KR20130014357A - 전동 배력 장치 - Google Patents
전동 배력 장치 Download PDFInfo
- Publication number
- KR20130014357A KR20130014357A KR1020120074991A KR20120074991A KR20130014357A KR 20130014357 A KR20130014357 A KR 20130014357A KR 1020120074991 A KR1020120074991 A KR 1020120074991A KR 20120074991 A KR20120074991 A KR 20120074991A KR 20130014357 A KR20130014357 A KR 20130014357A
- Authority
- KR
- South Korea
- Prior art keywords
- control
- brake
- amount
- input
- brake pedal
- Prior art date
Links
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
- B60T13/745—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive acting on a hydraulic system, e.g. a master cylinder
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/74—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with electrical assistance or drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T11/00—Transmitting braking action from initiating means to ultimate brake actuator without power assistance or drive or where such assistance or drive is irrelevant
- B60T11/10—Transmitting braking action from initiating means to ultimate brake actuator without power assistance or drive or where such assistance or drive is irrelevant transmitting by fluid means, e.g. hydraulic
- B60T11/16—Master control, e.g. master cylinders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/12—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release the fluid being liquid
- B60T13/14—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release the fluid being liquid using accumulators or reservoirs fed by pumps
- B60T13/142—Systems with master cylinder
- B60T13/145—Master cylinder integrated or hydraulically coupled with booster
- B60T13/146—Part of the system directly actuated by booster pressure
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/662—Electrical control in fluid-pressure brake systems characterised by specified functions of the control system components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/68—Electrical control in fluid-pressure brake systems by electrically-controlled valves
- B60T13/686—Electrical control in fluid-pressure brake systems by electrically-controlled valves in hydraulic systems or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/02—Brake-action initiating means for personal initiation
- B60T7/04—Brake-action initiating means for personal initiation foot actuated
- B60T7/042—Brake-action initiating means for personal initiation foot actuated by electrical means, e.g. using travel or force sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T8/00—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force
- B60T8/32—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration
- B60T8/321—Arrangements for adjusting wheel-braking force to meet varying vehicular or ground-surface conditions, e.g. limiting or varying distribution of braking force responsive to a speed condition, e.g. acceleration or deceleration deceleration
- B60T8/3255—Systems in which the braking action is dependent on brake pedal data
- B60T8/326—Hydraulic systems
- B60T8/3265—Hydraulic systems with control of the booster
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T2270/00—Further aspects of brake control systems not otherwise provided for
- B60T2270/40—Failsafe aspects of brake control systems
- B60T2270/402—Back-up
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Braking Systems And Boosters (AREA)
- Regulating Braking Force (AREA)
- Transmission Devices (AREA)
Abstract
본 발명은, 전동 배력 장치에 있어서 브레이크 페달의 조작에 대한 반력의 급격한 변화를 억제하여, 브레이크 페달의 조작감을 개선하는 것을 과제로 한다.
입력 로드(7)의 이동량에 기초하여, 마스터압 제어 장치(3)에 의해 전동 모터(20)를 제어하고, 볼-나사 기구(25)를 통해 프라이머리 피스톤(40)을 추진하여 마스터 실린더(9)로 브레이크 액압을 발생시킨다. 마스터 실린더(9)의 브레이크 액압을 입력 피스톤(16)에 의해 입력 로드(7)를 통해 브레이크 페달(100)에 피드백한다. 입력 로드(7)의 이동량이 정해진 임계값에 도달했을 때, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 작게 한다. 이에 따라, 전동 모터(20)가 전부하 상태에 도달하여 프라이머리 피스톤(40)이 정지한 후, 운전자의 답력(踏力)에 의해 입력 피스톤(16)만이 전진할 때의 답력의 변동을 경감하여, 브레이크 페달(100)의 조작감을 개선한다.
입력 로드(7)의 이동량에 기초하여, 마스터압 제어 장치(3)에 의해 전동 모터(20)를 제어하고, 볼-나사 기구(25)를 통해 프라이머리 피스톤(40)을 추진하여 마스터 실린더(9)로 브레이크 액압을 발생시킨다. 마스터 실린더(9)의 브레이크 액압을 입력 피스톤(16)에 의해 입력 로드(7)를 통해 브레이크 페달(100)에 피드백한다. 입력 로드(7)의 이동량이 정해진 임계값에 도달했을 때, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 작게 한다. 이에 따라, 전동 모터(20)가 전부하 상태에 도달하여 프라이머리 피스톤(40)이 정지한 후, 운전자의 답력(踏力)에 의해 입력 피스톤(16)만이 전진할 때의 답력의 변동을 경감하여, 브레이크 페달(100)의 조작감을 개선한다.
Description
본 발명은 자동차 등의 차량의 브레이크 장치에 내장되는 배력 장치에 있어서, 배력원으로서 전동 액츄에이터를 이용한 전동 배력 장치에 관한 것이다.
전동 배력 장치로서, 예를 들어 특허문헌 1에 기재된 것이 있다. 이 전동 배력 장치는, 브레이크 페달에 연결된 입력 로드와, 입력 로드에 상대 이동 가능하게 외장된 부스터 피스톤과, 부스터 피스톤을 구동시키는 전동 모터와, 입력 로드의 이동에 따라서 전동 모터의 작동을 제어하는 컨트롤러를 구비하고, 입력 로드 및 부스터 피스톤에 의해 마스터 실린더의 피스톤을 추진하여, 전동 모터의 구동력을 부여함으로써, 브레이크 페달의 조작에 대하여 원하는 배력비를 얻도록 하고 있다. 이 때, 입력 로드와 부스터 피스톤의 상대 변위를 조정함으로써, 브레이크 페달의 조작량에 대한 부스터 출력을 변화시킬 수 있어, 배력 제어, 브레이크 어시스트 제어, 회생 협조 제어 등의 여러가지 브레이크 제어를 실행할 수 있다. 또, 전동 모터의 고장 등의 페일(fail)시에는, 입력 로드가 마스터 실린더의 피스톤에 접촉하는 것에 의해, 브레이크 페달로 마스터 실린더의 피스톤을 직접 압박함으로써 제동 기능을 유지할 수 있게 되어 있다.
그러나, 상기 종래의 전동 배력 장치에서는 다음과 같은 문제가 있다. 정차(停車)중에 운전자가 강하게 브레이크 페달을 밟은 경우를 상정한다. 운전자가 브레이크 페달을 밟으면, 입력 로드의 전진에 의해 전동 모터가 부스터 피스톤을 추진하여, 브레이크 페달의 조작량에 따라서 일정한 배력비로 마스터 실린더의 액압이 상승한다. 그리고, 전동 모터의 출력이 그 최대 출력에 도달하여, 부스터 피스톤의 추진력과 마스터 실린더 내의 액압에 의한 반력이 균형 잡히면, 부스터 피스톤이 정지하여 더 이상 전진할 수 없게 된다[전(全)부하 상태]. 그 후, 브레이크 페달을 더 밟으면, 입력 로드만이 전진하기 때문에, 부스터 피스톤의 정지에 의해 브레이크 액압의 승압 속도가 전부하 상태전보다 급격하게 저하하게 된다. 이 때문에, 브레이크 페달의 반력이 급격히 저하하게 된다. 그 후, 브레이크 페달을 더 밟으면, 상기 페일시와 마찬가지로 입력 로드가 정지중인 부스터 피스톤에 접촉하고, 마스터 실린더 내의 액압에 의한 모든 반력이 입력 로드를 통해 브레이크 페달에 작용하게 되어, 운전자는 브레이크 페달이 갑자기 고정된 것 같은 위화감을 느끼게 된다.
본 발명은 이러한 점을 감안하여 이루어진 것으로, 브레이크 페달의 조작에 대한 반력의 급격한 변화를 억제하여, 브레이크 페달의 조작감을 향상시키도록 한 전동 배력 장치를 제공하는 것을 목적으로 한다.
상기 과제를 해결하기 위해, 본 발명은, 브레이크 페달의 조작에 의해 진퇴 이동하는 입력 부재와, 이 입력 부재에 대하여 상대 이동 가능하게 설치되며, 전진에 의해 마스터 실린더 내에 브레이크 액압을 발생시키고, 상기 입력 부재의 전진에 의해 이 입력 부재가 접촉하는 배력 부재와, 상기 배력 부재를 구동시키는 전동 액츄에이터와, 상기 입력 부재의 이동에 기초하여 상기 전동 액츄에이터의 작동을 제어하는 제어 수단을 구비하고, 상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량을 변화시켜 상기 마스터 실린더 내에 브레이크 액압을 발생시키는 것이 가능한 전동 배력 장치에 있어서, 상기 제어 수단은, 상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하여 최대 출력을 발생시키는 제1 전부하 상태가 되기 전에, 상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량의 비율을 작게 전환하는 전환 제어를 실행하는 것을 특징으로 한다.
본 발명에 따른 전동 배력 장치에 의하면, 브레이크 페달의 조작에 대한 반력의 급격한 변화를 억제하여, 브레이크 페달의 조작감을 향상시킬 수 있다.
도 1은 본 발명의 일실시형태에 따른 전동 배력 장치가 내장된 자동차의 브레이크 제어 장치를 나타낸 개략도이다.
도 2는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치의 개략 구성을 나타내는 회로도이다.
도 3은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의한 전환 제어의 처리 구성을 나타내는 블록도이다.
도 4는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 5는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제1 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 6은 본 발명의 제1 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 7은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제2 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 8은 본 발명의 제2 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 9는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제3 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 10은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제4 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 11은 본 발명의 제4 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 12는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제5 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 13은 본 발명의 제5 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 14는 본 발명의 제5 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과, 입력 로드와 프라이머리 피스톤의 상대 변위량과의 관계를 나타내는 그래프이다.
도 2는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치의 개략 구성을 나타내는 회로도이다.
도 3은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의한 전환 제어의 처리 구성을 나타내는 블록도이다.
도 4는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 5는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제1 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 6은 본 발명의 제1 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 7은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제2 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 8은 본 발명의 제2 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 9는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제3 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 10은 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제4 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 11은 본 발명의 제4 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 12는 도 1에 나타내는 브레이크 제어 장치의 마스터압 제어 장치에 의해, 본 발명의 제5 실시형태에 따른 전환 제어를 실행하기 위한 플로우차트이다.
도 13은 본 발명의 제5 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과 브레이크 페달 답력의 관계를 나타내는 그래프이다.
도 14는 본 발명의 제5 실시형태에 따른 전환 제어에 의한 브레이크 페달의 이동량과, 입력 로드와 프라이머리 피스톤의 상대 변위량과의 관계를 나타내는 그래프이다.
이하, 본 발명의 실시형태를 도면에 기초하여 상세히 설명한다.
본 실시형태의 브레이크 제어 장치의 전체 구성을 도 1에 나타낸다. 도 1에서, 화살표가 있는 파선은 신호선이며, 화살표의 방향에 의해 신호의 방향을 표시하고 있다.
도 1에 나타낸 바와 같이, 본 실시형태에 따른 브레이크 제어 장치(1)는 자동차의 제동 장치에 적용하여, 좌측 전륜(FL), 우측 후륜(RR), 우측 전륜(FR), 좌측 후륜(RL)의 4륜의 제동력을 제어하기 위한 것이다. 브레이크 제어 장치(1)는 마스터 실린더(9)와, 마스터 실린더(9)에 접속된 리저버 탱크(10)와, 마스터 실린더(9)가 발생시키는 브레이크 액압인 마스터압을 제어하는 전동 배력 장치를 구성하는 마스터압 제어 기구(4)와, 마스터압 제어 기구(4)를 전기적으로 제어하기 위한 제어 수단인 마스터압 제어 장치(3)와, 각 차륜(FL, RR, FR, RL)의 액압 브레이크 장치(11a~11d)에 브레이크 액압을 공급하는 휠압 제어 기구(6)와, 휠압 제어 기구(6)를 전기적으로 제어하기 위한 휠압 제어 장치(5)를 구비하고 있다. 또, 도면에서, 도면부호 FL은 좌측 전륜, FR은 우측 전륜, RL은 좌측 후륜, RR은 우측 후륜의 각각의 차륜을 나타내고 있다.
