с помощью объектов, заявленных в пп.1 и 13 формулы изобретения. Различные возможные варианты осуществления изобретения представлены в соответствующих зависимых пунктах формулы изобретения и более детально рассмотрены в последующем описании.
Преимущество изобретения состоит в том, что предусмотрен электродинамический тормоз для универсального электродвигателя с устройством для переключения с работы в двигательном режиме на работу в режиме торможения, при работе в котором обмотка возбуждения универсального электродвигателя запитана от сети через первый и второй ключи, а якорь универсального электродвигателя замкнут накоротко через второй ключ, и с управляющей электроникой, которая при работе в режиме торможения обеспечивает предпочтительно в течение каждой полуволны сетевого напряжения кратковременную активизацию двигательного режима, а затем активизацию режима торможения, для чего второй ключ переводится в проводящее состояние по истечении заданной временной задержки после перевода первого ключа в проводящее состояние. Таким путем удается повысить эффективность торможения универсального электродвигателя.
В одном из вариантов временная задержка в переводе второго ключа в проводящее состояние имеет такую продолжительность, что предшествующий двигательный режим в течение полуволны сетевого напряжения приводит к уменьшению искрения под щетками на коллекторе универсального двигателя.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка составляет от 1 мкс до 1 мс. Подобный интервал значений временной задержки зарекомендовал себя как предпочтительный. Однако в зависимости от конкретной реализации возможно использование временной задержки меньшей или большей продолжительности.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка в переводе второго ключа в проводящее состояние после перевода первого ключа в проводящее состояние постоянна на протяжении всего процесса торможения.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка в переводе второго ключа в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения зависит от параметров универсального электродвигателя и от сетевого напряжения. Благодаря этому удается достичь большей точности в согласовании процесса торможения с фактическими условиями. При этом прежде всего удается оптимизировать время торможения и нагрузку на коллектор, в первую очередь на щетки.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка в переводе второго ключа в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения зависит от сетевого напряжения в момент перевода первого ключа в проводящее состояние и/или от частоты вращения вала универсального электродвигателя и/или от его температуры. Данный вариант позволяет дополнительно улучшить согласование процесса торможения с фактическими условиями, например, в целях оптимизации времени торможения и/или снижения нагрузки на коллектор, прежде всего на щетки.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка в переводе второго ключа в проводящее состояние имеет в начале работы в режиме торможения некоторое значение, которое уменьшается в ходе дальнейшей работы в режиме торможения и прежде всего в конце работы в режиме торможения становится равным нулю или прежде всего становится отрицательным, в соответствии с чем перевод второго ключа в проводящее состояние начинает предшествовать переводу первого ключа в проводящее состояние.
В еще одном варианте выполнения предлагаемого в изобретении тормоза временная задержка в переводе второго ключа в проводящее состояние имеет такую продолжительность, что коммутация тока под щетками на коллекторе универсального электродвигателя при инициировании режима торможения в течение по меньшей мере части полуволн перемещается со сбегающего края щеток на их набегающий край, а якорь при работе в режиме торможения по существу не приводится в действие (во вращение), т.е. не ускоряется.
В еще одном варианте выполнения предлагаемого в изобретении тормоза управляющая электроника выполнена с возможностью обеспечения работы в регулируемом и нерегулируемом режиме торможения.
В еще одном варианте выполнения предлагаемого в изобретении тормоза управляющая электроника выполнена с возможностью обращения к таблице, в которой сохранены значения фазовых углов для перевода первого ключа и/или второго ключа в проводящее состояние, при этом предпочтительно сохранена по меньшей мере одна кривая фазовых углов.
В еще одном варианте выполнения предлагаемого в изобретении тормоза при работе в режиме торможения второй ключ включен параллельно якорю и последовательно с обмоткой возбуждения и первым ключом, при этом в предпочтительном варианте перед вторым ключом в цепь включен переключатель предпочтительно с распознающим контактом.
В еще одном варианте выполнения предлагаемого в изобретении тормоза переключатель функционально связан в качестве коммутирующего элемента датчика сигналов с управляющей электроникой, в линии, ведущей к первому выводу для подключения к сети, расположен первый ключ, а в линии, ведущей ко второму выводу для подключения к сети, расположен третий ключ.
Объектом изобретения является далее способ торможения универсального электродвигателя с использованием устройства для переключения универсального электродвигателя с работы в двигательном режиме на работу в режиме торможения, заключающийся в том, что при работе в режиме торможения обмотку возбуждения универсального электродвигателя запитывают сетевым напряжением через первый и второй ключи, а якорь универсального электродвигателя замыкают накоротко через второй ключ, при этом при работе в режиме торможения предпочтительно в течение каждой полуволны сетевого напряжения кратковременно активизируют двигательный режим работы универсального электродвигателя путем перевода первого ключа в проводящее состояние, а затем по истечении заданной временной задержки активизируют (собственно) режим торможения путем перевода второго ключа в проводящее состояние.
