KR20140099195A - 안굴절력 측정 장치 - Google Patents
안굴절력 측정 장치 Download PDFInfo
- Publication number
- KR20140099195A KR20140099195A KR1020140009735A KR20140009735A KR20140099195A KR 20140099195 A KR20140099195 A KR 20140099195A KR 1020140009735 A KR1020140009735 A KR 1020140009735A KR 20140009735 A KR20140009735 A KR 20140009735A KR 20140099195 A KR20140099195 A KR 20140099195A
- Authority
- KR
- South Korea
- Prior art keywords
- eye
- measurement
- refractive power
- examined
- force
- Prior art date
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/0091—Fixation targets for viewing direction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B3/00—Apparatus for testing the eyes; Instruments for examining the eyes
- A61B3/10—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions
- A61B3/103—Objective types, i.e. instruments for examining the eyes independent of the patients' perceptions or reactions for determining refraction, e.g. refractometers, skiascopes
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Biophysics (AREA)
- Ophthalmology & Optometry (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Physics & Mathematics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Eye Examination Apparatus (AREA)
Abstract
[과제] 피검안의 근방에서의 굴절력을 양호하게 측정할 수 있는 안굴절력 측정 장치를 제공한다.
[해결 수단] 피검안의 안저에 측정광을 투광하고, 안저로부터의 반사광에 기초하여 피검안의 안굴절력을 측정하는 측정 수단과, 피검안에 대해 고시표를 정시하는 고시표 정시 수단과, 피검안에 정시되는 고시표의 정시 위치를 이동시키기 위한 구동 수단과, 구동 수단을 제어하여 고시표의 정시 위치를 원방에서 근방으로 이동시키는 제어 수단을 구비하고, 적어도 원방 위치 및 근방 위치에서의 안굴절력을 측정 가능한 안굴절력 측정 장치로서, 제어 수단은, 구동 수단을 제어하여, 고시표를 원방에서 근방으로 이동시키는 동안에, 구동 수단의 제어량을 변경할 수 있다.
[해결 수단] 피검안의 안저에 측정광을 투광하고, 안저로부터의 반사광에 기초하여 피검안의 안굴절력을 측정하는 측정 수단과, 피검안에 대해 고시표를 정시하는 고시표 정시 수단과, 피검안에 정시되는 고시표의 정시 위치를 이동시키기 위한 구동 수단과, 구동 수단을 제어하여 고시표의 정시 위치를 원방에서 근방으로 이동시키는 제어 수단을 구비하고, 적어도 원방 위치 및 근방 위치에서의 안굴절력을 측정 가능한 안굴절력 측정 장치로서, 제어 수단은, 구동 수단을 제어하여, 고시표를 원방에서 근방으로 이동시키는 동안에, 구동 수단의 제어량을 변경할 수 있다.
Description
본 발명은, 피검안의 안굴절력치를 측정하는 안굴절력 측정 장치에 관한 것이다.
피검안의 굴절력을 타각적 (他覺的) 으로 측정하는 안굴절력 측정 장치에 있어서, 피검안이 고시 (固視) 하는 고시표의 정시 (呈示) 거리 (정시 위치) 를 원점에서 근점으로 복수의 정시 거리로 변경시키고, 원점과 근점에서 측정한 굴절력에 기초하여 피검안의 조절력 (폭) 을 구하여, 피검안의 가입도의 결정에 이용하는 안굴절력 측정 장치가 알려져 있다 (특허문헌 1 참조).
그런데, 종래 장치에 있어서, 근방에서의 굴절력을 측정하는 경우, 고시표를 원방에서 근방으로 이동시키는 동안에 있어서의 고시표의 이동 속도가 일정하였다. 따라서, 피검안에 대한 정시 거리가 근방에 가까워져 왔을 때, 피검안의 추종이 따라잡지 못하여, 피검안은 추종을 포기하는 경우가 있다.
예를 들어, 피검안의 조절력을 측정하는 경우에 있어서는, 추종을 포기한 단계에서의 안굴절력에 기초하여 조절력이 산출된다. 그러나, 추종을 포기한 위치는, 반드시 피검안의 조절력의 한계 위치라고는 할 수 없고, 피검안의 조절력은, 더욱 큰 경우도 있을 수 있다. 본 발명은, 상기 문제점을 감안하여, 피검안의 근방에서의 굴절력을 양호하게 측정할 수 있는 안굴절력 측정 장치를 제공하는 것을 기술 과제로 한다.
상기 과제를 해결하기 위하여, 본 발명은 이하와 같은 구성을 구비하는 것을 특징으로 한다.
피검안의 안저 (眼底) 에 측정광을 투광하고, 상기 안저로부터의 반사광에 기초하여 상기 피검안의 안굴절력을 측정하는 측정 수단과, 상기 피검안에 대해 고시표를 정시하는 고시표 정시 수단과, 상기 피검안에 정시되는 상기 고시표의 정시 위치를 이동시키기 위한 구동 수단과, 상기 구동 수단을 제어하여 상기 고시표의 정시 위치를 원방에서 근방으로 이동시키는 제어 수단을 구비하고, 적어도 원방 위치 및 근방 위치에서의 안굴절력을 측정 가능한 안굴절력 측정 장치로서, 상기 제어 수단은, 상기 구동 수단을 제어하여, 상기 고시표를 원방에서 근방으로 이동시키는 동안에, 상기 구동 수단의 제어량을 변경할 수 있는 것을 특징으로 한다.
본 발명에 의하면 피검안의 근방에서의 굴절력을 양호하게 측정할 수 있다.
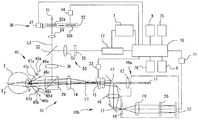
도 1 은 본 발명에 관련된 안굴절력 측정 장치의 외관도이다.
도 2 는 광학계 및 제어부의 개략 구성도이다.
도 3 은 링 렌즈의 구성에 대해 설명하는 개략도이다.
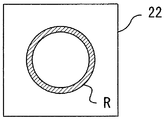
도 4 는 촬상 소자 (22) 에 촬상된 링 이미지이다.
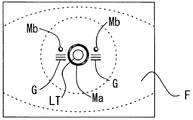
도 5 는 모니터 (7) 에 표시되는 전안부 이미지 및 각종 지표 이미지를 나타낸 도면이다.
도 6 은 조절력 측정 모드에서 사용하는 제 1 고시표판이다.
도 7 은 조절력 측정을 설명하는 플로우 차트도이다.
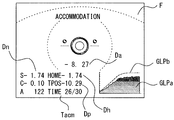
도 8 은 조절력 측정 중의 모니터 (7) 의 표시예이다.
도 9 는 모니터 (7) 에 표시되는 조절력 측정 결과의 화면이다.
도 10 은 조절력 측정 결과를 포함한 측정 결과의 인쇄예이다.
도 2 는 광학계 및 제어부의 개략 구성도이다.
도 3 은 링 렌즈의 구성에 대해 설명하는 개략도이다.
도 4 는 촬상 소자 (22) 에 촬상된 링 이미지이다.
도 5 는 모니터 (7) 에 표시되는 전안부 이미지 및 각종 지표 이미지를 나타낸 도면이다.
도 6 은 조절력 측정 모드에서 사용하는 제 1 고시표판이다.
도 7 은 조절력 측정을 설명하는 플로우 차트도이다.
도 8 은 조절력 측정 중의 모니터 (7) 의 표시예이다.
도 9 는 모니터 (7) 에 표시되는 조절력 측정 결과의 화면이다.
도 10 은 조절력 측정 결과를 포함한 측정 결과의 인쇄예이다.
이하, 본 발명의 실시형태에 관련된 안굴절력 측정 장치에 대해, 도면에 기초하여 설명한다. 도 1 은, 실시형태에 관련된 장치의 외관 구성도이다. 측정 장치는 기대 (基臺) (1) 와, 기대 (1) 에 장착된 얼굴 지지 유닛 (2) 과, 기대 (1) 상에 이동 가능하게 형성된 이동대 (3) 와, 이동대 (3) 에 이동 가능하게 형성되고, 후술하는 광학계를 수납하는 측정부 (4) 를 구비한다. 측정부 (4) 는 이동대 (3) 에 형성된 XYZ 구동부 (6) 에 의해, 피검안 (E) 에 대해 좌우 방향 (X 방향), 상하 방향 (Y 방향) 및 전후 방향 (Z 방향) 으로 이동된다. XYZ 구동부 (6) 는, X, Y, Z 의 방향마다 형성된 슬라이드 기구, 모터 등으로 구성된다. 이동대 (3) 는, 조이스틱 (5) 의 조작에 의해, 기대 (1) 상을 X 방향 및 Z 방향으로 이동되고, 회전 노브 (5a) 를 회전 조작함으로써, XYZ 구동부 (6) 의 Y 구동에 의해 Y 방향으로 이동된다. 이동대 (3) 에는 피검안 (E) 의 관찰 이미지나 측정 결과 등의 각종 정보를 표시하는 모니터 (7), 각종 설정을 실시하기 위한 스위치가 배치된 스위치부 (8) 가 형성되어 있다.