액압 브레이크 장치(11a~11d)는 도시하지 않은 실린더, 피스톤 및 브레이크 패드 등으로 구성되어 있고, 휠압 제어 기구(6)로부터 공급된 브레이크 액압에 의해 피스톤이 추진되고, 피스톤에 연결된 브레이크 패드가 디스크 로터(101a~101d)에 압박되어 마찰 제동력을 발생시킨다. 디스크 로터(101a~101d)는 차륜과 일체로 회전하도록 되어 있고, 디스크 로터(101a~101d)에 작용하는 브레이크 토크는 차륜과 노면 사이에 작용하는 브레이크력이 된다.
마스터 실린더(9)는 프라이머리 피스톤(40)에 의해 가압되는 프라이머리 액실(42)과, 세컨더리 피스톤(41)에 의해 가압되는 세컨더리 액실(43)의 2개의 가압실을 갖는 탠덤식의 것이다. 프라이머리 피스톤(40)의 추진에 의해 세컨더리 피스톤(41)이 추진되어, 프라이머리 및 세컨더리 액실(42, 43)에서 가압된 브레이크액이 프라이머리 배관(102a) 및 세컨더리 배관(102b)을 경유하여 휠압 제어 기구(6)를 통해 각 차륜(FL, RR, FR, RL)의 액압 브레이크 장치(11a~11d)에 공급되도록 구성되어 있다.
리저버 탱크(10)는 리저버 포트를 통해 프라이머리 액실(42) 및 세컨더리 액실(43)에 접속되어 있다. 리저버 포트는 프라이머리 피스톤(40) 및 세컨더리 피스톤(41)이 후퇴 위치에 있을 때 개방되며, 프라이머리 액실(42) 및 세컨더리 액실(43)을 리저버 탱크(10)에 연통시켜 적절하게 브레이크액을 보충하고, 프라이머리 피스톤(40) 및 세컨더리 피스톤(41)이 전진하면 폐쇄하여, 프라이머리 액실(42) 및 세컨더리 액실(43)의 가압을 가능하게 한다.
이와 같이, 마스터 실린더(9)는 프라이머리 피스톤(40) 및 세컨더리 피스톤(41)의 2개의 피스톤에 의해 프라이머리 배관(102a) 및 세컨더리 배관(102b)으로부터 2계통의 액압 회로에 브레이크액을 공급하는 것이 가능하게 되어 있다. 이것에 의해, 만약 한쪽 액압 회로가 실패한 경우라도, 다른쪽 액압 회로에 의해 액압을 공급할 수 있어, 제동력을 확보할 수 있다.
마스터압 제어 기구(4)는, 프라이머리 피스톤(40)의 중심부에, 입력 피스톤(16)이 슬라이딩 가능하게 그리고 액밀적으로 관통되고, 입력 피스톤(16)의 선단부가 프라이머리 액실(42) 내에 삽입되도록 구성되어 있다. 입력 피스톤(16)의 후단부에는 입력 로드(7)가 연결되고, 입력 로드(7)는 마스터압 제어 기구(4)의 후단부로부터 외부로 연장되고, 그 선단부에 브레이크 페달(100)이 연결되어 있다. 입력 피스톤(16)은 입력 로드(7)와 함께 입력 부재를 구성하고 있다. 프라이머리 피스톤(40)과 입력 피스톤(16) 사이에는 한쌍의 중립 스프링(19A, 19B)이 개재되고, 프라이머리 피스톤(40)과 입력 피스톤(16)은 중립 스프링(19A, 19B)의 스프링력에 의해 중립 위치에 탄성적으로 유지되고, 이들의 축방향의 상대 변위에 대하여 중립 스프링(19A, 19B)의 스프링력이 작용하도록 되어 있다.
마스터압 제어 기구(4)는 배력 부재를 구성하는 프라이머리 피스톤(40)을 구동시키는 전동 액츄에이터인 전동 모터(20)와, 프라이머리 피스톤(40)과 전동 모터(20) 사이에 개재된 회전-직동 변환 기구인 볼-나사 기구(25) 및 감속 기구인 벨트 감속 기구(21)를 구비하고 있다. 전동 모터(20)는 그 회전 위치를 검출하는 회전 위치 센서(205)를 구비하며, 마스터압 제어 장치(3)로부터의 지령에 의해 작동하여 원하는 회전 위치를 얻을 수 있게 되어 있다. 전동 모터(20)는, 예를 들어 공지된 DC 모터, DC 브러시리스 모터, AC 모터 등으로 할 수 있지만, 제어성, 정숙성, 내구성 등의 관점에서 본 실시형태에서는 3상 DC 브러시리스 모터를 채택하고 있다. 또, 회전 위치 센서(205)의 신호에 기초하여, 볼-나사 기구(25)의 추진량, 즉, 프라이머리 피스톤(40)의 변위량을 산출할 수 있다.
볼-나사 기구(25)는 입력 로드(7)가 삽입된 중공의 직동 부재인 나사축(27)과, 나사축(27)이 삽입되는 원통형의 회전 부재인 너트 부재(26)와, 이들의 사이에 형성된 나사 홈에 장전된 복수의 볼(30)(강철구)을 구비하고, 너트 부재(26)의 전단부가 가동 부재(28)를 통해 프라이머리 피스톤(40)의 후단부에 접촉하고, 너트 부재(26)가 베어링(31)에 의해 회전 가능하게 지지되어 있다. 그리고, 마스터압 제어 기구(4)는 전동 모터(20)에 의해 벨트 감속 기구(21)를 통해 너트 부재(26)를 회전시킴으로써, 나사 홈 내에서 볼(30)이 구르고, 나사축(27)이 직선 운동하여, 가동 부재(28)를 통해 프라이머리 피스톤(40)을 압박하도록 되어 있다. 나사축(27)은 복귀 스프링(29)에 의해 후퇴 위치측으로 편향되어 있다.
또한, 회전-직동 변환 기구는 전동 모터(20)[즉, 벨트 감속 기구(21)]의 회전 운동을 직선 운동으로 변환하여 프라이머리 피스톤(40)에 전달하는 것이라면, 랙앤드피니언 기구 등의 다른 기구를 이용할 수 있지만, 본 실시형태에서는, 유격의 적음, 효율, 내구성 등의 관점에서 볼-나사 기구(25)를 채택하고 있다. 볼-나사 기구(25)는 백드라이버빌리티(backdrivability)를 갖고 있고, 나사축(27)의 직선 운동에 의해 너트 부재(26)를 회전시킬 수 있다. 또, 나사축(27)은 프라이머리 피스톤(40)에 후방에서 접촉하여, 프라이머리 피스톤(40)이 나사축(27)으로부터 떨어져 단독으로 전진할 수 있게 되어 있다. 이에 따라, 브레이크 작동중, 즉 마스터 실린더(9)에서 브레이크 액압이 발생하는 상태에서, 만약 전동 모터(20)가 단선 등에 의해 작동 불능이 된 경우, 나사축(27)이 복귀 스프링(29)의 스프링력에 의해 후퇴 위치로 복귀되기 때문에, 마스터 실린더(9)의 액압을 해제할 수 있어 브레이크의 끌림을 방지할 수 있다. 또, 전동 모터(20)가 작동 불능인 경우, 프라이머리 피스톤(40)은 나사축(27)으로부터 떨어져 단독으로 이동할 수 있기 때문에, 브레이크 페달(100)에 의해 입력 로드(7)를 통해 입력 피스톤(16)을 전진시키고, 그리고 입력 피스톤(16)을 프라이머리 피스톤(40)에 접촉시켜, 프라이머리 피스톤(40)을 직접 조작함으로써 액압을 발생시킬 수 있어, 제동 기능을 유지할 수 있다.
벨트 감속 기구(21)는 전동 모터(20)의 출력축에 부착된 구동 풀리(22)와, 볼-나사 기구(25)의 너트 부재(26)의 외주부에 부착된 종동 플리(32)와, 이들의 사이에 감겨 있는 벨트(24)를 포함하고, 전동 모터(20)의 출력축의 회전을 정해진 감속비로 감속하여 볼-나사 기구(25)에 전달하는 것이다. 벨트 감속 기구(21)에, 톱니바퀴 감속 기구 등의 다른 감속 기구를 조합해도 좋다. 벨트 감속 기구(21) 대신, 공지된 톱니바퀴 감속 기구, 체인 감속 기구, 차동 감속 기구 등을 이용할 수 있지만, 또 전동 모터(20)에 의해 충분히 큰 토크를 얻을 수 있는 경우에는, 감속 기구를 생략하고, 전동 모터(20)에 의해 볼-나사 기구(25)를 직접 구동시키도록 해도 좋다. 이에 따라, 감속 기구의 개재에 기인하여 발생하는 신뢰성, 정숙성, 탑재성 등에 따른 여러 문제를 회피할 수 있다.
입력 로드(7)에는, 브레이크 조작량 검출 장치(8)가 연결되어 있다. 브레이크 조작량 검출 장치(8)는 적어도 입력 로드(7)의 위치 또는 변위량(스트로크)을 검출할 수 있는 것이다. 또, 브레이크 조작량 검출 장치(8)는 입력 로드(7)의 변위 센서를 포함하는 복수의 위치 센서와, 운전자에 의한 브레이크 페달(100)의 답력을 검출하는 힘센서를 포함하는 것이어도 좋다. 또, 변위 센서로 브레이크 조작량을 검출하는 물리량으로서, 입력 로드(7)의 변위량, 브레이크 페달(100)의 스트로크량, 브레이크 페달(100)의 이동 각도, 브레이크 페달(100)의 답력, 또는 상기 복수의 센서 정보를 조합하여 검출해도 좋다. 브레이크 조작량 검출 장치(8)로는, 브레이크 페달(100)의 답력을 검출하는 답력 센서를 복수개 조합한 구성이나, 변위 센서와 답력 센서를 조합한 구성이어도 좋다. 이에 따라, 하나의 센서로부터의 신호가 끊어진 경우에도, 나머지 센서에 의해 운전자의 브레이크 요구가 검출, 인지되기 때문에 페일 세이프가 확보된다.
브레이크 조작량 검출 장치(8) 중 적어도 하나의 센서는 휠압 제어 장치(5)에 의해 전원 공급 및 신호 입력 처리가 행해지고, 나머지 센서는 마스터압 제어 장치(3)에 의해 전원 공급 및 신호 입력 처리가 행해진다. 이에 따라, 마스터압 제어 장치(3)와 휠압 제어 장치(5) 중 어느 것의 CPU 고장 또는 전원 고장이 발생한 경우에도, 나머지 센서와 제어 장치에 의해 운전자의 브레이크 요구가 검출, 인식되기 때문에 페일 세이프가 확보된다. 또, 도 1에서는, 브레이크 조작량 검출 장치(8)는 1개만 나타나 있지만, 마스터압 제어 장치(3)에 접속되는 것과, 휠압 제어 장치에 접속되는 것을 각각 설치하도록 해도 좋다.
다음으로, 마스터압 제어 기구(4)에 의한 마스터압 제어 장치(3)의 제어에 관해 설명한다.
브레이크 조작량 검출 장치(8)에 의해 검출된 브레이크 페달(100)의 조작량(변위량, 답력 등)에 기초하여, 전동 모터(20)를 작동시키고 프라이머리 피스톤(40)의 위치를 제어하여 액압을 발생시킨다. 이 때, 입력 피스톤(16)에 작용하는 액압에 의한 반력이 입력 로드(7)를 통해 브레이크 페달(100)에 피드백된다. 그리고, 프라이머리 피스톤(40)과 입력 피스톤(16)의 수압 면적비 및 상대 변위에 따라, 브레이크 페달(100)의 조작량과 발생 액압의 비인 배력비를 조정할 수 있다. 이 때, 마스터압에 따른 힘이 입력 로드(7)를 통해 브레이크 페달(100)에 작용하여, 브레이크 페달 반력으로서 운전자에게 전달되기 때문에, 별도로 브레이크 페달 반력을 생성하는 장치가 불필요해져, 브레이크 제어 장치(1)의 소형ㆍ경량화를 도모할 수 있어 차량에 대한 탑재성이 향상된다.