В одном из вариантов осуществления предлагаемого в изобретении способа временную задержку между моментом перевода первого ключа в проводящее состояние для активизации двигательного режима и моментом перевода второго ключа в проводящее состояние для активизации режима торможения задают в пределах от 1 мкс до 1 мс. Подобный интервал значений временной задержки зарекомендовал себя как предпочтительный. Однако в зависимости от конкретной реализации возможно использование временной задержки меньшей или большей продолжительности.
В еще одном варианте осуществления предлагаемого в изобретении способа временную задержку в переводе второго ключа в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения ставят в зависимость от сетевого напряжения в момент перевода первого ключа в проводящее состояние и/или от частоты вращения вала универсального электродвигателя и/или от его температуры.
Другие преимущества изобретения состоят в том, что без перемены полярности обмотки возбуждения или якоря достигается плавное и быстрое торможение универсального электродвигателя при длительном сроке службы щеток. Якорь при работе в режиме торможения замкнут накоротко, а обмотка возбуждения путем специального управления при работе в режиме торможения возбуждается сетевым напряжением. Плавное и быстрое торможение достигается преимущественно благодаря использованию простого аппаратного обеспечения и специального программного обеспечения, чем обусловлена низкая стоимость электродинамического тормоза.
Искрение на коллекторе якоря преимущественно при работе в режиме торможения удается уменьшить прежде всего благодаря тому, что в контроллер управляющей электроники заложена программа, ограничивающая вредное повышенное искрение на коллекторе, и в первую очередь подавить благодаря тому, что в течение одной полуволны сетевого напряжения сначала происходит работа в двигательном режиме, а затем в режиме торможения.
Помимо этого в предпочтительном варианте предусмотрены устройства для надежного распознавания двигательного режима и режима торможения, а также для контроля эксплуатационной надежности управляющей электроники и электрической схемы.
Ниже изобретение более подробно рассмотрено со ссылкой на прилагаемые к описанию чертежи, на которых показано:
на фиг.1 и 2 - электрические схемы электродинамического тормоза для универсального электродвигателя и
на фиг.3-5 - сигналограммы в виде характеристик изменения тока при работе в двигательном режиме и в режиме торможения и
на фиг.6 - схема, иллюстрирующая работу в режиме торможения в течение полуволны сетевого напряжения.
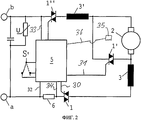
На фиг.1 показана электрическая схема, в которой в линии, ведущей к первому выводу а для подключения к сети, расположен первый симистор 1, включенный последовательно с универсальным электродвигателем, а параллельно якорю 2 включен второй симистор 1', перед которым последовательно с ним включен переключатель S. Якорь 2 включен между двумя обмотками 3, 3' возбуждения. Переключатель S подсоединен к одной из сторон якоря 2. Второй симистор 1' с одной своей стороны подсоединен к обеспечивающему работу в режиме торможения контакту е переключателя S, а с другой своей стороны - к другой из сторон якоря. Распознающий контакт f переключателя S соединен линией 4 с управляющей электроникой 5. Управляющая электроника 5 соединена первой управляющей линией 30 с первым симистором 1, а второй управляющей линией 31 - со вторым симистором 1'. Управляющая электроника 5 соединена далее первой питающей линией 32 с первым выводом а для подключения к сети, а второй питающей линией 33 - со вторым выводом b для подключения к сети. Кроме того, от управляющей электроники 5 к соединительной линии между шунтом 6 и первым симистором 1 проходит сигнальная линия 34. Помимо этого могут быть предусмотрены дополнительные датчики 35, прежде всего тахометр или датчик температуры универсального электродвигателя 1, которые соединены еще одной сигнальной линией 36 с управляющей электроникой 5.
При работе в двигательном режиме переключатель S замкнут на распознающий контакт f, и поэтому работа в двигательном режиме происходит через первый симистор 1. При работе же в режиме торможения переключатель S замкнут на обеспечивающий работу в этом режиме торможения контакт е, и поэтому работа в режиме торможения происходит одновременно через первый симистор 1 и второй симистор 1'.
От применения переключателя S можно отказаться. Помимо этого с управляющей электроникой 5 может быть соединен коммутирующий элемент датчика сигналов. В данном варианте второй симистор 1' соединен с двумя выводами якоря 2. Такой переключатель датчика сигналов, предназначенный для надежного распознавания двигательного режима и режима торможения, предпочтительно имеет три вывода.
