KR20150122661A - 습식 에칭 공정을 수행하기 위한 시스템 및 방법 - Google Patents
습식 에칭 공정을 수행하기 위한 시스템 및 방법 Download PDFInfo
- Publication number
- KR20150122661A KR20150122661A KR1020157023130A KR20157023130A KR20150122661A KR 20150122661 A KR20150122661 A KR 20150122661A KR 1020157023130 A KR1020157023130 A KR 1020157023130A KR 20157023130 A KR20157023130 A KR 20157023130A KR 20150122661 A KR20150122661 A KR 20150122661A
- Authority
- KR
- South Korea
- Prior art keywords
- substrate
- etch
- etching
- intensity
- wafer
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims abstract description 273
- 230000008569 process Effects 0.000 title claims abstract description 208
- 238000001039 wet etching Methods 0.000 title claims abstract description 28
- 239000000758 substrate Substances 0.000 claims abstract description 323
- 238000005530 etching Methods 0.000 claims abstract description 91
- 238000005259 measurement Methods 0.000 claims abstract description 44
- 238000001514 detection method Methods 0.000 claims abstract description 39
- 238000012545 processing Methods 0.000 claims abstract description 38
- 238000012546 transfer Methods 0.000 claims abstract description 28
- 241000724291 Tobacco streak virus Species 0.000 claims description 55
- 238000004140 cleaning Methods 0.000 claims description 55
- 238000003384 imaging method Methods 0.000 claims description 43
- 239000000126 substance Substances 0.000 claims description 37
- 230000003287 optical effect Effects 0.000 claims description 22
- 238000003860 storage Methods 0.000 claims description 20
- 239000007788 liquid Substances 0.000 claims description 10
- 238000003486 chemical etching Methods 0.000 claims description 5
- 239000007921 spray Substances 0.000 claims description 5
- 238000012935 Averaging Methods 0.000 claims 1
- 235000012431 wafers Nutrition 0.000 abstract description 205
- 238000011065 in-situ storage Methods 0.000 abstract description 2
- 230000006870 function Effects 0.000 description 26
- KWYUFKZDYYNOTN-UHFFFAOYSA-M Potassium hydroxide Chemical compound [OH-].[K+] KWYUFKZDYYNOTN-UHFFFAOYSA-M 0.000 description 24
- 239000000463 material Substances 0.000 description 20
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 18
- 229910052710 silicon Inorganic materials 0.000 description 18
- 239000010703 silicon Substances 0.000 description 18
- 239000012530 fluid Substances 0.000 description 15
- 238000010586 diagram Methods 0.000 description 14
- 230000003746 surface roughness Effects 0.000 description 12
- 238000004891 communication Methods 0.000 description 10
- 230000007246 mechanism Effects 0.000 description 10
- 239000002245 particle Substances 0.000 description 10
- 238000005201 scrubbing Methods 0.000 description 10
- 238000011068 loading method Methods 0.000 description 9
- 238000004886 process control Methods 0.000 description 9
- 230000008901 benefit Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 8
- 239000010410 layer Substances 0.000 description 8
- 238000000227 grinding Methods 0.000 description 7
- 150000002500 ions Chemical class 0.000 description 6
- 239000012790 adhesive layer Substances 0.000 description 5
- 239000004020 conductor Substances 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- ZLMJMSJWJFRBEC-UHFFFAOYSA-N Potassium Chemical compound [K] ZLMJMSJWJFRBEC-UHFFFAOYSA-N 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 4
- 238000004590 computer program Methods 0.000 description 4
- 238000001035 drying Methods 0.000 description 4
- 230000000670 limiting effect Effects 0.000 description 4
- 238000001000 micrograph Methods 0.000 description 4
- 239000000203 mixture Substances 0.000 description 4
- 229910052700 potassium Inorganic materials 0.000 description 4
- 239000011591 potassium Substances 0.000 description 4
- 239000004065 semiconductor Substances 0.000 description 4
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 4
- 230000001419 dependent effect Effects 0.000 description 3
- 238000000151 deposition Methods 0.000 description 3
- 238000007599 discharging Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000010949 copper Substances 0.000 description 2
- 239000012212 insulator Substances 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 238000013178 mathematical model Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012544 monitoring process Methods 0.000 description 2
- 238000001020 plasma etching Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 229910052814 silicon oxide Inorganic materials 0.000 description 2
- ABEXEQSGABRUHS-UHFFFAOYSA-N 16-methylheptadecyl 16-methylheptadecanoate Chemical group CC(C)CCCCCCCCCCCCCCCOC(=O)CCCCCCCCCCCCCCC(C)C ABEXEQSGABRUHS-UHFFFAOYSA-N 0.000 description 1
- JBRZTFJDHDCESZ-UHFFFAOYSA-N AsGa Chemical compound [As]#[Ga] JBRZTFJDHDCESZ-UHFFFAOYSA-N 0.000 description 1
- 229910001218 Gallium arsenide Inorganic materials 0.000 description 1
- 241000764238 Isis Species 0.000 description 1
- 244000185238 Lophostemon confertus Species 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 230000002159 abnormal effect Effects 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 230000001413 cellular effect Effects 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000008021 deposition Effects 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 230000005621 ferroelectricity Effects 0.000 description 1
- 239000010408 film Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000005417 image-selected in vivo spectroscopy Methods 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000007689 inspection Methods 0.000 description 1
- 238000012739 integrated shape imaging system Methods 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 238000001465 metallisation Methods 0.000 description 1
- 238000003909 pattern recognition Methods 0.000 description 1
- 230000000704 physical effect Effects 0.000 description 1
- 229910001414 potassium ion Inorganic materials 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000004064 recycling Methods 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- LIVNPJMFVYWSIS-UHFFFAOYSA-N silicon monoxide Chemical class [Si-]#[O+] LIVNPJMFVYWSIS-UHFFFAOYSA-N 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000009987 spinning Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000012876 topography Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images













Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/04—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer
- H01L21/18—Manufacture or treatment of semiconductor devices or of parts thereof the devices having potential barriers, e.g. a PN junction, depletion layer or carrier concentration layer the devices having semiconductor bodies comprising elements of Group IV of the Periodic Table or AIIIBV compounds with or without impurities, e.g. doping materials
- H01L21/30—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26
- H01L21/302—Treatment of semiconductor bodies using processes or apparatus not provided for in groups H01L21/20 - H01L21/26 to change their surface-physical characteristics or shape, e.g. etching, polishing, cutting
- H01L21/306—Chemical or electrical treatment, e.g. electrolytic etching
- H01L21/30604—Chemical etching
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/10—Measuring as part of the manufacturing process
- H01L22/12—Measuring as part of the manufacturing process for structural parameters, e.g. thickness, line width, refractive index, temperature, warp, bond strength, defects, optical inspection, electrical measurement of structural dimensions, metallurgic measurement of diffusions
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N21/00—Investigating or analysing materials by the use of optical means, i.e. using sub-millimetre waves, infrared, visible or ultraviolet light
- G01N21/17—Systems in which incident light is modified in accordance with the properties of the material investigated
- G01N21/55—Specular reflectivity
-
- G06F17/50—
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F30/00—Computer-aided design [CAD]
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67046—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly scrubbing means, e.g. brushes
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67028—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like
- H01L21/6704—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing
- H01L21/67051—Apparatus for fluid treatment for cleaning followed by drying, rinsing, stripping, blasting or the like for wet cleaning or washing using mainly spraying means, e.g. nozzles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67011—Apparatus for manufacture or treatment
- H01L21/67017—Apparatus for fluid treatment
- H01L21/67063—Apparatus for fluid treatment for etching
- H01L21/67075—Apparatus for fluid treatment for etching for wet etching
- H01L21/6708—Apparatus for fluid treatment for etching for wet etching using mainly spraying means, e.g. nozzles
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/67005—Apparatus not specifically provided for elsewhere
- H01L21/67242—Apparatus for monitoring, sorting or marking
- H01L21/67253—Process monitoring, e.g. flow or thickness monitoring
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L22/00—Testing or measuring during manufacture or treatment; Reliability measurements, i.e. testing of parts without further processing to modify the parts as such; Structural arrangements therefor
- H01L22/20—Sequence of activities consisting of a plurality of measurements, corrections, marking or sorting steps
- H01L22/26—Acting in response to an ongoing measurement without interruption of processing, e.g. endpoint detection, in-situ thickness measurement
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L2924/00—Indexing scheme for arrangements or methods for connecting or disconnecting semiconductor or solid-state bodies as covered by H01L24/00
- H01L2924/0001—Technical content checked by a classifier
- H01L2924/0002—Not covered by any one of groups H01L24/00, H01L24/00 and H01L2224/00
Landscapes
- Engineering & Computer Science (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Power Engineering (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Chemical & Material Sciences (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Pathology (AREA)
- Immunology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- Theoretical Computer Science (AREA)
- Evolutionary Computation (AREA)
- Geometry (AREA)
- General Engineering & Computer Science (AREA)
- Weting (AREA)
- Cleaning Or Drying Semiconductors (AREA)
- Architecture (AREA)
- Software Systems (AREA)
- Chemical Kinetics & Catalysis (AREA)
- General Chemical & Material Sciences (AREA)
Abstract
습식 에칭 공정을 수행하기 위한 시스템 및 방법을 개시한다. 시스템은, 기판의 두께를 광학적으로 측정하는 측정 스테이션을 비롯한 이송 장치에 의해 액세스가능한 다수의 처리 스테이션, 및 기판에 대한 에칭 레시피를 실시간으로 산출하고 단일 웨이퍼 습식 에칭 스테이션이 레시피에 따라 기판을 에칭하게 하는 컨트롤러를 포함한다. 또한, 시스템은, 에칭 후 두께 측정 에칭 레시피의 산출을 이전 기판의 최종 측정의 함수로서 실시간으로 행할 수 있다. 시스템은, 또한, TSV 기판을 에칭하면서 TSV 표출점을 검출하기 위한 인시츄 종점 검출 장치를 포함할 수 있다. 시스템은, 이전에 에칭된 웨이퍼에 관한 피드백에 따라 에칭 레시피 파라미터들을 실시간으로 조정하고 종점 검출을 이용하여 TSV 표출 높이와 에칭 지속시간을 정밀하게 제어하는 자동화 해결책을 제공한다.
Description
본 발명은, 일반적으로 집적 회로를 위한 반도체 웨이퍼를 에칭하기 위한 시스템 및 방법에 관한 것으로서, 더욱 구체적으로는, 웨이퍼를 정밀하고 균일한 두께로 에칭하는 습식 에칭 공정을 이용하여 반도체 웨이퍼(집적 회로 기판)를 에칭하기 위한 시스템 및 방법에 관한 것이다.
2.5 및 3D 집적은 장치 제조에 있어서 현실로 되고 있다. 결정적인 공정 단계는, 금속으로 충전되는 실리콘 관통 비아(Through Silicon Via; TSV)를 표출하도록 실리콘 웨이퍼를 박막화하는 것이다. 연삭은 실리콘 웨이퍼의 벌크를 제거하는 데 사용된다. 현재는, 화학적 기계적 평탄화(CMP)와 플라즈마 에칭을 포함하는 공정들의 다단계 시퀀스를 이용하여 실리콘의 최종 박막화를 완료해 왔다. 그러나, 이러한 종래의 공정에는, 공정의 복잡성 및 연관된 비용을 비롯하여 많은 단점이 연관되어 있으며, 이러한 단점 예들로 한정되지도 않는다. 후술하는 바와 같이, 본 발명은, TSV들을 표출하도록 잔여 실리콘을 습식 에칭하는 간단하면서 비용 효과적인 방법을 제공함으로써, 종래의 공정에 연관된 이러한 단점들을 극복하고자 하는 것이다.
TSV 웨이퍼(기판)는 기판의 상부면에 비아들(홀들)을 생성함으로써 제조된다. 이 비아들은 웨이퍼의 두께를 통해 부분적으로 연장된다. 이어서, 홀들은, 절연성 라이너와 함께 또는 절연성 라이너 없이 도전성 물질로 충전된다. 이어서, 비아들이 생성된 측의 반대측인 웨이퍼의 하부면은 기계적 연삭에 의해 기판의 두께를 감소시키는 연삭 공정을 거쳐, 비아의 하부부터 기판의 하부면까지의 거리를 효과적으로 감소시킨다. 전도체를 노출시키도록 기판을 완전히 연삭하는 것은 바람직하지 못한데, 이는 도전성 물질로부터의 이온이 기판 표면에 걸쳐 퍼져서 오염된 사이트에서의 전기적 특성을 변경하고 수율을 감소시키기 때문이다. 응용 분야에 따라 하부면을 추가 처리하기 전에 웨이퍼의 상부면에 대하여 임의의 개수의 제조 단계를 수행할 수 있다. 예를 들어, 장치 웨이퍼에 대하여, 전체 장치 구조 및 야금성 성분들을 웨이퍼의 상부면에 추가할 수 있다. 2.5D 인터포저 응용 분야에서는, 상부면 와이어링/상호 접속을 완료할 수 있다. 이어서, 비아들이 있는 웨이퍼는, 통상적으로, 접착층을 사용하여 캐리어 웨이퍼 상에 웨이퍼의 상부면이 캐리어 웨이퍼를 향하게 하여 장착된다.
연삭 공정은, 기판 물질의 층을, 에지에서 더욱 두꺼울 수 있고, 웨이퍼에 걸쳐 균일할 수 있고, 또는 (웨이퍼 두께 변동 내에서) 에지에서보다 웨이퍼의 중심에서 더욱 두꺼울 수 있는 비아 위에 둔다. 마찬가지로, 웨이퍼마다(웨이퍼마다의 두께 변동) 비아들 위의 기판 물질의 높이에 있어서 차이가 있을 수 있다. 비아들 위에 있는 층의 이러한 차이는 노출된 비아들의 높이의 허용가능한 차이보다 커질 수 있다.
캐리어 웨이퍼 및 비아 웨이퍼는 접착 물질을 사용하여 장착된다. 이 접착층의 두께와 균일도는 가변될 수 있어서, 비아의 단부 위의 상부 실리콘 웨이퍼에 남아 있는 물질의 두께와 균일도의 결정시 외측 측정이 비효율적으로 되어버린다.
(다른 형상도 가능하지만) 통상적으로 평평하고 둥근 디스크의 형태로 되며 실리콘, 비화 갈륨, 또는 기타 물질로 종종 형성된 집적 회로 웨이퍼는, 다양한 화학물질들을 사용하여 처리될 수 있다. 한 공정은, 액체 화학 에칭액을 사용하여 기판으로부터의 또는 기판 상의 물질을 제거하는 것이며, 이 공정을 흔히 습식 에칭이라 한다. 흔히 사용되는 방법들은, 화학 조들(chemical baths)에 웨이퍼들을 침수시키는 단계("일괄 처리" 또는 "침지 처리"라 함) 또는 웨이퍼를 회전시키는 동안 웨이퍼 상에 유체를 분배하는 단계("단일 웨이퍼 처리"라 함)를 포함한다. 웨이퍼 크기가 증가하고 형상 크기가 감소함에 따라, 처리 환경이 더욱 양호하게 제어될 수 있다는 점을 고려할 때 단일 웨이퍼 처리를 채택함으로써 상당한 이점들을 실현할 수 있다.
습식 에칭 공정의 에칭 속도(etch rate)는 에칭액 농도 변화에 따라 가변된다. 에칭 속도를 유지하도록 새로운 소량의 화학 에칭액을 첨가하는 것은 화학 에칭액을 재순환하는 경우에 흔히 있는 일이다. 통상적으로, 이 첨가는 에칭액 준비부터 경과된 시간 또는 처리된 웨이퍼에 기반한 수학적 모델에 기초한다. 측정 피드백이 없으면, 에칭 속도는, 수학적 모델이 새로운 화학 에칭액을 주입할 필요성을 예측할 수 있을 때에만 유지될 것이다. 마찬가지로, 임의의 외측 영향을 고려하지 못하며 에칭 속도가 일정하게 유지되지 않을 것이다. 에칭 공정의 깊이는 에칭 속도와 시간의 함수이다. 시간은 잘 제어되지만, 에칭 속도는 여러 인자들에 기초하여 가변될 수 있다. 마찬가지로, 필요한 에칭 깊이는, 웨이퍼마다 두께 변동이 있으므로, 가변될 것이다. 이에 따라, 비아들이 노출될 때를 결정하는 방법의 부재로 인해, 처리되는 각 웨이퍼 상에 정밀한 깊이를 노출시키는 능력이 제한된다.
KOH(수산화칼륨)는, (구리 등의) 전도체와 (실리콘 산화물 등의) 절연체에 대하여 실리콘을 선택적으로 에칭하는 특성 때문에 통상적으로 사용되는 하나의 에칭액이다. KOH 에칭 후에는, 웨이퍼의 표면 상에 칼륨이 남게 된다. 에칭 공정으로부터의 잔여 칼륨계 입자들 및 이온들에 의해, 기판 표면의 전기적 특성이 변하며 이에 따라 에칭 공정 후 제거되지 않는 경우 수율 손실이 발생하게 된다.
TSV 웨이퍼의 박막화와 마찬가지로, 비(non) TSV 웨이퍼를 박막화하기 위한 종래의 공정은, 웨이퍼의 벌크를 제거하기 위한 연삭 및 웨이퍼의 최종 박막화를 완료하기 위한 화학적 기계적 평탄화(CMP)와 플라즈마 에칭을 포함하는 공정들의 다단계 시퀀스를 포함한다. 그러나, 이러한 종래의 공정에는, 공정의 복잡성 및 연관된 비용을 비롯하여 많은 단점이 연관되어 있으며, 이러한 단점 예들로 한정되지도 않는다. 후술하는 바와 같이, 본 발명은, 남아 있는 기판을 원하는 두께와 표면 균일도로 습식 에칭하는 간단하면서 비용 효과적인 방법을 제공함으로써, 종래의 공정에 연관된 이러한 단점들을 극복하고자 하는 것이다.
따라서, (1) 기판으로부터 제거할 물질의 양과 패턴을 결정하고, (2) 물질을 원하는 균일도로 제거하고, (3) 비아들을 원하는 깊이로 노출시키도록 에칭 공정을 언제 종료할지를 결정하고, 그리고 (4) 노출된 비아들을 방해하지 않고서 TSV 웨이퍼 표면으로부터 잔여 칼륨을 세정하기 위한 시스템 및 방법이 필요하다. 본 발명은 이하에 기재된 바와 같이 이들 목적을 달성한다.
