KR20170108074A - 주차 지원 장치 및 주차 지원 방법 - Google Patents
주차 지원 장치 및 주차 지원 방법 Download PDFInfo
- Publication number
- KR20170108074A KR20170108074A KR1020177023611A KR20177023611A KR20170108074A KR 20170108074 A KR20170108074 A KR 20170108074A KR 1020177023611 A KR1020177023611 A KR 1020177023611A KR 20177023611 A KR20177023611 A KR 20177023611A KR 20170108074 A KR20170108074 A KR 20170108074A
- Authority
- KR
- South Korea
- Prior art keywords
- coil
- coils
- power
- vehicle
- magnetic flux
- Prior art date
Links
Images













Classifications
-
- B60L11/1829—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
- B60L50/60—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells using power supplied by batteries
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/35—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles
- B60L53/38—Means for automatic or assisted adjustment of the relative position of charging devices and vehicles specially adapted for charging by inductive energy transfer
-
- B60L11/182—
-
- B60L11/1846—
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
- B60L3/0023—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train
- B60L3/0038—Detecting, eliminating, remedying or compensating for drive train abnormalities, e.g. failures within the drive train relating to sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L50/00—Electric propulsion with power supplied within the vehicle
- B60L50/50—Electric propulsion with power supplied within the vehicle using propulsion power supplied by batteries or fuel cells
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
- B60L53/122—Circuits or methods for driving the primary coil, e.g. supplying electric power to the coil
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/10—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles characterised by the energy transfer between the charging station and the vehicle
- B60L53/12—Inductive energy transfer
- B60L53/126—Methods for pairing a vehicle and a charging station, e.g. establishing a one-to-one relation between a wireless power transmitter and a wireless power receiver
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/30—Constructional details of charging stations
- B60L53/305—Communication interfaces
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/65—Monitoring or controlling charging stations involving identification of vehicles or their battery types
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L53/00—Methods of charging batteries, specially adapted for electric vehicles; Charging stations or on-board charging equipment therefor; Exchange of energy storage elements in electric vehicles
- B60L53/60—Monitoring or controlling charging stations
- B60L53/66—Data transfer between charging stations and vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/168—Driving aids for parking, e.g. acoustic or visual feedback on parking space
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02J—CIRCUIT ARRANGEMENTS OR SYSTEMS FOR SUPPLYING OR DISTRIBUTING ELECTRIC POWER; SYSTEMS FOR STORING ELECTRIC ENERGY
- H02J50/00—Circuit arrangements or systems for wireless supply or distribution of electric power
- H02J50/90—Circuit arrangements or systems for wireless supply or distribution of electric power involving detection or optimisation of position, e.g. alignment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60L—PROPULSION OF ELECTRICALLY-PROPELLED VEHICLES; SUPPLYING ELECTRIC POWER FOR AUXILIARY EQUIPMENT OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRODYNAMIC BRAKE SYSTEMS FOR VEHICLES IN GENERAL; MAGNETIC SUSPENSION OR LEVITATION FOR VEHICLES; MONITORING OPERATING VARIABLES OF ELECTRICALLY-PROPELLED VEHICLES; ELECTRIC SAFETY DEVICES FOR ELECTRICALLY-PROPELLED VEHICLES
- B60L3/00—Electric devices on electrically-propelled vehicles for safety purposes; Monitoring operating variables, e.g. speed, deceleration or energy consumption
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/7072—Electromobility specific charging systems or methods for batteries, ultracapacitors, supercapacitors or double-layer capacitors
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/12—Electric charging stations
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/14—Plug-in electric vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T90/00—Enabling technologies or technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02T90/10—Technologies relating to charging of electric vehicles
- Y02T90/16—Information or communication technologies improving the operation of electric vehicles
Abstract
저렴한 구성으로 송전 코일과 수전 코일의 위치 어긋남을 검출할 수 있는 주차 지원 장치를 제공한다. 지상측의 송전 코일(20)과 차량(1)측의 수전 코일(10) 사이에서 비접촉으로 급전하는 비접촉 급전 시스템에 사용하는 주차 지원 장치이며, 차량(1)의 평면에서 볼 때 한 방향을 따라서 배열되어, 송전 코일(20)로부터 발생되는 차량(1)의 높이 방향의 자속을 검출하는 적어도 3개 이상의 코일(31 내지 33)과, 3개 이상의 코일(31 내지 33)에 의해 검출된 차량(1)의 높이 방향의 자속의 저하에 기초하여, 한 방향에 있어서의 송전 코일(20)과 수전 코일(10)의 위치 어긋남을 검출하는 어긋남 검출부(11)를 구비한다.
Description
본 발명은 주차 지원 장치 및 주차 지원 방법에 관한 것이다.
종래, 배터리를 구비하는 차량에 비접촉으로 전력을 공급하고, 해당 배터리를 충전하는 비접촉 급전 시스템이 알려져 있다. 비접촉 급전 시스템에 있어서는, 지상측의 송전 코일과 차량측의 수전 코일의 위치를 일치(대향)시켜 충전이 행해진다. 송전 코일에 대해 수전 코일의 위치를 일치(대향)시키기 위하여, 카메라를 이용하여 송전 코일과 수전 코일의 위치 관계를 산출함으로써, 송전 코일과 수전 코일의 위치 어긋남을 검출하는 방법이 알려져 있다(특허문헌 1 참조).
그러나, 특허문헌 1에 기재된 방법에서는, 송전 코일과 수전 코일의 위치 관계를 산출하기 위하여 카메라를 이용하고 있어, 고가이다.
본 발명은 상기 과제를 감안하여 이루어진 것으로서, 그 목적은, 저렴한 구성으로 송전 코일과 수전 코일의 위치 어긋남을 검출할 수 있는 주차 지원 장치 및 주차 지원 방법을 제공하는 것이다.
본 발명의 일 형태에 관한 주차 지원 장치 및 주차 지원 방법은, 지상측의 송전 코일과 차량측의 수전 코일 사이에서 비접촉으로 급전하는 비접촉 급전 시스템에 사용하는 것으로서, 차량의 평면에서 볼 때 한 방향을 따라서 배열된 3개 이상의 코일을 사용하여, 송전 코일로부터 발생되는 차량의 높이 방향의 자속을 검출하고, 3개 이상의 코일에 의해 검출된 차량의 높이 방향의 자속의 저하에 기초하여, 한 방향에 있어서의 송전 코일과 수전 코일의 위치 어긋남을 검출하는 것을 특징으로 한다.
본 발명에 따르면, 저렴한 구성으로 송전 코일과 수전 코일의 위치 어긋남을 검출할 수 있는 주차 지원 장치 및 주차 지원 방법이 제공된다.
도 1은 제1 실시 형태에 관한 주차 지원 장치의 구성의 일례를 나타내는 블록도.
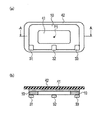
도 2의 (a)는, 제1 실시 형태에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 2의 (b)는 도 2의 (a)의 A-A 절단면의 단면도.
도 3의 (a) 내지 도 3의 (c)는, 제1 실시 형태에 관한 송전 코일에 수전 코일이 접근했을 때의 자속 변화를 나타내는 개략도.
도 4의 (a) 내지 도 4의 (c)는, 제1 실시 형태에 관한 수전 코일과 송전 코일의 위치 관계 및 높이 방향의 자속의 변화를 나타내는 개략도.
도 5의 (a) 내지 도 5의 (c)는, 제1 실시 형태에 관한 수전 코일, 서브 코일 및 송전 코일의 위치 관계, 그리고 높이 방향의 자속의 변화를 나타내는 개략도.
도 6은 제1 실시 형태에 관한 주차 지원 방법의 일례를 나타내는 흐름도.
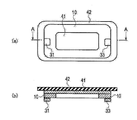
도 7의 (a)는, 제1 실시 형태의 제1 변형예에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 7의 (b)는 도 7의 (a)의 A-A 절단면의 단면도.
도 8은 제1 실시 형태의 제2 변형예에 관한 수전 코일 주변의 일례를 나타내는 단면도.
도 9의 (a)는, 제2 실시 형태에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 9의 (b)는 도 9의 (a)의 A-A 절단면의 단면도.
