<概要>
典型的な実施形態の1つについて、図面を参照して説明する。図1~図9は、本実施形態に係る眼科装置を説明する図である。なお、以下の<>にて分類された項目は、独立または関連して利用され得る。
例えば、眼科装置は、固視標呈示手段(例えば、固視標呈示光学系300)を備える。固視標呈示手段は、被検眼に対して固視標を呈示する。また、例えば、眼科装置は、測定手段(例えば、測定光学系200)を備える。測定手段は、被検眼の眼底に測定光束を投影する投光光学系(例えば、投影光学系210)と、眼底により反射された測定光束の反射光束を受光する受光光学系(例えば、受光光学系220)と、を有し、被検眼の眼屈折力を他覚的に測定する。例えば、被検眼の眼屈折力は、球面情報(例えば、球面度数、等)や乱視情報(例えば、柱面度数、乱視軸角度、等)であってもよい。なお、本実施例における眼屈折力は、被検眼の少なくとも乱視情報を含む眼屈折力であってもよい。
<設定手段>
例えば、眼科装置は、設定手段(例えば、制御部170)を備える。設定手段は、固視標の呈示距離を設定する。設定手段は、固視標板(例えば、固視標板302)を移動させることによって、固視標板に形成された固視標の呈示距離を設定する構成であってもよい。また、設定手段は、固視標呈示手段の光路内で光学部材を駆動させることによって、固視標の呈示距離を設定する構成であってもよい。一例として、この場合には、固視標呈示手段の光路内で、レンズ、プリズム、ミラー、等の少なくともいずれかの光学部材を挿抜させることによって、固視標の呈示距離が設定されてもよい。
設定手段は、固視標を初期位置から所定の呈示距離となる位置に設定する構成であってもよい。また、設定手段は、固視標の第1呈示距離と、第1呈示距離とは異なる第2呈示距離と、を設定する構成であってもよい。この場合、第1呈示距離は、第2呈示距離よりも長い距離であってもよい。例えば、固視標の第1呈示距離は被検眼の遠方距離であり、固視標の第2呈示距離は被検眼の近方距離であってもよい。もちろん、第1呈示距離が遠方距離、第2呈示距離が中間距離であってもよいし、第1呈示距離が中間距離、第2呈示距離が近方距離であってもよい。なお、第1呈示距離が第2呈示距離よりも長い距離であれば、第1呈示距離と第2呈示距離がともに近方距離(例えば、第1呈示距離が30cm、第2呈示距離が15cm、等)に設定されてもよい。また、この場合、第1呈示距離は、第2呈示距離よりも短い距離であってもよい。例えば、第1呈示距離が近方距離、第2呈示距離が遠方距離であってもよいし、第1呈示距離が近方距離、第2呈示距離が中間距離であってもよいし、第1呈示距離が中間距離、第2呈示距離が遠方距離、等であってもよい。もちろん、第1呈示距離が第2呈示距離よりも短い距離であれば、第1呈示距離と第2呈示距離がともに近方距離等に設定されてもよい。
<取得手段>
例えば、眼科装置は、取得手段(例えば、制御部170)を備える。取得手段は、設定手段により呈示距離が設定された後、眼屈折力の変化が安定した状態において、眼屈折力を取得する。なお、前述の設定手段により固視標の第1呈示距離と第2呈示距離とが設定された場合、取得手段は、第1呈示距離における第1眼屈折力と、第2呈示距離における第2眼屈折力と、を取得し、第1眼屈折力及び前記第2眼屈折力の少なくともいずれかは、眼屈折力の変化が安定した状態における眼屈折力が取得される構成としてもよい。
被検眼は、固視標が初期位置から所定の呈示距離となる位置、あるいは、第1呈示距離から第2呈示距離となる位置に設定されると、移動した固視標にピントを合わせようとする。このとき、被検眼のピントは時間の経過とともに徐々に合わせられ、被検眼の眼屈折力は時間の経過とともに徐々に安定する傾向がある。特に、固視標が短い呈示距離にて被検眼に投影された場合は、ピントを合わせるまでに時間がかかり、被検眼の眼屈折力が不安定になりやすい傾向がある。このため、本実施例における眼科装置は、眼屈折力の変化が安定した状態において、眼屈折力を取得する。
例えば、取得手段は、眼屈折力の変化が安定した状態を、所定の待機時間(例えば、1秒等)が経過したタイミングとして、眼屈折力を取得してもよい。この場合、所定の待機時間は、呈示距離が設定されてから眼屈折力の変化が安定するまでに要する時間を、予め実験やシミュレーションから求めておくことで決定してもよい。
また、例えば、取得手段は、眼屈折力の変化が安定した状態か否かを判定する判定手段(例えば、制御部170)を有し、判定手段の判定結果に基づいて、眼屈折力を取得してもよい。この場合、取得手段は眼屈折力のゆらぎを検出し、ゆらぎが所定の閾値以下となった状態を眼屈折力の変化が安定した状態として、眼屈折力を取得してもよい。例えば、眼屈折力のゆらぎは、単位時間内における複数の測定結果の標準偏差、単位時間内における複数の測定結果の最大値と最小値の差、変動する測定結果の周波数、等の少なくともいずれかを採用することができる。例えば、所定の閾値は、予め実験やシミュレーションにより設定しておいてもよいし、検者が任意の閾値を設定してもよい。このような構成であることによって、検者は、被検眼の眼屈折力の変化が安定したことを容易に把握できる。また、検者は、固視標を近方距離に設定した場合であっても、近方距離での眼屈折力の変化が安定した状態において、眼屈折力を取得することができる。このため、より精度高く眼屈折力を取得することができるようになる。なお、本実施例では、取得手段が判定手段を有する構成を例に挙げているが、取得手段と判定手段とが別々に設けられる構成であってもよい。
例えば、取得手段は、所定の待機時間が経過したタイミング、あるいは、判定結果に基づいたタイミングでの測定を行うことにより、眼屈折力の変化が安定した状態の眼屈折力を取得してもよい。また、取得手段は、被検眼の眼屈折力をリアルタイムに測定してモニタリングすることで、眼屈折力の変化が安定した状態の眼屈折力を取得してもよい。この場合には、眼屈折力をリアルタイムに測定した結果から、眼屈折力と時間の関係を表すグラフ(例えば、近似曲線データ600)が示されてもよい。例えば、検者がグラフから眼屈折力の変化が安定した状態を判断し、任意のタイミングにおける測定結果を選択することで、眼屈折力の変化が安定した状態の眼屈折力が取得されてもよい。
