KR20200067256A - 물품 반송 설비 - Google Patents
물품 반송 설비 Download PDFInfo
- Publication number
- KR20200067256A KR20200067256A KR1020180010505A KR20180010505A KR20200067256A KR 20200067256 A KR20200067256 A KR 20200067256A KR 1020180010505 A KR1020180010505 A KR 1020180010505A KR 20180010505 A KR20180010505 A KR 20180010505A KR 20200067256 A KR20200067256 A KR 20200067256A
- Authority
- KR
- South Korea
- Prior art keywords
- rail
- path
- auxiliary
- width direction
- traveling
- Prior art date
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67709—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations using magnetic elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
- B65G35/06—Mechanical conveyors not otherwise provided for comprising a load-carrier moving along a path, e.g. a closed path, and adapted to be engaged by any one of a series of traction elements spaced along the path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/06—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for fragile sheets, e.g. glass
- B65G49/061—Lifting, gripping, or carrying means, for one or more sheets forming independent means of transport, e.g. suction cups, transport frames
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67706—Mechanical details, e.g. roller, belt
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67724—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations by means of a cart or a vehicule
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G2201/00—Indexing codes relating to handling devices, e.g. conveyors, characterised by the type of product or load being conveyed or handled
- B65G2201/02—Articles
- B65G2201/0297—Wafer cassette
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Platform Screen Doors And Railroad Systems (AREA)
Abstract
물품 반송 설비는, 주행 레일과, 물품 반송차와, 안내 레일과, 자성체에 의해 구성된 보조 레일을 구비하고, 주행 레일은, 제1 레일부 및 제2 레일부를 구비하고, 주행 경로의 일부에, 제2 레일부가 존재하지 않는 레일 분단 영역이 존재하고, 물품 반송차는, 주행륜과, 안내 레일에 대하여 경로 폭 방향으로 접촉하는 피접촉체와, 보조 레일에 대하여 경로 폭 방향으로 배열되는 상태로 위치하는 자석을 구비하고, 피접촉체는, 편륜 주행 상태에서, 안내 레일에 대하여 폭 방향 제1 측으로부터 접촉하고, 자석은, 편륜 주행 상태에서, 보조 레일에 대하여 폭 방향 제2 측에 위치한다.
Description
본 발명은, 주행 경로를 따라 설치된 주행 레일과, 상기 주행 레일 상을 상기 주행 경로를 따라 주행하는 물품 반송차(article transport vehicle)를 구비한 물품 반송 설비에 관한 것이다.
이러한 물품 반송 설비의 일례가, 일본 공개특허 제2011―116313호 공보(특허문헌 1)에 기재되어 있다. 특허문헌 1의 물품 반송 설비는, 주행 레일이, 서로 평행하게 배치된 제1 레일부와 제2 레일부를 구비하고 있고, 주행 경로의 일부에, 제2 레일부가 존재하지 않는 레일 분단(分斷) 영역이 존재한다. 물품 반송차는, 레일 분단 영역을 주행할 때는 양 차륜 주행 상태로부터 편륜 주행(one wheeled running) 상태로 이행한다. 그리고, 물품 반송차가 레일 분단 영역을 주행할 때 편륜 주행 상태의 물품 반송차가 전도(轉倒; fall down)하지 않도록, 물품 반송차에는, 안내 레일에 대하여 경로 폭 방향의 폭 방향 제1 측으로부터 접촉하는 피접촉체(被接觸體)가 구비되어 있다.
상기와 같은 물품 반송 설비에서는, 물품 반송차의피접촉체는, 물품 반송차가 전도(fall down) 하지 않도록 안내 레일에 접촉되어 있고, 피접촉체가 안내 레일에 접촉된 상태로 물품 반송차가 주행 경로를 따라 주행함으로써, 피접촉체와 안내 레일과의 사이에 생기는 마찰에 의해 먼지가 발생하기 쉽다.
그래서, 피접촉체와 안내 레일과의 사이에 생기는 마찰에 의해 발생하는 먼지를 억제할 수 있는 물품 반송 설비의 실현이 요구된다.
전술한 문제를 해결하기 위하여, 물품 반송 설비의 특징적 구성은, 주행 경로를 따라 설치된 주행 레일과, 상기 주행 레일 상을 상기 주행 경로를 따라 주행하는 물품 반송차를 구비하고,
상기 주행 레일과는 별개로, 상기 주행 경로를 따라 설치된 안내 레일과, 자성체에 의해 구성되고, 상기 안내 레일과는 상이한 위치에 있어서 상기 주행 경로를 따라 설치된 보조 레일을 구비하고, 상기 주행 레일은, 상하 방향에서 볼 때 상기 주행 경로와 교차하는 경로 폭 방향으로 일정 간격으로 서로 평행하게 배치된 제1 레일부 및 제2 레일부를 구비하고, 상기 주행 경로의 일부에, 상기 제2 레일부가 존재하지 않는 레일 분단 영역이 존재하고, 상기 안내 레일 및 상기 보조 레일은, 상기 레일 분단 영역에 있어서 상기 제1 레일부와 평행하게 배치되고, 상기 물품 반송차는, 상기 제1 레일부 및 상기 제2 레일부 상을 전동(轉動)하는 주행륜과, 상기 안내 레일에 대하여 상기 경로 폭 방향으로 접촉하는 피접촉체와, 상기 보조 레일에 대하여 상기 경로 폭 방향으로 배열되는 상태로 위치하는 자석을 구비하고, 상기 경로 폭 방향에서의, 상기 제1 레일부의 측을 폭 방향 제1 측, 상기 제2 레일부의 측을 폭 방향 제2 측으로 하여, 상기 피접촉체는, 상기 물품 반송차가 상기 레일 분단 영역을 주행하는 편륜 주행 상태에서, 상기 안내 레일에 대하여 상기 폭 방향 제1 측으로부터 접촉하고, 상기 자석은, 상기 편륜 주행 상태에서, 상기 보조 레일에 대하여 상기 폭 방향 제2 측에 위치하는 점에 있다.
이들의 특징적 구성에 의하면, 물품 반송차가 레일 분단 영역을 주행하는 경우에는, 제2 레일부가 존재하지 않으므로, 물품 반송차는 편륜 주행 상태로 된다. 이 물품 반송차의 편륜 주행 상태에서는, 피접촉체가 안내 레일에 대하여 폭 방향 제1 측으로부터 접촉함으로써, 물품 반송차가 전도하는 것이 방지된다.
그리고, 물품 반송차의 편륜 주행 상태에서는, 자석은 보조 레일에 대하여 폭 방향 제2 측에 위치한다. 즉, 자석의 흡인력에 의해 보조 레일을 흡인함으로써, 그 반작용에 의해 자석이 보조 레일측(폭 방향 제1 측)으로 끌어당겨진다. 이로써, 자석과 함께 피접촉체가 폭 방향 제1 측으로 끌어당겨져, 피접촉체의 안내 레일에 대한 접촉 압력이 경감되어, 피접촉체와 안내 레일과의 사이에 생기는 마찰에 의해 발생하는 먼지가 억제된다.