제1양태에 따르면, 습식 에칭 공정을 수행하기 위한 시스템을 제공한다. 이 시스템은, 하우징 및 하우징 내에 배치된 다수의 웨이퍼/기판 처리 스테이션을 포함하고, 다수의 웨이퍼/기판 처리 스테이션은, 특히 기판에 대한 초기 두께 정보와 최종 두께 정보를 실시간으로 측정하도록 구성된 촬상 장치를 포함하는 측정 스테이션을 포함한다. 또한, 하우징 내에는, 단일 웨이퍼 습식 에칭 장치를 포함하는 에칭 스테이션이 있다. 자동화 기판 이송 장치(automated substrate transfer device)는, 시스템에 포함된 측정 스테이션과 단일 웨이퍼 습식 에칭 스테이션과 다른 임의의 스테이션 간에 기판을 제어가능하게 이동시키도록 구성된다. 컴퓨터 구현 제어 시스템은 처리 시스템과 그 내부의 스테이션들에 통신가능하게 결합된다. 제어 시스템은, 촬상 장치가 기판의 두께를 측정하게 하고 그 두께 정보를 이용하여 기판에 대한 에칭 레시피(etch recipe)를 실시간으로 산출하게 함으로써, 습식 에칭 공정을 제어하도록 구성된다. 컨트롤러는, 또한, 단일 웨이퍼 습식 에칭 장치가 에칭 레시피에 따라 기판을 에칭하게 하고 기판이 에칭된 후 촬상 장치가 최종 두께 정보를 재측정하게 하도록 구성된다. 또한, 제어 시스템은, 이전 기판으로부터의 최종 두께 정보의 함수로서 에칭 레시피를 실시간으로 산출할 수 있다.
또한, 에칭 스테이션은, 고 강도 광 방출기와 검출기를 포함할 수 있는 종점 검출 장치를 포함할 수 있고, 제어 시스템은, 에칭 공정 동안 종점 검출 장치에 의해 수집되는 정보를 이용하여 TSV들을 갖는 기판에 대한 표출점(reveal point)을 검출하도록 구성될 수 있다. 게다가, 제어 시스템은, 에칭 공정 후에 시판을 세정하도록 하우징 내에 제어 시스템에 통신가능하게 결합된 하나 이상의 세정 스테이션도 포함할 수 있다. 습식 에칭 공정을 수행하기 위한 이러한 양태, 특징, 장점, 및 다른 양태, 특징, 장점은, 본 명세서에서 더 설명하는 공정 및/또는 방법으로부터 파악할 수 있다.
다른 일 양태에 따르면, 단일 웨이퍼 습식 에칭 처리 시스템을 이용하여 기판을 습식 에칭하기 위한 방법을 제공한다. 이 방법은, 처리되는 측정 기판에 대한 초기 두께 정보를 측정 스테이션에서 측정하는 단계를 포함한다. 초기 두께 정보는, 기판의 표면 상의 하나 이상의 방사상 위치에서의 기판의 두께를 포함하며, 측정 스테이션 내에 배치된 촬상 장치를 이용하여 기판을 광학적으로 주사함으로써 얻어질 수 있다. 또한, 방법은, 초기 두께 정보에 따라 및 처리 후 목표로 하는 기판의 물리적 특징인 원하는 최종 에칭 프로파일에 따라 특정 기판에 대한 에칭 프로파일을 산출하는 단계를 포함한다. 에칭 프로파일을 산출하는 단계를 기판의 방사상 두께 및 에칭 깊이를 산출하는 단계를 포함할 수 있다. 또한, 에칭 레시피는 산출된 에칭 프로파일에 따라 특정 기판에 대하여 생성된다. 에칭 레시피는 습식 에칭 공정의 실행을 제어하는 다양한 파라미터들을 위한 설정을 포함한다. 또한, 방법은, 원하는 최종 에칭 프로파일을 달성하도록 에칭 레시피에 따라 특정 기판을 에칭하는 단계를 포함한다. 이러한 예시적인 공정을 수행하는 데 사용되는 다양한 스테이션들은, 처리 시스템의 하우징 내에 배치되며, 스테이션들 간에 기판을 제어가능하게 이동시키도록 구성된 자동화 기판 이송 장치에 의해 액세스되며, 이에 따라 기판이 에칭 처리를 거칠 때 기판을 실시간으로 측정할 수 있다는 점을 이해하기 바란다. 또한, 방법은, 특정 기판이 에칭된 후 측정 스테이션에서 특정 기판에 대한 최종 두께 정보를 측정하는 단계를 포함할 수 있다. 또한, 최종 두께 정보는, 후속 처리되는 기판에 대한 에칭 레시피를 산출하는 데 사용될 수 있다.
또한, 방법은, 처리 시스템 내에 배치된 세정 스테이션에서 특정 기판을 세정하기 위한 하나 이상의 단계를 포함할 수 있다. 이 방법은, 특히, 에칭 단계는, 에칭 스테이션 내에 포함된 종점 검출 장치를 이용하여 기판에 있는 하나 이상의 TSV가 표출되는 지점을 검출하는 단계도 포함할 수 있다.
또 다른 일 양태에 따르면, 단일 웨이퍼 습식 에칭 처리 시스템을 이용하여 TSV들이 있는 특정 기판이 에칭되는 에칭 공정의 종점을 검출하기 위한 방법을 제공한다. 방법은, 특정 기판의 표면의 적어도 샘플 영역에 광을 방출하는 단계 및 표면의 샘플 영역으로부터의 광의 반사를 검출하는 단계를 포함한다. 또한, 방법은, 반사의 강도를 산출하는 단계와 그 강도를 기준 강도와 비교하는 단계를 포함한다. 기준 강도는, 에칭 공정 동안 특정 기판의 표면 상에 TSV들이 표출되는 지점인 표출점을 나타낸다(즉, 에칭액이 TSV들 위의 기판 층을 TSV들이 노출되는 지점까지 제거하였다). 방법은, 강도가 기준 강도에 대응하는 때를 검출하고 이에 따라 에칭 공정의 표출점을 식별하는 단계를 포함한다. 또한, 방법은, 식별된 표출점을 고려하여 및 선택 사항으로 사용자가 입력하는 오버에칭 지속시간(over etch duration)을 고려하여 에칭 공정의 종점을 설정하는 단계를 포함한다. 종점은 원하는 높이에 따라 가변될 수 있다.
또 다른 일 양태에 따르면, 단일 웨이퍼 습식 에칭 처리 시스템에서 기판의 습식 에칭 공정을 제어하기 위한 컴퓨터 구현 제어 시스템을 제공한다. 단일 웨이퍼 습식 에칭 처리 시스템은, 자동화 기판 이송 장치에 의해 액세스가능하며 하우징 내에 배치된 촬상 장치와 단일 웨이퍼 습식 에칭 장치를 포함하고, 제어 시스템은, 컴퓨터 판독가능 저장 매체와 상호 작용하고 저장 매체에 저장된 하나 이상의 소프트웨어 모듈을 실행하도록 구성되고 처리 시스템의 구성요소들에 통신가능하게 결합된 하나 이상의 프로세서를 포함한다. 소프트웨어 모듈은, 촬상 장치가 기판에 대한 초기 두께 정보를 측정하게 하고 촬상 장치로부터 초기 두께 정보를 수신하도록 구성된 촬상 모듈을 포함한다. 또한, 소프트웨어 모듈은, 기판에 대한 방사상 두께를 실시간으로 산출하고 적어도 방사상 두께 정보와 원하는 최종 에칭 프로파일에 따라 기판에 대한 에칭 깊이를 산출하도록 구성된 기판 두께 모듈을 포함한다. 또한, 소프트웨어 모듈은, 방사상 두께와 에칭 깊이에 따라 기판에 대한 에칭 레시피를 생성하고 단일 웨이퍼 습식 에칭 장치가 에칭 레시피에 따라 기판을 에칭하게 하도록 구성된 에칭 레시피 모듈을 포함한다. 또한, 촬상 모듈은, 에칭 스테이션에 의해 기판이 에칭된 후, 촬상 장치가 기판에 대한 최종 두께 정보를 측정하게 하고 촬상 장치로부터 최종 두께 정보를 수신하도록 또한 구성될 수 있다. 또한, 시스템은, 이전 기판의 최종 두께 정보에 따라 에칭 레시피를 산출하도록 또한 구성된 에칭 레시피 모듈을 포함할 수 있다. 또한, 시스템은, 기판 세정 장치가 기판을 세정하게 하도록 구성된 세정 모듈을 포함할 수 있다.
또 다른 일 양태에 따르면, 단일 웨이퍼 습식 에칭 스테이션에 의해 TSV들이 있는 기판의 습식 에칭 공정의 종점을 결정하기 위한 컴퓨터 구현 제어 시스템을 제공한다. 단일 웨이퍼 습식 에칭 스테이션은, 단일 웨이퍼 습식 에칭 장치, 광 방출기, 및 광 검출기를 포함하고, 제어 시스템은, 단일 웨이퍼 습식 에칭 장치, 광 방출기, 및 광 검출기에 통신가능하게 결합되고 컴퓨터 판독가능 저장 매체와 상호 작용하고 저장 매체에 저장된 하나 이상의 소프트웨어 모듈을 실행하도록 구성된 하나 이상의 프로세서를 포함한다. 소프트웨어 모듈은, 광 방출기가 광을 기판의 표면의 적어도 샘플 영역 상에 방출하게 하고 광 검출기가 표면의 샘플 영역으로부터의 광의 반사를 검출하게 하도록 구성된 종점 검출 모듈을 포함한다. 종점 검출 모듈은, 또한, 반사의 강도를 산출하고 반사의 강도를 기준 강도와 비교하도록 구성되며, 기준 강도는, 에칭 공정 동안 기판의 표면 상에 TSV들이 표출되는 지점인 표출점을 나타낸다. 강도를 비교함으로써, 제어 시스템은, 강도가 기준 강도에 대응하는 때를 결정할 수 있고, 식별된 표출점을 고려하여 및 선택 사항으로 사용자에 의해 정의되는 바와 같은 오버에칭 지속시간을 고려하여 에칭 공정의 종점을 설정할 수 있다.
이러한 양태, 특징, 장점, 및 다른 양태, 특징, 장점은, 본 발명의 일부 실시예들의 첨부 설명 및 첨부 도면과 청구범위로부터 파악할 수 있다.
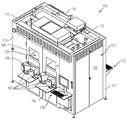
도 1은 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템을 도시하는 사시도;
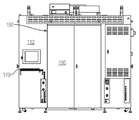
도 2는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템을 도시하는 전방 평면도;
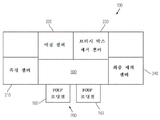
도 3은 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템의 예시적인 구성을 도시하는 블록도;
도 4는 본 명세서에 개시한 일 실시예에 따라 측정 스테이션을 도시하는 전방 평면도;
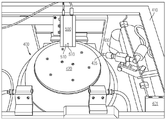
도 5는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 스테이션을 도시하는 사시도;
도 6a는 본 명세서에 개시한 일 실시예에 따라 세정 스테이션을 도시하는 전방 평면도;
도 6b는 본 명세서에 개시한 일 실시예에 따라 세정 스테이션을 도시하는 전방 평면도;
도 7a는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템의 예시적인 구성을 도시하는 블록도;
도 7b는 본 명세서에 개시한 일 실시예에 따라 공정 제어 시스템의 예시적인 구성을 도시하는 블록도;
도 8은 본 명세서에 개시한 적어도 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 루틴을 도시하는 흐름도;
도 9a는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 예시적인 실리콘 기판을 도시하는 단면도;
도 9b는 본 명세서에 개시한 일 실시예에 따라 예시적인 기판의 방사상 두께를 도시하는 그래프;
도 9c는 본 명세서에 개시한 일 실시예에 따라 예시적인 기판의 두께를 도시하는 그래프;
도 9d는 본 명세서에 개시한 일 실시예에 따라 스핀 속도, 에칭 속도, 및 에칭액 온도 간의 예시적인 관계를 도시하는 그래프;
도 9e는 본 명세서에 개시한 일 실시예에 따라 에칭 속도와 에칭액 농도 간의 예시적인 관계를 도시하는 그래프;
도 9f는 본 명세서에 개시한 일 실시예에 따라 암(arm) 주사 속도와 체류 시간 간의 예시적인 관계를 방사상 위치의 함수로서 도시하는 그래프;
도 9g는 본 명세서에 개시한 일 실시예에 따라 유속, 에칭액 온도, 및 표면 조도(roughness) 간의 예시적인 관계를 도시하는 그래프;
도 9h는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 기판의 예시적인 주사 전자 현미경 화상을 예시하는 도면;
도 9i는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 기판의 예시적인 주사 전자 현미경 화상을 예시하는 도면;
도 10은 본 명세서에 개시한 적어도 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 루틴을 예시하는 흐름도;
도 11은 본 명세서에 개시한 적어도 일 실시예에 따라 시간 경과에 따른 광 강도 값을 도시하는 그래프.
도 2는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템을 도시하는 전방 평면도;
도 3은 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템의 예시적인 구성을 도시하는 블록도;
도 4는 본 명세서에 개시한 일 실시예에 따라 측정 스테이션을 도시하는 전방 평면도;
도 5는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 스테이션을 도시하는 사시도;
도 6a는 본 명세서에 개시한 일 실시예에 따라 세정 스테이션을 도시하는 전방 평면도;
도 6b는 본 명세서에 개시한 일 실시예에 따라 세정 스테이션을 도시하는 전방 평면도;
도 7a는 본 명세서에 개시한 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템의 예시적인 구성을 도시하는 블록도;
도 7b는 본 명세서에 개시한 일 실시예에 따라 공정 제어 시스템의 예시적인 구성을 도시하는 블록도;
도 8은 본 명세서에 개시한 적어도 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 루틴을 도시하는 흐름도;
도 9a는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 예시적인 실리콘 기판을 도시하는 단면도;
도 9b는 본 명세서에 개시한 일 실시예에 따라 예시적인 기판의 방사상 두께를 도시하는 그래프;
도 9c는 본 명세서에 개시한 일 실시예에 따라 예시적인 기판의 두께를 도시하는 그래프;
도 9d는 본 명세서에 개시한 일 실시예에 따라 스핀 속도, 에칭 속도, 및 에칭액 온도 간의 예시적인 관계를 도시하는 그래프;
도 9e는 본 명세서에 개시한 일 실시예에 따라 에칭 속도와 에칭액 농도 간의 예시적인 관계를 도시하는 그래프;
도 9f는 본 명세서에 개시한 일 실시예에 따라 암(arm) 주사 속도와 체류 시간 간의 예시적인 관계를 방사상 위치의 함수로서 도시하는 그래프;
도 9g는 본 명세서에 개시한 일 실시예에 따라 유속, 에칭액 온도, 및 표면 조도(roughness) 간의 예시적인 관계를 도시하는 그래프;
도 9h는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 기판의 예시적인 주사 전자 현미경 화상을 예시하는 도면;
도 9i는 본 명세서에 개시한 일 실시예에 따라 TSV들을 갖는 기판의 예시적인 주사 전자 현미경 화상을 예시하는 도면;
도 10은 본 명세서에 개시한 적어도 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 루틴을 예시하는 흐름도;
도 11은 본 명세서에 개시한 적어도 일 실시예에 따라 시간 경과에 따른 광 강도 값을 도시하는 그래프.
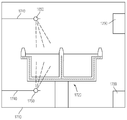
도 1 내지 도 5는 본 발명의 일 실시예에 따라 습식 에칭 공정을 수행하기 위한 시스템(100)을 예시한다. 따라서, 시스템(100)은 반도체 장치를 제조하기 위한 습식 에칭 시설이라 할 수 있다.
반도체 장치 제조 공정의 웨이퍼 습식 처리 공정에는, 전술한 바와 같이 일반적으로 에칭 공정과 세정 공정이 있다. 에칭 공정에서 사용되는 단일 웨이퍼 습식 처리 장치는 고정된 시간 동안 화학 반응을 유도하도록 기판 상에 화학 에칭액을 제어 하에 분배한다. "웨이퍼"와 "기판"이라는 용어들은 본 명세서에서 상호 교환하여 사용된다는 점을 이해할 것이다. 세정 공정에서 사용되는 단일 웨이퍼 습식 처리 장치는, 화학 용액이 기판 상으로 분배되게 하며, 기판을 기계적으로 스크러빙하는 스크러빙 장치도 포함할 수 있다. 습식 처리 장치들의 각각은, 외부 탱크(또는 조)로 넘치고 방출되거나 재순환하는 유체를 수집하는 조(bath)를 포함할 수 있다. 단일 웨이퍼 습식 처리 장치들은, 조의 유체(예를 들어, 화학물, 물, 용액 등)를 공급하거나 방출하는 도관들(예를 들어, 파이프), 및 본 명세서에서 더 설명하는 바와 같이 유체 온도 또는 온도 및 기타 공정 파라미터들을 제어하기 위한 다양한 종류의 제어 수단으로 더 구성된다. 웨이퍼 습식 처리 공정은, 또한, 웨이퍼들의 두께를 측정하는 측정 단계를 포함할 수 있다.
습식 에칭을 수행하기 위한 종래의 시스템에는, 사용되는 많은 장비가 존재하지만, 일반적으로 장비들 간의 집적이 부족하다. 더욱 구체적으로는, 제1위치에서 측정 단계가 수행되지만, 웨이퍼를 웨이퍼 습식 에칭 장치를 사용하는 에칭 공정을 위한 다른 원격 스테이션으로 물리적으로 이송하는 것이 종종 필요하며, 에칭 공정을 완료하기 전에, 예를 들어, 웨이퍼를 세정하거나 웨이퍼를 측정하도록 웨이퍼를 다른 원격 스테이션으로 물리적으로 이송하는 것이 종종 필요하다. 이는, 웨이퍼를 웨이퍼 습식 처리 장치에 재도입하기 전에 대기 시간이 있을 수 있으므로, 공정에 추가 지연을 더하게 된다. 이러한 종래의 공정은 기술자가 웨이퍼들을 서로 다른 장비들 간에 수동으로 이동시키는 대체로 수동 공정이다.
대부분의 비-집적형 종래 시스템들과는 대조적으로, 본 발명의 시스템(100)은 대부분 거의 집적된 또는 완전하게 집적된 시스템이며, 이에 따라 예를 들어 처리 단계들 간에 불필요한 대기 시간이나 정지 시칸을 크게 감소시키거나 제거한다.
시스템(100)은, 하우징(110) 내의 서로 다른 스테이션들에 위치하는 다수의 서로 다른 장치들(장비들)에 의해 정의되는 집적 시스템이다. 도 1에 도시한 바와 같이, 하우징(110)은, 중공 내부(120)를 정의하는 복수의 벽(112)을 갖는 대략 직립 캐비넷 등의 형태로 되어 있다. 중공 내부(120)는, 하우징(110)의 일단에 도시된 문 조립체(130)를 포함한 다수의 서로 다른 액세스 지점들을 통해 액세스가능할 수 있지만, 이러한 문 조립체의 예로 한정되지는 않으며, 하나 이상의 측벽(112)은, 중공 내부(120)를 직접적으로 액세스할 수 있고 볼 수 있게 하며, 더욱 구체적으로는, 내부에 포함된 장비와 처리 스테이션들을 직접적으로 액세스할 수 있고 볼 수 있게 하는 윈도우(140)를 포함할 수 있다. 일 실시예에서, 예시한 바와 같이, 하나의 측벽(112)은 투명 윈도우들(140)과 하나 이상의 액세스 지점(150)을 포함할 수 있다. 반대측 측벽(112)은 도 2에 도시한 바와 같은 문들의 세트 등의 다른 형태의 액세스 지점(150)을 포함할 수 있다.