예를 들어, 입력 피스톤(16)의 변위에 대하여, 프라이머리 피스톤(40)을 추종시켜, 이들의 상대 변위가 0이 되도록 상대 변위 제어함으로써, 입력 피스톤(16)과 프라이머리 피스톤(40)의 수압 면적비에 의해 결정되는 일정한 배력비를 얻을 수 있다. 또, 입력 피스톤(16)의 변위에 대하여 비례 게인을 곱하여, 입력 피스톤(16)과 프라이머리 피스톤(40)의 상대 변위를 변화시킴으로써, 배력비를 변화시킬 수 있다. 즉, 입력 피스톤(16)의 이동량에 대하여 프라이머리 피스톤(40)의 이동량을 변화시켜, 브레이크 페달(100)의 조작량에 대한 부스터 출력을 변화시킬 수 있다.
이에 따라, 브레이크 페달(100)의 조작량, 조작 속도(조작량의 변화율) 등으로부터 긴급 브레이크의 필요성을 검지해서, 프라이머리 피스톤(40)의 이동량을 증대시켜 신속히 필요한 제동력(액압)을 얻는, 소위 브레이크 어시스트 제어를 실행할 수 있다. 또한, 회생 제동 시스템(도시하지 않음)으로부터의 신호에 기초해서, 회생 제동시에, 회생 제동분을 뺀 액압을 발생시키도록 프라이머리 피스톤(40)의 이동량을 조정하여, 회생 제동분과 액압에 의한 제동력의 합계로 원하는 제동력을 얻을 수 있도록 하는 회생 협조 제어를 실행할 수 있다. 또, 브레이크 페달(100)의 조작[입력 피스톤(16)의 변위량 등]에 상관없이, 전동 모터(20)를 작동시켜 프라이머리 피스톤(40)을 이동시킴으로써, 제동력을 발생시키는 자동 브레이크 제어를 실행하는 것도 가능하다. 이에 따라, 각종 센서 수단에 의해 검출된 차량 상태에 기초해서 자동적으로 제동력을 조정하여, 적절하게 엔진 제어, 스티어링 제어 등의 다른 차량 제어와 조합함으로써, 마스터압 제어 기구(4)를 이용하여 차량 추종 제어, 차선 일탈 회피 제어, 장애물 회피 제어 등의 차량의 운전 제어를 실행할 수도 있다.
다음으로, 입력 로드(7)의 추진력의 증폭에 관해 설명한다.
운전자의 브레이크 조작에 의한 입력 로드(7)를 통한 입력 피스톤(16)의 변위량에 따라서 프라이머리 피스톤(40)을 변위시킴으로써, 입력 로드(7)의 추진력에 따라서 프라이머리 피스톤(40)의 추진력이 부여되기 때문에, 입력 로드(7)의 추진력이 증폭되는 형태로 프라이머리 액실(42)이 가압된다. 그 증폭비(이하, 「배력비」라고 함)는, 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위 및 입력 피스톤(16)과 프라이머리 피스톤(40)의 단면적의 비 등에 따라 임의로 설정될 수 있다.
특히, 입력 로드(7)의 변위량과 동량만큼 프라이머리 피스톤(40)을 변위시키는 경우[입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위를 0으로 한 경우], 입력 피스톤(16)의 단면적을 「AI」로 하고, 프라이머리 피스톤(40)의 단면적을 「AA」로 하면, 배력비는 (AI+AA)/AI로서 일의적으로 정해진다. 즉, 필요한 배력비에 기초하여 AI와 AA를 설정하고, 그 변위량이 입력 피스톤(16)의 변위량과 같아지도록 프라이머리 피스톤(40)을 제어함으로써, 항상 일정한 배력비를 얻을 수 있다. 또, 프라이머리 피스톤(40)의 변위량은 회전 위치 센서(205)의 출력 신호에 기초하여 산출될 수 있다.
다음으로, 출력 가변 기능을 실행할 때의 처리에 관해 설명한다. 출력 가변 제어 처리는 입력 피스톤(16)의 변위량에 비례 게인(K1)을 곱한 양만큼 프라이머리 피스톤(40)을 변위시키는 제어 처리이다. 또, 비례 게인(K1)은 제어성의 관점에서는 1인 것(K1=1)이 바람직하지만, 긴급 브레이크 등에 의해 운전자의 브레이크 조작량을 넘는 큰 브레이크력이 필요한 경우 등에 있어서, 일시적으로 1을 넘는 값(K1>1)으로 변경해도 좋다. 이에 따라, 입력 피스톤(16)과 프라이머리 피스톤(40)의 상대 변위에 대하여 중립 스프링(19A, 19B)의 스프링력이 작용하여 입력 피스톤(16)에 작용하는 반력을 조정하고, 동량의 브레이크 조작량으로도 마스터압을 통상시(K1=1인 경우)에 비해 인상할 수 있어, 보다 큰 브레이크력을 발생시킬 수 있다. 여기서, 긴급 브레이크는, 예를 들어 브레이크 조작량 검출 장치(8)의 신호의 시간 변화율이 정해진 값을 상회하는지의 여부로 판정될 수 있다.
이상 설명한 바와 같이, 출력 가변 제어 처리에 의하면, 운전자의 브레이크 요구에 따른 입력 로드(7)의 변위량에 따라서 마스터압이 증감압되기 때문에, 운전자가 요구하는 브레이크력을 발생시킬 수 있다. 또, 비례 게인(K1)을 1 미만의 값(K1<1)으로 함으로써, 소위 하이브리드 자동차 또는 전기 자동차에 있어서, 액압 브레이크를 회생 브레이크력분만큼 감압하는 회생 협조 브레이크 제어에 적용하는 것도 가능하다.
다음으로, 자동 브레이크 기능을 실시할 때의 처리에 관해 설명한다.
자동 브레이크 제어 처리는, 마스터 실린더(9)의 작동압을 자동 브레이크의 요구 액압(이하, 자동 브레이크 요구 액압으로 칭함)으로 조절하기 위해, 프라이머리 피스톤(40)을 전진 및 후퇴시키는 처리이다. 이 경우의 프라이머리 피스톤(40)의 제어 방법으로는, 테이블을 이용해 사전에 취득된 프라이머리 피스톤(40)의 변위량과 마스터압의 관계에 기초하여, 자동 브레이크 요구 액압을 실현하는 프라이머리 피스톤(40)의 변위량을 추출하고, 이것을 목표치로 하는 방법, 마스터압 센서(56, 57)로 검출된 마스터압을 피드백하는 방법 등이 있지만, 어떤 방법을 채택하더라도 상관없다. 또, 자동 브레이크 요구 액압은 외부 유닛으로부터 수신되는 것이 가능하며, 예를 들어 차량 추종 제어, 차선 일탈 회피 제어, 장애물 회피 제어 등에서의 브레이크 제어에 적용될 수 있다.
다음으로, 휠압 제어 기구(6)의 구성과 작동에 관해 설명한다.
휠압 제어 기구(6)는 마스터 실린더(9)로 가압된 브레이크액의 각 액압 브레이크 장치(11a~11d)에의 공급을 제어하는 게이트 OUT 밸브(50a, 50b), 마스터 실린더(9)로 가압된 브레이크액의 펌프(54a, 54b)에의 공급을 제어하는 게이트 IN 밸브(51a, 51b), 마스터 실린더(9) 또는 펌프(54a, 54b)로부터 각 액압 브레이크 장치(11a~11d)에의 브레이크액의 공급을 제어하는 IN 밸브(52a~52d), 액압 브레이크 장치(11a~11d)를 감압 제어하는 OUT 밸브(53a~53d), 마스터 실린더(9)에서 발생한 브레이크 액압을 승압하는 펌프(54a, 54b), 펌프(54a, 54b)를 구동시키는 전동 모터(55), 마스터압을 검출하는 마스터압 센서(56, 57)를 갖는다. 또, 휠압 제어 기구(6)로는, 안티록 브레이킹 제어용의 액압 제어 유닛, 차량 거동 안정화 제어용의 액압 제어 유닛 등을 이용할 수 있다.
휠압 제어 기구(6)는 프라이머리 액실(42)로부터 브레이크액을 공급받아, 차륜(FL)과 차륜(RR)의 브레이크력을 제어하는 제1 브레이크 계통과, 세컨더리 액실(43)로부터 브레이크액을 공급받아, 차륜(FR)와 차륜(RL)의 브레이크력을 제어하는 제2 브레이크 계통의 2개의 계통으로 구성되어 있다. 이러한 구성을 채택함으로써, 한쪽 브레이크 계통이 실패한 경우에도, 정상적인 다른쪽 브레이크 계통에 의해 대각 2륜분의 브레이크력을 확보할 수 있기 때문에, 차량의 거동이 안정적으로 유지된다.
게이트 OUT 밸브(50a, 50b)는 마스터 실린더(9)와 IN 밸브(52a~52d) 사이에 설치되며, 마스터 실린더로 가압된 브레이크액을 액압 브레이크 장치(11a~11d)에 공급할 때 개방된다. 게이트 IN 밸브(51a, 51b)는 마스터 실린더(9)와 펌프(54a, 54b) 사이에 설치되며, 마스터 실린더로 가압된 브레이크액을 펌프(54a, 54b)로 승압하여 액압 브레이크 장치(11a~11d)에 공급할 때 개방된다.
IN 밸브(52a~52d)는 액압 브레이크 장치(11a~11d)의 상류에 설치되며, 마스터 실린더(9) 또는 펌프(54a, 54b)로 가압된 브레이크액을 액압 브레이크 장치(11a~11d)에 공급할 때 개방된다. OUT 밸브(53a~53d)는 액압 브레이크 장치(11a~11d)의 하류에 구비되며, 휠압을 감압할 때 개방된다. 또, 게이트 OUT 밸브, 게이트 IN 밸브, IN 밸브, OUT 밸브는 모두 솔레노이드(도시 생략)에의 통전에 의해 밸브의 개폐가 행해지는 전자식이며, 휠압 제어 장치(5)가 행하는 전류 제어에 의해 각 밸브의 개폐량을 독립적으로 조절할 수 있는 것이다.
게이트 OUT 밸브(50a, 50b)와 IN 밸브(52a~52d)가 상시 개방 밸브, 게이트 IN 밸브(51a, 51b)와 OUT 밸브(53a~53d)가 상시 폐쇄 밸브이다. 이러한 구성을 채택함으로써, 고장시에 이들 밸브에의 전력 공급이 정지된 경우에도, 게이트 IN 밸브와 OUT 밸브가 폐쇄되고, 게이트 OUT 밸브와 IN 밸브가 개방되어, 마스터 실린더(9)로 가압된 브레이크액이 모든 액압 브레이크 장치(11a~11d)에 도달하기 때문에, 운전자가 요구하는 브레이크력을 발생시킬 수 있다.
펌프(54a, 54b)는, 예를 들어 차량 거동 안정화 제어, 자동 브레이크 제어 등을 행하기 위해, 마스터 실린더(9)의 작동압을 넘는 압력이 필요한 경우에, 마스터압을 승압하여 액압 브레이크 장치(11a~11d)에 공급한다. 펌프(54a, 54b)로는, 플런저 펌프, 트로코이드 펌프, 기어 펌프 등의 사용이 가능하지만, 정숙성의 관점에서는 기어 펌프가 바람직하다.
전동 모터(55)는 휠압 제어 장치(5)의 제어 지령에 기초하여 공급되는 전력에 의해 동작하여 모터에 연결된 펌프(54a, 54b)를 구동시킨다. 모터로는, DC 모터, DC 브러시리스 모터, AC 모터 등의 사용이 가능하지만, 제어성, 정숙성, 내구성의 관점에서는, DC 브러시리스 모터가 바람직하다.