도 10의 (a) 내지 도 10의 (e)는, 제2 실시 형태에 관한 수전 코일, 서브 코일 및 송전 코일의 위치 관계, 그리고 높이 방향의 자속의 변화를 나타내는 개략도.
도 11은 제2 실시 형태에 관한 주차 지원 방법의 일례를 나타내는 흐름도.
도 12는, 도 11의 스텝 S208의 상세를 나타내는 흐름도.
도 13은, 도 11의 스텝 S210의 상세를 나타내는 흐름도.
도 14는, 도 11의 스텝 S212의 상세를 나타내는 흐름도.
도 15는, 도 11의 스텝 S213의 상세를 나타내는 흐름도.
도 2의 (a)는, 제1 실시 형태에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 2의 (b)는 도 2의 (a)의 A-A 절단면의 단면도.
도 3의 (a) 내지 도 3의 (c)는, 제1 실시 형태에 관한 송전 코일에 수전 코일이 접근했을 때의 자속 변화를 나타내는 개략도.
도 4의 (a) 내지 도 4의 (c)는, 제1 실시 형태에 관한 수전 코일과 송전 코일의 위치 관계 및 높이 방향의 자속의 변화를 나타내는 개략도.
도 5의 (a) 내지 도 5의 (c)는, 제1 실시 형태에 관한 수전 코일, 서브 코일 및 송전 코일의 위치 관계, 그리고 높이 방향의 자속의 변화를 나타내는 개략도.
도 6은 제1 실시 형태에 관한 주차 지원 방법의 일례를 나타내는 흐름도.
도 7의 (a)는, 제1 실시 형태의 제1 변형예에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 7의 (b)는 도 7의 (a)의 A-A 절단면의 단면도.
도 8은 제1 실시 형태의 제2 변형예에 관한 수전 코일 주변의 일례를 나타내는 단면도.
도 9의 (a)는, 제2 실시 형태에 관한 수전 코일 주변의 일례를 나타내는 하면도이며, 도 9의 (b)는 도 9의 (a)의 A-A 절단면의 단면도.
도 10의 (a) 내지 도 10의 (e)는, 제2 실시 형태에 관한 수전 코일, 서브 코일 및 송전 코일의 위치 관계, 그리고 높이 방향의 자속의 변화를 나타내는 개략도.
도 11은 제2 실시 형태에 관한 주차 지원 방법의 일례를 나타내는 흐름도.
도 12는, 도 11의 스텝 S208의 상세를 나타내는 흐름도.
도 13은, 도 11의 스텝 S210의 상세를 나타내는 흐름도.
도 14는, 도 11의 스텝 S212의 상세를 나타내는 흐름도.
도 15는, 도 11의 스텝 S213의 상세를 나타내는 흐름도.
도면을 참조하여, 제1 및 제2 실시 형태를 설명한다. 도면의 기재에서 동일 부분에는 동일 부호를 부여하고 설명을 생략한다.
(제1 실시 형태)
본 발명의 제1 실시 형태에 관한 주차 지원 장치는, 도 1에 도시된 바와 같이, 지상측의 송전 코일(20)을 포함하는 송전 장치와, 차량(1)측의 수전 코일(10)을 포함하는 수전 장치 사이에서 비접촉으로 급전하는 비접촉 급전 시스템에 적용된다. 본 발명의 제1 실시 형태에 관한 주차 지원 장치는, 차량(1)의 평면에서 볼 때 한 방향을 따라서 배열되어, 송전 코일(20)로부터 발생되는 차량(1)의 높이 방향의 자속을 검출하는 3개의 코일(서브 코일)(31 내지 33)과, 3개의 코일(서브 코일)(31 내지 33)에 의해 검출된 차량(1)의 높이 방향의 자속의 저하에 기초하여, 한 방향에 있어서의 송전 코일(20)과 수전 코일(10)의 위치 어긋남을 검출하는 차량 컨트롤러(어긋남 검출부)(11)를 구비한다.
지상측의 송전 장치는, 주차 스페이스 등의 지면에 설치된 송전 코일(20)과, 송전 코일(20)에 접속된 전원 박스(2)를 구비한다. 전원 박스(2)는, 송전 코일(20)에 전류를 통전하여 여자하는 파워 유니트(21)와, 파워 유니트(21)의 작동을 제어하는 지상 컨트롤러(22)와, 차량(1)측의 수전 장치 사이에서 무선 통신을 행하는 통신부(23)를 구비한다. 지상 컨트롤러(22)는, 예를 들어 중앙 연산 처리 장치(CPU)나, RAM, ROM, 하드 디스크 등의 기억 수단을 포함하는 일체형의 컴퓨터로서 구성할 수 있다.
차량(1)측의 수전 장치는, 수전 코일(10), 정류 평활 회로(12), 차량 컨트롤러(11), 배터리(전기 부하)(13), 통신부(14) 및 출력부(휴먼 머신 인터페이스(HMI))(15)를 구비한다. 수전 코일(10)은, 차량(1)이 주차 스페이스의 소정 위치에 주차되었을 때에, 송전 코일(20)과 대향하는 위치가 되도록, 차량(1)의 저부 적절한 위치에 배치되어 있다. 수전 코일(10)은, 수신된 전력을 배터리(13)에 공급한다.
정류 평활 회로(12)는, 수전 코일(10)에 의해 수신되는 교류 전압을 직류화하면서, 또한 평활화한다. 배터리(13)는, 수전 코일(10)에 의해 수신된 전압을 충전한다. 차량 컨트롤러(11)는, 정류 평활 회로(12)의 작동을 제어한다. 차량 컨트롤러(11)는, 예를 들어 중앙 연산 처리 장치(CPU)나, RAM, ROM, 하드 디스크 등의 기억부를 포함하는 일체형의 컴퓨터로서 구성할 수 있다. 통신부(14)는, 전원 박스(2) 사이에서 통신을 행한다. 출력부(15)는, 내비게이션 장치 등의 액정 디스플레이나, 스피커, 램프 등으로 구성된다.
서브 코일(31 내지 33)은, 차량(1)이 이동하여 주차 스페이스의 소정 위치에 정차할 때까지의 사이, 송전 코일(20)로부터 발생된 차량(1)의 높이 방향의 자속을 검출하고, 전자 신호로서, 차량 컨트롤러(11)에 출력한다.
도 2의 (a) 및 도 2의 (b)에 도시된 바와 같이, 수전 코일(10)의 상부에는, 페라이트 등의 자성 부재(41)가 배치되고, 자성 부재(41)의 상면은 케이스(42)에 설치되어 있다. 수전 코일(10)의 형상은, 예를 들어 대략 직사각형이며, 환상으로 권회되어 있다.
서브 코일(31 내지 33)은, 수전 코일(10)의 하방에, 차폭 방향으로 일렬로 배치되어 있다. 서브 코일(32)은, 차폭 방향의 중앙 위치에 배치되어 있다. 2개의 서브 코일(31, 33)은, 서브 코일(32)을 사이에 끼워 등간격으로, 대칭 위치에 배치되어 있다. 서브 코일(31 내지 33)은, 수전 코일(10)의 중심 P1에 대해 차량(1)의 후방측(도 2의 (a)의 지면을 향하여 하측 방향)에 배치되어 있지만, 차량(1)의 전방측(도 2의 (a)의 지면을 향하여 상측 방향)에 배치되어 있어도 된다. 서브 코일(31 내지 33)의 형상이나 사이즈는, 송전 코일(20)로부터 발생된 차량(1)의 높이 방향의 자속을 검출 가능하면, 특별히 한정되지 않는다.
다음에, 도 3의 (a) 내지 도 3의 (c)를 이용하여, 수전 코일(10)이 송전 코일(20)에 접근했을 때의 송전 코일(20)로부터 발생되는 자속의 변화에 대해 설명한다. 도 3의 (a)는, 수전 코일(10)이 송전 코일(20)에 접근하지 않은 경우, 도 3의 (b)는 수전 코일(10)이 송전 코일(20)에 접근한 경우, 도 3의 (c)는 수전 코일(10)과 송전 코일(20)의 위치가 일치(대향)한 모습을 나타내고 있다. 또한, 송전 코일(20)의 형상은, 평면에서 볼 때 예를 들어 대략 직사각형(정사각형)이며, 환상으로 권회되어 있다.