도 1은 물품 반송 설비의 평면도
도 2는 물품 반송차의 측면도
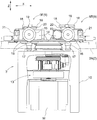
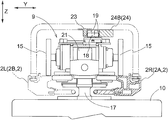
도 3은 물품 반송차의 정면도
도 4는 물품 반송차가 직진 주행하는 분기부의 평면도
도 5는 물품 반송차가 분기 주행(branching travel)하는 분기부의 평면도
도 6은 안내 보조륜 및 전자석을 좌측으로 이동시킨 물품 반송차의 정면도
도 7은 안내 보조륜 및 전자석을 우측으로 이동시킨 물품 반송차의 정면도
도 8은 전자석이 보조 레일에 흡착한 상태를 나타낸 평면도
도 2는 물품 반송차의 측면도
도 3은 물품 반송차의 정면도
도 4는 물품 반송차가 직진 주행하는 분기부의 평면도
도 5는 물품 반송차가 분기 주행(branching travel)하는 분기부의 평면도
도 6은 안내 보조륜 및 전자석을 좌측으로 이동시킨 물품 반송차의 정면도
도 7은 안내 보조륜 및 전자석을 우측으로 이동시킨 물품 반송차의 정면도
도 8은 전자석이 보조 레일에 흡착한 상태를 나타낸 평면도
1. 실시 형태
물품 반송 장치의 실시 형태에 대하여 도면을 참조하여 설명한다.
도 1 내지 도 3에 나타낸 바와 같이, 물품 반송 설비는, 주행 경로(1)를 따라 설치된 주행 레일(2)과, 주행 레일(2) 상을 주행 경로(1)를 따라 주행하는 물품 반송차(3)를 구비하고 있다. 주행 레일(2)은, 좌측 레일부(2L)와 우측 레일부(2R)와의 좌우 한 쌍의 레일부에 의해 구성되어 있다. 그리고, 본 실시 형태에서는, 물품 반송차(3)는, 반도체 기판을 수용하는 FOUP(Front Opening Unified Pod)를 물품(W)으로서 반송한다.
도 1에 나타낸 바와 같이, 주행 경로(1)는, 1개의 환형(環形)의 주경로(主經路)(4)와, 복수의 물품 처리부(P)를 경유하는 환형의 부경로(副經路)(5)와, 이들 주경로(4)와 부경로(5)를 접속하는 접속 경로(6)를 구비하고 있다. 주행 경로(1)는, 부경로(5)를 복수 구비하고 있다. 물품 반송차(3)는, 주경로(4) 및 복수의 부경로(5)에 있어서는, 모두 같은 주회(周回) 방향(본 실시 형태에서는 반시계 회전 방향)으로 주행한다. 그리고, 도 1에 있어서는, 물품 반송차(3)의 주행 방향을 화살표로 나타내고 있다.
접속 경로(6)로서, 주경로(4)로부터 부경로(5)를 향해 물품 반송차(3)를 분기 주행시키는 분기용의 접속 경로(6)와, 부경로(5)로부터 주경로(4)를 향해 물품 반송차(3)를 합류 주행(merging travel)시키는 합류용의 접속 경로(6)가 구비되어 있다.
다음에, 물품 반송차(3)에 대하여 설명한다. 그리고, 주행 경로(1)에 따른 방향을 경로 길이 방향 X라고 하고, 상하 방향 Z에서 볼 때, 경로 길이 방향 X에 대하여 직교하는 방향을 경로 폭 방향 Y라고 하여 설명한다. 또한, 주행 경로(1)에 있어서, 물품 반송차(3)의 주행 방향[물품 반송차(3)가 주행하는 방향]을 하류측,그 반대측을 상류측이라고 하여 설명한다.
또한, 예를 들면, 물품 반송차(3)가 주행 경로(1)의 직선부(1A)를 주행하고 있을 때는, 물품 반송차(3)의 전후 방향과 주행 경로(1)의 경로 길이 방향 X와는 같은 방향으로 되어, 물품 반송차(3)의 좌우 방향과 주행 경로(1)의 경로 폭 방향 Y와는 같은 방향으로 된다. 경로 폭 방향 Y는, 주행 경로(1)와 교차하는 폭 방향에 상당한다.
도 2 및 도 3에 나타낸 바와 같이, 물품 반송차(3)는, 천정으로부터 현수 지지된(suspended and supported)) 주행 레일(2) 상을 그 주행 레일(2)을 따라 주행하는 주행부(9)와, 주행 레일(2)의 아래쪽에 위치하여 주행부(9)에 현수 지지된 본체부(10)를 구비하고 있다. 본체부(10)에는, 본체부(10)에 승강 가능하게 구비되어 물품(W)을 현수 상태로 지지하는 지지 기구(機構)(13)가 구비되어 있다.
주행부(9)로서, 물품 반송차(3)의 전후 방향으로 배열되는 제1 주행부(9F)와 제2 주행부(9R)가 구비되어 있다.
제1 주행부(9F)에는, 전동식(電動式)의 제1 모터(14)에 의해 회전 구동되는 좌우 한 쌍의 주행륜(15)이 장비되어 있다. 이 좌우 한 쌍의 주행륜(15)은, 주행 레일(2)[우측 레일부(2R) 및 좌측 레일부(2L)]의 상면을 전동하도록, 제1 주행부(9F)에 장비되어 있다.
또한, 제1 주행부(9F)에는, 차체 상하 방향을 따르는 세로 축심 주위[상하 축심(軸心; axis) 주위]에서 회전 가능한 좌우 한 쌍의 안내륜(guiding wheel)(16)이 장비되어 있다. 이 좌우 한 쌍의 안내륜(16)은, 좌측 레일부(2L)와 우측 레일부(2R)와의 사이에 위치하여 우측 레일부(2R)의 좌측면(내측면) 및 좌측 레일부(2L)의 우측면(안내면)을 전동하도록, 제1 주행부(9F)에 장비되어 있다. 그리고, 좌우 한 쌍의 안내륜(16)에 대하여는, 전후 방향으로 배열되는 상태로 제1 주행부(9F)에 2조 장비되어 있다.
제2 주행부(9R)에는, 제1 주행부(9F)와 마찬가지로, 1조의 좌우 한 쌍의 주행륜(15)과 2조의 좌우 한 쌍의 안내륜(16)이 장비되어 있다.
이와 같이, 물품 반송차(3)는, 주행 레일(2) 상을 전동하는 주행륜(15)을 구비하고 있다.
제1 주행부(9F) 및 제2 주행부(9R)에는, 주행륜(15)의 하단(下端)보다 아래쪽으로 돌출하는 상태로 연결축(17)이 구비되어 있다.
도 2 및 도 3에 나타낸 바와 같이, 제1 주행부(9F)의 연결축(17)과 본체부(10)는, 상하 방향 Z를 따르는 세로 축심 주위에 상대 회전 가능하게 연결되어 있다. 제2 주행부(9R)의 연결축(17)과 본체부(10)는, 상하 방향 Z를 따르는 세로 축심 주위에 상대 회전 가능하게 연결되어 있다. 그러므로, 물품 반송차(3)는, 제1 주행부(9F) 및 제2 주행부(9R)가 본체부(10)에 대하여 세로 축심 주위로 요동(搖動)함으로써, 주행 경로(1)의 곡선부(1B)를 따라 주행 가능하게 되어 있다.
물품 반송차(3)는, 제1 주행부(9F)의 안내륜(16) 및 제2 주행부(9R)의 안내륜(16)이 주행 레일(2)에 의해 안내되면서, 제1 주행부(9F)의 주행륜(15) 및 제2 주행부(9R)의 주행륜(15)이 제1 모터(14)에 의해 회전 구동되는 것에 의하여, 주행 경로(1)를 따라 주행한다.
도 2에 나타낸 바와 같이, 제1 주행부(9F)에는, 상하 방향 Z를 따르는 축심(axis) 주위에서 회전하는 회전 가능한 한 쌍의 안내 보조륜(18)과, 한 쌍의 전자석(19)이 구비되어 있다. 한 쌍의 안내 보조륜(18) 및 한 쌍의 전자석(19)은, 주행륜(15)보다 위쪽에 위치하도록 제1 주행부(9F)에 설치되어 있다. 그리고, 안내 보조륜(18)은, 안내 레일(23)에 대하여 경로 폭 방향 Y(좌우 방향)으로 접촉하는 피접촉체에 상당한다. 또한, 한 쌍의 전자석(19)에 의하여, 보조 레일(24)에 대하여 경로 폭 방향 Y로 배열되는 상태로 위치하는 자석이 구성되어 있다.