마스터압 센서(56)는 세컨더리측 마스터 배관(102b)의 하류에 설치되어 있고, 또한 마스터압 센서(57)는 프라이머리측 마스터 배관(102a)의 하류에 설치되어 있으며, 이들은 함께 마스터압을 검출하는 압력 센서이다. 마스터압 센서(56, 57)의 갯수 및 설치 위치에 관해서는, 제어성, 페일 세이프 등을 고려하여 임의로 결정할 수 있다.
그리고, 휠압 제어 장치(5)에 의해 전술한 휠압 제어 기구(6)의 작동을 제어하여, 각 차륜(FL, RR, FR, RL)의 액압 브레이크 장치(11a~11d)에 공급되는 브레이크 액압을 제어함으로써, 각종 브레이크 제어를 실행한다. 예를 들어, 제동시에 접지 하중 등에 따라서 각 차륜에 적절히 제동력을 배분하는 제동력 배분 제어, 제동시에 각 차륜의 제동력을 자동적으로 조정하여 차륜의 록을 방지하는 안티록 브레이킹 제어, 주행중의 차륜의 사이드 슬립을 검지하여 각 차륜에 적절하게 자동적으로 제동력을 부여함으로써, 언더스티어 및 오버스티어를 억제하여 차량의 거동을 안정시키는 차량 안정성 제어, 언덕길(특히, 오르막길)에서 제동 상태를 유지하여 발진을 보조하는 언덕길 발진 보조(HSA) 제어, 발진시 등에 있어서 차륜의 공전을 방지하는 트랙션 제어, 선행 차량에 대하여 일정한 차간을 유지하는 차량 추종 제어, 주행 차선을 유지하는 차선 일탈 회피 제어, 장애물과의 충돌을 회피하는 장애물 회피 제어 등을 실행할 수 있다.
또, 휠압 제어 기구(6)는 마스터압 제어 장치(3)의 고장시에는, 마스터압 센서(56)로 검지된 브레이크 액압에 의해 운전자의 브레이크 조작량을 검출하고, 이 검출값에 따른 휠압을 발생시키도록 펌프(54a, 54b) 등을 제어함으로써, 브레이크 제어 장치(1)의 제동 기능을 할 수 있다.
또, 마스터압 제어 장치(3)와 휠압 제어 장치(5)는 쌍방향 통신을 하고 있어, 제어 지령, 차량 상태량(요우 레이트, 전후 가속도, 횡가속도, 핸들 조타각, 차륜속, 차체속 등, 고장 정보, 작동 상태 등)을 공유하고 있다.
다음으로, 도 2를 참조하여, 마스터압 제어 장치(3)의 회로 구성의 일례에 관해 설명한다.
도 2에서, 마스터압 제어 장치(3)의 전기 회로는 굵은 선 프레임(201)으로 표시되고, 마스터압 제어 기구(4)의 전기 회로는 점선 프레임(202)으로 표시되어 있다. 또, 굵은 선 프레임(203)은 휠압 제어 장치(5)의 전기 회로를 나타내고 있다.
마스터압 제어 장치(3)의 전기 회로(201)는 차량 내의 전원 라인으로부터 ECU 전원 릴레이(214)를 통해 공급되는 전원이 5 V 전원 회로 (1)(215)과 5 V 전원 회로 (2)(216)에 입력되도록 되어 있다.
ECU 전원 릴레이(214)는 기동 신호(W/U)와, CAN 통신 I/F 회로(218)에서 CAN 수신에 의해 생성되는 기동 신호 중 어느 하나에 의해 턴온되는 구성으로 되어 있다. 상기 기동 신호는 도어 스위치 신호, 브레이크 스위치, 이그니션 스위치 신호 등을 사용할 수 있다. 이들 스위치를 복수개 사용하는 경우는, 마스터압 제어 장치(3)에 모두 취입되어, 복수 신호의 어느 하나의 스위치가 온될 때, 기동 신호가 ECU 전원 릴레이(214)를 턴온시키도록 작동하는 회로 구성으로 해도 좋다.
5 V 전원 회로 (1)(215)에 의해 얻어지는 안정된 전원(VCC1)은 중앙 제어 회로(211)[이하, CPU(211)라고 함]에 공급되도록 되어 있다. 또, 5 V 전원 회로 (2)(216)에 의해 얻어지는 안정된 전원(VCC2)은 감시용 제어 회로(219)에 공급되도록 되어 있다.
페일 세이프 릴레이 회로(213)는 차량 내의 전원 라인으로부터 후술하는 3상 모터 구동 회로(222)에 공급하는 전원을 차단할 수 있게 되어 있고, CPU(211)와 감시용 제어 회로(219)에 의해, 3상 모터 구동 회로(222)에의 전원 공급과 차단을 제어할 수 있게 되어 있다.
페일 세이프 릴레이 회로(213)를 통해 공급되는 전원은 필터 회로(212)를 통과함으로써 노이즈가 제거되어, 3상 모터 구동 회로(222)에 공급되도록 되어 있다.
CPU(211)에는, CAN 통신 I/F 회로(218)를 통해 마스터압 제어 장치(3) 이외로부터의 차량 정보와 자동 브레이크 요구 액압 등의 제어 신호가 입력되도록 되어 있다. 또, CPU(211)에는, 마스터압 제어 기구(4)측에 배치된 회전각 검출 센서(205), 모터 온도 센서(206), 변위 센서(207, 208)[도 1의 브레이크 조작량 검출 장치(8)에 대응] 및 마스터압 센서(209)[도 1의 마스터압 센서(56, 57)에 대응]로부터의 출력이 각각 회전각 검출 센서 I/F 회로(225), 모터 온도 센서 I/F 회로(226), 변위 센서 I/F 회로(227, 228) 및 마스터압 센서 I/F 회로(229)를 통해 입력되도록 되어 있다.
또, 도 2의 예에서는, 변위 센서(207, 208)[도 1의 브레이크 조작량 검출 장치(8)에 대응]는 2개의 변위 센서를 구비한 구성으로 하고 있지만, 적어도 하나 이상 구비한 구성이면 된다. 여기서 이용하는 센서는 답력 센서 또는 마스터압 센서로 해도 좋고, 상이한 센서를 적어도 2개 이상 조합한 구성으로 해도 좋다.
이와 같이 하여, 현시점에서의 마스터압 제어 기구(4)의 상황 등에 관한 정보를 입력하여, 마스터압 제어 기구(4)를 제어하고 고장 상태를 검지한다.
CPU(211)는 외부 장치로부터의 제어 신호 및 각 센서의 검출값에 기초해서, 3상 모터 구동 회로(222)에 적절한 신호를 출력하여, 전동 모터(20)를 제어하도록 되어 있다. 이 경우, 3상 모터 구동 회로(222)의 3상 출력의 각 상에는, 상전류 모니터 회로(223) 및 상전압 모니터 회로(224)가 구비되어 있고, 이들 상전류 모니터 회로(223) 및 상전압 모니터 회로(224)에 의해 각각 상전류 및 상전압을 감시하고, 이들의 출력은 CPU(211)를 통해 3상 모터 구동 회로(222)를 적절히 동작시키도록 하고 있다. 3상 모터 구동 회로(222)는 마스터압 제어 기구(4) 내의 모터(204)[도 1의 전동 모터(20)에 대응]에 접속되어 CPU(211)에 의한 제어에 따른 구동이 이루어지도록 되어 있다. 또한, 각 모니터값이 정상 범위에서 벗어난 경우, 제어 지령대로 제어되지 않은 경우 등에 고장이라고 판단하도록 되어 있다.
전기 회로(201)에는, CPU(211)와의 사이에서 신호의 송수신이 이루어지는, 예를 들어 고장 정보 등이 저장된 EEPROM을 포함하는 기억 회로(230)가 구비되고, CPU(211)는 검출된 고장 정보와, 마스터압 제어 기구(4)의 제어에서 이용하는 학습치(예를 들어, 제어 게인, 각종 센서의 오프셋값 등) 등을 기억 회로(230)에 기억시킬 수 있다. 또, 전기 회로(201)에는, CPU(211)와의 사이에서 신호의 송수신이 이루어지는 감시용 제어 회로(219)가 구비되어 있고, 감시용 제어 회로(219)는 CPU(211)의 고장 및 VCC1 전압 등을 감시한다. 그리고, CPU(211) 및 VCC1 전압 등의 이상을 검출한 경우는, 신속하게 페일 세이프 릴레이 회로(213)를 동작시켜, 3상 모터 구동 회로(222)에의 전원 공급을 차단한다. 감시용 제어 회로(219) 및 VCC2 전압의 감시는 CPU(211)에서 행해진다.
다음으로, 마스터압 제어 장치(3)에 의한 마스터압 제어 기구(4)의 전환 제어에 관해 도 3 내지 도 14를 참조하여 설명한다.
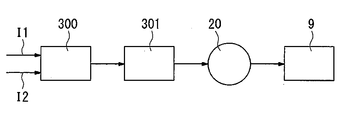
마스터압 제어 장치(3)에 의한 마스터압 제어 기구(4)의 전환 제어를 실행하기 위한 처리를 도 3에 나타낸다. 도 3에 나타낸 바와 같이, 마스터압 제어 장치(3)는 제어 입력(I1) 및 제어 전환 입력(I2)에 기초하여, 목표로 하는 프라이머리 피스톤(40)의 이동량을 결정하는 제어 전환 수단(300)과, 제어 전환 수단(300)의 출력 신호에 기초하여, 전동 모터(20)에 구동 전류를 공급하는 모터 구동 수단(301)을 구비하고 있다.
제어 전환 수단(300)에 입력되는 제어 입력(I1)은, 본 실시형태에서는, 브레이크 페달(100)에 연결된 입력 로드(7)의 변위량(이동량)을 이용하고 있다. 또, 입력 로드(7)의 변위량 외에, 운전자의 브레이크 페달(100)의 답력 또는 도시하지 않은 추정 수단에 의해, 입력 로드(7)의 위치, 프라이머리 피스톤(40)의 위치, 마스터 실린더(9) 내의 액압, 중립 스프링(19A, 19B)의 스프링력 등으로부터 계산에 의해 구한 추정 답력을 이용할 수 있다. 이 때, 이들 중 어느 하나를 제어 입력(I1)으로 해도 좋고, 복수개를 조합하여 제어 입력(I1)으로 해도 좋다. 이 제어 입력(I1)은 목표가 되는 프라이머리 피스톤(40)의 변위량(이동량)을 구하기 위해 이용되며, 프라이머리 피스톤(40)의 변위량은 제어 입력(I1)과의 관계를 미리 설정한 테이블로부터 구해도 좋고, 제어 입력(I1)에 기초하여 정해진 연산에 의해 구해도 좋다.
또, 제어 전환 수단(300)은 제어 전환 입력(I2)에 기초하여, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 변화시킨다. 제어 전환 입력(I2)은 입력 로드(7)의 위치, 프라이머리 피스톤(40)의 위치, 마스터 실린더(9) 내의 액압, 전동 모터(20)에 흐르는 전류, 또는 전술한 추정 답력으로 할 수 있다. 이 때, 이들 중 하나를 제어 전환 입력(I2)으로 해도 좋고, 복수개를 조합하여 제어 전환 입력(I2)으로 해도 좋다.
모터 구동 수단(301)은 제어 전환 수단(300)이 결정한 프라이머리 피스톤(40)의 목표 이동량(목표 위치)에 기초하여, 전동 모터(20)에 구동 전류를 공급하여, 프라이머리 피스톤(40)의 이동량이 목표 이동량이 되도록 전동 모터(20)를 구동시킨다. 이에 따라, 전동 모터(20)가 프라이머리 피스톤(40)을 목표 이동량까지 이동시켜, 마스터 실린더(9)로 원하는 브레이크 액압을 발생시킨다.
