RU2052691C1 - Винтовой приводной механизм - Google Patents
Винтовой приводной механизм Download PDFInfo
- Publication number
- RU2052691C1 RU2052691C1 SU894614814A SU4614814A RU2052691C1 RU 2052691 C1 RU2052691 C1 RU 2052691C1 SU 894614814 A SU894614814 A SU 894614814A SU 4614814 A SU4614814 A SU 4614814A RU 2052691 C1 RU2052691 C1 RU 2052691C1
- Authority
- RU
- Russia
- Prior art keywords
- screw
- cam
- eccentric cam
- holes
- movable housing
- Prior art date
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B1/00—Vices
- B25B1/06—Arrangements for positively actuating jaws
- B25B1/10—Arrangements for positively actuating jaws using screws
- B25B1/12—Arrangements for positively actuating jaws using screws with provision for disengagement
- B25B1/125—Arrangements for positively actuating jaws using screws with provision for disengagement with one screw perpendicular to the jaw faces
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Gripping Jigs, Holding Jigs, And Positioning Jigs (AREA)
- Transmission Devices (AREA)
Abstract
Изобретение относится к станкостроению и может быть использовано в зажимных приспособлениях металлорежущих станков или подвижных столах станков, где требуется быстрый подход холостого хода. Целью изобретения является упрощение конструкции. Это достигается тем, что механическое управляющее устройство выполнено в виде храпового механизма одностороннего действия, включающего храповую втулку, соединенную с винтом посредством скользящей шпонки. Втулка размещена между одной из стоек гайки и соответствующим торцом эксцентрикового кулачка подпружинена к последнему. Механизм включает также выступ на кулачке, одна из боковых поверхностей этого выступа перпендикулярна этому торцу, а другая - под углом к нему, и предназначен для взаимодействия с выступом канавки. На внутренней поверхности подвижного корпуса выполнена ограничительная плоскость, предназначенная для взаимодействия с выступом кулачка. Подвижный корпус может быстро перемещаться вручную по направляющей неподвижного корпуса вместе с винтом, в результате чего происходит регулирование зева щек тисков в соответствии с размерами детали. 14 ил.
Description
Изобретение относится к станкостроению и может быть использовано в зажимных приспособлениях металлорежущих станков или подвижных столах станков, где требуется быстрый проход холостого хода, быстрое регулирование относительного расстояния или быстрый зажим. Кроме того, может быть использовано в ручных верстачных тисках.
Известен винтовой приводной механизм, содержащий винт, взаимодействующую с ним гайку. В данном механизме гайка подвижно соединена с неподвижным корпусом, что приводит к понижению прочности [1]
Наиболее близким техническим решением к изобретению является винтовой приводной механизм, содержащий подвижный и неподвижный корпуса, винт, установленный в подвижном корпусе с возможностью вращения и перемещения в радиальном направлении и имеющий на концах цапфы гайку, закрепленную в неподвижном корпусе и выполненную в виде двух стоек, установленных на общем основании, имеющим опорную поверхность, в которых выполнены соосные отверстия, на одном из которых выполнена резьба, предназначенная для взаимодействия с резьбой винта, эксцентриковый кулачок, установленный на винте с возможностью взаимодействия с винтом и эксцентриковым кулачком [2]
Недостатком этого устройства является сложность конструкции.
Наиболее близким техническим решением к изобретению является винтовой приводной механизм, содержащий подвижный и неподвижный корпуса, винт, установленный в подвижном корпусе с возможностью вращения и перемещения в радиальном направлении и имеющий на концах цапфы гайку, закрепленную в неподвижном корпусе и выполненную в виде двух стоек, установленных на общем основании, имеющим опорную поверхность, в которых выполнены соосные отверстия, на одном из которых выполнена резьба, предназначенная для взаимодействия с резьбой винта, эксцентриковый кулачок, установленный на винте с возможностью взаимодействия с винтом и эксцентриковым кулачком [2]
Недостатком этого устройства является сложность конструкции.
Целью изобретения является упрощение конструкции.