한 쌍의 안내 보조륜(18)은, 전후 방향으로 배열되는 상태로 설치되어 있다. 한 쌍의 전자석(19)은, 좌우 방향으로 배열되는 상태로 설치되어 있다. 또한, 한 쌍의 전자석(19)은, 전후 방향으로 배열되는 한 쌍의 안내 보조륜(18)의 사이에 위치하고 있고, 좌우 방향에 있어서 안내 보조륜(18)의 폭 내에 위치하고 있다. 한 쌍의 안내 보조륜(18)은, 한 쌍의 전자석(19)의 상하 방향 Z의 폭 내에 설치되어 있고, 한 쌍의 안내 보조륜(18)과 한 쌍의 전자석(19)은 같은 높이로 설치되어 있다. 또한, 한 쌍의 안내 보조륜(18)의 각각 , 및 한 쌍의 전자석(19)의 각각은, 그 적어도 일부가 안내 레일(23)의 상하 폭 내에 위치하는 동시에 보조 레일(24)의 상하 폭 내에 위치하고 있다.
이와 같이, 한 쌍의 안내 보조륜(18) 및 한 쌍의 전자석(19)을 설치함으로써, 상하 방향 Z에서 볼 때, 전자석(19)의 자극면(磁極面)은, 안내 보조륜(18)의 외주면(外周面)보다 보조 레일(24)로부터 이격되어 있다. 그러므로, 전자석(19)의 흡인력에 의하여, 보조 레일(24)이 존재하는 측으로 주행부(9)가 끌려간 경우라도, 보조 레일(24)에는 안내 보조륜(18)이 접촉하고, 보조 레일(24)과 전자석(19)과의 사이에는 간극(D)이 형성되도록 되어 있다.
제2 주행부(9R)에는, 제1 주행부(9F)와 마찬가지로, 한 쌍의 안내 보조륜(18)과 한 쌍의 전자석(19)이 구비되어 있다. 그러므로, 물품 반송차(3)에는, 안내 레일(23)에 대하여 경로 폭 방향 Y로 접촉하는 4개의 안내 보조륜(18)과, 보조 레일(24)에 대하여 2개씩 경로 폭 방향 Y로 배열되는 상태로 위치하는 4개의 전자석(19)을 구비하고 있다. 그리고, 안내 보조륜(18)은, 물품 반송차(3)의 전후 방향으로 배열되는 상태로 2개 이상 설치되어 있고, 본 실시 형태에서는 4개 설치되어 있다. 전자석(19)은, 전후 방향으로 배열되는 안내 보조륜(18)의 사이에 설치되어 있다.
또한, 물품 반송차(3)에 구비되어 있는 4개의 안내 보조륜(18)은, 모두 같은 높이로 설치되어 있으므로, 어느 안내 보조륜(18)도, 주행륜(15)과 레일부가 접촉하는 접촉점에 대하여 상하 방향 Z로 가장 이격되어 있는 피접촉체인 최(最)이격 피접촉체에 상당한다. 그리고, 한 쌍의 전자석(19)은, 최이격 피접촉체에 상당하는 피접촉체와 같은 높이로 설치되어 있다.
제1 주행부(9F)에는, 한 쌍의 안내 보조륜(18) 및 한 쌍의 전자석(19)을 지지하는 지지체(20)와, 지지체(20)를 좌우 방향으로 이동시키는 제2 모터(21)가 구비되어 있다. 그리고, 제1 주행부(9F)는, 제2 모터(21)에 의해 지지체(20)를 좌우 방향으로 이동시킴으로써, 한 쌍의 안내 보조륜(18)과 한 쌍의 전자석(19)을 일체로 좌우 방향으로 이동시킨다.
그리고, 제1 주행부(9F)는, 제2 모터(21)에 의해 지지체(20)를 좌우 방향으로 이동시킴으로써, 한 쌍의 안내 보조륜(18)의 위치를 제1 위치(도 4, 도 6 참조)와 제2 위치(도 5, 도 7 참조)로 이동시키는 동시에, 한 쌍의 전자석(19)의 위치를 제3 위치(도 4, 도 6 참조)와 제4 위치(도 5, 도 7 참조)로 이동시킨다. 즉, 도 4, 도 6에 나타낸 바와 같이, 제2 모터(21)에 의해 지지체(20)를 주행 방향을 향해 좌측으로 이동시킴으로써, 한 쌍의 안내 보조륜(18)을 제1 위치로 이동시키는 동시에 한 쌍의 전자석(19)을 제3 위치로 이동시킨다. 또한, 도 5, 도 7에 나타낸 바와 같이, 제2 모터(21)에 의해 지지체(20)를 주행 방향을 향해 우측으로 이동시킴으로써, 한 쌍의 안내 보조륜(18)을 제2 위치로 이동시키는 동시에 한 쌍의 전자석(19)을 제4 위치로 이동시킨다.
도 4, 도 6에 나타낸 바와 같이, 한 쌍의 안내 보조륜(18)의 제1 위치는, 한 쌍의 안내 보조륜(18)이 제1 주행부(9F)의 좌우 방향의 중앙보다 좌측에 있고, 안내 레일(23)에 대하여 좌측으로부터 맞닿는 위치이다. 또한, 제1 위치는, 한 쌍의 안내 보조륜(18)이 제1 보조 레일(24A)(안내 레일(23)에 대하여 좌측에 위치하는 보조 레일(24)보다 우측에 있는 위치이다.
도 5, 도 7에 나타낸 바와 같이, 한 쌍의 안내 보조륜(18)의 제2 위치는, 한 쌍의 안내 보조륜(18)이 제1 주행부(9F)의 좌우 방향의 중앙보다 우측에 있고, 안내 레일(23)에 대하여 우측으로부터 맞닿는 위치이다. 또한, 제2 위치는, 한 쌍의 안내 보조륜(18)이 제2 보조 레일(24B)[안내 레일(23)에 대하여 우측에 위치하는 보조 레일(24)]보다 좌측에 있는 위치이다.
도 4, 도 6에 나타낸 바와 같이, 한 쌍의 전자석(19)의 제3 위치는, 한 쌍의 전자석(19)이 안내 레일(23)보다 좌측으로서 또한 제1 보조 레일(24A)보다 우측의 위치이다.
도 5, 도 7에 나타낸 바와 같이, 한 쌍의 전자석(19)의 제4 위치는, 한 쌍의 전자석(19)이 안내 레일(23)보다 우측으로서 또한 제2 보조 레일(24B)보다 좌측의 위치이다.
제2 주행부(9R)에는, 제1 주행부(9F)와 마찬가지로, 지지체(20)와 제2 모터(21)가 구비되어 있다. 그리고, 제2 주행부(9R)는, 제1 주행부(9F)와 마찬가지로, 제2 모터(21)에 의해 지지체(20)를 좌우 방향으로 이동시킴으로써, 한 쌍의 안내 보조륜(18)과 한 쌍의 전자석(19)을 일체로 좌우 방향으로 이동시키도록 구성되어 있다.