例えば、このような構成であることによって、検者は、固視標を近方距離に設定した場合であっても、近方距離での眼屈折力の変化が安定した状態において、第1眼屈折力を取得することができる。このため、被検眼の近方距離での他覚的な眼屈折力を精度よく取得することができる。
なお、例えば、本実施例における眼科装置は、被検眼と測定手段のアライメント状態を検出する検出手段(例えば、制御部170)を備えていてもよい。この場合、取得手段は、検出手段の検出結果に基づいて、眼屈折力の変化が安定した状態における眼屈折力を取得するための制御を開始する構成であってもよい。一例として、取得手段は、被検眼と測定手段とのアライメントが許容範囲内におさまった状態を検出すると、所定の待機時間のカウントを開始してもよい。また、一例として、取得手段は、アライメントが許容範囲内におさまった状態を検出すると、眼屈折力の変化が安定した状態か否かを判定するための判定処理を開始してもよい。すなわち、本実施例では、被検眼と測定手段とがアライメント(位置合わせ)された状態であり、かつ眼屈折力の変化が安定した状態において、取得手段により眼屈折力が取得されてもよい。
<出力手段>
例えば、眼科装置は、出力手段(例えば、制御部170)を備える。出力手段は、取得手段が取得した眼屈折力を出力する。例えば、出力手段が、眼屈折力の変化が安定した状態において取得された眼屈折力を出力することによって、検者は、被検眼の他覚的な眼屈折力を精度よく取得することができる。なお、前述の取得手段により、第1呈示距離における第1眼屈折力と、第2呈示距離における第2眼屈折力とが取得された場合、出力手段は、第1眼屈折力及び第2眼屈折力を比較可能に出力する構成としてもよい。一例としては、第1眼屈折力及び第2眼屈折力が、表示手段(例えば、モニタ107)に表示される構成、プリンタ等で印刷する構成、外部メモリへ保存される構成、別の装置へ送信する構成、等の少なくともいずれかの構成であることによって、比較可能に出力されてもよい。これによって、検者は、第1眼屈折力と第2眼屈折力との測定結果にずれがあるかどうかを容易に判断することができる。
なお、出力手段は、第1眼屈折力と第2眼屈折力との差分を演算して出力するようにしてもよい。このような差分は、第1眼屈折力及び第2眼屈折力とともに出力されてもよいし、差分のみが出力されてもよい。すなわち、出力手段は、第1眼屈折力及び第2眼屈折力と、第1眼屈折力と第2眼屈折力との差分と、の少なくともいずれかが表示される構成であってもよい。これによって、検者は、第1眼屈折力と第2眼屈折力との測定結果にどの程度のずれがあるかを容易に確認することができる。
なお、本実施例における眼科装置は、報知情報出力手段(例えば、制御部170)を備えていてもよい。報知情報出力手段は、第1眼屈折力から第2眼屈折力への変化を報知するための報知情報を出力する。例えば、報知情報は、第1眼屈折力から第2眼屈折力への変化がみられたことを示す情報、第1眼屈折力から第2眼屈折力への変化がみられないことを示す情報、等の少なくともいずれかであってもよい。例えば、報知情報出力手段は、表示手段にメッセージを表示することによって、報知情報を出力してもよい。また、例えば、報知情報出力手段は、音声ガイドを発することによって、報知情報を出力してもよい。なお、報知情報は、前述の被検眼の眼屈折力とともに、外部メモリへ保存される構成、別の装置へ送信する構成、等としてもよい。これによって、検者は、被検眼の眼屈折力の状態を容易に把握することができる。
例えば、本実施例では、報知情報出力手段が、第1眼屈折力から第2眼屈折力への変化がみられないことを示す報知情報を出力する。このような報知情報は、所定の眼屈折力が基準値として設定され、この基準値に第2眼屈折力が到達しなかった場合に、出力されてもよい。なお、基準値は、第1眼屈折力に基づいて設定されてもよいし、第2眼屈折力に基づいて設定されてもよい。また、基準値は絶対的な値である必要は必ずしもなく、許容範囲が設けられていてもよい。例えば、このような報知情報が出力されることによって、検者は、被検眼の眼屈折力が、第1眼屈折力から第2眼屈折力に変化しなかったことを容易に知ることができる。
なお、眼科装置は、本実施例にて例示した構成とは異なる構成をもつ眼科装置であってもよい。一例としては、被検眼の左眼及び右眼の双方の眼底に測定光束を投影し、両眼開放状態にて被検眼の眼屈折力を他覚的に測定する測定手段を有し、両眼開放状態において呈示距離を設定する設定手段と、両眼開放状態において呈示距離が設定された後に、眼屈折力の変化が安定した状態の眼屈折力を取得する取得手段と、取得手段が両眼開放状態において取得した眼屈折力を出力する出力手段と、を備えるような眼科装置に、本実施例にて例示した技術の少なくとも一部を適用してもよい。このような場合、検者は、固視標の呈示距離を設定したことによる被検眼の輻輳状態を考慮した測定結果を取得することができる。
<実施例>
以下、眼科装置について説明する。本実施例では、眼科装置の左右方向をX方向、上下方向をY方向、前後方向をZ方向として表す。
図1は眼科装置100の外観構成図である。例えば、眼科装置100は、基台101、顔支持ユニット102、移動台103、測定部104、ジョイスティック105、駆動部106、モニタ(ディスプレイ)107、スイッチ部108、等が設けられている。顔支持ユニット102は、基台101に固設され、被検者の顔を支持する。移動台103は、基台101に対してX方向及びZ方向に移動可能である。移動台103には、各種の情報(例えば、被検眼Eの観察像、被検眼Eの測定結果、等)を表示するモニタ107、各種の設定を行うためのスイッチ部108、等が設けられている。測定部104は、後述する光学系を収納する。駆動部106は、移動台103に対してY方向に移動可能である。