도 3의 (a) 내지 도 3의 (c)에 도시된 바와 같이, 수전 코일(10)이 송전 코일(20)에 접근해 가면, 송전 코일(20)에서 발생된 자속은, 자성 부재(41)로부터 발생된 자장의 영향을 받아 복잡하게 변화한다. 예를 들어, 도 3의 (b)의 영역 A1, A2에서의 자속이, 자기 저항이 더 낮게 루프할 수 있는 경로가 되도록 변화한다.
한편, 도 3의 (b)에 나타내는 송전 코일(20) 상부의 영역 A0의 자속은, 수전 코일(10)에 도달하지 않고, 수전 코일(10) 바로 아래에서 단락(유턴)하는 루프를 갖고 있다. 이 영역 A0에서의 자속은, 송전 코일(20)의 외주 방향을 향하고 있고, 차량(1)의 높이 방향(연직 방향)의 자속은 제로에 가깝다. 또한, 이 영역 A0에서의 자속은, 이미 자기 저항이 낮은 경로로 되어 있기 때문에, 수전 코일(10)이 송전 코일(20)에 접근해 왔다고 해도, 자성 부재(41)의 영향을 받기 어렵다. 이와 같이, 송전 코일(20)의 내측 근방의 상부에는, 높이 방향의 자속 갭이 존재한다.
도 4의 (a) 내지 도 4의 (c)는, 본 발명의 제1 실시 형태에 관한 수전 코일(10)과 송전 코일(20)의 위치 관계와, 수전 코일(10)의 하부에서의 높이 방향의 자속의 변화를 나타낸다. 도 4의 (a)는, 수전 코일(10)의 중심 P1과 송전 코일(20)의 중심 P0가 차폭 방향으로 일치하고 있어 위치 어긋남이 없는 경우, 도 4의 (b)는, 송전 코일(20)에 대해 수전 코일(10)이 진행 방향에 대해 우측으로 어긋나 있는 경우, 도 4의 (c)는, 도 4의 (b)보다도 더 송전 코일(20)에 대해 수전 코일(10)이 진행 방향에 대해 우측으로 어긋나 있는 모습을 나타내고 있다. 도 4의 (a) 내지 도 4의 (c)의 지면을 향하여 상측 방향이, 차량(1)의 진행 방향을 나타낸다. 또한, 도 4의 (a) 내지 도 4의 (c)에 있어서 편의적으로, 수전 코일(10)의 중심 P1을 통과하여, 차량(1)의 진행 방향에 평행한 직선 L0을 나타낸다.
도 4의 (a) 내지 도 4의 (c)에 도시된 바와 같이, 수전 코일(10)과 송전 코일(20)의 위치 관계가 변화해도, 송전 코일(20)의 약간 내측 근방에는, 높이 방향의 자속이 낮은 영역 A11, A12, A13이 존재한다. 그래서, 본 발명의 제1 실시 형태에서는, 송전 코일(20)의 약간 내측 근방의 상부에서 높이 방향의 자속의 저하부가 있음을 이용하여, 송전 코일(20)과 수전 코일(10)의 위치 어긋남을 검출한다.
서브 코일(31 내지 33)의 배치 위치는, 송전 코일(20)의 형상 및 사이즈 등에 따라 적절히 설정된다. 도 5의 (a) 내지 도 5의 (c)는 도 4의 (a) 내지 도 4의 (c)에 대해, 3개의 서브 코일(31 내지 33)을 배치된 일례를 나타낸다. 도 5의 (a)에 도시된 바와 같이, 중앙의 서브 코일(32)은, 수전 코일(10)과 송전 코일(20)이 차폭 방향으로 일치했을 때에, 차폭 방향으로 송전 코일(20)의 중심 P0에 일치하는 위치에 배치된다. 또한, 양단의 서브 코일(31, 33)은, 송전 코일(20)과 수전 코일(10)의 위치가 일치했을 때에, 송전 코일(20)의 약간 내측 근방, 즉 높이 방향의 자속의 저하부와 겹치도록 배치된다.
도 5의 (b)에 도시된 바와 같이, 송전 코일(20)에 대해 수전 코일(10)이 우측으로 어긋나 있는 경우에는, 3개의 서브 코일(31 내지 33)의 모두가 자속의 저하부에 겹치지 않는 위치에 있다. 도 5의 (c)에 도시된 바와 같이, 송전 코일(20)에 대해 수전 코일(10)이 더 우측으로 어긋나 있는 경우, 중앙의 서브 코일(32)이 높이 방향의 자속의 저하부에 겹쳐져서, 양단의 서브 코일(31, 33)이 높이 방향의 자속의 저하부에 겹치지 않는 위치에 있다.
도 1에 도시된 차량 컨트롤러(어긋남 검출부)(11)는, 3개의 서브 코일(31 내지 33)에 의해 검출된 차량(1)의 높이 방향의 자속의 저하에 기초하여, 서브 코일(31 내지 33)의 배열 방향(차폭 방향)에 있어서의 송전 코일(20)과 수전 코일(10)의 위치 어긋남을 검출한다. 이 때, 차량 컨트롤러(11)는, 서브 코일(31 내지 33)에 의해 검출된 전압에 대해 실효값 처리를 행함으로써 높이 방향의 자속에 따른 전압을 얻고, 위치 어긋남의 검출 처리를 행한다.
예를 들어, 도 5의 (a)에 도시하는 바와 같이 송전 코일(20)과 수전 코일(10)의 위치가 차폭 방향으로 일치한 경우, 차량 컨트롤러(11)는, 양단의 서브 코일(31, 33)에 의해 검출된 높이 방향의 자속이 제1 임계값(제로 판정 임계값) 이하이면서, 또한 중앙의 서브 코일(32)에 의해 검출된 높이 방향의 자속이 제2 임계값보다도 높다고 판정하고, 송전 코일(20)과 수전 코일(10)의 차폭 방향의 위치 어긋남이 없다고 판정한다.
여기서, 제1 임계값(제로 판정 임계값)은, 높이 방향의 자속의 저하부를 식별하기 위하여 설정된 것이며, 높이 방향의 자속의 저하부에 있어서의 자속 밀도 등에 따라 적절히 설정된다. 제2 임계값은, 제1 임계값 이상(환언하면, 제1 임계값과 동일값 또는 제1 임계값보다도 높은 값)으로 적절히 설정된다. 제1 및 제2의 임계값은, 예를 들어 미리 설정되어 차량 컨트롤러(11)의 메모리에 기억되어 있다.
한편, 도 5의 (b) 및 도 5의 (c)에 도시된 바와 같은 송전 코일(20)과 수전 코일(10)의 위치 관계에 있는 경우, 차량 컨트롤러(11)는, 양단의 서브 코일(31, 33)에 의해 검출된 자속 중 적어도 어느 것이 제1 임계값(제로 판정 임계값)보다 높다고 판정하고, 송전 코일(20)과 수전 코일(10)의 차폭 방향의 위치 어긋남이 있다고 판정한다. 또한, 도 5의 (c)에 도시된 바와 같은 송전 코일(20)과 수전 코일(10)의 위치 관계에 있는 경우, 차량 컨트롤러(11)는, 중앙의 서브 코일(32)에 의해 검출된 자속이 제2 임계값 미만이라고 판정하고, 송전 코일(20)과 수전 코일(10)의 차폭 방향의 위치 어긋남이 있다고 판정한다.
도 1에 도시된 출력부(15)는, 차량 컨트롤러(11)에 의해 검출된 송전 코일(20)과 수전 코일(10)의 위치 어긋남 유무나 위치 어긋남의 방향 등의 검출 결과를, 표시나 음성 등에 의해 유저에게 통지한다. 유저는, 출력부(15)의 통지에 의해, 송전 코일(20)과 수전 코일(10)의 위치 어긋남 유무나 위치 어긋남의 방향 등을 인식할 수 있다.
다음에, 도 6의 흐름도를 참조하면서, 본 발명의 제1 실시 형태에 관한 주차 지원 방법(위치 어긋남 검출 방법)의 일례를 설명한다.
스텝 S101에서, 차량(1)이 주차 스페이스에 접근할 때에 서브 코일(31 내지 33)에 의해 전압 V1t 내지 V3t가 검출되고, 전자 신호로서 차량 컨트롤러(11)에 출력된다. 스텝 S102에서, 지상측으로부터의 여자를 받을 때에, 차량 컨트롤러(11)는, 전압 V1t 내지 V3t에 대해 실효값 처리를 행하고, 높이 방향의 자속에 따른 전압 V1 내지 V3을 얻는다.