Для повышения эффективности процесса торможения и прежде всего для снижения искрения под щетками при работе в режиме торможения первым и вторым симисторами 1, 1' в особенности управляет программа, которая заложена в контроллер управляющей электроники 5 и которая составлена таким образом, что предпочтительно в течение каждой полуволны сетевого напряжения сначала отпирается, т.е. переводится в проводящее состояние, первый симистор 1, чем активизируется работа в двигательном режиме. Несмотря на использование в данном случае термина "двигательный режим", поскольку соответственно выбрана подача напряжения, тем не менее при этом предпочтительно сетевое напряжение выбрано таким и прежде всего длительность его подачи выбрана настолько короткой, что не происходит никакого существенного, а предпочтительно вовсе никакого ускорения универсального электродвигателя. Благодаря этому при заданном положении щеток достигается оптимальная коммутация. Далее с заданной временной задержкой отпирается, т.е. переводится в проводящее состояние, второй симистор 1', в результате чего оба - первый 1 и второй 1' - симисторы находятся в проводящем состоянии. Вследствие этого якорь 2 оказывается замкнут накоротко через симистор 1', а ток сети протекает непосредственно через обмотку 3, 3' возбуждения и через первый и второй симисторы 1, 1'. Индуктированный ток в цепи короткозамкнутого якоря 2 протекает также через второй симистор 1'. В связи с изменением полярности поля на якоре при работе в режиме торможения по причине заданного положения щеток происходит недостаточная коммутация на якоре.
Поскольку предпочтительно в течение каждой полуволны при работе в режиме торможения перед фактическим режимом торможения кратковременно активизируется двигательный режим, искрение под щетками при короткозамкнутом якоре подавляется, благодаря чему уменьшается искрение на коллекторе, а тем самым и снижается износ щеток.
Временная задержка в отпирании второго симистора 1' имеет такую продолжительность, что работа в двигательном режиме предпочтительно в течение каждой полуволны при работе в режиме торможения достаточна для подавления искрения под щетками на коллекторе универсального электродвигателя, но не достаточна для сколько-нибудь существенного приведения в действие якоря 2.
Временная задержка в отпирании второго симистора 1' в течение каждой полуволны в предпочтительном варианте постоянна на протяжении всего времени торможения, т.е. в процессе торможения универсального электродвигателя 1. Однако указанная временная задержка может также иметь переменную величину, т.е. может изменяться при работе в режиме торможения. В начале работы в режиме торможения временная задержка может соответственно иметь большую величину, а затем в ходе дальнейшей работы в режиме торможения сокращаться, предпочтительно непрерывно, например, от одной полуволны к другой и достигать в конце времени торможения величины, при которой второй симистор 1' отпирается непосредственно после отпирания первого симистора 1 или одновременно с ним либо даже раньше него.
Универсальный электродвигатель может быть также выполнен отсоединяемым от сети с обеих своих сторон.
На фиг.2 показан вариант, в котором в линии, ведущей ко второму выводу b для подключения к сети, расположен третий симистор 1''. Первый и третий симисторы 1,1'' всегда отпираются одновременно. В данном случае с управляющей электроникой 5 функционально связан сигнальный ключ S' для распознавания двигательного режима и режима торможения.
Второй симистор 1', который включен параллельно якорю 2, может контролироваться шунтом 6. В том случае, когда после включения универсального электродвигателя обнаруживается протекание тока слишком большой силы, второй симистор 1' предположительно находится в проводящем состоянии, и универсальный электродвигатель сразу же отсоединяется от сети. В подобном случае может подаваться предупредительный мигающий световой сигнал.
В описанных выше вариантах симисторы использовались в качестве полупроводниковых ключей. В зависимости от выбранного варианта возможно использование и иных ключей, прежде всего полупроводниковых ключей, для управления подачей напряжения и тока на универсальный электродвигатель в целях обеспечения его работы в двигательном режиме и в режиме торможения.
Описанный выше электродинамический тормоз отличается прежде всего хорошей коммутацией тока под щетками на коллекторе универсального электродвигателя при работе в режиме торможения. Такое особое преимущество достигается благодаря тому, что включенный параллельно якорю 2 симистор 1' отпирается с особой временной задержкой относительно первого симистора 1, включенного последовательно с универсальным электродвигателем.
Описанный выше способ более подробно рассмотрен ниже со ссылкой на фиг.3-5, при этом в предпочтительном варианте при работе в режиме торможения для управления симисторами 1,1' всегда используется одна и та же таблица заложенной в контроллер программы для кривой фазовых углов.
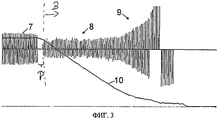
На фиг.3 показана сигналограмма, отражающая характеристику изменения тока при работе в режиме торможения. Работа универсального электродвигателя в режиме холостого хода обозначена полными волнами 7 с фазовой отсечкой и с частотой, равной сетевой частоте. После короткой паузы Р сразу начинается работа в режиме торможения В, при этом первый и второй симисторы 1,1' одновременно отперты по команде программы, заложенной в контроллер управляющей электроники 5. В течение первых двух третей 8 времени торможения потребление тока обмоткой 3 возбуждения остается приблизительно одинаковым. По этой причине в начале работы в режиме торможения происходит интенсивное искрение под щетками, из-за чего щетки обгорают, а коллектор повреждается. В течение последней трети 9 времени торможения потребление тока обмоткой возбуждения незначительно возрастает.