ジョイスティック105には、被検眼Eに対して測定部104を相対的に移動させる移動機構が設けられている。例えば、本実施例では、このような移動機構として、移動台103を基台101上でXZ方向に摺動させるための図示なき摺動機構が設けられている。検者がジョイスティック105を操作すると、移動台103が基台101上をXZ方向に摺動する。また、ジョイスティック105には、駆動部106をY方向へ移動させるための回転ノブ105aが設けられている。検者がジョイスティック105の回転ノブ105aを操作すると、駆動部106がY方向へ移動するとともに、測定部104もY方向へ移動する。これによって、被検眼Eに対して測定部104を移動させることができる。
なお、上記では、駆動部106の移動にともなって測定部104をY方向へ移動させる構成を例に挙げているが、これに限定されない。例えば、測定部104には、測定部104をX方向、Y方向、及びZ方向に移動可能とする移動機構を設けてもよい。このような構成である場合には、測定部104に設けられた移動機構が、被検眼Eに対して測定部104を微動させる際に用いられ、移動台103に設けられた摺動機構が、被検眼Eに対して測定部104を粗動させる際に用いられてもよい。
図2は眼科装置100の光学系及び制御系の概略構成図である。例えば、測定部104は、測定光学系200、固視標呈示光学系300、指標投影光学系400、観察光学系500、等を備える。測定光学系200は、被検眼Eの眼屈折力(例えば、球面度数、柱面度数、乱視軸角度、等)を他覚的に測定する。固視標呈示光学系300は、被検眼Eに対して固視標を呈示する。指標投影光学系400は、被検眼EのZ方向を検出するためのアライメント指標を投影する。観察光学系500は、被検眼Eの前眼部を撮像する。
<測定光学系>
例えば、測定光学系200は、投影光学系(投光光学系)210と、受光光学系220と、を備える。投影光学系210は、被検眼Eにおける瞳孔Pの中心部を介して、被検眼Eの眼底Efにスポット状の測定光束を投影する。受光光学系220は、眼底Efにより反射された測定光束の反射光束を、瞳孔Pの周辺部を介してリング状に取り出す。
例えば、投影光学系210は、光源211、リレーレンズ212、ホールミラー213、プリズム214、駆動部215、対物レンズ216、等を備える。光源11は、測定光学系200の光軸N1上に配置され、眼底Efと光学的に共役な位置関係となっている。例えば、光源211としては、LED(Light Emitting Diode)、SLD(Superluminescent Diode)、等を用いることができる。ホールミラー213の開口部は、瞳孔Pと光学的に共役な位置関係となっている。プリズム214は瞳孔Pと共役な位置から外れた位置に配置され、プリズム214を通過する光束を光軸N1に対して偏心させる。なお、プリズム214に代えて、光軸N1上に平行平面板を斜めに配置してもよい。駆動部215は、光軸N1を中心として、プリズム214を回転駆動させる。
例えば、受光光学系220は、対物レンズ216、プリズム214、ホールミラー213、リレーレンズ221、全反射ミラー222、受光絞り223、コリメータレンズ224、リングレンズ225、撮像素子226、等を備える。対物レンズ216、プリズム214、及びホールミラー213は、投影光学系210と共用される。リレーレンズ221及び全反射ミラー222は、ホールミラー213の反射方向に配置される。受光絞り223、コリメータレンズ224、リングレンズ225、及び撮像素子226は、全反射ミラー222の反射方向に配置される。受光絞り223は、眼底Efと光学的に共役な位置関係となっている。リングレンズ225は、瞳孔Pと光学的に共役な位置関係となっている。例えば、リングレンズ225は、円筒レンズがリング状に形成されたレンズ部と、レンズ部以外に遮光用のコーティングが施された遮光部と、から構成される。撮像素子226は、眼底Efと光学的に共役な位置関係となっている。例えば、撮像素子226としては、CCD(Charged-Coupled Devices)、CMOS(Complementary Metal-Oxide-Semiconductor)、等を用いることができる。例えば、撮像素子226からの出力信号は、画像処理部171を介して、制御部170に入力される。
なお、被検眼Eと対物レンズ216との間には、ビームスプリッタ230が配置されている。ビームスプリッタ230は、固視標呈示光学系300からの測定光束を被検眼Eへと導き、被検眼Eの前眼部からの反射光束を観察光学系500へと導く。
上記の構成において、光源211から出射された測定光束は、リレーレンズ212、ホールミラー213、プリズム214、対物レンズ216、及びビームスプリッタ230を経て、眼底Ef上にスポット状の測定光束を投影する。これによって、眼底Ef上に点光源像が形成される。このとき、プリズム214が光軸N1周りに回転され、ホールミラー213の開口部の瞳投影像(瞳上での投影光束)は高速に偏心回転される。眼底Efにて測定光束が反射された反射光束は、ビームスプリッタ230、対物レンズ216、及びプリズム214を介して、ホールミラー213に反射される。反射光束は、さらに、リレーレンズ221を介して全反射ミラー222に反射され、受光絞り223の位置に集光する。コリメータレンズ224及びリングレンズ225によって、リング状の像が撮像素子226に結像する。
なお、測定光学系200は上記の構成に限らず、被検眼Eの眼底Efに測定光束を投影する投光光学系と、眼底Efにより反射された測定光束の反射光束を受光する受光光学系と、を有する測定光学系であればよい。例えば、測定光学系200は、眼底Efにスポット指標を投影し、シャックハルトマンセンサを用いて、眼底Efにおけるスポット指標の反射光束を検出する測定光学系であってもよい。
<固視標呈示光学系>