도 2 는, 본 장치의 광학계 및 제어계의 개략 구성도이다. 측정 광학계 (10) 는, 피검안 (E) 의 동공 중심부를 통하여 피검안 (E) 의 안저 (Ef) 에 스폿상의 측정 지표 광속을 투영하는 투영 광학계 (10a) 와, 안저 (Ef) 로부터 반사된 측정 지표 광속을 동공 주변부를 통하여 링상으로 취출하는 수광 광학계 (10b) 로 구성된다.
투영 광학계 (10a) 는, 측정 광학계 (10) 의 광축 (L1) 상에 배치된, LED 나 SLD 등의 측정용 적외 점광원 (11), 릴레이 렌즈 (12), 홀 미러 (13), 구동부 (23) 에 의해 광축 (L1) 을 중심으로 회전되는 프리즘 (15), 및 대물 렌즈 (14) 를 구비하고, 투광 수단이 된다. 측정용 적외 점광원 (11) 은, 정시안의 안저 (Ef) 와 광학적으로 공액인 위치 관계로 되어 있다. 또, 홀 미러 (13) 의 개구는, 피검안 (E) 의 동공과 광학적으로 공액인 위치 관계로 되어 있다. 또한, 본 명세서에서 말하는 「공액」이란, 엄밀하게 공액일 필요는 없고, 측정 정밀도와의 관계에서 필요하게 되는 정밀도로 공액이면 되는 것을 의미한다.
수광 광학계 (10b) 는, 투영 광학계 (10a) 의 대물 렌즈 (14), 프리즘 (15), 및 홀 미러 (13) 가 공용되고, 홀 미러 (13) 의 반사 방향의 광축 (L1) 상에 배치된, 릴레이 렌즈 (16) 및 전반사 미러 (17) 와, 전반사 미러 (17) 의 반사 방향의 광축 (L1) 상에 배치된, 수광 조리개 (18), 콜리메이터 렌즈 (19), 링 렌즈 (20), 및 에어리어 CCD 등으로 이루어지는 촬상 소자 (22) 를 구비한다. 수광 조리개 (18) 및 촬상 소자 (22) 는, 안저 (Ef) 와 광학적으로 공액인 위치 관계로 되어 있다. 링 렌즈 (20) 는, 도 3(a) 및 (b) 에 나타내는 바와 같이, 투명 평판상의 편측에 원통 렌즈가 링상으로 형성된 렌즈부 (20a) 와, 렌즈부 (20a) 의 링상 원통 렌즈 부분 이외에 실시된 차광용 코팅에 의한 차광부 (20b) 로 구성되고, 피검안 (E) 의 동공과 광학적으로 공액인 위치 관계로 되어 있다. 촬상 소자 (22) 로부터의 출력은, 화상 메모리 (71) 를 통하여 제어부 (70) 에 입력된다.
대물 렌즈 (14) 와 피검안 (E) 사이에는, 고시표 정시 광학계 (30) 로부터의 고시표 광속을 피검안 (E) 으로 유도하여 피검안 (E) 의 전안부로부터의 반사광을 관찰 광학계 (50) 로 유도하는 빔 스플리터 (하프 미러) (29) 가 배치되어 있다. 본 실시형태에 있어서, 고시표 정시 광학계 (30) 는, 피검안에 대해 고시표를 정시하는 고시표 정시 수단으로서 사용된다. 고시표 정시 광학계 (30) 는, 예를 들어, 빔 스플리터 (29) 에 의해 광축 (L1) 과 동축으로 된 광축 (L2) 상에 배치된, 고시표 정시용 가시 광원 (31), 고시표를 갖는 고시표판 (32), 투광 렌즈 (33), 하프 미러 (35), 및 관찰용 대물 렌즈 (36) 를 구비한다. 고시표 정시용 가시 광원 (31) 및 고시표판 (32) 은, 제어부 (70) 가 구동부 (37) 를 제어하여 광축 (L2) 방향으로 이동됨으로써, 피검안 (E) 의 운무를 실시한다. 또한, 고시표판 (32) 으로서 타각 원용 (遠用) 굴절력 측정시에 사용하는 제 1 고시표판 (32a) 과, 피검안 (E) 의 조절력 측정시에 사용하는 제 2 고시표판 (32b) 의 2 종류를 구비한다.
또, 제 1 고시표판 (32a) 과 제 2 고시표판 (32b) 은, 제어부 (70) 가 구동부 (34) 를 구동시킴으로써 전환할 수 있다. 본 실시형태에서는 구동부 (37) 에 액추에이터로서 스테핑 모터를 사용하고, 기준 위치가 되는 포토 인터럽터를 병용한다. 스테핑 모터와 포토 인터럽터에 의해, 구동부 (37) 를 제어하는 제어부 (70) 는 광축 (L2) 상의 고시표판 (32) 의 위치를 검지할 수 있다. 구동부 (37) 를 구성하는 부품은 본 실시형태에 한정되는 것이 아니다. 제어부 (70) 가 고시표판 (32) 을 이동 제어할 수 있고, 광축 (L2) 상의 위치를 검지할 수 있는 형태이면 된다. 또한, 본 실시형태에 있어서, 구동부 (27) 는, 상기 피검안에 정시되는 고시표의 정시 위치를 이동시키기 위한 구동 수단으로서 사용된다. 또, 본 실시형태에 있어서, 제어부 (70) 는, 구동부 (27) 를 제어하여 고시표의 정시 위치를 원방에서 근방으로 이동시키는 제어 수단으로서 사용된다.
Z 방향 얼라이먼트 지표 투영 광학계 (45) 는 전후 방향 (Z 방향) 검출용 얼라이먼트 지표를 투영하는 광학계로, 광축 (L1) 을 사이에 두고 대칭으로 배치된 2 세트의 제 1 투영 광학계 (45a, 45b) 와, 이 제 1 투영 광학계 (45a, 45b) 보다 좁은 각도로 배치된 광축을 갖고 측정 광축 (L1) 을 사이에 두고 대칭으로 배치된 2 세트의 제 2 투영 광학계 (45c, 45d) 를 구비한다. 제 1 투영 광학계 (45a, 45b) 는, 근적외광을 출사하는 점광원 (46a, 46b), 콜리메이터 렌즈 (47a, 47b) 를 갖고, 대략 평행 광속의 광에 의해 피검안 (E) 에 무한원의 지표를 투영한다. 한편, 제 2 투영 광학계 (45c, 45d) 는, 근적외광을 출사하는 점광원 (46c, 46d) 을 갖고, 발산 광속에 의해 피검안 (E) 에 유한원의 지표를 투영한다.
관찰 광학계 (50) 는, 고시표 정시 광학계 (30) 의 관찰용 대물 렌즈 (36) 및 하프 미러 (35) 가 공용되고, 하프 미러 (35) 의 반사 방향의 광축 상에 배치된 촬상 렌즈 (51) 및 촬상 소자 (52) 를 구비한다. 촬상 소자 (52) 는 피검안 (E) 의 전안부와 광학적으로 공액인 위치 관계로 되어 있다. 촬상 소자 (52) 로부터의 출력은 화상 처리부 (77) 를 통하여 제어부 (70) 및 모니터 (7) 에 입력된다. 도시하지 않은 전안부 조명용 광원에 의한 피검안 (E) 의 전안부 이미지는, 촬상 소자 (52) 에 의해 촬상되고, 모니터 (7) 상에 동영상으로서 표시된다. 또한, 이 관찰 광학계 (50) 는 피검안 (E) 의 각막에 형성되는 얼라이먼트 지표 이미지 (후술하는 지표 이미지 (Ma, Mb)) 를 검출하는 광학계를 겸한다. 화상 처리부 (77) 와 제어부 (70) 에 의해 얼라이먼트 지표 이미지 (후술하는 지표 이미지 (Ma, Mb)) 의 위치가 검출된다.
제어부 (70) 에는, 화상 메모리 (71), 메모리 (75), 화상 처리부 (77), 모니터 (7), XYZ 구동부 (6), 스위치부 (8) 등이 접속된다. 제어부 (70) 는, 장치 전체의 제어를 실시함과 함께, 피검안 (E) 의 굴절치 및 굴절력의 산출 등을 실시한다. 본 실시형태에서는, 메모리 (75) 는 기억 수단으로서 사용된다.