스텝 S103에서, 차량 컨트롤러(11)가, 전압 V1 내지 V3 중 적어도 하나 이상이 제로 판정 임계값 V0보다 높은지 여부를 판정한다. 전압 V1 내지 V3의 모두가 제로 판정 임계값 V0 이하로 판정된 경우, 스텝 S104로 이행하고, 출력부(15)가, 송전 코일(20)이 수전 코일(10)의 근처에 없음을 유저에게 통지한다. 한편, 스텝 S103에서, 차량 컨트롤러(11)에 의해, 전압 V1 내지 V3 중 적어도 하나 이상이 제로 판정 임계값보다 높다고 판정된 경우, 스텝 S105로 이행하고, 출력부(15)가, 송전 코일(20)이 수전 코일(10)의 근처에 있음을 먼저 유저에게 통지한다.
스텝 S106에서, 차량 컨트롤러(11)가, 전압 V1, V3이 제로 판정 임계값(제1 임계값) V0 이하인지의 여부를 판정함과 함께, 전압 V2가 제로 판정 임계값(제2 임계값) V0보다 이상인지 여부를 판정한다. 예를 들어, 도 5의 (a)에 도시된 바와 같은 위치 관계에 있기 때문에, 전압 V1, V3이 제로 판정 임계값 V0 이하이면서, 또한 전압 V2가 제로 판정 임계값 V0보다 높다고 판정된 경우, 스텝 S107로 이행한다. 스텝 S107에서, 출력부(15)가, 차폭 방향으로 수전 코일(10)과 송전 코일(20)의 위치가 일치한다(위치 어긋남이 없다)는 것을 유저에게 통지한다.
한편, 스텝 S106에서, 예를 들어 도 5의 (b) 또는 도 5의 (c)에 도시된 바와 같은 위치 관계에 있기 때문에, 전압 V1, V3 중 적어도 어느 것이 제로 판정 임계값 V0보다도 높다고 판정된 경우, 또는 예를 들어 도 5의 (c)에 도시된 바와 같은 위치 관계에 있기 때문에, 전압 V2가 제로 판정 임계값 V0 이하로 판정된 경우에는, 스텝 S108로 이행한다. 스텝 S108에서, 출력부(15)가, 차폭 방향으로 수전 코일(10)과 송전 코일(20)의 위치 어긋남이 있음을 유저에게 통지한다.
이상 설명한 바와 같이, 본 발명의 제1 실시 형태에 따르면, 송전 코일(20)의 약간 내측 근방의 상부에서의 자속의 단락 현상을 이용하여, 높이 방향의 자속의 저하에 기초하여 위치 어긋남을 검출함으로써, 저렴한 구성으로, 송전 코일(20)과 수전 코일(10)의 위치 어긋남을 검출할 수 있다.
또한, 적어도 3개의 서브 코일(31 내지 33)을 차폭 방향으로 배치하여 위치 어긋남을 검출함으로써, 차폭 방향의 위치 어긋남을 검출할 수 있다. 또한, 서브 코일(31 내지 33)을, 수전 코일(10)의 하방에, 수전 코일(10)의 중심보다도 차량(1)의 전방측 또는 후방측의 위치에서 차폭 방향으로 배열함으로써, 서브 코일(31 내지 33)이 배열된 측으로부터 주차 위치에 진입했을 때에, 차폭 방향의 위치 어긋남을 신속하게 검출할 수 있다.
(제1 변형예)
본 발명의 제1 실시 형태에서는, 높이 방향의 자속을 검출하기 위한 3개의 서브 코일(31 내지 33)을 이용하는 경우를 설명했지만, 본 발명의 제1 변형예로서, 중앙의 서브 코일(32) 대신에 수전 코일(10)을 이용하여 위치 어긋남을 검출하는 경우를 설명한다.
제1 변형예에 있어서는, 도 7의 (a) 및 도 7의 (b)에 도시된 바와 같이, 2개의 서브 코일(31, 33)이, 차폭 방향으로 수전 코일(10)을 사이에 끼워 일렬로 배열되어 있다. 수전 코일(10)은, 송전 코일(20)로부터의 전력을 수전하는 기능을 가짐과 함께, 제1 실시 형태에서의 중앙의 서브 코일(32)과 마찬가지의 기능을 겸한다. 즉, 수전 코일(10)은, 송전 코일(20)로부터 발생되는 높이 방향의 자속을 검출하고, 전자 신호로서 차량 컨트롤러(11)에 출력된다.
제1 변형예에 의하면, 2개의 서브 코일(31, 33)과 함께 수전 코일(10)을 이용하여 높이 방향의 자속을 검출함으로써, 제1 실시 형태와 마찬가지로 위치 어긋남의 유무를 검출할 수 있음과 함께, 높이 방향의 자속을 검출하기 위한 서브 코일(31, 33)의 개수를 삭감할 수 있다.
(제2 변형예)
본 발명의 제1 실시 형태에서는, 서브 코일(31 내지 33)이 수전 코일(10)의 하부에 접하여 배치되는 경우를 설명했지만, 본 발명의 제2 변형예로서, 서브 코일(31 내지 33)이 수전 코일(10)에 접하지 않은 경우를 설명한다.
본 발명의 제2 변형예에 있어서는, 도 8에 도시된 바와 같이, 수전 코일(10)을 덮는 수지제의 코일 커버(43)의 하면에 배치되어 있다. 서브 코일(31 내지 33)로서는, 배선을 부착해도 되고, 프린트 기판과 같은 도체 코일 모양도 사용 가능하다.
제2 변형예에 의하면, 서브 코일(31 내지 33)은, 수전 코일(10)과 접하지 않아도 되고, 수전 코일(10)의 하부 근방에서, 송전 코일(20)에 의해 발생되는 높이 방향의 자속의 저하를 검출 가능한 위치에 배치되어 있으면 된다.
(제2 실시 형태)
본 발명의 제2 실시 형태로서, 높이 방향의 자속을 검출하기 위한 5개의 코일을 배열하고, 위치 어긋남의 방향을 검출하는 경우를 설명한다. 본 발명의 제2 실시 형태에 관한 주차 지원 장치는, 도 9의 (a) 및 도 9의 (b)에 도시된 바와 같이, 5개의 서브 코일(31 내지 35)을 갖는다.
서브 코일(31 내지 35)은, 차량(1)의 평면에서 볼 때 차폭 방향으로 일렬로 배치되어 있다. 서브 코일(31 내지 35)은, 수전 코일(10)의 중심 P1에 대해 차량(1)의 후방측에 배치되어 있어도 되고, 차량(1)의 전방측에 배치되어 있어도 된다. 서브 코일(31 내지 35)은, 예를 들어 등간격으로 배치되어 있다. 중앙의 서브 코일(33)은, 차폭 방향으로 수전 코일(10)의 중심 P1과 일치하는 위치에 배치되어 있다. 서브 코일(32, 34)은, 중앙의 서브 코일(33)을 사이에 끼워 대칭 위치에 배치되어 있다. 양단의 서브 코일(31, 35)은, 서브 코일(32 내지 34)을 사이에 끼워 대칭 위치에 배치되어 있다.
서브 코일(31 내지 35)의 배치 위치는, 송전 코일(20)의 크기 및 형상 등에 따라 적절히 설정된다. 본 발명의 제2 실시 형태에서는, 수전 코일(10)과 송전 코일(20)의 차폭 방향의 위치가 일치하는 경우에, 양단의 서브 코일(31, 35)이 높이 방향의 자속의 저하부에 오도록 배치된다. 또한, 반드시 양단의 서브 코일(31, 35)이 높이 방향의 자속의 저하부에 배치되지는 않아도 되고, 예를 들어 서브 코일(31, 35)의 외측에 추가로 서브 코일이 하나씩 배치되어 있어도 된다.
도 10의 (a) 내지 도 10의 (e)에, 송전 코일(20)과 수전 코일(10)의 위치 관계와, 높이 방향의 자속의 변화와, 서브 코일(31 내지 35)의 배치예를 나타낸다. 도 10의 (a) 내지 도 10의 (e)에 있어서, 화살표 D0은 차량(1)의 진행 방향을 나타내고, 직선 L0은, 수전 코일(10)의 중심 P1을 통해, 차량(1)의 진행 방향에 평행인 직선이다.