Указанная цель достигается тем, что в винтовом приводном механизме, содержащем неподвижный корпус, подвижный корпус, винт, установленный в подвижном корпусе с возможностью вращения и перемещения в радиальном направлении имеющий на концах цапфы, гайку, закрепленную в неподвижном корпусе и выполненную в виде двух стоек, установленных на общем основании, имеющем опорную поверхность, в которых выполнены соосные отверстия, поверхность каждого из которых представляет собой два сопряженных один и другим цилиндрических сектора, на одном из которых выполнена резьба, предназначенная для взаимодействия с резьбой винта, оси цилиндрических секторов смещены одна относительно другой в направлении, перпендикулярном оси винта, на расстояние, превышающее высоту профиля его резьбы, радиус сектора с резьбой равен радиусу винта, а радиус другого сектора превышает радиус винта, эксцентриковый кулачок, установленный на винте с возможностью взаимодействия с опорной поверхностью основания и механическое управляющее устройство, предназначенное для взаимодействия с винтом и эксцентриковым кулачком, при этом в подвижном корпусе выполнены соосные одно другому отверстия, поверхность каждого из которых представляет собой два полуцилиндра, сопряженных между собой плоскими поверхностями, параллельными одна другой и оси винта, а в каждом из отверстий подвижного корпуса размещена соответствующая цапфа винта, механическое управляющее устройство выполнено в виде храпового механизма одностороннего действия, который выполнен в виде храповой втулки, соединенной с винтом посредством скользящей шпонки, втулка размещена между одной из стоек гайки и соответствующим торцом эксцентрикового кулачка и подпружинена к последнему, выступа на обращенном к торцу эксцентрикового кулачка торце храповой втулки, одна из боковых поверхностей которого перпендикулярна к этому торцу, а другая расположена под углом к нему и предназначена для взаимодействия с выступами канавки, выполненной на соответствующем торце эксцентрикового кулачка, поверхность которой ответна поверхности упомянутого выступа, при этом на наружной поверхности подвижного корпуса выполнена ограничительная плоскость, предназначенная для взаимодействия с фиксирующим выступом эксцентрикового кулачка.
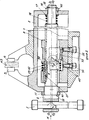
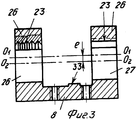
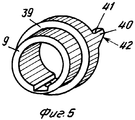
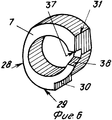
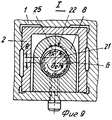
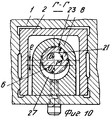
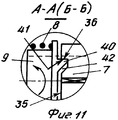
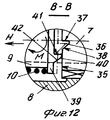
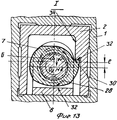
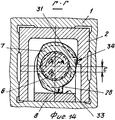
На фиг. 1 дана конструкция верстатных тисков, использующих предлагаемый винтовой приводной механизм; на фиг.2 то же, в положении зажимающем деталь; на фиг. 3 гайка, общий вид; на фиг.4 то же, вид сбоку; на фиг.5 втулка храпового механизма конструкции, представленной на фиг.2; на фиг.6 эксцентриковый кулачок конструкции на фиг.2, вид в перспективе; на фиг.7 сечение А-А и Б-Б на фиг.1 (когда верстачные тиски находятся в разжатом положении); на фиг. 8 сечение В-В на фиг.1 (положение после того, как наружная резьба винта вышла из зацепления с внутренней резьбой осевого отверстий гайки, когда верстачные тиски находятся в разжатом положении; на фиг.9 узел I на фиг.1 (втулка храпового механизма, взаимодействующая с канавкой на кулачке, когда верстачные тиски находятся в разжатом положении); на фиг.10 сечение Г-Г на фиг. 1,2 (относительное положение эксцентрикового кулачка и гайки, когда верстачные тиски находятся в разжатом положении; на фиг.11 сечение А-А и Б-Б на фиг.1 (когда верстачные тиски находятся в положении, зажимающем деталь); на фиг. 12 сечение В-В на фиг.1 (положение, в котором наружная резьба винта взаимодействует с внутренней резьбой гайки, когда верстачные тиски находятся в зажимающем положении); на фиг.13 узел I на фиг.1 (показана втулка храпового механизма, которая отсоединена от канавки кулачка, где верстачные тиски находятся в зажимающем положении); на фиг.14 сечение Г-Г на фиг.1 (относительное положение эксцентрикового кулачка и гайки, когда верстачные тиски находятся в зажимающем положении).