例えば、固視標呈示光学系300は、光源301、固視標板302、投光レンズ303、駆動部304、ハーフミラー305、対物レンズ306、駆動部307、等を備える。光源301は、ビームスプリッタ230により光軸N1と同軸にされた光軸N2上に配置される。固視標板302は、第1固視標板302aと、第2固視標板302bと、を備える。第1固視標板302aは、被検眼Eの他覚眼屈折力を測定する際に用いる。第2固視標板302bは、被検眼Eの調節力を測定する際に用いる。駆動部304は、第1固視標板302aと第2固視標板302bとを切り替える。駆動部307は、固視標板302の位置を光軸N2方向へ移動させることによって、被検眼Eに呈示する固視標の呈示位置を移動させることができる。また、駆動部307は、光源301及び固視標板302を光軸N2方向へ移動させることで、被検眼Eに雲霧をかけることができる。例えば、駆動部307としては、アクチュエータ(例えば、ステッピングモータ等)と、基準位置となるフォトインタラプタと、が併用されてもよい。
<指標投影光学系>
指標投影光学系400は、第1指標投影光学系と、第2指標投影光学系と、を備える。第1指標投影光学系は、被検眼Eの角膜に無限遠のアライメント指標を投影する。第2指標投影光学系は、被検眼Eの角膜に有限遠のアライメント指標を投影する。
例えば、第1指標投影光学系は、点光源401a及び401b、コリメータレンズ402a及び402b、等を有する。なお、便宜上、図2では第1指標投影光学系の一部のみを図示している。点光源401a及び401bは、近赤外光を発する光源であってもよい。コリメータレンズ402a及び402bは、点光源から発せられた光束を平行光束(略平行光束)にする。これらの点光源及びコリメータレンズは、光軸N1を中心とした同心円上に45度間隔で複数個が配置され、光軸N1を通る垂直平面を挟んで左右対称となっている。これによって、被検眼Eの角膜に無限遠のアライメント指標が投影される。
例えば、第2指標投影光学系は、点光源403a及び403bを有する。なお、便宜上、図2では第2指標投影光学系の一部のみを図示している。点光源403a及び403bは、近赤外光を発する光源であってもよい。例えば、これらの点光源は、第1指標投影光学系が有する点光源とは異なる位置に6個配置される。これによって、被検眼Eに有限遠のアライメント指標が投影される。
なお、本実施例においては、第1指標投影光学系及び第2指標投影光学系の光源として点状の光源を用いる構成を例に挙げて説明したがこれに限定されない。例えば、光源はリング状の光源やライン状の光源を用いるようにしてもよい。また、第2指標投影光学系は、被検眼Eの前眼部を照明する前眼部照明、被検眼Eの角膜形状を測定する指標、等としても用いることができる。
<観察光学系>
例えば、観察光学系500は、対物レンズ306、ハーフミラー305、撮像レンズ501、撮像素子502、等を備える。対物レンズ306及びハーフミラー305は、固視標呈示光学系300と共用される。撮像レンズ501及び撮像素子502は、ハーフミラー305の反射方向に配置される。撮像素子502は、被検眼Eの前眼部と光学的に共役な位置関係となっている。例えば、撮像素子502からの出力は、画像処理部172を介して、制御部170及びモニタ107に入力される。なお、観察光学系500は、指標投影光学系400によって被検眼Eの角膜に形成されたアライメント指標像を検出する光学系を兼ね、画像処理部172及び制御部170によってアライメント指標像の位置を検出する。
<制御部>
例えば、制御部170は、CPU(プロセッサ)、RAM、ROM、等を備える。CPUは、眼科装置100における各部の駆動を制御する。RAMは、各種の情報を一時的に記憶する。ROMには、CPUが実行する各種プログラム等が記憶されている。なお、制御部170は、複数の制御部(つまり、複数のプロセッサ)によって構成されてもよい。
制御部170には、駆動部106、モニタ107、スイッチ部108、画像処理部172、不揮発性メモリ175(以下、メモリ175)、等が電気的に接続される。また、制御部170には、測定部104が備える各光源、各撮像素子、各駆動部、等が電気的に接続される。
メモリ175は、電源の供給が遮断されても記憶内容を保持できる非一過性の記憶媒体である。例えば、メモリ175としては、ハードディスクドライブ、フラッシュROM、着脱可能なUSBメモリ、等を用いることができる。メモリ175には、被検眼Eの第1眼屈折力、被検眼Eの第2眼屈折力、演算された眼屈折力の差分、等を記憶してもよい。
<制御動作>
以下、被検眼Eの眼屈折力を取得し、これを出力する手順について、眼科装置100の制御動作とともに説明する。本実施例では、被検眼Eに対する固視標の呈示距離が遠方距離と近方距離にそれぞれ設定され、被検眼Eの遠方距離における眼屈折力(すなわち、後述する第1眼屈折力)が取得された後に、被検眼Eの近方距離における眼屈折力(すなわち、後述する第2眼屈折力)が取得される場合を例に挙げる。
例えば、検者は、スイッチ部108を操作して、被検眼Eの遠方距離における第1眼屈折力を測定するための遠方視モードを設定する。制御部170は、固視標呈示光学系300が備える駆動部304を駆動して、固視標板302を第1固視標板302aに切り替える。また、制御部170は、固視標呈示光学系300が備える駆動部307を駆動して、被検眼Eから第1固視標板302aまでの距離(すなわち、呈示距離)が第1呈示距離となるように、第1固視標板302aを所定の遠方位置に移動させる。例えば、所定の遠方位置は、第1呈示距離が光学的に5mとなる位置であってもよい。これによって、被検眼Eを遠方視状態とすることができる。また、例えば、制御部170は、指標投影光学系400が備える点光源を点灯させる。これによって、被検眼Eの角膜にアライメント指標像が投影されるようになる。
<被検眼のアライメント>
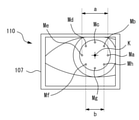
図3は被検眼Eの前眼部画像110の一例である。検者は被検者に、顔支持ユニット102に顔を固定し、第1固視標板302aに形成された固視標を観察するよう指示する。被検眼Eの前眼部には、アライメント指標像Ma~Mhが投影される。なお、例えば、アライメント指標像Ma及びMeは無限遠であり、アライメント指標像Mh及びMfは有限遠である。また、被検眼Eの前眼部は、観察光学系500が備える撮像素子502により検出され、前眼部画像110がモニタ107に表示される。