피검안의 굴절력을 구하는 경우, 제어부 (70) 는, 스위치부 (8) 로부터의 측정 개시 신호의 입력에 기초하여 측정용 적외 점광원 (11) 을 점등시킴과 함께, 프리즘 (15) 을 구동부 (23) 에 의해 고속 회전시킨다. 측정용 적외 점광원 (11) 으로부터 출사된 측정광은, 릴레이 렌즈 (12) 에서 빔 스플리터 (29) 까지를 통하여 안저 (Ef) 에 투영되고, 안저 (Ef) 상에서 회전하는 스폿상의 점광원 이미지를 형성한다. 이 때, 광축 (L1) 을 중심으로 회전하는 프리즘 (15) 에 의해, 홀 미러 (13) 의 개구의 눈동자 투영 이미지 (눈동자 상에서의 투영 광속) 는, 고속으로 편심 회전된다. 또한, 프리즘 (15) 은 촬상 소자 (22) 의 1 회의 노광 시간 (축광 (蓄光) 시간) 동안 2 회전하는 속도로 회전한다.
안저 (Ef) 상에 형성된 점광원 이미지의 광은, 반사·산란되어 피검안 (E) 을 사출하고, 대물 렌즈 (14) 에 의해 집광되고, 고속 회전하는 프리즘 (15) 에서 전반사 미러 (17) 까지를 통하여 수광 조리개 (18) 의 개구 상에서 다시 집광되고, 콜리메이터 렌즈 (19) 에서 대략 평행 광속 (정시안의 경우) 으로 되고, 링 렌즈 (20) 에 의해 링상 광속으로서 취출되어 링 이미지로서 촬상 소자 (22) 에 수광된다.
또한, 본 실시형태의 촬상 소자 (22) 및 촬상 소자 (52) 는 2 차원 촬상 소자로, CCD (Charge Coupled Device) 이미지 센서가 사용된다. 2 차원 촬상 소자에 CMOS (Complementary Metal Oxide Semiconductor) 이미지 센서를 사용해도 된다. 또, 본 실시형태의 촬상 소자 (22) 와 촬상 소자 (52) 는 신호의 입출력이 동기하여 동작한다. 촬상 소자 (22) 와 촬상 소자 (52) 의 촬상 간격은 1/30 초이고, 1 회의 노광 시간도 1/30 초이다.
이상과 같은 구성을 구비하는 장치에 있어서, 그 동작을 설명한다. 본 실시형태의 안굴절력 측정 장치는, 통상적인 타각 원용 굴절력을 측정하는 타각 원용 굴절력 측정 모드와, 피검안 (E) 의 조절력을 측정하는 조절력 측정 모드를 구비한다. 먼저, 타각 원용 굴절력 측정 모드에 대해 설명하고, 계속하여 조절력 측정 모드에 대해 설명한다. 또한, 타각 원용 굴절력 측정 모드는 고시표를 원방에 배치시켜 피검안 (E) 의 안굴절력을 양호한 정밀도로 구하는 측정 모드이다. 조절력 측정 모드는 고시표의 정시 거리를 변화시켜 원점과 근점을 검출하고, 피검안 (E) 의 조절력 (폭) 을 구하는 측정 모드이다.
피검사자의 얼굴을 얼굴 지지 유닛 (2) 에 고정시킨 후, 피검안 (E) 의 각막에 얼라이먼트 지표를 투영하고, 측정부 (4) 와 피검안의 위치 맞춤을 실시한다. 또한, 피검안 (E) 에 대한 위치 맞춤 전에, 검사자는 스위치부 (8) 를 조작하여 타각 원용 굴절력 측정 모드를 선택해 둔다. 제어부 (70) 는, 촬상 소자 (52) 로부터의 촬상 신호에 기초하여 피검안 (E) 에 대한 얼라이먼트 상태를 검출한다. 제어부 (70) 는 지표 이미지 (Ma) 의 중심 위치 (대략 각막 중심) 를 산출함으로써 XY 방향의 얼라이먼트 어긋남을 구한다. Z 방향의 얼라이먼트 상태는 Z 방향 얼라이먼트 지표 투영 광학계 (45) 에 의해 형성되는 4 개의 지표 이미지의 위치 관계로부터 검출된다. Z 방향의 얼라이먼트 상태의 적부는, 제 1 투영 광학계 (45a, 45b) 에 의한 2 개의 무한원 지표 이미지의 이미지 간격과 제 2 투영 광학계 (45c, 45d) 에 의한 유한 원지표 이미지의 이미지 간격을 비교함으로써 검출된다. 무한원 시표 (視標) 의 투영에서는, Z 방향이 변화해도, 그 이미지 간격은 거의 변화되지 않는다. 한편, 유한원 시표의 투영에서는, Z 방향의 변화에 수반하여 그 이미지 간격이 변화한다. 이 특성을 이용하여 Z 방향의 얼라이먼트 상태를 판정할 수 있다 (일본 공개특허공보 평6-46999호 참조). 제어부 (70) 는, Z 방향의 얼라이먼트 검출 결과에 기초하여 인디케이터 (G) 의 수를 증감시킨다.
제어부 (70) 는 광원 (46c, 46d) 에 의해 형성되는 지표 이미지에 기초하여 측정부 (4) 를 XY 방향으로 이동시키고, Z 방향 얼라이먼트 지표 투영 광학계 (45) 에 의해 형성되는 4 개의 지표 이미지에 기초하여 측정부 (4) 를 Z 방향으로 이동시킨다. XYZ 의 각 방향의 얼라이먼트 상태가 각각 소정의 허용 범위에 들어가면, 제어부 (70) 는 얼라이먼트 완료를 판단하고, 측정 개시 신호를 자동적으로 발하여 측정을 실행한다. 수동 측정의 경우에는, 검사자가 조이스틱 (5) 등을 조작하여 얼라이먼트 완료시킨 후, 도시하지 않은 측정 개시 스위치를 눌러 측정 개시 신호를 입력한다.
트리거 신호가 출력되면, 제어부 (70) 는, 측정용 적외 점광원 (11) 을 점등시켜 안저 (Ef) 에 측정 지표를 투광한다. 그리고, 제어부 (70) 는, 그 반사광을 촬상 소자 (22) 에 의해 수광하고, 지표 이미지 (링 이미지 (R)) 를 검출한다. 이 때, 처음에 예비 측정이 실시되고, 그 결과에 기초하여 고시표 정시용 가시 광원 (31) 및 고시표판 (32) 이 광축 방향으로 이동되고, 피검안 (E) 에 대해 운무가 끼인다. 그 후, 피검안 (E) 에 대해 본 측정이 실시된다.
도 4 는, 측정 개시 신호를 트리거로 하여 측정이 실행됨으로써, 촬상 소자 (22) 에서 촬상된 링 이미지이다. 촬상 소자 (22) 로부터의 출력 신호는, 화상 메모리 (71) 에 화상 데이터 (링 화상) 로서 기억된다. 또한, 본 실시형태의 본 측정에서는, 촬상 소자 (22) 에 링 화상 (링 이미지 (R)) 을 연속하여 촬상시켜, 링 화상의 가산/축적 처리를 실시한다. 가산 처리의 횟수가 1 ∼ 2 회를 기본으로 하고, 촬상 소자 (22) 에 링 화상을 연속하여 촬상시켜, 가산 처리를 실시하기 위한 화상 데이터로서 화상 메모리 (71) 에 복수의 화상 데이터를 기억시킨다.
그 후, 제어부 (70) 는, 화상 메모리 (71) 에 기억된 복수의 화상을 사용하여, 가산한 화상 데이터를 생성한다. 제어부 (70) 는 화상 데이터에 기초하여 각 경선 방향으로 링 이미지의 위치를 특정한다 (세선화한다). 제어부 (70) 는, 휘도 신호의 파형을 소정의 임계값에서 절단하고, 그 절단 위치에서의 파형의 중간점이나, 휘도 신호의 파형의 피크, 휘도 신호의 중심 위치 등을 구함으로써 링 이미지의 위치를 특정한다. 또한, 가산 처리에 의해 화상 데이터에 중첩되는 노이즈 광을 억제함으로써, 양호한 정밀도로 측정 결과를 구하는 것이 가능해진다 (상세하게는, 일본 공개특허공보 2006-187482호 참조).
다음으로, 제어부 (70) 는, 특정된 링 이미지의 이미지 위치에 기초하여, 최소 이승법 등을 사용하여 타원 이미지를 근사한다. 또한, 타원 근사의 방법으로는, 안굴절력 측정이나 각막 형상 측정 등으로 주지인 타원 근사의 식을 사용할 수 있다. 그리고, 근사된 타원의 형상으로부터 각 경선 방향의 굴절 오차를 구할 수 있으므로, 이것에 기초하여 피검안의 안굴절치, S (구면 도수), C (주면 (柱面) 도수), A (난시축 각도) 의 각 값이 연산되고, 측정 결과가 모니터 (7) 에 표시된다.