Винтовой приводной механизм содержит неподвижный корпус 1, имеющий полую часть подвижный корпус 2, установленный в упомянутой полой части неподвижного корпуса; две щеки 3,4, рукоятку 5, винт 6, эксцентриковый кулачок 7, гайку 8, выполненную в виде двух стоек, установленных на общем основании, втулку 9 храпового механизма, нажимную пружину 10 и прокладку 11.
Подвижной корпус 2 может скользить вдоль направляющей в неподвижном корпусе, а рукоятка 5 проходит через отверстие на левом конце винта 6 и осуществляет поворот его влево (направление N) или вправо (направление М).
Два конца винта 6 расположены соответственно в опорных отверстиях 12, 13, выполненных в передней и задней вертикальных стенках подвижного корпуса 2 и имеющих удлиненную круглую форму с двумя параллельными боковыми стенками 14, при этом ширина отверстий равна диаметру винта, чтобы обеспечить перемещения винта только вертикально вверх и вниз.
Прокладка 11 установлена между внутренней торцовой поверхностью 15 на левом выступе винта 6 и наружной торцовой поверхностью опорного отверстия 12 на передней вертикальной стенке подвижного корпуса 2. На правом буртике винта 6 установлена цилиндрическая нажимная пружина 10, конец которой через прокладку 16 упирается во внутреннюю сторону задней вертикальной стеки подвижного корпуса 2, тогда как на конце правой шейки винта 6 установлена прокладка 17 и стопорное кольцо 18 для предотвращения выскальзывания шейки.
При сборке необходимо предусмотреть зазор δ между торцовой поверхностью 19 на левом выступе винта 6 и торцовой поверхностью 20 прокладки 11. Ширина зазора δ составляет 1/2 шага резьбы винта 6. Зазор δ служит для того, чтобы когда зубья случайно упираются в резьбу 21 и 22, винт 6 мог слегка сместиться в осевом направлении и затем обеспечить нормальное зацепление.
Винт 6 имеет шпоночное соединение со втулкой 9 храпового механизма с помощью скользящей шпонки 23 и проходит также через осевое отверстие втулки 9, кроме того, винт 6 имеет наружную резьбу 21 (см.фиг.1 и 2).
Гайка 8 (см.фиг.4) прикреплена к неподвижному корпусу 1 с помощью болтов 24. В двух стойках 25 гайки 8 выполнены соответственно концентричные отверстия 26, форма которых в поперечном сечении образована двумя дугами окружности, т. е. верхней дуги а О1, а центральный угол дуги а не превышает 180оС. Радиусом верхней дуги а является r1, который равен радиусу резьбы 21 винта 6. Поверхности на верхних дугах а двух половинок имеют соответственно внутренние резьбы 22, которые могут входить в зацепление с наружной резьбой 21 винта 6. Центром круга нижней дуги b является О2, который располагается ниже центра О1 верхней дуги а и между двумя центрами О1 и О2 имеется эксцентриковое расстояние е. Величина последнего должна быть больше, чем глубина зуба резьб 22 и 24, а радиус r2 нижней дуги b должен быть больше, чем радиус наружной резьбы винта 6 для гарантии того, что при опускании винта 6 из положения О1 в положение О2 он не будет касаться никаких частей стенки отверстия гайки 8 и может свободно перемещаться в осевом направлении.