도 10의 (a)에 도시된 바와 같이, 수전 코일(10)과 송전 코일(20)의 위치가 차폭 방향에 있어서 일치하는 경우, 양단의 서브 코일(31, 35)이 자속의 저하부에 오도록 배치되어 있다. 도 10의 (b) 내지 도 10의 (e)는, 송전 코일(20)에 대해 수전 코일(10)이 우측으로 어긋나 있는 모습을 각각 나타낸다. 도 10의 (b)에서는, 우측으로부터 2번째의 서브 코일(34)이 자속의 저하부에 겹치고, 도 10의 (c)에서는, 중앙의 서브 코일(33)이 자속의 저하부에 겹치고 있다.
본 발명의 제2 실시 형태에 있어서의, 도 1에 도시된 차량 컨트롤러(11)는, 5개의 서브 코일(31 내지 35)에 의해 검출된 자속의 저하부를 기점으로 하여, 위치 어긋남의 유무 이외에 위치 어긋남의 방향을 검출한다. 다른 구성은, 제1 실시 형태와 마찬가지이므로, 중복된 설명은 생략한다.
다음에, 도 11 내지 도 15의 흐름도를 참조하면서, 본 발명의 제2 실시 형태에 관한 주차 지원 방법(위치 어긋남 검출 방법)의 일례를 설명한다.
스텝 S201에서, 5개의 서브 코일(31 내지 35)에 의해 전압 V1t 내지 V5t를 계측하고, 차량 컨트롤러(11)에 출력한다. 스텝 S202에서, 지상측으로부터의 여자를 받을 때, 차량 컨트롤러(11)가, 서브 코일(31 내지 35)의 전압 V1t 내지 V5t에 대해 실효값 처리를 행하고, 높이 방향의 자속에 따른 전압 V1 내지 V5를 얻는다.
스텝 S203에서, 차량 컨트롤러(11)가, 전압 V1 내지 V5 중 적어도 하나 이상이, 제로 판정 임계값 V0보다 높은지 여부를 판정한다. 또한, 제로 판정 임계값 V0은, 자속의 저하부를 식별할 수 있는 값으로 적절히 설정되어 있다. 전압 V1 내지 V5의 모두가 제로 판정 임계값 V0 이하로 판정(제로 판정)된 경우, 스텝 S204로 이행하고, 출력부(15)가, 송전 코일(20)이 수전 코일(10) 부근에 없음을 유저에게 통지한다. 한편, 스텝 S203에서 전압 V1 내지 V5 중 적어도 하나 이상이 제로 판정 임계값 V0보다 높다고 판정되었을 때, 스텝 S205로 이행하고, 출력부(15)가, 수전 코일(10)이 송전 코일(20) 부근에 있음을 유저에게 통지한다.
스텝 S206에서, 차량 컨트롤러(11)가, 전압 V1 내지 V5 중 연속이 아닌 2개의 서브 코일에 대응하는 전압이 제로 판정 임계값 V0 이하인지의 여부를 판정한다. 예를 들어 도 10의 (a)에 도시된 바와 같은 위치 관계이기 때문에, 전압 V1 내지 V5 중 연속이 아닌 양단의 서브 코일(31, 35)에 대응하는 전압 V1, V5가, 제로 판정 임계값 V0 이하라고 판정(제로 판정)된 경우, 스텝 S207로 이행한다.
스텝 S207에서, 차량 컨트롤러(11)가, 제로 판정된 2개의 서브 코일(31, 35)에 끼워진 서브 코일(32 내지 34)의 전압 V2 내지 V4가 제로 판정 임계값 V0보다 높은지 여부를 판정한다. 끼워진 서브 코일(32 내지 34)의 전압이 제로 판정 임계값 V0보다 높다고 판정된 경우, 송전 코일(20)의 중심 P0은, 제로 판정된 2개의 서브 코일(31, 35)을 양단으로 하는 선의 이등분선 위에 있다고 판정되어, 스텝 S208로 이행한다.
스텝 S208의 상세를, 도 12의 흐름도를 참조하면서 설명한다. 스텝 S301에 서, 제로 판정된 2개의 서브 코일(31, 35)을 양단으로 하는 선의 이등분선이, 수전 코일(10)의 중심 P1을 지나는지 여부를 판정한다. 예를 들어, 도 10의 (a)에 도시된 바와 같은 위치 관계이며, 이등분선(직선 L0과 일치)이 수전 코일(10)의 중심 P1을 지난다고 판정된 경우, 스텝 S302로 이행하고, 출력부(15)가, 송전 코일(20)과 수전 코일(10)의 차폭 방향 좌우 어긋남이 없음을 유저에게 통지한다.
한편, 스텝 S301에서, 제로 판정된 2개의 서브 코일(31, 35)을 양단으로 하는 선의 이등분선이 수전 코일(10)의 중심 P1을 지나지 않는다고 판정된 경우, 스텝 S303으로 이행한다. 스텝 S303에서, 차량 컨트롤러(11)가, 당해 이등분선이 수전 코일(10)의 중심 P1의 진행 방향의 좌측을 지나는지 판정한다. 당해 이등분선이 수전 코일(10)의 중심 P1의 진행 방향의 좌측을 지난다고 판정된 경우, 스텝 S304로 이행하고, 출력부(15)가, 송전 코일(20)이 좌측으로 어긋나 있기 때문에, 좌측으로 핸들을 꺾도록 유저에게 통지한다. 한편, 당해 이등분선이 수전 코일(10)의 중심 P1의 진행 방향의 우측을 지난다고지나지우, 스텝 S305로 이행하고, 출력부(15)가, 송전 코일(20)이 우측으로 어긋나 있기 때문에, 우측으로 핸들을 꺾도록 유저에게 통지한다.
도 11로 돌아가서, 스텝 S206에서, 전압 V1 내지 V5 중 연속이 아닌 2개의 서브 코일에 대응하는 전압이 제로 판정 임계값 V0 이하가 아니라고 판정된 경우와, 스텝 S207에서, 제로 판정된 서브 코일 사이에 끼워진 서브 코일의 전압이 제로 판정 임계값 V0 이하로 판정된 경우에는, 스텝 S209로 이행한다.
스텝 S209에서, 차량 컨트롤러(11)가, 양단의 서브 코일(31, 35)의 전압 V1, V5 중 어느 것이 제로 판정 임계값 V0 이하인지 여부를 판정한다. 전압 V1, V5 중 어느 것이 제로 판정 임계값 V0 이하로 판정(제로 판정)된 경우, 스텝 S210으로 이행한다.
스텝 S210의 상세를 도 13의 흐름도를 참조하면서 설명한다. 스텝 S401에서, 차량 컨트롤러(11)가, 전압 V5가 제로 판정 임계값 V0 이하인지 여부를 판정한다. 예를 들어 도 10의 (d) 또는 도 10의 (e)에 도시된 바와 같은 위치 관계에 있기 때문에, 전압 V5가 제로 판정 임계값 V0 이하라고 판정된 경우, 스텝 S402로 이행한다. 스텝 S402에서, 출력부(15)가, 송전 코일(20)이 차량(1)의 진행 방향에 대해 좌측으로 어긋나 있기 때문에, 좌측으로 핸들을 꺾도록 유저에게 통지한다.
한편, 스텝 S401에서, 전압 V5가 제로 판정 임계값 V0보다 높다고(환언하면, 전압 V1이 제로 판정 임계값 V0 이하) 판정된 경우, 스텝 S403으로 이행한다. 스텝 S403에서, 출력부(15)가, 송전 코일(20)이 차량(1)의 진행 방향에 대해 우측으로 어긋나 있기 때문에, 우측으로 핸들을 꺾도록 유저에게 통지한다.
도 11로 돌아가서, 스텝 S209에서, 양단의 서브 코일(31, 35)의 전압 V1, V5의 어느 것도 제로 판정되지 않은 경우, 스텝 S211로 이행한다. 스텝 S211에서, 차량 컨트롤러(11)가, 중앙의 서브 코일(33)의 전압 V3이 제로 판정 임계값 V0 이하인지 여부를 판정한다. 전압 V3이 제로 판정 임계값 V0 이하로 판정(제로 판정)된 경우, 스텝 S212로 이행한다.