계속하여, 도 7 을 사용하여 조절력 측정 모드의 플로우를 설명한다. 제어부 (70) 는 스위치부 (8) 로부터의 입력 신호에 기초하여 검사자가 측정 모드를 타각 원용 굴절력 측정 모드로부터 조절력 측정 모드로 변경한 것을 검출한다. 또한, 조절력 측정 모드는 타각 원용 굴절력 측정 모드와 마찬가지로, 촬상 소자 (52) 의 출력 신호에 기초하여 모니터 (7) 에 피검안의 전안부 이미지 (F) (동영상) 가 표시된다. 또, 얼라이먼트 검출 및 측정부 (4) 의 XYZ 방향의 이동도 타각 원용 굴절력 측정 모드와 마찬가지로 하여 실시된다.
도 7 의 플로우에 있어서, 제어부 (70) 는, 구동부 (37) 를 제어하여, 고시표를 원방에서 근방으로 이동시키는 동안에, 구동부 (37) 의 제어량을 변경한다 (도 7의 단계 S108 ∼ S111 참조). 또한, 본 실시형태에서는, 고시표로서 제 2 고시표판 (32b) 이 사용되는데, 물론 이것에 한정되지 않고, 제 1 고시표판 (32a) 을 사용하도록 해도 된다. 제어량을 변경시키는 경우, 예를 들어, 제어부 (70) 는, 고시표를 원방에서 근방으로 이동시키는 동안에 고시표의 이동 속도, 또는 고시표를 원방에서 근방으로 단계적으로 이동시키는 동안에 각 단계에 있어서의 이동량의 적어도 어느 것을 변경한다.
고시표가 원방에서 근방까지 이동되는 동안, 본 실시형태에서는, 제어부 (70) 는, 고시표의 정시 위치 정보, 안굴절력의 측정 결과를, 리얼 타임으로 모니터링한다. 이들 모니터링 결과는, 제어량의 변경에 사용된다. 모니터링에 있어서, 예를 들어, 제어부 (70) 는, 정시 위치 정보 및 측정 결과를 연속적 또는 소정의 시간 간격으로 취득하고, 수시 갱신한다. 또한, 제어부 (70) 는, 각 위치에서의 측정 결과를, 정시 위치와 관련지어 메모리 (74) 에 기억해 두도록 해도 된다.
모니터링 결과를 사용하여 제어량을 변경하는 경우, 본 실시형태에서는, 도 7 에 나타내는 바와 같이, 제어부 (70) 는, 고시표의 정시 위치 정보와, 정시 거리에 있어서의 안굴절력의 측정 결과에 기초하여 제어량을 변경하게 되어 있다. 이로써, 피검안의 고시표에 대한 추종 상태가 제어량에 반영된다. 예를 들어, 제어부 (70) 는, 고시표의 정시 위치가 안굴절치에 대해 허용 범위를 초과하면, 고시표의 이동 속도 또는 각 단계에 있어서의 이동량을 떨어뜨리도록 해도 된다. 또, 제어부 (70) 는, 고시표의 정시 위치가 현재에서의 측정시에 있어서의 안굴절치에 대해 허용 범위를 초과하지 않도록, 고시표의 이동을 제어하도록 해도 된다. 또한, 고시표의 정시 위치와 안굴절력의 측정 결과는, 예를 들어, 디옵터치 (D), 거리치 (m) 중 어느 것으로 환산되어 사용된다. 또한, 제어부 (70) 는, 고시표의 정시 위치가, 고시표가 원방에서 근방까지 이동되는 동안에 측정된 가장 마이너스측의 측정 결과에 대해, 설정된 임계값 이상 떨어지지 않도록, 구동부 (37) 의 제어량을 변경하도록 해도 된다.
도 8 은 조절력 측정 모드에서의 모니터 (7) 의 표시 화면을 나타낸다. 모니터 (7) 에는 피검안의 전안부 이미지 (F) (동영상), 타각 원용 굴절력 측정 모드로 측정한 측정치 (S, C, A), 조절력을 측정 중의 굴절력 (디옵터) 의 최소치를 나타내는 굴절력 최소치 (Dh), 현재의 고시표의 정시 거리를 디옵터로 환산한 고시표 환산치 (Dp), 조절력의 측정을 개시하고 나서의 경과 시간을 나타내는 측정 경과 시간 (Tacm) 이 표시된다. 후술하는 바와 같이, 원점이 되는 굴절력 최소치 (Dh) 로부터 현재의 고시표의 정시 거리에 있어서 측정한 굴절력을 감산하여 구한 직근 (直近) 조절력 (Da), 고시표의 정시 거리의 변화에 수반되는 직근 조절력 (Da) 의 변화를 나타내는 굴절력 변화 그래프 (GLPa), 이동하는 고시표의 정시 거리를 디옵터로 환산하여 묘화한 고시표 환산 그래프 (GLPb) 가 조절력의 측정 중에 표시된다. 또한, 굴절력 변화 그래프 (GLPa) 와 고시표 환산 그래프 (GLPb) 의 횡축의 단위는 시간 (초) 이고, 종축의 단위는 디옵터 (디옵터치) 를 나타낸다.
<단계 S101>
제어부 (70) 는 구동부 (34) 를 제어하고, 고시표판 (32) 의 종류를 타각 원용 굴절력 측정 모드에서 사용하고 있던 제 1 고시표판 (32a) 에서, 조절력 측정 모드로 사용하는 제 2 고시표판 (32b) 으로 변경한다. 도 6 은 조절력 측정 모드로 사용하는 제 2 고시표판 (32b) 이다. 제 2 고시표판 (32b) 은 원이나 선으로 구성된 기하학 도안이나 문자로 구성된다. 또한, 본 실시형태에서는 타각 원용 굴절력 측정 모드와 조절력 측정 모드에서 고시표판 (32) 의 도안을 변경하지만, 이것에 한정되는 것은 아니다. 타각 원용 굴절력 측정 모드와 조절력 측정 모드에서 동일한 도안의 고시표판을 사용해도 된다.
<단계 S102>
제어부 (70) 는 구동부 (37) 를 제어하고, 고시표의 정시 거리를 타각 원용 굴절력 측정 모드에서 측정한 원용 굴절력 (Dn) 에 대해 0.5 디옵터만큼 원방으로 어긋난 위치로 이동시킨다. 또한, 조절력 측정 모드에서는 고시표의 정시 거리를 원방에서 근방으로 이동시킨다. 타각 원용 굴절력 측정 모드에서 양호한 정밀도 로 측정한 피검안 (E) 의 원용 굴절력 (Dn) 보다 원방에 지표를 배치하고, 원방에서 근방을 향하는 조절력의 측정 중에 고시표의 정시 거리가 피검안 (E) 의 원용 굴절력 (Dn) 이 되는 거리를 통과시킴으로써, 조절력 측정의 초기 단계에서 고시표의 추종성 (시인성) 을 확보하고, 원점을 신속하게 검출할 수 있는 효과가 있다.
<단계 S103>
제어부 (70) 는 단계 S101 에서 고시표의 변경, 단계 S102 에서 고시표의 이동이 완료되면, 조이스틱 (5) 의 선단에 배치되어 있는 도시하지 않은 스타트 스위치 상태를 감시한다. 검사자가 조절력 측정을 개시하기 위하여 스타트 스위치를 누른 것을 검출하면, 제어부 (70) 는 측정 개시 신호를 출력하여 단계 S104 로 진행된다. 스타트 스위치의 변화가 없는 동안에는 단계 S103 에서 측정을 대기한다. 또한, 조절력의 측정에 있어서는 피검안 (E) 이 정시 거리가 변화하는 고시표를 추종해 줄 필요가 있기 때문에, 검사자는 조절력 측정 모드에서 측정을 개시하기 전에 피검사자에게 변화하는 고시표의 정시 거리에 추종해 주도록 설명해 두는 것이 바람직하다. 따라서 본 실시형태에서는 타각 원용 굴절력 측정 모드와 달리, 제어부 (70) 는 피검안 (E) 과 측정부 (4) 의 얼라이먼트 상태가 소정의 허용 범위에 들어가 있어도 조절력의 측정을 자동으로 개시시키지 않고, 고시표의 변경과 고시표의 정시 위치의 정시 거리의 이동이 완료되면 모니터 (7) 에 준비 완료를 나타내는 메세지 또는 도안 (아이콘) 을 표시시킨다.
<단계 S104>
제어부 (70) 는 스타트 스위치가 눌린 것을 검출하면, 피검안 (E) 과 측정부 (4) 의 얼라이먼트 상태를 판정한다. 피검안 (E) 과 측정부 (4) 의 얼라이먼트 상태가 소정의 허용 범위 내에 들어가 있을 때에는 단계 S106 으로 진행된다. 피검안과 측정부 (4) 의 얼라이먼트 상태가 소정의 허용 범위에 들어가 있지 않을 때에는 단계 S105 로 진행된다. 또한, 소정의 허용 범위 내란 타각 원용 굴절력 측정 모드의 얼라이먼트 검출 조건과 동일하다.