Эксцентриковый кулачок 7 установлен между одной стойкой 25 и втулкой 9. Кривая для кулачка разделена на участок кривой хода вниз (с низшей точкой 27) и на участок кривой хода вверх (с наивысшей точкой 28). Кроме того, кулачок 7 имеет установочный выступ 29 и установочную плоскость 30. При повороте влево установочный выступ 29 касается горизонтальной ограничительной плоскости 31 подвижного корпуса 2, в этот момент наинизшая точка 27 на кривой кулачка будет прямо против опорной поверхности 32 гайки 8, так чтобы кулачок 7 и винт 6 располагались в самом свободном (разжатом) положении О2.
Аналогично при повороте вправо установочная плоскость 30 будет касаться поверхности 33 боковой стенки на подвижном корпусе 2, а в этот момент наивысшая точка 28 на участке кривой хода вверх кулачка 7 будет контактировать с опорной поверхностью 32 под действием хода вверх кривой кулачка 7, заставляя ост винта 6 подниматься из положения О2 в положение О1, в результате чего его наружная резьба входит в зацепление с внутренней резьбой 22 гайки 8 (см. фиг. 13). На торцовой поверхности 34 кулачка 7 предусмотрена одна (или больше) канавок 35, которая имеет вертикальную поверхность 36 и наклонную поверхность 37.
Храповая втулка 9 храпового механизма одностороннего действия соединяется с винтом 6 с помощью скользящей шпонки 23 и имеет выступ 38 на торце, одна из боковых поверхностей 39 которого перпендикулярна к этому торцу, а другая (наклонная) поверхность 40 расположена под углом к нему и предназначена для взаимодействия с выступом канавки 35, выполненной на соответствующем торце эксцентрикового кулачка 7, поверхность которого ответна поверхности упомянутого выступа. При этом на наружной поверхности эксцентрикового кулачка 7 выполнен фиксирующий выступ 38, предназначенный для взаимодействия с ограничительной плоскостью 31, выполненный на внутренней поверхности подвижного корпуса 2.
Работа винтового приводного механизма.
Этап свободного регулирования раскрытия щек верстачных тисков.
Наинизшая точка 27 на кривой хода вниз кулачка 7 обращена к опорной поверхности 32, кулачок 7 находится в разъединенном положении относительно опорной поверхности 32 гайки 8. Концы винта 6 поддерживаются соответственно опорными поверхностями 41 и 42 опорных отверстий 12 и 13 передней и задней вертикальных стенок подвижного корпуса 2, положения опорных отверстий 12 и 13 гарантируют, что центральная ось винта 6 будет находиться в центре О2 нижней дуги b, а наружная резьба 21 винта 6 не будет контактировать ни с какой частью внутренних поверхностей 26 отверстий гайки 8, в результате чего подвижный корпус 2 может быстро перемещаться вручную по направляющей неподвижного корпуса 1 вместе с винтом 6 с целью быстрого регулирования зева щек тисков в соответствии с размером детали. В зависимости от размера детали 43 подвижный корпус перемещается в соответствующее положение, в котором щеки 3 и 4 контактируют с деталью 43.
Этап по введению во взаимодействие наружной резьбы винта с внутренними резьбами гайки.
Поворачивая рукоятку 5 вправо (обозначено стрелкой М) для вращения винта 6 последний через направляющую шпонку 23 приводит в действие втулку 9, поворачивающуюся вправо, выступ 38 втулки 9 находится в канавке 35 кулачка 7. Поворот втулки 9 вправо приводит к тому, что наклонная поверхность 40 упирается в наклонную поверхность 37 канавки 35 (см. положение, обозначенное двойной пунктирной линией), таким образом, под действием осевого усилия нажимной пружины 10 наклонная поверхность 40 втулки 9 смещается и кулачок поворачивается вправо, в результате чего его кривая хода вверх скользит по опорной поверхности 32 гайки 8 до тех пор, пока установочная плоскость 30 кулачка 7 не будет контактировать с ограничительной поверхностью 31 для прекращения вращения кулачка. В это же время наивысшая точка 28 на кривой ход вверх кулачка 7 только касается опорной поверхности 32 гайки 8 и винт 6 также поднимается вертикально вдоль параллельных боковых стенок 14 отверстия 12, 13 в наивысшее положение, т.е. центральная ось винта 6 поднимается вертикально на эксцентриковое расстояние е из своего первоначального положения О2-О2 в положение О1-О1 до тех пор, пока наружная резьба 21 винта 6 не войдет в зацепление с резьбами 22 отверстий гайки 8 так, чтобы обеспечивалось их свободное вращение друг в друге.