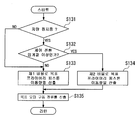
본 실시형태에서는, 제어 입력(I1) 및 제어 전환 입력(I2)에 기초하여, 제어 입력(I1)에 대한 프라이머리 피스톤(40)의 이동량의 비율을 브레이크 페달의 도중에서부터 작게 함으로써, 브레이크 페달의 조작 스트로크에서의 전동 모터(20)의 출력이 최대가 되는 전(全)부하점의 위치를 옮기고, 이 전부하점이 되고 나서부터 입력 피스톤이 프라이머리 피스톤(40)에 접촉하는 접촉점에 이르기까지의 조작 스트로크를 없애거나 또는 단축하는 것을 실현하려고 한다. 이러한 구성에 의해, 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선하는 것이 가능해진다. 이하에, 제어 전환 수단(300)에 의해, 제어 입력(I1)에 대한 프라이머리 피스톤(40)의 이동량의 비율을 변화시키는 구체적인 처리에 관해 도 4를 참조하여 설명한다.
우선, 단계 S131에서, 차량이 정지중인지의 여부를 판정한다. 여기서, 차량이 정차중인지의 여부는, 예를 들어, 도시하지 않은 차속 센서로부터 입력된 차속 정보에 의해, 차량의 다른 유닛이 입력한 차량 정지 정보를 CAN 통신에 의해 CAN 통신 I/F 회로(218)를 통해 수신함으로써, 또는 차량의 다른 유닛이 정차라고 판정한 결과를 CAN 통신을 통해 수신함으로써, 판정될 수 있다.
차량이 정지중이라고 판정된 경우, 단계 S132에서, 제어 전환 입력(I2)이 제1, 제2 비율의 전환을 위한 정해진 임계값 이상인지의 여부를 판정한다. 여기서, 제어 전환 입력(I2)은 후술하는 입력 로드(7)의 이동량(제1 실시형태), 마스터 실린더(9) 내의 액압(제2 실시형태), 브레이크 페달(100)의 답력(마스터압 제어 장치(3)에 입력된 정보를 이용하여 계산한 추정 답력을 포함)(제3 실시형태), 전동 모터(20)에 통전하는 전류값(제4 실시형태) 또는 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량(제5 실시형태) 중 어느 하나, 또는 이들 복수의 정보의 조합으로 할 수 있다.
제어 전환 입력(I2)이 임계값 미만인 경우, 단계 S133에서, 제어 입력(I1)이 되는 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 정해진 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 제어 전환 입력(I2)이 임계값 이상인 경우는, 단계 S134에서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율보다 작은 제2 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 그리고, 단계 S135에서, 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다. 또, 단계 S131에서 차량이 정지중이라고 판정되지 않은 경우, 단계 S133에서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다.
이와 같이, 본 실시형태에서는, 제어 입력(I1)에 대한 프라이머리 피스톤(40)의 이동량의 비율을, 제1 비율로부터 이것보다 작은 제2 비율로 전환하는 전환 제어를 실행하도록 하고 있다. 이러한 제어를 행함으로써, 전동 모터(20)의 출력이 최대가 되는 전부하점 및 입력 피스톤이 프라이머리 피스톤(40)에 접촉하는 접촉점에서의 브레이크 페달(100)의 답력의 변동을 작게 할 수 있다. 따라서, 브레이크 페달(100)의 조작감을 개선할 수 있다.
다음으로, 단계 S131에서, 차량이 정지중이라고 판정하는 조건에 관해 설명한다. 일반적으로, 차량 주행중에 브레이크 페달(100)을 전부하점 이후까지 밟는 상황은 급제동시 이외에는 그다지 존재하지 않는다. 한편, 차량의 정지중 또는 정지 직전에는 차량의 큰 감속도를 수반하지 않기 때문에, 운전자는 브레이크 페달(100)을 강하게 밟을 수 있어, 브레이크 페달(100)의 조작감의 변화를 느끼기 쉽다. 따라서, 정차 직전의 배력비를 저하시키지 않으면서 제어하고자 하는 경우는, 차속이 제로, 또는 차속이 제로인 상태가 일정 시간 계속되었을 때, 차량이 정지중이라고 판정하는 것이 좋다. 또, 정차 직전의 페달감을 개선하고자 하는 경우는, 차속이 일정 속도 이하일 때, 차량이 정지중이라고 판정하는 것이 좋다. 이에 따라, 차량 주행중에는, 어느 정도 배력비를 높이면서, 차량이 정지중 또는 정지 직전에는, 브레이크 페달(100)의 답력 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
전술한 단계 S132에서의 제어 전환 입력(I2)이 제1, 제2 비율의 전환을 위한 정해진 임계값 이상인지의 여부의 판정에 관해, 그 구체예를 제1~제5 실시형태로서 이하에 설명한다. 또, 상기 실시형태에서는 단계 S131에서 차량이 정지중인지의 여부를 판정했지만, 이것을 꼭 판정할 필요는 없고, 이하의 제1~5 실시형태에서는 차량이 정지중인지의 여부에 상관없이 제어를 행하도록 하고 있다.
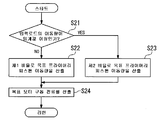
제1 실시형태로서, 제어 전환 입력(I2)을 입력 로드(7)의 이동량으로 하고, 입력 로드(7)의 이동량(스트로크)이 임계값 이상인지의 여부에 따라서, 입력 로드(7)의 이동량과 프라이머리 피스톤(40)의 이동량의 비율을 전환하는 전환 제어를 실행하는 경우의 처리에 관해 도 5 및 도 6을 참조하여 설명한다.
도 5를 참조하여, 단계 S21에서, 입력 로드(7)의 이동량이 임계값 이상인지의 여부를 판정한다. 입력 로드(7)의 이동량이 정해진 임계값 미만인 경우는, 단계 S22에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 정해진 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치(이동량)를 결정한다. 또, 입력 로드(7)의 이동량이 임계값 이상인 경우는, 단계 S23에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율보다 작은 제2 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 그리고, 단계 S24에서, 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다.
도 5에 나타내는 제어를 적용한 경우의 브레이크 페달(100)의 이동량(스트로크; 도면에서 S로 나타냄)과, 브레이크 페달(100)의 답력(도면에서 F로 나타냄)의 관계를 도 6에 나타낸다. 도 6을 참조하여, 운전자가 브레이크 페달(100)을 밟지 않고 있는 비제동 위치(S31)(스트로크 0)의 상태에서 브레이크 페달(100)을 밟으면, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)이 이동한다. 이 때, 중립 스프링(19A, 19B)의 스프링력에 더하여, 마스터 실린더(9) 내의 액압의 상승에 의해, 그 반력이 브레이크 페달(100)에 작용함으로써 브레이크 페달의 답력이 증대한다.
그리고, 입력 로드(7)의 이동량이 정해진 임계값인 전환점(S32)에 도달했을 때, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율로부터 이것보다 작은 제2 비율로 전환된다. 이 때, 제어를 전환하는 전환점(S32)은 제1 비율에 의한 제어에 있어서, 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대[전동 모터(20)의 출력이 최대]가 되는 제1 전부하점(S33)보다 작아지도록 설정된다.
전환점(S32)으로부터 제2 비율에 의한 제어가 실행되어, 제2 비율에 의한 제어에 있어서, 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대[전동 모터(20)의 출력이 최대]가 되는 제2 전부하점(S34)에 이른다. 제2 전부하점(S34)에 도달한 후에는, 프라이머리 피스톤(40)은 정지하고, 운전자의 브레이크 페달 답력에 의해 입력 로드(7)만이 전진한다. 이 때, 브레이크 페달(100)의 스트로크에 대한 반력의 증대 비율이 작아진다. 그리고, 입력 로드(7)가 접촉점(S35)까지 이동하면, 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉한다. 입력 로드(7)의 이동량이 접촉점(S35)에 도달한 후에는, 운전자의 브레이크 페달 답력에 의해 입력 로드(7) 및 입력 피스톤(16)과 함께 프라이머리 피스톤(40)이 추진되기 때문에, 브레이크 페달(100)의 스트로크에 대한 답력의 증대 비율이 커진다. 또, 접촉점(S35)은 마스터압 제어 기구(4)의 각 부의 치수, 마스터 실린더(9)의 액압 회로의 하류 강성, 전동 모터(20)의 최대 출력 등에 의존한다. 여기서, 제2 전부하점(S34)과 접촉점(S35)을 일치시킴으로써, 답력의 기울기가 완만해지는 제2 전부하점(S34)으로부터 접촉점(S35)까지의 구간이 없어지기 때문에, 브레이크 페달(100)의 이동량에 대한 답력의 변동이 완화되어 브레이크 페달(100)의 조작감이 개선된다. 또, 마스터 실린더(9)의 액압 회로의 하류 강성이란, 액압 브레이크 장치(11a~11d)의 필요 액량, 필요 액압을 가리키며, 액압 브레이크 장치(11a~11d)는 사용 상황에 따라 목표 감속도에 대한 필요 액량, 필요 액압이 변화하도록 되어 있다. 구체적으로는, 액압 브레이크 장치(11a~11d)에 설치되어 있는 마찰 패드가 온도나 마모 정도에 따라 그 경도가 변화한다. 예를 들어, 마찰 패드의 온도가 상승하여 부드러워진 경우에는, 하류 강성이 낮아지는 경향이 있고, 마찰 패드의 마모가 진행되어 딱딱해진 경우에는, 하류 강성이 높아지는 경향이 있다.
이와 같이, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을, 제1 비율로부터 제1 비율보다 작은 제2 비율로 전환하는 전환 제어를 실행함으로써, 전동 모터(20)의 출력이 최대가 되는 전부하점 및 입력 피스톤이 프라이머리 피스톤(40)에 접촉하는 접촉점에서의 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
다음으로, 전환점(S32) 및 제2 전부하점(S34)의 설정 방법에 관해, 그 구체예를 제1~제3 설정 방법으로서 설명한다. 또, 이 설정 방법은, 이하의 제1~제3 설정 방법에 한정되는 것은 아니고, 다른 설정 방법을 취할 수 있는 것이다. 제1 설정 방법에서는, 전환점(S32)과 제2 전부하점(S34) 사이의 기울기(α1)에 기초하여 설정한다. 전환점(S32)은 전술한 바와 같이 제1 전부하점(S33)보다 작아지도록 설정하지만, 사용 빈도가 높은, 브레이크 답력이 작은 영역에서는, 배력비가 커지는 제1 비율에 의한 제어를 행할 수 있도록 전환점(S32)을 결정하는 것이 좋다. 이렇게 함으로써, 저답력측에서는 충분한 배력비를 유지하면서, 브레이크 페달(100)을 더 밟았을 때의 조작감을 개선할 수 있다. 또, 기울기(α1)를 완만하게 하면(제2 비율을 작게 하면), 전환점(S32)에서의 페달 답력의 변화가 급격해지기 때문에, 비제동 위치(S31)로부터 제2 전부하점(S34)까지의 브레이크 페달(100)의 이동량에 대한 답력의 변화가 원활해지도록 기울기(α1)를 결정하는 것이 좋다.
제2 설정 방법에서는, 제2 전부하점(S34)의 위치 및 전환점(S32)과 제2 전부하점(S34) 사이의 기울기(α1)에 기초하여 설정한다. 제2 전부하점(S34)이 접촉점(S35)보다 큰 경우, 전동 모터(20)가 최대 출력에 도달하기 전에 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉하게 되어, 전동 모터(20)의 출력에 대하여 충분한 배력비를 얻을 수 없어 효율이 나쁘기 때문에, 제2 전부하점(S34)은 접촉점(S35)과 일치시키는 것이 바람직하다. 여기서, 접촉점(S35)은 마스터 실린더(9)의 액압 회로의 하류 강성에 의해 변화하기 때문에, 제2 전부하점(S34)은 이 하류 강성을 고려하여 반드시 접촉점(S35)보다 작아지도록 설정한다. 또, 제2 전부하점(S34)은 마스터압 제어 장치(3)의 입력 신호에 기초하여 결정될 수 있지만, 입력 신호의 최대 오차를 고려하여, 반드시 접촉점(S35)보다 작아지도록 설정되는 것이 좋다. 기울기(α1)를 완만하게 하면(제2 비율을 작게 하면), 전환점(S32)에서의 페달 답력의 변화가 급격해지기 때문에, 비제동 위치(S31)로부터 제2 전부하점(S34)까지의 브레이크 페달(100)의 이동량에 대한 답력의 변화가 원활해지도록 기울기(α1)를 결정하는 것이 좋다. 제2 전부하점(S34)을 통과하여, 기울기(α1)를 갖는 선분과, 비제동 위치(S31)로부터 제1 전부하점(S33)의 사이의 선분과의 교점이 전환점(S32)이 된다. 전술한 제1 설정 방법에서는, 제2 전부하점(S34)으로부터 접촉점(S35)이 떨어져 버리는 경우가 있기 때문에, 비제동 위치(S31)로부터 접촉점(S35)까지의 기울기 변화를 원활하게 하고자 하는 경우는, 제2 설정 방법을 이용하는 것이 좋다.