각 액세스 지점(150)은, 중공 내부(120)로의 입구를 제공하는 개구의 형태로 될 수 있고, 또한, 웨이퍼 유지 및 로딩 장치(로드포트; loadport)(160)는 하나의 측벽(112)을 따라 이러한 위치에 제공될 수 있다. 장치(160)는, 내부에 포함되어 있는 웨이퍼들에 대한 액세스를 유지하고 허용하도록 설계된 임의의 개수의 종래 장치일 수 있고, FOUP 로드포트의 형태로 될 수 있으며, 여기서 FOUP는 "Front Opening Unified Pod" 또는 "Front Opening Universal Pod"의 약어이다. FOUP는, 제어되는 환경에서 실리콘 웨이퍼들을 단단히 안전하게 유지하도록 및 적절한 로드포트와 로보틱 핸들링 시스템을 갖춘 툴(tool)에 의한 처리나 측정을 위해 웨이퍼들이 제거될 수 있도록 설계된 카세트를 내부에 갖는 전용 플라스틱 인클로저이다. 도 1에 예시한 바와 같이, 장치(160)는 입력/출력 카세트 장치의 형태로 될 수 있다.
웨이퍼 유지 및 로딩 장치(로드포트)(160)는, 복수의 웨이퍼를 유지하는 카세트를 수용하고 유지하도록 구성된 하우징을 포함하는 입력/출력 웨이퍼 카세트 장치의 형태로 될 수 있다. 예를 들어, 하우징은 각 단부에 문(162)을 포함할 수 있고, 하나의 문(162)은, 기술자가 하나 이상의 웨이퍼를 로드포트(160) 내로 로딩할 수 있도록 중공 내부(120)로부터 멀어지는 외측을 향한다. 다른 하나의 문(162)은, 중곤 내부(120)로부터의 웨이퍼의 자동화 제거(및 리로딩)가 가능하여 웨이퍼가 중공 내부(120) 내에 포함된 다양한 스테이션들에 이송될 수 있도록 중공 내부(120)를 향하며 중곤 내부 내에 액세스가능하다. 웨이퍼 유지 및 로딩 장치(160)는, 복수의 웨이퍼를 수직 적층 방식으로 유지하기 위한 복수의 랙(rack) 등을 포함하는 유형일 수 있다.
하우징(캐비넷)(110)은, 또한, 웨이퍼가 서로 다른 스테이션들에서 다양한 처리 단계들을 거칠 때 기술자가 하우징(110) 내에서의 웨이퍼의 처리를 제어 및 감시할 수 있게 하며 후술하는 방식으로 동작하는 하나 이상의 컴퓨터 단말(170)을 포함할 수 있다.
또한, 시스템(100)은 동력, 냉각, 가열, 유체 흐름(배관 아키텍처) 등을 제공하기 위한 다수의 서로 다른 종래의 작동 시스템들을 포함할 수 있음을 파악할 것이다. 시스템(100)은, 또한, 시스템(100) 내에서 비정상적 상태가 관찰되는 경우 기술자에게 경고하기 위한 비상 오프 버튼 및 가청 및/또는 가시적 알람을 포함한 다수의 서로 다른 안전 특징부를 포함한다.
도 3은 본 발명의 시스템의 하우징(캐비넷) 내에 포함되는 예시적인 스테이션들을 도시하는 개략도이다. 일반적으로, 시스템(100)은, 전술한 바와 같이 웨이퍼들을 유지하고 하우징(110)의 중공 내부(120)로의 직접적인 액세스를 제공하기 위한 하나 이상의 장치(160)(예를 들어, FOUP 로드포트)를 포함하는 제1 스테이션(200)을 포함한다. 제2 스테이션(210)은, 전술한 바와 같이 웨이퍼의 서로 다른 특성들을 측정하기 위한 하나 이상의 측정 챔버의 형태로 된다. 제3 스테이션(220)은, 웨이퍼에 대하여 단일 웨이퍼 습식 에칭 공정을 수행하기 위한 하나 이상의 에칭 챔버를 포함한다. 제4 스테이션(230) 및 선택 사항으로 제5 스테이션(240)도, 처리된 웨이퍼가 세정되는 세정 챔버이다. 시스템(100)이 자동화 시스템인 결과로, 웨이퍼 이송 장치(300)가 제공되며, 웨이퍼 이송 장치는, 시스템(100)의 다양한 스테이션들 간에 하나 이상의 웨이퍼를 이동시키도록 구성된다. 웨이퍼 이송 장치(300)는, 임의의 개수의 서로 다른 형태를 취할 수 있지만, 일반적으로, 하나 이상의 웨이퍼를 제어가능하게 파지하고, 이동시키고, 해제하도록 구성된 로봇 등의 자동화 장치의 형태로 된다. 일반적으로, 웨이퍼 이송 장치(300)는, 웨이퍼를 파지하고 유지하기 위한 파지(유지) 메커니즘 및 로봇 암이 다수의 방향(다수의 자유도)으로 이동할 수 있게 하는 베이스를 갖는 로봇 암(arm)을 포함한다. 다수의 공정 기능을 갖도록 공정 스테이션들/챔버들 중 하나 이상을 결합할 수 있다는 점을 이해하기 바란다. 예를 들어, 측정 챔버에서 사용되는 측정 장치들은, 측정과 에칭이 결합된 스테이션을 제공하도록 습식 에칭 챔버 내에 통합될 수 있다. 추가 예로, 통상의 기술자가 이해하듯이 에칭 챔버와 세정 챔버가 다중 공정 챔버들로 결합될 수 있다.
따라서, 웨이퍼 이송 장치(300)는 자동화 웨이퍼 핸들러로 간주할 수 있다. 또한, 웨이퍼 이송 장치는 컴퓨터 작동 장치이며, 따라서, 후술하는 바와 같이, 소프트웨어 애플리케이션 등의 실행에 따라 작동한다는 점을 파악할 것이다. 또한, 웨이퍼 이송 장치(300)는, 기술자에 의해 컴퓨터 단말(170) 등의 사용자 인터페이스로 생성되는 커맨드 등의 사용자 생성 커맨드에 응답하여 작동될 수 있다는 점을 파악할 것이다.
도 3에서는, 웨이퍼 이송 장치(300)가 시스템(100)의 내부의 중심에 위치하는 것으로 도시되어 있지만, 웨이퍼 이송 장치(300)가 시스템의 스테이션들의 각각에 액세스할 수 있고 웨이퍼를 필요한 스테이션들의 모두 간에 이송할 수 있는 위치에 웨이퍼 이송 장치(300)가 위치하는 한, 시스템 내의 이러한 중심 위치로 한정되지는 않는다.
전술한 개별적인 스테이션들의 각각을 더욱 상세히 후술한다.
제1 스테이션(200)
전술한 바와 같이, 제1 스테이션(200)은, 웨이퍼들을 밀봉되고 고정된 방식으로 유지하기 위한 하나 이상의 웨이퍼 유지 및 로딩 장치(FOUP 로드포트 또는 입력/출력 카세트)(160)를 포함한다. 임의의 개수의 서로 다른 종래의 웨이퍼 유지 및 로딩 장치들(FOUP 로드포트)(160)이 시스템(100)에서 사용될 수 있다. 통상적으로, 웨이퍼 유지 및 로딩 장치(FOUP 로드포트)(160)는 웨이퍼들을 유지하는 카세트를 포함하는 유형이다. 문(162)은, 웨이퍼 이송 장치(로봇)(300)가 FOUP로부터 웨이퍼들에 직접 액세스할 수 있도록 위치한다. 또한, 웨이퍼 유지 및 로딩 장치(FOUP 로드포트)(160)는, 툴 등의 판독기에 의해 식별될 수 있도록 RFID 태그, 바코드 판독기 등의 인식 특징부들을 포함할 수 있다. 로드포트(160)는 FOUP 유형으로 한정되지 않는다는 점을 이해하기 바란다. 통상의 기술자가 이해하듯이 탈착가능 카세트를 갖는 웨이퍼 박스 등의 카세트에 구축된 FOUP들에 더하여 다양한 웨이퍼 유지 및 로딩 메커니즘을 사용할 수 있다.
도 3에서는 두 개의 블록을 스테이션(200)을 구성하는 것으로서 도시하고 있지만, 이것은, 예시를 위한 것일 뿐이며, 도 1에 도시한 바와 같이, 시스템(100)이 하나보다 많은 웨이퍼 유지 및 로딩 장치(FOUP 로드포트)(160)를 포함할 수 있으므로, 본 발명을 한정하는 것이 아니라는 점을 이해할 것이다. 또한, 각 로드포트(160)가 하나 이상의 카세트를 수용하도록 구성될 수 있다는 점을 이해하기 바란다.
제2 스테이션(210)
전술한 바와 같이, 제2 스테이션(210)은, 웨이퍼의 특성이 측정될 수 있는, 특히, 웨이퍼의 두께가 측정될 수 있는 측정 스테이션(웨이퍼 검사 스테이션)이다. 따라서, 제2 스테이션(210)은 웨이퍼의 하나 이상의 특성을 측정하기 위한 측정 장치(600)를 포함한다. 임의의 개수의 서로 다른 유형의 측정 장치들을 사용할 수 있다. 본 발명의 일 실시예에 따르면, 측정 장치(600)는, 웨이퍼의 하나 이상의 특성(예를 들어, 웨이퍼 두께와 표면 프로파일)을 측정하도록 구성된 촬상 장치의 형태로 된 것이다.
도 4는, 웨이퍼를 고정된 배향으로(예를 들어, 수평 배향으로) 수용 및 유지하기 위한 플랫폼(610)을 포함하는 하나의 예시적인 측정(촬상) 장치(600)를 도시한다. 플랫폼(610)은 크기가 서로 다른 웨이퍼들을 수용하도록 조정가능한 유형일 수 있다. 예를 들어, 웨이퍼들의 직경은 상당히 가변될 수 있으며, 따라서, 플랫폼(610)은 크기가 서로 다른 웨이퍼들이 플랫폼 상에 배치 및 지지될 수 있도록 구성된다. 또한, 플랫폼(160)은, 임의의 개수의 서로 다른 방향(x, y, z)으로 이동할 수 있으며(즉, 플랫폼(610)은 다수의 이동 자유도를 갖고), 웨이퍼가 측정 공정 동안 회전될 수 있도록 회전가능하다.
촬상 장치(600)는, 또한, 적어도 웨이퍼의 두께를 측정하며 또한 웨이퍼에 대한 표면 프로파일을 검출(측정) 및 생성하도록 구성된 비접촉 측정 구성요소(620)를 포함한다. 비접촉 측정 구성요소(620)는, 촬상 장비를 포함할 수 있고, 플랫폼(610) 상에서의 웨이퍼에 대한 구성요소(620)의 이동을 가능하게 하는 자동화 장치의 일부일 수 있다. 예를 들어, 비접촉 측정 구성요소(620)는, 웨이퍼에 대하여 임의의 개수의 서로 다른 방향(x, y, z)으로 이동할 수 있는 암 등의 형태로 된 것일 수 있다(즉, 구성요소(620)는 다수의 이동 자유도를 갖는다). 대안으로 또는 또한, 구성요소(620)는 정지 위치에서 유지될 수 있고, 웨이퍼를 지지하는 플랫폼(610)은 구성요소(620)에 대하여 임의의 개수의 서로 다른 방향(x, y, z)으로 이동 및/또는 회전할 수 있다.
비접촉 측정 구성요소(620)는, 광학 센서(예를 들어, IR 광 센서) 등의 하나 이상의 센서(630), 및 웨이퍼의 표면을 향하는 광원을 포함한다. (웨이퍼와 접촉한 후의) 반사된 광은, 촬상 장치에 의해 및 수집된 정보(및 소프트웨어의 실행에 따라 그 수집된 정보의 처리 후)에 기초하여 수광되며, 웨이퍼의 다수의 서로 다른 측정을 취하여 기록할 수 있다. 더욱 구체적으로, 광은 막 스택(웨이퍼를 형성하는 물질의 층들)의 각 표면의 상부와 하부에서 반사되며, 반사된 광의 거리는 깊이를 산출하도록 물질의 굴절률에 따라 보정된다. 예를 들어, 촬상 장치는, 다음에 따르는 특성들(배타적인 리스트가 아님), 예를 들어, 웨이퍼 두께, 보우(bow), 와프(warp), 평평도, 표면 조도(roughness), 총 두께 변동(TTV), 광학 검사 패턴 인식, TSV 깊이 등을 측정할 수 있다. 촬상 장치의 하나 이상의 구성요소에 대한 한 가지 상업용 소스는 독일의 ISIS Sentronics gmbH이지만, 다른 상업용 소스들을 이용할 수도 있다.
이하에서는 촬상 장치(600)의 동작을 더욱 상세히 설명한다.
종래의 시스템과 대조되는 본 발명의 일 양태에 따르면, 측정 스테이션(210)이 하우징(캐비넷)(110) 내에 직접 통합되어 포함된다. 그 결과, 제2 스테이션(210)과 이에 포함된 촬상 장치(600)는 웨이퍼 이송 장치(로봇)(300)의 도달 범위 내에 있다. 이러한 위치 결정에 의해, 자동화 웨이퍼 이송 장치(300)가 웨이퍼를 제2 스테이션(210)과 시스템(100)의 나머지 스테이션들 중 임의의 스테이션 간에 쉽게 이동시킬 수 있다. 이는, 측정 장비가 원격 위치에 위치하며 측정을 행하도록 에칭 공정으로부터 웨이퍼들이 제거되어야 하는 종래의 시스템과 대조된다. 이러한 측정이 행해진 후에는, 웨이퍼가 에칭 처리 장치 내로 다시 도입되기 전에 웨이퍼가 유지되는 대기 기간이 있다. 이는 복잡성과 시간 지연을 야기하며, 이에 따라, 소저의 기간에 처리될 수 있는 웨이퍼들의 개수에 직접적으로 악영향을 끼친다. 또한, 생산 설정에 있어서, 이러한 비효율로 인해 웨이퍼들이 일괄 처리되고, 여기서 다수의 웨이퍼들은 에칭 처리 장비로 복귀되기 전에 측정된다. 이에 따라, 에칭 공정에 관한 임의의 피드백은, 일괄 처리에서만 얻어질 수 있고 실시간으로 (즉, 웨이퍼 단위로) 얻어질 수 없으며, 이에 따라, 공정 파라미터들을 (웨이퍼 단위로) 실시간으로 조정할 수 없어서 품질이 저하되고 소모물이 증가하게 된다. 본 명세서에서 설명하는 바와 같이 측정 장치를 시스템(100) 내에 통합하고 단일 웨이퍼 습식 에칭 챔버에서의 에칭 전과 에칭 후에 각 웨이퍼에 대한 측정 단계를 포함하는 공정을 구현함으로써, 에칭 공정 파라미터들을 이전에 에칭된 웨이퍼들에 관한 피드백 및 각 웨이퍼의 특정한 특징들에 실시간으로 맞출 수 있는 시스템을 제공하게 된다. 이에 따라, 시스템은, 더욱 높은 품질을 달성할 수 있고, 소모물을 최소화할 수 있고, 단일 웨이퍼 습식 에칭 공정에 일반적으로 연관된 이점들을 얻을 수 있다.
제3 스테이션(220)
제3 스테이션(220)은, 웨이퍼가 단일 웨이퍼 습식 에칭 공정을 거치게 되는 에칭 스테이션이다. 전술한 바와 같이, 단일 웨이퍼 습식 에칭 공정은, 일반적으로, 소정량의 화학 에칭액을 스테이션 내에 배치된 웨이퍼 상으로 분배하고 웨이퍼의 접촉면의 불필요한 부분이 화학 에칭액에 의해 에칭되도록 그 웨이퍼의 접촉면과의 화학 반응을 야기함으로써 수행된다.
도 5에 도시한 바와 같이, 제3 스테이션(220)은, 습식 에칭 공정에서 사용되는 화학 에칭액과 장비를 포함하는 에칭 챔버(인클로저)(410)를 포함하는 단일 웨이퍼 습식 에칭 장치(400)를 포함한다. 따라서, 에칭 챔버(410)는 화학물 포함 구조라 할 수 있다. 습식 에칭이 하나보다 많은 웨이퍼에 대하여 동시에 수행될 수 있도록 제3 스테이션이 예를 들어 수직 적층 배향으로 복수의 에칭 장치(410)를 유지할 수 있음을 이해할 것이다. 인클로저(410)는, 또한, 에칭 공정에서 사용되는 화학물을 수집 및 포함한다.
제3 스테이션(220)에 위치하는 습식 에칭 장치(400)는, 또한, 웨이퍼가 안착되는 (본 명세서에서 설명하는 전체 공정 제어 시스템의 일부인 에칭 컨트롤러(401)에 의해 가변 속도 제어되는) 스핀 척(spin chuck)(420), 및 유체(예를 들어, 하나 이상의 액체, 바람직하게는, 화학 에칭액)를 분배하는 하나 이상의 노즐(오리피스)(435)을 포함하는 에칭 툴(암)(430)을 포함한다. 에칭 툴(430)은, 다수의 방향(x, y, z 방향)을 따라 이동가능하며 이에 따라 다수의 자유도를 갖는 암의 형태로 된 것일 수 있다. 에칭 툴(430)은, 본 명세서에서 설명하는 바와 같이 에칭 컨트롤러(401) 등의 컴퓨팅 장치에 의해 제어되며 시스템(100)에서 채택되는 전체 프로그래밍가능 컴퓨터 시스템의 일부이라는 점에서 제어가능 툴이다. 그 결과, 에칭 툴(430)은 웨이퍼의 임의의 특정 위치 등으로 구동될 수 있다.
습식 에칭 장치(400)는, 또한, 에칭 화학물을 도입하고 이러한 화학물을 챔버로부터 제거하기 위한 유체 전달 및 유체 제거 시스템을 포함한다. 이러한 구성요소들은, 노즐(435)에 유체(예를 들어, 하나 이상의 액체, 바람직하게는, 화학 에칭액)를 공급하기 위한 도관들이 제공되는 종래의 유체 배관 기법을 이용하여 구현된다. 또한, 습식 에칭 장치(400)는, 습식 에칭 공정 동안 인클로저(410) 내에 축적되는 유체(들)를 방출하기 위한 도관과 메커니즘을 포함한다.
기계 척(420)은 척(420)이 웨이퍼를 유지할 수 있게 한다. 척(420)은, 스핀 척(420)에 의해 유지되는 웨이퍼가 Z축을 중심으로 스핀 회전할 수 있도록 모터의 구동 샤프트에 연결될 수 있는 메인 샤프트(도시하지 않음)를 포함한다. 모터의 전원 스위치는 에칭 컨트롤러(401)의 출력측에 접속되며, 그 결과, 모터의 회전 속도가 컨트롤러(401)에 의해 제어된다. 또한, 스핀 척(420)은 Z축의 방향으로 이동할 수 있도록 리프트 메커니즘(도시하지 않음)에 의해 지지될 수 있다.