Форма линии, которой на чертеже обозначена кривая 10 изменения частоты вращения (или скоростная характеристика), свидетельствует о том, что в начале работы в режиме торможения оно является слишком резким, а в конце - слишком слабым.
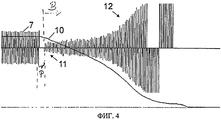
На фиг.4 показана сигналограмма, отражающая характеристику изменения тока при работе в режиме торможения В, в котором отпирание второго симистора 1' произошло с соответствующей временной задержкой после отпирания первого симистора 1, благодаря чему предпочтительно в течение каждой полуволны сетевого тока сначала происходит работа в двигательном режиме, а затем - в режиме торможения.
В начале 11 времени торможения потребление тока обмоткой 3 возбуждения существенно ниже по сравнению с фиг.3 и в дальнейшем слегка возрастает, а в последней трети 12 времени торможения значительно возрастает.
Благодаря временной задержке в отпирании второго симистора 1' коммутация на коллекторе универсального электродвигателя явно улучшается, а обгорание щеток уже значительно уменьшается. Форма кривой 10 изменения частоты вращения свидетельствует о том, что в начале работы в режиме торможения оно слабее, а затем усиливается.
На фиг.5 показана сигналограмма, отражающая характеристику изменения тока при работе в режиме торможения, в котором отпирание второго симистора 1' произошло с оптимальной временной задержкой после отпирания первого симистора 1, благодаря чему предпочтительно в течение каждой полуволны сетевого тока сначала происходит достаточная для обеспечения хорошей коммутации тока под щетками работа в двигательном режиме, а затем происходит работа в режиме торможения, при этом продолжительность такой временной задержки выбрана такой, что коммутация тока под щетками при переходе с работы в двигательном режиме на работу в режиме торможения перемещается со сбегающего края щеток на их набегающий край, благодаря чему значительно уменьшается искрение под щетками, а также выбрана такой, что при работе в режиме торможения якорь в принципе не приводится в действие.
Согласно фиг.5 в начале 13 времени торможения потребление тока обмоткой 3 возбуждения еще ниже, чем на фиг.4, и в дальнейшем непрерывно умеренно возрастает, а в последней трети 14 времени торможения для ускорения процесса торможения соответственно возрастает до высокого уровня. В конце времени торможения на обмотку возбуждения подаются пакеты 15 полуволн.
Форма кривой 10 изменения частоты вращения свидетельствует о достижении оптимальной тормозной характеристики. В начале работы в режиме торможения оно начинается плавно и далее непрерывно сверхпропорционально усиливается, а в конце работы в режиме торможения вновь становится плавным.
Благодаря временной задержке в отпирании второго симистора 1' можно использовать нерегулируемый режим торможения. Поэтому следует применять неизменную кривую фазовых углов, задаваемую таблицей, содержащейся в программе, заложенной в контроллер, поскольку при регулируемом режиме торможения изменение тормозного тока могло бы носить неспокойный характер, а искрение под щетками могло бы по этой причине усиливаться.
Для возможности поддержания скачков тока при работе в режиме торможения на низком уровне и уменьшения тем самым искрения под щетками шаг изменения фазового угла, например, от одной полуволны к другой в предпочтительном варианте может составлять менее 1%.
По мере укорачивания щеток их давление на коллектор на заданное время торможения может оказаться уже недостаточным из-за уже недостаточного для этого напряжения короткозамкнутого якоря.
С целью вновь обеспечить возможность соблюдения времени торможения программа, заложенная в контроллер управляющей электроники 5, переключается на еще одну таблицу для кривой фазовых углов с меньшей фазовой отсечкой полуволн переменного напряжения сети.
Достижение достаточного тормозного эффекта можно определять либо с помощью шунта, либо путем измерения частоты вращения.
Электродинамический тормоз в другом варианте может также работать на постоянном токе.
Программа, заложенная в контроллер управляющей электроники, в предпочтительном варианте содержит другие таблицы для кривых фазовых углов с уменьшающейся от одной таблицы к другой фазовой отсечкой полуволн сетевого напряжения.
Помимо этого тормозная характеристика в предпочтительном варианте рассчитана таким образом, что в начале работы в режиме торможения оно начинается плавно и далее непрерывно сверхпропорционально усиливается, а в конце работы в режиме торможения вновь становится плавным.
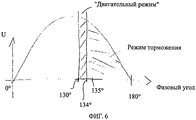
На фиг.6 схематично показана полуволна сетевого напряжения в функции фазового угла сетевого напряжения на выводах a, b для подключения к сети при работе универсального электродвигателя в режиме торможения. Основная идея изобретения заключается в том, чтобы обеспечивать щадящее торможение универсального электродвигателя с помощью сетевого напряжения. При этом при работе в режиме торможения сначала кратковременно включается двигательный режим, а затем происходит переключение на собственно режим торможения. В рассматриваемом примере при фазовом угле, равном 130°, первый ключ 1 (или коммутационный аппарат) переходит в проводящее (открытое) состояние, а второй ключ 1' все еще остается в непроводящем (закрытом) состоянии. Затем при следующем фазовом угле, равном 134°, второй ключ 1' также переходит в проводящее состояние, в результате чего на универсальный электродвигатель оказывается фактическое тормозное действие. В промежутке времени между фазовыми углами 130° и 134° кратковременно включается двигательный режим. После фазового угла, равного 134°, происходит работа только в режиме торможения, который заканчивается, например, при фазовом угле, равном 180°.