또, 제3 설정 방법에서는, 전환점(S32) 및 제2 전부하점(S34)을 설정한다. 이 경우도, 제2 전부하점(S34)은 반드시 접촉점(S35)보다 작아지도록 한다. 이에 따라, 저답력 영역에서는 충분한 배력비를 유지하면서, 전역에 걸쳐 필요한 제동력을 얻을 수 있다.
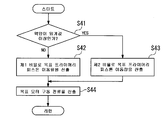
다음으로, 제2 실시형태로서, 제어 전환 입력(I2)을 마스터 실린더(9) 내의 브레이크 액압으로 하고, 마스터 실린더(9) 내의 브레이크 액압이 임계값 이상인지의 여부에 따라서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 전환하는 경우의 처리에 관해 도 7 및 도 8을 참조하여 설명한다.
도 7을 참조하여, 단계 S41에서, 마스터 실린더(9) 내의 브레이크 액압이 임계값 이상인지의 여부를 판정한다. 마스터 실린더(9) 내의 브레이크 액압이 임계값 미만인 경우는, 단계 S42에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 또, 마스터 실린더(9) 내의 브레이크 액압이 임계값 이상인 경우는, 단계 S43에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율보다 작은 제2 비율이 되도록, 프라이머리 피스톤(40)의 목표 위치를 결정한다. 그리고, 단계 S24에서, 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다.
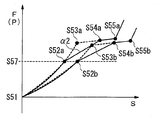
도 7에 나타내는 전환 제어를 적용한 경우의 브레이크 페달(100)의 이동량(스트로크; 도면에서 S로 나타냄)과, 브레이크 페달(100)의 답력(도면에서 F로 나타냄), 및 마스터 실린더(9) 내의 브레이크 액압(도면에서 P로 나타냄)과의 관계를 도 8에 나타낸다. 여기서, 마스터 실린더(9) 내의 브레이크 액압은 운전자에 의한 브레이크 페달(100)의 답력에 거의 비례하기 때문에, 브레이크 페달(100)의 이동량과 브레이크 액압의 관계는 브레이크 페달(100)의 이동량과 운전자에 의한 브레이크 페달(100)의 답력의 관계에 거의 일치하게 된다. 또, 도 8에서, 곡선(S52a~S55a)은 곡선(S52b~S55b)에 비하여 마스터 실린더(9)의 액압 회로의 하류 강성이 높은 경우의 추이를 나타내고 있다.
비제동 위치(S51)(스트로크 0)에서 브레이크 페달(100)을 밟으면, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)이 이동한다. 그리고, 마스터 실린더(9) 내의 액압이 임계값(S57)에 도달했을 때[전환점(S52a, S52b)], 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율로부터 제2 비율이 되도록 제어를 전환한다. 여기서, 제어를 전환하는 마스터 실린더(9) 내의 액압의 임계값(S57)은 제1 비율에 의한 제어에 있어서 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대(전동 모터(20)의 출력이 최대)가 되는 전부하점(S53a, S53b)보다 작아지도록 설정한다. 이에 따라, 마스터 실린더(9) 내의 브레이크 액압이 임계값(S57)을 통과하는 전후에서의 브레이크 페달(100)의 이동량에 대한 답력의 기울기 변화량은 제어를 전환하지 않는 경우에 있어서(도 8의 파선 참조), 전부하점(S53a, S53b)을 통과하는 전후에서의 브레이크 페달(100)의 이동량에 대한 답력의 기울기 변화량보다 작아지기 때문에, 전부하점(S53a, S53b)에 있어서 브레이크 페달(100)의 답력이 급격히 저하한다고 하는 위화감을 경감할 수 있다.
전환점(S52a, S52b)에서 제1 비율로부터 제2 비율로 제어를 전환한 후에는, 제2 비율에 의한 제어가 실행되어, 제2 비율에 의한 제어에 있어서 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대[전동 모터(20)의 출력이 최대]가 되는 제2 전부하점(S54a, S54b)에 이른다. 제2 전부하점(S54a, S54b)에 도달한 후에는, 프라이머리 피스톤(40)은 정지하고, 운전자의 브레이크 페달 답력에 의해 입력 로드(7)만이 전진한다. 그리고, 입력 로드(7)가 접촉점(S55a, S55b)까지 이동하면, 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉한다. 그 후에는, 운전자의 브레이크 페달 답력에 의해, 입력 로드(7) 및 입력 피스톤(16)과 함께 프라이머리 피스톤(40)이 추진되어, 브레이크 페달(100)의 스트로크에 대한 답력의 상승이 증대한다.
이 때, 브레이크 페달(100)의 스트로크에 대한 답력은, 전환점(S52a, S52b) 및 제2 전부하점(S54a, S54b)을 거쳐 접촉점(S55a, S55b)에 이르는 것에 의해, 제1 전부하점(S53a, S53b)을 거쳐 접촉점(S55a, S55b)에 이르는 경우에 비하여, 스트로크에 대한 답력의 변동이 작아지기 때문에, 브레이크 페달(100)의 조작감을 개선할 수 있다.
제1 비율로부터 제2 비율로의 전환점(S52a, S52b)을 브레이크 액압의 임계값(S57)에 따라 정함으로써, 마스터 실린더(9)의 액압 회로의 하류 강성이 변화한 경우에도, 브레이크 액압이 임계값(S57)에 도달할 때까지는, 큰 배력비를 얻을 수 있는 제1 비율에 의한 제어를 실행하기 때문에, 사용 빈도가 높은 저답력 영역에서는 충분히 큰 배력비를 얻을 수 있고, 고답력 영역에서는 브레이크 페달(100)을 밟았을 때의 조작감을 개선할 수 있다.
다음으로, 제2 전부하점(S54a, S54b)의 설정 방법에 관해, 그 구체예를 제1, 제2 설정 방법으로서 설명한다. 또, 이 설정 방법은 이하의 제1, 제2 설정 방법에 한정되는 것은 아니고, 다른 설정 방법을 취할 수 있는 것이다. 또, 곡선(S52a~S55a)에 관해 설명하지만, 곡선(S52b~S55b)에 관해서도 동일한 방법을 적용할 수 있다. 제1 설정 방법에서는, 우선 전환점(S52a)과 제2 전부하점(S54a) 사이의 곡선의 기울기(α2)를 결정하여, 이것에 기초하여 설정한다. 기울기(α2)를 완만하게 하면 전환점(S52a)에서의 브레이크 페달 답력의 변화가 급격해지기 때문에, 비제동 위치(S51)로부터 제2 전부하점(S54a)까지의 기울기가 원활해지도록 α2를 결정한다.
제2 설정 방법에서는, 제2 전부하점(S54a)을 입력 로드(7)의 이동량(스트로크)에 기초하여 설정한다. 이 경우, 제2 전부하점(S54a)과, 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉하는 접촉점(S55a)과의 액압차를 작게 하는 것이 좋다. 제2 전부하점(S54a)은 마스터 실린더(9) 내의 액압에 기초하여 설정해도 좋지만, 마스터압 센서(56, 57)의 검출값에 오차가 있는 경우, 제2 전부하점(S54a)의 위치도 바뀌기 때문에, 오차가 생기기 어려운 입력 로드(7)의 이동량에 기초하여 설정해도 좋다. 또, 접촉점(S55a)은 마스터 실린더(9)의 액압 회로의 하류 강성에 의해 변화하기 때문에, 제2 전부하점(S54a)은 반드시 접촉점(S55a)보다 작아지도록 설정한다.
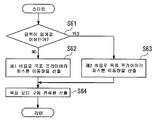
다음으로, 제3 실시형태로서, 제어 전환 입력(I2)을 운전자에 의한 브레이크 페달(100)의 답력으로 하고, 답력이 정해진 임계값 이상인지의 여부에 따라서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 전환하는 경우의 처리에 관해, 도 9를 참조하여 설명한다.
도 9를 참조하여, 단계 S61에서, 운전자에 의한 브레이크 페달(100)의 답력이 임계값 이상인지의 여부를 판정한다. 답력이 임계값 미만인 경우는, 단계 S62에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 답력이 임계값 이상인 경우는, 단계 S63에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율보다 작은 제2 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 이 때, 판정에 이용하는 답력은, 브레이크 페달(100)에 부착된 답력 센서를 이용하여 취득해도 좋고, 또는 도시하지 않은 추정 수단에 의해, 입력 로드(7)의 위치, 프라이머리 피스톤(40)의 위치, 마스터 실린더(9) 내의 액압, 중립 스프링(19A, 19B)의 스프링력 등으로부터 계산에 의해 구한 추정 답력을 이용해도 좋다. 그리고, 단계 S64에서 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다.
도 9에 나타내는 제어를 적용한 경우의 브레이크 페달(100)의 이동량(스트로크)과 답력의 관계는, 도 8에 있어서, 브레이크 액압의 임계값(S57)을 답력의 임계값으로 치환한 것과 동일해진다.
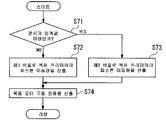
다음으로, 제4 실시형태로서, 제어 전환 입력(I2)을 전동 모터(20)에 흐르는 전류값으로 하여, 이 전류값이 정해진 임계값 이상인지의 여부에 따라서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 전환하는 경우의 처리에 관해, 도 10 및 도 11을 참조하여 설명한다.
도 10을 참조하여, 단계 S71에서, 전동 모터(20)에 흐르는 전류값이 임계값 이상인지의 여부를 판정한다. 전류값이 임계값 미만인 경우는, 단계 S72에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 전류값이 임계값 이상인 경우는, 단계 S73에서 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율보다 작은 제2 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 그리고, 단계 S64에서 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다.
도 10에 나타내는 제어를 적용한 경우의 브레이크 페달(100)의 이동량(스트로크; 도면에서 S로 나타냄)과 답력의 관계를 도 11에 나타낸다. 이 경우, 전동 모터(20)에 흐르는 전류값(도면에서 I로 나타냄), 전동 모터(20)의 토크 및 마스터 실린더(9) 내의 브레이크 액압과, 브레이크 페달(100)의 답력(도면에서 F로 나타냄)은 거의 비례 관계에 있기 때문에, 도 11의 곡선(S81~S85)으로 표시되는 특성은 도 8에 표시되는 특성과 거의 일치한다. 여기서, 제1 비율로부터 제2 비율로 변경하기 위한 전류의 임계값(S87)은 제1 비율에 의한 제어에 있어서, 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대(전동 모터(20)의 출력이 최대)가 되는 제1 전부하점(S83)의 전류값보다 작아지도록 설정한다.
이에 따라, 전동 모터(20)에 흐르는 전류값이 임계값(S87) 및 제2 전부하점(S84)을 통과하는 전후에서의 브레이크 페달(100)의 이동량에 대한 답력의 기울기 변화량은 제1 비율에 의한 제어에 있어서 제1 전부하점(S83)을 통과하는 전후에서의 답력의 기울기 변화량(도 11의 파선 참조)보다 작아지기 때문에, 전부하점에 있어서 브레이크 페달(100)의 답력이 갑자기 저하하는 것에 의한 운전자의 위화감을 경감할 수 있다.
다음으로, 전동 모터(20)의 코일의 과열 방지 등의 목적으로 전동 모터(20)에 통전하는 최대 전류가 제한되어 있는 경우에 관해, 곡선(S81~S85a)을 참조하여 설명한다. 이 경우, 입력 로드(7)의 이동량과 프라이머리 피스톤(40)의 이동량의 비율을 제1 비율로부터 제2 비율로 변화시키는 전류의 임계값을, 임계값(S87)보다 작은 임계값(S87a)으로 변경함으로써, S81~S82a~S85a의 구간에서의 브레이크 페달(100)의 답력의 기울기 변화가 작아져, 운전자의 위화감을 경감할 수 있다.