Этап зажатия детали.
Продолжаем вращать рукоятку 5 вправо (направление М). Теперь поскольку установочная плоскость 30 кулачка 7 взаимодействует с боковой ограничительной поверхностью 33 подвижного корпуса 2 и предотвращает вращение кулачка 7, то вращательное перемещение втулки 9 будет передаваться наклонной поверхности 40 и 39, принадлежащих выступу 41 втулки 9 канавке 35, контактирующих друг с другом. В результате этого образуется осевая составляющая, действующая в направлении Н. Когда величина осевой составляющей больше, чем осевое давление пружины 10, то втулка 3 смещается в направлении Н до тех пор, пока выступ 41 не выйдет из канавки 35 и не будет скользить по поверхности 34 кулачка 7. Продолжая вращение рукоятки, поскольку наружная резьба 21 винта 6 находится в зацеплении с внутренней резьбой 22 гайки 8, при этом резьбы являются правосторонними, а гайка 8 прикреплена к неподвижному корпусу 1, то винт 6 продвигается вперед в осевом направлении К, вращаясь вправо. Таким образом винт 6 через торцовую поверхность 19 на своем левом выступе и прокладку 11 толкает подвижный корпус 2 до тех пор, пока щеки 3 и 4 не зажмут деталь 43.
Этап освобождения или разжатия детали.
После того, как деталь обработана и ее необходимо удалить поворачиванием рукоятку 5 влево для вращения винта 6 соответственно влево. Поскольку наружная резьба 21 винта 6 первоначально находилась в зацеплении с внутренней резьбой 22 гайки 8, то винт 6 перемещается вдоль оси в направлении Н, поворачиваясь при этом влево, и через прокладку 17 и стопорное кольцо 18 перемещается подвижный корпус 2 в направлении Н с тем, чтобы щеки разжали деталь.
Этап расцепления наружной резьбы винта от внутренней резьбы гайки 8.
В момент разжатия детали, т.е. когда рукоятка 5 поворачивается влево, втулка 9 приводящаяся в действие винтом 6 и направляющей шпонкой 23, тоже поворачивается влево до тех пор, пока выступ 41 втулки 9 не западет в канавку 35 под действием нажимной пружины 10. Винт 6 продолжает поворот втулки 9 влево и смещает кулачок 7 влево под действием двух контактирующих поверхностей соответственно на выступе 41 и канавке 35, постепенно переводя кулачок в освобождающее положение, т.е. осуществляя постепенный перевод наинизшей точки 27 хода вниз в ее самое нижнее положение до тех пор, пока фиксирующий выступ 41 кулачка 7 не будет контактировать с горизонтальной ограничительной плоскостью, в результате чего центральная ось винта 6 вертикально опускается из положения О1 в положение О2, проходя расстояние е, тем самым полностью выводя наружу резьбу 21 винта 6 из зацепления с внутренней резьбой 22 гайки 8. Теперь передний и задний концы винта 6 опускаются соответственно на нижние опорные поверхности 41 и 42 опорных отверстий 12 и 13 передней и задней вертикальных стенках подвижного корпуса 2.
Таким образом, винт 6 может перемещаться вперед и назад вместе с подвижным корпусом 2 и тем самым винтовой приводной механизм обеспечивает быстрое регулирование раскрытия щек и тисков.