그리고, 지지체(20)가, 한 쌍의 안내 보조륜(18)과 한 쌍의 전자석(19)을 연동(連動)시키는 연동부로서 기능한다. 지지체(20)는, 한 쌍의 안내 보조륜(18)이 안내 레일(23)에 대하여 좌측으로 이동함에 따라서, 한 쌍의 전자석(19)을 보조 레일(24)[제1 보조 레일(24A)]에 대하여 우측의 근방[보조 레일(24)에 대한 전자석(19)의 흡인력이 설정값 이상의 위치]로 이동시킨다. 또한, 지지체(20)는, 한 쌍의 안내 보조륜(18)이 안내 레일(23)에 대하여 우측으로 이동함에 따라서, 한 쌍의 전자석(19)을 보조 레일(24)[제2 보조 레일(24B)]에 대하여 좌측의 근방[보조 레일(24)에 대한 전자석(19)의 흡인력이 설정값 이상의 위치]로 이동시킨다.
다음에, 주행 레일(2)에 대하여 설명을 추가한다. 주행 레일(2)은, 좌측 레일부(2L)와 우측 레일부(2R)를 구비하고 있다. 이들 좌측 레일부(2L)와 우측 레일부(2R)는, 상하 방향 Z에서 볼 때 경로 폭 방향 Y로 일정 간격으로 서로 평행하게 배치되어 있다. 도 4 및 도 5에 나타낸 바와 같이, 주행 경로(1)의 일부[주행 경로(1)가 분기하거나 또는 합류하는 부분]에, 좌측 레일부(2L)와 우측 레일부(2R) 중 한쪽이 존재하지 않는 레일 분단 영역(E)이 존재하고 있다. 즉, 좌측 레일부(2L)와 우측 레일부(2R)는 주행 경로(1)를 따라 설치되어 있지만, 주행 경로(1)가 분기되거나 또는 합류하는 부분에서는, 좌측 레일부(2L)와 우측 레일부(2R) 중 한쪽은, 레일 분단 영역(E)에 있어서 경로 길이 방향 X로 분단되어 불연속으로 되어 있다.
좌측 레일부(2L)와 우측 레일부(2R)에 대하여, 레일 분단 영역(E)에 있어서 경로 길이 방향 X로 분단되어 불연속으로 되어 있는 레일부를 제2 레일부(2B)라고 하고, 남은 한쪽의 레일부를 제1 레일부(2A)라고 하는 경우가 있다. 또한, 경로 폭 방향 Y에 있어서의, 제1 레일부(2A)의 측을 폭 방향 제1 측, 제2 레일부(2B)의 측을 폭 방향 제2 측이라고 하는 경우가 있다.
즉, 도 4에 나타낸 바와 같이, 분기부(7)를 직진 주행하는 경우에는, 레일 분단 영역(E)에 있어서 우측 레일부(2R)가 존재하지 않게 된다. 이 경우, 이 우측 레일부(2R)를 제2 레일부(2B)라고 하고, 좌측 레일부(2L)를 제1 레일부(2A)라고 하는 경우가 있다. 그리고, 경로 폭 방향 Y에 있어서의 좌측을 폭 방향 제1 측, 우측을 폭 방향 제2 측이라고 하는 경우가 있다.
또한, 도 5에 나타낸 바와 같이, 분기부(7)를 우측 방향으로 분기 주행하는 경우에는, 레일 분단 영역(E)에 있어서 좌측 레일부(2L)가 존재하지 않게 된다. 이 경우, 이 좌측 레일부(2L)를 제2 레일부(2B)라고 하고, 우측 레일부(2R)를 제1 레일부(2A)라고 하는 경우가 있다. 그리고, 경로 폭 방향 Y에 있어서의 우측을 폭 방향 제1 측, 좌측을 폭 방향 제2 측이라고 하는 경우가 있다.
물품 반송 설비는, 주행 레일(2)과는 별개로, 주행 경로(1)를 따라 설치된 비자성체(非磁性體)의 안내 레일(23)과, 안내 레일(23)은 상이한 위치에 있어서 주행 경로(1)를 따라 설치된 자성체의 보조 레일(24)을 구비하고 있다. 이들 안내 레일(23) 및 보조 레일(24)은, 레일 분단 영역(E)에 있어서 제1 레일부(2A)와 평행하게 배치되어 있다.
도 4 및 도 5에 나타낸 바와 같이, 주행 경로(1)에서의 2개의 경로가 접속 또는 교차하고 있는 개소(箇所)에는, 안내 보조륜(18)을 안내하는 안내 레일(23)과, 전자석(19)이 흡착하는 보조 레일(24)이 구비되어 있다.
안내 레일(23) 및 보조 레일(24)은, 레일 분단 영역(E)에 배치되어 있다. 설명을 추가하면, 안내 레일(23) 및 보조 레일(24)은, 레일 분단 영역(E)에 더하여, 레일 분단 영역(E)으로부터 상류측으로 설정 길이의 영역 및 하류측으로 설정 길이의 영역에 설치되어 있다. 즉, 안내 레일(23) 및 보조 레일(24)은, 주행 경로(1)의 전 영역에 설치되어 있는 것은 아니고, 주행 경로(1)에 따른 방향에 있어서 제2 레일부(2B)가 존재하지 않는 레일 분단 영역(E)에 설치되어 있다. 그리고, 레일 분단 영역(E)은, 제2 레일부(2B)가 존재하지 않는 영역으로 할 수 있다.
안내 레일(23)은, 주행 레일(2)보다 상방이면서 또한 상기 주행 레일(2) 상을 전동하는 주행륜(15)보다 위쪽에, 상하 방향 Z에서 볼 때 좌우 한 쌍의 레일부[좌측 레일부(2L)와 우측 레일부(2R)]의 중앙부에 위치하도록 설치되어 있다. 안내 레일(23)은, 비자성체에 의해 구성되어 있다. 예를 들면, 안내 레일(23)은, 알루미늄 합금에 의해 구성되어 있다.
보조 레일(24)은, 안내 레일(23)과 같은 높이로 설치되어 있고, 상하 방향 Z에서 볼 때 좌우 한 쌍의 레일부(좌측 레일부(2L)와 우측 레일부(2R)의 중앙부에 대하여 경로 폭 방향 Y의 한쪽 측이나 다른 쪽 측에 위치하도록 설치되어 있다. 보조 레일(24)은, 자성체에 의해 구성되어 있다. 예를 들면, 보조 레일(24)은, 철에 의해 구성되어 있다.
도 4∼도 7을 참조하여, 주행 레일(2), 안내 레일(23) 및 보조 레일(24)에 대하여 분기부(7)를 예로 들어 설명을 추가한다. 이 분기부(7)는, 도 1 및 도 4에 나타낸 바와 같이, 주경로(4)로부터 경로 폭 방향 Y의 제1 방향 측(우측)으로 접속 경로(6)가 분기되어 있다. 분기부(7)의 주행 경로(1)는, 주경로(4)와, 이 주경로(4)로부터 제1 방향 측으로 분기되는 접속 경로(6)를 구비하고 있다.
주경로(4)를 따라 설치된 주행 레일(2)은, 레일 분단 영역(E)에 있어서 우측의 레일부인 우측 레일부(2R)가 존재하지 않는다. 그러므로, 물품 반송차(3)가 분기부(7)를 주경로(4)를 따라 직진 주행하는 경우에는, 경로 폭 방향 Y의 좌측이 폭 방향 제1 측으로 되고, 경로 폭 방향 Y의 우측이 폭 방향 제2 측으로 된다.
또한, 접속 경로(6)를 따라 설치된 주행 레일(2)은, 레일 분단 영역(E)에 있어서 좌측의 레일부인 좌측 레일부(2L)가 존재하지 않는다. 그러므로, 물품 반송차(3)가 분기부(7)를 주경로(4)로부터 접속 경로(6)로 분기 주행하는 경우에는, 경로 폭 방향 Y의 우측이 폭 방향 제1 측으로 되고, 경로 폭 방향 Y의 좌측이 폭 방향 제2 측으로 된다.