다음으로, 제5 실시형태로서, 제어 전환 입력(I2)을 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량으로 하고, 이 상대 변위량이 정해진 임계값 이상인지의 여부에 따라서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 전환하는 경우의 처리에 관해, 도 12 내지 도 14를 참조하여 설명한다.
도 12를 참조하여, 단계 S91에서, 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량이 임계값 이상인지의 여부를 판정한다. 상대 변위량이 임계값 미만인 경우, 단계 S92에서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 이들의 상대 변위를 증대시키는 제1 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 상대 변위량이 임계값 이상인 경우, 단계 S93에서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이, 제1 비율보다 작고 상대 변위량을 감소시키는 제2 비율이 되도록 프라이머리 피스톤(40)의 목표 위치를 결정한다. 그리고, 단계 S94에서 모터 구동 수단(301)에 의해, 프라이머리 피스톤(40)이 목표 위치로 이동하도록, 전동 모터(20)에 구동 전류를 공급한다.
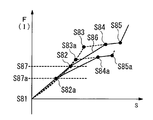
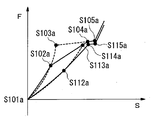
도 12에 나타내는 제어를 적용한 경우의 브레이크 페달(100)의 이동량(스트로크; 도면에서 S로 나타냄)과, 브레이크 페달(100)의 답력(도면에서 F로 나타냄)의 관계를 도 13에 나타낸다. 도 13의 곡선(S101a~S105a)을 참조하여, 운전자가 브레이크 페달(100)을 밟지 않고 있는 비제동 위치(S101a)(스트로크 0)의 상태에서 브레이크 페달(100)을 밟으면, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율이 되도록 프라이머리 피스톤(40)이 이동하고, 입력 로드(7)의 이동량에 따라서, 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량이 증대한다. 이 때, 중립 스프링(19A, 19B)의 스프링력에 더하여, 마스터 실린더(9) 내의 액압 상승에 의해, 그 반력이 브레이크 페달(100)에 작용함으로써 브레이크 페달의 답력이 증대한다.
그리고, 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량이 임계값이 되는 전환점(S102a)에 도달했을 때, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율이 제1 비율로부터 이것보다 작은 제2 비율로 전환된다. 이 때, 제어를 전환하는 전환점(S102a)은 제1 비율에 의한 제어에 있어서, 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대[전동 모터(20)의 출력이 최대]가 되는 제1 전부하점(S103a)보다 작아지도록 설정한다.
전환점(S102a)으로부터 제2 비율에 의한 제어가 실행되어, 제2 비율에 의한 제어에 있어서 전동 모터(20)에 의한 프라이머리 피스톤(40)의 이동량이 최대[전동 모터(20)의 출력이 최대]가 되는 제2 전부하점(S104a)에 이른다. 제2 전부하점(S104a)에 도달한 후에는, 프라이머리 피스톤(40)은 정지하고, 운전자의 브레이크 페달 답력에 의해 입력 로드(7)만이 전진한다. 이 때, 브레이크 페달(100)의 스트로크에 대한 답력의 증대 비율이 작아진다. 그리고, 입력 로드(7)가 접촉점(S105a)까지 이동하면, 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉한다. 입력 로드(7)의 이동량이 접촉점(S105a)에 도달한 후에는, 운전자의 브레이크 페달 답력에 의해 입력 로드(7) 및 입력 피스톤(16)과 함께 프라이머리 피스톤(40)이 추진되기 때문에, 브레이크 페달(100)의 스트로크에 대한 답력의 증대 비율이 커진다.
이와 같이, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 비율을 제1 비율로부터 이것보다 작은 제2 비율로 전환함으로써, 전동 모터(20)의 출력이 최대가 되는 전부하점 및 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉하는 접촉점에서의 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
여기서, 입력 로드(7)의 이동량에 대한 프라이머리 피스톤(40)의 이동량의 제1 비율은 마스터압 제어 장치(3)에 의해 적절하게 변경될 수 있다. 도 13의 곡선(S101a~S115a)은 전술한 곡선(S101a~S105a)에 대하여, 제1 비율을 작게 한 경우의 입력 로드(7)의 이동량과 브레이크 페달(100)의 답력의 관계를 나타내고 있다.
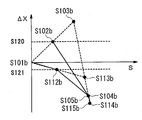
또, 도 14는 브레이크 페달(100)[즉, 입력 로드(7)]의 이동량(도면에서 S로 나타냄)과, 입력 로드(7)와 프라이머리 피스톤(40)의 상대 변위량(도면에서 ΔX로 나타냄)과의 관계를 나타내고 있고, 도 13의 S101a~S105a의 특성은 도 14의 S101b~S105b의 특성에 대응하고, 도 13의 S101a~S115a의 특성은 도 14의 S101b~S115b의 특성에 대응한다. 도 14를 참조하여, 예를 들어, 제1 비율에 의한 제어가, 입력 로드(7)의 이동량에 대하여 프라이머리 피스톤(40)의 이동량이 커지는 곡선(S101b~S105b)[전부하점(S103b)에서 상대 변위 최대]으로 표시되는 특성을 갖고 있는 경우(진행 제어), 전부하점(S103b)의 상대 변위량보다 작은 상대 변위량의 임계값(S120)을 설정한다. 이에 따라, 상대 변위량이 임계값(S120)에 도달했을 때, 제1 비율보다 작고 상대 변위량을 감소시키는 제2 비율에 의한 제어로 전환함으로써, 전동 모터(20)가 최대 출력이 되는 제2 전부하점(S104a)(도 13 참조) 및 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉하는 접촉점(S105a)(도 13 참조)에서의 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
또, 제1 비율에 의한 제어가, 입력 로드(7)에 이동량에 대하여 프라이머리 피스톤(40)의 이동량이 작아지는 곡선(S101b~S115b)[전부하점(S113b)]으로 표시되는 특성을 갖고 있는 경우(지연 제어), 전부하점(S113b)의 상대 변위량보다 절대치가 작은 상대 변위량의 임계값(S121)을 설정한다. 이에 따라, 상대 변위량이 임계값(S121)에 도달했을 때, 제1 비율보다 작고 상대 변위량을 감소시키는[프라이머리 피스톤(40)의 입력 로드(7)에 대한 지연을 증대시키는] 제2 비율에 의한 제어로 전환함으로써, 전동 모터(20)가 최대 출력이 되는 제2 전부하점(S114a)(도 13 참조) 및 입력 피스톤(16)이 프라이머리 피스톤(40)에 접촉하는 접촉점(S115a)(도 13 참조)에서의 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
이와 같이, 임계값(S120, 121)은 제1 비율에 따라서, 비제동 위치(S101b)로부터 전부하점(S103b)의 사이, 비제동 위치(S101b)로부터 전부하점(S113b)의 사이에 적절하게 설정함으로써, 제1 비율로부터 제2 비율로의 전환을 실행할 수 있다.
상기 실시형태에서는, 브레이크 페달의 조작에 의해 진퇴 이동하는 입력 부재와, 이 입력 부재에 대하여 상대 이동 가능하게 설치되며, 전진에 의해 마스터 실린더 내에 브레이크 액압을 발생시켜, 상기 입력 부재의 전진에 의해 이 입력 부재가 접촉하는 배력 부재와, 상기 배력 부재를 구동시키는 전동 액츄에이터와, 상기 입력 부재의 이동에 기초하여 상기 전동 액츄에이터의 작동을 제어하는 제어 수단을 구비하고, 상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량을 변화시켜 상기 마스터 실린더 내에 브레이크 액압을 발생시키는 것이 가능한 전동 배력 장치에 있어서, 상기 제어 수단은, 상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하여 최대 출력을 발생시키는 제1 전부하 상태가 되기 전에, 상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량의 비율을 작게 전환하는 전환 제어를 실행하도록 되어 있다.
이러한 구성에 의해, 브레이크 페달의 조작에 대한 반력의 급격한 변화를 억제하여, 브레이크 페달의 조작감을 향상시킬 수 있다.
상기 실시형태에 있어서, 상기 제어 수단은, 상기 전환 제어를 실행한 후, 상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하여 최대 출력을 발생시키는 제2 전부하 상태가 된 후, 상기 입력 부재가 상기 배력 부재에 접촉하도록 상기 전동 액츄에이터의 작동을 제어하도록 되어 있다.
상기 제1 실시형태에 있어서, 상기 제어 수단은, 상기 입력 부재의 이동량이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하도록 되어 있다.
상기 제2 실시형태에 있어서, 상기 제어 수단은, 상기 마스터 실린더 내의 브레이크 액압이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하도록 되어 있다.
상기 제5 실시형태에 있어서, 상기 제어 수단은, 상기 입력 부재와 상기 배력 부재의 상대 변위량이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하도록 되어 있다.
상기 제3 실시형태에 있어서, 상기 제어 수단은, 상기 브레이크 페달의 답력이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하도록 되어 있다.
상기 제4 실시형태에 있어서, 상기 제어 수단은, 상기 전동 액츄에이터에 흐르는 전류값이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하도록 되어 있다.
상기 실시형태에 있어서, 상기 제어 수단은, 상기 전환 제어의 실행 전에는, 상기 입력 부재의 이동량에 대하여 상기 배력 부재의 이동량이 커지도록 상기 전동 액츄에이터의 작동을 제어하고, 상기 전환 제어의 실행 후에는, 상기 입력 부재의 이동량에 대하여 상기 배력 부재의 이동량이 작아지도록 상기 전동 액츄에이터의 작동을 제어하도록 되어 있다.
상기 실시형태에 있어서, 상기 제어 수단은 차량 정지중에 상기 브레이크 페달이 조작된 경우에만, 상기 전환 제어를 실행하도록 되어 있다.
이러한 구성에 의해, 차량 주행중에는, 어느 정도 배력비를 높이면서, 차량 정지중 또는 정지 직전에서는, 브레이크 페달(100)의 답력의 변동을 작게 하여, 브레이크 페달(100)의 조작감을 개선할 수 있다.
3 : 마스터압 제어 장치(제어 수단)
4 : 마스터압 제어 기구(전동 배력 장치)
7 : 입력 로드(입력 부재)
9 : 마스터 실린더
16 : 입력 피스톤(입력 부재)
20 : 전동 모터(전동 액츄에이터)
40 : 프라이머리 피스톤(배력 부재)
100 : 브레이크 페달
4 : 마스터압 제어 기구(전동 배력 장치)
7 : 입력 로드(입력 부재)
9 : 마스터 실린더
16 : 입력 피스톤(입력 부재)
20 : 전동 모터(전동 액츄에이터)
40 : 프라이머리 피스톤(배력 부재)
100 : 브레이크 페달
Claims (10)
- 브레이크 페달의 조작에 의해 진퇴 이동하는 입력 부재와,
이 입력 부재에 대하여 상대 이동 가능하게 설치되며, 전진에 의해 마스터 실린더 내에 브레이크 액압을 발생시키고, 상기 입력 부재의 전진에 의해 이 입력 부재가 접촉하는 배력 부재와,
상기 배력 부재를 구동시키는 전동 액츄에이터와,
상기 입력 부재의 이동에 기초하여 상기 전동 액츄에이터의 작동을 제어하는 제어 수단
을 구비하고,
상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량을 변화시켜 상기 마스터 실린더 내에 브레이크 액압을 발생시키는 것이 가능한 전동 배력 장치에 있어서,
상기 제어 수단은,
상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하여 최대 출력을 발생시키는 제1 전(全)부하 상태가 되기 전에, 상기 입력 부재의 이동량에 대한 상기 배력 부재의 이동량의 비율을 작게 전환하는 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치. - 제1항에 있어서, 상기 제어 수단은, 상기 전환 제어의 실행 전에는, 상기 입력 부재의 이동량에 대하여 상기 배력 부재의 이동량이 커지도록 상기 전동 액츄에이터의 작동을 제어하고, 상기 전환 제어의 실행 후에는, 상기 입력 부재의 이동량에 대하여 상기 배력 부재의 이동량이 작아지도록 상기 전동 액츄에이터의 작동을 제어하는 것을 특징으로 하는 전동 배력 장치.