통상적으로, 스핀 척(420)의 외측 주연부와 하부 주위에는, 웨이퍼로부터 원심 분리된 후 외부로 방출되는 에칭 용액을 수용 및 수집하기 위한 구조가 제공된다. 인클로저(410)로부터 유체(들)를 방출하기 위한 메커니즘의 일부는, 척(420)을 둘러싸는 수집기 구조의 하부에 형성되는 배기 가스 통로와 드레인 파이프일 수 있다. 수집기 구조에 저장된 액체는 하나 이상의 드레인 파이프를 통해 외부로 방출될 수 있고 또는 재순환될 수 있다.
본 발명에 따르면, 임의의 개수의 적절한 에칭 용액들은, 습식 에칭 공정에 적절하고 의도하는 기판 및 응용분야에 적절하기만 하면 사용될 수 있다. 따라서, 웨이퍼의 특성을 고려하는 것을 비롯하여 다수의 서로 다른 파라미터들에 기초하여 서로 다른 화학물들을 사용할 수 있다.
에칭 용액의 전달에 관하여, 습식 에칭 장치(400)는, 또한, 에칭 용액의 온도와 흐름 특성들(유속)을 제어하기 위한 수단을 포함한다. 작동 시스템은, 액체 공급원으로부터 노즐로 연장되는 펌프나 밸브를 비롯한 하나 이상의 제1유속 제어 섹션을 포함할 수 있지만, 이러한 펌프나 밸브로 한정되지는 않는다. 유속 제어 섹션의 작동 섹션은, 노즐에 공급되는 에칭 용액의 유속을 제어하도록 에칭 컨트롤러(401)의 출력측에 연결될 수 있다. 또한, 다른 제어 메커니즘을 사용하여 에칭 용액의 농도를 제어할 수 있다. 에칭액의 농도 제어는 소정의 웨이퍼에 대한 전체 에칭 속도와 에칭 공정을 제어하기 위한 한 가지 수단이다.
본 발명의 일 양태에 따르면, 습식 에칭 장치(400)는 종점 검출 장치(500)를 포함한다. 한 가지 예시적인 종점 검출 장치(500)는, 광 방출기(510)(예를 들어, 고 강도 백색 광 방출기) 및 광 검출기(520)(예를 들어, 전하 결합 소자(CCD) 검출기)를 포함한다. 광 방출기(510)는 사용되는 특정 응용분야에 따라 서로 다른 구성을 가질 수 있으며, 일 실시예에서, 광 방출기가 적색 필터를 갖는 고 강도 백색광 방출기라는 점을 파악할 것이다. 이하에서는, 종점 검출 장치(500)의 동작을 더욱 상세히 설명하지만, 종점 검출 장치(500)는 에칭 컨트롤러(401)나 컴퓨팅 장치(170) 등의 컴퓨팅 장치에 응답하고, 광 방출 장치(510)는 습식 에칭 스테이션(220)에 있는 특정 웨이퍼의 표면의 적어도 일부 상으로 광(예를 들어, 백색 광)을 방출한다. 본 명세서에서 더 설명하는 바와 같이, 광 검출기(520)(예를 들어, CCD 검출기)는 특정 웨이퍼의 일부에 의해 반사되는 광을 검출하고, CCD 검출기(520)는 검출된 광 정보를 공정 제어 시스템에 송신한다. 본 명세서에서 설명하는 바와 같이, 종점 검출 장치(500)는, 비아 물질들을 정밀하고도 균일한 깊이로 노출시키도록 본 발명에 의해 유리하게 채택된다. 종점 검출 장치(500)는 전술한 장비들로 형성되는 것으로 한정되지 않지만, 일반적으로, 기판의 특성이나 상태를 결정하도록 광 특징들이 분석되는 광학계 시스템이라는 점을 파악할 것이다.
제4 및 제5 스테이션(230, 240)
웨이퍼가 에칭 스테이션(220)에서의 처리를 거친 후, 웨이퍼는 하나 이상의 웨이퍼 세정 스테이션에서 세정된다. 도 3은 두 개의 개별적인 세정 스테이션(230, 240)을 도시하지만, 이는 일 실시예를 나타낼 뿐이며, 단일 세정 스테이션을 사용할 수 있음을 파악할 것이다. 이러한 구성에서, 단일 세정 스테이션은 웨이퍼를 세정하도록 하나 이상의 서로 다른 세정 기술을 여전히 채택할 수 있다.
도 6a에 도시한 바와 같이, 세정 스테이션(230)은, 더욱 큰 잔여 입자들과 에칭 잔여물을 제거하도록 웨이퍼 상에 세정액이 분배되는 동안 웨이퍼가 스크러빙되는 (스크러빙 또는 브러시 박스형의) 웨이퍼 세정 장치(1600)일 수 있다. 더욱 구체적으로, 웨이퍼 세정 장치(1600)는, 장비를 포함하고 세정 공정에서 사용되는 주입된 세정액을 포함하는 챔버(인클로저)(1610)를 포함할 수 있다. 따라서, 챔버는, 적어도 부분적으로 밀봉된 환경이며, 세정할 웨이퍼를 지지하기 위한 척(1620)(예를 들어, 스핀, 회전 척)을 포함하는 웨이퍼 스크러빙 장치(1615)를 포함할 수 있다. 웨이퍼 스크러빙 장치는, 또한, 웨이퍼를 스크러빙하기 위한 하나 이상의 브러시(1630)를 포함하는 브러시 메커니즘을 포함한다. 브러시 메커니즘은, 또한, 웨이퍼의 표면에 걸쳐 하나 이상의 제어되는 방향(예를 들어, 방사상 방향)을 따라, 브러시들을 회전시키기 위한 구동 메커니즘(1640), 브러시들을 클램핑 및 언클램핑하기 위한 클램핑 메커니즘, 및 브러시들을 구동하기 위한 모터를 포함한다.
예시적인 스크러빙 공정 동안, 미립자들을 세정 제거하도록 물의 스트림 또는 세정액의 스트림을 회전하고 있는 웨이퍼의 양면으로 향하게 하는 것이 바람직하다. 이는, 통상적으로, 웨이퍼의 위 및/또는 아래에 위치하는 스프레이 노즐들(1650)을 제공함으로써 달성된다. 스프레이 노즐들은 바람직하게 공급 파이프를 통해 순수 또는 세정액의 소스에 연결된다. 물 또는 세정액의 유속은, 펌프와 밸브 장치(도시하지 않음)에 의해 제어될 수 있으며, 펌프와 밸브 장치는 다시 (본 명세서에서 설명하는 전체 공정 제어 시스템의 일부인) 세정 컨트롤러(1601)에 의해 제어된다. 대안으로, 가압된 유체 소스를 사용하여 유체 흐름을 제공할 수 있다.
세정 스테이션(240)은, 세정 스테이션(230)에 근접하여 위치하며 웨이퍼가 세정 스테이션(230)에서 채택되는 세정 공정과는 다른 세정 공정을 거치는 유형인 물리적으로 다른 스테이션일 수 있다. 세정 스테이션(240)은 최종 세정 스테이션이라 할 수 있다. 전술한 바와 같이, 제1세정 단계는, 더욱 큰 입자들 및 잔여 에칭액을 주로 제거하는 스크러빙 공정에 연관된다. 웨이퍼는 제1세정 스테이션(230)으로부터 최종 세정 스테이션(240)으로 이송될 수 있다.
도 6b에 도시한 바와 같이, 세정 스테이션(230)과 마찬가지로, 최종 세정 장치(1700)는, 챔버(1710)의 형태일 수 있으며, 웨이퍼 상으로 고속 스프레이를 분배하고 및/또는 작은 입자들을 웨이퍼 표면으로부터 제거하기 위한 메가소닉 세정 장치(1780)를 사용하도록 하나 이상의 암(1740)과 노즐(1750)을 포함한다. 또한, 최종 세정 스테이션(240)은 최종 세정 공정의 종료시 웨이퍼를 건조시키기 위한 건조 장치(1790)를 포함할 수 있다.
시스템(100)을 이용한 습식 에칭 공정
도 7a는, 습식 에칭 공정을 수행하기 위한 시스템(100)과 함께 사용하기 위한 공정 제어 시스템(700)의 예시적인 구성을 예시하는 고-레벨 도이다. 일례로, 공정 제어 시스템은 공정 컨트롤러(705)를 포함하는 하나 이상의 컴퓨팅 장치로 이루어진다. 공정 컨트롤러(705)는, 사실상 본 명세서에서 설명하는 시스템 및/또는 방법을 구체화할 수 있는 임의의 컴퓨팅 장치 및/또는 데이터 처리 장치일 수 있음을 이해하기 바란다.
공정 컨트롤러(705)는, 제1 스테이션(200), 제2 스테이션(210), 제3 스테이션(220), 제4 스테이션(230), 제5 스테이션(240)을 포함하는 시스템(100)의 다양한 컴퓨터 제어형 구성요소들, 및 전자 정보를 그 다양한 구성요소들에 송신하거나 그 다양한 구성요소들로부터 수신하는, 웨이퍼 이송 장치(300), FOUP 로드포트(160), 촬상 장치(600), 에칭 컨트롤러(401), 종점 검출 장치(500) 및 세정 컨트롤러(1601)를 포함하는 컴퓨터 제어형 장치나 이에 연관된 컨트롤러와 통신하도록 구성될 수 있지만, 이러한 예들로 한정되지는 않는다.
도 7a에서는 공정 컨트롤러(705)에 관하여 공정 제어 시스템(700)을 도시하고 있지만, 임의의 개수의 공정 컨트롤러가 공정 제어 시스템(700) 및 시스템(100)을 구성하는 컴퓨터 제어형 구성요소들과 본 명세서에서 설명하는 방식으로 상호 작용할 수 있다는 점을 이해해야 하는 점에 주목한다. 또한, 컴퓨터 단말(170), 공정 컨트롤러(705), 제1 스테이션(200), 제2 스테이션(210), 제3 스테이션(220), 제4 스테이션(230), 제5 스테이션(240)을 포함하지만 이러한 예들로 한정되지는 않는 본 명세서에서 언급하는 다양한 컴퓨팅 장치와 기계, 및 웨이퍼 이송 장치(300), FOUP 로드포트(160), 촬상 장치(600), 에칭 컨트롤러(401), 종점 검출 장치(500), 및 세정 컨트롤러(1601)를 포함하지만 이러한 예들로 한정되지는 않는 컴퓨터 제어형 장치나 이에 연관된 컨트롤러가 본 명세서에서 개별적인/단일 장치 및/또는 기계로서 지칭되고 있지만, 일부 구현예에서, 언급된 장치와 기계, 및 이들의 연관된 및/또는 수반되는 동작, 특징, 및/또는 기능은, 통상의 기술자에게 알려져 있듯이, 직접적인 접속 또는 네트워크 접속 등을 통해 임의의 개수의 장치 및/또는 기계에 걸쳐 배치 또는 그외에는 채택될 수 있다는 점을 이해하기 바란다.
도 7b는 습식 에칭 공정을 수행하기 위한 시스템(100)의 공정 컨트롤러(705)의 예시적인 구성을 예시하는 블록도이다. 공정 컨트롤러는, 프로세서(710), 메모리(720), 디스플레이(740), 저장 장치(790), 및 통신 인터페이스(750)를 비롯한, 시스템의 동작을 활성화하도록 기능하는 다양한 하드웨어 및 소프트웨어 구성요소들을 포함한다. 프로세서(710)는 메모리(720)에 로딩될 수 있는 소프트웨어 명령어를 실행하도록 기능한다. 프로세서(710)는, 특정 구현예에 따라 다수의 프로세서, 멀티프로세서 코어, 또는 일부 다른 유형의 프로세서일 수 있다.
바람직하게, 메모리(720) 및/또는 저장 장치(790)는 프로세서(710)에 의해 액세스가능하며, 이에 따라 프로세서가 메모리 및/또는 저장 장치에 저장된 명령어를 수신 및 실행할 수 있다. 메모리는, 예를 들어, RAM 또는 다른 임의의 적절한 휘발성 또는 비취발성 컴퓨터 판독가능 저장 매체일 수 있다. 또한, 메모리는 고정형 또는 탈착형일 수 있다. 저장 장치(790)는 특정 구현예에 따라 다양한 형태를 취할 수 있다. 예를 들어, 저장 장치는, 하드 드라이브, 플래시 메모리, 재기입가능 광 디스크, 재기입가능 자기 테이프, 또는 이들의 소정의 조합 등의 하나 이상의 구성요소나 장치를 포함할 수 있다. 저장 장치는 또한 고정형 또는 탈착형일 수 있다.
하나 이상의 소프트웨어 모듈(730)은 저장 장치(790) 및/또는 메모리(720)에 인코딩된다. 소프트웨어 모듈은, 프로세서(710)에서 실행되는 명령어들의 세트 또는 컴퓨터 프로그램 코드를 갖는 하나 이상의 소프트웨어 프로그램 또는 애플리케이션을 포함할 수 있다. 본 명세서에서 개시하는 시스템 및 방법의 양태를 위한 동작을 실행하는 이러한 컴퓨터 프로그램 코드 또는 명령어는, 하나 이상의 프로그래밍 언어의 임의의 조합으로 기입될 수 있다. 프로그램 코드는, 공정 컨트롤러(705)에서 독립형 소프트웨어 패키지로서 전적으로, 공정 컨트롤러에서 부분적으로, 또는 다른 컴퓨팅/장치에서 전적으로 또는 다른 원격 컴퓨팅/장치에서 부분적으로 실행될 수 있다. 후자의 경우에, 원격 컴퓨팅 장치는, LAN 또는 WAN을 포함한 임의의 유형의 직접적인 전자 접속이나 네트워크를 통해 공정 컨트롤러에 접속될 수 있고, 또는, (예를 들어, 인터넷 서비스 제공자를 이용하는 인터넷을 이용하여) 외부 컴퓨터에 대한 접속을 이룰 수 있다.
바람직하게, 소프트웨어 모듈(730)에는, 프로세서(710)에 의해 실행되는, 촬상 모듈(770), 종점 검출 모듈(772), 에칭 레시피 모듈(774), 세정 제어 모듈(776), 및 데이터베이스 모듈(778)과 디스플레이 모듈(780)이 포함된다. 소프트웨어 모듈(730)의 실행 동안, 프로세서는, 더욱 상세히 후술하는 바와 같이, 습식 에칭 공정을 수행하기 위한 시스템(100)에 관한 다양한 연산들을 수행하도록 공정 컨트롤러(705)를 구성한다.
또한, (메모리(720) 및/또는 저장 장치(790) 등의) 하나 이상의 컴퓨터 판독가능 저장 장치 및 소프트웨어 모듈들(730)의 프로그램 코드는, 통상의 기술자에게 알려져 있듯이, 본 발명에 따라 제조 및/또는 배포될 수 있는 컴퓨터 프로그램 제품을 형성한다고 할 수 있다.
예시적인 일부 실시예들에서, 소프트웨어 모듈들(730) 중 하나 이상은 시스템(100) 내에서 사용하도록 통신 인터페이스(750)를 통해 다른 장치나 시스템으로부터 저장 장치(790)로 다운로드될 수 있다는 점을 이해하기 바란다. 또한, 더욱 상세히 후술하는 바와 같이, 본 시스템 및 방법의 동작에 관한 데이터 및/또는 기타 정보(데이터베이스(785) 등)도 저장 장치에 저장될 수 있다는 점에 주목한다.
또한, 바람직하게, 데이터베이스(785)가 저장 장치(790)에 저장된다. 더욱 상세히 후술하는 바와 같이, 데이터베이스는, 시스템(100)의 다양한 동작들에 걸쳐 이용되는 다양한 데이터 항목들과 요소들을 포함 및/또는 유지한다. 데이터베이스에 저장된 정보는, 본 명세서에서 더욱 상세히 설명하듯이, 파라미터 조정 알고리즘, 레시피, 화학 혼합물 상세, 설정점, 설정, 알람, 공정 변수들에 대한 실제 값, 및 공정 컨트롤러에 의해 수집 및 분석된 이력 데이터를(예를 들어, 일괄 기록, 기판 두께 측정 정보, 비아 깊이 측정 정보) 포함할 수 있지만, 이러한 예들로 한정되지 않는다. 데이터베이스는 공정 컨트롤러(705)에 대하여 국부적으로 구성된 것으로 도시되어 있지만, 일부 구현 예에서, 데이터베이스 및/또는 그 내부에 저장된 다양한 데이터 요소들은 (예를 들어, 도시하지 않은 원격 컴퓨팅 장치나 서버 등에) 원격 위치할 수 있고 네트워크를 통해 또는 통상의 기술자에게 알려져 있는 방식으로 공정 컨트롤러에 접속될 수 있다는 점에 주목한다.
인터페이스(715)도 프로세서(710)에 동작가능하게 접속된다. 인터페이스는, 전자 컴퓨팅 장치 분야에서 이해할 수 있는, 스위치(들), 버튼(들), 키(들), 터치 스크린, 마이크 등의 하나 이상의 입력 장치(들)일 수 있다. 인터페이스는, 시스템(100)의 동작에 관한 설정 또는 온-오프 커맨드 등의 사용자로부터의 커맨드의 캡처를 용이하게 하도록 기능한다.
디스플레이(740)도 프로세서(710)에 동작가능하게 접속된다. 디스플레이는, 제어 설정, 커맨드 프롬프트, 시스템(100)의 다양한 구성요소들에 의해 수집되어 공정 컨트롤러에 제공되는 데이터를 포함한 시스템(100)의 동작에 관한 정보를 사용자가 볼 수 있게 하는 스크린 또는 다른 임의의 이러한 프리젠테이션 장치를 포함한다. 예를 들어, 디스플레이는 도트 매트릭스 디스플레이 또는 기타 2차원 디스플레이 등의 디지털 디스플레이일 수 있다.
추가 예로, 인터페이스와 디스플레이는 터치 스크린 디스플레이에 집적될 수 있다. 이에 따라, 스크린은, 다양한 데이터를 표시할 수 있고 사용자가 정보를 입력할 수 있는 필드를 포함하는 "형태"를 제공할 수 있는 그래픽 유저 인터페이스를 도시하는 데 사용된다. 그래픽 유저 인터페이스의 디스플레이에 대응하는 위치에서 터치 스크린을 터치함으로써, 사람이 장치와 상호 작용하여 데이터 입력, 설정 변경, 기능 제어 등을 행할 수 있다. 따라서, 터치 스크린이 터치되면, 인터페이스는 이 변화를 프로세서에 통신하고, 설정은 변경될 수 있고, 또는, 사용자가 입력한 정보가 캡처되어 메모리에 저장될 수 있다.