В зависимости от выбранного варианта фазовый угол включения, а тем самым и момент включения первого ключа с его переходом в проводящее состояние в процессе торможения варьируется в зависимости от различных параметров, таких, например, как частота вращения вала универсального электродвигателя, его температура, требуемая продолжительность торможения и/или требуемое продление срока эксплуатации щеток коллектора (степень их "щажения"). Помимо этого варьируется и временная задержка между моментом включения первого ключа, т.е. моментом его перехода в проводящее состояние, для кратковременного инициирования двигательного режима и моментом включения второго ключа, т.е. моментом его перехода в проводящее состояние, для инициирования режима торможения.
Временная задержка между моментами включения первого и второго ключей может, например, составлять от одной микросекунды до одной миллисекунды. Так, например, такая временная задержка может составлять либо от 1 до 5 мкс, либо от 5 до 20 мкс, либо от 20 до 50 мкс, либо от 50 до 100 мкс. Помимо этого такая временная задержка может составлять от 100 до 300 мкс. В зависимости от варианта можно использовать временную задержку меньшей или большей продолжительности.
В простом варианте временная задержка между моментами отпирания первого и второго ключей для кратковременной активизации двигательного режима и последующей активизации режима торможения может быть постоянной на протяжении всего процесса торможения.
В другом варианте временная задержка между моментом включения первого ключа для кратковременной активизации двигательного режима и моментом включения второго ключа для активизации режима торможения может в процессе торможения зависеть от тех или иных параметров универсального электродвигателя, например, его температуры, частоты вращения, электрических свойств, таких как сопротивление R и индуктивность L, и от сетевого напряжения.
Так, например, временная задержка может зависеть от сетевого напряжения в момент включения первого ключа и/или от частоты вращения вала универсального электродвигателя и/или от его температуры. Для этого в предпочтительном варианте в памяти данных сохранены полученные экспериментальным путем таблицы или параметрические кривые, к которым обращается управляющая электроника.
Температуру универсального электродвигателя и частоту вращения его вала можно определять соответствующими датчиками 35 либо оценивать, соответственно вычислять на основании рабочих параметров, таких, например, как ток и напряжение.
В зависимости от выбранного варианта универсальный электродвигатель можно в течение каждой полуволны сетевого напряжения переводить на работу в режиме торможения с кратковременной предшествующей ему работой в двигательном режиме, как это рассмотрено выше со ссылкой на фиг.6. В зависимости от выбранного варианта работа в двигательном режиме может при этом осуществляться перед переключением на работу в фактическом режиме торможения, например только в течение части полуволн.
Управляющая электроника выполнена в виде контроллера с соответствующим программным обеспечением для управления первым и вторым ключами. Для этого предусмотрена далее память, в которой хранятся управляющая программа и управляющая информация, например таблицы фазовой отсечки ключей, т.е. значения фазовых углов включения и выключения первого ключа и включения и выключения второго ключа, соответствующие режиму торможения, проиллюстрированному на фиг.6. В такой памяти сохранены прежде всего таблицы и параметрические кривые для фазовых углов, при которых должно происходить включение, соответственно выключение первого ключа и/или второго ключа. Такие таблицы и параметрические кривые могут при этом зависеть от параметров универсального электродвигателя и/или от сетевого напряжения. Временная задержка в отпирании второго ключа после отпирания первого ключа при работе в режиме торможения может прежде всего зависеть от сетевого напряжения в момент включения первого ключа и/или от частоты вращения вала универсального электродвигателя и/или от его температуры. Для этого в памяти сохранены соответствующие таблицы и/или параметрические кривые, которые были получены, например, экспериментальным путем.
Помимо этого в памяти можно сохранять данные, которые задают изменение фазового угла от одной полуволны к другой. Так, например, изменение фазового угла от одной полуволны к следующей для перехода первого ключа в проводящее состояние и/или для перехода второго ключа в проводящее состояние может быть ограничено максимальным значением, например, в один процент.
Из приведенных на фиг.3-5 диаграмм вытекает, что в конце работы в режиме торможения последовательно следуют пакеты полуволн напряжения разной полярности. В соответствии с этим для заданных временных интервалов или заданного количества полуволн используются, например, только положительные полуволны сетевого напряжения в целях торможения электродвигателя с использованием двигательного режима и режима торможения. Затем используют пакет отрицательных полуволн сетевого напряжения в целях торможения универсального электродвигателя путем кратковременной активизации двигательного режима и последующей активизации режима торможения, как это рассмотрено выше со ссылкой на фиг.6.