스텝 S212의 상세를, 도 14의 흐름도를 참조하면서 설명한다. 스텝 S501에 서, 차량 컨트롤러(11)가, 양단의 서브 코일(31, 35)의 전압 V1, V5를 서로 비교하여, 전압이 높은 측으로 송전 코일(20)이 어긋나 있다고 판정한다. 예를 들어, 도 10의 (c)에 도시된 바와 같은 위치 관계에 있고, 전압 V1이 전압 V5보다도 높다고 판정된 경우, 스텝 S502로 이행하고, 송전 코일(20)이 차량(1)의 진행 방향에 대해 좌측으로 어긋나 있기 때문에, 좌측으로 핸들을 꺾도록 유저에게 통지한다.
한편, 스텝 S501에서, 전압 V1이 전압 V5 이하로 판정된 경우, 스텝 S503으로 이행하고, 송전 코일(20)이 차량(1)의 진행 방향에 대해 우측으로 어긋나 있기 때문에, 우측으로 핸들을 꺾도록 유저에게 통지한다.
도 11로 돌아가서, 스텝 S211에서, 중앙의 서브 코일(33)의 전압 V3이 제로 판정 임계값 V0보다 높다고 판정된 경우에는, 단부도 중심도 아닌 서브 코일(32, 34)의 전압 V2, V4 중 어느 것인가가 제로 판정 임계값 V0 이하이기 때문에, 스텝 S213으로 이행한다.
스텝 S213의 상세를, 도 15의 흐름도를 참조하면서 설명한다. 여기서, 전압 V1 내지 V5 중 가장 높은 전압을 「Vtop」, 두번째로 높은 전압을 「Vsec」, 세번째로 높은 전압을 「Vthr」로 한다.
스텝 S601에서, 차량 컨트롤러(11)가, 가장 높은 전압 Vtop과 두번째로 높은 전압 Vsec의 전압차 Vtop-Vsec가 소정의 임계값 Vth보다 높은지 판정한다. 전압차 Vtop-Vsec가, 소정의 임계값 Vth보다 높은 경우, 스텝 S602로 이행하고, 가장 높은 전압 Vtop의 서브 코일의 측에 송전 코일(20)이 어긋나 있다(「Posi=1」이라고 함)고 판정한다. 한편, 스텝 S601에서 전압차 Vtop-Vsec가, 소정의 임계값 Vth 이하인 경우에는, 스텝 S603으로 이행한다.
스텝 S603에서, 차량 컨트롤러(11)가, 가장 높은 전압 Vtop과 세번째로 높은 전압 Vthr의 전압차 Vtop-Vthr가 소정의 임계값 Vth보다 높은지 여부를 판정한다. 전압차 Vtop-Vthr가 소정의 임계값 Vth보다 높다고 판정된 경우에는, 스텝 S602로 이행하고, 가장 높은 전압 Vtop의 서브 코일 측으로 송전 코일(20)이 어긋나 있다(Posi=1)고 판정한다. 한편, 스텝 S603에서, 전압차 Vtop-Vthr가 소정의 임계값 Vth 이하라고 판정된 경우에는, 스텝 S604로 이행하고, 세번째로 높은 전압 Vthr의 서브 코일 측으로 코일이 어긋나 있다(「Posi=2」이라고 함)고 판정한다.
스텝 S605에서, 전압 V2가 제로 판정 임계값 V0 이하인지 여부를 판정한다. 전압 V2가 제로 판정 임계값 V0 이하라 판정(제로 판정)된 경우, 스텝 S606으로 이행하고, 스텝 S602의 판정 결과가 「Posi=1」인지 여부를 판정한다. 「Posi=1」인 경우에는 스텝 S607로 이행하고, 「Posi=2」인 경우에는 스텝 S611로 이행한다. 스텝 S607에서, 전압 V1이 가장 높은 전압 Vtop인 경우에는 스텝 S608로 이행하고, 전압 V1이 가장 높은 전압 Vtop이 아닌 경우에는 스텝 S611로 이행한다.
스텝 S605에서, 전압 V2가 제로 판정 임계값 V0보다 높다고(환언하면, 전압 V4가 제로 판정 임계값 V0 이하) 판정된 경우, 스텝 S609로 이행하고, 「Posi=1」인 경우에는 스텝 S610으로 이행하고, 「Posi=2」인 경우에는 스텝 S608로 이행한다. 스텝 S610에서, 전압 V5가 가장 높은 전압 Vtop인 경우에는 스텝 S611로 이행하고, 전압 V5가 가장 높은 전압 Vtop이 아닌 경우에는 스텝 S608로 이행한다.
스텝 S608에서, 출력부(15)는, 송전 코일(20)이 차량(1)의 진행 방향에 대해 좌측으로 어긋나 있기 때문에, 좌측으로 핸들을 꺾도록 유저에게 통지한다. 스텝 S611에서, 출력부(15)는, 송전 코일(20)이 차량(1)의 진행 방향에 대해 우측으로 어긋나 있기 때문에, 우측으로 핸들을 꺾도록 유저에게 통지한다.
이상 설명한 바와 같이, 본 발명의 제2 실시 형태에 따르면, 5개 이상의 서브 코일(31 내지 35)을 이용하여 높이 방향의 자속을 검출하고, 차량 컨트롤러(11)가, 5개 이상의 서브 코일(31 내지 35)에 의해 검출된 자속에 기초하여 위치 어긋남을 검출함으로써, 위치 어긋남의 유무 이외에, 위치 어긋남의 방향을 검출할 수 있다.
또한, 적어도 5개의 서브 코일(31 내지 35)을 차폭 방향으로 배치하여 위치 어긋남을 검출함으로써, 차폭 방향의 위치 어긋남 방향을 검출할 수 있다. 또한, 서브 코일(31 내지 35)을, 수전 코일(10)의 하방에, 수전 코일(10)의 중심보다도 차량(1)의 전방측 또는 후방측의 위치에서 차폭 방향으로 배열함으로써, 서브 코일(31 내지 35)이 있는 측으로부터 주차 위치에 진입했을 때에, 차폭 방향의 위치 어긋남을 조기에 검출할 수 있다.
(다른 실시 형태)
상기한 바와 같이 본 발명의 실시 형태를 기재했지만, 이 개시의 일부를 이루는 논술 및 도면은 본 발명을 한정하는 것이라고 이해해서는 안된다. 이 개시로부터 당업자에게는 다양한 대체 실시의 형태, 실시예 및 운용 기술이 명확해질 것이다.
예를 들어, 본 발명의 제1 및 제2 실시 형태에서는, 3개의 서브 코일(31 내지 33), 서브 코일(31, 33)과 수전 코일(10)의 조합, 또는 5개의 서브 코일(31 내지 35)을 사용한 경우를 설명했지만, 4개 또는 6개 이상의 서브 코일 또는 그들과 수전 코일의 조합을 사용하여 높이 방향의 자속을 검출하고, 높이 방향의 자속의 저하에 기초하여 위치 어긋남의 유무 및 위치 어긋남의 방향을 검출해도 된다. 보다 다수의 검출용 코일을 사용하면, 보다 고정밀도로 위치 어긋남의 유무 및 위치 어긋남의 방향을 검출할 수 있다.
또한, 본 발명의 제1 및 제2 실시 형태에서는, 3개의 서브 코일(31 내지 33), 서브 코일(31, 33)과 수전 코일(10)의 조합, 또는 5개의 서브 코일(31 내지 3)을 차폭 방향으로 일렬로 배치된 경우를 설명했지만, 코일의 배열 방향은 차폭 방향으로 특별히 한정되지 않는다. 예를 들어, 복수의 서브 코일을 차량(1)의 진행 방향으로 일렬로 배치하면, 차량(1)의 진행 방향의 위치 어긋남을 검출할 수도 있다. 나아가, 복수의 코일을 차폭 방향 및 차량(1)의 진행 방향의 어느 것에도 배치하면, 차폭 방향 및 차량(1)의 진행 방향의 양쪽의 위치 어긋남을 검출할 수도 있다.
또한, 본 발명의 제1 및 제2 실시 형태에서는, 전기 부하로서 배터리(13)를 예로 들어 설명했지만, 본 발명은 이에 한정되는 것이 아니고, 예를 들면 전동기를 전기 부하로 할 수 있다.