<단계 S105>
단계 S105 에서는 스타트 스위치가 눌린 직후에 피검안 (E) 과 측정부 (4) 의 얼라이먼트 상태를 검출하고 나서, 얼라이먼트 상태가 소정의 허용 범위에 들어가지 않는 경과 시간을 소정의 판정 시간과 비교한다. 경과 시간이 소정의 판정 시간에 도달하지 않은 경우에는 단계 S104 로 되돌아간다. 경과 시간이 소정의 판정 시간에 도달하는 경우에는 측정을 중단하고 단계 S103 으로 되돌아간다. 또한, 본 실시형태에서는 스타트 스위치가 눌린 직후부터, 얼라이먼트 상태가 소정의 허용 범위에 들어가지 않는 경과 시간이 5 초 이상 계속되면 에러로 판정하여 측정을 정지시킨다. 또, 측정을 중단하고 단계 S103 으로 되돌아갈 때에는, 모니터 (7) 에 다시 스타트 스위치를 누름으로써 측정이 개시되는 것을 나타내는 도안 (아이콘) 을 표시시킨다.
<단계 S106>
제어부 (70) 는 촬상 소자 (22) 로부터 출력되는 수직 동기 신호를 감시하고, 촬상 소자 (22) 가 새롭게 노광 기간을 개시하는 타이밍을 기다린다. 새롭게 노광 기간을 개시하는 타이밍이 되면, 제어부 (70) 는 촬상 소자 (22) 로부터 출력되는 수직 동기 신호를 감시하여 굴절력을 구하기 위하여 필요한 노광 기간만큼 대기한다. 여기서, 타각 원용 굴절력 측정 모드 및 조절력 측정의 고시표의 초기의 정시 위치를 결정하기 위한 굴절력의 측정 방법 (제 1 굴절력 측정) 과, 조절력 측정 모드의 조절력의 측정 중에 측정하는 굴절력의 측정 방법 (제 2 굴절력 측정) 을 바꾸고 있다. 조절력 측정 중의 굴절력 측정 (제 2 굴절력 측정) 에서는 피검안 (E) 의 운무를 실시할 필요가 없고, 또, 조절력 측정 모드에서는 피검안 (E) 의 굴절력을 구하기 위하여 필요한 촬상 소자 (22) 의 노광 기간 (시간) 을, 타각 원용 굴절력 측정 모드에서 필요로 하는 대기 시간보다 짧은 시간으로 한다. 타각 원용 굴절력 측정 모드에서는 양호한 정밀도로 피검안 (E) 의 원용 굴절력을 측정하기 위하여 촬상 소자 (22) 의 출력 신호에 대해 가산 처리를 실시하지만, 조절력 측정 모드에서는 조속한 측정을 실시하기 위하여 가산 처리를 실시하지 않는다.
보다 상세하게는, 타각 원용 굴절력 측정 모드에서는 촬상 소자 (22) 로부터 1/30 초의 간격으로 순서대로 출력되는 출력 신호 (1 화상) 를 사용하여 1 ∼ 2 회의 가산을 실시한다. 2 회의 가산은 3 개의 화상으로 실시하기 때문에, 굴절력을 구하기 위하여 필요한 노광 시간으로서 최대로 약 100 ms 를 필요로 한다. 한편, 조절력 측정 모드에서는 가산을 실시하지 않고 1 화상만으로 굴절력을 구하기 때문에, 굴절력을 구하기 위하여 필요한 노광 시간은 1/30 초 (약 33 ms) 가 된다.
또한, 피검안 (E) 의 굴절력은 고시표의 정시 거리에 의해 변화한다. 촬상 소자 (22) 의 노광 기간 중에 고시표의 정시 거리를 이동 (변화) 시키면, 고시표의 정시 거리가 변화한 것에 수반하는 복수의 굴절력의 성분이 촬상 소자 (22) 가 수광하는 시표 이미지 (링 이미지) 에 중첩되어, 굴절력의 정밀도가 저하된다. 조절력의 측정은 피검안 (E) 의 굴절력의 변화에 기초하여 원점 및 근점을 구하기 때문에, 촬상 소자 (22) 의 노광 기간 중에 고시표의 정시 거리를 변화시키면 신뢰성이 부족한 굴절력으로 조절력을 구하게 된다. 따라서 본 실시형태의 조절력 측정은 고시표의 정시 거리를 원방에서 근방으로 대략 연속적으로 이동시켜 가면서 피검안 (E) 의 굴절력을 측정해 간다. 제어부 (70) 는 굴절력을 구하기 위하여 필요한 촬상 소자 (22) 의 노광 기간 중에 고시표의 정시 거리를 이동시키지 않는 제어 (요컨대, 고시표의 이동을 일단 정지시키는 제어) 를 실시하고 있다.
<단계 S107>
제어부 (70) 는, 단계 S106 에서 취득한 촬상 소자 (22) 의 출력 신호에 기초하여, 해당하는 고시표의 정시 거리에 있어서의 피검안 (E) 의 굴절력을 구한다. 가산 처리를 실시하지 않는 것 이외에는, 굴절력의 측정은 타각 원용 굴절력 측정 모드와 동일한 방법으로 실시된다.
<단계 S108>
제어부 (70) 는, 고시표의 정시 위치 정보와 안굴절력의 측정 결과의 편차량에 기초하여, 피검안의 고시표에 대한 추종 상태를 판정한다.
보다 상세하게는, 제어부 (70) 는, 고시표의 정시 거리에 기초하여 구해지는 디옵터치로부터 단계 S107 에서 구한 굴절력 (디옵터치) 을 감산함으로써, 해당하는 고시표의 정시 거리에 있어서의 피검안 (E) 의 추종 평가치 (ΔD) (디옵터치) 를 구한다. 단계 S108 에서는 추종 평가치 (ΔD) 와 소정의 조건 (제 1 조건) 을 비교한다. 추종 평가치 (ΔD) 가 마이너스 1 디옵터보다 큰 경우에는 단계 S110 로 진행된다. 추종 평가치 (ΔD) 가 마이너스 1 디옵터 이하인 경우에는 단계 S109 로 진행된다. 또한, 본 실시형태에서는 이동시킨 고시표의 정시 거리에 대해 피검안의 조절 추종성이 양호한 경우, 추종 평가치 (ΔD) 는 마이너스 1 디옵터보다 큰 값 (예를 들어 마이너스 0.5 디옵터) 을 취한다. 또, 피검안의 추종성이 나쁠수록 추종 평가치 (ΔD) 는 작은 값 (예를 들어 마이너스 2.0 디옵터) 을 취한다.
<단계 S109>
제어부 (70) 는, 단계 S108 과 마찬가지로 하여 추종 평가치 (ΔD) 와 소정의 조건을 비교한다. 단 비교하는 조건은 단계 S109 와는 상이한 제 2 조건이 된다. 추종 평가치 (ΔD) 가 마이너스 1.75 디옵터보다 큰 경우에는 단계 S111 로 진행되고, 추종 평가치 (ΔD) 가 마이너스 1.75 디옵터 이하인 경우에는 단계 S112 로 진행된다.
<단계 S110, S111>
제어부 (70) 는, 상기 서술한 추종 상태의 판정 결과에 기초하여, 고시표의 제어량을 변경한다. 제어부 (70) 는, 또한 고시표의 정시 위치 정보와, 그 정시 거리에 있어서의 안굴절력의 측정 결과에 기초하여 고시표의 이동 제어를 변경한다.
보다 상세하게는, 제어부 (70) 는, 단계 S108, 단계 S109 에서 판정한 결과에 기초하여 고시표의 정시 거리를 이동시킨다. 현재의 고시표의 정시 거리에 대해 단계 S110 에서는 근방으로 2 단계 이동시킨다. 단계 S111 에서는 근방으로 1 단계 이동시킨다. 또한, 본 실시형태에서는 고시표의 정시 거리를 1 단계 이동시키도록 구동부 (37) 에 제어를 실시하면, 고시표의 정시 거리는 디옵터로 환산하면 0.05 디옵터 떨어진 거리로 이동한다. 또한, 제어부 (70) 는 고시표가 이동 중인지의 여부를, 구동부 (37) 에 대해 제어를 실시한 타이밍으로부터 소정의 경과 시간이 도달하였는지의 여부로 판단한다. 또한, 고시표가 이동 중인지의 여부의 판단은 이것에 한정되는 것은 아니다. 제 2 고시표판 (32b) 이 이동하는 지점에 이동량을 검출하는 검출 수단을 설치해도 된다.