Claims (1)
- ВИНТОВОЙ ПРИВОДНОЙ МЕХАНИЗМ, содержащий неподвижный корпус, подвижный корпус, винт, установленный в подвижном корпусе с возможностью вращения и перемещения в радиальном направлении и имеющий на концах цапфы, гайку, закрепленную в неподвижном корпусе и выполненную в виде двух стоек, установленных на общем основании, имеющем опорную поверхность, в которых выполнены соосные отверстия, эксцентриковый кулачок, установленный на винте с возможностью взаимодействия с опорной поверхностью основания, и механическое управляющее устройство, предназначенное для взаимодействия с винтом и эксцентриковым кулачком, при этом в подвижном корпусе выполнены соосные отверстия, поверхность каждого из которых представляет собой два полуцилиндра, сопряженные между собой плоскими поверхностями, параллельными одна другой и оси винта, а в каждом из отверстий подвижного корпуса размещена соответствующая цапфа винта, отличающийся тем, что, с целью упрощения конструкции, эксцентриковый кулачок выполнен в виде втулки с плоским срезом и кольцевой канавкой на наружной цилиндрической поверхности, в которой выполнены два радиальных отверстия, расположенные в разных сечениях, оси этих отверстий параллельны, а механическое управляющее устройство выполнено в виде храпового механизма одностороннего действия, который выполнен в виде штифта со сквозным отверстием, установленного в одном из радиальных отверстий эксцентрикового кулачка, имеющего выступ на одном из своих торцов, одна из боковых поверхностей которого перпендикулярна к этому торцу, а другая расположена под углом к нему, кольцевой пружины, размещенной в кольцевой канавке экцентрикового кулачка и сквозном отверстии штифта, и по крайней мере двух продольных пазов, выполненных на винте, форма поверхности каждого из которых соответственна поверхности выступа штифта, продольные пазы предназначены для попеременного взаимодействия с этим выступом, при этом форма поверхности каждого из соосных отверстий стоек гайки представляет собой два полуцилиндра, на одном из которых выполнена резьба, предназначенная для взаимодействия с резьбой винта, сопряженные между собой двумя параллельными одна другой и оси винта плоскостями, причем расстояние между этими плоскостями равно наружному диаметру винта, а фиксирующий выступ эксцентрикового кулачка выполнен в виде штифта, закрепленного во втором радиальном отверстии эксцентрикового кулачка.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN88104905.0 | 1988-08-08 | ||
| CN 88104905 CN1016524B (zh) | 1988-08-08 | 1988-08-08 | 丝杠垂直升降开合式螺杆传动机构 |
| CN88106661.3 | 1988-09-14 | ||
| CN 88106661 CN1011158B (zh) | 1988-09-14 | 1988-09-14 | 改进的丝杠垂直升降开合螺杆机构 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU2052691C1 true RU2052691C1 (ru) | 1996-01-20 |
Family
ID=25742474
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU894614814A RU2052691C1 (ru) | 1988-08-08 | 1989-08-07 | Винтовой приводной механизм |
| SU894614814D RU2052692C1 (ru) | 1988-08-08 | 1989-08-07 | Винтовой приводной механизм |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| SU894614814D RU2052692C1 (ru) | 1988-08-08 | 1989-08-07 | Винтовой приводной механизм |