Claims (15)
1. Электродинамический тормоз для универсального электродвигателя с устройством для переключения с работы в двигательном режиме на работу в режиме торможения, при работе в котором обмотка (3) возбуждения универсального электродвигателя запитана от сети через первый и второй ключи (1, 1'), а якорь (2) универсального электродвигателя замкнут накоротко через второй ключ (1'), и с управляющей электроникой (5), которая при работе в режиме торможения обеспечивает предпочтительно в течение каждой полуволны сетевого напряжения кратковременную активизацию двигательного режима, а затем активизацию режима торможения, для чего сначала в проводящее состояние переводится первый ключ (1), а затем по истечении заданной временной задержки в проводящее состояние переводится второй ключ (1').
2. Электродинамический тормоз по п.1, в котором временная задержка в переводе второго ключа (1') в проводящее состояние имеет такую продолжительность, что предшествующий двигательный режим в течение полуволны сетевого напряжения приводит к уменьшению искрения под щетками на коллекторе универсального двигателя.
3. Электродинамический тормоз по п.1, отличающийся тем, что временная задержка составляет от 1 мкс до 1 мс.
4. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что временная задержка в переводе второго ключа (1') в проводящее состояние после перевода первого ключа в проводящее состояние постоянна при работе в режиме торможения.
5. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что временная задержка в переводе второго ключа (1') в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения зависит от параметров универсального электродвигателя и от сетевого напряжения.
6. Электродинамический тормоз по п.5, отличающийся тем, что временная задержка в переводе второго ключа (1') в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения зависит от сетевого напряжения в момент перевода первого ключа в проводящее состояние и/или от частоты вращения вала универсального электродвигателя и/или от его температуры.
7. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что временная задержка в переводе второго ключа (1') в проводящее состояние имеет в начале работы в режиме торможения некоторое значение, которое уменьшается в ходе дальнейшей работы в режиме торможения и прежде всего в конце работы в режиме торможения становится равным нулю или прежде всего становится отрицательным, в соответствии с чем перевод второго ключа в проводящее состояние начинает предшествовать переводу первого ключа (1) в проводящее состояние.
8. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что временная задержка в переводе второго ключа (1') в проводящее состояние имеет такую продолжительность, что коммутация тока под щетками на коллекторе универсального электродвигателя при инициировании режима торможения в течение по меньшей мере части полуволн перемещается со сбегающего края щеток на их набегающий край, а якорь при работе в режиме торможения не приводится в действие.
9. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что управляющая электроника выполнена с возможностью обеспечения работы в регулируемом и нерегулируемом режиме торможения.
10. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что управляющая электроника (5) выполнена с возможностью обращения к таблице, в которой сохранены значения фазовых углов для перевода первого ключа и/или второго ключа в проводящее состояние, при этом предпочтительно сохранена по меньшей мере одна кривая фазовых углов.
11. Электродинамический тормоз по одному из пп.1-3, отличающийся тем, что при работе в режиме торможения второй ключ (1') включен параллельно якорю (2) и последовательно с обмоткой (3) возбуждения и первым ключом (1), при этом перед вторым ключом (1') в цепь включен переключатель (S) предпочтительно с распознающим контактом (f).
12. Электродинамический тормоз по п.11, отличающийся тем, что переключатель (S) функционально связан в качестве коммутирующего элемента (S') датчика сигналов с управляющей электроникой (5), в линии, ведущей к первому выводу (а) для подключения к сети, расположен первый ключ (1), а в линии, ведущей ко второму выводу (а) для подключения к сети, расположен третий ключ (1'').
13. Способ торможения универсального электродвигателя с использованием устройства для переключения универсального электродвигателя с работы в двигательном режиме на работу в режиме торможения, заключающийся в том, что при работе в режиме торможения обмотку (3) возбуждения универсального электродвигателя запитывают сетевым напряжением через первый и второй ключи (1, 1'), а якорь (2) универсального электродвигателя замыкают накоротко через второй ключ (1'), при этом при работе в режиме торможения предпочтительно в течение каждой полуволны сетевого напряжения кратковременно активизируют двигательный режим работы универсального электродвигателя путем перевода первого ключа в проводящее состояние, а затем по истечении заданной временной задержки активизируют режим торможения путем перевода второго ключа (1') в проводящее состояние.
14. Способ по п.13, при осуществлении которого временную задержку между моментом перевода первого ключа в проводящее состояние для активизации двигательного режима и моментом перевода второго ключа в проводящее состояние для активизации режима торможения задают в пределах от 1 мкс до 1 мс.