1: 차량
2: 전원 박스
10: 수전 코일(차량 코일)
11: 차량 컨트롤러(어긋남 검출부)
12: 정류 평활 회로
13: 배터리(전기 부하)
14, 23: 통신부
15: 출력부(HMI)
20: 송전 코일(지상 코일)
21: 파워 유니트
22: 지상 컨트롤러
31 내지 35: 서브 코일
41: 자성 부재
42: 하우징
43: 코일 커버
2: 전원 박스
10: 수전 코일(차량 코일)
11: 차량 컨트롤러(어긋남 검출부)
12: 정류 평활 회로
13: 배터리(전기 부하)
14, 23: 통신부
15: 출력부(HMI)
20: 송전 코일(지상 코일)
21: 파워 유니트
22: 지상 컨트롤러
31 내지 35: 서브 코일
41: 자성 부재
42: 하우징
43: 코일 커버
Claims (6)
- 지상측의 송전 코일과 차량측의 수전 코일 사이에서 비접촉으로 급전하는 비접촉 급전 시스템에 사용하는 주차 지원 장치이며,
상기 차량의 평면에서 볼 때 한 방향을 따라서 배열되어, 상기 송전 코일로부터 발생되는 상기 차량의 높이 방향의 자속을 검출하는 적어도 3개 이상의 코일과,
상기 3개 이상의 코일에 의해 검출된 상기 차량의 높이 방향의 자속의 저하에 기초하여, 상기 한 방향에 있어서의 상기 송전 코일과 상기 수전 코일의 위치 어긋남을 검출하는 어긋남 검출부를 구비하는 것을 특징으로 하는, 주차 지원 장치. - 제1항에 있어서, 상기 3개 이상의 코일이, 제1 코일과, 상기 제1 코일을 끼워서 차폭 방향으로 대칭의 위치에 배치된 제2 및 제3 코일을 갖고,
상기 어긋남 검출부가,
상기 제2 및 제3 코일에 의해 검출된 상기 자속이 제1 임계값 이하이고, 또한 상기 제1 코일에 의해 검출된 상기 자속이 제2 임계값보다도 높은 경우에 상기 위치 어긋남이 없다고 판정하고,
상기 제2 및 제3 코일에 의해 검출된 상기 자속 중 적어도 어느 것이 상기 제1 임계값보다도 높은 경우에 상기 위치 어긋남이 있다고 판정하고,
상기 제1 코일에 의해 검출된 상기 자속이 상기 제2 임계값 이하인 경우에 상기 위치 어긋남이 있다고 판정하는 것을 특징으로 하는, 주차 지원 장치. - 제2항에 있어서, 상기 제1 내지 제3 코일이, 상기 수전 코일의 하방에, 상기 수전 코일의 중심보다도 상기 차량의 전방측 또는 후방측의 위치에서 차폭 방향으로 배열된 서브 코일인 것을 특징으로 하는, 주차 지원 장치.
- 제2항에 있어서, 상기 제1 코일이 상기 수전 코일이며,
상기 제2 및 제3 코일이, 상기 수전 코일의 하방에, 상기 차폭 방향으로 상기 수전 코일의 중심을 끼워서 대칭의 위치에 배치된 서브 코일인 것을 특징으로 하는, 주차 지원 장치. - 제1항에 있어서, 상기 코일을 5개 이상 갖고,
상기 어긋남 검출부가, 상기 5개 이상의 코일에 의해 검출된 상기 자속에 기초하여 상기 위치 어긋남의 방향을 검출하는 것을 특징으로 하는, 주차 지원 장치. - 지상측의 송전 코일과 차량측의 수전 코일 사이에서 비접촉으로 급전하는 비접촉 급전 시스템에 사용하는 주차 지원 방법이며,
상기 차량의 평면에서 볼 때 한 방향을 따라서 배열된 3개 이상의 코일을 사용하여, 상기 송전 코일로부터 발생되는 상기 차량의 높이 방향의 자속을 검출하고,
상기 3개 이상의 코일에 의해 검출된 상기 차량의 높이 방향의 자속의 저하에 기초하여, 상기 한 방향에 있어서의 상기 송전 코일과 상기 수전 코일의 위치 어긋남을 검출하는
것을 포함하는 것을 특징으로 하는, 주차 지원 방법.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2015/052509 WO2016121050A1 (ja) | 2015-01-29 | 2015-01-29 | 駐車支援装置及び駐車支援方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20170108074A true KR20170108074A (ko) | 2017-09-26 |
Family
ID=56542702
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020177023611A KR20170108074A (ko) | 2015-01-29 | 2015-01-29 | 주차 지원 장치 및 주차 지원 방법 |
Country Status (10)
| Country | Link |
|---|---|
| US (1) | US10116173B2 (ko) |
| EP (1) | EP3251886B1 (ko) |
| JP (1) | JP6394711B2 (ko) |
| KR (1) | KR20170108074A (ko) |
| CN (1) | CN107206909B (ko) |
| CA (1) | CA2974480C (ko) |
| MX (1) | MX362211B (ko) |
| MY (1) | MY165605A (ko) |
| RU (1) | RU2643317C1 (ko) |
| WO (1) | WO2016121050A1 (ko) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101956706B1 (ko) * | 2017-08-18 | 2019-03-11 | 삼성전기주식회사 | 촬상 광학계 |
| CN111038295B (zh) * | 2018-10-11 | 2021-04-13 | 广州小鹏汽车科技有限公司 | 一种无线充电线圈的对准控制方法、装置和电动汽车 |
| CN109515431B (zh) * | 2018-11-02 | 2020-06-02 | 浙江吉利汽车研究院有限公司 | 一种集成式自动泊车系统及自动泊车方法 |
| JP7352898B2 (ja) * | 2019-11-15 | 2023-09-29 | パナソニックIpマネジメント株式会社 | 駐車支援装置、駐車支援方法、及びプログラム |
| US11121590B1 (en) * | 2020-09-04 | 2021-09-14 | Apple Inc. | Wireless power system with communications |
| US11482892B2 (en) * | 2020-12-07 | 2022-10-25 | Toyota Motor Engineering & Manufacturing North America, Inc. | Systems and methods for wireless vehicle power transfer to vehicle devices using misalignment sensors |
Family Cites Families (37)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5498948A (en) * | 1994-10-14 | 1996-03-12 | Delco Electornics | Self-aligning inductive charger |
| US5617003A (en) * | 1995-03-24 | 1997-04-01 | Kabushiki Kaisha Toyoda Jidoshokki Seisakusho | Method and apparatus for charging a battery of an electric vehicle |
| DE69711963T2 (de) * | 1996-01-30 | 2002-11-28 | Sumitomo Wiring Systems | Verbindungssystem und -verfahren für ein elektrisch betriebenes Fahrzeug |
| RU2143775C1 (ru) * | 1999-03-25 | 1999-12-27 | Стребков Дмитрий Семенович | Способ и устройство для передачи электрической энергии |
| US9466419B2 (en) * | 2007-05-10 | 2016-10-11 | Auckland Uniservices Limited | Apparatus and system for charging a battery |
| US20100277121A1 (en) * | 2008-09-27 | 2010-11-04 | Hall Katherine L | Wireless energy transfer between a source and a vehicle |
| EP2199142B1 (en) | 2008-12-22 | 2013-04-17 | Aisin Aw Co., Ltd. | Guidance device for charging vehicle battery |
| US8033349B2 (en) * | 2009-03-12 | 2011-10-11 | Ford Global Technologies, Inc. | Auto-seek electrical connection for a plug-in hybrid electric vehicle |
| US9873347B2 (en) * | 2009-03-12 | 2018-01-23 | Wendell Brown | Method and apparatus for automatic charging of an electrically powered vehicle |
| JP5377119B2 (ja) | 2009-07-02 | 2013-12-25 | トヨタ自動車株式会社 | 駐車支援システムおよび駐車支援システムの制御方法 |
| JP4905571B2 (ja) * | 2010-03-10 | 2012-03-28 | トヨタ自動車株式会社 | 車両の駐車支援装置およびそれを備える車両 |
| US10343535B2 (en) * | 2010-04-08 | 2019-07-09 | Witricity Corporation | Wireless power antenna alignment adjustment system for vehicles |
| WO2012016336A2 (en) * | 2010-08-06 | 2012-02-09 | Cynetic Designs Ltd. | Inductive transmission of power and data through ceramic armor panels |
| WO2012121184A1 (ja) * | 2011-03-10 | 2012-09-13 | 日本電気株式会社 | 移動体への非接触給電システム |
| US10090885B2 (en) * | 2011-04-13 | 2018-10-02 | Qualcomm Incorporated | Antenna alignment and vehicle guidance for wireless charging of electric vehicles |
| JP2013009545A (ja) * | 2011-06-27 | 2013-01-10 | Panasonic Corp | 無線電力伝送システム及び給電装置 |
| US20130033224A1 (en) | 2011-08-05 | 2013-02-07 | Evatran Llc | Method and apparatus for aligning a vehicle with an inductive charging system |