Country Status (10)
| Country | Link |
|---|---|
| EP (1) | EP0354644B1 (ru) |
| JP (1) | JPH0288179A (ru) |
| AU (1) | AU614390B2 (ru) |
| BR (1) | BR8903962A (ru) |
| DE (2) | DE68917047T2 (ru) |
| GB (1) | GB2221634A (ru) |
| MX (1) | MX172487B (ru) |
| MY (1) | MY104146A (ru) |
| NZ (1) | NZ229177A (ru) |
| RU (2) | RU2052691C1 (ru) |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0423256U (ru) * | 1990-06-20 | 1992-02-26 | ||
| US5282392A (en) * | 1991-01-31 | 1994-02-01 | Chaolai Fan | Synchro-clutching screw-and-nut mechanism |
| CN1024037C (zh) * | 1991-04-03 | 1994-03-16 | 范朝来 | 三点包容螺母升降自动同步开合式螺杆机构 |
| CN1042055C (zh) * | 1993-04-23 | 1999-02-10 | 范朝来 | 一种快慢速螺杆传动机构 |
| US6135435A (en) * | 1996-08-07 | 2000-10-24 | Wilton Corporation | Woodworker's vise |
| GB2371252A (en) * | 2001-01-22 | 2002-07-24 | Record Tools Ltd | Bench vice with quick release mechanism |
| DE10151597C1 (de) * | 2001-10-18 | 2003-05-15 | Howaldtswerke Deutsche Werft | System und Verfahren zur Erkennung und Abwehr von Laserbedrohungen und Unterwasserobjekten für Unterwasserfahrzeuge |
| US6957808B2 (en) | 2001-11-13 | 2005-10-25 | Wmh Tool Group, Inc. | Apparatus for securing a workpiece |
| USD500238S1 (en) | 2002-02-01 | 2004-12-28 | Wmh Tool Group, Inc. | Apparatus for securing a work piece |
| US7017898B2 (en) | 2002-03-01 | 2006-03-28 | Wmh Tool Group, Inc. | Apparatus for securing a workpiece |
| US7066457B2 (en) | 2003-01-21 | 2006-06-27 | Wmh Tool Group, Inc. | Apparatus for securing a workpiece |
| US7798478B2 (en) | 2004-02-23 | 2010-09-21 | Walter Meier (Manufacturing) Inc. | Parallel clamp and accessories therefor |
| CN101259603B (zh) | 2007-11-09 | 2012-06-27 | 范朝来 | 一种节材型多功能台钳 |
| CN103056792B (zh) * | 2013-02-04 | 2015-06-17 | 南通金鑫五金工具有限公司 | 台虎钳 |
| CN103358240A (zh) * | 2013-07-30 | 2013-10-23 | 高素军 | 一种虎钳夹紧装置 |
| CN110513456A (zh) * | 2019-09-24 | 2019-11-29 | 广州铭匠智能科技有限公司 | 一种丝杆螺母机构 |
| CN114738367B (zh) * | 2022-04-14 | 2024-04-12 | 合肥屹坤精工科技有限公司 | 一种用于服务器设备精密紧固件防脱结构 |
| CN115118099B (zh) * | 2022-08-05 | 2023-12-15 | 中达电机股份有限公司 | 一种电机铜排转子表面加工用工装及加工工艺 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE198374C (ru) * | ||||
| GB170406A (en) * | 1920-07-20 | 1921-10-20 | Johan Fredrik Olof Ohborg | Improvements in vices |
| US2102602A (en) * | 1935-09-28 | 1937-12-21 | Steel Nut & Joseph Hampton Ltd | Vise |
| GB462834A (en) * | 1935-09-28 | 1937-03-17 | Steel Nut & Joseph Hampton Ltd | Improvements relating to vices |
| US2138245A (en) * | 1937-10-30 | 1938-11-29 | David C Smith | Adjustable clamping tool |
| US2430458A (en) * | 1945-08-27 | 1947-11-11 | Titan Mfg Company | Automatic screw control |
| GB697238A (en) * | 1950-09-23 | 1953-09-16 | Steel Nut & Joseph Hampton Ltd | Improvements in quick release vices |
| GB800885A (en) * | 1956-03-13 | 1958-09-03 | Steel Nut And Joseph Hampton L | Improvements in or relating to vices |
| GB819506A (en) * | 1957-01-11 | 1959-09-02 | Wilton Tool Mfg Co Inc | Clamping and holding device |
| GB857116A (en) * | 1958-09-19 | 1960-12-29 | William Henry Norris Gittins | Vices |