15. Способ по п.13 или 14, при осуществлении которого временную задержку в переводе второго ключа (1') в проводящее состояние после перевода первого ключа в проводящее состояние при работе в режиме торможения ставят в зависимость от сетевого напряжения в момент перевода первого ключа в проводящее состояние и/или от частоты вращения вала универсального электродвигателя и/или от его температуры.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE200910060139 DE102009060139A1 (de) | 2009-12-23 | 2009-12-23 | Elektrodynamische Bremseinrichtung für einen Universalmotor |
| DE102009060139.2 | 2009-12-23 | ||
| DE102010004311A DE102010004311A1 (de) | 2010-01-11 | 2010-01-11 | Elektrodynamische Bremseinrichtung für einen Universalmotor |
| DE102010004311.7 | 2010-01-11 | ||
| PCT/EP2010/070457 WO2011076827A2 (de) | 2009-12-23 | 2010-12-22 | Bremseinrichtung für einen universalmotor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2012131272A RU2012131272A (ru) | 2014-01-27 |
| RU2553674C2 true RU2553674C2 (ru) | 2015-06-20 |
Family
ID=44064659
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2012131272/07A RU2553674C2 (ru) | 2009-12-23 | 2010-12-22 | Тормоз для универсального электродвигателя |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9590538B2 (ru) |
| EP (1) | EP2517349B1 (ru) |
| JP (1) | JP5645967B2 (ru) |
| CN (1) | CN102742146B (ru) |
| RU (1) | RU2553674C2 (ru) |
| WO (1) | WO2011076827A2 (ru) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102012205728A1 (de) | 2012-04-05 | 2013-10-10 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum elektrodynamischen Bremsen eines Universalmotors |
| DE102012205876A1 (de) | 2012-04-11 | 2013-10-17 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum elektrodynamischen Bremsen eines Universalmotors |
| US9218075B2 (en) * | 2012-11-01 | 2015-12-22 | Immersion Corporation | Haptically-enabled system with braking |
| EP2947765B1 (en) | 2014-05-20 | 2020-08-26 | Black & Decker Inc. | Electronic braking for a universal motor in a power tool |
| WO2016085862A1 (en) * | 2014-11-24 | 2016-06-02 | Robert Bosch Gmbh | Motor braking system and method for power tools |
| CN104617823A (zh) * | 2015-01-12 | 2015-05-13 | 金懋实业有限公司 | 马达电磁回路阻尼控制电路及其控制方法 |
| US11047528B2 (en) | 2016-02-12 | 2021-06-29 | Black & Decker Inc. | Electronic braking for a power tool having a brushless motor |
| CN107294466A (zh) * | 2016-04-05 | 2017-10-24 | 德昌电机(深圳)有限公司 | 电动工具及其电机驱动系统 |
| CN109120187B (zh) * | 2018-06-05 | 2021-04-27 | 东南大学 | 一种电磁制动装置控制器 |
| CN109450298B (zh) * | 2018-11-29 | 2024-04-30 | 惠州拓邦电气技术有限公司 | 一种电子刹车电路、电器及方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU544573A1 (ru) * | 1975-11-04 | 1977-01-30 | Предприятие П/Я Г-4868 | Устройство дл электродинамического торможени т гового электродвигател |
| SU1707726A1 (ru) * | 1989-12-05 | 1992-01-23 | Харьковский Институт Инженеров Железнодорожного Транспорта Им.С.М.Кирова | Электропривод посто нного тока |
| RU2007835C1 (ru) * | 1992-02-17 | 1994-02-15 | Московский Институт Инженеров Железнодорожного Транспорта | Электропривод ручного инструмента |
| RU2168259C1 (ru) * | 2000-02-14 | 2001-05-27 | Зао "Кросна-Электра" | Электропривод постоянного тока |
| DE10317636A1 (de) * | 2003-04-17 | 2004-11-25 | Robert Bosch Gmbh | Bremseinrichtung für einen Elektromotor |
| US6998804B2 (en) * | 2002-07-23 | 2006-02-14 | C. & E. Fein Gmbh & Co. Kg | Electric motor with electronic brake |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| NL7109226A (ru) * | 1971-07-03 | 1973-01-05 | ||
| JPS5992785A (ja) * | 1982-11-16 | 1984-05-29 | Fuji Electric Co Ltd | モ−タの制動装置 |
| IT1258950B (it) | 1992-06-05 | 1996-03-11 | Black & Decker Inc | Dispositivo di frenatura controllata per motori elettrici, in particolare di utensili portatili |
| DE4333064A1 (de) * | 1993-09-29 | 1995-03-30 | Scintilla Ag | Bremsschaltung für einen Universalmotor |
| AU4334699A (en) | 1998-06-05 | 1999-12-20 | Milwaukee Electric Tool Corporation | Braking and control circuit for electric power tools |