| US9631950B2 (en) * | 2011-08-05 | 2017-04-25 | Evatran Group, Inc. | Method and apparatus for aligning a vehicle with an inductive charging system |
| JP5940784B2 (ja) * | 2011-09-09 | 2016-06-29 | 国立大学法人埼玉大学 | 移動体用非接触給電装置 |
| DE102011083427A1 (de) * | 2011-09-26 | 2013-03-28 | Siemens Aktiengesellschaft | System zur Positionsbestimmung von zueinander beweglichen Objekten |
| WO2013118745A1 (ja) * | 2012-02-06 | 2013-08-15 | 株式会社Ihi | 非接触給電システム |
| JP5890191B2 (ja) * | 2012-02-06 | 2016-03-22 | トヨタ自動車株式会社 | 送電装置、受電装置、および電力伝送システム |
| US9653206B2 (en) * | 2012-03-20 | 2017-05-16 | Qualcomm Incorporated | Wireless power charging pad and method of construction |
| JP5867329B2 (ja) | 2012-07-24 | 2016-02-24 | トヨタ自動車株式会社 | 受電装置および車両 |
| JP5988210B2 (ja) * | 2012-08-31 | 2016-09-07 | 株式会社エクォス・リサーチ | 電力伝送システム |
| US9236758B2 (en) * | 2012-11-15 | 2016-01-12 | Delphi Technologies, Inc. | System and method to align a source resonator and a capture resonator for wireless electrical power transfer |
| JP2016034169A (ja) * | 2012-12-26 | 2016-03-10 | 日産自動車株式会社 | 非接触給電装置及び非接触給電システム |
| WO2014119296A1 (ja) * | 2013-01-30 | 2014-08-07 | パナソニック株式会社 | 非接触電力伝送装置 |
| JP2014183621A (ja) * | 2013-03-18 | 2014-09-29 | Panasonic Corp | 受電装置 |
| JP2014183715A (ja) * | 2013-03-21 | 2014-09-29 | Panasonic Corp | 受電装置 |
| DE102013103157A1 (de) * | 2013-03-27 | 2014-10-02 | Dr. Ing. H.C. F. Porsche Aktiengesellschaft | Kontaktloses Aufladen eines elektrischen Energiespeichers eines Kraftfahrzeugs |
| JP5857999B2 (ja) * | 2013-04-26 | 2016-02-10 | トヨタ自動車株式会社 | 受電装置、駐車支援装置、および電力伝送システム |
| US9369001B2 (en) * | 2013-05-16 | 2016-06-14 | Delphi Technologies, Inc. | Magnetic field detection apparatus for a wireless power transfer system |
| JP6180023B2 (ja) | 2013-10-22 | 2017-08-16 | 矢崎総業株式会社 | 位置ズレ検出装置及び非接触給電装置 |
| JP6384991B2 (ja) | 2013-10-28 | 2018-09-05 | パナソニック株式会社 | 送電装置及び無線電力伝送システム |
| GB2520990A (en) * | 2013-12-06 | 2015-06-10 | Bombardier Transp Gmbh | Inductive power transfer for transferring electric energy to a vehicle |
| US9739844B2 (en) * | 2014-07-25 | 2017-08-22 | Qualcomm Incorporated | Guidance and alignment system and methods for electric vehicle wireless charging systems |
-
2015
- 2015-01-29 US US15/546,795 patent/US10116173B2/en active Active
- 2015-01-29 MX MX2017009057A patent/MX362211B/es active IP Right Grant
- 2015-01-29 KR KR1020177023611A patent/KR20170108074A/ko active Search and Examination
- 2015-01-29 CA CA2974480A patent/CA2974480C/en active Active
- 2015-01-29 JP JP2016571594A patent/JP6394711B2/ja active Active
- 2015-01-29 EP EP15879947.8A patent/EP3251886B1/en active Active
- 2015-01-29 WO PCT/JP2015/052509 patent/WO2016121050A1/ja active Application Filing
- 2015-01-29 MY MYPI2017702516A patent/MY165605A/en unknown
- 2015-01-29 CN CN201580073805.1A patent/CN107206909B/zh active Active
- 2015-01-29 RU RU2017130322A patent/RU2643317C1/ru active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3251886B1 (en) | 2019-05-08 |
| WO2016121050A1 (ja) | 2016-08-04 |
| RU2643317C1 (ru) | 2018-01-31 |
| MX2017009057A (es) | 2017-10-11 |
| US10116173B2 (en) | 2018-10-30 |
| JPWO2016121050A1 (ja) | 2017-11-09 |
| EP3251886A4 (en) | 2018-04-25 |
| MY165605A (en) | 2018-04-16 |
| JP6394711B2 (ja) | 2018-09-26 |
| CA2974480C (en) | 2019-04-02 |
| CA2974480A1 (en) | 2016-08-04 |
| MX362211B (es) | 2019-01-09 |
| US20180019623A1 (en) | 2018-01-18 |
| CN107206909A (zh) | 2017-09-26 |
| EP3251886A1 (en) | 2017-12-06 |
| CN107206909B (zh) | 2019-07-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20170108074A (ko) | 주차 지원 장치 및 주차 지원 방법 | |
| EP3979462B1 (en) | Power transmission system, foreign object detection device, and coil device | |
| EP2717431B1 (en) | Contactless electricity supply device | |
| CN105052013B (zh) | 非接触供电装置用的异物检测装置和方法 | |
| KR102489057B1 (ko) | 무선 전력 수신기로 자속 필드 특성들을 검출하기 위한 장치들 및 관련 방법들 | |
| US9704643B2 (en) | Contactless power transmission device, and power feeder and power receiver for use in the same | |
| JP6654141B2 (ja) | 非接触給電装置 | |
| US20160006260A1 (en) | Power transmission device and power reception device | |
| US10712370B2 (en) | Current sensor | |
| US10571593B2 (en) | Method for analysing measurement signal of metal sensor and detecting object via metal sensor | |
| US9555713B2 (en) | Contactless power transmission device | |
| KR101821104B1 (ko) | 비접촉 수전 장치의 온도 추정 장치 및 온도 추정 방법 | |
| JP2015008548A (ja) | 非接触電力伝送装置 | |
| KR101703995B1 (ko) | 전기자동차 급집전장치용 fod/lod 장치 | |
| CN112400267A (zh) | 非接触供电装置及非接触供电系统 | |
| JP2016200436A (ja) | 電流センサ | |
| WO2013061611A1 (ja) | 非接触電力伝送装置 | |
| US20150022014A1 (en) | Power Supply Device and Method for Detecting Presence of Foreign Object | |
| US20220229094A1 (en) | Magnetic sensor and current detecting apparatus including the same | |
| JP2017055529A (ja) | 送電装置、受電装置、及び非接触電力伝送システム | |
| JP6808989B2 (ja) | インバータモジュール | |
| JPH0767271A (ja) | 移動体の非接触給電装置における変位検出装置 | |
| JP2012104017A (ja) | 静電入力装置 | |
| JP7452285B2 (ja) | コイル装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| AMND | Amendment | ||
| A302 | Request for accelerated examination | ||
| E902 | Notification of reason for refusal | ||
| AMND | Amendment | ||
| E601 | Decision to refuse application | ||
| AMND | Amendment | ||
| J201 | Request for trial against refusal decision | ||
| J301 | Trial decision |
Free format text: TRIAL NUMBER: 2018101004631; TRIAL DECISION FOR APPEAL AGAINST DECISION TO DECLINE REFUSAL REQUESTED 20181114 Effective date: 20190131 |