분기부(7)에는, 주경로(4)를 따라 설치된 안내 레일(23)과, 접속 경로(6)를 따라 설치된 안내 레일(23)이 있다. 분기부(7)에서는, 상하 방향 Z에서 볼 때, 안내 레일(23)이 Y자형으로 설치되어 있다.
또한, 분기부(7)에는, 주경로(4)를 따라 설치된 제1 보조 레일(24A)와, 접속 경로(6)를 따라 설치된 제2 보조 레일(24B)과의 한 쌍의 보조 레일(24)이 설치되어 있다. 제1 보조 레일(24A)은, 안내 레일(23)에 대하여 경로 길이 방향 X의 좌측에 설치되어 있고, 제2 보조 레일(24B)은, 안내 레일(23)에 대하여 경로 길이 방향 X의 우측에 설치되어 있다. 제1 보조 레일(24A)과 제2 보조 레일(24B)은 같은 높이로 설치되어 있다.
도시는 생략하지만, 분기부(7)의 입구에 제1 피검출체가 구비되고, 분기부(7)의 출구에 제2 피검출체가 구비되어 있다. 제1 피검출체는, 분기부(7)에 구비되어 있는 안내 레일(23)이나 보조 레일(24)보다 상류에 설치되어 있고, 제2 피검출체는, 분기부(7)에 구비되어 있는 안내 레일(23)이나 보조 레일(24)보다 하류에 설치되어 있다.
그리고, 상세한 설명은 생략하지만, 물품 반송차(3)는, 제1 피검출체를 검출함에 따라서, 상기 물품 반송차(3)가 주행하는 경로에 따른 위치에 안내 보조륜(18)이 위치하도록 제2 모터(21)를 구동시키는 동시에 급전부로부터 한 쌍의 전자석(19)에 급전(給電)하도록 제어부가 제어하도록 구성되어 있다. 그리고, 물품 반송차(3)는, 제2 피검출체를 검출함에 따라서, 급전부로부터 한 쌍의 전자석(19)에 대한 급전을 정지하도록 제어부가 제어하도록 구성되어 있다. 이와 같이, 물품 반송차(3)는, 레일 분단 영역(E)에 진입하기 전에 전자석(19)에 대한 급전을 개시하고, 레일 분단 영역(E)을 퇴출함에 따라 전자석(19)에 대한 급전을 정지한다.
또한, 전자석(19)의 흡인력은, 안내 보조륜(18)이 안내 레일(23)에 접촉되고 있는 상태에 있어서 전자석(19)의 흡인력의 반작용에 의해 전자석(19)이 보조 레일(24) 측(폭 방향 제1 측)으로 이동하지 않는 흡인력으로 설정되어 있다.
그리고, 도 4 및 도 6에 나타낸 바와 같이, 주경로(4)를 주행하는 물품 반송차(3)가, 2조의 한 쌍의 안내 보조륜(18)[이하, 단지 안내 보조륜(18)이라고 함]을 제1 위치로 이동시키고, 또한 한 쌍의 전자석(19)[이하, 단지 전자석(19)이라고 함]을 제3 위치로 이동시킨 상태로 분기부(7)에 진입함으로써, 물품 반송차(3)는, 안내 보조륜(18) 및 전자석(19)이 안내 레일(23)의 좌측에 위치하는 동시에 보조 레일(24)의 우측에 위치하는 상태로 주행한다. 즉, 물품 반송차(3)는, 상하 방향 Z에서 볼 때, 안내 보조륜(18) 및 전자석(19)이 안내 레일(23)과 제1 보조 레일(24A)과의 사이에 위치하는 상태로 주행한다.
그러므로, 안내 보조륜(18)은 안내 레일(23)에 의해 안내되면서, 물품 반송차(3)는 분기부(7)를 주경로(4)를 따라 직진 주행한다.
그리고, 물품 반송차(3)가 분기부(7)를 직진 주행할 때, 레일 분단 영역(E)에 있어서 좌우 한 쌍의 주행륜(15) 중 우측의 주행륜(15)이 우측 레일부(2R)에 의해 지지되지 않는 상태(편륜 주행 상태)가 생긴다. 그러나, 이 편륜 주행 상태에서는, 안내 보조륜(18)이 안내 레일(23)에 대하여 좌측으로부터 접촉함으로써, 물품 반송차(3)가 우측으로 넘어지는 것이 방지된다. 또한, 이 편륜 주행 상태에서는, 전자석(19)이 보조 레일(24)을 흡인함으로써, 안내 보조륜(18)이 안내 레일(23)에 접촉하는 접촉 압력이 경감된다.
또한, 도 5 및 도 7에 나타낸 바와 같이, 주경로(4)를 주행하는 물품 반송차(3)가, 안내 보조륜(18)을 제2 위치로 이동시키고, 또한 전자석(19)을 제4 위치로 이동시킨 상태에서 분기부(7)로 진입함으로써, 물품 반송차(3)는, 안내 보조륜(18) 및 전자석(19)이 안내 레일(23)의 우측에 위치하는 동시에 보조 레일(24)의 좌측에 위치하는 상태로 주행한다. 즉, 물품 반송차(3)는, 상하 방향 Z에서 볼 때, 안내 보조륜(18) 및 전자석(19)이 안내 레일(23)과 제2 보조 레일(24B)과의 사이에 위치하는 상태로 주행한다.
그러므로, 안내 보조륜(18)은 안내 레일(23)에 의해 안내되면서, 물품 반송차(3)는 분기부(7)를 주경로(4)를 따라 분기 주행한다.
그리고, 물품 반송차(3)가 분기부(7)를 분기 주행할 때, 레일 분단 영역(E)에 있어서 좌우 한 쌍의 주행륜(15) 중 좌측의 주행륜(15)이 좌측 레일부(2L)에 의해 지지되지 않는 상태(편륜 주행 상태)가 생긴다. 그러나, 이 편륜 주행 상태에서는, 안내 보조륜(18)이 안내 레일(23)에 대하여 우측으로부터 접촉함으로써, 물품 반송차(3)가 좌측으로 넘어지는 것이 방지된다. 또한, 이 편륜 주행 상태에서는, 전자석(19)의 흡인력에 의해 보조 레일(24)을 흡인함으로써, 안내 보조륜(18)이 안내 레일(23)에 접촉하는 접촉 압력이 경감된다.
2. 그 외의 실시 형태
다음에, 물품 반송 설비의 그 외의 실시 형태에 대하여 설명한다.
(1) 상기 실시 형태에서는, 4개의 전자석(19)을 물품 반송차(3)에 구비하였지만, 물품 반송차(3)에 구비하는 전자석(19)의 수는 적절히 변경해도 된다. 또한, 4개의 전자석(19)을 경로 폭 방향 Y로 2개 배열하고, 그 2개의 전자석(19)을 경로 길이 방향 X에 2열 배열하였으나, 4개의 전자석(19)을 경로 길이 방향 X로 배열하는 등, 전자석(19)의 배치는 적절히 변경해도 된다. 또한, 자석으로서, 전자석(19)을 물품 반송차(3)에 구비하였지만, 자석으로서, 영구 자석을 물품 반송차(3)에 구비해도 된다.
(2) 상기 실시 형태에서는, 자석[4개의 전자석(19)]의 흡인력을, 안내 보조륜(18)이 안내 레일(23)에 접촉되고 있는 상태에 있어서 자석의 흡인력의 반작용에 의해 자석이 보조 레일(24) 측(폭 방향 제1 측)으로 이동하지 않는 흡인력으로 설정하였으나, 자석의 흡인력을, 안내 보조륜(18)이 안내 레일(23)에 접촉되고 있는 상태에 있어서 자석의 흡인력의 반작용에 의해 자석이 보조 레일(24) 측(폭 방향 제1 측)으로 이동하는 흡인력으로 설정해도 된다.