| DE19843106B4 (de) * | 1998-09-21 | 2005-08-18 | Ebm-Papst Mulfingen Gmbh & Co. Kg | System zur Drehzahlsteuerung von Wechselstrom-Motoren |
| DE19932742C1 (de) | 1999-01-07 | 2000-09-21 | Hans Hermann Rottmerhusen | Netzbremseinrichtung für ein Elektrohandwerkzeug |
| JP2002153087A (ja) * | 2000-11-13 | 2002-05-24 | Max Co Ltd | Acモータ駆動回路 |
| US8280569B2 (en) * | 2004-12-09 | 2012-10-02 | General Electric Company | Methods and systems for improved throttle control and coupling control for locomotive and associated train |
| ES1065745Y (es) * | 2007-06-21 | 2008-01-16 | Coprecitec Sl | Dispositivo de control de una lavadora |
| WO2010099787A2 (de) * | 2009-03-03 | 2010-09-10 | Hans Hermann Rottmerhusen | Elektrodynamische bremseinrichtung für einen universalmotor |
-
2010
- 2010-12-22 CN CN201080063277.9A patent/CN102742146B/zh active Active
- 2010-12-22 WO PCT/EP2010/070457 patent/WO2011076827A2/de active Application Filing
- 2010-12-22 RU RU2012131272/07A patent/RU2553674C2/ru not_active IP Right Cessation
- 2010-12-22 JP JP2012545314A patent/JP5645967B2/ja active Active
- 2010-12-22 EP EP10796054.4A patent/EP2517349B1/de active Active
- 2010-12-22 US US13/518,799 patent/US9590538B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SU544573A1 (ru) * | 1975-11-04 | 1977-01-30 | Предприятие П/Я Г-4868 | Устройство дл электродинамического торможени т гового электродвигател |
| SU1707726A1 (ru) * | 1989-12-05 | 1992-01-23 | Харьковский Институт Инженеров Железнодорожного Транспорта Им.С.М.Кирова | Электропривод посто нного тока |
| RU2007835C1 (ru) * | 1992-02-17 | 1994-02-15 | Московский Институт Инженеров Железнодорожного Транспорта | Электропривод ручного инструмента |
| RU2168259C1 (ru) * | 2000-02-14 | 2001-05-27 | Зао "Кросна-Электра" | Электропривод постоянного тока |
| US6998804B2 (en) * | 2002-07-23 | 2006-02-14 | C. & E. Fein Gmbh & Co. Kg | Electric motor with electronic brake |
| DE10317636A1 (de) * | 2003-04-17 | 2004-11-25 | Robert Bosch Gmbh | Bremseinrichtung für einen Elektromotor |
| US7071645B2 (en) * | 2003-04-17 | 2006-07-04 | Robert Bosch Gmbh | Braking device for an electric motor, electrical apparatus provided with the braking device, and a method of braking |
Also Published As
| Publication number | Publication date |
|---|---|
| US9590538B2 (en) | 2017-03-07 |
| CN102742146B (zh) | 2015-12-09 |
| US20120319627A1 (en) | 2012-12-20 |
| RU2012131272A (ru) | 2014-01-27 |
| EP2517349A2 (de) | 2012-10-31 |
| CN102742146A (zh) | 2012-10-17 |
| JP2013516152A (ja) | 2013-05-09 |
| EP2517349B1 (de) | 2014-03-26 |
| WO2011076827A9 (de) | 2011-10-20 |
| WO2011076827A2 (de) | 2011-06-30 |
| WO2011076827A3 (de) | 2012-08-16 |
| JP5645967B2 (ja) | 2014-12-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2553674C2 (ru) | Тормоз для универсального электродвигателя | |
| RU2528413C2 (ru) | Электродинамическое тормозное устройство для универсального двигателя | |
| CN100454747C (zh) | 用于磁通转换电动机的励磁电路和控制方法 | |
| JP2013516152A5 (ru) | ||
| CN100379139C (zh) | 磁通开关电机的励磁电路和控制方法 | |
| US6448727B1 (en) | Mains braking device for a line-powered power tool | |
| JPH11501496A (ja) | 汎用電動機の制動回路 | |
| CN205285922U (zh) | 一种使用可靠的榨汁机 | |
| GB2400990A (en) | Braking device for an electric motor | |
| US10892691B2 (en) | Control circuit and power tool | |
| KR101119549B1 (ko) | 단상 유도 전동기의 시동 시스템 | |
| US4560913A (en) | Sparkless circuit for low horsepower electronic motor brake | |
| CN104617831A (zh) | 单相串励换向器电动机的驱动装置 | |
| US4812728A (en) | Electro magnetic braking circuit for small single phase induction motors | |
| RU2054788C1 (ru) | Асинхронный трехфазный электропривод с питанием от однофазной сети | |
| CN208028798U (zh) | 无刷直流电机驱动电路及系统 | |
| RU1791950C (ru) | Способ управлени электродвигателем посто нного тока электрифицированного вентил | |
| SU731537A1 (ru) | Устройство дл управлени однофазным асинхронным двигателем | |
| SU1683164A1 (ru) | Электропривод посто нного тока | |
| PL175461B1 (pl) | Sposób sterowania silnika reluktancyjnego | |
| JPS6028236B2 (ja) | 制動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20201223 |