오디오 출력부(760)도 프로세서(710)에 동작가능하게 접속된다. 오디오 출력부는, 통상의 기술자가 이해하듯이, 전자 오디오 파일을 재생하거나 오디오 톤을 생성하도록 구성된 임의의 유형의 스피커 시스템일 수 있다. 오디오 출력부는 공정 컨트롤러(705)에 집적될 수 있고 또는 공정 컨트롤러(705)의 외부에 있을 수 있다.
통신 인터페이스(750)도, 프로세서(710)에 동작가능하게 접속되며, (로봇, 촬상 장치, 에칭 컨트롤러, 세정 컨트롤러, 화학물 컨트롤러를 포함한) 공정 컨트롤러(705)와 외부 장치, 기계 및/또는 요소 간의 통신을 가능하게 하는 임의의 인터페이스일 수 있다. 바람직하게, 통신 인터페이스는, 이더넷, IEEE 1394, Parallel, PS/2, Serial, USB, VGA, DVI, SCSI, HDMI, 네트워크 인터페이스 카드(NIC), 집적된 네트워크 인터페이스, 무선 주파수 송신기/수신기(예를 들어, 블루투스, 셀룰러, NFC), 위성 통신 송신기/수신기, 적외선 포트 및/또는 공정 컨트롤러(705)를 다른 컴퓨팅 장치 및/또는 사설 네트워크와 인터넷 등의 통신 네트워크에 접속하기 위한 다른 임의의 이러한 인터페이스를 포함하지만, 이러한 예들로 한정되지는 않는다. 이러한 접속은, (예를 들어, RS232 표준을 이용한) 유선 접속 또는 (예를 들어, 802.11 표준을 이용한) 무선 접속을 포함할 수 있지만, 통신 인터페이스가 사실상 공정 컨트롤러(705)와의 통신을 가능하게 하는 임의의 인터페이스일 수 있다는 점을 이해하기 바란다.
습식 에칭 공정을 수행하기 위한 시스템(100)의 동작 동안 다양한 지점에서, 공정 컨트롤러(705)는, 본 명세서에서 더욱 상세히 추가로 설명하는 바와 같이, 하나 이상의 컴퓨팅 장치, 예를 들어, 다양한 공정 스테이션들과 구성 장치들을 작동시키는 데 사용되는 컴퓨팅 장치와 통신할 수 있다. 이러한 컴퓨팅 장치는, 더욱 상세히 후술하는 바와 같이, 공정 컨트롤러(705)에 대하여 및 서로 간에 데이터를 송신 및/또는 수신할 수 있고, 이에 따라, 바람직하게 시스템(100)의 동작을 초기화, 유지, 및/또는 향상시킬 수 있다.
습식 에칭 공정을 수행하기 위한 시스템(100)의 동작 및 전술한 다양한 요소들과 구성요소들은, 도 7, 도 8, 도 9a 내지 도 9i, 도 10 및 도 11과 함께 후술하는 바와 같이 TSV들을 노출시키는 공정을 참조하여 더욱 파악할 수 있을 것이다.
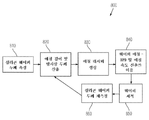
도 8은 본 발명의 일 실시예에 따라 시스템(100)을 이용하여 웨이퍼를 에칭하기 위한 공정 흐름(800)을 예시하는 흐름도이다. 예시적인 공정은 오버버든(overburden) 층으로 인해 TSV들이 기판의 상부면 상에 노출되지 않는 후 연삭(post grind) TSV 기판(즉, 웨이퍼)에 대하여 수행될 수 있다는 점을 이해하기 바란다. 또한, 기판의 하부면은, 기판마다 두께가 가변될 수 있는 접착층에 의해 캐리어에 장착된다. 그러나, 기판은, 통상의 기술자가 이해하듯이 대체 캐리어 구성 및 비-캐리어 구성에서 예시적인 공정이 기판에 대하여 동작할 수 있으므로, 이러한 특정 캐리어 구성으로 한정되지 않는다는 점을 이해하기 바란다. 예시적인 공정은, TSV들을 원하는 깊이와 기판 표면 균일도로 노출하게끔 시스템(100)을 이용하여 습식 에칭 기판과 오버버든의 두께를 결정하도록 특정화된 계측을 제공한다. 공정 흐름은 일반적으로 TSV 기판에 관하여 설명되고 있지만, 예시적인 공정은 비-TSV 기판에 대하여 수행될 수 있고, 시스템(100)을 이용하여 원하는 두께와 기판 표면 균일도로 기판과 습식 에칭 비-TSV 기판의 두께를 결정하도록 특정화된 계측을 제공한다는 점을 이해하기 바란다.
공정 블록(810)에서, 시스템(100)은 특정 기판의 두께를 측정한다. 공정 블록(820)에서, 시스템은 공정 블록(810)에서 취한 두께 측정에 따라 특정 기판에 대한 에칭 깊이와 방사상 두께를 산출한다. 공정 블록(830)에서, 시스템은 특정 기판에 대한 원하는 에칭 프로파일을 달성하도록 특정 기판에 대한 에칭 레시피를 생성한다. 공정 블록(840)에서, 시스템은 에칭 레시피에 따라 특정 기판을 에칭한다. 공정 블록(840)에서 특정 기판을 에칭하는 단계는 본 명세서에서 더 설명하는 바와 같이 종점 검출 공정을 더 포함할 수 있다. 공정 블록(850)에서, 시스템은 임의의 잔여 입자들, 이온들, 및 에칭액을 제거하도록 기판을 세정한다. 공정 블록(860)에서, 시스템은, 특정 기판의 두께를 측정하고, 이에 따라 기판의 물성을 분석하고 에칭 레시피의 효능을 평가하고 공정 흐름(800)을 거치는 후속 기판에 대한 에칭 레시피를 조정하도록 두께 측정값을 공정 컨트롤러에 제공한다.
각 공정 블록에서 후속하는 특정한 단계들을 도 7a, 도 7b, 도 8, 도 9a 내지 도 9i, 도 10 및 도 11과 함께 더 설명한다. 도면에 도시하고 본 명세서에서 설명한 것보다 적거나 많은 동작을 수행할 수 있다는 점을 파악하기 바란다. 이러한 동작들은, 또한, 본 명세서에서 설명하는 순서와는 다른 순서로 수행될 수 있고, 다단계 공정들에 결합될 수 있고 또는 서브루틴으로 나누어질 수 있다. 단계들은 시스템(100)의 맥락에서 설명하고 있지만, 단계들의 실시는 도 1 내지 도 7에 설명한 바와 같은 시스템(100)의 예시적인 구성으로 한정되지 않는다.
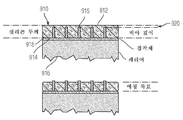
공정은, 소프트웨어 모듈들(730) 중 하나 이상, 바람직하게는, 촬상 모듈(772)을 실행하는 프로세서(710)가 촬상 장치로 하여금 특정 기판에 대한 두께 정보를 수집하게끔 공정 컨트롤러(705)를 구성하는 블록/단계(810)에서 시작된다. 도 9a는, TSV들을 표출하기 전에 예시적인 후 연삭 TSV 기판(910)의 단면도를 도시한다. 기판은, 상부면(912), 접착층(918)에 의해 캐리어(916)에 장착된 하부면(914), 및 기판(910) 전체에 걸쳐 이격된 TSV들(915)을 포함한다. 연삭 공정은, (기판 두께 변동 내에서) 두께가 가변(에지에서 더욱 커지고, 기판 전체에 걸쳐 균일하고, 또는 에지에서보다 기판의 중심에서 더욱 커짐)될 수 있는 오버버든 층(920)(예를 들어, TSV들 위의 기판 물질)을 남겨 둔다. 마찬가지로, 기판마다(기판 두께 변동) TSV들 위의 기판 물질의 높이의 차이가 있을 수 있다. TSV들 위의 층에서의 이러한 차이는 노출된 비아들의 높이의 허용가능한 차이보다 클 수 있다. 또한, 접착층도 두께와 균일도 면에서 가변될 수 있어서, 비아의 단부 위에서 상부 실리콘 기판에 남아 있는 물질의 두께와 균일도의 결정시 외부 측정의 효과가 없게 된다. 도 9a는 또한 예시적인 후 에칭 TSV 기판의 단면을 도시한다.
촬상 장치는, 기판을 광학 주사함으로써 표면에 걸친 기판의 실제 두께를 측정한다(기판의 두께, 총 두께 변동(TTV; 기판에 대하여 측정되는 최소 두께와 최대 두께 간의 차이를 나타냄), 기판 평평도(예를 들어, 웨이퍼 보우), 표면 조도를 포함할 수 있고 그 외에는 기판의 토포그래피를 분석할 수 있는) 두께 정보를 결정하도록 기판을 광학 주사하는 다양한 방법들은, 통상의 기술자에게 알려져 있으며 본 발명에서 사용하는 데 적합하다. 바람직하게, 촬상 장치(600)는, 기판의 표면의 대표적인 샘플을 주사하고, 두께 정보, 바람직하게는, 대표적인 샘플에 대한 기판 두께를 수집하고, 두께 정보를 공정 컨트롤러(705)에 송신한다. 샘플 크기(기판 표면에 걸쳐 수집된 데이터 지점들의 개수)는, 처리된 기판의 응용분야에 의해 요구되는 상세 레벨에 따라 조정될 수 있으며, 전체 표면의 상세 주사 내지 표면에 걸친 몇 개의 데이터 지점의 범위로 될 수 있다. 더욱 구체적으로, 두께 측정값은 기판 상의 다양한 위치에서 수집될 수 있고, 측정값을 이용하여 중간 위치들에서의 두께를 두 개의 데이터 지점 간의 거리의 함수로서 보간할 수 있다. 다시 말하면, 본 발명의 소프트웨어는 이러한 측정값을 생성하기 위한 보간 연산을 수행할 수 있다.
바람직하게 촬상 모듈(770) 또는 데이터베이스 모듈(778)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 또한, 본 명세서에서 더 설명하는 바와 같이 추가 처리를 위해 두께 정보를 저장 장치(790)나 메모리(720)에 기록하도록 공정 컨트롤러(705)를 구성할 수 있다.
이어서, 단계(820)에서, 바람직하게 기판 두께 모듈(770)을 포함하는 소프트웨어 모듈들(730) 중 하나 이상을 실행하는 프로세서(710)는, 기판이 더욱 두껍거나 얇은(예를 들어, 에지에서 두껍고, 균일하거나, 중심에서 두꺼운) 특정 기판의 표면의 방사상으로 정의된 영역들 및 소정의 반경에서 제거될 물질의 양을 식별하게끔 에칭 깊이와 특정 기판의 방사상 두께를 결정하도록 공정 컨트롤러(705)를 구성한다.
방사상 두께는 소정의 반경에서의 기판의 평균 두께이다. 마찬가지로, 특정 기판의 표면 균일도는 방사상 두께가 웨이퍼의 표면에 걸쳐 어떻게 가변되는지를 나타내는 측정값이다. 방사상 두께는, 두께의 방사상 의존형 비-균일도를 식별하도록 사용되는데, 즉, 기판의 표면의 어떠한 방사상 영역들에서 오버버든이 다른 영역들보다 많이 제거되어야 하는지를 식별하는 데 사용된다. 방사상 두께는, 기판의 소정의 반경 주위로 단계(810)에서 측정되는 특정 기판의 평균 두께의 함수인 알고리즘에 따라 산출될 수 있다. 도 9b는 공정 컨트롤러에 의해 생성될 수 있고 디스플레이(740)에 의해 표시될 수 있는 예시적인 기판의 방사상 두께의 그래픽 표현 또는 링 맵의 스크린 샷을 도시한다. 도 9c는 예시적인 기판의 표면에 걸친 실제 두께의 그래픽 표현 또는 표면 맵을 도시한다.
에칭 깊이는 기판의 표면으로부터 제거할 물질의 원하는 깊이이다. 에칭 깊이를 결정하는 방법은, 의도하는 기판의 응용분야 및 기판의 유형에 따라 가변될 수 있다.
TSV들을 표출하도록 기판을 에칭하는 경우, 에칭 깊이는 TSV들의 상부와 기판의 상부면 간의 오버버든의 두께이다. 또한, 에칭 깊이는 표출된 TSV들의 원하는 높이(TSV 표출 높이)의 함수일 수도 있다. 바람직하게, 에칭 깊이는, 방사상 두께로부터 TSV들의 기준 높이와 원하는 TSV 표출 높이를 빼는 알고리즘에 따라 특정 기판의 표면 상의 방사상 위치의 샘플에 대하여 결정된다. 이에 따라, 에칭 깊이는, 반경의 함수이며, 오버버든 두께에 있어서 방사상 의존형 비-균일도를 최소화하도록 조정될 수 있다.
특정 기판의 TSV들의 기준 높이는 특정 기판의 제조사로부터 얻어질 수 있다. 대안으로 또는 또한, 기준 높이는 하나 이상의 에칭된 기판의 TSV들의 실제 높이의 측정칼의 함수일 수도 있다.
비-TSV 기판을 에칭하는 경우, 예를 들어, 웨이퍼 박막화 공정의 경우, 에칭 깊이는, 방사상 두께 및 TTV(총 두께 변동)를 포함한 기타 두께 관련 정보의 함수로서 산출될 수 있다. 이에 따라, 에칭 깊이는, 전체 두께 균일도, 에칭되는 비-TSV 기판의 표면 균일도를 개선하도록 조정될 수 있다.
이어서, 단계(830)에서, 바람직하게 에칭 레시피 모듈(778)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 원하는 에칭 프로파일을 얻기 위해 특정 기판을 에칭하는 에칭 장치(400)에 의해 실행될 수 있는 특정 기판에 대한 에칭 레시피를 생성하도록 공정 컨트롤러(705)를 구성할 수 있다.
일반적으로, 에칭 프로파일은 단계(820)에서 결정된 바와 같은 에칭 깊이를 포함한다. 또한, 에칭 프로파일은, 표면 조도를 포함한 원하는 물리적 특징을 달성하도록 특정 기판에 행해질 필요가 있는 기타 변경을 포함할 수 있지만, 표면 조도의 예로 한정되지는 않는다. 이에 따라, 에칭 프로파일은, 처리된 기판의 응용분야 의존형 물리적 특징들, 비제한적인 예를 들면, 원하는 표면 조도, 원하는 TSV 표출 높이, 원하는 기판 두께의 함수이며, 또한, 비아 깊이와 방사상 두께를 포함한 특정 기판의 실제 물리적 특징들의 함수이다.
예를 들어, 표면 조도에 관하여, 일례로, 금속 증착 응용분야에서는 약간의 표면 조도가 부착성을 개선할 수 있는 한편, 기판 결합 응용분야에서는 매우 매끄러운 표면이 필요하다.
에칭 레시피는 특정 기판의 에칭 프로파일의 함수인 알고리즘에 따라 생성된다. 에칭 레시피는, 물질이 제거되어야 하는 특정 기판의 표면 상의 방사상 위치에 관한 다양한 단일 웨이퍼 습식 에칭 공정 제어 파라미터들 및 원하는 에칭 프로파일을 달성하도록 제거할 물질의 양으로 이루어진다.
다양한 파라미터들은, 화학 에칭액을 기판 상으로 분배하는 노즐(435) 및 에칭 툴(430)(암이라고도 함)의 방사상 위치를 비롯하여 에칭이 집중되는 기판의 표면 상의 방사상 위치, 암 주사 속도, 가속, 감속, 및 노즐 높이를 제어하도록 조정될 수 있지만, 이러한 예들로 한정되지는 않는다. 특정한 방사상 위치에서 에칭액을 기판 상으로 분배하는 것은 일반적으로 에칭 공정을 기판의 특정한 반경에 국한하는 것이며 이처럼 암과 노즐의 위치와 이동이 에칭의 위치를 제어한다는 점을 이해할 수 있다. 암 주사 속도는, 화학 에칭액을 분배하는 노즐과 암이 기판 상의 한 위치로부터 다른 위치로 이동하는 속도이며, 가속과 감속은 기간에 걸친 암 주사 속도의 변화율이고, 노즐 높이는 노즐과 기판 사이의 거리이다.
에칭 속도(즉, 기판 물질이 화학적으로 제거되는 속도)를 제어하도록 조정될 수 있는 파라미터들은, 기판의 스핀 속도, 화학 에칭액의 농도, 화학 에칭액의 온도, 체류 시간을 포함하지만, 이러한 예들로 한정되지는 않는다. 스핀 속도는, 화학 에칭액이 기판 표면 상에 증착되고 있는 동안 척(420)과 척 상의 기판이 회전하는 속도이다. 도 9d는, 스핀 속도와 화학 에칭액의 온도의 함수인 실리콘 에칭 속도의 예시적인 그래프이며, 에칭 속도와 온도와 스펀 속도 간의 관계를 예시한다.
화학 에칭액 농도는, 기판의 상부면을 화학적으로 제거하는 데 사용되는 화학 에칭액의 농도이다. KOH(수산화칼륨)는, 예시적인 하나의 에칭액이다. KOH(수산화칼륨)는, (구리 등의) 전도체와 (실리콘 산화물 등의) 절연체에 대하여 실리콘을 선택적으로 에칭하는 특성 때문에 실리콘 TSV 기판을 에칭하는 데 통상적으로 사용되는 하나의 예시적인 에칭액이다. 도 9e는 실리콘 에칭 속도에 대한 KOH 농도의 관계를 나타내는 예시적인 그래프를 도시한다.
에칭 균일도(형성되는 기판의 방사상 두께의 균일도)를 제어하도록 조정될 수 있는 파라미터들은, 에칭되는 기판의 방사상 위치 상에 화학 에칭액을 증착하는 암의 체류 시간 및 기판의 스핀 속도를 포함하지만, 이러한 예들로 한정되지는 않는다.
체류 시간은, 노즐이 에칭액을 기판의 특정한 방사상 부분 상에 분배하는 시간의 양이다. 기판의 특정한 반경에서 체류 시간을 증가시키면 기판이 그 반경에서 더욱 에칭된다. 체류 시간은, 암 주사 속도, 가속, 및 척의 스핀 속도 등의 전술한 공정 파라미터들을 조정함으로써 제어될 수 있다. 더욱 구체적으로, 에칭 공정 동안 척 상에서 회전하고 있는 기판의 원형 형상으로 인해, 기판의 에지보다 기판의 중심을 에칭하는 데 필요한 화학 에칭액을 증착하기 위한 시간이 덜 필요하고, 이처럼, 암의 속도, 기판에 걸친 하나의 방사상 위치와 다른 하나의 방사상 위치 간의 가속/감속을 조정하여 특정한 위치에서 분배되는 에칭액의 양을 가변한다. 도 9f는 기판의 전체 표면에 걸쳐 균일한 체류 시간을 달성하도록 기판의 중심으로부터의 거리의 함수로서 암 주사 속도를 나타내는 예시적인 그래프이며, 균일한 체류 시간을 달성하는 데 사용될 수 있는 쌍곡선 모션 프로파일을 예시한다. 예시한 쌍곡선 모션 프로파일은, 통상의 기술자가 이해하듯이 기판의 특정한 위치에 걸쳐 체류 시간을 변경하도록 암 주사 속도와 가속의 변동에 대한 근거를 제공한다.