이상과 같이, 제어부 (70) 는, 고시표의 정시 거리에 기초하는 디옵터치와, 당해 정시 거리에 있어서 측정한 피검안 (E) 의 굴절력으로부터 피검안 (E) 의 조절 추종 상태를 구함으로써, 고시표의 정시 거리를 변화시키기 위한 제어에 반영한다. 요컨대, 고시표의 정시 거리가 원방 (원점 부근) 에서 근방을 향하여 이동하면, 피검안 (E) 의 조절력의 한계가 서서히 나타난다. 그 결과 피검안 (E) 의 고시표의 추종성이 나빠진다 (고시표의 정시 거리로부터 오는 디옵터치와 피검안 (E) 의 굴절력을 측정한 디옵터치의 차분이 증가되어 간다).
제어부 (70) 는, 피검안 (E) 의 조절 추종 상태를, 고시표의 정시 거리와 측정한 굴절력으로부터 검지한다. 제어부 (70) 는, 피검안 (E) 의 조절력의 한계보다 빨리 피검사자가 조절을 포기하지 않도록, 검지한 조절 추종 상태에 기초하여 고시표의 이동을 제어한다. 예를 들어, 제어부 (70) 는, 피검안 (E) 의 조절 추종 상태가 양호할 때에는 고시표의 정시 거리를 크게 (빨리) 이동시킨다. 제어부 (70) 는, 피검안 (E) 의 조절 추종 상태가 악화되어 갈 (혹은 조절력의 한계가 가까워져 올) 때, 고시표의 정시 거리의 이동을 작게, 또는 피검안 (E) 의 조절 추종을 기다리는 형태로 제어한다. 따라서, 피검안 (E) 의 조절 추종성을 확보하면서, 짧은 소요 시간에 피검안 (E) 의 조절력을 측정할 수 있다.
또한, 본 실시형태에서는 단계 S109 에서 추종 평가치 (ΔD) 가 마이너스 1.75 디옵터 이하 (제 2 조건) 인 경우에는 단계 S112 로 진행되어 고시표의 정시 위치를 정지시킨 채로 하고 있다. 여기서, 단계 S109 에서 비교 결과 NO 로 판정되어 단계 S112 로 진행되는 구간에 추종 평가치 (ΔD) 를 추가로 판정하는 제 3 조건을 형성해도 된다. 제 3 조건으로서 예를 들어, 추종 평가치 (ΔD) 가 마이너스 2 디옵터보다 작은 경우에는 고시표의 정시 위치를 원방으로 1 단계 이동시키고, 추종 평가치 (ΔD) 가 마이너스 2 디옵터 이상인 경우에는 단계 S112 로 진행시킨다. 이와 같이, 검지한 조절 추종 상태에 관하여, 피검안 (E) 의 조절 추종이 분명하게 나쁠 때에는, 제어부 (70) 는, 고시표의 정시 거리를 이동해 온 방향과는 역방향으로 되돌리고, 피검안 (E) 의 조절 추종을 촉진시키도록 제어를 실시해도 된다.
또한, 본 실시형태에서는, 피검안 (E) 의 조절 추종 상태에 기초하여 고시표의 정시 거리를 변화시킬 때에는, 제어부 (70) 는, 고시표를 일정한 속도로, 이동 거리만 변화시키고 있다. 고시표의 이동 속도에 의해서도 피검안 (E) 의 조절 추종성은 변화하기 때문에, 제어부 (70) 는 검지한 피검안 (E) 의 조절 추종 상태에 기초하여 고시표의 정시 거리의 이동 속도를 변화시켜도 된다. 본 실시형태에서는 조절 측정 중의 1 사이클 (S106 ∼ S113) 은 약 83 ms 이고, 1 사이클 중 약 40 % 는 촬상 소자 (22) 의 수광 기간이 된다. 또, 조절력의 측정 중에는 상기 서술한 1 사이클을 측정 완료까지 연속하여 실시한다. 따라서 본 실시형태에서는 제어부 (70) 는 고시표의 이동 속도를 변화시키지 않고, 이동 거리만을 변화시키도록 제어를 실시하고 있지만, 1 사이클로 보면 이동 거리를 변화시키는 것과 이동 속도를 변화시키는 것은 거의 다름이 없는 제어가 되고 있다.
<단계 S112>
제어부 (70) 는 모니터 (7) 에 측정한 직근 조절력 (Da) 을 표시하고, 또한, 굴절력 변화 그래프 (GLPa), 고시표 환산 그래프 (GLPb) 를 묘화한다. 또한, 직근 조절력 (Da) 은 굴절력 최소치 (Dh) 로부터 고시표 환산치 (Dp) 를 감산한 값 (디옵터) 이 된다. 굴절력 변화 그래프 (GLPa) 는 조절력 측정 중의 직근 조절력 (Da) 의 변화를 나타낸 그래프이다. 고시표 환산 그래프 (GLPb) 는 조절력 측정 중의 고시표의 정시 거리의 변화를 나타낸 그래프이다. 또한, 굴절력 변화 그래프 (GLPa) 와 고시표 환산 그래프 (GLPb) 의 횡축의 단위는 시간 (초) 이고, 종축의 단위는 디옵터 (디옵터치) 를 나타낸다. 제어부 (70) 는 조절력 측정의 개시부터의 경과 시간에 상당하는 횡축의 위치에 묘화를 실시한다. 요컨대, 본 실시형태에서는 굴절력 변화 그래프 (GLPa) 및 고시표 환산 그래프 (GLPb) 는 측정 개시부터 1 사이클 (단계 S106 ∼ 단계 S113) 이 경과할 때마다 갱신되고, 측정 개시부터 측정 완료까지 그래프의 묘화가 우측으로 신장되어 간다.
또한, 굴절력 변화 그래프 (GLPa) 및 고시표 환산 그래프 (GLPb) 는, 피검안 (E) 의 전안부를 관찰하는 조절력 측정 모드의 화면에, 전안부 이미지 (F) 에 수퍼임포즈시키는 형태로 표시시킨다. 또, 전안부 이미지 (F) 의 시인성을 저해하지 않도록, 모니터 (7) 의 표시 영역 전체에 표시되는 전안부 이미지 (F) 에 대해, 모니터 (7) 의 표시 영역 전체의 20 % 이하가 되는 영역을 사용하고, 모니터 (7) 의 표시 영역의 우측 아래의 위치에 배치시킨다. 이와 같이 배치시킴으로써, 굴절력 변화 그래프 (GLPa) 및 고시표 환산 그래프 (GLPb) 는, 모니터 (7) 에 표시되는 피검안 (E) 의 동공의 영역뿐만 아니라 홍채의 영역에도 잘 겹치지 않게 된다. 따라서, 검사자는 피검안의 전안부 이미지를 바람직하게 관찰하면서 조절력 측정의 진행 상태 (고시표의 정시 거리에 대한 피검안 (E) 의 굴절력의 추종 상태) 를 확인하는 것이 가능해진다. 또한, 본 실시형태의 측정에서는 굴절력 변화 그래프 (GLPa) 및 고시표 환산 그래프 (GLPb) 의 갱신 (묘화의 추가) 은, 모니터 (7) 의 해상도에 대응하기 위하여 소정의 경과 시간 (예를 들어 2 사이클에 1 회) 으로 실시한다. 또, 후술하는 바와 같이 굴절력 변화 그래프 (GLPa) 는 묘화한 영역 내에 있어서 수직 방향에서 색이 변화한다.
<단계 S113>
제어부 (70) 는, 또한 각 정시 위치에서의 피검안의 안굴절력을 메모리 (74) 에 관련지어 기억한다. 여기서, 메모리 (74) 는 측정 중의 굴절력의 최대치 또는 최소치를 유지하는 유지 수단 (피크 홀드 수단) 도 겸한다. 측정 중에 메모리 (74) 에 유지 (기억) 되어 있는 최대치 또는 최소치를 초과하는 굴절력의 취득이 있는 경우, 제어부 (70) 는 메모리 (74) 의 소정의 번지에 유지하고 있는 최대치 또는 최소치의 갱신을 실시한다. 이와 같이, 제어부 (70) 는 조절력의 측정을 종료시킬지 여부의 판정을 실시하고, 그 판정 결과에 기초하여 고시표의 이동을 종료한다. 예를 들어, 소정의 조건으로서, 측정 개시부터의 경과 시간이 30 초를 초과하였을 때, 또는 조절력 측정 중의 굴절력의 최대치가 6 초 이상 변화되고 있지 않을 때, 또는 고시표를 정지시키고 있는 시간이 6 초를 초과할 때에 소정에 조건을 만족한 것으로 판정하여 조절력의 측정을 완료한다. 소정의 조건을 만족하고 있지 않은 경우, 조절력의 측정을 계속시키도록 단계 S106 로 옮긴다.