| US4262892A (en) * | 1980-02-22 | 1981-04-21 | Wu Rong Chun | Quick-operating bench vise |
| JPH0328253Y2 (ru) * | 1986-02-07 | 1991-06-18 | ||
| US4834355A (en) * | 1987-09-03 | 1989-05-30 | Chaolai Fan | Mechanical program-controlled fast range-adjusting device |
-
1989
- 1989-05-17 NZ NZ229177A patent/NZ229177A/en unknown
- 1989-05-26 EP EP89305364A patent/EP0354644B1/en not_active Expired - Lifetime
- 1989-05-26 DE DE68917047T patent/DE68917047T2/de not_active Expired - Fee Related
- 1989-06-08 JP JP89144269A patent/JPH0288179A/ja active Granted
- 1989-06-09 DE DE8907067U patent/DE8907067U1/de not_active Expired
- 1989-06-27 AU AU37101/89A patent/AU614390B2/en not_active Ceased
- 1989-07-31 GB GB8917443A patent/GB2221634A/en not_active Withdrawn
- 1989-08-07 RU SU894614814A patent/RU2052691C1/ru active
- 1989-08-07 MX MX017091A patent/MX172487B/es unknown
- 1989-08-07 BR BR898903962A patent/BR8903962A/pt not_active IP Right Cessation
- 1989-08-07 RU SU894614814D patent/RU2052692C1/ru active
- 1989-08-08 MY MYPI89001072A patent/MY104146A/en unknown
Non-Patent Citations (1)
| Title |
|---|
| 1. Патент США N 2102602, кл. 81-83, 1937. 2. Патент США N 2430458, кл. 74-424.8, 1947. * |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2052692C1 (ru) | 1996-01-20 |
| NZ229177A (en) | 1991-06-25 |
| GB8917443D0 (en) | 1989-09-13 |
| DE8907067U1 (de) | 1989-09-07 |
| EP0354644B1 (en) | 1994-07-27 |
| DE68917047D1 (de) | 1994-09-01 |
| EP0354644A2 (en) | 1990-02-14 |
| JPH0288179A (ja) | 1990-03-28 |
| MX172487B (es) | 1993-12-17 |
| JPH0543464B2 (ru) | 1993-07-01 |
| BR8903962A (pt) | 1990-03-20 |
| EP0354644A3 (en) | 1991-03-20 |
| GB2221634A (en) | 1990-02-14 |
| MY104146A (en) | 1994-02-28 |
| AU614390B2 (en) | 1991-08-29 |
| DE68917047T2 (de) | 1995-01-26 |
| AU3710189A (en) | 1990-02-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2052691C1 (ru) | Винтовой приводной механизм | |
| AU704054B2 (en) | Quickly movable elastically engaging screw-and-nut mechanism | |
| KR930004106B1 (ko) | 공작기계용 이송 구동장치 | |
| CN108480498B (zh) | 冲压送料机械手及其夹料机构 | |
| US4411440A (en) | Swinging chuck for turning machines | |
| US3844028A (en) | Automatic tool changer | |
| US5927700A (en) | Transmission device for a clamp | |
| US4923185A (en) | Vertical-lift screw drive mechanism | |
| CN109676414B (zh) | 自动找正定位装置 | |
| CN114210838B (zh) | 一种桶体定型装置 | |
| CA1287651C (en) | Mechanical program-controlled fast range-adjusting device | |
| US5588642A (en) | Clamping apparatus | |
| JPH07171729A (ja) | 急緩速スクリュー駆動装置 | |
| CN210335653U (zh) | 一种虎钳 | |
| CN211192124U (zh) | 一种汽车转向器螺杆钻铰孔的固定夹具 | |
| CN210210226U (zh) | 一种挤压、旋拧、拉拔一体化拆卸液压支架柱体销轴装置 | |
| US5358087A (en) | Depth stop assembly for a machine tool | |
| SU952456A1 (ru) | Самоцентрирующий патрон | |
| US2701014A (en) | Tube and pipe shearing mechanism | |
| CN221347647U (zh) | 一种轴承组装线 | |
| CN221170392U (zh) | 一种带保护的直线导轨锁紧装置及直线导轨 | |
| GB2035869A (en) | Screwing up or thread chasing machine | |
| CN215172030U (zh) | 一种基于车床传统的便于安装的蜗轮 | |
| CN220128742U (zh) | 一种便于固定安装的对位平台 | |
| CN109249246B (zh) | 一种轴承生产用的固定装置 |