표면 조도를 제어하도록 조정될 수 있는 파라미터들은 화학 에칭액의 온도 및 기판 상의 화학 에칭액의 유속을 포함하지만, 이러한 예들로 한정되지는 않는다. 도 9g는, 실리콘 TSV 기판 에칭을 위한 온도와 유속의 함수로서 표면 조도를 나타내는 예시적인 그래프이며, 표면 조도와 유속과 온도의 비례 관계를 예시한다.
도 8을 참조해 보면, 특히 단계(830)를 참조해 보면, 바람직하게 에칭 레시피 모듈(778)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서는, 특정 기판의 표면 상의 다양한 방사상 위치에서의 오버버든을 선택적으로 에칭하여 원하는 에칭 깊이, 방사상 두께, 및 표면 조도를 달성하기 위한 에칭 레시피를 생성하게끔 에칭 위치, 표면 조도, 에칭 속도, 체류 시간, 표면 균일도를 제어하는 전술한 파라미터들 중 하나 이상을 정의하도록 공정 컨트롤러(705)를 구성할 수 있다. 파라미터들은 에칭 위치 또는 기타 변수들의 함수로서 정의될 수 있으며, 따라서 에칭 공정의 전 과정에 걸쳐 가변적이라는 점을 이해하기 바란다. 예를 들어, 방사상 두께를 갖는, 예를 들어, 에지가 두꺼운 기판에 있어서, 체류 시간은 기판의 에지 근처에서 증가될 수 있고, 스핀 속도는 에지에서 더욱 큰 에칭 깊이를 달성하도록 감소될 수 있다.
또한, 에칭 레시피는 에칭 지속 시간을 포함할 수 있다. 에칭 지속 시간은, 특정 기판에 대하여 에칭 공정이 수행되는 시간의 양이며, 에칭 공정 동안 제거되는 물질의 양을 제어하도록 가변될 수 있다. 소정의 에칭 레시피가 기판에 대하여 더욱 오랫동안 수행될수록, 더 많은 기판이 제거되고, 이와 같이, 전체 두께가 감소된다.
이어서, 단계(840)에서, 바람직하게 에칭 레시피 모듈(778)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 에칭 장치(400)가 에칭 레시피에 따라 기판을 에칭하도록 공정 컨트롤러(705)를 구성할 수 있다.
이어서, 단계(850)에서, 바람직하게 세정 모듈(770)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 기판 세정 장치(1600)가 기판을 세정하여 잔여 에칭액과 기타 입자들을 기판의 표면으로부터 제거하도록 공정 컨트롤러(705)를 구성할 수 있다. 세정 공정은, 하나 이상의 브러시(1630)를 사용하는 브러시 스크러빙과 노즐(1650)로부터의 세정액 증착을 포함할 수 있다. 또한, 공정 컨트롤러는, 기판 세정 장치(1700)가 하나 이상의 노즐(1750)을 사용하여 세정액의 고속 스프레이를 특정 기판 상으로 분배하고 및/또는 메가소닉 세정 장치(1775)를 사용하여 작은 입자들을 기판 표면으로부터 제거하도록 최종 세정 공정을 수행하게 할 수 있다. 또한, 이러한 최종 세정 단계는, 건조 장치(1780)가 최종 세정 공정의 종료시 웨이퍼를 건조시키는 것을 포함할 수 있다.
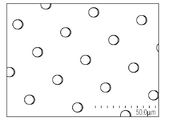
예를 들어, 실리콘 TSV 시판의 OH 에칭 후에, 잔여 칼륨계 입자들과 칼륨 이온들은 기판의 표면 상에 남게 되며, 기판 표면의 전기적 특성을 변화시키며, 제거되지 않으면 수율이 손실된다. 이에 따라, 기판은 잔여 입자들, 이온들 및 에칭액의 양을 최소화하도록 세정된다. 도 9h는 세정 단계 전에 잔여 입자들과 이온들이 있는 TSV들이 표출된 예시적인 기판의 주사 전자 현미경 화상을 도시한다. 도 9i는 잔여 입자들과 이온들이 없는 TSV들이 표출된 예시적인 기판의 주사 전자 현미경 화상을 도시한다.
단계(860)에서, 바람직하게 촬상 모듈(770)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 단계(810)에 관하여 전술한 바와 같이 촬상 장치(600)가 특정 기판의 두께를 측정하게 하고 두께 정보를 공정 컨트롤러(705)에 송신하도록 공정 컨트롤러(705)를 구성할 수 있다.
이어서, 다시 단계(820)로 복귀하여, 바람직하게 에칭 레시피 모듈(774)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 개시된 실시예들에 따라 단계(860)에서 얻은 두께 정보를 분석하여 에칭 공정을 거칠 후속 기판들에 대한 에칭 프로파일 및/또는 에칭 레시피를 조정하도록 공정 컨트롤러(705)를 구성할 수 있다. 더욱 구체적으로, 공정 컨트롤러는, 후 처리 두께 정보를 전 처리 두께 정보와 비교하여, 에칭 장치(400)에 의해 실행된 에칭 레시피가 원하는 에칭 속도와 원하는 위치에서 기판의 원하는 양을 성공적으로 에칭하였는지 그리고 이에 따라 처리된 기판이 표면 균일도를 포함한 원하는 물리적 특징을 갖는지 여부를 결정할 수 있다. 또한, 전술한 바와 같이 비아들의 실제 높이에 관한 정보를 이용하여 기준 비아 높이를 조정할 수 있다. 단계(830)에 관하여 전술한 바와 같이, 에칭 속도와 두께 정보에 따라, 공정 컨트롤러는, 통상의 기술자가 이해하듯이, 후속 기판들에 대한 에칭 레시피를 조정할 수 있고, 또는 화학 에칭액의 농도를 복구하고 화학 에칭액 온도를 조정하는 등 일관된 에칭 환경을 유지하도록 파라미터들을 조정할 수 있다.
이에 따라, 공정 흐름(800)을 실행하는 시스템(100)은, 이전에 에칭된 기판에 기초하여 및 에칭되는 각 기판에 특정하게 맞춤화되는 에칭 레시피를 실시간으로 생성하도록 특정화된 계측을 이용하고 단일 웨이퍼 습식 에칭 장치를 이용하여 기판들을 에칭하는 완전 자동화 생산급 해결책을 제공한다. 그 결과, 시스템은, 정밀한 에칭 깊이, 표면 균일도를 달성할 수 있고, 일반적으로, 더욱 높은 품질의 기판을 생산할 수 있고, 소모를 최소화할 수 있고, 단일 웨이퍼 습식 에칭 공정에 연관된 이점들을 실현할 수 있다.
전술한 바와 같이, 측정 단계와 에칭 단계는 모두 단일 하우징 내에 위치하는 상보적 장치들에 의해 정의된 집적 시스템의 일부로서 수행된다.
본 발명의 또 다른 중요 양태에 따르면, 단계(840)에 관하여 전술한 에칭 공정은, TSV들이 노출되는 지점을 더욱 정밀하게 결정하고 에칭 공정의 길이(지속시간)와 TSV들의 노출 높이를 더욱 정밀하게 제어하는 데 사용되는 종점 검출 장치(500)를 포함할 수 있다. 전술한 바와 같이, 에칭 장치(400)는, 바람직하게 광 방출기(510)와 전하 결합 소자(CCD) 광 검출기(또는 다른 유형의 검출기)(520)를 포함하는 인시츄 공정 감시 시스템인 종점 검출 장치(500)를 포함할 수 있다. 바람직하게 고 강도 광 방출기인 방출기는, 에칭 공정이 진행되는 에칭 챔버(410) 내에 있는 동안 기판의 적어도 일부 상에 광을 방출하고, CCD는 기판으로부터 반사되는 광을 검출한다. 일반적으로, 기판 표면으로부터 반사되어 CCD에 의해 수광되는 광의 성질, 즉, 광 시그너처(light signature)는 표면의 조성물에 따라 가변된다. 이에 따라, 오버버든을 갖는 기판 표면에 의해 반사되는 광은, TSV들이 표출된 기판에 의해 반사되는 광과는 다른 특성들, 즉 광 시그너처를 갖게 된다. 공정 감시 시스템(예를 들어, 공정 컨트롤러(705) 등)은, TSV들이 표출된 기판에 대하여 광 시그너처가 기준 시그너처에 비교되는 지점을 식별하도록, 검출된 광 시그너처를 감시한다. 다시 말하면, 검출된 광 시그너처를 분석하여, TSV들이 표출된 기판을 나타내는 검출된 광 시그너처를 기판이 언제 갖는지를 결정하고, 이에 따라 에칭 공정이 완료, 또는 거의 완료되었으며, 표출된 TSV들이 존재함을 나타낸다.
이제 도 10을 참조해 보면, 흐름도는, 본 명세서에서 개시하는 적어도 일 실시예에 따라 습식 에칭 공정 단계(840) 동안 TSV들이 표출되는 지점을 검출하기 위한 루틴(1000)을 예시한다. 본 명세서에서 설명하고 도면에 도시한 것보다 적거나 많은 동작을 수행할 수 있다는 점을 파악해야 한다. 이러한 동작들은, 또한, 본 명세서에서 설명하는 순서와는 다른 순서로 수행될 수 있다.
공정은, 바람직하게 종점 검출 모듈(772)을 포함하는 소프트웨어 모듈들(730) 중 하나 이상을 실행하는 프로세서(710)가 광 방출기(510)로 하여금 특정 기판의 표면의 적어도 일부(샘플 영역) 상에 광을 방출하게 하고 광 검출기(520)로 하여금 특정 기판의 그 일부에 의해 반사되는 광의 색을 검출하게 하도록 공정 컨트롤러(705)를 구성하는 단계(1005)에서 시작된다. 바람직하게, 광 검출기는 CCD 검출기이지만, 다른 대체 광 검출기를 사용할 수도 있다. 검출기는, 본 명세서에서 더 설명하는 바와 같이, 검출된 반사 광 정보를 공정 컨트롤러에 송신한다. 기판을 에칭하여 TSV들을 표출하는 경우, 주변 광에서 공정의 종료시 짧고 얇은 노출된 TSV들에 의해 불충분한 광이 반사된다. 개시된 실시예들의 중요 양태들에 따르면, 고 강도 LED 및/또는 착색 고 강도 광이 기판으로 향하여 기판에 의해 반사되는 광 시그너처를 향상시킨다. 광 시그너처는, 공정 컨트롤러에 의해 검출 및 감시되는 광의 하나 이상의 특정 파장의 강도를 포함한다. 예를 들어, 실리콘 웨이퍼의 TSV들의 표출점을 검출하는 경우, 광 시그너처는 광의 삼 파장(청색, 적색, 및 녹색)을 포함할 수 있다. 방출기 및/또는 검출기는, 방출되는 및/또는 검출되는 광의 특징을 조정하도록 적색 필터 등의 하나 이상의 광 필터를 포함할 수 있다. 종점 검출 장치에 의해 감시되고 있는 특정 기판의 샘플 영역은, 표면 상의 하나 이상의 지점일 수 있고, 공정 컨트롤러에 의해 디폴트로 또는 사용자에 의해 정의될 수 있다. 복수의 지점 각각은 CCD 검출기의 하나 이상의 화소에 대응할 수 있고, 검출된 반사 광은, 기판 상의 유체 층으로부터의 잡음과 왜곡으로 인한 변동을 감소시키도록 평균화될 수 있다. 평균화된 강도 정보는, 공정 컨트롤러에 의해 기록될 수 있고, 또한, 차트 상에 플롯팅되고 디스플레이 상에 표시될 수 있다.
이어서, 단계(1010)에서, 바람직하게 종점 검출 모듈(772)을 포함하는 소프트웨어 모듈들(730) 중 하나 이상을 실행하는 프로세서(710)는, CCD 검출기에 의해 검출된 광 정보를 분석하여 CCD에 의한 검출시 에칭되고 있는 특정 기판의 광 시그너처를 기준 광 시그너처와 비교하도록 공정 컨트롤러(705)를 구성한다.
특정 기판 및/또는 후속 기판을 에칭하기 전의 어느 순간에, 바람직하게 종점 검출 모듈을 포함하는 하나 이상의 소프트웨어 모듈을 실행하는 프로세서는, 설정된 지속시간 동안 기준 기판을 에칭하고 에칭 공정 동안 특정한 간격으로 CCD에 의해 수집되는 정보의 프레임들을 분석함으로써 광 강도를 결정하고 각 프레임에서의 광의 삼 파장(청색, 적색, 녹색)의 강도를 산출하고 TSV들이 표출될 것으로 알려진 경우 광의 삼 파장의 강도를 주목하도록 공정 컨트롤러를 구성할 수 있다는 점을 이해하기 바란다. 공정 컨트롤러는, 또한, 시간 경과에 따른 기준 기판에 대한 광 강도 데이터를 플롯팅할 수 있고 그 플롯을 기술자에게 표시할 수 있다. 광 시그너처의 변화는, 통상의 기술자가 이해하듯이, 후속 기판들이 마찬가지의 물성(예를 들어, 기판 조성 및 크기 및 TSV 조성 및 크기)을 갖는다면, 이어지는 후속 기판들에 대하여 마찬가지이다. 또한, 광 시그너처의 특정한 변화율은 특정한 에칭 레시피에 따라 가변될 수 있음을 이해하기 바란다.
특정 기판과 후속 기판들을 에칭하는 동안 종점을 결정하는 것에 관하여, 공정 컨트롤러는, 에칭 공정 동안 특정 간격으로 CC에 의해 수집되는 반사 광 강도 정보의 프레임들을 분석함으로써 언제 표출점에 도달하는지를 검출할 수 있고, 각 프레임에서의 광의 삼 파장(청색, 적색, 녹색)의 강도를 산출할 수 있고, 광 강도 정보를 기준 기판으로부터 얻은 기준 광 강도와 비교할 수 있다. 특정 기판의 광 강도 정보가 기준 광 강도 정보에 대응하는 경우, 공정 컨트롤러는 에칭 공정을 종료할 수 있거나 오버에칭 스테이지를 시작할 수 있다.
기준 기판에 대한 광 강도 데이터, 에칭 속도, 및 초기 및 최종 두께 정보에 기초하여, 시스템은, 후속 기판에 대한 (공정 흐름(800)에 관하여 전술한 바와 같이) 에칭 레시피 및 최소 지속시간, 최대 지속시간, TSV들이 표출되는 지점에서의 광 강도, 및 에칭 공정의 종점 설정을 포함한 기타 파라미터들을 조정할 수 있지만, 이러한 파라미터들의 예로 한정되지는 않는다. 종점은, TSV들을 원하는 높이로 표출하도록 공정 시간의 퍼센트 또는 초 단위의 오버에칭 지속시간(예를 들어, 표출점이 검출된 후 에칭 공정이 얼마나 오랫동안 지속되어야 하는지)으로서 정의될 수 있다.
예를 들어, 기준 기판이 운영되는 경우, 에칭 속도는 2㎛/분으로 확인되며 광 강도는 TSV들이 처음으로 표출되는 경우 제1값으로 검출된다. 후속 기판에 대한 평균 에칭 깊이가 예를 들어 10㎛이고(이렇게 간략화된 예는, 전술한 바와 같이 방사상 두께 변동이 존재할 수 있으므로, 평균 에칭 깊이 면에서 설명함) 원하는 TSV 표출 높이가 2㎛라고 가정하면, 시스템은, 기준 에칭 속도와 에칭 깊이에 기초하여 후속 운영을 위한 에칭 시간이 약 5분이어야 함을 결정할 수 있다. 후속 기판을 에칭하는 경우, 일단 CCD가 제1값을 갖는 광 강도(목표 광 강도)를 검출하면, 표출점이 검출되며, 종점은 2㎛인 표출된 TSV 높이를 달성하게끔 오버에칭 시간 1분을 갖도록 설정된다.
도 11은 개시한 실시예에 따라 TSV 표출 공정의 지속시간에 대한 광 강도 데이터의 예시적인 그래프를 도시한다. 그래프는, 이전에 에칭된 기준 기판에 대한 광의 적색(1110), 청색(1112), 녹색(1114) 파장에 대한 광 강도 데이터를 나타낸다. 강도 데이터는 에칭 공정의 지속시간 동안 플롯팅된다. 이 예에서, 그래프는, 약 t=530에서 기준 웨이퍼의 표출점(1132) 및 약 t=721에서 종점(1130)의 광 강도를 나타낸다. 이 종점은 비아의 일부를 노출시키기 위한 시간을 포함한다. 그래프는, 또한, 기준 웨이퍼로부터 수집된 광 강도 데이터에 따라 종점 검출을 이용하여 에칭된 특정 기판에 대한 광의 적색(1120), 청색(1122), 녹색(1124) 파장에 대한 광 강도 데이터의 플롯을 도시한다. 그래프는, 이 특정한 예시적인 운영에 있어서, 특정 기판의 표출점(1140)(특정 기판의 광 시그너처가 기준 표출점(1132)의 시그너처와 일치하는 지점)이 t=457에서 발생하였음을 나타낸다. 또한, 표출점(1140)과 에칭 속도와 원하는 오버에칭에 기초하여, 특정 기판에 대한 실제 종점은 t=650에서 발생하였다.
이에 따라, TSV들이 표출되는 지점을 검출하기 위한 루틴(1000)을 구현하며 종점 검출 장치(500)를 포함하는 단일 웨이퍼 습식 에칭 장치(400)를 포함하는 시스템(100)은, 이전에 에칭된 웨이퍼에 관한 피드백에 따라 TSV 표출 높이를 정밀하게 제어하고 에칭 레시피 파라미터들을 실시간으로 조정하는 자동화 해결책을 제공한다. 이에 따라, 시스템은, 더욱 높은 품질의 처리된 기판을 갖게 하고, 소모를 최소화하며, 단일 웨이퍼 습식 에칭 공정에 일반적으로 연관된 이점들을 실현한다. 종점 검출을 포함한 습식 에칭 단계를 공정 흐름(800)에 관하여 설명하였지만, 종점 검출을 이용한 단일 웨이퍼 습식 에칭을 공정 흐름(800)의 나머지 단계들 중 하나 이상 없이 수행할 수 있다는 점을 이해하기 바란다.
도 8에 관하여 설명한 각 공정 단계 사이에서, 소프트웨어 모듈들(730) 중 하나 이상을 실행하는 프로세서(710)가 웨이퍼 이송 장치(300)로 하여금 특정 웨이퍼를 공정 단계들을 수행하는 다양한 스테이션들 간에 이동시키도록 공정 컨트롤러(705)를 구성한다는 점을 이해하기 바란다.