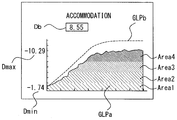
또한, 측정 완료의 조건을 만족한 경우에는, 조절력 측정의 결과를 확인할 수 있는 화면으로 천이 가능해지는 도안 (아이콘) 을 모니터 (7) 에 표시한다. 도 9 는 검사자가 조절력 측정의 결과를 확인하기 위하여 스위치부 (8) 의 도시하지 않은 조절력 결과 표시 스위치를 누른 경우에 표시되는 화면이다. 조절력 결과 화면에서는 측정 결과가 되는 피검안 (E) 의 조절력 (Db), 조절력 측정 중에 측정한 굴절력의 최대치에 기초하는 근점치 (Dmax), 조절력 측정 중에 측정한 굴절력의 최소치에 기초하는 원점치 (Dmin), 굴절력 변화 그래프 (GLPa), 고시표 환산 그래프 (GLPb) 를 표시시킨다. 또한, 굴절력 변화 그래프 (GLPa) 는 수직 방향을 향하여 색을 변화시켜 묘화한다. Area1 의 영역은 수색 (水色), Area2 의 영역은 녹색, Area3 의 영역은 황색, Area4 의 영역은 오렌지색으로 표시된다. 또한, Area1 에서 Area4 에 걸쳐 각각의 영역이 접하는 근방 경계는 중간색을 사용하여 표시한다. 이와 같이 수직 방향으로 신장하는 그래프의 색을 바꿈으로써, 검사자는 조절력 측정 중의 피검안 (E) 의 추종 상태의 변화를 파악하기 쉽고, 조절력 결과 화면에 있어서도 최대 조절력을 포착하기 쉬워진다.
또한, 본 실시형태에서는, 제어부 (70) 는, 고시표의 정시 위치가 원방에서 근방으로 이동될 때의 각 정시 위치에서의 피검안의 안굴절력에 있어서의 최대치와 최소치에 기초하여 피검안의 조절력 (Db) 을 산출하게 되어 있다. 이로써, 조절력의 측정성을 향상시킬 수 있다.
또, 조절력 결과 화면이 표시되어 있는 상태에서 검사자가 스위치부 (8) 에 형성된 도시되지 않은 인쇄 스위치를 조작하면 제어부 (70) 는 프린터 (78) 를 제어하여 측정 결과의 인쇄를 실시한다. 도 10 은 서멀 프린터를 사용한 경우의 인쇄예를 나타낸다. 인쇄된 용지에는 타각 원용 굴절력 측정 모드로 측정한 정보 (PRa 및 PRb) 외에, 조절력 측정 모드로 측정한 피검안 (E) 의 조절력 (Db), 조절력 측정 중에 측정한 굴절력의 최대치에 기초하는 근점치 (Dmax), 조절력 측정 중에 측정한 굴절력의 최소치에 기초하는 원점치 (Dmin), 인쇄용 굴절력 변화 그래프 (PRc) 가 측정 결과로서 인쇄된다.
또한, 본 실시형태에서는 조절력 측정 모드의 개시 위치를 타각 원용 굴절력 측정 모드로 측정한 굴절치로부터 구하여 설정했지만 이것에 한정되는 것이 아니다. 스타트 버튼이 눌리면 타각 원용 굴절력 측정 모드와 동일한 제어 내용으로 피검안의 굴절력을 측정하고, 원용 위치를 구하여 고시표를 정시 위치로 이동시켜도 된다.
또한, 이상의 설명에 있어서는, 안저 반사광에 의한 링 패턴 이미지를 취득하는 측정 광학계를 예로 들어 설명했지만, 이것에 한정되는 것은 아니다. 고시표의 정시 거리를 이동시켜, 타각 굴절력 측정에 의해 피검안 (E) 의 조절력을 측정하는 장치이면 본 발명의 적용이 가능하다. 예를 들어, 피검사자안의 파면 수차를 구하기 위하여 피검안 (E) 의 안저 (Ef) 에 스폿 지표를 투광시키고, 그 안저 반사광을 샤크 하트만 센서를 사용하여 검출하는 측정 광학계여도 된다.
또한, 이상의 설명에 있어서는, 모니터링 결과를 사용하여 제어량을 변경하는 경우, 고시표의 정시 위치 정보와, 정시 거리에 있어서의 안굴절력의 측정 결과가 제 1 허용 범위를 만족하지 않는 경우, 제어량을 변경했지만, 이것에 한정되지 않는다.
예를 들어, 제어부 (70) 는, 고시표의 정시 위치가 원방에서 근방으로 이동되는 동안의 안굴절력의 측정 결과의 변화에 기초하여, 고시표의 이동에 대한 피검안의 추종 상태 (예를 들어, 추종 상태가 양호한지 여부) 를 판정하면 된다. 그리고, 제어부 (70) 는, 추종 상태가 나빠진 것으로 판정된 경우, 제어량을 변경하도록 하면 된다.
보다 상세하게는, 제어부 (70) 는, 정시 거리에 있어서의 안굴절력의 측정 결과에 따라, 제어량을 변경하도록 해도 된다. 상세하게는, 예를 들어, 단위 시간당의 안굴절력의 변화량이 감소한 경우, 고시표에 대한 피검안의 추종성에 변화가 있는 것으로 생각된다. 그래서, 단위 시간당의 안굴절력의 변화량에 따라, 제어부 (70) 는, 제어량 (예를 들어, 고시표의 이동 속도, 또는 각 단계에 있어서의 고시표의 이동량) 을 변경하도록 해도 된다. 이로써, 검사자는, 고시표의 추종이 가능해진다. 따라서, 본래의 조절력을 순조롭게 측정할 수 있다. 또한, 변화량이 증가했을 때에는, 제어량을 증가시킨다. 변화량이 감소했을 때 (또는 변화량이 없어졌을 때) 에는 제어량을 감소시키면 된다.
또, 제어부 (70) 는, 예를 들어, 고시표의 정시 위치에 따라, 제어량을 변경하도록 해도 된다. 예를 들어, 고시표의 정시 거리가, 피검안에 가까워질수록, 조절 부하가 커져, 추종이 어려워진다. 그래서, 고시표의 정시 위치에 따라 제어량 (예를 들어, 고시표의 이동 속도, 또는 각 단계에 있어서의 고시표의 이동량) 을 변경해도 된다. 이로써, 검사자는 고시표의 추종이 가능해진다. 따라서, 본래의 조절력을 순조롭게 측정할 수 있다. 또한, 정시 거리가 피검안으로부터 멀 때에는, 제어량을 크게 하고, 정시 거리가 피검안에 가까울 때에는, 제어량을 적게 하면 된다.
또한, 상기 설명에 있어서는, 고시표의 정시 위치 정보와, 정시 거리에 있어서의 안굴절력의 측정 결과가 허용 범위를 만족하지 않는 경우, 고시표의 이동 방향을 변경, 또는 고시표의 이동을 일단 정지시켰지만, 이것에 한정되지 않는다. 요컨대, 제어부 (70) 는, 고시표의 정시 위치가 원방에서 근방으로 이동되는 동안의 안굴절력의 측정 결과의 변화에 기초하여, 고시표의 이동에 대한 피검안의 추종의 가부를 판정한다. 그리고, 제어부 (70) 는, 피검안이 추종할 수 없는 것으로 판정되었을 때, 고시표의 이동 방향을 변경, 또는 고시표의 이동을 일단 정지시키도록 하면 된다. 예를 들어, 제어부 (70) 는, 단위 시간당의 안굴절력의 변화량이 허용 범위를 만족하는지 여부에 의해 피검안이 고시표를 추종할 수 있는지 여부를 판정한다. 그리고, 제어부 (70) 는 변화량이 허용 범위를 만족하지 않는 것으로 판정되었을 때, 고시표의 이동 방향을 변경, 또는 고시표의 이동을 일단 정지시키도록 하면 된다.
또한, 이상의 설명에 있어서는, 안굴절력의 측정 결과의 변화가 하강으로 전환되고 나서 소정 시간 경과 후에 고시표의 이동을 종료했는데, 이것에 한정되지 않는다. 요컨대, 제어부 (70) 는, 고시표의 정시 위치가 원방에서 근방으로 이동되는 동안의 안굴절력의 측정 결과의 변화에 기초하여, 고시표의 이동에 대한 피검안의 추종의 가부를 판정한다. 그리고, 제어부 (70) 는, 피검안이 추종할 수 없는 상태가 일정 시간 계속되었을 때, 고시표의 이동을 종료하도록 하면 된다. 예를 들어, 제어부 (70) 는, 제어량을 변경했음에도 상관없이, 단위 시간당의 안굴절력의 변화량이 허용 범위를 만족하는지 여부에 의해 피검안이 고시표를 추종할 수 있는지 여부를 판정한다. 그리고, 제어부 (70) 는, 변화량이 허용 범위를 만족하지 않는 상태가 일정 시간 계속되었을 때, 고시표의 이동을 종료하도록 해도 된다.