(3) 상기 실시 형태에서는, 안내 보조륜(18)을 자석의 상하 폭 내에 위치하도록 설치했지만, 안내 보조륜(18)이, 자석에 대하여 위쪽으로 일부 돌출되거나 또는 자석에 대하여 아래쪽에 일부 돌출되도록 설치해도 된다. 또한, 안내 보조륜(18)의 전체가, 자석의 상하 폭으로부터 위쪽으로 벗겨지거나, 또는 자석의 상하 폭으로부터 아래쪽으로 벗겨지도록 설치해도 된다.
(4) 상기 실시 형태에서는, 물품 반송차(3)에 구비한 복수의 안내 보조륜(18)을 모두 같은 높이로 설치했지만, 물품 반송차(3)에 구비한 복수의 안내 보조륜(18)의 일부를, 남아 일부의 안내 보조륜(18)보다 높은 위치에 설치하는 등, 안내 보조륜(18)의 높이는 적절히 변경해도 된다.
(5) 상기 실시 형태에서는, 안내 레일(23)과 보조 레일(24)이 같은 높이로 마주보도록 배치된 구성을 예로 들어 설명하였으나, 이와 같은 배치에 한정되지는 않는다. 안내 레일(23)과 보조 레일(24)이 상이한 높이로 배치되어 있어도 된다. 이 경우에는, 당연히, 안내 보조륜(18)과 전자석(19)이 상이한 높이로 배치된다. 즉, 안내 보조륜(18)은 안내 레일(23)에 대응하는 높이로 배치되고, 전자석(19)은 보조 레일(24)에 대응하는 높이로 배치된다.
(6) 상기 실시 형태에서는, 안내 레일(23)을 비자성체에 의해 구성하였지만, 자석이 안내 레일(23)으로부터 충분히 이격되어 있는 경우에는, 안내 레일(23)을 자성체에 의해 구성해도 된다.
(7) 상기 실시 형태에서는, 레일 분단 영역(E)에 진입하기 전에 전자석(19)에 대한 급전을 개시하고, 레일 분단 영역(E)을 통과한 후에 전자석(19)에 대한 급전을 정지하였으나, 전자석(19)에 대하여 상시 급전하도록 해도 된다.
(8) 상기 실시 형태에서는, 자석에 대하여 급전하는 경우에 있어서, 경로 폭 방향 Y로 배열되는 한 쌍의 전자석(19)의 양쪽으로 동시에 급전했지만, 자석에 대하여 급전하는 경우에 있어서, 경로 폭 방향 Y로 배열되는 한 쌍의 전자석(19) 중, 보조 레일(24)에 가까운 측(폭 방향 제1 측)의 전자석(19)에만 급전하도록 해도 된다.
(9) 그리고, 전술한 각각의 실시 형태에서 개시된 구성은, 모순이 생기지 않는 한, 다른 실시 형태에서 개시된 구성과 조합시켜 적용할 수도 있다. 그 외의 구성에 관해서도, 본 명세서에 있어서 개시된 실시 형태는 모든 점에서 단순한 예시에 지나지 않는다. 따라서, 본 개시의 취지를 벗어나지 않는 범위 내에서, 적절히, 각종 개변(改變; modification)을 행할 수 있다.
3. 상기 실시 형태의 개요
이하, 상기에 있어서 설명한 물품 반송 설비의 개요에 대하여 설명한다.
물품 반송 설비는, 주행 경로를 따라 설치된 주행 레일과, 상기 주행 레일 상을 상기 주행 경로를 따라 주행하는 물품 반송차를 구비하고,
상기 주행 레일과는 별개로, 상기 주행 경로를 따라 설치된 안내 레일과, 자성체에 의해 구성되고, 상기 안내 레일과는 상이한 위치에 있어서 상기 주행 경로를 따라 설치된 보조 레일을 구비하고, 상기 주행 레일은, 상하 방향에서 볼 때 상기 주행 경로와 교차하는 경로 폭 방향으로 일정 간격으로 서로 평행하게 배치된 제1 레일부 및 제2 레일부를 구비하고, 상기 주행 경로의 일부에, 상기 제2 레일부가 존재하지 않는 레일 분단 영역이 존재하고, 상기 안내 레일 및 상기 보조 레일은, 상기 레일 분단 영역에 있어서 상기 제1 레일부와 평행하게 배치되고, 상기 물품 반송차는, 상기 제1 레일부 및 상기 제2 레일부 상을 전동하는 주행륜과, 상기 안내 레일에 대하여 상기 경로 폭 방향으로 접촉하는 피접촉체와, 상기 보조 레일에 대하여 상기 경로 폭 방향으로 배열되는 상태로 위치하는 자석을 구비하고, 상기 경로 폭 방향에서의, 상기 제1 레일부의 측을 폭 방향 제1 측, 상기 제2 레일부의 측을 폭 방향 제2 측으로 하여, 상기 피접촉체는, 상기 물품 반송차가 상기 레일 분단 영역을 주행하는 편륜 주행 상태에서, 상기 안내 레일에 대하여 상기 폭 방향 제1 측으로부터 접촉하고, 상기 자석은, 상기 편륜 주행 상태에서, 상기 보조 레일에 대하여 상기 폭 방향 제2 측에 위치한다.
이와 같은 구성에 의하여, 물품 반송차가 레일 분단 영역을 주행하는 경우에는, 제2 레일부가 존재하지 않으므로, 물품 반송차는 편륜 주행 상태로 된다. 이 물품 반송차의 편륜 주행 상태에서는, 피접촉체가 안내 레일에 대하여 폭 방향 제1 측으로부터 접촉함으로써, 물품 반송차가 전도하는 것이 방지된다.
그리고, 물품 반송차의 편륜 주행 상태에서는, 자석은 보조 레일에 대하여 폭 방향 제2 측에 위치한다. 즉, 자석의 흡인력에 의해 보조 레일을 흡인함으로써, 그 반작용에 의해 자석이 보조 레일측(폭 방향 제1 측)으로 끌어당겨진다. 이로써, 자석과 함께 피접촉체가 폭 방향 제1 측으로 끌어당겨져, 피접촉체의 안내 레일에 대한 접촉 압력이 경감되어, 피접촉체와 안내 레일과의 사이에 생기는 마찰에 의해 발생하는 먼지가 억제된다.
여기서, 상기 피접촉체 중 적어도 일부가, 상기 보조 레일의 상하 폭 내에 위치하고, 상기 안내 레일이, 비자성체에 의해 구성되고, 상기 자석의 자극면은, 상기 피접촉체의 외주면보다도 상기 보조 레일로부터 이격되어 있는 것이 바람직하다.
이 구성에 의하면, 자석의 흡인력의 반작용에 의해 자석이 보조 레일측(폭 방향 제1 측)으로 이동하여 자석이 보조 레일에 접촉하도록 해도, 자석보다 먼저 피접촉체가 보조 레일에 접촉한다. 그러므로, 자석이 보조 레일에 접촉하는 것을 회피할 수 있다.
또한, 상기 피접촉체가, 상기 물품 반송차의 주행 방향으로 배열되는 상태로 2개 이상 설치되고, 상기 자석이, 상기 주행 방향으로 배열되는 상기 피접촉체의 사이에 설치되어 있는 것이 바람직하다.