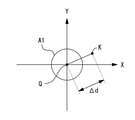
図4はアライメント制御を説明する図である。例えば、制御部170は、アライメント指標像の中心位置を被検眼Eの角膜頂点位置(略角膜頂点位置)Kとして算出し、予め設定されたアライメント基準位置Qとの偏位量Δdを求めることにより、X方向及びY方向の位置ずれを検出する。本実施例では、アライメント基準位置Qが、被検眼Eの角膜頂点位置と光軸N1とが一致する位置に設定されている。また、本実施例では、アライメント基準位置Qを中心とした所定の領域が、アライメントの適否を判定するための許容範囲A1として設定されている。例えば、制御部170は、被検眼Eに対する測定光束の位置ずれが検出されると、その検出結果に基づいて、偏位量Δdが許容範囲A1におさまるように、移動台103及び駆動部106を制御し、測定部104をX方向及びY方向に移動させる。
また、例えば、制御部170は、無限遠のアライメント指標像Ma及びMeの像間隔aと、有限遠のアライメント指標像Mh及びMfの像間隔bと、の像比率(つまり、a/b)を比較することによって、Z方向の位置ずれを検出する。なお、Z方向についても、アライメントの適否を判定するための許容範囲が設定されてもよい。例えば、制御部170は、被検眼Eに対する測定光束の位置ずれが検出されると、その検出結果に基づいて、移動台103を制御し、測定部104をZ方向に移動させる。
例えば、制御部170は、撮像素子502からの撮像信号に基づいて、このように測定部104を移動させることによって、被検眼Eと測定部104との位置合わせ(すなわち、アライメント)を自動的に行う。もちろん、検者がジョイスティック105を操作して、被検眼Eと測定部104との位置合わせを手動で行ってもよい。例えば、制御部170は、被検眼EのXYZ方向における偏位量が許容範囲内におさまったときにアライメントが一致したと判定し、移動台103及び駆動部106の駆動を停止させるとともに、アライメント完了信号を出力する。なお、本実施例では、被検眼Eに対するアライメントが完了した後であっても、XYZ方向の位置ずれを随時検出する追尾制御(トラッキング)を行い、偏位量が常に許容範囲内におさまるようにしてもよい。
<第1眼屈折力の測定と取得>
アライメントが完了すると、制御部170は、被検眼Eの遠方距離における眼屈折力(以下、第1眼屈折力)の測定を開始する。なお、第1眼屈折力の測定時には、始めに予備測定が行われ、予備測定に続いて本測定を行うようにしてもよい。この場合には、予備測定の結果に基づいて光源301及び第1固視標板302aが光軸N2方向に移動され、被検眼Eに対して雲霧がかけられる。また、雲霧がかけられた被検眼Eに対して、第1眼屈折力の測定結果が取得される。
図5は撮像素子226が受光する画像データの一例である。制御部170は、測定光学系200が備える光源211から測定光束を照射する。測定光束は眼底Efに到達し、眼底Efで反射された後に、リングレンズ225を介して撮像素子226に到達する。これによって、撮像素子226はリング像Rを検出する。撮像素子226からの出力信号は、画像データとして画像処理部172に記憶される。なお、本実施例において、制御部170は、撮像素子226に画像データを連続して撮像させることで、画像データの加算処理及び蓄積処理を行うようにしてもよい。
制御部170は、画像処理部172に記憶された画像データを解析することで、被検眼Eの他覚的に測定された眼屈折力を取得する。なお、このような眼屈折力は、被検眼Eの球面情報(例えば、球面度数、等)や乱視情報(例えば、柱面度数、乱視軸角度、等)であってもよい。例えば、被検眼Eが正視眼(つまり、球面度数が0D)であれば、眼底Efからの反射光束はリングレンズ225に平行光束(略平行光束)として入射する。このため、撮像素子226には、リングレンズ225と同じ大きさのリング像Rが結像する。一方、例えば、被検眼Eが遠視眼(例えば、球面度数が+3D、等)であれば、撮像素子226には、球面度数に応じて拡大されたリング像Rが結像する。また、例えば、被検眼Eが近視眼(例えば、球面度数が-3D、等)であれば、撮像素子226には、球面度数に応じて縮小されたリング像Rが結像する。なお、例えば、被検眼Eが乱視眼(例えば、柱面度数が-2Dであり乱視軸角度が45度、等)であれば、撮像素子226には、柱面度数に応じて楕円形状となり、乱視軸角度に応じて傾斜したリング像Rが結像する。
制御部170は、画像データを細線化し、各経線方向におけるリング像Rの位置を特定する。例えば、リング像Rの位置は、輝度信号を検出して、そのピーク値や重心位置等を求めることにより特定してもよい。続いて、制御部170は、特定したリング像Rの位置に基づいて、最小二乗法等によりリング像Rを近似し、近似されたリング像Rの形状から各経線方向の眼屈折力を求める。また、制御部170は、この眼屈折力に対して所定の処理を行うことで、被検眼Eの他覚的に測定された眼屈折力を取得する。なお、ここでは、被検眼Eの遠方距離に第1固視標板302aが配置されているため、被検眼Eの遠方視状態における第1眼屈折力(すなわち、遠方視状態における球面度数、柱面度数、乱視軸角度、等)が、測定結果として取得される。制御部170は、第1眼屈折力をメモリ175に記憶する。
<第2眼屈折力の測定と取得>
例えば、検者は、被検眼Eの第1眼屈折力を取得すると、スイッチ部108を操作して、被検眼Eの近方距離における第2眼屈折力を測定するための近方視モードを設定する。もちろん、制御部170が、被検眼Eの第1眼屈折力を取得した後で、自動的に近方視モードを設定してもよい。制御部170は、固視標呈示光学系300が備える駆動部307を駆動して、被検眼Eから第1固視標板302aまでの距離が第2呈示距離となるように、第1固視標板302aを所定の近方位置に移動させる。例えば、所定の近方位置は、第2呈示距離が光学的に30cmとなる位置、等に予め設定されていてもよい。もちろん、所定の近方位置は、第2呈示距離が、検者によって入力された任意の呈示距離となる位置に設定されてもよい。これによって、被検眼Eを近方視状態とすることができる。