또한, 이상의 설명에 있어서는, 고시표의 정시 위치가 원방에서 근방으로 이동될 때의 각 정시 위치에서의 피검안의 안굴절력에 기초하여 피검안의 조절력을 측정하는 경우를 예로 하여 제어량의 변경 수법에 대해 설명했는데, 이것에 한정되지 않는다. 예를 들어, 피검안의 근방에서의 안굴절력을 측정할 때에, 원방에서 근방으로 고시표를 이동시키는 경우에 있어서도, 본 실시형태의 기술의 적용은 가능하다.
4 : 측정부
6 : XYZ 구동부
7 : 모니터
8 : 스위치부
10 : 측정 광학계
22 : 촬상 소자
30 : 고시표 정시 광학계
32 : 고시표판
37 : 구동부
50 : 관찰 광학계
52 : 촬상 소자
70 : 제어부
75 : 메모리
77 : 화상 처리부
6 : XYZ 구동부
7 : 모니터
8 : 스위치부
10 : 측정 광학계
22 : 촬상 소자
30 : 고시표 정시 광학계
32 : 고시표판
37 : 구동부
50 : 관찰 광학계
52 : 촬상 소자
70 : 제어부
75 : 메모리
77 : 화상 처리부
Claims (7)
- 피검안의 안저에 측정광을 투광하고, 상기 안저로부터의 반사광에 기초하여 상기 피검안의 안굴절력을 측정하는 측정 수단과,
상기 피검안에 대해 고시표를 정시하는 고시표 정시 수단과,
상기 피검안에 정시되는 상기 고시표의 정시 위치를 이동시키기 위한 구동 수단과,
상기 구동 수단을 제어하여 상기 고시표의 정시 위치를 원방에서 근방으로 이동시키는 제어 수단을 구비하고,
적어도 원방 위치 및 근방 위치에서의 안굴절력을 측정할 수 있는 안굴절력 측정 장치로서,
상기 제어 수단은, 상기 구동 수단을 제어하여, 상기 고시표를 원방에서 근방으로 이동시키는 동안의 안굴절력의 측정 결과의 변화에 기초하여 상기 구동 수단의 제어량을 변경하는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항에 있어서,
상기 제어 수단은, 상기 제어량을 변경시키는 경우, 상기 고시표를 원방에서 근방으로 이동시키는 동안에 상기 고시표의 이동 속도, 또는 상기 고시표를 원방에서 근방에 단계적으로 이동시키는 동안에 각 단계에 있어서의 이동량의 적어도 어느 것을 변경하는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항 또는 제 2 항에 있어서,
상기 측정 수단은, 상기 고시표의 정시 위치가 원방에서 근방으로 이동될 때의 각 정시 위치에서의 상기 피검안의 안굴절력에 기초하여 피검안의 조절력을 측정하는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항 내지 제 3 항 중 어느 한 항에 있어서,
상기 제어 수단은, 또한 상기 고시표의 정시 위치가 원방에서 근방으로 이동되는 동안의 안굴절력의 측정 결과의 변화에 기초하여, 상기 고시표의 이동 방향을 변경, 또는 상기 고시표의 이동을 일단 정지시키는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항 내지 제 4 항 중 어느 한 항에 있어서,
상기 제어 수단은, 또한 상기 고시표의 정시 위치가 원방에서 근방으로 이동되는 동안의 안굴절력의 측정 결과의 변화에 기초하여, 상기 고시표의 이동에 대한 상기 피검안의 추종의 가부를 판정하고, 상기 피검안이 추종할 수 없는 상태가 일정 시간 계속되었을 때, 상기 고시표의 이동을 종료하는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항 내지 제 5 항 중 어느 한 항에 있어서,
상기 제어 수단은, 상기 측정 수단에 의해 피검안의 조절력이 측정되는 경우, 상기 고시표의 초기의 정시 위치를 결정하기 위하여 안굴절력을 측정하는 제 1 굴절력 측정과, 정시 위치를 이동시키면서 안굴절력을 측정하기 위한 제 2 굴절력 측정에서, 안굴절력의 측정 방법을 변경하는 것을 특징으로 하는 안굴절력 측정 장치. - 제 1 항 내지 제 6 항 중 어느 한 항에 있어서,
상기 측정 수단은, 상기 반사광을 축광하는 2 차원 촬상 소자를 구비하고, 상기 고시표가 정지되어 있을 때의 상기 2 차원 촬상 소자의 출력 신호를 사용하여 굴절력을 구하는 것을 특징으로 하는 안굴절력 측정 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013018599A JP2014147570A (ja) | 2013-02-01 | 2013-02-01 | 眼科装置 |
| JPJP-P-2013-018599 | 2013-02-01 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20140099195A true KR20140099195A (ko) | 2014-08-11 |
Family
ID=51258980
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020140009735A KR20140099195A (ko) | 2013-02-01 | 2014-01-27 | 안굴절력 측정 장치 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20140218685A1 (ko) |
| JP (1) | JP2014147570A (ko) |
| KR (1) | KR20140099195A (ko) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016033590A1 (en) | 2014-08-31 | 2016-03-03 | Berestka John | Systems and methods for analyzing the eye |
| CN113940620A (zh) * | 2015-11-13 | 2022-01-18 | 尼德克株式会社 | 主观式检眼装置 |
| IL245879B (en) * | 2016-05-26 | 2021-05-31 | Manela Israel | System and method for eye diagnosis |
| JP7035630B2 (ja) * | 2018-03-02 | 2022-03-15 | 株式会社ニデック | 眼科装置 |
| JP7367509B2 (ja) | 2019-12-13 | 2023-10-24 | 株式会社ニデック | 眼科測定装置、眼科測定システム、および眼科測定プログラム |
| EP4076134A1 (en) | 2019-12-20 | 2022-10-26 | AMO Development, LLC | Optical measurement systems and processes with non-telecentric projection of fixation target to eye |
| US20240108213A1 (en) * | 2022-09-29 | 2024-04-04 | Topcon Corporation | Ophthalmologic apparatus |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS56125032A (en) * | 1980-03-07 | 1981-10-01 | Nippon Chemical Ind | Optometry apparatus |
| JPS60145119A (ja) * | 1983-12-30 | 1985-07-31 | キヤノン株式会社 | 眼屈折力測定装置 |
| JP3068626B2 (ja) * | 1989-09-08 | 2000-07-24 | キヤノン株式会社 | 他覚式眼屈折測定装置 |
| JP2775183B2 (ja) * | 1989-12-19 | 1998-07-16 | 株式会社ニデック | 眼調節力測定装置 |
| JP2001000394A (ja) * | 1999-06-17 | 2001-01-09 | Nikon Corp | 検眼装置 |
| JP2004321363A (ja) * | 2003-04-23 | 2004-11-18 | Nikon Corp | 眼調節力回復装置 |
| JP2005103069A (ja) * | 2003-09-30 | 2005-04-21 | Nidek Co Ltd | 眼調節機能測定装置 |
-
2013
- 2013-02-01 JP JP2013018599A patent/JP2014147570A/ja active Pending
-
2014
- 2014-01-27 KR KR1020140009735A patent/KR20140099195A/ko not_active Application Discontinuation
- 2014-01-30 US US14/168,082 patent/US20140218685A1/en not_active Abandoned
Also Published As
| Publication number | Publication date |
|---|---|
| US20140218685A1 (en) | 2014-08-07 |
| JP2014147570A (ja) | 2014-08-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101280163B1 (ko) | 안굴절력 측정 장치 | |
| KR20140099195A (ko) | 안굴절력 측정 장치 | |
| JP6007466B2 (ja) | 角膜形状測定装置 | |
| JP4492847B2 (ja) | 眼屈折力測定装置 | |
| JP4233426B2 (ja) | 眼屈折力測定装置 | |
| JP6143447B2 (ja) | 眼科装置及び眼測定方法、並びにプログラム | |
| KR20120074232A (ko) | 안굴절력 측정 장치 | |
| KR101647287B1 (ko) | 안과장치 및 안과방법 | |
| KR20140016167A (ko) | 안과장치 및 얼라인먼트 방법 | |
| JP4987408B2 (ja) | 眼科装置 | |
| JP6221247B2 (ja) | 眼科装置 | |
| WO2019111788A1 (ja) | 眼屈折力測定装置 | |
| JP4159190B2 (ja) | 眼科測定装置 | |
| JP7035630B2 (ja) | 眼科装置 | |
| JP5188534B2 (ja) | 眼科装置 | |
| JP4653576B2 (ja) | 眼屈折力測定装置 | |
| JP2008073415A (ja) | 眼科装置 | |
| JP4700785B2 (ja) | 眼科装置 | |
| JP6140947B2 (ja) | 眼科装置及び眼科撮影方法 | |
| JP2011005131A (ja) | 眼屈折力測定装置 | |
| JP4436914B2 (ja) | 眼屈折力測定装置 | |
| JPH09192097A (ja) | 眼科装置 | |
| JP2016120009A (ja) | 眼科装置及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Withdrawal due to no request for examination |