이 구성에 의하면, 자석에 대하여 주행 방향의 양측에 위치하는 피접촉체를 보조 레일에 접촉시킬 수 있다. 그러므로, 예를 들면, 1개의 피접촉체가 보조 레일에 접촉된 상태에 있어서 자석의 흡인력의 반작용에 의해 자석이 보조 레일 측으로 끌어당겨지고, 이로써, 피접촉체를 중심으로 물품 반송차가 상하 방향을 따르는 축심 주위로 회전한다는 것을 방지할 수 있다.
또한, 상기 자석은, 상기 주행륜과 상기 제1 레일부가 접촉하는 접촉점에 대하여 상하 방향으로 가장 이격되어 있는 상기 피접촉체인 최이격 피접촉체와 같은 높이 또는 상기 최이격 피접촉체보다도 상기 접촉점에 대하여 상하 방향으로 이격된 높이에 설치되어 있는 것이 바람직하다.
이 구성에 의하면, 자석을, 최이격 피접촉체와 같은 높이나 최이격 피접촉체보다도 접촉점에 대하여 상하 방향으로 이격된 높이에 설치함으로써, 자석을, 최이격 피접촉체보다도 접촉점에 대하여 상하 방향으로 가까운 위치에 설치한 경우와 비교하여, 자석을 접촉점에 대하여 상하 방향으로 이격된 높이에 설치할 수 있다. 이로써, 물품 반송차에 작용하는, 자석의 흡인력에 의한 접촉점 주위의 회전 모멘트를 크게 할 수 있으므로, 자석의 흡인력이 같아도 피접촉체의 안내 레일에 대한 접촉 압력을 경감시키는 효과를 높일 수 있다.
또한, 상기 물품 반송차는, 상기 피접촉체와 상기 자석을 연동시키는 연동부를 포함하고, 상기 연동부는, 상기 피접촉체가 상기 안내 레일에 대하여 상기 폭 방향 제1 측으로 이동함에 따라서, 상기 자석을 상기 보조 레일에 대하여 가까워지는 방향으로 이동시키는 것이 바람직하다.
이 구성에 의하면, 안내 레일이나 보조 레일의 위치의 변화에 따라 피접촉체와 자석의 이동이 필요한 경우가 있지만, 피접촉체와 자석은 연동부에 의해 연동하고 있으므로, 예를 들면, 피접촉체와 자석을 이동시키는 데 연동부를 이동시키는 단일의 모터로 되는 등, 피접촉체와 자석을 이동시키는 구성의 간소화를 도모할 수 있다.
[산업 상의 이용 가능성]
본 개시에 관한 기술은, 주행 레일과 물품 반송차를 구비한 물품 반송 설비에 이용할 수 있다.
1: 주행 경로
2: 주행 레일
2A: 레일부
3: 물품 반송차
15: 주행륜
18: 안내 보조륜(피접촉체)
19: 전자석(자석)
20: 지지체(연동부)
23: 안내 레일
24: 보조 레일
E: 레일 분단 영역
2: 주행 레일
2A: 레일부
3: 물품 반송차
15: 주행륜
18: 안내 보조륜(피접촉체)
19: 전자석(자석)
20: 지지체(연동부)
23: 안내 레일
24: 보조 레일
E: 레일 분단 영역
Claims (5)
- 주행 경로를 따라 설치된 주행 레일;
상기 주행 레일 상을 상기 주행 경로를 따라 주행하는 물품 반송차(article transport vehicle);
상기 주행 레일과는 별개로, 상기 주행 경로를 따라 설치된 안내 레일; 및
자성체에 의해 구성되고, 상기 안내 레일과는 상이한 위치에 있어서 상기 주행 경로를 따라 설치된 보조 레일;
을 포함하고,
상기 주행 레일은, 상하 방향에서 볼 때 상기 주행 경로와 교차하는 경로 폭 방향으로 일정 간격으로 서로 평행하게 배치된 제1 레일부 및 제2 레일부를 구비하고,
상기 주행 경로의 일부에, 상기 제2 레일부가 존재하지 않는 레일 분단 영역이 존재하고,
상기 안내 레일 및 상기 보조 레일은, 상기 레일 분단 영역에 있어서 상기 제1 레일부와 평행하게 배치되고,
상기 물품 반송차는, 상기 제1 레일부 및 상기 제2 레일부 상을 전동(轉動)하는 주행륜과, 상기 안내 레일에 대하여 상기 경로 폭 방향으로 접촉하는 피(被)접촉체와, 상기 보조 레일에 대하여 상기 경로 폭 방향으로 배열되는 상태로 위치하는 자석을 구비하고,
상기 경로 폭 방향에서의, 상기 제1 레일부의 측을 폭 방향 제1 측, 상기 제2 레일부의 측을 폭 방향 제2 측으로 하고,
상기 피접촉체는, 상기 물품 반송차가 상기 레일 분단 영역을 주행하는 편륜 주행(one wheeled running) 상태에서, 상기 안내 레일에 대하여 상기 폭 방향 제1 측으로부터 접촉하고,
상기 자석은, 상기 편륜 주행 상태에서, 상기 보조 레일에 대하여 상기 폭 방향 제2 측에 위치하는,
물품 반송 설비. - 제1항에 있어서,
상기 피접촉체 중 적어도 일부가, 상기 보조 레일의 상하 폭 내에 위치하고,
상기 안내 레일이, 비자성체에 의해 구성되고,
상기 자석의 자극면은, 상기 피접촉체의 외주면보다도 상기 보조 레일로부터 이격되어 있는, 물품 반송 설비. - 제2항에 있어서,
상기 피접촉체가, 상기 물품 반송차의 주행 방향으로 배열되는 상태로 2개 이상 설치되고,
상기 자석이, 상기 주행 방향으로 배열되는 상기 피접촉체의 사이에 설치되어 있는, 물품 반송 설비. - 제1항 내지 제3항 중 어느 한 항에 있어서,
상기 자석은, 상기 주행륜과 상기 제1 레일부가 접촉하는 접촉점에 대하여 상하 방향으로 가장 이격되어 있는 상기 피접촉체인 최(最)이격 피접촉체와 같은 높이 또는 상기 최이격 피접촉체보다도 상기 접촉점에 대하여 상하 방향으로 이격된 높이에 설치되어 있는, 물품 반송 설비. - 제4항에 있어서,
상기 물품 반송차는, 상기 피접촉체와 상기 자석을 연동시키는 연동부를 구비하고,
상기 연동부는, 상기 피접촉체가 상기 안내 레일에 대하여 상기 폭 방향 제1 측으로 이동함에 따라서, 상기 자석을 상기 보조 레일에 대하여 상기 폭 방향 제2 측으로 이동시키는, 물품 반송 설비.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2017-015692 | 2017-01-31 | ||
| JP2017015692A JP6677187B2 (ja) | 2017-01-31 | 2017-01-31 | 物品搬送設備 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| KR20200067256A true KR20200067256A (ko) | 2020-06-12 |
| KR102413956B1 KR102413956B1 (ko) | 2022-06-27 |
Family
ID=63017117
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020180010505A KR102413956B1 (ko) | 2017-01-31 | 2018-01-29 | 물품 반송 설비 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6677187B2 (ko) |
| KR (1) | KR102413956B1 (ko) |
| CN (1) | CN108373022B (ko) |
| TW (1) | TWI728223B (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SG11202105601SA (en) * | 2018-11-28 | 2021-06-29 | Murata Machinery Ltd | Traveling vehicle system |
| JP7103265B2 (ja) * | 2019-02-21 | 2022-07-20 | 株式会社ダイフク | 天井搬送車 |
| CN109785544B (zh) * | 2019-03-05 | 2021-08-20 | 陕西财经职业技术学院 | 一种无人超市自动收银用自动扫码收款装置 |
| CN111332798B (zh) * | 2020-05-20 | 2020-09-29 | 山东万物生机械技术有限公司 | 一种可转弯的建筑玻璃输送装置及其工作方法 |
| JP7480797B2 (ja) | 2022-03-14 | 2024-05-10 | 村田機械株式会社 | 天井搬送車システム |
| CN116344423B (zh) * | 2023-05-29 | 2023-08-11 | 上海新创达半导体设备技术有限公司 | 基于无线供电的物料搬运天车及其控制方法 |
| CN117755748B (zh) * | 2024-02-01 | 2024-07-16 | 江苏威尔赛科技有限公司 | 一种物流轨道中的定位准确翻轨器 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09175388A (ja) * | 1995-12-27 | 1997-07-08 | Kito Corp | モノレール式天井搬送車 |
| KR20080062805A (ko) * | 2006-12-29 | 2008-07-03 | 엘지디스플레이 주식회사 | 반송 장치 |