なお、このとき、被検眼EのXYZ方向における位置ずれが検出された場合には、被検眼と測定部104とのアライメント(位置合わせ)を再度実施してもよい。前述の追尾制御によって、XYZ方向の偏位量が常に許容範囲内におさまるようにしてもよい。例えば、制御部170は、アライメントの検出結果に基づいて、眼屈折力の変化が安定した状態における第2眼屈折力を取得するための制御を開始する。
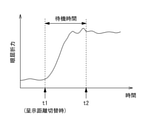
図6は固視標板の呈示距離の変更にともなう眼屈折力の変化を説明する図である。縦軸は被検眼Eの眼屈折力(例えば、本実施例では球面度数S)を表しており、横軸は時間を表している。例えば、第1固視標板302aの呈示距離は、被検眼Eの遠方距離における測定を開始してからある時間t1が経過したときに(すなわち、遠方距離における測定が終了したときに)、第1呈示距離から第2呈示距離に設定される。つまり、第1固視標板302aの呈示距離は、ある時間t1が経過したときに、遠方距離から近方距離に切り替えられる。このとき、被検眼Eに第1固視標板302aが近づくので、被検眼Eは遠くに位置する固視標に合わせていたピントを近くに移動された固視標に合わせようとする。被検眼Eのピントは、第1固視標板302aの呈示距離が切り替えられた後、時間の経過とともに徐々に合わせられる。また、被検眼Eの眼屈折力は、第1固視標板302aの呈示距離が切り替えられた後、時間の経過とともに徐々に安定する傾向がある。例えば、図4に示すように、被検眼Eの眼屈折力は、第1固視標板302aの呈示距離が切り替えられてからある時間t2が経過するまで(待機時間が経過するまで)は変化が大きく不安定であるが、時間t2以降は変化が少なく安定している。
制御部170は、呈示距離が切り替えられた後、アライメントが一致した状態(あるいは、アライメントが許容範囲内におさまった状態)であり、かつ被検眼Eの眼屈折力の変化が安定した状態において、第2眼屈折力を測定する。例えば、眼屈折力の変化が安定した状態は、予め設定された所定の待機時間(例えば、1秒等)が経過したタイミングとされてもよい。例えば、この場合、制御部170は、被検眼と測定手段とのアライメントの一致を検出すると、所定の待機時間のカウントを開始してもよい。なお、待機時間は、第1固視標板302aの呈示距離を切り替えてから眼屈折力の変化が安定するまでに要する時間を実験やシミュレーション等により求めておき、この時間以上の長さに設定されてもよい。
また、例えば、眼屈折力の変化が安定した状態は、眼屈折力の変化が安定したか否かを判定することによって検出されてもよい。一例として、この場合には、被検眼Eの眼屈折力をリアルタイムに測定してモニタリングすることで、眼屈折力の測定結果のゆらぎが検出される。例えば、測定結果のゆらぎとしては、単位時間内における複数の測定結果の標準偏差、単位時間内における複数の測定結果の最大値と最小値の差、変動する測定結果の周波数、等の少なくともいずれかを採用することができる。例えば、制御部170は、被検眼と測定手段とのアライメントの一致を検出すると、判定処理を開始して測定結果のゆらぎが閾値以下となったタイミングを、眼屈折力の変化が安定した状態として判定する。例えば、このような閾値は、予め実験やシミュレーションにより設定しておいてもよいし、検者が任意の閾値を設定してもよい。
なお、本実施例において、制御部170は、検出した眼屈折力の測定結果のゆらぎを、眼屈折力の変化を示す情報として出力してもよい。この場合、制御部170は、眼屈折力をリアルタイムに測定した結果から、眼屈折力と時間の関係を示す近似曲線データ600を生成する。
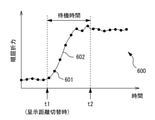
図5は近似曲線データ600の一例である。縦軸は被検眼Eの眼屈折力(例えば、本実施例では球面度数S)を表しており、横軸は時間を表している。例えば、近似曲線データ600には、眼屈折力の測定結果が測定タイミング毎にプロットされた複数の点601が含まれる。また、例えば、近似曲線データ600には、プロットされた複数の点601に基づいて生成された近似曲線602が含まれる。なお、近似曲線データ600としては、複数の点601及び近似曲線602の一方のみが生成されてもよいし、他の形式のグラフが生成されてもよい。例えば、制御部170は、近似曲線602の傾きが閾値以下となったタイミングを、眼屈折力の変化が安定した状態として判定してもよい。なお、このような閾値は、予め実験やシミュレーションにより設定しておいてもよいし、検者が任意の閾値を設定してもよい。
例えば、制御部170は、呈示距離を切り替えてから所定の待機時間が経過したタイミング、あるいは、測定結果のゆらぎや近似曲線602が閾値以下となったタイミングにて、被検眼Eの第2眼屈折力を測定する。第2眼屈折力は、第1眼屈折力と同様に、被検眼Eに投影されたリング像Rの検出及び解析により測定することができる。ここでは、被検眼Eの近方距離に第1固視標板302aが配置されているため、被検眼Eの近方視状態における第2眼屈折力(すなわち、近方視状態における球面度数、柱面度数、乱視軸角度、等)が、測定結果として取得される。制御部170は、第2眼屈折力をメモリ175に記憶する。
<第1眼屈折力及び第2眼屈折力の出力>
被検眼Eの第1眼屈折力及び第2眼屈折力を取得し終えると、制御部170はメモリ175からそれぞれの測定結果を呼び出し、これらを比較可能に出力する。例えば、第1眼屈折力及び第2眼屈折力は、モニタ107への表示、外部メモリ(例えば、USBメモリ等)への保存、別装置への送信、プリンタ等を用いた印刷、等によって比較可能に出力されてもよい。なお、第1眼屈折力及び第2眼屈折力とともに、生成された近似曲線データ600等が出力されてもよい。