- 제1항에 있어서, 상기 제어 수단은, 차량 정지중에 상기 브레이크 페달이 조작된 경우에만, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 전환 제어를 실행한 후에, 상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하고, 상기 전동 액츄에이터의 출력이 전환 후의 제어에 있어서 최대 출력을 발생시키는 제2 전부하 상태가 된 후에, 상기 입력 부재가 상기 배력 부재에 접촉하도록 상기 전동 액츄에이터의 작동을 제어하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 전환 제어를 실행한 후에, 상기 입력 부재의 전진에 의해, 상기 전동 액츄에이터의 출력이 증대하고, 상기 전동 액츄에이터의 출력이 전환 후의 제어에 있어서 최대 출력을 발생시키는 제2 전부하 상태가 되는 동시에, 상기 입력 부재가 상기 배력 부재에 접촉하도록 상기 전동 액츄에이터의 작동을 제어하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 입력 부재의 이동량이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 마스터 실린더 내의 브레이크 액압이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 입력 부재와 상기 배력 부재의 상대 변위량이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 브레이크 페달의 답력이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
- 제1항 내지 제3항 중 어느 한 항에 있어서, 상기 제어 수단은, 상기 전동 액츄에이터에 흐르는 전류값이 정해진 임계값에 도달했을 때, 상기 전환 제어를 실행하는 것을 특징으로 하는 전동 배력 장치.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JPJP-P-2011-165549 | 2011-07-28 | ||
| JP2011165549A JP2013028273A (ja) | 2011-07-28 | 2011-07-28 | 電動倍力装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| KR20130014357A true KR20130014357A (ko) | 2013-02-07 |
Family
ID=47503331
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| KR1020120074991A KR20130014357A (ko) | 2011-07-28 | 2012-07-10 | 전동 배력 장치 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20130025273A1 (ko) |
| JP (1) | JP2013028273A (ko) |
| KR (1) | KR20130014357A (ko) |
| CN (1) | CN102897163A (ko) |
| DE (1) | DE102012213267A1 (ko) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150135315A (ko) * | 2013-03-29 | 2015-12-02 | 히다치 오토모티브 시스템즈 가부시키가이샤 | 브레이크 장치 및 해당 브레이크 장치의 배관 내의 대기 혼입 검출 방법 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20130133760A (ko) * | 2011-02-28 | 2013-12-09 | 히다치 오토모티브 시스템즈 가부시키가이샤 | 브레이크 제어 장치 |
| DE102011082950B4 (de) * | 2011-09-19 | 2013-08-01 | Ford Global Technologies, Llc | Verfahren zur Durchführung eines automatischen Bremsvorgangs |
| JP5982885B2 (ja) * | 2012-03-09 | 2016-08-31 | 日産自動車株式会社 | 制動制御装置 |
| JP2014139034A (ja) * | 2013-01-21 | 2014-07-31 | Hitachi Automotive Systems Ltd | 車両用電動倍力装置の制御装置 |
| US10005441B2 (en) * | 2013-04-30 | 2018-06-26 | Hitachi Automotive Systems, Ltd. | Electric booster |
| CN103437989A (zh) | 2013-06-18 | 2013-12-11 | 中国海洋石油总公司 | 一种高压流体混合泵控制系统及流体抽吸控制方法 |
| JP2015047949A (ja) | 2013-08-30 | 2015-03-16 | 日立オートモティブシステムズ株式会社 | ブレーキ制御装置 |
| DE102014206649B3 (de) * | 2014-04-07 | 2015-02-12 | Robert Bosch Gmbh | Steuervorrichtung und Verfahren zum Betreiben eines mit einem elektrischen Bremskraftverstärker ausgestatteten Bremssystems eines Fahrzeugs |
| DE102014211551A1 (de) * | 2014-06-17 | 2015-12-17 | Robert Bosch Gmbh | Elektromechanischer Bremskraftverstärker und Verfahren zum Betreiben eines elektromechanischen Bremskraftverstärkers |
| CN104097623B (zh) * | 2014-08-06 | 2016-08-31 | 邓伟文 | 一种车辆集成电液制动系统 |
| CN105015531B (zh) * | 2015-02-05 | 2018-10-02 | 南京理工大学 | 用于车辆的制动系统及具有该系统的车辆 |
| DE102015219303A1 (de) | 2015-10-06 | 2017-04-06 | Volkswagen Aktiengesellschaft | Fahrzeug, elektromechanischer Bremskraftverstärker, Zustandsregler und Verfahren zur Bestimmung einer elektromechanischen Soll-Bremskraft |
| CN105398440B (zh) * | 2015-12-07 | 2018-09-07 | 宁波拓普智能刹车系统有限公司 | 一种机电磁一体化制动助力装置 |
| CN105882638B (zh) * | 2016-05-23 | 2018-03-09 | 浙江大学台州研究院 | 用于汽车制动的线控助力器 |
| JP6623993B2 (ja) * | 2016-09-21 | 2019-12-25 | 株式会社アドヴィックス | 車両用制動装置 |
| US10046748B2 (en) | 2016-12-08 | 2018-08-14 | Robert Bosch Gmbh | Vehicle having brake system and method of operating |
| DE102017208685A1 (de) * | 2017-05-23 | 2018-11-29 | Robert Bosch Gmbh | Steuervorrichtung und Verfahren zum Betreiben eines elektromechanischen Bremskraftverstärkers eines Fahrzeugs |
| US10564662B2 (en) * | 2017-06-12 | 2020-02-18 | GM Global Technology Operations LLC | Systems and methods for determining pedal actuator states |
| KR102354168B1 (ko) * | 2017-06-28 | 2022-01-21 | 현대모비스 주식회사 | 전동 부스터 |
| FR3068939B1 (fr) * | 2017-07-13 | 2020-02-14 | Robert Bosch Gmbh | Systeme de freinage decouple a protection de retour de pedale |
| CN111094089B (zh) * | 2017-09-26 | 2022-07-22 | 日立安斯泰莫株式会社 | 电动助力装置 |
| KR101991257B1 (ko) * | 2017-10-27 | 2019-06-21 | 주식회사 만도 | 이중 권선형 모터 제어장치 및 제어방법 |
| KR102500083B1 (ko) * | 2018-03-08 | 2023-02-15 | 에이치엘만도 주식회사 | 전자식 브레이크 시스템 및 그 제어방법 |
| KR102488949B1 (ko) * | 2018-07-02 | 2023-01-16 | 현대모비스 주식회사 | Esc 통합형 제동 시스템의 abs 제어 장치 및 방법 |
| DE102018215653A1 (de) * | 2018-09-14 | 2020-03-19 | Hyundai Motor Company | Bremssystem zum Abbremsen eines Elektrofahrzeugs |
| DE102019206612B3 (de) * | 2019-05-08 | 2020-07-16 | Volkswagen Aktiengesellschaft | Verfahren zur Steuerung eines elektromechanischen Bremssystems sowie elektromechanisches Bremssystem |
| DE102019208393A1 (de) * | 2019-06-07 | 2020-12-10 | Robert Bosch Gmbh | Steuereinheit und Verfahren zum Betreiben eines Bremssystems eines Fahrzeugs |
| CN110281897A (zh) * | 2019-06-13 | 2019-09-27 | 泰牛汽车技术(苏州)有限公司 | 汽车电动助力制动器、其使用方法及汽车制动系统 |
| KR102183953B1 (ko) * | 2019-08-27 | 2020-11-27 | 현대모비스 주식회사 | 전동부스터를 이용한 제동장치 및 그 제어방법 |
| KR20210105684A (ko) * | 2020-02-19 | 2021-08-27 | 현대모비스 주식회사 | 전동기계식 브레이크 장치 |
| CN111497811A (zh) * | 2020-05-06 | 2020-08-07 | 北京理工大学 | 一种多模式电子液压制动器助力系统及控制方法 |
| KR102436009B1 (ko) * | 2020-11-04 | 2022-08-23 | 현대모비스 주식회사 | 회생제동 및 유압제동을 수행하는 차량의 브레이크 시스템 및 그 제어방법 |
| CN112550546B (zh) * | 2020-11-23 | 2022-04-15 | 江苏科技大学 | 一种电动车助力运行控制系统及其控制方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3849336B2 (ja) * | 1999-02-17 | 2006-11-22 | トヨタ自動車株式会社 | 車両の制動制御装置 |
| JP2002321611A (ja) * | 2001-04-26 | 2002-11-05 | Bosch Braking Systems Co Ltd | 電動式ブレーキ倍力装置 |
| WO2007034961A1 (ja) * | 2005-09-26 | 2007-03-29 | Hitachi, Ltd. | 電動倍力装置 |
| JP4826952B2 (ja) | 2006-12-28 | 2011-11-30 | 日立オートモティブシステムズ株式会社 | 電動倍力装置 |
| JP5024611B2 (ja) * | 2007-06-05 | 2012-09-12 | 日立オートモティブシステムズ株式会社 | 電動倍力装置およびその製造方法 |
| DE102008039306A1 (de) * | 2007-11-21 | 2009-05-28 | Continental Teves Ag & Co. Ohg | Bremsbetätigungseinheit |
| JP2009173266A (ja) * | 2007-12-27 | 2009-08-06 | Hitachi Ltd | 電動倍力装置およびタンデムマスタシリンダ |
| JP5206086B2 (ja) * | 2008-04-15 | 2013-06-12 | 日産自動車株式会社 | 電動式ブレーキ倍力装置 |
| JP2011165549A (ja) | 2010-02-12 | 2011-08-25 | Seiko Epson Corp | 光源装置 |
-
2011
- 2011-07-28 JP JP2011165549A patent/JP2013028273A/ja active Pending
-
2012
- 2012-07-10 KR KR1020120074991A patent/KR20130014357A/ko not_active Application Discontinuation
- 2012-07-26 US US13/558,756 patent/US20130025273A1/en not_active Abandoned
- 2012-07-27 CN CN2012102650240A patent/CN102897163A/zh active Pending
- 2012-07-27 DE DE102012213267A patent/DE102012213267A1/de not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150135315A (ko) * | 2013-03-29 | 2015-12-02 | 히다치 오토모티브 시스템즈 가부시키가이샤 | 브레이크 장치 및 해당 브레이크 장치의 배관 내의 대기 혼입 검출 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE102012213267A1 (de) | 2013-01-31 |
| CN102897163A (zh) | 2013-01-30 |
| US20130025273A1 (en) | 2013-01-31 |
| JP2013028273A (ja) | 2013-02-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR20130014357A (ko) | 전동 배력 장치 | |
| JP5672430B2 (ja) | ブレーキ制御装置 | |
| KR101990643B1 (ko) | 브레이크 제어 장치 | |
| JP5704311B2 (ja) | 電動倍力装置及びその自動ブレーキの制御方法 | |
| JP4762283B2 (ja) | ブレーキ制御装置 | |
| JP5514805B2 (ja) | ブレーキ制御装置 | |
| KR102050471B1 (ko) | 브레이크 제어 장치 | |
| JP6849822B2 (ja) | 電動倍力装置およびブレーキ制御装置 | |
| US10005442B2 (en) | Brake control device | |
| JP2014046857A (ja) | 電動倍力装置 | |
| JP5545487B2 (ja) | ブレーキ制御装置 | |
| JP2014094707A (ja) | ブレーキ制御装置 | |
| JP5769787B2 (ja) | ブレーキ制御装置 | |
| JP5545490B2 (ja) | ブレーキ制御装置 | |
| JP5982885B2 (ja) | 制動制御装置 | |
| JP5775290B2 (ja) | ブレーキ制御装置 | |
| JP2014091444A (ja) | ブレーキ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WITN | Application deemed withdrawn, e.g. because no request for examination was filed or no examination fee was paid |