바람직하게, 공정 흐름(800) 및/또는 루틴(1000)의 실행 전체에 걸쳐, 다양한 정보와 데이터는, 공정 컨트롤러(705), 제1 스테이션(200), 제2 스테이션(210), 제3 스테이션(220), 제4 스테이션(230), 제5 스테이션(240), 및 웨이퍼 이송 장치(300), FOUP 로드포트(160), 촬상 장치(600), 에칭 컨트롤러(401), 종점 검출 장치(500), 세척 컨트롤러(1601)를 포함하는 컴퓨터 제어형 장치나 이에 연관된 컨트롤러를 포함하는 시스템(100)의 구성요소들에 의해 수집되지만, 이러한 예들로 한정되지는 않는다. 데이터베이스 모듈(780)과 디스플레이 모듈(780)을 포함하는 하나 이상의 소프트웨어 모듈(730)을 실행하는 프로세서(710)는, 시스템(100)의 다양한 구성요소들로부터의 데이터의 적어도 일부를 수집하고 수집한 데이터를 저장 장치(790) 및/또는 메모리(720)에 저장하도록 공정 컨트롤러(705)를 구성할 수 있다. 게다가, 공정 컨트롤러는, 통상의 기술자라면 이해하듯이, 데이터를 원시 형태로 또는 그래픽 표현 등의 된 형태로 디스플레이(740) 상에 표시할 수 있다.
이 시점에서, 전술한 설명의 상당 부분은 TSV들을 표출하도록 습식 에칭 기판에 대하여 습식 에칭 공정을 수행하기 위한 시스템 및 방법에 관한 것이었지만, 본 명세서에서 개시하는 시스템과 방법은, 참조한 시나리오를 훨씬 벗어나는 시나리오, 상황, 설정에 마찬가지로 이용 및/또는 구현될 수 있다는 점에 주목하기 바란다. 습식 에칭 공정을 수행하기 위한 시스템은 단일 웨이퍼 습식 에칭 스테이션에서 기판이 원하는 표면 균일도와 두께로 에칭되는 사실상 임의의 시나리오에서 효과적으로 채택될 수 있음을 쉽게 파악할 수 있다.
도면의 유사한 번호들은 여러 도면에 걸쳐 유사한 요소들을 나타내고, 도면을 참조하여 설명 및 예시하는 모든 구성요소들 및/또는 단계들이 모든 실시예나 구성에 요구되는 것은 아니라는 점을 이해하기 바란다.
따라서, 본 시스템과 방법의 예시적인 실시예와 구성은, 습식 에칭 기판을 위한, 시스템, 공정, 및 컴퓨터 구현 제어 방법, 컴퓨터 시스템, 및 컴퓨터 프로그램 제품을 제공한다. 도면의 흐름도와 블록도는, 다양한 실시예와 구성에 따른 시스템, 방법, 및 컴퓨터 프로그램 제품의 가능한 구현예들의 아키텍처, 기능, 및 동작을 예시한다. 이러한 점에서, 흐름도 또는 블록도의 각 블록은, 컴퓨터 구현 방법에 관한 것인 경우, 특정한 논리 함수(들)를 구현하기 위한 하나 이상의 실행가능 명령어를 포함하는, 모듈, 세그먼트, 또는 코드의 일부를 나타낼 수 있다.
또한, 일부 대체 구현예들에서는, 블록에서 언급되는 기능이 도면에 표시된 순서와는 다르게 발생할 수도 있다는 점을 주목하기 바란다. 예를 들어, 연속적으로 도시한 두 개의 블록은, 사실상, 실질적으로 동시에 실행될 수 있고, 또는 관련된 기능에 따라 그 블록들은 때때로 역 순서로 실행될 수 있다. 또한, 블록도 및/또는 흐름도의 각 블록, 및 블록도 및/또는 흐름도의 블록들의 조합이, 특정한 기능이나 액트, 또는 전용 하드웨어 및 컴퓨터 명령어들의 조합을 수행하는 전용 하드웨어 기반 시스템에 의해 구현될 수 있다는 점에 주목한다.
본 명세서에서 사용하는 용어는, 구체적인 실시예들을 설명하기 위한 것일 뿐이며 본 발명을 한정하려는 것이 아니다. 본 명세서에서 사용하는 바와 같이, "한", "하나", "그" 등의 단수 형태는, 명확하게 달리 언급하지 않는 한, 복수의 형태도 포함하려는 것이다. 또한, "포함한다"(comprises) 및/또는 "포함하는"(comprising)이라는 용어들은, 본 명세서에서 사용시, 언급된 특징부들, 정수들, 단계들, 동작들, 요소들, 및/또는 구성요소들의 존재를 특정하지만 하나 이상의 다른 특징부들, 정수들, 단계들, 동작들, 요소들, 구성요소들, 및/또는 이들의 그룹들의 존재나 추가를 배제하지 않는다는 점을 이해할 것이다.
또한, 본 명세서에서 사용하는 표현과 용어는 설명을 위한 것이며 한정적인 것으로서 간주해서는 안 된다. "포함하는"(including), "포함하는"(comprising), 또는 "구비하는"(having), "포함하는"(containing), "수반하는"(involving) 및 이들의 변형을 사용하는 것은, 그 뒤에 열거되는 항목들과 균등물 및 추가 항목들을 포함하려는 것이다.
전술한 내용은 예시로서 제공된 것일 뿐이며 한정적인 것으로서 해석해서는 안 된다. 예시하고 설명한 실시예들과 적용예들을 따르지 않고서 그리고 다음의 청구범위에서 설명하고 있는 본 발명의 진정한 사상과 범위로부터 벗어나지 않고서 본 명세서에서 설명한 내용에 대하여 다양한 수정과 변경을 행할 수 있다.
Claims (43)
- 원하는 최종 에칭 프로파일을 갖는 기판을 제조하도록 복수의 스테이션을 포함하는 단일 웨이퍼 습식 에칭 처리 시스템을 이용하여 기판을 습식 에칭하는 방법으로서,
측정 스테이션에서, 특정 기판에 대한 초기 두께 정보를 측정하는 단계;
상기 초기 두께 정보와 상기 원하는 최종 에칭 프로파일에 따라 상기 특정 기판에 대한 에칭 프로파일을 산출하는 단계;
산출된 상기 에칭 프로파일에 따라 상기 특정 기판에 대한 에칭 레시피(etch recipe)를 생성하는 단계; 및
상기 원하는 최종 에칭 프로파일을 달성하도록 상기 에칭 레시피에 따라 상기 특정 기판을 에칭하는 단계를 포함하되,
상기 복수의 스테이션은, 하우징 내에 배치되고, 상기 기판을 스테이션들 간에 제어가능하게 이동시키도록 구성된 자동화 기판 이송 장치(automated substrate transfer device)에 의해 액세스됨으로써, 상기 기판이 에칭 처리될 때 상기 기판이 실시간으로 측정될 수 있는, 습식 에칭 방법. - 제1항에 있어서, 상기 측정 스테이션에서 상기 특정 기판에 대한 최종 두께 정보를 측정하는 단계를 더 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 초기 두께 정보를 측정하는 단계는, 상기 특정 기판의 표면 상의 하나 이상의 위치를 광학 주사하고 상기 하나 이상의 위치에 대하여 검출된 두께를 상기 초기 두께 정보로서 기록하는 단계를 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 초기 두께 정보는 상기 기판의 표면 상의 하나 이상의 방사상 위치에서의 상기 기판의 두께를 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 특정 기판에 대한 에칭 프로파일을 산출하는 단계는, 상기 특정 기판에 대한 방사상 두께를 산출하고 상기 방사상 두께와 상기 원하는 최종 에칭 프로파일의 함수인 알고리즘에 따라 에칭 깊이를 산출하는 단계를 더 포함하는, 습식 에칭 방법.
- 제5항에 있어서, 상기 에칭 깊이는 상기 특정 기판 내의 하나 이상의 비아(via)의 기준 높이의 함수로서 또한 산출되는, 습식 에칭 방법.
- 제1항에 있어서, 상기 특정 기판에 대한 에칭 프로파일은, 이전 기판의 최종 두께 정보의 함수인 알고리즘에 따라 산출되는, 습식 에칭 방법.
- 제1항에 있어서, 상기 에칭 레시피를 생성하는 단계는, 상기 에칭 프로파일의 함수인 알고리즘에 따라 에칭 파라미터들을 조정하는 단계를 포함하는, 습식 에칭 방법.
- 제8항에 있어서, 상기 에칭 파라미터들은 에칭 스테이션에 위치하는 습식 에칭 장치에 의한 상기 에칭하는 단계 동안 상기 특정 기판의 에칭을 제어하고, 상기 에칭 파라미터들은, 화학 에칭액을 분배하는 노즐과 암(arm)의 위치, 척(chuck) 상에서의 상기 특정 기판의 스핀 속도, 암 주사 속도, 암 가속도, 상기 화학 에칭액의 농도, 상기 화학 에칭액의 온도, 체류 시간(dwell time), 상기 화학 에칭액의 유속, 및 에칭 지속 시간(duration)을 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 특정 기판을 에칭하는 단계는, 에칭 스테이션에 위치하는 단일 웨이퍼 습식 에칭 장치에 의해 상기 에칭 레시피에 따라 상기 기판의 표면 상으로 화학 에칭액을 분배하는 단계를 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 기판을 에칭한 후 상기 특정 기판에 대한 최종 두께 정보를 상기 측정 스테이션에서 실시간으로 측정하고, 측정된 상기 최종 두께 정보에 기초하여 상기 원하는 최종 에칭 프로파일이 달성되지 않은 경우, 상기 자동화 기판 이송 장치에 의해 상기 기판을 에칭 스테이션으로 다시 전달하는 단계를 더 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 특정 기판 상으로 세정액을 분배하여 상기 특정 기판을 스크러빙하는 것을 포함하여 상기 특정 기판을 세정하는 단계를 더 포함하는, 습식 에칭 방법.
- 제12항에 있어서, 상기 세정하는 단계는 세정액의 고속 스프레이를 상기 특정 기판 상으로 분배하는 단계를 포함하는, 습식 에칭 방법.
- 제12항에 있어서, 상기 세정하는 단계는 상기 특정 기판을 메가소닉(megasonically) 세정하는 단계를 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 상기 특정 기판을 에칭하는 단계는 종점 검출 장치를 사용하여 하나 이상의 TSV가 표출되는 종점을 검출하는 단계를 포함하는, 습식 에칭 방법.
- 제1항에 있어서, 에칭 속도는, 이전 기판으로부터의 에칭 속도의 함수인 알고리즘에 따라 산출되는, 습식 에칭 방법.
- 단일 웨이퍼 습식 에칭 처리 시스템을 이용하여 TSV들을 갖는 특정 기판이 에칭되는 에칭 공정의 종점을 검출하는 방법으로서,
(a) 상기 특정 기판의 표면의 적어도 샘플 영역 상에 광을 방출하는 단계;
(b) 상기 표면의 샘플 영역으로부터의 광 반사를 검출하는 단계;
(c) 상기 반사의 강도를 산출하는 단계;
(d) 상기 반사의 강도를, 상기 특정 기판의 표면 상에서 상기 TSV들이 표출되는 지점인 표출점을 나타내는 기준 강도와 비교하는 단계;
(e) 상기 강도가 상기 기준 강도에 대응하는 때를 검출함으로써 상기 에칭 공정의 표출점을 식별하는 단계; 및
(f) 식별된 상기 표출점을 고려하여 및 선택 사항인 사용자가 입력하는 오버에칭 지속시간을 고려하여 상기 에칭 공정의 종점을 설정하는 단계를 포함하는, 에칭 공정의 종점 검출 방법. - 제17항에 있어서, 상기 (a) 내지 (d) 단계는 상기 종점이 결정될 때까지 또는 최대 지속 시간 동안 반복되는, 에칭 공정의 종점 검출 방법.
- 제17항에 있어서, 상기 광은 착색(colored) 고 강도 광을 이용하여 방출되는, 에칭 공정의 종점 검출 방법.
- 제17항에 있어서, 상기 광은 고 강도 LED를 사용하여 방출되는, 에칭 공정의 종점 검출 방법.
- 제17항에 있어서, 상기 반사는 CCD 검출기를 사용하여 검출되는, 에칭 공정의 종점 검출 방법.
- 제17항에 있어서, 상기 반사의 강도를 검출하는 단계는 광의 삼 파장의 강도를 검출하는 단계를 포함하는, 에칭 공정의 종점 검출 방법.
- 제22항에 있어서, 상기 반사의 강도를 산출하는 단계는, 상기 광의 삼 파장의 각각에 대하여, 상기 샘플 영역 내의 복수의 지점에서 검출된 특정 파장의 강도를 평균화하는 단계를 포함하는, 에칭 공정의 종점 검출 방법.
- 제22항에 있어서, 상기 기준 강도는, TSV들이 표출될 때까지 단일 기판 습식 처리 시스템을 이용하여 지속 시간 동안 에칭 레시피에 따라 상기 TSV들을 갖는 기준 기판을 에칭함으로써 얻어지는, 에칭 공정의 종점 검출 방법.
- 제17항에 있어서, 상기 에칭 공정의 종점을 설정하는 단계는 오버에칭 지속시간을 설정하는 단계를 포함하고, 상기 오버에칭 지속시간은, 에칭 속도와 원하는 TSV 표출 높이의 함수인 알고리즘에 따라 산출되는, 에칭 공정의 종점 검출 방법.
- 제25항에 있어서, 상기 에칭 속도는 기준 기판에 대한 에칭 속도의 함수인 알고리즘에 따라 결정되는, 에칭 공정의 종점 검출 방법.
- 원하는 최종 에칭 프로파일을 갖는 기판을 제조하도록 하우징 내에 배치되고 자동화 기판 이송 장치에 의해 액세스가능한, 단일 웨이퍼 습식 에칭 장치와 촬상 장치를 포함하는 단일 웨이퍼 습식 에칭 처리 시스템에서의 기판의 습식 에칭 공정을 제어하기 위한 것이며, 상기 단일 웨이퍼 습식 에칭 장치와 상기 촬상 장치에 통신가능하게 결합되고 컴퓨터 판독가능 저장 매체와 상호작용하고 상기 저장 매체에 저장된 하나 이상의 소프트웨어 모듈을 실행하도록 구성된 하나 이상의 프로세서를 포함하는, 컴퓨터 구현 제어 시스템으로서,
상기 촬상 장치가 상기 기판에 대한 초기 두께 정보를 측정하게 하고 상기 찰상 장치로부터 상기 초기 두께 정보를 수신하도록 구성된 촬상 모듈;
상기 기판에 대한 방사상 두께를 실시간으로 산출하고 적어도 방사상 두께 정보 및 상기 원하는 최종 에칭 프로파일에 따라 상기 기판에 대한 에칭 깊이를 산출하도록 구성된 기판 두께 모듈; 및
상기 방사상 두께와 상기 에칭 깊이에 따라 상기 기판에 대한 에칭 레시피를 생성하고 상기 단일 웨이퍼 습식 에칭 장치가 상기 에칭 레시피에 따라 상기 기판을 에칭하게 하도록 구성된 에칭 레시피 모듈을 포함하고,
상기 촬상 모듈은, 또한, 상기 기판이 에칭 스테이션에 의해 에칭된 후, 상기 촬상 장치가 상기 기판에 대한 최종 두께 정보를 실시간으로 측정하게 하고 상기 촬상 장치로부터 상기 최종 두께 정보를 수신하도록 구성된, 컴퓨터 구현 제어 시스템. - 제27항에 있어서, 상기 에칭 레시피 모듈은, 또한, 이전 기판의 최종 두께 정보에 따라 상기 에칭 레시피를 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 제27항에 있어서, 상기 기판 두께 모듈은, 또한, 상기 방사상 두께와 상기 원하는 최종 에칭 프로파일의 함수인 알고리즘에 따라 상기 에칭 깊이를 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 제27항에 있어서, 상기 기판 두께 모듈은, 또한, 상기 기판 내의 하나 이상의 비아의 기준 높이의 함수로서 상기 에칭 깊이를 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 제27항에 있어서, 기판 세정 장치로 하여금 상기 기판을 세정하도록 구성된 세정 모듈을 더 포함하는, 컴퓨터 구현 제어 시스템.
- 단일 웨이퍼 습식 에칭 장치, 광 방출기, 및 광 검출기를 포함하는 단일 웨이퍼 습식 에칭 스테이션에 의해 TSV들을 갖는 기판의 습식 에칭 공정의 종점을 결정하고, 상기 단일 웨이퍼 습식 에칭 장치, 상기 광 방출기, 및 상기 광 검출기에 통신가능하게 결합되고, 컴퓨터 판독가능 저장 매체와 상호 작용하고 상기 저장 매체에 저장된 하나 이상의 소프트웨어 모듈을 실행하도록 구성된 하나 이상의 프로세서를 포함하는, 컴퓨터 구현 제어 시스템으로서,
종점 검출 모듈을 포함하고, 상기 종점 검출 모듈은,
(a) 상기 광 방출기가 상기 기판의 표면의 적어도 샘플 영역 상에 광을 방출하게 하고,
(b) 상기 광 검출기가 상기 표면의 샘플 영역으로부터의 광 반사를 검출하게 하고,
(c) 상기 반사의 강도를 산출하고, 상기 반사의 강도를, 상기 TSV들이 상기 기판의 표면 상에 표출되는 지점인 표출점을 나타내는 기준 강도와 비교하고, 그리고
(d) 상기 강도가 상기 기준 강도에 대응하는 때를 결정하고 식별된 상기 표출점을 고려하여 및 선택 사항으로 사용자가 입력하는 오버에칭 지속시간을 고려하여 상기 에칭 공정의 종점을 설정하도록 구성된, 컴퓨터 구현 제어 시스템. - 제32항에 있어서, 상기 광 방출기는 고 강도 LED인, 컴퓨터 구현 제어 시스템.
- 제32항에 있어서, 상기 광 방출기는 CCD 검출기인, 컴퓨터 구현 제어 시스템.
- 제32항에 있어서, 상기 종점 검출 모듈은 상기 광 검출기에 의해 검출되는 광의 삼 파장의 반사 강도를 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 제35항에 있어서, 상기 종점 검출 모듈은, 상기 삼 파장의 각각에 대하여, 상기 샘플 영역 내의 복수의 지점에서 검출되는 특정 파장의 강도를 평균화하는 알고리즘에 따라 상기 광의 삼 파장의 강도를 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 제32항에 있어서, 상기 종점 검출 모듈은, 에칭 속도와 원하는 TSV 표출 높이의 함수인 알고리즘에 따라 상기 오버에칭 지속시간을 산출하도록 구성된, 컴퓨터 구현 제어 시스템.