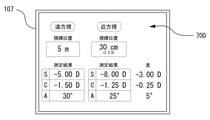
例えば、本実施例では、第1眼屈折力及び第2眼屈折力の比較画面700がモニタ107に表示される。図6は比較画面700の一例である。例えば、比較画面700には、第1眼屈折力及び第2眼屈折力として、被検眼Eの球面情報(例えば、球面度数S)と、被検眼Eの乱視情報(すなわち、柱面度数C及び乱視軸角度A)と、が比較可能に表示される。なお、本実施例では、第1眼屈折力及び第2眼屈折力として、被検眼Eの少なくとも乱視情報が比較可能に表示される。また、例えば、比較画面700には、制御部170により演算された第1眼屈折力と第2眼屈折力との差分が表示されてもよい。例えば、このような比較画面700によって、検者は、第1固視標板302aの呈示距離を遠方距離から近方距離に切り替えた場合に、被検眼Eの眼屈折力が変化したかどうかを確認することができる。
図7は第1眼屈折力及び第2眼屈折力を送信する別装置の一例である。例えば、本実施例においては、第1眼屈折力及び第2眼屈折力の測定結果、第1眼屈折力と第2眼屈折力の差分、等が、比較画面700としてモニタ107に表示されるとともに、別装置へと送信される。例えば、別装置としては、図7に示すような自覚式検眼装置1等であってもよい。これによって、検者は、被検眼Eの第1眼屈折力及び第2眼屈折力を考慮して、自覚式検眼装置1を用いた検査を実施してもよい。
以上説明したように、例えば、本実施例における眼科装置は、被検眼に対する固視標の呈示距離が設定された後、被検眼の眼屈折力の変化が安定した状態において眼屈折力を取得し、取得された眼屈折力を出力する。これによって、検者は、被検眼の他覚的な眼屈折力を精度よく取得することができる。
また、例えば、本実施例における眼科装置は、被検眼の眼屈折力の変化が安定したか否かを判定し、その判定結果に基づいて、被検眼の眼屈折力を取得する。これによって、検者は、被検眼の眼屈折力の変化が安定したことを容易に把握でき、より精度高く眼屈折力を取得することができるようになる。
また、例えば、本実施例における眼科装置は、第1眼屈折力及び第2眼屈折力を比較可能に出力する。これによって、検者は、第1眼屈折力と第2眼屈折力との測定結果にずれがあるかどうかを容易に判断することができる。
また、例えば、本実施例における眼科装置は、被検眼の遠方距離における第1眼屈折力と、被検眼の近方距離における第2眼屈折力と、を取得する。固視標が短い呈示距離にて被検眼に投影された場合は、特に、被検眼の眼屈折力が不安定になりやすい傾向がある。検者は、固視標を近方距離に設定した場合であっても、近方距離での眼屈折力の変化が安定した状態において、眼屈折力を取得することができる。このため、被検眼の近方距離での他覚的な眼屈折力を精度よく取得することができる。
また、例えば、本実施例における眼科装置は、第1眼屈折力と第2眼屈折力との差分を演算して出力する。これによって、検者は、第1眼屈折力と第2眼屈折力との測定結果にどの程度のずれがあるかを容易に確認することができる。
<変容例>
なお、本実施例では、固視標の呈示距離が第1呈示距離と第2呈示距離に設定される構成を例に挙げて説明したがこれに限定されない。固視標の呈示距離は、第1呈示距離と第2呈示距離とを含む複数の呈示距離に設定される構成でもよい。すなわち、2つ以上の呈示距離に設定される構成でもよい。一例としては、第1呈示距離と第2呈示距離に加えて、第3呈示距離が設定されてもよい。この場合、第1呈示距離、第2呈示距離、及び第3呈示距離は、それぞれ、被検眼の遠方距離、中間距離、及び近方距離に設定されてもよい。なお、このように複数の呈示距離を設定する場合、後述する報知情報として、被検眼の眼屈折力がどの呈示距離にて変化したかの情報が出力されてもよい。一例として、被検眼の柱面度数が変化したときの呈示距離が示されてもよい。
なお、本実施例では、固視標の呈示距離が第1呈示距離と第2呈示距離に設定され、これらの呈示距離が切り替えられる場合に、眼屈折力の変化が安定した状態において、被検眼の眼屈折力を取得する構成を例に挙げて説明したがこれに限定されない。例えば、第1固視標板302aが初期位置から所定の呈示距離に設定されるような場合であっても、眼屈折力の変化が安定した状態において、被検眼の眼屈折力が取得されてもよい。
なお、本実施例では、被検眼Eの眼屈折力の変化が安定した状態にて、第2呈示距離における第2眼屈折力が取得される構成を例に挙げて説明したがこれに限定されない。もちろん、被検眼Eの眼屈折力の変化が安定した状態にて、第1呈示距離における第1眼屈折力が取得される構成であってもよい。すなわち、本実施例では、取得される第1眼屈折力と第2眼屈折力の少なくともいずれかは、眼屈折力の変化が安定した状態にて取得された眼屈折力であってもよい。もちろん、このような場合には、取得される第1眼屈折力と第2眼屈折力の少なくともいずれかについて、眼屈折力の変化が安定したか否かが判定されてもよい。
なお、本実施例では、被検眼Eに対する第1固視標板302aの第1呈示距離と第2呈示距離として、遠方距離から近方距離に切り替える構成を例に挙げて説明したがこれに限定されない。例えば、被検眼Eに対する第1固視標板302aの呈示距離は、遠方距離から中間距離に切り替えられてもよいし、中間距離から近方距離に切り換えられてもよい。すなわち、被検眼に対する固視標の呈示距離が短くなるように、第1呈示距離と第2呈示距離とが切り替えられてもよい。なお、被検眼に対する固視標の呈示距離が長くなるように、第1呈示距離と第2呈示距離とが切り替えられてもよい。一例としては、被検眼Eに対する第1固視標板302aの呈示距離が、近方距離から遠方距離、近方距離から中間距離、中間距離から遠方距離、等に切り換えられてもよい。このような場合でも、被検眼Eの眼屈折力は不安定になることがあるため、眼屈折力の変化が安定した状態において、眼屈折力を取得することが好ましい。