| JP2011116313A (ja) | 2009-12-07 | 2011-06-16 | Daifuku Co Ltd | 物品搬送設備 |
| KR101686053B1 (ko) * | 2015-12-07 | 2016-12-13 | 비앤에스(주) | 레일 전환 모듈 |
| JP2018064024A (ja) * | 2016-10-12 | 2018-04-19 | 株式会社ダイフク | 物品搬送設備 |
Family Cites Families (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5237672B2 (ko) * | 1972-02-02 | 1977-09-24 | ||
| JPS5398690A (en) * | 1977-02-04 | 1978-08-29 | Furukawa Electric Co Ltd:The | Continuous transportation apparatus using conveyor belt line |
| DE3323416A1 (de) * | 1982-06-30 | 1984-01-05 | Tsubakimoto Chain Co., Osaka | Foerdereinrichtung |
| JPS6063618A (ja) * | 1983-09-17 | 1985-04-12 | Tsubakimoto Chain Co | 無人走行車の走行制御方法 |
| JPH09305226A (ja) * | 1996-05-16 | 1997-11-28 | Shinko Electric Co Ltd | 走行台車装置 |
| JP3575925B2 (ja) * | 1996-10-04 | 2004-10-13 | アシスト シンコー株式会社 | 分岐軌道を備えた搬送設備 |
| US6629502B2 (en) * | 2000-09-14 | 2003-10-07 | Daifuku Co., Ltd. | Conveyance system |
| JP4265266B2 (ja) * | 2003-04-15 | 2009-05-20 | アシスト テクノロジーズ ジャパン株式会社 | 有軌道搬送装置 |
| JP4120877B2 (ja) * | 2003-12-26 | 2008-07-16 | 村田機械株式会社 | 有軌道台車システム |
| DE102008020052B4 (de) * | 2008-04-22 | 2010-10-07 | Ceratis Gmbh | Werkstückträgereinrichtung sowie Fördersystem |
| JP5686501B2 (ja) * | 2009-03-27 | 2015-03-18 | 株式会社ダイフク | 物品搬送設備 |
| KR101049221B1 (ko) * | 2009-11-17 | 2011-07-13 | 한국기계연구원 | 리니어 인덕션 모터를 이용한 자기부상 반송장치 |
| JP5382470B2 (ja) * | 2010-11-04 | 2014-01-08 | 村田機械株式会社 | 搬送システム及び搬送方法 |
| JP5310784B2 (ja) * | 2011-05-16 | 2013-10-09 | 村田機械株式会社 | 有軌道台車システム |
| JP5527619B2 (ja) * | 2011-11-24 | 2014-06-18 | 株式会社ダイフク | 天井設置型の物品搬送設備 |
| JP5630661B2 (ja) * | 2011-12-19 | 2014-11-26 | 株式会社ダイフク | 天井設置型の物品搬送設備 |
| JP5590422B2 (ja) * | 2012-06-13 | 2014-09-17 | 株式会社ダイフク | 物品搬送設備 |
| KR101419358B1 (ko) * | 2012-12-26 | 2014-07-16 | 주식회사 에스에프에이 | 반송시스템 |
| KR101530028B1 (ko) * | 2013-10-18 | 2015-06-19 | 주식회사 에스에프에이 | 이송대차 시스템 |
| CN205114337U (zh) * | 2015-01-28 | 2016-03-30 | 机械科学研究总院(将乐)半固态技术研究所有限公司 | 自动导引子母车 |
| JP6168476B2 (ja) * | 2015-03-19 | 2017-07-26 | 村田機械株式会社 | 搬送台車と搬送台車システム |
| JP6278341B2 (ja) * | 2015-04-06 | 2018-02-14 | 株式会社ダイフク | 物品搬送設備 |
-
2017
- 2017-01-31 JP JP2017015692A patent/JP6677187B2/ja active Active
-
2018
- 2018-01-15 TW TW107101402A patent/TWI728223B/zh active
- 2018-01-29 KR KR1020180010505A patent/KR102413956B1/ko active IP Right Grant
- 2018-01-31 CN CN201810094690.XA patent/CN108373022B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09175388A (ja) * | 1995-12-27 | 1997-07-08 | Kito Corp | モノレール式天井搬送車 |
| KR20080062805A (ko) * | 2006-12-29 | 2008-07-03 | 엘지디스플레이 주식회사 | 반송 장치 |
| JP2011116313A (ja) | 2009-12-07 | 2011-06-16 | Daifuku Co Ltd | 物品搬送設備 |
| KR101686053B1 (ko) * | 2015-12-07 | 2016-12-13 | 비앤에스(주) | 레일 전환 모듈 |
| JP2018064024A (ja) * | 2016-10-12 | 2018-04-19 | 株式会社ダイフク | 物品搬送設備 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN108373022B (zh) | 2021-05-18 |
| KR102413956B1 (ko) | 2022-06-27 |
| TWI728223B (zh) | 2021-05-21 |
| CN108373022A (zh) | 2018-08-07 |
| JP6677187B2 (ja) | 2020-04-08 |
| TW201831383A (zh) | 2018-09-01 |
| JP2018122700A (ja) | 2018-08-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20200067256A (ko) | 물품 반송 설비 | |
| TWI772404B (zh) | 物品搬送設備 | |
| TWI687368B (zh) | 物品搬送設備 | |
| KR102031806B1 (ko) | 물품 반송 설비 | |
| JP5477651B2 (ja) | 物品搬送設備 | |
| JP6613941B2 (ja) | 物品搬送設備 | |
| KR20160134508A (ko) | 물품 반송 설비 | |
| US8607709B2 (en) | Intersection navigation system | |
| KR102575953B1 (ko) | 자기 부상 이송 장치 | |
| JP2002087250A (ja) | 搬送設備 | |
| KR20200102341A (ko) | 천장 반송차 | |
| KR20140141827A (ko) | 반송대차 및 이를 이용하는 반송시스템 | |
| JP6717243B2 (ja) | 物品搬送設備 | |
| KR101407418B1 (ko) | 반송 시스템 | |
| JP4240758B2 (ja) | 搬送設備 | |
| KR101419358B1 (ko) | 반송시스템 | |
| KR20140014528A (ko) | 반송 시스템 | |
| JPH09252504A (ja) | 磁気浮上式搬送装置 | |
| WO2018139098A1 (ja) | 物品移載装置 | |
| JP5344366B2 (ja) | 搬送システム | |
| JP5917443B2 (ja) | 無人搬送車 | |
| JP6683140B2 (ja) | 搬送設備 | |
| JPH08163712A (ja) | 磁気浮上式搬送装置 | |
| JP2023108873A (ja) | 物品搬送設備 | |
| JPH11243606A (ja) | 有軌道台車システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E701 | Decision to grant or registration of patent right | ||
| GRNT | Written decision to grant |