- 기판에 대하여 습식 에칭 공정을 수행하기 위한 시스템으로서,
내부 공간을 정의하는 벽들을 포함하는 하우징;
상기 하우징의 내부 공간 내에 배치되고, 상기 기판에 대한 초기 두께 정보와 최종 두께 정보 모두를 실시간으로 측정하도록 구성된 촬상 장치를 포함하는 측정 스테이션;
상기 하우징의 내부 공간 내에 배치되고, 단일 웨이퍼 습식 에칭 장치를 포함하는 에칭 스테이션;
상기 하우징의 내부 공간 내에 배치되고, 상기 기판이 상기 습식 에칭 공정을 거칠 때 상기 측정 스테이션에서 측정이 실시간으로 수행되게끔 상기 측정 스테이션과 단일 웨이퍼 습식 에칭 스테이션 간에 상기 기판을 제어가능하게 이동시키도록 구성된 자동화 기판 이송 장치; 및
상기 에칭 스테이션, 상기 측정 스테이션, 및 상기 기판 이송 장치에 통신가능하게 결합된 컴퓨터 구현 제어 시스템을 포함하되,
상기 제어 시스템은, (1) 촬상 장치가 상기 기판의 초기 두께 정보를 측정하게 하고, (2) 상기 촬상 장치로부터 상기 초기 두께 정보를 수신하고, (3) 상기 기판에 대한 에칭 레시피를 실시간으로 산출하고, (4) 상기 단일 웨이퍼 습식 에칭 장치가 상기 에칭 레시피에 따라 상기 기판을 에칭하게 하고, (5) 상기 기판이 에칭된 후, 상기 촬상 장치가 상기 최종 두께 정보를 측정하게 하고, 그리고 (6) 상기 촬상 장치로부터 상기 최종 두께 정보를 수집함으로써, 상기 습식 에칭 공정을 제어하도록 구성된, 습식 에칭 공정 수행 시스템. - 제38항에 있어서, 상기 제어 시스템은, 상기 단일 웨이퍼 습식 에칭 장치를 사용하여 상기 초기 두께 정보, 목표 에칭 프로파일, 및 에칭된 이전 기판으로부터의 최종 두께 정보의 함수로서 상기 기판에 대한 에칭 레시피를 실시간으로 산출하도록 구성된, 습식 에칭 공정 수행 시스템.
- 제38항에 있어서, 상기 에칭 스테이션은 상기 습식 에칭 공정의 종점을 검출하도록 구성된 종점 검출 장치를 포함하는, 습식 에칭 공정 수행 시스템.
- 제39항에 있어서, 상기 종점 검출 장치는 고 강도 광 방출기와 광 검출기를 포함하는, 습식 에칭 공정 수행 시스템.
- 제40항에 있어서, 상기 기판은 TSV들을 갖는 기판을 포함하고, 상기 제어 시스템은 상기 TSV들을 갖는 기판에 대한 표출점을 검출하도록 구성된, 습식 에칭 공정 수행 시스템.
- 제42항에 있어서, 상기 종점 검출 장치는, (1) 상기 기판의 표면의 적어도 샘플 영역 상으로 광을 방출하고, (2) 상기 표면의 샘플 영역으로부터의 광 반사를 검출하고, (3) 상기 반사의 강도를 산출하고, (4) 상기 반사의 강도를, 상기 TSV들이 특정 기판의 표면 상에 표출되는 지점인 표출점을 나타내는 기준 강도와 비교하고, (5) 상기 강도가 상기 기준 강도에 대응하는 때를 검출하고 이에 따라 상기 에칭 공정의 표출점을 식별하고, 그리고 (6) 식별된 상기 표출점을 고려하여 및 선택 사항으로 사용자가 입력하는 오버에칭 지속시간을 고려하여 상기 습식 에칭 공정의 종점을 설정하도록 구성된, 습식 에칭 공정 수행 시스템.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/780,657 | 2013-02-28 | ||
| US13/780,657 US9698062B2 (en) | 2013-02-28 | 2013-02-28 | System and method for performing a wet etching process |
| PCT/US2014/016479 WO2014133792A1 (en) | 2013-02-28 | 2014-02-14 | A system and method for performing a wet etching process |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20150122661A true KR20150122661A (ko) | 2015-11-02 |
Family
ID=51388548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020157023130A KR20150122661A (ko) | 2013-02-28 | 2014-02-14 | 습식 에칭 공정을 수행하기 위한 시스템 및 방법 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US9698062B2 (ko) |
| JP (2) | JP2016515300A (ko) |
| KR (1) | KR20150122661A (ko) |
| CN (1) | CN105209402B (ko) |
| SG (1) | SG11201506667WA (ko) |
| TW (1) | TWI613719B (ko) |
| WO (1) | WO2014133792A1 (ko) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180067408A (ko) * | 2016-12-12 | 2018-06-20 | 미쓰비시덴키 가부시키가이샤 | 반도체 장치의 제조 방법 |
| KR20180133939A (ko) * | 2016-05-06 | 2018-12-17 | 어플라이드 머티어리얼스, 인코포레이티드 | 에칭 시스템을 위한 웨이퍼 프로파일링 |
| KR20200053399A (ko) | 2018-11-08 | 2020-05-18 | 한양대학교 산학협력단 | 2단자 사이리스터 메모리 소자의 제조방법 |
| KR20200130642A (ko) * | 2019-05-09 | 2020-11-19 | 사이언테크 코포레이션 | 기판을 처리하기 위한 장치 및 상기 장치를 이용한 기판을 식각하는 절차를 제어하기 위한 방법 |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9079210B2 (en) * | 2013-07-22 | 2015-07-14 | Infineon Technologies Ag | Methods for etching a workpiece, an apparatus configured to etch a workpiece, and a non-transitory computer readable medium |
| US10504758B2 (en) * | 2014-02-14 | 2019-12-10 | Taiwan Semiconductor Manufacturing Company Ltd. | Nozzle having real time inspection functions |
| KR20160045299A (ko) * | 2014-10-17 | 2016-04-27 | 도쿄엘렉트론가부시키가이샤 | 기판 처리 장치, 연계 처리 시스템 및 기판 처리 방법 |
| US10026660B2 (en) * | 2014-10-31 | 2018-07-17 | Veeco Precision Surface Processing Llc | Method of etching the back of a wafer to expose TSVs |
| AT518466A3 (de) * | 2014-10-31 | 2019-07-15 | Veeco Precision Surface Proc Llc | System und Verfahren zum Ausführen eines Nass-Ätzprozesses |
| US9870928B2 (en) * | 2014-10-31 | 2018-01-16 | Veeco Precision Surface Processing Llc | System and method for updating an arm scan profile through a graphical user interface |
| KR20160101760A (ko) * | 2015-02-17 | 2016-08-26 | 주식회사 엠엠테크 | 글라스 박형화 장치 |
| US20170221783A1 (en) * | 2016-01-28 | 2017-08-03 | Leonard TEDESCHI | Self-aware production wafers |
| US10443943B2 (en) | 2016-03-29 | 2019-10-15 | Veeco Precision Surface Processing Llc | Apparatus and method to control properties of fluid discharge via refrigerative exhaust |
| TWI738757B (zh) * | 2016-04-05 | 2021-09-11 | 美商維克儀器公司 | 經由化學的適應性峰化來控制蝕刻速率的裝置和方法 |
| US10250258B2 (en) * | 2016-09-28 | 2019-04-02 | Nxp B.V. | Device and method for detecting semiconductor substrate thickness |
| US10541180B2 (en) | 2017-03-03 | 2020-01-21 | Veeco Precision Surface Processing Llc | Apparatus and method for wafer thinning in advanced packaging applications |
| KR101977386B1 (ko) * | 2017-06-30 | 2019-05-13 | 무진전자 주식회사 | 웨이퍼 식각 장치 및 이를 사용하는 방법 |
| CN107369638B (zh) * | 2017-07-12 | 2020-11-27 | 上海华力微电子有限公司 | 刻蚀管控系统及其管控方法和刻蚀机台 |
| US10049904B1 (en) * | 2017-08-03 | 2018-08-14 | Applied Materials, Inc. | Method and system for moving a substrate |
| JP6525044B1 (ja) * | 2017-12-13 | 2019-06-05 | オムロン株式会社 | 監視システム、学習装置、学習方法、監視装置及び監視方法 |
| CN108220962A (zh) * | 2017-12-29 | 2018-06-29 | 深圳市华星光电技术有限公司 | 控制湿法蚀刻终点的装置及方法 |
| US10727057B2 (en) * | 2018-03-20 | 2020-07-28 | Tokyo Electron Limited | Platform and method of operating for integrated end-to-end self-aligned multi-patterning process |
| US11069583B2 (en) | 2018-06-20 | 2021-07-20 | Veeco Instruments Inc. | Apparatus and method for the minimization of undercut during a UBM etch process |
| TW202000993A (zh) * | 2018-06-20 | 2020-01-01 | 美商維克精密表面處理股份有限公司 | 凸塊底層金屬蝕刻製程期間使底切最小化之裝置及方法 |
| JP7184547B2 (ja) * | 2018-06-27 | 2022-12-06 | 株式会社Screenホールディングス | 補正方法、基板処理装置、及び基板処理システム |
| WO2020154896A1 (en) * | 2019-01-29 | 2020-08-06 | Yangtze Memory Technologies Co., Ltd. | Intelligent customizable wet processing system |
| JP7166966B2 (ja) * | 2019-03-15 | 2022-11-08 | 株式会社Screenホールディングス | 処理条件選択方法、基板処理方法、基板製品製造方法、処理条件選択装置、コンピュータープログラム、および、記憶媒体 |
| JP7036085B2 (ja) * | 2019-04-17 | 2022-03-15 | 信越半導体株式会社 | シリコンウェーハのエッチング方法 |
| CN110349856B (zh) * | 2019-06-28 | 2021-04-27 | Tcl华星光电技术有限公司 | 湿式蚀刻方法及装置 |
| KR102705854B1 (ko) * | 2019-07-23 | 2024-09-11 | 에스케이하이닉스 주식회사 | 반도체 소자의 분석 시스템 및 방법 |
| JP7296300B2 (ja) * | 2019-10-29 | 2023-06-22 | 倉敷紡績株式会社 | 基板のエッチング方法 |
| EP4059047A4 (en) * | 2019-11-15 | 2024-01-03 | Veeco Instruments Inc. | APPARATUS AND METHOD FOR MINIMIZING UNDERCURVING DURING A UBM ETCHING PROCESS |
| US20230160071A1 (en) * | 2020-02-18 | 2023-05-25 | Posco | Process control system and operating method therefor |
| TWI770785B (zh) * | 2021-01-22 | 2022-07-11 | 南亞科技股份有限公司 | 半導體製造系統、測量裝置及半導體製造方法 |
| CN113050564B (zh) * | 2021-03-12 | 2022-04-26 | 中国科学院近代物理研究所 | 核孔膜蚀刻线自反馈联动生产控制装置 |
| US12004307B2 (en) | 2021-06-09 | 2024-06-04 | International Business Machines Corporation | Short or near short etch rework |
| CN114063479B (zh) * | 2021-11-12 | 2024-01-23 | 华科电子股份有限公司 | 应用于蚀刻机的多路输出模块的射频电源控制方法及系统 |
| DE102021131839B4 (de) * | 2021-12-02 | 2023-11-23 | Hueck Rheinische Gmbh | Verfahren zum Herstellen eines Presswerkzeugs mit tiefer Strukturierung |
| CN114628268B (zh) * | 2022-05-12 | 2022-07-29 | 广东气派科技有限公司 | 一种防超时的芯片产品腐球检验工艺 |
| CN116504682B (zh) * | 2023-06-20 | 2024-04-02 | 深圳市鲁光电子科技有限公司 | 一种碳化硅mosfet制备用蚀刻装置 |
| CN116666198B (zh) * | 2023-07-26 | 2024-01-12 | 恒超源洗净科技(深圳)有限公司 | 一种半导体器件全自动超声波清洗方法及系统 |
| CN117174621B (zh) * | 2023-10-30 | 2023-12-26 | 江苏卓玉智能科技有限公司 | 一种晶圆蚀刻工艺的流量控制方法及系统 |
| CN118486616B (zh) * | 2024-07-11 | 2024-09-27 | 江苏浦丹光电技术有限公司 | 一种光学调制器芯片加工用刻蚀装置 |
Family Cites Families (26)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5846643A (ja) * | 1981-09-12 | 1983-03-18 | Mitsubishi Electric Corp | ウエハ処理法 |
| JPH07145484A (ja) * | 1993-11-19 | 1995-06-06 | Ebara Corp | 二酸化ケイ素被膜の製造方法及び装置 |
| JPH11220005A (ja) * | 1997-11-26 | 1999-08-10 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JPH11251289A (ja) * | 1998-02-27 | 1999-09-17 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板処理方法 |
| TW380284B (en) * | 1998-09-09 | 2000-01-21 | Promos Technologies Inc | Method for improving etching uniformity during a wet etching process |
| JP2002134466A (ja) * | 2000-10-25 | 2002-05-10 | Sony Corp | 半導体装置の製造方法 |
| US20060191637A1 (en) * | 2001-06-21 | 2006-08-31 | John Zajac | Etching Apparatus and Process with Thickness and Uniformity Control |
| US20030084918A1 (en) * | 2001-11-07 | 2003-05-08 | Kim Yong Bae | Integrated dry-wet processing apparatus and method for removing material on semiconductor wafers using dry-wet processes |
| US7128803B2 (en) * | 2002-06-28 | 2006-10-31 | Lam Research Corporation | Integration of sensor based metrology into semiconductor processing tools |
| JP2004335923A (ja) * | 2003-05-12 | 2004-11-25 | Sony Corp | エッチング方法およびエッチング装置 |
| EP1652224A2 (en) * | 2003-07-31 | 2006-05-03 | FSI International, Inc. | Controlled growth of highly uniform, oxide layers, especially ultrathin layers |
| DE102004054566B4 (de) * | 2004-11-11 | 2008-04-30 | Siltronic Ag | Verfahren und Vorrichtung zum Einebnen einer Halbleiterscheibe sowie Halbleiterscheibe mit verbesserter Ebenheit |
| US8882787B2 (en) * | 2005-03-02 | 2014-11-11 | St. Jude Medical, Cardiology Division, Inc. | Tissue anchor apparatus |
| US20070122920A1 (en) | 2005-11-29 | 2007-05-31 | Bornstein William B | Method for improved control of critical dimensions of etched structures on semiconductor wafers |
| JP4921913B2 (ja) * | 2006-10-02 | 2012-04-25 | 株式会社東芝 | 基板洗浄方法 |
| JP2008177329A (ja) * | 2007-01-18 | 2008-07-31 | Mitsubishi Electric Corp | ウエットエッチング方法 |
| MY150211A (en) | 2007-12-07 | 2013-12-13 | Fontana Technology | Particle removal cleaning method and composition |
| US7972969B2 (en) * | 2008-03-06 | 2011-07-05 | Taiwan Semiconductor Manufacturing Co., Ltd. | Method and apparatus for thinning a substrate |
| JP5458525B2 (ja) * | 2008-08-05 | 2014-04-02 | 株式会社Sumco | Soiウェーハの製造方法 |
| US8691664B2 (en) * | 2009-04-20 | 2014-04-08 | Taiwan Semiconductor Manufacturing Company, Ltd. | Backside process for a substrate |
| JP2011071415A (ja) * | 2009-09-28 | 2011-04-07 | Covalent Materials Corp | シリコンウエハの製造方法 |
| GB2478590A (en) * | 2010-03-12 | 2011-09-14 | Precitec Optronik Gmbh | Apparatus and method for monitoring a thickness of a silicon wafer |
| KR101233687B1 (ko) * | 2010-10-28 | 2013-02-15 | 삼성디스플레이 주식회사 | 유리 기판 식각 장치 |
| US8455984B2 (en) * | 2010-11-15 | 2013-06-04 | Nanya Technology Corp. | Integrated circuit structure and method of forming the same |
| US20120285483A1 (en) * | 2011-05-12 | 2012-11-15 | Li-Chung Liu | Method of cleaning a wafer |
| CN102923962B (zh) * | 2012-10-26 | 2015-06-17 | 航天科工惯性技术有限公司 | 一种加速度计摆片平桥的蚀刻方法 |
-
2013
- 2013-02-28 US US13/780,657 patent/US9698062B2/en active Active
-
2014
- 2014-02-14 SG SG11201506667WA patent/SG11201506667WA/en unknown
- 2014-02-14 JP JP2015560205A patent/JP2016515300A/ja active Pending
- 2014-02-14 CN CN201480013838.2A patent/CN105209402B/zh not_active Expired - Fee Related
- 2014-02-14 WO PCT/US2014/016479 patent/WO2014133792A1/en active Application Filing
- 2014-02-14 KR KR1020157023130A patent/KR20150122661A/ko not_active Application Discontinuation
- 2014-02-18 TW TW103105331A patent/TWI613719B/zh active
-
2019
- 2019-04-26 JP JP2019085304A patent/JP2019153803A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20180133939A (ko) * | 2016-05-06 | 2018-12-17 | 어플라이드 머티어리얼스, 인코포레이티드 | 에칭 시스템을 위한 웨이퍼 프로파일링 |
| US11501986B2 (en) | 2016-05-06 | 2022-11-15 | Applied Materials, Inc. | Wafer profiling for etching system |
| KR20180067408A (ko) * | 2016-12-12 | 2018-06-20 | 미쓰비시덴키 가부시키가이샤 | 반도체 장치의 제조 방법 |
| KR20200053399A (ko) | 2018-11-08 | 2020-05-18 | 한양대학교 산학협력단 | 2단자 사이리스터 메모리 소자의 제조방법 |
| KR20200130642A (ko) * | 2019-05-09 | 2020-11-19 | 사이언테크 코포레이션 | 기판을 처리하기 위한 장치 및 상기 장치를 이용한 기판을 식각하는 절차를 제어하기 위한 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105209402B (zh) | 2018-07-24 |
| TW201501192A (zh) | 2015-01-01 |
| US9698062B2 (en) | 2017-07-04 |
| TWI613719B (zh) | 2018-02-01 |
| WO2014133792A1 (en) | 2014-09-04 |
| US20140242731A1 (en) | 2014-08-28 |
| SG11201506667WA (en) | 2015-09-29 |
| JP2016515300A (ja) | 2016-05-26 |
| JP2019153803A (ja) | 2019-09-12 |
| CN105209402A (zh) | 2015-12-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9698062B2 (en) | System and method for performing a wet etching process | |
| US10553502B2 (en) | Two etch method for achieving a wafer thickness profile | |
| US9870928B2 (en) | System and method for updating an arm scan profile through a graphical user interface | |
| EP3811398B1 (en) | Apparatus and method for the minimization of undercut during a ubm etch process | |
| US10541180B2 (en) | Apparatus and method for wafer thinning in advanced packaging applications | |
| EP3440027B1 (en) | Method to control etch rate through adaptive spiking of chemistry | |
| TWI680497B (zh) | 智慧可制定濕式處理系統 | |
| TW202135187A (zh) | 凸塊底層金屬蝕刻製程期間使底切最小化之裝置及方法 | |
| US11069583B2 (en) | Apparatus and method for the minimization of undercut during a UBM etch process | |
| KR101743492B1 (ko) | 기판처리장치 및 방법 | |
| TW202426870A (zh) | 半導體設備之狀態的多感測器判定 | |
| JP2011155081A (ja) | 流量測定装置及び流量測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A201 | Request for examination | ||
| E902 | Notification of reason for refusal | ||
| E601 | Decision to refuse application |