なお、本実施例では、固視標板302の位置を光軸N2方向へ移動させることによって、被検眼Eに呈示する固視標の呈示位置を変更する構成を例に挙げて説明したがこれに限定されない。例えば、被検眼Eに呈示する固視標の呈示位置は、固視標呈示光学系300の光路内において光学部材を駆動させることにより変更されてもよい。例えば、この場合には、レンズ、プリズム、ミラー、等の少なくともいずれかの光学部材を、光軸N2上に挿抜するようにしてもよい。
なお、本実施例では、被検眼Eの眼屈折力をモニタリングし、眼屈折力の変化が安定した状態を検出したタイミングにて測定が行われ、被検眼Eの第2眼屈折力が取得される構成を例に挙げて説明したがこれに限定されない。例えば、検者が、被検眼Eの眼屈折力をモニタリングした結果を後から確認して任意の結果を選択することで、被検眼Eの第2眼屈折力が取得される構成としてもよい。この場合、制御部170は、被検眼Eの眼屈折力をモニタリングしながら、随時撮像されるリング像Rを解析してもよい。また、制御部170は、モニタリングした時間と、リング像Rの解析結果(すなわち、眼屈折力)と、を対応付けてメモリ175に記憶してもよい。例えば、検者は、モニタ107に表示される近似曲線データ600から、近似曲線602上の任意の位置を選択することによって、被検眼Eの安定した状態での第2眼屈折力を取得することができる。
なお、本実施例においては、被検眼Eの眼屈折力の変化が安定した状態を、眼屈折力のゆらぎから判定する構成を例に挙げて説明したがこれに限定されない。例えば、被検眼Eの眼屈折力の変化が安定した状態は、眼屈折力のゆらぎとは異なる指標を用いて判定される構成であってもよい。例えば、この場合には、被検眼Eの調節力が指標として用いられてもよい。
なお、本実施例においては、比較画面700として、被検眼Eの第1眼屈折力、被検眼Eの第2眼屈折力、第1眼屈折力と第2眼屈折力との差分、が表示される構成を例に挙げて説明したがこれに限定されない。例えば、比較画面700には、被検眼Eの第1眼屈折力及び第2眼屈折力と、第1眼屈折力と第2眼屈折力との差分と、の少なくともいずれかが表示される構成であってもよい。もちろん、比較画面700には、これらの他に、被検眼Eの調節力等が表示されてもよい。
なお、本実施例における眼科装置は、被検眼Eに対する固視標の呈示距離を変更した際に、第1眼屈折力から第2眼屈折力への変化を報知するための報知情報を出力するようにしてもよい。例えば、報知情報とは、第1眼屈折力から第2眼屈折力への変化がみられたことを示す情報であってもよいし、第1眼屈折力から第2眼屈折力への変化がみられないことを示す情報であってもよい。もちろん、どの程度の変化があったのかを表した変化量を示す情報であってもよい。なお、このような報知情報は、モニタ107に表示するメッセージ、図示なきスピーカから発せられる音声ガイド、等により出力されてもよい。これによって、検者は、被検眼の眼屈折力の状態を容易に把握することができる。
以下、第1眼屈折力から第2眼屈折力への変化がみられなかった場合を例に挙げて、報知情報の出力について説明する。ここでは、固視標の呈示距離を遠方距離から30cmの近方距離に切り替えた場合を例示する。例えば、近方距離30cmは、3.3Dの眼屈折力に相当する。このため、第1眼屈折力が-5Dであった被検眼Eは、固視標の呈示距離を切り替えたことによって、眼屈折力が-8D程度になることが望ましい。しかし、被検眼Eの状態によっては、眼屈折力が-8D程度にならないことがある。
そこで、制御部170は、望ましい眼屈折力(本実施例では-8D)を基準値として設け、被検眼Eの第2眼屈折力がその基準値に到達していない場合には、その旨を表すメッセージをモニタ107へ表示する。例えば、-5Dの第1眼屈折力をもつ被検眼の第2眼屈折力が-7Dとなった場合に、基準値に到達していないことを示すメッセージが表示される。なお、このようなメッセージとともに、眼屈折力の変化量(すなわち、本実施例では-2D)が表示されるようにしてもよい。
なお、基準値には所定の許容範囲が設けられてもよい。所定の許容範囲は、実験やシミュレーション等により予め設定されていてもよいし、検者が任意の許容範囲を設定できるようにしてもよい。本実施例では、一例として、基準値に対して±0.5Dの許容範囲が設定され、被検眼Eの第2眼屈折力が7.5D未満と取得された場合に、メッセージが表示されてもよい。
なお、上記では、望ましい眼屈折力に対して基準値を設けているが、第1眼屈折力(本実施例では-5D)に対して基準値を設けてもよい。この場合、制御部170は、被検眼Eの第2眼屈折力がその基準値を超えていないときに、その旨を表すメッセージをモニタ107へ表示する等して検者に報知してもよい。
例えば、本実施例における眼科装置が、このように第1眼屈折力から第2眼屈折力への変化がみられなかった場合に、報知情報を出力する構成であることによって、検者は、被検眼の眼屈折力が第1眼屈折力から第2眼屈折力に変化しなかったことを容易に知ることができる。
なお、本実施例における眼科装置では被検眼Eの左眼と右眼とが交互に測定されるが、このような眼科装置とは異なる構成の眼科装置において、本実施例にて例示した技術の少なくとも一部を適用することができる。例えば、眼科装置は、被検眼Eの眼前が開放された状態にて、被検眼Eの他覚眼屈折力を測定することが可能な装置であってもよい。すなわち、眼科装置は、被検眼の左眼及び右眼の双方の眼底に測定光束を投影し、両眼開放状態にて被検眼の眼屈折力を他覚的に測定する測定手段と、両眼開放状態において固視標の呈示距離を設定する設定手段と、両眼開放状態において呈示距離が設定された後に、眼屈折力の変化が安定した状態の眼屈折力を取得する取得手段と、両眼開放状態において取得した眼屈折力を出力する出力手段と、を備えた眼科装置であってもよい。
例えば、本実施例における眼科装置が、両眼開放状態において呈示距離が設定された後に、眼屈折力の変化が安定した状態の眼屈折力を取得して出力することによって、検者は、固視標の呈示距離を設定したことによる被検眼の輻輳状態を考慮した測定結果を取得することができる。